Асинхронный (индукционный) двигатель – механизм, превращающий силу переменного тока в механическую. Под асинхронным подразумевают, что скорость движения магнитной силы статора выше аналогичной величины оборотов ротора.
Для того, чтобы получше представлять, что такое асинхронный двигатель и принцип действия трехфазного асинхронного двигателя, где он используется и как работает, необходимо разобраться в его составных частях и деталях, исследовать технические характеристики. Кроме того, не лишним будет понять, как происходит преобразование силы во время пуска и где используется асинхронный двигатель на практике.
В сегодняшней статье мы попробуем ответить на самые интересные вопросы, связанные с асинхронными двигателями, разобраться в том, что такое устройство однофазного асинхронного двигателя, рассмотрим принципы работы, а также плюсы и минусы данного типа устройств.
Первый подобный механизм электродвигателей появился еще в 1888 году и представил его американский инженер Никола Тесла. Однако, его опытный образец устройства и был не самым удачным, так как был двух фазным или много фазным и рабочие характеристики асинхронного двигателя не удовлетворяли потребителей. Поэтому широкого распространения не получил.
А вот благодаря российскому ученому Михаилу Доливо-Доброволь скому в изобретение удалось вдохнуть новую жизнь. Именно ему принадлежит первенство в деле создания первого в мире трехфазного асинхронного мотора. Такое усовершенствование конструкции стало революционным, так как принцип работы трехфазного асинхронного двигателя позволял использовать для работы всего три провода, а не четыре. Так что для плавного пуска устройства в массовое производство препятствий больше не оставалось.
Сегодня, благодаря своей простоте эти машины получили широкое распространение, а механическая характеристика асинхронного двигателя устраивает всех водителей.
Каждый год доля асинхронных двигателей, среди всех двигателей мира, составляет 90%.
Простота в использовании, принцип действия асинхронного двигателя, легкий пуск, надежность и дешевизна, помогли этим моторам распространиться по всему миру и буквально совершить технический переворот в промышленности.
Принцип работы трехфазного двигателя основан на питании от трех фаз переменного тока в стандартной сети. Для работы ему требуется именно такое электричество и поэтому он назван трех фазным.

