Частота вращения ротора асинхронного двигателя определяется из выражения:

 (6.16)
(6.16)
где  - частота вращения магнитного поля статора в минуту,
- частота вращения магнитного поля статора в минуту,
 - скольжение ротора,
- скольжение ротора,
 - частота мгновенных токов в обмотках статора в секунду,
- частота мгновенных токов в обмотках статора в секунду,
 - количество пар полюсов статора.
- количество пар полюсов статора.
Исходя из выражения (6.16), регулирование частоты вращения асинхронных двигателей с короткозамкнутым ротором возможно путём изменения частоты тока  , скольжения
, скольжения  , и количества пар полюсов статора
, и количества пар полюсов статора  .
.
Регулирование частоты тока  в обмотках статора двигателя может осуществляться тиристорным регулятором частоты, конструкция которого достаточно сложна. При этом происходит плавное регулирование частоты вращения магнитного поля статора.
в обмотках статора двигателя может осуществляться тиристорным регулятором частоты, конструкция которого достаточно сложна. При этом происходит плавное регулирование частоты вращения магнитного поля статора.
Регулирование скольжения  производится путём изменения подводимого напряжения в цепи статора с помощью трёхфазного автотрансформатора, либо симисторного регулятора, схемы которых приведены выше.
производится путём изменения подводимого напряжения в цепи статора с помощью трёхфазного автотрансформатора, либо симисторного регулятора, схемы которых приведены выше.
Регулирование частоты вращения асинхронного двигателя путём изменения количества пар полюсов статора  , является ступенчатым. Так, если
, является ступенчатым. Так, если  , то количество обмоток статора равно шести. На каждую фазу приходится по две обмотки. При последовательном соединении звездой двух обмоток, соединённых согласно (рис.6.21), получим четырёхполюсное магнитное поле с количеством пар полюсов
, то количество обмоток статора равно шести. На каждую фазу приходится по две обмотки. При последовательном соединении звездой двух обмоток, соединённых согласно (рис.6.21), получим четырёхполюсное магнитное поле с количеством пар полюсов  , которое будут вращаться с чатотой в минуту
, которое будут вращаться с чатотой в минуту  , или в два раза меньше, чем у двухполюсного магнитного поля с количеством пар полюсов
, или в два раза меньше, чем у двухполюсного магнитного поля с количеством пар полюсов  , у которого частота вращения магнитного поля статора в минуту
, у которого частота вращения магнитного поля статора в минуту  .
.
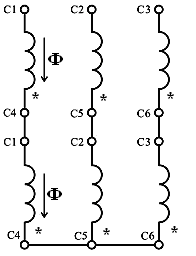
Р ис.6.21. Схема последовательного соединения обмоток статора асинхронного двигателя, соединённых звездой, и образующих четырёхполюсное магнитное поле
На рис.6.22 изображена схема параллельного соединения статорных обмоток, подключенных встречно двойной звездой. Переключение секций фазных обмоток со звезды на двойную звезду происходит при постоянных значениях вращающегося максимального момента и пускового момента.
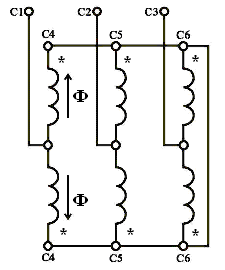
Рис.6.22. Схема параллельного соединения обмоток статора асинхронного двигателя, соединённых двойной звездой, и образующих двухполюсное магнитное поле
Механические характеристики преключения фазных обмоток приведены на рис.6.23.
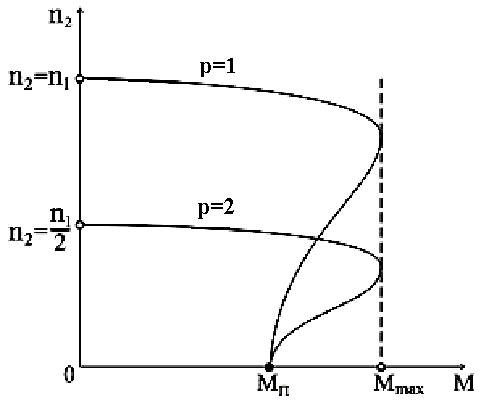
Рис.6.23. Механические характеристики асинхронного двигателя со ступенчатым регулированием частоты вращения
Для регулирования частоты вращения асинхронных двигателей с фазным ротором применяется способ реостатного регулирования скольжения ротора путём изменения активного сопротивления его фазных обмоток.
