Конденсаторное торможение асинхронных двигателей малой мощности и комбинированные способы торможения с его использованием в последние годы получили значительное распространение. С точки зрения быстроты остановки, сокращения тормозного пути и повышения точности конденсаторное торможение часто дает лучшие, результаты, чем другие способы торможения электродвигателей.
Конденсаторное торможение основано на использовании явления самовозбуждения асинхронной машины, или, что более правильно, емкостного возбуждения асинхронной машины, поскольку необходимая для возбуждения генераторного режима реактивная энергия доставляется подключенными к статорной обмотке конденсаторами. В этом режиме машина работает с отрицательным по отношению к вращающемуся магнитному полю, созданному возбужденными в статорной обмотке свободными токами, скольжением, развивая на валу тормозной момент. В отличие от динамического и рекуперативного оно не требует потребления возбуждающей энергии из сети.

На рисунке приведена схема включения двигателя при конденсаторном торможении. Параллельно обмотке статора включают конденсаторы, обычно соединенные по схеме треугольника.
При отключении двигателя от сети токи разряда конденсаторов создают магнитное поле, вращающееся с низкой угловой скоростью. Машина переходит в режим генераторного торможения, частота вращения снижается до значения, соответствующего частоте вращения возбужденного поля. Во время разряда конденсаторов появляется большой тормозной момент, который с уменьшением частоты вращения падает.
В начале торможения происходит быстрое поглощение запасенной ротором кинетической энергии при малом тормозном пути. Торможение резкое, ударные моменты достигают 7 Мном. Значение пика тормозного тока при самых больших значениях емкости не превышает пускового тока.
С ростом емкости конденсаторов тормозной момент увеличивается и торможение длится до более низкой частоты вращения. Исследования показали, что оптимальное значение емкости лежит в пределах 4 - 6 Сном. Конденсаторное торможение прекращается при частоте вращения 30 - 40% номинальной, когда частота вращения ротора становится равной частоте вращения поля статора от возникающих в статоре свободных токов. При этом в процессе торможения поглощается более 3/4 кинетической энергии, запасенной приводом.
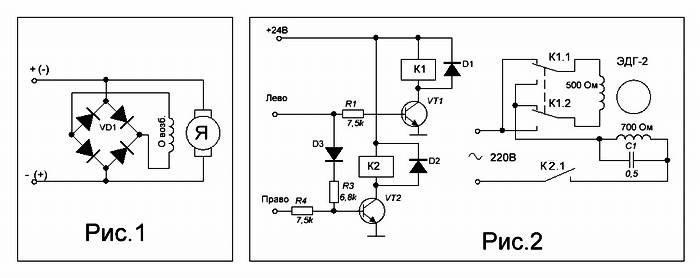
Для полной остановки двигателя по схеме на рисунке 1,а необходимо наличие на валу момента сопротивления. Описанная схема выгодно отличается отсутствием переключающих аппаратов, простотой обслуживания, надежностью и экономичностью.
При глухом подключении конденсаторов параллельно двигателю можно применять только такие типы конденсаторов, которые рассчитаны на длительную работу в цепи переменного тока.
Если торможение осуществляется по схеме рисунке 1 с подключением конденсаторов после отключения двигателя от сети, возможно применение более дешевых и малогабаритных металлобумажных конденсаторов типов МБГП и МБГО, предназначенных для работы в цепях постоянного и пульсирующего тока, а также сухих полярных электролитических конденсаторов (КЭ, КЭГ и др.).
Конденсаторное торможение с глухо подключенными по схеме треугольника конденсаторами целесообразно применять для быстрой и точной остановки электроприводов, на валу которых действует момент нагрузки не менее 25% номинального момента двигателя.
Для конденсаторного торможения может быть применена и упрощенная схема: однофазное включение конденсаторов (рис. 1,6). Для получения такого же тормозного эффекта, как при трехфазном включении емкости, необходимо, чтобы емкость конденсатора в однофазной схеме была в 2,1 раза больше емкости в каждой фазе в схеме на рис. 1,а. При этом, однако, емкость в однофазной схеме составляет лишь 70% суммарной емкости конденсаторов при их трехфазном включении.