Любой мотор асинхронного типа, независимо от его мощности и размеров, состоит из одних и тех же частей, механическая характеристика асинхронного двигателя также одна и та же. Главными среди составляющих являются:
Помимо этого, в современных трех фазных двигателях можно найти следующие детали:
Как уже указывалось выше, базовые элементы двигателя — это статор (неподвижная часть) и ротор (подвижная деталь).
Статор выполнен в виде цилиндра, составлен данный элемент из множества металлических, форменных листов. Внутренняя часть создана таким образом, чтобы расположить обмотку. Центры обмоток расположены под углом в 120 градусов, а подключение происходит, исходя из доступного напряжения и двух возможных вариантов: на три или пять контактов.
Ротором называют подвижную часть подобного мотора, которая необходима для плавного пуска. Устройство асинхронного двигателя с фазным ротором является полноценным, ведь именно во вращении ротора состоит основной принцип работы трехфазного мотора.
Принципы, использование которых лежит в работе такого приспособления, как устройство асинхронного двигателя:
Исходя из типа обмотки, ротор может быть короткозамкнутым или фазным.
Короткозамкнутым называют ротор, состоящий из множества стальных частей. Работа асинхронного двигателя с короткозамкнутым ротором заключается в следующем: в специальные пазы заливают алюминий, формирующий сердцевины, крепящиеся с обеих сторон стопорными кольцами, такая конструкция получила название «беличья клетка». Называется так, потому что замкнута накоротко и в ней не может использоваться сопротивление.
Фазным называют ротор, который обмотан по принципу, аналогичному статору, подходящему для трехфазной сети. Края проводки сердцевины замыкают в звезду, а оставшиеся контакты подводят к контактным частям.
Согласно принципу обратимости, любым фазным асинхронным двигателям свойственна возможность работать в качестве двигателя, генератора или электромагнитного тормоза. Электромеханическая характеристика асинхронного двигателя:
Изменение порядка чередования фаз приводит к тому, что магнитное поле и сердцевина вращаются в различные стороны, при этом потребляется как механическая энергия, так и напряжение сети, создавая тормозной момент. Собранная энергия приводит к нагреву машины.
-min.jpg)
Принцип работы асинхронного двигателя в следующем: подавая напряжение на статор, в его проводке возникает магнитное воздействие, которая благодаря углу размещения осей обмоток, суммируется и создает итоговый, вращающий магнитный поток.
Вращаясь, он создает в проводниках электродвижущую силу. Обмотка сердцевины, создана таким образом, что при включении в сеть, появляется сила, налаживающаяся на действие статора и создающая движение.
Устройство и принцип действия асинхронного двигателя зависит и от сердцевины. Движение сердцевины происходит, когда магнитная сила статора и пусковой момент преодолевают тормозную мощность ротора и внутренняя часть начинает движение, в этот момент проявляется такой показатель, как скольжение.
Скольжение очень важный параметр. В начале движения ротора оно равно 1, но вместе с ростом частоты движения, наблюдается выравнивание, и как следствие снижаются электродвижущие силы и ток в обмотках, это приводит к снижению вращающего момента.
Существует крайний предел скольжения, превышать это значение не стоит, ведь механизм может «опрокинуться», что приведет к нарушению его нормальной работы. Минимальное скольжение происходит на холостых оборотах мотора, при увеличении момента значение будет расти, до наступления критической отметки.
Для создания асинхронной работы нужно сделать так, чтобы напряжение статора и общий магнитный поток соответствовали значению переменного тока.
Во время пуска вектор результирующего магнитного поля неподвижной части плавно вращается с определенной частотой. Через сечение ротора проходит магнитный поток. Электроэнергия, подходящая к двигателю в момент пуска, уходит на перемагничивание статора и ротора.
Стоит заметить, что для электромоторов, в том числе асинхронных свойственно то, что во время пуска в короткий промежуток времени достигается до 150% крутящего момента. Пусковой ток превышает номинальный в 7 раз и из-за этого, в момент пуска падает напряжение во всей электрической сети. Если падение напряжения слишком большое, то даже сам двигатель может не запуститься – таков принцип его действия. Поэтому на практике используют устройство плавного пуска.

Устройства плавного пуска асинхронных двигателей имеет свою специфику. Оно используется для плавного пуска или остановки электромагнитных двигателей. Может быть механическим, электромеханичес ким или полностью электронным.
Пусковая характеристика асинхронного двигателя предназначена:
Принцип работы и действия устройства плавного пуска основаны на широкой вариативности переменных. Как следствие, появляются большие возможности для управления режимами работы.
Асинхронный двигатель принцип работы и устройство имеет достоинства и недостатки. Трансформаторы, внутри которых находится вращающийся ротор, используемый для работы двигателя, получили обширное применение так как принцип действия у них простой и понятный, а само устройство работает бесперебойно. Однако и короткозамкнутым и фазным устройствам свойственны определенные недостатки. Причем именно принцип их действия лежит в основе данных минусов.
Плюсы:
Минусы:
Стоит отметить, что в настоящее время, отдается предпочтение устройствам с короткозамкнутым ротором. А вот устройства, в которых ротор фазный используются в редких случаях, как правило, когда достигается большая мощность.
cars-bazar.ru
Сердечник ротора также набирают из стальных пластин толщиной 0,5 мм, изолированных лаком или тонкой бумагой для уменьшения потерь на вихревые токи. Пластины штампуют с впадинами и собирают в пакеты, которые крепят на валу машины, образуя цилиндр с продольными пазами. В пазах укладывают проводники обмотки ротора. В зависимости от типа обмотки асинхронные машины могут быть с фазным и короткозамкнутым роторами. Фазная обмотка ротора выполнена подобно статорной, т. е. проводники соответствующим образом соединены между собой, образуя трехфазную систему. Обмотки трех фаз соединены звездой. Начала этих обмоток подключены к трем контактным медным
кольцам, укрепленным на валу ротора. Кольца изолированы друг от друга и от вала и вращаются вместе с ротором. При вращении колец поверхности их скользят по угольным или медным щеткам, неподвижно укрепленным над кольцами. Обмотка ротора может быть замкнута на какое-либо сопротивление или накоротко при помощи указанных выше щеток. Короткозамкнутая обмотка ротора выполняется по типу беличьего колеса (рис. 113). В пазах ротора укладывают массивные стержни, соединенные на торцовых сторонах медными кольцами. Часто короткозамкнутую обмотку ротора изготовляют из алюминия. Алюминий в горячем состоянии заливают в пазы ротора под давлением. Такая обмотка всегда замкнута накоротко и включение сопротивлений в нее невозможно. Двигатели с короткозамкнутым ротором проще и надежнее в эксплуатации, значительно дешевле, чем двигатели с фазным ротором. Однако двигатели с фазным ротором, как мы увидим ниже, обладают лучшими пусковыми и регулировочными свойствами.
В настоящее время асинхронные двигатели выполняют преимущественно с короткозамкнутым ротором и лишь при больших мощностях и в специальных случаях используют фазную обмотку