Полупроводниками называются материалы, занимающие промежуточное положение между проводниками и диэлектриками. У металлов удельное сопротивление ρ= -
- Ом·м, у диэлектриков ρ=
Ом·м, у диэлектриков ρ= -
- Ом·м, у полупроводников ρ=
Ом·м, у полупроводников ρ= -
- Ом·м. Наибольшее распространение получили полупроводниковые материалы кремний Si и германий Ge. Особенностью проводников является наличие свободных электронов – носителей электрических зарядов. В диэлектриках свободных электронов нет. В отличие от проводников полупроводники имеют не только электронную, но и дырочную электропроводности, которые зависят от температуры окружающей среды, наличия освещённости, электрического поля, примесей и других факторов. Кристаллическая решетка полупроводника имеет парноэлектронную связь атомов. На рис 7.1 приведены схематические изображения парноэлектронной связи атомов.
Ом·м. Наибольшее распространение получили полупроводниковые материалы кремний Si и германий Ge. Особенностью проводников является наличие свободных электронов – носителей электрических зарядов. В диэлектриках свободных электронов нет. В отличие от проводников полупроводники имеют не только электронную, но и дырочную электропроводности, которые зависят от температуры окружающей среды, наличия освещённости, электрического поля, примесей и других факторов. Кристаллическая решетка полупроводника имеет парноэлектронную связь атомов. На рис 7.1 приведены схематические изображения парноэлектронной связи атомов.


Рис 7.1. Схематические изображения парноэлектронной связи атомов
Кристаллическая решётка четырёхвалентного германия изображена на рис.7.2.
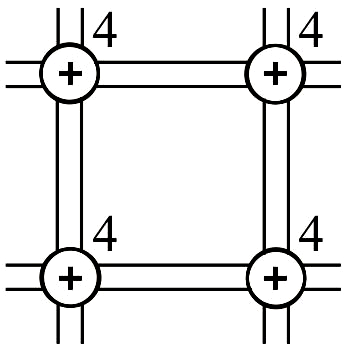
Рис 7.2. Кристаллическая решётка четырёхвалентного германия
Каждый атом германия образует парноэлектронную связь с четырмя соседними атомами. При отсутствиии примесей и температуре окружающей среды, близкой к абсолютному нулю, свободных электронов нет и германий не обладает электропроводностью. При повышении температуры окружающей среды появляются свободные электроны, которые под действием внешнего электрического поля перемещаются, и возникает электрический ток. Электропроводность, обусловленная перемещением свободных электронов, называется электронной электропроводностью полупроводника или n – электропроводностью. Дырки перемещаются противоположно движению электронов.
На рис.7.3 изображена схема образования свободного электрона, а так же перемещения электронов и заполнения дырок в кристалле германия.
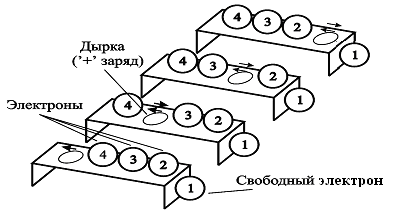
Рис 7.3. Схема образования свободного электрона, а так же перемещения электронов и заполнения дырок в кристалле германия
Электропроводность, возникающая в результате перемещения дырок, называется дырочной электропроводностью или p – электропроводностью. Рассмотренные n и p – электропроводности, носят названия собственных электропроводностей.
Вводя в кристалл полупроводника примеси других элементов, можно получить примесные электропроводности либо n, либо p – электропроводности. Пятивалентные элементы: мышьяк, сурьма, фосфор образуют свободные электроны. Трёхвалентные элементы: индий, галлий, алюминий способствуют появлению свободных дырок. На рисунках 7.4 и 7.5 изображены схемы связи различных примесей с германием.
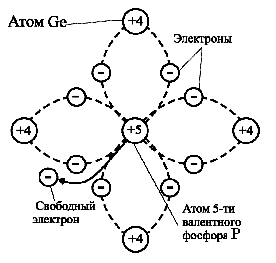
Рис.7.4. Схема замещения в кристаллической решётке атома германия пятивалентным атомом фосфора
Замещение в кристаллической решётке атома германия Ge пятивалентным атомом фосфора P, способствует образованию свободного электрона, что соответствует электронной n – электропроводности. Такая электропроводность называется донорской. Атом фосфора, потеряв электрон, становится неподвижным положительным ионом.
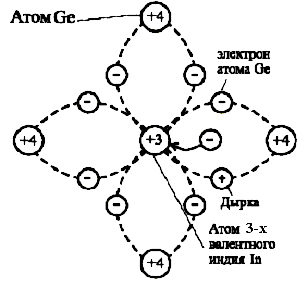
Рис.7.5. Схема замещения в кристаллической решетке атома германия атомом трёхвалентного индия
Замещение в кристаллической решетке атома германия Ge атомом трехвалентного индия In, образует ковалентную связь с тремя атомами германия. Такая связь образует дырочную p – электропроводность и называется акцепторной. Атом индия превращается в неподвижный отрицательный ион.
studfiles.net
Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
Государственное образовательное учреждение
Высшего профессионального образования
«Комсомольский-на-Амуре государственный технический университет»
Кафедра «Электрические машины»
Отчёт по лабораторной работе №4:
«ПУСК И РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННЫХ КОРОТКОЗАМКНУТЫХ ДВИГАТЕЛЕЙ»
Студенты: Старцев А.А.
