За высоту оси вращения электрической машины h принимают расстояние от оси вращения до опорной плоскости электродвигателя.
Часто, высоту оси вращения называют габарит электродвигателя.
Толщина регулировочных прокладок, применяемых при установке, в высоту оси вращения не входит. Дистанционные прокладки учитывают в высоте оси вращения, если они входят в состав электродвигателя.



Номинальные значения и предельные отклонения высоты оси вращения электрических вращающихся машин и непосредственно соединяемых с ними неэлектрических регламентированы ГОСТ 13267–73.
Номинальные высоты оси вращения выбираются из рядов предпочтительных чисел R5, R10, R20 по ГОСТ 8032–84 в соотвествии с указанными в ГОСТ 13267–73.
Для электродвигателей фланцевой формы исполнения, встраиваемых машин и машин других специальных видов крепления (на приподнятых лапах или без лап) устанавливают условную высоту оси вращения h' – расстояние от оси вращения до условной опорной плоскости машины.
Для электродвигателей фланцевого исполнения без лап (группы IM3 и IM4 по ГОСТ 2479), представляющие собой конструктивные модификации основного исполнения машин с лапами (группы IM2, исполнений IM10 и IM12), условной высотой оси вращения является высота оси вращения основного исполнения.
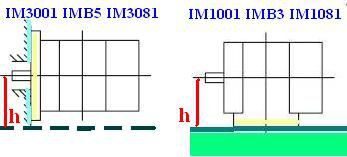

Для электродвигателей фланцевого исполнения без лап (группы IM3 и IM4 по ГОСТ 2479), встраиваемых машин, мащин других специальных видов крепления без лап, а также машин с приподнятыми лапами (исполнений IM11 и IM13), не являющихся конструктивными модификациями электродвигателей основного исполнения с лапами, h принимают равной (0,51... 0,54) d30, где d30– диаметр наибольшей окружности, в которую вписывается корпус электродвигателя.
Стандартные высоты вращения (габариты) асинхронных общепромышленных и взрывозащищенных электродвигателей
по ГОСТ и DIN для исполнений IM 1001, B3, 1081, 2001, B35, 2081, 3001, B5, 3081
Перейти в раздел Электродвигатели



arosna.com
Габарит электродвигателя. Высотой оси вращения электродвигателя h называют расстояние от оси вращения до опорной плоскости электрической машины. Часто, высотой оси вращения называют габарит электродвигателя. Применяемые при установке регулировочные прокладки, в высоту оси вращения не входят. Входящие в комплект электродвигателя дистанционные прокладки учитываются в расчете высоты оси вращения ( габарита электродвигателя ).
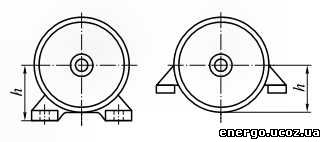
h - высота оси вращения электродвигателя (габарит электродвигателя).
ГОСТ 13267–73 указывает номинальные значения и предельные отклонения высоты оси вращения электрических вращающихся машин и непосредственно соединяемых с ними не электрических. ГОСТ 8032–84 регламентирует номинальные высоты оси вращения которые следует выбирать из рядов предпочтительных чисел R5, R10, R20. Стандарты допускают использование нулевой высоты оси вращения электродвигателя. Выбор высот оси вращения - при выборе предпочитают ряд R5 ряду R10, ряд R10 ряду R20.
Высоты осей вращения электрических машин согласно ГОСТ 13267—73 должны соответствовать следующему ряду:
25, 28, 32, 36, 40, 45, 50, 56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355, 400, 450, 500, 560, 630, 710, 800, 900, 1000 мм.
Для фланцевых электродвигателей, встраиваемых электрических машин и электродвигателей других специальных видов крепления устанавливают "условную" высоту оси вращения h' – расстояние от оси вращения до условной опорной плоскости машины. Измеренная "условная" высота оси вращения округляется до ближайшего, указанного в стандарте меньшего значения номинальной высоты оси вращения электродвигателя.
Источник:
energo.ucoz.ua
У большинства выпускаемых асинхронных двигателей общего назначения отношение λ, изменяется в достаточно узких пределах. Поэтому для определения D и lδ можно предварительно выбрать то или иное отношение λ, характерное для заданного исполнения и числа полюсов машины. Это позволит однозначно определить главные размеры, исходя из (9.1). Однако внутренний диаметр статора непосредственно связан определенными размерными соотношениями с внешним диаметром статора Da, в свою очередь, определяющим высоту оси вращения h, значение которой при проектировании новых двигателей может быть принято только из стандартного ряда высот, установленных ГОСТом.
Внешний диаметр статора должен также соответствовать определенным условиям, налагаемым требованиями раскроя листов электротехнической стали с наименьшими отходами при штамповке. С учетом этих требований при ручном расчете асинхронного двигателя более целесообразным является выбор главных размеров, основанный на предварительном определении высоты оси вращения, увязке этого размера с внешним диаметром статора и последующем расчете внутреннего диаметра статора D.
В связи с этим выбор главных размеров проводят в следующей последовательности.
Высоту оси вращения предварительно определяют по рис. 9.18, а или б для заданных Р2 и 2р в зависимости от исполнения двигателя.
Из ряда высот осей вращения (см. табл. П 6.2) принимают ближайшее к предварительно найденному меньшему стандартному значению Л. Следует иметь в виду, что ГОСТ определяет стандартные высоты осей вращения независимо от назначения и конструктивного исполнения асинхронных двигателей, поэтому высота оси вращения любого проектируемого двигателя должна быть равна одному из этих значений.
Зависимость (9.1) показывает, что при одной и той же длине l мощность P' изменяется пропорционально D2. Поэтому машину при выбранной высоте оси вращения выгодно выполнять с возможно большим диаметром. Максимально возможный диаметр Dа должен быть Da ≤ 2(h – h2min), где h2min — минимальное расстояние от стали сердечника статора до опорной плоскости машины (рис. 9.19), включающее толщину корпуса bкорп и расстояние от корпуса до опорной плоскости h3. Если машина выполняется со сварной станиной, то допустимое расстояние h2min уменьшается. В том случае, когда h2 >> h2min, в нижней части корпуса оребренных двигателей исполнения со степенью защиты IP44 размещают несколько охлаждающих ребер, высота которых может быть меньше, чем у расположенных на верхней и боковых частях корпуса.
Обычно расстояние h2 выбирают равным или несколько большим h2min, значения которого для двигателей с различной высотой оси вращения h приведены на рис. 9.19. При выборе Da должно быть учтено также требование использования для штамповки рулонной или листовой электротехнической стали стандартных размеров с наименьшими отходами.