ротора.
В СССР производят асинхронные двигатели мощностью от нескольким десятков ватт до 15 000 кет при напряжениях обмотки статора до 6 кв.
Между статором и ротором имеется воздушный зазор, величина которого оказывает существенное влияние на рабочие свойства двигателя.
Наряду с важными положительны-; ми качествами — простотой конструкции и обслуживания, малой стоимостью — асинхронный двигатель имеет и некоторые недостатки, из которых наиболее существенным является относительно низкий коэффициент мощности (соs ). У асинхронного двигателя соs при полной нагрузке может достигать значений 0,85—0,9; при недогрузках двигателя его соs резко уменьшается и при холостом ходе составляет 0,2—0,3.
Низкий коэффициент мощности асинхронного двигателя объясняется большим потреблением реактивной мощности, которая необходима для возбуждения магнитного поля. Магнитный поток в асинхронном двигателе встречает на своем пути воздушный зазор между статором и ротором, который в большой степени увеличивает магнитное сопротивление, а следовательно, и потребляемую двигателем реактивную мощность.
В целях повышения коэффициента мощности асинхронных двигателей воздушный зазор стремятся делать возможно меньшим, доводя его у малых двигателей (порядка 2—5 квт) до 0,3 мм. В двигателях большой мощности воздушный зазор приходится увеличивать по конструктивным соображениям, но все же он не превышает 2—2,5 мм.

§ 92. РАБОТА АСИНХРОННОГО ДВИГАТЕЛЯ ПОД НАГРУЗКОЙ
В рабочем режиме ротор двигателя вращается с числом оборотов в минуту n2, меньшим числа оборотов n1 магнитного поля статора, вращающегося в том же направлении, что и ротор. Поэтому магнитное поле, имеющее большую скорость, скользит относительно ротора с числом оборотов, равным разности чисел оборотов поля и ротора, т. е.

Относительное отставание ротора от вращающегося магнитного поля статора характеризуется скольжением S.
Скольжение представляет собой отношение числа оборотов магнитного поля статора относительно вращающегося ротора к числу оборотов поля статора в пространстве, т. е.

Эта формула определяет скольжение в относительных единицах. Скольжение может быть также выражено в процентах:

Если ротор неподвижен (n2=0), то скольжение равно единице или 100%.
Если ротор вращается синхронно с магнитным полем, т. е. с одинаковой скоростью (n2=n1), то скольжение равно нулю.
Таким образом, чем больше скорость вращения ротора, тем меньше скольжение.
В рабочем режиме асинхронного двигателя скольжение мало. У современных асинхронных двигателей скольжение при полной нагрузке составляет 3—5%, т. е. ротор вращается с числом оборотов, незначительно отличающимся от числа оборотов магнитного поля статора.
При холостом ходе, т. е. при отсутствии нагрузки на валу, скольжение ничтожно мало и может быть принято равным нулю.
Скорость вращения ротора можно определить из следующих соотношений:

Двигатель будет работать устойчиво с постоянной скоростью вращения ротора при равновесии моментов, т. е. если вращающий момент двигателя Мвр будет равен тормозному моменту на валу двигателя Мтор, который развивает приемник механической энергии, например, резец токарного станка. Следовательно, можно записать:

Любой нагрузке машины соответствует определенное число оборотов ротора т2 и определенное скольжение S.
Магнитное поле статора вращается относительно ротора с числом оборотов n8 и индуктирует в его обмотке э. д. с. Е2, под действием которой по замкнутой обмотке ротора протекает ток силой I2.
Если нагрузка на валу машины увеличилась, т. е. возрос тормозной момент, то равновесие моментов будет нарушено, так как тормозной момент окажется больше вращающего. Это приведет к уменьшению скорости вращения ротора, а следовательно, к увеличению скольжения. С увеличением скольжения магнитное поле статора будет пересекать проводники обмотки ротора чаще, э. д. с. E2, индуктированная в обмотке ротора возрастет, а в силу этого увеличится как сила тока в роторе, так и развиваемый двигателем вращающий момент. Увеличение скольжения и силы тока в ротор; будет происходить до значений, при которых вновь наступит равновесие моментов, т. е. вращающий момент станет равным тормозному.
Так же протекает процесс изменения числа оборотов ротора и развиваемого момента при уменьшении нагрузки двигателя, С уменьшением нагрузки на валу двигателя тормозной момент становится меньше вращающего, что приводит к увеличению скорости вращения ротора или к уменьшению скольжения. В результате уменьшаются э. д. с. и сила тока в обмотке ротора, а следовательно, и вращающий момент, который вновь становится равным тормозному моменту.
Магнитное поле статора пересекает проводники обмотки статора и индуктирует в ней э. д. с. Е1 которая уравновешивает приложенное напряжение сети U1.
Если пренебречь падением напряжения в сопротивлении обмотки статора, которое мало по сравнению с э. д.с, то между абсолютными значениями приложенного напряжения и э. д. с. обмотки статора можно допустить приближенное равенство, т. е.

Таким образом, при неизменном напряжении сети будет неизменна и э. д.с. обмотки статора. Следовательно, магнитный поток в воздушном зазоре машины, так же как в трансформаторе, при любом изменении нагрузки остается постоянным.
Ток обмотки ротора создает свое магнитное поле, которое направлено навстречу магнитному полю, образуемому током обмотки статора. Чтобы результирующий магнитный поток в машине оставался неизмененным при любом изменении нагрузки двигателя, размагничивающее магнитное поле обмотки ротора должно быть уравновешено магнитным полем обмотки статора. Поэтому при увеличении силы тока в обмотке ротора увеличивается и сила тока в обмотке статора.
Таким образом, работа асинхронного двигателя принципиально подобна работе трансформатора, у которого при увеличении тока во вторичной обмотке увеличивается ток в первичной обмотке.
fiziku5.ru
 Простым по собственному устройству и самым всераспространенным является асинхронный движок придуманный М. О. Доливо-Добровольским. Механизм работы которого основан на содействии крутящего магнитного поля на приспособленную для вращения короткозамкнутую обмотку.Для усиления магнитного поля и придания ему подабающей конфигурации, обмотки асинхронного двигателя размещены на 2-ух сердечниках, которые собираются из листов электротехнической стали шириной 0.5 мм. Листы друг от друга изолированы слоем лака, для уменьшение утрат на вихревые токи.
Простым по собственному устройству и самым всераспространенным является асинхронный движок придуманный М. О. Доливо-Добровольским. Механизм работы которого основан на содействии крутящего магнитного поля на приспособленную для вращения короткозамкнутую обмотку.Для усиления магнитного поля и придания ему подабающей конфигурации, обмотки асинхронного двигателя размещены на 2-ух сердечниках, которые собираются из листов электротехнической стали шириной 0.5 мм. Листы друг от друга изолированы слоем лака, для уменьшение утрат на вихревые токи.
У недвижной части машины – статора, сердечник имеет форму полного цилиндра. В пазах с внутренней стороны этого сердечника уложена трехфазная обмотка. Эта обмотка врубается под напряжение трехфазной сети и возникающие в ней токи возбуждают крутящееся магнитное поле машины.

