Цель работы: ознакомиться с конструкцией асинхронного двигателя с фазным ротором. Изучить пуск, регулирование частоты вращения изменением скольжения, реверсирование. Снять пусковую диаграмму, рабочие, механические и регулировочную характеристики двигателя.
Асинхронный двигатель с фазным ротором (двигатель с контактными кольцами), принципиальная схема которого приведена на рис.1, состоит из двух частей: неподвижной части ― статора и вращающейся ― ротора.
Статор (рис.2) представляет собой станину (корпус) (1), выполненную из чугунного литья в виде цилиндрической отливки с лапами для крепления на фундаменте. Внутрь станины запрессован пакет (2), представляющий собой пустотелый цилиндр, набранный из отдельных, покрытых специальным изолирующим лаком, тонких листов электротехнической стали с выштампованными вдоль внутренней поверхности пазами (3).
В пазах уложена трехфазная обмотка статора, состоящая из трех одинаковых фазовых обмоток  , повернутых друг относительно друга вдоль окружности пакета статора на 120 электрических градусов. Начала обмоток
, повернутых друг относительно друга вдоль окружности пакета статора на 120 электрических градусов. Начала обмоток  и концы
и концы 
 выведены на щиток машины.
выведены на щиток машины.
Наличие шести выводов дает возможность соединять обмотки статора или по схеме «звезда» или по схеме «треугольник». К клеммам  подключается питающая двигатель трехфазная сеть. К торцам станины крепятся подшипниковые щиты, в центре которых расположены шариковые подшипники вала ротора.
подключается питающая двигатель трехфазная сеть. К торцам станины крепятся подшипниковые щиты, в центре которых расположены шариковые подшипники вала ротора.

Рис. 1
Ротор (рис. 3) представляет собой напрессованный на вал цилиндр (пакет ротора) (1), набранный из отдельных, покрытых специальным изолирующим лаком, тонких листов электротехнической стали с выштампованными вдоль наружной поверхности пазами (2). В пазах уложена трехфазная обмотка ротора  выполненная по типу статорной обмотки и соединенная по схеме «звезда».
выполненная по типу статорной обмотки и соединенная по схеме «звезда».
Начало фаз обмотки  ,
,  ,
,  выведены внутри пустотелого вала и присоединены к контактным кольцам (3). На кольцах наложены медно-графитные щетки (4) ,соединенные с клеммами
выведены внутри пустотелого вала и присоединены к контактным кольцам (3). На кольцах наложены медно-графитные щетки (4) ,соединенные с клеммами  ,
,  ,
,  на щитке ротора.
на щитке ротора.

Рис. 2

Рис. 4
Клеммы  ,
,  ,
,  служат для присоединения к обмотке ротора трехфазного пускорегулировочного реостата
служат для присоединения к обмотке ротора трехфазного пускорегулировочного реостата  (рис. 4), который состоит из трех, разделенных на секции, одинаковых активных сопротивлений
(рис. 4), который состоит из трех, разделенных на секции, одинаковых активных сопротивлений  , соединенных по схеме «звезда». Величину
, соединенных по схеме «звезда». Величину  можно уменьшить ступенями (
можно уменьшить ступенями ( ,
,  ,
,  ,
,  ,
,  = 0), замыкая контакты
= 0), замыкая контакты  ,
,  ,
,  ,
,  последовательным переводом рукоятки (маховичка) реостата
последовательным переводом рукоятки (маховичка) реостата  из положения
из положения  в положения 3, 2, 1,
в положения 3, 2, 1,  = 0.
= 0.
Ток, идущий по обмоткам статора под действием приложенного к зажимам трехфазного напряжения, создает внутри статора вращающийся магнитный поток « ». Частота вращения этого потока относительно статора определяется формулой:
». Частота вращения этого потока относительно статора определяется формулой:
 ,
,
где  − частота питающей трехфазной сети, Гц,
− частота питающей трехфазной сети, Гц,
р − число пар полюсов обмотки статора,
 − частота вращения магнитного потока, об/мин.
− частота вращения магнитного потока, об/мин.