Рис. 9.18. Высота оси вращения h двигателей
различных мощности и частоты вращения:
а — со степенью защиты IP44;
б — со степенью защиты IP23
Внешние диаметры сердечников статоров двигателей серий в зависимости от высоты оси вращения при учебном проектировании могут быть приняты по данным табл. 9.8.

Рис. 9.19. К выбору наружного диаметра Dc статора (а).
Минимально допустимое расстояние h2 от сердечника
статора до опорной поверхности двигателя в зависимости
от высоты оси вращения двигателей со станиной (б):
1 — литой; 2 — сварной
Таблица 9.8. Внешние диаметры статоров асинхронных
двигателей различных высот оси вращения
| h, мм | ||||||
| Da, мм | 0,08— 0,096 | 0,1—1,08 | 0,116—0,122 | 0,131—0,139 | 0,149—0,157 | |
| h, мм | ||||||
| Da, мм | 0,168—0,175 | 0,191-0,197 | 0,225—0,233 | 0,272—0,285 | 0,313—0,322 | |
| h, мм | ||||||
| Da, мм | 0,349—0,359 | 0,392—0,406 | 0,437—0,452 | 0,52-0,53 | 0,59 | 0,66 |
Внутренний диаметр статора D в общем случае можно определить по внешнему диаметру, высотам ярма (ha) и зубцов (hz) статора:
D = Da — 2(ha + hz).
На данном этапе расчета размеры ha и hz неизвестны. Поэтому для определения D используют эмпирические зависимости. При одном и том же уровне индукции на участках магнитопровода в машинах с одинаковым D высота ярма статора будет пропорциональна потоку, а следовательно, обратно пропорциональна числу полюсов машины (прямо пропорциональна полюсному делению). Принимая, что размеры пазов не зависят от числа полюсов машины, получаем приближенное выражение
D = KDDa. (9.2)
Значения коэффициентов КD, приведенные в табл. 9.9, характеризуют отношения внутренних и внешних диаметров сердечников статоров асинхронных двигателей серий 4А и АИ при различных числах полюсов и могут быть использованы для предварительного определения D вновь проектируемой машины.
Таблица 9.9. Отношение КD = D/Da, в асинхронных двигателях
в зависимости от числа полюсов
| 2p | 10—12 | ||||
| КD | 0,52—0,6 | 0,62—0,68 | 0,7—0,72 | 0,72—0,75 | 0,75—0,77 |
Далее находят полюсное деление τ, м:
τ = πD/2p (9.3)
и расчетную мощность Р, В • А:
P' = mIE = P2 (9.4)
(9.4)
где Р2 — мощность на валу двигателя, Вт; kE — отношение ЭДС обмотки статора к номинальному напряжению, которое может быть приближенно определено по рис. 9.20.
Предварительные значения η и cos φ, если они не указаны в задании на проектирование, находятся по ГОСТу. Приближенные значения η и cos φ могут быть приняты по кривым рис. 9.21.
Предварительный выбор электромагнитных нагрузок А, А/м, и Bδ, Тл, должен быть проведен

Рис. 9.20. Значения коэффициента KE


Рис. 9.21. Примерные значения КПД и cos φ асинхронных двигателей:
а — со степенью защиты IP44 и мощностью до 30 кВт;
б — со степенью защиты IP44 и мощностью до 400 кВт;
в — со степенью защиты IP23
особо тщательно, так как они определяют не только расчетную длину сердечника, но и в значительной степени характеристики машины. При этом если главные размеры машины зависят от произведения АВδ [см. (9.1)], то на характеристики двигателя оказывает существенное влияние также и соотношение между этими величинами. Рекомендации по выбору А и Вδ представлены в виде кривых на рис. 9.22—9.24 для машин различных мощности и исполнения. На каждом из рисунков даются области их допустимых значений. При выборе конкретных значений А и Вδ в пределах рекомендуемой области следует, руководствуясь приведенными выше замечаниями, учитывать требования технического задания к хактеристикам проектируемого двигателя.
Коэффициент полюсного перекрытия αδ и коэффициент формы поля kВ в асинхронных машинах определяются степенью уплощения кривой поля в зазоре, возникающей при насыщении зубцов статора и ротора, и могут быть достаточно достоверно определены топь ко после расчета магнитной цепи. Поэтому для расчета магнитной цепи удобнее рассматривать синусоидальное поле, а влияние уплощения учесть при расчете магнитного напряжения отдельных участков магнитной цепи.


Рис. 9.22. Электромагнитные нагрузки асинхронных двигателей
со степенью защиты IP44 при высоте оси вращения:
а – h ≥ 132 мм; б – h = 150…250 мм;
в – h ≥ 280 мм (с продуваемым ротором)

Рис. 9.23. Электромагнитные нагрузки асинхронных двигателей
со степенью защиты IP23 при высоте оси вращения:
а – h = 160…250 мм; б – h ≥ 280 мм;

Рис. 9.24. Электромагнитные нагрузки асинхронных
двигателей высокого напряжения со степенью защиты IP23
Основываясь на этом, значения коэффициентов предварительно принимают равными:
αδ = 2/π ≈ 0,64; kВ = π/(2  ) = 1,11.
) = 1,11.
Предварительное значение обмоточного коэффициента k0e\ выбирают в зависимости от типа обмотки статора. Для однослойных обмоток koб1 = 0,95...0,96. Для двухслойных и одно-двухслойных обмоток при 2р = 2 следует принимать koб1 = 0,90... 0,91 и при большей полюсности koб1 = 0,91. ..0,92.
Синхронная угловая частота двигателя Ω, рад/с, рассчитывается по формуле
Ω = 2π  или Ω = 2π
или Ω = 2π  (9.5)
(9.5)
где n1 — синхронная частота вращения, об/мин; f1 — частота питания, Гц.
Из (9.1), с учетом значенияαδ , расчетная длина магнитопровода, м,
 . (9.6)
. (9.6)
Критерием правильности выбора главных размеров D и lδ служит отношение λ = lδ /τ, которое обычно находится в пределах, показанных на рис. 9.25 для принятого исполнения машины. Если λ оказывается чрезмерно большим, то следует повторить расчет для ближайшей из стандартного рада большей высоты оси вращения А. Если К слишком мало, то расчет повторяют для следующей в стандартном раду меньшей высоты h.
На этом выбор главных размеров заканчивается. В результате проделанных вычислений получены значения высоты оси вращения h, внутреннего диаметра статора D, внешнего диаметра статора Dа, расчетной длины магнитопровода lδ и полюсного деления τ.

