В момент пуска двигателя n = 0 и пусковой ток якоря
IП Я = U/RЯ = (10 – 30) IЯ НОМ, где IЯ НОМ – ток якоря в номинальном режиме работы двигателя.
Для ограничения пускового тока последовательно с обмоткой якоря включают пусковой реостат РП (рис. 6.6), полное сопротивление RП которого рассчитывают из условия IП ДОП = U/(RЯ + RП) < 2 IЯ НОМ.

Рис. 6.6. Электрическая схема двигателя с параллельным возбуждением.
По мере разгона ротора сопротивление пускового реостата постепенно уменьшают до нуля (вручную или автоматически).
Все электродвигатели обладают свойством автоматически создавать вращающий момент МВР, равный моменту сопротивленияна валу МС. Это свойство двигателей называется саморегулированием. Так при увеличении нагрузки работающего двигателя частота вращения ротора n уменьшается. Тогда в соответствии с выражением (6.4) ток якоря будет увеличиваться и, в соответствии с выражением (6.3) будет возрастать вращающий момент до тех пор, пока не установится МВР = МС при частоте вращения якоря меньше первоначальной.
Изменение направление вращения двигателя – реверсирование можно осуществить, изменив направление тока в обмотке якоря или обмотке возбуждения, переключив концы соответствующих обмоток.
Важнейшим преимуществом ДПТ по сравнению с асинхронным двигателем является возможность плавного регулирования его частоты вращения. Из выражения (6.4) получаем
 (6.5)
(6.5)
Из выражения (6.1) имеем
 (6.6)
(6.6)
Подставив (6.6) в (6.5), получаем
 (6.7)
(6.7)
В соответствии с выражением (6.7) частоту вращения ДПТ можно регулировать тремя способами:
реостатным – изменением сопротивления цепи якоря;
полюсным – изменением магнитного потока Ф
якорным – изменением напряжения, подводимого к обмотке якоря.
Реостатное регулирование осуществляется путем увеличения сопротивления цепи якоря RЯ при работающем двигателе с помощью дополнительного реостата, включаемого в цепь якоря. В лабораторных условиях такое регулирование может осуществляться с помощью пускового реостата РП (рис.6.6).
При увеличении сопротивления якорной цепи частота вращения двигателя будет уменьшаться в соответствии с выражением (6.7), поэтому реостатное регулирование позволяет изменять скорость вращения только вниз от номинального значения.
Регулирование скорости при этом сопровождается значительными потерями мощности на нагревание реостата и уменьшением КПД двигателя. Поэтому данный способ реализуется редко и только для маломощных двигателей.
Полюсный способ регулирования скорости заключается в изменении тока возбуждения IВ с помощью регулировочного реостата РР, включаемого в цепь обмотки возбуждения (рис.6.6).
С увеличением сопротивления РР ток возбуждения, а следовательно, магнитный поток Ф уменьшится, а частота вращения двигателя n, в соответствии с выражением (6.5) будет возрастать.
Увеличить поток Ф больше ФНОМ невозможно из-за наступления магнитного насыщения, поэтому полюсное регулирование позволяет регулировать частоту вращения двигателя только вверх от номинального значения. Этот способ регулирования является весьма удобным, экономичным и, поэтому, самым распространенным. Величина тока возбуждения составляет (2-5)% от тока якоря, поэтому потери мощности в реостате РР будут незначительны. Увеличение скорости вращения у двигателей нормального исполнения не должно превышать 50% от номинального значения.
Якорное регулирование путем изменения напряжения, подводимого к якорной обмотке требует введения отдельного источника питания для этой обмотки, так как ток возбуждения IВ, а следовательно, и напряжение, подаваемое на обмотку возбуждения, при этом способе регулирования меняться не должны.
В соответствии с выражением (6.5) частота вращения двигателя при неизменности магнитного потока Ф, т.е. тока возбуждения IВ, прямо пропорциональна напряжению, подаваемому на обмотку якоря.
В лабораторных условиях можно реализовать якорное регулирование путем изменения общего напряжения питания, подаваемого на двигатель. При этом постоянство значения тока возбуждения IВ поддерживается изменением сопротивления цепи возбуждения с помощью регулировочного реостата РР (рис.6.6).
studfiles.net
В.Г. Шуваев
Электромеханические системы
Рекомендовано
редакционно-издательским советом
университета
в качестве учебного пособия
Кострома, 2005
УДК 621-315.
