Механизация и автоматизация сварочного производства осуществлена в основном за счет широкого применения электроприводов. Электроприводы в сварочной аппаратуре претерпели большие изменения. Вместо громоздких и дорогостоящих электроприводов систем «генератор — двигатель» появились новые, основанные на транзисторных и тиристорных регуляторах. В значительной степени этому способствовало производство электродвигателей постоянного тока серий КПА, КПК, специально разработанных для электросварочного оборудования. Использование интегральных микросхем в системах управления электроприводами повысило их надежность в работе, уменьшило габариты и стоимость, улучшило их ремонтоспособность.
Рассмотрим наладку тиристорных регуляторов, нашедших наиболее широкое применение в сварочной технике.
Электроприводы разделяют на нерегулируемые и регулируемые. Частота вращения электродвигателя нерегулируемого привода при неизменной нагрузке практически остается постоянной. В регулируемых приводах частоту вращения электродвигателя принудительно изменяют (регулируют) в соответствии с требованиями технологического процесса. Управление электроприводом заключается в выполнении отдельных или комплекса операций (пуск и торможение механизма, регулирование частоты вращения и т. д.). Управляют электроприводами с помощью так называемых систем управления.
В зависимости от сложности рабочего процесса системы управления должны выполнять определенные функции, по характеру которых их делят на ряд групп.
К первой группе относят простейшие системы управления, обеспечивающие пуск, остановку и реверсирование электродвигателей.
Вторая группа включает системы управления, осуществляющие поддержание частоты вращения или другой переменной с высокой точностью (например, скорости сварки). Эту функцию обычно выполняют с помощью замкнутых систем автоматического управления (САУ).
Третья группа содержит САУ, обеспечивающие слежение за вводимыми сигналами. Функцию слежения выполняют различного типа следящие системы (например, системы автоматического направления электрода по оси шва).
К четвертой группе относят САУ с программными устройствами (например, перемещение плазмотрона при вырезке заготовок сложной формы).
Пятая группа объединяет самонастраивающиеся САУ, шестая — представляет САУ, следящие за качеством получаемой продукции (например, сварного соединения) .
Электрические схемы простых САУ классифицируют по типу входящих в них электродвигателей. Типовые схемы управления короткозамкнутыми асинхронными электродвигателями обеспечивают подключение их к сети, отключение для остановки, реверсирование путем переключения двух фаз. Для управления этими электродвигателями чаще всего используют магнитные пускатели.
Типовые схемы управления электродвигателями постоянного тока выполняют функции включения, отключения, торможения, реверсирования, регулирования и стабилизации частоты вращения и др. Указанные операции обеспечивают САУ, в которых используют обратные связи. В САУ, как правило, применяют отрицательную обратную связь, ибо ее задача— уменьшить отклонение системы от заданного режима работы. В этой системе выходные регулируемые величины с помощью сравнивающих устройств воздействуют на входные. Такие САУ называют замкнутыми системами автоматического регулирования (САР).
Для регулирования частоты вращения электродвигателей постоянного тока применяют систему: тиристорный управляемый выпрямитель- двигатель (УВ—Д).
Остановимся на требованиях к электродвигателям, применяемым в электроприводах сварочных автоматов и полуавтоматов.
Напряжение питания должно быть не более 110 В постоянного и 42 В переменного токов. Установлен ряд мощностей, обеспечивающих необходимые усилия (100—250 Н) подачи электродных проволок: 40, 60, 90, 120, 180, 250 Вт. Продолжительность включения (ПВ) должна соответствовать для полуавтоматов 60% и автоматов 100 %. Диапазон изменения частоты вращения в относительных единицах должен быть не менее 10.
Ранее промышленность выпускала автоматы и полуавтоматы со ступенчатым регулированием скорости подачи электродной проволоки, в которых использовались асинхронные электродвигатели (например, АОЛ-12-4, АОЛ-12-2), но в настоящее время осуществлена их замена на аппараты с плавным регулированием на базе электродвигателей постоянного тока.
Для плавного регулирования частоты вращения наиболее удобны электродвигатели постоянного тока с независимым возбуждением. Регулирование частоты их вращения осуществляют изменением подводимого к якорю напряжения. В электросварочном оборудовании применяют специально разработанные электродвигатели постоянного тока с независимым возбуждением серий КПА и КПК.
В автоматах и полуавтоматах электроприводы по своему назначению делят на два типа: для управления скоростями подачи электродной проволоки, перемещения сварочной тележки и их стабилизации; для управления напряжением. на дуге и его стабилизации. Это электроприводы с зависимой от напряжения на дуге скоростью подачи электрода.
Оба электропривода представляют собой автоматические системы управления, причем первая является системой стабилизации, а вторая — следящей.
Наладка электропривода представляет собой комплекс работ, включающих различные проверки и испытания.
Наладку электропривода начинают с изучения его электрической схемы, включающего следующие вопросы:
- ознакомление с функцией электропривода в составе технологического оборудования;
- рассмотрение технологических требований к электроприводу;
- ознакомление с расположением механизма, пульта управления, шкафов, источника питания и т. п.;
- анализ работы электропривода по принципиальной электрической схеме, проверка соблюдения необходимой очередности в работе аппаратуры и отсутствие ложных и обходных цепей;
- проверка наличия необходимых защит и технологических блокировок;
- выявление ошибок в схеме; проверка правильности, выбора уставок защит и функциональных реле, пусковых и других резисторов;
- составление таблицы уставок защитных и функциональных реле;
- проверка соответствия примененной аппаратуры принятым значениям силового и оперативного напряжений;
- проверка монтажных схем панелей, шкафов, пультов и наличие маркировок в соответствии с принципиальной электрической схемой;
- составление таблицы всех внешних соединений электропривода.
Внешние связи проверяют по принципиальной электрической схеме, отмечая их на схеме цветным карандашом, что облегчает дальнейшую работу: составление полной схемы питания электропривода всеми видами напряжения от различных источников до каждого присоединения; составление списка вспомогательных электроприводов (систем вентиляции, смазки, гидравлики и т. п.), без которых не может быть осуществлена прокрутка налаживаемого электропривода. Выполнив первый пункт программы наладки, приступают к внешнему осмотру налаживаемого электропривода, определяя его техническое состояние. Обычно наладке электропривода предшествует его ремонт. Поэтому электропривод в наладку, как правило, поступает в исправном состоянии. Проверяют соответствие электропривода проекту и паспортизацию электрических машин, а также других элементов схемы.
Проверяют соответствие монтажа внутренних соединений панелей, пультов, шкафов принципиальной электрической схеме. Перед проверкой с целью исключения обходных путей отключают на блоках зажимов все внешние связи цепей вторичной коммуникации. Проверку проводят с помощью пробника. Проверяют все провода от контакта к контакту и до блока зажимов, при этом обязательно подсчитывают число проводов на каждом контакте с целью выявления лишних, не указанных на принципиальной электрической схеме. Обнаруженные лишние провода отключают с двух сторон. При проверке контролируют и корректируют маркировку цепей на принципиальной электрической схеме. В процессе проверки внутренних соединений контролируют работу замыкающих и размыкающих контактов реле и контакторов путем нажатия и отпускания их якорей, зачищают и регулируют контакты. Проверенные цепи отмечают цветным карандашом на принципиальной электрической схеме.
После проверки соответствия монтажа внешних соединений принципиальной электрической схеме измеряют и испытывают изоляцию силовых цепей и цепей вторичной коммутации. Причем полупроводниковые элементы, имеющиеся в схеме управления, с целью их сохранения от пробоя при измерениях и испытаниях закорачивают.
Затем настраивают защитные и функциональные реле,' измеряют сопротивления постоянному току реостатов и пускорегулирующих резисторов. Результаты измерений не должны отличаться от паспортных более чем на 10 %. Проверяют целостность всех отпаек.
Убедившись в исправности элементов заземляющих устройств, приступают к проверке работы релейно-контакторных схем под напряжением. Проверку осуществляют при обесточенных силовых цепях после предварительного определения полярности оперативного напряжения. Каждую цепь схемы проверяют отдельно. Замыкание и размыкание контактов контакторов в силовых цепях контролируют пробником. Функционирование релейно-контакторных схем проверяют при номинальном и 0,9 номинального напряжения оперативных цепей.
Проверяют и испытывают электрические машины, входящие в состав электропривода (см. гл. 2, п. 4).
Опробуют работу электропривода с ненагруженным механизмом или на холостом ходу электродвигателя. Опробование производит обученный эксплуатационный персонал под ру- 66ководством наладчиков при наличии разрешения на прокрутку от службы эксплуатации, если выполнены все мероприятия по технике безопасности. Как правило, на практике считают нецелесообразным отсоединять электродвигатель от механизма. Для электроприводов, имеющих ограниченное перемещение (например, механизм подъема сварочной головки), механизм устанавливают в среднее положение и выставляют путевые и конечные выключатели.
Должна быть соблюдена определенная последовательность прокрутки электропривода. Сначала производят кратковременный толчок электропривода. При этом проверяют направление вращения, нормальную работу электродвигателя и механизма. Если электропривод нерегулируемый, то производят пуск до номинальной частоты вращения электродвигателя. При остановке асинхронных электроприводов проверяют и подстраивают динамическое торможение и действие тормозов. Дополнительно проверяют состояние подшипников. Контролируют нагрев электродвигателя. Настраивают режимы пуска и реверса. Для регулируемых систем проверяют частоту вращения электродвигателя при различных положениях регулятора и сравнивают ее с паспортной.
Затем приступают к проверке работы электропривода под нагрузкой. Проверку осуществляют в режимах технологических операций. Заканчивают наладку электропривода сдачей его в эксплуатацию. Сдачу оформляют актом или записью в специальном журнале. При этом эксплуатационному персоналу передают протоколы измерения и испытания изоляции, проверки элементов и цепей заземления, вносят изменения в комплект схем, произведенные в процессе наладки.
Рассмотрим работу и наладку некоторых типов схем управления регулируемых электроприводов, используемых в сварочных устройствах.
studfiles.net
ЭЛЕКТРОПРИВОДА МЕТАЛЛОРЕЖУЩИХ СТАНКОВ
Как правило, при эксплуатации наладочные работы не требуются. Но такая необходимость может возникнуть при длительном хранении; повреждениях при транспортировке; частичной раскомплектации привода или после ремонта. Частичная наладка соответствует дефекту, причина которого известна и устранение его не требует большой затраты труда. Для наладочных работ необходимо иметь секундомер, переносные электроизмерительные приборы для измерения тока, напряжения и мощности, частотомер, магазин сопротивлений, тахометр, токоизмерительные устройства, набор ручного электромонтажного инструмента с изолирующими ручками, прибор для контроля целости электрических цепей, мегомметр и осциллограф.
Наладка электрических цепей. Перед наладкой надо ознакомиться с документацией, изучение которой начинают с функциональных и структурных схем. Затем изучают принципиальную схему электропривода, его работу по блокам. Для облегчения понимания схемы используют диаграммы импульсов тока или напряжения. Следует ознакомиться со схемами соединений, выяснить режимы работы оборудования. Проверку правильности монтажа электрических цепей можно осуществить одним из следующих способов. При визуальном методе определяют соответствие монтажа документации, внешнее состояние контактных соединений, расстояние между токоведущими частями. При проверке электрических цепей применяют известный метод «прозвонки».
Метод измерения токов и напряжений основан на том, что проверяется определенное распределение токов в цепях или напряжений на их отдельных участках. При испытании необходимо принять меры, чтобы измерительное напряжение не было подано на вторичные обмотки трансформаторов. Способ определения полярности цепи заключается в нахождении полярностей на участках цепей, связанных электрически, при подаче на них постоянного напряжения, а для магнитосвязанных цепей — при подаче импульсов.
Для определения начал или концов обмоток трехфазного двигателя две обмотки соединяют последовательно, а к третьей подводят напряжение. Если первая и вторая обмотки соединены одно'йменными выводами, напряжение между свободными выводами будет равно нулю и лампа при подключении к этим выводам гореть не будет. Если эти обмотки соединены не одноименными выводами, напряжение между свободными выводами будет примерно в 2 раза больше напряжения, подведенного к третьей обмотке. Рекомендуется при данной проверке пользоваться источником пониженного напряжения, а в качестве индикатора напряжения использовать вольтметры.
При осмотре электронных элементов обращают внимание на состояние выводов, особенно в месте их выхода из соответствующего прибора. Для полупроводниковых приборов, особенно мощных, проверяют условия их охлаждения. При проверке состояния изоляции элементы, не рассчитанные на то испытательное напряжение, которое предполагается приложить к проверяемому электроприводу при данной схеме испытания, должны быть отсоединены или закорочены (зашунтированы выводы этих элементов). Особенно надо обращать внимание на полупроводниковые приборы и электрические конденсаторы.
Для конденсаторов характерно большое сопротивление (стрелка прибора установится около деления «бесконечность»). При проверке конденсаторов большой емкости (1 мкФ и более) прибор в первый момент может показать небольшое сопротивление, но по мере зарядки конденсатора сопротивление, показываемое прибором, будет увеличиваться и, наконец, достигнет очень большой величины. При проверке электролитических конденсаторов прибор следует включить, соблюдая полярность выводов конденсатора.
Если нет специального прибора для испытания транзисторов, то подключают один зажим омметра к базе транзистора, а другой— поочередно к эмиттеру и коллектору. Если к базе исправного р-п-р транзистора подключен положительный полюс омметра, при обоих измерениях сопротивление будет около 0,1—5 мОм (в зависимости от типа транзистора). При этом обратное сопротивление эмиттерного перехода обычно бывает больше, чем коллекторного. При изменении полярности оба измерения дадут сопротивление порядка нескольких единиц или десятков ом.
Подключая положительный полюс омметра к эмиттеру, а отрицательный— к коллектору, при исправном транзисторе получают сопротивление 10 мОм. При перемене полярности прибор покажет большое сопротивление. По результатам таких измерений можно установить, какой из электродов является эмиттером, а какой коллектором.
Основным условием правильной работы тиристоров выпрямителя является обеспечение строгой последовательности и расположения во времени импульсов на соответствующих управляющих электродах (фазировка). С этой целью производится фазировка системы управления. Рассмотрим процесс фазировки на примере трехфазной мостовой схемы выпрямления. В этой схеме одновременно работают два тиристора. Поэтому блоки управления
|
|
|
|
| Рис. 84. Временные диаграммы чередования фаз и управляющих импульсов, полученные при помощи однолучевого осциллографа |
|
|
БУ1...БУ6 соединяются по два и каждая пара питается от одной фазы вторичной обмотки силового трансформатора TV, (рис. 84, а).
|
|
| Рис. 85. Временные диаграммы чередования фаз и управляющих импульсов, полученные при помощи двухліучевого осциллографа |
|
|
| Экран осци - Сеть (луч 1) |
|
|
Фазировка производится с помощью одно - или двухлучевого электронного осциллографа. Рассмотрим фазировку при помощи однолучевого осциллографа типов ЭО-7, С1-19. Его горизонтальную развертку регулируют так, чтобы на экране была видна синусоида напряжения и2ф в удобном для наблюдения масштабе (рис. 84, б). После этого надо зарисовать на миллиметровую бумагу кривые фазных напряжений, подаваемых на аноды (катоды) тиристоров VI—V3—V5 (V4—V2—V6), и отметить на оси времени (рис. 84, в) начала и концы положительных полуперио - дов напряжений U2a, и%ъ и U2c, последовательность фаз которых должна соответствовать чередованию А—В—С.
Далее следует отключить силовой трансформатор и включить питание системы управления (СУ). Поочередно присоединяя к выходу СУ осциллограф, необходимо убедиться в том, что каждая пара отпирающих импульсов на тиристорах катодной (VI—■ V3—V5) и анодной (V2—V4—V6) групп сдвинута между собой на 120° и имеет такой же порядок чередования, как и напряжения и2а, U2b, U2c (пары тиристоров VI и V4, V3 и V2, V5 и V6). Затем производят начальную установку отпирающих импульсов со сдвигом на 90° относительно точек а, б, в,... естественного открывания тиристоров. Если это не удается сделать, надо пересо - единить первичные обмотки трансформаторов формирования импульсов. Точная установка начального угла отпирания тиристоров а = 90° производится для каждого тиристора изменением напряжения смещения, подаваемого на базу входного транзистора VT1 (см. рис. 21) при помощи резистора RCK. Правильная фазировка и установка угла зажигания контролируется наличием ■симметричности в форме тока якоря двигателя.
Если имеется двухлучевой осциллограф, то фазировка тиристоров, например, для трехфазной нулевой схемы производится следующим образом. На луч 1 (рис. 85) подается анодное напряжение, на луч 2 — управляющее. Расположение управляющего импульса на втором тиристоре показано на рис. 85, б.
Аналогичные операции производятся на всех шести тиристорах. Если управляющий импульс расположен неправильно, ме - гняют местами фазы сетевого напряжения (на высокой сторонесилового трансформатора) до получения требуемого расположения импульсов. При фазировке тиристорных преобразователей необходимо строго соблюдать правила техники безопасности. Это связано с наличием как у однолучевых, так и у двухлучевых осциллографов общей точки «Земля», которая соединена с корпусом прибора. Для изоляции цепей силовой части от цепей управления надо применять разделительный трансформатор. При этом на осциллограф подается сигнал с его вторичной обмотки. Необходимо также обратить внимание на соблюдение прямого чередования фаз сетевого напряжения, подаваемого на преобразователь. Для этого можно применить фазоуказатель или при помощи осциллографа добиться правильного включения фаз сетевого напряжения.
Порядок наладки приводов серий ПМУ и ПМУ-М. 1. Собрать привод по схеме. Включить амперметр в цепь якоря и подключить вольтметр к якорю и к обмотке возбуждения двигателя. Проверить монтаж с помощью омметра. В дальнейшем перед каждым пуском во избежание повреждения амперметра шунтировать его на время разгона двигателя.
2. Ручку задатчика повернуть влево до упора. Движок задатчика должен оказаться в точке 13 схемы (см. рис. 32). На привод желательно подать 50—60% номинального сетевого напряжения. Нагрузить двигатель так, чтобы ток якоря составил 20— 30% номинального (для данного типа привода). Двигатель должен начать вращаться, вольтметр возбуждения должен показывать напряжение 40—60% номинального, вольтметр якоря — от нескольких вольт до нескольких десятков вольт. Поворачивая ручку задатчика вправо, следует убедиться в том, что напряжение на якоре и скорость вращения двигателя растут, а напряжение возбуждения не изменяется.
3. Подать на привод полное сетевое напряжение. Постепенно увеличивая ток нагрузки, проверить, не возникают ли автоколебания скорости и соответственно' тока и напряжения в цепи якоря. Если автоколебания возникают, убрать их, уменьшив величину сопротивления резистора R5 перемещением регулировочного хомутика. Если автоколебаний нет, но скорость сильно снижается при увеличении нагрузки, увеличить сопротивление резистора R5.
4. При номинальном напряжении сети и номинальной нагрузке установить при помощи резистора R3 напряжение возбуждения двигателя равным 90% номинального. При помощи резистора R1 предварительно установить нижний предел регулирования скорости, а при помощи R2 — верхний.
5. В приводах серии ПМУ-М установить величину тока смещения. Для этого установить такую величину сопротивления резистора R4, чтобы при отсоединении провода, ведущего от движка задатчика к блоку питания (точка 25 схемы), частота вращения двигателя, нагруженного током 25% номинального, не превышала 15% номинальной частоты.
