23. Конструкции асинхронных исполнительных двигателей
Асинхронные исполнительные двигатели выпускаются следующих видов:
1) с полым немагнитным ротором; 2) с полым ферромагнитным ротором; 3) с короткозамкнутым ротором типа "беличья клетка".
Асинхронные исполнительные двигатели с полым немагнитным ротором. Сегодня это, пожалуй, самые распространенные асинхронные исполнительные двигатели. Они применяются в различных системах автоматического управления и выпускаются целым рядом заводов. Их мощности - от десятых долей ватта до сотен ватт. Они рассчитываются на промышленную частоту (50 Гц) и на повышенные частоты (200, 400, 500 Гц). Угловые скорости вращения колеблются от 1500 до 30000 об/мин.
Одна из конструктивных схем двигателя с полым немагнитным ротором представлена на рис. 1.17. Двигатель состоит из внешнего статора 1 с обмотками возбуждения и управления; внутреннего статора-сердечника 2 без обмоток, служащего лишь для уменьшения магнитного сопротивления на пути главного потока; полого немагнитного ротора 3, выполненного из материала с высоким удельным сопротивлением (чаще всего из сплавов алюминия). Толщина стенок ротора составляет 0,1-1 мм. Весьма небольшая масса ротора делает его малоинерционным, что придает двигателю очень ценные свойства. Между стенками ротора и обоими статорами выполняются воздушные зазоры, величина которых обычно не превосходит 0,15-0,25 мм. Однако, эти зазоры вместе c немагнитным ротором создают большие немагнитные промежутки между внешним и внутренним статорами, что приводит к большим намагничивающим токам, достигающим 90 % от номинального значения.

Рис. 1.17. Асинхронный исполнительный двигатель с полым немагнитным ротором
Двигатели мощностью 0,1-5 Вт изготавливают несколько иначе. Поскольку такие двигатели имеют малые внутренние диаметры, то для облегчения укладки обмоток их размещают в пазах внутреннего статора, а внешний делают без обмоток. Правда, это приводит к некоторому увеличению диаметра ротора, а следовательно и его момента инерции. Для устранения последнего недостатка иногда используют третью конструкцию: одну из обмоток размещают на внутреннем, а другую - на внешнем статоре.
Д о с т о и н с т в а двигателей с полым немагнитным ротором.
1) Малый момент инерции, что в совокупности со значительным пусковым моментом обеспечивает высокое быстродействие. Электромеханические постоянные времени большинства их них лежат в пределах: 0,01-0,1 с. при f = 50 Гц и 0,02-0,15 с. при f = 400 Гц.
2) Сравнительно хорошая линейность механических и регулировочных характеристик, чему в известной мере способствуют весьма незначительные индуктивные сопротивления немагнитного ротора [xр = (0,05-0,1)rр].
3) Высокая чувствительность - малое напряжение трогания, что объясняется малым моментом инерции и отсутствием односторонних сил магнитного притяжения, поскольку ротор выполнен из немагнитного материала.
Н е д о с т а т к и двигателей с полым немагнитным ротором.
1) Низкие энергетические показатели, что объясняется большими намагничивающими токами, приводящими к значительным потерям в обмотках.
2) Большие габариты и масса, обусловленные первым недостатком.
Асинхронные исполнительные двигатели с полым немагнитным ротором выпускаются сериями АДП, ДИД, ЭМ. Как правило, первая серия предназначена для устройств наземной автоматики, вторая - для авиационной и космической техники, а третья - для средств вычислительной техники.
Асинхронные исполнительные двигатели с полым ферромагнитным ротором. В отличии от двигателей первого типа ротор этого двигателя выполняется из магнитного материала с толщиной стенок 0,3-3 мм, поэтому здесь отсутствует внутренний статор. Воздушный зазор небольшой (0,2-0,3 мм). Однако намагничивающий ток (Im) этого двигателя практически мало отличается от Im двигателя с полым немагнитным ротором, т.к.проводимость ротора и здесь невысокая вследствие его малой толщины.
