Машины переменного тока подразделяются на синхронные и асинхронные. Асинхронные машины используются в основном, как двигатели. В режиме торможения они работают как генераторы. Синхронные машины переменного тока получили наибольшее распространение как трехфазные генераторы, в основном это все генераторы на современных электрических станциях. Трехфазные синхронные двигатели преимущественно применяются в качестве привода мощных производственных машин.
Асинхронная машина– такая машина, в которой преобразование энергии осуществляется посредством вращающегося магнитного поля, возбуждаемого переменным током частотойf1, поступающим из сети. Основным принципом работы является то, что ротор вращается со скоростьюn2отличающейся от скорости вращения магнитного поляn1, называемой синхронной скоростью двигателя. В большинстве асинхронных двигателей магнитное поле создается системой трехфазного тока. При работе в качестве двигателя ротор вращается медленнее, чем магнитное поле. Если ротор с помощью первичного двигателя вращается быстрее, чем магнитное поле, то машина является генератором. Как в режиме двигателя, так и режиме генератора скорость вращения ротора асинхронной машины зависит от нагрузки.
Неподвижная часть машины – статор, состоит из стального сердечника и расположенных на нем трех обмоток, оси которых сдвинуты на угол 120°одна относительно другой. Обмотки подключены к источнику трехфазного тока. Сердечник статора имеет форму полого цилиндра, вдоль внутренней поверхности которого, сделаны пазы. В диаметрально противоположных пазах статора уложены обмотки трех катушек. Если катушки статора соединить между собой в звезду или треугольник, то симметричная трехфазная цепь питания создает в магнитной системе машины вращающееся магнитное поле.
Ротор, представляет собой цилиндрический сердечник, в диаметрально противоположных пазах которого, уложены короткозамкнутые витки. При вращении магнитного поля токов статора со скоростьюn1, в проводниках ротора наводится ЭДС. Под действием ЭДС в короткозамкнутых витках ротора протекает ток, взаимодействующий с вращающимся магнитным полем. Это взаимодействие проявляется в возникновении электромагнитных сил, действующих на ротор. Если электромагнитные силы, действующие на неподвижный ротор, превышают тормозной момент на его валу, то он получает ускоренное движение в направлении вращения магнитного поля. По мере возрастания скорости вращения ротора относительная скорость движения его проводников в равномерно вращающемся поле уменьшается, вследствие чего уменьшается и величина тока в них. Процесс изменения тока и скорости вращения ротора прекратится, как только наступит устойчивое равновесие между моментом электромагнитных сил, вызывающих вращение ротора, и тормозным моментом, создаваемым устройством, приводимым в движение электрической машиной. В этих условиях ротор машины будет вращаться с постоянной скоростью, отличной от скорости вращения поля.
Таким образом, принцип работы асинхронных двигателей основан на взаимодействии вращающегося магнитного поля с токами, которые наводятся этим полем в проводниках ротора.
Одной из важнейших величин, характеризующих работу асинхронного двигателя, является скольжение ротора, под которым понимают отношение:
где:
 – частота вращения ротора;
– частота вращения ротора;
 – частота вращения магнитного поля;
– частота вращения магнитного поля;
 – число пар полюсов двигателя.
– число пар полюсов двигателя.
Для большинства современных типов асинхронных двигателей скольжение ротора при номинальной нагрузке заключено в пределах 2 – 6%.
При отсутствии нагрузки, когда двигатель работает вхолостую, и вращению ротора препятствуют лишь незначительные силы трения, скольжение очень мало и не превосходит десятых долей процента. С увеличением нагрузки скорость вращения ротора уменьшается, а скольжение и вращательный момент соответственно увеличиваются.
Электромагнитные процессы в асинхронном двигателе аналогичны процессам, происходящим в трансформаторе. Обмотку статора двигателя можно рассматривать как первичную обмотку трансформатора, а обмотку ротора - как вторичную. Особенностью двигателя по сравнению с трансформатором является то, что в его статорной и роторной обмотках действуют ЭДС и токи разных частот.
Величины этих ЭДС определяются по формулам:
 ;
;
 ,
,
где:
 – ЭДС обмотки статора,
– ЭДС обмотки статора,
 – ЭДС обмотки неподвижного ротора,
– ЭДС обмотки неподвижного ротора,
 и
и – соответственно обмоточные коэффициенты обмоток статора и ротора,
– соответственно обмоточные коэффициенты обмоток статора и ротора,
 и
и – число обмоток статора и ротора,
– число обмоток статора и ротора,
 – основной магнитный поток,
– основной магнитный поток,
 – частота тока цепи обмоток статора,
– частота тока цепи обмоток статора,
 – частота ЭДС ротора. Из этого соотношения следует, что частота ЭДС ротора пропорциональна скольжению.
– частота ЭДС ротора. Из этого соотношения следует, что частота ЭДС ротора пропорциональна скольжению.
При неподвижном роторе  , т.е частота тока и ЭДС ротора равна частоте ЭДС и тока статора и равна частоте питающего напряжения. Векторная диаграмма в этом режиме, называемым холостым ходом, аналогична соответствующей векторной диаграмме трансформатора.
, т.е частота тока и ЭДС ротора равна частоте ЭДС и тока статора и равна частоте питающего напряжения. Векторная диаграмма в этом режиме, называемым холостым ходом, аналогична соответствующей векторной диаграмме трансформатора.
ЭДС во вращающемся роторе 
Индуктивное сопротивление вращающегося ротора:

Активное сопротивление ротора  не зависит от частоты.
не зависит от частоты.
По закону Ома ток в роторе равен:
Электрическая мощность, подведенная к двигателю из сети  , преобразуется в нем в механическую. Преобразование энергии сопровождается потерями. Часть подводимой мощности тратится на потери в стали машины –
, преобразуется в нем в механическую. Преобразование энергии сопровождается потерями. Часть подводимой мощности тратится на потери в стали машины – и на нагрев обмотки статора
и на нагрев обмотки статора . Остальная мощность электромагнитным путем передается на ротор и называется электромагнитной мощностью
. Остальная мощность электромагнитным путем передается на ротор и называется электромагнитной мощностью . Часть мощности, переданной на ротор, тратится на нагрев меди обмоток ротора
. Часть мощности, переданной на ротор, тратится на нагрев меди обмоток ротора и зависит от скольжения
и зависит от скольжения . Остальная часть мощности называется полной механической мощностью
. Остальная часть мощности называется полной механической мощностью  . Если из полной механической мощности вычесть механические потери
. Если из полной механической мощности вычесть механические потери  и добавочные потери
и добавочные потери  то получится полезная мощность на валу двигателя
то получится полезная мощность на валу двигателя .
.
КПД асинхронного двигателя:
 ,
,
где  .
.
Величина КПД асинхронных двигателей составляет от 0,7 до 0,9 и выше.
Механическая мощность ротора:
 ,
,
где  – вращающий момент двигателя.
– вращающий момент двигателя.
Электромагнитная мощность вращающегося магнитного поля:
Основные режимы работы асинхронного двигателя:
пуск двигателя в ход,
холостой ход двигателя,
рабочий режим двигателя.
Рабочий режим двигателя при номинальной нагрузке характеризуется номинальными параметрами различными для каждого асинхронного двигателя. Основным номинальным параметром асинхронного двигателя является его номинальная мощность  . Это мощность выражается в киловаттах и соответствует той наибольшей механической мощности на валу двигателя, которая может быть полезно отдана механизму, приводимого двигателем во вращение. Работа двигателя с нагрузкой превышающей его номинальную мощность, рассматривается как перегрузка и потому длительно не допустима.
. Это мощность выражается в киловаттах и соответствует той наибольшей механической мощности на валу двигателя, которая может быть полезно отдана механизму, приводимого двигателем во вращение. Работа двигателя с нагрузкой превышающей его номинальную мощность, рассматривается как перегрузка и потому длительно не допустима.
Вторым параметром двигателя является его номинальная скорость вращения  .
.
Важным электрическим параметром является напряжение, для которого предназначен двигатель  . Номинальный ток двигателя устанавливается, исходя из номинальной мощности двигателя и номинального напряжения. К номинальным параметрам относят также номинальный коэффициент мощности двигателя.
. Номинальный ток двигателя устанавливается, исходя из номинальной мощности двигателя и номинального напряжения. К номинальным параметрам относят также номинальный коэффициент мощности двигателя.
Номинальный момент  часто вычисляют по упрощенной формуле, учитывая номинальные значения величин:
часто вычисляют по упрощенной формуле, учитывая номинальные значения величин:
 (кГм.) или
(кГм.) или (Н·м.)
(Н·м.)
Для расчета зависимости вращающего момента асинхронного двигателя от скольжения с достаточной точностью применяется упрощенная формула:
 ,
,
где:  – максимальный вращающий момент,
– максимальный вращающий момент,
 – критическое скольжение, при котором вращающий момент достигает своего максимального значения, его величина зависит от активного сопротивления цепи ротора. При известном номинальном скольжении критическое определяется по формуле:
– критическое скольжение, при котором вращающий момент достигает своего максимального значения, его величина зависит от активного сопротивления цепи ротора. При известном номинальном скольжении критическое определяется по формуле:
Зависимость вращающего момента от его скольжения или, от скорости вращения ротора называют механической характеристикой двигателя.  , при
, при ,
, .
