Условия получения:
1) наличие не менее двух обмоток;
2) токи в обмотках должны отличаться по фазе
3) оси обмоток должны быть смещены в пространстве.
В трёхфазной машине при одной паре полюсов (р=1) оси обмоток должны быть смещены в пространстве на угол 120°, при двух парах полюсов (р=2) оси обмоток должны быть смещены в пространстве на угол 60° и т.д.
Рассмотрим магнитное поле, которое создаётся с помощью трёхфазной обмотки, имеющей одну пару полюсов (р=1). Оси обмоток фаз смещены в пространстве на угол 120° и создаваемые ими магнитные индукции отдельных фаз (BA, BB, BC) смещены в пространстве тоже на угол 120°.
Магнитные индукции полей, создаваемые каждой фазой, как и напряжения, подведённые к этим фазам, являются синусоидальными и отличаются по фазе на угол 120°.
На обмотку статора подается напряжение, под действием которого по этим обмоткам протекает ток и создает вращающееся магнитное поле. Магнитное поле воздействует на стержни ротора и по закону магнитной индукции наводит в них ЭДС. В стержнях ротора под действием наводимой ЭДС возникает ток. Токи в стержнях ротора создают собственное магнитное поле стержней, которые вступают во взаимодействие с вращающимся магнитным полем статора. В результате на каждый стержень действует сила, которая складываясь по окружности, создает вращающийся электромагнитный момент ротора.

Приняв начальную фазу индукции в фазе А (φA) равной нулю, можно записать:

Магнитная индукция результирующего магнитного поля определяется векторной суммой этих трёх магнитных индукций.
Найдём результирующую магнитную индукцию с помощью векторных диаграмм, построив их для нескольких моментов времени.
а) При 
б) При 
в) При 
Нарисовать векторные диаграммы
Как следует из диаграмм, магнитная индукция B результирующего магнитного поля машины вращается, оставаясь неизменной по величине. Таким образом, трёхфазная обмотка статора создаёт в машине круговое вращающееся магнитное поле. Направление вращения магнитного поля зависит от порядка чередования фаз. Величина результирующей магнитной индукции.

Частота вращения магнитного поля  зависит от частоты сети
зависит от частоты сети и числа пар полюсов магнитного поля
и числа пар полюсов магнитного поля .
.
 , [об/мин].
, [об/мин].
При этом частота вращения магнитного поля не зависит от режима работы асинхронной машины и её нагрузки.
При анализе работы асинхронной машины часто используют понятие о скорости вращения магнитного поля ω0, которая определяется соотношением:
 , [рад/сек].
, [рад/сек].
Для сравнения частоты вращения магнитного поля  и ротора
и ротора ввели коэффициент, который назвали скольжением и обозначили буквой
ввели коэффициент, который назвали скольжением и обозначили буквой . Скольжение может измеряться в относительных единицах и в процентах.
. Скольжение может измеряться в относительных единицах и в процентах.
 или
или
а) ЭДС статора.
Магнитное поле, создаваемое обмоткой статора, вращается относительно неподвижного статора с частотой  и будет наводить в обмотке статора ЭДС. Действующее значение ЭДС, наводимой этим полем в одной фазе обмотки статора определяется выражением:
и будет наводить в обмотке статора ЭДС. Действующее значение ЭДС, наводимой этим полем в одной фазе обмотки статора определяется выражением:

где:  =0.92÷0.98 – обмоточный коэффициент;
=0.92÷0.98 – обмоточный коэффициент;
 –частота сети;
–частота сети;
 –число витков одной фазы обмотки статора;
–число витков одной фазы обмотки статора;
 –результирующее магнитное поле в машине.
–результирующее магнитное поле в машине.
б) Уравнение электрического равновесия фазы обмотки статора.
Это уравнение составлено по аналогии с катушкой с сердечником, работающей на переменном токе.
 =
= =-
=- +
+ (
( )= -
)= - +
+
Здесь  и
и – напряжение сети и напряжение, подведённое к обмотке статора.
– напряжение сети и напряжение, подведённое к обмотке статора.
 –активное сопротивление обмотки статора, связанное с потерями на нагрев обмотки.
–активное сопротивление обмотки статора, связанное с потерями на нагрев обмотки.
 –индуктивное сопротивление обмотки статора, связанное с потоком рассеяния.
–индуктивное сопротивление обмотки статора, связанное с потоком рассеяния.
 –полное сопротивление обмотки статора.
–полное сопротивление обмотки статора.
 –ток в обмотке статора.
–ток в обмотке статора.
При анализе работы асинхронных машин часто принимают . Тогда можно записать:
. Тогда можно записать:

Из этого выражения следует, что магнитный поток  в асинхронной машине не зависит от её режима работы, а при заданной частоте сети
в асинхронной машине не зависит от её режима работы, а при заданной частоте сети зависит только от действующего значения приложенного напряжения
зависит только от действующего значения приложенного напряжения . Аналогичное соотношение имеет место и в другой машине переменного тока – в трансформаторе.
. Аналогичное соотношение имеет место и в другой машине переменного тока – в трансформаторе.
studfiles.net
Обмотка короткозамкнутого провода состоит из m-частей. Сдвиг фаз между ЭДС индуктивного вращающего магнитным полем статора в двух соседних стержнях, равен 
р – число пар полюсов двигателя;
N – число стержней;
Можно считать, что число фаз короткозамкнутого ротора равно числу стержней m2=N. Цепь фазного ротора представляет трехфазную систему m2=3.
 2 – число витков в каждой фазе.
2 – число витков в каждой фазе.
Пусть цепь ротора разомкнута, т.е. ток в ней отсутствует, на ротор не действуют электромагнитные силы и он неподвижен. При неподвижности ротора, частота ЭДС индуктированной в его обмотке, равна частоте токов в цепи обмоток статора.
f – частота сети, 50 Гц;
Если ротор вращать с частотой n2, вслед за вращающимся магнитным полем статора, то частота ЭДС индуктированной обмотки уменьшится и станет равной

Если цепь ротора замкнуть, то токи в ней образуют:
1) Многофазную систему, с числом фаз m2=N, в случае короткозамкнутого ротора.
2) Трехфазную систему, с числом фаз m2=3, в случае фазного ротора => токи в обмотке ротора аналогичны токам в обмотках статора, должны возбуждать вращающееся магнитное поле.
nотн. – частота вращения этого поля, относительно ротора.

Т.к. сам ротор вращается в том же направлении с частотой n2, то его поле вращается в пространстве с частотой, равной

Т.е. поле ротора вращается синхронно с полем статора, это является характерным условием полной передачи энергии от статора к ротору.
Складываясь, вращающееся магнитное поле статора и ротора, образуют рабочее вращающееся магнитное поле асинхронного двигателя, которое служит таким же связующим звеном, между обмотками статора и ротора, как и переменное магнитное поле в сердечнике трансформатора, передающее энергию от первичной обмотки ко вторичной обмотке. Именно это, рабочее поле, необходимо знать для анализа процессов в цепях статора и ротора.
Для устойчивой работы двигателя, важно, чтобы автоматически установилось равновесие вращающего и тормозного моментов, с увеличением нагрузки на валу двигателя, увеличится тормозной момент, соответственно должен возрастать и вращающий момент

Рмех – механическая мощность на вал двигателя;
 2 – угловая скорость ротора
2 – угловая скорость ротора

Это уравновешивание моментов у работающего двигателя, осуществляется следующим образом, при увеличении нагрузки на валу, тормозной момент оказывается больше вращающего момента, в следствии чего, частота вращения ротора уменьшается , скольжение вырастает. Повышение скольжения вызывает увеличение вращающего момента. Равновесие моментов восстанавливается при возрастании скольжения.



R2 – активное сопротивление;
Xрас.2 – индуктивное рассеянное сопротивление.


 –коэффициент мощности.
–коэффициент мощности.
МПТ состоит из неподвижной части, в которой возбуждается главное магнитное поле, и вращающейся части, в которой индуктируется э.д.с. Токи от этой э.д.с., взаимодействуя с главным магнитным полем, создают момент (в двигательном режиме он является вращающим, в генераторном – тормозным).
Неподвижная часть состоит из станины и полюсов, которые к ней крепятся. Полюса подразделяются на главные, в которых возбуждаются основной магнитный поток, и добавочные, которые устанавливаются в целях улучшения коммутации машины.

Принцип действия
Машина постоянного тока может работать в двух режимах: двигательном и генераторном, в зависимости от того, какую энергию к ней подвести — если электрическую, то электрическая машина будет работать в режиме электродвигателя, а если механическую — то будет работать в режиме генератора. Однако электрические машины, как правило, предназначены заводом изготовителем для одного определенного режима работы — или в режиме генератора, или электродвигателя.
Область применения
Электрические Машины постоянного тока используют как в качестве генератора, так и вкачестве двигателя. Наибольшее применение получили двигатели постоянного тока:
- Они широко используются для привода подъёмных средств в качестве крановых двигателей.
- Приводом транспортных средств в качестве тяговых двигателей.
- Для привода устройств автоматики.
- Для привода прокатных станов.
- Для привода штатных подъёмников.
studfiles.net
Принцип получения вращающегося магнитного поля. В основе работы асинхронных двигателей лежит вращающееся магнитное поле, создаваемое МДС обмоток статора.
Принцип получения вращающегося магнитного поля с помощью неподвижной системы проводников заключается в том, что если по системе неподвижных проводников, распределенных в пространстве по окружности, протекают токи, сдвинутые по фазе, то в пространстве создается вращающееся поле. Если система проводников симметрична, а угол сдвига фаз между токами соседних проводников одинаков, то амплитуда индукции вращающегося магнитного поля и скорость постоянны. Если окружность с проводниками развернуть на плоскость, то с помощью подобной системы можно получить «бегущее» поле.
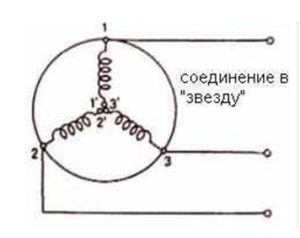
Вращающееся поле переменного тока трехфазной цепи. Рассмотрим получение вращающегося поля на примере трехфазного асинхронного двигателя с тремя обмотками, сдвинутыми по окружности на 120° (рис.3.5) и соединенными звездой. Пусть обмотки статора питаются симметричным трехфазным напряжением со сдвигом фаз напряжений и токов на 120°.
Если для обмотки АХ принять начальную фазу тока равной нулю, тогда мгновенные значения токов имеют вид



