В статье вы узнаете, что такое электродвигатели переменного тока, рассмотрите их устройство, принцип действия, область применения. Стоит отметить, что сегодня в промышленности более 95 процентов всех используемых двигателей приходится на асинхронные машины. Они получили большое распространение в связи с тем, что у них высокая надежность, они могут служить очень долго за счёт своей ремонтопригодности.

Чтобы понять, как функционирует электродвигатель, можно провести небольшой эксперимент. Конечно, для этого потребуется наличие специального инструмента. Установите магнит в форме подковы так, чтобы он приводился в движение при помощи ручки. Как вы знаете, у магнита имеется два полюса. Между ними необходимо расположить цилиндр, изготовленный из меди. С таким расчетом, что он может свободно вокруг своей оси вращаться. Теперь сам эксперимент. Начинаете раскручивать магнит, при этом создается поле, которое двигается. Внутри медного цилиндра начинают возникать вихревые токи, которые противодействуют полю магнита.
В результате этого медный цилиндр начинает вращение в ту сторону, в которую двигается постоянный магнит. Причем его скорость оказывается несколько ниже. Причина этого — при равной скорости силовые линии перестают пересекаться с полем магнита. Магнитное поле вращается синхронно. А вот скорость движения самого магнита несинхронна. А если немножко сократить определение, то асинхронна. Отсюда и название электрической машины — асинхронного электродвигателя. Если грубо, то схема электродвигателя переменного тока примерно такая же, как и в приведенном эксперименте. Только магнитное поле создается статорной обмоткой.

Они несколько отличаются от асинхронных электродвигателей переменного тока. Во-первых, в нём имеется одна или две статорных обмотки. Во-вторых, способ изменения частоты вращения ротора несколько иной. Но направление вращения ротора изменяется переполюсовкой (у асинхронных машин меняются местами фазы питающей сети). Изменить скорость ротора двигателя постоянного тока можно, если увеличить или уменьшить напряжение, подаваемое на статорную обмотку.
Двигатель постоянного тока не может работать без обмотки возбуждения, которая находится на роторе. Передача напряжения происходит при помощи щеточного узла. Это самый ненадежный элемент конструкции. Щетки, изготовленные из графита, со временем стираются, что приводит к выходу из строя мотора, ему необходим ремонт. Заметьте, что электродвигатели постоянного и переменного тока имеют одни и те же элементы, но их конструкции отличаются существенно.

Как и любая другая нестатическая электрическая машина, асинхронный двигатель состоит из двух основных частей — статора и ротора. Первый элемент неподвижный, на нём размещаются три обмотки, которые соединяются по определенной схеме. Ротор является подвижным, его конструкция называется «беличьей клеткой». Причина такого названия в том, что внутреннее устройство очень похоже на колесо с белкой.
Последней, конечно же, нет в электродвигателе. Центровка ротора производится при помощи двух крышек, устанавливаемых на статоре. В них имеются подшипники, которые облегчают вращение. На задней части электродвигателя устанавливается крыльчатка. С ее помощью проводится охлаждение электрической машины. На статоре сделаны ребра, которые улучшают теплоотдачу. Таким образом электродвигатели переменного тока работают в нормальном тепловом режиме.

Стоит отметить, что у статора современных асинхронных электродвигателей полюсы невыраженные. Если говорить проще, то внутри вся поверхность идеально гладкая. В целях уменьшения потерь на вихревых токах, сердечник набирается из очень тонких листов стали. Эти листы очень плотно прилегают друг другу и впоследствии закрепляются в корпусе из стали. Статор имеет пазы для закладывания обмоток.
Обмотки изготовлены из медного провода. Соединение их производится в «звезду» или «треугольник». В верхней части корпуса имеется небольшой щиток, полностью заизолированный. В нем находятся контакты для подключения и соединения обмоток. Причем соединить обмотки можно при помощи перемычек, устанавливаемых в этом щитке. Устройство электродвигателя переменного тока позволяет быстро провести соединение обмоток в нужную схему.

О нем было уже немного сказано. Он похож на беличью клетку. Конструкция ротора собирается из тонких стальных листов, как и статора. В пазах ротора находится обмотка, но она может быть нескольких типов. Все зависит от того, фазный или короткозамкнутый ротор. Наиболее распространенные последние конструкции. Толстые медные стержни укладываются в пазы без изоляционного материала. С обоих концов эти стержни соединяются медными кольцами. Иногда вместо "беличьей клетки" применяются литые роторы.
Но есть еще электродвигатели переменного тока с фазным ротором. Они используются намного реже, в основном для электродвигателей, у которых очень большая мощность. Второй случай, при котором необходимо использовать фазные роторы в электродвигателях — создание большого усилия в момент запуска. Правда, для этого необходимо использовать специальный реостат.
Запустить асинхронный электродвигатель переменного тока несложно, достаточно только подключить статорные обмотки в трехфазную сеть. Производится подключение при помощи магнитных пускателей. Благодаря им можно практически автоматизировать запуск. Даже реверс сделать можно без особых трудностей. Но в некоторых случаях необходимо снижать напряжение, которое подводится к статорным обмоткам.
Производится это благодаря использованию схемы подключения типа «треугольник». При этом запуск производится, когда обмотки соединены по схеме «звезда». При увеличении числа оборотов, достижении максимального значения обмотки необходимо переключить на схему «треугольник». При этом происходит уменьшение потребляемого тока примерно в три раза. Но необходимо учитывать, что не каждый статор может нормально функционировать при подключении по схеме «треугольник».
В промышленности и быту все большую популярность приобретают частотные преобразователи. С их помощью можно легким движением руки изменить скорость вращения ротора. Стоит заметить, что электродвигатели переменного тока используются совместно с частотными преобразователями в большинстве механизмов. Он позволяет осуществить тонкую настройку привода, при этом нет необходимости использовать магнитные пускатели. Все органы управления подключаются к контактам на частотном преобразователе. Настройки позволяют изменять время разгона ротора электродвигателя, его остановки, время минимальной и максимальной скорости, а также множество других защитных функций.
Теперь вы знаете, как происходит работа электродвигателя переменного тока. Даже изучили конструкцию наиболее популярного асинхронного двигателя. Он является самым дешевым из всех, которые представлены на рынке. Кроме того, для его нормального функционирования нет необходимости использовать различные вспомогательные устройства. В частности, реостаты. И только такое дополнение, как частотный преобразователь, способно облегчить эксплуатацию асинхронного электродвигателя, существенно расширить его возможности.
fb.ru
Двигатели электрические выпускают синхронные, асинхронные, коллекторные, каждому присущи особенности работы. Минус большой: сеть интернет дает скудные представления о различиях в работе, принципе действия. Можем читать обзоры про синхронные электродвигатели, не понять в итоге главного: нюансов! Почему на ГЭС используются такие генераторы, в быту моторов-зеркал не видно (двигатель переменного тока обратим)?
Сразу скажем, не ставили целью довести вниманию читателей исчерпывающую информацию по указанной теме. Невозможно объять необъятное. Будут рассматриваться случаи, опущенные литературой. Информация вроде выложен, систематизировать издателям недосуг. Поможем понять, как функционируют виды электродвигателей. Начнем простым перечислением.