Механизм работы асинхронного электродвигателя основан на содействии вращающегося магнитного поля
У подвижной части – ротора сердечник имеет форму цилиндра. Он укреплен на валу машины. В пазах на поверхности сердечника располагается обмотка ротора. Почти всегда короткозамкнутая. Если ее на уровне мыслей снять с сердечника, то она будет иметь вид цилиндрической клеточки из медных либо дюралевых стержней, замкнутых на торцах, 2-мя кольцами из такого же материала. Такую обмотку именуют «беличьим колесом». Стержни обмотки вставляются в пазы ротора без изоляции. Нередко короткозамкнутая обмотка ротора изготовляется методом заливки расплавленным алюминием пазов сердечника. При этом отливаются и замыкающие кольца.
Обмотка статора электродвигателя производится изолированным проводом и укладывается в пазы статора. Любая из катушек распределяется по нескольким пазам. Если обмотка состоит из 3-х катушек, то трехфазная система токов, ее обтекающих, возбуждает вышеперечисленное двухполюсное вращение. За один период переменного тока такое поле делает один оборот. Как следует при стандартной промышленной частоте 50 гц т. е. 50 периодов за секунду. Двухполюсное поле делает 50 х 60 =3000 об/мин. Скорость вращения ротора обычно лишь на несколько процентов меньше скорости вращения поля.

роторо асинхронного мотора беличья клеточка (колесо)
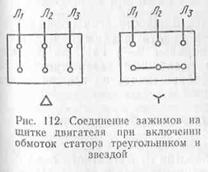
Чтоб получить движок с наименьшей скоростью поля, необходимо средством многополюсной обмотки прирастить число полюсов крутящего магнитного поля. Каждым трем катушкам статорной обмотки, соответствует одна пара полюсов крутящего поля. Как следует, если трехфазная обмотка статора состоит из К катушек. то число пар полюсов крутящего поля, возбуждаемого этой обмоткой будет: Р=К:З Направление вращения ротора асинхронного мотора определяется направлением вращения его магнитного поля. А направление вращения поля обуславливается последовательностью фаз А В С трехфазной сети. Для изменения направления вращения мотора довольно поменять соединение обмотки статора с сетью, чтоб зажим статора, соединенный сначало с фазой А сети, был бы присоединен к фазе В сети: соответственно зажим статора, соединенный с фазой В сети, должен быть соединен с фазой А сети. Соединение третьего зажима статора с сетью остается без конфигураций.
Пока ротор неподвижен. Условия в асинхронном движке подобны условиям в трансформаторе: первичной обмотке трансформатора соответствует обмотка статора. А вторичной обмотка ротора. Напряжение на зажимах каждой фазной обмотки статора уравновешивается приемущественно э. д. с. индуктируемой в этой обмотке вращающимся магнитным полем. Ток в обмотке ротора индуктируется вращающимся магнитным полем. Согласно принципу Ленца этот индуктированный ток, стремится ослабить магнитное поле, его индуктирующее. Но ослабление магнитного поля уменьшает э. д. с. индуктируемую этим полем в обмотке статора: как следует, нарушается электронное равновесие на зажимах статора. Так появляется неустойчивый излишек напряжения. Это вызывает повышение силы тока в обмотке статора. Ток статора увеличивает магнитное поле приблизительно до его прежней величины и электронное равновесие на зажимах статора восстанавливается.

Асинхронный движок в разобраном виде
Соотношение токов статора и ротора в асинхронном движке подобны соотношениям первичного и вторичного токов в трансформаторе. Ток статора является не намагничивающим. А ток ротора – размагничивающим. Всякое изменение тока ротора вызывает пропорциональное изменение тока статора.
При пуске мотора в ход, крутящееся магнитное поле пересекает обмотку ротора с большой скоростью (угловой скоростью W:P) и индуктирует в ней значительную э. д. с. Эта э. д. с. делает в короткозамкнутом роторе большой пусковой ток. Соответственно и в обмотке статора появляется тоже значимый пусковой ток. Он больше рабочего тока мотора приблизительно раз в семь. Пусковой толчок тока характерен для асинхронного мотора с короткозамкнутым ротором.
По мере того как скорость ротора растет. миниатюризируется индуктируемая в нем э. д. с. а совместно с ней уменьшаются токи ротора и статора. В конце запуска ненагруженного мотора, сила тока ротора должна быть таковой, чтоб крутящий момент, развиваемый движком, покрывал все его механические утраты – от трений в подшипниках, о воздух и т. д.
Если нагрузить уже крутящийся асинхронный движок, то механический тормозящий момент на валу мотора поначалу окажется подольше крутящего момента и ротор уменьшит скорость n2 / Соответственно вырастет разность скоростей n1 – n2 поля и ротора, т. е. возрастет скольжение.

