Программа работы
Изучить по имеющейся литературе программирование и работу микропроцессорного блока управления и защиты асинхронного двигателя.
Исследовать работу микропроцессорного блока управления и защиты асинхронного двигателя в режимах программирования, пуска, отключения, перегрузки и обрыва фазы.
Указания и пояснения к проведению работы.
К пункту 1.1 Обратить внимание на принцип работы, вопросы программирования и наладки микропроцессорного блока управления и защиты электродвигателя.
К пункту 1.2 Схема электрическая принципиальная показана на рисунке 9.1, схема электрическая соединений на рисунке 9.2.
Перечень необходимой аппаратуры для монтажа схемы представлен в таблице 9.1.
Таблица 9.1 Перечень аппаратуры для исследования нереверсивного магнитного пускателя
| Обозначение | Наименование | Тип | Параметры |
| G1 | Однофазный источник питания | 218 | -220 В / 16 А |
| Обозначение | Наименование | Тип | Параметры |
| G2 | Трехфазный источник питания | 201.2 | -400 В /16 А |
| Ml | Асинхронный двигатель с короткозамкнутым ротором | 106 | 120 Вт/-380 В / 1500 мин-1 |
| А2, А15 | Контактор | 364 | -380 В /10 А |
| А10 | Автоматический трехполюсный выключатель | 360 | -440 В /10 А |
| A11 | Автоматический однополюсный выключатель | 359 | -230 В /0,5 А |
| А17 | Блок управления и защиты асинхронного двигателя | 368 | Номинальные напряжение / ток двигателя: ~380В /0Д...1А; коммутируемое напряжение / ток: - 220 В/8 А |
| PI | Блок мультиметров | 508.2 | 3 мультиметра = 0... 1000 В / -0...10А / 0...20МОм |

Рисунок 9.1 – Схема электрическая принципиальная микропроцессорного блока управления и защиты асинхронного двигателя

Рисунок 9.2 – Схема электрическая соединений элементов стенда
Последовательность действий при проведении эксперимента:
Убедитесь, что устройства, используемые в эксперименте, отключены от сети электропитания.
Соедините гнезда защитного заземления " " устройств, используемых в эксперименте, с гнездом "РЕ" трехфазного источника питания G2.
" устройств, используемых в эксперименте, с гнездом "РЕ" трехфазного источника питания G2.
Соедините аппаратуру в соответствии со схемой электрической соединений.
Включите автоматический выключатель и устройство защитного отключения в однофазном источнике питания G1.
Включите выключатель «СЕТЬ» блока мультиметров P1
Активизируйте используемый мультиметр Р1.1.
Включите источник G2. О наличии напряжений фаз на его выходе должны сигнализировать светящиеся лампочки.
Включите выключатель А10.
Включите выключатель А11. На мониторе блока АЗЗ высветится надпись «А.000», означающая увеличенное в 100 раз текущее (равное нулю) значение тока в фазе «А» двигателя M1, а также загорится светодиод около надписи «СТОП».
Выполните программирование блока управления и токовой защиты асинхронного двигателя. Для чего:
Проверьте заданные (по умолчанию) номинальные фазные токи двигателя. Для этого нажмите и удерживайте более 2 секунд кнопку « ». На мониторе должна появиться надпись «А.042», означающая, что для фазы «А» двигателя задан номинальный ток I1=0,42А. Нажмите и отпустите кнопку «
». На мониторе должна появиться надпись «А.042», означающая, что для фазы «А» двигателя задан номинальный ток I1=0,42А. Нажмите и отпустите кнопку « ». На мониторе должна появиться надпись «В.042», означающая, что для фазы «В» двигателя задан номинальный ток I1=0,42 А. Еще раз нажмите и отпустите кнопку «
». На мониторе должна появиться надпись «В.042», означающая, что для фазы «В» двигателя задан номинальный ток I1=0,42 А. Еще раз нажмите и отпустите кнопку « ». На мониторе должна появиться надпись «С.042», означающая, что для фазы «С» двигателя задан номинальный ток I1=0,42 A.
». На мониторе должна появиться надпись «С.042», означающая, что для фазы «С» двигателя задан номинальный ток I1=0,42 A.
При необходимости изменения номинального тока конкретной фазы, прежде всего, кнопкой « » выберите эту фазу. Затем кнопкой «
» выберите эту фазу. Затем кнопкой « » вызовите мигание нужного разряда на мониторе и кнопкой «
» вызовите мигание нужного разряда на мониторе и кнопкой « » установите в этом разряде требуемую цифру (от 0 до 9). Устанавливаемое трехразрядное число (от 1 до 250) должно быть равно увеличенному в 100 раз значению номинального тока фазы. Например, для установки номинального тока I1=l,25 А следует установить число 125. После установки числа запишите его в память монитора. Для этого нажмите и отпустите кнопку «
» установите в этом разряде требуемую цифру (от 0 до 9). Устанавливаемое трехразрядное число (от 1 до 250) должно быть равно увеличенному в 100 раз значению номинального тока фазы. Например, для установки номинального тока I1=l,25 А следует установить число 125. После установки числа запишите его в память монитора. Для этого нажмите и отпустите кнопку « ».
».
Вернитесь в основное меню. Для этого нажмите кнопку « ». На мониторе должна отобразится надпись «А.000».
». На мониторе должна отобразится надпись «А.000».
Введите параметры защиты двигателя.
Нажмите и удерживайте более 2 секунд кнопку « ». На мониторе отобразится надпись «I250», означающая, что задан ток перегрузки I2=50 %. При превышении на 50 % тока двигателя его заданного номинального тока I1 должно происходить аварийное отключение двигателя с появлением на мониторе сообщения «OL2». Например, при заданном номинальном токе I1=0,42 A аварийное отключение двигателя должно происходить при превышении током двигателя уровня IOL2=0,42+(0,42٠50)/100=0,63 А. При необходимости изменения тока I2 кнопкой «
». На мониторе отобразится надпись «I250», означающая, что задан ток перегрузки I2=50 %. При превышении на 50 % тока двигателя его заданного номинального тока I1 должно происходить аварийное отключение двигателя с появлением на мониторе сообщения «OL2». Например, при заданном номинальном токе I1=0,42 A аварийное отключение двигателя должно происходить при превышении током двигателя уровня IOL2=0,42+(0,42٠50)/100=0,63 А. При необходимости изменения тока I2 кнопкой « » вызовите мигание нужного разряда на мониторе и кнопкой «
» вызовите мигание нужного разряда на мониторе и кнопкой « » установите требуемую цифру (от 0 до 9). Установленное число (от 0 до 99) запишите в память монитора и перейдите к заданию следующего параметра. Для этого нажмите кнопку «
» установите требуемую цифру (от 0 до 9). Установленное число (от 0 до 99) запишите в память монитора и перейдите к заданию следующего параметра. Для этого нажмите кнопку « ».
».
На мониторе отобразится надпись «I370», означающая, что задан ток недогрузки Iз=70 %. При уменьшении тока, например, в фазе «А» двигателя в результате ее обрыва, до уровня 70 % от заданного номинального тока I1 должно происходить его аварийное отключение с появлением на мониторе сообщения «A.OL3». Например, при заданном номинальном токе I2=0,42 А и обрыве фазы «А» двигателя его аварийное отключение должно происходить при уменьшении тока двигателя ниже уровня IOL3=(0,42-70)/100=0,29 А. При необходимости изменения тока Iз кнопкой « » вызовите мигание нужного разряда на мониторе и кнопкой «
» вызовите мигание нужного разряда на мониторе и кнопкой « » установите требуемую цифру (от 0 до 9). Установленное число (от 0 до 99) запишите в память монитора и перейдите к заданию следующего параметра. Для этого нажмите кнопку «
» установите требуемую цифру (от 0 до 9). Установленное число (от 0 до 99) запишите в память монитора и перейдите к заданию следующего параметра. Для этого нажмите кнопку « ».
».
На мониторе отобразится надпись «t010», означающая, что задано время t0=10 с, необходимое для останова (выбега) двигателя после подачи команды на его реверсирование. При подаче команды на реверс двигателя она должна начать выполняться спустя заданное время t0. При необходимости изменения времени t0 кнопкой « » вызовите мигание нужного разряда на мониторе и кнопкой «
» вызовите мигание нужного разряда на мониторе и кнопкой « » установите требуемую цифру (от 0 до 9). Установленное число (от 0 до 99) запишите в память монитора и перейдите к заданию следующего параметра. Для этого нажмите кнопку «
» установите требуемую цифру (от 0 до 9). Установленное число (от 0 до 99) запишите в память монитора и перейдите к заданию следующего параметра. Для этого нажмите кнопку « ».
».
На мониторе отобразится надпись «tl03», означающая, что задано время t1=3 с. При превышении тока двигателя его четырехкратного заданного номинального тока I1 продолжительностью более 3 секунд должно происходить аварийное отключение двигателя с появлением на мониторе сообщения «OL1». Например, при заданном номинальном токе двигателя I1=0,42 А и реальном токе двигателя превышающем значение IOLI=4٠0,42=1,64 А, через 3 секунды должно происходить аварийное отключение двигателя. При необходимости изменения времени t1 кнопкой « » вызовите мигание нужного разряда на мониторе и кнопкой «
» вызовите мигание нужного разряда на мониторе и кнопкой « » установите требуемую цифру (от 0 до 9). Установленное число (от 0 до 99) запишите в память монитора и перейдите к заданию следующего параметра. Для этого нажмите кнопку «
» установите требуемую цифру (от 0 до 9). Установленное число (от 0 до 99) запишите в память монитора и перейдите к заданию следующего параметра. Для этого нажмите кнопку « ».
».
На мониторе отобразится надпись «t205», означающая, что задано время t2=05 с. При перегрузке двигателя типа «OL2» его аварийное отключение должно происходить спустя время t2=5 с. При необходимости изменения времени t2 кнопкой « » вызовите мигание нужного разряда на мониторе и кнопкой «
» вызовите мигание нужного разряда на мониторе и кнопкой « » установите требуемую цифру (от 0 до 9). Установленное число (от 0 до 99) запишите в память монитора и перейдите к заданию следующего параметра. Для этого нажмите кнопку «
» установите требуемую цифру (от 0 до 9). Установленное число (от 0 до 99) запишите в память монитора и перейдите к заданию следующего параметра. Для этого нажмите кнопку « ».
».
На мониторе отобразится надпись «t305», означающая, что задано время t3=5с. При недогрузке (обрыве фазы) двигателя типа «OL3» его аварийное отключение должно происходить спустя время t3=5 с. При необходимости изменения времени t3 кнопкой « » вызовите мигание нужного разряда на мониторе и кнопкой «
» вызовите мигание нужного разряда на мониторе и кнопкой « » установите требуемую цифру (от 0 до 9). Установленное число (от 0 до 99) запишите в память монитора и перейдите к заданию следующего параметра. Для этого нажмите кнопку «
» установите требуемую цифру (от 0 до 9). Установленное число (от 0 до 99) запишите в память монитора и перейдите к заданию следующего параметра. Для этого нажмите кнопку « ».
».
Вернитесь в основное меню. Для этого нажмите кнопку « ». На мониторе блока должна отобразится надпись «А.000».
». На мониторе блока должна отобразится надпись «А.000».
Нажмите и отпустите кнопку « » на мониторе блока А17. Загорится светодиод около надписи «ВПЕРЕД».
» на мониторе блока А17. Загорится светодиод около надписи «ВПЕРЕД».
Нажмите и отпустите кнопку « » на мониторе блока А17. Произойдет прямой пуск двигателя Ml. Вольтметр Р1.1 покажет напряжение на двигателе Ml. На мониторе блока А17 высветится увеличенное в 100 раз текущее значение тока двигателя Ml в выбранной фазе. Для наблюдения значения тока в другой фазе нажмите и отпустите кнопку «
» на мониторе блока А17. Произойдет прямой пуск двигателя Ml. Вольтметр Р1.1 покажет напряжение на двигателе Ml. На мониторе блока А17 высветится увеличенное в 100 раз текущее значение тока двигателя Ml в выбранной фазе. Для наблюдения значения тока в другой фазе нажмите и отпустите кнопку « ».
».
Нажмите на кнопку « » монитора блока А17.
» монитора блока А17.
Вновь осуществите прямой пуск двигателя Ml.
Нажимая кнопку « » на мониторе блока АЗЗ, добейтесь загорания светодиода около надписи «НАЗАД».
» на мониторе блока АЗЗ, добейтесь загорания светодиода около надписи «НАЗАД».
Нажмите и отпустите кнопку « » на мониторе блока А17. Двигатель Ml должен отключиться от сети и через время t0= 10 с должен произойти его прямой пуск в обратном направлении.
» на мониторе блока А17. Двигатель Ml должен отключиться от сети и через время t0= 10 с должен произойти его прямой пуск в обратном направлении.
Нажимая кнопку « » добейтесь загорания светодиода около надписи «СТОП».
» добейтесь загорания светодиода около надписи «СТОП».
