Формирование пусковых характеристик двигателей с фазным ротором проводится путём введения в цепь ротора дополнительного активного сопротивления и уменьшения его по мере разгона двигателя (уменьшения скольжения).
В короткозамкнутых асинхронных двигателях введение дополнительного сопротивления в цепь ротора невозможно. Однако тот же результат может быть получен, если воспользоваться эффектом вытеснения тока на поверхность проводника. Сущность этогоявления состоит в следующем. Согласно закону электромагнитной индукции при протекании по проводнику переменного тока в нём индуцируется ЭДС самоиндукции, направленная навстречу току
 = -
= -  = -L
= -L  = -L 10
= -L 10 

Где L– индуктивность проводника
 - амплитудное значение тока
- амплитудное значение тока
Значение этой ЭДС зависит от значения тока  , его частоты и индуктивности, определяемой характеристикой среды, окружающей проводник. Если проводник находится на воздухе, то магнитная проницаемость среды будет очень мала, следовательно, мала индуктивностьL. В этом случае изменение частоты 50Гц(
, его частоты и индуктивности, определяемой характеристикой среды, окружающей проводник. Если проводник находится на воздухе, то магнитная проницаемость среды будет очень мала, следовательно, мала индуктивностьL. В этом случае изменение частоты 50Гц( влияние ЭДС самоиндукции незначительно. Если проводник помещён в тело магнитопровода, индуктивность многократно увеличивается и ЭДС самоиндукции, направленная навстречу тока, играет роль индуктивного сопротивления, препятствующего протеканию тока.
влияние ЭДС самоиндукции незначительно. Если проводник помещён в тело магнитопровода, индуктивность многократно увеличивается и ЭДС самоиндукции, направленная навстречу тока, играет роль индуктивного сопротивления, препятствующего протеканию тока.
Рассмотрим проявление действия ЭДС самоиндукции для случая проводника (стержня обмотки ротора), помещённого в глубокий паз магнитопровода ротора двигателя (рис.).

Условно разделим сечение стержня на три части, которые соединим параллельно. Ток, протекающий по нижней части стержня, образует поток  , магнитные силовые линии которого замыкаются по магнитопроводу. В этой части проводника возникает ЭДС самоиндукции
, магнитные силовые линии которого замыкаются по магнитопроводу. В этой части проводника возникает ЭДС самоиндукции , большого значения, направленная навстречу току
, большого значения, направленная навстречу току . Ток
. Ток , протекающий по верхней части стержня роторной обмотки, образует потом
, протекающий по верхней части стержня роторной обмотки, образует потом , но т.к. силовые линии этого потока в значительной части своей длины замыкаются по воздуху, то поток
, но т.к. силовые линии этого потока в значительной части своей длины замыкаются по воздуху, то поток будет гораздо меньше потока
будет гораздо меньше потока . Следовательно, ЭДС
. Следовательно, ЭДС будет во много раз меньше, чем
будет во много раз меньше, чем .
.
Указанное распределение ЭДС самоиндукции по высоте стрежня характерно для того режима, при котором частота тока ротора близка к 50Гц. В этом случае, поскольку все три части стержня ротора соединены параллельно (рис.), то ток ротора  пойдёт по верхней части стержня.
пойдёт по верхней части стержня.

Это явление называют вытеснением тока на поверхность паза. При этом эффективное сечение стержня, по которому идёт ток, будет в несколько раз меньше, чем общее сечение стержня обмотки ротора. Таким образом, увеличивается активное сопротивление ротора  . Поскольку ЭДС самоиндукции зависит от частоты тока (т.е. от скольжения), то и сопротивление
. Поскольку ЭДС самоиндукции зависит от частоты тока (т.е. от скольжения), то и сопротивление и
и являются функциями скольжения.
являются функциями скольжения.
При пуске, когда скольжение велико(S=1), сопротивление увеличивается (в цепь ротора как бы вводится добавочный резистор). По мере разгона двигателя скольжение двигателя уменьшается, эффект вытеснения тока ослабевает, появляется сначала ток
увеличивается (в цепь ротора как бы вводится добавочный резистор). По мере разгона двигателя скольжение двигателя уменьшается, эффект вытеснения тока ослабевает, появляется сначала ток , затем
, затем , т.е. ток начинает распространятся вниз по сечению проводника, сопротивление
, т.е. ток начинает распространятся вниз по сечению проводника, сопротивление уменьшается. При достижении рабочей скорости частота тока настолько мала, что явление вытеснения тока уже не сказывается, ток протекает по всему сечению проводника и сопротивление
уменьшается. При достижении рабочей скорости частота тока настолько мала, что явление вытеснения тока уже не сказывается, ток протекает по всему сечению проводника и сопротивление минимально. Благодаря такому автоматическому изменению сопротивления
минимально. Благодаря такому автоматическому изменению сопротивления асинхронных короткозамкнутых двигателей протекает благоприятно: пусковой ток составляет 5.0-6.0 номинального, а пусковой момент 1.1-1.3 номинального.
асинхронных короткозамкнутых двигателей протекает благоприятно: пусковой ток составляет 5.0-6.0 номинального, а пусковой момент 1.1-1.3 номинального.
Варьировать параметры пусковой характеристики асинхронного двигателя при конструировании можно, меняя форму паза, а также сопротивление материала стержней (состав сплава).
Наряду с глубокими пазами применяют двойные пазы, образующие двойную “беличью клетку”, пазы грушевидной формы

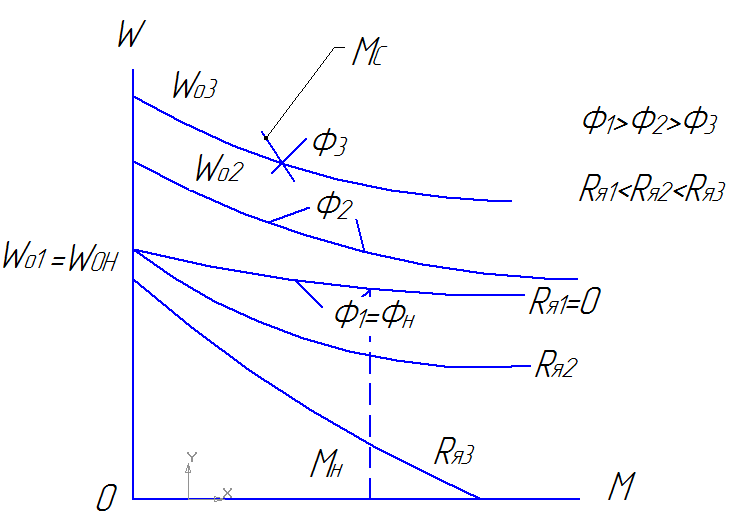
На рисунке представлены примерные механические характеристики для серий асинхронных короткозамкнутых двигателей.