Потери энергии в двигателе при конденсаторном торможении наименьшие по сравнению с другими видами торможения, поэтому оно рекомендуется для электроприводов с большим числом включений.
При выборе аппаратуры следует учесть, что контакторы в цепи статора должны быть рассчитаны на ток, протекающий по конденсаторам. Для устранения недостатка конденсаторного торможения — прекращения действия до полной остановки электродвигателя — используют его сочетания с динамическим имагнитным торможением.

Две основные схемы конденсаторно-динамического торможения (КДТ) показаны на рисунке 2.
В схеме постоянный ток подают в статор после прекращения действия конденсаторного торможения. Эта схема рекомендуется для точной остановки электропривода. Подачу постоянного тока следует производить в функции пути механизма. При сниженной частоте вращения момент динамического торможения значителен, что и обеспечивает быстрое окончательное затормаживание двигателя.
Эффективность такого двухступенчатого торможение видна из следующего примера.
При динамическом торможении двигателя АЛ41-4 (1,7 кВт, 1440 об/мин) с внешним моментом инерции на валу, составляющим 22% момента инерции ротора, время торможения равно 0,6 с, а тормозной путь 11,5 оборота вала.
При совмещении конденсаторного и динамического торможения время и путь торможения сокращаются до 0,16 с и 1,6 оборота вала (емкость конденсаторов была принята равной 3,9 Сном).
В схеме рис. 2,6 осуществляется перекрытие режимов с подачей постоянного тока до окончания процесса конденсаторного торможения. Для управления вторым этапом служит реле напряжения РН.
Конденсаторно-динамическое торможение по схеме рис. 2,6 позволяет снизить время и путь торможения в 4 - 5 раз по сравнению с конденсаторно-динамическим торможением по схеме рис. 1,а. Однако отклонения времени и пути от их сред них значений при последовательном действии режимов конденсаторного и динамического торможения в 2 - 3 раза, меньше, чем в схеме с перекрытием режимов.
12 июля 2011 в 08:56 4787
14 ноября 2012 в 10:00 3894
27 февраля 2013 в 10:00 2261
21 июля 2011 в 10:00 2184
29 февраля 2012 в 10:00 1852
24 мая 2017 в 10:00 1632
16 августа 2012 в 16:00 1593
28 ноября 2011 в 10:00 1361
31 января 2012 в 10:00 1301
20 июля 2012 в 10:00 1108
energoboard.ru
После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
Такая остановка электродвигателя при движении по инерции называется свободным выбегом. Многие электродвигатели, работающие в продолжительном режиме или со значительными нагрузками, останавливают путем свободного выбега.
В тех же случаях, когда продолжительность свободного выбега значительна и оказывает влияние на производительность электродвигателя (работа с частыми пусками), для сокращения времени остановки применяют искусственный метод преобразования кинетической энергии, запасенной в движущейся системе, называемый торможением.
Все способы торможения электродвигателей можно разделить на два основных вида: механическое и электрическое.
 При механическом торможении кинетическая энергия преобразуется в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При механическом торможении кинетическая энергия преобразуется в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При электрическом торможении кинетическая энергия преобразуется в электрическую и в зависимости от способа торможения двигателя либо отдается в сеть, либо преобразуется в тепловую энергию, идущую на нагрев обмоток двигателя и реостатов.
Наиболее совершенными считают такие схемы торможения, при которых механические напряжения в элементах электродвигателя незначительны
Схемы динамического торможения асинхронных двигателей
Для управления моментом при динамическом торможении асинхронным двигателем с фазным ротором по программе с заданием времени используются узлы схем, приведенные на рис. 1, из которых схема рис. 1, а применяется при наличии сети постоянного тока, а схема рис. 1, б — при отсутствии ее.
В качестве тормозных резисторов в роторе используются пусковые резисторы R1, включение которых в режиме динамического торможения производится отключением контакторов ускорения, показанных в рассматриваемых узлах схем условно в виде одного контактора КМ3, команда на отключение которого подается блокировочным контактом линейного контактора КМ1.
