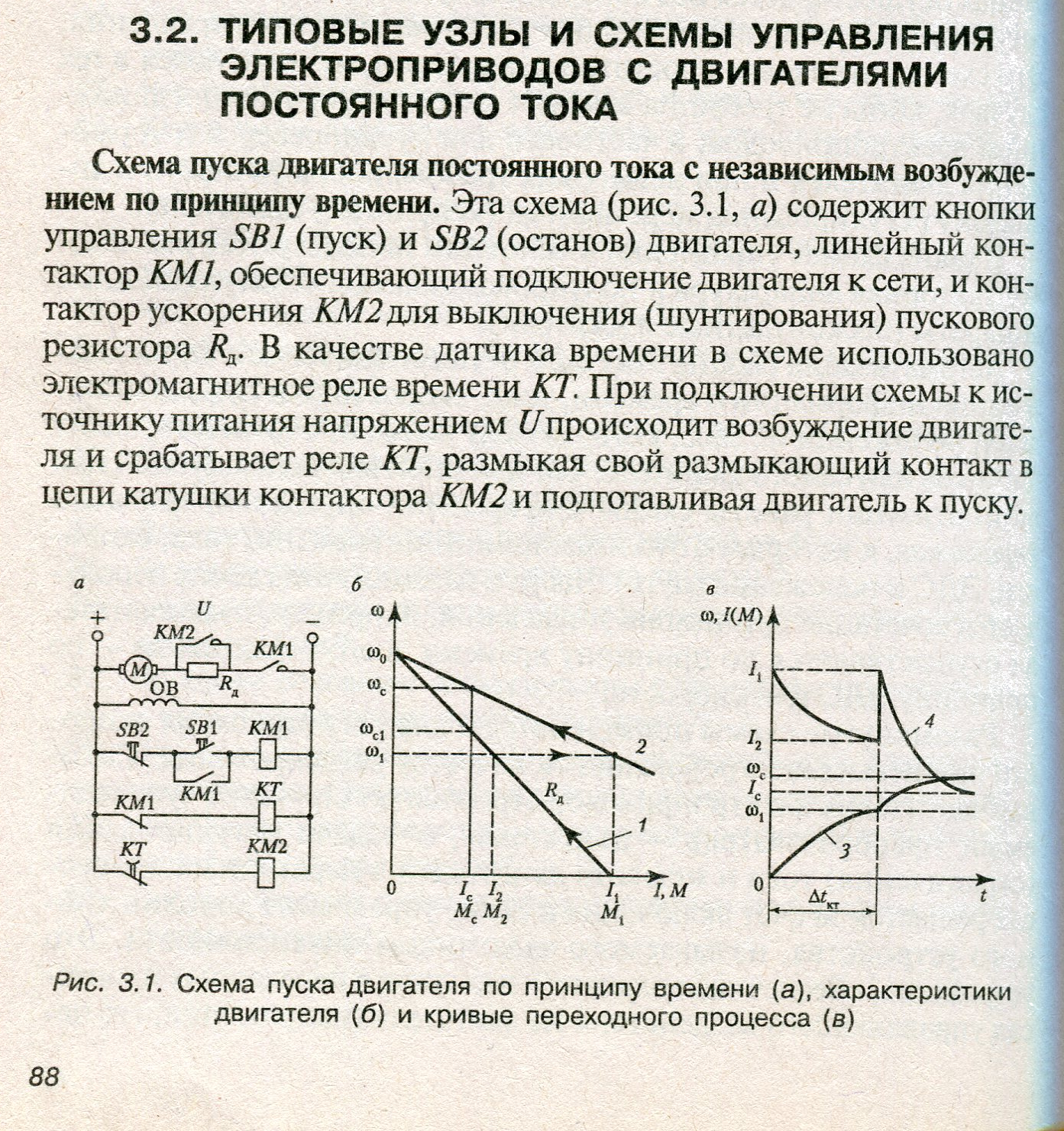
| 33. Достоинства и недостатки синхронного двигателя. Пуск синхронного двигателя. Главное преимущество синхронного двигателя перед асинхронным - это обеспечение синхронной скорости вращения ротора при значительных колебаниях нагрузки. Синхронные машины в принципе не имеют пускового момента и не могут самостоятельно разгоняться до синхронной скорости, т.к. при включении статора в сеть его магнитное поле и ротор вращаются с разными скоростями.В первый момент пуска двигателя вращающееся магнитное поле статора возникает практически мгновенно. Ротор же, обладая значительной инерционной массой, прийти в синхронное вращение сразу не сможет. Его надо "разогнать" до подсинхронной скорости каким-то дополнительным устройством.Долгое время роль разгонного двигателя играл обычный асинхронный двигатель, механически соединенный с синхронным. Ротор синхронного двигателя приводится во вращение до подсинхронной скорости. Далее двигатель сам втягивается в синхронизм. Обычно мощность пускового двигателя составляет 5-15 % от мощности синхронного двигателя. Это позволяет пускать в ход синхронный двигатель только вхолостую или при малой нагрузке на валу.Применение пускового двигателя мощностью, достаточной для пуска синхронного двигателя под нагрузкой делает такую установку громоздкой и дорогой.В последнее время использ. так называемая система асинхронного пуска синхронных двигателей. С этой целью в полюсные наконечники забивают стержни, напоминающие собою короткозамкнутую обмотку асинхронного двигателя (рис. 6.3.2.1). В начальный период пуска синхронный двигатель работает как асинхронный, а в последующем - как синхронный. В целях безопасности обмотку возбуждения в начальном периоде пуска закорачивают, а на заключительном подключают к источнику постоянного тока. | 35.Переходные процессы и выбор мощности двигателя. От прав. выбора мощности ЭД зависят себестоимость, габариты, экономичность, надежность в эксплуатации и др.).Если нагрузка на электродвигатель стабильная, то определение его мощности ограничивается лишь выбором по каталогу: Рн > Рнагр где Рн – мощ. выбираемого двиг.,Рнагр – мощ. нагрузки. Если же нагрузка на ЭД переменная, то необходимо иметь график нагрузки I = f(t).Плавную кривую заменяют ступенчатой линией, полагая, что за время t1 в двигателе течет ток I1, за время t2 - ток I2 и. т.д. (рис. 8.3.1 ). Изменяющийся ток заменяют эквив. ему током Iэ, который за время одного цикла работы tц произв/ одинак тепловое действие с током, изменяющ. ступенями. Номинальный ток ЭД должен быть равным или больше эквивалентного, т.е. | 45.Простейшая схема управления двигателем постоянного тока, её основные элементы и их назначение. | 34.Конструкция и принцип действия шагового двигателя, управление двигателем. Шаговые двиг. служат для преобраз. импульсного или кодового сигнала в угловое перемещение. В последнее время в связи с развитием компьютерной техники и технологии их область применения постоянно расширяется. Шаговый ЭД - вращающийся ЭД с дискретными угловыми перемещениями ротора, осуществляемыми за счет импульсов сигнала управления. Шаговые, или импульсные, ЭД преобразуют электрические импульсы в фиксированные угловые перемещения - "шаги". Этот тип двигателя является машиной постоянного тока, хотя принцип действия его напоминает синхронный реактивный двигатель.Как видно из рис. 6.5.1, статор двигателя имеет шесть пар выступающих полюсов. Каждые две катушки, расположенные на противоположных полюсах статора, образуют обмотку управления, включаемую, в сеть постоянного тока. Ротор - двухполюсный. Если подключить к источнику постоянного тока катушки полюсов 1 - 1', то ротор расположится вдоль этих полюсов. Если задействовать с помощью коммутатора катушки полюсов 2 - 2', а ка-тушки полюсов 1 - 1' обесточить, то ротор повернется и займет положение вдоль полю-сов 2 - 2'. Такой же поворот ротора произойдет, если включить в сеть катушки полюсов 3 - 3'. Так, шагами, ротор будет "следовать" за своей обмоткой управления.