Электропривод – электромеханическая система, служащая для привода в движение функциональных органов машин и агрегатов для выполнения определенного технологического процесса. Электрические приводы состоят из электродвигателя, устройства преобразования, управления и передачи.
С прогрессом промышленного производства электрические приводы заняли в быту и на производстве лидирующую позицию по числу электродвигателей и общей мощности. Рассмотрим структуру, типы, классификацию электроприводов, и предъявляемые к нему требования.

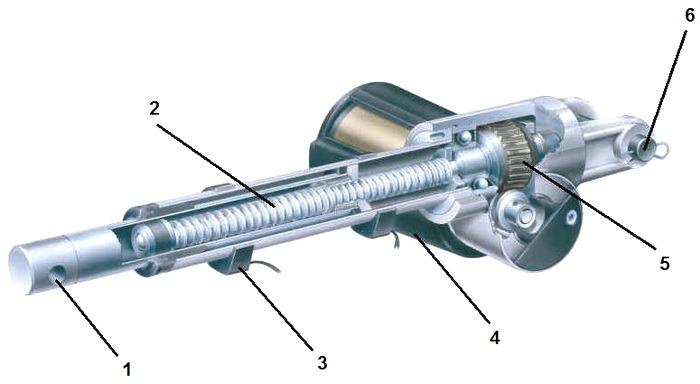
1 — Передний крепеж2 — Винтовая передача3 — Концевой датчик4 — Электродвигатель5 — Зубчатая передача6 — Задний крепеж

• Р – регулятор служит для управления электроприводом.• ЭП – электрический преобразователь служит для преобразования электроэнергии в регулируемую величину напряжения.• ЭМП – электромеханический преобразователь электричества в механическую энергию.• МП – механический преобразователь способен изменять быстродействие и характер движения двигателя.• Упр – управляющее действие.• ИО – исполнительный орган.
• Электропривод.• Механическая часть.• Система управления.
Исполнительный механизм является устройством, которое смещает рабочую деталь по поступающему сигналу от управляющего механизма. Рабочими деталями могут быть шиберы, клапаны, задвижки, заслонки. Они изменяют количество поступающего вещества на объект.
Рабочие органы могут двигаться поступательно, вращательно в определенных пределах. С их участием производится воздействие на объект. Чаще всего электропривод с исполнительным механизмом состоят из электропривода, редуктора, датчиков положения и узла обратной связи.
Сегодня электрические приводы модернизируются по их снижению веса, эффективности действия, экономичности, долговечности и надежности.
• Статические. Механическая и электромеханическая характеристика.• Механические. Это зависимость скорости вращения от момента сопротивления. При анализе динамических режимов механические характеристики полезны и удобны.• Электромеханические. Это зависимость скорости вращения от тока.• Динамические. Это зависимость координат электропривода в определенный момент времени при переходном режиме.
Электроприводы обычно классифицируются по различным параметрам и свойствам, присущим им. Рассмотрим основные из них.
• Групповой. От одного мотора через трансмиссию приводятся в движение другие исполнительные органы рабочих машин. В таком приводе очень сложное устройство кинематической цепи. Электрические приводы такого вида являются неэкономичными из-за их сложной эксплуатации и автоматизации. Поэтому такой привод сегодня не нашел широкого применения.• Индивидуальный. Он характерен наличием у каждого исполнительного органа отдельного электродвигателя. Такой привод является одним из основных на сегодняшний день, так как кинематическая передача имеет простое устройство, улучшены условия техобслуживания и автоматизации. Индивидуальный привод нашел популярность в современных механизмах: сложных станках, роботах-манипуляторах, подъемных машинах.• Взаимосвязанный. Такой привод имеет несколько связанных электроприводов. При их функционировании поддерживается соотношение скоростей и нагрузок, а также положение органов машин. Взаимосвязанные электрические приводы необходимы по соображениям технологии и устройству. Для примера можно назвать привод ленточного конвейера, механизма поворота экскаватора, или шестерни винтового пресса большой мощности. Для постоянного соотношения скоростей без механической связи применяется схема электрической связи нескольких двигателей. Такая схема получила название схемы электрического вала. Такой привод используется в сложных станках, устройствах разводных мостов.
Чтобы приводы производили качественную работу, необходимо правильно выбрать электрический двигатель. Это создаст условия долгой и надежной работы, а также повысит эффективность производства.
• По требованиям технологического процесса выбирают двигатель с соответствующими характеристиками, конструктивного исполнения, а также метода фиксации и монтажа.• По соображениям экономии подбирают надежный, экономичный и простой двигатель, который не нуждается в больших расходах на эксплуатацию, имеет малый вес, низкую цену и небольшие размеры.• По условиям внешней среды и безопасности подбирают соответствующее исполнение мотора.
Правильный подбор электродвигателя обуславливает технико-экономические свойства всего привода, его надежность и длительный срок работы.
Инновационные электроприводы все автоматизированы. Системы управления приводом дают возможность рационального построения технологических процессов, увеличить производительность и эффективность труда, оптимизировать качество продукции и уменьшить ее цену.
К любым техническим механизмам и агрегатам предъявляются определенные требования технического плана. Не стали исключением и электроприводы. Рассмотрим основные предъявляемые к ним требования.
В соответствии с этим требованием привод должен исполнять определенные функции и заданных условиях в течение некоторого интервала времени, с расчетной вероятностью работы без возникновения неисправностей.
При невыполнении этих требований остальные свойства оказываются бесполезными. Надежность может значительно отличаться в зависимости от характера работы. В некоторых механизмах не требуется долгого времени работы, однако отказ механизма не должен иметь место. Такой пример можно найти в военной промышленности. И другой пример, где наоборот, время службы должно быть большим, а отказ устройства вполне возможен, и не приведет к серьезным последствиям.
Это требование связано с отличием показателей от заданных. Они не могут превышать допустимые величины. Электроприводы должны обеспечивать перемещение рабочего элемента на определенный угол или за некоторое время, а также поддерживать на определенном уровне скорость, ускорение или момент вращения.
Это качество привода обеспечивает быструю реакцию на разные воздействия управления. Быстродействие связано с точностью.
Такая характеристика обеспечивает качество процессов перехода, исполнение определенных закономерностей их выполнения. Качественные требования создаются вследствие особенностей работы машин с электроприводами.
Любые производственные процессы преобразования и передачи имеют потери энергии. Наиболее важным это качество стало в применении электроприводов механизмов, приводах значительной мощности, долгим режимом эксплуатации. Эффективность использования энергии определяется КПД.
Приводы должны совмещаться с работой аппаратуры, в которой они применяются, с их системой снабжения электроэнергией, информационными данными, а также с рабочими элементами. Наиболее остро стоит требование совместимости электроприводов для медицинской и бытовой техники, в радиотехнике.
Похожие темы:
electrosam.ru
Приводы постоянного тока служат для управления двигателями постоянного тока. Правда не везде, а лишь там, где требуется плавное и точное регулирование скорости и вращающего момента электромотора в достаточно широких пределах.
Где же конкретно могут использоваться приводы постоянного тока? Для того, чтобы ответить на данный вопрос, нам надо вначале сказать несколько слов о принципе работы двигателя постоянного тока.
Вообще надо заметить, что электродвигатели - очень распространенный объект управления в различных устройствах и технических системах. Причем настолько, что без них вся наша современная жизнь очевидно вовсе не была бы такой уж и современной. Точнее мы бы так и не ушли далее технологий начала 19 века. И не имели бы не только компьютеров, с их гаджетами, но и вообще не знали бы, например, даже столь привычного нам электрического освещения, поскольку сами электрогенераторы – это, по сути, те же самые электродвигатели, но только преобразующие различные виды неэлектрической энергии (механическая, химическая или тепловая) в электрическую энергию.