Рис. 9.25. Отношение λ = lδ /τ у двигателей исполнения
по степени защиты:
а – IP44; б – IP23
Для расчета магнитной цепи помимо lδ необходимо определить ценностью конструктивную длину и длину стали сердечников статора (l1 и lст1) и ротора (l2 и lст2). В асинхронных двигателях, длина сердечников которых не превышает 250. ..300 мм, радиальные вентиляционные каналы не делают. Сердечники шихтуются в один пакет. Для такой конструкции
l1 = lст1 = lδ. (9.7)
В более длинных машинах сердечники подразделяют на отдельные пакеты, разделенные между собой радиальными вентиляционными каналами. В двигателях с фазными роторами или со сварной короткозамкнутой обмоткой пакеты выполняют длиной 40...60 мм. Крайние пакеты могут быть более длинными. В двигателях с литой короткозамкнутой обмоткой ротора число пакетов по технологическим соображениям из-за сложности заливки уменьшают и пакеты выполняют более длинными.
Стандартная ширина радиального воздушного канала между пакетами bk = 10 мм. Число пакетов nпак и их длина lпак связаны с расчетной длиной следующим соотношением:
nпак = lст / lпак ≈ lδ / lпак = целое число, (9.8)
при этом число радиальных каналов nк = nпак - 1.
Длина стали сердечника статора в таких машинах
lст1 = lпак nпак, (9.9)
или при пакетах разной длины
lст1 =  (9.10)
(9.10)
Конструктивная длина сердечника статора
l1 = lст1 + bк nк. (9.11)
Окончательное значение lδ для машин с δ < 1,5 мм
lδ ≈ lст1. (9.12)
В машинах с δ ≥ 1,5 мм при расчете lδ учитывают искривление магнитных силовых линий потока в воздушном зазоре над радиальными вентиляционными каналами (см. § 4.2):
lδ ≈ l1 - b'к nк, (9.13)
где b'к — расчетная ширина радиальных каналов, зависящая от соотношения δ и δк. Значение b'к при bк = 10 мм определяется по табл. 9.10 либо из выражения
b'к = γ'δ (9.14)
Таблица 9.10. Расчетная ширина радиальных каналов ft; при Ь* = 10 мм
| δ, мм | 1,5 | 1,6 | 1,7 | 1,8 | 1,9 | 2,0 | 2,5 | 3,0 |
| b'к, мм | 7,3 | 7,1 | 7,0 _ | 6,9 | 6,8 | 6,7 | 6,2 | 5,7 |
где

Конструктивную длину сердечника ротора в машинах с h < 250 мм берут равной длине сердечника статора, т. е. l2 = l1. В двигателях больших габаритов ротор выполняют длиннее статора за счет увеличения длины его крайних пакетов на 5 мм и в крупных машинах высокого напряжения — на 10 мм.
Длина стали сердечника ротора
lст2 =  = l2 – nкbк (9.15)
= l2 – nкbк (9.15)
Следующий этап расчета включает определение числа пазов статора Z1 и числа витков в фазе обмотки статора w1. При этом число витков фазы обмотки статора должно быть таким, чтобы линейная нагрузка двигателя и индукция в воздушном зазоре как можно более близко совпадали с их значениями, принятыми предварительно при выборе главных размеров, а число пазов статора обеспечивало достаточно равномерное распределение катушек обмотки.
Чтобы выполнить эти условия, вначале выбирают предварительно зубцовое деление tz1, в зависимости от типа обмотки, номинального напряжения и полюсного деления машины. Для более равномерного распределения катушек обмотки по длине окружности зазора необходимо большое число пазов, а следовательно, маленькие зубцовые деления. В то же время ширина паза, составляющая примерно половину зубцового деления, не должна быть слишком малой, так как в этом случае ухудшается заполнение паза медью обмотки, а в машинах небольшой мощности может также недопустимо уменьшиться механическая прочность зубцов. Кроме того, надо иметь в виду, что стоимость машины с увеличением числа пазов возрастает, так как увеличиваются сложность штампа и трудоемкость изготовления и укладки обмоток.
Значения зубцовых делений статора асинхронных двигателей с обмоткой из круглого провода, необходимые для предварительного выбора числа пазов, приведены на рис. 9.26. Меньшие значения в каждой из показанных на рисунке областей возможных значений tz1 характерны для машин меньшей мощности для каждого из диапазонов высот осей вращения. Следует отметить, что двигатели с h ≥ 280 мм обычно выполняют с обмоткой из прямоугольного провода, но в многополюсном исполнении при 2р ≥ 10 (в двигателях с h = 280 и 315 мм) из-за малой высоты спинки статора размещение лобовых частей катушек из прямоугольного провода затруднено, поэтому такие машины выполняют с намоткой из круглого провода, имеющей мягкие, легко поддающиеся формовке лобовые части.
Для машин с обмоткой из прямоугольного провода при Uном ≤ 660 В и в высоковольтных машинах tz1 зависит от мощности и номинального напряжения и может быть взято в соответствии с данными табл. 9.11. В процессе расчета целесообразно не ограничиваться выбором какого-либо одного конкретного зубцового деления, а, руководствуясь приведенными выше соображениями, рассмотреть диапазон возможных значений tz1 в пределах указанных
значений зубцовых делений tz1min...tz2max. Тогда возможность числа пазов статора, соответствующих выбранному диапазону tz1,
 (9.16)
(9.16)

