





Пример. 3-х фазный АД с КЗ ротором типа АИР180М4 получает питание от 3-х фазной сети с линейным напряжением U1 = 380 В, частотой 50 Гц.Данные номинального режима двигателя:мощность на валу Р2НОМ = 30 кВт;синхронная частота вращения n1 = 1500 об/мин;номинальное скольжение sНОМ = 2,0 %;коэффициент мощности cosϕНОМ = 0,87;коэффициент полезного действия ηНОМ = 92 %;кратности критического кM = 2,7;пускового моментов кП = 1,7;кратность пускового тока iП = 7;соединение обмоток статора — звезда.
Найти: число пар плюсов; номинальную частоту вращения ротора; номинальное фазное напряжение; номинальный фазный ток обмотки статора; номинальный момент на валу; критическое скольжение и момент двигателя; пусковой момент при номинальном напряжении и снижении его значения на 20%; пусковой ток; емкость конденсаторов для увеличения коэффициента мощности до 1 и начертить электрическую схему двигателя с включением конденсаторов.
Решение:
Асинхронный электродвигатель с короткозамкнутым ротором — это ➠
Определяем число пар полюсов обмотки статора:
Вычисляем номинальная частота вращения ротора:=1500*(1-{2/100})=1470") об/мин.
об/мин.
Находим номинальное фазное напряжение:При соединении в «звезду»  В.
В.
Рассчитываем номинальный фазный ток обмотки статора: А.
А.
Определяем номинальный момент на валу:
 Н⋅м.
Н⋅м.
Вычисляем критическое скольжение:=0,02*(2,7+sqrt{{2,7}^2-1})=0,104.")
Находим критический момент: Н⋅м.
Н⋅м.
Рассчитываем пусковой момент при номинальном напряжении: Н⋅м,при пониженном напряжении:
Н⋅м,при пониженном напряжении: Н⋅м,
Н⋅м,
Определяем пусковой ток: А.
А.
Вычисляем емкость конденсаторов, для повышения коэффициента мощности до 1.
Формула емкости компенсирующих конденсаторов, соединенных по схеме «звезда», имеет вид:}/{2*{pi}*f*{U_1}^2}},") Ф.
Ф.
Формула емкости компенсирующих конденсаторов, соединенных по схеме «треугольник», имеет вид:}/{2*{pi}*f*{U_1}^2}},") Ф,
Ф,
гдеf — частота питающей электросети, Гц;QK — реактивная мощность, вар;PHOM — активная мощность, Вт;U1 — линейное напряжение, В;ϕ1 и ϕ2 — соответственно углы сдвига фаз между напряжением и током до включения и после включения конденсаторной батареи, град. град;
град; град.
град.
Тогда, емкость конденсаторов, при соединении «в звезду» будет равна:}/{2*{pi}*f*{U_1}^2}}=")
 Фили 1124,89 мкФ.
Фили 1124,89 мкФ.
При соединении в «треугольник», емкость конденсаторов будет в три раза меньше, чем при соединении «в звезду» и равняется:}/{2*{pi}*f*{U_1}^2}}=")
 Фили 374,96 мкФ.
Фили 374,96 мкФ.
В схеме соединения конденсаторов в «треугольник» емкость батареи получатся в три раза меньше, зато напряжение на конденсаторах в  больше, если сравнивать со схемой соединения конденсаторов в «звезду».
больше, если сравнивать со схемой соединения конденсаторов в «звезду».
Чертим схему включения конденсаторов для повышения коэффициента мощности электросети с асинхронным двигателем.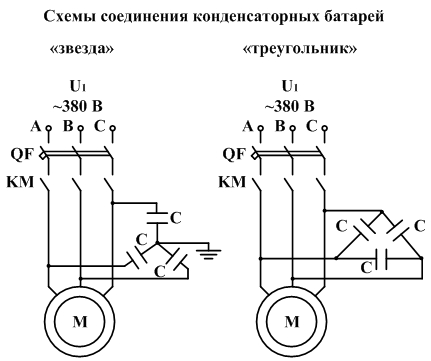
Подробно о реактивной мощности читайте здесь.
electrichelp.ru
1.1. Число пар полюсов двигателя.

где n – синхронная частота вращения магнитного поля статора двигателя, об/мин f =50 Гц – частота питающего напряжения.
– синхронная частота вращения магнитного поля статора двигателя, об/мин f =50 Гц – частота питающего напряжения.
1.2. Высота оси вращения (предварительно) h, мм

Рис. 1. Высота оси вращения h двигателей серии 4А различной мощности и частоты вращения:  – со степенью защитыIP 44; б – с IP 23.
– со степенью защитыIP 44; б – с IP 23.
1.3. Наружный диаметр статора по ГОСТ 13267-73
Таблица 1.
| h, mm | 112 | 132 | 160 | 180 | 200 | 225 | 250 | 280 | 315 | 355 |
| D | 0,191 | 0,225 | 0,272 | 0,313 | 0,349 | 0,392 | 0,437 | 0,530 | 0,590 | 0,660 |
1.4. Внутренний диаметр статора