.
Для оценки рабочих свойств двигателя пользуются его рабочими характеристиками. Рабочими характеристиками асинхронного двигателя называют кривые, характеризующие зависимость электромагнитного момента  , тока статора
, тока статора , КПД
, КПД , и коэффициента мощности на валу
, и коэффициента мощности на валу от полезной мощности
от полезной мощности на валу при неизменном напряжении и частоте питающего напряжения
на валу при неизменном напряжении и частоте питающего напряжения ,
, .
.
В зависимости от конструктивного выполнения роторной обмотки трехфазные асинхронные двигатели разделяются на два типа:
При пуске двигателя с короткозамкнутым ротором скорость вращения ротора в первый момент  , чему соответствует максимальное скольжение
, чему соответствует максимальное скольжение , двигатель находится в режиме короткого замыкания. Ток в роторе имеет наибольшее значение и наибольший сдвиг фаз по отношению к ЭДС. При этом пусковой ток статора в 4 – 10 раз больше номинального. Пусковой момент составляет 0,9 – 1,8 от номинального момента. По мере разгона двигателя величина пускового тока быстро уменьшается. Большая величина пускового тока вызывает резкие колебания напряжения в сети, что плохо отражается на работе других потребителей. При включении двигателей в мощные энергосистемы эти колебания нивелируются, поэтому используется прямой пуск - включением обмотки статора на полное напряжение цепи. Для уменьшения пускового тока асинхронных двигателей с короткозамкнутым ротором применяют способы, позволяющие понизить на время пуска напряжение, подводимое к статору: переключение обмотки статора со звезды на треугольник, запуск двигателя через автотрансформатор, включение дополнительного сопротивления в обмотку статора. При запуске двигателя через автотрансформатор уменьшение пускового тока в цепи произойдет в
, двигатель находится в режиме короткого замыкания. Ток в роторе имеет наибольшее значение и наибольший сдвиг фаз по отношению к ЭДС. При этом пусковой ток статора в 4 – 10 раз больше номинального. Пусковой момент составляет 0,9 – 1,8 от номинального момента. По мере разгона двигателя величина пускового тока быстро уменьшается. Большая величина пускового тока вызывает резкие колебания напряжения в сети, что плохо отражается на работе других потребителей. При включении двигателей в мощные энергосистемы эти колебания нивелируются, поэтому используется прямой пуск - включением обмотки статора на полное напряжение цепи. Для уменьшения пускового тока асинхронных двигателей с короткозамкнутым ротором применяют способы, позволяющие понизить на время пуска напряжение, подводимое к статору: переключение обмотки статора со звезды на треугольник, запуск двигателя через автотрансформатор, включение дополнительного сопротивления в обмотку статора. При запуске двигателя через автотрансформатор уменьшение пускового тока в цепи произойдет в раз, где
раз, где - коэффициент трансформации автотрансформатора. Однако недостатком этих способов является уменьшение пускового момента, величина которого пропорциональна квадрату напряжения сети:
- коэффициент трансформации автотрансформатора. Однако недостатком этих способов является уменьшение пускового момента, величина которого пропорциональна квадрату напряжения сети: .
.
Асинхронный двигатель с фазным ротором пускается в ход с помощью пускового реостата, включенного последовательно с обмоткой ротора.
Пусковые качества двигателей характеризуются коэффициентами кратности пускового тока  и пускового момента
и пускового момента .
.
Частота вращения двигателя регулируется изменением частоты вращения магнитного поля (частоты питающего напряжения), переключением пар полюсов, изменением активного сопротивление фазного ротора с помощью трехфазного реостата, включаемого так же как пусковой.
В синхронном двигателе частота вращения двигателя равна частоте вращения магнитного поля: .
.
Основными характеристиками синхронного двигателя являются угловая, механическая и регулировочная. Угловая характеристика определяет зависимость вращающего момента от угла между ЭДС и напряжением:

где:
 – угол между векторами ЭДС и напряжения, т.е.
– угол между векторами ЭДС и напряжения, т.е. ,
,
 – полное индуктивное сопротивление двигателя.
– полное индуктивное сопротивление двигателя.
На специальных электростанциях, покрывающих пиковые нагрузки в энергосистемах, синхронная машина работает генератором в часы максимума нагрузки и двигателем – в остальное время, перекачивая с помощью гидротурбины, которая теперь становится насосом, воду в водохранилище, создавая необходимый запас её для последующей работы. Такие агрегаты называют обратимыми.
Синхронная машина состоит из двух частей: неподвижной части – статора и вращающейся части – ротора и имеет две обмотки. Одна обмотка подключается к источнику постоянного тока и создает основное магнитное поле машины. Это обмотка возбуждения. Другая обмотка является обмоткой якоря и состоит из одной, двух или трех фаз. В обмотке якоря индуцируется основная ЭДС машины. В синхронных машинах наибольшее распространение получила конструкция, когда обмотка якоря располагается на статоре, а обмотка возбуждения – на роторе.
Особенностью синхронных машин является то, что ротор должен быть раскручен к моменту присоединения машины к сети переменного тока. При этом должны выполнятся следующие условия: переменный ток, протекающий через обмотку статора, должен быть таким, чтобы его взаимодействие с магнитным полем постоянного тока создавало силу требуемого направления, иначе, вместо того чтобы поддерживать вращение, электромагнитное взаимодействие будет ему препятствовать.
Синхронные машины должны вращаться со строго определенной скоростью. Уменьшение скорости хотя бы на 1% приводит к тому, что изменения тока в обмотке переменного тока перестают соответствовать изменениям в положении обмотки постоянного тока, они как бы выпадают из такта, машина выпадает из синхронизма: обмотка постоянного тока подвергается усилиям, направленным то в одну, то в другую сторону, и машина останавливается.
Постоянный ток, создающий магнитное поле в синхронной машине, называют током возбуждения. Чем больше ток возбуждения, тем больше напряжение, наводимое в машине.
Пример.Определить мощность, подводимую к трехфазному асинхронному двигателю с фазным ротором, а также ток в обмотках статора при их соединении звездой и треугольником. Номинальные параметры двигателя: полезная мощность на валу кВт, напряжение на статоре
кВт, напряжение на статоре В,
В, %,
%, 0,85.
0,85.
Решение.Активная мощность, потребляемая двигателем, равна:
 кВт.
кВт.
полная мощность:
 кВ·А.
кВ·А.
При соединении обмоток звездой:
 А,
А,
при соединении треугольником:
 А.
А.
Пример.Для привода лифта использован трехфазный асинхронный электродвигатель с короткозамкнутым ротором, питающийся от трехфазной сети с частотой напряжения Гц (рис.6.15), с числом пар полюсов
Гц (рис.6.15), с числом пар полюсов и частотой вращения ротора
и частотой вращения ротора . Определить частоту вращения
. Определить частоту вращения и
и вращающегося магнитного поля, скольжение
вращающегося магнитного поля, скольжение ротора, частоту
ротора, частоту тока в роторе при пуске и в рабочем режиме
тока в роторе при пуске и в рабочем режиме , а также частоту вращения ротора
, а также частоту вращения ротора , частоту тока
, частоту тока в роторе при возрастании нагрузки на валу двигателя, с учетом того, что частота вращения ротора
в роторе при возрастании нагрузки на валу двигателя, с учетом того, что частота вращения ротора при этом уменьшилась на 5% и составляет
при этом уменьшилась на 5% и составляет .
.
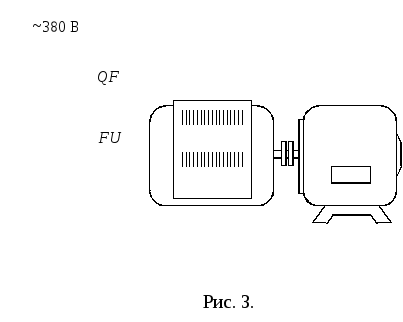
Рис.6.15. Трехфазный асинхронный электродвигатель с короткозамкнутым ротором, питающийся от трехфазной сети.
Решение.Частота вращения магнитного поля (синхронная частота вращения) при числе пар полюсов :
:
 об/мин.
об/мин.
Угловая частота вращения магнитного поля:
 рад/с.
рад/с.
Скольжение ротора двигателя:
 .
.
Частота вращения ротора двигателя:
 об/мин,
об/мин,  .
.
Частота тока в роторе двигателя при пуске  :
:
 Гц.
Гц.
Частота тока ротора при частоте вращения двигателя:
 Гц.
Гц.
Частота вращения ротора при возросшей нагрузке на валу двигателя:
 об/мин.
об/мин.
Скольжение ротора при возросшей нагрузке:
 .
.
Частота тока ротора при возросшей нагрузке:
 Гц.
Гц.
Пример.Для пуска восьмиполюсного асинхронного двигателя с фазным ротором и номинальными параметрами: об/мин;
об/мин; и
и Ом используется пусковой реостат. Определить сопротивление
Ом используется пусковой реостат. Определить сопротивление фазы пускового реостата, чтобы при пуске двигатель развивал максимальный момент, если частота напряжения сети
фазы пускового реостата, чтобы при пуске двигатель развивал максимальный момент, если частота напряжения сети Гц.