Сами электродвигатели при этом, как известно, делятся на электродвигатели постоянного тока и электродвигатели переменного тока. Причем сегодня в силу бурного развития научно-технической мысли, которая предлагает более совершенные алгоритмы векторного управления и довольно дешевые и удобные в использовании частотники, именно последние приобретают все большую популярность в промышленности.
Однако, нельзя не сказать, что и двигатели постоянного тока рано еще списывать со счетов. Они имеют свои весьма важные и существенные преимущества. Дело в том, что один из «глобальных» минусов двигателя постоянного тока – это коллектор, его низкая механическая прочность, а также слабая механическая прочность щеток.
Но зато у двигателя постоянного тока можно менять скорости в достаточно широком диапазоне при относительном постоянстве момента на валу. При этом количество оборотов двигателя постоянного тока пропорционально величине напряжения, которое подается на якорную обмотку. А это значит, что в диапазоне скоростей от нуля до номинального значения электродвигатель может развивать полный крутящий момент. Именно поэтому двигатель постоянного тока широко используют в тех случаях, когда необходимо обеспечить большой момент при низких скоростях электродвигателя почти до его остановки при наличии полной нагрузки с последующим стартом. К таковым областям относятся электроприводы лифтов, кранов, ленточных конвейеров, смесителей, экструдеров и топу подобных механизмов.
Принцип действия двигателя постоянного тока
Вообще надо заметить, что самой первой из всех изобретенных в XIX веке вращающихся электромашин был именно электродвигатель постоянного тока. Сам принцип действия его известен с середины прошлого столетия и основан на том, что крутящий момент здесь создаётся путём взаимодействия между двумя магнитными полями - полем обмотки возбуждения и полем, создающимся обмотками во вращающемся якоре.
Впрочем, в некоторых моделях двигателей постоянного тока нет обмотки возбуждения, вместо нее установлены постоянные магниты, сохраняющее стационарное магнитное поле при любых рабочих условиях.
Принцип работы двигателя постоянного тока заключается в том, что ток, проходя через якорь, создаёт магнитное поле, которое пытается выровняться со стационарным полем. Происходит вращение двигателя/

При этом коллектор (так называется набор сегментированных медных планок), разрывает электрический контакт с уже «выровненной» обмоткой и возбуждает другую обмотку (или как в простом примере, показанном выше, перевозбуждает ту же цепь в противоположном направлении), создавая другое не выровненное магнитное поле, которое продолжает вращать якорь. Электрический контакт между вращающимися сегментами коллектора и стационарным источником питания в этом случае происходит через угольные щетки. Поскольку здесь постоянно имеет место механическое трение, то эти щетки изнашиваются через определенное время (как и сам коллектор) и соответственно требуют своей периодической замены.
Впрочем, следует заметить, что большинство промышленных электродвигателей постоянного тока изготавливаются с несколькими обмотками якоря, а не с одной, как показано на упрощенной иллюстрации сверху.
В электродвигателях постоянного тока проявляются следующие отношения между механическими и электрическими величинами:
Последнее же означает, что, меняя тока обмотки, можно изменять соотношение между скоростью и моментом. Однако этого недостаточно для управления общей мощностью двигателя. Чтобы управлять выходной мощностью электродвигателя постоянного тока также необходимо управлять напряжением и током якоря. Для этой цели можно было бы использовать переменные резисторы, но этот метод не используется в настоящее время, так как приводит к потере мощности. Лучшим решением здесь будет применение электронной схемы регулирования мощности на транзисторных ключах быстро отключающих и включающих якорь двигателя в цепь. Такой тип управления называется широтно-импульсной модуляцией, или ШИМ.

По традиционной технологии для импульсного питания двигателя постоянного тока используют схему управляемого выпрямителя, в котором для преобразования переменного тока в постоянный вместо обычных выпрямляющих диодов используют тиристоры (управляемая схема Ларионова). Основным источником питания промышленных двигателей постоянного тока остается переменный ток, и этот переменный ток должен быть преобразован в постоянный в некотором узле системы; управление имеет смысл интегрировать прямо в этот выпрямительный узел.

Схема управляемого выпрямителя работает по принципу изменения времени «пускового» импульса относительно импульсов колебаний переменного тока. Чем раньше в каждом периоде переменного тока откроется тиристор, тем дольше он будет пропускать ток к двигателю. Схема фазового управления отвечает за генерацию импульсов и их длительность.
Отсюда следует, что привод постоянного тока просто регулирующий подводимую мощность к двигателю был бы трудно регулируемым и не применим в большинстве задач. Для управления двигателем необходимо управлять скоростью. Поэтому на двигателях постоянного тока устанавливают тахогенераторы, механически соединённые с валом двигателя.
Тахогенератор представляет собой небольшой генератор, создающий постоянное напряжение, прямо пропорциональное скорости вращения вала, обычно с выходом 0-10В постоянного тока, реже 0-220В переменного тока. По его показаниям регулируемый привод постоянного тока регулирует электрическую мощность, подводимую к двигателю так, чтобы скорость вращения совпала с заданной управляющим сигналом. Имея датчик обратной связи для регулирования скорости, привод постоянного тока точно регулирует скорость вращения двигателем.

Следует заметить, что в силу длительного периода широкого применения двигателей постоянного тока, на протяжении довольно долгого времени для регулировки скорости вала двигателя использовались приводы постоянного тока. Тем самым, данные приводы имели широкое распространение и были установлены на огромном количестве различных машин, механизмов и оборудовании. Но вот в чем проблема – дело в том, что раньше приводы постоянного тока выпускались с управлением на аналоговых микросхемах. А это вело к длительной настройке оборудования, необходимости постоянного обслуживания привода и частой его перенастройки. В результате против двигателей постоянного тока и соответственно приводов постоянного тока сложилось предубеждение о ненужности и даже вредности установки таких систем. Повсеместно обозначилась тенденция к замене «постоянников» на «переменники». И где-то это и правда оказалось оправдано, но…
Увы, но часто «дьявол кроется в деталях»!
Следует заметить, что сейчас приводы постоянного тока выпускаются с фазными схемами управления, основанными на современных микропроцессорах. А это значит, что они стали значительно более надежны и, ГЛАВНОЕ, не нуждаются в необходимости постоянного обслуживания привода и частой перенастройки приводов. А поскольку вопреки публикациям в СМИ и доводам производителей приводов переменного тока, существует еще немало таких применений, где приводы постоянного тока являются предпочтительными по своему функционалу (а в конечном счете и по деньгам), то возможно при модернизации оборудования следует обратить внимание на приводы постоянного тока.
Более того, сегодня необходимо учитывать, что очень часто, при модернизации систем управления, простая замена устаревших приводов постоянного тока новыми современными приводами постоянного тока, является экономически более выгодной!