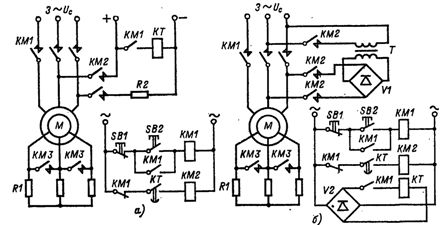
Рис. 1 Схемы управления динамическим торможением асинхронных двигателей с фазным ротором с заданием времени при наличии и отсутствии сети постоянного тока
Эквивалентное значение постоянного тока в обмотке статора при торможении обеспечивается в схеме рис. 1, а дополнительным резистором R2, а в схеме рис. 1. б соответствующим выбором коэффициента трансформации трансформатора Т.
Контактор торможения КМ2 может быть выбран как на постоянном, так и на переменном токе в зависимости от требуемого числа включений в час и использования пусковой аппаратуры.
Приведенные на рис. 1 схемы управления могут использоваться для управления режимом динамического торможения асинхронного двигателя с короткозамкнутым ротором. Для этого обычно используется схема с трансформатором и выпрямителем, приведенная на рис. 1, б.
Схемы торможения противовключением асинхронных двигателей
При управлении моментом при торможении противовключением асинхронного двигателя с короткозамкнутым ротором с контролем скорости применяется узел схемы, приведенный на рис. 2.
В качестве реле противовключения используется реле контроля скорости SR, укрепляемое на двигателе. Реле настраивается на напряжение отпадания, соответствующее скорости, близкой к нулю и равной (0,1 - 0,2) ωуст.
Схема используется для остановки двигателя с торможением противовключением в реверсивной (рис. 2, а) в в нереверсивной (рис. 2, б) схемах. Команда SR используется для отключения контакторов КМ2 или КМЗ и КМ4, отключающих обмотку статора от напряжения сети при скорости двигателя, близкой к нулю. При реверсировании двигателя команды SR не используются.
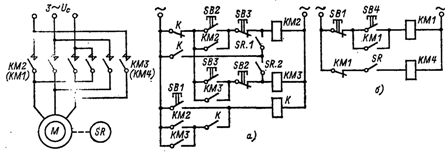
Рис. 2 Узлы схемы управления торможения противовключением асинхронного двигателя с коооткозамкнутым ротором с контролем скорости при остановке в реверсивной и нереверсивной схемах
Узел управления асинхронным двигателем с фазным ротором в режиме торможения противовключеиием с одной ступенью, состоящей из R1 и R2, приведен на рис. 3. Управляющее реле противовключения KV, в качестве которого применяется, например, реле напряжения постоянного тока типа РЭВ301, которое подключено к двум фазам ротора через выпрямитель V. Реле настраивается на напряжение отпадания.
Часто для настройки реле KV используется дополнительный резистор R3. Схема в основном применяется при реверсировании АД со схемой управления, приведенной на рис. 3, а, но может использоваться и при остановке в нереверсивной схеме управления, приведенной на рис. 3, б.
При пуске двигателя реле противовключения КV не вклгочатся и ступень противовключения резистора ротора R1 выводится сразу после подачи управляющей команды на пуск.
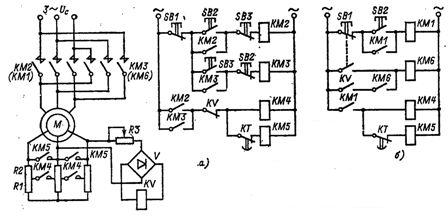
Рис. 3. Узлы схем управления торможением противовключением асинхронных двигателей с фазным ротором с контролем скорости при реверсе и остановке
В режиме противовключения после подачи команды на реверс (рис. 3, а) или остановку (рис. 3, б) скольжение электродвигателя повышается и происходит включение реле KV.
Реле KV отключает контакторы КМ4 и КМ5 и тем самым вводит полное сопротивление Rl + R2 ротор двигателя.
В конце процесса торможения при скорости асинхронного двигателя, близкой к нулю и составляющей примерно 10 - 20 % установившейся начальной скорости ωпер = (0,1 - 0,2) ωуст, реле KV отключается, обеспечивая команду на отключение ступени противовключения R1 с помощью контактора КМ4 и на реверсирование электродвигателя в реверсивной схеме или команду на остановку электродвигателя в нереверсивной схеме.
В приведенных схемах в качестве управляющего устройства может применяться командоконтроллер и другие аппараты.