Направление вращения потока  определяется порядком чередования фаз статора. Изменение порядка чередования фаз реверсирует магнитный поток. Чтобы изменить порядок чередования фаз, достаточно поменять местами любые два из трех проводов, соединяющих статор с сетью. Величина вращающегося магнитного потока
определяется порядком чередования фаз статора. Изменение порядка чередования фаз реверсирует магнитный поток. Чтобы изменить порядок чередования фаз, достаточно поменять местами любые два из трех проводов, соединяющих статор с сетью. Величина вращающегося магнитного потока , являющегося суммой трех синусоидальных магнитных потоков фазных обмоток статора, не изменяется во времени и определяется формулой:
, являющегося суммой трех синусоидальных магнитных потоков фазных обмоток статора, не изменяется во времени и определяется формулой:
 = 3/2
= 3/2  ,
,
где  ─ амплитуда синусоидального изменяющегося магнитного потока фазной обмотки статора.
─ амплитуда синусоидального изменяющегося магнитного потока фазной обмотки статора.
Величина  прямо пропорциональна приложенному к зажимам статора напряжению и при U = const также постоянна. При вращении магнитный поток
прямо пропорциональна приложенному к зажимам статора напряжению и при U = const также постоянна. При вращении магнитный поток  своими силовыми линиями пересекает проводники обмотки ротора и наводит в них трехфазную ЭДС. Так как обмотка ротора замкнута (с одной стороны ─ общей точкой соединенных в звезду фазных обмоток ротора, с другой ─ общей точкой соединенных в звезду сопротивлений реостата
своими силовыми линиями пересекает проводники обмотки ротора и наводит в них трехфазную ЭДС. Так как обмотка ротора замкнута (с одной стороны ─ общей точкой соединенных в звезду фазных обмоток ротора, с другой ─ общей точкой соединенных в звезду сопротивлений реостата ), то по ней пойдет трехфазный ток ротора
), то по ней пойдет трехфазный ток ротора  , который создает вращающийся поток ротора
, который создает вращающийся поток ротора  .
.
Потоки  и
и  вращаются синхронно и образуют общий вращающийся поток двигателя Ф. Общий магнитный поток, сцепленный и с обмоткой статора, и с обмоткой ротора, наводит в них электродвижущие силы. В этом аналогия асинхронного двигателя с трансформатором.
вращаются синхронно и образуют общий вращающийся поток двигателя Ф. Общий магнитный поток, сцепленный и с обмоткой статора, и с обмоткой ротора, наводит в них электродвижущие силы. В этом аналогия асинхронного двигателя с трансформатором.
В результате взаимодействия токов ротора с потоком Ф возникают действующие на проводники обмотки ротора механические силы, создающие вращающий электромагнитный момент М. Если вращающий момент М больше статического тормозного момента на валу  , то ротор двигателя придет во вращение в направлении вращения поля с частотой вращения
, то ротор двигателя придет во вращение в направлении вращения поля с частотой вращения  <
< . Относительную разность частот вращения поля и ротора
. Относительную разность частот вращения поля и ротора  называют скольжением.
называют скольжением.
Частота вращения ротора, выраженная через скольжение будет

 .
.
При пуске двигателя  = 0, а s = 1. Если бы ротор вращался синхронно с полем статора (
= 0, а s = 1. Если бы ротор вращался синхронно с полем статора ( =
=  ), то скольжение было бы равно нулю (s = 0). При
), то скольжение было бы равно нулю (s = 0). При 
 магнитное поле статора неподвижно относительно ротора и токи в роторе индуктироваться не будут, поэтому М = 0. Следовательно, такой частоты вращения двигатель достичь не может, отсюда и название ─ асинхронный (неодновременный).
магнитное поле статора неподвижно относительно ротора и токи в роторе индуктироваться не будут, поэтому М = 0. Следовательно, такой частоты вращения двигатель достичь не может, отсюда и название ─ асинхронный (неодновременный).
studfiles.net

Категория:
Схемы электроприводов крановых механизмов
Асинхронный электропривод, с фазным роторомСкорость вращения асинхронного электродвигателя с фазным ротором можно регулировать, изменяя величину сопротивления его роторной цепи. На башенных кранах электродвигателями управляют с помощью магнитных или силовых контроллеров.