Ротор шагового двигателя занимает определенное фиксированное положение, соответствующее наибольшей магнитной проводимости относительно возбужденных статорных полюсов. Если отклонить ротор от этого равновесного положения на некоторый угол, то магнитная проводимость для потока уменьшится, силовые линии магн. поля деформируются, и возникнет синхронизирующий момент, возвращающий ротор в прежнее положение. Преимуществом шаговых двигателей является то, что в них совершенно отсутствует "самоход". Они поворачиваются и строго фиксируются с шагом, пропорциональ-ным числу полюсов на статоре. Это качество делает его незаменимым в особо точных механизмах (для привода часов, механизмов подачи ядерного топлива в реакторах, в станках с ЧПУ и т.д.).Управление шаговыми двиг. ведется с прим. различ. электронных устройств (триггеров Шмидта и др.). | 37.Конструкция двигателя постоянного тока. Назначение и исполнение отдельных элементов конструкции. ДПТ : неподвиж. статор. с полюсами + вращ. ротор (якорь) с коллектором. Статор – источник магн. поля и мех. остов машины, якорь- часть машины, в обмотке которой индуцируется ЭДС. Коллектор - для получ. на обмотке якоря эквивалентной выпрямленной ЭДС, кот. явл. источником пост. тока для внеш. цепи. Устройство статора: состоит из цилиндрической станины (корпуса), полюсов с обмоткой возбуждения и подшипниковых щитов. Станина - основа неподвиж. части машины, отливается или выполняется сварной из стали с большой магнитной проницаемостью, т.к. играет роль и магнитопровода. На внутр. стороне станины располаг. симметрично полюсы. В машинах малой и средней мощностей к цилиндрической танине с торцов крепятся подшипниковые щиты с подшипниками. В мощных машинах подшипники иногда выносятся на отдельные стояки.Основные полюсы с током в катушках обмотки создают в машине магнитное поле. Каждый полюс является электромагнитом, состоит из стального сердечника с полюсным наконечником (башмаком) и катушечной обмотки из изолированного медного провода. Обмотка основных полюсов составляет обмотку возбуждения машины.Добавочные полюсы устроены аналогично, но их сердечники чаще делаются из литой стали и имеют малую магнитную индукцию.Устройство якоря: Якорь (ротор) машины постоянного тока сост. из стального вала, стального сердечника, обмотки и коллектора.1. Сердечник якоря - цилиндрический барабан, в продольных наружных пазах которого размещается обмотка якоря. Для уменьшения потерь на вихревые токи (во время работы якорь вращается в постоянном и неподвижном магнитном поле статора) сердечник набирается из изолированных штампованных листов электротехнической стали. 2. Коллектор набирается из клинообраз. Сu пластин, которые изолируются друг от друга миканитом. В прорезь выступа коллекторной пластины впаиваются два конца соседних секций обмотки якоря.Современные машины имеют барабанный якорь с 2слойной обмоткой, которая по типу может быть петлевой (паралл), волновой (послед.) и комбинированной. 3. Обмотка якоря составляется из отдельных секций, концы которых припаиваются к пластинам коллектора. Секции имеют по два активных участка и могут состоять из 1, 2 или неск. витков. Секции обмотки укладываются в пазах барабана якоря в два слоя (один участок вверху одного паза, другой - внизу другого паза) и в опред. порядке, чтобы при вращ. якоря их участки всегда находились под разными полюсами статора (отстояли друг от друга примерно на одно полюсное деление т), т.е. чтобы индуцированные в них ЭДС действовали согласно и складывались. 1-станина | 46.Реверсивная схема управления пуском двигателя постоянного тока. |
studfiles.net
При вращении ротора магнитный поток полюсов пересекает статорную обмотку и наводит в ней ЭДС по закону электромагнитной индукции: E = 4,44*f*w*kw*Ф, где:
F – частота переменного тока, Гц; w – количество витков; kw – обмоточный коэффициент; Ф – магнитный поток.