Подумайте! Возможно это Ваш случай? Причем в данном случае имеет смысл обратить именно на лидеров по производству приводов постоянного тока, одним из которых является фирма Siemens, выпускающая приводы постоянного тока серии SINAMICS DCM - современный мощный привод постоянного тока со многими дополнительными модулями расширения, интеграции в промышленные сети и встроенными функциями для решения типовых технологических задач (намотка-размотка и т. д.).
sinamics-dcm.ru
 Приставной электропривод Nikon MD12 для «компактного» семейства камер Nikon FM/FE/FA. На верхней крышке корпуса расположены контакты (слева), винт крепления к штативному гнезду фотоаппарата и полумуфта соединения с механизмом взвода. На ручке сверху находится кнопка электроспуска с кольцевым селектором режима протяжки Single/Continuous
Приставной электропривод Nikon MD12 для «компактного» семейства камер Nikon FM/FE/FA. На верхней крышке корпуса расположены контакты (слева), винт крепления к штативному гнезду фотоаппарата и полумуфта соединения с механизмом взвода. На ручке сверху находится кнопка электроспуска с кольцевым селектором режима протяжки Single/Continuous Мото́рный при́вод, реже Ва́йндер — механизм, предназначенный для автоматического взвода затвора фотоаппарата и перемещения фотоплёнки на следующий кадр. Такое устройство повышает оперативность съёмки по сравнению с ручным взводом и даёт возможность непрерывной съёмки серии кадров[1]. Первые моторные приводы были приставными и выполнялись как отдельное устройство, закрепляемое снизу фотоаппарата при помощи штативной гайки, и соединявшееся с ним через механическую муфту[* 1]. Моторные приводы выпускались, главным образом для малоформатных фотоаппаратов, получивших в середине XX века наибольшее распространение в профессиональной фотожурналистике, однако отдельные модели разрабатывались и для среднеформатных камер.
 Фотоаппарат «Robot»с пружинным приводом. 1934 год
Фотоаппарат «Robot»с пружинным приводом. 1934 год  Фотоаппарат «Pentax LX» с электроприводом и кассетой на 250 кадров
Фотоаппарат «Pentax LX» с электроприводом и кассетой на 250 кадров  Фотоаппараты «Leica R4» (слева) и «Leicaflex SL2 Mot» с электроприводами
Фотоаппараты «Leica R4» (слева) и «Leicaflex SL2 Mot» с электроприводами 
 Среднеформатная камера Pentax 645 со встроенным электроприводом
Среднеформатная камера Pentax 645 со встроенным электроприводом Устройства, пригодные для серийной фотосъёмки появились в период развития хронофотографии. Первым из таких приспособлений можно считать установку из 12 кабин с фотоаппаратами для съёмки бегущей лошади, созданную Эдвардом Мэйбриджем в 1874 году[2]. В компактном виде подобная технология впервые реализована Этьеном-Жюлем Марэ, создавшим в 1882 году фоторужьё, снимающее до 10 кадров в секунду на вращающуюся фотопластинку[3]. Дальнейшее развитие хронофотографии привело к созданию кинематографа, но совершенствование фоторепортажа и спортивной фотографии заставляло разработчиков обычных фотоаппаратов задумываться о повышении оперативности съёмки. Такие возможности появились с распространением рулонных фотоматериалов, и особенно 35-мм киноплёнки, ставшей основой для целого класса малоформатной аппаратуры.
Первые приводы для автоматической протяжки плёнки были механическими и работали от заводной пружины. Приставные пружинные вайндеры «Leica MOOLY» начали выпускать для малоформатных фотоаппаратов «Leica III» ещё до начала Второй мировой войны[4]. В 1936 году для этой камеры появился даже вайндер «Leica OOFRC» с дистанционным спуском[5]. Наибольшую известность из-за приспособленности к серийной и автоматической съёмке получили фотоаппараты серии «Robot» с квадратным кадром 24×24 мм на 35-мм киноплёнке. В 1934 году в Германии начат выпуск первой модели «Robot 1» со встроенным пружинным приводом, протягивавшим плёнку со скоростью до 4 кадров в секунду[6]. Фотоаппараты с пружинным приводом оказались хорошо приспособлены для скрытной съёмки, и быстро были приняты на вооружение спецслужбами. В СССР в 1948 году конструкторской лабораторией КГБ разработан полуформатный спецфотоаппарат «Аякс-8» с таким же приводом[7]. По аналогичному принципу построен и «гражданский» дальномерный фотоаппарат «Ленинград» с малоформатным кадром. Любительские шкальные камеры «ЛОМО-135ВС» и «ЛОМО-135М» оснащались такими же приводами, протягивавшими до 10 кадров от одного завода[8]. В 1958 году самым энергоёмким пружинным приводом обладал немецкий фотоаппарат «Robot Star 50», протягивавший от одного завода 50 кадров квадратного формата[9].
Однако, широкое распространение автоматической протяжки началось после появления достаточно компактных источников питания для электродвигателя. Впервые приставной электропривод был использован с фотоаппаратом «Leica 250», выпускавшимся для Люфтваффе. Подключение привода к бортовой электросети самолёта позволяло лётчикам вести фоторазведку, не отвлекаясь от управления самолётом[4]. Большинство аэрофотоаппаратов начали оснащать электроприводом ещё до войны, освободив экипаж от необходимости ручного взвода. Гражданское применение электроприводы получили в 1957 году на дальномерном фотоаппарате «Nikon SP»[10][11]. Первые устройства такого типа оснащались внешним блоком питания из-за громоздкости батарей, пригодных для скоростной протяжки плёнки. Сами приводы выполнялись съёмными из-за большого веса и шумности. Кроме того, в те годы почти все фотоаппараты были механическими и сохраняли возможность ручного взвода затвора курком при работе без мотора и электропитания. Это давало возможность отключать мотор в ситуациях, когда его шум недопустим. Благодаря наличию электромагнитного спуска в большинстве моторных приводов, их применение позволяло дистанционно запускать съёмку по проводам или радиопередатчику без ограничения количества снятых кадров[12].
С миниатюризацией электродвигателей и источников питания связано появление любительской разновидности электропривода — вайндера[* 2]. Этот тип привода отличался отсутствием электроспуска и, как следствие — невозможностью серийной съёмки и дистанционного управления. Вайндеры обеспечивали сравнительно невысокую скорость 1,5—2 кадра в секунду в покадровом режиме против серийной съёмки моторов с частотой 3—6 кадров в секунду. Фотограф мог в зависимости от задачи и возможностей использовать лёгкий вайндер или дорогой скоростной мотор, выпускавшиеся для одного и того же типа фотоаппарата. Некоторые системные камеры могли оснащаться 3—5 различными типами разработанных специально для этой модели вайндеров и моторов. Универсальных стандартов крепления моторных приводов не существовало. Приставные моторы и вайндеры выпускались для конкретных моделей или линеек фотоаппаратов и были редко взаимозаменяемы из-за несовпадения размеров и механических характеристик. Одно из редких исключений — моторный привод Nikon MD-12, пригодный для целой линейки камер Nikon: FM, FE, FA, FM2, FE2, а также FM3A[13]. Максимальная скорость протяжки при серийной съёмке у профессиональных моторов могла достигать 5—6 кадров в секунду. Первыми сверхскоростными фотоаппаратами в 1972 году стали Nikon F High Speed снимавший до 7 кадров в секунду с модифицированным мотором F36[14], и Canon F-1 High Speed с неподвижным полупрозрачным зеркалом и максимальной частотой 9 кадров в секунду[15][16]. Спустя 12 лет рекордная скорость съёмки до 14 кадров в секунду была достигнута в фотоаппарате Canon New F-1 High Speed также с неподвижным зеркалом[17].
В конце 1970-х годов появилась тенденция отказа от приставных моторов в любительских камерах и камерах среднего класса[* 3]. Привод начали встраивать непосредственно в фотоаппарат, одновременно убрав курок ручного взвода. Это упрощало и удешевляло механику камеры, сделав автовзвод доступным даже в «мыльницах». Такие фотоаппараты могли работать только от встроенного мотора, лишившись возможности взвода затвора без батарей. До конца 1980-х большинство профессиональных фотоаппаратов выпускались с приставными моторами, сохраняя механизм ручного взвода и возможность работы без электропитания. Однако, уже в 1988 году в профессиональной модели F4 корпорация Nikon установила встроенный моторный привод, исключив из кинематики взводной курок (однако, оставив рулетку ручной обратной перемотки). Примерно в это же время все производители фотоаппаратуры стали полностью отказываться от приставных моторов, сохранявших работоспособность фотоаппарата без элементов питания. Своё применение нашли батарейные рукоятки, иногда называвшиеся в обиходе «бустерами» (англ. Power Drive Booster)[18]. Такие рукоятки позволяли размещать дополнительные батареи, «разгоняя» встроенный мотор и увеличивая ресурс питания.