Шуваев В.Г. Электромеханические системы: Учебное пособие. – Кострома: Издательство КГТУ, 2005. -74с.
Учебное пособие содержит краткое изложение основных разделов дисциплины «Электромеханические системы». Оно соответствует государственному образовательному стандарту и предназначено для студентов заочного факультета специальности 220301 «Автоматизация технологических процессов и производств».
Рецензенты: кафедра электропривода и электротехнологий КГСХА;
профессор А.С. Симоненко, КГСХА
© Костромской государственный технологический университет, 2005
Оглавление
Предисловие………………….…………..……………………….………….5
1. Общие представления об электроприводе…………….……..........……….6
1.1. Понятие электропривода………………….……….…..…….….…………..6
2. Механика электропривода……………………………….…….……….............8
2.1. Расчетная схема механической части электропривода ………..................8
2.2. Уравнение движения электропривода …………........................................11
2.3. Установившееся движение электропривода …………….….....................12
2.4. Неустановившееся движение электропривода………………...................15
3. Принципы управления электроприводом………………………..…………...20
3.1. Принципы управления пуском и торможением в резисторных электроприводах…….……………………………………………………..20
3.2. Управление скоростью электропривода…………..………….…….…......23
4. Электропривод с двигателями постоянного тока независимого возбуждения……………….……………………………………….………….23
4.1. Схемы включения и статические характеристики двигателя…...............24
4.2. Энергетические режимы работы двигателя................................................25
4.3. Регулирование скорости вращения двигателей изменением сопротивления в цепи якоря……………….……......................................27
4.4. Расчёт регулировочных резисторов в цепи якоря двигателя…………………………………………….……..........................30
4.5. Регулирование тока и момента при торможении и реверсе двигателя…………….………………………….………………….............31
4.6. Регулирование скорости двигателя изменением магнитного потока.............................................................................................................32
4.7. Регулирование скорости вращения двигателя изменением напряжения, подводимого к якорной цепи.......................................................................35
Регулирование скорости вращения двигателя изменением напряжения
на якоре с помощью импульсных регуляторов напряжения.....................42
4.9. Регулирование скорости вращения двигателя шунтированием якоря...............................................................................................................44
4.10. Регулирование координат привода в системе источник тока-двигатель (ИТ-Д)............................................................................................................49
5. Электропривод с асинхронными двигателями ………….…………………...50
5.1. Схемы включения и замещения асинхронных двигателей…...................50
5.2. Статические характеристики асинхронного двигателя.............................52
5.3. Режимы работы асинхронного двигателя………………………………...56
5.4. Регулирование координат асинхронного двигателя с помощью резисторов….................................................................................................57
5.5. Регулирование координат асинхронного двигателя изменением напряжения…................................................................................................59
Регулирование скорости вращения асинхронного двигателя
изменением частоты питающей сети………….………….……….............60
Регулирование скорости вращения асинхронного двигателя
изменением числа пар полюсов………….…..............................................64
5.8. Торможение асинхронных двигателей……….………….……..................66
5.9. Асинхронные исполнительные двигатели…….………….……................70
6. Защита, блокировки и сигнализация, применяемые в электромеханических системах…...…………….……..........……...71
6.1. Защита электродвигателей………….……….……….….……………… 71
6.2. Блокировки, используемые в схемах электропривода….……………….72
6.3. Сигнализация в схемах электропривода….……….……….….………….72
Заключение………………………………………………………………………..73
Библиографический список…………….……..........………………………..74
Предисловие
При изучении курса «Электромеханические системы» у студентов заочного факультета возникает ряд сложностей, обусловленных отсутствием необходимой литературы в библиотеках города и не достаточным количеством соответствующей учебной и справочной литературы в библиотеке университета. Поэтому возникла необходимость в написании конспекта лекций по курсу «Электромеханические системы». Данное учебное пособие является пространным комментарием к программе курса изданной ранее для студентов заочного факультета специальности 220301.
Учебное пособие снабжено перечнем литературы, которая позволяет дополнить объем курса в соответствии с программой.