1 - нормального исполнения
2 - с повышенным пусковым моментом
3 - с повышенным скольжением
4 - краново-металлургических серий
Короткозамкнутый двигатель нормального исполнения используют для привода широкого класса рабочих машин и механизмов, прежде всего для приводов, работающих в длительном режиме. Для этого исполнения характерны высокий КПД и минимальное номинальное скольжение. Механическая характеристика в области больших скольжений имеет обычно небольшой провал, характеризуемый минимальным моментом  .
.
Двигатели с повышенным скольжением имеют более “мягкую” механическую характеристику и используются, когда два или более двигателей работают на общий вал (для кривошипно-шатунных механизмов) с циклически изменяющейся нагрузкой, когда для преодоления сопротивления движению целесообразно использовать кинетическую энергию, запасаемую в движущихся частях электропривода для механизмов, работающих в повторно-кратковременном режиме.
Двигатели с повышенным пусковым моментом предназначены для механизмов с тяжёлыми условиями пуска (скребковые конвейеры). Двигатели краново-металлургических серий предназначены для механизмов, работающих в повторно-кратковременном режиме с частыми пусками. Эти двигатели имеют большую перегрузочную способность, высокий пусковой момент, чем у двигателей нормального исполнения.
Приближённо механическую характеристику короткозамкнутого двигателя можно построить по четырём точкам: при холостом ходе (S=0), при максимальном ( ), пусковом (
), пусковом ( ) и минимальном (
) и минимальном ( ) моментах. Данные этих характерных точек приводятся в каталогах и справочниках для асинхронных двигателей. Расчёт рабочей части технической характеристики (S=0 доSk) можно проводить по формуле (5) или если пренебречьr1 (для двигателей мощности более 15кВт)
) моментах. Данные этих характерных точек приводятся в каталогах и справочниках для асинхронных двигателей. Расчёт рабочей части технической характеристики (S=0 доSk) можно проводить по формуле (5) или если пренебречьr1 (для двигателей мощности более 15кВт)

 или
или  =
= (
( )
)
Где  - номинальное скольжение или
- номинальное скольжение или
Л 4-5. Регулирование координат электропривода.
При управлении движением исполнительных органов технологических установок с помощью электропривода обеспечивается регулирование одной или нескольких координат движения, главная из которых (основная выходная величина) – это угловая скорость на выходе ЭП, т.к. от её значения прямопропорционально зависит производительность технологических установок. Другие координаты чаще вспомогательные – это вращающий момент электродвигателя, ускорения, путь… Процесс принудительного изменения или поддержания на заданном уровне угловой скорости ЭП при изменяющихся внешних воздействиях называют регулированием угловой скорости.
Способы регулирования угловой скорости ЭП.
Регулирование возможно механическими и электрическими способами.
Механические способырегулирования заключаются в изменении угловой или линейной скорости исполнительных органов изменением передаточного числа устройства механической передачи (редуктора), путём применения различных коробок перемены передач, механических вариаторов.
Электрические способырегулирования заключаются в изменении угловой скорости ЭП с помощью устройства управления посредством преобразовательного и передаточного устройств. Энергетические способы прогрессивней, т.к. снижают металлоёмкость технологических установок, компактность, надёжность с повышением уровня автоматизации и качества управления техническими процессами.
Показатели.Основные показатели, характеризующие процесс регулирования угловой скорости ЭП:
диапазон регулирования,
плавность регулирования,
стабильность заданной угловой скорости,
направления регулирования,
допустимая нагрузка на разных угловых скоростях и экономичность регулирования.
Диапазон регулированияугловой скорости определяется отношением максимально возможной угловой скорости ЭП к минимальной
к минимальной при допустимых пределах её колебания с изменением нагрузки:D=
при допустимых пределах её колебания с изменением нагрузки:D= Обычно выражается как 2/1, 10/1, 100/1
Обычно выражается как 2/1, 10/1, 100/1
Плавность регулированияугловой скорости характеризуется отношением двух ближайших соседних угловых скоростей и
и при переменной нагрузке ЭП и численно оценивается коэффициентом плавности регулирования
при переменной нагрузке ЭП и численно оценивается коэффициентом плавности регулирования =
= . При плавном регулировании частоты вращения ЭП этот коэффициент изменяется к единице.
. При плавном регулировании частоты вращения ЭП этот коэффициент изменяется к единице.
Стабильность угловой скорости ЭП определяется жёсткостью механической характеристики электродвигателя и диапазоном изменения нагрузки на его валу. Чем больше жёсткая механическая характеристика двигателя и меньший диапазон колебания нагрузки на его валу, тем стабильнее угловая скорость ЭП, которая численно оценивается её отклонением от заданного значения, При абсолютно жёсткой характеристике механической – синхронного двигателя и допустимых нагрузках ЭП значение
от заданного значения, При абсолютно жёсткой характеристике механической – синхронного двигателя и допустимых нагрузках ЭП значение
Направление регулирования угловой скорости ЭП, т.е. увеличение или уменьшение её по отношению к номинальной , зависит от принятого способа регулирования. Направленный ввод добавочных сопротивлений в силовой цепи электродвигателя, понижает жесткость их механических характеристик, и их угловая скорость при наличии нагрузки на валу понижается. С другой стороны уменьшение тока возбуждения и соответственно уменьшения магнитного потока ДПТ приводящий к увеличению угловой скорости.
, зависит от принятого способа регулирования. Направленный ввод добавочных сопротивлений в силовой цепи электродвигателя, понижает жесткость их механических характеристик, и их угловая скорость при наличии нагрузки на валу понижается. С другой стороны уменьшение тока возбуждения и соответственно уменьшения магнитного потока ДПТ приводящий к увеличению угловой скорости.
Допустимая нагрузкана валу ЭД при разных угловых скоростях его вращения определяется принятым способом регулирования скорости ЭП. Выделяют регулирование при постоянном моменте М=constи при постоянной мощности Р=const. Регулирование скорости ЭП при постоянном моменте М=constцелесообразно для производственных механизмов, создающих на валу ЭД постоянный момент нагрузки, независящий от угловой скорости механизма. Это все грузоподъемные и большинство транспортирующих механизмов,
Регулирование угловой скорости ЭП при постоянной мощности Р. = constнаиболее оправданно для ЭП главного привода металлорежущих станков. В этих случаях изменением угловой скорости ЭП сила тока ЭД при всех угловых скоростях остается практически неизменной.
Экономичность регулированияугловой скорости ЭП определяется средними значениями энергетических показателей
 , рассчитанными за определенный период работы ЭП с данными угловыми скоростями.
, рассчитанными за определенный период работы ЭП с данными угловыми скоростями.

