Содержание
Слабоумие и отвага! Мощный электросамокат из обычного своими руками.
За последние 20 лет технический прогресс подарил нам много невероятных инноваций и решений, которые сильно повлияли на качество нашей жизни. Одной из таких технических инноваций стал электро самокат. Это портативное персональное электрическое транспортное средство которое можно носить в метро и быстро перемещаться по городу на расстояние 15-30 км. На котором можно кататься летом в парке, ехать на работу, получать адреналин, и быть безумно мобильным. Заряжаем от сети 3-4 часа, и можно снова в путь.
И вот вы захотели себе электро самокат. Где же его взять? Тут есть два варианта купить или построить самому. Что? Самому? Да как такое возможно?
Построить электро самокат своими руками? Возможно! И в этой статье я расскажу вам как изготовить электро самокат своими руками. Но прежде давайте разберёмся зачем это нужно. Быть может проще купить?
Да купить проще. Но дорого. И купить что? Передний природный самокат? Который мягко говоря не валит стоя при этом много денег? Существует конечно дорогие модели которые быстро едут стоит много денег но зачастую производители работая на Европейский рынок накладывают ограничения по скорости которые далеко не всегда можно обойти. А вдруг вам завтра захочется быстрее, мощнее, или наоборот легче, чтоб носить одной рукой в метро не напрягаясь. Так вот. Самостоятельная сборка самоката позволяет вам вносить любые модификации в конституцию, изменяя мощность и вес согласно вашим потребностям.
А вдруг вам завтра захочется быстрее, мощнее, или наоборот легче, чтоб носить одной рукой в метро не напрягаясь. Так вот. Самостоятельная сборка самоката позволяет вам вносить любые модификации в конституцию, изменяя мощность и вес согласно вашим потребностям.
Ну вот вы решили, что покупка не ваш путь, и вы хотите собрать персональное транспортное средство своими руками. Для этого вам потребуется умение владеть паяльником, держать в руках шуруповерт, сверлить дырочки в металле прямыми руками, все остальное за вас сделают наши друзья китайцы. И так если вы любите конструировать, и не видите преград для реализации своих творческих способностей, мы готовы обеспечить вас необходимыми деталями советами и частями для создания своего собственного транспортного средства.
Для начала вам нужно определиться что это будет. Будет ли это большой мощный самокат на надувных колесах, который будет пулять на большие расстояния наматывая асфальт на колеса, или это будет складной легкий самокат, который можно без проблем таскать одной рукой в метро, добираясь до работы или тренажерного зала в другом районе, минуя душный общественный транспорт.
Начнем со складной конструкцией нам нужно выбрать складной самокат с задним амортизатором нужно будет заменить ему заднюю вилку на расширенную установить туда мотор купить контроллер, аккумулятор, куда ни будь это все засунуть и это подключить.
Начнем с выбора самоката для наших экспериментов. Тут все просто выбор крайне мал. Некоторое количество лет назад китайцы придумали двух подвесную самокатную раму на которой разные производители начали делать разные самокаты. Она нам и нужна. Чем дороже будет производитель тем по идее лучше качество запчастей из которых она собрана. Складная двух подвесная рама в прицепите не может быть надежной, но выбора у нас нет. Электро самокат будет иметь те же проблемы что обычные самокат и к этому нужно быть готовыми. У него будет точно так же разбалтываться движущиеся части. Болтаться, скрипеть, шуметь. Чем больше движущихся частей там больше нужно за всем этим следить. Это касается покупных складных самокатов и самодельных. Зачем же выбирать двухподвесный самокат? А за тем что первым шагом будет замена задней вилки и колеса на мотор.
И так сборка элетросамоката своими руками по шагам.
- Меняем заднюю вилку на расширенную, устанавливаем туда мотор колесо.
- Собираем корпус из алюминиевого профиля
- Делаем крепления для крышки на которую будем вставать ногами.
- Изготавливаем крышку
- Устанавливаем контролер и ручку газа
- Устанавливаем батарею и автомат
- Соединяем
Далее подробное описание и фото с ремонта моего домашнего самоката которому уже 3 года. За 3 года я устал от люфтов рамы и потому сделал его не складным, Усилив его более толстыми болтами в местах люфта. Так же за 3 года на нем поменялось несколько разных корпусов и батарей потому приходилось все подгонять под уже сделаные ранее отверстия. Вам же я рекомендую сначала выгнуть боковые ребра заметить что где будет а потом уже сверлить и тогда больше шансов что будет все ровно и аккуратно.
- Меняем заднюю вилку на расширенную, устанавливаем туда мотор колесо.


При сборки есть вариант столкнуться с некоторыми сложностями, которые решаются с помощью сверла, напильника и проставок, купленные в крепмаркете.
- Собираем корпус из алюминиевого профиля
Профиль можно исспользовать любой подходящий под задачи. Я использовал 50мм. Так как нужно было поместить внутри батарею 48в 10Ач
Профиль вырезаем под размер, клеим на момент, сверлим маленькие дырки под саморезы, и сажаем на саморезы по металлу. Профиль выгибаем по форме деки.
3)Делаем крепления для крышки на которую будем вставать ногами.
Крепление было решено делать из болтов.
Варианты с длиной толщеной подбирайте сами в зависимости от выбранного корпуса.
Так же можно использовать самоконтрящиеся гайки. Как у меня на передних двух стойках.
У кого то возникнет вопрос. А как вообще тонкая крышка будет держать мой вес на этих четырех точках? Ответ: а легко. Потому что точек сильно больше чем четыре. Ведь по мимо четырех болтов есть еще и боковины корпуса. Но основная нагрузка будет на батарее. Точнее на хитрой конструкции батареи которую вы можете заказать у нас. А можете изготовить сами.
А как вообще тонкая крышка будет держать мой вес на этих четырех точках? Ответ: а легко. Потому что точек сильно больше чем четыре. Ведь по мимо четырех болтов есть еще и боковины корпуса. Но основная нагрузка будет на батарее. Точнее на хитрой конструкции батареи которую вы можете заказать у нас. А можете изготовить сами.
Секрет в том что крышка опирается на квадратики из толстого пластика толщеной 3-4 мм, вставленного между ячейками.
- Изготавливаем крышку
Крышка делается из алюминиевого профиля с помощью ножниц по металлу.
Внутренняя часть крышки.
Нужно удалить лишние внутренние ребра крышки. Это легко сделать плоскогубцами, если как бы зажать край ребра и начать крутить плоскогубцы, то это ребро легко намотается на них. Изнутри лучше проклеить пленкой. Я использовал папку для бумаг.
- Устанавливаем контролер и ручку газа
С ручкой газа все понятно.
Контроллер достаем из алюминиевого корпуса, герметизируем хоз лентой.
Я использовал контролер инфинион 6 fet. Но ему пришлось подпиливать текстолит, что б он влез.
Так же существует бюджетный контролоер Бафанг 500вт в маленьком корпусе который имеет 3 скорости рекуперацию и ест из батареи 14 ампер. Но главное его достоинство что он подходит в эту деку без корпуса и его не нужно допиливать. Его вы тоже можете приобрести у нас.
С боку в деке сверлиться дырка. В радиаторе контроллера есть отверстия за которые можно закрепить его через эту дырку.
Так же отсек с контроллером и проводами необходимо закрыть крышкой. Я сделал крышку из крышки матрицы ноутбука, хотя подойдет любой листовой пластик.
Когда делался этот самокат, еще не существовало ручек газа со встроенным вольтметром, поэтому пришлось городить вольт ампер основании руля. Что добавило много проводов. Сейчас же все проще.
И не каких проблем.
Устанавливаем батарею и автомат
Батарея обмотана скотчем для лучшей изоляции от влаги. Так же имеет смысл приклеить батарею к деки на двухсторонний скотч или клей момент. Между батареей и металлической декой нужна прокладка из чего то плотного. Я использовал пластиковую папку для бумаги.
Автомат, он же выключатель самоката, обязательная часть программы. У меня он приклеен к батарее, но вы можете его расположить где хотите.
Соединяем
Тут все просто. Соединяем, смотрим что бы не где не зажимало и на притирало провода металлом.
И вот он готов.
Как самому собрать электросамокат? Об электросамокатах
Чтобы стать владельцем электросамоката, можно купить подходящую модель заводской сборки, заказать ее изготовление в специализированной мастерской или собрать самостоятельно.
Проще всего купить готовый девайс. Но если поиски желаемой модели зашли в тупик, можно сделать электрический самокат из запчастей своими руками или обратиться в мастерскую по сборке персонального электротранспорта.