Рис. 9.26. Зубцовые деления статоров асинхронных
двигателей с обмоткой из круглого провода
с высотами оси вращения:
1 — h < 90 мм;
2 — 90 < h < 250 мм; 3 — h < 280 мм
Таблица9.11. Зубцовое деление статора fzi, м, при прямоугольных пазах
| Полюсное деление τ, м | Напряжение, В | ||
| до 660 | |||
| Менее 0,15 | 0,016—0,02 | 0,022—0,025 | 0,024—0,03 |
| 0,15—0,4 | 0,017—0,022 | 0,024—0,027 | 0,026—0,024 |
| Более 0,4 | 0,02—0,028 | 0,026—0,032 | 0,028—0,038 |
Окончательное число пазов статора Z1 следует выбирать в полученных пределах с учетом условий, налагаемых требованиями симметрии обмотки, и желательного для проектируемой машины значения числа пазов на полюс и фазу q1. Число пазов статора в любой обмотке асинхронных машин должно быть кратно числу фаз, а число q1 = Z1/(2pm) в большинстве асинхронных машин должно быть целым. Лишь в многополюсных асинхронных двигателях иногда выполняют такое число пазов, при котором q1 является дробным, причем большей частью со знаменателем дробности, равным двум, например q1 = 2 1/2 или 3 1/2. В отдельных случаях это правило может быть нарушено, однако необходимо иметь в виду, что обмотки с дробным q1 при сравнительно небольших числах пазов и полюсов, характерных для большинства асинхронных двигателей, приводят к некоторой асимметрии МДС. Поэтому выбор окончательного числа пазов следует проводить с четкой увязкой и контролем получаемого при этом числа q. Окончательное значение tz1 = πD/(2pmq) не должно выходить за указанные выше пределы более чем на 10 % и в любом случае для двигателей с h ≥ 56 мм не должно быть менее 6—7 мм.
При определении числа эффективных проводников в пазу uп руководствуются следующим: uп должно быть целым, а в двухслойной обмотке желательно, чтобы оно было кратным двум. Применение двухслойных обмоток с нечетным uп допускается лишь в исключительных случаях, так как это приводит к необходимости выполнять разновитковые катушки, что усложняет технологию изготовления и укладки обмотки. Поэтому полученные в расчете числа uп приходится округлять до ближайшего целого или четного числа. Чтобы это округление не было слишком грубым (что особенно заметно при малых uп), вначале определяют предварительное число эффективных проводников в пазу u'п при условии, что параллельные ветви в обмотке отсутствуют (а = 1):
u'п = πDA / I1ном Z1, (9.17)
где А — принятое ранее значение линейной нагрузки, А/м: I1ном — номинальный ток обмотки статора, А:
I1ном = Р2 / (mU1ном η cosφ) (9.18)
(η и cos φ заданы или выбраны в начале расчета).
Полученное по (9.17) значение u'п не округляют до целого, а находят такое число параллельных ветвей обмотки а, при котором число эффективных проводников в пазу либо будет полностью удовлетворять отмеченным условиям, либо потребует лишь незначительного изменения:
uп = а u'п. (9.19)
Число а при этом, естественно, может быть взято только из ряда возможных чисел параллельных ветвей для обмотки данного типа и заданного числа полюсов (см. гл. 3).
Полученное из (9.19) число округляют до ближайшего целого или четного в зависимости от типа обмотки.
Принятое на данном этапе расчета число параллельных ветвей а в дальнейшем при выборе размеров и числа элементарных проводников может быть изменено. В этом случае пропорционально изменяется также иuп
Окончательное число витков в фазе обмотки
w1 = Uп Z1/ (2am). (9.20)
Окончательное значение линейной нагрузки, А/м,
А = 2I1ном wi m / (πD). (9.21)
Оно, как правило, незначительно отличается от принятого ранее, так как его изменение определяется только отношением рассчитанного по (9.19) и принятого числа эффективных проводников в пазу uп Полученное значение А нужно сопоставить с рекомендуемым (.м.рис. 9.22— 9.24).
Схему обмотки статора выбирают в зависимости от мощности машины, ориентируясь на конструкцию и предполагаемую технологию укладки обмотки в пазы. Машины мощностью до 12.. .15 кВт в большинстве случаев имеют однослойную концентрическую обмотку из круглого провода. В машинах большей мощности обмотки выполняют двухслойными, а при механизированной укладке применяют одно-двухслойные или двухслойные концентрические обмотки, которые могут быть уложены в пазы без подъема шага. Все обмотки из прямоугольного провода выполняют только двухслойными, равнокатушечными.
Обмоточный коэффициент kоб = kp ky рассчитывают в зависимости от числа пазов на полюс и фазу q и укорочения шага обмотки β = yрасч / τ, где урaсч — расчетный шаг, определяемый по формулам, приведенным в § 3.6, в зависимости от типа обмотки.
В двухслойных обмотках асинхронных двигателей шаг выполняют в большинстве случаев с укорочением, близким к β = 0,8.
После расчета kоб1 уточняют значение потока Ф, Вб:
Ф =  (9.22)
(9.22)
и определяют индукцию в воздушном зазоре Вδ, Тл:
Вδ =  . (9.23)
. (9.23)
Если полученное значение Вδ выходит за пределы рекомендуемой области (см. рис. 9.22 — 9.24) более чем на ± 5 %, следует принять другое значение числа uп и повторить расчет.
Если линейная нагрузка и индукция в воздушном зазоре при принятом числе пазов и эффективных проводников в пазу находятся в рекомендуемых пределах, переходят к расчету сечения эффективного проводника и обмоточного провода.
Сечение эффективных проводников, м2, определяют, исходя из тока одной параллельной ветви и допустимой плотности тока в обмотке:
qэф1 = I1ном / (аJ1) . (9.24)
С точки зрения повышения использования активных материалов плотность тока J1 должна быть выбрана как можно большей, но при этом возрастают потери в меди обмотки. Увеличение потерь сказывается, во-первых, на повышении температуры обмотки и, во-вторых, на КПД двигателя. В асинхронных двигателях общего назначения при принятой в них системе косвенного охлаждения влияние плотности тока на нагрев обмотки более существенно, чем на КПД. На этом основании определены качественные зависимости допустимой плотности тока в обмотках различных машин. Она повышается с уменьшением габаритов машины, с увеличением допустимого нагрева обмотки при переходе на другой, более высокий класс нагревостойкости изоляции и с повышением интенсивности охлаждения (например, в машинах защищенного исполнения по сравнению с закрытыми обдуваемыми двигателями).
Нагрев пазовой части обмотки зависит от произведения линейной нагрузки на плотность тока (AJ). Поэтому выбор допустимой плотности тока производят с учетом линейной нагрузки двигателя:
J1 = (AJ) / A. (9.25)
Значения (AJ) для асинхронных двигателей различных исполнения и мощности приведены на рис. 9.27.
Для всыпных обмоток могут быть использованы обмоточные провода диаметром не более 1,8 мм, однако в современных двигателях для повышения надежности обмотки и упрощения ее укладки в пазы используют провода меньшего диаметра. В обмотках, предназначенных для механизированной укладки, диаметр изолированного провода обычно берут не более 1,4 мм, а при ручной укладке (двигатели с h > 160 мм) — не более 1,7 мм.
Если расчетное сечение эффективного проводника в машинах со всыпной обмоткой выше значений, соответствующих указанным диаметрам, то эффективный проводник делят на несколько элементарных. Для этого по табл. П 3.1 подбираются сечение qэл и число элементарных проводников nэл, составляющих один эффективный, таким образом, чтобы диаметр dэл элементарных проводников не выходил за указанные пределы, а их суммарная площадь сечения была близка к расчетному сечению эффективного проводника:
qэл nэл = qэф. (9.26)
В обмотках из круглого провода число элементарных проводников может быть взято до 8—10, но при большом nэл возрастают технологические трудности намотки катушек, поэтому в современных машинах стремятся уменьшить число элементарных проводников в одном эффективном до 6—8, для чего увеличивают число параллельных ветвей. В двухполюсных двигателях nэл увеличивают, поскольку число параллельных ветвей в них не может быть более двух.
При проектировании машин с обмоткой из прямоугольного провода сечение каждого проводника не должно быть взято более 17...20 мм2, так как в этом случае становится заметным возрастание потерь на вихревые токи.
Если расчетное значение qэф > 20 мм2, то прямоугольные проводники подразделяют на элементарные так, чтобы qэл ≤ 17...20 мм2.
В обмотках из прямоугольного провода, укладываемых в открытые пазы, nэл обычно не более 2. При nэл = 2 они располагаются на одном уровне по высоте паза (см. рис. 3.7). Обмотку с четырьмя элементарными проводниками (см. рис. 3.7, 6) в асинхронных двигателях применяют редко. Если обмотка выполняется из подразделенных катушек, которые укладывают в полуоткрытые пазы (см. рис. 3.6, б), то всегда образуются два элементарных проводники, так как катушки, расположенные на одной высоте в пазу, соединяются параллельно (см. § 3.2).