Осуществите останов двигателя Ml нажатием на кнопку « » монитора блока А17.
» монитора блока А17.
По завершении эксперимента отключите нажатием на кнопку «красный гриб» трехфазный источник питания G2 и автоматический выключатель в однофазном источнике питания G1.
Результаты работы отразите в отчете по лабораторной работе.
Содержание отчета
Цель и программа работы.
Схема принципиальная и схема соединений.
Результаты опытов.
Выводы по работе.
Вопросы для самоконтроля
С какой целью применяется микропроцессор в схеме управления асинхронным электродвигателем?
Каким образом осуществляется защита и реверс асинхронного электродвигателя?
Какие блоки необходимо выбрать для сборки схемы?
Какие действия необходимо выполнить при проведении эксперимента?
какие результаты должны быть получены?
Вопросы для защиты отчета
Какие функции выполняет микропроцессорный блок управления и защиты?
Приведите структурную схему микропроцессорного устройства и поясните назначение его составляющих.
Каким образом параметры электродвигателя или другого устройства (ток, напряжение, частота и направление вращения, температура и т. п.) преобразуются в цифровой код? Приведите примеры.
Какие элементы осуществляют связь между микропроцессором и выходными устройствами? Приведите примеры.
Каковы особенности применения микропроцессорной техники в электрических и электронных аппаратах. Поясните возможность применения микропроцессорных устройств, для защиты электродвигателя с помощью тепловых реле.
Каким образом по величине тока фазы определяется температура нагрева двигателя и информация о ней передается в микропроцессор?
Как работают периферийные устройства в случае перегрева двигателя?
Каким образом реализуются функции защиты двигателя от несимметрии фазных токов, в частности, при обрыве одной из фаз?
Каким образом осуществляется возврат реле в рабочий режим после аварийного отключения?
Каким образом вызывается тест-программа, проверяющая работоспособность реле?
Каким образом производится настройка реле на заданный допустимый ток двигателя?
Поясните результаты экспериментальной работы.
studfiles.net
Блоки и панели управления асинхронными двигателями серии БМ-К5050
Назначение
 Серия блоков БМ-К5050 предназначена для управления асинхронными двигателями с короткозамкнутым ротором мощностью до 300 кВт. Блоки БМ-К5050 предназначены для установки в шкафах щитов станций управления.
Блоки модульной конструкции серии БМ-К5050 выполнены с применением современных российских комплектующих и импортных фирмы Schneider Electric.
Блоки предназначены для управления пуском и остановкой асинхронных двигателей с короткозамкнутым ротором, работающих в категории применения АСЗ по ГОСТ Р 50030.1-92. Возможно, применение блоков для кратковременного и повторно-кратковременного режима работы. Питание цепи управления предусмотрено — фазным напряжением ~ 220В от собственной силовой цепи ~ 380В по схеме «фаза-нуль». Защита цепи управления от короткого замыкания и перегрузки осуществляется автоматическим выключателем в фазном проводе. В блоках на ток до 20А автоматический выключатель отсутствует, поскольку в них данная защита обеспечена выключателем главной цепи.
Блоки и панели серии БМ-К5030 производятся в соответствии с ТУ3434-010-33874352-2015. Сертификат соответствия № ТС RU C-RU.МЮ62.В.01738.
Серия блоков БМ-К5050 предназначена для управления асинхронными двигателями с короткозамкнутым ротором мощностью до 300 кВт. Блоки БМ-К5050 предназначены для установки в шкафах щитов станций управления.
Блоки модульной конструкции серии БМ-К5050 выполнены с применением современных российских комплектующих и импортных фирмы Schneider Electric.
Блоки предназначены для управления пуском и остановкой асинхронных двигателей с короткозамкнутым ротором, работающих в категории применения АСЗ по ГОСТ Р 50030.1-92. Возможно, применение блоков для кратковременного и повторно-кратковременного режима работы. Питание цепи управления предусмотрено — фазным напряжением ~ 220В от собственной силовой цепи ~ 380В по схеме «фаза-нуль». Защита цепи управления от короткого замыкания и перегрузки осуществляется автоматическим выключателем в фазном проводе. В блоках на ток до 20А автоматический выключатель отсутствует, поскольку в них данная защита обеспечена выключателем главной цепи.
Блоки и панели серии БМ-К5030 производятся в соответствии с ТУ3434-010-33874352-2015. Сертификат соответствия № ТС RU C-RU.МЮ62.В.01738.
Основные технические параметры
Классификация по техническим параметрам серии блоков БМ-К5050Х-Х74S и БМ-К5050Х-Х74U дана в соответствующих таблицах номенклатурного каталога. Принципиальные схемы представляют собой традиционные схемы пуска асинхронных двигателей с короткозамкнутым ротором с помощью пускателей. Принципиальные схемы и чертежи общих видов блоков БМ-К5050 приведены в технической информации НКУ.3434.001-2003.
Аппаратура
Аппаратура блоков БМ-К5050Х-ХХ74SВ качестве коммутационных аппаратов в блоках БМ-К5050Х-ХХ74S на токи до 160А применены пускатели LC1-D09… LC1-D150 и реверсивные пускатели LC2-D09… LC2-D150. Для блоков БМ-К5050Х- XX 74S на токи 160А и выше применены контакторы LC1-F225… LC1-F630 и реверсивные контакторы LC2-F225, LC2-F265. В данной серии блоков предусмотрены следующие виды защит: • защита главной цепи от короткого замыкания, • защита двигателя от перегрузки, • защита двигателя от неполнофазного режима, • защита двигателя от обрыва фаз, • защита цепи управления от короткого замыкания и перегрузки. Защита главной цепи от короткого замыкания осуществляется автоматическими выключателями серии GV2-ME, GV3-ME с комбинированным расцепителем и серии Compact NS с электронными расцепителями. Защита двигателя от перегрузки недопустимой продолжительности и от обрыва фазы осуществляется трехполюсными тепловыми реле перегрузки серии LRD, LR9D и LR9F. Они предназначены для защиты цепей переменного тока и двигателей от перегрузки, исчезновения фазы, затянутого времени пуска и заклинивания ротора.
Аппаратура блоков БМ-К5050Х-ХХ74UВ качестве коммутационных аппаратов в блоках БМ-К5050Х-ХХ74U на токи до 80А применены пускатели ПМУ09…95 и реверсивные пускатели ПМУР09…95, на токи 100…250А применены пускатели ПМ12-160150 и ПМ12-250150 и реверсивные пускатели ПМ12-160500 и ПМ12-250500. Для блоков БМ-К5050Х -ХХ74 U на токи 320А и выше применены контакторы КВ1-400-3, КВ1-630-3 и реверсивный контактор КВ1-400-3-Р. Защита главной цепи от короткого замыкания осуществляется автоматическими выключателями серий: ВАМУ, АЕ2046, ВА57Ф35 и ВА57-39 с комбинированным расцепителем. Защита двигателя от перегрузки недопустимой продолжительности и от обрыва фазы осуществляется трехполюсными тепловыми реле перегрузки серии РТЛУ, РТТ и РТЛ. Они предназначены для защиты цепей переменного тока и двигателей от перегрузки, исчезновения фазы, затянутого времени пуска и заклинивания ротора.
Конструкция
Блоки серии БМ-К5050 представляют собою открытые или защищенные НКУ одностороннего переднего обслуживания. Комплектующая аппаратура блоков до 200А (индексы 1774…4374) установлена на металлической панели посредством винтового крепления, обеспечивающих установку и снятие аппаратов спереди. Для блоков на токи до 125А (до 75 кВт) устанавливается дополнительно промежуточный силовой клеммник для подвода питания к блоку. Конструктивно он располагается справа от блока на динрейке, смонтированной на каркасе щита. Наличие промежуточного силового клеммника улучшает эксплуатационные характеристики щитов и их внешний вид, т.к. позволяет рационально формировать и крепить жгуты отходящих кабелей. Панели по высоте и по установочным размерам кратны шагу 50 мм, а по ширине приняты одного размера 450 мм, обеспечивающего с одной стороны достаточно легкий съем и замену, а с другой стороны позволяющий оптимально разместить аппараты силовой цепи для двигателей самого массового применения (до 10…20 кВт). Ширина ячейки каркаса открытого щита или шкафа защищенного щита может быть 600 или 800 мм. В большинстве случаев ширина равна 600 мм, соответственно левый и правый промежутки ячейки, предназначенный для размещения кабелей и клеммников Х2, ХТ1 и ХТ2, всегда равны 75 мм. Если на панели установлены блоки на ток более 63А и их количество более 2-х, то ширина правого промежутка увеличена до 175 мм для удобства подключения питания от верхних шин. Также увеличивается ширина левого промежутка до 175 мм для удобства монтажа отходящих кабелей. Соответственно ширина ячейки открытого щита или шкафа в этом случае должна быть 800 мм. Комплектующая аппаратура блоков с типовыми индексами 4474…4874 устанавливается на раму с помощью спецпланок. Глубина открытого щита или шкафа (типовые индексы 4474…4674) может быть 600 или 800 мм. Над блоком с контактором (типовые индексы 4474…4674) на одной с ним раме шириной 450 мм могут устанавливаться другие блоки или аппаратура россыпью. Если в открытом щите или шкаф у установлены блоки на ток более 200А и их количество равно 2-м, то его ширина должна быть 800 мм. Глубина открытого щита или шкафа (типовой индекс 4874) может быть 600 или 800 мм. Над блоком с контактором (типовой индекс 4874) на одной с ним раме шириной 600 мм может быть установлена только аппаратура россыпью. При этом рама должна быть сдвинута в сторону фасада на 150 мм от плоскости задних стоек каркаса щита. Ширина ячейки открытого щита или шкафа должна быть 600 мм. Блоки рассчитаны на установку в открытые или защищенные щиты. В открытом щите в качестве несущей конструкции используется каркас шкафа без дверей, без задней и боковых стенок, но с крышей, а также с боковыми стенками по торцам щита.
Блоки серии БМ-К 5050 поставляются:
• в составе щитов открытого исполнения; • в составе щитов защищенного исполнения; • в отдельных шкафах; • отдельными блоками. В качестве несущих конструкций используются шкафы серий «Каскад» и «Корал», разработки ООО «ПУ Казаньэлектрощит», а также шкафы серии Sarel Spacial 6000 производства «Schneider Electric». Полезная площадь размещения панелей в шкафу ограничена сверху на 200 мм от плоскости верхней рамы для размещения силовых шин и снизу на 250 мм от плоскости нижней рамы каркаса щита для размещения нулевой шины и шины заземления и для удобства включения автоматического выключателя, расположенного на панели. Полезная площадь размещения панелей в шкафу и аппаратуры на двери приведены на соответствующих рисунках номенклатурного каталога.
Модификация по аппаратному составу
Дополнительный резервный клеммник Х2 для цепей управления используется заказчиком по своему усмотрению, например, как дополнительный к данному блоку или для транзита цепей управления электрооборудования объекта. При заказе возможна установка дополнительного силового клеммника ХТ2 для подключения линий нагрузки. Конструктивно ХТ2 располагается слева от блока на динрейке, смонтированной на каркасе щита. В заказе необходимо указать сечение отходящих кабелей. Классификация блоков по наличию дополнительных клеммников приведена в соответствующей таблице номенклатурного каталога. По заказу возможны варианты различных схемных решений, в том числе введение дополнительных промежуточных реле, реле тока, реле времени, контрольной или сигнализирующей аппаратуры. Эти изменения могут увеличить величину блока, что необходимо оговаривать в заказе!
Структура условного обозначения
* — индекс (А, Б, В, Г) определяет наличие дополнительных силовых клеммников для подключения цепей нагрузки и наличие дополнительных резервных клеммников цепей управления (см. соответствующую таблицу номенклатурного каталога).
Назад в раздел
www.kazan-electro.ru
Цель изобретения повысить динамические возможности электропривода транспортного средства, питающегося от источника постоянного напряжения по системе преобразователь частоты - асинхронный электродвигатель, улучшить его энергетические характеристики и упростить систему управления. Эта цель достигается тем, что в качестве асинхронного электродвигателя используется двигатель с фазным ротором, обмотки статора которого соединены с выходом преобразователя постоянного напряжения в трехфазное напряжение с регулируемой амплитудой, с регулируемой частотой и с изменяемым порядком чередования фаз, обмотки ротора соединены с мостовым трехфазным выпрямителем, а этот выпрямитель подключен к источнику постоянного напряжения через дроссель, импульсный прерыватель и отсекающий диод. Наиболее эффективным является применение предлагаемого устройства в электровозах, троллейбусах, мотор-вагонах метро, поскольку эффективность рекуперации в режимах торможения транспортного средства обеспечит быструю окупаемость предлагаемого устройства, а функциональная простота системы управления и широкие возможности управления двигателем обеспечивают надежность работы транспортного устройства. Возможной областью применения данного устройства являются также электромобили.