Частота индуктированной ЭДС (напряжения, тока) синхронного генератора: f = p*n/60, где:
Р – число пар полюсов; п – скорость вращения ротора, об/мин.
Заменив: E = 4,44*(п*р/60)*w*kw*Ф и, определив: 4,44*(р/60)*w*kw – относится к конструкции машины и создаёт конструктивный коэффициент: C = 4.44*(р/60)*w*kw.
Тогда: Е = СЕ*п*Ф.
Таким образом, как и у любого генератора, основанного на законе электромагнитной индукции, индуктированная ЭДС пропорциональна магнитному потоку машины и скорости вращения ротора.
Принцип действия синхронного двигателя.
Принцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.
При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
Способы возбуждения синхронных машин.
Для питания обмотки возбуждения предусмотрено наличие возбудителя, в его качестве выступает генератор постоянного тока, якорь которого сопряжен с валом машины, посредством использования механического устройства.
По способу возбуждения синхронные машины подразделяются на два типа:
Возбуждение независимого вида.
Самовозбуждения.
При независимом возбуждении схема подразумевает наличие подвозбудителя, который питает: обмотку главного возбудителя, реостат для регулировки, устройства управления, регуляторы напряжения и т. д. Кроме этого способа, возбуждение может осуществляться от генератора, выполняющего вспомогательную функцию, он приводится в работу от двигателя синхронного или асинхронного типа.
Для самовозбуждения, питание обмотки происходит через выпрямитель, работающий на полупроводниках или ионного типа.
Для турбо- и гидрогенераторов используют тиристорные устройства возбуждения. Ток возбуждения регулируется в автоматическом режиме, при помощи регулятора возбуждения, для машин малой мощности характерно использование регулировочных реостатов, они включены в цепь обмотки возбуждения.
Преимущества и недостатки синхронного двигателя.
Синхронный двигатель имеет ряд преимуществ перед асинхронным:
1. Высокий коэффициент мощности cosФ=0,9.
Возможность использования синхронных двигателей на предприятиях для увеличения общего коэффициента мощности.
3. Высокий КПД он больше чем у асинхронного двигателя на (0,5-3%) это дастигается за счёт уменьшения потерь в меди и большого CosФ.
Обладает большой прочностью обусловленной увеличенным воздушным зазором.
Вращающий момент синхронного двигателя прямо пропорционален напряжению в первой степени. Т.е синхронный двигатель будет менее чувствителен к изменению величины напряжения сети.
Недостатки синхронного двигателя:
Сложность пусковой аппаратуры и большую стоимость.
Синхронные двигатели применяют для приведения в движение машин и механизмов, не нуждающихся в изменении частоты вращения, а так же для механизмов у которых с изменением нагрузки частота вращения остаётся постоянной: (насосы, компрессоры, вентиляторы.)
Пуск синхронного двигателя.
В виду отсутствия пускового момента в синхронном двигателе для пуска его используют следующие способы:
Пуск с помощью вспомогательного двигателя.
Асинхронный пуск двигателя.
Пуск с помощью вспомогательного двигателя.
Пуск в ход синхронного двигателя с помощью вспомогательного двигателя может быть произведен только без механической нагрузки на его валу, т.е. практически вхолостую. В этом случае на период пуска двигатель временно превращается в синхронный генератор, ротор которого приводится во вращение небольшим вспомогательным двигателем. Статор этого генератора включается параллельно в сеть с соблюдением всех необходимых условий этого соединения. После включения статора в сеть вспомогательный приводной двигатель механически отключается. Этот способ пуска сложен и имеет к тому же вспомогательный двигатель.
Асинхронный пуск двигателя.
Наиболее распространенным способом пуска синхронных двигателей является асинхронный пуск, при котором синхронный двигатель на время пуска превращается в асинхронный. Для возможности образования асинхронного пускового момента в пазах полюсных наконечников явнополюсного двигателя помещается пусковая короткозамкнутая обмотка. Эта обмотка состоит из латунных стержней, вставленных в пазы наконечников и соединяемых накоротко с обоих торцов медными кольцами.
При пуске в ход двигателя обмотка статора включается в сеть переменного тока. Обмотка возбуждения (3) на период пуска замыкается на некоторое сопротивление Rг, рис. 45, ключ К находится в положении 2, сопротивление Rг = (8-10)Rв. В начальный момент пуска при S=1, из-за большого числа витков обмотки возбуждения, вращающее магнитное поле статора наведет в обмотке возбуждения ЭДС Ев, которая может достигнуть весьма большого значения и если при пуске не включить обмотку возбуждения на сопротивление Rг произойдет пробой изоляции.

Рис. 45 Рис. 46.
Процесс пуска синхронного двигателя осуществляется в два этапа. При включении обмотки статора (1) в сеть в двигателе образуется вращающее поле, которое наведет в короткозамкнутой обмотке ротора (2) ЭДС. Под действием, которой будет протекать в стержнях ток. В результате взаимодействия вращающего магнитного поля с током в коротко замкнутой обмотке создается вращающий момент, как у асинхронного двигателя. За счет этого момента ротор разгоняется до скольжения близкого к нулю (S=0,05), рис. 46. На этом заканчивается первый этап.