Исангалин Р.Х.
Группа: 3ЭЛ-1
Преподаватель: Герасименко Т.В.
2006 г.
Цель работы: изучить способы пуска, изменения направления вращения, регулирования частоты вращения трехфазных и однофазных асинхронных короткозамкнутых двигателей.


а) б) в)
Рис. 1 Схемы пуска двигателя:
а - прямой пуск;
б - емкостной пуск;
в - реостатный пуск;

Рис. 2 Схема включения двигателя на низшую частоту вращения

Рис. 3 Схема включения двигателя на высшую частоту вращения
1. Прямой пуск:
ω = 1400 об/мин.
При смене чередования фаз:
ω = 1350 об/мин
2. Емкостной пуск:
ω = 1400 об/мин
3.Реостатный пуск:
ω = 1400 об/мин.
4. Включение двигателя на низшую частоту вращения:
ω = 400 об/мин.
5. Включение двигателя на высшую частоту вращения:
ω = 900 об/мин.
Вывод: ходе выполнения лабораторной работы мы изучили способы пуска, изменения направления вращения, регулирования частоты вращения трехфазных и однофазных асинхронных короткозамкнутых двигателей.
Основным для короткозамкнутых асинхронных двигателей является прямой пуск (рис.1 а.), то есть пуск непосредственным включением двигателя на напряжение сети.
Пуск однофазных асинхронных двигателей или трехфазных двигателей, работающих в однофазном режиме осуществляется путем подключения в цепь пусковой обмотки фазосдвигающего элемента, чаще всего емкости (рис.1 б.).
Изменение направления вращения асинхронных двигателей осуществляется изменением направления вращения магнитного поля. В трехфазных асинхронных двигателях это достигается изменением чередования фаз питающей сети; для двигателей, работающих в однофазном режиме, для изменения направления вращения необходимо изменять направление тока в одной из обмоток.
Регулировать частоту вращения асинхронных короткозамкнутых двигателей можно только со стороны статора: изменением подводимого к двигателю напряжения; изменением частоты сети; изменением числа нар полюсов.
Регулирование частота вращения посредством изменения первичного напряжения имеет второстепенное значение, так как не позволяет изменять частоту вращения в широких пределах и к тому же не является экономичным.
Регулирование изменением частоты сети возможно только при питании двигателя от специальных установок.
Переключение числа пар полюсов не требует дополнительных внешних устройств, но возможно лишь при применении специальной полюсопереключаемой обмотки двигателя. Регулирование при этом получается не плавным, а ступенчатым. Существует несколько способов переключения числа нар полюсов обмотки. Чаще других применяется способ переключения посредством изменения направления тока в отдельных полуобмотках фазы.
3
studfiles.net
|
Поиск Лекций
Пуск двигателей сопровождается резким скачком тока, что может вызвать колебания напряжения сети и неблагоприятно отразиться на работе соседних потребителей энергии. Существует несколько способов пуска. Наиболее распространенный - это прямой пуск, когда обмотка статора включается на полное напряжение сети. При этом допустимый пусковой ток может превышать номинальный ток двигателя в 4…7 раз. Процесс пуска проходит достаточно быстро (несколько секунд) и такой большой ток не вызывает разрушения двигателя и нарушения нормальной работы питающей сети. Если прямой пуск невозможен (пусковой ток превышает допустимый или падение напряжения в сети при пуске более 30%, ∆U > 30% от UH), то используются способы пуска от пониженного напряжения (автотрансформаторный, реакторный, переключением обмотки статора со "звезды" на "треугольник"). При этом следует помнить, что при снижении напряжения (любым из перечисленных способов) пусковой момент уменьшается в квадратичной зависимости, т. е М ≡ U2. Пуск двигателей с фазным ротором осуществляют введением в каждую фазу ротора добавочного активного сопротивления. Пусковой момент асинхронного двигателя пропорционален активному сопротивлению фазы ротора; МП ≡ r'2. Поэтому такой пуск обеспечивает большой пусковой момент, снижает пусковой ток, что особенно важно для двигателей большой мощности. По мере разгона ротора двигателя добавочные активные сопротивления выводятся из цепей ротора, т. е. пусковой реостат рассчитывается на время пуска (кратковременная работа). Обычно пусковой реостат имеет одну, две или три ступени. Скорость вращения двигателей с короткозамкнутым ротором регулируют либо изменением частоты питающего напряжения (двигатель или группа двигателей питается от преобразователя частоты), либо изменением числа пар полюсов (переключением схемы обмотки статора). В обоих случаях изменяется скорость вращения магнитного поля, однако в первом случае ее можно изменять плавно, а во втором - только ступенчато (1500 - 750 об/мин, 1000 - 500 об/мин). Скорость вращения ротора двигателя с контактными кольцами регулируют