Из советских серийных камер с приставным вайндером могли работать только фотоаппараты «Алмаз-103» и «ЛОМО Компакт-Автомат», однако полноценное производство моторов для них так и не было развёрнуто, они существовали только в опытных разработках[19]. Единственным массовым типом камеры со встроенным электроприводом в СССР был «Зенит-5», выпущенный в 1960-х годах в количестве 11 тыс. 616 штук[20][* 4]. После этого советская промышленность серийно не выпускала моторных приводов для фотоаппаратов общего назначения. Автоматический перевод плёнки применялся в аэрофотоаппаратах (например, «ФКП-2» с электроприводом и электроспуском) и других специальных камерах[21]. В 2000-х годах в России встроенным мотором оснащался «Зенит-КМ» (2001—2005) и компактные фотоаппараты «Зенит» («Зенит-510», «Зенит-520», «Зенит-610», «Зенит-620», 2002—2002).
Моторный привод фотоаппарата состоит из металлического или пластмассового корпуса, в котором размещаются электродвигатель и передаточный механизм. Химические батареи первых моторов размещались в отдельном блоке питания, выносном или присоединявшемся непосредственно к приводу. Миниатюризация электродвигателей и повышение компактности источников питания позволили в дальнейшем размещать их в общем корпусе. Моторы для механических камер оснащались электромагнитным спуском, приводящим в действие затвор через специальный толкатель, дублирующий спусковую кнопку фотоаппарата. Поэтому, большинство моторов имели специальный электрический разъём для подключения дистанционного управления. Все моторные приводы оснащались автоматикой остановки по окончании ролика плёнки, которая срабатывала при возрастании усилия протяжки выше определённого порога[* 5].
Моторные приводы профессиональных фотоаппаратов кроме взвода затвора и перемещения плёнки могли осуществлять её обратную перемотку в кассету по окончании ролика[8]. Такой функцией оснащалось большинство приставных моторов фотоаппаратов Nikon F2, Nikon F3 и Canon New F-1. Так, приводы MD-1 и MD-2 для модели F2, а также привод MD-4[22] для модели F3 оснащались специальной муфтой, вдвигавшейся через отверстие корпуса камеры во фланец кассеты и осуществлявшей быструю перемотку, уменьшая время перезарядки фотоаппарата[* 6]. Аналогичную конструкцию имел привод FN для камеры Canon New F-1[23]. С отказом от приставных моторов в пользу встроенных, моторизованная обратная перемотка стала стандартом для всех фотоаппаратов. Кроме того, большинство профессиональных приводов оснащались собственным дополнительным счётчиком кадров, который можно было настраивать на автоматическое отключение протяжки после любого кадра. Это необходимо для ограничения длины серий при дистанционной съёмке, а также на морозе и в других ситуациях, когда есть опасность обрыва перфорации при автоматическом останове. Кроме перечисленных органов управления, моторные приводы обладали собственной спусковой кнопкой, заменявшей при работе привода спусковую кнопку камеры, а также переключателем режимов протяжки[12]. Переключатель режимов обязательно имел два положения: S (англ. Single shot) для покадровой съёмки и C (англ. Continuous shooting) для непрерывной. В некоторых приводах была возможность плавной или ступенчатой регулировки скорости протяжки плёнки. В современных цифровых фотокамерах этим переключателям соответствует селектор выбора режима Drive Mode.
Первые приставные электроприводы обладали только механическими связями с фотоаппаратом, поэтому интервал между командой на спуск затвора и началом его последующего взвода был фиксирован, и при установке длинных выдержек (как правило, длиннее 1/60 секунды) требовалось включение пониженной скорости с увеличенной задержкой. В противном случае взвод затвора мог начаться раньше окончания выдержки и повредить механизм. Так, приводы MD-1 и MD-2 для камеры Nikon F2 обеспечивали стандартную частоту съёмки 4,3 кадра в секунду в диапазоне выдержек не длиннее 1/125[24]. Для съёмки на более длинных выдержках предусмотрены ещё три пониженных скорости, позволявшие расширить диапазон до 1/60, 1/8 и 1/4 секунды. Установка более длинной выдержки затвора, чем разрешённая, грозила его поломкой[25]. Регулировка скорости протяжки отсутствовала в более дешёвом приводе MD-3, и установка выдержек длиннее 1/80 секунды при серийной съёмке запрещалась инструкцией[26]. Дальнейшее совершенствование приставных моторов привело к появлению их электрической связи с фотоаппаратом, позволив автоматически учитывать длину выдержки[12]. При этом взвод начинался только после замыкания контактов, сигнализирующих об опускании зеркала, исключая поломку и освобождая фотографа от необходимости следить за согласованием выдержки со скоростью протяжки.
Зависимость частоты съёмки от выдержки с появлением автоматики не изменилась: максимальная скорость обеспечивается до выдержек не длиннее 1/125 секунды, замедляясь при более длинных. Эта зависимость справедлива и для современных цифровых фотоаппаратов, автовзвод затвора которых так же выполняется только после окончания выдержки. Кроме передачи информации о состоянии затвора и зеркала, электрическая связь использовалась для включения экспонометра, а также для подключения систем фотоаппарата к более мощной батарее мотора[27].
Отсутствие плёнки и необходимости её перемотки в цифровом фотоаппарате, делает моторный привод ненужным. Перевод затвора во взведённое состояние не требует мощных электродвигателей и механизмов, и зачастую эту работу выполняет электромагнит, являющийся функциональной частью затвора. О плёночных моторах в цифровых камерах напоминает только селектор Drive mode, позволяющий регулировать частоту съёмки и выбирать между покадровым и серийным режимами. В этом же меню, как правило, находится включение автоспуска. От своих плёночных прототипов цифровая фототехника унаследовала батарейные рукоятки, уже широко применявшиеся на момент начала массового производства цифровых камер. Максимальная частота съёмки цифровых зеркальных фотоаппаратов ограничена инерцией зеркала, не превышая 14 кадров в секунду (Canon EOS-1D X Mark II). Более высокая скорость до 16 кадров в секунду достигается только при зафиксированном зеркале и выдержках не длиннее 1/250 секунды[28]. Беззеркальные фотоаппараты, способные отрабатывать выдержку регулировкой времени считывания заряда с матрицы, позволяют достигать любой частоты серийной съёмки, которая ограничена только длительностью выдержки.
wikiredia.ru
Мото́рный при́вод — механизм, предназначенный для автоматического взвода затвора плёночного фотоаппарата и перемещения фотоплёнки на следующий кадр, повышающий оперативность съёмки по сравнению с ручным взводом, и дающий возможность непрерывной съёмки серии кадров[1]. Первые моторные приводы были приставными и выполнялись как отдельное устройство, закрепляемое снизу фотоаппарата, и соединявшееся с ним через специальный электрический разъём и механические муфты. Моторные приводы выпускались, главным образом для малоформатных фотоаппаратов, получивших в середине XX века наибольшее распространение в профессиональной фотожурналистике, однако отдельные модели разрабатывались и для среднеформатных камер.