5 причин собрать электросамокат самому
1. Уход от усредненных параметров. Многие электросамокаты имеют похожие характеристики, рассчитанные на большинство покупателей. Но вы можете отойти от условных стандартов и реализовать самые смелые идеи.
2. Точное соответствие имеющимся пожеланиям. Вы сами выбираете детали и решаете, какой будет конструкция вашего е-самоката, его компоненты и технические характеристики.
3. Целенаправленные вложения. Вы не платите за опции, которые вам не нужны. Вместо этого вкладываетесь в интересующие вас полезности. Например, выбираете прочную раму с высокой грузоподъемностью, мощный мотор для лучшего разгона и емкую батарею для увеличения дальности хода.
4. Уникальность. Вы можете собрать девайс, не имеющий аналогов в мире, а главное – адаптированный под ваши цели и пожелания.
5. Handmade как способ самореализации. Если вы в душе – изобретатель и мастер, который предпочитает создавать полезные устройства своими руками, вряд ли вас удовлетворит покупка обычного заводского электросамоката. В дальнейшем вы наверняка будете дорабатывать его «под себя». Хорошая альтернатива – собрать самодельный девайс, устраивающий вас по всем параметрам.
Как выбрать нужные и подходящие детали?
Перед изготовлением самоката на электротяге нужно продумать, на какой базе вы будете его собирать и какими компонентами оснастите. Ходовые качества девайса во многом будут зависеть от выбора самокатной базы. В ее состав входят рулевая стойка, дека, подвеска и колеса. Проще и удобнее всего использовать хорошую базу от обычного, неэлектрического самоката.
Сделать ее самому сложнее. Для этого обычно используют стальные трубы толщиной до 2,5 мм, листовой металл, профильные трубы, уголки, арматуру, крестовые соединения. Для получения необходимой рамной конструкции применяется сварка.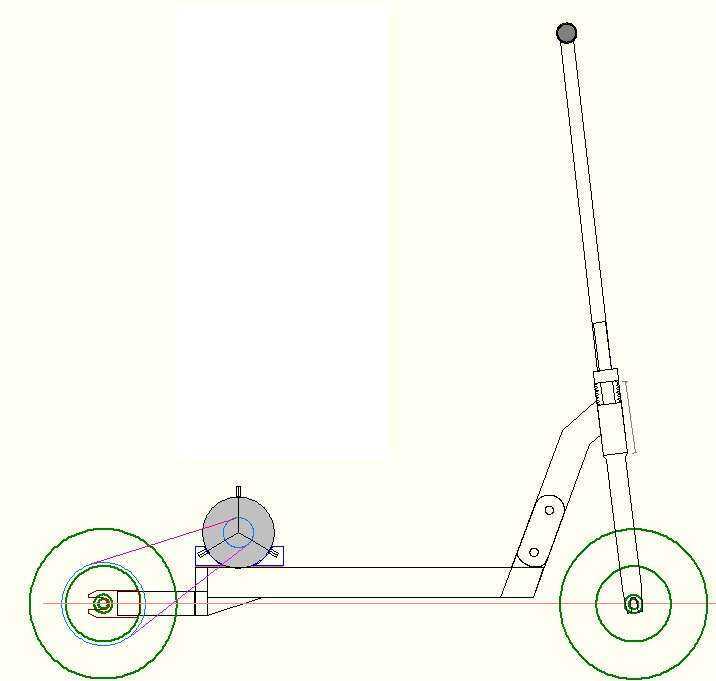 Спереди к платформе для ног приваривают стакан с вилкой, стойкой руля и колесом. Сзади обеспечивают надежное крепление второго колеса. Деку традиционно делают из фанеры. Руль можно взять от старого самоката или велосипеда.
Спереди к платформе для ног приваривают стакан с вилкой, стойкой руля и колесом. Сзади обеспечивают надежное крепление второго колеса. Деку традиционно делают из фанеры. Руль можно взять от старого самоката или велосипеда.
Рама или база
В продаже есть разные типы самокатных рам, включая модели для сборки кикбайков – велосамокатов с передним 26-дюймовым колесом и задним 20-дюймовым. Толщина колес может быть и стандартной (2,5 дюйма), и увеличенной до параметров фэтбайка – 4 дюйма. Все зависит от конфигурации выбранной рамы.
При выборе самокатной базы учитывают:
- подходящий размер колес;
- ширину дропаутов – посадочный размер для установки мотор-колеса;
- вес конструкции;
- ее грузоподъемность;
- наличие амортизаторов для мягкого хода;
- рекомендованные формы корпуса аккумуляторной батареи и наличие места для ее удобного расположения.
Колеса
Для оснащения электросамокатов используются колеса диаметром от 5–6 до 20 дюймов и более. Миниатюрные колесики компактные и легкие, но на преодоление дорожных препятствий они не рассчитаны. Им нужен идеально ровный асфальт. В реальных условиях даже по хорошим покрытиям, включая тротуарную плитку, лучше ездить на колесах диаметром 8–12 дюймов.
Миниатюрные колесики компактные и легкие, но на преодоление дорожных препятствий они не рассчитаны. Им нужен идеально ровный асфальт. В реальных условиях даже по хорошим покрытиям, включая тротуарную плитку, лучше ездить на колесах диаметром 8–12 дюймов.
Для езды по грунтовке и старому асфальту выбирайте 12–20-дюймовые колеса. Конечно, с увеличением размеров усложняется переноска и хранение девайса. Поэтому правило «чем больше – тем лучше» актуально не всегда. Здесь приходится выбирать между отличной проходимостью и компактностью, хорошей динамикой разгона и легким весом – кому что важнее.
Амортизаторы частично гасят вибрацию и толчки при езде. Но именно от размеров колес зависит величина препятствий на пути, которые вы сможете преодолевать. Любая неровность, будь то бордюр или выбоина, не должны превышать 50% диаметра колеса. Поэтому если вы любите кататься по легкому бездорожью, выбирайте колеса от 16–20”. Более компактные варианты предназначены для размеренной езды по относительно ровным поверхностям.
Двигатель
При изготовлении электросамокатов чаще всего используют мотор-колеса, реже – двигатели с цепным или ременным приводом. Популярность мотор-колесам обеспечили:
- эффективная и тихая работа;
- герметичность;
- надежность;
- доступность;
- долговечность;
- нетребовательность в уходе.
Обычно на самокаты ставят редукторные мотор-колеса. Они легкие и компактные, имеют больший крутящий момент при той же мощности, обеспечивают отличный накат и высокий КПД на небольших скоростях. При сравнительно небольшой мощности (250–500 Вт) они обеспечивают скорость до 25–40 км/ч, комфорт передвижения и уверенное преодоление подъемов.
Электромоторы прямого привода предусматривают функцию рекуперативного торможения, максимально надежны и бесшумны в работе. Но на самокаты такие двигатели ставят редко. Они более актуальны для электровелосипедов, скутеров, мопедов и мотоциклов – когда увеличение веса конструкции некритично, а мощность и скорость важнее, чем хороший накат и тяговые характеристики.
Аккумуляторная батарея
Выбирать подходящие детали и собирать самокат самому многие решают из-за возможности получить лучшие характеристики, чем у большинства заводских моделей. От параметров аккумуляторной батареи зависит, как долго вы сможете кататься на своем электросамокате на 1 заряде АКБ.
Конечно, дальность поездок зависит от рельефа местности, качества дорожного покрытия, веса райдера, силы встречного ветра и других факторов. Но при равных условиях на дальность хода влияет 2 параметра – номинальное напряжение и емкость батареи. С другой стороны, при увеличении энергоемкости батареи возрастает и ее вес.
Поэтому при выборе АКБ важно найти баланс между достаточным запасом энергии и приемлемым весом. По соотношению массы, емкости, цены и остальных параметров лучшим оснащением для самокатов и других видов персонального электротранспорта считаются Li-ion батареи.
Напряжение и емкость АКБ
Запас энергии АКБ (альтернативное название – энерговооруженность батареи) измеряется в ватт-часах (Вт·ч) и рассчитывается как произведение емкости и напряжения. Вольтаж батареи должен соответствовать напряжению мотора и в зависимости от его мощности может составлять 24, 36, 48 или даже 60 В.
Вольтаж батареи должен соответствовать напряжению мотора и в зависимости от его мощности может составлять 24, 36, 48 или даже 60 В.
Стандартные параметры, от которых можно стартовать при выборе аккумуляторной батареи для самоката, приведены в таблице.