изменением активного сопротивления обмотки ротора (введением добавочного сопротивления). Пример 1 Номинальная мощность трехфазного асинхронного двигателя с короткозамкнутым ротором РН = 0,55 кВт, номинальное напряжение при соединении обмотки статора в звезду UH = 380 В, номинальная частота вращения nH = 1370 об/мин, номинальный КПД ηН = 70,5%, номинальный коэффициент мощности cosφH = 0,7. Кратность пускового тока kП = IП/IН = 6,5, перегрузочная способность двигателя km = Мm/МН = 1,8. Определить: потребляемую мощность Р1Н, номинальный и максимальный вращающие моменты, пусковой ток, номинальное и критическое скольжения. Построить механическую характеристику M = f(s). Решение Потребляемая мощность
Вращающие моменты: номинальный
максимальный Мm = km·МН = 1,8·3,83 = 6,9 Н·м. Номинальный и пусковой токи
Номинальное и критическое скольжения
Механическая характеристика M = f(s) строится по уравнению
Задаваясь скольжением от s = 0 до s = 1, рассчитываем момент двигателя. Графическая зависимость показана на рис. 2.3.
Варианты контрольных заданий для задачи №1 Условие задачи №1 Трехфазный асинхронный двигатель с короткозамкнутым ротором включён в сеть с номинальным напряжением UH = 380 B и частотой f = 50 Гц. Обмотка статора соединена в звезду. Данные двигателя приведены в таблице 1. Определить: потребляемую мощность, номинальный и максимальный моменты, пусковой ток, номинальное и критическое скольжения. Построить механическую характеристику M = f(s). Таблица 1 - Номинальные данные двигателей
Вопросы для самоконтроля 1. Устройство асинхронных двигателей. 2. Как выполняется магнитопровод двигателя? 3. От чего зависит частота вращения магнитного поля статора? 4. От чего зависит скольжение и в каких пределах оно изменяется в двигательном режиме работы? 5. Какова частота токов в роторе при установившемся режиме? 6. Изобразите механическую характеристику М = f (s) двигателя и покажите на ней пусковой, максимальный и номинальный моменты? 7. Как влияет величина питающего напряжения на вращающий момент двигателя? 8. Что показывают механические характеристики двигателя? 9. Перечислите преимущества двигателя с фазным ротором по сравнению с короткозамкнутым двигателем. 10. 0. Как осуществляется пуск асинхронных двигателей? 11. Назовите допустимые значения пускового тока короткозамкнутого двигателя. 12. Начертите простейшую схему управления 3х фазным асинхронным двигателем. 13. Как осуществляется реверсирование двигателя? 14. Перечислите способы регулирования частоты вращения асинхронных двигателей с короткозамкнутым и фазным роторами. Выбор электродвигателя Выбор электродвигателя осуществляется по роду тока и напряжения, конструктивному исполнению, мощности и режимам работы. Наиболее простыми в эксплуатации и надежными в работе являются асинхронные двигатели, применяемые для электроприводов промышленных рабочих механизмов. Однако такие двигатели не могут обеспечить достаточный диапазон регулирования частоты вращения. Синхронные двигатели применяются для рабочих механизмов с продолжительным режимом работы, не требующих частых пусков и регулирования частоты вращения. Двигатели постоянного тока применяются реже и в тех случаях, когда двигатели переменного тока не обеспечивают необходимых характеристик рабочего механизма (обычно при регулировании частоты вращения в широких пределах). Выбор по конструктивному исполнению учитывает условия эксплуатации электропривода, под которыми следует понимать воздействие климатических факторов окружающей среды, способ охлаждения и особенности монтажа двигателя. Различают несколько типов конструкции двигателей: открытого, защищенного, закрытого. В сырых помещениях применяются защищенные двигатели со специальной влагостойкой изоляцией. Во взрывоопасных помещениях, содержащих горючие пары или газы, устанавливаются взрывозащищенные двигатели. Правильный выбор мощности двигателя для привода должен удовлетворять требованиям экономичности, производительности и надежности рабочего механизма. Установка двигателя большей мощности, чем это необходимо по условиям привода, вызывает излишние потери энергии, увеличение габаритов двигателя и требует дополнительные капвложения. Установка двигателя недостаточной мощности снижает производительность рабочей машины и делает ее работу ненадежной, а сам двигатель в подобных условиях может легко выйти из строя. Двигатель должен быть выбран так, чтобы его мощность использовалась, возможно, полнее. Во время работы двигатель должен нагреваться до предельно допустимой температуры, но не выше ее. Кроме того, двигатель должен нормально работать при возможных временных перегрузках и развивать пусковой момент, требуемый для данного рабочего механизма. Мощность