Графики токов представлены на рис. 3.6. Примем, что в каждой обмотке всего два провода, занимающие два диаметрально расположенные паза.

Рис. 3.5 Рис. 3.6
Как видно из рис. 3.6, в момент времени to ток в фазе А положительный, а в фазах В и С – отрицательный.
Если ток положительный, то направление тока примем от начала к концу обмотки, что соответствует обозначению знаком «х» в начале обмотки и знаком «·» (точка) в конце обмотки. Пользуясь правилом правоходового винта, легко найти картину распределения магнитного поля для момента времени to (рис. 3.7, а). Ось результирующего магнитного поля с индукцией Втрез расположена горизонтально.

Рис. 3.7
На рис. 3.7, б показана картина магнитного поля в момент времени ti, соответствующий изменению фазы тока на угол  = 60°. В этот момент времени токи в фазах А и В положительные, т. е. ток идет в них от начала к концу, а ток в фазе С – отрицательный, т. е. идет от конца к началу. Магнитное поле оказывается повернутым по часовой стрелке на угол
= 60°. В этот момент времени токи в фазах А и В положительные, т. е. ток идет в них от начала к концу, а ток в фазе С – отрицательный, т. е. идет от конца к началу. Магнитное поле оказывается повернутым по часовой стрелке на угол  = 60°. Если угловая частота тока
= 60°. Если угловая частота тока  , то
, то  . (Здесь
. (Здесь  , где
, где  – частота тока в сети). В моменты времени t2 и t3 ось магнитного поля соответственно повернется на углы
– частота тока в сети). В моменты времени t2 и t3 ось магнитного поля соответственно повернется на углы  и
и (рис. 3.6, в и г). Через время, равное периоду Т, ось поля займет первоначальное положение. Следовательно, за период Т поле делает один оборот (рис. 3.7, д) (
(рис. 3.6, в и г). Через время, равное периоду Т, ось поля займет первоначальное положение. Следовательно, за период Т поле делает один оборот (рис. 3.7, д) (  (
( )). В рассмотренном случае число полюсов 2р = 2 и магнитное поле вращается с частотой n1=60f1=60∙50=3000 об / мин (f1=50 Гц – промышленная частота). Можно доказать, что результирующая магнитная индукция представляет собой вращающееся поле с амплитудой
)). В рассмотренном случае число полюсов 2р = 2 и магнитное поле вращается с частотой n1=60f1=60∙50=3000 об / мин (f1=50 Гц – промышленная частота). Можно доказать, что результирующая магнитная индукция представляет собой вращающееся поле с амплитудой

где Вт – максимальная индукция одной фазы; Вmрез – максимальная индукция трех фаз;  – угол между горизонтальной осью и прямой, соединяющей центр с произвольной точкой между статором и ротором.
– угол между горизонтальной осью и прямой, соединяющей центр с произвольной точкой между статором и ротором.
Направление вращения поля. В рассмотренном случае направление вращения поля совпадает с направлением движения часовой стрелки. Если поменять местами выводы любых двух фаз питающего напряжения, например B и С, что соответствует обратной последовательности фаз, то направление вращения поля будет противоположным (против движения часовой стрелки), т. е. магнитное поле реверсируется (ср. рис. 3.8).
Формула частоты вращения поля. Если число катушек в каждой фазе увеличить, а сдвиг фаз между токами сохранить в 120°, то частота вращения поля изменится. Например, при двух катушках в каждой фазе, расположенных, как показано на рис. 3.9, поле за один период повернется в пространстве на 180°.

