





АД, в которых предусмотрена возможность изменять число пар полюсов р1 называются полюсопереключаемыми или многоскоростными. Обычно они выпускаются на 2, 3 или на 4 скорости вращения, причем двухскоростные АД изготовляются с одной обмоткой на статоре и с переключением полюсов в отношении 2:1, трехскоростные — с двумя обмотками на статоре, одна из которых выполняется с переключением, четырехскоростные — с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1.
Например, двигатель на частоту:

с синхронными скоростями вращения 1500/1000/750/500 имеет одну обмотку с переключением на 2р = 4 и 8 и другую обмотку с переключением на 2р = 6 и 12 полюсов.
Каждая фаза обмотки статора многоскоростного АД состоит из двух одинаковых частей (полуобмоток), которые включаются различным образом. Большая скорость получается при меньшем числе полюсов.Принципиальная схема соединения полуобмоток одной фазы статора при переключении числа пар полюсов в отношении 2:1 показана на рис.1 (а и б). Полуобмотки сдвинуты в пространстве друг относительно друга на 180°. При соединении полуобмоток, как показано на рис.1 (а) обмотка образует 4 полюса и синхронная скорость равна 1500 об/мин. Если одну полуобмотку переключить таким образом, чтобы направление тока в ней изменилось на обратное (рис.1, б), то обмотка будет создавать два полюса и синхронная скорость составит n1 = 3000 об/мин, т.е. увеличится вдвое.

Рис.1 - Принципиальная схема соединения полуобмоток фазы статора при переключении числа пар полюсов
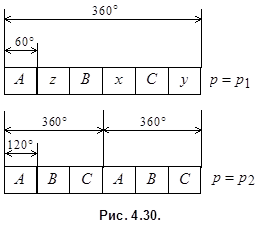
Механические характеристики АД при различных числах полюсов приведены на рис.2.

Рис. 2 - Механические характеристики АД при различном числе полюсов
Поскольку при рассмотренном переключении обмотки статора напряжение фазы не изменяется, то вращающий момент при уменьшении числа пар полюсов уменьшается, так как :

Применяются и другие схемы переключения числа пар полюсов АД. Вес и стоимость многоскоростных АД несколько больше, чем односкоростных той же мощности и допускают они только ступенчатое изменение скорости. Тем не менее это широко применяемый способ регулирования скорости короткозамкнутых АД в том числе и в судовых условиях.
www.radioingener.ru
Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором.
Из выражения nо = 60f/р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения nо магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
Существует два способа изменения числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.

Рис. 7. Схемы переключения обмоток асинхронного двигателя: а - с одинарной звезды на двойную; б - с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором.
Регулирование частоты вращения асинхронных электродвигателей изменением напряжения на его статоре.
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя, позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U1ном и статором электродвигателя включаетсярегулятор напряжения.
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент Мкр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения Uрет (рис. 3), а скольжение отUрег не зависит.

Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора

Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре

Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс>Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до nкр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.

Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения - асинхронный двигатель (ТРН - АД)
Замкнутая схема управления асинхронным двигателем, выполненным по схеме тиристорный регулятор напряжения -электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках)
Дата добавления: 2018-02-15; просмотров: 31; ЗАКАЗАТЬ РАБОТУ
studopedia.net
Этот способ регулирования в отличие от предыдущего позволяет осуществить изменение частоты вращения только ступенями. Он используется в таких механизмах, как воздуходувки, транспортеры, подъемники, лифты. Двигатели с переключением числа пар полюсов называют многоскоростными. Обычно многоскоростные асинхронные двигатели выполняются с двумя, тремя и четырьмя ступенями скоростей. Двухскоростные двигатели изготавливаются с одной обмоткой, если числа пар полюсов соответствуют следующему отношению:
 .
.
Трех- и четырехскоростные двигатели выпускаются с двумя обмотками. В трехскоростных двигателях только одна обмотка выполняется с переключением числа пар полюсов , а в четырехскоростных обе обмотки выполняются как двухскоростные. Обмотка ротора многоскоростных двигателей выполняется короткозамкнутой. Для нее не требуется переключения схемы соединения, так как необходимое число пар полюсов обмотки ротора образуется автоматически полем статора.
Изменение числа полюсов осуществляется путем изменения схемы соединения секций обмотки статора. На рис. 4.29 показаны три варианта соединения секций.
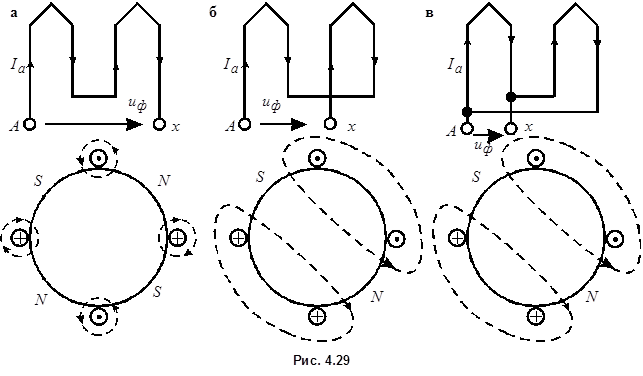 |
Вариант «а» соответствует последовательному согласному включению секций, при этом образуется магнитное поле с  полюсами. В варианте «б» вторая секция включается встречно-последовательно. Результирующее поле имеет
полюсами. В варианте «б» вторая секция включается встречно-последовательно. Результирующее поле имеет  полюса. Мощность обмотки остается неизменной,
полюса. Мощность обмотки остается неизменной,  , а момент, развиваемый двигателем, снижается в два раза,
, а момент, развиваемый двигателем, снижается в два раза,  . В варианте «в» вторая секция включается встречно-параллельно. Результирующее поле также будет иметь полюса, но мощность обмотки
. В варианте «в» вторая секция включается встречно-параллельно. Результирующее поле также будет иметь полюса, но мощность обмотки  возрастает в два раза, а момент двигателя остается постоянным
возрастает в два раза, а момент двигателя остается постоянным 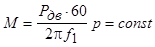 .
.
 |
Таким образом, для изменения числа пар полюсов в отношении  необходимо, чтобы каждая фаза обмотки состояла из двух одинаковых частей. Когда обе части обтекаются токами одинакового направления, число полюсов
необходимо, чтобы каждая фаза обмотки состояла из двух одинаковых частей. Когда обе части обтекаются токами одинакового направления, число полюсов  , при изменении направления тока в одной из них число полюсов уменьшается вдвое,
, при изменении направления тока в одной из них число полюсов уменьшается вдвое,  . При переключении числа полюсов с
. При переключении числа полюсов с  на
на  полюсное деление уменьшается в два раза, при этом величина фазной зоны трехфазной обмотки меняется с 60° на 120° (рис. 4.30).
полюсное деление уменьшается в два раза, при этом величина фазной зоны трехфазной обмотки меняется с 60° на 120° (рис. 4.30).
Так как чередование фаз для обеих скоростей должно оставаться одинаковым, то кроме изменения направления токов в зонах  необходимо поменять местами две фазы обмотки. При большем числе полюсов обмотка выполняется с диаметральным шагом
необходимо поменять местами две фазы обмотки. При большем числе полюсов обмотка выполняется с диаметральным шагом  . Тогда при меньшем числе полюсов
. Тогда при меньшем числе полюсов  .
.
Малый шаг приводит к ухудшению использования обмотки и, следовательно, к некоторому снижению технико-экономических показателей двигателя.
Многоскоростные двигатели проектируются для различных режимов работы. Наиболее часто встречаются режимы с постоянным моментом  и с постоянной мощностью
и с постоянной мощностью  . Регулирование частоты вращения с постоянным моментом обеспечивается при переключении обмотки со звезды на схему двойной звезды (рис. 4.31).
. Регулирование частоты вращения с постоянным моментом обеспечивается при переключении обмотки со звезды на схему двойной звезды (рис. 4.31).
При таком переключении в два раза возрастает потребляемый из сети ток, а следовательно, и мощность двигателя  , момент же при этом не меняется.
, момент же при этом не меняется.
 |
Если до переключения обмотка статора была соединена в треугольник (рис. 4.32), то после переключения ее на двойную звезду мощность двигателя практически не изменится, а момент уменьшится в два раза из-за увеличения частоты вращения.
 |
www.poznayka.org
Cтраница 1
Число пар полюсов статора всегда равно числу пар полюсов ротора. [1]
Если числа пар полюсов статора и ротора равны, а скорости вращения полей одинаковы ( синхронный режим), то возникает постоянное электромагнитное притяжение разноименных полюсов статора и ротора ( рис. 4 - 2), что вызывает появление электромагнитного момента. Этот момент, называемый синхронным, в среднем равен нулю, если скорость ротора отлична от синхронной. Поэтому синхронный двигатель только с постоянными магнитами не имеет пускового момента. [3]
При числе пар полюсов статора, большем единицы, такой процесс повторяется / раз. [4]
Синхронная скорость поля сос определяется частотой питающей сети и числом пар полюсов статоров машины. Предполагается, что источник питания один, а число пар полюсов для трех статоров одно и то же. [5]
В качестве разгонного двигателя используется асинхронный двигатель на то же число пар полюсов статора, что и синхронный, или двигатель постоянного тока. [6]
Отсюда следует, что номинальную скорость асинхронного двигателя можно изменять путем изменения числа пар полюсов статора. Двигатели, в которых применяется такой способ изменения числа оборотов, называют многоскоростными. [7]
На рис. 10.5, а изображена развернутая схема однослойной обмотки четырехполюсного статора ( число пар полюсов статора р2), на которой секции условно изображены одним витком. На схеме три фазные обмотки: А-X, В-Y, С-Z, каждая состоит из двух последовательно соединенных катушечных групп, в группах - по две секции. [8]
Число оборотов магнитного поля в минуту определяется по формуле: п - -, где Р - число пар полюсов статора, / - частота тока. [10]
Так как скорость вращения потока определяет в основном и число оборотов ротора асинхронного двигателя [ см. формулу ( 187) ], приходим к заключению, что число оборотов асинхронного двигателя при данной частоте переменного тока почти точно обратно пропорционально числу пар полюсов статора. [11]
Трехфазная обмотка статора генератора переменного тока выполняется аналогично статорной обмотке асинхронного двигателя. Число пар полюсов статора всегда равно числу пар полюсов ротора. [12]
Если муфта возбуждается постоянным магнитом, то момент регулируют изменением воздушного зазора, если же на статоре имеется обмотка, то варьируют ток возбуждения. Дшмепт муфгы про порционален числу пар полюсов статора, объему гистерезисного слоя ротора и удельным потерям в нем за цикл перемагничивания. Величина момента практически не зависит от скорости ротора. [14]
При роторном бурении частота вращения долота равна частоте вращения ротора и может быть измерена тахометром любой конструкции или определена по кинематике привода ротора. В электробурах используются асинхронные двигатели с короткозамкнутым ротором, частота вращения которых зависит от частоты тока питания и числа пар полюсов статора. Поэтому частота вращения долота оценивается по характеристике электродвигателя. [15]
Страницы: 1
www.ngpedia.ru






