





Область применения.
Двигатели постоянного тока подразделяют на двигатели с независимым, последовательным и смешанным возбуждением. Двигатели с независимым возбуждением применяют, как правило, для длительного режима работы, когда требуется широкое регулирование скорости вращения станочного электропривода трубопроката, листо-прокатных станов и т.д. Эти двигатели реже применяются в режиме повторно кратковременной нагрузки, где требуется устойчивая постоянная и полная скорость. Двигатели постоянного тока с независимым возбуждением (ДПТ НВ) широко применяют в системе регулирования генератора-двигателя, в системе ТПД, в системе ШИР-Д (широко-импульсное регулирование-двигатель).
Двигатель последовательного возбуждения применяют для вспомогательных механизмов прокатных станов, для подъемных кранов на приводах хода моста и хода тележки. При их применении на кранах, уменьшается число троллей.
ДПТ ПВ широко используют на транспорте. Постоянный ток здесь удобен тем, что при нем достаточно иметь один троллей, а последовательное возбуждение по той причине, что двигатель при этом не боится больших снижений напряжения, которые имеют место при питании троллем на большие расстояния и лучше выдерживает перегрузку на подъемах и спусках, благодаря тому, что с увеличением тока растет момент.
Двигатель с последовательным возбуждением надежнее, чем другие двигатели постоянного тока, потому что у него обмотка возбуждения выполнена проводом большего сечения, и обмотка возбуждения имеет ничтожно малое напряжение между витками.
Двигатель со смешанным возбуждением применяется редко, работает в механизмах с циклической нагрузкой. Как правило используется динамическое торможение на остановке, работает с большей частотой включения, при которой требуется принудительное охлаждение воздухом продуваемого через двигатель.
ДПТ НВ:
При рассмотрении механических характеристик двигателя считают, что источник питания или сеть бесконечной мощности, ее внутреннее сопротивление близко к нулю, напряжение сети неизменно Uс=const.
Поэтому цепи возбуждения и якоря не зависят друг от друга. Не зависят эти цепи друг от друга и потому, что во многих системах привода для обмотки возбуждения используется отдельный источник питания.
Схема двигателя постоянного тока с независимым возбуждением следующая:
КО – компенсационная обмотка;
ДП – обмотка дополнительных полюсов;
rпя– дополнительное сопротивление, включенное последовательно с якорем;
rпв– дополнительное сопротивление, включенное последовательно с обмоткой возбуждения.
Uся=Е+Iя(rя+rпя)– для якоря;
Uc=Iов(rов+rпв) –для обмотки возбуждения;
Е=КФw;;
Ф – магнитный поток;
w– угловая скорость;
К – конструкторский коэффициент;
Р – число пар полюсов;
N– число активной проводимости релейной ветви;
а – число параллельных ветвей обмоток якоря.
Uся=КФw+Iя(rя+rпя);
- уравнение для скорости двигателя;
Связь между моментом и током М = КФIя
.
Уравнение характеристики представляет из себя прямую линию, которой отсекают от оси ординат отрезок ,w0– скорость идеального холостого хода.
Из выражения механических и электромеханических характеристик видно, что при Ф=constэлектромеханические и механические характеристики представляют собой прямую линию пересекающую ось координат.
;
Из графических выражений характеристику можно выразить следующим образом:
;
Варьируя величинами Uс, rпя, Ф,можно получить семейство кривых, в этих семействах сложно выделить естественную и искусственную электромеханические и механические характеристики. Под естественной понимают характеристику, когдаUс=Uн, Ф=Фн, rпя=0. Все остальные характеристики искусственные.
studfiles.net
В электрическом двигателе осуществляется связь механического движения привода и механизма с электрическими процессами в системе управления приводом и наоборот, которая объединяет механическую и электрическую часть электропривода в единую электромеханическую систему. Различные проявления этой связи называют электромеханической связью.
Представим уравнения электрического равновесия в следующем виде (после подстановки Lи дифференцирования):
.
Здесь ; второй член уравнения – результирующая ЭДС самоиндукции и взаимной индукции вызванная изменением токов в обмотках в результате вращения ротора.
ЭДС вращения зависит от скорости движения ротора. Изменение этой скорости, вызванное процессами механической части эл.привода, вызывает изменение токов в обмотках. Это явление и представляет собой электромеханическую связь, вследствие которой при питании двигателя от источника напряжения существует зависимость токов силовой цепи электропривода от его скорости. Т.к. токи iiблагодаря этой связи зависят от скорости ротора двигателя, то и его электромагнитный момент М также зависит от скорости. Связь эта характеризуется зависимостями:
или
или
Первые зависимости являются электромеханическими, а вторые – механическими характеристиками двигателя.
Уравнения электрического равновесия, записанные выше для Ui, выражают связь между функциямиив динамических процессах электромеханического преобразования энергии и представляет собой обобщенное математическое описание эл.механических характеристик двигателя во всех режимах работы. Поэтому они являются уравнениями электромеханической характеристики двигателя.