Мощность мотора | 250 Вт | 350 Вт | 500 Вт |
Запас энергии | от 200 Вт·ч | от 300 Вт·ч | 480 Вт·ч и выше |
Емкость | 7–8 А·ч | 8–9 А·ч | от 10 А·ч |
Напряжение | 24 В | 36 В | 48 В |
Это усредненные параметры заводских электросамокатов. Расстояние пробега при таких характеристиках АКБ составляет около 30 км. Чтобы увеличить дальность хода до 50–70 км, используйте АКБ с удвоенным запасом энергии – от 500–600 Вт·ч при средней мощности мотора.
Расстояние пробега при таких характеристиках АКБ составляет около 30 км. Чтобы увеличить дальность хода до 50–70 км, используйте АКБ с удвоенным запасом энергии – от 500–600 Вт·ч при средней мощности мотора.
Место установки батареи
Аккумуляторы для е-самоката можно разместить:
1. В аккумуляторном отсеке деки. Такой вариант удобен, обеспечивает низкий центр тяжести и не усложняет управление. Но батарею важно защитить от возможных ударов и повреждений при езде.
2. На рулевой стойке, в защитном корпусе, кейсе или сумке. Такой вариант прост в исполнении, позволяет легко устанавливать и снимать АКБ. Но батарея на рулевой стойке повышает центр тяжести, мешает при езде и слабо защищена от повреждений.
3. В полости рулевой стойки. Этот способ монтажа используется редко из-за сложности реализации. Но если в стойке есть свободное пространство, можно воспользоваться им для установки компактной АКБ.
Чаще всего батарею устанавливают в полости деки, а рулевую стойку используют для крепления дополнительной АКБ.
Контроллер управления
Этот компонент соответствует названию: обеспечивает слаженную работу батареи и двигателя, регулирует крутящий момент, не допускает перегрузок в цепи, перегрева и других опасных ситуаций. Как и двигатель, контроллер влияет на резвость старта и динамику разгона, развиваемую скорость и эффективность преодоления подъемов.
Характеристики контроллера должны соответствовать параметрам электромотора:
1. Напряжение – какое у мотора, такое должно быть и у контроллера.
2. Номинальная мощность – аналогично.
3. Максимальная мощность – берется с 2-кратным запасом для прямоприводных электромоторов и с запасом в 2,5 раза для редукторных моделей. Этот запас необходим для форсирования и безопасной работы мотора на стартовых токах.
4. Максимальная сила тока – также рассчитывается с запасом на форсирование. Чтобы рассчитать номинальный ток мотора, делим его мощность на напряжение. Полученное значение умножаем на 2 для моделей прямого привода или на 2,5 для редукторных моторов. Получаем максимальный ток подходящего нам контроллера.
Получаем максимальный ток подходящего нам контроллера.
Рычаги управления
Кнопка включения/выключения питания обычно подключается на контроллер напрямую. Подойдет любая кнопка с фиксацией – ток здесь небольшой, достаточный для работы схемы управления.
Для регулировки скорости можно использовать курок газа, половинчатую или цельную ручку с 3 проводами (5 В для датчиков холла, выходной сигнал и земля) для подключения в цепь контроллера. Предпочтительным считается курок газа, т.к. в экстремальной ситуации райдер не станет его удерживать, в отличие от ручки.
Для управления тормозами используют ручки со встроенными концевиками. При нажатии тормоза они отключают двигатель и включают режим рекуперации энергии, если он активирован контроллером.
Варианты сборки
После выбора и приобретения всех необходимых узлов и деталей их необходимо соединить в единую систему. В интернет-магазине VoltBikes комплектующие поставляются с инструкциями по установке. Способ сборки зависит от выбранных компонентов и конструкторских идей.
Например, АКБ можно разделить на 2 пака, чтобы разместить в пространстве деки и на рулевой стойке. Для защиты батареи часто используют пластину алюкобонда толщиной 4 мм. Контроллер обычно крепят под рулевой стойкой, чтобы обеспечить ему удобное расположение и эффективный обдув. Проводку, идущую к батарее и мотору, можно скрыть в трубах рамы.
В предыдущей статье мы привели сравнение характеристик квадроциклов и багги.
Собери электрический скутер своими руками
» Перейти к дополнительным функциям
С появлением электрических скейтбордов и самокатов, которые заполонили практически каждый город, я начал думать, что, возможно, стоит приобрести что-нибудь для себя. В настоящее время очень доступно купить скутер, такой как версия Xiaomi Mi, примерно за 400 долларов, а также множество стартапов с потрясающим дизайном. Вместо этого я решил, что попытаюсь создать свой собственный с нуля. Не столько для того, чтобы сэкономить деньги, сколько для того, чтобы получить опыт создания чего-то своего.
Вместо этого я решил, что попытаюсь создать свой собственный с нуля. Не столько для того, чтобы сэкономить деньги, сколько для того, чтобы получить опыт создания чего-то своего.
РИСУНОК 1. Самокат в сборе.
Этот проект начался в начале лета 2019 года, когда у меня появилась идея, и продолжался шесть месяцев, когда я закончил всю электронику и код. Хотя это был очень трудоемкий проект, мне нравилась каждая секунда процесса, и я с удовольствием показывал людям этот проект. Все, что мне сейчас нужно, это шлем!
Основная цель этой статьи — показать мой дизайн и производственный процесс, чтобы вы могли узнать из того, что я создал. Я постарался предоставить как можно больше информации о моем дизайне в максимально сжатой форме.
Физическая конструкция
Создание электрического скутера начинается с двух ключевых компонентов: рамы скутера и двигателя. Существует два основных типа моторных приводов для самокатов: ременный/редукторный привод или прямой привод, например мотор-втулка. Я выбрал бесщеточный ступичный двигатель, который был разработан для использования на стандартном ховерборде. Основная причина, по которой я выбрал этот двигатель, заключается в его непревзойденном соотношении мощности и стоимости. Поскольку ховерборды производились массово, стоимость двигателя была на порядки меньше, чем я мог найти где угодно.
Я выбрал бесщеточный ступичный двигатель, который был разработан для использования на стандартном ховерборде. Основная причина, по которой я выбрал этот двигатель, заключается в его непревзойденном соотношении мощности и стоимости. Поскольку ховерборды производились массово, стоимость двигателя была на порядки меньше, чем я мог найти где угодно.
Кроме того, было относительно просто сконструировать крепление, которое могло бы удерживать двигатель на поворотной оси. Я хотел, чтобы двигатель был впереди, чтобы задний дисковый тормоз с ручным управлением работал. Этот ручной тормоз чрезвычайно важен для электрического скутера в районе с большими холмами и опасным движением.
Самой большой механической проблемой, которую необходимо было решить, была конструкция колесной арки. Поскольку я решил использовать двигатель-втулку, крепление двигателя должно было выдерживать вес пользователя в дополнение к крутящему моменту двигателя, ускоряющегося и вращающегося. При покупке скутер имел слабое колесо в сборе, которое было нелегко модифицировать для поддержки моторизованного колеса. На рис. 2 показано, как колесо в сборе вырезается из шестигранного профиля.
На рис. 2 показано, как колесо в сборе вырезается из шестигранного профиля.
РИСУНОК 2. Колесо OEM , разрезаемое ленточной пилой.
Затем я использовал большой кусок алюминия и спроектировал раму, на которой держится двигатель. Он зажимается четырьмя крепежными болтами и небольшим штоком со сквозными отверстиями. Я использовал Autodesk Inventor для создания детали (которая включена в файлы для загрузки).
Эта конструкция состоит из двух частей: основной Г-образной части, которая соединяет привод руля с двигателем, и другой части, которая крепит двигатель к основанию четырьмя болтами 10-32. Я смог использовать CAM в Fusion 360 и станок с ЧПУ, чтобы сделать основную деталь, с дополнительным ручным фрезерованием и нарезанием резьбы для окончательной обработки.
Наконец, я использовал ручную фрезу, чтобы вырезать базовый зажим и добавил сквозные отверстия для болтов. На рисунках 3-6 показана CAD-модель узла колеса в дополнение к процессу сборки колеса. В основании скутера есть две направляющие, поддерживающие вес водителя, которые я также использовал для надежного удержания двух аккумуляторов LiPo. Так как батареи LiPo очень нестабильны и подвержены как повреждению водой, так и проколу, я добавил металлическую крышку, чтобы защитить батареи от каждого из этих факторов.