Двигатель имеет большой момент инерции и небольшой пусковой момент, что значительно ухудшает его быстродействие. Приемы, связанные сомеднением ротора с целью увеличения пускового момента, оказались малоэффективными.Существенным недостатком являются большие силы одностороннего магнитного притяжения, приводящие порой к залипанию ротора и отказам вработе. Вцелом эти двигатели значительно уступают двигателям с полымнемагнитным ротором, поэтому они не получили широкого распространения.
Асинхронные двигатели с короткозамкнутым ротором выпускаются обычного исполнения и специальной, так называемой "сквозной" конструкции.
Первые отличаются от силовых машин только повышенным активным сопротивлением ротора и используются в тех установках, где требования высокого быстродействия не играют существенной роли. Вторые имеют оригинальную конструкцию, суть которой состоит в том, что диаметр расточки статора Di равен наружному диаметру подшипника Dп (рис. 1.18) Такая конструкция позволяет проводить окончательную обработку (шлифовку) внутренней поверхности статора и отверстий под подшипники в подшипниковых щитах за одну установку двигателя на станке. Конечно, перед этим подшипниковые щиты должны быть закреплены на статоре. Обычно лобовые части покрывают специальным компаундом для предохранения их от металлической стружки.

Рис. 1.18. Асинхронный исполнительный двигатель "сквозной" конструкции
"Сквозная" конструкция позволяет получать воздушные зазоры в 0,03-0,05 мм, что на порядок меньше, чем в двигателях традиционной конструкции. Кроме того, для уменьшения момента инерции их выполняют с малым диаметром и увеличенной длиной ротора. Обычно Lр/Dр = 2-3.
Малые воздушные зазоры резко уменьшают намагничивающий ток, увеличивают КПД, cosj, вращающий момент двигателя. Однако сравнительно большой момент инерции (по отношению к двигателям с полым немагнитным ротором) приводит к увеличению электромеханической постоянной времени.
ПРИНЦИП ДЕЙСТВИЯ АИД
Основан на явление электромаг индукции.
1. Ротор неподвижен, тормозной момента на его валу отсутствует, при подключении трехфазной обмотки статора в сеть переменного тока, создается вращающиеся магнитное поле статора с угловой скоростью
n1= f12π/p (1)
f1 – частота сети, р – число пар полюсов
2. Вращающееся маг поле пересекает проводники обмотки ротора и наводит в них ЭДС с частотой п1.
3. Так как проводники замкнуты, то в них появляется ток I2, активная составляющая которого по направлению совпадает с ЭДС
4. Ток I2 взаимодействует с вращающимся магнитным полем статора и создает вращающийся момент под действием которого ротор придет во вращение. Направление моментов и вращения ротора будет совпадать с направлением вращения поля.
5. По мере разгона ротора его угловая скорость n будет возрастать, но даже на холостом ходу она некогда не достигнет поля статора. (n1≠n) Ток в роторе, а следовательно, и момент могут возникнуть только тогда, когда магнитное поле пересекает проводники ротора. Ток I2 и момент двигателя М увеличиться с ростом ЭДС в роторе, которое пропорционально разности n1-n.
Таким образом для АИД характерно асинхронное вращение его ротора с магнитным поля статора. Разницу между скоростями вращения n1-n оценивают величиной называемой скольжением.
S = (n1 – n)/n1
КОЭФФИЦИЕНТ ПОЛЕЗНОГО ДЕЙСТВИЯ АСИНХРОННОГО ИСПОЛНИТЕЛЬНОГО ДВИГАТЕЛЯ
Асинхронный двигатель потребляет из сети активную мощность:
 , которая частично расходуется на покрытие потерь в обмотках статора РМ1 и в стали сердечника статора Pc1 на гистерезис и вихревые токи:
, которая частично расходуется на покрытие потерь в обмотках статора РМ1 и в стали сердечника статора Pc1 на гистерезис и вихревые токи: 
Оставшаяся часть мощности  представляет собой электромагнитную мощность, передаваемую посредством магнитного поля через воздушный зазор ротору. Энергия, полученная ротором, преобразуется в механическую и частично расходуется на покрытие потерь в роторе.