Если эти уравнения дополнить уравнением электромагнитного момента двигателя, то полученная система уравнений является обобщенным математическим описанием механических характеристик двигателя во всех режимах работы. Поэтому они являются уравнениями механической характеристики.
В зависимости от режима работы электромеханические и механические характеристики разделяются на статические и динамические. Статические характеристики соответствуют статическим (установившимся) режимам работы, а динамические – динамическим. Уравнения статических характеристик получаются из общих уравнений динамики (для Uiи М) путем подстановки в них условий, соответствующих статическим режимам.
Графически динамическая механическая характеристика представляет собой геометрическое место точек на плоскости (, М), каждая из которых соответствует определенному моменту времени. Статическая механическая характеристика представляет собой геометрическое место точек на плоскости (, М), соответствующих установившемуся режиму работы. В качестве примера на рис. изображены статическая и динамическая механические характеристики асинхронного двигателя (для режима пуска) в холостую.
При изменении нагрузки на валу двигателя скорость его изменяется. Величиной, характеризующей степень ее изменения, является жесткость механической характеристики.
Статическая жесткость характеристики определяется как отношение приращения момента к приращению скорости, т.е.. Понятием жесткости оценивается форма механической характеристики. Это понятие применимо и для оценки формы механической характеристики производственных механизмов. Графически жесткость определяетсяctgугла наклона между касательной к характеристике и осью моментов, т.е.или
отсчитывается по часовой стрелке. Здесь mиmм– масштабы скорости и момента. Статические характеристики могут иметь положительную и отрицательную жесткость. Если при увеличении нагрузки скорость уменьшается – жесткость характеристики отрицательна и наоборот.
Статические электромеханические и механические характеристики не позволяют судить о электромеханических свойствах двигателя и электропривода в динамических режимах, т.к. жесткая и даже абсолютно жесткая статическая характеристика в в установившемся динамическом режиме работы электропривода превращается в мягкую или имеющую переменную жесткость. Поэтому для суждения о жесткости механической характеристик двигателя или электропривода в динамических режимах используется понятие динамической жесткости. Модуль динамической жесткости определяется как отношение амплитуд установившихся гармонических колебаний момента и угловой скорости относительно средних значений. приg0.
В операторной форме:
Это выражение свидетельствует о том, что gпредставляет собой передаточную функцию ЭМП, если входным параметром принять скорость двигателя(), а выходным – электромагнитный момент М().
Рассмотрим теперь возможные режимы работы ЭМП и ограничения, накладываемые на протекание этих режимов.
Основным режимом работы ЭМП и двигателя является двигательный при котором мощность Рс, потребляемая из сети, в основном преобразуется в механическую Рмех, а остальная частьР теряется в виде тепла в обмотках и стали машины.
К тормозным режимам относятся режимы:
а) рекуперативного торможения;
б) противовключение;
в) динамического торможения.
Все тормозные режимы являются генераторными.
В режиме рекуперативного торможения Рмех, поступающая с вала механизма, преобразуется в электрическую и отдается в сеть за исключением потерьР в стали и обмотках.
Врежиме противовключения электромагнитный момент двигателя действует против направления вращения ротора (якоря) двигателя. При Этом двигатель потребляет мощность Рс из сети и с вала механизма Рмехи вся она теряется в виде тепла в сопротивлениях двигателя и стали.
Врежиме динамического торможения двигатель отключен от сети и работает автономным генератором. Вся механическая мощность Рмех, поступающая с вала механизма, преобразуется в электрическую и рассеивается в виде тепла в обмотках и стали машины.
Процессы электромеханического преобразования энергии сопровождаются потерями энергии, вызывающими нагрев машины, повышение температуры нагрева. Максимально допустимая tнагрева двигателя ограничивается теплостойкостью изоляции его обмоток, т.к. превышение допустимойtрезко сокращает срок службы изоляции. Поэтому одно из ограничений, накладываемых на процесс электромеханического преобразования энергии – ограничение по нагреву. Нагрузка двигателя по току, мощности, моменту не должна превышать значений, при которых рабочаяtдвигателя может превышать допустимуюt. Допустимая по нагреву нагрузка двигателя называется номинальной и указывается в паспортных и каталожных данных. К числу номинальных данных относятся:PH,IH,UH,fH,H,H,cosH.
Ограничения по нагреву не исключают возможности кратковременной перегрузки двигателя, т.е. превышения номинальной нагрузки, т.к. за время кратковременной перегрузки tдвигателя заметно измениться не может.
Различают перегрузочную способность двигателя по току Iи по моментуМ:
: , где
Мдоп,Iдоп, Мн,Iн– максимально допустимые и, соответственно, номинальные момент и ток.