Предлагаемое устройство для управления асинхронным электродвигателем предназначено для использования в приводах транспортных средств, работающих в динамических режимах в широком диапазоне скоростей, при питании от источников постоянного напряжения.
Известно устройство «передачи мощности переменного тока тягового транспортного средства» («ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ПЕРЕМЕННОГО ТОКА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА» публикация С2 №2252150 от 2005.05.20, МКИ B 60 L 1/08), в котором «статорные обмотки асинхронного тягового электродвигателя подключены к статорным обмоткам тягового синхронного генератора, а роторная обмотка - к выходу непосредственного преобразователя частоты, также подключенного к статорным обмоткам тягового синхронного генератора».
Недостаток данного устройства заключается в том, что не обеспечивается работа транспортного средства от контактной сети, а также в невозможности работы двигателя в режиме рекуперативного торможения транспортного средства.
Известен «частотно-управляемый асинхронный электропривод преимущественно рельсового транспортного средства» («ЧАСТОТНО-УПРАВЛЯЕМЫЙ СИНХРОННЫЙ ЭЛЕКТРОПРИВОД» публикация А №2003119885 от 2005.02.20 МКИ Н 02 Р 5/34), содержащей асинхронный короткозамкнутый электродвигатель, снабженный не менее, чем двумя дуговыми обмотками статора, подключенными к отдельным автономным инверторам, с целью компенсации «ударного тормозного момента одной дуговой обмотки статора вращающими моментами остальных дуговых обмоток... в случае аварийного режима работы одного из автономных инверторов».
Недостаток данного привода кроме упомянутого в заявке «ударного свойства» заключается в особой конструкции электродвигателя, а также в невозможности работы двигателя в режиме рекуперативного торможения транспортного средства.
Известно устройство («УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОН-НЫМТЯГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ » публикация А №95109366 от 1998.02.20 МКИ. Н 02 Р 7/42) «управления асинхронным тяговым электродвигателем, подключенным к автономному инвертору напряжения, к входу которого подключены тормозной регулятор и выход фильтра звена постоянного тока, вход которого предназначен для подключения к источнику питания» и создана система управления моментом вращения и скоростью.
Недостаток данного устройства заключается в невозможности длительной работы инвертора в режиме рекуперативного торможения асинхронного электродвигателя, что ухудшает энергетические показатели привода, также в том, что без учета положении ротора относительно потока статора системой управления частотой и напряжением инвертора ухудшаются динамические и энергетические характеристики привода.
Известно устройство («ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА» публикация С2 №2247039 от 2005.02.27 МКИ Н 02 Р 7/80), в котором «статорные обмотки тягового синхронного генератора подключены к статорным обмоткам асинхронных тяговых электродвигателей, роторные обмотки каждого асинхронного тягового электродвигателя соединены с индивидуальными выпрямительными мостами, а со стороны выпрямленного напряжения мосты включены параллельно и соединены с обмоткой якоря регулирующей машины постоянного тока, вал которой соединен с валами теплового двигателя и тягового синхронного генератора».
Недостаток данного устройства заключается в том, что не обеспечивается работа транспортного средства от контактной сети, а также в невозможности работы двигателя в режиме рекуперативного торможения транспортного
средства.
Известно устройство («УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ» МКИ Н 02 М 7/5387; MKИ B 60 L 9/22, публикация С2 №2167071 от 2001.05.20) «для использования в силовых цепях постоянно-переменного тока тягового преобразования», содержащее «инвертор для питания асинхронного электродвигателя, интеллектуальный датчик параметров преобразователя, интеллектуальный датчик мгновенного положения ротора) электродвигателя с балластным сопротивлением, блок сравнения параметров преобразователя и электродвигателя», в котором с целью «защиты от самовозбуждения и самораскачивания асинхронного двигателя в начальной стадии» при пуске применены «два блока коммутации компенсационных конденсаторов и разрядных сопротивлений, две батареи компенсационных конденсаторов и две батареи разрядных сопротивлений».
Недостаток данного устройства заключается в сложности интеллектуальной системы управления частотой и в невозможности длительной работы инвертора в режиме рекуперативного торможения асинхронного электродвигателя, что ухудшает энергетические показатели привода.
Известно устройство для тяговых электроприводов с асинхронным электродвигателем на электропоездах (публикация С2 №2193814 от 2002.11.27 «УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ» МКИ НО 2 Р 21/00), содержащее инвертор ШИМ, в котором с целю «упрощение и обеспечение непрерывного (векторного) управления во всем диапазоне скоростей» «изменение глубины модуляции выходного напряжения» (напряжения статора) осуществляется по командам от «созданной схемы для измерения составляющих намагничивающей и моментообразующей составляющей тока статора асинхронного двигателя».
Недостаток данного устройства заключается в сложности системы векторного управления частотой и в невозможности длительной работы инвертора в режиме рекуперативного торможения асинхронного электродвигателя, что ухудшает энергетические показатели привода.
Известно устройство для регулирования скорости асинхронного электродвигателя с фазным ротором при питании от трехфазной сети (авторское свидетельство СССР №502469 от 05.02.76 МКИ Н 02 Р 7/46, Н 02 К 17/34 «Устройство для регулирования скорости асинхронного электродвигателя с фазным ротором»), содержащее выпрямитель в цепи ротора, дроссель, прерыватель постоянного тока, включенный между дросселем и отсекающим диодом, который через фильтр нижних частот подключен к инвертору ведомому трехфазной сетью.
Недостаток этого устройства заключается в том, что его нельзя использовать при питании транспортного средства от сети постоянного тока.
Для электропривода транспортных средства, работающего от источника постоянного напряжения (троллейбус, трамвай, метро, электровозы, электромобили и т.п.) обычно используется двигатель постоянного тока, недостатком которого является наличие коллектора. Использование более простых электродвигателей (асинхронного и синхронного электродвигателей) в этих приводах стало возможным благодаря применению транзисторных преобразователей из постоянного напряжения в трехфазное напряжение с регулируемой частотой и амплитудой и с возможностью изменения порядка следования фаз этого напряжения. Недостатком привода с синхронным электродвигателем является высокая жесткость механической характеристики электродвигателя, которая в условиях транспортного средства вызывает дополнительные повышенные механические нагрузки (удары) в механизмах привода, особенно на низкой скорости (частоте), где напряжение синхронного генератора невелико и поэтому затрудняется естественная коммутация ключей (транзисторов) инвертора.
Наиболее часто в последнее время используется для транспортных средств частотное управление асинхронным короткозамкнутым электродвигателем. Недостатком таких устройств является ограниченные возможности системы преобразователь частоты - асинхронный короткозамкнутый электродвигатель при работе в динамических режимах связанные, в частности,
с невозможностью эффективной работы асинхронного короткозамкнутого электродвигателя в режиме генераторного торможения на постоянной скорости вращения двигателя, а также со сложностью системы векторного управления преобразователем для привода с асинхронным короткозамкнутым электродвигателем.
В результате динамические свойства привода оказываются хуже, чем у привода с двигателями постоянного тока, ограничена возможность рекуперации энергии от движущегося транспортного средства в источник, а система управления очень сложна в наладке и в эксплуатации.
Цель изобретения повысить динамические возможности электропривода транспортного средства, питающегося от источника постоянного напряжения по системе преобразователь частоты - асинхронный электродвигатель, улучшить его энергетические характеристики и упростить систему управления.
Эта цель достигается тем, что в качестве асинхронного электродвигателя используется двигатель с фазным ротором, обмотки статора которого соединены с выходом преобразователя постоянного напряжения в трехфазное напряжение с регулируемой амплитудой, с регулируемой частотой и с изменяемым порядком чередования фаз, обмотки ротора соединены с мостовым трехфазным выпрямителем, а этот выпрямитель подключен к источнику постоянного напряжения через дроссель, импульсный прерыватель и отсекающий диод.
Источник постоянного напряжения 1 подключен к преобразователю 2 постоянного напряжения в трехфазное напряжение, регулируемое по амплитуде, частоте и с изменяемым порядком чередования фаз. Выходы преобразователя 2 подключены к выводам обмоток статора асинхронного электродвигателя с фазным ротором 3. Выводы обмоток ротора через контактные кольца электродвигателя 3 соединены с трехфазным мостовым выпрямителем 4. Первый полюс выпрямленного напряжения выпрямителя 4 соединен с первым выводом дросселя 5, второй вывод дросселя 5 соединен с
первым выводом прерывателя 6. Второй полюс выпрямителя 4 соединен со вторым выводом прерывателя 6 и с одноименным по знаку полюсом источника постоянного напряжения 1. Общая точка дросселя 5 и прерывателя 6 соединена через отсекающий диод 7 со вторым полюсом источника постоянного напряжения 1 в такой полярности диода 7, которая препятствует закорачиванию источника постоянного напряжения 1 в случае замкнутого состояния прерывателя 6.
Устройство работает следующим образом. Постоянное напряжение от источника 1 преобразуется преобразователем 2 в трехфазное напряжение, подаваемое на обмотки статора двигателя 3. В обмотках статора создаются токи, формирующие вращающееся относительно статора магнитное поле, пронизывающее как статор, так и ротор.
Если ротор будет вращаться относительно статора с такой же скоростью что и магнитное поле (с синхронной скоростью), то магнитное поле окажется неподвижным относительно обмоток ротора и в этих обмотках не будет наводиться э.д.с., не будет напряжения на выводах обмоток ротора.
Если скорость ротора будет меньше (или больше) скорости вращения магнитного поля статора, то появится скольжение (вращение) ротора относительно магнитного поля статора, магнитное поле ротора начнет вращаться относительно обмоток ротора и в обмотках ротора будут создаваться э.д.с. Напряжения с выводов обмоток ротора через контактные кольца подаются на вход трехфазного мостового выпрямителя 4 и выпрямляются последним. В разомкнутом состоянии прерывателя 6 напряжение с выхода выпрямителя 4 через дроссель 5 совместно с напряжением источника постоянного напряжения 1 оказывается приложенным к отсекающему диоду 7.
Если скольжение небольшое, то напряжение на выходе выпрямителя 4 меньше по величине, чем напряжение источника 1 и диод 7 оказывается смещенным в обратном направлении. Ток через дроссель 5 не протекает.
Если скольжение достаточно большое, то напряжение на выходе выпрямителя 4 может стать больше по величине, чем напряжение источника
1, а диод 7 оказывается смещенным в прямом направлении; через диод 7, дроссель 5 и обмотки ротора начнет протекать ток в источник постоянного напряжения 1. Это соответствует возврату энергии скольжения ротора в источник 1.
При протекании тока по обмоткам ротора создается момент вращения двигателя 3. Момент вращения двигателя 3 всегда имеет такое направление, которое способствует уменьшению скольжения в соответствии с известным принципом работы асинхронного вентильного каскада. При этом в зависимости от соотношения величины выпрямленного напряжения ротора и величины напряжения источника 1 асинхронный двигатель может оказаться в такой точке механической характеристики, которая соответствует первому квадранту (скорость положительная - движение вперед/вверх, момент вращения положительный) или которая соответствует четвертому квадранту (скорость отрицательная - движение назад/на спуск, момент вращения положительный).
Возможности для работы асинхронного двигателя во втором квадранте (скорость положительная движение вперед/вверх, момент вращения отрицательный) в режиме генераторного торможения при питании обмоток статора от транзисторного инвертора ограничены односторонней проводимостью транзисторов.
Если прерыватель 6 замкнут, то напряжение выпрямителя 4 через прерыватель 6 оказывается приложенным к дросселю 5 и вызовет появления тока через дроссель 5, диоды выпрямителя 4 и через обмотки ротора двигателя 3. Ротор асинхронного электродвигателя практически оказывается закороченным накоротко, и двигатель работает как обычный асинхронный короткозамкнутый электродвигатель, однако питающийся по цепи статора от инвертора.
Если прерыватель 6 размыкается в момент протекания тока через дроссель 5, то в дросселе 5 возникает э.д.с. самоиндукции, направленная согласно с выпрямленным напряжением выпрямителя 4, которая стремится
сохранить величину и направление тока дросселя 5. Эта э.д.с. может достичь такой величины, что диод 7 открывается и пропускает импульс тока в источник постоянного напряжения 1. Поскольку при этом на дросселе 5 напряжение оказывается противоположной полярности по отношении к интервалу замкнутого состояния прерывателя 6, то ток дросселя уменьшается.
Прерыватель 6 может работать в режиме ШИМ с периодическим замыканием и размыканием. Путем изменения скважности работы прерывателя 6 достигается регулирование среднего значения тока дросселя, тока ротора и, соответственно, регулирование среднего значения момента вращения двигателя. При уменьшении интервала замкнутого состояния прерывателя 6 уменьшается среднее значение тока дросселя 5 и момента вращения двигателя, а ток дросселя (и момент вращения двигателя) могут стать прерывистыми. В случае необходимости сглаживания этого тока между выпрямителем 4 и дросселем 5 может быть включен фильтр нижних частот 8.