В основании скутера есть две направляющие, поддерживающие вес водителя, которые я также использовал для надежного удержания двух аккумуляторов LiPo. Так как батареи LiPo очень нестабильны и подвержены как повреждению водой, так и проколу, я добавил металлическую крышку, чтобы защитить батареи от каждого из этих факторов.
РИСУНОК 3. CAD сборки колеса с ЧПУ.
РИСУНОК 4. Готовый узел колеса с ЧПУ с присоединенным шестигранником.
РИСУНОК 5. Крупный план крепления двигателя.
РИСУНОК 6. Окончательная сборка переднего колеса.
Для этого я отрезал кусок алюминия толщиной 1/16 дюйма и согнул его по длине с помощью гибочного станка и ацетиленовой горелки, чтобы уменьшить нагрузку на металл при гибке. При нормальном использовании дно может поцарапаться (см.0012 Рисунок 7 ), но металлическая крышка пока без проблем принимает на себя все повреждения.
РИСУНОК 7. Крупный план металлического каркаса, защищающего батареи.
Я широко использовал 3D-печать как на стадии прототипа, так и в конечном продукте. Наиболее очевидной частью является электрическая коробка, с помощью которой пользователь может легко заряжать аккумуляторы LiPo. В этом блоке есть главный выключатель питания, делитель напряжения для Arduino для считывания напряжения батареи (поскольку максимальное аналоговое напряжение составляет 5 В, а контроллер работает от 12 В LiPo) и разъемы для зарядки LiPo.
Чтобы зарядить этот скутер, пользователь снимает переднюю панель (прикрепленную винтами M3), отсоединяет разъемы XT-60 от основного питания и просто подключает их к зарядному устройству LiPo. Кроме того, корпус ЖК-экрана, корпус Arduino Nano, механизм складывания и гидроизоляционные элементы разработаны и напечатаны для этого самоката на 3D-принтере. Все файлы САПР доступны для загрузки для использования в вашем собственном скутере.
На рис. 8 выделена электрическая коробка и контроллер, подключенные к раме скутера. Чтобы прикрепить контроллер, я просверлил и нарезал два отверстия в раме и прикрутил контроллер двумя болтами 10-32. Электрическая коробка была соединена с помощью одного болта и стяжки.
РИСУНОК 8. CAD рамы скутера с контроллером и электрической коробкой.
Этот метод крепления работает очень хорошо, обе коробки надежно закреплены. Я не хотел слишком сильно уменьшать прочность самоката, поэтому я выбрал как можно меньше отверстий в самокате.
Позже в сборке я заметил, что ездить на скутере может быть очень неудобно, так как обе мои ноги не могут удобно разместиться на маленькой платформе. Вероятно, это связано с тем, что инженеры спроектировали самокат таким образом, чтобы пользователь ставил одну ногу на раму, а другой толкал самокат вперед. Чтобы исправить это, я знал, что у меня есть два варианта: добавить металлическую пластину сверху или отрезать основную раму и приварить новую.
К сожалению, у меня не было доступа к сварочному аппарату, поэтому пришлось использовать первый вариант. Мне удалось найти четвертьдюймовую алюминиевую пластину, которая была достаточно большой, чтобы покрыть платформу. Я использовал ленточнопильный станок и шлифовальный станок, чтобы отрезать пластину по длине, а также добавил прорезь для механизма складывания, как показано на рис. 9 .
РИСУНОК 9. Самокат с дополнительной платформой для стояния.
Последней серьезной модификацией этого самоката стал руль. Рули, которые поставлялись со скутером, были так близко друг к другу, что им было очень неустойчиво и трудно управлять, особенно на высокой скорости. Чтобы исправить это, я купил алюминиевую ложу диаметром один дюйм и использовал токарный станок, чтобы уменьшить диаметр, пока она не вошла в раму.
Наконец, я просверлил и нарезал два отверстия для крепежных винтов 10-32, чтобы закрепить новый стержень на исходной раме. С более длинным рулем на скутере было намного удобнее ездить, и он чувствовал себя более устойчивым на поворотах.
С более длинным рулем на скутере было намного удобнее ездить, и он чувствовал себя более устойчивым на поворотах.
Одной из ключевых тем, которые я преследовал во всех разработанных мной компонентах, было обеспечение водонепроницаемости всей системы. Хотя было бы неразумно ездить на нем в сильный дождь, вся основная электроника должна быть водонепроницаемой. Основная проблема с водой — это аккумуляторы, которые находятся под скутером.
Чтобы заключить аккумуляторы, как упоминалось ранее, я согнул алюминиевый лист для защиты ходовой части, а также распечатал на 3D-принтере детали с прорезями для кабельных вводов и защитой проводов, чтобы позволить проводам проходить сквозь них. Есть три различных слота для прохождения кабеля, как показано на Рис. 10 : основной источник питания; управление батареями LiPo; и датчики температуры аккумулятора. Эти пазы снабжены нейлоновыми кабельными вводами, которые водонепроницаемы и очень просты в использовании.
РИСУНОК 10. Фотография готовой ходовой части скутера.
Фотография готовой ходовой части скутера.
Наконец, я использовал Dynaflex 230 для полной гидроизоляции батарей, которые видны по краям на Рисунок 10 . Затем эти провода проходят к основной электрической коробке, в которой используются те же кабельные сальники, что и в электрической коробке, и они герметизируются с помощью термоусадочной трубки. Наконец, каждое проводное соединение имеет больше кремния в каждом соединении, чтобы гарантировать отсутствие утечек.
Электрические компоненты
После того, как я выбрал колесо для ховерборда в качестве двигателя, я выбрал контроллер Рисунок 11 , потому что он работал с моим бесколлекторным двигателем и был очень недорогим. Батареи было немного сложнее подобрать.
РИСУНОК 11. Крупный план контроллера, установленного на самокате.
Поскольку почти во всех скутерах и велосипедах используются литий-ионные аккумуляторы, я подумал, что они будут лучшим вариантом для меня. Причина, по которой они так широко используются, заключается в их превосходной емкости хранения, зарядных характеристиках, и они могут быть разработаны практически для любого форм-фактора.
Причина, по которой они так широко используются, заключается в их превосходной емкости хранения, зарядных характеристиках, и они могут быть разработаны практически для любого форм-фактора.
Хотя я тщательно изучил конструкцию рюкзака для моего скутера, я понял, что у меня нет средств на покупку аппарата для точечной сварки, который используется при сборке этих рюкзаков. В будущем я был бы заинтересован в создании другого скутера или аналогичного проекта, в котором я использую батареи 18650 вместо стандартных батарей LiPo, используемых в этой сборке.
Чтобы найти допустимые размеры для моих аккумуляторов, я провел ряд измерений с помощью штангенциркуля и сделал очень простую модель с помощью Autodesk Inventor, как показано на рисунке 9.0012 Рисунок 12 . Имея в руках эти размеры, я смог подобрать аккумуляторы, чтобы они подходили под основную раму скутера.
РИСУНОК 12. Простая САПР скутера с аккумулятором (оранжевый).
У меня было 43 мм для ширины батарей, с немного большим пространством, чтобы батареи поместились, не ударяясь о землю. Выбранные батареи были 6S и имели время автономной работы 4000 мАч, что немного меньше, чем я надеялся.
Выбранные батареи были 6S и имели время автономной работы 4000 мАч, что немного меньше, чем я надеялся.
В целом, основная электрическая схема этого скутера была довольно проста в разработке. Как показано на рис. 13 , у меня есть две батареи LiPo, соединенные последовательно, которые питают контроллер и двигатель. Контроллер считывает показания потенциометра дроссельной заслонки, установленного на руле, для установки скорости двигателя. Кроме того, я добавил кнопку круиз-контроля, также установленную на руле рядом с тормозом. Двигатель управляется трехфазным питанием с тремя датчиками Холла, которые все выводят на контроллер.
РИСУНОК 13. Схема силового привода скутера.
Теперь, когда у меня была основная конструкция скутера, казалось, что его очень легко подключить и ездить. Этого, к сожалению, не было. Подключить батареи и датчики температуры оказалось на удивление сложно, чтобы разместить их в отведенном мне пространстве.
К этому моменту в процессе сборки я завершил проектирование ходовой части и электрической коробки, которая была установлена, как вы можете видеть в окончательном проекте еще в Рисунок 1 . Я начал с размещения своих датчиков температуры с лишним кабелем через сальниковые соединения в основании, в дополнение к зарядным кабелям LiPo (всего 26 кабелей).