Чтобы ротор двигателя втянулся в синхронизм, необходимо создать в нем магнитное поле включением в обмотку возбуждения (3) постоянного тока (переключив ключ К в положение 1). Так как ротор разогнан до скорости близкой
к синхронной, то относительная скорость поля статора и ротора небольшая. Полюса плавно будут находить друг на друга. И после ряда проскальзываний противоположные полюса притянутся, и ротор втянется в синхронизм. После чего ротор будет вращаться с синхронной скоростью, и частота вращения его будет постоянной, рис. 46. На этом заканчивается второй этап пуска.
28. Реакция якоря синхронного генератора при активной, индуктивной, ёмкостной и смешанной нагрузках.
Активная нагрузка (y1 = 0). На рис. 20.5, а представлены статор и ротор двухполюсного генератора. На статоре показана часть фазной обмотки. Ротор явнополюсный, вращается против движения часовой стрелки. В рассматриваемый момент времени ротор занимает вертикальное положение, что соответствует максимуму ЭДС Е0 в фазной обмотке. Так как ток при активной нагрузке совпадает по фазе с ЭДС, то указанное положение ротора соответствует также и максимуму тока. Изобразив линии магнитной индукции поля возбуждения (ротора) и линии магнитной индукции поля обмотки статора, видим, что МДС статора F1 направлена перпендикулярно МДС возбуждения Fв0. Этот вывод также подтверждается векторной диаграммой, построенной для этого же случая. Порядок построения этой диаграммы следующий: в соответствии с пространственным положением ротора генератоpa проводим вектор МДС возбуждения Fв0; под углом 90° к этому вектору в сторону отставания проводим вектор ЭДС Е0, наведенной магнитным полем возбуждения в обмотке статора; при подключении чисто активной нагрузки ток в обмотке статора I1 совпадает по фазе с ЭДС Е0, а поэтому вектор МДС F1, создаваемый этим током, сдвинут в пространстве относительно вектора Fв0 на 90°.

Рис. 20.5. Реакция якоря синхронного генератора при активной (а),
megaobuchalka.ru
Cтраница 1
Способность синхронных двигателей работать при опережающем токе является очень ценной и используется для повышения коэффициента мощности ( cos cp) отдельных потребителей и энергетических систем в целом. [2]
Способность синхронных двигателей работать при опережающем токе является очень ценной и используется для повышения коэффициента мощности ( cos p) отдельных потребителей и энергетических систем в целом. [4]
Как уже отмечалось ранее, наиболее полно синхронизирующую способность синхронных двигателей характеризует входной момент. [5]
Одним из преимуществ синхронного двигателя перед асинхронным является способность синхронного двигателя работать при заданном как отстающем, так и опережающем коэффициенте мощности. [6]
Преимущества синхронных двигателей, в силу которых их чаще применяют там, где раньше применяли асинхронные, следующие: способность синхронных двигателей компенсировать реактивную мощность с меньшими затратами, чем асинхронных в сочетании с конденсаторной батареей; повышение перегрузочной способности и устойчивости синхронных двигателей благодаря применению автоматического регулирования возбуждения ( АРВ) с форсировкой возбуждения при снижении напряжения в сети ниже 85 % t / ном; более высокий КПД, чем у асинхронных электродвигателей. [7]
Эффект от такого режима тем больший, чем больше величина реактивного сопротивления внешней сети. Способность синхронных двигателей регулировать напряжение основана на перераспределении или ограничении участка, на котором происходит периодическое перемещение реактивной мощности между приемником электрической энергии и синхронным двигателем так, что вся оставшаяся часть сети частично или полностью освобождается от реактивной мощности. В том случае, если синхронный двигатель устанавливается для целей регулирования напряжения, возможна его работа не только в режиме перевозбуждения, но и в режиме недовозбуж-дения. Работа в указанных режимах должна быть обоснована технико-экономическим расчетом. [8]
За рубежом в качестве электродвигателей иногда применяют реактивные синхронные двигатели. Преимущество их заключается в том, что они объединяют в себе простоту асинхронного электродвигателя и способность синхронного двигателя поддерживать постоянную частоту вращения при изменении нагрузки на валу. Момент выпадания из синхронизма для этих двигателей составляет 1 8 - 2 0 Мн. По принципу пуска реактивные двигатели аналогичны обычным ко-роткозамкнутым асинхронным двигателям, а по условиям обслуживания - асинхронным электродвигателям: последнее очень важно при эксплуатации оборудования в химически агрессивной среде, в которой работают машины для производства целлофановой пленки. [9]
Однако с энергетической точки зрения режим возбуждения имеет важное практическое значение. Так как синхронные двигатели обычно подключаются к сети, от которой питаются и другие потребители ( основную часть из которых составляют асинхронные двигатели, потребляющие ток, отстающий по фазе от напряжения сети), то способность синхронных двигателей работать с опережающими токами ведет к повышению коэффициента мощности ( cos ( p) энергетических систем. [10]
На электрических подстанциях, питающих синхронные электродвигатели, или, как говорят, в узлах с синхронной нагрузкой, имеется ряд специфических особенностей в выполнении устройств релейной защиты и противоаварийной автоматики. Это связано с особенностями поведения в аварийных режимах синхронной нагрузки по сравнению с другими типами нагрузки, например осветительной. Если при внезапном отключении питающего источника на подстанции с осветительной нагрузкой напряжение на шинах сразу становится равным нулю, то на подстанции с синхронной нагрузкой напряжение на шинах плавно снижается в течение нескольких секунд, пока вращаются по инерции синхронные электродвигатели, работающие в этот период как синхронные генераторы. Именно эта способность синхронного двигателя работать в определенных ситуациях в режиме, синхронного генератора вызывает необходимость выполнения важных дополнений и изменений в типовых устройствах релейной защиты и автоматики в тех случаях, когда на подстанции или в прилегающей электрической сети имеются относительно крупные синхронные двигатели. [11]
Страницы: 1
www.ngpedia.ru
Недостатки: в силу значительного потребления реактивной мощности в режиме малых нагрузок они обладают ограниченным использованием.