Двигатель коллекторного типа
Часто путают с синхронными. Обнаруживаются угольные щетки. Этим сходство ограничивается, частота вращения коллекторных двигателей меняется в широких пределах, каждый может лицезреть на примере стиральной машины. Управление скоростью осуществляется путем коммутации обмоток, подстройкой значения действующего напряжения (изменяется угол отсечки вольтажа промышленной частоты).
Главным отличием устройств является наличие коллектора. Своеобразная секционная конструкция, насаженная на вал. Составлена множеством катушек, равномерно идущих кругом. Коллектор обеспечивает последовательную коммутацию, чтобы поле постепенно двигалось вкруг вала. Цепляясь за статор, ротор начинает движение.
К недостаткам коллекторных двигателей причисляют хрупкость (для промышленности). В быту тип устройств доминирующие. Простым путем осуществляется регулировка скорости (отсечкой части периода синусоиды). Коллекторных двигателей видим другие минусы/плюсы, упоминали ранее, сейчас изучим особенности. Наличие на валу секционированного барабана.
Можно поставить вместо него магнит, вращать поле статора? Да, получим синхронный двигатель (типичный пример — помпы стиральных машин). Можно питать обмотку постоянным током, вращать поле статора? Да, будет синхронный двигатель. Видите, коллектор однозначно дает понять тип устройства.
Чаще применяются промышленностью. Получаем простоту конструкции, кучу плюшек. Ударопрочность, вибропрочность: отсутствие угольных щеток. Взамен получается кипа конструкций. Семейство самое многочисленное.

Асинхронный двигатель
Во-первых, ротор. Может быть короткозамкнутым, фазным. Первое означает: на вал насажена конструкция (для уменьшения веса силуминовая), где вставлены прожилки меди. Закорочено периметром двумя кольцами. Получается барабан, иногда называемый беличьей клеткой.
Возникает поле под действием вращающейся ЭДС статора, в отличие от коллекторных запуск асинхронных двигателей постоянным током не производят. Вторичное отличие. Первичное назвали: к ротору не подходят контакты (исключая пусковой реостат), вал увенчан беличьей клеткой, вывод о принадлежности однозначный. Что касается фазных асинхронных машин, питание катушек ротора производится через токосъемные кольца. Вал подхватывается, постепенно набирает обороты.
Тип устройств, составить понятие о котором, согласно заметкам сети попросту невозможно. Отличие простое: поле настолько сильное, что захватывается без проблем, не проскальзывает, как в случае с асинхронными или (в меньшей степени) коллекторными двигателями. Обеспечивается постоянным магнитом чаще, либо обмотка возбуждения находится на роторе. Статор снабжается переменным напряжением нужной частоты.
Скорость вращения зависит от частоты сети питания. Полюсов только два, поэтому составляет 25 Гц (1500 об/мин). Черта, по которой можно предположить: видим синхронный двигатель — кратное, целое число. Ключевым является совпадение скорости вращения вала и частоты напряжения питания. Многое зависит от количества полюсов. Например, на ГЭС генераторы работают на частоте вала 1-2 Гц, промышленные 50 Гц получаются путем намотки многочисленных катушек статора, соединенных параллельно.
Кратенько описали внешние отличия электрических двигателей, теперь пара слов по поводу устройства и функционирования. Асинхронные двигатели при помощи статора создают по оси вращающееся магнитное поле. Барабан беличьей клетки редко изготавливается из ферромагнитных материалов (если вообще имеет место быть). В противном случае нагрев вышел бы значительным. Фактически получается индукционная печь.
Силуминовый барабан вдоль линий магнитного поля содержит медные проводники. Разница в проводимости такова, что не проводится изоляции: ток несут красно-коричневые жилы. Поле, индуцированное статором ЭДС, слабое. Применяются специальные меры, помогающие разогнать вал. Магнитное поле ротора плохо цепляется, асинхронный двигатель стоит столбом. Действенная мера противодействия проблеме ограничивается созданием двойной беличьей клетки: вдоль барабана проходит на некоторой глубине второй ряд медных жил. Объединены торцами единой сетью.
На запуске частота тока, глубина проникновения поля велики. Включаются в работу оба слоя беличьей клетки. По мере разгона разница нивелируется, падает до нуля. Амплитуда поля снижается, рабочим остается внешний слой беличьей клетки. Обратите внимание, догнать поле ротор бессилен, проскальзывает, запаздывает. Поэтому двигатели получили название асинхронных. Англичане делают проще — зовут индукционными.
Если поле вращать со скоростью ротора, ЭДС перестает наводиться. Последует замедление, цикл повторится, начавшись разгоном. Ротор по-прежнему будет отставать от поля. Так работает устройство короткозамкнутого типа. Фазный ротор (спасибо Википедия), содержащий трехфазную обмотку, выполняет несколько функций, согласно назначению устройства:
Принцип действия асинхронных двигателей: используется наведенная ЭДС, скорость вращения неспособна догнать поле (пропадают токи). Иначе тип мотора меняется (синхронный). Для регуляции скорости часто используется амплитуда питающего напряжения. Способ годится двигателям асинхронного типа с короткозамкнутым, фазным ротором. Перечислим методики:

Работа двигателя переменного тока
Асинхронным двигателям годится изменение амплитуды питания. Наибольшим КПД обладают вентильные схемы, самые дорогие.