Перегрузочная способность двигателей постоянного тока ограничивается условиями коммутации с т.з. допустимой степени искрения и скорости изменения тока якоря . Перегрузочная способность двигателей переменного тока ограничивается наибольшим моментом, который машина способна развить при номинальном напряжении, номинальной частоте и номинальном возбуждении (для синхронных машин).
Перегрузочная способность двигателей постоянного тока общего назначения по моменту не должна быть меньше 2,5. Для крановых и металлургических двигателей постоянного тока в зависимости от способа возбуждения и мощности Мнаходится в пределах 2,55,5.
Перегрузочная способность двигателей постоянного тока по току составляет 1,53,6, а для двигателей с гладким якорем 68.
Перегрузочная способность асинхронных двигателей при UHиfHограничивается величиной критического момента. Для к.з. двигателей общепромышленного примененияМ=1,72,2, для двигателей с фазным роторомМ=1,74, а для крановых и металлургических двигателей более 2,3 и дается в справочниках и каталогах. Учитывая возможное понижения напряжения сети до 0,9UН, при расчетах следует братьМ=0,8М.
Мгновенная перегрузочная способность синхронных двигателей по моменту обычно равна М=2,53, а за счет форсировки возбуждения может быть доведена доМ=3,54.
Электромеханические свойства двигателей.
Математическое описание процессов преобразования энергии в двигателе постоянного тока независимого возбуждения.
Известно, что у двигателя постоянного тока независимого возбуждения (ДНВ) обмотка возбуждения питается от независимого источника постоянного тока. Принципиальная схема этого двигателя изображена на рис.
С т.з. внутренних процессов двигатели постоянного тока независимо от способа возбуждения являются машинами переменного тока, т.к. по обмоткам их якорей течет переменный ток. Это обеспечивается работой коллектора, который коммутирует постоянных ток, идущий из сети с частотой эл, равной электрической скорости якоря. Поэтому уравнения, описывающие процесс преобразования энергии в ДНВ, являются частным случаем обобщенного математического описания процессов электромеханического преобразования, полученного ранее.
Модели ДНВ соответствует включение обмоток двухфазной обобщенной машины по приведенной ниже схеме. Здесь обмотка статора по оси включена на постоянное напряжениеUВ, а обмотка по осине используется. Обмотки фаз 2dи 2qротора питаются переменными токамиi2dиi2qот преобразователя частоты ПЧ, осуществляющего коммутацию этих токов(преобразование из постоянного) в функции угла от поворота ротораэлс частотойэл.
Обмотки ротора с переменными токами создают вращающееся магнитное поле, которое вращается со скоростьюэлв направлении, противоположном направлению вращения ротора. Поскольку в качестве ПЧ в машинах постоянного тока используется механический коллектор, то изображенная схема представляет модель двигателя постоянного тока. Если в качестве ПЧ используется тиристорный преобразователь частоты (ТПЧ), коммутируемый датчиком положения ротора, то это же схема является схемой модели вентильного двигателя, выполняемого на базе синхронной машины.
В рассматриваемой модели МДС статора создается постоянным током возбуждения iв=i1, поэтому она ориентированна по осии неподвижна в пространстве. Соответственно и МДС ротора при вращении со скоростьюэлдолжна быть неподвижна относительно неподвижного статора. Это возможно только при условии, что МДС ротора (поле ротора) вращается относительно ротора в противоположном направлении со скоростью -эл. Для этого нужно, чтобы обмотки фаз ротора обтекались переменными токамиi2dиi2q, изменяющиеся с частотойэлпо закону:
.
Т.к. поле ротора неподвижно относительно статора, для математического описания процессов преобразования энергии целесообразно сделать преобразование переменных машины к осям ,для случаяк=0. С этой целью используем формулы прямого преобразования, учитывая что.
.
Преобразованные к осям ,значения токовi2dиi2dполучим, подставив сюда выраженияi2dиi2d:
Это значит, что в осях ,действительным переменным токам обмоток ротора эквивалентна одна якорная обмотка, расположенная по оси, обтекаемая постоянным токомiя, которая создает магнитное поле, неподвижное в пространстве и направленное по оси, совпадающей с осью щеток двигателя. По осиобмотки ротора нет, о чем говорит то, что ток в такой обмотке равен 0.
В реальной машине по оси щеток направлены также МДС добавочных полюсов и компенсационной обмотки (при Р>100кВт). Поэтому схема модели двигателя в осях ,с учетом сказанного имеет вид, изображенный на рис.
Для получения уравнений динамической характеристики ДНВ воспользуемся преобразованными уравнения обобщенной машины в осях ,.
В соответствие с изображенной схемой модели ДНВ, можно принять:
Имея это в виду и обобщенную 2-х фазную модель ДНВ, выразим потокосцепления через соответствующие токи.
Здесь Lя- суммарная индуктивность обмотки якоря, ДП и КО.