6. Постепенно увеличивая сопротивление резистора R5, добиться, чтобы при изменении нагрузки от 25 до 100% номинальной перепад частоты при любом положении движка задатчика не превышал величины, указанной в паспорте. Затем уточнить сопротивление резистора R1.
Изменяя напряжение питания в пределах от 85 до 105% номинального, проверить, чтобы в любом допустимом режиме по частоте вращения и нагрузке не возникало значительных незатухающих колебаний или неравномерного вращения вала двигателя. Если колебания обнаруживаются, то следует уменьшить величину R5, вновь уточнить величину R1 и повторно проверить привод на отсутствие автоколебаний. После окончательной установки сопротивлений резисторов R5 и R1 уточнить величину R2.
Порядок наладки приводов серии ПМУ-П.
1. Проворачивая от руки вал двигателя в заданном направлении вращения, определить с помощью вольтметра полярность на зажимах тахогенератора (см. рис. 33).
2. Собрать привод по схеме. Включить амперметр в цепь якоря и подключить вольтметры к обмотке возбуждения и к якорю двигателя.
3. Отвернуть винты и снять крышку коробки полупроводниковых блочков. Отключить блок промежуточного усилителя (ПУ).
4. Зашунтировать амперметр в цепи якоря, подать на блок питания сетевое напряжение. При небольшой нагрузке двигатель должен вращаться с малой скоростью или вообще не вращаться. Провести предварительную настройку смещения, для чего перемещением регулировочного хомутика на резисторе R7 (индексы элементов заимствованы из заводской документации, которая в книге не приводится) добиться, чтобы при указанной выше нагрузке двигатель вращался, с частотой 1—2 об/мин. Отключить привод от сети.
5. Повернуть ручку потенциометра задатчика до упора влево. Поставить на место блок промежуточного усилителя и зафиксировать замок штепсельного соединения. Подать на привод напряжение сети. Двигатель должен остаться неподвижным либо начать вращение с малой скоростью. При повороте движков задатчика вправо скорость двигателя должна увеличиться.
6. Снять шунт с амперметра (не отключая привод от сети). Увеличивая нагрузку на двигатель до полной остановки, определить ток якоря, на который настроена цепь токоограничения (ток отсечки). С помощью переменных резисторов наладить цепь на ток отсечки в пределах 2—2,2 номинального тока якоря. В дальнейшем шунтировать амперметр при пусках двигателя не требуется.
7. При помощи переменного резистора установить на обмотке возбуждения напряжение, равное 90% номинального.
8. При помощи переменных резисторов добиться, чтобы изменение частоты вращения при изменении нагрузки и напряжения сети соответствовали значениям, приведенным в паспорте.
| 9. НАЗНАЧЕНИЕ РЕГУЛИРОВОЧНЫХ РЕЗИСТОРОВ ПРИВОДОВ СЕРИЙ ПМУ, ПМУ-М И ПМУ-П
|
9. При помощи переменных резисторов вызвать автоколебания и затем снизить их амплитуду до 5% установленной частоты вращения. Перед наладкой узла гибкой обратной связи необходимо проверить его фазировку. Для этого, установив частоту вращения равной 1% от номинальной, разорвать цепочку гибкой обратной связи. Амплитуда колебаний частоты вращения должна вырасти, а частота снизиться. Затем цепь гибкой обратной связи должна быть восстановлена.
10. После настройки цепочки гибкой обратной связи вновь провести операцию 8, а затем 9 (без проверки фазировки связи).
В табл. 9 указано назначение регулировочных резисторов Приводов серий ПМУ, ПМУ-М, ПМУ-П и их влияние на наладку. Для приводов серии ПМУ-П особое внимание следует обратить на полярность подсоединения тахогенератора, так как при неправильной полярности отрицательная связь по скорости становится положительной и после пуска двигатель разгоняется до максимальной скорости вращения независимо от положения задающего потенциометра. При этом на вход полупроводникового усилителя подается высокое напряжение, а по цепи тахогенератора проходит ток больше допустимого, что может вывести из строя обмотку якоря тахогенератора.
Если на схеме не указаны точки подсоединения тахогенератора, то правильную полярность можно определить путем пробного включения. Включив в цепь якоря электродвигателя резистор величиной 10-^20 Ом, следует пустить привод на минимальную частоту вращения. Если двигатель заметно разгоняется, следует переменить полярность подключения тахогенератора. Г Периодические колебания частоты вращения электродвигателя в приводах серий ПМУ и ПМУ-М свидетельствуют о том, что с®противление резистора R5 велико (положительная обратная связь по току велика). Автоколебания могут возникнуть и от других причин, например от замыкания пружины ползунка потенциометра на корпус (в приводах ПМУ, ПМУ-М), большого зазора в сочленении вала двигателя и тахогенератора в приводах ПМУ-П и т. д.
Длительная перегрузка привода может привести к перегреву блока питания (силовых обмоток магнитных усилителей, селеновых выпрямителей) и электродвигателя, что приводит к ухудшению механических и электрических свойств изоляции, возникновению короткозамкнутых витков в обмотках усилителей и якоря и выходу их из строя.
Селеновые выпрямители допускают температуру нагрева 75°С, превышение которой влечет за собой выход их из строя. Перегрузка электродвигателя приводит к перегреву и выходу из строя его коллектора. Во избежание выхода из строя электродвигателя ограничивается и частота пусков. Так, для приводов, не имеющих узла токоограничения, допустимая частота включений не должна превышать двух—трех за 1 ч; при наличии узла токоограничения— не более 100 пусков за 1 ч. Превышение указанной частоты включений приводит в конечном счете к выходу из строя электродвигателя.
Блок питания привода должен быть защищен от коротких замыканий. Следует учесть, что неодинаковое напряжение на фазах также может отрицательно повлиять на работу привода (например, несоответствие минимальной и максимальной частот вращения паспортным и т. д.). Но такие режимы не являются типовыми,, так как допустимое отклонение напряжения в фазах не должно превышать 2%. После восстановления равенства напряжений фаз привод будет работать нормально.
Наладка электропривода серии ЭТ6.
До наладки (см. рис. 41,6) необходимо установить три автоматических выключателя. Один устанавливается на первичной стороне силового трансформатора, два — на вторичной стороне. Хотя в схеме привода предусмотрена защита, исключающая включение преобразователя при неправильной фазировке, однако в виду того, что эта защита может быть не отлажена, целесообразно фазировку провести. Для этого надо распаять перемычку в т. 19 (см. рис. 41, г) и закоротить ее на 0. Это обеспечит нулевое значение напряжения на входе СИФУ. После этого подать на входы двухлучевого осциллографа импульс управления одного из тиристоров катодной группы. Не выключая автоматы, подать на второй вход анодное напряжение (точка 01 и фазы А1, Bl, Cl, XI, Yl, Z1) на клеммы силового трансформатора. Методом перебора отыскать такую фазу, относительно которой импульс будет отставать на 150—170 эл. градусов. Зафиксировать результат. Аналогичную проверку произвести для всех тиристоров катодной группы. Если
заводской монтаж сделан правильно, фазировку тиристоров анодной группы можно не делать.
Проверка работоспособности системы управления. Включить автомат. Для исключения возможности пропадания импульсов управления при работе на максимальных частотах вращения надо подать на осциллограф сигнал с точек 0, 137 (указанные индексы имеются в сопроводительной документации на электропривод). С помощью сопротивлений в цепях пилообразных напряжений R101, (Rill, R121, R131, R141, R151) обеспечить равенство их амплитуд пульсирующего тока на выходе шестифазного мостового выпрямителя.
Для определения состояния усилителей регуляторов установить задатчик скорости на точки 0 и 91. Подать ступенчатый за» дающий сигнал напряжением 2 В и, изменив полярность сигнала, проконтролировать величину и изменение полярности сигнала на выходе регулятора скорости (точка 100) и регулятора тока (точка 19). Величина выходных сигналов должна быть не менее 12 В.
Для установки минимального угла зажигания надо соединить вход осциллографа с точками 0, 5 (выход нуль-органа). Подать задающий сигнал 2 В и с помощью резисторов R344 (R336) установить длительность узкой части двухполярного выходного сигнала прямоугольной формы на микросхеме А101 равной 1—
1,5 мс. Аналогичную операцию произвести с микросхемами А121, А131, А141, А151, А161.
Для настройки датчика тока добавить в трансформатор тока второй виток и при включенном автомате установить с помощью1 резистора R403 напряжение в точке 120 0,25 В. Для предварительной настройки узла токоограничения установить задатчик скорости в положение п = 0. С помощью резистора R354 установить в точке 135N (139N) напряжение 2 В.
Контроль работоспособности силовой части. Установить управляющий сигнал на СИФУ равным нулю. Отключить одну группу тиристоров (точка 51 или 50), включить импульсы управления1 тиристорами и, плавно меняя задающее напряжение, пройти весь диапазон частоты вращения. С помощью осциллографа контролируется форма тока якоря двигателя. Сигнал снимается с шунта. На холостом ходу ток должен иметь прерывистый характер и иметь шесть пульсаций на период. Наряду с этим оценивается уровень искрения под щетками двигателя. При номинальной частоте вращения двигателя замерить напряжение на его якоре и тахогенераторе, который имеет коэффициент передачи 30 В при 1000 об/мин. Аналогичные испытания провести с другой группой тиристоров.
Если отклонений нет, включить обе группы тиристоров. Вновь проконтролировать ток в цепи якоря. Если нужно, с помощью регулировки R101...R151 и увеличения С101...С151 до 0,1 мкФ выровнять высоту пульсаций тока в цепи якоря. Пройти весь диапазон частоты, контролируя поведение двигателя.
Настройка регуляторов. Убедиться в правильности присоединения проводов от тахогенератора и полярности сигнала обрат - нЬй связи току. Подать сигнал от задатчика на вход СИФУ и загрузить двигатель до номинального значения тока в цепи якоря. При совпадении знака сигнала по току с выходным напряжением усилителя скоростного контура следует изменить полярность сигнала, поступающего от датчика тока.
Расчет параметров регуляторов тока и скорости. Расчет параметров ПИ регулятора тока Срт (С313), Rpr (R323) и ПИ регулятора контура скорости производится следующим образом. Зададимся величиной коэффициента К трансформатора тока, равной 0,1, что соответствует двум виткам в датчике тока и величине R408= 120 кОм. Затем по формулам, указанным в паспорте электропривода, рассчитывают Срт и RVT. Запаять эти элементы в соответствии с расчетом.
Плавно разгоняя привод, с помощью R302 устанавливается требуемая зависимость между напряжением задания и частотой вращения двигателя (например, U3ад=Ю В; /гЯв=Ю00 об/мин). Установив осциллограф на якорь тахогенератора (точки 0 и 90N) задать І/зад= 1 В (а= 100 об/мин), после чего ступенчато изменяя Uзад, контролировать вид переходного процесса. (
Отладка токоограничения привода. Включив автомат, установить с помощью R354 в точках 135N (139N) напряжение отсечки U0 по току при пуске, равное U0= (3—4) /НОм - Включив автоматы АВ2 и АВЗ и плавно разгоняя привод с помощью R306, добиться, чтобы, начиная с « = 300 об/мин, начало уменьшаться напряжение Ui35jv - Задавая ступенчатые сигналы, соответствующие максимальной частоте, оценить уровень пускового тока в конце разгона и сравнить с величиной, допустимой для двигателя. Наряду с этим контролировать уровень искрения под щетками двигателя при пусках и реверсах.
Наладка электроприводов серии БУ3609.
После проверки наличия напряжения на обмотке возбуждения двигателя приступаем к контролю работы системы регулирования (СР). Для этого необходимо удалить плавкие вставки предохранителей FI, F2, F4, F5 и установить F3 (см. рис. 43, б). Включить сеть. Проверить напряжение в контрольных точках. Установить задающий потенциометр в нулевое положение. Включить устройство выбора направления в положение Н и выставить потенциометром напряжение —10 В на потенциометре задания частоты вращения. Переключить выбор направления в положение В и установить на задатчике +J0 В. При этом напряжение в контрольной точке 15 относительно общей точки должно быть не более ±0,1 В. Далее производим проверку ограничения углов регулирования: максимальный угол не должен превышать 165°, минимальный — 45°. Подгонку углов производим при помощи потенциометров, предусмотренных схемой. Проверяем наличие импульсов на одном комплекте тиристоров. При этом на другом комплекте они должны отсутствовать. Приступаем к проверке работы системы управления в замкнутой системе электропривода. Для этого установить предохранители F1 и F2. Включаем сеть. Установить устройство выбора направления в положение В или Н. При этом двигатель не должен вращаться. При помощи регулировочных потенциометров и изменения зазора дросселя добиться непрерывной формы тока в цепи якоря. Установить ток отсечки на уровне 2/н. Зашунтиро - вать такое число диодов в нелинейном звене, чтобы имел место минимальный угол поворота вала двигателя. Проверить наличие реверса при 1/3 номинальной частоты вращения. Если колебательный процесс имеет более двух—трех колебаний, надо точнее подобрать параметры цепей коррекции. Установить номинальную частоту вращения и проверить отсутствие значительных ее колебаний во всем диапазоне регулирования. В случае их наличия устранить при помощи регулировочных резисторов R12 и R30.
Наладка электропривода серии ЭТУ 3601.
Задаваясь быстродействием электропривода, по методике, имеющейся в сопроводительной документации, производим расчет параметров корректирующих цепей регуляторов скорости и тока. Аналогично рассчитывают и выбирают параметры подстроечных элементов узла защиты. Затем производят настройку узла зависимого токоограничения, исходя из допустимой пусковой токовой диаграммы двигателя. При этом производится расчет и установка подстроечных резисторов по методике, изложенной в техдокументации. Способы фазировки сетевого напряжения, проверки правильности присоединения выводов тахогенератора, настройки системы фазового управления и логических схем раздельного управления, ограни-■ чения выходного напряжения регуляторов принципиально ничем не отличаются от других систем тиристорных электроприводов, описываемых ниже.
Наладка электропривода серии ЭТЗИ.
Перед наладкой и контролем узлов привода необходимо отключить один из уравнительных реакторов. По свечению сигнальной лампочки убедиться в правильности фазировки сетевого напряжения. Напряжение на выходе усилителя проверяют по вольтметру. При изменении частоты вращения от нуля до номинальной вольтметр должен изменять свои показания от 0 до 3—4 В в обе стороны.
Балансировка усилителя регулятора скорости производится путем установки перемычки в точках 131, 14 (см. рис. 40,6). Поворотом ползунка R51 добиваются нулевого показания на вольтметре, присоединенном к выходу усилителя. Если баланс не устанавливается, необходимо проверить наличие балансировки первого каскада усилителя. В зависимости от результатов контроля надо заменить один из ОУ.
Регулировку узла токоограничения приводят следующим образом: отключить сетевое напряжение и присоединить вольтметр к точкам 112, 14. Включить сетевое напряжение и задатчиком скорости установить максимальную частоту вращения. Если показания вольтметра больше или равны выходному напряжению усилителя, надо изменить величину R55 так, чтобы напряжение было меньше выходного на 10%. Для проверки величины тока сітсечки надо установить л =10 об/мин и застопорить двигатель. При этом ток в цепи якоря не должен превышать 3—4 /н. Можно также применять способ отключения обмотки возбуждения двигателя. После включения сети ток якоря не должен превышать указанного значения.
Наладку блока управления тиристорами производят при вынутой плате блока усилителя. Провода вспомогательной батарейки типа Крона присоединяют к точке 14 и к контакту 22 свобод* ного разъема блока усилителя. Включают сетевое напряжение и с помощью вспомогательного потенциометра увеличивают напряжение от 0 до 4 В. При этом частота вращения должна иметь максимальное значение. Повторяют это при вращении в противоположную сторону путем изменения полярности батарейки. Если частота вращения не максимальна, необходимо произвести подрегулировку резисторами R19, R29 и R39.
При смене типа двигателя выходное напряжение усилителя может оказаться недостаточным или избыточным. Для приведения его в соответствие надо изменить величину резисторов R59 й R62. Для установки максимальной частоты предусмотрен переменный резистор R54.
Наладка электропривода серии ЭТА
После распаковки и монтажа готового привода вынуть платы ПУ и ПИ. Соединить точки 131 и 14 с напряжением вспомогательного реверсивного задатчика, питаемого от батарейки типа Крона. Отключить цепь 49. Включить привод и установить правильное чередование сетевых фаз. При правильном чередовании фаз и правильном включении тахогенератора частота вращения будет увеличиваться вместе с ростом задающего напряжения. Включить цепь 59 и проверить работу привода в обоих направлениях вращения двигателя. Проверить балансировку усилителя скоростного контура. Вставить платы ПУ и ПИ и включить сетевое напряжение. Вал двигателя должен находиться в одном положении и при приложении момента (в обе стороны) в пределах номинального тока якоря угол отклонения вала от исходного положения не должен превышать 2—3°. Подать на вход преобразователя задающие импульсы и проверить работу привода в режиме позиционирования и слежения в обе стороны вращения вала двигателя.
Из-за неточной настройки регулировочных резисторов могут встретиться нижеследующие отклонения от нормальной работы привода.
Неустойчивая работа на больших скоростях. Причина: неправильная установка R53 в плате усилителя аналоговой части привода. Для регулировки необходимо вынуть плату и соединить ее с разъемом при помощи удлинительного жгута. Включить привод и поворотом ползунка R53 добиться нормальной работы привода во всем диапазоне изменения уровня частоты вращения. В момент включения напряжения сети двигатель делает поворот на угол 20—50°. Это устраняется настройкой R74 в блоке ПИ.
Неравномерное вращение на малой частоте. Причина: неточно установлена головка датчика положения. При помощи двухлучевого осциллографа надо настроить оба канала фотоимпульс - ного датчика так, чтобы сдвиг по фазе между ними составил 90 эл. градусов.
Нормальная работа привода обеспечивается правильной и точной настройкой аналоговой части привода. Это особенно важно при использовании другого типа двигателя. При этом необходимо вынуть платы ПИ и ПУ и при помощи батарейного задатчика (потенциометр R=
msd.com.ua
На станках с ЧПУ перемещение рабочих органов по каждой координате осуществляется от отдельного привода. Число этих приводов на одном станке определяется видом и количеством движений рабочих органов. На сложных станках это число достигает пяти - семи приводов.
Общими требованиями для приводов являются следующие: 1) регулирование подач в широком диапазоне частот вращения; 2) обеспечение постоянного крутящего момента на рабочих подачах; 3) высокая стабильность поддержания установленной скорости резания; 4) высокая точность перемещения рабочего органа станка в широком диапазоне скоростей и в соответствии с заданной программой.
Отношение максимальной скорости подачи к минимальной для приводов станков с ЧПУ: для расточных, фрезерных и токарных - 1000; координатно-расточных и многоцелевых - 2000...3000.
Максимальная скорость подачи необходима на вспомогательных ходах, когда требуется быстрый подход рабочего органа в заданное положение. В механизмах подач на станках с ЧПУ применяют электромеханический, электрический, шаговый и электрогидравлический приводы.
Требования к приводам подач.
1. Возможность дистанционного управления по командам ЧПУ.
2. Расширенный диапазон регулирования скоростей подач, обусловленный, с одной стороны, высокими значениями ускоренных перемещений рабочих органов, а с другой - необходимостью осуществления малых, так называемых ползучих подач для более точного автоматического позиционирования.
3. Более высокая жесткость механической характеристики, необходимая для обеспечения бесскачкового перемещения на малых подачах.
4. Повышенная плавность перемещения рабочих органов.
5. Повышенная долговечность, обусловленная более интенсивной работой подвижных элементов привода.
6. Малая инерционность привода для станков, оснащенных контурным или универсальным устройством ЧПУ.
Электроприводы оснащаются устройствами защиты, которые должны обеспечивать отключение преобразователей электроприводов от сети, а также защиту двигателя и других элементов от перегрузок при аварийных режимах.
Преобразователи приводов подач эксплуатируются в следующих условиях: температура окружающего воздуха 5. . . 45°С; максимальная влажность 80% при 30°С; питание привода производится от трехфазной сети с номинальным напряжением 220; 380; 440 и 500 В с допусками +10 и -15%; частота сети 50 Гц ±2% или 60 Гц ± 2%.
В станках с ЧПУ с электроприводами в качестве исполнительных органов применяют электродвигатели постоянного тока с регулированием частоты вращения в диапазоне от 1:1000 до 1:4000. В станках с ЧПУ отечественного производства широкое применение находят тиристорные преобразователи (табл. 6).