Наконец, я взял два разъема XT-60 и проложил кабели к блоку управления. Эту процедуру подключения можно увидеть на рис. 14 , на котором показана первоначальная прокладка кабеля в секцию батареи.
РИСУНОК 14. Подключение аккумуляторов к основанию рамы.
Затем я поместил литий-полимерные батареи в раму, которая плотно прилегает, и начал подсоединять различные разъемы. После значительных проблем с размещением батарей и разъемов в отведенной комнате я понял, что мне нужно что-то изменить, чтобы все поместилось, не оказывая значительного давления на кабели.
Я заметил, что разъемы XT-60 занимают много места, поэтому решил их убрать и сделать прямые паяные соединения. Я бы не рекомендовал удалять разъемы, но их было проще удалить, чем переделывать корпус.
Я отсоединял каждый из разъемов по одному кабелю за раз, стараясь не допустить короткого замыкания. Я использовал обширную термоусадочную трубку и изоленту, чтобы убедиться, что они хорошо изолированы. Как показано на рис. 15 , вся проводка на основании была проложена и приклеена к термоусадочной трубке.
РИСУНОК 15. Последний блок батарей перед термоусадочной пленкой.
Затем я поместил обмотанную лентой систему в термоусадочную трубку и медленно усадил всю систему, пока она не стала похожа на 9.0012 Рисунок 16 . После этого я в последний раз надел металлический лист и затянул все болты локтайтом, чтобы сделать их постоянными.
РИСУНОК 16. Термоусадочные батареи.
Как кратко обсуждалось ранее, я разработал электрическую коробку, которая находится рядом с контроллером двигателя. Схема этого простого блока показана на рис. 17 .
РИСУНОК 17. Схема электрической коробки .
Чтобы зарядить каждую из батарей, я просто вынимаю вилки из блока управления и подключаю их к балансировочному зарядному устройству вместе с соответствующими балансировочными кабелями. Как упоминалось ранее, я хотел бы использовать литий-ионный аккумулятор, который сделал бы процесс зарядки намного проще и плавнее. Поскольку у меня было только одно зарядное устройство, мне пришлось заряжать каждую батарею отдельно.
При использовании скутера я подключаю разъемы аккумулятора к розеткам, которые соединяют аккумуляторы последовательно. В моей первой конструкции у меня был стандартный кулисный переключатель, который был рассчитан на 10 А при 125 В переменного тока, что было значительно ниже моего энергопотребления (около 250 Вт против 125 Вт). Эти переключатели на самом деле предназначены только для переключения переменного тока, что намного проще сделать.
Эти переключатели на самом деле предназначены только для переключения переменного тока, что намного проще сделать.
К сожалению, за несколько дней использования переключатель полностью сгорел. После долгих исследований я обнаружил, что любой переключатель постоянного тока будет слишком большим, чтобы поместиться внутри или рядом с блоком управления. Вместо этого я выбрал импровизированный переключатель с закороченным гнездовым разъемом XT-60, который использовался для замыкания или размыкания цепи. Хотя это, безусловно, не самый чистый вариант переключения, он очень функционален и до сих пор не вызывал проблем.
Оттуда я подключил контроллер к электрической коробке и двигателю, оставив достаточно свободного места для вращения колеса. На этом движение скутера было завершено. Пришло время спроектировать ЖК-экран и сопутствующие датчики. Функциональность, которую я искал на своем ЖК-экране, заключалась в том, чтобы показывать напряжение батареи, приблизительный процент оставшегося заряда батареи, скорость и пройденные мили. Самым сложным из них было заставить работать измерение скорости.
Самым сложным из них было заставить работать измерение скорости.
Для этого я подумал о подключении датчиков Холла, которые использует контроллер, но я беспокоился, что это может помешать основному управлению. Вместо этого я решил использовать показания датчика Холла, когда неодимовый магнит, подключенный к колесу, проходил мимо датчика. Одна проблема с этой конструкцией заключается в том, насколько близко открытая электроника находилась к колесу, из-за чего вода могла разбрызгиваться.
Я разработал простую форму, в которую поместил электронику и эпоксидную смолу под названием Dragon Skin 20, как показано на рисунке 9.0012 Рисунок 18 .
РИСУНОК 18. Водонепроницаемый датчик Холла.
Я оставил эпоксидную смолу на модуле синего цвета, что позволяет мне настроить чувствительность датчика. На рис. 19 показан корпус экрана, предназначенный для размещения ЖК-экрана 20×4 символов и соединяющийся с рулем с помощью винтов.
РИСУНОК 19. Модель CAD корпуса ЖК-экрана.
Кроме того, я сделал простую коробку для Arduino Nano и связанной с ней проводки ( Рисунок 20 ). И в корпусе корпуса, и в корпусе экрана использовалось стандартное оборудование M3, включая нагревательные вставки, которые вплавлялись в детали с помощью паяльника.
РИСУНОК 20. CAD небольшого электрического блока для Arduino Nano.
Наконец, я припаял все коннекторы к Nano и разместил микроконтроллер на небольшой макетной плате. Затем я добавил гнездовые разъемы вокруг Arduino с шестью разъемами питания и шестью разъемами заземления сбоку. Рисунок 21 показывает коробку-прототип, которую подключают для испытаний.
РИСУНОК 21. Прототип коробки Arduino Nano.
Я использовал обжимные соединения для подключения каждого устройства к макетной плате на случай, если в будущем возникнут проблемы с проводкой. Чтобы измерить напряжение батареи, я добавил делитель напряжения в электрическую коробку с резисторами 47 кОм и 4,7 кОм последовательно с Arduino, подключенным к резистору 4,7 кОм. Назначение делителя связано с тем, что Arduino работает от 5 В и, таким образом, может измерять максимум 5 В. Схема делит напряжение батареи почти точно на 10, что делает его читаемым для Arduino. Схема Nano показана на Рисунок 22 .
Чтобы измерить напряжение батареи, я добавил делитель напряжения в электрическую коробку с резисторами 47 кОм и 4,7 кОм последовательно с Arduino, подключенным к резистору 4,7 кОм. Назначение делителя связано с тем, что Arduino работает от 5 В и, таким образом, может измерять максимум 5 В. Схема делит напряжение батареи почти точно на 10, что делает его читаемым для Arduino. Схема Nano показана на Рисунок 22 .
РИСУНОК 22. Общая схема Arduino, датчиков и ЖК-экрана.
Программирование
Код для Arduino включен в файлы для загрузки. Я продолжу и объясню методы, которые я использовал при программировании этой системы. Самой сложной частью этой программы было заставить одометр и спидометр датчика Холла работать правильно с ограниченной тактовой частотой. Чтобы прочитать датчик Холла, я подключил выход ко второму цифровому выводу, который может запускать аппаратные прерывания.
При каждом переднем фронте сигнала датчика Холла запускается прерывание и выполняется простая функция, показанная на рис. 23 .
23 .
РИСУНОК 23. Функция увеличения аппаратного прерывания.
Эта функция увеличивает счетчик, который хранится в электрически стираемой программируемой постоянной памяти (ЭСППЗУ). EEPROM — это энергонезависимая память, что означает, что она стабильна, когда устройство не запитано. Доступ к этой памяти не так прост, как определение переменной в памяти; вам нужно отправить байт данных на определенный адрес памяти. К сожалению, поскольку Arduino использует восьмибитную архитектуру, система не сможет хранить показания одометра по одному адресу памяти. Чтобы решить эту проблему, я создал несколько базовых вспомогательных функций, которые записывают и считывают «длинную» переменную по четырем восьмибитным адресам памяти, как показано на рис.0012 Рисунок 24 .
РИСУНОК 24. Вспомогательная функция для записи в EEPROM.
Чтобы прочитать значение из памяти, я использовал оператор сдвига битов после чтения четырех байтов из памяти, как показано на рисунке .
РИСУНОК 25. Метод побитового преобразования 4x восьмибитного целого числа в «длинную» переменную.
Часть этой программы, связанная со спидометром, запущена с TimerOne , 16-разрядного таймера, работающего на частоте 16 МГц. Я устанавливаю период таймера, чтобы запускать событие каждую четверть секунды, чтобы считать показания одометра, сравнить их с предыдущими показаниями, а затем рассчитать скорость.
Программа вычисляет скорость путем преобразования изменения числа оборотов в расстояние. Я сделал массив из четырех самых последних скоростей и вывел среднее значение, чтобы сгладить данные для ЖК-экрана.
Датчики температуры было очень легко настроить с помощью технического описания и базового аналогового считывателя , как показано на рис. 26 .
РИСУНОК 26. Показания температуры батареи.