С учетом всего этого написанные выше преобразованные уравнения будут иметь вид:
Последний член 2-го из этих уравнений – это ЭДС двигателя:
Момент двигателя:
Здесь в системе СИ.
Таким образом окончательно можно записать:
Здесь Тв, Тя– соответственно электромагнитные постоянные цепи возбуждения и цепи якоря. Обмотки ДП и КО являются вспомогательными. Поэтому в дальнейшим на схеме двигателя из изображать не будем, а их сопротивления и индуктивности учитываются вRяиLя.
studfiles.net
Двигатель смешанного возбуждения, принципиальная схема которого изображена на рис. 3.9.1, имеет две обмотки возбуждения – параллельную (независимую) и последовательную. Поэтому его свойства и характеристики занимают промежуточное положение между ДНВ и ДПВ. Практически МДС обмоток возбуждения действуют согласованно.
Естественные электромеханические характеристики ДСВ приводятся в каталогах. Благодаря наличию параллельной обмотки возбуждения ДСВ имеет скорость идеального холостого хода. При малых нагрузках, когда машина еще не насыщена, поток возрастает от прибавления к постоянному потоку параллельной обмотки потока последовательной обмотки возбуждения и скорость резко снижается (см. график на рис. 3.9.2). При больших нагрузках машина насыщается и хотя МДС последовательной обмотки растет, поток машины почти не меняется. Поэтому скорость снижается незначительно лишь за счет падения напряжения в цепи якоря. Чем больше МДС последовательной обмотки, т.е. чем больше нагрузка, тем мягче характеристики (пунктирные кривые на рис. 3.9.2)
При изменении подводимого напряжения характеристики перемещаются параллельно самим себе.
ДСВ позволяет иметь все три способа электрического торможения. Они имеют несколько особенностей по сравнению с тормозными режимами ДНВ и ДПВ. При ω>ω0 двигатель переходит в режим с рекуперацией энергии в сеть. Ток в якоре и последовательной обмотке при этом меняет направление и может размагнитить машину. С увеличением тока тормозной момент нарастает очень медленно, а при больших токах может даже уменьшаться. Наибольший тормозной момент составляет (0,3÷0,7)МН и имеет место при ω=2ω0.
Характеристики при этом во II квадранте, идут круто вверх (см. рис.3.9.3). Во избежание размагничивающего действия последовательной обмотки при переходе в данный тормозной режим ее шунтируют (отключают), превращая этим самым, двигатель в генератор независимого возбуждения. Поэтому механические характеристики во II квадранте превращаются в прямые (пунктир).
Режим противовключения практически не отличается от этого режима ДПВ.
Для перевода ДСВ в режима динамического торможения якорная цепь отключается от сети и замыкается на тормозное сопротивление. Поскольку ток в последовательной обмотке при этом изменит направление, машина будет размагничиваться. Поэтому обычно эту обмотку возбуждения отключают и торможение осуществляется только при обмотке параллельного возбуждения. Механические характеристики при этом имеют вид штриховых прямых, как показано на рис. 3.9.4.
Величина тормозного сопротивления для ступени противовключения двигателя последовательного возбуждения, которое нужно ввести в цепь якоря для осуществления тормозного спуска груза, может быть определена из выражения допустимого тока якоря, который протекает по якорю в этом режиме.
, откуда
, где ; RП – пусковое сопротивление.
Ступень противовключения соединяется последовательно с пусковым сопротивлением (см. схему ри. 3.10.1).
Величина Емакс, соответствующая Iдоп и максимально возможной скорости ωмакс, определяется из выражения:
Величина ωМАКС определяется из условий двигательного режима, предшествующего противовключению, по минимальной величине МС, а величина ωе – из естественной характеристики по Iдоп.
Тормозное сопротивление для режима динамического торможения ДПВ с независимым возбуждением рассчитывается так же из условий ограничения броска тока в начальный момент торможения до допустимого значения Iдоп. Т.к. в этом режиме он отрицателен, а U=UН=0, то
, где
RЯ – сопротивление обмотки якоря без сопротивления обмотки возбуждения (она включена отдельно на напряжение сети). Подставляя вместо Е-EМАКС, а вместо Iя – допустимый ток Iдоп получим, решив выражение относительно Rm:
.
Емакс определяется исходя из следующего: т.к. при динамическом торможении с независимым возбуждением сопротивление Rдоб подбирается таким, чтобы ток в обмотке возбуждения был номинальный, то Емакс будет во столько раз больше Ен, во сколько ωмакс>ωн. Поэтому
.
Расчет сопротивления ступени противовключения для ДНВ и сопротивления динамического торможения выполняются так же, как и для ДПВ, с той лишь разницей, что максимальная скорость, с которой двигатель переводится в тормозной режим, принимается равной ω0. Поэтому и для нерегулируемых двигателей при противовключении и, соответственно при динамическом торможении:
Для регулируемых двигателей за начальную скорость торможения принимается набольшая скорость в двигательном режиме ωm при наименьшем Мс. Тогда
.