Схемы механического торможения асинхронных двигателей
При остановке асинхронных двигателей, а также для удержания механизма передвижения или подъема, например в крановых промышленных установках, в неподвижном состоянии при отключенном двигателе применяется механическое торможение. Оно обеспечивается электромагнитными колодочными или другими тормозами с трехфазным электромагнитом переменного тока, который при включении растормаживает тормоз. Электромагнит тормоза YB включается и отключается вместе с двигателем (рис 4, а).
Напряжение на электромагнит тормоза YB может подаваться контактором торможения КМ2, если нужно отключать тормоз не одновременно с двигателем, а с некоторой задержкой по времени, например после окончания электрического торможения (рис. 4, б)
Выдержку времени обеспечивает реле времени КТ, получающее команду на начало отсчета времени, обычно при отключении линейного контактора КМ1 (рис. 4, в).
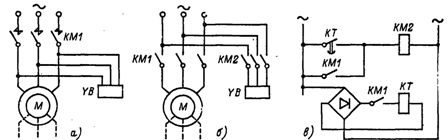
Рис. 4. Узлы схем, осуществляющих механическое торможение асинхронных двигателей
В асинхронных электроприводах применяются также электромагнитные тормоза постоянного тока при управлении электродвигателем от сети постоянного тока.
Схемы конденсаторного торможения асинхронных двигателей
Для торможения АД с короткозамкнутым ротором применяется также конденсаторное торможение с самовозбуждением. Оно обеспечивается конденсаторами C1 - С3, подключенными к обмотке статора. Включаются конденсаторы по схеме звезды (рис. 5, а) или треугольника (рис. 5, б).
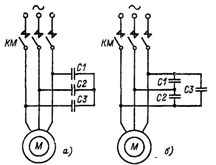
Рис. 5. Узлы схем, осуществляющих конденсаторное торможение асинхронных двигателей
etkmdv.ru
 После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю. Такая остановка электродвигателя при движении по инерции называется свободным выбегом. Многие электродвигатели, работающие в продолжительном режиме или со значительными нагрузками, останавливают путем свободного выбега.
В тех же случаях, когда продолжительность свободного выбега значительна и оказывает влияние на производительность электродвигателя (работа с частыми пусками), для сокращения времени остановки применяют искусственный метод преобразования кинетической энергии, запасенной в движущейся системе, называемый торможением.
Все способы торможения электродвигателей можно разделить на два основных вида: механическое и электрическое.
При механическом торможении кинетическая энергия преобразуется в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При электрическом торможении кинетическая энергия преобразуется в электрическую и в зависимости от способа торможения двигателя либо отдается в сеть, либо преобразуется в тепловую энергию, идущую на нагрев обмоток двигателя и реостатов.
Наиболее совершенными считают такие схемы торможения, при которых механические напряжения в элементах электродвигателя незначительны
Схемы динамического торможения асинхронных двигателей
Для управления моментом при динамическом торможении асинхронным двигателем с фазным ротором по программе с заданием времени используются узлы схем, приведенные на рис. 1, из которых схема рис. 1, а применяется при наличии сети постоянного тока, а схема рис. 1, б — при отсутствии ее.В качестве тормозных резисторов в роторе используются пусковые резисторы R1, включение которых в режиме динамического торможения производится отключением контакторов ускорения, показанных в рассматриваемых узлах схем условно в виде одного контактора КМ3, команда на отключение которого подается блокировочным контактом линейного контактора КМ1.
Рис. 1 Схемы управления динамическим торможением асинхронных двигателей с фазным ротором с заданием времени при наличии и отсутствии сети постоянного тока
Эквивалентное значение постоянного тока в обмотке статора при торможении обеспечивается в схеме рис. 1, а дополнительным резистором R2, а в схеме рис. 1. б соответствующим выбором коэффициента трансформации трансформатора Т.
Контактор торможения КМ2 может быть выбран как на постоянном, так и на переменном токе в зависимости от требуемого числа включений в час и использования пусковой аппаратуры.
Приведенные на рис. 1 схемы управления могут использоваться для управления режимом динамического торможения асинхронного двигателя с короткозамкнутым ротором. Для этого обычно используется схема с трансформатором и выпрямителем, приведенная на рис. 1, б.