Принципиальная схема управления двигателем с помощью магнитного контроллера показана на рис. 91, а. В первом положении командоконтроллера Вперед замыкается контакт В1-1 и включается катушка К1. Контактор К1 включает статор двигателя и тормозной электромагнит в сеть. В цепь ротора двигателя включено полное сопротивление пускорегулирующего реостата и двигатель работает на характеристике со скоростью при заданном моменте сопротивления Мс (рис. 91, б). Во втором положении замыкается контакт В1-3 командоконтроллера и включается контактор КЗ, который закорачивает часть сопротивления реостата. Двигатель работает на характеристике со скоростью пц. В третьем положении контроллера включается контактор К4, который закорачивает обмотку ротора двигателя и двигатель будет работать на естественной характеристике III со скоростью «ш (рис. 91, б).
Принципиальная схема управления двигателем с помощью силового контроллера показана на рис. 91, в. В первом положении при включении Вперед замыкаются контакты В2-1 и В2-3 контроллера, включая в сеть обмотку статора двигателя и тормозной магнит. Двигатель работает на характеристике I (рис. 91, д). Во втором, третьем и четвертом положениях последовательно закорачиваются ступени реостата R (см. рис. 91, г) и двигатель работает соответственно на характеристиках II, III я IV. В пятом положении контроллера пуско-регулирующий реостат R будет полностью закорочен и двигатель будет работать на естественной характеристике со скоростью пу (рис, 91, д).
Искусственные (реостатные) механические характеристики, получаемые при работе двигателя с включенным добавочным сопротивлением в цепи ротора, имеют больший наклон к оси моментов, т. е. обладают меньшей жесткостью. Чем больше введенное в цепь ротора сопротивление, тем круче идет характеристика, тем меньше ее жесткость и меньше скорость вращения двигателя при одном и том же моменте сопротивления. Следовательно, при постоянной нагрузке на валу скорость вращения двигателя будет возрастать при уменьшении сопротивления в цепи его ротора (при переводе рукоятки управления в последнее положение) и уменьшаться при увеличении сопротивления.
Особенность работы двигателя грузовой лебедки заключается в том, что подвешенный на крюке груз стремится вращать лебедку в направлении спуска. При включении двигателя на подъем его вращающий момент всегда больше момента сопротивления, создаваемого ч грузом, и двигатель вращается в направлении подъема груза. Изменяя величину сопротивления в цепи ротора, можно обеспечить работу двигателя на искусственных и естественной характеристиках (кривые 1П, 2П, ЗП, 4П, 5П на рис. 91, ё) и при достаточно большой нагрузке. Регулировать скорость вращения двигателя. Когда двигатель включен в направлении спуска, то груз не только преодолевает силы трения, но и стремится ускорить вращение двигателя в направлении спуска. Скорость двигателя очень быстро достигает синхронной, после чего Двигатель начинает работать как генератор, преодолевая момент (усилие) груза, т. е. тормозя механизм.

Рис. 91. Управление асинхронными электродвигателями с фазным ротором:а — принципиальная схема управления с помощью магнитного контроллера, б — механические характеристики двигателя при управлении магнитным контроллером, е — принципиальная схема управления с помощью силового контроллера, г — цепь ротора двигателя при первом, втором, третьем, четвертом и пятом положениях рукоятки силового контроллера, д — механические характеристики двигателя при управлении силовым контроллером, е — механические характеристики двигателя грузовой лебедки при управлении силовым контроллером
Если сопротивление в цепи ротора двигателя полностью закорочено, то скорость опускания груза будет на 5—10% больше синхронной скорости (характеристика 5С и скорость п5с при моменте Мс на рис. 91 е). Увеличением роторного сопротивления уменьшить скорость спуска груза нельзя, наоборот, она будет увеличиваться при включении сопротивления в цепь ротора двигателя.
Из сказанного видно, что скорость вращения грузовой лебедки можно регулировать изменением величины роторного сопротивления двигателя только при подъеме тяжелого груза. При подъеме легкого груза скорость этим способом практически не регулируется. При спуске как пустого крюка, так и всякого груза скорость всегда близка к синхронной или чуть больше ее при закороченном сопротивлении ротора и увеличивается при включении этого сопротивления.