Таблица 2.
| Число пар полюсов | 1 | 2 | 3 |
| k | 0.5 | 0.6 | 0.7 |
1.5. Полюсное деление


Рисунок 2.
1.6. Расчетная мощность


1.7. Выбираем электромагнитные нагрузки А и В по диаметру Dа для степени защиты IР44(закрытое обдуваемое) согласно рисунка 2.
1.8. Расчетная длина воздушного зазора

где 
 –коэффициент формы кривой индукции при синусоидальном распределении индукции
–коэффициент формы кривой индукции при синусоидальном распределении индукции
 –обмоточный коэффициент для основной гармонической магнитного поля, обычно
–обмоточный коэффициент для основной гармонической магнитного поля, обычно  =0,92÷0,96
=0,92÷0,96
1.9. Определяем отношение

сравниваем с рекомендуемыми значениями на рисунке 3.

Рис. 3.:  – со степенью защитыIP 44; б – с IP 23.
– со степенью защитыIP 44; б – с IP 23.
Если λ выше рекомендуемого, то высоту оси вращения двигателя выбираем следующую из стандартного ряда таблицы 2. Повторяем расчеты п. 1.3-1.9.
2.1. Выбираем зубцовое деление статора по рисунку 4.

Рис. 4. Зубцовое деление статора асинхронных двигателей со всыпной обмоткой:
1 – при h  90 мм
90 мм
2 – при h= 90 250 мм
250 мм
3 – при h 280 мм
280 мм
2.2. Число пазов статора
Число пазов статора в любой обмотке АД должно быть кратно числу фаз m.


Выбор окончательного числа пазов проводят с четкой увязкой получаемого при этом q,  (см. таблицу3).
(см. таблицу3).
Таблица 3.
| Число пар полюсов | Число пазов статора | Число пазов ротора |
| 1 | 24 | 19, 32. |
| 30 | 22, 38. | |
| 36 | 26, 28, 44, 46. | |
| 42 | 32, 33, 34, 50, 52. | |
| 48 | 38, 40, 56, 58. | |
| 2 | 24 | 17, 32. |
| 36 | 26, 44, 46. | |
| 42 | 52, 54. | |
| 48 | 34, 38, 56, 58, 62, 64. | |
| 60 | 50, 52, 68, 70, 74. | |
| 72 | 62, 64, 80, 82, 86. | |
| 3 | 36 | 26, 46. |
| 54 | 44, 64, 66, 68. | |
| 72 | 56, 58, 62, 82, 84, 86, 88. | |
| 90 | 74, 76, 78, 80, 100, 102, 104. | |
| 4 | 48 | 36, 44, 62, 64. |
| 72 | 56, 58, 86, 88, 90. | |
| 84 | 66, 70, 98, 100, 102, 104. | |
| 96 | 78, 82, 110, 112, 114. | |
| 5 | 60 | 44, 46, 74, 76. |
| 90 | 68, 74, 104, 108, 112. | |
| 120 | 86, 92, 96, 102, 106, 136, 140, 144. | |
| 6 | 72 | 56, 64, 80, 88. |
| 90 | 68, 74, 88, 98, 106, 108, 110. | |
| 108 | 86, 92, 100, 116, 124, 130, 132. | |
| 144 | 124, 136, 152, 160, 164, 168, 172. |
2.3. Число пазов на полюс и фазу должно быть целым для большинства АД.

где m – число фаз;
2.4. Уточняем зубцовое деление

Окончательное значение t1 не должно выходить за пределы, указанные в таблице 6.
2.5. Число эффективных проводников в пазу  .
.

где а – число параллельных ветвей обмотки; принимают таким, чтобы  было целым, а в двухслойной обмотке кратным двум.
было целым, а в двухслойной обмотке кратным двум.
Чтобы округление не было слишком грубым, вначале определяют предваритель-ное число эффективных проводников в пазу U , при условии, что а=1.
, при условии, что а=1.

где А – линейная нагрузка, принятая ранее, А/м D – внутренний диаметр статора, м I1н – номинальный ток обмоток статора, А

Полученное значения U не округляется до целого, а находят такое число параллельных ветвей обмотки, чтобы число эффективных проводников в пазу удовлетворяло условиям, о которых говорилось раньше.
не округляется до целого, а находят такое число параллельных ветвей обмотки, чтобы число эффективных проводников в пазу удовлетворяло условиям, о которых говорилось раньше.
2.6. Число витков фазы обмотки.

2.7. Линейная нагрузка.

2.8. Индукция в воздушном зазоре.