Общие представления об электроприводе
Для приведения в движение большинства рабочих машин необходима механическая энергия. Источником механической энергии чаще всего является электропривод, осуществляющий преобразование электрической энергии в механическую [1; 5; 11; 13] .
Понятие электропривода
Электропривод – электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенная для приведения в движение исполнительного органа рабочей машины и управления этим движением.
В некоторых случаях преобразовательное и передаточное устройства могут отсутствовать.
В электроприводе можно выделить два канала: силовой и информационный. По силовому каналу осуществляется передача энергии от источника (сети) к рабочей машине, по информационному – управление потоком энергии, а также сбор и обработка информации о состоянии и работе системы.

Рис. 1.1. Функциональная схема электропривода:
ИС ВУ - информационная система более высокого уровня;
ПЭ - преобразователь электрической энергии;
ЭМП - электромеханический преобразователь;
ПМ - преобразователь механической энергии;
ИО РМ - исполнительный орган рабочей машины;
ИП - информационный преобразователь;
УУ - устройство управления;
ЗУ - задающее устройство
Силовой канал (рис. 1.1) включает в себя различные устройства, такие как преобразователь электрической энергии (ПЭ), электромеханический преобразователь (ЭМП) и преобразователь механической энергии (ПМ).
Преобразователь электрической энергии служит для получения электрической энергии требуемых параметров и позволяет управлять потоком энергии на электромеханическом преобразователе.
ЭМП является основной частью электропривода и предназначен для преобразования электрической энергии в механическую, чаще всего это электродвигатель (ЭД).
Механическая энергия передается рабочей машине (РМ) с помощью ПМ, который обеспечивает согласование вида и скоростей движения рабочих органов машины и ЭМП.
Информационный канал (рис. 1.1) включает в себя информационные преобразователи (ИП), управляющие устройства (УУ) и в ряде случаев каналы связи с ИС ВУ верхнего уровня. УУ на основании информации, получаемой по каналам связи от ИП, от задающего устройства (ЗУ) управляет ПЭ, ЭМП, ПМ. В качестве ПЭ используются управляемые выпрямители, инверторы тока и напряжения, импульсные регуляторы напряжения, регуляторы частоты и напряжения питающей сети. В качестве ЭМП чаще всего используются электродвигатели постоянного тока (ДПТ), асинхронные (АД), синхронные, вентильные, шаговые и линейные, а также другие ЭМП.
В качестве ПМ используются ременные и цепные передачи, передачи винт-гайка, различного вида редукторы, гидравлические и электромагнитные муфты.
УУ являются: кнопки управления, командоаппараты, реле, микропроцессоры, управляющие ЭВМ.
Классификация электропривода (ЭП) достаточно обширна, отметим лишь ее основные направления:
1. ЭП можно классифицировать по назначению: на главный, обеспечивающий основное движение исполнительного органа (ИО) и технологический процесс, и вспомогательный, обеспечивающий вспомогательное движение.
2. По виду привода ИОРМ: на групповой, обеспечивающий основное движение нескольких ИО, и индивидуальный, движение одного ИО.
3. По виду движения: на вращательный и линейный, непрерывного действия и дискретный, реверсивный и нереверсивный.
4. По роду тока: постоянного и переменного тока.
5. По виду ПМ: редукторный и безредукторный, гидравлический и маховиковый.
6. По типу ПЭ: электромашинный, с магнитными усилителями, ионный, тиристорный и транзисторный.
7. По возможностям управляющего устройства: нерегулируемый и регулируемый, автоматизированный и неавтоматизированный.
Общие требования к электроприводу.
1. Надежность (ЭП обязан выполнять заданные функции в оговоренных условиях в течение определенного времени).
2. Точность (обеспечение ЭП необходимой точности).
3. Быстродействие (способность системы быстро реагировать на различные
воздействия).
4. Качество переходных процессов (качество динамики).
5. Энергетическая эффективность (расход электроэнергии на единицу продукции).
6. Совместимость с системой электроснабжения и информационной
системой более высокого уровня.
7. Ресурсоемкость: материалоемкость, энергоемкость, расходы на проектирование, монтаж и т. д.
Механика электропривода
Электропривод представляет собой электромеханическую систему, состоящую из электрической и механической части. В этой главе мы рассмотрим механическую часть ЭП.