 Моторный привод Nikon MD-14
Моторный привод Nikon MD-14  Фотоаппарат Canon F-1 с присоединённым моторным приводом
Фотоаппарат Canon F-1 с присоединённым моторным приводом  Среднеформатная камера Pentax 645 со встроенным моторным приводом
Среднеформатная камера Pentax 645 со встроенным моторным приводом Моторный привод фотоаппарата в большинстве случаев представляет собой прямоугольный блок, в котором размещаются электродвигатель, передаточный механизм и химические батареи. Моторы для механических камер оснащались электромагнитным спуском, приводящим в действие затвор через специальный толкатель, дублирующий спусковую кнопку фотоаппарата. Благодаря наличию электроспуска применение моторного привода давало возможность дистанционного спуска затвора, а также серийной съёмки, запускаемой по проводу или радиопередатчику. Поэтому, большинство моторов имели специальный электрический разъём для подключения дистанционного управления. Все моторные приводы оснащались автоматикой остановки по окончании ролика плёнки, которая срабатывала при возрастании усилия протяжки выше определённого порога[П 1]. Для включения обратной перемотки в фотоаппарате, предусматривались дополнительные толкатели, передающие усилие нажима на кнопку включения обратной перемотки, недоступную при надетом моторе. Некоторые моторные приводы кроме взвода затвора и перемещения плёнки могли осуществлять обратную перемотку плёнки в кассету по окончании ролика. Так, привод Nikon MD-4[2] для фотоаппарата Nikon F3 оснащался специальной муфтой, вдвигавшейся через отверстие корпуса камеры во фланец кассеты и осуществлявшей быструю перемотку, уменьшая время перезарядки фотоаппарата. Кроме того этот тип привода оснащался собственным дополнительным счётчиком кадров, который можно было настраивать на автоматическое отключение протяжки после любого кадра. Это необходимо при съёмке на морозе и в других ситуациях, когда есть опасность обрыва перфорации при автоматическом останове. Кроме перечисленных органов управления, моторные приводы обладали собственной спусковой кнопкой, заменявшей при работе привода спусковую кнопку камеры, а также переключателем режимов протяжки. Переключатель режимов обязательно имел два положения: S (англ. Single shot) для покадровой съёмки и C (англ. Continuous shooting) для непрерывной. В некоторых приводах была возможность плавной или ступенчатой регулировки скорости протяжки плёнки. В современных цифровых фотокамерах этим переключателям соответствует селектор выбора режима Drive Mode.
Электрические контакты, связывающие моторный привод с фотоаппаратом, могли передавать информацию о взведённом и спущенном состоянии затвора, положении зеркала и другие данные. Некоторые типы моторов при соединении с камерой подключали её электрические цепи к своему мощному питанию. Автоматика мотора проектировалась с таким расчётом, что начало взвода и протяжки могло начинаться только после полного срабатывания затвора и опускания зеркала во избежание поломки. При длинных выдержках, превосходящих, как правило 1/125 секунды, скорость работы замедлялась из-за того, что мотору приходилось «ждать» закрытия затвора. В результате, частота съёмки любого мотора после определённого порога обратно пропорциональна выдержке. Эта зависимость справедлива и для современных цифровых фотоаппаратов, автовзвод затвора которых так же выполняется только после окончания выдержки.
Первые моторные приводы были механическими и работали от заводной пружины. Отечественный фотоаппарат «Ленинград» оснащался таким приводом, встроенным в камеру и протягивавшим до 10 кадров от одного завода. Однако, наиболее удобными стали электроприводы, состоявшие из электродвигателя, передававшего крутящий момент через специальный механизм. Первоначально такие приводы были приставными вследствие громоздкости и шумности. Кроме того, в те годы почти все фотоаппараты были механическими и сохраняли возможность ручного взвода затвора курком при работе без мотора и электропитания. Многие типы моторов позволяли в выключенном состоянии пользоваться ручным взводом и спуском камеры в ситуациях, когда работа шумного привода недопустима.
Более маломощная разновидность моторного привода — вайндер — отличалась отсутствием электроспуска и, как следствие — невозможностью серийной съёмки. Как правило, вайндеры предназначались для любительских фотоаппаратов и обеспечивали скорость съёмки 1,5—2 кадра в секунду, тогда как моторные приводы работали сериями со скоростью 3—6 кадров в секунду. Вайндеры часто были альтернативой более дорогому и тяжелому мотору. Фотограф мог в зависимости от задачи использовать лёгкий вайндер или скоростной мотор, выпускавшиеся для одного и того же типа фотоаппарата. Некоторые системные камеры могли оснащаться 3—5 различными типами разработанных специально для этой модели вайндеров и моторов. Универсальных стандартов крепления моторных приводов не существовало. Приставные моторы и вайндеры выпускались для конкретных моделей фотоаппаратов и были редко взаимозаменяемы из-за несовпадения размеров и механических характеристик. Одно из редких исключений — моторный привод Nikon MD-12[3] (или его разновидность MD-14), пригодный для целой линейки камер Nikon: FM, FE, FA, FM2, FE2, а также FM3A. Максимальная скорость протяжки при серийной съёмке у профессиональных моторов могла достигать 5—6 кадров в секунду. Одним из первых фотоаппаратов, оснащённых сверхскоростным мотором, снимавшим до 14 кадров в секунду, была специальная модификация Canon F-1 High Speed[4][5], оснащённая неподвижным полупрозрачным зеркалом.
В конце 1970-х годов появилась тенденция отказа от приставных моторов в любительских камерах и камерах среднего класса[П 2]. Привод начали встраивать непосредственно в фотоаппарат, одновременно убрав курок ручного взвода. Это упрощало и удешевляло механику камеры, сделав автовзвод доступным даже в «мыльницах». Такие фотоаппараты могли работать только от встроенного мотора, лишившись возможности взвода затвора без батарей. До конца 1980-х большинство профессиональных фотоаппаратов выпускались с приставными моторами, сохраняя механизм ручного взвода и возможность работы без электропитания. Однако, уже в 1988 году в профессиональной модели F4 Nikon Corporation установила встроенный моторный привод, исключив из кинематики взводной курок (однако, оставив рулетку ручной обратной перемотки). Примерно в это же время все производители фотоаппаратуры стали полностью отказываться от приставных моторов, сохранявших работоспособность фотоаппарата без элементов питания. Своё применение нашли батарейные рукоятки, иногда называвшиеся в обиходе «бустерами» (англ. Power Drive Booster)[4]. Такие рукоятки позволяли размещать дополнительные батареи, «разгоняя» моторный привод и увеличивая ресурс питания.
Из отечественных камер с приставным вайндером могли работать только фотоаппараты серии «Алмаз», однако их полноценное производство так и не было развёрнуто, а моторы существовали только в опытных разработках[6]. Поэтому, отечественная промышленность серийно не выпускала моторных приводов для фотоаппаратов.
Отсутствие плёнки и необходимости её перемотки в цифровом фотоаппарате, делает моторный привод ненужным. Перевод затвора во взведённое состояние не требует мощных электродвигателей и механизмов, и зачастую, это просто электромагнит, являющийся функциональной частью затвора. Лишь некоторые топовые модели профессиональных цифровых зеркалок оснащаются высокоскоростным механизмом, напоминающим встроенный моторный привод плёночных камер. О плёночных моторах в цифровых камерах напоминает только селектор Drive mode, позволяющий регулировать частоту съёмки и выбирать между покадровым и серийным режимами. От своих плёночных прототипов цифровая фототехника унаследовала батарейные рукоятки, уже широко применявшиеся на момент начала массового производства цифровых камер.
dic.academic.ru
Двигатели внутреннего сгорания находят широкое применение в передвижных строительных машинах. Достоинствами их являются: независимость от внешнего источника энергии, постоянная готовность к работе и небольшой вес, приходящийся на единицу мощности. K недостаткам их относятся: невозможность изменения направления вращения вала двигателя (реверсирования), малая способность к перегрузке, сложность пуска в зимнее время и сравнительно малый срок службы.