Если полученное значение B выходит за пределы рисунка 1 более чем на 5%, то выбирается другое значение Uп(см. пункт 2.5)
выходит за пределы рисунка 1 более чем на 5%, то выбирается другое значение Uп(см. пункт 2.5)
2.9. Проверить чтобы А и В находились в допустимых пределах согласно рисунка 1.
находились в допустимых пределах согласно рисунка 1.
2.10. Плотность тока в обмотке статора (предварительно)

(Aj ) выбираем по рис. 6-16 (б и в), стр. 173, Копылов, Проектирование
) выбираем по рис. 6-16 (б и в), стр. 173, Копылов, Проектирование
В данном методическом пособии (Aj ) приведены на рисунке 5.
) приведены на рисунке 5.

Рисунок 5.
2.11. Сечение эффективного проводника (предварительно) определяют,
исходя из тока одной параллельной ветви и допустимой плотности тока в обмотке

где I1н, номинальный ток обмотки статора (см. пункт 2.5)
2.12. Исходя их эффективного сечения проводника по таблице №4 определяем обмоточный провод с сечением qэл.

n – кол-во элементарных проводников, подбирается такое, чтобы суммарная площадь сечения была близка к расчетному сечению эффективного проводника;
– кол-во элементарных проводников, подбирается такое, чтобы суммарная площадь сечения была близка к расчетному сечению эффективного проводника;
q – сечение элементарного проводника подбирается по конкретной марке провода.
– сечение элементарного проводника подбирается по конкретной марке провода.
2.13. Плотность тока в обмотке статора (окончательно)