Электропривод постоянного тока серии ЭТ6 (рис. 21) предназначен для регулирования частоты вращения электродвигателя постоянного тока в широком диапазоне и применяется в качестве привода подачи и привода главного движения. Электродвигатели для станков с ЧПУ поставляются со встроенными тахогенераторами постоянного тока. Электропривод серии ЭТ6 состоит из двух замкнутых ПИ-регуляторов: контура скоростей контура тока. При наличии рассогласования ∆U1 на входе регулятора скорости PC на его выходе формируется сигнал, пропорциональный этому рассогласованию, который, сравниваясь с текущим значением тока якоря, поступает на вход регулятора тока РТ, который усиливает эту разность и подает управляющее напряжение на схему формирования управляющих импульсов, которая формирует и распределяет импульсы управления силовыми тиристорами. По мере уменьшения рассогласования (под действием отрицательной обратной связи по скорости) происходит стабилизация частоты вращения двигателя на уровне задающего напряжения U3. Коэффициент усиления системы регулирования обеспечивает необходимый диапазон регулирования и достаточную точность поддержания частоты вращения при различных возмущающих воздействиях.

Ограничение тока якоря двигателя в динамическом режиме осуществляется путем ограничения напряжения выхода PC. Предусмотрено нелинейное ограничение тока в функции скорости.
Схема преобразователя (рис. 22) состоит из согласующего трансформатора ТС, управляемого выпрямителя, токоограничивающих дросселей Д1 и Д2. Трансформатор - трехфазный, имеет две силовые обмотки и обмотку для питания цепей управления. Между силовой обмоткой и обмоткой управления имеется экран.
Выпрямитель состоит из 12 тиристоров, включенных по шестифазной однополупериодной встречно-параллельной схеме. Для ограничения токов служат дроссели; для защиты тиристоров от перенапряжений - защитные RC-цепочки. Схема формирования управляющих импульсов осуществляет формирование и распределение управляющих импульсов на тиристоры и состоит из шести идентичных каналов управления.
Пропорционально-интегральный регулятор скорости. Выполнен на трех микросхемах. Схема первого каскада, состоящая из двух операционных усилителей, обеспечивает термостабильность характеристик электропривода. Второй каскад служит для получения необходимого коэффициента усиления. Регулятор тока с датчиком тока выполнен на операционном усилителе и представляет собой ПИ-регулятор. Датчик тока предназначен для передачи на вход регулятора тока сигнала обратной связи, пропорционального току якоря электродвигателя. Датчик тока выполнен на основе магнитодиодов, включенных в мостовую измерительную схему с усилителем.