 =
= 
Где  и
и  - соответственно полезная (на выходном валу) и потребляемая из сети активная мощность ЭП наi– и ступени регулирования, Вт
- соответственно полезная (на выходном валу) и потребляемая из сети активная мощность ЭП наi– и ступени регулирования, Вт
 - потеря активной мощности на регулирование угловой скорости при работе ЭП i– и ступени регулирования, Вт.
- потеря активной мощности на регулирование угловой скорости при работе ЭП i– и ступени регулирования, Вт.
 –продолжительность работы на i– и ступени регулирования, с
–продолжительность работы на i– и ступени регулирования, с
 –потребляемая из сети активная мощность на i– и ступени регулирования, вар.
–потребляемая из сети активная мощность на i– и ступени регулирования, вар.
Любой процесс электрического регулирования координат ЭП всегда связан с получением искусственных (регулировочных) характеристик двигателя ЭП. Этого достигают на уровне разомкнутых либо замкнутых систем регулируемого ЭП.
Разомкнутые системы регулируемого ЭП.
Разомкнутая система регулируемого ЭП характеризуется тем что на ее вход не подается информация о текущем состоянии выходной величины (например, угловой скорости).

Функциональная схема разомкнутой системой регулируемого ЭП
 –сигнал управления, yy– устройство управления, Прб – преобразователь.
–сигнал управления, yy– устройство управления, Прб – преобразователь.
Поэтому все внешние возмущения в виде, например, изменения момента нагрузки, напряжения питания влияют на выходную координату ЭП, снижая тем самым стабильность её поддержания. По этой причине разомкнутые системы регулируемого ЭП, отличаясь простотой реализацией нашли в основном применение для обеспечения автоматического пуска, то торможения или реверса ЭП, а также в тех случаях, когда не предъявляют повышенные тех. требования к стабильности выходной координаты ЭП.
В разомкнутых системах регулируемого ЭП механическая характеристика и приводные свойства ЭП полностью определяются типом используемого ЭД и принятыми для него параметрами регулирования.
Так для асинхронного ЭП такие параметры (способы) взаимодействия на угловую скорость двигателя – эта частота напряжения (тока) питания, число полюсов обмотки статора, скольжение.
Способ частотного регулирования.
Этот способ экономичный, обеспечивает плавное регулирование частоты вращения (угловой скорости) в широком диапазоне с высокой стабильностью даже в разомкнутых системах из-за высокой жёсткости механической характеристики АД в её рабочей части. При частотном регулировании в состав асинхронного ЭП входит управляемый преобразователь частоты, который обеспечивает заданное изменение частоты и соответствующий этой частоте уровень питающего напряжения АД. Изменять значение напряжения питания АД при изменении частоты необходимо, т.к. значение индуктивного сопротивления двигателя, а значит, и его ток зависят от частоты. При этом для сохранения неизменной перегрузочной способности двигателя (Мк/Мс= const) и высоких энергетических показателей на всех частотах вращения. Закон частотного регулирования АД, предложенный академиком М.П.Костенко, записывают ввиде соотношения:

Где  ,
, ,
, номинальное значение напряжения, частоты и момента статической нагрузки на валу АД при номинальной частоте вращения.
номинальное значение напряжения, частоты и момента статической нагрузки на валу АД при номинальной частоте вращения.
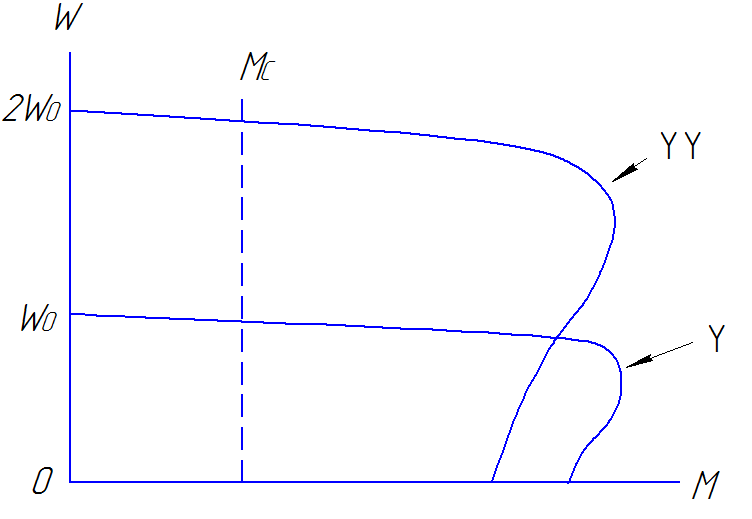
U,f,Mc– те же значения, но при частоте вращения АД, отличной от номинального на рис. Представлены механические характеристики при регулировании по указанному закону частотно регулируемого асинхронного ЭП.
Частотное регулирование угловой скорости

Способ поточного переключения.
Способ поточного переключения обмотки статора используется в многоскоростных АД, которые имеют обмотку статора с изменяемым числом полюсов. Регулирование, как и частотное, экономичное, его широко применяют для ступенчатого изменения частоты вращения (угловой скорости) АД с КЗ ротора. Так как количество пар полюсов АД может быть равным только по целому числу 1, 2, 3 и т.д., то данный способ обеспечивает только ступенчатое регулирование частоты вращения асинхронного ЭП. Чаще всего изменение
числа пар юсов обмотки статора АД получают путём изменения схемы обмотки. Для этого каждая фаза обмотки статора разделена на несколько секций и имеет от них соответствующее число видов. Изменяя схему соединения этих секций статорной обмотки во всех фазах, добиваются различных частот вращения магнитного поля статора, а соответственно и часто вращения ротора АД.
На рисунке показан принцип изменения числа пар полюсов. На примере одной фазы двухскоростного АД.
Стрелками показано условное направление протекания токов в секциях обмотки, а кружками – соответствующее направление магнитных силовых линий в соответствии с правилом “буравчика”.