studfiles.net
Обратная связь ПОЗНАВАТЕЛЬНОЕ Сила воли ведет к действию, а позитивные действия формируют позитивное отношение Как определить диапазон голоса - ваш вокал Как цель узнает о ваших желаниях прежде, чем вы начнете действовать. Как компании прогнозируют привычки и манипулируют ими Целительная привычка Как самому избавиться от обидчивости Противоречивые взгляды на качества, присущие мужчинам Тренинг уверенности в себе Вкуснейший "Салат из свеклы с чесноком" Натюрморт и его изобразительные возможности Применение, как принимать мумие? Мумие для волос, лица, при переломах, при кровотечении и т.д. Как научиться брать на себя ответственность Зачем нужны границы в отношениях с детьми? Световозвращающие элементы на детской одежде Как победить свой возраст? Восемь уникальных способов, которые помогут достичь долголетия Как слышать голос Бога Классификация ожирения по ИМТ (ВОЗ) Глава 3. Завет мужчины с женщиной
Оси и плоскости тела человека - Тело человека состоит из определенных топографических частей и участков, в которых расположены органы, мышцы, сосуды, нервы и т.д.
| Трехфазный асинхронный двигатель с коротко-замкнутым ротором серии 4А имеет технические данные, приведенные в табл. 4. Определить высоту оси вращения h, число полюсов 2р, скольжение при номинальной нагрузке sH0M, момент на валу Мном, начальный пусковой Мпи максимальный М maxмоменты, номинальный и пусковой токи IH0M и Iп в питающей сети при соединении обмоток статора звездой и треугольником.
Пример расчета. Асинхронный трехфазный двигатель с короткозамкнутым ротором марки А02-82-6 имеет следующие паспортные данные: напряжение U=220 /380 В, номинальная мощность Р2 = 40 кВт, частота вращения п2=980 об/мин, КПД η=91,5%, коэффициент мощности cos φ=0,91, кратность пускового тока КI = 5, кратность пускового момента KM = l,l, перегрузочная способность двигателя λ= 1,8. Определить число пар полюсов, номинальное скольжение, номинальные максимальный и пусковой вращающие моменты, номинальный и пусковой токи двигателя при соединении обмотки статора в «треугольник» и «звезду». Возможен ли пуск нагруженного двигателя, если подводимое напряжение на 10% ниже номинального и пуск производится переключением обмоток статора со «звезды» на «треугольник» от сети с напряжением U=220. В? Решение. Для определения числа пар полюсов можно воспользоваться маркировкой двигателя, частотой вращения магнитного поля или ротора. Если известна маркировка, то последнее число в марке двигателя означает количество полюсов. В данном двигателе шесть полюсов; следовательно, три пары. При известной частоте вращения магнитного поля число пар полюсов определяем по формуле p = 60 f / n1. По этой же формуле определяем число пар полюсов, если задана частота вращения ротора, но в этом случае получаемый результат округляем до ближайшего целого числа. Например, для заданных условий р = 60//п2 = 3000/980 = 3,06; отбросив сотые доли, получаем число пар полюсов двигателя—3. Частота вращения магнитного поля n1 =60 f / p=3000/3 = 1000 об/мин. Номинальное значение скольжения
Критическое скольжение s кр= sНОМ [λ+√λ2 -1] Мощность, потребляемая двигателем, p1= P2/η = 40000/0,915 = 43715 Вт. Номинальный вращающий момент двигателя МНОМ = 9,55 Р2 / n2 = 9,55-40000/980 = 389,8 Н-м. Максимальный момент Мmax = λ*.М ном = 1,8 • 389,8 = 701,6 Н • м. Пусковой момент МП = КММНОМ = 1,1 • 389,8 = 428,7 Н • м. Для определения фазных, линейных и пусковых токов (фазными являются токи в обмотках статора, линейными—токи в подводящих проводах) нужно учесть следующее: если двигатель рассчитан на работу от сети переменного тока с напряжением, 220/380 В, то это значит, что каждая фаза обмотки статора рассчитана на напряжение 220 В. Обмотку необходимо включить по схеме «треугольник», если в сети линейное напряжение U=220 В, и по схеме «звезда», если в сети линейное напряжение U=380 В. Определяем фазный, линейный и пусковой токи при линейном напряжении U=220 В и соединении обмотки статора по схеме «треугольник». Фазный ток в обмотке статора
Токи: линейный Iл= 1,73 -72,8 =125,9 А; Пусковой ток . Iп = KI * IЛ = 5*125,9 = 629,5 А. Найдем значения фазных, линейных и пусковых токов, если обмотки статора включены по схеме «звезда» и подключены к сети с линейным напряжением U=38О В. Значение фазного тока найдем из формулы мощностей для линейных значений токов и напряжений
При соединении обмоток в «звезду» линейный ток
пусковой ток 1П = КI * IЛ = 5 -73 = 365 А. Из сопоставления фазных, линейных и пусковых токов при различных соединениях обмоток можно заметить, что фазные токи оказались практически одинаковыми, а линейные и пусковые — различными. Для определения возможности пуска в ход двигателя, находящегося под номинальной нагрузкой и пониженным напряжением, необходимо определить пусковой вращающий момент при пониженном напряжении. В соответствии с формулой M=CU2вращающий момент двигателя пропорционален квадрату подводимого напряжения. При понижении напряжения на 10% вращающий момент M'=C Uном = C{0,9UHOM)2 = 0,81 х Маоы=0,81x 389,8 = 315,74 Н • м. Соответственно пусковой момент М'п =КМ* М'= 1,1*315,74 = 347,3 Н-м, что меньше тормозного момента на валу на 42,5 Н • м, т.е. пуск невозможен. Для понижения пусковых токов часто пуск асинхронных двигателей осуществляют при пониженном напряжении. Двигатели, работающие при соединении обмоток статора по схеме «треугольник», пускают без нагрузки путем переключения обмоток со «звезды» на «треугольник». Определить пусковой момент двигателя при данном виде пуска. В момент пуска обмотки находятся под напряжением UФ= Uл/ пусковой момент при переключении обмоток М п = C*U2 = C (0,57UHOM)2 = 0.33CU ном =128,8 Н-м, т. е. в три раза меньше номинального значения. таблица 4
Задача № 5
|
megapredmet.ru
Реферат
Ускорение научно-технического прогресса требует всемерной автоматизации производственных процессов. Для этого необходимо создать электрические машины, удовлетворяющие по своим показателям и характеристикам, весьма разнообразным требованиям различных отраслей народного хозяйства.
Процесс создания электрических машин включает в себя проектирование, изготовление и испытание. В настоящем курсовом проекте рассматриваются вопросы проектирования электрических машин.
Под проектированием электрических машин понимается, расчет размеров отдельных ее частей, параметров обмоток, рабочих и других характеристик машины, конструирование машины в целом, а также ее отдельных деталей и сборочных единиц, оценка технико-экономических показателей спроектированной машины, включая показатели надежности.
Основные тенденции в развитии электромашиностроения.
Усовершенствование методов расчета машин;
Улучшение конструкции машин с придачей узлам и деталям эстетических и рациональных форм, при обеспечении снижения их массы и прочности. Повышение надежности машин, в частности за счет широкого распространения машин закрытого исполнения, в которых для улучшения охлаждения используют обдув наружной поверхности.
Наиболее применяемые степени защиты:
IP22- машина, защищенная от попадания твердых тел размером более 12мм и от капель воды.
IP23- машина, защищенная от попадания твердых тел размером более 12мм и от дождя.
IP44- машина, защищенная от попадания твердых тел размером более 1мм и от водяных брызг (закрытая машина).
Энергетические показатели машин (КПД и cos) в основном сохраняются на одном уровне.
Особо следует отметить повышение технологичности конструкции, осуществляемой широкой унификацией узлов и деталей машин и придания им форм, содействующих возможности применения прогрессивных технологических процессов и усовершенствованного оборудования – автоматических линий, агрегатных станков полуавтоматов, конвейеров и др.
Введение
Асинхронные двигатели - наиболее распространенный вид электрических машин, потребляющих в настоящее время около 40% всей вырабатываемой электроэнергии. Их установленная мощность постоянно возрастает.
Потребности народного хозяйства удовлетворяются главным образом двигателями основного исполнения единых серий общего назначения, то есть применяемых для привода механизмов, не предъявляющих особых требований к пусковым характеристикам, скольжению, энергетическим показателям, шуму и т.п. Вместе с тем в единых сериях предусматривают также электрические и конструктивные модификации двигателей, модификации для разных условий окружающей среды, предназначенные для удовлетворения дополнительных специфических требований отдельных видов приводов и условий их эксплуатации. Модификации создаются на базе основного исполнения серий с максимально возможным использованием узлов и деталей этого исполнения.
В некоторых приводах возникают требования, которые не могут быть удовлетворены двигателями единых серий. Для таких приводов созданы специализированные двигатели, например электробуровые, краново-металлургические и др.
Электромашиностроение прошло большой путь развития, начиная от простейшей моделей, созданных полтора века назад на основе открытий М. Фарадея (1821- 1831), до современных электродвигателей и генераторов.
В настоящее время отечественной промышленностью изготовляются асинхронные двигатели мощностью от 0,12 до 400кВт единой серии 4А и мощностью свыше 400 до 1000 кВт – серии 4А, а также серии А1- мощностью от 0,04 до 315 кВт.
Новые серии разработаны с учетом международных норм- рекомендаций МЭК. В области асинхронных двигателей разработка серий проводилась в соответствии с согласованными общими рекомендациями по унифицированной увязки установочных размеров со шкалой мощностей.
1. Выбор главных размеров и расчёт обмотки статора
Расчёт асинхронных машин начинают с определения главных размеров: внутреннего диаметра статора
 и расчётной длины воздушного зазора
и расчётной длины воздушного зазора  . Наиболее целесообразным является выбор главных размеров, основанный на предварительном определении высоты оси вращения и увязке этого размера с наружным диаметром статора и последующем расчёте внутреннего диаметра статора.
. Наиболее целесообразным является выбор главных размеров, основанный на предварительном определении высоты оси вращения и увязке этого размера с наружным диаметром статора и последующем расчёте внутреннего диаметра статора. Высоту оси вращения h и соответствующий ей наружный диаметр статора
 определяют по таблицам 1 и 2 приложения для заданных номинальной мощности
определяют по таблицам 1 и 2 приложения для заданных номинальной мощности , числа пар полюсов
, числа пар полюсов  и исполнения двигателя:
и исполнения двигателя:  .
. Внутренний диаметр статора
определяется:  ,
, 
где KD – коэффициент, определяется по таблице 3 приложения .
Полюсное деление, м:


Расчётная мощность, кВт:


где Р2 – мощность на валу двигателя, кВт;
kЕ – отношение ЭДС обмотки статора к номинальному напряжению, определяется по рисунку 1 приложения
Предварительные значения η и со sφ могут быть взяты по кривым приложения (рисунок 2 и 3), построенным по данным двигателей серии 4А.
Предварительный выбор электромагнитных нагрузок А , А/м и Вδ , Тл должен быть проведён особо тщательно, т.к. они определяют не только расчётную длину сердечника но и в значительной степени характеристики машины. Рекомендации по выбору А и Вδ, представленные в виде кривых на рисунках 4 и 5 приложения , основаны на данных изготовленных двигателей.
Коэффициент полюсного перекрытия αδ и коэффициент формы поля kв предварительно принимают равными:


Предварительное значение обмоточного коэффициента
 выбирают в зависимости от типа обмотки статора. Для однослойных обмоток =0,95÷0,96; для двухслойных обмоток при 2р=2 принимают
выбирают в зависимости от типа обмотки статора. Для однослойных обмоток =0,95÷0,96; для двухслойных обмоток при 2р=2 принимают  =0,90÷0,91, при 2р>2 =0,91÷0,92.
=0,90÷0,91, при 2р>2 =0,91÷0,92. Расчётная длина воздушного зазора, м:


где Ω – синхронная угловая скорость вала двигателя, рад/с:


где
 - синхронная частота вращения, об/мин;
- синхронная частота вращения, об/мин;  - частота питания, Гц.
- частота питания, Гц. Критерием правильности выбора главных размеров D и
 служит отношение
служит отношение  , которое должно находиться в пределах, показанных на рисунке 6 приложения для принятого исполнения машины. Если λ оказывается чрезмерно большим, то следует повторить расчёт для ближайшей из стандартного ряда большей высоты оси вращения h. Если λ слишком мало, то расчёт повторяют для следующей в стандартном ряду меньшей высоты h.
, которое должно находиться в пределах, показанных на рисунке 6 приложения для принятого исполнения машины. Если λ оказывается чрезмерно большим, то следует повторить расчёт для ближайшей из стандартного ряда большей высоты оси вращения h. Если λ слишком мало, то расчёт повторяют для следующей в стандартном ряду меньшей высоты h. 
Для расчёта магнитной цепи помимо
 необходимо определить полную конструктивную длину и длину стали сердечников статора (
необходимо определить полную конструктивную длину и длину стали сердечников статора ( и
и  ) и ротора (
) и ротора ( и
и  ). В асинхронных двигателях, длина сердечников которых не превышает 250-300 мм, радиальных вентиляционных каналов не делают. Для такой конструкции ==
). В асинхронных двигателях, длина сердечников которых не превышает 250-300 мм, радиальных вентиляционных каналов не делают. Для такой конструкции == . В более длинных машинах сердечники подразделяют на отдельные пакеты, разделённые между собой радиальными вентиляционными каналами.
. В более длинных машинах сердечники подразделяют на отдельные пакеты, разделённые между собой радиальными вентиляционными каналами. Стандартная ширина радиального воздушного канала между пакетами
 мм. Число пакетов
мм. Число пакетов  и их длина
и их длина  связаны с расчётной длиной соотношением:
связаны с расчётной длиной соотношением: mirznanii.com
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ РФ
ОРЛОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра: «Электрооборудование и энергосбережение»
КУРСОВОЙ ПРОЕКТ
по дисциплине «Электрические машины»
для специальности 140610
«Электрооборудование и электрохозяйство предприятий, организаций и учреждений»
Тема: Расчет асинхронного электродвигателя
Выполнил
Группа
Руководитель Загрядцкий В.И.
Орел, 2007
Количество пар полюсов