Схема ограничения производной (СОП) входит в контур регулирования тока якоря и обеспечивает ограничение динамических уравнительных токов путем ограничения скорости нарастания напряжения на входе СИФУ. Схема ограничения предельных углов регулирования предназначена для исключения превышения опорного напряжения на динамических режимах и при изменении напряжения питающей сети.

Схема ограничения тока якоря обеспечивает ограничение тока на заданном уровне, в том числе и нелинейное ограничение в функции частоты вращения электродвигателя. Ограничение тока якоря осуществляется ограничением выходного напряжения регулятора скорости. Величина ограничения тока якоря регулируется в широком диапазоне.


Схема защиты предназначена для осуществления защиты электропривода при неправильном подключении фаз, обрыве любой из них, при исчезновении стабилизированного питания любой полярности при перегреве электродвигателя.
Источники питания обеспечивают питание цепей управления постоянным стабилизированным напряжением и собраны по схеме двухканального стабилизатора с последовательно включенными регулирующими транзисторами. Преобразователь монтируется в электрошкаф в вертикальном положении. При монтаже электропривода обратить особое внимание на надежность заземления корпусов электродвигателя, тиристорного преобразователя, дросселей и согласующего трансформатора.
Комплектные тиристорные электроприводы типа БТУ3601 применяют в механизмах подач станков с ЧПУ с высокомоментными электродвигателями постоянного тока мощностью 0,5. . . 18,5 кВт, а также других типов двигателей со встроенными тахогенераторами, имеющими номинальный ток не более 100 А.
Электроприводы типа БТУ3600 могут работать в следующих условиях: температура окружающей среды от 1 до 45°С; вибрации блока преобразователя, силового трансформатора и сглаживающего дросселя в диапазоне 10. . .30 Гц при ускорении 0,5 g; рабочее положение преобразователя - вертикальное.
Электропривод БТУ3600 (рис. 23). Силовая часть устройства (рис. 24), выполненная в виде реверсивного трехфазного мостового тиристорного управляемого выпрямителя, работающего по принципу раздельного управления силовыми комплектами тиристоров КТВ и КТН с запиранием неработающего комплекта (без уравнительных токов), подключается к питающей сети через трансформатор. Схема управления электроприводом выполнена по принципу двухконтурной системы подчиненного регулирования параметров с ПИ-регулятором тока и скорости и конструктивно размещена на двух съемных платах. Преобразователь выполнен в открытом исполнении с односторонним обслуживанием и предназначен для встройки в шкафы комплектных устройств. Динамические характеристики приводов определяют производительность, что не характерно для других станков, где электропривод предназначен для длительных режимов работы с номинальными мощностями.
Динамические характеристики электропривода по нагрузке влияют на точность и качество обработки, стойкость инструмента. Устойчивый процесс резания при необходимой точности обрабатываемой поверхности возможен, если параметры настройки привода обеспечивают при резком увеличении момента нагрузки (в пределах номинального) максимальное снижение скорости не более чем на 40%, с восстановлением первоначального значения за ≤ 0,25 с.
Конструкция станков вследствие уменьшения механической части привода подач изменилась. В ряде случаев стала возможной установка высокомоментных электродвигателей на ходовой винт, что привело к исключению коробок передач. В связи с этим снизилась нагрузка на двигатель при холостых перемещениях и возросла составляющая силы резания.

Асинхронные двигатели переменного тока в станочных системах с ЧПУ используют в качестве привода главного движения, привода насосов гидростанций, привода насоса охлаждения, привода конвейеров уборки стружки и в других целях. Наиболее широко распространены в станках с ЧПУ асинхронные электродвигатели серии 4А, разработанные взамен двигателей АГ, АОП, А0Л2 и А02.
Асинхронные трехфазные короткозамкнутые двигатели серии 4А предназначены для приводов различных механизмов станков, работающих от сети переменного тока частотой 50 Гц при напряжении 220/380 В. Эти двигатели могут эксплуатироваться при -5. . .+10% отклонений напряжения и ± 2,5% отклонений частоты сети. При одновременном отклонении напряжения и частоты сети двигатель должен сохранять номинальную мощность, если сумма абсолютных значений отклонений этих величин не превосходит 10% и каждое из этих отклонений не превышает норму [2,15, 30].
В асинхронном двигателе серии 4А (рис. 25) охлаждение осуществляется центробежным вентилятором, расположенным на валу двигателя со стороны, противоположной рабочему концу [2].
На рис. 26 представлена конструкция двигателя, в котором охлаждение осуществляется в виде двусторонней симметричной радиальной вентиляции. Воздух засасывается вентиляционными лопатками ротора через торцовые окна в щитах, с помощью диффузора охлаждает лобовые части обмоток статора, сердечник ротора и выводится в боковые окна станины. Торцовые и боковые окна двигателя защищены жалюзи.