Двигатель асинхронного типа
Проходились по коллекторным двигателям – рассказывали, как конструировать – поэтому пропускаем сегодня семейство. Бессильны иначе рассказать вещи гораздо интереснее: ведется много споров на форумах. Собираемся рассмотреть не совсем синхронные двигатели — генератор. Наподобие украшающих ГЭС.
Вы никогда не задумывались, как регулируется скорость вращения турбины, когда на лопасть падает поток воды? Створками направляющего аппарата? Нет. Генератор требует подпитки не только постоянным током, но и переменным. Первое подаётся на ротор, а второе – на статор. В результате вал не мог бы даже стронуться с места, но ему помогает вода. А вот энергия торможения потока уже преобразуется в ЭДС рабочих катушек статора, намотанных рядом со вспомогательными.
Фактически имеем на руках устройство электродвигателя переменного тока, среди обмоток большая часть генерирующих, снимается частота 50 Гц. Синхронность обеспечивается питающими напряжениями. Если вода слишком напирает, ток возбуждения растет, срыв оборотов предотвращается. Параллельно увеличивается выходная мощность электростанции. Частота определяет характеристики снимаемого напряжения, касательно номинала 50 Гц не допускаются отклонения более долей процента (0,1%).
Вал вращается со скоростью 1-2 оборота в секунду. Многочисленными генераторными обмотками, соединенными параллельно образует нужную форму синусоиды. Подчеркиваем, частота поддерживается напряжением возбуждения, следовательно, именно к нему и предъявляются повышенные требования. Требуется получить больше мощности электростанции, просто заслонки направляющего аппарата приоткрываются, масса воды начинает падать вниз. Лопасть быстрее не двигается, увеличивается ток возбуждения, закономерно вызывает возникновение более сильных полей.
Принцип действия электродвигателя переменного тока копирует сказанное, отсутствуют генераторные обмотки. Требуется получить больше мощности — увеличьте напряжение возбуждения, амплитуду по цепи питания. Усиливается сцепление полей, исключая проскальзывание. Понятно, большая масса вала неспособна набрать за мгновение 50 Гц (и не набирает), оборудование, изготовленное правильно, за короткий период достигает режима. Скорость зависит от количества полюсов.
Не успели сегодня рассмотреть технические характеристики электродвигателей переменного тока, многократно делали прежде, применительно к различного рода устройствам. Полагаем, в будущем обзоры могут вновь повернуться к теме бушпритом.
vashtehnik.ru
Двигатели постоянного тока предназначены для превращения энергии постоянного тока в механическую работу.
Электродвигатели постоянного тока, намного меньше распространены, нежели двигатели переменного тока. Это связано в первую очередь со сравнительной дороговизной, более сложным устройством, сложностями в обеспечении питания. Но, несмотря на все эти недостатки, ДПТ имеют немало плюсов. Например, двигатели переменного тока, сложно регулировать, ДПТ же отлично регулируются массой способов. Кроме того ДПТ имеют более жесткие механические характеристики и позволяют обеспечить большой пусковой момент.
Электродвигатели постоянного тока применяются в качестве тяговых двигателей, в электротранспорте, в качестве различных исполнительных устройств.

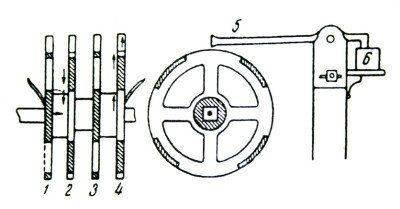
Конструкция двигателя постоянного тока аналогична двигателю переменного тока, но все же имеются существенные различия. На станине 7, которая изготавливается из стали, установлена обмотка возбуждения в виде катушек 6. Между основными полюсами, могут устанавливаться дополнительные полюса 5, для улучшения свойств ДПТ. Внутри устанавливается якорь 4, который состоит из сердечника и коллектора 2, и устанавливается с помощью подшипников 1 в корпус двигателя. Коллектор является существенным отличием от двигателей переменного тока. Он соединяется с щетками 3, что позволяет подавать или в генераторах, наоборот снимать напряжение с якорной цепи.

Принцип действия ДПТ основан на взаимодействии магнитных полей обмотки возбуждения и якоря. Можно представить, что вместо якоря у нас рамка, через которую протекает ток, а вместо обмотки возбуждения постоянный магнит с полюсами N и S. При протекании постоянного тока через рамку, на нее начинает действовать магнитное поле постоянного магнита, то есть рамка начинает вращаться, причем, так как направление тока не меняется, то и направление вращения рамки остается прежним.
При подаче напряжения на зажимы двигателя начинает протекать ток в обмотке якоря, на него, как мы уже знаем, начинает действовать магнитное поле машины, при этом якорь начинает вращаться, а так как якорь вращается в магнитном поле, начинает образовываться ЭДС. Эта ЭДС направлена против тока, в связи с этим её называют противоЭДС. Её можно найти по формуле

Где Ф – магнитный поток возбуждения, n – частота вращения, а Cе это конструктивный момент машины, который остается для нее постоянным.
Напряжение на зажимах больше чем противоЭДС на величину падения напряжение в якорной цепи.

А если домножить это выражение на ток, то получим уравнение баланса мощностей.