Высота вращения оси
h=180мм
Вращающий момент на валу

По значению h определяю предельно допустимые значения Dн1 max , припуски на штамповку
 :
: Dн1 max =322мм
=7мм Двигатель с h=180мм выполняется с литой станиной.
Внутренний диаметр сердечника статора

Коэффициент k н =0,945
Определяю предварительно
 и
и  =0,87, =0,82
=0,87, =0,82 Расчетная мощность

 Вт
Вт Расчетная длина сердечника

 - обмоточный коэффициент
- обмоточный коэффициент  и
и  - электромагнитные нагрузки
- электромагнитные нагрузки 

Выбираю форму паза – трапецеидальная полузакрытая, тип обмотки – двухслойная из проводов круглого поперечного сечения.

Определяю длину сердечника при отсутствии радиальных вентиляционных каналов


 ,
,  ,
, 
 ,
, условие выполняется
Собирается из отдельных отштампованных листов электротехнической стали толщиной 0.5мм, имеющих изоляционные покрытия для уменьшения потерь в стали от вихревых токов.
Применяю холоднокатаную изотропную электротехническую сталь марки 2013.
Использую изолирование листов оксидированием.
Коэффициент заполнения стали

Количество пазов на полюс и фазу

Количество пазов сердечника статора

Сердечник ротора
Собирается из отдельных отштампованных листов электротехнической стали толщиной 0.5мм, имеющих изоляционные покрытия для уменьшения потерь в стали от вихревых токов.
Применяю холоднокатаную изотропную электротехническую сталь марки 2013.
Использую изолирование листов оксидированием.
Коэффициент заполнения стали
Для уменьшения влияния моментов высших гармоник на пусковые и виброакустические характеристики машины ротор имеет скос пазов
 на одно зубцовое деление статора
на одно зубцовое деление статора  ; при этом
; при этом  .
. Воздушный зазор между статором и ротором:

Наружный диаметр сердечника ротора

Внутренний диаметр листов ротора

Долина сердечника ротора

Количество пазов
 выбирается в зависимости от
выбирается в зависимости от  и наличия скоса пазов
и наличия скоса пазов 
Принимаю обмотку из круглого провода, двухслойную укладываемую в трапецеидальные полузакрытые пазы, марки ПЭТ-155
Обмотка шестизонная; каждая зона равна 60 эл. град.
Коэффициент распределения



Укороченный шаг обмотки по пазам

Коэффициент укорочения



Обмоточный коэффициент

Предварительно значение магнитного потока

Предварительно количество витков в обмотке фазы

Предварительно количество эффективных проводников в пазу

Количество параллельных ветвей обмотки статора



Уточненное значение количества витков в обмотке фазы

Уточненное значение магнитного потока

Уточненное значение индукции в воздушном зазоре

Предварительное значение номинального фазного тока

Уточненная линейная нагрузка статора

Среднее значение магнитной индукции в спинке статора

Зубцовое деление по внутреннему диаметру статора

Значение магнитной индукции в зубцах статора

Ширина зубца

Припуски на сборку сердечника статора и ротора по ширине
 и высоте
и высоте  составляют 0.2мм.
составляют 0.2мм. Определяю размеры трапецеидальных пазов (рис 1)