В двух скоростном АД каждая фаза обмотки статора состоит из двух одинаковых секций (катушечных групп). Если секции соединить последовательно, то образуется максимальное число пар полюсов, условно равная 2р, которому соответствует угловая скорость магнитного поля  (а). При соединении этих же секций встречно последовательно (б) или параллельно (в) количество пар полюсов уменьшается в двое и равно р, а синхронная угловая скорость увеличивается в 2 раза (2
(а). При соединении этих же секций встречно последовательно (б) или параллельно (в) количество пар полюсов уменьшается в двое и равно р, а синхронная угловая скорость увеличивается в 2 раза (2 ).
).
Наиболее распространенные и целесообразные схемы переключения статорной обмотки двух скоростных АД для основных видов нагрузки ЭП показаны на рисунке


Т.к. P=M то т.к
то т.к в 2р М
в 2р М 2р нагрузка вентиляторная или линейная
2р нагрузка вентиляторная или линейная



Переключение для главного привода металлорежущих станков



Существенный недостаток многоскоростных АД помимо ступенчатого регулирования угловой скорости – повышенная сложность обмотки статора и сложность ее подключения и коммутации. Например, даже у двух скоростных АД количество выводов обмотки статоров равно 12 , у четырех скоростных – 24 .
Способ изменения скольжения
Изменением скольжения можно регулировать частоту вращения асинхронного ЭП, если на валу двигателя имеется нагрузка и АД обладает мягкой механической характеристикой.
Наиболее доступно этот способ реализуется при использовании АД с фазным ротором путем изменения сопротивления трех фазного реостата, включенного во внешнюю цепь обмотки ротора.
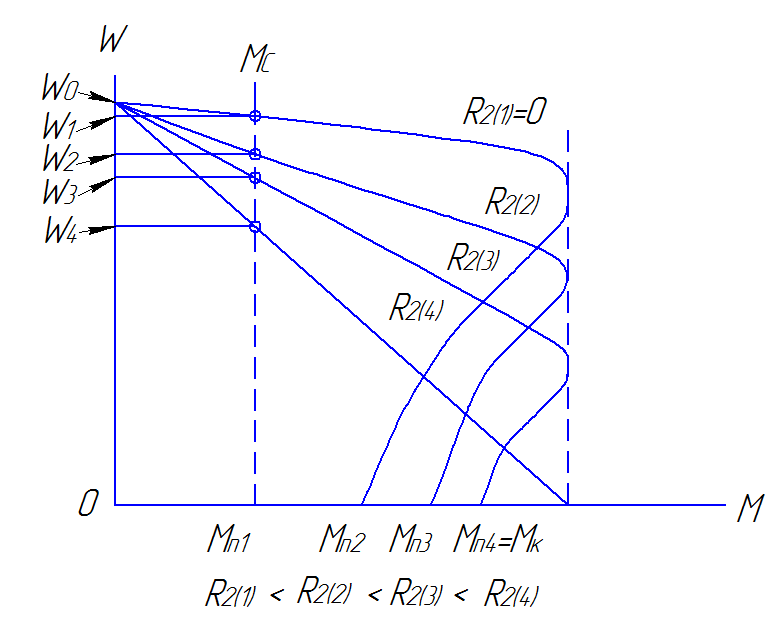
Механическая характеристика
Для АД с КЗ ротором регулирования угловой скорости изменением скольжения регулируется в случае применения специальных АД с мягкой механической характеристикой путем регулирования напряжения питания двигателя.
Способ регулирования частоты вращения АД изменением скольжения характеризуется повышенными потерями мощности, т.к. с увеличением скольжения S растут потери мощности Рэл2 обмотки ротора АД, вызывая ее дополнительный нагрев


 –момент нагрузки на валу АД Нм
–момент нагрузки на валу АД Нм
 -угловая скорость магнитного поля статор рад/с
-угловая скорость магнитного поля статор рад/с
При глубоком регулировании потери мощности в цепи ротора АД становятся преобладающими и КПД двигателя  практически полностью определяется скольжением
практически полностью определяется скольжением

Вместе с тем, данный способ нашел широкое применение в виду доступности и высокой плавности регулирования прежде всего для асинхронных ЭП с вентиляторной нагрузкой. В этом случае с понижением угловой скорости (с увеличением скольжения) существенно уменьшается и момент нагрузки на валу АД, чем обеспечивается достаточное постоянство потерь мощности в роторе и более полное использование АД по нагреву на всех частотах вращения. Диапазон регулирования до 10 :1 и соответственно в таком же диапазоне достигается плавное изменение производительности технологических установок (вентилятора).
Регулирование угловой скорости для ЭП с коллекторными двигателями (ДПТ)
Регулирование их угловой скорости возможно изменением: сопротивления в цепи якоря (параметрическое управление), магнитного потока двигателя (полюсное управление) и напряжения питания цепи якоря(якорное управление).
Двигатели постоянного тока могут иметь независимое, последовательное или смешанное возбуждение
Схема включения независимого (параллельного возбуждения)

Eя=k
K=
 механическая характеристика привода
механическая характеристика привода


При введении добавочного резистора в цепь якоря скорость холостого хода  останется не изменой, а изменяется наклон механических характеристик , т.е. уменьшается их жесткость. Данный способ регулирования скорости в настоящее время не используется, поскольку введение добавочного резистора сопряжено с потерями энергии в этом сопротивлении
останется не изменой, а изменяется наклон механических характеристик , т.е. уменьшается их жесткость. Данный способ регулирования скорости в настоящее время не используется, поскольку введение добавочного резистора сопряжено с потерями энергии в этом сопротивлении

Основным способом регулирования скорости ДПТ – НВ является регулирование напряжения, подводимого к якорю двигателя. При этом скорость лишь уменьшить по сравнению с номинальной, определяемой естественной характеристикой. При уменьшении напряжения якоря уменьшается скорость холостого хода , а жесткость механической характеристики остается постоянной. Повышение напряжения питания выше номинальной не рекомендуется, т.к. это может ухудшить коммутацию на якоре.
, а жесткость механической характеристики остается постоянной. Повышение напряжения питания выше номинальной не рекомендуется, т.к. это может ухудшить коммутацию на якоре.

При постоянном потоке возбуждения
Повышение скорости по сравнению с номинальной проводится уменьшением тока (потока) возбуждения. При уменьшении магнитного потока 
 происходит увеличение скорости х.х.
происходит увеличение скорости х.х. и одновременно снижается жесткость механических характеристик двигателя
и одновременно снижается жесткость механических характеристик двигателя выше
выше нецелесообразно, т.к. магнитная цепь машины насыщается возрастание магнитного потока не будет существенно, а тепловой режим нарушится.
нецелесообразно, т.к. магнитная цепь машины насыщается возрастание магнитного потока не будет существенно, а тепловой режим нарушится.

Если Мстат =Мн то при  двигатель будет работать в т. 1.
двигатель будет работать в т. 1.
Если ослабить поток возбуждения в 2 раза то скорость х.х  увеличится в 2 раза.
увеличится в 2 раза.
Мощность на валу постоянна – это преимущество
Если момент двигателя сохраняется постоянным и равным номинальному двигатель будет работать в т. 4.
Однако M= ток якоря при этом увеличится в 2 раза. По этому длит. работа в т. 4 недопустима. Линия номинального момента при ослаблении поля отображается кривой
ток якоря при этом увеличится в 2 раза. По этому длит. работа в т. 4 недопустима. Линия номинального момента при ослаблении поля отображается кривой
1-2-3.
Двигатели постоянного тока последовательного и смешанного возбуждения.