Рис. 3.8 Рис. 3.9 Рис. 3.10
Для получения картины поля возьмем момент времени to, когда ток в фазе А положительный, а токи в фазах В и С отрицательные. Пользуясь правилом знаков для токов находим, что в данном случае число полюсов 2р = 4 или р = 2 и тогда n1 = 60f1 /p = 3000/2 =1500 об/мин. Рассуждая аналогично, для трех катушек в каждой фазе находим картину поля, показанную на рис.3.10. Здесь р = 3 и, следовательно, n1 = 1000 об/мин.
Общая формула для определения частоты вращения, об/мин, будет
n1 = 60 f1 /p (3.1)
Во всех рассмотренных случаях катушки каждой фазы были соединены между собой последовательно. Именно при таком соединении частота вращения поля статора для р = 1, 2 и 3 при f1= 50 Гц составила соответственно 3000, 1500 и 1000 об/мин.
Параллельное соединение катушек. Покажем, что при переключении катушек из одной фазы в другую и при их параллельном соединении число полюсов поля и, следовательно, частота вращения поля будут отличными от рассмотренных. В качестве примера возьмем по две катушки в каждой фазе и соединим их между собой параллельно так, как показано на рис.3.11,а и в развернутом виде на рис. 3.11,6. Из картины поля видно, что р = 1, а частота вращения n1 = 3000 об/мин. Выше было показано, что при последовательном соединении тех же катушек частота вращения была 1500 об/мин. При частоте тока в в сети 50 Гц частота вращения поля статора определяется из выражения
п1 = 60 f1 / p = 60 ∙50 / p .
Задаваясь различным числом пар полюсов р = 1, 2, 3, 4, 5, 6, 8, 10, находим частоту вращения поля. Результаты расчета сведены в табл. 3.1.

Таблица 3.1
| 1 | 2 | 3 | 4 | 5 | 6 | 8 | 10 |
| 3000 | 1500 | 1000 | 750 | 600 | 500 | 375 | 300 |
electrono.ru
Одним из главных достоинств трехфазных цепей является возможность получения вращающихся магнитных полей, лежащих в основе работы наиболее распространенных типов асинхронных двигателей. Принцип получения вращающегося магнитного поля можно проиллюстрировать на примере двух взаимно перпендикулярных катушек индуктивностей. На рисунке 2.20 показан в разрезе один виток каждой катушки, питаемой синусоидальными токами i1 и i2. Под действием этих токов создаются магнитные поля с индукцией в точке пересечения катушек (ток течет от конца, помеченного знаком «х» к концу «.»): B1 = Bmsinwt и B2 = Bmcoswt. Результирующий вектор магнитной индукции
 , (2.50)
, (2.50)
т. е. получено результирующее магнитное поле, вращающееся по часовой стрелке с угловой частотой w. Аналогичным образом может быть образовано вращающееся магнитное поле в трехфазной системе с токами, создающими мгновенные значения индукции:
 . (2.51)
. (2.51)
Рисунок 2.20 – Магнитное поле двух взаимно перпендикулярных
катушек индуктивности
Введем в рассмотрение фазовый оператор a = ej2p/3. Тогда результирующий вектор индукции  определится как:
определится как:
 (2.52)
(2.52)
Таким образом, получено результирующее магнитное поле с амплитудой магнитной индукции 1,5Вm, вращающееся с угловой частотой w по часовой стрелке.
На использовании вращающегося магнитного поля основан принцип действия трехфазного асинхронного двигателя. Вращающееся магнитное поле в асинхронном двигателе создается обмотками статора. Это поле наводит в обмотках ротора индукционные токи. Взаимодействие этих токов с вращающимся магнитным полем приводит к возникновению вращающегося момента в направлении поворота поля. В результате ротор начинает вращаться со скоростью u (об/мин), несколько меньшей скорости вращения магнитного поля un (отсюда термин «асинхронный»). Для характеристики степени различия указанных скоростей вращения вводят параметр
 , (2.53)
, (2.53)
называемый скольжением. Для получения вращающего момента величина скольжения должна быть больше нуля (обычно s0 = 0,02...0,04).
Синхронный генератор
Ротор синхронных машин вращается синхронно с вращающимся магнитным полем. Поскольку частоты вращения ротора и магнитного поля одинаковы, в обмотке ротора не индуцируются токи. Поэтому обмотка ротора получает питание от источника постоянного тока. Устройство статора синхронной машины практически не отличается от устройства статора асинхронной машины.
Питание к обмотке ротора подводится через скользящие контакты, состоящие из медных колец и графитовых щеток. При вращении ротора его магнитное поле пересекает витки обмотки статора, индуцируя в них ЭДС. Чтобы получить синусоидальную форму ЭДС, зазор между поверхностью ротора и статором увеличивают от середины полюсного наконечника к его краям (рисунок 2.21).

Рисунок 2.21 – Синхронный генератор
Частота индуцированной ЭДС (напряжения, тока) синхронного генератора:
 (2.54)
(2.54)
где р – число пар полюсов ротора генератора.
Синхронный двигатель
Устройство статора синхронного двигателя аналогично устройству статора асинхронного двигателя. Ротор синхронного двигателя представляет собой электромагнит или постоянный магнит (рисунок 2.22). Принцип работы синхронного двигателя поясняется рисунком. Внутри магнита N1S1 помещен магнит NS. Если магнит N1S1 вращать, то он потянет за собой магнит NS. В стационарном режиме частоты вращения обоих магнитов одинаковы.
К валу магнита NS можно приложить механическую нагрузку. Чем больше эта нагрузка, тем больше угол отставания оси магнита NS от оси магнита N1S1.