Двигатели постоянного тока независимого возбуждения (ДПТ НВ) нашли широкое применение в системах регулируемого ЭП различных машин в связи с возможностью плавного регулирования скорости в широком диапазоне и при линейных механических характеристиках.
Магнитного потока
Скорость двигателя зависит от магнитного потока, причем с увеличением магнитного потока она уменьшается (см. уравнение (4.4)). Следовательно, изменяя ток в цепи возбуждения, изменяем магнитный поток и скорость двигателя [1; 9].
Поскольку электрическая машина рассчитывается на продолжительную работу с номинальной нагрузкой, стремятся оптимально использовать железо машины. Для этой цели рабочая точка обычно выбирается на колене кривой намагничивания (рис. 4.10). Такой выбор рабочей точки ограничивает возможности регулирования скорости двигателя за счет увеличения тока возбуждения. На практике используют только регулирование за счет уменьшения магнитного потока вниз от номинального. В результате скорость регулируется вверх от номинальной. Диапазон регулирования равен 2 (редко 3). Регулирование плавное, с увеличением скорости жесткость характеристик снижается.

Рис. 4.9. Схема управления током возбуждения ДПТ НВ

Рис. 4.10. Кривая намагничивания
Достоинством этого способа является то, что управление двигателем осуществляется за счет изменения сопротивления в слаботочной цепи (рис. 4.9) и, следовательно, потери при регулировании в этом случае минимальны.
Электромеханические характеристики (рис. 4.11) двигателя имеют общую точку, соответствующую Iкз  , так как Iкз от магнитного потока Ф не зависит.
, так как Iкз от магнитного потока Ф не зависит.

Рис. 4.11. Электромеханическая характеристика ДПТ НВ
Механические характеристики показаны на рис. 4.12. Очевидно, что Мкз=kФIкз – зависит от Ф и снижается с его уменьшением.

Рис. 4.12. Механическая характеристика ДПТ НВ
Определяем допустимую нагрузку на искусственных характеристиках. Полагая в уравнении 4.3 I=Iн, получим
 ,
,
где  - поток на искусственной характеристике.
- поток на искусственной характеристике.
В нашем случае Фи<Фн  Мдоп<Мн, то есть ДПТ по условиям нагрева не может быть нагружен на искусственных характеристиках номинальным моментом. Определим, при каких условиях машина используется наиболее эффективно на регулировочных характеристиках. Для этого запишем ЭДС якоря на естественной и искусственной характеристиках:
Мдоп<Мн, то есть ДПТ по условиям нагрева не может быть нагружен на искусственных характеристиках номинальным моментом. Определим, при каких условиях машина используется наиболее эффективно на регулировочных характеристиках. Для этого запишем ЭДС якоря на естественной и искусственной характеристиках:
 ,
,
 .
.
Учитывая, что напряжение, ток и сопротивление якоря постоянны Ее=Еи, следовательно:
 ,
,
где  - скорость на искусственной характеристике при номинальном токе.
- скорость на искусственной характеристике при номинальном токе.
В результате:
 .
.
При этом способе регулирования мы максимально используем двигатель (не перегружая его) при постоянной мощности нагрузки.
Такой способ регулирования в практике ЭП получил название «регулирование с постоянной мощностью». Этот способ регулирования используется в замкнутых системах привода для расширения диапазона регулирования за счет второй зоны. В первой зоне регулирование обычно осуществляется за счет изменения напряжения на якоре (основная зона), а во второй за счет изменения магнитного потока. Использование двухзонного регулирования позволяет в два-три раза увеличить диапазон регулирования.
В простейшем случае регулирование осуществляется за счет изменения регулировочного сопротивления в цепи обмотки возбуждения (рис. 4.9). Величину этого регулировочного сопротивления Rp1 можно найти определив магнитный поток Ф1.
Магнитный поток  , при котором механическая характеристика проходит через точку с координатой (
, при котором механическая характеристика проходит через точку с координатой (  ) (рис. 4.12) при U=Uн; Rд=0, определяется при решении уравнения механической характеристики относительно Ф1*.
) (рис. 4.12) при U=Uн; Rд=0, определяется при решении уравнения механической характеристики относительно Ф1*.