Синхронные более экономичны в потреблении энергии и более умтойчив в работе при колебаниях напряжения в сети.
Основной недостаток момент на валу равен 0 при пуске, отсюда следует необходимость в раскручивании до скорости приблеженной к синхронной.
Два пуска подряд из холодного. Один пуск из горячего.
Температурой возгарания горючего в-ва при которой выделяются горючие пары, и газы что после их воспламенения от источника, возникает устойчивое горение.
Температура вспышки - самая низкая температура горючего в-ва, при которой над его поверхностью обр. пары и газы, после их воспламенения, возгорание источника невозможно.
Концентрационными в пределах воспламенения, дисперсностью и летучестью.
B1- в нормальном режиме работы техн. об. выделяются взрывоопасные в-ва, и могут образовывать с воздухом взрывоопасные смеси.
B1A – взрывоопасные смеси возможны только в аварийных режимах.
B1б – взрывоопасные смеси только при авариях и неисправностях. Горючие газы обладают высоким нижним пределом концентрации воспламенения.
В1г – пространства у наружных установок.
ВII – расположены в помещениях, где выделяются переходящие во взвешенное состояние горючие пыли, способные образовывать горючие смеси с воздухом.
ВIIа – взрывоопасные смеси, образуются только в аварийных ситуациях.
Взрывозащищенное эл об это такое об, где предусмотрены конструктивные меры, по исключению или затруднению воспламенения окр взрывоопасной среды, данное об получает такой класс после проведения испытаний, вновь разрабатываемое об, которое должно поступить должно быть испытано и принимается на дальнейшее производство.
1ExdIIAt3 – знак уровня эл защиты оборудования (2,1,0)
- знак Ex указывает на соответствие эл об стандартам на взрывозащиту эл об.
-знак вида защиты взрывозащиты (d,p,I,q,a,s,e)
-знак группы или подгруппы эл об (II,IIa,IIb,IIc)
-знак температурного класса эл об (t1,t2,t3,t4,t5,t6)
Виды:
d – взрывонепроницаемая оболочка
p – заполнение или продувка оболочки под избыточным давлением защитным газом
i – искробезопасная эл цепь
q – кварцевое заполнение оболочки с токоведущими частями
o – масляное заполнение оболочки с токоведущими частями
s – специальный вид взрывозащиты
e – защита вида “e”
Потенциально опасные части - доступные прикосновению человека металлические нетоковедущие части электроустановок, между которыми (или между ними и землей) при нарушении изоляции токоведущих частей относительно земли может возникнуть напряжение, превышающее предельно допустимое для людей значение напряжения прикосновения.
К потенциально опасным частям электроустановок, на которых могут возникнуть опасные потенциалы, относятся:
1) металлические части электротехнического оборудования и изделий: корпуса электрических машин, аппаратов, светильников, распределительных устройств, станций управления, а также съемные и открывающиеся части, если на них установлено электрооборудование напряжением выше 42 В переменного тока или 110 В постоянного тока; оболочки и броня кабелей, проводов и шинопроводов, кабельные муфты, соединительные коробки и т.п.;
2) металлические опорные, ограждающие и другие конструкции, находящиеся в непосредственном соприкосновении с частями, указанными в п. 1: рамы электрических машин, основания комплектных устройств, станины станков, машин, механизмов, кабельные конструкции, лотки, короба, ответвительные коробки, металлорукава, струны, тросы, металлические трубы электропроводок и т.п.;
3) металлические строительные и стационарно установленные конструкции и оборудование, трубопроводы всех назначений, рельсы крановых и железнодорожных путей и т.п.
Все потенциально опасные части должны быть заземлены или занулены либо к ним должны быть применены другие меры защиты людей от поражения электрическим током при повреждении изоляции в соответствии с требованиями ПУЭ (гл.1.7).
Для защиты людей от поражения электрическим током наряду с основными защитными мерами (заземлением и занулением) применяют следующие меры: защитное отключение, малое напряжение, защитное разделение сети, двойную изоляцию, уравнивание потенциалов, выравнивание потенциалов.