Кроме того, я считываю напряжение батареи очень похожим методом, но умножаю на 10 из-за схемы делителя напряжения. См. Рисунок 27 .
См. Рисунок 27 .
РИСУНОК 27. Показание напряжения LiPo.
Окончательная настройка заключалась в объединении всего этого в одну программу и интеграции ее с ЖК-дисплеем.
Использование этого ЖК-экрана очень просто благодаря прилагаемым библиотекам. Мне пришлось провести несколько тестов на ЖК-дисплее, чтобы убедиться, что расположение пробега, скорости, температуры и напряжения не перекрываются и выглядят хорошо, как показано на рис. 28 .
РИСУНОК 28. Рабочий ЖК-экран.
Заключение
В целом, этот проект был очень познавательным. Было интересно спроектировать весь блок, от механических компонентов до используемого аппаратного и программного обеспечения. Конечный продукт обладает удивительной силой; он может поднять меня с рюкзаком на любой холм, который может предложить Итака, штат Нью-Йорк. Меня порадовала и впечатлила мощность мотора-втулки.
Кроме того, ЖК-экран очень точно и быстро реагирует на измерения скорости и одометра. Хотя мне не удалось проверить запас хода на ровной дороге, я оцениваю его примерно в 6-8 миль без подзарядки, основываясь на предыдущих поездках. Это ниже, чем у многих скутеров на рынке, но я работал с очень ограниченным пространством под скутером и батареями LiPo.
Я бы порекомендовал построить что-то подобное всем, у кого есть время. Я записал большую часть времени, которое я потратил на это, и в общей сложности около 100 часов!
В идеальном мире я бы приварил новую раму к существующему самокату. Это дало бы мне дополнительное пространство, чтобы удобно стоять и разместить всю электронику в большем пространстве.
В будущем я хотел бы немного поэкспериментировать с созданием литий-ионного аккумулятора для питания скутера. Мне очень понравилось работать над этим проектом, и я многому научился. Надеюсь, я вдохновил некоторых из вас на создание собственного! NV
Список деталей
Детали я покупал в разных местах.
Amazon:
- Скутер
- Кабельные вводы
Универсальные детали со склада в Китае:
- Датчик Холла
- Ардуино Нано
- Проводка 12 калибра
eBay:
- Дроссельная заслонка с потенциометром
- 8-дюймовый бесщеточный мотор-втулка для ховерборда 904:00
В Community Maker Space в Корнелле:
- Все остальные детали
- Датчик температуры
- Проводка
- Пайка
- Расходные материалы для 3D-печати
Загрузки
202002-Daniel.zip
Что в архиве?
Код и файлы САПР
Как построить более быстрый электрический скутер, который не убьет вас
Электрические скутеры могут быть удобным и недорогим способом передвижения. Из коробки большинство из них довольно медленные и прохладные в производительности. Обычно их строят для безопасного и простого транспорта, а не для шуток и дурачества. Тем не менее, ничто не мешает вам построить мощный электрический скутер; часто требуется всего несколько простых модов, чтобы перейти от мягкого к дикому.
Тем не менее, ничто не мешает вам построить мощный электрический скутер; часто требуется всего несколько простых модов, чтобы перейти от мягкого к дикому.
Я занимаюсь сборкой и модификацией электрических скутеров уже более десяти лет, попутно плавя колеса и сжигая двигатели. Сегодня я научу вас основам устройства современного электрического самоката и тому, как сделать его быстрее — намного быстрее. Затем вы можете снимать эпические монтажи, мчась на высокой скорости. Это потрясающе весело.
Но прежде чем мы начнем возиться, прислушайтесь к этому предупреждению: самокаты поставляются с завода, рассчитанными на определенные скорости из соображений безопасности, а увеличение мощности самоката также увеличивает риск опасности и травм, как при сборке, так и при езде на нем, поэтому будьте предельно внимательны к этому. В конце концов, вы работаете с батареями и электричеством.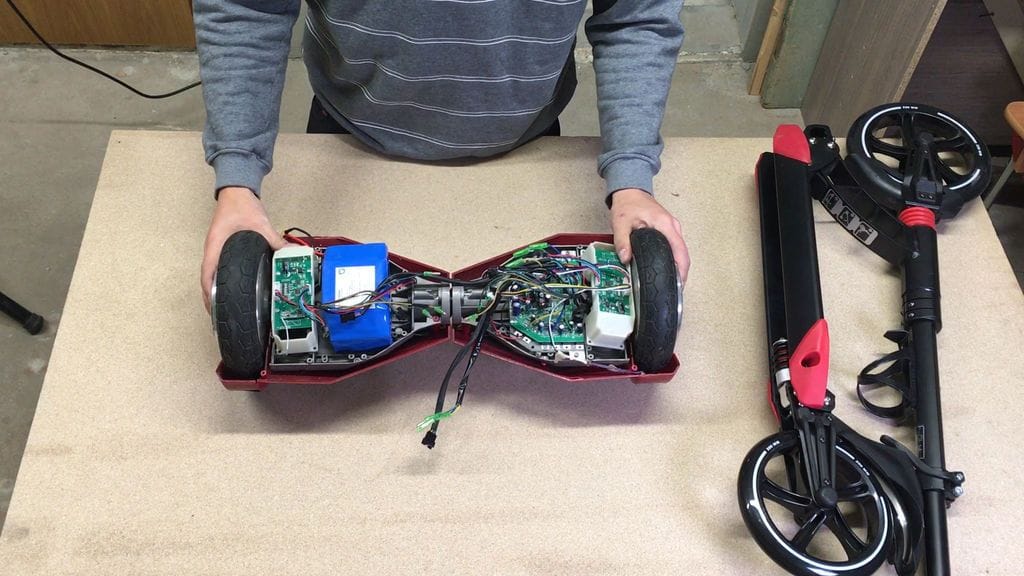 Всегда носите подходящее защитное снаряжение, соблюдайте местные правила дорожного движения и помните о благополучии других.
Всегда носите подходящее защитное снаряжение, соблюдайте местные правила дорожного движения и помните о благополучии других.
Прочитайте этот абзац еще раз. Усвойте это. Понятно? Хороший.
Больше мощности — больше удовольствия. YouTube/What Up TK Here
Основы трансмиссии электрического скутера
Прежде чем мы приступим к разборке чего-либо, полезно знать, что именно приводит в движение электрический скутер.
По своей сути трансмиссия электрического скутера очень проста и состоит из четырех основных компонентов. Есть двигатель для привода колеса и аккумулятор, который обеспечивает питание. Также есть электронный регулятор скорости (ESC), который изменяет поток энергии от аккумулятора к двигателю, чтобы контролировать его скорость, и своего рода дроссель для отправки команд на регулятор скорости.
Регулятор скорости — это то, что дает вам возможность управлять дроссельной заслонкой скутера. Чем больше мощности передается двигателю, тем быстрее вы едете. Регуляторы скорости
Чем больше мощности передается двигателю, тем быстрее вы едете. Регуляторы скорости
обычно выглядят примерно так, но бывают разных форм и размеров. В этом случае радиатор является частью внешнего корпуса и помогает охлаждать транзисторы внутри. YouTube/What Up TK Here
Конечно, некоторые самокаты становятся более причудливыми. У некоторых будет собственный контроллер скорости, который также управляет дисплеем приборной панели, отображая информацию об уровне заряда батареи и скорости. У других будет специальный двухскоростной контроллер, способный управлять двумя двигателями, одним передним и одним задним. Тем не менее, большинство скутеров обходятся тем, что управляют одним или другим. Дешевые модели ступичных двигателей могут приводить в движение только переднее колесо, в то время как более дорогие скутеры имеют тенденцию приводить в движение заднее колесо или оба.
Сами моторы тоже бывают разных видов. Коллекторные двигатели постоянного тока старой школы обычно не встречаются за пределами игрушечных самокатов, таких как Razor. В наши дни бесщеточные двигатели гораздо более популярны из-за их большей эффективности, хотя для их привода требуются более сложные регуляторы скорости. Втулочные двигатели, которые полностью помещаются в само колесо, являются популярной формой бесщеточного двигателя. Обычно они используются в современных электрических скутерах, поскольку позволяют производителям создавать полноприводные модели.
В наши дни бесщеточные двигатели гораздо более популярны из-за их большей эффективности, хотя для их привода требуются более сложные регуляторы скорости. Втулочные двигатели, которые полностью помещаются в само колесо, являются популярной формой бесщеточного двигателя. Обычно они используются в современных электрических скутерах, поскольку позволяют производителям создавать полноприводные модели.