Для привода строительных машин применяют главным образом дизельные двигатели, работающие на соляровом масле или дизельном топливе. Такие двигатели расходуют на 1 л. с. в час на 30-40% меньше топлива, чем карбюраторные (бензиновые), причем это топливо значительно дешевле бензина.
B двигателе внутреннего сгорания тепловая энергия, скрытая в топливе в пределах 18-34%, преобразуется в механическую энергию вращающегося коленчатого вала. При сгорании топлива в цилиндре двигателя происходит нагревание газов, которые, расширяясь, давят на поршень, передающий усилие через шатун на коленчатый вал.
В состав двигателя внутреннего сгорания входят:
Дизельные двигатели не имеют системы зажигания, так как топливо в их цилиндрах воспламеняется под действием высокой температуры сжатого воздуха. В состав системы зажигания входят: свечи, между электродами которых в определенный момент появляется электрическая искра, источник высокого напряжения (магнето или индукционная катушка) напряжением 1200 В; прерыватель, распределитель, генератор и соединяющие их провода.
Двигатели внутреннего сгорания характеризуются номинальной (паспортной) мощностью в лошадиных силах, числом оборотов коленчатого вала в минуту и удельным расходом топлива. Последний определяется делением часового расхода топлива в граммах на развиваемую двигателем (эффективную) мощность в лошадиных силах.
Главными конструктивными параметрами двигателя внутреннего сгорания являются диаметр цилиндра, ход поршня, число оборотов коленчатого вала, рабочий объем цилиндров, степень сжатия, габаритные размеры двигателя и его вес.
Ходом поршня называется расстояние между положениями поршня в верхней мертвой точке (в.м.т.) и в нижней мертвой точке (н. м.т.).
Рабочий объем цилиндра - пространство, освобождаемое в цилиндре при перемещении поршня от в.м.т. до н. м.т. Рабочий объем цилиндра и объем пространства сжатия в сумме образуют полный объем цилиндра. Отношение полного объема цилиндра к объему пространства сжатия называется степенью сжатия. Для карбюраторных двигателей обычно она составляет 4,6 - 6,2‚ а для дизелей 14 - 22. Различают двигатели внутреннего сгорания двухтактные, где рабочий процесс совершается в течение двух ходов поршня, т. е. за один оборот коленчатого вала, и четырехтактные, где рабочий процесс в одном цилиндре повторяется через кажцые четыре хода поршня, т. е. за два оборота коленчатого вала. Рабочий процесс карбюраторного двигателя включает следующие такты: I - впуск, наполнение цилиндра смесью паров бензина и воздуха; II -сжатие горючей смеси и зажигание ее в конце такта сжатия электрической искрой; III – расширение продуктов сгорания горючей смеси; IV - выпуск отработанных газов из цилиндра.
Работа одноцилиндрового четырехтактного карбюраторного двигателя, происходит в следующем порядке. Поршень движется от верхней мертвой точки к нижней мертвой точке и создает в полости цилиндра разрежение при этом открывается впускной клапан и горючая смесь из карбюратора по впускной трубе поступает в цилиндр. Давление в цилиндре составляет 0,7 - 0‚95 кгс/см2, температура смеси 80-130°С. Смесь нагревается от соприкосновения с нагретыми стенками деталей двигателя и смешивается с остатками отработанных газов.
По окончании такта впуска поршень движется от нижней мертвой точки к верхней мертвой точке и сжимает горючую смесь; клапаны при этом закрыты. Величина давления зависит от степени сжатия и достигает 6-9 кгс/см2, температура смеси повышается до 300°C. Увеличение давления и температуры смеси повышает мощность и экономичность двигателя, но увеличение степени сжатия ограничивается температурой самовоспламенения рабочей смеси и детонацией - горением взрывного характера. Предельное значение степени сжатия выбрано таким, чтобы температура смеси в конце сжатия не достигала температуры самовоспламенения. В конце такта сжатия рабочая смесь воспламеняется от электрической искры, появляющейся между электродами свечи. Горение смеси сопровождается выделением большого количества тепла, резким повышением температуры до 1800-2000°С и давления до 30-40 кгс/см2. Под давлением газов поршень движется вниз и через шатун передает усилие на коленчатый вал, осуществляя рабочий ход. В конце рабочего хода открывается впускной клапан, и отработанные газы по выхлопному трубопроводу через глушитель удаляются в атмосферу. При движении поршня вверх выпускной клапан остается открытым и поршень выталкивает из цилиндра отработанные газы. Давление в цилиндре составляет 1,05 - 1,1 кгс/см2, а температура отработанных газов снижается до 700-800°С.
В четырехтактном двигателе только один из четырех тактов является рабочим. Для обеспечения равномерности вращения коленчатого вала служит массивный маховик. Более равномерно работают двигатели с 4 - 6 цилиндрами, выполненных в одном корпусе - блоке.
Своевременное открывание и закрывание клапанов обеспечивается вращающимся распределительным кулачковым валом. Кулачки распределительного вала приподнимают толкатели, которые, смещая вверх клапаны, открывают выпускные или впускные отверстия. Для прижатия клапанов к седлам служат пружины. Шестерня распределительного вала имеет в два раза больше зубьев, чем шестерня коленчатого вала. За два оборота коленчатого вала распределительный вал поворачивается один раз. Это нужно для того, чтобы клапаны открывались только один раз за рабочий цикл двигателя.
Процесс работы дизеля отличается от процесса работы карбюраторного двигателя методом образования и воспламенения смеси. Рабочий процесс дизеля включает следующие такты: I - впуск, наполнение цилиндров воздухом; II - сжатие воздуха и впрыск топлива в конце такта сжатия; III – расширение продуктов сгорания горючей смеси; IV - выпуск отработанных газов из цилиндра. Для воспламенения впрыскиваемого в цилиндр дизеля топлива необходимо, чтобы температура сжатого воздуха была выше температуры самовоспламенения топлива. Степень сжатия в дизелях колеблется от 14 до 22; давление составляет 30-40, a при наддуве - 70 кгс/см2; температура воздуха в конце такта сжатия 500-600° С.
Топливо впрыскивается в цилиндры дизеля через форсунки топливным насосом при давлении 150-200 кгс/см2, значительно большем, чем давление сжатого в цилиндре воздуха. Такое давление обеспечивает лучшее использование калорийности топлива и снижает ее расход. Механическое распыление топлива форсунками позволяет применять трудно испаряющиеся, безопасные в пожарном отношении сорта топлива. Дизели не требуют устройств для принудительного воспламенения топлива.
Дизели имеют больший вес, чем карбюраторные двигатели такой же мощности, и их запуск в зимнее время более сложен.
zpchasti.ru
Доктор Вольт, для Ua.Automation.com
АВР с мотор-приводом
Сегодня мы продолжим наш рассказ об АВР, и поговорим о такой их разновидности как АВР на рубильниках с коммутирующей частью в виде мотор-привода (о других разновидностях, кстати, поговорим тоже).
Рубильники с мотор-приводом еще называют «Переключателями нагрузки с мотор-приводом» или «Автоматизированными переключателями нагрузки». Здесь и далее мы будем применять термин «Рубильники с мотор-приводом».
Если в схеме АВР с контакторами заменить их на рубильник с мотор-приводом, то мы получим также АВР, но с другой коммутирующей частью.