При работе прерывателя 6 в периодическом режиме (ШИМ) через диод 7 в источник постоянного напряжения 1 поступают импульсы тока. В случае необходимости сглаживания этого тока между диодом 7 и источником постоянного напряжения 1 может быть включен фильтр нижних частот 9.
Изменением порядка следования фаз трехфазного напряжения, подаваемого от преобразователя 2 на обмотки статора, осуществляется перевод двигателя для работы во втором и третьем квадрантах механических характеристик привода. За счет совместного согласованного изменения скважности работы прерывателя 6, изменения частоты, амплитуды и порядка следования фаз трехфазного напряжения преобразователя 2 обеспечивается возможность плавного управления и требуемого быстродействия переходов из двигательного режима в режим рекуперативного торможения транспортного средства и обратно - во всех четырех квадрантах механических характеристик.
Важной особенностью предлагаемого устройства является простота
системы управления. В предлагаемом устройстве отсутствует необходимость векторного управления формированием тока статора, поскольку система работает с выпрямителем роторного напряжения, где по принципу работы выпрямителя обеспечивается наилучшее для формирования момента вращения двигателя переключение тока между фазными обмотками ротора.
Импульсное регулирование выпрямленного тока ротора в широком диапазоне скольжении позволяет снизить требования к поддержанию величины и формы трехфазного напряжения статора, создаваемого преобразователем 2, даже для работы в пусковых режимах транспортного средства, на малой скорости двигателя, в режимах подхвата движения и отката транспортного средства после снятия тормоза.
Управление скоростью привода сводится к управлению частотой на выходе преобразователя и к починенному управлению током ротора (моментом вращения двигателя).
Путем соответствующего управления транзисторами преобразователя 2 можно обеспечить питание обмоток статора постоянным током и создать режим динамического торможения двигателя с плавным управлением моментом торможения двигателя как путем управления током статора с помощью преобразователя 2, так и с использованием управления током ротора с помощью прерывателя 6.
Важной особенностью данного устройства является то, что во всех перечисленных режимах работы привода, в обмотках статора и обмотках ротора нет дополнительных потерь, поскольку прерывателем 6 обеспечивается рекуперация мощности скольжения, а потери в обмотках связаны в основном с величиной момента вращения двигателя и, практически, не связаны со скольжением. Это повышает надежность работы двигателя 3.
Функциональная надежность импульсного управления в цепи ротора достигается также тем, что допускается совместная работа нескольких транзисторов в составе одного прерывателя 6, что позволяет
увеличить эквивалентную частоту работы прерывателя 6 и уменьшить величину пульсаций тока ротора. Обеспечена также независимая параллельная работа от одного выпрямителя разных комплектов - прерыватель 6, дроссель 5, отсекающий диод 7, и независимая параллельная работа от выводов обмоток ротора разных комплектов - выпрямитель 4, дроссель 5, прерыватель 6, отсекающий диод 7.
Асинхронный электродвигатель с фазным ротором обратимая машина относительно статора и ротора. Поэтому подключение выводов статора и выводов ротора можно поменять местами.
Наиболее эффективным является применение предлагаемого устройства в электровозах, троллейбусах, мотор-вагонах метро, поскольку эффективность рекуперации в режимах торможения транспортного средства обеспечит быструю окупаемость предлагаемого устройства, а функциональная простота системы управления и широкие возможности управления двигателем обеспечивают надежность работы транспортного устройства.
Возможной областью применения данного устройства являются также электромобили.
1. Устройство для управления асинхронным электродвигателем транспортного средства от источника постоянного напряжения, содержащее преобразователь постоянного напряжения в трехфазное напряжение с регулируемой амплитудой, регулируемой частотой и изменяемым порядком чередования фаз, отличающееся тем, что в качестве асинхронного электродвигателя используется двигатель с фазным ротором, обмотки статора которого соединены с выходом упомянутого преобразователя, обмотки ротора соединены с мостовым трехфазным выпрямителем, а этот выпрямитель подключен к упомянутому источнику постоянного напряжения через дроссель, импульсный прерыватель и отсекающий диод.
2. Устройство по п.1, отличающееся тем, что, с целью уменьшения пульсаций момента вращения между мостовым трехфазным выпрямителем и дросселем в цепи выпрямленного тока ротора включен фильтр нижних частот.
3. Устройство по любому из пп.1 и 2, отличающееся тем, что, с целью уменьшения пульсаций тока рекуперации, поступающего в источник постоянного напряжения, между ним и отсекающим диодом включен фильтр нижних частот.
4. Устройство по любому из пп.1-3, отличающееся тем, что, с целью улучшения устойчивости режима генераторного торможения параллельно выводам статорных обмоток включены конденсаторы.
5. Устройство по п.1, отличающееся тем, что в качестве прерывателя используются транзисторы IGBT.

poleznayamodel.ru
Изобретение относится к области электротехники. Технический результат заключается в повышении управления электродвигателем. Для этого заявленное устройство содержит автономный инвертор напряжения, силовые выходы которого через датчики токов подключены к статорным обмоткам асинхронного двигателя, блок драйверов, выходы которых соединены с управляющими входами автономного инвертора напряжения. Силовые входы автономного инвертора напряжения соединены с выходами неуправляемого выпрямителя, входы которого подключены к источнику трехфазного переменного напряжения. Блок драйверов соединен с выходами ШИМ-генератора. Блок интерфейса последовательно соединен с входным фильтром, первым сумматором, ПИ-регулятором скорости, вторым сумматором, первым ПИ-регулятором тока, первым и вторым преобразователями координат, фильтром Калмана, третьим сумматором, ПИ-регулятором потокосцепления, четвертым сумматором, вторым ПИ-регулятором тока, первым преобразователем координат, ШИМ-генератором. Блок интерфейса подключен к третьему сумматору. Первый сумматор соединен с нечетким регулятором скорости, выход которого подключен ко второму сумматору. Фильтр Калмана соединен с первым сумматором, первым и третьим преобразователями координат. Выходы датчиков токов соединены с входами второго преобразователя координат, выходы которого подключены к третьему преобразователю координат, который соединен с четвертым и вторым сумматором, а блок интерфейса связан с персональным компьютером. 1 ил.
Изобретение относится к области электротехники, а именно к управлению асинхронными двигателями.
Известно устройство управления асинхронным электродвигателем, содержащее асинхронный двигатель, ШИМ-инвертор, датчик скорости, преобразователь координат, регулятор тока, интегратор, генератор команд на изменение тока, схемы формирования команд на изменение напряжения, команд на изменение угловой частоты вращения, команд на изменение глубины модуляции, сигналов управления ШИМ-инвертором (RU патент №2193814, МПК 7 Н02Р 21/00, опубл. 27.11.2002 г.).
Недостатком известного устройства управления является то, что для его функционирования необходимо оборудовать двигатель датчиком скорости, что снижает область применения данного устройства управления.
Известна система управления асинхронным двигателем, которая выбрана в качестве прототипа, состоящая из блока ввода заданной частоты вращения асинхронного двигателя, блока рассогласования, регулятора напряжения, блока драйверов, выходы которых соединены с управляющими входами автономного инвертора напряжения, автономного инвертора напряжения, датчика текущей частоты вращения асинхронного двигателя, блока вычисления синхронной частоты вращения асинхронного двигателя, наблюдателя состояния (RU патент №2390091, МПК 8 Н02Р 21/08, Н02Р 21/13, Н02Р 23/08, Н02Р 27/06, опубл. 20.05.2010 г.).
Недостатком известной системы управления является то, что для вычисления электрической частоты вращения ротора двигателя наблюдателем состояния необходимо использование датчика скорости, что снижает надежность данной системы.
Задачей изобретения является повышение надежности управления электродвигателем.
Поставленная задача решена за счет того, что устройство управления асинхронным двигателем так же, как и в прототипе, содержит автономный инвертор напряжения, наблюдатель состояния и блок драйверов, выходы которых соединены с управляющими входами автономного инвертора напряжения.
Согласно изобретению силовые выходы автономного инвертора напряжения через датчики токов подключены к статорным обмоткам асинхронного двигателя, а силовые входы автономного инвертора напряжения соединены с выходами неуправляемого выпрямителя, входы которого подключены к источнику трехфазного переменного напряжения. В качестве наблюдателя состояния выбран фильтр Калмана. Блок драйверов соединен с выходами ШИМ-генератора. К блоку интерфейса последовательно подключены входной фильтр, первый сумматор, ПИ-регулятор скорости, второй сумматор, первый ПИ-регулятор тока, первый преобразователь координат, второй преобразователь координат, фильтр Калмана, третий сумматор, ПИ-регулятор потокосцепления, четвертый сумматор, второй ПИ-регулятор тока, первый преобразователь координат, ШИМ-генератор. Блок интерфейса подключен к третьему сумматору. Первый сумматор соединен с нечетким регулятором скорости, выход которого подключен ко второму сумматору. Фильтр Калмана соединен с первым сумматором, первым и третьим преобразователями координат. Выходы датчиков токов соединены со входами второго преобразователя координат, выходы которого подключены к третьему преобразователю координат, который соединен с четвертым и вторым сумматорами, а блок интерфейса связан с персональным компьютером.
Предлагаемое устройство позволяет улучшить динамические характеристики и повысить надежность управления асинхронным двигателем за счет использования нечеткого регулятора скорости совместно с ПИ-регулятором скорости, а также фильтра Калмана, связанного с двумя сумматорами. Улучшение динамических характеристик электропривода обеспечивается нечетким регулятором скорости, который позволяет уменьшить динамический провал скорости двигателя при воздействии возмущающих сигналов. Совместное применение ПИ-регулятора скорости с нечетким регулятором обеспечивает астатизм электропривода по возмущению. Использование фильтра Калмана позволяет повысить надежность управления асинхронным двигателем за счет отказа от механических датчиков скорости и потокосцепления ротора.
На фиг.1 изображена структурная схема устройства управления асинхронным двигателем.
Устройство управления асинхронным двигателем содержит автономный инвертор напряжения 1 (АИН), силовые выходы которого через датчики фазных токов 2, 3, 4 (ДТ) подключены к статорным обмоткам асинхронного двигателя 5 (М). Силовые входы автономного инвертора напряжения 1 (АИН) соединены с выходами неуправляемого выпрямителя 6 (НВ), входы которого подключены к источнику трехфазного переменного напряжения 7 (ИТПН). Управляющие входы автономного инвертора напряжения 1 (АИН) через блок драйверов 8 (БД) соединены с выходами ШИМ-генератора 9 (ШИМ-Г). К блоку интерфейса 10 (БИ) последовательно подключены входной фильтр 11 (ВФ), первый сумматор 12 (С1), ПИ-регулятор скорости 13 (ПИ-РС), второй сумматор 14 (С2), первый ПИ-регулятор тока 15 (ПИ-РТ 1), первый преобразователь координат 16 (ПК 1), второй преобразователь координат 17 (ПК 2), фильтр Калмана 18 (ФК), третий сумматор 19 (С3), ПИ-регулятор потокосцепления 20 (ПИ-РП), четвертый сумматор 21 (С4), второй ПИ-регулятор тока 22 (ПИ-РТ 2), первый преобразователь координат 16 (ПК 1), ШИМ-генератор 9 (ШИМ-Г). Блок интерфейса 10 (БИ) связан с третьим сумматором 19 (С3). Первый сумматор 12 (С1) соединен с нечетким регулятором скорости 23 (Н-РС), выход которого подключен ко второму сумматору 14 (С2). Фильтр Калмана 18 (ФК) связан с первым сумматором 12 (С1), первым преобразователем координат 16 (ПК 1) и третьим преобразователем координат 24 (ПК 3). Датчики фазных токов 2, 3, 4 (ДТ) соединены со вторым преобразователем координат 17 (ПК 2), выходы которого подключены к третьему преобразователю координат 24 (ПК 3), который соединен с четвертым сумматором 21 (С4) и со вторым сумматором 14 (С2). Блок интерфейса 10 (БИ) связан с персональным компьютером (не показан).
В качестве датчиков фазных токов 2, 3, 4 (ДТ) могут быть использованы датчики тока - промышленный прибор КЭИ-0,1. Неуправляемый выпрямитель 6 (НВ) и автономный инвертор напряжения 1 (АИН) конструктивно выполнены в одном устройстве - преобразователе частоты, в качестве которого может быть использован преобразователь частоты VLT FC 300 фирмы Danfoss. Блок драйверов 8 (БД) может быть выполнен на драйверах типа ДРИ11-10-12-1 ОМ1К-1 для управления IGBT модулями. ПИ-регулятор скорости 13 (ПИ-РС), ПИ-регулятор потокосцепления 20 (ПИ-РП), первый ПИ-регулятор тока 15 (ПИ-РТ 1) и второй ПИ-регулятор тока 22 (ПИ-РТ 2) могут быть выполнены на операционных усилителях типа 157УД4 с конденсатором в цепи обратной связи. Сумматоры 12 (С1), 14 (С2), 19 (С3) и 21 (С4) могут быть выполнены на операционных усилителях типа 157УД4. Входной фильтр 11 (ВФ) представляет собой апериодическое звено первого порядка и может быть выполнен на базе RC-цепочки. Первый преобразователь координат 16 (ПК 1), второй преобразователь координат 17 (ПК 2), третий преобразователь координат 24 (ПК 3), нечеткий регулятор скорости 23 (Н-РС), фильтр Калмана 18 (ФК) и ШИМ-генератор 9 (ШИМ-Г) могут быть выполнены на базе микроконтроллера типа TMS320F2812 фирмы Texas Instruments. Блок интерфейса 10 (БИ) может быть реализован на базе последовательного преобразователя интерфейса RS-232.