В зависимости от исполнения двигатели серии 4А предназначены для эксплуатации в районах с умеренным, тропическим или холодным климатом. Для умеренного климата температура воздуха - 45. . . +45°С, допустимая среднемесячная относительная влажность окружающего воздуха при температуре 20°С до 80%.
При эксплуатации возможны вибрационные нагрузки в диапазоне частот 1... 35 Гц и максимальным ускорением до 0,5 g (ударные нагрузки недопустимы). Расчетный срок службы двигателей - не менее 15 лет при наработке 40000 ч. Наработка обмотки статора ≥ 20000 ч, наработка подшипников ≥12000 ч.
Двигатели изготовляют со станиной и щитами следующих исполнений: 1) станина и щиты алюминиевые, двигатели с высотой оси вращения 56... 63 мм; 2) станины и щиты чугунные, двигатели с высотой оси вращения 71. . . 350 мм; 3) станина алюминиевая, щиты чугунные, двигатели с высотой оси вращения 71. . .100 мм.
Магнитопроводы статора и ротора собраны из штампованных листов электротехнической стали толщиной 0,5 мм. В предварительно изолированные пазы статора уложена обмотка.
Двигатели имеют на роторе литую короткозамкнутую обмотку из алюминия. С торца обмотки отлиты выступающие лопатки, которые служат для отвода теплоты от активной части ротора и для перемещения воздуха в статоре.
Тепловые характеристики электродвигателей приводов. В электроприводах вспомогательных механизмов, как правило, используют нерегулируемые асинхронные двигатели с короткозамкнутым ротором. Электроприводы вспомогательных механизмов станков с ЧПУ работают в режимах кратковременных нагрузок и должны обладать повышенным пусковым моментом и высокой перегрузочной способностью. Время пуска электродвигателя малой мощности без нагрузки 0,2.. . 0,3 с, время пуска с нагрузкой 1... 2 с. Во время разгона пусковой ток в 5... 7 раз превышает номинальный Iном, поэтому число повторных пусков должно быть ограничено.
Наиболее опасным для перегрева является режим работы электродвигателя при реверсировании. Увеличение тока обмоток при реверсе двигателей может в 10 раз превышать номинальные значения тока. В связи с этим уровень тока срабатывания максимальной защиты автомата в схемах реверсируемых двигателей должен быть в 12. . . 14 раз выше номинального тока. Ток настройки теплового реле выбирают равным Iном. В этом случае при нагрузке двигателя, равной 1,2. . . 1,3 номинальной, тепловое реле должно срабатывать не позднее чем через 20 мин после пуска. При нагрузке, не превышающей номинальную, тепловое реле не должно срабатывать. Допустимый нагрев, условия и время пуска электродвигателей постоянного тока аналогичны приведенным выше для асинхронных электродвигателей.
При наладке электропривода любого механизма станка с ЧПУ первоначальное включение электродвигателя должно производиться только после готовности к работе приводимого им механизма. Проверка изоляции осуществляется методом прозванивания цепей электрическим щупом или мегоомметром с выходных зажимов магнитного пускателя, автоматического выключателя, предохранителей или другого пускового устройства.
Первоначальное включение электродвигателя производится на 1... 2 с. При этом проверяется легкость хода механизма (по отсутствию треска, шума и т. п), отсутствие задевания крыльчаткой вентилятора двигателя его кожуха, а также правильность направления вращения вала двигателя. Изменение направления вращения вала односкоростного электродвигателя осуществляется переключением любой пары питающих проводов на его выводах.
Далее производится двух-, трехкратное кратковременное включение двигателя с постепенно нарастающей продолжительностью включения, после чего электродвигатель может быть включен на более продолжительный период времени.
Для частотного управления на базе двигателей серии 4А разработаны электродвигатели, рассчитанные на питание от вентильных преобразователей частоты. Ввиду того, что двигатели имеют самовенти- ляцию, при снижении частоты вращения якоря ухудшаются условия охлаждения и на минимальной частоте, равной 0,2 hном, допустимый по нагреву момент нагрузки должен быть равным половине номинального.
Наладка преобразователя электропривода заключается в проведении комплекса работ по испытанию, проверке и настройке тиристорного преобразователя (ТП) с целью обеспечения его надежной работы. Заводы-изготовители, как правило, поставляют заказчикам предварительно проверенные и налаженные электроприводы, что позволяет сократить объем работ по наладке преобразователей. Наладка преобразователя включает проверку силовой части схемы, настройку системы управления и защиты.
Для обеспечения наладочных работ используют электроизмерительные приборы, приспособления, осциллографы с классом точности 0,5. . .1. Наладка выпрямителя выполняется в следующей последовательности: производят осмотр силовых блоков шкафов и проверяют наличие заземления; определяют правильность включения индуктивных делителей тока; измеряют сопротивление изоляции токоведущих цепей.
Наладка системы управления выполняется в следующей последовательности: производится осмотр блоков и комплектности системы управления; проверяется напряжение источников питания и правильность чередования фаз; контролируется узел синхронизации; проверяется форма и правильность чередования управляющих импульсов. Настройка системы защиты производится после настройки систем управления, охлаждения и сигнализации.
Для управления тиристорами служит система импульсно-фазового управления (СИФУ), позволяющая подавать на тиристоры управляющее напряжение с частотой питающего напряжения в заданный момент и в заданной фазе по отношению к нему. Наладку СИФУ начинают с фазировки ТП. При питании ТП от сети надо предварительно проверить симметрию фазовых напряжений и их значения. При отсутствии контрольных гнезд на панели СИФУ можно подключить осциллограф к управляющим электродам тиристоров моста выпрямителя. Если заметного различия в форме импульсов нет, их сравнивают с контрольной осциллограммой.
Целью фазировки ТП является согласование анодных и управляющих напряжений по фазе. Фазировку производят двухлучевым осциллографом (типов С1-16, С1-18 и С1-64). При отсутствии двухлучевого можно воспользоваться однолучевым осциллографом (типов С1-19 и С1-68), подавая анодное и отпирающее напряжения поочередно.
Проверив СИФУ, можно подать напряжение на силовые блоки ТП, предварительно отключив нагрузку. Затем, подключив нагрузку (балластные резисторы), снимают регулировочную характеристику ТП - зависимость выпрямленного напряжения от угла отпирания тиристоров.
Для устранения автоколебаний выпрямленного напряжения ТП используют корректирующие звенья, которые включают в прямой канал регулирования последовательно с объектом регулирования (последовательная коррекция) или в цепь обратных связей (параллельная коррекция).

В конце наладки, при предварительно замкнутой цепи нагрузки, производится трехкратное кратковременное включение и отключение преобразователя с целью проверки узлов защиты от перенапряжений и исправности силовых тиристоров.
При замкнутой цепи нагрузки и изменении сигнала на входе управления U3 снимается сквозная регулировочная характеристика: UЯ=f(U3), с целью проверки плавности изменения напряжения. Одновременно по форме выпрямленного тока или напряжения окончательно оценивается правильность настройки привода (табл. 7).
naladchik-stankov.ru
Синхронные трехфазные двигатели (СД) широко применяются в электроприводах самых разнообразных рабочих машин и механизмов, что объясняется их высокими технико-экономическими показателями.
1.Синхронные двигатели имеют высокий коэффициент мощностиcos, равный единице для электроприводов небольшой мощности и опережающийcosв установках большой мощности. Способность СД работать с опережающимcosи отдавать в сеть реактивную мощность позволяет улучшать режим работы и экономичность сети электроснабжения.
2.Высокий КПД современных СД, составляющий 96–98 %, что на 1–1,5 % выше КПД АД тех же габаритов и скорости.
3.Возможность регулирования перегрузочной способности СД за счет регулирования тока возбуждения и меньшая зависимость этого показателя от напряжения сети по сравнению с АД.
4.Синхронный двигатель обладает абсолютно жесткой механической характеристикой.
5.Важным преимуществом конструкции СД является большой воздушный зазор, вследствие чего его характеристики и свойства мало зависят от износа подшипников и неточности монтажа ротора.
6.Возможность их изготовления на очень большие мощности (до нескольких десятков мегаватт и более).
На рис. 5.1 приведена схема включения СД. На статоре СД, выполненном аналогично статору АД, располагается трехфазная обмотка, подключенная к сети переменного тока.

Ротор СД выполняется с двумя обмотками: обмоткой возбуждения постоянного тока и короткозамкнутой пусковой обмоткой в виде беличьей клетки. Пусковая обмотка обеспечивает механическую характеристику СД в виде одной из кривых, показанных на рис. 5.2, а. Характеристика1обеспечивает по сравнению с характеристикой2больший «входной» момент СД (Mв1>Mв2), но меньший пусковой момент (Mп1<Mп2). Выбор вида пусковой механической характеристики определяется конкретными условиями работы СД.

После вхождения СД в синхронизм его скорость при изменениях момента нагрузки на валу до некоторого максимального значения Мmaxостается постоянной и равной угловой скорости магнитного поля (синхронной скорости)
 (5.1)
(5.1)
где р– число пар полюсов СД;f1– частота питающей сети.
Поэтому его механическая характеристика имеет вид горизонтальной прямой линии, показанной на рис. 5.2, б. Если момент нагрузки превысит значениеМmax, то СД может выпасть из синхронизма.
Для определения максимального момента СД Мmax, до которого сохраняется синхронная работа СД с сетью, служит угловая характеристика СД. Она отражает зависимость моментаМот внутреннего угла СД, представляющего собой угол сдвига между ЭДС статораЕи напряжением сетиUфили, что то же самое, между осью магнитного поля СД и осью его полюсов.
Получим угловую характеристику для неявнополюсного СД при пренебрежении активным сопротивлением обмотки статора (R1=0). Векторная диаграмма для этого случая показана на рис. 5.3,а, где обозначено:x1– индуктивное сопротивление фазы обмотки статора;I–ток статора СД.

Подводимая к СД мощность может быть принята равной электромагнитной мощности
 (5.2)
(5.2)
где Uф– фазное напряжение сети;– угол сдвига между напряжением сети и током СД. Отсюда
 (5.3)
(5.3)
Из векторной диаграммы рис. 5.3, аследует
 (5.4)
(5.4)
Рассмотрение треугольника АВСпозволяет определить, что
 (5.5)
(5.5)
с учетом чего (5.4) запишется как
 (5.6)
(5.6)
Подстановка (5.6) в (5.3) дает следующее выражение:
 (5.7.)
(5.7.)
где Mmax=3UфЕ/(0x1) – максимальный момент СД.
Из выражения (5.7) видно что момент СД представляет собой синусоидальную функцию внутреннего угла машины. Полученное выражение угловой характеристики (5.7) может быть с погрешностью примерно 10–20 % использовано и для явнополюсных СД.
Угловая характеристика СД показана на рис. 5.3, б. Максимального значения момент СД достигает при=/2. Эта величина характеризует собой перегрузочную способность СД. При больших значениях угла СД выпадает из синхронизма, а при меньших углахего работа устойчива.
Важной величиной является номинальный угол сдвига ном, его значение равно 25–30°, которому соответствует номинальный моментMном. При таком значенииномм=Мmax/Mном=22,5.
Синхронный двигатель может работать во всех основных энергетических режимах, а именно: двигательном и генераторном при параллельной и последовательной работе с сетью и независимо от сети. При этом режим генератора последовательно с сетью (торможение противовключением) используется редко из-за того, что перевод СД в этот режим сопровождается значительными бросками тока и требует применения сложных схем управления.
Для осуществления торможения СД чаще используется генераторный режим при работе независимо от сети переменного тока (режим динамического торможения). Для реализации этого режима обмотка статора СД отключается от сети и замыкается на дополнительный резистор R1д, как показано на рис. 5.4,а, обмотка возбуждения продолжает питаться от источника, постоянного тока.