Гц.
Решение.Номинальное скольжение определяется по формулам:
 ,
, ,
,
согласно которым
 об/мин
об/мин
и  .
.
Критическое скольжение равно:
 .
.
Пусковое сопротивление определяется из соотношения:
 ,
,
отсюда:
 Ом.
Ом.
Пример.Асинхронный двигатель с короткозамкнутым ротором имеет следующие паспортные данные: В,
В, кВт,
кВт, об/мин,
об/мин, %,
%, . Кратность пускового тока
. Кратность пускового тока , частота напряжения питания
, частота напряжения питания Гц. Определить число пар полюсов, номинальный и пусковой токи двигателя при соединении обмоток статора в треугольник и звезду.
Гц. Определить число пар полюсов, номинальный и пусковой токи двигателя при соединении обмоток статора в треугольник и звезду.
Решение.Ближайшая стандартная синхронная частота об/мин, следовательно, число пар полюсов
об/мин, следовательно, число пар полюсов , т.е. машина шестиполюсная.
, т.е. машина шестиполюсная.
Скольжение равно:
 ,
,
мощность, потребления двигателя:
 кВт,
кВт,
номинальный момент:
 Н·м.
Н·м.
При соединении обмоток треугольником номинальный ток:
 А,
А,
пусковой ток:
 А.
А.
При соединении обмоток звездой:
 А,
А,
пусковой ток:
 А,
А,
т.е. пусковой ток в этом случае в  раз меньше.
раз меньше.
Пример.Синхронный шестиполюсный двигатель имеет следующие номинальные данные: кВт,
кВт, об/мин,
об/мин, В,
В, А,
А, Ом. Определить номинальный и максимальный моменты двигателя, если ЭДС двигателя равна 670 В. Построить угловую характеристику двигателя.
Ом. Определить номинальный и максимальный моменты двигателя, если ЭДС двигателя равна 670 В. Построить угловую характеристику двигателя.
Решение.Номинальный момент определяется по формуле:
 .
.
Максимальный момент при  равен:
равен:
 .
.
Подставляя исходные данные, получаем:
 .
.
Исходная зависимость для угловой характеристики имеет вид  . Например, при номинальном моменте
. Например, при номинальном моменте и
и .
.
studfiles.net
Асинхронная машина – это бесколлекторная машина переменного тока, у которой при работе возбуждается вращающееся магнитное поле, но ротор вращается асинхронно, т.е. с угловой скоростью, отличной от угловой скорости поля.
Асинхронные двигатели являются самыми распространенными из всех двигателей. Их преимущества состоят в простоте устройства, большой надежности и сравнительно низкой стоимости.
Широко применяются трехфазные асинхронные двигатели, предложенные М.О. Доливо-Добровольским в 1888 г. Они выполняются мощностью от долей ватта до тысяч киловатт, с частотой вращения от 500 до 3000 об/мин и напряжением до 10 кВ. Однофазные асинхронные двигатели используют для привода бытовых приборов, электроинструмента, в схемах автоматики. Они питаются от однофазной цепи и имеют мощность, как правило, не выше 0,5 кВт.
Асинхронные машины могут работать в режиме генератора. Но как источники электрической энергии они почти не применяются, так как не имеют собственного источника возбуждения магнитного потока и по своим показателям уступают синхронным генераторам.
Асинхронные машины применяют в качестве регуляторов напряжения, фазорегуляторов, преобразователей частоты и др.
Недостатками асинхронных машин являются сложность и неэкономичность регулирования их эксплуатационных характеристик.
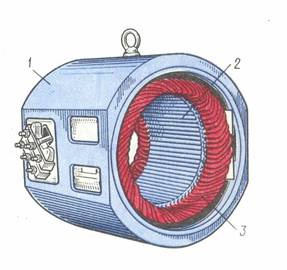
Асинхронный двигатель состоит из статора, ротора и подшипниковых щитов (рис. 11.1). Статор – неподвижная часть двигателя – имеет цилиндрическую форму. Он состоит из корпуса 1, сердечника 2 и обмотки 3. Корпус литой стальной или чугунный. Магнитопровод статора собирается из тонких листов электротехнической стали. На внутренней поверхности он имеет пазы, в которые укладывается обмотка статора. Ротор асинхронного двигателя – вращающаяся часть – состоит из стального вала 4, магнитопровода 5, набранного из листов электротехнической стали с выштампованными пазами. Обмотка ротора бывает короткозамкнутой или фазной. Короткозамкнутая обмотка выполняется из алюминиевых или медных стержней, замкнутых с обоих торцов ротора накоротко. Фазный ротор имеет трехфазную обмотку, соединенную в звезду. Выводы обмотки подсоединены к кольцам на валу и с помощью щеток подсоединяются к реостату или другому устройству. Вращающийся ротор размещают на общем валу cо статором. Вал вращается в подшипниковых щитах. Соединение обмотки статора осуществляется в коробке, в которую выведены начала фаз С1,С2,С3и концы фазС4,С5,С6. На рис. 11.2 показаны схемы расположения этих выводов (рис. 11.2 а) и способы соединения их между собой при соединении фазных обмоток звездой (рис. 11.2 б) и треугольником (рис. 11.2 в).
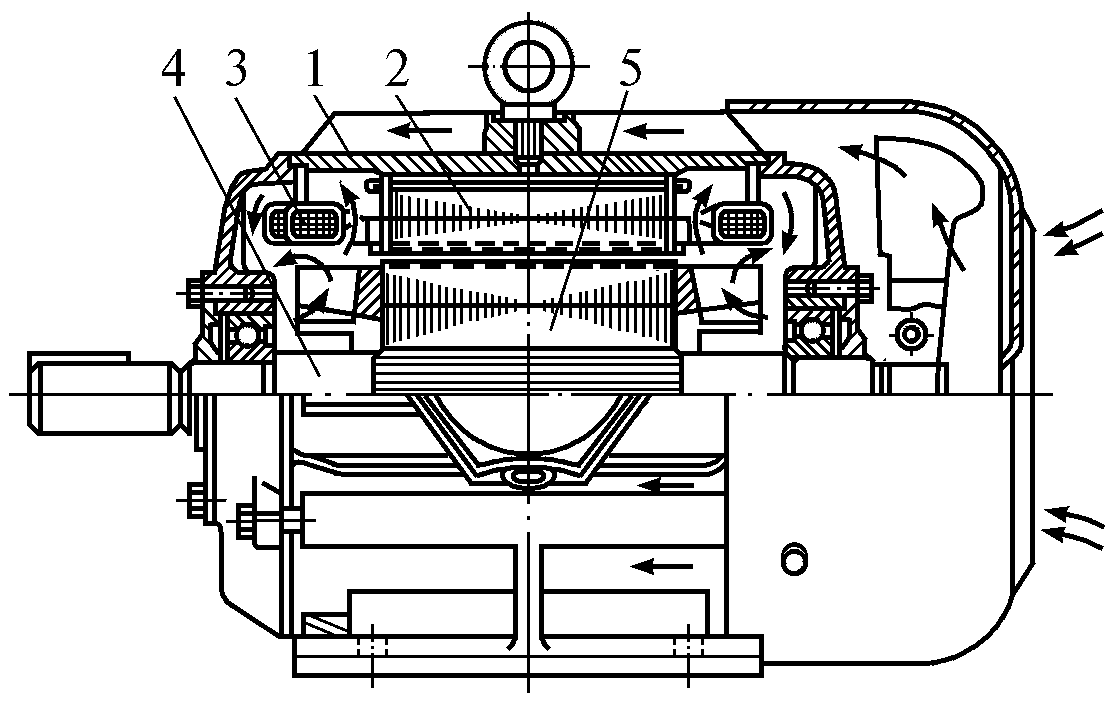
Рис. 11.1
Если в паспорте двигателя указаны два напряжения, например, 380/220, то большему напряжению соответствует соединение звездой, более меньшему – треугольником. В обоих случаях напряжение на фазе двигателя равно 220 В. 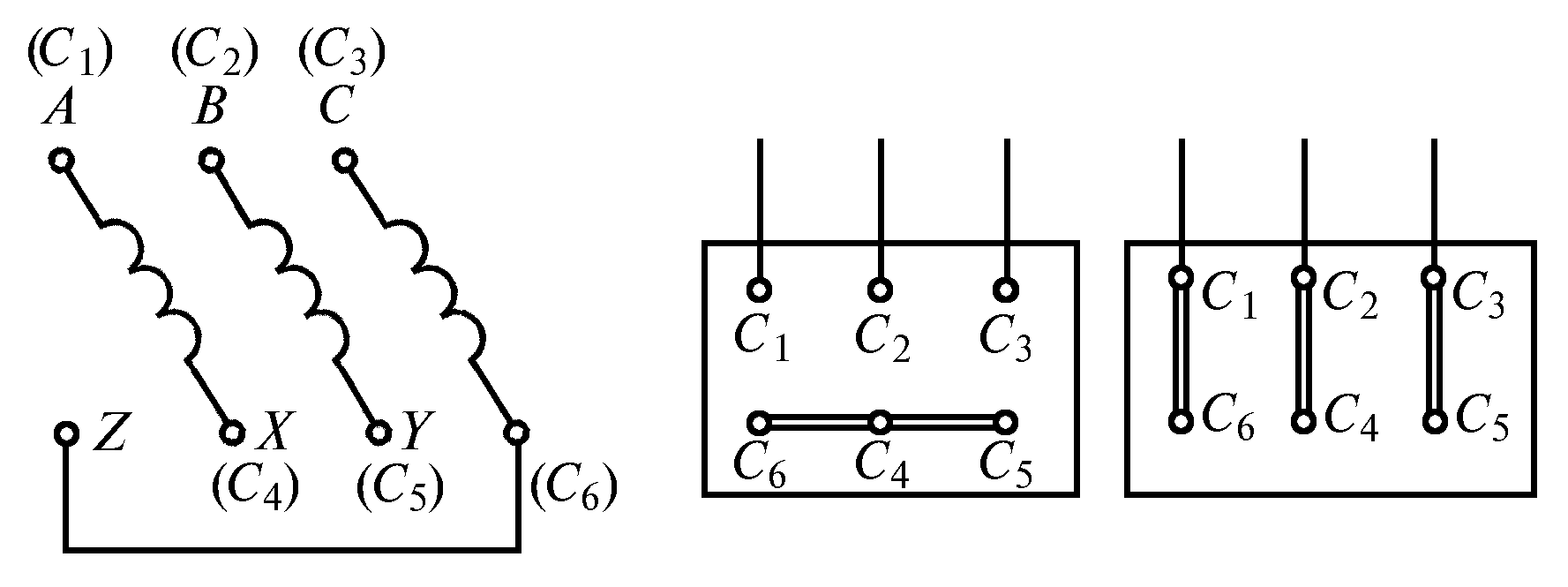
а) б) в)
Рис. 11.2
studfiles.net
Электрические машины переменного тока. Назначение, область применение, устройство принцип действие машин.