studfiles.net
Cтраница 1
Синхронизированные асинхронные двигатели имеют коэффициент мощности, близкий к единице ( индуктивный или даже емкостный), но по другим показателям уступают синхронным двигателям. Кроме того, синхронизация асинхронных двигателей осуществима только для небольшой части установленных двигателей, и потому она только в редких случаях может существенно повысить коэффициент мощности электроустановки. [1]
Синхронизированный асинхронный двигатель с самовозбуж - - дением обладает высоким cos q и хорошими пусковыми характеристиками, но он уступает компенсированному двигателю в пе-регружаемости, не обладая никакими относительными преимуществами, помимо необходимого в некоторых случаях практики синхронного хода. Толькв в этих редких случаях он и может найти себе применение. [2]
Синхронизированный асинхронный двигатель представляет собой комбинацию синхронного и асинхронного двигателей. Благодаря этому он имеет хорошие пусковые свойства асинхронного двигателя и высокий коэффициент мощности синхронной машины. Конструктивно синхронизированный двигатель мало отличается от асинхронного двигателя с контактными кольцами. При пуске в ход переключатель ставят в положение 1, и двигатель приходит во вращение как асинхронный. При достижении скорости вращения, близкой к синхронной, переключатель переводят в положение 2, благодаря чему постоянный ток от возбудителя проходит по обмотке ротора и двигатель начинает работать синхронно. При больших перегрузках синхронизированный двигатель выходит из синхронизма, но продолжает работать как асинхронный, так как максимальный вращающий момент двигателя при его работе в асинхронном режиме больше максимального вращающего момента при работе в синхронном режиме. [3]
Применение синхронизированных асинхронных двигателей ( мощностью обычно не ниже 100 кет) допускается также в виде исключения на действующих предприятиях с плохим коэффициентом мощности и при загрузке двигателей не более 70 % их нормальной мощности. Синхронизированные асинхронные двигатели могут работать как в синхронном, так и в асинхронном режиме и дают возможность регулирования реактивной мощности. Существуют схемы с автоматической и ручной синхронизацией. [4]
В случае синхронизированного асинхронного двигателя, показанного на рис. 3 - 1, a, Yq Yd, если активным сопротивлением возбудителя или в соответствующих случаях - выпрямителя пренебрегают. [5]
Кроме того, в некоторых случаях применяются синхронизированные асинхронные двигатели. [6]
Абсолютно жесткую характеристику имеют только синхронные машины и синхронизированные асинхронные двигатели. Характеристику, приближающуюся к синхронной, могут иметь двигатели постоянного тока, даже при широком колебании питающего напряжения, при специальном исполнении обмотки возбуждения. Шунтовую характеристику имеют двигатели постоянного тока с независимым или же с параллельным возбуждением и асинхронные двигатели, сериесную - двигатели с последовательным возбуждением. [8]
Возбудители для синхронных двигателей ( к ним относятся и синхронизированные асинхронные двигатели), если во время пуска они заземлены или отключены от обмоток возбуждения. [9]
При оценке народнохозяйственного эффекта от создания и внедрения данного типа синхронизированного асинхронного двигателя следует исходить из условия, что двигатель янляется одним из элементов электрической системы, объединенных циклом производство - передача - распределение-потребление электроэнергии, получаемой из природных ресурсов. Именно при таком системном подходе к оценке целесообразности применения новой ресурсосберегающей техники внедрение в промышленность синхронизированных асинхронных двигателей, обладающих лучшими энергетическими характеристиками, оправдано не только технически, но и обеспечит значительный народнохозяйственный эффект. [10]
Вполне аналогичными по своим свойствам в отношении cos p являются синхронно-асинхронные, или синхронизированные асинхронные двигатели. Преимущества таких двигателей по сравнению с синхронными заключаются в легком пуске в ход с хорошим вращающим моментом и большой допустимой перегрузке; недостатком их является плохое использование обмоток ротора вследствие неравномерного распределения тока возбуждения ( постоянного) между обмотками отдельных фаз, а вследствие этого понижение мощности двигателя по сравнению с мощностью, развиваемой им при работе асинхронным двигателем. Другим недостатком синхронизированных асинхронных двигателей является по необходимости пониженное напряжение цепи возбуждения постоянного тока. Это напряжение поднять не представляется возможным, так как при разгоне двигателя в роторе двигателя получались бы слишком высокие напряжения, вызывающие необходимость усиления изоляции и удорожания обмотки ротора. Синхронизированные асинхронные двигатели так же, как и нормальные синхронные двигатели, могут быть использованы в качестве синхронных конденсаторов. Необходимость иметь особый возбудитель низкого напряжения усложняет и удорожает конструкцию синхронно - асинхронных двигателей, особенно при малых мощностях. [11]
Наиболее растростаненным способом компенсации реактивной энергии в электротехнических установках промышленных предприятий является применение перевозбужденных синхронных двигателей, синхронизированных асинхронных двигателей и статических конденсаторов. [12]
Для повышения коэффициента мощности до заданного значения могут быть применены следующие компенсирующие устройства: статические конденсаторы, синхронные двигатели, синхронные компенсаторы и в некоторых случаях, как исключение, синхронизированные асинхронные двигатели. [14]
Страницы: 1 2
www.ngpedia.ru
Cтраница 1
Использование синхронных двигателей в промышленности стало практически возможным только после создания простой схемы асинхронного пуска этих двигателей. Стержни пусковой обмотки расположены в пазах полюсных наконечников и соединены на торцах пластинками. [2]
Возможности использования синхронных двигателей для снижения колебаний напряжения в сети значительно уменьшаются при включении электродвигателей за реактором. Для обеспечения требуемого уровня напряжения на шинах подстанции в этом случае может оказаться необходимым поддерживать на зажимах электродвигателя напряжение, превышающее номинальное. [3]
При использовании синхронного двигателя повышается, точность подачи; если один двигатель приводит в движение два поршня ( рис. 65), то может быть достигнуто точное смешение двух жидкостей в определенной пропорции. Поскольку жидкость в поршневых насосах выталкивается из цилиндра за счет равномерного продвижения поршня, необходимо предотвратить утечку в вентилях или через прокладки. На этом рисунке можно видеть, как подача жидкости в систему происходит в точном соответствии с движением поршня. В насосе на давления до 1700 am, изображенном на рис. 67, поршень приводится в движение мотором мощностью 1 / 3 л. с. через редуктор с набором шестерен и цепную передачу. Возврат поршня и промывка цилиндров производится на больших скоростях мотора. [4]