представляет собой электромагнитную мощность, передаваемую посредством магнитного поля через воздушный зазор ротору. Энергия, полученная ротором, преобразуется в механическую и частично расходуется на покрытие потерь в роторе.
Часть этой мощности теряется в виде электрических потерь Рэл2 в активном сопротивлении вторичной обмотки r'2:  Так как сердечник ротора при работе двигателя перемагничивается с малой частотой
Так как сердечник ротора при работе двигателя перемагничивается с малой частотой  . То потери в стали ротора будут малы. Остальная часть мощности Рэм превращается в механическую мощность Pмх, развиваемую на роторе:
. То потери в стали ротора будут малы. Остальная часть мощности Рэм превращается в механическую мощность Pмх, развиваемую на роторе:  .
.
Часть механической мощности Рмх теряется внутри самой машины в виде механических потерь рмх (на вентиляцию, на трение в подшипниках и на щетках машин с фазным ротором, если эти щетки при работе не поднимаются), магнитных потерь в сердечнике ротора рмг2 и добавочных потерь рд. Последние вызваны в основном высшими гармониками магнитных полей, которые возникают ввиду наличия высших гармоник намагничивающих сил обмоток и зубчатого строения статора и ротора. Во-первых, высшие гармоники поля индуктируют ЭДС и токи в обмотках, в связи с чем появляются добавочные электрические потери.
Эти потери заметны по величине только в обмотках типа беличьей клетки. Во-вторых, эти гармоники поля обусловливают добавочные магнитные потери на поверхности (поверхностные потери) и в теле зубцов (пульсационные потери) статора и ротора Вращение зубцов ротора относительно зубцов статора вызывает пульсации магнитного потока в зубцах, и поэтому соответствующая часть потерь называется пульсационными потерями. Магнитные потери в сердечнике ротора при нормальных рабочих режимах обычно очень малы и отдельно не учитываются.
Полезная механическая мощность на валу, или вторичная мощность.
 .
.
В соответствии с изложенным на рис.1.4 изображена энергетическая диаграмма асинхронного двигателя.
Сумма потерь двигателя:  .
.
Полезная мощность на валу двигателя:  .
.
Энергетическая диаграмма асинхронного двигателя представлена на рис.1.4.
КПД двигателя:  .
.
КПД двигателей мощностью Рн=1—1000 кВт при номинальной нагрузке находится соответственно в пределах η=0,72—0,95. Более высокие КПД имеют двигатели большей мощности и с большей скоростью вращения.
studfiles.net
Роль и значение асинхронных машин
Асинхронные машины используются в основном как двигатели. В настоящее время асинхронные двигатели являются наиболее распространенными электрическими машинами. Они потребляют около 50% электрической энергии, вырабатываемой электрическими станциями страны. Такое широкое распространение двигатели получили благодаря конструктивной простоте, низкой стоимости и высокой эксплуатационной надежности при минимальном обслуживании. Двигатели выпускаются на мощности от долей ватта до десятков тысяч киловатт. Они имеют относительно высокий КПД:при мощностях более 1 кВт он составляет 0,7—0,95.
Наряду с достоинствами асинхронные двигатели имеют и недостатки. К их числу следует отнести потребление из сети реактивного тока, обходимого для создания магнитного потока, в результате чего асинхронные двигатели работают с cosφ<1 (при мощности от 1 кВт и выше cosφ = 0,7-0,9).
Асинхронные двигатели изготовляются для работы от однофазных, двухфазных и трехфазных сетей переменного тока. Но главным образом они выпускаются для работы от трехфазных сетей.