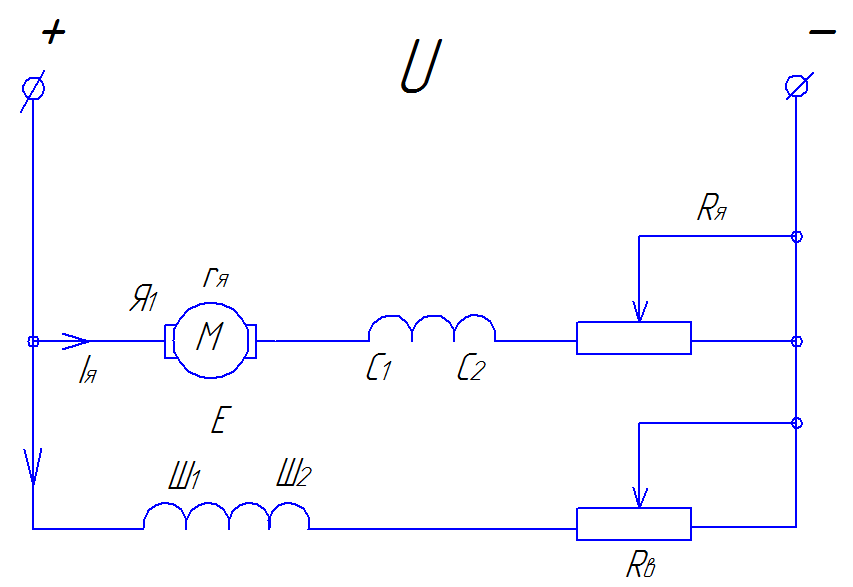
Последовательное возбуждение  , где а=f(Iя) – нелинейный коэффициент.
, где а=f(Iя) – нелинейный коэффициент.
При малых токах якоря а – величина постоянная при  - двигатель насыщается и поток мало зависит от тока якоря.
- двигатель насыщается и поток мало зависит от тока якоря.

Наиболее экономичным изменение Uподв.

Характеристики смещаются в низ по мере  Uпараллельно естественной характеристике.
Uпараллельно естественной характеристике.
Изменение потока вращения в этих двигателях возможно, если зашунтировать обмотку якоря резистором с сопротивлением Rш, тогда ток возбуждения , т.е.содержит постоянную составляющую независимую от нагрузки двигателя.
, т.е.содержит постоянную составляющую независимую от нагрузки двигателя.
При этом двигатель приобретает свойство двигателя смешанного возбуждения


Двигатель смешенного возбуждения механические характеристики.
studfiles.net
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ПРИБОРОСТРОЕНИЯ И ИНФОРМАТИКИ
С.А. Микаева
Трехфазный двигатель с короткозамкнутым ротором и соединением
обмоток типа «Звезда»
УЧЕБНО-МЕТОДИЧЕСКОЕ ПОСОБИЕ
Москва 2011
УДК
ББК
Рекомендовано к изданию в качестве учебно-методического пособия редакционно-издательским советом МГУПИ
Рецензенты:
Д.т.н., профессор – Филинов В.В. (МГУПИ)
ст. преподаватель – Щеглов В.А. (МГУПИ)
Микаева С.А.
Трехфазный двигатель с короткозамкнутым ротором и соединением обмоток типа «Звезда»: учебно-методическое пособие. - М.: МГУПИ, 2011.- 25 с.
Рассматриваются вопросы устройства, принципа действия, рабочие и механические характеристики асинхронного двигателя.
Учебно-методическое пособие предназначено для специалистов в области приборостроения и радиоэлектроники, инженерно-технических и научных работников, занятых разработкой, производством и применением электрических машин, а также студентов специальности «Приборостроения и радиоэлектроники (ПР)».
Цель работы:
Ознакомиться с устройством, принципом действия трехфазного двигателя с короткозамкнутым ротором и соединением обмоток типа «Звезда», овладеть навыками работы с электрическими машинами. Снять основные характеристики двигателя.
Требуемое оборудование:
Модульный учебный комплекс МУК-ЭП1
Двигатель предназначен для преобразования электрической энергии в механическую с целью приведения в действие исполнительного механизма.
Генератор предназначен для преобразования механической энергии в электрическую с целью питания различных электрических устройств.
Любая электрическая машина (генератор, двигатель) имеет две основные части: неподвижный статор и вращающийся ротор, которые содержат магнитопровод и обмотки. В машинах постоянного тока ротор называется якорем (Я), а обмотка статора называется обмоткой возбуждения (ОВ).
Асинхронный двигатель предназначен для преобразования электрической энергии 3-х фазного переменного тока в механическую энергию. Асинхронный двигатель (рис. 1а.) состоит из двух основных частей: неподвижной - статора и вращающейся - ротора.
Статор (рис. 1б.) представляет собой полый цилиндр, составленный из изолированных листов электротехнической стали в форме колец, со штампованными пазами с внутренней стороны, в которые укладывается 3-х фазная статорная обмотка, оси которых смещены относительно друг друга на 120°, 60°, 40° в зависимости от количества катушек.
Ротор представляет собой также цилиндр, составленный из листовой электротехнической стали в форме колец, с пазами на их внешней поверхности, в которые укладывается роторная обмотка. В зависимости от ее устройства различают:
1) короткозамкнутый ротор (рис. 1в.) - обмотка короткозамкнутого ротора (рис. 1г.) выполняется в виде беличьего колеса и состоит из уложенных в пазы неизолированных стержней, которые по обеим сторонам замыкаются на кольца;
2) фазный ротор (ротор с контактными кольцами) (рис. 1д.) - обмотка фазного ротора 1 выполняется 3-х фазной, концы которой выводятся на контактные кольца 2 и подключаются к 3-х фазному реостату.
а)  б)
б) 
в) г)
г) д)
д) 
Рис. 1.
В большинстве случаев используется двигатель с короткозамкнутым ротором, как более простой и компактный. Двигатель с фазным ротором используется в тяжелых пусковых условиях, в частности в подъемных устройствах, а также в исполнительных механизмах, использующих широкий диапазон частот вращения.
Обмотки статора соединяются «звездой» или «треугольником» и включаются в сеть 3-х фазного тока. В результате в них потекут 3-х фазные токи, которые создадут вращающееся магнитное поле.
Магнитные линии вращающегося магнитного поля статора пересекают проводники ротора и индуцируют в них электродвижущую силу (ЭДС), а так как обмотка ротора замкнута, то в ее проводниках возникают токи.
Взаимодействие вращающегося магнитного потока с токами ротора создает электромагнитный вращающий момент МВР вращающий ротор двигателя.
Под действием этого момента ротор начинает вращаться в том же направлении, что и поле Ф. Скорость вращения ротора n2 всегда меньше скорости вращения поля n1, так как только в этом случае возможно индуцирование тока в проводниках обмотки ротора и возникновение вращающегося момента.
Скорость вращающегося магнитного поля n1 определяется как
n1 =  , (1)
, (1)
где p - число пар полюсов вращающегося магнитного поля;
ƒ - частота тока статора.
Разность (n1–n2) называется скоростью скольжения, а отношение этой скорости к скорости вращения магнитного поля называется скольжением:
s= (2)
(2)
или
 =
= * 100% (3)
* 100% (3)
где n2 - скорость вращения ротора.
Скольжение характеризует степень отставания скорости вращения ротора от скорости вращения поля. При номинальной нагрузке скольжение у двигателей в среднем составляет 1,5-5%.
studfiles.net
ИССЛЕДОВАНИЕ
ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ
С КОРОТКОЗАМКНУТЫМ РОТОРОМ
Цель работы: изучить устройство и принцип действия асинхронного двигателя; ознакомиться с процессами пуска, остановки и реверсирования; исследовать работу двигателя при различных значениях питающего напряжения и соединении фаз обмотки статора звездой и треугольником.
ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
Назначение, устройство и принцип действия
трехфазного асинхронного двигателя
Трехфазные асинхронные двигатели применяются:
- в нерегулируемых электроприводах насосов, вентиляторов, компрессоров, нагнетателей, дымососов, транспортеров, автоматических линий, кузнечно-штамповочных машин и др.;
- в регулируемых электроприводах металлорежущих станков, манипуляторов, роботов, грузоподъемных механизмов, общепромышленных механизмов с изменяющейся производительностью и др.
Трёхфазный асинхронный двигатель с короткозамкнутым ротором состоит из двух основных частей: неподвижной - статора и вращающейся – ротора.
Основные части статора 1 (рис. 4.1): станина, сердечник и его обмотка. Сердечник статора имеет форму полого цилиндра (рис. 4.2). Для уменьшения потерь энергии от вихревых токов он набирается из отдельных, изолированных друг от друга лаковой пленкой листов электротехнической стали. На внутренней поверхности сердечника расположены пазы, в которые укладывается обмотка статора (рис. 4.1). Сердечник запрессован в корпус (станину) 7 (рис. 4.1), изготовляемый из чугуна или сплава алюминия.