В случае торможения ДНВ с ослабленным потоком, так же как и ДПВ, необходимо учитывать, что до начала торможения двигатель работает с повышенной скоростью ωмакс и ухудшенными условиями коммутации, приводящим к снижению Iдоп. Поэтому в расчетные формулы вместо Iдоп нужно подставлять .
Расчет тормозного сопротивления для режима динамического торможения ДСМ с подпиткой последовательной обмотки возбуждения ничем не отличается от расчета Rm для ДПВ. Если последовательная обмотка при торможении отключается (не принимает участия), в выражение:
подставляется Емакс, определяемая только потоком параллельной обмотки возбуждения, т.к. при вращении включенного в сеть ДСМ со скоростью ω0 его ЭДС=Uсети=UН и через якорь и последовательную обмотку возбуждения ток не проходит. Поэтому , откуда.
При этом ω0 берется из графика естественной характеристики, а ωмакс – из той же характеристики по минимально возможному МС.
Сопротивление, включаемое в цепь якоря ДНВ для получения желаемой скорости, например, тормозного спуска груза в режиме рекуперативного торможения при заданном тормозном токе IЯm=IЯдоп, может быть определенно из уравнения электромеханической характеристики с учетом знака тока (он отрицателен)
,
откуда полное сопротивление якорной цепи:
, где ωm – скорость, которую нужно иметь при тормозном спуске груза.
Тормозное сопротивлении
Можно определить Rm задаваясь не тормозным током, а тормозным моментом Мm. С учетом знака момента
Подставив в это выражение вместо ω скорость, заданную скорость ωm, а вместо M – величину тормозного момента, получим
, .
studfiles.net
Хотя основной областью применения синхронных двигателей является нерегулируемый электропривод, тем не менее при частотном управлении они используются и в регулируемых электроприводах. Принципиальная схема СД изображена на рис. 3.16.1.
Как правило, СД выполняются с явно выраженными полюсами. При работе СД в двигательном режиме его ротор отстает от вращающегося магнитного поля на угол . При номинальной нагрузке этот угол равен электрических градусов.
Уравнения угловой характеристики СД, как известно из курса электрических машин, имеет вид:
, где
ω0 – угловая скорость магнитного поля машин.
x1g и x1d – индуктивные сопротивления по поперечной и продольной оси машины. Угловая характеристика изображена на рис. 3.16.2.
Максимальный момент, определяющий перегрузочную способность двигателя, составляет (2÷3) МН, т.е. СД менее чувствителен к понижению напряжения внешней сети, чем АД, т.к. основной момент М', обусловленный взаимодействием вращающего поля статора с полем ротора ≡U1, а реактивный момент М'', хотя и ≡U12, мало влияет на перегрузочную способность двигателя (2-я составляющая в уравнении угловой характеристики).
Рабочий участок угловой характеристики с достаточной для инженерных задач точностью можно заменить линейной зависимостью
, где
СЭМ коэффициент жесткости упругой электромагнитной связь между полем статора и ротора.
Дифференцируя это выражение, можно получить приближенное уравнение динамической механической характеристики СД.
т.к.
В ранее рассмотренной двухмассовой упругой механической системе, было установлено, что момент упругого взаимодействия .
Дифференцирование этой зависимости дает уравнение, совпадающее по форме с уравнением
Действительно, .
Это подтверждает аналогию между электромагнитными взаимодействиями в СД и механической пружине. Поэтому механическую модель, отражающую особенности синхронного двигателя, можно представить в виде, изображенном на рис. 3.16.3.
Здесь электромагнитная связь между полями статора и ротора СД заменена пружиной с жесткостью СЭМ, а приведенный момент инерции ротора и механизма Iпр, представлен подвешенной на этой пружине массой «m». Очевидно, механический аналог СД представляет собой идеальное колебательное звено, в котором возникающие по тем или иным причинам колебания не затухают.
Действительно, повышенная склонность к колебаниям при изменении нагрузки, является характерной особенностью СД. Для их устраивается или уменьшения СД снабжаются демпферной (успокоительной) к.з. обмоткой, выполняемой в виде беличьей клети на полюсах ротора. При возникновении колебаний (качаний) ротора, т.е. скольжения, она создает асинхронный момент, который, в первом приближении можно считать пропорциональным скольжению. С учетом этого момента результирующий момент СД в динамическом режиме можно представить в виде суммы синхронного и асинхронного моментов.
Т.к. , где– оператор, уравнение механической характеристики СД в операторной форме можно записать в виде
.
Структурная схема, соответствующая этому уравнению, приведена на рис. 3.16.4. В приведенных выражениях β – это модуль жесткости линейной части механической характеристики для асинхронной составляющей момента, обусловленного действием демпферной обмотки.