Левая часть уравнения UIя представляет собой мощность подаваемая электродвигателю, в правой части первое слагаемое EIя представляет собой электромагнитную мощность, а второе IяRя мощность потерь в цепи якоря.
Рекомендуем прочесть статью - пуск двигателя постоянного тока.
electroandi.ru
|
Электрический двигатель – неоценимое изобретение человека. Благодаря этому устройству наша цивилизация за последние сотни лет ушла далеко вперёд. Это настолько важно, что принцип работы электродвигателя изучают ещё со школьной скамьи. Круговое вращение электроприводного вала легко трансформируется во все остальные виды движения. Поэтому любой станок, созданный для облегчения труда и сокращения времени на изготовление продукции, можно приспособить под выполнение множества задач. Каков же принцип действия электродвигателя, как он работает и каково его устройство – обо всём этом понятным языком рассказывается в представленной статье. Как работает двигатель постоянного тока Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу. Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта). При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки (правило правой руки используется для генераторов, а правило левой руки подходит только для двигателей). Эта сила называется «амперовой» и её величина определяется по закону Ампера F=BхIхL, где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода. Это явление использовали как основной принцип работы первых электродвигателей, этот же принцип используют и поныне. В двигателях постоянного тока малой мощности для создания постоянного магнитного поля применяются постоянные магниты. В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора. Рассмотрим принцип создания механического движения с помощью электричества более подробно. На динамической иллюстрации показан простейший электромотор. В однородном магнитном поле вертикально располагаем проволочную рамку и пропускаем по ней ток. Что происходит? Рамка проворачивается и по инерции двигается какое-то время до достижения горизонтального положения. Это нейтральное положение – мёртвая точка — место, где воздействие поля на проводник с током равно нулю. Чтобы движение продолжилось, нужно добавить ещё хотя бы одну рамку и обеспечить переключение направление тока в рамке в нужный момент. На обучающем видео внизу страницы хорошо виден этот процесс. Принцип действия современных электродвигателей Современный двигатель постоянного тока вместо одной рамки имеет якорь с множеством проводников, уложенных в пазы, а вместо постоянного подковообразного магнита имеет статор с обмоткой возбуждения с двумя и более полясами. На рисунке показан двухполюсный электромотор в разрезе. Принцип его работы следующий. Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Поскольку медный провод уложен в пазах якоря, то, вся сила воздействия будет передаваться и на него, и он будет проворачиваться. Дальше видно, что когда проводник с направлением тока «от нас» провернётся вниз и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и произойдёт торможение. Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя. Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы. Хотя в этом случае используется переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля. Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное. Продолжая тему двигателя постоянного тока нужно отметить, что принцип действия электродвигателя основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось в постоянном ритме. Если изменить направление тока в возбуждающей обмотке статора, то, согласно правилу левой руки, изменится направление вращения ротора. То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко. Что касается электрической то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать. Если делать последовательное соединение обмоток индуктора и якоря, то обмотка индуктора делается из провода большего диаметра с меньшим количеством витков, т.к. весь якорный ток устремляется через статорную обмотку. При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше. На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления. • Скачать лекцию: двигатели постоянного тока
Свежие записи: |
ukrlot.com
| Для привода механизмов кранов и других подъемно-транспортных машин применяются электродвигатели постоянного и трехфазного переменного тока. По своим электромеханическим свойствам электродвигатели постоянного тока наилучшим образом соответствуют условиям работы подъемно-транспортных машин. Но для их питания требуются преобразовательные агрегаты или специальная сеть постоянного тока. Поэтому электродвигатели постоянного тока используют, как правило, для кранов, работающих в особо тяжелых условиях, при частых и значительных перегрузках, а также в тех случаях, когда требуется широкое и плавное регулирование скорости и точная остановка (монтажные краны, быстроходные лифты и т.п.). Электродвигатели постоянного тока различаются по способу возбуждения и по схеме включения обмоток (рис. 4).
Электродвигатель с независимым возбуждением (рис. 4, а) имеет обмотку возбуждения, питаемую от постороннего источника постоянного тока (специального возбудителя, посторонней сети и т. д.). В таком электродвигателе величина тока возбуждения не зависит от его скорости и нагрузки. Электродвигатели с независимым возбуждением для привода подъемно-транспортных машин применяются редко, так как при достаточно мощном источнике питания нет особого различия между работой электродвигателей с параллельным или независимым возбуждением. Поэтому более целесообразно .использовать электродвигатели с параллельным возбуждением, которые не требуют отдельного источника для питания обмотки возбуждения. Электродвигатель с параллельным возбуждением или шунговой электродвигатель (рис. 4, б) имеет обмотку возбуждения, которая подключается к зажимам якоря. Если машина работает в генераторном режиме, то такое подключение обмотки возбуждения приводит к сильной зависимости тока возбуждения от нагрузки. Однако в двигательном режиме этого почти не наблюдается, так как к якорю двигателя подается напряжение, не зависящее от нагрузки. Электродвигатели с параллельным возбуждением могут использоваться для привода лифтов, механизмов подъема, поворота и передвижения кранов.
Электродвигатель с последовательным возбуждением (сериесный электродвигатель) снабжается обмоткой возбуждения (рис. 4, в), соединенной последовательно с обмоткой якоря. Поэтому магнитный поток возбуждения очень сильно зависит от нагрузки электродвигателя. Как правило, такие электродвигатели используются для привода механизмов подъема кранов. Электродвигатель со смешанным возбуждением (компаундный электродвигатель) имеет две обмотки возбуждения: последовательную и параллельную (рис. 4, г). Магнитный поток возбуждения в данном случае в меньшей степени зависит от нагрузки электродвигателя, чем у электродвигателей с последовательным возбуждением. В зависимости от того, какая из двух обмоток создает больший магнитный поток, характеристики электродвигателя со смешанным возбуждением приближаются к характеристикам электродвигателей с параллельным или последовательным возбуждением. Чаще всего такие электродвигатели попользуются для привода механизмов передвижения тележек и мостов кранов. По конструктивному исполнению электродвигатели постоянного тока различного возбуждения ничем практически не отличаются друг от друга. Основными частями кранового электродвигателя постоянного тока (рис. 5) являются станина с полюсами 1 и якорь 3 с коллектором 4. Станина выполняется из стали или чугуна. На ней располагаются главные полюсы 1 с обмотками возбуждения 2. Полюсы набираются из тонких листов специальной электротехнической стали толщиной 0,5— 1 мм. Якорь является вращающейся частью электродвигателя. Он также набирается из штампованных тонких листов стали. В сердечнике якоря имеются пазы, куда закладывается обмотка, которая соединяется с коллектором и через угольные щетки 5 присоединяется к источнику питания через соответствующую пускорегулирующую аппаратуру. Щетки укрепляются в специальных щеткодержателях и при работе машины скользят по гладкой поверхности коллектора. Последний набирается из пластин холоднокатаной электролитической меди, разделенных изоляционными прокладками из миканита (слюда; проклеенная лаком). Часто электродвигатели постоянного тока снабжаются дополнительными полюсами, служащими для уменьшения искрения на коллекторе. Дополнительные полюсы, так же как и главные, крепятся к станине. На них располагается обмотка, включаемая в цепь якоря последовательно. Крупные электродвигатели постоянного тока снабжаются компенсационной обмоткой, которая закладывается в пазы полюсных башмаков (выступающая часть полюсов). Компенсационная обмотка служит для устранения реакции якоря, вызываемой влиянием магнитного потока якоря на основной поток главных полюсов, в результате чего усиливается искрение на коллекторе.
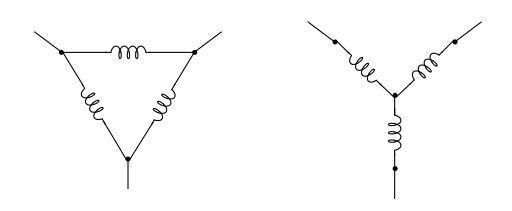
Наибольшее применение для привода механизмов подъемно-транспортных машин получили асинхронные электродвигатели трехфазного тока (рис. 6). Основными частями электродвигателя (рис. 6, а) являются вращающий ротор 2 и неподвижный статор 1, которые набираются из тонких листов электротехнической стали толщиной 0,5 мм. В специально предусмотренных пазах размещаются обмотки 3 статора и 4 ротора. Обмотка статора всегда выполняется трехфазной и может включаться звездой и треугольником (рис. 6, б). Выводы от нее присоединяются к зажимам электродвигателя, к которым с помощью соответствующей пускорегулирующей аппаратуры подается питание от сети. Различают асинхронные электродвигатели с фазным и короткозамкнутым ротором, на валах которых укрепляется крылатка 7 для охлаждения. У первых обмотка ротора выполняется трехфазной и через кольца 5 и щетки 6 присоединяется к пусковым сопротивлениям. В электродвигателях с короткозамкнутым ротором обмотка ротора состоит из медных, латунных или алюминиевых стержней, помещенных в пазах ротора и замкнутых между собой с его торцов кольцами. Эти стержни могут составлять или одинарную, или двойную «беличью» клетку. В первом случае электродвигатель имеет недостаточно удовлетворительную пусковую характеристику. Более приемлемыми являются двухклеточные асинхронные электродвигатели. У них стержни верхней клетки ротора выполняются из материала с большим удельным сопротивлением (латунь, алюминиевая бронза и т. д.), стержни нижней клетки делаются с малым удельным сопротивлением (красная медь). В момент пуска такого электродвигателя (при подаче трехфазного тока в обмотку статора) ток протекает по стержням верхней клетки, имеющей сравнительно небольшое индуктивное сопротивление в момент пуска и значительное активное сопротивление. Это равноценно введению пускового реостата в роторную цепь и приводит к уменьшению пускового тока и увеличению пускового момента. После разгона электродвигателя, когда частота тока в обмотке ротора упадет, ток протекает по стержням нижней клетки, имеющей небольшое активное сопротивление. Аналогично работают электродвигатели с глубоким пазом, обладающие повышенными пусковыми моментами по сравнению с обычными электродвигателями. Так, у электродвигателей с нормальным короткозамкнутым ротором отношение пускового момента к номинальному составляет 0,8—1,3 при значительном пусковом токе (5?7 Iн), электродвигатели же с двойной клеткой или глубоким пазом могут развивать двукратный пусковой момент при меньшем пусковом токе. Это позволяет широко применять их для привода электроталей, кранбалок, лифтов и машин непрерывного транспорта. Обычные же асинхронные электродвигатели с короткозамкнутым ротором из-за трудностей с регулированием скорости применяются в подъемно-транспортных машинах очень редко. Механизмы кранов и других портовых подъемно-транспортных машин приводятся асинхронными электродвигателями с фазным ротором. |
vdvizhke.ru
|
| Kак маркируются выводы концов машин постоянного тока?
Для определения выводных концов отдельных обмоток (последовательной C1, C2; параллельной Ш1, Ш2 и якорной Я1, Я2 с дополнительными полюсами Д1, Д2;обмотка возбуждения независимая М1, М2; Компенсационная обмотка К1, К2) необходимо иметь контрольную лампу или вольтметр и источник переменного тока.
Классификация электродвигателей Электрический двигатель — это электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую, побочным эффектом является выделение тепла. В основу работы любой электрической машины положен принцип электромагнитной индукции. Электрическая машина состоит из статора (неподвижной части) и ротора (якоря в случае машины постоянного тока) (подвижной части), электрическим током (или также постоянными магнитами) в которых создаются неподвижные и/или вращающиеся магнитные поля.    Статор - неподвижная часть электродвигателя, чаще всего - внешняя. В зависимости от типа двигателя, может создавать неподвижное магнитное поле и состоять из постоянных магнитов и/или электромагнитов, либо генерировать вращающееся магнитное поле (и состоять из обмоток, питаемых переменным током). Ротор - подвижная часть электродвигателя, чаще всего располагаемая внутри статора. Может следующее исполнение по конструкции: Статор - неподвижная часть электродвигателя, чаще всего - внешняя. В зависимости от типа двигателя, может создавать неподвижное магнитное поле и состоять из постоянных магнитов и/или электромагнитов, либо генерировать вращающееся магнитное поле (и состоять из обмоток, питаемых переменным током). Ротор - подвижная часть электродвигателя, чаще всего располагаемая внутри статора. Может следующее исполнение по конструкции: Типы электродвигателей Рассматриваем типы двигателей только с точки зрения применения в электротранспорте. Двигатель постоянного тока — электрический двигатель, питание которого осуществляется постоянным током. Имеют следующие разновидности:Из истории Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в пул ртути. Постоянный магнит был установлен в середине пула ртути. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется в школьных классах физики, вместо токсичной ртути используют рассол. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлоу. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности. Изобретатели стремились создать электродвигатель для производственных нужд. Они пытались заставить железный сердечник двигаться в поле электромагнита возвратно-поступательно, т.е. так, как движется поршень в цилиндре паровой машины. Русский ученый Б.С. Якоби пошел иным путем. В 1834 г. он создал первый в мире практически пригодный электродвигатель с вращающимся якорем и опубликовал теоретическую работу "О применении электромагнетизма для приведения в движение машины". Б.С. Якоби писал, что его двигатель несложен и "дает непосредственно круговое движение, которого гораздо легче пробразовать в другие виды движения, чем возратно-поступательное". Вращательное движение якоря в двигателе Якоби происходило вследствие попеременного притяжения и отталкивания электромагнитов. Неподвижаная группа U-образных электромагнитов питалась током непосредственно от гальванической батареи, причем направление тока в этих электромагнитах оставалось неизменным. Подвижная группа электромагнитов была подключена к батарее через комутатор, с помощью которого направление тока в каждом электромагните изменялось раз за один оборот диска. Полярность электромагнитов при этом соответственно изменялась, а каждый из подвижных электромагнитов попеременного притягивался и отталкивался соответствующим неподвижным электромагнитом: вал двигателя начинал вращаться. Мощность такого двигателя составляла всего 15 Вт. Впоследствии Якоби довел мощность электродвигателя до 550 Вт. Этот двигатель был установлен сначала на лодке, а позже на железнодорожной платформе. 13 сентября 1838 г. лодка с 12 пассажирами поплыла по Неве против течения со скоростью около 3 км/ч. Лодка была снабжена колесами с лопастями. Колеса приводились во вращение электрическим двигателем, который получал ток от батареи из 320 гальванических элементов. Так впервые электрический двигатель появился на судне.Двигатель постоянного тока Двигатель постоянного тока — электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию. Простейший двигатель (рис. 1), являющийся машиной постоянного тока, состоит из одного постоянного магнита на статоре, из одного электромагнита с явно выраженными полюсами на роторе (двухполюсного ротора с явно выраженными полюсами и с одной обмоткой из двух частей), щёточноколлекторного узла с двумя пластинами (ламелями) и двумя щётками.
Без учёта короткозамкнутых щётками частей крутящего момента, средний крутящий момент рамок (витков) с током, за один оборот, равен площади под интегральной кривой, крутящего момента, делённой на длину периода (1 оборот = 2пи):
Униполярный двигатель Униполярный электродвигатель — разновидность электрических машин постоянного тока. Содержит проводящий диск, постоянное магнитное поле, параллельное оси вращения диска, 1 токосъёмник на оси диска и 2-ой токосъёмник у края диска.
Универсальный коллекторный двигатель Универсальный коллекторный двигатель (УКД) — разновидность коллекторной машины постоянного тока, которая может работать и на постоянном, и на переменном токе. Получил большое распространение в ручном электроинструменте и в некоторых видах бытовой техники из-за малых размеров, малого веса, лёгкости регулирования оборотов, относительно низкой цены.
Безколлекторный двигатель постоянного тока Ближайшим аналогом УКД по механической харатеристике является бесколлекторный электродвигатель (вентильный электродвигатель, в котором электронным аналогом щёточно-коллекторного узла является инвертор с датчиком положения ротора (ДПР). Электронным аналогом универсального коллекторного двигателя является система: выпрямитель (мост), синхронный электродвигатель с датчиком углового положения ротора (датчик угла) и инвертором (другими словами - вентильный электродвигатель с выпрямителем). Однако из-за применения постоянных магнитов в роторе максимальный момент вентильного двигателя при тех же габаритах будет меньше.Вентильный электродвигатель Вентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Вентильные двигатели (в англоязычной литературе BLDC или PMSM) ещё называют бесколлекторными двигателями постоянного тока, потому что контроллер такого двигателя обычно питается от постоянного напряжения.
Преимущества и недостатки Универсального привода не существует. Все приводные системы имеют свои преимущества и недостатки. С изобретением частотного преобразования появилась, было надежда на универсальность, но реальность развеяла такие надежды. Достоинства ДПТ: простота устройства и управления, практически линейные механическая и регулировочная характеристики двигателя, легко регулировать частоту вращения, хорошие пусковые свойства (большой пусковой момент), возможность использования их как в двигательном, так и в генераторном режимах.Недостатки ДПТ: дороговизна изготовления, необходимость профилактического обслуживания коллекторно-щёточных узлов, ограниченный срок службы из-за износа коллектора. Достоинства вентильного двигателя: высокое быстродействие и динамика, точность позиционирования, широкий диапазон изменения частоты вращения, бесконтактность и отсутствие узлов, требующих техобслуживания — бесколлекторная машина, возможность использования во взрывоопасной и агрессивной среде, большая перегрузочная способность по моменту, высокие энергетические показатели (КПД более 90 % и cos фи более 0,95), большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов, низкий перегрев электродвигателя, при работе в режимах с возможными перегрузками. Недостатки вентильного двигателя:Относительно сложная система управления двигателем, ограниченность ресурса электронных узлов, высокая стоимость двигателя, обусловленная использованием дорогостоящих постоянных магнитов в конструкции ротора, во многих случаях оказывается более рациональным применение асинхронного двигателя с преобразователем частоты. Достоинства универсального двигателя: Прямое включение в сеть, без дополнительных компонентов, (для двигателя постоянного тока требуется, как минимум, выпрямление), меньший пусковой (перегрузочный) ток (и момент), что предпочтительнее для бытовых устройств. проще управляющая схема (при её наличии) - тиристор (или симистор) и реостат. При выходе из строя электронного компонента двигатель (устройство) остаётся работоспособным, но включается сразу на полную мощность, быстроходность и отсутствие привязки к частоте сети, компактность (даже с учётом редуктора), больший пусковой момент, автоматическое пропорциональное снижение оборотов (практически до нуля) и увеличение момента при увеличении нагрузки (при неизменном напряжении питания) - "мягкая" характеристика, возможность плавного регулирования оборотов (момента) в очень широком диапазоне - от ноля до номинального значения - изменением питающего напряжения. Недостатки универсального двигателя: Меньший общий КПД из-за потерь на индуктивность и перемагничивание статора, меньший максимальный момент (может быть недостатком), нестабильность оборотов при изменении нагрузки (где это имеет значение), относительно малая надёжность (срок службы) щеточного узла, сильное искрение на коллекторе из-за коммутации переменного тока и связанные с этим радиопомехи, высокий уровень шума, относительно большое число деталей коллектора (и соответственно двигателя).Важно: 1. Для изучения способов управления двигателями рекомендую изучить статьи в журнале "Компоненты и технологии", 2004 год, начиная с номера 4 "Привод-просто, как "раз,два,три". Журналы можно заказать через сайт. 2. В электронном виде статьи выложены на САЙТЕ: http://www.kit-e.ru/articles/powerel/2004_4_130.php |
|
elektrocar.narod.ru
Электродвигатель постоянного тока был изобретен раньше других типов машин, преобразующих электрическую энергию в механическую. Несмотря на то, что позднее самое широкое распространение получили двигатели переменного тока, существуют сферы применения, в которых нет альтернативы электродвигателям постоянного тока.
Подробно о классификации и принципах работы электрических моторов, рекомендуем прочитать в нашей отдельной статье.
Содержание:

Электродвигатель постоянного и переменного тока
Электродвигатель Якоби.
Для того чтобы понять принцип работы электрических двигателей постоянного тока (ДПТ) мы обратимся к истории его создания. Итак, первые опытные доказательства того, что электрическую энергию можно превращать в механическую, продемонстрировал Майкл Фарадей. В 1821 году он провел опыт с проводником, опущенным в сосуд, наполненный ртутью, на дне которого располагался постоянный магнит. После подачи электричества на проводник, тот начинал вращаться вокруг магнита, демонстрируя свою реакцию на имеющееся в сосуде магнитное поле. Эксперимент Фарадея не нашел практического применения, но доказал возможность создания электрических машин, и дал старт развитию электромеханики.
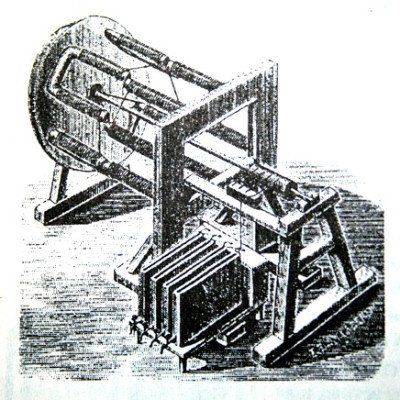
Первый электрический двигатель постоянного тока, в основу которого был положен принцип вращения подвижной части (ротора) был создан русским физиком-механиком Борисом Семеновичем Якоби в 1834 году. Это устройство работало следующим образом:
1-4 — металлические кольца, 5 — скользящий контакт, 6 — батарея
Описанный принцип использовался в двигателе, который Якоби установил на лодке с 12 пассажирами в 1839 году. Судно двигалось рывками со скоростью в 3 км/ч против течения (по другим данным — 4.5 км/ч), но успешно пересекло реку и высадило пассажиров на берег. В качестве источника питания использовалась батарея с 320 гальваническими элементами, а движение осуществлялось с помощью лопастных колес.
Дальнейшее изучение вопроса привело исследователей к разрешению массы вопросов, касаемо того, какие источники питания лучше использовать, как улучшить его рабочие характеристики и оптимизировать габариты.
В 1886 году Фрэнком Джулиан Спрэгом впервые был сконструирован электродвигатель постоянного тока, близкий по конструкции тем, которые применяются в наши дни. В нем был реализован принцип самовозбуждения и принцип обратимости электрической машины. К этому моменту все двигатели данного типа перешли на питание от более подходящего источника – генератора постоянного тока.