poznayka.org
Аппарат вертикальный с механическим перемешивающим устройством
Высоту корпуса аппарата находим, используя рис.1: h2=H- (Hэ+100), (3) где Нэ=0,25·D - высота эллиптической части крышки, 100 мм - размер, который примерно учитывает высоту цилиндрической отбортовки крышки и толщину фланца крышки...
Гидравлический расчет тарелок в верхней части колонны
Молярный расход пара по колонне: кг...
Конструирование простых винтовых устройств
Высота буртика определяется из условия прочности его на срез по плоскости «с-с» (рис. 3.2 а). . где [фср] = 20…25 Мпа для стали; Q=11 мм- осевое усилие; =(0.5…0.6)*Hг=0.6*25=15 мм-высота буртика гайки; =20 мм -наружный диаметр гайки. Тогда =11.67 МПа...
Нормирование точности детали вал, изделия - вал приводной
Номинальные линейные размеры (диаметры, длины, уступы, глубины, расстояния между осями и т.д.) деталей, их элементов и соединений должны назначаться из числа стандартных по ГОСТ 6636-69...
Обязательная сертификация Пускателя электромагнитного ПМЛ 1100
Испытание на воздействие смены температур. Для проверки изделий на воздействие смены температур применяют испытание 205 (метод 205-4) по ГОСТ 16962-71. Нижнее значение температур при испытании принимают минус 60°С. Верхнее значение температуры...
Определение конструктивных параметров аппаратов выпарных установок
H=4VC/(р*D2C)=4*1.81/3.14*12=2.31 м (25) 4.8 Скорость выхода пара из кипятильных труб щтр=W/ сП*f где f-суммарная площадь сечения кипятильных труб...
Проект ректификационной установки с тарельчатой колонной непрерывного действия
Молярный расход пара по колонне: кг...
Проектирование трехфазного асинхронного электродвигателя
мм...
Процессы и аппараты защиты окружающей среды. Расчет абсорбера
Найдем коэффициент массоотдачи, отнесенный к единице рабочей площади тарелки. По табл.24 m=0.80; n=0.33; А=0,019. Число Рейнольдса по формуле определяем по формуле: где -скорость газа в свободном сечении, м/с; - коэффициент динамической вязкости смеси...
Распределительный холодильник 2000 тонн г. Уссурийск
hгр =n•(hт•? +hп) , где n- число пакетов по высоте. hт- высота ящика. hп- высота плоского поддона(hп=0,15м) камера№1. hгр=hcтр-1=6-1=5м, h?гр=n•(0.3•3+0,15) n=4 ?=3 hгр=4•1.05=4.2м. камера№2. hгр=hк•n , где hк- высота контейнера, стоечного поддона...
Расчет электрической тали
, где - коэффициент...
Ректификационная тарельчатая колонна непрерывного действия
Исходные данные: , Графическое определение числа теоритических ступеней: Из диаграммы х, ус нанесенной на нее рабочей линией следует...
Ректификационная установка непрерывного действия
Нт = (n - 1) h = (26 - 1) 0,3 = 7,5м 3.3. Высота колонны. Н = Нт + Нс + Нк где Нс = 0,6 м - высота сепарационной части, Нк = 1,5 м - высота кубовой части колонны Н = 7,5 + 0,6 + 1,5 = 9,6 м...
Стабилизация газового конденсата АГКМ
На основе практических данных расстояние между верхним днищем колонны и ее верхней укрепляющей тарелкой принимается следующее: h2=1,2 м; высота секции питания h4=1...
Технологический расчет аппаратуры для выщелачивания руды с последующим разделением пульпы в сгустителе и нагревом жидкой фазы в теплообменнике
Сначала определим относительную плотность пульпы в зоне сгущения: , где - относительная плотность твердой фазы; n - отношение жидкого к твердому в зоне сгущения. Вычислим 1,31 Весовая концентрация пульпы в зоне сгущения: твердой фазы / кг пульпы...
prod.bobrodobro.ru
1 ЗАДАНИЕ НА ПРОЕКТИРОВАНИЕ. ВЫБОР ГЛАВНЫХ РАЗМЕРОВ И РАСЧЕТ ОБМОТКИ СТАТОРА
1.1 Техническое задание на курсовое учебное проектирование трехфазного асинхронного двигателя с короткозамкнутым ротором, имеющего конструктивное исполнение IM1001, исполнение по способу защиты от воздействия окружающей среды IP44, климатическое исполнение У3:
- мощность Р = 4,0 кВт;
- частота вращения n = 1000 об/мин;
- напряжение U = 380/220 В.
1.2 В качестве базовой модели выбираем конструкцию двигателей серии А4.
Таблица 1.1 Увязка мощности и высоты оси вращения двигателя серии 4А, исполнение по степени защиты IP44 (справочник /1/, стр. 315, табл. 9.1)
|
Мощность кВт |
Высота оси вращения, мм |
Условная длина сердечника, станины |
Число полюсов 2р |
|
4 |
132 |
В |
6 |
В соответствии с приведенной таблицей и рисунками 9.18 и 9.19 (справочник /1/, стр. 343), выберем расстояние от сердечника статора до опорной поверхности двигателя: h2 = 16 мм (h = 132 мм – высота оси вращения, определяемая исходя из мощности двигателя), станина двигателя литая.
По таблице 9.8 (справочник /1/, стр. 344) выбираем внешний диаметр статора Dа = 0,225 м.
1.3 Определим внутренний диаметр статора, пользуясь эмпирическими зависимостями
D = KDDa, (1.1)
где KD – коэффициент, зависящий от числа полюсов KD = 0,72 (табл. 9.9)
 м
м
1.4 Полюсное деление
 м
м
1.5 Тогда получим расчётную мощность
 ,
(1.2)
,
(1.2)
где kE = 0,96 (справочник /1/, стр. 345, рис. 9.20) – отношение ЭДС обмотки статора к номинальному напряжению;
h = 83 % (справочник /1/, стр. 345, рис. 9.21а) – КПД двигателя
cosj = 0,8 (справочник /1/, стр. 345, рис. 9.21а) – коэффициент мощности