Рис. 92. Торможение электродвигателя противовключением:а — схема управления, б — механические характеристики двигателя; 1П, 217, ЗП, 417 и 5П — характеристики двигателя при соответствующем положении контроллера, включенного на подъем; 1С, 2С, ЗС, 4С, 5С — характеристики двигателя при соответствующем положении контроллера, включенного на спуск; 1Пр, 2Пр ~ характеристики двигателя, работающего в режиме противовключения соответственно во втором и первом положениях контроллера; RI — пускорегулирующий реостат, R2 — реостат торможения противовключением
Для получения небольших скоростей спуска на ряде кранов применяется электрическая схема, предусматривающая возможность торможения противовключением (рис. 92, а). Торможение противовключением заключается в том, что при спуске груза двигатель включается на подъем, а в цепь его ротора включается дополнительное сопротивление R2. Введение дополнительного сопротивления, а в первом положении контроллера также отключение одной фазы ротора приводит к тому, что вращающий момент двигателя (включенного на подъем) оказывается меньше момента, создаваемого грузом, в результате чего происходит замедленный спуск груза (характеристика 2Пр и скорость япр2 на рис. 92, б).
Скорость спуска можно регулировать, изменяя контроллером величину сопротивления пускорегулирующего реостата. Так, во втором положении контроллера будут закорочены две ступени реостата, а все три фазы ротора соединятся в звезду и скорость спуска уменьшится (япр1 на рис. 92, б). В третьем положении будет закороченач еще часть сопротивления реостата и т. д.
Для включения в цепь ротора дополнительного реостата исполь-. зуют выключатель В2 с ножным приводом и контактор К1. Если педаль выключателя не нажата, то контактор К1 включен, а его контакты закорачивают дополнительные резисторы и включают в звезду все три фазы ротора. В этом случае работа схемы аналогична рассмотренной выше и двигатель работает на одной из характеристик П при подъеме или С при спуске.
Недостатком схемы торможения противовключением является большая зависимость скорости от массы груза и невозможность опускания с малой скоростью относительно легких грузов. При легких грузах вместо спуска возможен подъем.
Читать далее: Асинхронный электропривод с созданием на валу электродвигателя добавочного тормозного момента
Категория: - Схемы электроприводов крановых механизмов
stroy-technics.ru
 Пусковые свойства асинхронного двигателя зависят от особенностей его конструкции, в частности от устройства ротора.
Пусковые свойства асинхронного двигателя зависят от особенностей его конструкции, в частности от устройства ротора. Пуск асинхронного двигателя сопровождается переходным процессом машины, связанным с переходом ротора из состояния покоя в состояние равномерного вращения, при котором момент двигателя уравновешивает момент сил сопротивления на валу машины.
При пуске асинхронного двигателя имеет место повышенное потребление электрической энергии из питающей сети, затрачиваемое не только на преодоление приложенного к валу тормозного момента и покрытие потерь в самой асинхронном двигателе, но и на сообщение движущимся звеньям производственного агрегата определенной кинетической энергии. Поэтому при пуске асинхронный двигатель должен развить повышенный вращающий момент.
Для асинхронного двигателя с фазным ротором начальный пусковой момент, соответствующий скольжению sп= 1, зависит от активных сопротивлений регулируемых резисторов, введенных в цепь ротора.
 Рис. 1. Пуск трехфазного асинхронного двигателя с фазным ротором: а — графики зависимости вращающего момента двигателя с фазным ротором от скольжения при различных активных сопротивлениях резисторов в цепи ротора, б — схема включения резисторов и замыкающих контактов ускорения в цепь ротора.
Рис. 1. Пуск трехфазного асинхронного двигателя с фазным ротором: а — графики зависимости вращающего момента двигателя с фазным ротором от скольжения при различных активных сопротивлениях резисторов в цепи ротора, б — схема включения резисторов и замыкающих контактов ускорения в цепь ротора.Так, при замкнутых контактах ускорения У1, У2, т. е. при пуске асинхронного двигателя с замкнутыми накоротко контактными кольцами, начальный пусковой момент Мп1 = (0,5 -1,0) Мном, а начальный пусковой ток Iп = (4,5 - 7) Iном и более.