Рисунок 2.22 – Синхронный двигатель
В реальном двигателе поле магнита заменено вращающимся магнитным полем статора; при этом ротор либо вращается синхронно с магнитным полем статора, отставая на угол a, либо останавливается (выпадает из синхронизма) при перегрузке. Таким образом, независимо от нагрузки ротор всегда вращается с постоянной частотой, равной частоте вращения магнитного поля статора: n2 = n1 = 60f/р.
Постоянство частоты вращения – важное достоинство синхронного двигателя. Строгое постоянство частоты вращения требуется во многих областях техники, например при записи и воспроизведении звука. Недостаток синхронного двигателя – трудность пуска: для пуска нужно раскрутить ротор в сторону вращения поля статора. Для этого чаще всего применяют специальную короткозамкнутую обмотку, вделанную в ротор. В момент пуска двигатель работает как асинхронный. Когда частота вращения ротора приближается к частоте вращения поля статора, ротор входит в синхронизм и двигатель работает как синхронный.
Синхронные двигатели особенно удобны для привода роторов гироскопов. В тех случаях, когда гироскоп используют для особо точных измерений (например, в баллистических ракетах), приводом ротора гироскопа служит синхронный двигатель. При этом частота вращения ротора зависит только от конструкции двигателя и частоты питающего тока, которую можно стабилизировать с очень высокой степенью точности.
Вопросы для самотестирования
1 Как изменяется эквивалентная индуктивность двух последовательно соединённых индуктивно связанных катушек при согласном включении?
2 Из каких двух составляющих состоит эквивалентное сопротивление отдельных индуктивно связанных ветвей при их параллельном включении?
3 Какие законы и методы используют при расчёте индуктивно связанных цепей?
4 Размагничивает или намагничивает вторичная обмотка трансформатора первичную обмотку?
5 Какие виды соединений могут быть в трёхфазных цепях?
ЭЛЕКТРОННЫЕ КОМПОНЕНТЫ
poisk-ru.ru
•Магнитная цепь асинхронной машины
Магнитодвижущая сила обмотки статора создает магнитный поток, который замыкается через элементы магнитной системы машины. Магнитную систему асинхронной машины называют неявнополюсной (рис. 11.1), так как она не имеет явно выраженных магнитных полюсов (сравните с рис. 20.1). Количество магнитных полюсов в неявнополюсной магнитной системе определяется числом полюсов в обмотке, возбуждающей магнитное поле, в данном случае в обмотке статора. Магнитная система машины, состоящая из сердечников статора и ротора, представляет собой разветвленную симметричную магнитную цепь. Например, магнитная система четырехполюсной машины состоит из четырех одинаковых ветвей, в каждой из которых замыкается половина магнитного потока одного полюса (рис. 11.1). В двухполюсной машине таких ветвей две, в шестиполюсной — шесть и т. д. Каждая из таких ветвей образует неразветвленную магнитную цепь, которая и является предметом расчета. На рис. 11.2 представлена магнитная цепь неявнополюсной машины. Здесь видны участки магнитной цепи: воздушный зазор δ, зубцовый слой статора hz1, зубцовый слой ротора hz1 , спинка ротора Lc2, спинка статора Lc1. Замыкаясь в магнитной цепи, магнитный поток проходит воздушный зазор и зубцовые слои статора и ротора дважды.
Каждый из перечисленных участков оказывавает магнитному потоку некоторое магнитное сопротивление. Поэтому на каждом участке магнитной цепи затрачивается часть МДС обмотки статора, называемая магнитным напряжением:
 = 2Fδ + 2Fzl + 2Fz2 + Fcl+Fc2, (11.1)
= 2Fδ + 2Fzl + 2Fz2 + Fcl+Fc2, (11.1)
где — МДС обмотки статора на пару полюсов в режиме х.х., A; Fδ, Fz1, Fz2, Fc1 и Fc2 — магнитные напряжения соответственно воздушного зазора, зубцовых слоев статора и ротора, спинки статора и ротора, А.
— МДС обмотки статора на пару полюсов в режиме х.х., A; Fδ, Fz1, Fz2, Fc1 и Fc2 — магнитные напряжения соответственно воздушного зазора, зубцовых слоев статора и ротора, спинки статора и ротора, А.
Таким образом, расчет МДС обмотки статора на пару полюсов сводится к расчету магнитных напряжений на всех участках магнитной цепи.
Полученное в результате расчета магнитной цепи значение МДС на пару полюсов
 позволяет определить намагничивающий ток (основную гармонику) обмотки
позволяет определить намагничивающий ток (основную гармонику) обмотки
статора:
I1μ =  (11.2)
(11.2)
Исходным параметром при расчете магнитной цепи асинхронного двигателя является максимальная магнитная индукция в воздушном зазоре Вδ. Величину Вδ принимают по рекомендуемым значениям в зависимости от наружного диаметра сердечника статора D1нар и числа полюсов 2р. Например при D1нар = 300  800 мм рекомендуемые значения
800 мм рекомендуемые значения