1.6 Предварительный выбор электромагнитных нагрузок (справочник /1/, стр. 346, рис. 9.22, а)
Bd = 0,86 Тл
А = 28 103 А/м
1.7 Обмоточный коэффициент (предварительно) для однослойной обмотки выбираем (справочник /1/, стр. 348)
kоб1 = 0,96
1.8 Определим синхронную угловую частоту двигателя и расчётную длину магнитопровода и найдем отношение длины магнитопровода и полюсного деления, которое является критерием правильности выбора главных размеров

 ,
(1.3)
,
(1.3)


Значение λ находится в рекомендуемых пределах (справочник /1/, стр. 348, рис. 9.25, а), следовательно, выбор главных размеров двигателя произведен верно.
1.9 Конструктивная длина и длина стали сердечника статора в асинхронных двигателях, сердечники которых шихтуются в один пакет
l1 = lст1 = lδ= 0.082 м
Конструктивная длина и длина стали сердечника ротора в асинхронных двигателях
l2 = l1 = 0,082 м
1.10 Предельные значения зубцовых делений статоров t1


1.11 Число пазов статора


1.12 Число пазов статора в любой обмотке асинхронных машин должно быть кратно числу фаз, а число пазов на полюс и фазу q в большинстве АМ должно быть целым. Исходя из приведенных соображений, выбираем Z1 = 54, тогда

1.13 Зубцовое деление статора тогда составит

Окончательное значение зубцового деления не выходит из указанных пределов.
1.14 Число эффективных проводников в пазу (предварительно а = 1)
 , (1.4)
, (1.4)
где 

Принимаем а = 1, тогда
 , для дальнейших расчетов примем
, для дальнейших расчетов примем 
1.15 Окончательное определение числа витков в фазе обмотки, значения линейной нагрузки, а также значений потока и индукции в воздушном зазоре
 витка
витка

 ,
(1.5)
,
(1.5)
где kоб1 = kр1Ку = 0,96 (для q = 3 по спр. /1/, стр. 112, табл. 3.16)
Ку = 1 – коэффициент укорочения для однослойных обмоток


Полученное значение индукции в воздушном зазоре (4,71% от принятого в п. 1.6) и линейной нагрузки (3,76% от принятого в п. 1.6) не выходит за пределы рекомендуемой области.
1.16 Плотность тока в обмотке
статора (предварительно), при этом произведение линейной нагрузки на плотность
тока производим по рисунку 9,27,а (спр. /1/, стр. 355): 

1.17 Сечение эффективного проводника (предварительно)

Укладка обмоток выбрана автоматизированная, поэтому минимальный диаметр обмоточного провода должен составлять не более 1,4 мм, по приведенным выше расчетам диаметр составил 1,36 мм, что удовлетворяет данным условиям.
1.18 В качестве обмоточного провода по справочнику /1/, стр. 713, табл. П3.1 выбираем круглый медный эмалированный провод марки ПЭТВ
Табл. 1.2 Справочные данные выбранного обмоточного провода
|
Номинальный диаметр неизолированного провода |
Среднее значение диаметра изолированного провода |
Площадь поперечного сечения неизолированного провода |
|
1,4 мм |
1,485 мм |
1,539 мм2 |
2 РАСЧЕТ РАЗМЕРОВ ЗУБЦОВОЙ ЗОНЫ СТАТОРА
Паз статора определяем по рис. 9.29, а (справочник /1/, стр. 361) соотношением размеров, обеспечивающих параллельность боковых граней зубцов.
2.1 Принимаем предварительно по табл. 9.12: Ba = 1,4 Тл; BZ1 = 1,6 Тл, тогда

где kС = 0,97 – коэффициент заполнения сердечника сталью, для оксидированных листов электротехнической стали 2013 (табл. 9.13)
В большинстве современных асинхронных двигателях, выпускаемых отечественной промышленностью выполняют трапецеидальные пазы. Угол наклона грани клиновой части у двигателей с h < 250 мм обычно β = 45°. Сердечники шихтуются в один пакет и тогда l1 = lCT1 = lδ. Высота ярма статора составит

2.2 Размеры паза в штампе (см. рисунок 9,29, а):
В машинах с однослойной обмоткой, в которых укладка автоматизирована ширину шлица паза выбирают из соображения bш = dиз + (1,8…2,3) = 1,485 + 1,8 =3,285 мм, hш = 0,5, при h = 132 мм.



Размеры паза «в свету» определяют
с учетом припусков на шихтовку сердечников определяемых по справочнику /1/,
стр. 360, табл. 9.14: 

 |
2.2 Размеры паза в свету с учётом припуска на сборку



2.3 Площадь поперечного сечения паза для размещения проводников обмотки, где односторонняя толщина изоляции в пазу по табл. 3-8: bиз = 0,25 мм.
 ,
(2.1)
,
(2.1)
где Sпр = 0 мм2 – площадь поперечного сечения прокладок,
Sиз – площадь поперечного сечения корпусной изоляции