 , (4.11)
, (4.11)
где  ;
;  ;
;  .
.
Величину Iв1* находят по кривой намагничивания (рис. 4.10), предварительно определив соответствующее значение Ф1*.
После этого находят ток возбуждения  и определяют
и определяют  (рис. 4.9).
(рис. 4.9).
 . (4.12)
. (4.12)
Так как
 , (5.20)
, (5.20)
то изменяя  - число пар полюсов, можно регулировать частоту вращения. Число пар полюсов может быть только целым, поэтому регулирование ступенчатое. Изменение не приводит к изменению параметров Д, следовательно, характеристики естественные. Сложность состоит в создании многосекционной обмотки на статоре, переключением которой можно было бы изменять число полюсов.
- число пар полюсов, можно регулировать частоту вращения. Число пар полюсов может быть только целым, поэтому регулирование ступенчатое. Изменение не приводит к изменению параметров Д, следовательно, характеристики естественные. Сложность состоит в создании многосекционной обмотки на статоре, переключением которой можно было бы изменять число полюсов.
Для регулирования этим способом используются только Д с короткозамкнутым ротором, обмотка ротора которых приспосабливается к переключаемой обмотке статора. У Д с фазным ротором пришлось бы делать такую же многосекционную обмотку на роторе, как и на статоре [1; 9].
Рассмотрим схемы включения секций обмотки статора.

Рис. 5.11. Схемы включения секций фазовой обмотки статора АД
Если секционировать статорную обмотку и по-разному включать секции обмотки, то получим разное число пар полюсов на статоре, при этом схемы включения секций могут быть различными. (рис. 5.11) От схемы соединения секций обмоток будет зависеть магнитная индукция в воздушном зазоре Д и развиваемый на валу двигателя момент. Рассмотрим три примера соединения обмоток.

 |
Рис. 5.17. Схема включения АД при магнитном торможении
Магнитное торможение. В настоящее время с использованием тиристорных коммутирующих устройств и тиристорных регуляторов напряжения широкое распространение получило магнитное торможение. Этот способ реализуется при отключении Д от сети и закорачивании обмоток статора контактором  . При этом появляется электрическая цепь и за счет запасенной в Д электромагнитной энергии осуществляется самовозбуждение Д.
. При этом появляется электрическая цепь и за счет запасенной в Д электромагнитной энергии осуществляется самовозбуждение Д.
Особенностью этого способа является быстротечность, которая определяется небольшим временем затухания магнитного поля. Обычно этот режим осуществляется в сочетании с режимом динамического торможения. Такое комбинированное торможение реализуется с помощью тиристорных пускорегулирующих устройств.

Рис. 5.18. Схема включения АД при комбинированном торможении
При отключении Д от сети тиристоры  закрыты, сигнал подается на
закрыты, сигнал подается на  и он замыкает обмотку статора, осуществляя магнитное торможение. Спустя короткое время закрывается , открывается один из тиристоров коммутирующей группы , например
и он замыкает обмотку статора, осуществляя магнитное торможение. Спустя короткое время закрывается , открывается один из тиристоров коммутирующей группы , например  . В результате в одну из обмоток статора подается выпрямительный ток и осуществляется динамическое торможение до остановки Д.
. В результате в одну из обмоток статора подается выпрямительный ток и осуществляется динамическое торможение до остановки Д.
Защита электродвигателей
При нарушениях нормальной работы ЭМС для исключения выхода из строя электрооборудования широко используются различные виды защиты, которая позволяет повысить надежность работы ЭД. Широкое распространение получили следующие виды защиты: нулевая, max и min токовые защиты, тепловая [10; 4].
В необходимых случаях используют специальные виды защиты, предупреждающие о превышении скорости механизма выше допустимого или перемещении исполнительного органа за допустимые пределы.
Нулевая защита обеспечивает защиту от самозапуска двигателя при чрезмерном снижении напряжения или исчезновении его на короткое время. В случае питания цепи управления и силовой цепи от одной сети осуществляется самим контактором или автоматическим выключателем. В случае раздельного питания силовых и управляющих цепей контроль напряжения двигателя осуществляет реле защиты по напряжению (FV), которое включается в силовую цепь.