Механические характеристики СД в этой схеме подобны характеристикам АД при динамическом торможении. При изменении R1ди тока возбужденияIвполучаются различные искусственные характеристики СД.
studfiles.net
1. Нерегулируемые и регулируемые электроприводы.
2. Программируемые контроллеры и промышленные компьютеры [2].
3. Контрольно-измерительные средства.
4. Коммутационная и защитная аппаратура.
В качестве нерегулируемых по скорости электроприводов используются, как правило, электроприводы с асинхронными короткозамкнутыми электродвигателями переменного тока.
Асинхронные двигатели нерегулируемых электроприводов малой и средней мощности запускаются прямым включением в сеть без ограничения пусковых токов. В таких электроприводах применяются релейно-контакторные схемы управления. Основные узлы управления в таких электроприводах выполняют функции коммутации и защиты.
После включения двигателя и затухания переходного процесса в двигателе устанавливается начальный пусковой ток. Величина начального пускового тока составляет от 4-х до 8-кратной величины номинального тока двигателя и не зависит от нагрузки. Амплитудное значение тока первого полупериода после включения может достигать 12-кратного значения номинального тока. Длительность протекания пускового тока (разгона двигателя) зависит от момента нагрузки и момента инерции привода (прямо пропорциональна). Большой пусковой ток в течение нескольких секунд вызывает нагрев обмоток статора и ротора до высоких температур, так как за это короткое время в железо успевает перейти лишь небольшое количество тепла. Длительностью до 10 секунд пуск считается нормальным, при большем времени – тяжелым.
Асинхронные электродвигатели защищают:
– от токов коротких замыканий и от больших токов при недопустимых перегрузках, если они возможны по условиям работы – максимальная токовая защита;
– от больших кратковременно допустимых перегрузок или если необходимо ограничить длительность времени пуска – время-токовая защита;
– от длительной небольшой перегрузки (от перегрева) – тепловая защита;
– от исчезновения (выпадения) фазы – дифференциальная защита;
– от понижения или исчезновения напряжения и последующего самозапуска (если он недопустим) – минимально-нулевая защита.
Максимальная токовая защита осуществляется плавкими предохранителями, автоматическими выключателями с электромагнитными (ток срабатывания  ) или комбинированными (электромагнитные и тепловые) расцепителями и электромагнитными реле тока.
) или комбинированными (электромагнитные и тепловые) расцепителями и электромагнитными реле тока.
Тепловая защита осуществляется плавкими предохранителями, тепловыми расцепителями автоматических выключателей и тепловыми реле электромагнитных пускателей. Плавкие предохранители характеризуются время-токовыми зависимостями.
Время-токовая защита осуществляется с помощью тепловых реле с токовременной зависимостью (при пуске двигателя с 6-кратным номинальным током отключение должно происходит по истечении 10 секунд), а так же с помощью реле тока и реле времени.
Дифференциальная защита осуществляется тепловыми реле с дифференциальными устройствами защиты от выпадения фазы.
При отсутствии одной из фаз, возрастают токи в двух других фазах и потери в двигателе становятся в 1,5-2 раза больше. Тепловая защита в этом случае отключает двигатель, когда он уже перегрелся.
Для того, чтобы в условиях асимметрии сети и однофазного режима работы обеспечить надежную работу двигателя реле перегрузки должно быть оснащено дифференциальной защитой.
Тепловое реле конструктивно представляет собой биметаллическую пластину и обмотку нагревателя, по которой протекает ток двигателя. В зависимости от конструкции тепловое реле может иметь регулировку тока уставки в пределах от 0.1 до 1.1 , компенсацию температуры окружающей среды и дифференциальное устройство отключения (защиты от выпадения фазы).
, компенсацию температуры окружающей среды и дифференциальное устройство отключения (защиты от выпадения фазы).
Минимальная защита осуществляется минимальными расцепителями автоматических выключателей с регулируемым значением уставки напряжения отключения выключателя  или непосредственно контакторами электромагнитных пускателей, которые отключаются при снижении питающего катушки контакторов напряжения до значения
или непосредственно контакторами электромагнитных пускателей, которые отключаются при снижении питающего катушки контакторов напряжения до значения .
.
Главной задачей устройства защиты двигателя является его своевременное срабатывание, прежде чем температура двигателя достигнет критического значения. В то же время устройства защиты не должны срабатывать, если двигатель:
– работает в продолжительном режиме работы (S1) с номинальным током;
– в течении допустимого времени разгона и торможения работает с начальным пусковым током;
– в горячем состоянии перегружен 1,5-кратным номинальным током в течении 2 минут;
– эксплуатируется в режимах работы S2…S8.
Токи уставки аппаратов максимальной и тепловой защиты асинхронных электродвигателей с короткозамкнутым ротором выбираются соответственно из условий:
 ;
;  .
.
Примером нерегулируемых электроприводов с прямым включением в сеть могут служить электроприводы следующих общепромышленных механизмов: тихоходных лифтов, конвейеров, вентиляторов, насосов, компрессоров.
В качестве примера на рис. 2.3 приведена схема электрическая принципиальная нерегулируемого нереверсивного асинхронного электропривода. Электропривод к трехфазной сети подключен с помощью автоматического выключателя QF с электромагнитными расцепителями (максимальная защита). Дистанционное включение (пуск) и отключение (останов) электропривода осуществляется посредством нереверсивного магнитного пускателя, в состав которого входит линейный контактор КМ и два тепловых реле КК (тепловая защита). Управление работой электропривода осуществляется с помощью двухкнопочной станции: при нажатии на кнопку SB1 происходит пуск электропривода, при нажатии на кнопку SB2 – останов.

Рис. 2.3. Схема электрическая принципиальная нерегулируемого нереверсивного асинхронного электропривода
При срабатывании максимальной защиты автоматический выключатель отключает электропривод от сети, обесточивается катушка контактора КМ, контактор отпадает и отключает двигатель.
При срабатывании тепловой защиты размыкается н.з. контакт тепловых реле КК в цепи катушки контактора КМ, контактор отпадает и отключает двигатель. Двигатель тормозится выбегом под действием реактивного статического момента (сил трения и полезной нагрузки). Для возобновления работы электропривода после срабатывания тепловых реле КК необходимо снять их блокировку. Пуск двигателя без этого невозможен.
При понижении или исчезновении напряжения контактор КМ отключается и отключает двигатель. После восстановления напряжения самозапуск двигателя невозможен, а его последующий пуск происходит только после нажатия кнопки SB2.
Цепи управления от токов короткого замыкания защищаются плавкими предохранителями F1.
Автоматический выключатель QF может быть заменен рубильником P с предохранителями F.
Если необходимо осуществить реверс двигателя (изменить направление вращения путем смены чередования фаз), то применяется реверсивный магнитный пускатель, который включает в себя два линейных контактора КМ1 и КМ2 и два тепловых реле защиты КК (рис. 2.4). Катушки контакторов КМ1 и КМ2 имеют электрическую блокировку цепей питания (н.з. контакты контакторов КМ1 и КМ2), а подвижные части контакторов – механическую. Это исключает короткое замыкание в цепи статора двигателя, которое может возникнуть в результате одновременного включения контакторов, например, в результате ошибочного нажатия на обе кнопки SB1 и SB2.