Рис. 11.1. Магнитное поле четырехполюсной Рис. 11.2. Магнитная цепь
асинхронной машины асинхронной машины
Вδ = 0,80 1,1 Тл соответственно. При этом для двигателей с большим 2р принимают большие значения Вδ.
1,1 Тл соответственно. При этом для двигателей с большим 2р принимают большие значения Вδ.
Магнитная индукция Вδ определяет магнитную нагрузку двигателя: при слишком малом Вδ магнитная система двигателя недогружена, а поэтому габаритные размеры двигателя получаются неоправданно большими; если же задаться чрезмерно большим течением Вδ, то резко возрастут магнитные напряжения на участках магнитной системы, особенно в зубцовых слоях статора и ротopa, в результате возрастет намагничивающий ток статора I1μ снизится КПД двигателя (см. § 13.1).
Для изготовления сердечников статора и ротора асинхронных двигателей обычно применяют холоднокатаные изотропные листовые электротехнические стали, обладающие одинаковой магнитной проводимостью вдоль и поперек проката листов
(табл 11.1).
Таблица 11.1
| Марка стали | Краткая характеристика | Область применения |
| 2013 2312 2411 | Холоднокатаная изотропная, содержащая до 0,4 % кремния Холоднокатаная изотропная, содержащая 1,8 – 2,8 % кремния Холоднокатаная изотропная, содержащая 2,8 – 3.8 % кремния | Двигатели мощностью до 60 – 90 кВт, напряжением до 660 В Двигатели мощностью 100 – 400 кВт, напряжением до 660 В Двигатели мощностью свыше 400 кВт, напряжением 6 или 10 кВ |
studfiles.net
КАЗАНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНОЛОГИЧЕСКИЙ
УНИВЕРСИТЕТ
Кафедра электротехники
Реферат на тему:

Выполнил:
ст. гр. 5141-4
Тухбатов И.М.
Проверил:
Миляшов А.Н.
Казань 2005 г.
Содержание
Общие сведения………………………………………………………………………………..3
Устройство трехфазной асинхронной машины……………………………………….……..3
Режим работы трехфазной асинхронной машины…………………………………………..4
Вращающееся магнитное поле статора асинхронного двигателя…………………………..5
Вращающееся магнитное поле ротора и рабочее вращающее магнитное поле Ас.М…….6
Универсальная характеристика Ас.М……………………………………………….……......7
Пуск ас.дв. в ход……………………………………………………………………….………8
Методы регулирования частоты вращения Ас.Дв..................................................................9
Из числа различных видов современных электрических машин самой распространенной в наши дни является асинхронная бесколлекторная машина, применяемая обычно в качестве двигателя. Асинхронная машина(Ас.М.)— это машина, в которой при работе возбуждаются вращающееся магнитное поле, но ротор вращается асинхронно, т.е. с угловой скоростью, отличной от угловой скорости поля. Она была изобретена М.О.Доливо-Добровольским в 1888 г., но до настоящего времени сохранила в основном ту простую форму, которую ей придал талантливый русский изобретатель. Ас.М. состоит из трех неподвижных катушек (точнее, обмоток), размещённых на общем сердечнике, и помещённой между ними четвертой, вращающейся катушки.
Ас.М. малой мощности часто выполняются однофазными для устройств, питающихся от двухпроводной сети. Такие машины находят широкое применение в бытовой технике.
Общий недостаток Ас.М. — это относительная сложность и неэкономичность регулирования их режимов работы.
Трехфазная Ас.М. состоит из двух главных частей: неподвижного статора и вращающегося ротора.
Конструкция статора.Статор Ас.М. представляет собой полый цилиндр, собранный из пластин электротехнической стали, изолированных друг от друга слоем лака (рис.1). В пазах на внутренней стороне статора размещаются три фазные обмотки. Каждая фазная обмотка содержит одну или несколько катушечных групп, соединенных последовательно и расположенных вдоль окружности статора на равном расстоянии друг от друга.
 Фазные обмотки соединяются между собой звездой или треугольником и подключаются к трехфазной сети. Токи в фазных обмотках возбуждают в машине вращающееся магнитное поле статора с числом пар полюсовp, равным числу катушечных групп в одной фазной обмотке. Это достигается взаимным расположением фазных обмоток, при котором их катушечные группы сдвинуты по окружности статора относительно катушечных групп соседней фазной обмотки на угол 120°/ p.
Фазные обмотки соединяются между собой звездой или треугольником и подключаются к трехфазной сети. Токи в фазных обмотках возбуждают в машине вращающееся магнитное поле статора с числом пар полюсовp, равным числу катушечных групп в одной фазной обмотке. Это достигается взаимным расположением фазных обмоток, при котором их катушечные группы сдвинуты по окружности статора относительно катушечных групп соседней фазной обмотки на угол 120°/ p.
Для укладки многовитковой катушечной группы в пазах статора ее разделяют на qпоследовательно соединенных секций поwcвитков в каждой секции. Возможны секции с одинаковым и неодинаковым шагом намоткиy. В первом случае стороны каңдой секөии сдвинуты по окруңности статора на угол 180°/ p, что соответствует одному полюсному делениюy=τ,т.е. длине окружности статора, приходящейся на один полюс. Во втором случае секции катушечной группы вложены друг в друга, т.е. их шаг намоткиτ<y< τ.
Распределение фазных обмоток по нескольким пазам не только улучшает использование цилиндрической конструкции статора, но и обуславливает необходимое распределение магнитного поля в воздушном зазоре между статором и ротором.
Сердечник статора изготавливается с открытыми или полуоткрытыми пазами, применение полуоткрытых пазов уменьшает магнитное сопротивление и, следовательно, намагничивающий ток. При открытых пазах упрощается укладка секций и повышается надежность изоляции.
Конструкция ротора.Ас.М. в основном различаются устройством ротора. Ротор Ас.М. представляет собой цилиндрический сердечник (рис.2), собранный из пластин электротехнической стали, изолированных друг от друга лаком. Сердечник ротора насажен на вал, закрепленный на подшипниках. В пазах ротора располагаются витки обмотки ротора.
В большинстве двигателей применяетсякороткозамкнутый ротор. Он значительно дешевле, и, что очень существенно, обслуживание короткозамкнутым ротором значительно проще. Обмотка короткозамкнутого ротора выполняется в виде цилиндрической клетки из медных или алюминиевых стержней, которые без изоляции вставляются в пазы сердечника. Торцевые концы стержней замыкаются накоротко кольцами из того же материала, что и стержни (т.н. «беличье колесо»). Часто короткозамкнутая обмотка изготовляется путем заливки пазов ротора расплавленным алюминием.
большинстве двигателей применяетсякороткозамкнутый ротор. Он значительно дешевле, и, что очень существенно, обслуживание короткозамкнутым ротором значительно проще. Обмотка короткозамкнутого ротора выполняется в виде цилиндрической клетки из медных или алюминиевых стержней, которые без изоляции вставляются в пазы сердечника. Торцевые концы стержней замыкаются накоротко кольцами из того же материала, что и стержни (т.н. «беличье колесо»). Часто короткозамкнутая обмотка изготовляется путем заливки пазов ротора расплавленным алюминием.
О
 бмоткафазного ротора, называемого также ротором с контактными кольцами, выполняется изолированным проводом. В большинстве случаев она трехфазная, с тем же числом катушек, что и обмотка статора данного двигателя. Три фазные обмотки ротора соединяются на самом роторе звездой, а свободные концы их соединяются с тремя контактными кольцами, укрепленными на валу машины, но изолированными от этого вала. На кольца наложены щетки, установленные на неподвижных щеткодержателях. Через кольца и щетки обмотка ротора присоединена к трехфазному реостату (рис.3). Включение реостата в цепь ротора дает возможность существенно улучшить условия пуска двигателя — уменьшить пусковой ток и увеличить начальный вращающий момент, кроме того, при помощи реостата, включенного в цепь ротора, можно плавно регулировать скорость двигателя.
бмоткафазного ротора, называемого также ротором с контактными кольцами, выполняется изолированным проводом. В большинстве случаев она трехфазная, с тем же числом катушек, что и обмотка статора данного двигателя. Три фазные обмотки ротора соединяются на самом роторе звездой, а свободные концы их соединяются с тремя контактными кольцами, укрепленными на валу машины, но изолированными от этого вала. На кольца наложены щетки, установленные на неподвижных щеткодержателях. Через кольца и щетки обмотка ротора присоединена к трехфазному реостату (рис.3). Включение реостата в цепь ротора дает возможность существенно улучшить условия пуска двигателя — уменьшить пусковой ток и увеличить начальный вращающий момент, кроме того, при помощи реостата, включенного в цепь ротора, можно плавно регулировать скорость двигателя.
На рисунке 4 приведены условные обозначения Ас.М. с короткозамкнутым (а) и фазным (б) ротором на схемах замещения.
studfiles.net
Понятие асинхронной машины связано с тем, что ротор ее имеет частоту вращения, отличающуюся от частоты вращения магнитного поля статора.
Буква "а" здесь играет как бы роль отрицания или нестрогого следования ротора за синхронно вращающимся магнитным полем статора.
Создателем этой простой по конструкции, но удобной и надежной в работе машины является русский инженер М.О. Доливо-Добровольский. Асинхронный двигатель, впервые разработанный в 1889 году, практически не подвергся серьезным изменениям до наших дней.
В основу конструкции асинхронного двигателя положено создание системы трехфазного переменного тока принадлежащее этому же автору.
Переменный ток, подаваемый в трехфазную обмотку статора двигателя, формирует в нем вращающееся магнитное поле.
Основными конструктивными элементами асинхронного двигателя являются неподвижный статор и подвижный ротор (рис. 5.1.1). Статор и ротор разделены воздушным зазором от 0,1 мм до 1,5 мм. Пакет статора c целью уменьшения потерь на вихревые токи набирают из штампованных листов электротехнической стали. На внутренней полости статора имеются пазы, в которые укладываются провода обмотки. Листы статора перед сборкой в пакет изолируют слоем лака или окалины, полученной при их отжиге.