Малый начальный пусковой момент асинхронного электродвигателя с фазным ротором может оказаться недостаточным для приведения в действие производственного агрегата и последующего его ускорения, а значительный пусковой ток вызовет повышенный нагрев обмоток двигателя, что ограничивает частоту его включений, а в маломощных сетях приводит к нежелательному для работы других приемников временному понижению напряжения. Эти обстоятельства могут явиться причиной, исключающей использование асинхронных двигателей с фазным ротором с большим пусковым током для привода рабочих механизмов.
 Введение в цепь ротора двигателя регулируемых резисторов, называемых пусковыми, не только снижает начальный пусковой ток, но одновременно увеличивает начальный пусковой момент, который может достигнуть максимального момента Mmax (рис. 1, а, кривая 3), если критическое скольжение двигателя с фазным ротором
Введение в цепь ротора двигателя регулируемых резисторов, называемых пусковыми, не только снижает начальный пусковой ток, но одновременно увеличивает начальный пусковой момент, который может достигнуть максимального момента Mmax (рис. 1, а, кривая 3), если критическое скольжение двигателя с фазным роторомsкр = (R2' + Rд') / (Х1 + Х2') = 1,
где Rд' — активное сопротивление резистора, находящегося в фазе обмотки ротора двигателя, приведенное к фазе обмотки статора. Дальнейшее увеличение активного сопротивления пускового резистора нецелесообразно, так как оно приводит к ослаблению начального пускового момента и выходу точки максимального момента в область скольжения s > 1, что исключает возможность разгона ротора.
Необходимое активное сопротивление резисторов для пуска двигателя с фазным ротором определяют, исходя из требований пуска, который может быть легким, когда Мп = (0,1 - 0,4) Mном, нормальным, если Мп — (0,5 - 0,75) Мном, и тяжелым при Мп ≥ Мном.
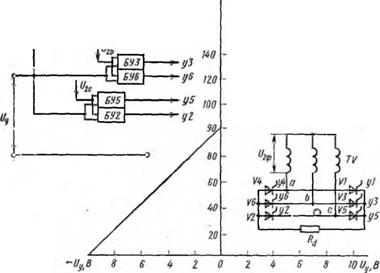
Для поддержания достаточно большого вращающего момента двигателем с фазным ротором в процессе разгона производственного агрегата с целью сокращения длительности переходного процесса и снижения нагрева двигателя необходимо постепенно уменьшать активное сопротивление пусковых резисторов. Допустимое изменение момента в процессе разгона M(t) определяется электрическими и механическими условиями, лимитирующими пиковый предел момента М > 0,85Ммах, момент переключения М2 > > Мс (рис. 2), а также ускорение.
 Рис. 2. Пусковые характеристики трехфазного асинхронного двигателя с фазным ротором
Рис. 2. Пусковые характеристики трехфазного асинхронного двигателя с фазным роторомПереключение пусковых резисторов обеспечено поочередным включением контакторов ускорения Y1, Y2 соответственно в моменты времени t1, t2 отсчитываемые с момента пуска двигателя, когда в процессе разгона вращающий момент М становится равным моменту переключения М2. Благодаря этому на протяжении всего пуска все пиковые моменты получаются одинаковыми и все моменты переключения равны между собой.
Поскольку вращающий момент и ток асинхронного двигателя с фазным ротором взаимно связаны, то можно при разгоне ротора установить пиковый предел тока I1 = (1,5 - 2,5) Iном и ток переключения I2, который должен обеспечить момент переключения М2 > Мc.
Отключение асинхронных двигателей с фазным ротором от питающей сети всегда выполняют при цепи ротора, замкнутой накоротко, во избежание появления перенапряжений в фазах обмотки статора, которые могут превысить номинальное напряжение этих фаз в 3 - 4 раза, если цепь ротора в момент отключения двигателя окажется разомкнутой.
 фазный ротор, электродвигатель
фазный ротор, электродвигательВсего комментариев: 0

ukrelektrik.com