При использовании асинхронных короткозамкнутых и синхронных двигателей необходимо проверять, возможен ли по условиям допустимого снижения напряжения их прямой пуск. Если прямой пуск сопровождается недопустимым снижением напряжения, то следует принимать меры к ограничению пусковых токов путем введения ограничивающих сопротивлений. При этом следует помнить, что момент двигателя при снижении няпряжения в период пустея ДП. [5]
При использовании асинхронных короткозамкнутых и синхронных двигателей необходимо проверять, возможен ли по условиям допустимого снижения напряжения их прямой пуск. [6]
При таком регулировании использование синхронного двигателя затруднительно вследствие сложности его запуска. Асинхронные двигатели применяют: короткозамкнутые, запускаемые с непосредственным включением в сеть или с переключением со звезды на треугольник, и с фазным ротором, запускаемые с последовательным выключением ступеней сопротивления. Выбор электродвигателя и способа его запуска производят в зависимости от мощности компрессора, мощности электрической сети и предполагаемой частоты включений. Частота включений определяется степенью снижения производительности и размерами установленного ресивера. Она оказывается наибольшей при работе на половинной производительности. [7]
Синхронно-следящие системы с использованием синхронных двигателей могут применять двигатели: 1) обычного исполнения с электромагнитным возбуждением; 2) гистерезисные; 3) реактивные и 4) двигатели с постоянными магнитами. [8]
При таком способе регулирования использование синхронного двигателя затруднительно вследствие сложности его пуска. Применяют асинхронные двигатели: короткозамкнутые, запускаемые с непосредственным включением в сеть или с переключением со звезды на треугольник, и с фазным ротором, запускаемые с последовательным выключением ступеней сопротивления. Выбор электродвигателя и способа его пуска производят в зависимости от мощности компрессора, мощности электрической сети и предполагаемой частоты включений. Частота включений определяется степенью снижения производительности компрессора и размерами установленного ресивера. Она оказывается наибольшей при работе на половинной производительности. [9]
Дальнейшим совершенствованием следящих систем описанного типа является использование синхронного двигателя, питаемого не от сети, а от предусмотренного в магнитофоне генератора. Схема сравнения реагирует на скорость вращения двигателя и при отклонении этой скорости от номинального значения изменяет частоту напряжения встроенного генератора, синхронно с которым вращается вал двигателя. Такие системы известны под названием систем с фазовой синхронизацией. Это наиболее дорогие устройства, но они обеспечивают наиболее высокую стабильность скорости движения ленты. [10]
В схеме предусмотрена возможность размагничивать муфту перед использованием синхронного двигателя насоса в режиме компенсатора. [11]
В последние годы электротехническая промышленность выпускает комплектные электроприводы с использованием синхронных двигателей, среди которых ЭПБ 2 по схеме вентильного двигателя, ЭПБ 3 и ЭПБ 3 - Б с использованием синхронных двигателей с постоянными магнитами. [12]
С учетом стоимости дополнительных устройств затраты на конденсаторы будут еще больше Зд, что указывает на целесообразность предусмотренного использования синхронных двигателей. [13]
Потери в сетях высокого и низкого напряжения промышленных предприятий и систем уменьшаются при установке дополнительных генераторов реактивной мощности, а также при использовании синхронных двигателей для выработки реактивной мощности. Дополнительными генераторами реактивной мощности могут быть синхронные компенсаторы или статические конденсаторы. [14]
Однако по мере усовершенствования механической части приводов, электросхем управления и распределения нагрузки, а также при создании надежных датчиков загрузки ленты, механизмов и двигателей перспективно использование синхронных двигателей и асинхронных с короткозамкну-тым ротором. [15]
Страницы: 1 2 3
www.ngpedia.ru
Для питания обмотки возбуждения предусмотрено наличие возбудителя, в его качестве выступает генератор постоянного тока, якорь которого сопряжен с валом машины, посредством использования механического устройства.
По способу возбуждения синхронные машины подразделяются на два типа:
Возбуждение независимого вида.
Самовозбуждения.
При независимом возбуждении схема подразумевает наличие подвозбудителя, который питает: обмотку главного возбудителя, реостат для регулировки, устройства управления, регуляторы напряжения и т. д. Кроме этого способа, возбуждение может осуществляться от генератора, выполняющего вспомогательную функцию, он приводится в работу от двигателя синхронного или асинхронного типа.
Для самовозбуждения, питание обмотки происходит через выпрямитель, работающий на полупроводниках или ионного типа.
Для турбо- и гидрогенераторов используют тиристорные устройства возбуждения. Ток возбуждения регулируется в автоматическом режиме, при помощи регулятора возбуждения, для машин малой мощности характерно использование регулировочных реостатов, они включены в цепь обмотки возбуждения.
Синхронный двигатель имеет ряд преимуществ перед асинхронным:
1. Высокий коэффициент мощности cosФ=0,9.
2. Возможность использования синхронных двигателей на предприятиях для увеличения общего коэффициента мощности.
3. Высокий КПД он больше чем у асинхронного двигателя на (0,5-3%) это дастигается за счёт уменьшения потерь в меди и большого CosФ.
4. Обладает большой прочностью обусловленной увеличенным воздушным зазором.
5ращающий момент синхронного двигателя прямо пропорционален напряжению в первой степени. Т.е синхронный двигатель будет менее чувствителен к изменению величины напряжения сети.
Недостатки синхронного двигателя:
1. Сложность пусковой аппаратуры и большую стоимость.
2. Синхронные двигатели применяют для приведения в движение машин и механизмов, не нуждающихся в изменении частоты вращения, а так же для механизмов у которых с изменением нагрузки частота вращения остаётся постоянной: (насосы, компрессоры, вентиляторы.)
Пуск синхронного двигателя.
В виду отсутствия пускового момента в синхронном двигателе для пуска его используют следующие способы:
1. Пуск с помощью вспомогательного двигателя.