Из структурной схемы следует, что асинхронный момент, создаваемый демпферной обмоткой, оказывает влияние, аналогичное вязкому трению. Поэтому схема механического аналога СД с учетом наличия демпферной обмотки (рис. 3.16.3) должна быть дополнена механическим демпфером с вязким трением.
При р=0 получим уравнение статической механической характеристики с ω=ω0=const при любых значениях М. Действительно, из выражения
следует, что
при р=0 ω=ω0 статическая механическая характеристика имеет вид прямой (рис. 3.16.5), параллельной оси моментов в пределах перегрузочной способности двигателя, т.к. при нагрузке, превышающей двигатель выпадает из синхронизма.
В динамических режимах, как следует из уравнения момента, механическая характеристика СД не является абсолютно жесткой. В установившемся динамическом режиме вынужденных колебаний изменениям момента с амплитудой Мmax и соответствующим изменениям угла θэл соответствуют определенные амплитуды ωmax колебаний скорости и динамическая характеристика имеет вид эллипса. Её динамическая жесткость определяется соотношением:
studfiles.net
Электромеханическая характеристика двигателей постоянного тока – это графическая зависимость частоты вращения и вращающего момента от тока двигателя, при условии, что напряжение подаваемое на двигатель постоянное.
n = f(Iя),
Мвр = f(Iя).
U = const.
Изменение тока двигателя при снятии таких характеристик осуществляется за счет изменения механической нагрузки на валу якоря.
Характеристики двигателя с параллельным возбуждением (шунтовой).
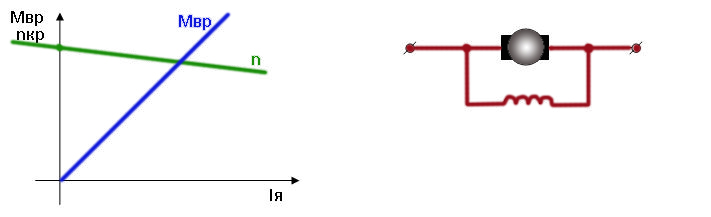 Так как напряжение – величина постоянная, то ток возбуждения Iв и основной магнитный поток Ф у данного двигателя при снятии характеристики изменяться не будут и поэтому вращающий момент Мвр будет прямо пропорционален зависеть от тока якоря. Частота вращения n при изменении механической нагрузки на валу меняется незначительно, только за счет изменения падения напряжения в обмотке якоря. Такая характеристика называется «жесткой» или мало изменяющейся. При частоте вращения nкр ток якоря равен 0, то есть U = Е. Если частота вращения будет больше nкр, то двигатель автоматически перейдет в генераторный режим.
Так как напряжение – величина постоянная, то ток возбуждения Iв и основной магнитный поток Ф у данного двигателя при снятии характеристики изменяться не будут и поэтому вращающий момент Мвр будет прямо пропорционален зависеть от тока якоря. Частота вращения n при изменении механической нагрузки на валу меняется незначительно, только за счет изменения падения напряжения в обмотке якоря. Такая характеристика называется «жесткой» или мало изменяющейся. При частоте вращения nкр ток якоря равен 0, то есть U = Е. Если частота вращения будет больше nкр, то двигатель автоматически перейдет в генераторный режим.
Iя = (U – Е) / Rя, n = (U – IяRя) / СФ, Мвр = СФIя
Характеристики двигателя с последовательным возбуждением (сериестный).
У данного двигателя ток якоря равен току возбуждения, поэтому Мвр данного двигателя зависит от квадрата тока якоря. При увеличении механической нагрузки на валу частота вращения данного двигателя уменьшается значительно по следующим причинам:
ü Из-за увеличения, в основном, магнитного потока полюсов Ф.
ü За счет увеличения падения напряжения в обмотке якоря.
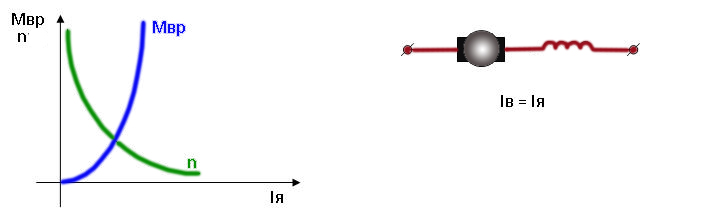 Такая характеристика является «мягкой» и двигатель не может автоматически переходить в генераторный режим, поэтому, при малых механических нагрузках на валу, двигатель идет в разнос – n резко увеличивается. Двигатели с последовательным возбуждением запрещается запускать без механической нагрузке на валу якоря.
Такая характеристика является «мягкой» и двигатель не может автоматически переходить в генераторный режим, поэтому, при малых механических нагрузках на валу, двигатель идет в разнос – n резко увеличивается. Двигатели с последовательным возбуждением запрещается запускать без механической нагрузке на валу якоря.