Щёточно-коллекторный узел обеспечивает электрическое соединение цепи ротора с цепями, расположенными в неподвижной части машины
В современных ДПТ используется все тот же принцип взаимодействия заряженного проводника с магнитным полем. С усовершенствованием технологий устройство лишь дополняется некоторыми элементами, улучшающими производительность. К примеру, в наши дни постоянные магниты используются лишь в двигателях низкой мощности, поскольку в крупных аппаратах они занимали бы слишком много места.
Первоначальные прототипы двигателей данного типа были заметно проще современных аппаратов. Их примитивное устройство включало в себя лишь статор из двух магнитов и якорь с обмотками, на которые подавался ток. Изучив принцип взаимодействия магнитных полей, конструкторы определили следующий алгоритм работы двигателя:
Данный алгоритм отлично работал в теории, однако на практике перед создателями первых двигателей вставали характерные проблемы, препятствовавшие функционированию машины:
Решение первой проблемы было найдено довольно быстро – для этого было предложено использовать более двух магнитов. Позднее в устройство двигателя стали включать несколько обмоток и коллекторно-щеточный узел, который подавал питание только на одну пару обмоток в определенный момент времени.
Коллекторно-щеточная система подачи тока решает и проблему торможения ротора – переключение полярности происходит до того момента, когда вращение ротора начинает замедляться. Это значит, что во время одного оборота двигателя происходит как минимум два переключения полярности.
Проблема слабых пусковых токов рассматривается ниже в отдельном разделе.
Итак, постоянный магнит закрепляется на корпусе двигателя, образуя вместе с ним статор, внутри которого располагается ротор. После подачи питания на обмотке якоря возникает электромагнитное поле, вступающее во взаимодействие с магнитным полем статора, это приводит к вращению ротора, жестко посаженного на вал. Для передачи электрического тока от источника к якорю двигатель оснащается коллекторно-щеточным узлом, состоящим из:
Обмотки якоря одними концами соединяются между собой, а другими – с секциями коллектора, образуя таким образом цепь, по которой ток идет по следующему маршруту: входная щетка –> обмотка ротора -> выходная щетка.
Приведенная принципиальная схема (рис. 3) демонстрирует принцип работы примитивного электродвигателя постоянного тока с коллектором из двух секций:

Детали электродвигателя постоянного тока
Здесь, как уже было отмечено, продемонстрирован принцип работы примитивного прототипа. В настоящих двигателях используется более двух магнитов, а коллектор состоит из большего числа контактных площадок, благодаря чему обеспечивается плавное вращение.
В высокомощных двигателях использование постоянных магнитов не представляется возможным из-за их большого размера. Альтернативой для них служит система из нескольких токопроводящих стержней, на каждой из которых имеется своя обмотка, подключаемая к питающим шинам. Одноименные полюса включаются в сеть последовательно. На корпусе может присутствовать от 1 до 4 пар полюсов, а их количеству должно соответствовать число токосъемных щеток на коллекторе.
Электродвигатели, рассчитанные на большую мощность, обладают рядом функциональных преимуществ перед более «легкими» аналогами. К примеру, здешнее устройство токосъемных щеток поворачивает их на определенный угол относительно вала для компенсации торможения вала, названного «реакцией якоря».
Постепенное оснащение ротора двигателя дополнительными элементами, обеспечивающими его бесперебойную работу и исключающими секторальное торможение, возникает проблема его запуска. Но все это увеличивает вес ротора – с учетом сопротивления вала столкнуть его с места становится сложнее. Первым решением этой проблемы, приходящим в голову, может быть увеличение силы тока, подаваемой на старте, но это может привести к неприятным последствиям:
Поэтому такое решение можно назвать скорее рискованной полумерой.
Вообще, данная проблема является главным недостатком электродвигателей постоянного тока, но включает в себя основное их преимущество, благодаря которому они незаменимы в некоторых областях. Преимущество это заключается в прямой передаче момента вращения сразу же после пуска – вал (если тронется с места) будет крутиться с любой нагрузкой. Двигатели переменного тока на такое не способны.
Решить эту проблему полностью до сих пор не удалось. На сегодняшний день для пуска таких двигателей используется автомат-стартер, чей принцип работы схож с автомобильной коробкой передач:
Данный цикл повторяется 3-5 раз (рис. 4) и решает необходимость старта двигателя без возникновения критических нагрузок в сети. Фактически, «плавный» запуск по-прежнему отсутствует, однако оборудование работает безопасно, а главное достоинство электродвигателя постоянного тока – крутящий момент – сохраняется.
Подключение ДПТ выполняется несколько сложнее, в сравнении с двигателями со спецификацией на переменный ток.
У двигателей высокой и средней мощности, как правило, есть специальные контакты обмотки возбуждения (ОВ) и якоря, вынесенные в клеммную коробку. Чаще всего на якорь подают выходное напряжение источника, а на ОВ – ток, отрегулированный, как правило, реостатом. Скорость вращения двигателя напрямую зависит от силы тока, поданного на обмотку возбуждения.
Есть три основные схемы включения якоря и обмотки возбуждения электродвигателей постоянного тока:
В современных электрических двигателях постоянного тока могут применяться смешанные схемы, основанные на базе трех описанных.
Способ регулирования оборотов ДПТ зависит от схемы его подключения:
Данные схемы редко применяются в современном высокотехнологичном оборудовании, поскольку обладают узким диапазоном регулировки и другими недостатками. В наши дни для этих целей все чаще создают электронные схемы управления.
Для того чтобы реверсировать (обратить) вращение двигателя постоянного тока необходимо:
Как вы уже поняли, использование электродвигателей постоянного тока целесообразно в условиях, когда постоянное беспрерывное подключение к сети неосуществимо. Хорошим примером здесь может служить автомобильный стартер, толкающий двигатель внутреннего сгорания «с места», или детские игрушки с моторчиком. В данных случаях для запуска двигателя используются аккумуляторные батареи. В промышленных целях ДПТ применяются на прокатных станах.
Основная же сфера применения ДПТ – электрический транспорт. Пароходы, электровозы, трамваи, троллейбусы и другие аналогичные имеют очень большое пусковое сопротивление, преодоление которого возможно только с помощью двигателей постоянного тока с их мягкими характеристиками и широкими пределами регулировки вращения. С учетом стремительного развития и популяризации экологических транспортных технологий, сфера применения ДПТ лишь увеличивается.