Коллекторные двигатели, подобные этому большому агрегату, показанному здесь, сейчас являются устаревшей технологией. Бесщеточные двигатели обладают большей мощностью в меньшем корпусе и в наши дни являются более типичным выбором для повышения производительности. YouTube/What Up TK Here
Что касается батарей, то в подавляющем большинстве скутеров используются литий-ионные элементы, подобные тем, которые используются в современных электромобилях. Существуют и другие аккумуляторные технологии, но большинство из них тяжелее и хранят меньше энергии, что делает скутер невероятно медленным и тяжелым, на котором далеко не уедешь. Если у вас есть скутер, который работает от тяжелых свинцово-кислотных аккумуляторов, часто обновление литий-ионного аккумулятора является отличным модом.
Если у вас есть скутер, который работает от тяжелых свинцово-кислотных аккумуляторов, часто обновление литий-ионного аккумулятора является отличным модом.
Большинство скутеров поставляются с довольно слабой мощностью в стандартной комплектации. Многие страны ограничивают максимальную выходную мощность электрических скутеров и других подобных транспортных средств до 200 Вт, что соответствует ничтожным 0,26 лошадиным силам. Обычно это хорошо для максимальной скорости 15 миль в час. Самокаты для детей часто имеют еще меньшую мощность. Литиевые батареи
— ключ к созданию высокопроизводительного скутера. Раньше я использовал пакеты для радиоуправляемых самолетов, но в наши дни пакеты для электронных велосипедов легко доступны в Интернете. YouTube/What Up TK Здесь
Вы можете легко построить или модифицировать скутер, чтобы он был намного мощнее. Однако будьте осторожны: во многих юрисдикциях часто запрещено ездить на более мощных скутерах по общественным улицам — в целях безопасности как водителей, так и всех остальных. Имейте это в виду, прежде чем сходить с ума по созданию мощного монстра.
Имейте это в виду, прежде чем сходить с ума по созданию мощного монстра.
Ехать быстрее с тем, что у вас есть
Итак, теперь, когда вы понимаете основные элементы самоката, вы хотите знать, как сделать его быстрее.
Самый простой способ — работать с тем, что у вас есть, чтобы получить максимальную производительность от стандартных компонентов. Есть несколько способов сделать это, и, как правило, это самый дешевый способ повысить производительность.
Однако несколько моментов предостережения: есть также более низкий потолок того, чего вы можете достичь, если выберете этот путь. Вы также рискуете взорвать то, что у вас есть. Он ничем не отличается от автомобильного мира. Да, вы можете поставить турбину размером с обеденную тарелку на Chevy Sonic вашей мамы, но вы снесете голову задолго до того, как доберетесь до 1000 л.с. на передних колесах.
Кроме того, некоторые скутеры поставляются с установленными на заводе ограничениями скорости. Их часто можно поднять или удалить с помощью обновления прошивки. Тем не менее, прошивка скутера другой прошивкой может привести к тому, что устройство перестанет работать. (Кроме того, прирост скорости за счет перепрошивки, как правило, весьма незначителен. Производители не оставляют в запасе значительного прироста производительности.)
Их часто можно поднять или удалить с помощью обновления прошивки. Тем не менее, прошивка скутера другой прошивкой может привести к тому, что устройство перестанет работать. (Кроме того, прирост скорости за счет перепрошивки, как правило, весьма незначителен. Производители не оставляют в запасе значительного прироста производительности.)
Увеличение текущего
может быть так же просто, как возиться со встроенным ограничением тока. Не вдаваясь в физику, стоящую за всем этим, скажем, что больший ток означает большую мощность, так что ограничение по току — это то, что ограничивает ваше удовольствие.
Как правило, ESC содержит так называемый «токовый шунт». Это толстый кусок провода известного сопротивления, и весь ток, идущий к двигателю, проходит через него. ESC использует это для измерения количества тока, подаваемого на двигатель, и отключает питание двигателя сверх заданного предела, чтобы защитить его и аккумулятор от повреждения.
Но если ты повстанец, тебе наплевать на отсутствие повреждений! Вы можете обмануть самокат, добавив металл на токовый шунт, что уменьшит его сопротивление. Обычно это делается путем припайки дополнительного провода параллельно токовому шунту, тем самым утолщая его. Это снижает сопротивление и нарушает калибровку. Это заставляет ESC думать, что течет меньший ток, поэтому он не запускает условие ограничения.
Этот мод может увеличить ускорение, а иногда и максимальную скорость. Просто учтите, что вы рискуете поджечь свой ESC, аккумуляторы или двигатель, если они не справятся с этим.
Токовый шунт на регуляторе скорости выглядит следующим образом: толстая проволока, обозначенная концом отвертки (первое изображение). Припайка дополнительного провода к токовому шунту снижает его сопротивление, что вводит регулятор скорости в заблуждение, заставляя его думать, что ток меньше. Это может обойти текущие ограничения и дать вам больше мощности, но также рискует взорвать ваш ESC. YouTube/What Up TK Здесь
YouTube/What Up TK Здесь
Как узнать, выдержат ли ваши запчасти такую нагрузку? Ну, так же, как тюнеры двигателей работают над автомобилем, вы попробуете и увидите. В конце концов, вы будете давить на него так сильно, что он сломается, и вы получите лучшее представление о том, на что способны эти стандартные детали, прежде чем они лопнут.
Делайте это снаружи и подальше от людей и вещей на случай, если все это загорится, и будьте осторожны, когда вы едете. Неисправные щеточные регуляторы скорости могут вызвать короткое замыкание, подавая на двигатель полный заряд батареи и отправляя вас мчаться по дороге на максимальной скорости. В качестве альтернативы, бесщеточные контроллеры могут заставить двигатель резко остановиться или внезапно дернуться, когда они выходят из строя, швыряя вас в кусты, машину или незадачливого пешехода.
Я проехал около четырех миль от этого стандартного двигателя Razor E300, когда я толкнул его слишком сильно. Сгорел довольно сильно. YouTube/What Up TK Здесь
YouTube/What Up TK Здесь
Как я уже говорил выше, это опасное дело. Сборка модифицированного скутера сопряжена с риском, поэтому нужно быть осторожным. Носите защитное снаряжение и катайтесь только там, где это безопасно. Кроме того, если вы новичок в работе с электричеством, проведите исследование и получите совет от того, кто знает, что безопасно.
Мод «Перенапряжение»
Идя дальше, вы можете сделать мод «Перенапряжение». Подача большего напряжения через двигатель дает большую максимальную скорость и, как правило, увеличивает ускорение по всем направлениям. Обычно это достигается путем замены аккумулятора скутера на аккумулятор с более высоким напряжением. Или, в самом быстром и грязном варианте, просто включить вторую батарею последовательно с первой, чтобы удвоить напряжение.
Выигрыш от перенапряжения нелинейный, но может быть чертовски близким. С помощью этого хака вы можете легко увеличить максимальную скорость своего скутера на 50 и более процентов, но за это приходится платить. Компоненты в ESC вашего скутера рассчитаны только на такое большое напряжение и могут легко выйти из строя при перенапряжении. Чем больше вы увеличиваете напряжение по сравнению со штатным, тем больше вероятность того, что это произойдет, и тем быстрее это может произойти. Сам двигатель также может выйти из строя из-за избыточного нагрева изоляции обмоток внутри.
С помощью этого хака вы можете легко увеличить максимальную скорость своего скутера на 50 и более процентов, но за это приходится платить. Компоненты в ESC вашего скутера рассчитаны только на такое большое напряжение и могут легко выйти из строя при перенапряжении. Чем больше вы увеличиваете напряжение по сравнению со штатным, тем больше вероятность того, что это произойдет, и тем быстрее это может произойти. Сам двигатель также может выйти из строя из-за избыточного нагрева изоляции обмоток внутри.
Раньше я использовал аккумуляторы для электроинструментов Ryobi для модов перенапряжения. Тем не менее, как правило, стоит использовать подходящую упаковку, предназначенную для использования на электровелосипеде или скутере. Просто проще подключить. YouTube/What Up TK Here
В любом случае сбои из-за перенапряжения обычно приводят к возникновению дыма и/или пламени. Вы также рискуете, что двигатель неожиданно ускорится или внезапно остановится, пока вы находитесь на скутере, что может привести к травмам. На самом деле, многие скутеры имеют защиту от сбоев в своих ESC, которая отключает их при обнаружении состояния перенапряжения. Хитрые мастера могут обойти это, но сделать это может быть сложно, и, как правило, детали в любом случае не рассчитаны на работу за такими пределами.