Машины переменного тока бывают двух видов. Это синхронные машины и асинхронные. У синхронных машин скорость вращения ротора строго зависит от частоты переменного тока. Можно сказать скорость вращения "синхронна" с частотой тока. Не трудно догадаться, что у асинхронных машин частота вращения в общем случае зависит от нагрузки на валу, а не от частоты питающего тока. Кроме деления на синхронные и асинхронные электрические машины еще делятся по назначению. Это могут быть генераторы. То есть такая машина, которая преобразует механическую энергию вращения в переменный электрический ток. Машина, которая преобразует электрическую энергию в механическую называется двигателем. Также существует еще один класс электрических машин. Они преобразуют электрическую энергию, тоже в электрическую, но другой частоты или напряжения. Синхронной машиной переменного тока называют такую машину, в которой: основное магнитное поле то есть поле статора создается постоянным током. В частном случае это может быть даже постоянный магнит. А вращение ротора происходит с частотой изменения тока.
Формула 1 — зависимость частоты вращения ротора синхронной машины от частоты переменного тока. где n это частота, с которой вращается ротор, измеряется в оборотах в минуту. То есть, сколько полных оборотов совершит ротор за одну минуту. f частота питающего переменного тока p количество пар полюсов у магнитной системы машины
В настоящее время асинхронные машины используются в основном в режиме двигателя. Машины мощностью больше 0.5 кВт обычно выполняются трёхфазными, а при меньшей мощности – однофазными.
Впервые конструкция трёхфазного асинхронного двигателя была разработана, создана и опробована нашим русским инженером М. О. Доливо-Добровольским в 1889-91 годах. Демонстрация первых двигателей состоялась на Международной электротехнической выставке во Франкфурте на Майне в сентябре 1891 года. На выставке было представлено три трёхфазных двигателя разной мощности. Самый мощный из них имел мощность 1.5 кВт и использовался для приведения во вращение генератора постоянного тока. Конструкция асинхронного двигателя, предложенная Доливо-Добровольским, оказалась очень удачной и является основным видом конструкции этих двигателей до настоящего времени.
За прошедшие годы асинхронные двигатели нашли очень широкое применение в различных отраслях промышленности и сельского хозяйства. Их используют в электроприводе металлорежущих станков, подъёмно-транспортных машин, транспортёров, насосов, вентиляторов. Маломощные двигатели используются в устройствах автоматики.
Широкое применение асинхронных двигателей объясняется их достоинствами по сравнению с другими двигателями: высокая надёжность, возможность работы непосредственно от сети переменного тока, простота обслуживания. Неподвижная часть машины называется статор, подвижная – ротор. Сердечник статора набирается из листовой электротехнической стали и запрессовывается в станину. На рис. 2.1 показан сердечник статора в сборе. Станина (1) выполняется литой, из немагнитного материала. Чаще всего станину выполняют из чугуна или алюминия. На внутренней поверхности листов (2), из которых выполняется сердечник статора, имеются пазы, в которые закладывается трёхфазная обмотка (3). Обмотка статора выполняется в основном из изолированного медного провода круглого или прямоугольного сечения, реже – из алюминия.
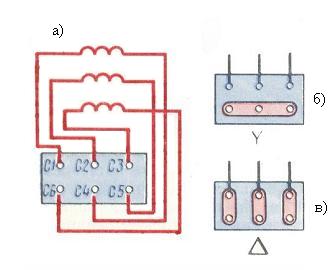
Обмотка статора состоит из трёх отдельных частей, называемых фазами. Начала фаз обозначаются буквами c1,c2,c3, концы – c4,c5,c6.
Начала и концы фаз выведены на клеммник, закреплённый на станине. Обмотка статора может быть соединена по схеме звезда или треугольник. Выбор схемы соединения обмотки статора зависит от линейного напряжения сети и паспортных данных двигателя. В паспорте трёхфазного двигателя задаются линейные напряжения сети и схема соединения обмотки статора. Например, 660/380, Y/∆. Данный двигатель можно включать в сеть с Uл=660В по схеме звезда или в сеть с Uл=380В – по схеме треугольник.
Основное назначение обмотки статора – создание в машине вращающего магнитного поля.
Сердечник ротора набирается из листов электротехнической стали, на внешней стороне которых имеются пазы, в которые закладывается обмотка ротора. Обмотка ротора бывает двух видов:короткозамкнутая и фазная. Соответственно этому асинхронные двигатели бывают с короткозамкнутым ротором и фазным ротором (с контактными кольцами).
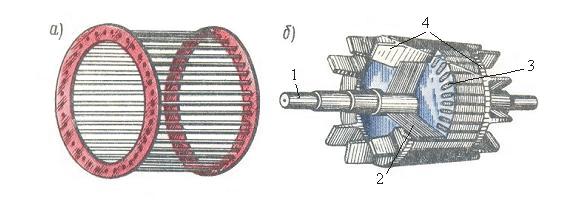
Короткозамкнутая обмотка ротора состоит из стержней 3, которые закладываются в пазы сердечника ротора. С торцов эти стержни замыкаются торцевыми кольцами 4. Такая обмотка напоминает “беличье колесо” и называют её типа “беличьей клетки”. Двигатель с короткозамкнутым ротором не имеет подвижных контактов. За счёт этого такие двигатели обладают высокой надёжностью. Обмотка ротора выполняется из меди, алюминия, латуни и других материалов.
Доливо-Добровольский первым создал двигатель с короткозамкнутым ротором и исследовал его свойства. Он выяснил, что у таких двигателей есть очень серьёзный недостаток – ограниченный пусковой момент. Доливо-Добровольский назвал причину этого недостатка – сильно закороченный ротор. Им же была предложена конструкция двигателя с фазным ротором.
Однафазные асинхронные двигатели.
Асинхронный двигатель является простейшей из электрических машин. Как и любая электрическая машина, он имеет две основные части: статор и ротор.
Статор (рис. 6.1) состоит из чугунной станины 1, в которой закреплен магнитопровод 2 в виде полого цилиндра. Между станиной и сердечником обычно оставляют зазор, через который проходит охлаждающий воздух. Для уменьшения потерь на вихревые токи магнитопровод набирают из тонких (0,5 мм) листов электротехнической стали, изолированных друг от друга лаком.
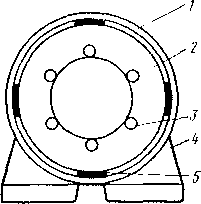
Рис. 6.1. Конструкция статора асинхронного двигателя:
1 — станина; 2 — сердечник; 3 — обмотка;
4 — лапа; 5 — прокладка
В пазы, вырезанные по внутренней окружности статора, укладывают обмотку 3. У двухполюсной машины обмотка статора состоит из трех катушек, сдвинутых на углы 120°, у четырехполюсной — из шести катушек, сдвинутых на 60°, у шестиполюсной — из девяти катушек и т. д. Обмотку в пазах статора закрепляют клиньями.