Асинхронный движок с короткозамкнутым ротором
Крутящееся поле будет пересекать ротор с относительно большой скоростью и индуктировать в роторе огромную э. д. с. Возрастание э. д. с. Вызовет повышение силы тока в роторе. Пропорционально силе тока вырастет крутящий момент и уравновесит тормозящий момент нагрузки на валу мотора.
Сразу, повышение силы тока ротора вызовет соответственное увеличение силы тока статора, в итоге чего вырастет и потребление мощности движком из сети, Таким макаром, с повышением нагрузки на валу мотора растет скольжение, силы тока статора и потребление мощности движком из сети.
elektrica.info
Наиболее распространенным в промышленности типом двигателя синусоидального тока является трехфазный асинхронный двигатель. В отличие от других электродвигателей он наиболее прост и надежен в работе. Асинхронный двигатель содержит неподвижную часть – статор, в пазах которого помещены три катушки, создающие круговое вращающееся магнитное поле, и подвижную часть – ротор, в пазах которого находятся замкнутые на себя или на внешнее сопротивление катушки (см. рис. 4.19).
статор
ротор

























Рис. 4.19
Вращающиеся катушки даны в разрезе, торцевые части катушек не показаны. Вал ротора соединен с валом рабочей машины. Допустим, что вначале ротор неподвижен. При этом вращающееся магнитное поле, созданное обмотками статора, пересекает провода катушек неподвижного ротора со скоростью w и наводит в них эдс. ЭДС вызывает токи в обмотках ротора. По закону Ленца эти токи стремятся своими магнитными полями ослабить вызываемое их магнитное поле .
Взаимодействие токов ротора с вращающимся магнитным полем приведет к тому, что ротор начнет вращаться в ту же сторону, в какую вращается магнитное поле. В этом можно убедиться, применив правило «левой руки» (см. рис. 3.19).
В установившемся режиме угловая скорость вращения ротора составляет wрот = (0,98 0,95) w.
Двигатель называется асинхронным, потому что ротор вращается не синхронно с вращающимся полем. Это станет понятно, если учесть, что при wрот = w вращающееся поле не пересекало бы провода катушек ротора, в них отсутствовал бы ток, и ротор не испытывал бы вращающего момента (то есть при одинаковых угловых скоростях прекратилось бы наведение токов в обмотках ротора, следовательно, не было бы сил, создающих вращающийся момент).

w















xxx


ротор





. . .






обмотки
статора
Рис. 4.20
Для получения простейшего трехполюсного вращающегося поля необходимо три одинаковые фазные обмотки расположить на статоре так, чтобы углы между их осями были равны 120. Если фазные обмотки соединить по схеме звезда или треугольник и подключить к трехфазному источнику электрической энергии, то в витках катушек появятся токи:
iA = Im sin wt ;
iB = Im sin(wt –120) ;
iA = Im sin(wt – 240) .
Токи фазных обмоток создают магнитные поля. Результирующее магнитное поле вращается в плоскости осей катушек по часовой стрелки с угловой скоростью w. Оно совпадает по направлению с осью той из фаз обмоток, ток в которой достигает максимального значения.
Рассмотрим 3 момента времени: 1, 2, 3 (см. рис. 4.21).
i
iA iB iC
1 2 3
wt









Рис. 4.21
Направления токов в обмотках статора в соответствии с укладкой будут выглядеть так, как представлено на рис. 4.22:








Рис. 4.22
Полярность в обмотках показана на рис. 4.2:

Для моментов времени соответственно
полярность представлена на рис. 4.23 а), б), в).