При включении устройства с персонального компьютера поступает сигнал управления на блок интерфейса 10 (БИ), от которого одновременно подаются команды задания на потокосцепление и на скорость вращения асинхронного двигателя 5 (М) на третий сумматор 19 (С3) и входной фильтр 11 (ВФ) соответственно. От входного фильтра 11 (ВФ) сигнал поступает на первый сумматор 12 (С1), в котором суммируется с отрицательным значением сигнала оценки скорости от фильтра Калмана 18 (ФК). От первого сумматора 12 (С1) сигнал поступает одновременно на нечеткий регулятор скорости 23 (Н-РС) и ПИ-регулятор скорости 13 (ПИ-РС). Далее сигналы с нечеткого регулятора скорости 23 (Н-РС) и ПИ-регулятора скорости 13 (ПИ-РС) идут на второй сумматор 14 (С2), где суммируются с отрицательным значением сигнала проекции вектора тока статора на ось ординат вращающейся системы координат от третьего преобразователя координат 24 (ПК 3). Со второго сумматора 14 (С2) сигнал поступает на первый ПИ-регулятор тока 15 (ПИ-РТ 1). В третьем сумматоре 19 (С3) происходит суммирование команды задания на потокосцепление и отрицательного значения сигнала оценки потокосцепления с фильтра Калмана 18 (ФК). Далее сигнал поступает на ПИ-регулятор потокосцепления 20 (ПИ-РП), с которого идет на четвертый сумматор 21 (С4), где суммируется с отрицательным значением сигнала проекции вектора тока статора на ось абсцисс вращающейся системы координат с третьего преобразователя координат 24 (ПК 3). С четвертого сумматора 21 (С4) сигнал поступает на второй ПИ-регулятор тока 22 (ПИ-РТ 2). На первый преобразователь координат 16 (ПК 1) одновременно поступают сигналы с первого ПИ-регулятора тока 15 (ПИ-РТ 1), второго ПИ-регулятора тока 22 (ПИ-РТ 2) и сигнал оценки угла поворота вектора потокосцепления с фильтра Калмана 18 (ФК). С первого преобразователя координат 16 (ПК 1) сигналы фазных напряжений одновременно поступают на ШИМ-генератор 9 (ШИМ-Г) и на второй преобразователь координат 17 (ПК 2). С ШИМ-генератора 9 (ШИМ-Г) сигналы идут на блок драйверов 8 (БД). На второй преобразователь координат 17 (ПК 2) также поступают сигналы с датчиков фазных токов 2, 3, 4 (ДТ). Со второго преобразователя координат 17 (ПК 2) проекции векторов тока и напряжения статора на оси неподвижной системы координат поступают на фильтр Калмана 18 (ФК). На третий преобразователь координат 24 (ПК 3) поступают сигналы проекций вектора тока статора на оси неподвижной системы координат со второго преобразователя координат 17 (ПК 2). С источника трехфазного переменного напряжения 7 (ИТПН) сигналы поступают на неуправляемый выпрямитель 6 (НВ). На автономный инвертор напряжения 1 (АИН) одновременно поступают сигнал выпрямленного напряжения с неуправляемого выпрямителя 6 (НВ) и сигналы управления силовыми ключами инвертора с блока драйверов 8 (БД). С автономного инвертора напряжения 1 (АИН) сигналы поступают на датчики фазных токов 2, 3, 4 (ДТ) и далее на статорные обмотки асинхронного двигателя 5 (М). Таким образом, заявляемое устройство позволяет регулировать скорость и потокосцепление асинхронного двигателя 5 (М).
bankpatentov.ru
Изобретение относится к области электротехники, а именно к управлению асинхронными двигателями.
Известно устройство управления асинхронным электродвигателем, содержащее асинхронный двигатель, ШИМ-инвертор, датчик скорости, преобразователь координат, регулятор тока, интегратор, генератор команд на изменение тока, схемы формирования команд на изменение напряжения, команд на изменение угловой частоты вращения, команд на изменение глубины модуляции, сигналов управления ШИМ-инвертором (RU патент №2193814, МПК 7 Н02Р 21/00, опубл. 27.11.2002 г.).
Недостатком известного устройства управления является то, что для его функционирования необходимо оборудовать двигатель датчиком скорости, что снижает область применения данного устройства управления.
Известна система управления асинхронным двигателем, которая выбрана в качестве прототипа, состоящая из блока ввода заданной частоты вращения асинхронного двигателя, блока рассогласования, регулятора напряжения, блока драйверов, выходы которых соединены с управляющими входами автономного инвертора напряжения, автономного инвертора напряжения, датчика текущей частоты вращения асинхронного двигателя, блока вычисления синхронной частоты вращения асинхронного двигателя, наблюдателя состояния (RU патент №2390091, МПК 8 Н02Р 21/08, Н02Р 21/13, Н02Р 23/08, Н02Р 27/06, опубл. 20.05.2010 г.).
Недостатком известной системы управления является то, что для вычисления электрической частоты вращения ротора двигателя наблюдателем состояния необходимо использование датчика скорости, что снижает надежность данной системы.
Задачей изобретения является повышение надежности управления электродвигателем.
Поставленная задача решена за счет того, что устройство управления асинхронным двигателем также как и в прототипе содержит автономный инвертор напряжения, наблюдатель состояния и блок драйверов, выходы которых соединены с управляющими входами автономного инвертора напряжения.
Согласно изобретению силовые выходы автономного инвертора напряжения через датчики токов подключены к статорным обмоткам асинхронного двигателя, а силовые входы автономного инвертора напряжения соединены с выходами неуправляемого выпрямителя, входы которого подключены к источнику трехфазного переменного напряжения. В качестве наблюдателя состояния выбран наблюдатель Люенбергера. Блок драйверов соединен с выходами ШИМ-генератора. К блоку интерфейса последовательно подключены входной фильтр, первый сумматор, ПИ-регулятор скорости, второй сумматор, первый ПИ-регулятор тока, первый преобразователь координат, второй преобразователь координат, наблюдатель Люенбергера, третий сумматор, ПИ-регулятор потокосцепления, четвертый сумматор, второй ПИ-регулятор тока, первый преобразователь координат, ШИМ-генератор. Блок интерфейса подключен к третьему сумматору. Первый сумматор соединен с нечетким регулятором скорости, выход которого подключен ко второму сумматору. Наблюдатель Люенбергера соединен с первым сумматором, первым и третьим преобразователями координат. Выходы датчиков токов соединены со входами второго преобразователя координат, выходы которого подключены к третьему преобразователю координат, который соединен с четвертым и вторым сумматорами, а блок интерфейса связан с персональным компьютером.
Предлагаемое устройство позволяет улучшить динамические характеристики и повысить надежность управления асинхронным двигателем за счет использования нечеткого регулятора скорости совместно с ПИ-регулятором скорости, а также наблюдателя Люенбергера, связанного с двумя сумматорами. Улучшение динамических характеристик электропривода обеспечивается нечетким регулятором скорости, который позволяет уменьшить динамический провал скорости двигателя при воздействии возмущающих сигналов. Совместное применение ПИ-регулятора скорости с нечетким регулятором обеспечивает астатизм электропривода по возмущению. Использование наблюдателя Люенбергера позволяет повысить надежность управления асинхронным двигателем за счет отказа от механических датчиков скорости и потокосцепления ротора, при этом простое математическое описание наблюдателя позволяет уменьшить вычислительную ресурсоемкость микроконтроллера, требуемую для процедуры восстановления неизмеряемых координат электропривода - скорости и потокосцепления ротора.
На фиг. 1 изображена структурная схема устройства управления асинхронным двигателем.
Устройство управления асинхронным двигателем содержит автономный инвертор напряжения 1 (АИН), силовые выходы которого через датчики фазных токов 2, 3, 4 (ДТ) подключены к статорным обмоткам асинхронного двигателя 5 (М). Силовые входы автономного инвертора напряжения 1 (АИН) соединены с выходами неуправляемого выпрямителя 6 (НВ), входы которого подключены к источнику трехфазного переменного напряжения 7 (ИТПН). Управляющие входы автономного инвертора напряжения 1 (АИН) через блок драйверов 8 (БД) соединены с выходами ШИМ-генератора 9 (ШИМ-Г). К блоку интерфейса 10 (БИ) последовательно подключены входной фильтр 11 (ВФ), первый сумматор 12 (С1), ПИ-регулятор скорости 13 (ПИ-РС), второй сумматор 14 (С2), первый ПИ-регулятор тока 15 (ПИ-РТ 1), первый преобразователь координат 16 (ПК 1), второй преобразователь координат 17 (ПК 2), наблюдатель Люенбергера 18 (НЛ), третий сумматор 19 (С3), ПИ-регулятор потокосцепления 20 (ПИ-РП), четвертый сумматор 21 (С4), второй ПИ-регулятор тока 22 (ПИ-РТ 2), первый преобразователь координат 16 (ПК 1), ШИМ-генератор 9 (ШИМ-Г). Блок интерфейса 10 (БИ) связан с третьим сумматором 19 (С3). Первый сумматор 12 (С1) соединен с нечетким регулятором скорости 23 (Н-РС), выход которого подключен ко второму сумматору 14 (С2). Наблюдатель Люенбергера 18 (НЛ) связан с первым сумматором 12 (С1), первым преобразователем координат 16 (ПК 1) и третьим преобразователем координат 24 (ПК 3). Датчики фазных токов 2, 3, 4 (ДТ) соединены со вторым преобразователем координат 17 (ПК 2), выходы которого подключены к третьему преобразователю координат 24 (ПК 3), который соединен с четвертым сумматором 21 (С4) и со вторым сумматором 14 (С2). Блок интерфейса 10 (БИ) связан с персональным компьютером (не показан на фиг.1).
В качестве датчиков фазных токов 2, 3, 4 (ДТ) могут быть использованы датчики тока - промышленный прибор КЭИ-0,1. Неуправляемый выпрямитель 6 (НВ) и автономный инвертор напряжения 1 (АИН) конструктивно выполнены в одном устройстве - преобразователе частоты, в качестве которого может быть использован преобразователь частоты VLT FC 300 фирмы Danfoss. Блок драйверов 8 (БД) может быть выполнен на драйверах типа ДРИ11-10-12-1 ОМ1К-1 для управления IGBT модулями. ПИ-регулятор скорости 13 (ПИ-РС), ПИ-регулятор потокосцепления 20 (ПИ-РП), первый ПИ-регулятор тока 15 (ПИ-РТ 1) и второй ПИ-регулятор тока 22 (ПИ-РТ 2) могут быть выполнены на операционных усилителях типа 157УД4 с конденсатором в цепи обратной связи. Сумматоры 12 (С1), 14 (С2), 19 (С3) и 21 (С4) могут быть выполнены на операционных усилителях типа 157УД4. Входной фильтр 11 (ВФ) представляет собой апериодическое звено первого порядка и может быть выполнен на базе RC-цепочки. Первый преобразователь координат 16 (ПК 1), второй преобразователь координат 17 (ПК 2), третий преобразователь координат 24 (ПК 3), нечеткий регулятор скорости 23 (Н-РС), наблюдатель Люенбергера 18 (НЛ) и ШИМ-генератор 9 (ШИМ-Г) могут быть выполнены на базе микроконтроллера типа TMS320F2812 фирмы Texas Instruments. Блок интерфейса 10 (БИ) может быть реализован на базе последовательного преобразователя интерфейса RS-232.