Ротор также набирают из тонких листов электротехнической стали. В пазах ротора размещают обмотку, которая может быть короткозамкнутой или фазной (рис. 6.2). Короткозамкнутая обмотка типа
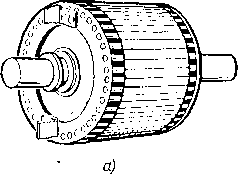
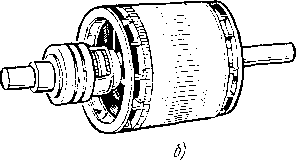
Рис. 6.2. Общий вид ротора асинхронного двигателя с коротко- замкнутой (а) и фазной (б) обмотками
«беличья клетка» изображена на рис. 6.3. Она состоит из толстых проводящих стержней (медь, алюминий), соединенных по торцам медными или алюминиевыми кольцами. Короткозамкнутая обмотка не изолируется от ротора. Иногда ее изготовляют заливкой расплавленного алюминия в пазы ротора.
Контактные кольца1, изготовленные из латуни или меди, укрепляют на валу двигателя с помощью изолирующих прокладок. Щеткодержатель с угольными или медно-графитовыми щетками 2 крепят на подшипниковом щите.
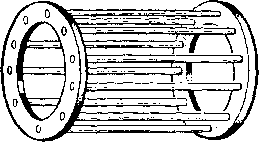
Рис. 6.3. Общий вид коротко- замкнутой обмотки типа «беличья клетка»
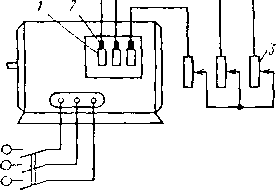
Рис. 6.4. Схема соединения фазной обмотки ротора с регулировочными реостатами:
1 —'контактные кольца, 2— щетки; 3 — реостаты
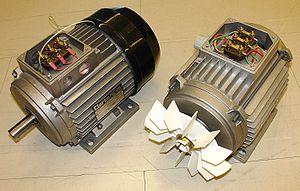
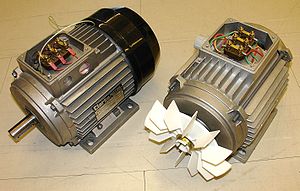
Общий вид асинхронного двигателя показан на рис. 6.5.
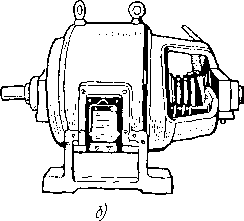
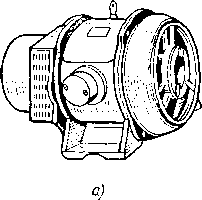
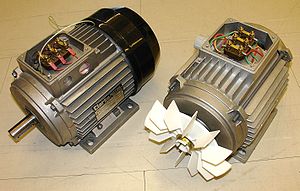
Рис. 6.5. Общий вид асинхронного двигателя с короткозамкнутой (а) и фазной (б) обмотками ротора
Принцип действия асинхронного двигателя.
Принцип действия асинхронного двигателя основан на использовании вращающегося магнитного поля и основных законов электротехники.
При включении двигателя в сеть трехфазного тока в статоре образуется вращающееся магнитное поле, силовые линии которого пересекают стержни или катушки обмотки роторо. При этом, согласно закону электромагнитной индукции, в обмотке ротора индукциреутся ЭДС, пропорциональная частоте пересечения силовых линий. Под действием индуцированной ЭДС в короткозамкнутом роторе возникают значительные токи.
В соответствии с законом Ампера на проводники с током, находящиеся в магнитном поле, действуют механические силы, которые по принципу Ленца стремятся устранить причину, вызывающую индуцированный ток, т. е. пересечение стержней обмотки ротора силовыми линиями вращающегося поля. Таким образом, возникшие механические силы будут раскручивать ротор в направлении вращения поля, уменьшая скорость пересечения стержней обмотки ротора магнитными силовыми линиями.
Достичь частоты вращения поля в реальных условиях ротор не может, так как тогда стержни его обмотки оказались бы неподвижными относительно магнитных силовых линий и индуцированные токи в обмотке ротора исчезли бы. Поэтому ротор вращается с частотой, меньшей частоты вращения поля, т. е. несинхронно с полем, или асинхронно.
Если силы, тормозящие вращение ротора, невелики, то ротор достигает частоты, близкой к частоте вращения поля. При увеличении механической нагрузки на валу двигателя частота вращения ротора уменьшается, токи в обмотке ротора увеличиваются, что приводит к увеличению вращающего момента двигателя. При некоторой частоте вращения ротора устанавливается равновесие между тормозным и вращающим моментами.
Синхронный двигатель
Устройство статора синхронного двигателя аналогично устройству статора асинхронного двигателя. Ротор синхронного двигателя представляет собой электромагнит или постоянный магнит (рис. 6.6).
Принцип работы синхронного двигателя поясняется рис. 6.7. Внутри магнита N1 S1 помещен магнит NS. Если магнит N1 S1 вращать, то он потянет за собой магнит NS. В стационарном режиме частоты вращения обоих магнитов одинаковы.
К валу магнита NS можно приложить механическую нагрузку. Чем больше эта нагрузка, тем больше угол отставания оси магнита NS от оси магнита NiSi. При некоторой нагрузке силы притяжения между магнитами будут преодолены и ротор остановится.
В реальном двигателе поле магнита N1 S1 заменено вращающимся магнитным полем статора; при этом ротор либо вращается синхронно с магнитным полем статора, отставая на угол , либо останавливается (выпадает из синхронизма) при перегрузке. Таким образом, независимо от нагрузки ротор всегда вращается с постоянной частотой, равной частоте вращения магнитного поля статора:
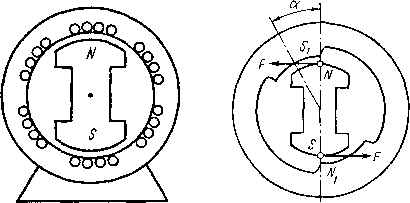
Рис. 6.6. Схематическое изображение Рис. 6.7. К пояснению принципа синхронного двигателя работы синхронного двигателя
Постоянство частоты вращения — важное достоинство синхронного двигателя. Строгое постоянство частоты вращения требуется во многих областях техники, например при записи и воспроизведении звука. Недостаток синхронного двигателя — трудность пуска: для пуска нужно раскрутить ротор в сторону вращения поля статора. Для этого чаще всего применяют специальную короткозамкнутую обмотку, вделанную в ротор. В момент пуска двигатель работает как асинхронный. Когда частота вращения ротора приближается к частоте вращения поля статора, ротор входит в синхронизм и двигатель работает как синхронный. Короткозамкнутая обмотка при этом оказывается обесточенной, так как частота вращения ротора равна частоте вращения поля статора и стержни обмотки ротора не пересекаются магнитными силовыми линиями.
В настоящее время существует тенденция замены на подвижных объектах (корабли, самолеты, автомобили) электрических цепей постоянного тока цепями переменного тока повышенной частоты (200, 400 Гц и выше). Возможность использования бесколлекторных машин переменного тока, трансформаторов и магнитных усилителей позволяет повысить надежность работы цепи, а также уменьшить габариты и массу машин и аппаратов.
При оборудовании объекта сетью переменного тока широкое применение находит электропривод на переменном токе. Разработаны схемы с асинхронными и синхронными двигателями, которые позволяют выполнить все операции, осуществляемые ранее двигателями постоянного тока.
Преимущества асинхронных двигателей особенно заметны тогда, когда по условиям работы привода нет необходимости в плавном регулировании частоты вращения в широких пределах и больших пусковых моментах (привод насосов, вентиляторов и др.).
Синхронные двигатели особенно удобны для привода роторов гироскопов. В тех случаях, когда гироскоп используют для особо точных измерений (например, в баллистических ракетах), приводом ротора гироскопа служит синхронный двигатель. При этом частота вращения ротора зависит только от конструкции двигателя и частоты питающего тока, которую можно стабилизировать с очень высокой степенью точности.
Синхронный генератор
Ротор синхронных машин вращается синхронно с вращающимся магнитным полем (отсюда их название). Поскольку частоты вращения ротора и магнитного поля одинаковы, в обмотке ротора не индуцируются токи. Поэтому обмотка ротора получает питание от источника постоянного тока.
Устройство статора синхронной машины (рис. 6.8) практически не отличается от устройства статора асинхронной машины.
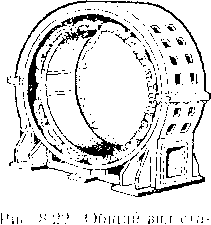
Рис 6.8. Общий вид статора синхронного генератора.
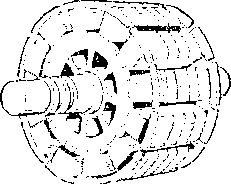
Рис 6.9. Общий вид неявнополюсного ротора синхронного генератора.
Роторы синхронных генераторов могут быть явнополюсными (рис. 6.9) и неявнополюсными (рис. 6.10). В первом случае синхронные генераторы приводятся в действие тихоходными турбинами гидроэлектростанций, во втором — паровыми или газовыми турбинами теплоэлектростанций.