Рис. 2.4. Схема электрическая принципиальная нерегулируемого реверсивного асинхронного электропривода
В схеме рис. 2.4 управление двигателем возможно по следующим двум схемам:
– пуск «Вперед» – останов – пуск «Назад» – останов и т.д.;
– пуск «Вперед» – реверс «Назад» – реверс «Вперед» и т.д. – останов.
Процесс реверсирования состоит из двух этапов – торможения противовключением и разгона двигателя в противоположную сторону.
Как уже отмечалось, нерегулируемый асинхронный электропривод является массовым электроприводом простейших производственных механизмов: вентиляторов, насосов, компрессоров, конвейеров и т.д. Отметим основные недостатки нерегулируемого электропривода:
– большие пусковые токи, что может приводить к просадке напряжения маломощной сети потребителя и отключению электроприводов других механизмов;
– большие недопустимые динамические нагрузки механизмов, что может приводить к их преждевременному выходу из строя и разрушению;
– большие потери электроэнергии при необходимости регулирования производительности механизмов, например, насосов или вентиляторов, которая в этом случае регулируется с помощью задвижек и заслонок. Механизм в этом случае работает с меньшей производительностью, но с большим напором и потребляемая электродвигателем мощность из сети практически остается неизменной. Экономически целесообразно было бы работать с открытой задвижкой и меньшими оборотами электродвигателя.
Среди энергосберегающих мероприятий в производстве и сфере услуг наибольший экономический эффект дает замена асинхронного нерегулируемого электропривода регулируемым электроприводом. Учитывая, что нерегулируемые электроприводы составляют порядка 80% от их общего количества, это направление энергосбережения электроэнергии весьма актуально в настоящее время.
studfiles.net
ОГА ПОУ «Яковлевский политехнический техникум»
Методические указания
по выполнению лабораторной работы
«Наладка релейно-контакторной системы управления
электроприводов с асинхронным двигателем»
Разработал : мастер п/о
Винников А.А.
г. Строитель
Методические указания по выполнению лабораторной работы предназначены для обучающихся по профессии 21.01.10 «Ремонтник горного оборудования».
Лабораторная работа проводится с целью:
систематизации и закрепления полученных теоретических знаний студентов;
углубления и расширения теоретических знаний;
развития познавательных способностей и активности обучающихся, самостоятельности, ответственности и организованности;
формирования самостоятельности мышления, способностей к саморазвитию, самосовершенствованию и самореализации.
Безопасность труда и электробезопасность при выполнении лабораторных работ
Лабораторные стенды являются действующими электроустановками и при определенных условиях могут стать источником опасности поражения человека электрическим током. Поэтому при работе в лаборатории необходимо строго соблюдать установленные правила безопасности труда, электробезопасности и пожаробезопасности.
Каждый обучающийся, находясь в лаборатории, обязан быть дисциплинированным, внимательным, чувствовать ответственность при выполнении практических работ, начиная с подготовки к их выполнению и заканчивая оформлением отчета и сдачей зачета.
До начала работ в лаборатории обучающиеся должны повторить материал по специальным дисциплинам, пройти инструктаж по безопасности труда, электробезопасности и пожаробезопасности.
Приступая к выполнению лабораторно-практических работ, студенты должны соблюдать следующие правила.
Находясь в лаборатории и приступая к практической работе на лабораторном стенде, студент должен помнить об опасности поражения электрическим током и быть осторожным.
На лабораторном стенде можно размещать только предметы, необходимые для выполнения данной работы.
После получения задания практической работы, студенты должны разобраться в приведенной в ней электрической схеме, продумать последовательность выполнения работы.
Осмотреть на лабораторном стенде электрооборудование и приборы, убедиться в их исправности, проверить состояние изоляции соединительных проводов. Нельзя пользоваться проводами без наконечников. При неисправности электрооборудования обязательно обратиться к преподавателю.
Прежде чем приступить к сборке схемы на стенде, проверить каким выключателем подается напряжение, какой величины. Убедиться, что контакты автоматов защиты разомкнуты и указатели положения элементов регулирования лабораторных источников питания расположены в положении «нуль». Все выключатели должны находиться в отключенном положении.
При сборке схемы необходимо избегать пересечения проводов, обеспечивать надежность контактов всех разъемных соединений. Неиспользованные провода не оставлять на лабораторном стенде.
В собираемой схеме аппараты включать на напряжение, соответствующее источнику питания, а электроизмерительные приборы с пределами измерения – на ожидаемые измеряемые величины.
Схему собирать строго в той последовательности, которая указана в задании практической работы.
Сборка схемы разрешается только в объеме выполняемой работы.
Включение собранной схемы и первое её опробование возможно только с разрешения преподавателя.
Запрещается размыкать цепь вторичной обмотки трансформатора тока, если его первичная обмотка включена в сеть.
Прежде чем разобрать электрическую схему или произвести любые изменения в ней, необходимо убедиться, что выключатели (автоматы) защиты, источники питания отключены.
Обнаружив любую неисправность в схеме до включения автомата, немедленно сообщить о неисправности преподавателю.
Критерии оценивания лабораторных работ
Оценка «Отлично» ставится, если студент:
выполнил работу в полном объеме с соблюдением необходимой последовательности проведения опытов, измерений или работ по монтажу или составлению технологических карт;
самостоятельно и рационально выбрал необходимое оборудование, инструменты;
в отчете правильно и аккуратно выполнил все записи, таблицы, рисунки, чертежи, схемы и сделал вывод;
соблюдал технику безопасности, электробезопасности.
Оценка «Хорошо» ставится в том случае, если студент выполнил требования к оценке «отлично», но:
опыт проводился в условиях, не обеспечивающих достаточной точности измерений;
было допущено 2-3 недочета или одна грубая ошибка.
Оценка «Удовлетворительно» ставится, если работа выполнена не полностью, объем выполненной части таков, что позволяет получить правильный результат и выводы, и если в ходе работы студентом допущены следующие ошибки:
опыт проводился в нерациональных условиях, что привело к получению результатов с большой погрешностью;
две ошибки не принципиального значения для данной работы, но повлиявших на результат выполнения;
не выполнен или выполнен неверно вывод по работе.
Оценка «Неудовлетворительно» ставится, если обучающийся:
выполнил работу не полностью и объем выполненной части не позволяет сделать вывод;
произвел опыты, измерения, расчеты, наблюдения или работы не правильно;
в ходе работы или отчета не соблюдал требования безопасности труда, электробезопасности.
Лабораторная работа 1
Наладка релейно-контакторной системы управления электроприводов с асинхронным двигателем.
Цель работы: Получение навыков по наладке электропривода с асинхронным двигателем с короткозамкнутым ротором.
I. Порядок выполнения работы
1. Анализ работы электропривода по принципиальной схеме, проверка соблюдения необходимой очередности в работе аппаратуры, отсутствие ложных и обходных (путей) цепей, обеспечение всех технологических требований, наличие необходимых защит и блокировок, выявление схемных ошибок.
2. Проверяется соответствие установленного электрооборудования проекту, паспортизация электрической машины, других аппаратов» их паспортные данные:
Таблица 1 Паспортные данные
Тип оборудованияТехнические характеристики
3. Составить монтажные схемы, внутренних и внешних соединений,
4. По принципиальной схеме проверить монтажные схемы, правильность маркировки на принципиальной схеме, соответствие маркировке на монтажной схеме.
5. Внешний осмотр двигателя.
6. Ознакомление с номинальными данными по заводской табличке на корпусе.
а) Записать номинальное значение механической мощности на валу электродвигатели, которое может быть передано приводному механизму.
б) Посчитать значение активной мощности потребляемой от питающей сети:
Рфак=Рп/ η, кВт
в) Посчитать значение полной мощности;
S=Р/соs φ, кВА
7. а) прозвонить обмотки двигателя, с целью проверки на отсутствие обрыва,
б) Определить выводы принадлежащие одной и той же обмотке, о помощью тестера или вольтметра и выводы прономеровать 1-1; 2-2; 3-3 как показано на рисунке 1.
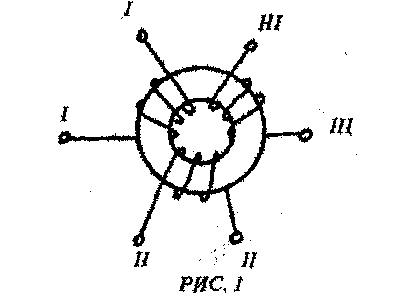
Рисунок 1. Схема выводов обмоток
в) Определить начало и конец обмоток;
первую обмотку статора подключить к источнику переменного тока, на зажимах второй и третьей обмотки измерить напряжение, как показано на рисунке 2.
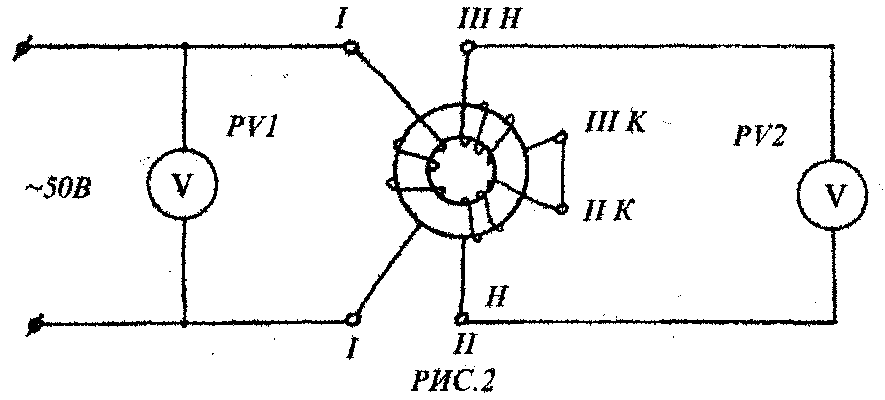
Рисунок 2. Схема опыта
Если вольтметр показал отсутствие напряжения, то следует пере соединить 2 и 3 обмотки как показано на рисунке З, При наличии напряжения промаркировать конец начало обмоток.
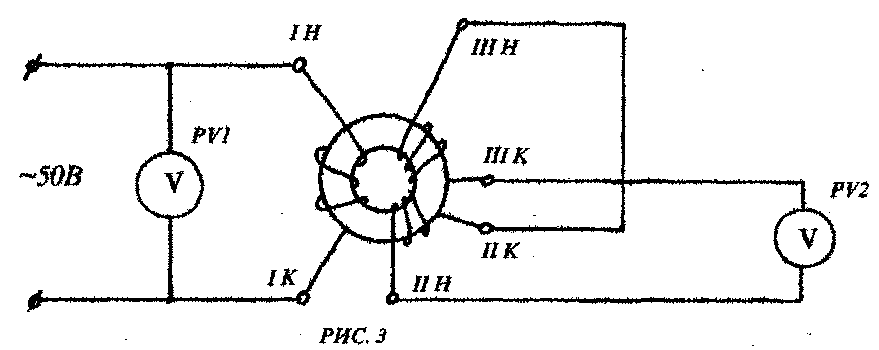
Рисунок 3. Схема опыта
г) собрать цепь снова и подключить к источнику питания третью обмотку (рисунок 4) а первую и вторую обмотки соединить между собой последовательно и измерить напряжение на обоих обмотках. При наличии напряжения произвести маркировку конца и начала обмоток с учетом предыдущих обозначений конца или начала обмотки. Если показания вольтметра отсутствуют или очень малы то, необходимо произвести пересоединение обмоток аналогично первого опыта.
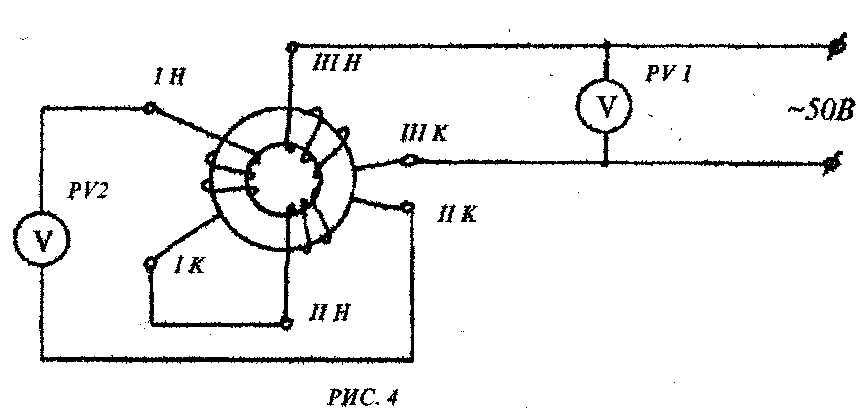
Рисунок 4. Схема опыта
8. Проверить исправность изоляции двигателя, т.е. измерить Rиз, Кабс
Rдоп>0,5МОм Измерения производится мегомметром
Ka6c=R60/Rl5
При пробое или увлажнении изоляции образуются дополнительные пути для тока утечки между проводниками обмотки (витковое замыкание) или между обмоткой и корпусом (замыкание на корпус).
Ток утечки создает местный нагрев, который может привести к полному выходу машины из строя , а то и к пожару. Двигатели с витковыми замыканиями нужно отправить в ремонт, а отсыревшие высушить.
9. Определить чередование фаз.
Ни маркировка обмоток, ни схема их соединений не дают представление о том, в какую сторону будет вращаться двигатель при подключения к сети.
Чередование фаз до ГОСТу о трехфазной системе маркируется латинскими буквами А, В и С. За нормальное чередование фаз принято A-B-C. Последовательность чередования фаз проверяется фазоуказатеяем. Если подключить сеть с чередованием А-В-С к соответствующим зажимам фазоуказателя (От С1-С2-С3). При прямом токе в сети вращение диска будет в правую сторону, при обратном - в левую.
10. Проверка пуска двигателя,
1) Проверка механической части привода. Перед пуском надо окончательно убедиться в исправности механической части привода, надежности крепления всех деталей, отсутствии посторонних предметов на вращающихся частях и на валу двигателя. Желательно провернуть двигатель от руки» убедиться, легко ли он вращается (может отсутствовать смазка в подшипниках, крылья вентилятора могут задевать кожух), Включается асинхронный двигатель с помощью магнитных пускателей.
2) Проверка магнитного пускателя.
Магнитный пускатель - трехфазный аппарат, снабженный тепловым реле для защиты электродвигателя от перегрузок. Необходимо, чтобы все три силовых контакта магнитного пускателя замыкались одновременно и надежно.
Вывод: «Механическая часть электродвигателя в нормальном состоянии». Магнитный пускатель проверен и готов к работе.
3) Опробование тепловых реле:
Испытания начинают с опробования механизма реле от руки и проверки соответствия элемента номинальному току двигателя. После установки нагревательного элемента в реле регулировочный рычаг ставят в среднее положение (по заводской риске).
Согласно нормам, предварительно нагретое номинальным током в течении двух часов реле должно срабатывать не позднее, чем через 20 минут с момента повышения тока до 120% номинального. Если этого не произойдет, то нужно передвинуть регулировочный рычаг и добиться срабатывания реле.
Вывод: Тепловое реле выбрано и настроено,
4) Проверка схем управления:
После испытания электродвигателя, тепловых реле» магнитного пускателя измеряют Rиз схемы в сборе. Rиз должно быть не менее 0,5 МОм.
Нажатием кнопки "Пуск" включают пускатель, который должен оставаться включенным и после отпускания кнопки. Если же он отключается, то надо проверить вспомогательный контакт пускателя, шунтирующий кнопку "Пуск".
Затем проверяют действие кнопки "Стоп" и контактов тепловых реле» а так же других контактов схемы, Размыкание любого из этих контактов должно приводить к отключению пускателя, последний не должен включаться от кнопки" Пуск", если разомкнут хотя бы один из них.
Для реверсивной схемы проверяют, кроме того» действие электрической блокировки: при включенном пускателе "вперед" не должен включаться пускатель "назад" и наоборот.
Затем, подав напряжение на силовую цепь, запускают двигатель, он должен вращаться с частотой близкой к синхронной.
После обкатки в течении 15-20 мин измеряют Iхх ( токоизмерительными клещами типа Ц-91) значение которого не должно отличаться от указанного в паспорте двигателя более чем на 10%.
12. Составляется таблица установок защитных и функциональных реле.
II. Электрическая схема опыта
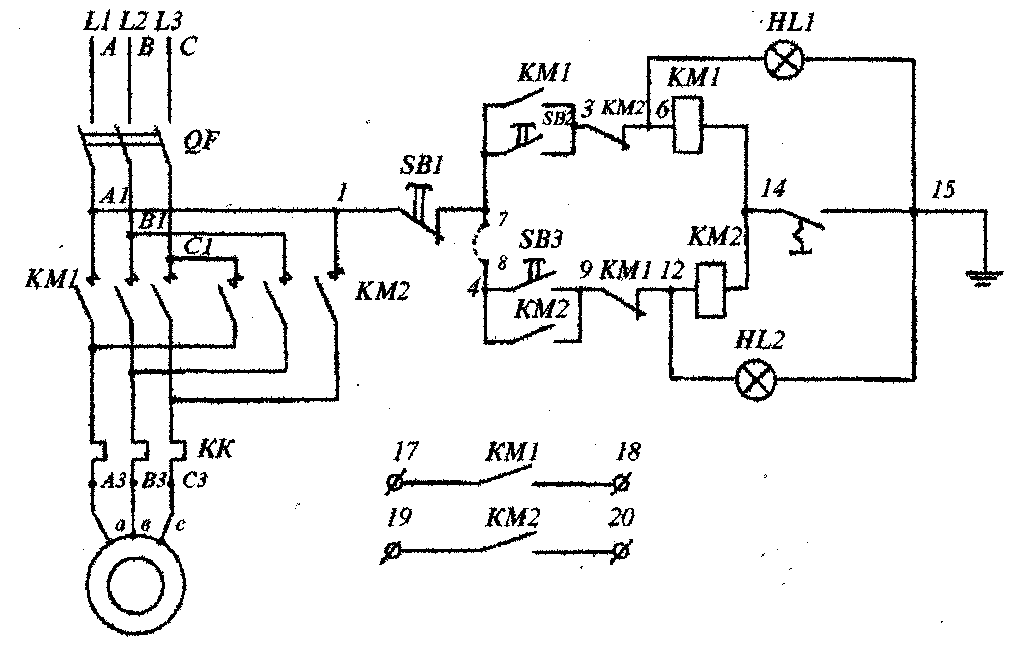
Рисунок 5. Электрическая схема опыта
III Отчет по работе
Записать технические данные исследуемых элементов.
Начертить схемы опытов.
Сделать вывод.
Контрольные вопросы
1. Как производится проверка и испытание электрических машин электропривода?
2. Для чего необходимо измерение сопротивления постоянному току?
3. Как производится проверка соответствия монтажа внешних соединений в принципиальной схеме?
infourok.ru
 Для производства наладочных работ нужны: принципные схемы, схемы наружных соединений, монтажные и принципные схемы заводов — изготовителей пультов, панелей, шифанеров, схемы питания, планы расположения электронного и технологического оборудования, объяснительная записка с технологическими требованиями к электроприводу и расчетом уставок защит и режимов работы.
Для производства наладочных работ нужны: принципные схемы, схемы наружных соединений, монтажные и принципные схемы заводов — изготовителей пультов, панелей, шифанеров, схемы питания, планы расположения электронного и технологического оборудования, объяснительная записка с технологическими требованиями к электроприводу и расчетом уставок защит и режимов работы.
1. Ознакомление с проектом:
а) изучают функции электропривода в составе технологической установки, технологические требования к электроприводу, размещение механизма, пультов управления, панелей, шифанеров и т. п.,
б) анализируют работу электропривода но принципной схеме, инспектируют соблюдение нужной очередности в работе аппаратуры, отсутствие неверных и обходных цепей, обеспечение всех технологических требовании, наличие нужных защит и технологических блокировок, выявляют схемные ошибки,
в) создают поверочные расчеты по выбору уставок защит и многофункциональных реле, инспектируют селективность защит, расчеты по разбивке пусковых и других резисторов, значения сопротивлений резисторов проставляют на принципной схеме,
г) инспектируют соответствие примененной аппаратуры принятым значениям силового и оперативного напряжений, соответствие способностей принятых типов реле данным уставкам,
д) составляют таблицу уставок защитных и многофункциональных реле,
е) по принципной схеме инспектируют монтажные схемы панелей, шифанеров, пультов, наличие и корректность маркировки на принципной схеме, соответствие ее маркировке на монтажной схеме,
ж) на базе схем подключений в рабочей тетради наладчика составляют таблицы всех наружных соединений, относящихся к данному электроприводу.
з) составляют полную однолинейную схему питания электропривода всеми видами напряжения от источников (ячейка распредустройства, трансформаторная подстанция, распределительный шкаф, магистраль и т.д. до каждого присоединения (шкаф, щит, панель),
и) составляют программку наладочных работ, уточняют методики проведения работ, подбирают бланки протоколов наладки для наполнения в процессе проведения работ.
2. Проверка наружным осмотром состояния электрического оборудования, свойства проведенной ревизии, свойства и объема выполненных электромонтажных работ (сличением количества проложенных кабелей с нужным количеством по таблице наружных связей).
3. Проверка соответствия установленного электрического оборудования проекту, паспортизация электронной машины, резисторов и других аппаратов, характеристики которых должны быть внесены в отчет по наладке.
4 Проверка и испытание электронных машин.
 5. Проверка соответствия монтажа внутренних соединений панелей, пультов, шифанеров принципной схеме.
5. Проверка соответствия монтажа внутренних соединений панелей, пультов, шифанеров принципной схеме.
Перед проверкой с целью исключения обходных цепей отключают на блоках зажимов все наружные связи цепей вторичной коммутации. Проверку создают при помощи пробника. Начинают проверку схемы шкафа, панели, пульта с цепей полюсов (фаз) источника оперативного тока, потом инспектируют отдельные цепи.
Инспектируют все провода от контакта к контакту и до блока зажимов и при всем этом непременно создают подсчет количества проводов на каждом контакте с целью выявления излишних проводов и связей, не отраженных на принципной схеме. Обнаруженные излишние провода, которые возможно окажутся под напряжением, следует отключить с 2-ух сторон. При проверке кропотливо держут под контролем и корректируют по мере надобности маркировку цепей на принципной схеме.
В процессе проверки внутренних соединений инспектируют работу замыкающих и размыкающих контактов реле и контакторов методом нажатия и отпускания их якорей, зачищают по мере надобности вспомогательные контакты, инспектируют и регулируют провалы контактов. В процессе проверки внутренних связей инспектируют также диаграммы работы ключей управления. Испытанные цепи отмечают на принципной схеме цветным карандашом.
6. Проверка соответствия монтажа наружных соединений принципной схеме. Проверку создают два наладчика по составленной таблице наружных связей при помощи пробника.
Проверку наружных связей в силовых цепях и цепях возбуждения электродвигателей создают зрительно либо при помощи особых пробников с интегрированным частотным генератором методом прокалывания иголкой изоляции силовых кабелей и проводов. Без особенной необходимости отключать силовые цепи не рекомендуется.
Следует подразумевать, что правильное присоединение силовых проводов к движкам гарантирует сходу правильное направление вращения мотора.
7. Измерение и испытание изоляции силовых цепей и цепей вторичной коммутации.
Измерение сопротивления изоляции начинают с общих цепей, связанных с полюсами (фазами) оперативного напряжения, а потом продолжают для каждой- цепи, потенциально не связанной с этими общими цепями, к примеру отделенной от их с 2-ух сторон замыкающими контактами реле и контакторов. Полупроводниковые элементы, имеющиеся в схеме управления, с целью сохранения от пробоя следует при измерении и испытании изоляции закоротить.
8. Настройка защитных и многофункциональных реле, прогрузка автоматических выключателей.
9. Измерение сопротивления неизменному току реостатов и пускорегулирующих резисторов. Определяют общее сопротивление, которое не должно отличаться от паспортных данных более чем на 10 %, и инспектируют целость отпаек.
10. Проверка частей заземляющих устройств электронных машин, пультов, щитов и т. д. Проверку создают осмотром в границах доступности. Не должно быть обрывов и изъянов в заземляющих проводниках, их соединениях и присоединениях.
11. Проверка функционирования релейно-контакторных схем под напряжением.
Проверку создают при обесточенных силовых цепях после подготовительной проверки полярности оперативного напряжения. Функционирование релейно-контакторных схем инспектируют при номинальном и 0,9 номинального напряжении оперативных цепей.
12. Опробование работы электропривода с ненагруженным механизмом либо на холостом ходу мотора.