2.4 Коэффициент заполнения паза

Полученное значение коэффициента заполнения паза допустимо
vunivere.ru
Cтраница 1
Высота оси вращения ( предварительно) по рис. 6 - 7, а Л150 мм. [1]
Высоты оси вращения 125, 140, 236 мм допускается применять только в технически обоснованных случаях, а высоту оси вращения 6DO мм - только для машин, разрабатываемых на базе существующих серий. [2]
Высота оси вращения для всех машин серий СДН2 и СДНЗ-2 равна 630 мм, а для машин серии СД2 ( СГ2) - 450 мм у машин 13-го габарита и 500 мм у машин 14-го габарита. [4]
Высоты осей вращения для машин IP44 - 160 - 250 мм, для машин IP23 - 160 - 335 мм. Статоры машин унифицированы с двигателями основного исполнения. Роторы имеют всыпную двухслойную петлевую обмотку при Н 160 - 200 мм; для машин большей мощности ( Н 225 - 355 мм) - стержневую двухслойную обмотку. Обмотка ротора соединяется в звезду, ее концы присоединяются к контактным кольцам. Буква К в обозначении означает наличие фазного ротора с контактными кольцами. [6]
Высота оси вращения А указана в типоразмере двигателя. [7]
Высота оси вращения ( предварительно) порис. [8]
Высота оси вращения для всех машин серий СДН2 и СДНЗ-2 равна 630 мм, а для машин серии СД2 ( СГ2) - 450 мм у машин 13-го габарита и 500 мм у машин 14-го габарита. [10]
Высоты осей вращения электрических машин согласно ГОСТ 13267 - 73 должны соответствовать следующему ряду: 25, 28, 32, 36, 40, 45, 50, 56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355, 400, 450, 500, 560, 630, 710, 800, 900, 1000 мм. [12]
Высоты оси вращения электрических машин нормализованы ( см. гл. Поэтому может оказаться необходимым скорректировать выбранные по расчету оптимальные значения наружного диаметра сердечника DHi. Представляет интерес расчетное исследование на ЭВМ влияния отклонений от оптимальных значений наружных диаметров сердечника статора ( на 20 %) на обобщенную стоимость С. [13]
Высоты оси вращения электрических машин нормализованы см. гл. Представляет интерес расчетное исследование на ЭВМ влияния отклонений от оптимальных значений наружных диаметров сердечника статора ( на 20 %) на обобщенную стоимость С. [14]
Высоту оси вращения предварительно определяют по рис. 6 - 7, а или б для заданных Р2 и 2р в зависимости от исполнения двигателя. [15]
Страницы: 1 2 3 4
www.ngpedia.ru
73
Глава первая
СЕРИИ АСИНХРОННЫХ МАШИН
В 1946—1949 гг. была создана первая в мировой практике единая серия асинхронных двигателей общего назначения, объединенных общими конструктивными решениями, общей технологией, с широкой унификацией различных узлов и деталей и основанной на единых шкалах мощностей, габаритных, присоединительных и установочных размеров. Эта серия, заменившая восемь существовавших ранее, была названа единой серией А. Она охватывала диапазон мощностей от 0,6 до 100 кВт. Двигатели имели два основных исполнения по способу защиты от воздействия окружающей среды: защищенное (обозначение А) и закрытое обдуваемое (обозначение АО).
Появление новых электроизоляционных материалов и успехи в изучении электромагнитных и тепловых процессов в электрических машинах позволили в 1957—1959 гг. создать новую единую серию асинхронных двигателей того же диапазона мощностей — серию А2, значительно превосходящую первую серию А по своим технико-экономическим и массогабаритным показателям. Эта серия также имела два основных исполнения: защищенное А2 и закрытое обдуваемое АО2.
В 1952— 1956 гг. была разработана единая серия двигателей мощностью от 100 до 1000 кВт, названная серией А—АК (асинхронные двигатели с короткозамкнутыми и фазными роторами). В последующие годы модернизированные отрезки этой серии получили наименование серии A3.
Следующая серия 4А была спроектирована в 1969—1971 гг. Она базируется на рекомендациях МЭК по шкале мощностей и установочных размеров и на рекомендациях СЭВ по увязке мощностей и установочных размеров.
В основу построения серии положены не габаритные диаметры сердечников статора, как в прежних сериях, а высоты оси вращения h, т. е. расстояния от оси вращения ротора до установочной поверхности.
В табл. (1.1)—(1.4) приведены данные по увязке мощностей с высотой оси вращения асинхронных двигателей, выпускаемых нашей промышленностью в настоящее время.
Серия 4А охватывает диапазон мощностей от 0,06 до 400 кВт и выполнена на 17 стандартных высотах оси вращения (шкала высот оси вращения приведена в табл. П.39). На каждой из высот, кроме h=225 мм, выпускаются двигатели двух разных длин, различные по мощности. С высотой оси вращения h=225 мм выпускают двигатели только одной длины. Таким образом, шкала мощностей серии содержит 33 ступени.
Коэффициент нарастания мощностей меняется от 1,5—1,4 у двигателей с высотами оси вращения h=5080 мм до 1,25—1,2 у двигателей с h=280355мм.
В серии приняты следующие обозначения двигателей:
4А0102030004050607008:
4— Порядковый номер серии (четвертая)
А— Род двигателя (асинхронный)
01– Исполнение по способу защиты от окружающей среды: буква Н - защищенное, отсутствие знака - закрытое обдуваемое исполнение
02– Исполнение ротора двигателя: буква К - ротор фазный, отсутствие знака - ротор короткозамкнутый
03– Исполнение двигателя по материалу станины и щитов: А - станина и щиты алюминиевые; Х - станина и щиты алюминиевые или чугунные в любом сочетании материалов; отсутствие знака - станина и щиты чугунные или стальные
0004– Высота оси вращения, мм (две или три цифры)
05— Установочный размер по длине станины S , Н или L (меньший, средний или больший)
06— Длина сердечника А (меньшая) или В (большая) при определенном установочном размере; отсутствие знака означает, что при данном установочном размере (S , М или L) выполняются сердечники только одной длины
07– Число полисов (одна или две цифры)
008— Климатическое исполнение и категория размещения (по ГОСТ 15150-69)
Примеры обозначения двигателей
4А180М4У3 — асинхронный двигатель 4-й серии, закрытого обдуваемого исполнения с короткозамкнутым ротором, с чугунными станиной и щитами, высотой оси вращения h=180 мм, средним (M) установочным размером по длине станины, четырехполюсный, климатического исполнения У, категории размещения 3