2. Асинхронный пуск двигателя.
1. Пуск с помощью вспомогательного двигателя.
Пуск в ход синхронного двигателя с помощью вспомогательного двигателя может быть произведен только без механической нагрузки на его валу, т.е. практически вхолостую. В этом случае на период пуска двигатель временно превращается в синхронный генератор, ротор которого приводится во вращение небольшим вспомогательным двигателем. Статор этого генератора включается параллельно в сеть с соблюдением всех необходимых условий этого соединения. После включения статора в сеть вспомогательный приводной двигатель механически отключается. Этот способ пуска сложен и имеет к тому же вспомогательный двигатель.
Наиболее распространенным способом пуска синхронных двигателей является асинхронный пуск, при котором синхронный двигатель на время пуска превращается в асинхронный. Для возможности образования асинхронного пускового момента в пазах полюсных наконечников явнополюсного двигателя помещается пусковая короткозамкнутая обмотка. Эта обмотка состоит из латунных стержней, вставленных в пазы наконечников и соединяемых накоротко с обоих торцов медными кольцами.
При пуске в ход двигателя обмотка статора включается в сеть переменного тока. Обмотка возбуждения (3) на период пуска замыкается на некоторое сопротивление Rг, рис. 45, ключ К находится в положении 2, сопротивление Rг = (8-10)Rв. В начальный момент пуска при S=1, из-за большого числа витков обмотки возбуждения, вращающее магнитное поле статора наведет в обмотке возбуждения ЭДС Ев, которая может достигнуть весьма большого значения и если при пуске не включить обмотку возбуждения на сопротивление Rг произойдет пробой изоляции.

Рис. 45 Рис. 46.
Процесс пуска синхронного двигателя осуществляется в два этапа. При включении обмотки статора (1) в сеть в двигателе образуется вращающее поле, которое наведет в короткозамкнутой обмотке ротора (2) ЭДС. Под действием, которой будет протекать в стержнях ток. В результате взаимодействия вращающего магнитного поля с током в коротко замкнутой обмотке создается вращающий момент, как у асинхронного двигателя. За счет этого момента ротор разгоняется до скольжения близкого к нулю (S=0,05), рис. 46. На этом заканчивается первый этап.
Чтобы ротор двигателя втянулся в синхронизм, необходимо создать в нем магнитное поле включением в обмотку возбуждения (3) постоянного тока (переключив ключ К в положение 1). Так как ротор разогнан до скорости близкой
к синхронной, то относительная скорость поля статора и ротора небольшая. Полюса плавно будут находить друг на друга. И после ряда проскальзываний противоположные полюса притянутся, и ротор втянется в синхронизм. После чего ротор будет вращаться с синхронной скоростью, и частота вращения его будет постоянной, рис. 46. На этом заканчивается второй этап пуска.
studfiles.net

 Поскольку почти у всех двигателей вращающий момент прямо пропорционален току нагрузки М ~ Iн, то можно записать и выражение для эквивалентного вращающего момента:
Поскольку почти у всех двигателей вращающий момент прямо пропорционален току нагрузки М ~ Iн, то можно записать и выражение для эквивалентного вращающего момента: Учитывая, что мощность Р = М, электродвигатель можно выбирать также по эквивалентной мощности:
Учитывая, что мощность Р = М, электродвигатель можно выбирать также по эквивалентной мощности:
 П
П ри повторно-кратковременном режиме двигатель за период работы не успевает нагреться до установивш. температуры, а за время перерыва в работе не охлаждается до температуры окружающей среды (рис. 8.3.2 ).Для этого режима вводится понятие относительной продолж. включения (ПВ). Она равна отношению суммы рабочего времени ко времени цикла tц, со-стоящего из времени работы и времени паузы tо:
ри повторно-кратковременном режиме двигатель за период работы не успевает нагреться до установивш. температуры, а за время перерыва в работе не охлаждается до температуры окружающей среды (рис. 8.3.2 ).Для этого режима вводится понятие относительной продолж. включения (ПВ). Она равна отношению суммы рабочего времени ко времени цикла tц, со-стоящего из времени работы и времени паузы tо: Чем больше ПВ, тем меньше ном. мощность при, равных габаритах. След., двиг., рассчитанный на работу в течение 25% времени цикла при номинальной мощности, нельзя оставлять под нагрузкой 60% времени цикла при той же мощности. ЭД строятся для стандартных ПВ - 15, 25, 40, 60%, причем ПВ - 25%; принимается за ном. Двигатель рассчитывается на повторно кратковременный режим, если продолжительность цикла не превышает 10 мин. Если расчетные значения ПВ отличаются от стандартных, то при выборе мощности двигателя Рэ следует вносить поправку:
Чем больше ПВ, тем меньше ном. мощность при, равных габаритах. След., двиг., рассчитанный на работу в течение 25% времени цикла при номинальной мощности, нельзя оставлять под нагрузкой 60% времени цикла при той же мощности. ЭД строятся для стандартных ПВ - 15, 25, 40, 60%, причем ПВ - 25%; принимается за ном. Двигатель рассчитывается на повторно кратковременный режим, если продолжительность цикла не превышает 10 мин. Если расчетные значения ПВ отличаются от стандартных, то при выборе мощности двигателя Рэ следует вносить поправку: 

 . 2-полюсы с обмоткой возбуждения. Якорь состоит из: сердечника 3, обмотки 4, уложенной в пазы сердечника, коллектора 5.
. 2-полюсы с обмоткой возбуждения. Якорь состоит из: сердечника 3, обмотки 4, уложенной в пазы сердечника, коллектора 5.