–
– –
+ +
+
(а)
+
+ –
+ –
–
(б)
+
– +
– +
–
(в)


Рис. 4.23
Чтобы изменить направление вращения магнитного поля достаточно изменить порядок подключения двух любых фазных обмоток асинхронной машины к трехфазному источнику электрической энергии.
РЕЖИМ РАБОТЫ ТРЕХФАЗНОЙ АСИНХРОННОЙ МАШИНЫ.
Режим работы трехфазной асинхронной машины определяется режимом электромагнитного взаимодействия токов в обмотке статора с токами ротора. Взаимодействие вращающегося магнитного поля, создаваемого токами в обмотках статора с токами ротора вынуждает ротор вращаться по направлению вращения поля. Но чем быстрее вращается ротор, тем меньше индуктируемая в его обмотке эдс, а значит и токи. Если частота вращения поля – f1, а частота вращения ротора – f, то режим работы асинхронного двигателя можно характеризовать скольжением.

f
режим
двигателя режим
режим эл.–магн.
генерато- тормоза
ра
1 S




Рис. 4.24
В зависимости от значения скольжения трехфазная асинхронная машина может работать в режиме двигателя, генератора и электромагнитного тормоза.
В режиме двигателя (0<S<1) трехфазная асинхронная машина является преобразователем электрической энергии в механическую. Ротор должен вращаться медленнее поля с такой частотой вращения, при которой токи в обмотке ротора, взаимодействуя с вращающимся магнитным полем, создаваемом токами в обмотках статора, создают вращающий момент, уравновешивающий тормозной момент от сил трения и нагрузки на валу.
В режиме генератора (S<0) трехфазная асинхронная машина является преобразователем механической энергии в электрическую. Ротор генератора вращается в направлении вращения магнитного поля, создаваемого токами в обмотках статора, с частотой вращения большей, чем частота вращения поля.
В режиме электромагнитного тормоза (S>1) трехфазная асинхронная машина вращается в направлении, противоположном направлению вращения магнитного поля, создаваемого токами в обмотках статора. В режиме электромагнитного тормоза в трехфазной асинхронной машине рассеивается значительная энергия на гистерезис и вихревые токи.
Для устойчивой работы двигателя важно, чтобы автоматически устанавливалось равновесие вращающего и тормозного моментов; с увеличением нагрузки на валу двигателя должен соответственно возрасти и вращающий момент. Это уравновешивание у работающего асинхронного двигателя осуществляется следующим образом: при увеличении нагрузки на валу тормозной момент оказывается больше вращающего момента, следовательно, частота ротора уменьшается, скольжение растет, что в свою очередь, влечет за собой увеличение вращающего момента, и равновесие моментов восстанавливается при возросшем скольжении S.
Зависимость вращающего момента от S сложна. Не вдаваясь в подробности, изобразим график этой зависимости (см. рис. 4.25):
M неустойчивый
режим
(1)
Mпом Mmax
(2) Mпуск
S
Sкр 1











Рис.4.25
На рис. 4.25 участок (1) является режимом перегрузки, а участок (2) - рабочим режимом.
Максимальный момент определяет перегрузочную способность асинхронного двигателя.
У работающего двигателя динамическое равновесие моментов автоматически восстанавливается при увеличении скольжения, пока тормозной момент на валу меньше максимального вращающего момента двигателя. У нормальных асинхронных двигателей максимальный момент больше номинального в 2 – 2,5 раз. При перегрузке свыше максимального момента двигатель входит в область неустойчивого режима (если тормозной момент на валу постоянен) и останавливается. Это обстоятельство вынуждает выбирать мощность двигателя так, чтобы даже при кратковременной перегрузке не был превышен максимальный момент, в противном случае привод должен быть снабжен соответствующим маховиком.
Зависимость M(S) часто представляется в виде f(M). Эта зависимость называется механической характеристикой. По своей форме она отличается от M(S) только положением по отношению к координатным осям.
f
Mmax
Mпуск
M





Рис. 4.26
studfiles.net