На самом деле, многие скутеры имеют защиту от сбоев в своих ESC, которая отключает их при обнаружении состояния перенапряжения. Хитрые мастера могут обойти это, но сделать это может быть сложно, и, как правило, детали в любом случае не рассчитаны на работу за такими пределами.
Однако это не означает, что вам нужно прекратить охоту за большей производительностью. Ведь вы только начинаете!
Я поджарил двигатель из-за перенапряжения. Воняло как в аду и обожгло мои маленькие пальчики. YouTube/What Up TK Here
Полная замена трансмиссии
Если вы хотите ехать очень быстро на старой Miata, вам часто лучше отказаться от стандартного двигателя экономичного автомобиля в пользу чего-то с реальной производительностью. То же самое и с электросамокатами. Если вам нужна высокая производительность, не пытайтесь модифицировать уже имеющееся оборудование. Вырвите существующие ESC и батареи и замените их более мощным механизмом. Вы, вероятно, захотите заменить и двигатель — новая мощная батарея и ESC, скорее всего, обеспечат такую мощность, что ваш двигатель просто расплавится и превратится в якорь за считанные минуты. Это очень плохо пахнет (спросите меня, откуда я знаю), так что тоже выбросьте его.
Вы, вероятно, захотите заменить и двигатель — новая мощная батарея и ESC, скорее всего, обеспечат такую мощность, что ваш двигатель просто расплавится и превратится в якорь за считанные минуты. Это очень плохо пахнет (спросите меня, откуда я знаю), так что тоже выбросьте его.
Допустим, у вас есть скутер с двигателем мощностью 250 Вт, работающим от 36-вольтовой батареи. Вы можете вырвать все это и купить себе аккумулятор с более высоким напряжением, более мощный двигатель и соответствующий ESC. Они легко доступны на таких сайтах, как eBay или Aliexpress. Как правило, дорожный скутер был бы достаточно захватывающим с 48-вольтовой батареей и двигателем мощностью от 500 до 1500 Вт. Тем не менее, 60-вольтовые и 84-вольтовые сборки с двигателями мощностью более 5000 Вт не редкость, особенно в более крупных внедорожных скутерах с большим пространством для аккумуляторов.
Задача состоит в том, чтобы установить все эти новые компоненты внутри или на скутере. К счастью, колеса с более мощными ступичными двигателями легко доступны, поэтому самая трудная часть часто заключается в том, чтобы найти место, где можно спрятать большую и мощную батарею. Как правило, модернизированный регулятор скорости достаточно мал, чтобы его можно было закрепить где-нибудь на раме, если вы не можете установить его внутри. Вы, вероятно, обнаружите, что вам также нужен новый дроссель, чтобы взаимодействовать с вашим новым ESC.
Как правило, модернизированный регулятор скорости достаточно мал, чтобы его можно было закрепить где-нибудь на раме, если вы не можете установить его внутри. Вы, вероятно, обнаружите, что вам также нужен новый дроссель, чтобы взаимодействовать с вашим новым ESC.
Однако, если вы работаете со скутером с цепным или ременным приводом, вам, возможно, придется проявить больше изобретательности. Это часто включает в себя создание собственных креплений для более крупного и мощного двигателя. Цепные приводы предлагают некоторую гибкость в передаче, что тоже может быть полезно. Вы можете понизить передачу скутера, чтобы лучше преодолевать подъемы, или пойти другим путем, чтобы получить более высокую максимальную скорость.
Возиться с шестернями — хороший способ ехать быстрее. Вы даже можете сделать свои собственные звездочки, если запчасти трудно найти. Вот как я разогнал свой Razor E300, ориентированный на детей, до 25 миль в час. YouTube/What Up TK Here
Полная замена трансмиссии — отличный способ построить более быстрый скутер. Если вы выберете двигатель, ESC и аккумуляторы, которые подходят друг другу, ваш риск дыма, пожара и катастрофы будет намного ниже. Конечно, дешевые компоненты все еще могут сломаться, но у вас меньше шансов столкнуться с проблемами, если вы правильно настроите свои компоненты для совместной работы.
Если вы выберете двигатель, ESC и аккумуляторы, которые подходят друг другу, ваш риск дыма, пожара и катастрофы будет намного ниже. Конечно, дешевые компоненты все еще могут сломаться, но у вас меньше шансов столкнуться с проблемами, если вы правильно настроите свои компоненты для совместной работы.
Не будь мной: превосходство не всегда хорошо
Чем быстрее, тем лучше, верно? Ну, не всегда. Есть еще несколько проблем, с которыми вы можете столкнуться при попытке построить более быстрый электронный скутер.
Вы можете обнаружить, что выбранный вами скутер просто не любит ехать быстрее. Он может получить неприятные колебания после определенной скорости. Вы можете обнаружить, что ехать со скоростью 30 миль в час на скутере без подвески просто слишком страшно на ухабистых дорогах в вашем районе. Простые тормоза, установленные в стандартной комплектации, также могут не справиться с повторными остановками на более высоких скоростях и могут быстро выйти из строя или полностью развалиться.
Не будь мной, в этом весь фокус. Смысл этой статьи в том, чтобы вы извлекли уроки из моего опыта, спасая себя от слишком многих дымных и дорогостоящих неудач.
Моя первая сборка была чрезвычайно мощной. Это был самокат Razer без двигателя, и я прикрутил к задней части то, что якобы было 250-ваттным двигателем. При перенапряжении он был где-то ближе к 350. У него были крошечные четырехдюймовые резиновые колеса, отсутствие дорожного просвета, и я добавил добрых 20 фунтов стального веса, чтобы установить новую трансмиссию сзади.
После нескольких недель возни с этой штукой я отлично покатался, разогнавшись до 23 миль в час. Но только на абсолютно ровной поверхности, потому что даже камешек может отправить вас в полет с помощью этих крошечных твердых колес. О, и те самые колеса буквально расплавились в один прекрасный день, когда я ехал на нем по кругу. Пластиковые ступицы просто не были рассчитаны на то, чтобы передавать такую мощность на землю.
Я приделал звездочку к крошечному 100-миллиметровому колесу скутера, чтобы управлять им с помощью мотора. Летать по пригороду со скоростью 25 миль в час было очень весело, но колесо в конце концов растаяло. Lewin Day
Летать по пригороду со скоростью 25 миль в час было очень весело, но колесо в конце концов растаяло. Lewin Day
Я избежал нескольких травм, когда другие мои потрепанные скутеры внезапно вышли из строя. Мой самодельный регулятор скорости часто выходил из строя, и когда это случалось, он работал на полную мощность. Я медленно двигался по тропинке, а скутер внезапно вылетал из-под меня. Однажды мне удалось поймать его и поднять до такой степени, что я смог выдернуть аккумулятор, чтобы выключить его.
В качестве альтернативы, если бы мне удалось удержаться, я бы быстро поехал так быстро, что выпрыгивая с парашютом, можно было бы получить серьезную травму лодыжки или что-то похуже. Эти инциденты в конце концов вдохновили меня на принятие мер безопасности. Я привязал тросик к плавкому предохранителю на 100 ампер и прикрепил другой конец к запястью. Если бы у меня было внезапное неуправляемое ускорение, я мог бы дернуть запястье и отключить питание. Это та же концепция, что и те предохранительные зажимы, которые вы видите на беговых дорожках 9. 0012 .
0012 .
У вас тоже могут возникнуть проблемы с властями. Во многих городах и странах электрические скутеры строго ограничены определенным уровнем мощности — как упоминалось ранее, часто ниже 200 Вт. Существуют также ограничения на то, где вы можете ездить на них, а также на максимальную скорость. Полиция может не сразу определить выходную мощность вашего скутера, но они без колебаний примут меры, если вы громите местный парк и сбиваете детей на их трехколесных велосипедах.
Скутеры могут навредить вам. Мой ремешок на запястье не расстегивался, что не очень хорошо. YouTube/What Up TK Here Когда щеточные регуляторы скорости выходят из строя, они обычно работают на полную мощность. Часто бывает довольно забавно, если едешь не ты. YouTube/What Up TK Here
Более быстрые сборки не подходят для тротуара, а водители не привыкли высматривать водителей скутеров. Учитывайте собственную видимость и тщательно выбирайте место, где вы будете кататься. Если вы построили что-то действительно быстро, подумайте о том, чтобы оставить это в частной собственности для собственного безопасного удовольствия.