Появление трехфазных асинхронных двигателей связано с именем М. О. Доливо-Добровольского. Эти двигатели были изобретены им в 1889 г. Предложенная М. О. Доливо-Добровольского конструкция асинхронных двигателей в основных чертах сохранилась до наших дней.
Конструкция асинхронных двигателей
Асинхронные двигатели состоят из двух частей: неподвижной части — статора и вращающейся части — ротора.
Сердечник статора, представляющий собой полый цилиндр, набирают из отдельных листов, которые штампуют из холоднокатаной изотропной электротехнической стали толщиной обычно 0,5 мм. Листы изолируются друг от друга электроизоляционным покрытием и собираются в пакеты, толщиной 30-50 мм. На внутренней поверхности статора выштамповываются пазы, в которые укладывают обмотку. Пазы отделены выступами – зубцами. Часть сердечника статора, занятая зубцами называется зубцовой зоной. Остальная часть – ярмо статора. Длина сердечника статора в осевом направлении называется активной длиной машины. Сердечник статора закрепляют в корпусе.
Роторы асинхронных двигателей выполняют двух видов: с короткозамкнутой обмоткой и с фазной обмоткой. Первый тип двигателей называют короткозамкнутыми асинхронными двигателями, а второй — асинхронными двигателями с фазным ротором или асинхронными двигателями с контактными кольцами. Наибольшее распространение имеют короткозамкнутые двигатели.
На рис. 1.1 показан общий вид и разрезы короткозамкнутого двигателя.
Сердечник ротора собирают из листов, которые штампуют из высечки листов статора одновременно со штамповкой последних.
В короткозамкнутых роторах применяют полузакрытые или закрытые пазы, имеющие овальную, прямоугольную или фигурную форму (рис. 1.2). Ширину открытия пазов выбирают около 1 мм. Закрытые пазы перекрывают сверху стальным мостиком толщиной 0,3 – 0,5 мм.

Рис. 1.1. Короткозамкнутый асинхронный двигатель:
1 – станина; 2 – сердечник статора; 3 – обмотка статора; 4 – сердечник ротора; 5 – обмотка ротора; 6 - паз статора; 7 – паз ротора

Рис. 1.2. Пазы ротора асинхронного двигателя
Обмотку ротора с короткозамкнутой обмоткой (рис. 1.3) выполняют путем заливки расплавленного алюминиевого сплава в пазы. Одновременно с обоих торцов ротора отливают алюминиевые кольца 2, замыкающие стержни пазов 1. Для усиления охлаждения двигателя вместе с кольцами отливают примыкающие к ним вентиляционные лопатки. Иногда, главным образом в крупных машинах, используется сварная обмотка – в пазы вставляют медные стержни, которые на торцах присоединяют к медным короткозамкнутым кольцам.

Рис. 1.3. Короткозамкнутый ротор с литой обмоткой
Отдельно обмотка короткозамкнутого ротора представляет собой конструкцию наподобие беличьей клетки. В электрическом отношении она является многофазной обмоткой с числом фаз, равным числу стержней (пазов).
В двигателях с фазным ротором (рис. 1.4) в пазы укладывают трехфазную обмотку аналогично обмотке статора. Обмотку соединяют в звезду, а три вывода от нее подсоединяют к контактным кольцам, расположенным на валу машины. Кольца изолированы друг от друга и от вала машины. К ним через неподвижные щетки подсоединяют пусковой или регулировочный реостат.
Вал ротора вращается в подшипниках, укрепленных в боковых щитах, называемых подшипниковыми щитами. Подшипниковые щиты прикрепляют к корпусу статора. В корпусе крепят сердечник статора.
В асинхронных двигателях воздушный зазор между статором и ротором выбирают минимально возможным из механических соображений (чтобы ротор при вращении не задевал о статор). В машинах небольшой и средней мощности он составляет доли миллиметра, а у более крупных машин — миллиметры. С уменьшением зазора снижается потребляемый из сети намагничивающий ток, что способствует повышению cosφ двигателя.