Опробование создают при наличии разрешения на прокрутку от электромонтажной организации и службы эксплуатации обученным персоналом эксплуатации под управлением наладчиков, если выполнены все мероприятия по технике безопасности. Обычно, нецелесообразно отсоединение мотора от механизма.
Для электроприводов, имеющих ограниченное перемещение, механизм для первой прокрутки должен быть установлен в среднее положение. Для таких электроприводов в особенности принципиально обеспечить правильное направление вращения (это, как указывалось выше, достигается кропотливой проверкой силовой схемы) и целенаправлено за ранее выставить ограничение хода при помощи путных выключателей.
Перед прокруткой не считая обозначенных выше должны быть выполнены последующие работы: установлена надежная связь меж пультом, панелями управления и механизмом (если на последнем нужно создавать настройку путных выключателей), отрегулирован и опробован электромеханический тормоз, если он имеется на электроприводе, опробованы и запущены в работу все вспомогательные приводы, обеспечивающие нормальную работу мотора и механизма, — системы смазки, вентиляции, гидравлики.
Прокрутку электропривода создают в таковой последовательности:
а) создают краткосрочный толчок привода. При всем этом инспектируют направление вращения, нормальную работу мотора и механизма, работу электромеханических тормозов,
б) создают (для нерегулируемых электроприводов) пуск электропривода до номинальной частоты вращения мотора.
Для систем с глухоподключенным возбудителем инспектируют вхождение синхронного мотора в синхронизм. Для систем с подачей возбуждения мотора в функции тока либо скольжения синхронный движок запускают без возбуждения и определяют величины, нужные для конечной опции систем подачи возбуждения. При остановке приводов с асинхронными движками инспектируют и подстраивают динамическое торможение и действие тормозов. Инспектируют состояние подшипников и нагрев мотора,
в) создают настройку конечных положений механизма при остановке привода, также настройку путных выключателей по диаграмме их работы с учетом определенных положений механизма по требованиям технологии,
г) создают настройку режимов запуска и реверса электропривода для регулируемых электроприводов и настройку систем возбуждения для синхронных электродвигателей.
13. Проверка работы электропривода под нагрузкой. Проверку создают в режиме, обеспечиваемом технологической установкой к моменту окончания наладочных работ.
14. Сдача электропривода во временную эксплуатацию. Сдачу оформляют актом либо записью в особом журнальчике. При всем этом заказчику передают протоколы измерения и тесты изоляции, проверки частей и цепей заземления, заносят в набор принципных схем заказчика произведенные в процессе наладки конфигурации.
15. Уточнение рабочих характеристик многофункциональных и защитных реле, автоматических выключателей, резисторов, уставки которых изменялись в процессе опробования электропривода. Эту работу делают для внесения в протоколы по наладочным работам фактических уставок.
16. Оформление технического отчета и сдача электропривода в эксплуатацию по акту. Технический отчет по наладке электропривода должен состоять из последующих разделов: инструкции, содержания томов технического отчета по всему объекту, содержания данного тома технического отчета, объяснительной записки, протоколов наладки, исполнительных чертежей.
Зависимо от трудности налаживаемых электроприводов объяснительную записку можно и не оформлять. В объяснительной записке доказывают выполненные в процессе наладки конфигурации схем, приводят осциллограммы работы регулируемых электроприводов, ссылки на документы, на основании которых настраивались защиты, и другие материалы, которые могут быть полезны для эксплуатации электроприводов и обобщения опыта наладочных работ.
В протоколах наладки должны быть представлены все сведения по измерениям, испытаниям, опробованиям, проведенным в согласовании с действующими директивными документами, инструкциями заводов-изготовителей и требованиями ПУЭ.
Приведенная программка работ для электроприводов переменного тока с контакторно-релейными схемами управления является общей и для регулируемых электроприводов и заходит в программку их наладки как составная часть.
Школа для электрика

elektrica.info