Рис. 4.1
1 – статор; 2 – ротор; 3 – подшипниковые щиты;
4 – вентилятор; 5 – отверстия для входа и выхода охлаждающего воздуха; 6 – коробка, прикрывающая зажимы; 7 - корпус

Рис. 4.2 Рис. 4.3
У двигателя с одной парой полюсов обмотка статора выполняется из трех одинаковых катушек, называемых фазами. Каждая фаза обмотки укладывается в противоположные пазы сердечника статора, фазы обмотки сдвинуты в пространстве друг относительно друга на угол  и соединены между собой по особым правилам.
и соединены между собой по особым правилам.
Ротор 2 (рис. 4.1) состоит из сердечника и короткозамкнутой обмотки. Сердечник ротора набирается также из листов электротехнической стали и крепится на валу двигателя.
В пазы на поверхности сердечника, укладываются неизолированные медные или алюминиевые стержни 1 (рис. 4.3), которые по торцам замыкаются кольцами 2 (рис. 4.3), образуя короткозамкнутую обмотку ротора, называемую «беличьим колесом».
Для охлаждения двигателя во время работы на валу устанавливается вентиляторное колесо или вентиляционные лопасти 4 (рис. 4.1), отливаемые из алюминия одновременно с обмоткой ротора (для двигателей малой и средней мощности).
Вал вращается в подшипниках, укрепленных в боковых щитах 3 (рис. 4.1), называемых подшипниковыми щитами. Подшипниковые щиты крепятся к корпусу 7 (рис. 4.1) при помощи болтов.
Принцип действия асинхронного двигателя основан на двух явлениях: образовании вращающегося магнитного поля токами обмотки статора и воздействии этого поля на токи, индуцированные в короткозамкнутых витках обмотки ротора.
studfiles.net
ИССЛЕДОВАНИЕ АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ
Методические указания
Самара
Самарский государственный технический университет
Печатается по решению Редакционно-издательского совета
СамГТУ
УДК 621.313
Исследование асинхронного двигателя с короткозамкнутым ротором: метод.указ. / Сост. Ю.В.Зубков. – Самара; Самар. гос. техн. ун-т, 2008. - 44с.: ил.
Содержат практические рекомендации по экспериментальному определению рабочих и механических характеристик асинхронных двигателей с короткозамкнутым ротором, а также контрольные вопросы, указания по обработке экспериментальных данных.
Составлены в соответствии с рабочей программой по курсам «Электрические машины», «Электромеханика», «Конструкция, расчет, проектирование, потребительские свойства ЭМУ и ЭМП» для студентов специальностей 140203, 140204, 140205, 140211, 140601, 140604, 140605,140608.
Предназначены для студентов и преподавателей университета.
Составитель канд. техн. наук Ю.В. Зубков
Рецензент канд. техн. наук Ю.А. Макаричев
Ó Ю.В.Зубков, составление, 2008
Ó Самарский государственный
технический университет, 2008
ВВЕДЕНИЕ
Асинхронные двигатели с короткозамкнутым ротором составляют около 80% всего парка электрических двигателей, применяемых в промышленности, благодаря простоте конструкции и обслуживания, невысокой стоимости. Изучение потребительских свойств, эксплуатационных характеристик таких двигателей является актуальной задачей.
Целью учебных лабораторных испытаний является более глубокое изучение студентами вопросов теории электромеханического преобразования энергии, ознакомление с конструкцией электрических машин и их основными характеристиками, приобретение практических навыков экспериментальных исследований и обработки опытных данных.
Лабораторные работы рассчитаны на 4 часа аудиторных занятий по экспериментальному исследованию электрических машин и на 2...4 часа самостоятельной работы студентов по обработке и анализу полученных опытных данных.
Правила техники безопасности при работе в учебной лаборатории
Перед началом работ в лаборатории все студенты обязаны ознакомиться с правилами техники безопасности при работе с электротехническими установками и расписаться в соответствующем журнале, хранящемся у заведующего лабораторией.
При выполнении лабораторных работ по электрическим машинам следует помнить, что испытания проводятся при напряжениях до 250 В, а в некоторых случаях и выше. При неблагоприятных условиях опасные поражения электрическим током могут произойти даже при напряжении ниже 50 В, Поэтому во время работы студенты должны быть внимательны, дисциплинированны и строго соблюдать следующие требования техники безопасности.
1. Прежде чем приступить к выполнению лабораторной работы, все члены студенческой бригады должны обстоятельно ознакомиться с оборудованием лабораторной установки и устройством отдельных ее частей. Студенты обязаны знать номинальные данные исследуемых электрических машин и не допускать их превышения в ходе работы, за исключением случаев, оговоренных особо.
2. К сборке электрической схемы необходимо приступать толькопосле разрешения преподавателя, убедившись, что ни одна из частейустановки не находится под напряжением.
3. При обнаружении на лабораторном стенде неисправностейследует обратиться к дежурному лаборанту. Работа на неисправномстенде категорически запрещается.
4. Включение установки под напряжение разрешается только после проверки схемы и всей установки преподавателем.
5. В процессе выполнения лабораторной работы категорическизапрещается прикасаться к находящимся под напряжением оголенным токоведущим участкам схемы и вращающимся частям электрических машин.
6. Все необходимые переключения в схемах разрешается производить лишь при полном отключении напряжения.
7. Студентам запрещается делать какие-либо переключения наглавном распределительном щите и заходить за лабораторные стенды.
8. Если в ходе работы требуется сделать перерыв (для выполненияконтрольных расчетов, консультации с преподавателем, на отдых ит.д.), то напряжение со стенда должно быть полностью снято.
9. Категорически запрещается оставлять без присмотра даже накороткое время лабораторную установку, находящуюся под напряжением.
10. По окончании работы в первую очередь со стенда должнобыть снято напряжение. После утверждения преподавателем, полуученных экспериментальных данных, схема разбирается и рабочее место приводится в порядок.
Нарушение правил техники безопасности и поведения в лаборатории рассматривается как серьезное нарушение дисциплины.
Требования и рекомендации по подготовке к лабораторной работе и оформлению отчета
Перед каждой лабораторной работой студент должен самостоятельно, используя рекомендованную литературу и настоящее руководство, подготовиться и знать следующие основные вопросы:
- устройство и принцип действия исследуемой электрическоймашины;
- вид ее основных характеристик;
- назначение всех элементов испытуемой установки, их взаимодействие и обозначение на электрической схеме.
Перед началом занятий преподаватель проверяет устно, письменно или при помощи контролирующих устройств знания студентов и их готовность к выполнению предстоящей работы.
К каждому следующему занятию студент представляет отчет о предыдущей работе и защищает его.
Студент, не представивший отчет о предыдущей работе, к лабораторным занятиям не допускается.
Отчет выполняется каждым студентом индивидуально на стандартных листах формата А4 (287мм X 210 мм).
Отчет должен содержать:
1) титульный лист с названием работы, фамилией студента, указанием его факультета, курса и группы, фамилией проверяющегопреподавателя и т.д.;
2) программу работы;
3) номинальные данные исследуемых машин;
4) электрическую схему (схемы) установки, выполненную в соответствии с действующими стандартами;
5) таблицы экспериментальных и расчетных данных. Каждаятаблица должна иметь название и порядковый номер, в таблице обязательно должны быть указаны единицы измерения приведенных величин;
6) пример расчета данных, необходимых для построения графиков и диаграмм;
7) рисунки опытных и расчетных характеристик, выполненныена листах формата А4 с помощью графических редакторов или вручную. Рисунки должны сопровождаться названием, порядковым номером и необходимыми поясняющими надписями. На графиках должны быть четко проставлены все экспериментальные точки, имеющиеся в соответствующей таблице. Характеристики проводятся в виде плавных кривых таким образом, чтобы число «выпавших» экспериментальных точек по обе стороны кривой было примерно равным;
8) выводы по проделанной работе. В выводах должно быть в краткой форме сделано заключение по каждому из проделанных опытов и по каждой опытной и расчетной характеристике.
Теоретические сведения об асинхронном двигателе
С короткозамкнутым ротором
Конструкция АД с короткозамкнутым ротором упрощенно показана на рис.в1