Рис. 6.10. Общий вид неявнополюсного ротора синхронного генератора
Используют различные способы возбуждения синхронных генераторов. Широкое распространение получил синхронный генератор с машинным возбудителем, представляющим собой генератор постоянного тока, расположенный на одном валу с синхронным генератором. Машинный возбудитель приводится в действие от того же первичного двигателя, что и синхронный генератор. Выходные зажимы возбудителя через щетки и кольца подсоединены к обмотке ротора синхронного генератора. Напряжение синхронного генератора можно регулировать реостатом в цепи обмотки возбуждения возбудителя, что удобно и энергетически выгодно, так как в этой обмотке протекают сравнительно небольшие токи.
Находят также применение генераторы с самовозбуждением через полупроводниковые или механические выпрямители.
Из характеристик синхронного генератора наибольший практический интерес представляют внешние характеристики, выражающие зависимость напряжения на зажимах генератора от тока нагрузки при неизменных значениях тока возбуждения, частоты и коэффициента мощности.
infourok.ru

 Электродвигатели разной мощности (750 Вт, 25 Вт, к CD-плееру, к игрушке, к дисководу). Батарейка «Крона» дана для сравнения
Электродвигатели разной мощности (750 Вт, 25 Вт, к CD-плееру, к игрушке, к дисководу). Батарейка «Крона» дана для сравнения Электрический двигатель — электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую, побочным эффектом является выделение тепла.
В основу работы любой электрической машины положен принцип электромагнитной индукции.
Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.Ротор может быть:
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая болгарка, если выкинуть электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещенный в магнитное поле, действует эдс), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов. Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора. Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трехфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надежнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно с вращающимся полем статора. Там, где нет трехфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трехфазного двигателя, пространственно смещенные на 120°, соединяются друг с другом звездой или треугольником.

Рис.1. Трехфазный двухполюсный асинхронный двигатель
На рис.1. показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трехфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f: nc=f/p
При частоте 50 Гц получаем для р = 1, 2, 3 (двух-, четырех- и шести полюсных машин) синхронные частоты вращения поля nc = 3000, 1500 и 1000 об/мин.
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с беличьей клеткой) или ротора с контактными кольцами (фазный ротор).
В короткозамкнутом роторе обмотка состоит из металлических стержней (медь, бронза или алюминий), которые расположены в пазах и соединяются на концах закорачивающими кольцами (рис. 1). Соединение осуществляется методом пайки твердым припоем или сваркой. В случае применения алюминия или алюминиевых сплавов стержни ротора и заколачивающие кольца, включая лопасти вентилятора, расположенные на них, изготавливаются методом литья под давлением.
У ротора электродвигателя с контактными кольцами в пазах находится трехфазная обмотка, похожая на обмотку статора, включенную, например, звездой; начала фаз соединяются с тремя контактными кольцами, закрепленными на валу. При пуске двигателя и для регулировки частоты вращения можно подключить к фазам обмотки ротора реостаты (через контактные кольца и щетки). После успешного разбега контактные кольца замыкаются накоротко, так что обмотка ротора двигателя выполняет те же самые функции, что и в случае короткозамкнутого ротора.
Устройство асинхронного двигателя http://techno.x51.ru/index.php?mod=text&uitxt=905
По принципу возникновения вращающего момента электродвигатели можно разделить на гистерезисные и магнитоэлектрические. У двигателей первой группы вращающий момент создается вследствие гистерезиса при перемагничивании ротора. Данные двигатели не являются традиционными и не широко распространены в промышленности.
Наиболее распространены магнитоэлектрические двигатели, которые по типу потребляемой энергии подразделяется на две большие группы — на двигатели постоянного тока и двигатели переменного тока (также существуют универсальные двигатели, которые могут питаться обоими видами тока).
 Двигатель постоянного тока в разрезе. Справа расположен коллектор с щётками
Двигатель постоянного тока в разрезе. Справа расположен коллектор с щётками Двигатель постоянного тока — электрический двигатель, питание которого осуществляется постоянным током. Данная группа двигателей в свою очередь по наличию щёточно-коллекторного узла подразделяется на:
Щёточно-коллекторный узел обеспечивает электрическое соединение цепей вращающейся и неподвижной части машины и является наиболее ненадежным и сложным в обслуживании конструктивным элементом.[1]
По типу возбуждения коллекторные двигатели можно разделить на:
Двигатели с самовозбуждением делятся на:
Бесколлекторные двигатели (вентильные двигатели) — электродвигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора, системы управления (преобразователя координат) и силового полупроводникового преобразователя (инвертора). Принцип работы данных двигателей аналогичен принципу работы синхронных двигателей.[2]
 Трехфазные асинхронные двигатели
Трехфазные асинхронные двигатели Двигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током. По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели. Принципиальное различие состоит в том, что в синхронных машинах первая гармоника магнитодвижущей силы статора движется со скоростью вращения ротора (благодаря чему сам ротор вращается со скоростью вращения магнитного поля в статоре), а у асинхронных — всегда есть разница между скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле вращается быстрее ротора).
Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения. Данные двигатели обычно используются при больших мощностях (от сотен киловатт и выше).[2]
Существуют синхронные двигатели с дискретным угловым перемещением ротора — шаговые двигатели. У них заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие. Ещё один вид синхронных двигателей — вентильный реактивный электродвигатель, питание обмоток которого формируется при помощи полупроводниковых элементов.
Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением. Эти двигатели наиболее распространены в настоящее время.
По количеству фаз двигатели переменного тока подразделяются на:
Универсальный коллекторный электродвигатель — коллекторный электродвигатель, который может работать и на постоянном токе и на переменном токе. Изготавливается только с последовательной обмоткой возбуждения на мощности до 200 Вт. Статор выполняется шихтованным из специальной электротехнической стали. Обмотка возбуждения включается частично при переменном токе и полностью при постоянном. Для переменного тока номинальные напряжения 127,220., для постоянного 110.220. Применяется в бытовых аппаратах, электроинструментах. Двигатели переменного тока с питанием от промышленной сети 50 гц не позволяют получить частоту вращения выше 3000 об/мин. Поэтому для получения высоких частот применяют коллекторный электродвигатель, который к тому же получается легче и меньше двигателя переменного тока той же мощности или применяют специальные передаточные механизмы, изменяющие кинематические параметры механизма до необходимых нам (мультипликаторы). При применении преобразователей частоты или наличии сети повышенной частоты (100, 200, 400 Гц) двигатели переменного тока оказываются легче и меньше коллекторных двигателей (коллекторный узел иногда занимает половину пространства). Ресурс асинхронных двигателей переменного тока гораздо выше, чем у коллекторных, и определяется состоянием подшипников и изоляции обмоток.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока.
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в пул ртути. Постоянный магнит был установлен в середине пула ртути. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется в школьных классах физики, вместо токсичной ртути используют рассол. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлоу. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности. Изобретатели стремились создать электродвигатель для производственных нужд. Они пытались заставить железный сердечник двигаться в поле электромагнита возвратно-поступательно, то есть так, как движется поршень в цилиндре паровой машины. Русский ученый Б. С. Якоби пошел иным путем. В 1834 г. он создал первый в мире практически пригодный электродвигатель с вращающимся якорем и опубликовал теоретическую работу «О применении электромагнетизма для приведения в движение машины». Б. С. Якоби писал, что его двигатель несложен и «дает непосредственно круговое движение, которого гораздо легче преобразовать в другие виды движения, чем возвратно-поступательное».
Вращательное движение якоря в двигателе Якоби происходило вследствие попеременного притяжения и отталкивания электромагнитов. Неподвижная группа U-образных электромагнитов питалась током непосредственно от гальванической батареи, причем направление тока в этих электромагнитах оставалось неизменным. Подвижная группа электромагнитов была подключена к батарее через коммутатор, с помощью которого направление тока в каждом электромагните изменялось раз за один оборот диска. Полярность электромагнитов при этом соответственно изменялась, а каждый из подвижных электромагнитов попеременного притягивался и отталкивался соответствующим неподвижным электромагнитом: вал двигателя начинал вращаться. Мощность такого двигателя составляла всего 15 Вт. Впоследствии Якоби довел мощность электродвигателя до 550 Вт. Этот двигатель был установлен сначала на лодке, а позже на железнодорожной платформе.
13 сентября 1838 г. лодка с 12 пассажирами поплыла по Неве против течения со скоростью около 3 км/ч. Лодка была снабжена колесами с лопастями. Колеса приводились во вращение электрическим двигателем, который получал ток от батареи из 320 гальванических элементов. Так впервые электрический двигатель появился на судне.
dik.academic.ru

 Электродвигатели разной мощности (750 Вт, 25 Вт, к CD-плееру, к игрушке, к дисководу). Батарейка «Крона» дана для сравнения
Электродвигатели разной мощности (750 Вт, 25 Вт, к CD-плееру, к игрушке, к дисководу). Батарейка «Крона» дана для сравнения Электрический двигатель — электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую, побочным эффектом является выделение тепла.
В основу работы любой электрической машины положен принцип электромагнитной индукции.
Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.Ротор может быть:
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая болгарка, если выкинуть электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещенный в магнитное поле, действует эдс), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов. Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора. Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трехфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надежнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно с вращающимся полем статора. Там, где нет трехфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трехфазного двигателя, пространственно смещенные на 120°, соединяются друг с другом звездой или треугольником.