При включении устройства с персонального компьютера поступает сигнал управления на блок интерфейса 10 (БИ), от которого одновременно подаются команды задания на потокосцепление и на скорость вращения асинхронного двигателя 5 (М) на третий сумматор 19 (С3) и входной фильтр 11 (ВФ) соответственно. От входного фильтра 11 (ВФ) сигнал поступает на первый сумматор 12 (С1), в котором суммируется с отрицательным значением сигнала оценки скорости от наблюдателя Люенбергера 18 (НЛ). От первого сумматора 12 (С1) сигнал поступает одновременно на нечеткий регулятор скорости 23 (Н-РС) и ПИ-регулятор скорости 13 (ПИ-РС). Далее сигналы с нечеткого регулятора скорости 23 (Н-РС) и ПИ-регулятора скорости 13 (ПИ-РС) идут на второй сумматор 14 (С2), где суммируются с отрицательным значением сигнала проекции вектора тока статора на ось ординат вращающейся системы координат от третьего преобразователя координат 24 (ПК 3). Со второго сумматора 14 (С2) сигнал поступает на первый ПИ-регулятор тока 15 (ПИ-РТ 1). В третьем сумматоре 19 (С3) происходит суммирование команды задания на потокосцепление и отрицательного значения сигнала оценки потокосцепления с наблюдателя Люенбергера 18 (НЛ). Далее сигнал поступает на ПИ-регулятор потокосцепления 20 (ПИ-РП), с которого идет на четвертый сумматор 21 (С4), где суммируется с отрицательным значением сигнала проекции вектора тока статора на ось абсцисс вращающейся системы координат с третьего преобразователя координат 24 (ПК 3). С четвертого сумматора 21 (С4) сигнал поступает на второй ПИ-регулятор тока 22 (ПИ-РТ 2). На первый преобразователь координат 16 (ПК 1) одновременно поступают сигналы с первого ПИ-регулятора тока 15 (ПИ-РТ 1), второго ПИ-регулятора тока 22 (ПИ-РТ 2) и сигнал оценки угла поворота вектора потокосцепления с наблюдателя Люенбергера 18 (НЛ). С первого преобразователя координат 16 (ПК 1) сигналы фазных напряжений одновременно поступают на ШИМ-генератор 9 (ШИМ-Г) и на второй преобразователь координат 17 (ПК 2). С ШИМ-генератора 9 (ШИМ-Г) сигналы идут на блок драйверов 8 (БД). На второй преобразователь координат 17 (ПК 2) также поступают сигналы с датчиков фазных токов 2, 3, 4 (ДТ). Со второго преобразователя координат 17 (ПК 2) проекции векторов тока и напряжения статора на оси неподвижной системы координат поступают на наблюдатель Люенбергера 18 (НЛ). На третий преобразователь координат 24 (ПК 3) поступают сигналы проекций вектора тока статора на оси неподвижной системы координат со второго преобразователя координат 17 (ПК 2). С источника трехфазного переменного напряжения 7 (ИТПН) сигналы поступают на неуправляемый выпрямитель 6 (НВ). На автономный инвертор напряжения 1 (АИН) одновременно поступают сигнал выпрямленного напряжения с неуправляемого выпрямителя 6 (НВ) и сигналы управления силовыми ключами инвертора с блока драйверов 8 (БД). С автономного инвертора напряжения 1 (АИН) сигналы поступают на датчики фазных токов 2, 3, 4 (ДТ) и далее на статорные обмотки асинхронного двигателя 5 (М). Таким образом заявляемое устройство позволяет регулировать скорость и потокосцепление асинхронного двигателя 5 (М).
Устройство управления асинхронным двигателем, содержащее автономный инвертор напряжения, наблюдатель состояния и блок драйверов, выходы которых соединены с управляющими входами автономного инвертора напряжения, отличающееся тем, что силовые выходы автономного инвертора напряжения через датчики токов подключены к статорным обмоткам асинхронного двигателя, а силовые входы автономного инвертора напряжения соединены с выходами неуправляемого выпрямителя, входы которого подключены к источнику трехфазного переменного напряжения, в качестве наблюдателя состояния выбран наблюдатель Люенбергера, блок драйверов соединен с выходами ШИМ-генератора, к блоку интерфейса последовательно подключены входной фильтр, первый сумматор, ПИ-регулятор скорости, второй сумматор, первый ПИ-регулятор тока, первый и второй преобразователи координат, наблюдатель Люенбергера, третий сумматор, ПИ-регулятор потокосцепления, четвертый сумматор, второй ПИ-регулятор тока, первый преобразователь координат, ШИМ-генератор, при этом блок интерфейса подключен к третьему сумматору, первый сумматор соединен с нечетким регулятором скорости, выход которого подключен ко второму сумматору, а наблюдатель Люенбергера соединен с первым сумматором, первым и третьим преобразователями координат, причем выходы датчиков токов соединены с входами второго преобразователя координат, выходы которого подключены к третьему преобразователю координат, который соединен с четвертым и вторым сумматорами, а блок интерфейса связан с персональным компьютером.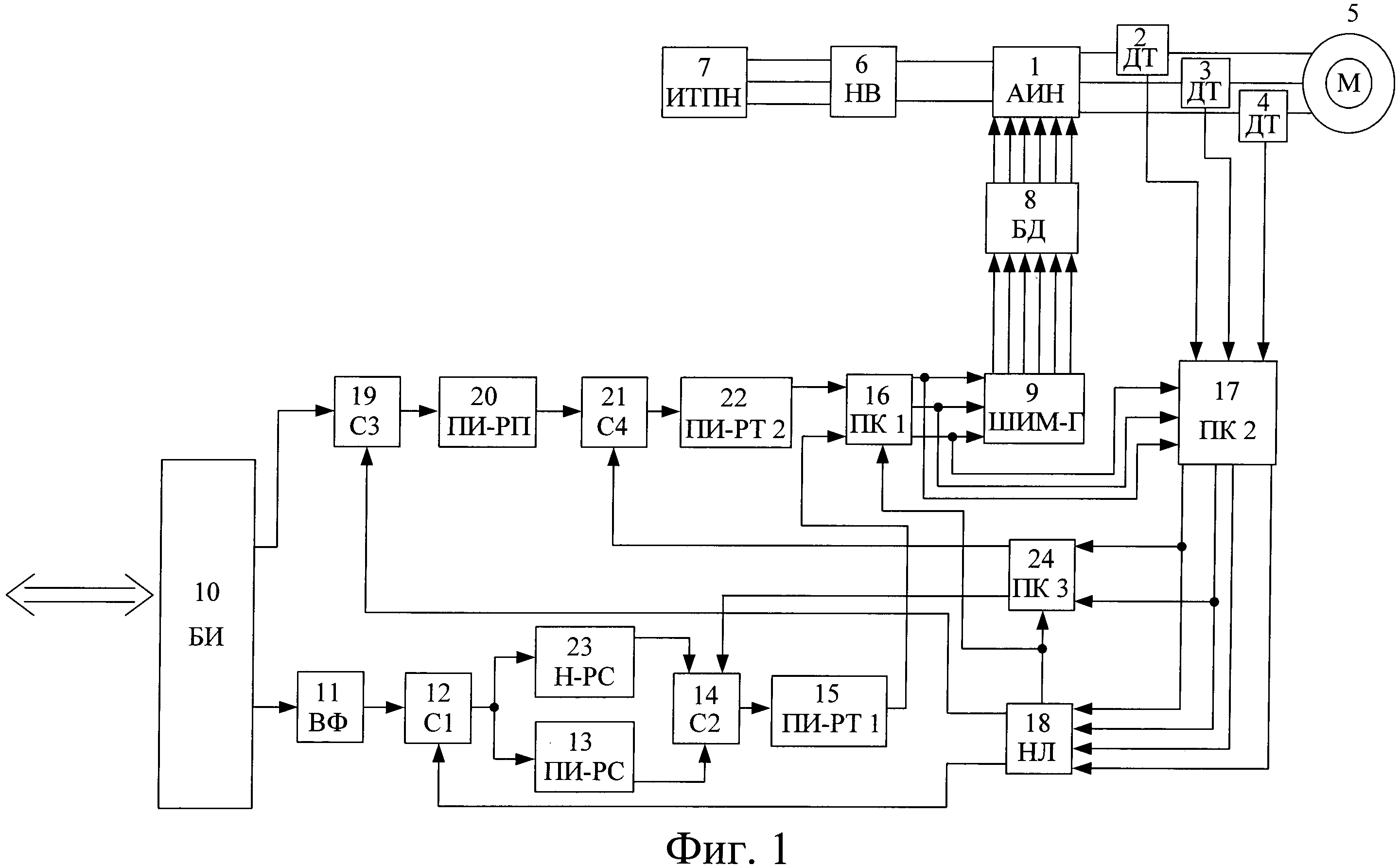
edrid.ru
Полезная модель относится к электротехнике, в частности к регулируемым электроприводам переменного тока. Технический результат заключается в уменьшении тока статора, обеспечивающего заданный момент двигателя, упрощении и повышении работоспособности устройства. В электропривод переменного тока, содержащий асинхронный двигатель с фазным ротором и преобразователь частоты с инвертором тока и релейным регулятором, введены два датчика тока ротора, блок задания частоты вращения поля статора и амплитуды напряжения, блок коррекции задания напряжения, содержащий блок вычислительных операций, осуществляющий выработку корректирующего сигнала задания напряжения в функции рассчитываемого параметра - тангенса угла между векторами тока и потокосцепления ротора, вычисляемого на основании измеренных значений фазных токов ротора двигателя. Инвертором формируются фазные напряжения статора с частотой и амплитудой, необходимой для обеспечения заданного значения момента при условии минимизации потребления тока статора из сети. Электропривод работает с реально измеряемыми фазными токами ротора, что упрощает алгоритм расчета корректирующего сигнала и снижает требования к управляющему контроллеру. 1 с.п. ф-лы, 1 илл.
Полезная модель относится к электротехнике, в частности к регулируемым электроприводам переменного тока, и может использоваться для минимизации потребляемого тока статора при питании асинхронного электродвигателя с фазным ротором от преобразователя частоты.
Известно устройство управления электроприводом переменного тока, содержащее асинхронный двигатель, трехфазный инвертор с ШИМ-регулятором тока, два датчика тока статора, с помощью которых реализуются обратные связи по фазным токам статора, датчик скорости, установленный на валу двигателя, с помощью которого реализуется обратная связь по скорости, регулятор скорости, блок расчета задания на момент двигателя, блок расчета задания модуля тока статора, блок задания фазных токов статора, блоки расчета фазных потокосцеплений ротора, блок расчета скольжения, блок задания частоты вращения поля статора, блок коррекции задания момента двигателя, с помощью которого формируется модуль вектора тока статора, в котором корректирующий сигнал определяется путем сравнения заданного и рассчитанного угла между векторами тока статора и потокосцепления ротора, и суммируется с сигналом задания на момент двигателя [1].
Недостатками данного устройства являются сложность и малая точность адаптивных блоков расчета фазных потокосцеплений ротора, параметры которых изменяются при изменении скольжения, а также появление дополнительной погрешности вычисления угла между моментообразующими векторами, обусловленной температурным дрейфом параметров двигателя.
Наиболее близким к полезной модели по технической сути и достигаемому результату является устройство для управления электроприводом переменного тока содержащее выпрямитель, соединенный через сглаживающий реактор с инвертором на полностью управляемых вентилях, имеющим дополнительные отсекающие диоды по числу управляемых вентилей, включенные последовательно с управляемыми вентилями и дополнительные демпфирующие конденсаторы по числу управляемых вентилей, подключенные к точкам соединения отсекающих диодов и управляемых вентилей, фильтрующую конденсаторную батарею, подключенную к выходам инвертора, релейный регулятор тока, датчик скорости, датчики фазных токов статора, датчик тока в выпрямленной цепи, систему управления выпрямителем [2].
Недостатком данного устройства является сложность конструкции, вследствие наличия датчика скорости, установленного на валу двигателя, а также сложность поддержания постоянства скорости при изменении значения момента на валу двигателя.
Целью полезной модели является упрощение и повышение работоспособности схемы управления, поддержание постоянства скорости двигателя и минимума потребления тока статора при изменении момента на валу двигателя, без использовании датчика скорости в системе управления.
Сущность полезной модели заключается в том, что устройство для управления асинхронным двигателем с фазным ротором, содержащее выпрямитель, соединенный через сглаживающий реактор с инвертором на полностью управляемых вентилях, имеющим дополнительные отсекающие диоды по числу управляемых вентилей, включенные последовательно с управляемыми вентилями и дополнительные демпфирующие конденсаторы по числу управляемых вентилей, подключенные к точкам соединения отсекающих диодов и управляемых вентилей, фильтрующую конденсаторную батарею, подключенную к выходам инвертора, также содержит релейный регулятор напряжения, три отрицательных фазных входа релейного регулятора напряжения подключены к трем выходам блока датчиков фазных напряжений статора, три положительных фазных входа релейного регулятора напряжения подключены к трем фазным выходам блока формирования мгновенных значений фазных напряжений, частотный вход которого соединен с первым частотным выходом блока задания сигналов управления, амплитудный вход блока формирования мгновенных значений фазных напряжений соединен с выходом первого сумматора, один вход которого соединен со вторым амплитудным выходом блока задания сигналов управления, третий выход которого соединен с положительным входом узла сравнения значений тангенса угла между векторами тока статора и потокосцепления ротора, выход которого соединен со входом блока коррекции напряжения, выход которого соединен со вторым входом первого сумматора, два фазных вывода ротора через датчики тока соединены в общую точку, к которой также напрямую подключен третий фазный вывод ротора, выходы двух датчиков тока соединены с входами сумматора фазных токов ротора, а также соединены с фазными входами блока вычисления тангенса угла между векторами тока статора и потокосцепления ротора, выход сумматора фазных токов ротора соединен с третьим входом, блока вычисления тангенса угла между векторами тока статора и потокосцепления ротора, выход которого соединен со вторым входом узла сравнения значений тангенса угла между векторами тока статора и потокосцепления ротора.