Самый простой щёточно-коллекторный узел
Резюмируя все вышесказанное, можно описать характерные для электродвигателей постоянного тока достоинства и недостатки относительно их аналогов, рассчитанных на работу от переменного тока.
Основные достоинства:
Главные недостатки:
Электродвигатели постоянного тока, безусловно, проигрывают своим «переменным» сородичам по стоимости и надежности, однако используются и будут использоваться, поскольку плюсы от их использования в определенных сферах категорические перечеркивают все минусы.
Это может быть интересно:tokidet.ru









 где n - число щёток, d - угловая ширина одной щётки [радиан].
где n - число щёток, d - угловая ширина одной щётки [радиан]. 

 Ротор с тремя полюсами (условно полторы пары), имеет наименьшее число полюсов ротора, при которых самозапуск возможен из любого положения ротора. На самом деле, один полюс всё время находится в зоне коммутации, т.е. ротор имеет неявные две пары полюсов. Ротор любого ДПТ состоит из многих катушек, на часть которых подаётся питание, в зависимости от угла поворота ротора, относительно статора. Применение большого числа (несколько десятков) катушек, необходимо для уменьшения неравномерности крутящего момента, для уменьшения коммутируемого (переключаемого) тока, и для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть для создания максимального момента на роторе).
Ротор с тремя полюсами (условно полторы пары), имеет наименьшее число полюсов ротора, при которых самозапуск возможен из любого положения ротора. На самом деле, один полюс всё время находится в зоне коммутации, т.е. ротор имеет неявные две пары полюсов. Ротор любого ДПТ состоит из многих катушек, на часть которых подаётся питание, в зависимости от угла поворота ротора, относительно статора. Применение большого числа (несколько десятков) катушек, необходимо для уменьшения неравномерности крутящего момента, для уменьшения коммутируемого (переключаемого) тока, и для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть для создания максимального момента на роторе).  Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый). Щётки с большой частотой размыкают и замыкают пластины-контакты коллектора ротора. Как следствие, при работе ДПТ происходят переходные процессы, в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает надёжность ДПТ. Для уменьшения искрения применяются различные способы, основным из которых является установка добавочных полюсов. При больших токах, в роторе ДПТ возникают мощные переходные процессы, в результате чего, искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим. При проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.
Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый). Щётки с большой частотой размыкают и замыкают пластины-контакты коллектора ротора. Как следствие, при работе ДПТ происходят переходные процессы, в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает надёжность ДПТ. Для уменьшения искрения применяются различные способы, основным из которых является установка добавочных полюсов. При больших токах, в роторе ДПТ возникают мощные переходные процессы, в результате чего, искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим. При проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.  Наглядная демонстрация работы униполярного электродвигателя. На головке шурупа находится постоянный магнит, сила которого удерживает шуруп притянутым к полюсу батарейки Первый униполярный двигатель, колесо Барлоу, создал Питер Барлоу, описав его в книге «Исследование магнитных притяжений», опубликованной в 1824 году. Колесо Барлоу представляло из себя два медных зубчатых колеса, находящихся на одной оси. В результате взаимодействия тока, проходящего через колёса с магнитным полем постоянных магнитов колёса вращаются. Барлоу выяснил, что при перемене контактов или положения магнитных полюсов происходит смена направления вращения колёс на противоположное
Наглядная демонстрация работы униполярного электродвигателя. На головке шурупа находится постоянный магнит, сила которого удерживает шуруп притянутым к полюсу батарейки Первый униполярный двигатель, колесо Барлоу, создал Питер Барлоу, описав его в книге «Исследование магнитных притяжений», опубликованной в 1824 году. Колесо Барлоу представляло из себя два медных зубчатых колеса, находящихся на одной оси. В результате взаимодействия тока, проходящего через колёса с магнитным полем постоянных магнитов колёса вращаются. Барлоу выяснил, что при перемене контактов или положения магнитных полюсов происходит смена направления вращения колёс на противоположное