Схемы торможения противовключением асинхронных двигателей
При управлении моментом при торможении противовключением асинхронного двигателя с короткозамкнутым ротором с контролем скорости применяется узел схемы, приведенный на рис. 2.
В качестве реле противовключения используется реле контроля скорости SR, укрепляемое на двигателе. Реле настраивается на напряжение отпадания, соответствующее скорости, близкой к нулю и равной (0,1 - 0,2) ωуст.
Схема используется для остановки двигателя с торможением противовключением в реверсивной (рис. 2, а) в в нереверсивной (рис. 2, б) схемах. Команда SR используется для отключения контакторов КМ2 или КМЗ и КМ4, отключающих обмотку статора от напряжения сети при скорости двигателя, близкой к нулю. При реверсировании двигателя команды SR не используются.
Рис. 2 Узлы схемы управления торможения противовключением асинхронного двигателя с коооткозамкнутым ротором с контролем скорости при остановке в реверсивной и нереверсивной схемах
Узел управления асинхронным двигателем с фазным ротором в режиме торможения противовключеиием с одной ступенью, состоящей из R1 и R2, приведен на рис. 3. Управляющее реле противовключения KV, в качестве которого применяется, например, реле напряжения постоянного тока типа РЭВ301, которое подключено к двум фазам ротора через выпрямитель V. Реле настраивается на напряжение отпадания.
Часто для настройки реле KV используется дополнительный резистор R3. Схема в основном применяется при реверсировании АД со схемой управления, приведенной на рис. 3, а, но может использоваться и при остановке в нереверсивной схеме управления, приведенной на рис. 3, б.
При пуске двигателя реле противовключения КV не вклгочатся и ступень противовключения резистора ротора R1 выводится сразу после подачи управляющей команды на пуск.
Рис. 3. Узлы схем управления торможением противовключением асинхронных двигателей с фазным ротором с контролем скорости при реверсе и остановке
В режиме противовключения после подачи команды на реверс (рис. 3, а) или остановку (рис. 3, б) скольжение электродвигателя повышается и происходит включение реле KV.
Реле KV отключает контакторы КМ4 и КМ5 и тем самым вводит полное сопротивление Rl + R2 ротор двигателя.
В конце процесса торможения при скорости асинхронного двигателя, близкой к нулю и составляющей примерно 10 - 20 % установившейся начальной скорости ωпер = (0,1 - 0,2) ωуст, реле KV отключается, обеспечивая команду на отключение ступени противовключения R1 с помощью контактора КМ4 и на реверсирование электродвигателя в реверсивной схеме или команду на остановку электродвигателя в нереверсивной схеме.
В приведенных схемах в качестве управляющего устройства может применяться командоконтроллер и другие аппараты.
Схемы механического торможения асинхронных двигателей
При остановке асинхронных двигателей, а также для удержания механизма передвижения или подъема, например в крановых промышленных установках, в неподвижном состоянии при отключенном двигателе применяется механическое торможение. Оно обеспечивается электромагнитными колодочными или другими тормозами с трехфазным электромагнитом переменного тока, который при включении растормаживает тормоз. Электромагнит тормоза YB включается и отключается вместе с двигателем (рис 4, а).Напряжение на электромагнит тормоза YB может подаваться контактором торможения КМ2, если нужно отключать тормоз не одновременно с двигателем, а с некоторой задержкой по времени, например после окончания электрического торможения (рис. 4, б)
Выдержку времени обеспечивает реле времени КТ, получающее команду на начало отсчета времени, обычно при отключении линейного контактора КМ1 (рис. 4, в).
Рис. 4. Узлы схем, осуществляющих механическое торможение асинхронных двигателей
В асинхронных электроприводах применяются также электромагнитные тормоза постоянного тока при управлении электродвигателем от сети постоянного тока.
Схемы конденсаторного торможения асинхронных двигателей
Для торможения АД с короткозамкнутым ротором применяется также конденсаторное торможение с самовозбуждением. Оно обеспечивается конденсаторами C1 - С3, подключенными к обмотке статора. Включаются конденсаторы по схеме звезды (рис. 5, а) или треугольника (рис. 5, б).
Рис. 5. Узлы схем, осуществляющих конденсаторное торможение асинхронных двигателей
www.electromontag-pro.ru