двигателя выбирается в большинстве случаев на основании условий нагрева, а затем осуществляется проверка соответствия перегрузочной способности двигателя условиям пуска машины и временным перегрузкам. Нагрев электродвигателя определяется режимом его работы, т. е. соотношением длительности периодов работы и пауз между ними, частотой включения двигателя. В зависимости от времени включения двигателя, соотношения продолжительности работы и пауз, а также от характера изменения нагрузки различают три режима работы электродвигателей: продолжительный, кратковременный, повторно-кратковременный. Продолжительный режим работы (условное обозначение S1) – это режим работы такой длительности, когда при практически неизменной нагрузке и температуре окружающей среды двигатель нагревается до установившегося значения. В таком режиме работают электроприводы компрессоров, вентиляторов, дымососов, конвейеров непрерывного транспорта и т. д. Кратковременный режим (условное обозначение S2) – это режим работы, при котором периоды нагрузки чередуются с периодами отключения (пауз) двигателя. Причем за время работы температура частей двигателя не успевает достигнуть установившегося значения, а за время пауз двигатель охлаждается до температуры окружающей среды. Повторно-кратковременный режим (условное обозначение S3, S4, S5) – это такой режим работы, при котором периоды работы чередуются с паузами, причем ни в один из периодов работы температура двигателя не достигает установившегося значения, а во время снятия нагрузки двигатель не успевает охладиться до температуры окружающей среды. Двигатели, выпускаемые промышленностью для такого режима работы, характеризуются продолжительностью включения (ПВ), которая устанавливается по продолжительности одного цикла работы
где tp – время работы двигателя; tп – время паузы. ПВ стандартизованы и составляют 15, 25, 40, 60, 100 %. Значение ПВ указывается на паспорте двигателя. К механизмам с повторно-кратковременным режимом работы можно отнести металлообрабатывающие и деревообрабатывающие станки, краны, прокатные станы и т. д. |
|
poisk-ru.ru
Пуск в ход асинхронных двигателей
При включении асинхронного двигателя в сеть переменного тока по обмоткам его статора и ротора будут проходить токи, в несколько раз больше номинальных. Это объясняется тем, что при неподвижном роторе вращающееся магнитное поле пересекает его обмотку с большой частотой, равной частоте вращения магнитного поля в пространстве, и индуктирует в этой обмотке большую эдс. Эта эдс создает большой ток в цепи ротора, что вызывает возникновение соответствующего тока и в обмотке статора.
При увеличении частоты вращения ротора скольжение уменьшается, что приводит к уменьшению эдс и тока в обмотке ротора. Это, в свою очередь, вызывает уменьшение тока в обмотке статора. Большой пусковой ток нежелателен как для двигателя, так и для источника, от которого двигатель получает энергию. При частых пусках большой ток приводит к резкому повышению температуры обмоток двигателя, что может вызвать преждевременное старение их изоляции. В сети при больших токах понижается напряжение, которое оказывает влияние на работу других приемников энергии, включенных в эту же сеть.
Поэтому прямой пуск двигателя непосредственным включением его в сеть допускается только в том случае, когда мощность двигателя, намного меньше мощности источника энергии, питающего сеть.
Схема включения пускового реостата
в цепь фазного ротора асинхронного двигателя Если мощность двигателя соизмерима с мощностью источника энергии, то
необходимо уменьшить ток, потребляемый этим двигателем при пуске в ход.
Двигатели с фазным ротором обладают очень хорошими пусковыми свойствами.
Для уменьшения пускового тока обмотку ротора замыкают на активное сопротивление,
называемое пусковым реостатом (изо).
Если мощность двигателя соизмерима с мощностью источника энергии, то
необходимо уменьшить ток, потребляемый этим двигателем при пуске в ход.
Двигатели с фазным ротором обладают очень хорошими пусковыми свойствами.
Для уменьшения пускового тока обмотку ротора замыкают на активное сопротивление,
называемое пусковым реостатом (изо).
При включении такого сопротивления в цепь обмотки ротора ток в ней уменьшается, а следовательно, уменьшаются токи как в обмотке статора, так и потребляемый двигателем из сети. При этом увеличится активная составляющая тока ротора и, следовательно, вращающий момент, развиваемый двигателем при пуске в ход.
Пусковые реостаты имеют несколько контактов, поэтому можно постепенно уменьшать сопротивление, введенное в цепь обмотки ротора. После достижения ротором нормальной частоты вращения реостат полностью выводится, т. е. обмотку ротора замыкают накоротко.