Максимально-токовая защита обеспечивает защиту двигателя, цепей управления преобразователя от токов короткого замыкания. Обычно осуществляется плавкими вставками, максимально-токовыми реле или автоматическими выключателями с электромагнитными расцепителями.
Тепловая защита обеспечивает защиту двигателя от перегрузки. Осуществляется тепловыми реле или автоматическими выключателями с тепловыми расцепителями (FP).
Минимально-токовая защита используется в ДПТ и в синхронных двигателях для защиты цепи обмотки возбуждения. Осуществляется защита min токовыми реле, называемыми часто реле нулевого тока (KF) (реле обрыва поля). Защита работает на отключение двигателя.
В.Г. Шуваев
Электромеханические системы
Рекомендовано
редакционно-издательским советом
университета
в качестве учебного пособия
Кострома, 2005
УДК 621-315.
Шуваев В.Г. Электромеханические системы: Учебное пособие. – Кострома: Издательство КГТУ, 2005. -74с.
Учебное пособие содержит краткое изложение основных разделов дисциплины «Электромеханические системы». Оно соответствует государственному образовательному стандарту и предназначено для студентов заочного факультета специальности 220301 «Автоматизация технологических процессов и производств».
Рецензенты: кафедра электропривода и электротехнологий КГСХА;
профессор А.С. Симоненко, КГСХА
© Костромской государственный технологический университет, 2005
Оглавление
Предисловие………………….…………..……………………….………….5
1. Общие представления об электроприводе…………….……..........……….6
1.1. Понятие электропривода………………….……….…..…….….…………..6
2. Механика электропривода……………………………….…….……….............8
2.1. Расчетная схема механической части электропривода ………..................8
2.2. Уравнение движения электропривода …………........................................11
2.3. Установившееся движение электропривода …………….….....................12
2.4. Неустановившееся движение электропривода………………...................15
3. Принципы управления электроприводом………………………..…………...20
3.1. Принципы управления пуском и торможением в резисторных электроприводах…….……………………………………………………..20
3.2. Управление скоростью электропривода…………..………….…….…......23
4. Электропривод с двигателями постоянного тока независимого возбуждения……………….……………………………………….………….23
4.1. Схемы включения и статические характеристики двигателя…...............24
4.2. Энергетические режимы работы двигателя................................................25
4.3. Регулирование скорости вращения двигателей изменением сопротивления в цепи якоря……………….……......................................27
4.4. Расчёт регулировочных резисторов в цепи якоря двигателя…………………………………………….……..........................30
4.5. Регулирование тока и момента при торможении и реверсе двигателя…………….………………………….………………….............31
4.6. Регулирование скорости двигателя изменением магнитного потока.............................................................................................................32
4.7. Регулирование скорости вращения двигателя изменением напряжения, подводимого к якорной цепи.......................................................................35
Регулирование скорости вращения двигателя изменением напряжения
на якоре с помощью импульсных регуляторов напряжения.....................42
4.9. Регулирование скорости вращения двигателя шунтированием якоря...............................................................................................................44
4.10. Регулирование координат привода в системе источник тока-двигатель (ИТ-Д)............................................................................................................49
5. Электропривод с асинхронными двигателями ………….…………………...50
5.1. Схемы включения и замещения асинхронных двигателей…...................50
5.2. Статические характеристики асинхронного двигателя.............................52
5.3. Режимы работы асинхронного двигателя………………………………...56
5.4. Регулирование координат асинхронного двигателя с помощью резисторов….................................................................................................57
5.5. Регулирование координат асинхронного двигателя изменением напряжения…................................................................................................59
Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
zdamsam.ru
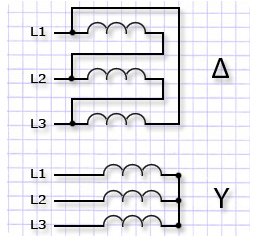