В пазы статора укладывают обмотку, которая в простейшем случае состоит из трех катушек - фаз, сдвинутых в пространстве на 120 эл. градусов. Ротор асинхронного двигателя представляет собой цилиндр, набранный из штампованных листов электротехнической стали. На поверхности ротора имеются продольные пазы для обмотки. Листы сердечника ротора специально не изолируют, т.к. в большинстве случаев достаточно изоляции от окалины.
В зависимости от типа обмотки роторы двигателей обычного исполнения делятся на короткозамкнутые и фазные.
Обмотка короткозамкнутого ротора представляет собой медные стержни, забитые в пазы. С двух сторон эти стержни замыкаются кольцами. Соединения стержней с кольцами осуществляется пайкой или сваркой (рис. 5.1.2).
Чаще всего короткозамкнутую обмотку выполняют расплавленным, алюминием и литьем под давлением. При этом вместе со стержнями и кольцами отливаются и лопатки вентилятора.

Двигатели большой мощности имеют на роторе фазную обмотку. Конструкция ее аналогична обмотке статора. Концы этой обмотки выведены на контактные кольца. С помощью этих колец и токосъемных щеток к обмотке ротора подключают дополнительные сопротивления.
На статоре трехфазного двигателя расположены 3 обмотки (фазы), которые смещены в пространстве по отношению друг к другу на 120 эл. градусов. Токи, подаваемые в фазные обмотки, отодвинуты друг от друга во времени на 1/3 периода (рис. 5.2.1.).
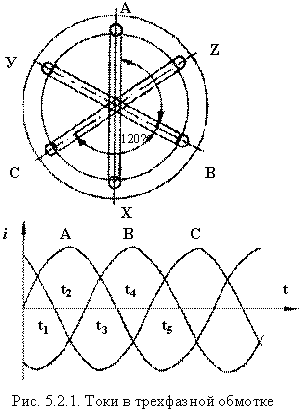
Используя график изменения трехфазного тока, проставим на нем несколько отметок времени; tl, t2, t3,...tn. Наиболее удобными будут отметки, когда один из графиков пересекает ось времени.
Теперь рассмотрим электромагнитное состояние обмоток статора в каждые из принятых, моментов времени.
Рассмотрим вначале точку t1. Ток в фазе А равен нулю, в фазе С он будет положительным - (+) , а в фазе В - отрицательным (·) (рис. 5.2.2, а).

Поскольку каждая фазная обмотка имеет замкнутую форму, то конец фазной обмотки В-У будет иметь противоположный знак, т.е. У - (+), а конец Z обмотки C-Z - (·).
Известно, что вокруг проводника с током всегда образуется магнитное поле. Направление его определяется правилом правоходового винта ("буравчика").
Проведем силовую магнитную линию вокруг проводников С и У и, соответственно, В и Z (см. штриховые линии на рис. 5.2.2 a).
Рассмотрим теперь момент времени t2. В это время тока в фазе В не будет. В проводнике А фазы А-Х он будет иметь знак (+), а в проводнике С фазы C-Z он будет иметь знак (·). Теперь проставим знаки: в проводнике Х - (·), а в проводнике Z - (+).
Проведем силовые линии магнитного поля в момент времени t2(рис. 5.2.2,б). Заметим при этом, что векторсовершил поворот.
Аналогичным образом проведем анализ электромагнитного состояния в фазных обмотках статора в момент времени t3,…tn(рис. 5.2.2, б, в, г, д).
Из рисунков 5.2.2 наглядно видно, что магнитное поле в обмотках и его поток Ф совершают круговое вращение.
Частота вращения магнитного поля статора определяется следующей формулой:

где f - частота тока питающей сети, Гц; p - число пар полюсов.
Если принять f=50 Гц, то для различных чисел пар полюсов (р=1, 2, 3, 4, ) n1=3000, 1500, 1000, 750, об/мин.
studfiles.net