При нормальной частоте ротора скольжение мало и эдс, индуктируемая в его обмотке, также незначительна. Поэтому никакие добавочные сопротивления в цепи ротора не нужны. Пусковые реостаты работают непродолжительное время в процессе разгона двигателя и рассчитываются на кратковременное действие. Если оставить реостат включенным длительное время, то он выйдет из строя.
Двигатели с короткозамкнутым ротором при малой мощности их по сравнению с мощностью источника энергии пускают в ход непосредственным включением в сеть. При большой же мощности двигателей пусковой ток уменьшают, понижая приложенное напряжение. Для понижения напряжения на время пуска двигатель включают в сеть через понижающий автотрансформатор или реакторы. При вращении ротора с нормальной частотой вращения двигатель переключают на полное напряжение сети.
Недостатком такого способа пуска двигателя в ход является резкое уменьшение
пускового момента. Для уменьшения пускового тока в N
раз необходимо приложенное напряжение понизить также в N
раз. При этом пусковой момент, пропорциональный квадрату напряжения,
уменьшится в N раз. Таким образом, понижение напряжения допустимо при пуске двигателя
без нагрузки или при малых нагрузках, когда пусковой момент может быть
небольшим.
Схема пуска короткозамкнутого асинхронного двигателя с переключением
обмотки статора со звезды на треугольник.
раз. Таким образом, понижение напряжения допустимо при пуске двигателя
без нагрузки или при малых нагрузках, когда пусковой момент может быть
небольшим.
Схема пуска короткозамкнутого асинхронного двигателя с переключением
обмотки статора со звезды на треугольник. Часто двигатель пускают в ход посредством переключения обмотки статора
со звезды на треугольник (изо). В момент пуска обмотку статора соединяют
звездой, а после того как двигатель разовьет частоту вращения, близкую
к нормальной, ее переключают треугольником.
При таком способе пуска двигателя в ход пусковой ток в сети уменьшается
в три раза по сравнению с пусковым током, который потреблялся бы двигателем,
если бы при пуске обмотка статора была соединена треугольником.
Часто двигатель пускают в ход посредством переключения обмотки статора
со звезды на треугольник (изо). В момент пуска обмотку статора соединяют
звездой, а после того как двигатель разовьет частоту вращения, близкую
к нормальной, ее переключают треугольником.
При таком способе пуска двигателя в ход пусковой ток в сети уменьшается
в три раза по сравнению с пусковым током, который потреблялся бы двигателем,
если бы при пуске обмотка статора была соединена треугольником.
Этот способ пуска можно применять для двигателя, обмотка статора которого при питании от сети данного напряжения должна быть соединена треугольником.
feklistovstudio.narod.ru
1.Регулирование частоты вращения АД с КЗ ротором 2
2.Пуск АД с фазным ротором 5
3.Регулирование частоты вращения АД с фазным ротором. 7
4.Пуск в ход асинхронных двигателей с КЗ ротором и фазным ротором. 8
5.Асинхронные двигатели с улучшенными пусковыми характеристиками 12
6.Однофазный асинхронный двигатель. 14
Устройство, принцип действия. Способы пуска. Разновидности. 14
7.Устройство,принцип действия, режимы работы АМ 15
8.Трехфазная асинхронная машина при неподвижном роторе. Основные уравнения для цепей статора и ротора. Параметры короткозамкнутой обмотки ротора. Приведение параметров вторичной цепи к числу витков и фаз первичной. 18
9.Трехфазная АМ при вращающемся роторе. Уравнения намагничивающих сил, токов и напряжений. 20
10.Электрическая схема замещения асинхронной машины. 23
11.Векторные диаграммы для режимов двигателя, генератора, 26
электромагнитного тормоза. 26
12.Энергетические диаграммы асинхронной машины 28
(двигатель, генератор, эм тормоз) 28
13.Зависимость КПД от полезной мощности на валу в режиме двигателя. 31
14.Электромагнитный момент АМ. Начальный пусковой, 32
максимальный и номинальный моменты. 32
15.Уравнение моментов. Механическая характеристика АМ. 34
Статическая устойчивость работы АМ в режиме двигателя. 34
16.Электрическая схема замещения АМ. (рис. 2 [10]) 36
Определение параметров схемы замешения из опытов хх и кз. 36
17.Создание вращающегося магнитного поля. Эллиптические, круговые и пульсирующие м. поля. Деформация и реверсирование вращающихся полей. 38
Частота вращения ротора асинхронного двигателя 
Из этого выражения следует, что частоту вращения ротора асинхронного двигателя можно регулировать изменением какой-либо из трех величин: скольжения s, частоты тока в обмотке статора f1 или числа полюсов в обмотке статора 2р. Регулирование частоты вращения изменением скольжения s возможно следующими способами: изменением подводимого к обмотке статора напряжения; нарушением симметрии этого напряжения.