На фиг.1 приведена функциональная схема устройства для управления асинхронным двигателем с фазным ротором.
Устройство управления асинхронным двигателем с фазным ротором содержит выпрямитель 1 и инвертор 2, соединенные между собой через сглаживающий реактор 3, выходы инвертора 2 подключены к статору электродвигателя с фазным ротором 4. Инвертор выполнен по мостовой схеме на полностью управляемых вентилях - IGBT-транзисторах 5. В анодную и катодную группы инвертора последовательно с управляемыми вентилями включены дополнительные отсекающие диоды 6 и 7 по числу управляемых вентилей, и дополнительные буферные блоки конденсаторов 8 и 9, подключенные к точкам соединения отсекающих диодов и управляемых вентилей между каждым диодным и IGBT-транзисторным полумостом. К выходам инвертора подключена фильтрующая конденсаторная батарея 10. На выводах ПЧ установлен блок датчиков фазных напряжений статора 11, выходы которого соединены с отрицательными фазными входами релейного регулятора напряжения 12, имеющего узлы сравнения фазных напряжений 13, 14, 15 и релейный блок 16 формирования импульсов на IGBT-транзисторы, положительные фазные входы релейного регулятора напряжения 12 соединены с фазными выходами блока 17 формирования мгновенных значений фазных напряжений, частотный вход которого соединен с первым частотным выходом блока 18 задания сигналов управления, амплитудный вход блока формирования мгновенных значений фазных напряжений 17 соединен с выходом первого сумматора 19, один вход которого соединен со вторым амплитудным выходом блока задания сигналов управления 18, третий выход которого соединен с положительным входом узла сравнения тангенса угла 20, выход которого соединен со входом блока коррекции напряжения 21, выход которого соединен со вторым входом первого сумматора 19, два фазных вывода ротора через датчики тока 22, 23 соединены в общую точку, к которой также напрямую подключен третий фазный вывод ротора двигателя 4, выходы двух датчиков тока соединены с входами сумматора 24 фазных токов ротора, а также соединены с фазными входами блока 25 вычисления тангенса угла между векторами тока и потокосцепления ротора, выход сумматора фазных токов ротора 24 соединен с третьим входом блока вычисления тангенса угла между векторами тока и потокосцепления ротора 25, выход которого соединен со вторым отрицательным входом узла сравнения тангенса угла между векторами тока и потокосцепления ротора 20.
Устройство работает следующим образом. Инвертор тока 2 питает статорные обмотки асинхронного двигателя 4 релейно-модулируемыми пульсациями силового тока, длительность которых определяется управляющими пульсациями, поступающими с выхода релейного блока 16, осуществляющего регулирование напряжения по синусоидальной огибающей с отклонением от нее на величину зоны нечувствительности релейного блока 16.
На положительные входы сумматоров 13, 14, 15 релейного регулятора напряжения 12 поступают с выхода блока 17 сигналы задания на напряжение каждой из фаз  ,
,  ,
,  в виде синусоидального сигнала требуемой амплитуды
в виде синусоидального сигнала требуемой амплитуды  и частоты со
и частоты со 

С выхода блока 11 на отрицательные входы сумматоров 13, 14, 15 релейного регулятора напряжения 12 поступают сигналы обратной связи по напряжению фаз u1a , u1в, u1c. В результате сравнения этих сигналов на выходах блоков 13, 14, 15 получаем разницу между заданным и действительным значениями напряжения в фазах статора:

Полученные сигналы поступают на входы релейного блока 16 имеющего гистерезис, работающего по следующему алгоритму:

где  - модуль гистерезиса, задаваемый из условия точности поддержания напряжения статора.
- модуль гистерезиса, задаваемый из условия точности поддержания напряжения статора.
Величина модуля гистерезиса может быть принята:

где U1н - действующее значение номинального напряжения статора.
Блок 16 формирует сигналы управления IGBT-транзисторами инвертора 2. При нарушении верхней границы напряжения  инвертор 2 формирует отрицательный импульс тока, который разряжает в соответствующей фазе конденсатор 10, понижая напряжение на нем и в фазе статора двигателя. В случае нарушения нижней границы напряжения
инвертор 2 формирует отрицательный импульс тока, который разряжает в соответствующей фазе конденсатор 10, понижая напряжение на нем и в фазе статора двигателя. В случае нарушения нижней границы напряжения  инвертор 2 формирует положительный импульс тока, конденсатор соответствующей фазы 10 заряжается, повышая напряжение соответствующей фазы статора двигателя.
инвертор 2 формирует положительный импульс тока, конденсатор соответствующей фазы 10 заряжается, повышая напряжение соответствующей фазы статора двигателя.
Сигналы требуемой амплитуды  и частоты
и частоты  формирует блок задания сигналов управления 18. Эти сигналы поступают на вход блока формирования мгновенных значений фазных напряжений 17, причем с сигналом
формирует блок задания сигналов управления 18. Эти сигналы поступают на вход блока формирования мгновенных значений фазных напряжений 17, причем с сигналом  складывается на сумматоре 19 сигнал коррекции напряжения U, и на выходе сумматора 19 формируется сигнал
складывается на сумматоре 19 сигнал коррекции напряжения U, и на выходе сумматора 19 формируется сигнал  .
.
При пуске двигателя и регулировании его частоты вращения блок задания сигналов управления 18 реализует изменение сигналов задания и в соответствии с запрограммированным в этом блоке рассчитанным на номинальную нагрузку законом частотного управления  . При изменении условий работы электропривода, в частности изменения нагрузки на валу двигателя и регулировании частоты вращения, для обеспечения минимального значения тока статора при заданном значении статического момента на валу двигателя необходимо изменять амплитуду напряжения
. При изменении условий работы электропривода, в частности изменения нагрузки на валу двигателя и регулировании частоты вращения, для обеспечения минимального значения тока статора при заданном значении статического момента на валу двигателя необходимо изменять амплитуду напряжения  так, чтобы угол между векторами тока статора и потокосцепления ротора
так, чтобы угол между векторами тока статора и потокосцепления ротора  был близок к 45°, тогда
был близок к 45°, тогда  .
.
Уравнение связи между током статора и потокосцеплением ротора, представленными в операторной форме, являющееся передаточной функцией, имеет вид

где


где  - приведенная индуктивность рассеивания обмотки ротора, Lm - индуктивность намагничивания;
- приведенная индуктивность рассеивания обмотки ротора, Lm - индуктивность намагничивания;  - приведенное активное сопротивление обмотки ротора; s
- приведенное активное сопротивление обмотки ротора; s относительное скольжение; T2 - постоянная времени цепи ротора;
относительное скольжение; T2 - постоянная времени цепи ротора;  1 - круговая частота тока статора; 2 - круговая частота тока ротора.
1 - круговая частота тока статора; 2 - круговая частота тока ротора.
Выражение для расчета угла между током статора и потокосцеплением ротора при частоте тока статора 1 имеет вид

Тангенс угла между этими переменными определяется

Значение круговой частоты тока ротора 2 определяется в блоке 25 на основании обработки измеренных мгновенных значений фазных токов ротора.
На положительный вход блока сравнения 20 поступает с третьего выхода блока 18 заданное значение  , а на отрицательный вход - с блока 25 рассчитанное по выражению (9) значение
, а на отрицательный вход - с блока 25 рассчитанное по выражению (9) значение  . Величина сигнала коррекции напряжения U определяется в блоке коррекции 21 согласно алгоритму, работающему следующим образом. Если
. Величина сигнала коррекции напряжения U определяется в блоке коррекции 21 согласно алгоритму, работающему следующим образом. Если  , то на очередном (n+1) шаге расчета происходит уменьшение приращения U к напряжению с шагом убывания
, то на очередном (n+1) шаге расчета происходит уменьшение приращения U к напряжению с шагом убывания  , пока угол
, пока угол  не станет равным 45°, a
не станет равным 45°, a  , если
, если  , то происходит увеличение приращения U к напряжению с шагом возрастания , если
, то происходит увеличение приращения U к напряжению с шагом возрастания , если  , то значение приращения U к напряжению не изменяется. Считывание мгновенных значений происходит циклически с дискретностью, определяемой быстродействием системы.
, то значение приращения U к напряжению не изменяется. Считывание мгновенных значений происходит циклически с дискретностью, определяемой быстродействием системы.
Поддержание постоянства позволяет поддерживать на постоянном уровне частоту тока ротора и, следовательно, разницу между частотой вращения поля статора и частотой вращения ротора. Поэтому при изменении нагрузки на валу при постоянстве частоты вращения поля статора поддерживается постоянство частоты вращения ротора.
Преимущество предлагаемого электропривода переменного тока заключается в простоте конструкции, высокой работоспособности схемы управления, минимизации тока статора, обеспечивающего заданный момент двигателя, за счет более простого и точного определения требуемого сигнала коррекции напряжения, выполняемого на основании сравнения заданного и вычисленного тангенса угла между векторами тока статора и потокосцепления ротора, определяемого с помощью измеренных мгновенных значений тока ротора.
Источники информации.
1. Патент РФ  2447573 МПК Н02 27/04. Электропривод переменного тока. В.Н.Мещеряков, Зотов В.А., Мещерякова О.В. Опубл. 10.04.2012. Бюл.10.
2447573 МПК Н02 27/04. Электропривод переменного тока. В.Н.Мещеряков, Зотов В.А., Мещерякова О.В. Опубл. 10.04.2012. Бюл.10.
2. Патент на полезную модель РФ 112554. Н02 27/06. Устройство для управления асинхронным электроприводом. В.Н.Мещеряков, Башлыков A.M., Безденежных Д.В. Опубл. 10.01.2012. Бюл.1.
Устройство для управления асинхронным двигателем с фазным ротором, содержащее выпрямитель, соединенный через сглаживающий реактор с инвертором на полностью управляемых вентилях, имеющим дополнительные отсекающие диоды по числу управляемых вентилей, включенные последовательно с управляемыми вентилями и дополнительные демпфирующие конденсаторы по числу управляемых вентилей, подключенные к точкам соединения отсекающих диодов и управляемых вентилей, фильтрующую конденсаторную батарею, подключенную к выходам инвертора, релейный регулятор, отличающееся тем, что релейный регулятор является регулятором напряжения, три отрицательных фазных входа релейного регулятора напряжения подключены к трем выходам блока датчиков фазных напряжений статора, три положительных фазных входа релейного регулятора напряжения подключены к трем фазным выходам блока формирования мгновенных значений фазных напряжений, частотный вход которого соединен с первым частотным выходом блока задания сигналов управления, амплитудный вход блока формирования мгновенных значений фазных напряжений соединен с выходом первого сумматора, один вход которого соединен со вторым амплитудным выходом блока задания сигналов управления, третий выход которого соединен с положительным входом узла сравнения значений тангенса угла между векторами тока и потокосцепления ротора, выход которого соединен со входом блока коррекции напряжения, выход которого соединен со вторым входом первого сумматора, два фазных вывода ротора через датчики тока соединены в общую точку, к которой также напрямую подключен третий фазный вывод ротора, выходы двух датчиков тока соединены с входами сумматора фазных токов ротора, а также соединены с фазными входами блока вычисления тангенса угла между векторами тока статора и потокосцепления ротора, выход сумматора фазных токов ротора соединен с третьим входом блока вычисления тангенса угла между векторами тока статора и потокосцепления ротора, выход которого соединен со вторым входом узла сравнения значений тангенса угла между векторами тока статора и потокосцепления ротора.

poleznayamodel.ru
Изобретение относится к электротехнике. Технический результат заключается в повышении надежности. Для этого заявленное устройство содержит автономный инвертор напряжения, силовые выходы которого подключены через датчики токов к статорным обмоткам асинхронного двигателя, наблюдатель состояния и блок драйверов, выходы которых соединены с управляющими входами автономного инвертора напряжения, при этом силовые входы автономного инвертора напряжения соединены с выходами неуправляемого выпрямителя, входы которого подключены к источнику трехфазного переменного напряжения, блок драйверов соединен с выходами ШИМ-генератора, причем в качестве наблюдателя состояния выбран наблюдатель Люенбергера, в заявленном устройстве также блок интерфейса последовательно соединен с входным фильтром, первым сумматором, ПИ-регулятором скорости, вторым сумматором, первым ПИ-регулятором тока, первым и вторым преобразователями координат, наблюдателем Люенбергера, третьим сумматором, ПИ-регулятором потокосцепления, четвертым сумматором, вторым ПИ-регулятором тока, первым преобразователем координат и ШИМ-генератором. Блок интерфейса подключен к третьему сумматору. Первый сумматор соединен с нечетким регулятором скорости, выход которого подключен ко второму сумматору. Наблюдатель Люенбергера соединен с первым сумматором, первым и третьим преобразователями координат. Выходы вышеуказанных датчиков тока соединены со входами второго преобразователя координат, а блок интерфейса связан с персональным компьютером. 1 ил.