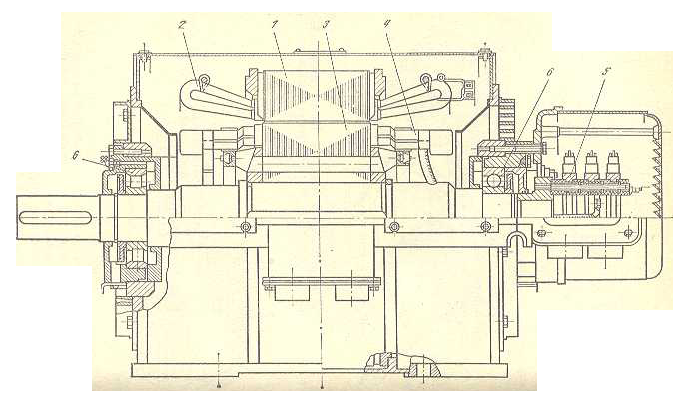
Рис. 1.4. Асинхронный двигатель с фазным ротором: 1 – пакет статора; 2 – обмотка статора; 3 – сердечник ротора; 4 – обмотка ротора; 5 – контактные кольца; 6 – подшипники
www.poznayka.org
Понятие асинхронной машины связано с тем, что ротор ее имеет частоту вращения, отличающуюся от частоты вращения магнитного поля статора. Буква «а» здесь играет как бы роль отрицания или нестрогого следования ротора за синхронно вращающимся магнитным полем статора.
Создателем этой простой по конструкции, но удобной и надежной в работе машины является русский инженер М.О. Доливо-Добровольский. Асинхронный электродвигатель, впервые разработанный в 1889 году, практически не подвергся серьезным изменениям до наших дней. В основу конструкции асинхронного электродвигателя положено создание системы трехфазного переменного тока принадлежащее этому же автору.
Переменный ток, подаваемый в трехфазную обмотку статора двигателя, формирует в нем вращающееся магнитное поле.
Неподвижная часть машины называется статор, подвижная – ротор. Сердечник статора набирается из листовой электротехнической стали и запрессовывается в станину. На рисунке 1 показан сердечник статора в сборе. Станина 1 выполняется литой, из немагнитного материала. Чаще всего станину выполняют из чугуна или алюминия. На внутренней поверхности листов 2, из которых выполняется сердечник статора, имеются пазы, в которые закладывается трёхфазная обмотка 3. Обмотка статора выполняется в основном из изолированного медного провода круглого или прямоугольного сечения, реже – из алюминия.
Обмотка статора состоит из трёх отдельных частей, называемых фазами. Начала фаз обозначаются буквами с1, с2, с3, концы – с4, с5, с6.

Рис. 1: 1 — станина; 2 — металлические листы; 3 — трехфазная обмотка
Начала и концы фаз выведены на клеммник (рис. 2, а), закреплённый на станине. Обмотка статора может быть соединена по схеме звезда (рис. 2, б) или треугольник (рис. 2, в). Выбор схемы соединения обмотки статора зависит от линейного напряжения сети и паспортных данных двигателя. В паспорте трёхфазного электродвигателя задаются линейные напряжения сети и схема соединения обмотки статора. Например, 660/380, Y/∆. Данный двигатель можно включать в сеть с Uл = 660В по схеме звезда или в сеть с Uл =380В – по схеме треугольник. Основное назначение обмотки статора – создание в машине вращающего магнитного поля.

Рис. 2
Сердечник ротора набирается из листов электротехнической стали, на внешней стороне которых имеются пазы, в которые закладывается обмотка ротора.
 Рис. 3: а — с короткозамкнутым ротором; б — с фазным ротором
Рис. 3: а — с короткозамкнутым ротором; б — с фазным ротором
Обмотка ротора бывает двух видов: короткозамкнутая и фазная. Соответственно этому асинхронные электродвигатели бывают:
www.mtomd.info