Регулирование частоты вращения изменением подводимого (первичного) напряжения: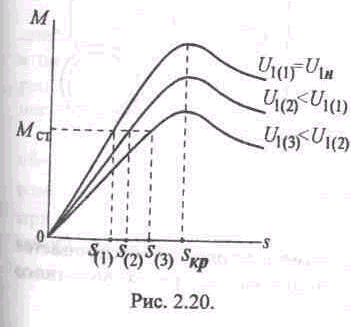
Вращающий момент АД пропорционален  , поэтому механические характеристики двигателя при напряжениях меньших номинального располагаются ниже естественной. Это объясняется недопустимостью подведения напряжения выше номинального. Если статический момент МСТ остается постоянным, то при снижении напряжения на обмотке статора скольжение АД увеличивается, частота вращения ротора уменьшается. Регулирование скольжения этим способом возможно в пределах 0 < s < sКР. Диапазон регулирования частоты вращения получается небольшим, что объясняется узкой зоной устойчивой работы двигателя. Диапазон ограничен недопустимостью значительного превышения номинального напряжения и значением критического скольжения. С превышением номинального напряжения возникает опасность чрезмерного нагрева АД, вызванного резким увеличением электрических и магнитных потерь. Двигатель с более значительным критическим скольжением имеет большее значение электрических потерь, а значит и меньший КПД. С уменьшением напряжения U1 двигатель утрачивает перегрузочную способность и при нагрузках близких к номинальной происходит увеличение суммарных потерь и нагрева АД. Узкий диапазон регулирования и неэкономичность – недостатки. В данном способе регулирования могут быть применены схемы с использованием регулировочного автотрансформатора; дросселем насыщения; тиристорным регулятором напряжения.
, поэтому механические характеристики двигателя при напряжениях меньших номинального располагаются ниже естественной. Это объясняется недопустимостью подведения напряжения выше номинального. Если статический момент МСТ остается постоянным, то при снижении напряжения на обмотке статора скольжение АД увеличивается, частота вращения ротора уменьшается. Регулирование скольжения этим способом возможно в пределах 0 < s < sКР. Диапазон регулирования частоты вращения получается небольшим, что объясняется узкой зоной устойчивой работы двигателя. Диапазон ограничен недопустимостью значительного превышения номинального напряжения и значением критического скольжения. С превышением номинального напряжения возникает опасность чрезмерного нагрева АД, вызванного резким увеличением электрических и магнитных потерь. Двигатель с более значительным критическим скольжением имеет большее значение электрических потерь, а значит и меньший КПД. С уменьшением напряжения U1 двигатель утрачивает перегрузочную способность и при нагрузках близких к номинальной происходит увеличение суммарных потерь и нагрева АД. Узкий диапазон регулирования и неэкономичность – недостатки. В данном способе регулирования могут быть применены схемы с использованием регулировочного автотрансформатора; дросселем насыщения; тиристорным регулятором напряжения.
Регулирование частоты вращения нарушением симметрии подводимого напряжения:
При нарушении симметрии трехфазной системы переменного напряжения, подводимой к АД, вращающееся магнитное поле статора становится эллиптическим. Такое поле содержит обратную составляющую (встречное поле), которая создает момент Мобр, направленный встречно вращающему моменту Мпр, поэтому результирующий электромагнитный момент АД уменьшается:  .
.
Недостатками этого способа регулирования являются узкий диапазон регулирования и уменьшение КПД двигателя при увеличении несимметрии напряжения.
Регулирование частоты вращения изменением частоты тока в обмотке статора. Это способ регулирования основан на изменении синхронной частоты вращения  , что возможно при наличии источника питания АД с регулируемой частотой -преобразователя частоты (ПЧ). Частотное регулирование позволяет плавно изменять частоту вращения ротора в широком диапазоне. Чтобы регулировать частоту вращения, достаточно изменить частоту тока f1, но при этом будет изменяться и максимальный электромагнитный момент АД. Поэтому для сохранения неизменными перегрузочной способности, коэффициента мощности и КПД двигателя на требуемом уровне необходимо одновременно с изменением частоты f1 изменять и величину подводимого к обмотке статора напряжения U1.
, что возможно при наличии источника питания АД с регулируемой частотой -преобразователя частоты (ПЧ). Частотное регулирование позволяет плавно изменять частоту вращения ротора в широком диапазоне. Чтобы регулировать частоту вращения, достаточно изменить частоту тока f1, но при этом будет изменяться и максимальный электромагнитный момент АД. Поэтому для сохранения неизменными перегрузочной способности, коэффициента мощности и КПД двигателя на требуемом уровне необходимо одновременно с изменением частоты f1 изменять и величину подводимого к обмотке статора напряжения U1.