Рис.1. Трехфазный двухполюсный асинхронный двигатель
На рис.1. показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трехфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f: nc=f/p
При частоте 50 Гц получаем для р = 1, 2, 3 (двух-, четырех- и шести полюсных машин) синхронные частоты вращения поля nc = 3000, 1500 и 1000 об/мин.
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с беличьей клеткой) или ротора с контактными кольцами (фазный ротор).
В короткозамкнутом роторе обмотка состоит из металлических стержней (медь, бронза или алюминий), которые расположены в пазах и соединяются на концах закорачивающими кольцами (рис. 1). Соединение осуществляется методом пайки твердым припоем или сваркой. В случае применения алюминия или алюминиевых сплавов стержни ротора и заколачивающие кольца, включая лопасти вентилятора, расположенные на них, изготавливаются методом литья под давлением.
У ротора электродвигателя с контактными кольцами в пазах находится трехфазная обмотка, похожая на обмотку статора, включенную, например, звездой; начала фаз соединяются с тремя контактными кольцами, закрепленными на валу. При пуске двигателя и для регулировки частоты вращения можно подключить к фазам обмотки ротора реостаты (через контактные кольца и щетки). После успешного разбега контактные кольца замыкаются накоротко, так что обмотка ротора двигателя выполняет те же самые функции, что и в случае короткозамкнутого ротора.
Устройство асинхронного двигателя http://techno.x51.ru/index.php?mod=text&uitxt=905
По принципу возникновения вращающего момента электродвигатели можно разделить на гистерезисные и магнитоэлектрические. У двигателей первой группы вращающий момент создается вследствие гистерезиса при перемагничивании ротора. Данные двигатели не являются традиционными и не широко распространены в промышленности.
Наиболее распространены магнитоэлектрические двигатели, которые по типу потребляемой энергии подразделяется на две большие группы — на двигатели постоянного тока и двигатели переменного тока (также существуют универсальные двигатели, которые могут питаться обоими видами тока).
 Двигатель постоянного тока в разрезе. Справа расположен коллектор с щётками
Двигатель постоянного тока в разрезе. Справа расположен коллектор с щётками Двигатель постоянного тока — электрический двигатель, питание которого осуществляется постоянным током. Данная группа двигателей в свою очередь по наличию щёточно-коллекторного узла подразделяется на:
Щёточно-коллекторный узел обеспечивает электрическое соединение цепей вращающейся и неподвижной части машины и является наиболее ненадежным и сложным в обслуживании конструктивным элементом.[1]
По типу возбуждения коллекторные двигатели можно разделить на:
Двигатели с самовозбуждением делятся на:
Бесколлекторные двигатели (вентильные двигатели) — электродвигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора, системы управления (преобразователя координат) и силового полупроводникового преобразователя (инвертора). Принцип работы данных двигателей аналогичен принципу работы синхронных двигателей.[2]
 Трехфазные асинхронные двигатели
Трехфазные асинхронные двигатели Двигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током. По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели. Принципиальное различие состоит в том, что в синхронных машинах первая гармоника магнитодвижущей силы статора движется со скоростью вращения ротора (благодаря чему сам ротор вращается со скоростью вращения магнитного поля в статоре), а у асинхронных — всегда есть разница между скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле вращается быстрее ротора).
Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения. Данные двигатели обычно используются при больших мощностях (от сотен киловатт и выше).[2]
Существуют синхронные двигатели с дискретным угловым перемещением ротора — шаговые двигатели. У них заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие. Ещё один вид синхронных двигателей — вентильный реактивный электродвигатель, питание обмоток которого формируется при помощи полупроводниковых элементов.
Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением. Эти двигатели наиболее распространены в настоящее время.
По количеству фаз двигатели переменного тока подразделяются на:
Универсальный коллекторный электродвигатель — коллекторный электродвигатель, который может работать и на постоянном токе и на переменном токе. Изготавливается только с последовательной обмоткой возбуждения на мощности до 200 Вт. Статор выполняется шихтованным из специальной электротехнической стали. Обмотка возбуждения включается частично при переменном токе и полностью при постоянном. Для переменного тока номинальные напряжения 127,220., для постоянного 110.220. Применяется в бытовых аппаратах, электроинструментах. Двигатели переменного тока с питанием от промышленной сети 50 гц не позволяют получить частоту вращения выше 3000 об/мин. Поэтому для получения высоких частот применяют коллекторный электродвигатель, который к тому же получается легче и меньше двигателя переменного тока той же мощности или применяют специальные передаточные механизмы, изменяющие кинематические параметры механизма до необходимых нам (мультипликаторы). При применении преобразователей частоты или наличии сети повышенной частоты (100, 200, 400 Гц) двигатели переменного тока оказываются легче и меньше коллекторных двигателей (коллекторный узел иногда занимает половину пространства). Ресурс асинхронных двигателей переменного тока гораздо выше, чем у коллекторных, и определяется состоянием подшипников и изоляции обмоток.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока.
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в пул ртути. Постоянный магнит был установлен в середине пула ртути. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется в школьных классах физики, вместо токсичной ртути используют рассол. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлоу. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности. Изобретатели стремились создать электродвигатель для производственных нужд. Они пытались заставить железный сердечник двигаться в поле электромагнита возвратно-поступательно, то есть так, как движется поршень в цилиндре паровой машины. Русский ученый Б. С. Якоби пошел иным путем. В 1834 г. он создал первый в мире практически пригодный электродвигатель с вращающимся якорем и опубликовал теоретическую работу «О применении электромагнетизма для приведения в движение машины». Б. С. Якоби писал, что его двигатель несложен и «дает непосредственно круговое движение, которого гораздо легче преобразовать в другие виды движения, чем возвратно-поступательное».
Вращательное движение якоря в двигателе Якоби происходило вследствие попеременного притяжения и отталкивания электромагнитов. Неподвижная группа U-образных электромагнитов питалась током непосредственно от гальванической батареи, причем направление тока в этих электромагнитах оставалось неизменным. Подвижная группа электромагнитов была подключена к батарее через коммутатор, с помощью которого направление тока в каждом электромагните изменялось раз за один оборот диска. Полярность электромагнитов при этом соответственно изменялась, а каждый из подвижных электромагнитов попеременного притягивался и отталкивался соответствующим неподвижным электромагнитом: вал двигателя начинал вращаться. Мощность такого двигателя составляла всего 15 Вт. Впоследствии Якоби довел мощность электродвигателя до 550 Вт. Этот двигатель был установлен сначала на лодке, а позже на железнодорожной платформе.
13 сентября 1838 г. лодка с 12 пассажирами поплыла по Неве против течения со скоростью около 3 км/ч. Лодка была снабжена колесами с лопастями. Колеса приводились во вращение электрическим двигателем, который получал ток от батареи из 320 гальванических элементов. Так впервые электрический двигатель появился на судне.
xzsad.academic.ru

 Электродвигатели разной мощности (750 Вт, 25 Вт, к CD-плееру, к игрушке, к дисководу). Батарейка «Крона» дана для сравнения
Электродвигатели разной мощности (750 Вт, 25 Вт, к CD-плееру, к игрушке, к дисководу). Батарейка «Крона» дана для сравнения Электрический двигатель — электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую, побочным эффектом является выделение тепла.
В основу работы любой электрической машины положен принцип электромагнитной индукции.
Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.Ротор может быть:
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая болгарка, если выкинуть электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещенный в магнитное поле, действует эдс), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов. Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора. Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трехфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надежнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно с вращающимся полем статора. Там, где нет трехфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трехфазного двигателя, пространственно смещенные на 120°, соединяются друг с другом звездой или треугольником.

Рис.1. Трехфазный двухполюсный асинхронный двигатель
На рис.1. показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трехфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f: nc=f/p
При частоте 50 Гц получаем для р = 1, 2, 3 (двух-, четырех- и шести полюсных машин) синхронные частоты вращения поля nc = 3000, 1500 и 1000 об/мин.
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с беличьей клеткой) или ротора с контактными кольцами (фазный ротор).
В короткозамкнутом роторе обмотка состоит из металлических стержней (медь, бронза или алюминий), которые расположены в пазах и соединяются на концах закорачивающими кольцами (рис. 1). Соединение осуществляется методом пайки твердым припоем или сваркой. В случае применения алюминия или алюминиевых сплавов стержни ротора и заколачивающие кольца, включая лопасти вентилятора, расположенные на них, изготавливаются методом литья под давлением.
У ротора электродвигателя с контактными кольцами в пазах находится трехфазная обмотка, похожая на обмотку статора, включенную, например, звездой; начала фаз соединяются с тремя контактными кольцами, закрепленными на валу. При пуске двигателя и для регулировки частоты вращения можно подключить к фазам обмотки ротора реостаты (через контактные кольца и щетки). После успешного разбега контактные кольца замыкаются накоротко, так что обмотка ротора двигателя выполняет те же самые функции, что и в случае короткозамкнутого ротора.