Сравнение двигателей с различными типами возбуждения для их применения
В качестве тяговых
Вся обмотка якоря состоит из секций. Все секции между собой соединены последовательно, и конец последней секции соединен с началом первой. Секции бывают одновитковые и многовитковые.
В тяговых двигателях секции делают одновитковые, поэтому, будем считать секцию и виток одним и тем же. Активные части укладываются под разноименными полюсами машины.
Типы обмоток якоря
Простая петлевая обмотка. При данном типе обмотки у электрической машины количество параллельных ветвей в обмотке якоря равно количеству полюсов и количеству щеток. Применяется в электрических машинах рассчитанных на относительно большой ток, создают и выдерживают относительно не высокое напряжение.
Простая волновая обмотка. У данной обмотки количество параллельных ветвей всегда равно двум, независимо от количества полюсов. Машины с таким типом обмотки рассчитаны на относительно небольшой ток и высокое напряжение.
 Реакция якоря
Реакция якоря Для характеристики магнитного поля электрической машины существует понятия:
Геометрическая нейтраль – это линия, перпендикулярная оси полюсов и проходящая через середину расстояния между ними.
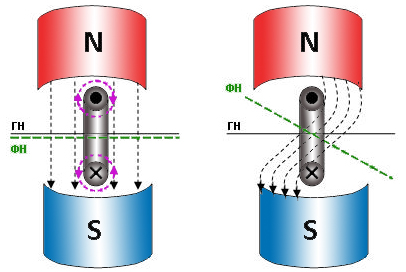 Физическая нейтраль – это линия перпендикулярная основному магнитному потоку и проходящая через середину расстояния между полюсами.
Физическая нейтраль – это линия перпендикулярная основному магнитному потоку и проходящая через середину расстояния между полюсами.
Реакция якоря – это воздействие магнитного поля якоря на основное магнитное поле полюсов машины.
Из-за реакции якоря основное магнитное поле полюсов искажается, то есть, под одним краем полюса магнитное поле усиливается, а под другим краем – ослабляется, соответственно происходит поворот физической нейтрали относительно геометрической.
Вредные последствия реакции якоря
1. Размагничивающее действие – при усилении магнитного поля под одним краем полюса, этот край полюса доходит до магнитного насыщения, поэтому из-за реакции якоря магнитное поле ослабляется в большей степени под одним краем, чем усиливается под другим. Соответственно, основной магнитный поток Ф уменьшится, что приводит и к уменьшению Мвр и Ег.
2. Ухудшение коммутации из-за поворота физической нейтрали относительно геометрической. Коммутируемая секция на геометрической нейтрали пересекает магнитные силовые линии, при вращении якоря, и в секции индуктируется ЭДС вращения, которая способствует увеличению искрения под щетками.
3. Увеличение вероятности возникновения кругового огня по коллектору. При вращении якоря витки проходят через сгущение магнитных силовых линий, поэтому под одним краем полюса индуктируется большая ЭДС, а значит, увеличивается напряжение между двумя соседними коллекторными пластинами, что может привести к пробою воздушной изоляции между пластинами коллектора и как следствие – к круговому огню по коллектору (переброс). Круговой огонь – это мощная электрическая дуга по коллектору, которая замыкает две разноименные щетки между собой.
cyberpedia.su
Важное значение для теории и практики электроприводов имеют электромеханические и механические характеристикидвигателей. Механические характеристики двигателей в сочетании с уравнениями движения электропривода позволяют исследовать движение электромеханических систем в целом. В зависимости от режима работы электромеханические и механические характеристики подразделяются на статические и динамические. Статическая механическая характеристика представляет собой геометрическое место точек на плоскости, соответствующих установившемуся режимам работы, а динамическая характеристика – геометрическое место точек на той же плоскости, каждой из которых соответствует определенный момент времени. В качестве примера на рис. 2.1 изображены статическая и динамическая механические характеристики асинхронного двигателя для режима пуска в холостую.
При изменении нагрузки на валу двигателя скорость его изменяется. Величиной, характеризующей степень ее изменения, является жесткость. Статическая жесткость характеристики определяется как отношение приращения момента к приращению скорости .
Статические характеристики двигателей имеют отрицательную жесткость, если при увеличении нагрузки скорость их уменьшается.
В динамических режимах работы электропривода жесткая и даже абсолютно жесткая статическая характеристика превращается в мягкую или имеющую переменную жесткость как видно из рис. 2.1. Поэтому для правильного суждения о жесткости характеристик двигателя или электропривода в этих режимах используется понятие динамической жесткости. Модуль динамической жесткости определяется как отношение амплитуд установившихся гармонических колебаний момента и угловой скорости относительно средних значений
при g 0.
В заключение рассмотрим возможные режимы работы ЭМП с точки зрения направления потоков энергии и органичениях, накладываемых на протекание этих режимов.