1) Если частота вращения ротора АД регулируется при постоянном моменте нагрузки  , то подводимое к обмотке статора напряжение необходимо изменять пропорционально изменению частоты тока:
, то подводимое к обмотке статора напряжение необходимо изменять пропорционально изменению частоты тока:  .
.
1)
2) Если регулирование производится при условии постоянства мощности двигателя  , то подводимое напряжение к обмотке статора следует изменять в соответствии с законом
, то подводимое напряжение к обмотке статора следует изменять в соответствии с законом 
2)

Регулирование частоты вращения изменением числа полюсов обмотки статора.
Этот способ регулирования частоты вращения обеспечивает ступенчатую регулировку. Изменять число полюсов обмотки статора можно либо укладкой в пазах статора двух обмоток с разным числом полюсов, либо укладкой одной обмотки, конструкция которой позволяет путем переключения катушечных групп получать различное число полюсов. Второй способ получил наибольшее применение. АД с полюсно-переключаемыми обмотками могут работать в двух режимах: режим постоянного момента, режим постоянной мощности.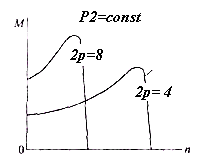
studfiles.net
Количество просмотров публикации ПУСК, РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ И ТОРМОЖЕНИЕ АСИНХРОННОГО ДВИГАТЕЛЯ. - 241
РАБОЧИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ
Эти характеристики снимаются экспериментально и представляют из себязависимость I1, М2, n2, cosj, h от нагрузки на валу двигателя P2.
Примерный вид характеристик приведен на рис. 5.12.1.
На практике замечено, что ток, потребляемый обмоткой статора в первый момент пуска двигателя, очень большой. В ряде случаев он превышает номинальный ток в 6 - 10 раз.
Такой нагрузки может не выдержать не только питающая сеть, но и сама обмотка статора. По этой причине для пуска крупных асинхронных двигателей применяют специальные устройства, снижающие пусковой ток. На рис. 5.13.1. показаны схемы пуска мощных двигателей с помощью реакторов и автотрансформатора.
Принцип ограничения тока состоит по сути в том, что к статорной обмотке двигателя на период пуска подводится пониженное напряжение. После разгона его дополнительные устройства от двигателя отключаются.
Иногда для снижения напряжения, подаваемого в обмотки статора, изменяют схему переключения обмоток. К примеру, асинхронный двигатель нормально работает по схеме "треугольник". В случае если на период пуска его обмотки включить "звездой", то на каждую фазу придется напряжение в раз меньшее.
Двигатели с фазным ротором пускаются в работу с помощью дополнительных сопротивлений. Вводя дополнительные сопротивления в цепь ротора, добиваются ограничения пускового тока.
Регулирование частоты вращения асинхронного двигателя определяется формулой:
.
Здесь возможны три различных способа реализации:
Первый состоит в изменении частоты тока f, подаваемого в обмотки двигателя. Этот способ позволяет осуществлять плавное регулирование частоты вращения двигателя. Регуляторы частоты тока пока еще очень дороги, в связи с этим они мало применяются.
Второй способ связан с изменением пар полюсов p на статоре.
Укладывая на статоре несколько обмоток, рассчитанных на различные числа пар полюсов (р=1,2,3,4), можно обеспечить различные частоты вращения магнитного поля (соответственно: 3000, 1500, 1000, 750 об/мин). Подключение к сети крайне важно й обмотки производится специальным переключателем.
Этот способ регулирования ступенчатый, но в ряде металлообрабатывающих станков он нашел самое широкое применение (к примеру, для привода продольно-строгального станка при рабочем и обратном ходе).
Третий способ регулирования частоты вращения возможен лишь для двигателей с фазным ротором. Здесь изменение скольжения S достигается введением в цепь ротора регулировочных сопротивлений. Такие схемы широко используются на грузоподъемных кранах.
К категории регулирования вращения вала двигателя относится так называемое реверсирование, ᴛ.ᴇ. изменение направления вращения на обратное. Осуществляется оно путем изменения порядка чередования фаз обмотки статора. На рис. 5.13.2. показана схема изменения направления вращения вала двигателя.
Торможение асинхронного двигателя должна быть механическим и электрическим.
К механическим относятся торможения муфтами, электромагнитными лентами, колодками и т.д.
Иногда применяют электродинамическое торможение, когда после отключения двигателя от сети переменного тока в его обмотки подается постоянный ток. В этом случае постоянное магнитное поле заметно сокращает выбег ротора.
Чаще используется торможение "противовыключением". После отключения двигателя от сети его кратковременно включают на вращение в обратную сторону. Как только оставшаяся частота вращения ротора n2 станет равной нулю, двигатель отключается от сети.
referatwork.ru
 Рис. 2.2 – Механическая характеристика
Рис. 2.2 – Механическая характеристика

 Рис. 2.3
Рис. 2.3