4АН315S10У3 — асинхронный двигатель 4-й серии защищенного исполнения с короткозамкнутым ротором, стальными станиной и щитами, высотой оси вращения 315 мм, со средним (S) установочным размером, десятиполюсный, климатического исполнения У и категории размещения 3
4АНК315510УЗ — то же, что в предыдущем примере, но двигатель с фазным ротором
4А315S10УЗ — то же, что и ранее, но двигатель закрытого обдуваемого исполнения с короткозамкнутым ротором.
Таблица 1.1
Увязка мощностей с высотой оси вращения для низковольтных асинхронных двигателей (серия 4А) исполнения IP44
| Высота оси вращения h, мм | Обозначение длины | Мощность,кВт,при числе полюсов 2p | |||||
| 2 | 4 | 6 | 8 | 10 | 12 | ||
| 56 | — | 0,18; | 0,12; | — | — | — | — |
| 0,25 | 0,18 | ||||||
| 63 | — | 0,37; | 0,25; | 0,18; | — | — | — |
| 0,55 | 0,37 | 0,25 | |||||
| 71 | — | 0,75; | 0,55; | 0,37; | 0,25 | — | — |
| 1,1 | 0,75 | 0,55 | |||||
| 80 | — | 1,5; | 1,1; | 0,75; | 0,37; | — | — |
| 2,2 | 1,5 | 1,1 | 0,55 | ||||
| 90 | L | 3,0 | 2,2 | 1,5 | 0,75; | — | — |
| 1,1 | |||||||
| 100 | S | 4,0 | 3,0 | — | — | — | — |
| L | 5,5 | 4,0 | 2,2 | 1,5 | — | — | |
| 112 | M | 7,5 | 5,5 | 3,0; | 2,2; | — | — |
| 4,0 | 3,0 | ||||||
| 132 | S | — | 7,5 | 5,5 | 4,0 | — | — |
| M | 11 | 11 | 7,5 | 5,5 | — | — | |
| 160 | S | 15 | 15 | 11 | 7,5 | — | — |
| M | 18,5 | 18,5 | 15 | 11 | — | — | |
| 180 | S | 22 | 22 | — | — | — | — |
| M | 30 | 30 | 18,5 | 15 | — | — | |
| 200 | M | 37 | 37 | 22 | 18,5 | — | — |
| L | 45 | 45 | 30 | 22 | — | — | |
| 225 | M | 55 | 55 | 37 | 110 | — | — |
| 250 | S | 75 | 75 | 45 | 132 | — | — |
| M | 90 | 90 | 55 | 160 | — | — | |
| 280 | S | 110 | 110 | 75 | 55 | — | — |
| M | 132 | 132 | 90 | 75 | — | — | |
| 315 | S | 160 | 160 | 110 | 90 | 55 | 45 |
| M | 200 | 200 | 132 | 110 | 75 | 55 | |
| 355 | S | 250 | 250 | 160 | 132 | 90 | 75 |
| M | 315 | 315 | 200 | 160 | 110 | 90 | |
Таблица 1.2
Увязка мощностей с высотой оси вращения для низковольтных асинхронных двигателей (серия 4А) исполнения IP23
| Высота оси вращения h, мм | Обозначение длины | Мощность,кВт,при числе полюсов 2p | |||||||||||
| 2 | 4 | 6 | 8 | 10 | 12 | ||||||||
| 160 | S | 22 | 18,5 | 11 | 7,5 | — | — | ||||||
| M | 30 | 22 | 15 | 11 | — | — | |||||||
| 180 | S | 37 | 30 | 18,5 | 15 | — | — | ||||||
| M | 45 | 37 | 22 | 18,5 | — | — | |||||||
| 200 | M | 55 | 45 | 30 | 22 | — | — | ||||||
| L | 75 | 55 | 37 | 30 | — | — | |||||||
| 225 | M | 90 | 75 | 45 | 37 | — | — | ||||||
| 250 | S | 110 | 90 | 55 | 45 | — | — | ||||||
| M | 132 | 110 | 75 | 55 | — | — | |||||||
| 280 | S | 160 | 132 | 90 | 75 | — | — | ||||||
| M | 200 | 160 | 110 | 90 | — | — | |||||||
| 315 | S | — | 200 | 132 | 110 | 75 | 55 | ||||||
| M | 250 | 250 | 160 | 132 | 90 | 75 | |||||||
| 355 | S | 315 | 315 | 200 | 160 | 110 | 90 | ||||||
| M | 400 | 400 | 250 | 200 | 132 | 110 | |||||||
Закрытые обдуваемые двигатели выпускаются в диапазоне высот оси вращения от 50 до 355 мм; двигатели защищенного исполнения — в диапазоне высот от 160 до 355 мм. В двигателях этой серии несколько увеличен объем активной части за счет увеличения наружного диаметра сердечника статора при той же высоте оси вращения, одновременное применение изоляции класса нагревостойкости F и новых сортов электротехнической стали (серия рассчитана на стали 2013 и 2312) дало возможность повысить электромагнитные нагрузки. Это позволило увеличить мощность двигателей при тех же высотах оси вращения.
Таблица 1.3
Увязка мощностей с высотой вращения для асинхронных двигателей серии А3 низкого напряжения мощностью свыше 100 кВт
| Высота оси вращения h,мм | Обозначение длины | Мощность,кВт | |||||||||||
| Степень защиты IP23 | Степень защиты IP44 | ||||||||||||
| Ротор короткозамкнутый | Ротор короткозамкнутый и фазный | Ротор короткозамкнутый | |||||||||||
| 2p=2 | 4 | 6 | 8 | 10 | 12 | 2 | 4 | 6 | 8 | 10 | 12 | ||
| 315 | S | 160 | 132; | 110 | 90 | 55 | 45 | 132 | 132 | 90 | 75 | 45 | 37 |
| 160 | |||||||||||||
| M | 200 | 200 | 132 | 110 | 75 | 55 | 160 | 160 | 110 | 90 | 55 | 45 | |
| 355 | S | 250 | 250 | 160 | 132 | 90 | 75 | 200 | 200 | 132 | 110 | 75 | 55 |
| M | 315 | 315 | 200 | 160 | 110 | 90 | 250 | 250 | 160 | 132 | 90 | 75 | |
| 400 | S | 400 | 400 | 250 | 200 | 132 | 110 | 315 | 315 | 200 | 160 | 110 | 90 |
| M | 500 | 500 | 315 | 250 | 160 | 132 | 400 | 400 | 250 | 200 | 132 | 110 | |
Таблица 1.5
Группы конструктивного исполнения асинхронных двигателей серии 4А и способы защиты от воздействия окружающей среды
| Степень защиты двигателей от воздействия окружающей среды (по ГОСТ 17494-72) | Высота оси вращения, мм | Группы конструктивного исполнения двигателей по СТ СЭВ 246-76 |
| IP23 | 160-355 | IMI* |
| 50-250 | IM1, IM2, IM3 | |
| IP44 | 280 | IM1*, IM2* |
| IM3** | ||
| 315-355 | IM1*, IM2* |
* По способу монтажа только с горизонтальным расположением вала.
** По способу монтажа только с вертикальным расположением вала.
Двигатели выполняются на следующие номинальные напряжения: 220/380 В — при мощностях от 0,06 до 0,37 кВт, 220/380 и 380/660 В — при мощностях от 0,55 до 110 кВт, 380/660 В — при мощностях более 132 кВт. Исполнение двигателей по степени защиты от воздействия окружающей среды и способу монтажа в зависимости от высоты оси вращения соответствует указанному в табл. 1.5.
Двигатели с высотами оси вращения 50 и 63 мм (мощность 0,06—0,37 кВт) выполняются с литыми алюминиевыми станинами и подшипниковыми щитами. Более мощные двигатели выполняются с литыми чугунными станиной и щитами, а двигатели 4АН с h280 мм (мощностью 132 кВт и больше) — со стальной сварной станиной и литыми чугунными щитами
В статорах всех двигателей с h160 мм выполняют однослойную обмотку. В остальных двигателях всей серии обмотки двухслойные.
Во всех двигателях с h250 мм и в двигателях с 2р10 при h280 мм обмотка статора выполняется из круглого обмоточного провода. В двигателях h280 мм при 2р8 обмотка полужесткая из прямоугольного провода, укладываемая в полуоткрытые пазы.
studfiles.net