Рис. 1. Трапецеидальный полузакрытый паз статора.
Высота спинки статора

Высота паза

Большая ширина паза

Ширина шлица

Высота шлица

Меньшая ширина паза

Проверка правильности определения b 1 и b 2 исходя из требования b з1 = const
mirznanii.com
Содержание
Стр.
Содержание…………………………………………………………………… 2
Техническое задание ………………………………………………………. 3
1. Расчет главных размеров двигателя ……………………………………… 4
2. Расчет статора ……………………………………………………………….6
2.1 Станины ……………………………………………………………….. 6
2.2 Обмотки статора ………………………………………………………. 7
2.3 Зубцовой зоны …………………………………………………………8
3. Расчет ротора ……………………………………………………………….11
4. Расчет магнитной цепи ……………………………………………………15
4.1 Магнитное напряжение зазора ………………………………………. 16
4.2 Магнитное напряжение зубцовой зоны статора …………………… 16
4.3 Магнитное напряжение зубцовой зоны ротора …………………….. 17
Библиографический список ……………………………………………….18
Техническое задание:
Рассчитать асинхронный трехфазный двигатель с короткозамкнутым ротором :
номинальная мощность Р2Н = 7,5кВт;
номинальное напряжение UН = 220 В;
номинальный КПД ηн=87,5 %;
номинальный коэффициент мощности cos φн=0,86 о. e.;
число полюсов 2p=4;
скорость вращения ротора n1=1500 об/мин;
режим работы - S1, продолжительный;
серия 4А;
степень защиты IP44.
Степень защиты от воздействия окружающей среды IP44:
Оболочка (корпус) защищает двигатель от попадания внутрь и касания с токоведущими и движущимися частями твердых тел с диаметром более 1 мм. Защита от попадания внутрь корпуса брызг воды любого направления.
1 РАСЧЕТ ГЛАВНЫХ РАЗМЕРОВ ДВИГАТЕЛЯ.

Рис. 1- К выбору внешнего диаметра статора DА.
Главными размерами асинхронной машины называют внутренний диаметр D1и расчетную длину lδмагнитопровода статора. Эти размеры связаны с расчетной мощностью Р', электромагнитными нагрузками и А и Bδ, угловой механической скоростью вращения магнитного поля Ω1 с помощью машинной постоянной Арнольда СА, характеризующей использование внутреннего объема статора на единицу расчетного момента:

Из таблицы 2.2 [1] определяем высоту оси вращения h=132мм.
Максимально возможный внешний диаметр сердечника статора DAMAX, допускаемый конструкцией и технологией изготовления двигателя:
DAMAX=2(h-h2min)=2(132-13,844)=236 (мм),
Где h2min – минимально допустимое расстояние от нижней точки наружной поверхности сердечника статора до опорной плоскости лап, определяемое условиями крепления двигателя и защиты нижней части машины от случайных повреждений:
h2min=  +h3=8.6+5.244=13.844 (мм)
+h3=8.6+5.244=13.844 (мм)
Из таблицы 5.1 [1] выбираем внешний диаметр статора для h=132мм - DА=225мм.
Внутренний диаметр сердечника статора D1 определяется по выбранному внешнему диаметру DА приближенно:
D1 = DА• kD
Значение коэффициента kDв зависимости от числа полюсов берем из таблицы 5.2 [1].
kD=0,68
D1=0,68*225=153 (мм)
Полюсное деление (число пазов приходящиеся на один полюс):
 (мм)
(мм)
Расчетная мощность:

Значение коэффициента kЕ , равный отношению ЭДС обмотки статора к номинальному напряжению, приближенно определяем по рис. 5.2 [1]. kЕ=0,971
 (В·А)
(В·А)
Электромагнитные нагрузки – максимальная индукция в зазоре и линейная нагрузка статора выбираем по графикам электромагнитных нагрузок (рис. 5.3 а [1]):
Bδ= 0,87 Тл, A=26*103 А/м
Коэффициенты полюсного перекрытия  и формы поля
и формы поля  , характеризующие уплощения кривой индукции в зазоре за счет насыщения зубцов сердечников статора и ротора, задаются сведущие:
, характеризующие уплощения кривой индукции в зазоре за счет насыщения зубцов сердечников статора и ротора, задаются сведущие:


Обмоточный коэффициент для однослойной обмотки равен  .
.
Синхронная скорость вращения двигателя (угловая механическая скорость вращения магнитного поля):
 (рад/с)
(рад/с)
Расчетная длина магнитопровода:
 (м)
(м)
Отношение  находится в пределах допустимых значений рис. 5.5 а [1].
находится в пределах допустимых значений рис. 5.5 а [1].
2 РАСЧЕТ СТАТОРА.
2.1 Расчет станины
Станины выполняются в форме цилиндра из серого чугуна с продольными ребрами на внешней поверхности.
Средняя толщина стенки литой станины:

Внешний диаметр станины:
DСТ=DА+2=225+2*8,6=242,2 мм.