Основным режимом работы ЭМП и двигателя является двигательный, при котором мощность, потребляемая из сети Рс, в основном преобразуется в механическую Рмех, а остальная часть Р теряется в виде тепла в обмотках и стали машины.
К тормозным, т.е. генераторным, относятся режимы:
а) рекуперативное торможение;
б) противовключение;
в) динамическое торможение.
В режиме рекуперативного торможения механическая мощность Рмех, поступающая с вала механизма, преобразуется в электрическую РС и отдается в сеть за исключением потерь в обмотках и стали.
В режиме противовключения двигатель потребляет мощность Рс из сети и с вала механизма Рмех и вся она теряется в виде тепла в обмотках и стали.
В режиме динамического торможения двигатель отключен от сети, работает автономным генератором. Вся механическая мощность, поступающая с вала механизма, преобразуется в электрическую и рассеивается в виде тепла в обмотках и стали машины.
Процесс электромеханического преобразования энергии сопровождаются потерями энергии, вызывающими нагрев машины. Чем больше ее нагрузка, тем больше тепла выделяется в машине, тем выше температура ее элементов. Максимально допустимая t двигателя ограничивается максимально допустимым нагревом изоляции, т.к. превышение допустимой t резко сокращает срок службы изоляции. Отсюда вытекает ограничение по нагреву. Однако ограничение по нагреву не исключает возможность кратковременной перенагрузки двигателя, т.к. за время такой нагрузки t двигателя заметно измениться не сможет.
Различают, также перегрузочную способность двигателя по току и по моменту.
Перегрузочная способность двигателей постоянного тока ограничивается условиями коммутации, а двигателей переменного тока – наибольшим моментом, который машина способа развить при номинальном напряжении и номинальном возбуждении (для синхронных двигателей).
Перегрузочная способность двигателей постоянного тока по моменту м не должна быть меньше 2,5. Для крановых и металлургических двигателей постоянного тока в зависимости от мощности и способа возбуждения составляет м=2,55,5.
Перегрузочная способность двигателей постоянного тока по току составляет I=1,53,6, а для двигателей с гладким якорем I=68.
Перегрузочная способность асинхронных двигателей (АД) длительного режима по моменту М=1,72,2, а для крановых и металлургических двигателей она более 2,3. Перегрузочная способность АД и синхронных двигателей по току не нормируется.
Перегрузочная способность синхронных двигателей (мгновенная) по моменту М=2,53, а за счет форсировки возбуждения может быть доведена до 3,54.
studfiles.net
Cтраница 1
Электромеханические характеристики двигателя подобраны таким образом, что при подходе ползунка К к положению, соответствующему полной компенсации, скорость ротора двигателя уменьшается, а в момент устранения дебаланса ротор двигателя затормаживается. [1]
Электромеханическая характеристика двигателя приведена на рис. 3 - 70 сплошной линией. [3]
Электромеханические характеристики ком-паундного двигателя обычно приводятся в виде семейства кривых для ряда значений тока шунтовой обмотки. [4]
Электромеханические характеристики двигателя вентилятора НБ-430 ( рис. VII.3) то отличаются большой мягкостью, которую достигают применением сравнительно большого воздушного зазора под главными полюсами и малого насыщения магнитной системы. [5]
Реальная электромеханическая характеристика двигателя последовательного возбуждения несколько отличается от идеализированной. Поэтому реальная скоростная характеристика / на рис. 2.15 в области токов / я0 5 / ном близка к идеализированной, поскольку здесь почти не нарушается линейная связь между потоком и током возбуждения. [6]
Получаемые искусственные электромеханические характеристики двигателя повторяют реостатные характеристики ( см. рис. 55.27, а), что позволяет использовать их для ограничения его тока в переходных режимах. [8]
Это обеспечивает однозначность электромеханических характеристик двигателя в зоне прерывистых токов. [9]
В заключение об электромеханических характеристиках двигателей постоянного или выпрямленного тока следует заметить, что все графически представленные зависимости ( п, Ф, М) были установлены в предположении постоянства величины питающего напряжения. При работе же на линии напряжение контактного провода при нагрузке изменяется, так же как и в преобразователях электроподвижного состава однофазного тока. Учет этих обстоятельств проводится при построении характеристик самих электровозов или электропоездов. [10]
На рис. 2 - 3 показаны электромеханические характеристики двигателя ( возбуждение последнего постоянно) в функции тока нагрузки. [12]
На рис. 229, а показаны электромеханические характеристики двигателя с последовательным возбуждением, а на рис. 229, б - его механическая характеристика. [14]
Механические ( см. рис. 9.33) и электромеханические характеристики двигателя в режиме противовключения подчиняются уравнениям (9.23) и (9.24), являются продолжением характеристик двигательного режима и располагаются в IV квадранте. [15]
Страницы: 1 2 3
www.ngpedia.ru