Рис. в1
1 – корпус (станина), 2 – сердечник статора, 3 – обмотка статора, 4 – сердечник ротора, 5 – обмотка ротора, 6 – воздушный зазор, 7 – вентиляционные каналы, 8 – вал ротора.
Все трехфазные асинхронные двигатели имеют конструктивно одинаковые статоры и различаются выполнением обмотки ротора. По конструкции обмотки ротора эти двигатели подразделяются на два типа: с короткозамкнутой обмоткой (короткозамкнутые) и с фазной. Трехфазный двигатель предназначен для включения в трехфазную сеть, поэтому он имеет обмотку статора, состоящую из трех фазных обмоток, при прохождении через которые токи, поступающие из трех фаз сети, возбуждают вращающееся магнитное поле. Для усиления магнитного поля и придания ему необходимой формы сердечники собирают, из тонких листов электротехнической стали, изолированных друг от друга слоем лака.
К корпусу двигателя, который отливают из чугуна или стали, прикрепляют все остальные части двигателя. Сердечник статора имеет вид полого цилиндра с продольными пазами по внутренней поверхности.
В пазы укладываются три фазные обмотки, сдвинутые относительно друг друга на угол 120град. Внутри корпуса сердечник статора укрепляется с помощью прокладки из немагнитного материала для того, чтобы не допускать образования в нем магнитного поля и, следовательно, вихревых токов.
Частота вращения магнитного поля статора в об/мин определяется соотношением 
где  - число пар полюсов статора;
- число пар полюсов статора;  - частота питающего напряжения статора.
- частота питающего напряжения статора.
Тогда при питании двигателя от сети промышленной частоты = 50 Гц и =1 частота вращения поля статора равна  = 3000 об/мин. Для получения меньших частот вращения статоры выполняют с многополюсными обмотками ( > 1).
= 3000 об/мин. Для получения меньших частот вращения статоры выполняют с многополюсными обмотками ( > 1).
Короткозамкнутый ротор АД состоит из стального вала, цилиндрического сердечника, насажанного на вал ротора, короткозамкнутой обмотки и лопастей, осуществляющих вентиляцию машины. Сердечник ротора имеет вдоль поверхности продольные пазы, в которые укладывается обмотка, представляющая собой неизолированные медные или алюминиевые стержни, замкнутые накоротко на торцах ротора двумя торцевыми кольцами. Если эту обмотку мысленно вынуть из стального цилиндрического сердечника ротора, то она будет выглядеть как беличья клетка.
В асинхронных двигателях средней и малой мощности короткозамкнутую обмотку ротора получают путем заливки расплавленного алюминиевого сплава в продольные пазы сердечника. Вместе с обмоткой отливают также торцевые короткозамыкающие кольца и лопасти для вентиляции машины.
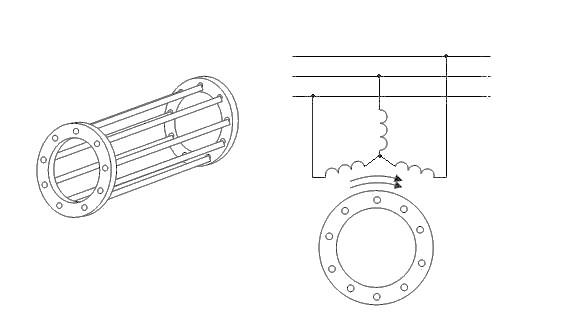
Рис. в2
В обмотке статора асинхронного двигателя при прохождении переменного тока возбуждается вращающееся магнитное поле, которое, пересекая проводники обмотки ротора, наводит в них переменную ЭДС. Так как обмотка ротора замкнута, то наведенная ЭДС вызывает в роторе ток. В результате взаимодействия проводников с током ротора и вращающегося магнитного поля возникает сила, заставляющая ротор вращаться в направлении вращения поля. Таким образом, принцип работы асинхронного двигателя основан на использовании взаимодействия вращающегося магнитного поля, создаваемого переменным током в обмотке статора и проводниками с током обмотки ротора. Так как вращение магнитного поля статора происходит асинхронно с вращением ротора двигателя, т. е. частота вращения ротора и поля отличается, двигатель называется асинхронным.
Цель работы – овладение практическими навыками экспериментального определения рабочих характеристик асинхронного двигателя с короткозамкнутым ротором и оценки потребительских свойств этого двигателя.
Программа работы
1. Изучить устройство и элементы конструкции двигателя.
2. Определить экспериментальным путем следующие характеристики двигателя: холостого хода, короткого замыкания, рабочие, механические.
3. Выполнить опыт «идеального» холостого хода.
4. Определить рабочую характеристику двигателя расчетным путем по электрической схеме замещения.
Исходные данные
Таблица 6.5
Задавшись несколькими величинами скольжения в диапазоне (0,1... 1,2)  , рассчитать:
, рассчитать:
полное сопротивление рабочей ветви Г- образной схемы замещения двигателя