Пуск. Условием пуска двигателя является неравенство Мп>Мст ; если это условие выполняется, то при включении двигателя в сеть ротор приходит в движение и разгоняется до установившегося режима. При пуске ( ω2= 0, S= 1) ток в роторе достигает наибольшего значения (см. (2.15)). Соответственно велики пусковые токи и в обмотке статора, электродинамические усилия, действующие на обмотку, токовые перегрузки в питающей сети. У асинхронных двигателей малой мощности и специальных двигателей с повышенным критическим скольжением обычно кратность пускового тока Кiп ≤ 6 и допускается непосредственное включение двигателя в сеть. Если Кiп > 6 или требуется более сильно ограничить пусковой ток, то приходится применять специальные способы пуска. У двигателей с короткозамкнутым ротором это в основном способы пуска при пониженном напряжении питания. По мере разгона ротора токи в обмотках уменьшаются и напряжение может быть повышено до номинального значения. Недостатком способов пуска при пониженном напряжении является то, что пропорционально квадрату фазного напряжения уменьшается пусковой момент (см. (2.22)). У двигателей с рабочей схемой соединения обмоток статора в “треугольник” возможен пуск переключением со “звезды” на “треугольник”. Пуск происходит при соединении обмоток статора в “звезду”. Фазные напряжения и токи в раз, а линейный ток в √3 раза меньше, чем при прямом пуске на схеме “треугольник”. После разгона обмотки статора переключают на рабочую схему “треугольник”. Однако, как уже отмечалось, уменьшается и пусковой момент – в 3 раза. У двигателей с контактными кольцами чаще применяется р е о с т а т н ы й способ пуска, основанный на изменении добавочного активного сопротивления – пускового реостата R, включаемого в цепь ротора (рис. 2.13,a).
 Рис.2.13
Рис.2.13
Включение в цепь ротора активного сопротивления уменьшает ток в роторе и одновременно, как показано на рис. 2.13,б, увеличивает пусковой момент: при RПD>RПС>RПB>RПА пусковой момент МпD>МпC>МпB>МпA. Пуск осуществляют путем постепенного, обычно ступенчатого, уменьшения сопротивления Rп (жирные линии на рис. 2.13, б). Максимальное значение сопротивления Rп и его ступени ( RпA, RпB, RпC, RпD ) выбирают так, чтобы пики тока не превышали допустимых и пусковой момент Мп был больше момента сопротивления Мст. Однако эти двигатели более сложные и дорогие и их целесообразно применять только при тяжелых условиях пуска, когда необходим максимальный пусковой момент и мала мощность питающей сети. Более современным способом пуска двигателя с контактными кольцами, основанным на изменении добавочного активного сопротивления в цепи ротора, является и м п у л ь с н ы й способ (рис. 2.14,а).
 Рис.2.14
Рис.2.14
Пусковое сопротивление Rп подсоединяют последовательно к обмотке ротора через неуправляемый выпрямитель В. Периодическое подключение Rп производится силовым тиристором Т. Если тиристор Т включен, его сопротивление практически равно нулю, т.е. Rп шунтируется. Если тиристор Т отключен, его сопротивление существенно больше сопротивления Rп и можно считать, что цепь ротора по тиристору разомкнута, а замкнута через сопротивление Rп. Это можно представить как подключение к цепи ротора некоторого пускового сопротивления, среднее значение которого изменяется при изменении относительной продолжительности ε включения тиристора: Rп.cp = Rп (1- ε ) (рис.2.14.б), где ε =tи /Tи. Относительная продолжительность может изменяться от I до 0, соответственно, Rп.cp - от 0 до Rп. Семейство механических характеристик при различной скважности будет иметь такой же вид, что и при обычном реостатном пуске (см. рис. 2.13,6), причем характеристике RпА=0 соответствует ε =1, характеристике RпD=Rп соответствует ε =0. Преимущества рассмотренного импульсного способа по сравнению с обычным реостатным заключается прежде всего в том, что пуск может быть плавным и что способ удобен для реализации автоматического пуска.
Реверсирование двигателя. Изменение направления вращения ротора осуществляется изменением направления вращения поля статора. Для этого достаточно поменять местами выводы двух любых фаз.
Способы регулирования частоты вращения асинхронных двигателей:.
11.2. Регулирование частоты вращения изменением частоты тока в обмотках статора.
11.3. Регулирование частоты вращения изменением числа полюсов обмотки статора.
11.4. Регулирование частоты вращения изменением активного сопротивления в цепи ротора.
11.6. Регулирование частоты вращения нарушением симметрии подводимого напряжения.
Материалы: http://studfiles.net/preview/4021904/page:33/
car-hz.ru