В 1-й части я уже писал о классификации этих устройств: контакторы, рубильники с мотор-приводом, автоматические выключатели, рубильники соленоидного типа. Это основные типы. Еще можно применять так называемые статические переключатели, но это отдельная тема не для сегодняшнего нашего разговора…
Преимущество
Используя вместо контакторов рубильник с мотор-приводом мы получаем тот же АВР, который выполняет все те же функции, что и контакторный АВР, но, с одним огромным преимуществом.
Это преимущество заключается в самой конструкции такого рубильника-переключателя. Здесь не надо механической блокировки, здесь не надо электрической блокировки – все просто.
Механизм рубильника такой, что контакты средней точки (они же подключаются к нагрузке) подключаются либо к контактам 1-го ввода либо к контактам 2-го ввода: как бы происходит перекидывание силовых контактов. Поэтому такие рубильники и называют – перекидные.
Автоматизация рубильника заключается в присоединении двигателя к ручке переключения, вернее к валу переключения, на которых размещены силовые контакты. Управляя двигателем мы управляем переключением.
Еще одно преимущество этого рубильника в том, что при отказе цепей управления автоматическим переключением (отказе релейной схемы) рубильник можно переключить руками! Ручку вставил в паз, повернул и произвел нужное переключение. Это увеличивает надежность схемы питания нагрузки.
Недостатки
Основным недостатком рубильника с мотор-приводом является его медлительность. Ну не может он быстро переключаться, как контакторы. Время переключения такого типа рубильников от 0,5 с до 4 с (время приведено примерное и оно также зависит от габарита и номинального тока рубильника).
Реально, при применении рубильника в схемах управления, время переключения может быть еще большим. Это связано с дополнительными специальными временными задержками.
Здесь остановлюсь и распишу подробнее, вернее дополню предыдущую информацию о взаимоблокировках.
В 1 части я уже упоминал явление взаимоблокировок – механических и электрических. «Электрическая взаимоблокировка – это система вспомогательных контактов, включенных определенным образом в цепи питания катушек контакторов, для исключения одновременной подачи на них напряжения управления». Но существует, можно сказать, подвид электрической блокировки – временная блокировка. Проще говоря, к системе вспомогательных контактов добавляются контакты реле времени, которые замедляют подачу напряжения на катушки контакторов. Реле времени используются как электрического типа, так и пневматического типа. Данный вид блокировки применяется, если на контакторах нет возможности установить механическую блокировку или этот тип контакторов просто не имеет механической блокировки.
Отметим, что для АВР на три и более ввода интересны комбинации контакторов и рубильников с мотор-приводами. Эта «интересность» дает повышенную надежность и быстрое переключение.
АВР на автоматических выключателях
Сразу проведем разделение – могут применятся автоматические выключатели так называемого корпусного исполнения и автоматические выключатели выкатного исполнения. Хотя, в принципе, можно еще выделить вариант на автоматических выключателях модульного типа.

Степени применимости
Корпусные автоматические выключатели – это которые в корпусах (немодульные), например, на токи от 100А до,… ну скажем, 1250А. (Хотя лучше, наверное, до 800А… Это объясняется тем, что на ток 1250А и выше, лучше, целесообразнее применить автоматические выключатели выкатного исполнения).
В данном типе АВР в качестве коммутирующего элемента применяются автоматические выключатели с мотор-приводом, который автоматически включает и отключает автоматический выключатель. Еще в данном АВР можно произвести переключение «вручную», что есть тоже хорошо для эксплуатации.

Преимущество состоит в том, что АВР не только производит коммутацию, но и имеет защиту по каждому вводу! В предыдущих вариантах этого (защиты по вводам) не было. В тех вариантах необходимо было дополнительно предусматривать защиту вводов (от токов КЗ и перегрузок).
Преимущество серьезное, но сопровождается и рядом недостатков:
– медлительность – время переключения более 0,5 с. Т.е. хуже, чем у контакторов, но сравнимо с рубильниками с мотор-приводом.
– конструктивная особенность. Мотор-привод крепится на корпус выключателя, что имеет свои особенности – не всегда надежная работа. Тут со мной могут поспорить, особенно, поставщики оборудования. Но я практик и могу утверждать, что, например, если после транспортировки изделия необходимо опять настраивать систему АВР, мотор-приводов, механических блокировок и прочая и прочая… а раз идут дополнительные работы, то это – недостаток.
– механическая блокировка. Она также крепится дополнительно(см.выше), либо сзади автоматических выключателей, либо спереди на мотор-приводы. Требует наладки – в общем, «не фонтан».
На все эти недостатки, конечно, закрывают глаза, если это решение запроектировано или этого захотел Заказчик, или по-другому сделать нельзя…
Кстати, можно выделить еще один тип автоматических выключателей, а именно, выдвижного исполнения. Это другая разновидность корпусного автоматического выключателя с выдвижной корзиной. Достаточно сложная система – автоматический выключатель + мотор-привод + выдвижная корзина + механическая блокировка.
АВР на выкатных автоматических выключателях
Здесь в качестве коммутирующих устройств применяются автоматические выключатели, так называемого, выкатного исполнения. Это очень интересные автоматические выключатели.

Воздушные автоматические выключатели выкатного исполнения имеют конструктивную особенность: есть корпус автоматического выключателя и есть корзина с контактной системой, куда входит (и выходит :)) этот корпус…
Конструктивно сам автоматический выключатель несколько отличается от корпусного автоматического выключателя: другая система контактов, встроенный мотор-привод, куча всяких катушек и «штук» - блок-контактов, независимых расцепителей, расцепителей минимального напряжения, электронных расцепителей, различных систем силовых контактов и т.д. и т.п… Это объясняется тем, что они предназначены для коммутации больших рабочих токов (от 630 до 6000А) и, соответственно, больших токов КЗ. Здесь и требуются все те «штуки», которые обеспечивают надежность работы, повышенную чувствительность – не побоюсь этого слова – разумность…

Данные автоматические выключатели имеют тросовые механические блокировки, причем для различных вариантов АВР, скажем, не только для двух автоматических выключателей (по приведенным штатным схемам), но и более сложных АВР для двух автоматических выключателей и секционного автоматического выключателя.
Особенности
Время срабатывания АВР достаточно большое (хотя здесь уже, на больших токах коммутации, это не важно. Вернее, быстрое время срабатывания АВР здесь не нужно).
1) Автоматические выключатели данного типа имеют ограниченный ресурс включения/отключения.
2) Представьте себе следующую ситуацию: ток коммутации 1000А или более, а тут АВР «щелкает» туда-сюда… и что после этого будет с контактами, пусть они даже и посеребренные – они сгорят! Потом, еще есть такое понятие, как переходные процессы, связанные с большими токами при перекоммутациях. Это значит, что к рабочему току добавляется бросок тока, читай – резкое его увеличение, например, если нагрузка имеет индуктивный характер. Вот поэтому, здесь все медленно и размеренно, в соответствии с логикой переключения. Пропал ввод – отключился вводной выключатель (данного ввода). Через выдержку времени включился выключатель другого ввода. И наоборот – клац! – отключение! ... выдержка …клац! – включение …Тут уже встает вопрос оперативного напряжения питания для релейных цепей управления…
АВР на рубильниках соленоидного типа
Рассмотрим АВР на рубильниках соленоидного типа, к примеру, от производителя ASCO. Американский продукт: надежный, быстрый,… дорогой.

Принцип – похож на рассмотренный выше, в примере с АВР на рубильниках с мотор-приводом. Силовая часть – группа перекидных контактов – принцип коромысла, когда замыкание происходит либо с одной стороны, либо с другой, а середина подключена к нагрузке. Т.е. механическая блокировка заложена в самой конструкции.
Перекидные контакты приводится в действие не электродвигателем, а соленоидом, на который подается управляющее напряжение. Переключение происходит очень быстро! Производитель может обеспечить быстроту переключения в 50 мс!