Устройство асинхронного двигателя http://techno.x51.ru/index.php?mod=text&uitxt=905
По принципу возникновения вращающего момента электродвигатели можно разделить на гистерезисные и магнитоэлектрические. У двигателей первой группы вращающий момент создается вследствие гистерезиса при перемагничивании ротора. Данные двигатели не являются традиционными и не широко распространены в промышленности.
Наиболее распространены магнитоэлектрические двигатели, которые по типу потребляемой энергии подразделяется на две большие группы — на двигатели постоянного тока и двигатели переменного тока (также существуют универсальные двигатели, которые могут питаться обоими видами тока).
 Двигатель постоянного тока в разрезе. Справа расположен коллектор с щётками
Двигатель постоянного тока в разрезе. Справа расположен коллектор с щётками Двигатель постоянного тока — электрический двигатель, питание которого осуществляется постоянным током. Данная группа двигателей в свою очередь по наличию щёточно-коллекторного узла подразделяется на:
Щёточно-коллекторный узел обеспечивает электрическое соединение цепей вращающейся и неподвижной части машины и является наиболее ненадежным и сложным в обслуживании конструктивным элементом.[1]
По типу возбуждения коллекторные двигатели можно разделить на:
Двигатели с самовозбуждением делятся на:
Бесколлекторные двигатели (вентильные двигатели) — электродвигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора, системы управления (преобразователя координат) и силового полупроводникового преобразователя (инвертора). Принцип работы данных двигателей аналогичен принципу работы синхронных двигателей.[2]
 Трехфазные асинхронные двигатели
Трехфазные асинхронные двигатели Двигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током. По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели. Принципиальное различие состоит в том, что в синхронных машинах первая гармоника магнитодвижущей силы статора движется со скоростью вращения ротора (благодаря чему сам ротор вращается со скоростью вращения магнитного поля в статоре), а у асинхронных — всегда есть разница между скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле вращается быстрее ротора).
Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения. Данные двигатели обычно используются при больших мощностях (от сотен киловатт и выше).[2]
Существуют синхронные двигатели с дискретным угловым перемещением ротора — шаговые двигатели. У них заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие. Ещё один вид синхронных двигателей — вентильный реактивный электродвигатель, питание обмоток которого формируется при помощи полупроводниковых элементов.
Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением. Эти двигатели наиболее распространены в настоящее время.
По количеству фаз двигатели переменного тока подразделяются на:
Универсальный коллекторный электродвигатель — коллекторный электродвигатель, который может работать и на постоянном токе и на переменном токе. Изготавливается только с последовательной обмоткой возбуждения на мощности до 200 Вт. Статор выполняется шихтованным из специальной электротехнической стали. Обмотка возбуждения включается частично при переменном токе и полностью при постоянном. Для переменного тока номинальные напряжения 127,220., для постоянного 110.220. Применяется в бытовых аппаратах, электроинструментах. Двигатели переменного тока с питанием от промышленной сети 50 гц не позволяют получить частоту вращения выше 3000 об/мин. Поэтому для получения высоких частот применяют коллекторный электродвигатель, который к тому же получается легче и меньше двигателя переменного тока той же мощности или применяют специальные передаточные механизмы, изменяющие кинематические параметры механизма до необходимых нам (мультипликаторы). При применении преобразователей частоты или наличии сети повышенной частоты (100, 200, 400 Гц) двигатели переменного тока оказываются легче и меньше коллекторных двигателей (коллекторный узел иногда занимает половину пространства). Ресурс асинхронных двигателей переменного тока гораздо выше, чем у коллекторных, и определяется состоянием подшипников и изоляции обмоток.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока.
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в пул ртути. Постоянный магнит был установлен в середине пула ртути. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется в школьных классах физики, вместо токсичной ртути используют рассол. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлоу. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности. Изобретатели стремились создать электродвигатель для производственных нужд. Они пытались заставить железный сердечник двигаться в поле электромагнита возвратно-поступательно, то есть так, как движется поршень в цилиндре паровой машины. Русский ученый Б. С. Якоби пошел иным путем. В 1834 г. он создал первый в мире практически пригодный электродвигатель с вращающимся якорем и опубликовал теоретическую работу «О применении электромагнетизма для приведения в движение машины». Б. С. Якоби писал, что его двигатель несложен и «дает непосредственно круговое движение, которого гораздо легче преобразовать в другие виды движения, чем возвратно-поступательное».
Вращательное движение якоря в двигателе Якоби происходило вследствие попеременного притяжения и отталкивания электромагнитов. Неподвижная группа U-образных электромагнитов питалась током непосредственно от гальванической батареи, причем направление тока в этих электромагнитах оставалось неизменным. Подвижная группа электромагнитов была подключена к батарее через коммутатор, с помощью которого направление тока в каждом электромагните изменялось раз за один оборот диска. Полярность электромагнитов при этом соответственно изменялась, а каждый из подвижных электромагнитов попеременного притягивался и отталкивался соответствующим неподвижным электромагнитом: вал двигателя начинал вращаться. Мощность такого двигателя составляла всего 15 Вт. Впоследствии Якоби довел мощность электродвигателя до 550 Вт. Этот двигатель был установлен сначала на лодке, а позже на железнодорожной платформе.
13 сентября 1838 г. лодка с 12 пассажирами поплыла по Неве против течения со скоростью около 3 км/ч. Лодка была снабжена колесами с лопастями. Колеса приводились во вращение электрическим двигателем, который получал ток от батареи из 320 гальванических элементов. Так впервые электрический двигатель появился на судне.
ushakov.academic.ru

Электродвигатели разной мощности (750 Вт, 25 Вт, к CD-плееру, к игрушке, к дисководу)
Электрический двигатель — это, электрическая машина, в которой электрическая энергия преобразуется в механическую, побочным эффектом является выделение тепла.

Из-за связи с низкой частотой сети (50 Герц) асинхронные и синхронные двигатели имеют больший вес и размеры, чем коллекторный двигатель постоянного тока и универсальный коллекторный двигатель той же мощности. При применении выпрямителя и инвертора с частотой значительно большей 50 Гц вес и размеры асинхронных и синхронных двигателей приближаются к весу и размерам коллекторного двигателя постоянного тока и универсального коллекторного двигателя той же мощности.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока.
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в пул ртути. Постоянный магнит был установлен в середине пула ртути. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется в школьных классах физики, вместо токсичной ртути используют рассол. Это - самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлова. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности.
Wikimedia Foundation. 2010.
электродвигатель переменного тока — — [А.С.Гольдберг. Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом EN ас motor … Справочник технического переводчика
Электродвигатель постоянного тока — Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, ма … Википедия
Переменного тока электродвигатель — машина переменного тока, предназначенная для работы в режиме двигателя (см. Переменного тока машина). П. т. э. подразделяют на синхронные и асинхронные. Синхронные электродвигатели (См. Синхронный электродвигатель) применяют в… … Большая советская энциклопедия
Переменного тока машина — электрическая машина, применяемая для получения переменного тока (генератор) или для преобразования электрической энергии в механическую (двигатель) либо в электрическую энергию другого напряжения или частоты (преобразователь) П. т. м.… … Большая советская энциклопедия
ПЕРЕМЕННОГО ТОКА ЭЛЕКТРОДВИГАТЕЛЬ — машина перем. тока, предназнач. для работы в режиме двигателя. П. т. э. подразделяют на синхронные и асинхронные. Синхронные электродвигатели применяют в электроприводах в осн. тогда, когда требуется постоянство угловой скорости. Из асинхронных… … Большой энциклопедический политехнический словарь
электропривод переменного тока — электропривод постоянного [переменного] тока Электропривод, содержащий электродвигатель постоянного [переменного] тока. [ГОСТ Р 50369 92] Тематики электропривод EN ac drivealternating current drive DE Wechselstromantrieb … Справочник технического переводчика
электропривод постоянного (переменного) тока — 3.1.3 электропривод постоянного (переменного) тока: Привод, содержащий электродвигатель постоянного (переменного) тока и редуктор; Источник: СТ ЦКБА 087 2010: Арматура трубопроводная. Электроприводы. Общие технические условия … Словарь-справочник терминов нормативно-технической документации
ЭЛЕКТРОДВИГАТЕЛЬ — (электрический двигатель) машина, преобразующая подводимую внешнюю электрическую энергию в механическую, обычно энергию вращения. Э. имеют в общих чертах то же устройство, что и генераторы (см. ), но основаны на обратном принципе действия.… … Большая политехническая энциклопедия
ЭЛЕКТРОДВИГАТЕЛЬ, ЭЛЕКТРОМОТОР — (Electric motor) электрическая машина, служащая для преобразования подводимой к ней извне электрической энергии в механическую. Различают Э. постоянного тока и переменного тока. Э. постоянного тока бывают с последовательным возбуждением,… … Морской словарь
ЭЛЕКТРОДВИГАТЕЛЬ — электромотор, машина, преобразующая получаемую ею электр. энергию в механическую. Большинство Э. не отличается по конструкции от электр. генераторов (см. Генератор электрический), к рые при использовании их в качестве Э. не приводятся во вращение … Технический железнодорожный словарь
dic.academic.ru