Рис. 1 – Сечение ребер станины с радиальным оребрением.
Из таблицы 4.2 б [1] для h определяем:
Шаг оребрения tp=15,8мм,
Средняя высота ребра hр=24мм,
Радиус rр=1,5мм,
К=0,58-0,6, βр=4
Количество ребер на поверхности литой станины:
Np≈K =
=
Ширина верхней части и основания ребра:


Наибольший размер станины по вершинам ребер:
DСТР=DСТ+2 hр =242,2+2*24=290,2мм
Минимально допустимое расстояние от нижней точки литой станины до опорной плоскости лап:

2.2 Расчет обмотки статора
Статорные обмотки асинхронных двигателей общего назначения выполняют распределенными, то есть состоящими из большого числа катушек, укладываемых в пазы на внутренней поверхности сердечника статора. Устройство и способ изолирования обмотки зависит от номинальных мощности и напряжения, условий эксплуатации машины и достигнутого уровня технологии электромашиностроения.
Требуемое расчетное сечение эффективного проводника получают параллельным соединением нескольких элементарных проводников меньшего сечения. Для уменьшения числа элементарных проводников увеличивают число параллельных ветвей обмотки.
Схема обмотки статора определяет положение катушек в пазах сердечника
Тип обмотки – однослойная концентрическая. Толщина изоляции 0,3 мм.

Рис. 2 – Сечение пазовой части обмотки.
Число пазов статора:
Значения пазового (зубцового) деления  определяем по рис. 6.1 [1]: 0,009м и 0,014м
определяем по рис. 6.1 [1]: 0,009м и 0,014м


Принимаем  =48.
=48.
Число пазов на полюс и фазу:

Пазовое деление статора (окончательное):
 (мм)
(мм)
Число эффективных проводников в пазу статора (α1=1):


 (А)
(А)

Число последовательно соединенных витков фазы статора:

Линейная нагрузка:
 (А/м)
(А/м)
Магнитный поток полюсного деления:
 (Вб)
(Вб)
Амплитуда индукции в зазоре:
Bδ= (Тл)
(Тл)
Плотность тока в обмотке статора (допустимая):
 (А/м2)
(А/м2)
 выбираем по графику рис. 6.2 а [1]. =180*109 А2/м2
выбираем по графику рис. 6.2 а [1]. =180*109 А2/м2
vunivere.ru
В электроприводе производственного агрегата используется асинхронный двигатель трехфазного тока с короткозамкнутым ротором. Двигатель работает в номинальном режиме при линейном напряжении Uл = 380 В и при промышленной частоте f = 50 Гц.Используя данные электродвигателя, выбрать сечение питающих проводов и номинальный ток плавких вставок предохранителей. Построить график зависимости вращающего момента от скольжения М = f(s), предварительно вычислив номинальное и максимальное значения момента, пусковой момент, а также значения вращающего момента при скольжении, равном 0,2; 0,4; и 0,6. Смотреть видео: асинхронный двигатель Исходные данные:Iпуск/Iном = 6,5; Ммакс/Мно = 2,0; КПДном = 0,82; сosjном = 0,83;Тип двигателя - 4А80А2У3; Рном = 1,5 кВТ; Sном = 7,0 %.
Решение Заказать у нас работу!
 По найденному значению тока из табл. Приложения 2 выбираем сечение питающего провода для двигателя. При номинальном токе 3,35 А подойдут провода сечением 2,5 кв. мм трехжильные медные с резиновой или полихлорвиниловой изоляцией или трехжильные алюминиевые провода с резиновой или полихлорвиниловой изоляцией.
По найденному значению тока из табл. Приложения 2 выбираем сечение питающего провода для двигателя. При номинальном токе 3,35 А подойдут провода сечением 2,5 кв. мм трехжильные медные с резиновой или полихлорвиниловой изоляцией или трехжильные алюминиевые провода с резиновой или полихлорвиниловой изоляцией.

Если принять, что двигатель работает с тяжелыми условиями пуска (большая длительность разгона, частые пуски): Из ряда стандартных плавких вставок на номинальные токи 6, 10, 15, 20, 25, 30, 50, 60, 80, 100, 120, 150 А выбираем вставку на номинальный ток 15 А.
Из ряда стандартных плавких вставок на номинальные токи 6, 10, 15, 20, 25, 30, 50, 60, 80, 100, 120, 150 А выбираем вставку на номинальный ток 15 А.
В обозначении двигателя (4А80А2У3) после буквы "А" указано количество полюсов, количество пар полюсов вдвое меньше, т.е. в данном случае Р = 1.






Из двух полученных значений по условию устойчивой работы двигателя  выбираем
выбираем  .
.





freewriters.narod.ru
 , м
, м =D/D
=D/D

 Отёска стен и прирубка косяков - Когда на доме не достаёт окон и дверей, красивое высокое крыльцо ещё только в воображении, приходится подниматься с улицы в дом по трапу.
Отёска стен и прирубка косяков - Когда на доме не достаёт окон и дверей, красивое высокое крыльцо ещё только в воображении, приходится подниматься с улицы в дом по трапу. Дифференциальные уравнения второго порядка (модель рынка с прогнозируемыми ценами) - В простых моделях рынка спрос и предложение обычно полагают зависящими только от текущей цены на товар.
Дифференциальные уравнения второго порядка (модель рынка с прогнозируемыми ценами) - В простых моделях рынка спрос и предложение обычно полагают зависящими только от текущей цены на товар.



 = 220/1,73 = 127 В, что составляет 57,7% Uном,
= 220/1,73 = 127 В, что составляет 57,7% Uном,