Изобретение относится к области электротехники, а именно к управлению асинхронными двигателями.
Известно устройство управления асинхронным электродвигателем, содержащее асинхронный двигатель, ШИМ-инвертор, датчик скорости, преобразователь координат, регулятор тока, интегратор, генератор команд на изменение тока, схемы формирования команд на изменение напряжения, команд на изменение угловой частоты вращения, команд на изменение глубины модуляции, сигналов управления ШИМ-инвертором (RU патент №2193814, МПК 7 Н02Р 21/00, опубл. 27.11.2002 г.).
Недостатком известного устройства управления является то, что для его функционирования необходимо оборудовать двигатель датчиком скорости, что снижает область применения данного устройства управления.
Известна система управления асинхронным двигателем, которая выбрана в качестве прототипа, состоящая из блока ввода заданной частоты вращения асинхронного двигателя, блока рассогласования, регулятора напряжения, блока драйверов, выходы которых соединены с управляющими входами автономного инвертора напряжения, автономного инвертора напряжения, датчика текущей частоты вращения асинхронного двигателя, блока вычисления синхронной частоты вращения асинхронного двигателя, наблюдателя состояния (RU патент №2390091, МПК 8 Н02Р 21/08, Н02Р 21/13, Н02Р 23/08, Н02Р 27/06, опубл. 20.05.2010 г.).
Недостатком известной системы управления является то, что для вычисления электрической частоты вращения ротора двигателя наблюдателем состояния необходимо использование датчика скорости, что снижает надежность данной системы.
Задачей изобретения является повышение надежности управления электродвигателем.
Поставленная задача решена за счет того, что устройство управления асинхронным двигателем также как и в прототипе содержит автономный инвертор напряжения, наблюдатель состояния и блок драйверов, выходы которых соединены с управляющими входами автономного инвертора напряжения.
Согласно изобретению силовые выходы автономного инвертора напряжения через датчики токов подключены к статорным обмоткам асинхронного двигателя, а силовые входы автономного инвертора напряжения соединены с выходами неуправляемого выпрямителя, входы которого подключены к источнику трехфазного переменного напряжения. В качестве наблюдателя состояния выбран наблюдатель Люенбергера. Блок драйверов соединен с выходами ШИМ-генератора. К блоку интерфейса последовательно подключены входной фильтр, первый сумматор, ПИ-регулятор скорости, второй сумматор, первый ПИ-регулятор тока, первый преобразователь координат, второй преобразователь координат, наблюдатель Люенбергера, третий сумматор, ПИ-регулятор потокосцепления, четвертый сумматор, второй ПИ-регулятор тока, первый преобразователь координат, ШИМ-генератор. Блок интерфейса подключен к третьему сумматору. Первый сумматор соединен с нечетким регулятором скорости, выход которого подключен ко второму сумматору. Наблюдатель Люенбергера соединен с первым сумматором, первым и третьим преобразователями координат. Выходы датчиков токов соединены со входами второго преобразователя координат, выходы которого подключены к третьему преобразователю координат, который соединен с четвертым и вторым сумматорами, а блок интерфейса связан с персональным компьютером.
Предлагаемое устройство позволяет улучшить динамические характеристики и повысить надежность управления асинхронным двигателем за счет использования нечеткого регулятора скорости совместно с ПИ-регулятором скорости, а также наблюдателя Люенбергера, связанного с двумя сумматорами. Улучшение динамических характеристик электропривода обеспечивается нечетким регулятором скорости, который позволяет уменьшить динамический провал скорости двигателя при воздействии возмущающих сигналов. Совместное применение ПИ-регулятора скорости с нечетким регулятором обеспечивает астатизм электропривода по возмущению. Использование наблюдателя Люенбергера позволяет повысить надежность управления асинхронным двигателем за счет отказа от механических датчиков скорости и потокосцепления ротора, при этом простое математическое описание наблюдателя позволяет уменьшить вычислительную ресурсоемкость микроконтроллера, требуемую для процедуры восстановления неизмеряемых координат электропривода - скорости и потокосцепления ротора.
На фиг. 1 изображена структурная схема устройства управления асинхронным двигателем.
Устройство управления асинхронным двигателем содержит автономный инвертор напряжения 1 (АИН), силовые выходы которого через датчики фазных токов 2, 3, 4 (ДТ) подключены к статорным обмоткам асинхронного двигателя 5 (М). Силовые входы автономного инвертора напряжения 1 (АИН) соединены с выходами неуправляемого выпрямителя 6 (НВ), входы которого подключены к источнику трехфазного переменного напряжения 7 (ИТПН). Управляющие входы автономного инвертора напряжения 1 (АИН) через блок драйверов 8 (БД) соединены с выходами ШИМ-генератора 9 (ШИМ-Г). К блоку интерфейса 10 (БИ) последовательно подключены входной фильтр 11 (ВФ), первый сумматор 12 (С1), ПИ-регулятор скорости 13 (ПИ-РС), второй сумматор 14 (С2), первый ПИ-регулятор тока 15 (ПИ-РТ 1), первый преобразователь координат 16 (ПК 1), второй преобразователь координат 17 (ПК 2), наблюдатель Люенбергера 18 (НЛ), третий сумматор 19 (С3), ПИ-регулятор потокосцепления 20 (ПИ-РП), четвертый сумматор 21 (С4), второй ПИ-регулятор тока 22 (ПИ-РТ 2), первый преобразователь координат 16 (ПК 1), ШИМ-генератор 9 (ШИМ-Г). Блок интерфейса 10 (БИ) связан с третьим сумматором 19 (С3). Первый сумматор 12 (С1) соединен с нечетким регулятором скорости 23 (Н-РС), выход которого подключен ко второму сумматору 14 (С2). Наблюдатель Люенбергера 18 (НЛ) связан с первым сумматором 12 (С1), первым преобразователем координат 16 (ПК 1) и третьим преобразователем координат 24 (ПК 3). Датчики фазных токов 2, 3, 4 (ДТ) соединены со вторым преобразователем координат 17 (ПК 2), выходы которого подключены к третьему преобразователю координат 24 (ПК 3), который соединен с четвертым сумматором 21 (С4) и со вторым сумматором 14 (С2). Блок интерфейса 10 (БИ) связан с персональным компьютером (не показан на фиг.1).
В качестве датчиков фазных токов 2, 3, 4 (ДТ) могут быть использованы датчики тока - промышленный прибор КЭИ-0,1. Неуправляемый выпрямитель 6 (НВ) и автономный инвертор напряжения 1 (АИН) конструктивно выполнены в одном устройстве - преобразователе частоты, в качестве которого может быть использован преобразователь частоты VLT FC 300 фирмы Danfoss. Блок драйверов 8 (БД) может быть выполнен на драйверах типа ДРИ11-10-12-1 ОМ1К-1 для управления IGBT модулями. ПИ-регулятор скорости 13 (ПИ-РС), ПИ-регулятор потокосцепления 20 (ПИ-РП), первый ПИ-регулятор тока 15 (ПИ-РТ 1) и второй ПИ-регулятор тока 22 (ПИ-РТ 2) могут быть выполнены на операционных усилителях типа 157УД4 с конденсатором в цепи обратной связи. Сумматоры 12 (С1), 14 (С2), 19 (С3) и 21 (С4) могут быть выполнены на операционных усилителях типа 157УД4. Входной фильтр 11 (ВФ) представляет собой апериодическое звено первого порядка и может быть выполнен на базе RC-цепочки. Первый преобразователь координат 16 (ПК 1), второй преобразователь координат 17 (ПК 2), третий преобразователь координат 24 (ПК 3), нечеткий регулятор скорости 23 (Н-РС), наблюдатель Люенбергера 18 (НЛ) и ШИМ-генератор 9 (ШИМ-Г) могут быть выполнены на базе микроконтроллера типа TMS320F2812 фирмы Texas Instruments. Блок интерфейса 10 (БИ) может быть реализован на базе последовательного преобразователя интерфейса RS-232.
При включении устройства с персонального компьютера поступает сигнал управления на блок интерфейса 10 (БИ), от которого одновременно подаются команды задания на потокосцепление и на скорость вращения асинхронного двигателя 5 (М) на третий сумматор 19 (С3) и входной фильтр 11 (ВФ) соответственно. От входного фильтра 11 (ВФ) сигнал поступает на первый сумматор 12 (С1), в котором суммируется с отрицательным значением сигнала оценки скорости от наблюдателя Люенбергера 18 (НЛ). От первого сумматора 12 (С1) сигнал поступает одновременно на нечеткий регулятор скорости 23 (Н-РС) и ПИ-регулятор скорости 13 (ПИ-РС). Далее сигналы с нечеткого регулятора скорости 23 (Н-РС) и ПИ-регулятора скорости 13 (ПИ-РС) идут на второй сумматор 14 (С2), где суммируются с отрицательным значением сигнала проекции вектора тока статора на ось ординат вращающейся системы координат от третьего преобразователя координат 24 (ПК 3). Со второго сумматора 14 (С2) сигнал поступает на первый ПИ-регулятор тока 15 (ПИ-РТ 1). В третьем сумматоре 19 (С3) происходит суммирование команды задания на потокосцепление и отрицательного значения сигнала оценки потокосцепления с наблюдателя Люенбергера 18 (НЛ). Далее сигнал поступает на ПИ-регулятор потокосцепления 20 (ПИ-РП), с которого идет на четвертый сумматор 21 (С4), где суммируется с отрицательным значением сигнала проекции вектора тока статора на ось абсцисс вращающейся системы координат с третьего преобразователя координат 24 (ПК 3). С четвертого сумматора 21 (С4) сигнал поступает на второй ПИ-регулятор тока 22 (ПИ-РТ 2). На первый преобразователь координат 16 (ПК 1) одновременно поступают сигналы с первого ПИ-регулятора тока 15 (ПИ-РТ 1), второго ПИ-регулятора тока 22 (ПИ-РТ 2) и сигнал оценки угла поворота вектора потокосцепления с наблюдателя Люенбергера 18 (НЛ). С первого преобразователя координат 16 (ПК 1) сигналы фазных напряжений одновременно поступают на ШИМ-генератор 9 (ШИМ-Г) и на второй преобразователь координат 17 (ПК 2). С ШИМ-генератора 9 (ШИМ-Г) сигналы идут на блок драйверов 8 (БД). На второй преобразователь координат 17 (ПК 2) также поступают сигналы с датчиков фазных токов 2, 3, 4 (ДТ). Со второго преобразователя координат 17 (ПК 2) проекции векторов тока и напряжения статора на оси неподвижной системы координат поступают на наблюдатель Люенбергера 18 (НЛ). На третий преобразователь координат 24 (ПК 3) поступают сигналы проекций вектора тока статора на оси неподвижной системы координат со второго преобразователя координат 17 (ПК 2). С источника трехфазного переменного напряжения 7 (ИТПН) сигналы поступают на неуправляемый выпрямитель 6 (НВ). На автономный инвертор напряжения 1 (АИН) одновременно поступают сигнал выпрямленного напряжения с неуправляемого выпрямителя 6 (НВ) и сигналы управления силовыми ключами инвертора с блока драйверов 8 (БД). С автономного инвертора напряжения 1 (АИН) сигналы поступают на датчики фазных токов 2, 3, 4 (ДТ) и далее на статорные обмотки асинхронного двигателя 5 (М). Таким образом заявляемое устройство позволяет регулировать скорость и потокосцепление асинхронного двигателя 5 (М).
Устройство управления асинхронным двигателем, содержащее автономный инвертор напряжения, наблюдатель состояния и блок драйверов, выходы которых соединены с управляющими входами автономного инвертора напряжения, отличающееся тем, что силовые выходы автономного инвертора напряжения через датчики токов подключены к статорным обмоткам асинхронного двигателя, а силовые входы автономного инвертора напряжения соединены с выходами неуправляемого выпрямителя, входы которого подключены к источнику трехфазного переменного напряжения, в качестве наблюдателя состояния выбран наблюдатель Люенбергера, блок драйверов соединен с выходами ШИМ-генератора, к блоку интерфейса последовательно подключены входной фильтр, первый сумматор, ПИ-регулятор скорости, второй сумматор, первый ПИ-регулятор тока, первый и второй преобразователи координат, наблюдатель Люенбергера, третий сумматор, ПИ-регулятор потокосцепления, четвертый сумматор, второй ПИ-регулятор тока, первый преобразователь координат, ШИМ-генератор, при этом блок интерфейса подключен к третьему сумматору, первый сумматор соединен с нечетким регулятором скорости, выход которого подключен ко второму сумматору, а наблюдатель Люенбергера соединен с первым сумматором, первым и третьим преобразователями координат, причем выходы датчиков токов соединены с входами второго преобразователя координат, выходы которого подключены к третьему преобразователю координат, который соединен с четвертым и вторым сумматорами, а блок интерфейса связан с персональным компьютером.
www.findpatent.ru