Преимущества
Их много. Большой ресурс + большая перегрузочная способность + быстродействие + блок управления = полностью законченный АВР. Еще можно добавить, что есть возможность переключения «вручную» при отключенном напряжении управления.

Но даже в этой бочке меда есть изрядная ложка дегтя.
Недостатки
Дороговизна!!! (Кстати, не забудьте еще защитить питающие вводы: данный переключатель – только переключатель). Могут возразить, что «зато это надежный вариант»… Потом расскажут, что если провести сравнения по номинальному току и сравнить традиционные варианты, то это не всегда и дорого… или «относительно не дорого»…
Я даже не буду возражать – кто себе может позволить приобрести в щитовую АВР такого типа – я только за! Тем более, кто внимательно изучит эти устройства и «въедет» во все нюансы, то найдет там еще много интересных технических решений. Например, различные типы переключений данных рубильников – с открытым переходом, с закрытым переходом и не только.
Есть вариант так называемого синфазного переключения – очень интересная возможность! Правда, нужен специальный блок управления, но зато – какое решение – переключение с одного питающего ввода на другой под нагрузкой, без пропадания «сети» в момент «0». То есть без броска тока! Блок контролирует оба ввода и в момент фазовой синхронизации – «перехода напряжения обеих вводов через 0» производит переключение.
Некоторые комментарии
Все это «Просто Супер»! Но, опять же есть одно «но». Технически грамотных решений с применением таких рубильников мало. Например, быстрота переключений нужна? – нужна… а для какого случая? Необходимо четко представлять себе, что вы хотите реализовать.
Столкнулся года 2,5 назад со следующим применением рубильников ASCO – есть сетевые вводы, и есть ДГУ, причем, достаточно большой мощности (время выхода на режим около 0,5-1 мин). И там везде эти рубильники. Решение интересное и дорогое – рубильники ASCO с блоками управления, «продвинутой» серии, с блоком синфазного включения, с мониторами, с байпасными переключателями ASCO! (есть и такие у них!)… По сложности – почти, как на подводной лодке )).
А потом оказалось, что всем этим оборудованием эксплуатационный персонал не умеет пользоваться. Потом, все критические нагрузки защищены ИБП (как минимум, 7 минут!). Вопрос – а зачем это все? Насколько целесообразно применение такого оборудования? Вывод – средства потрачены не вполне рационально.
Решение можно было сделать более простым, как по оборудованию, так и по обслуживанию – и более дешевым. Например, между сетевыми вводами применить рубильники ASCO – быстрое переключение, ИБП практически не разряжают батареи. А для подключения ДГУ применить рубильник перекидного типа с мотор-приводом. (Надо цепи обводного питания – это делается также просто, на тех же ручных перекидных рубильниках. Опять, надо определиться с целесообразностью этих ремонтных цепей).
Если посчитать время переключения, то получаем следующий вариант: после пропадания обоих питающих вводов – 2-5 с на контроль «сети», потом запуск ДГУ 60 с, потом контроль напряжения ДГУ 2-3 с и переключение – 3-4 с. Итого: - 72 секунд, чуть более 1 минуты. ИБП держат критические нагрузки минимум 5-7 минут. Уложились совершенно спокойно.
Продолжение следует…
Связаться с автором можно по адресу: [email protected]
ua.automation.com
Cтраница 1
Двигатели приводов подач станков с ЧПУ, имеющие специальную конструкцию и работающие с конкретными УЧПУ являются частью системы ЧПУ. [2]
Наибольшую мощность потребляют обычно двигатели главных электроприводов, значительно меньшую мощность - двигатели приводов подач и вспомогательных механизмов. Каждый из отдельных приводов в разные периоды времени затрачивает неодинаковую мощность, это зависит от режима его работы. Главные электроприводы и электроприводы подач крупных металлорежущих станков обычно работают в продолжительном режиме, а на средних и мелких станках - в повторно-кратковременных режимах. Вспомогательные электроприводы станков работают в кратковременных режимах. Таким образом, большинство электродвигателей на станках работают значительную часть времени с недогрузкой и потребляют из сети мощность меньше номинальной. К этому нужно добавить еще резервы мощности, закладываемые технологами и образующиеся в результате того, что двигатель по каталогу выбирают не точно, а по ближайшей мощности больше требуемой. Кроме этого, как это часто бывает на универсальных станках, работы выполняют с недогрузкой электроприводов. В большей степени это относится к главным электроприводам и в меньшей к электроприводам подач и вспомогательных механизмов на-грузка которых мало зависит от технологических режимов и остается почти всегда постоянной. Еще одной причиной недогрузки электроприводов станков является очень большое разнообразие работ, выполняемых в условиях мелкосерийного и индивидуального производства на металлорежущих станках, что приводит к большим затратам времени вспомогательных операций, когда электродвигатели отключены или работают вхолостую. К таким вспомогательным операциям относятся измерения размеров деталей, отвод, подвод и смена инструмента и заготовки. Следовательно, станок в свои рабочие периоды потребляет какую-то среднюю мощность, которая меньше максимальной. [3]
При наличии свайного аппарата кареточного типа датчик положения в забое на каждой бровке канала посылает команду на включение двигателя привода подачи. Если при этом весь ход каретки будет использован, сработает концевой выключатель, произойдет опускание закольной сваи, затем подъем рабочей сваи, передвижение каретки в исходное положение, заглубление рабочей сваи, подъем холостой сваи и, наконец, подача команды на па-пильонаж. [4]
Они обеспечивают равномерное перемещение при медленных и высоких скоростях и весьма малом коэффициенте трения, покоя, снижают мощность двигателей приводов подач, обеспечивают повышенную жесткость, точность и долговечность. [6]
Движение суппорта по инерции и отрыв его от тянущего органа с последующим произвольным позиционированием в пределах зоны нечувствительности происходит в том случае, если время торможения механической системы больше времени торможения двигателя привода подачи Гпр. [8]
Система ЧПУ может видоизменяться в зависимости от вида программоносителя, способа кодирования информации в УП и метода ее передачи в систему ЧПУ. Двигатели приводов подач станков с ЧПУ, имеющие специальную конструкцию и работающие с конкретными УЧПУ, являются составной частью системы ЧПУ. [10]
Каждому штриху соответствует один импульс. Поступающие на двигатель привода подачи импульсы отрабатываются исполнительным органом. Каждому импульсу соответствует определенное ( дискретное) перемещение ИО; длина этого перемещения определяется числом импульсом, содержащихся в кадре магнитной ленты. Такая запись команд на перемещение исполнительного органа называется декодированной. [12]
В цепях подачи основная нагрузка создается действием сил трения, величина которых при изменении скорости подачи практически не изменяется. Следовательно, привод подачи должен при всех частотах вращения преодолевать один и тот же момент сил трения. Поэтому двигатель привода подачи должен иметь регулирование с постоянным предельно допустимым моментом. [13]
На рис. VI1 - 20 показана общая компоновка фрезерного станка с цифровой системой программного управления на основе следящего привода. После этого командные сигналы, характеризующие требуемое перемещение и скорость исполнительного органа станка, преобразуются и усиливаются соответствующими частями ( элементами) электронной схемы управления и поступают в сравнивающее устройство. Сюда же поступают сигналы от датчика обратной связи 4, которые характеризуют действительное положение исполнительного органа станка. Сравнивающее устройство выдает сигнал рассогласования, который воздействует на двигатель привода подачи 5, а тот через безлюфтовый зубчатый редуктор и шариковинтовую пару осуществляет требуемое перемещение исполнительного органа станка до устранения данного рассогласования. [15]
Страницы: 1 2
www.ngpedia.ru