активную составляющую тока обмотки статора

полный ток обмотки статора

коэффициент мощности

активную электрическую мощность, потребляемую двигателем из сети,
потери мощности в двигателе

полезную механическую мощность, развиваемую двигателем,
коэффициент полезного действия

частоту вращения ротора

Результаты расчетов оформить в виде таблицы 6.3. Построить рабочую характеристику и сравнить ее с характеристикой, определенной экспериментально. Привести пример расчета всех величин при номинальном скольжении.
7. Контрольные вопросы
1. Поясните последовательность операций, выполняемых при прямом способе пуска в ход асинхронного двигателя.
2. Как изменить направление вращения асинхронного двигателя?
3. Как опытным путем определить рабочую характеристику асинхронного двигателя?
4. Поясните ход графиков рабочей характеристики.
5. Kaк опытным путем определить характеристики холостого хода асинхронного двигателя?
6. Поясните ход характеристик холостого хода двигателя.
7. Как опытным путем определить характеристики короткого замыкания асинхронного двигателя?
8. Поясните ход характеристик короткого замыкания двигателя.
9. Чтo называется скольжением асинхронной машины и как его определить опытным путем? В каких пределах .изменяется скольжение асинхронного двигателя?
10. Как определить электрические потери в короткозамкнутой обмотке ротора?
11. Как определить КПД двигателя расчетным путем?
12. Опишите виды потерь мощности в асинхронном двигателе и как они зависят от нагрузки.
13. Вычертите Г-образную схему замещения асинхронного двигателя и поясните, как опытным путем определяются ее параметры.
Оглавление
Введение
Правила техники безопасности при работе в учебной лаборатории
Требования и рекомендации по подготовке к лабораторным работам
и составлению отчета
Теоретические сведения об асинхронном двигателе с короткозамкнутым ротором
1. Определение характеристик холостого хода трехфазного асинхронного двигателя с короткозамкнутым ротором
1.1. Электрические схемы соединений
1.2. Перечень аппаратуры
1.3. Описание электрической схемы соединений
1.4. Указания по проведению эксперимента
2. Определение характеристик короткого замыкания трехфазного асинхронного двигателя с короткозамкнутым ротором
2.1. Электрическая схема соединений
2.2. Перечень аппаратуры
2.3. Описание электрической схемы соединений
2.4. Указания по проведению эксперимента
3. Определение рабочих характеристик трехфазного асинхронного двигателя с короткозамкнутым ротором
3.1. Электрическая схема соединений
3.2. Перечень аппаратуры
3.3. Описание электрической схемы соединений
3.4. Указания по проведению эксперимента
4. Определение искусственной механической характеристики трехфазного асинхронного двигателя с короткозамкнутым ротором
4.1. Электрическая схема соединений
4.2. Перечень аппаратуры
4.3. Описание электрической схемы соединений
4.4. Указания по проведению эксперимента
5. Опыт «идеального» холостого хода асинхронного двигателя с короткозамкнутым ротором
5.1. Электрическая схема соединений
5.2. Перечень аппаратуры
5.3. Описание электрической схемы соединений
5.4. Указания по проведению эксперимента
6. Обработка результатов испытаний и оформление отчета
7. Контрольные вопросы
ИССЛЕДОВАНИЕ АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ
Методические указания
Самара
Самарский государственный технический университет
Печатается по решению Редакционно-издательского совета
СамГТУ
УДК 621.313
Исследование асинхронного двигателя с короткозамкнутым ротором: метод.указ. / Сост. Ю.В.Зубков. – Самара; Самар. гос. техн. ун-т, 2008. - 44с.: ил.
Содержат практические рекомендации по экспериментальному определению рабочих и механических характеристик асинхронных двигателей с короткозамкнутым ротором, а также контрольные вопросы, указания по обработке экспериментальных данных.
Составлены в соответствии с рабочей программой по курсам «Электрические машины», «Электромеханика», «Конструкция, расчет, проектирование, потребительские свойства ЭМУ и ЭМП» для студентов специальностей 140203, 140204, 140205, 140211, 140601, 140604, 140605,140608.
Предназначены для студентов и преподавателей университета.
Составитель канд. техн. наук Ю.В. Зубков
Рецензент канд. техн. наук Ю.А. Макаричев
Ó Ю.В.Зубков, составление, 2008
Ó Самарский государственный
технический университет, 2008
ВВЕДЕНИЕ
Асинхронные двигатели с короткозамкнутым ротором составляют около 80% всего парка электрических двигателей, применяемых в промышленности, благодаря простоте конструкции и обслуживания, невысокой стоимости. Изучение потребительских свойств, эксплуатационных характеристик таких двигателей является актуальной задачей.
Целью учебных лабораторных испытаний является более глубокое изучение студентами вопросов теории электромеханического преобразования энергии, ознакомление с конструкцией электрических машин и их основными характеристиками, приобретение практических навыков экспериментальных исследований и обработки опытных данных.
Лабораторные работы рассчитаны на 4 часа аудиторных занятий по экспериментальному исследованию электрических машин и на 2...4 часа самостоятельной работы студентов по обработке и анализу полученных опытных данных.
infopedia.su