Содержание
Рабочие характеристики асинхронного двигателя | мтомд.инфо
Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2, КПД асинхронного двигателя η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Расчет рабочих характеристик асинхронного двигателя
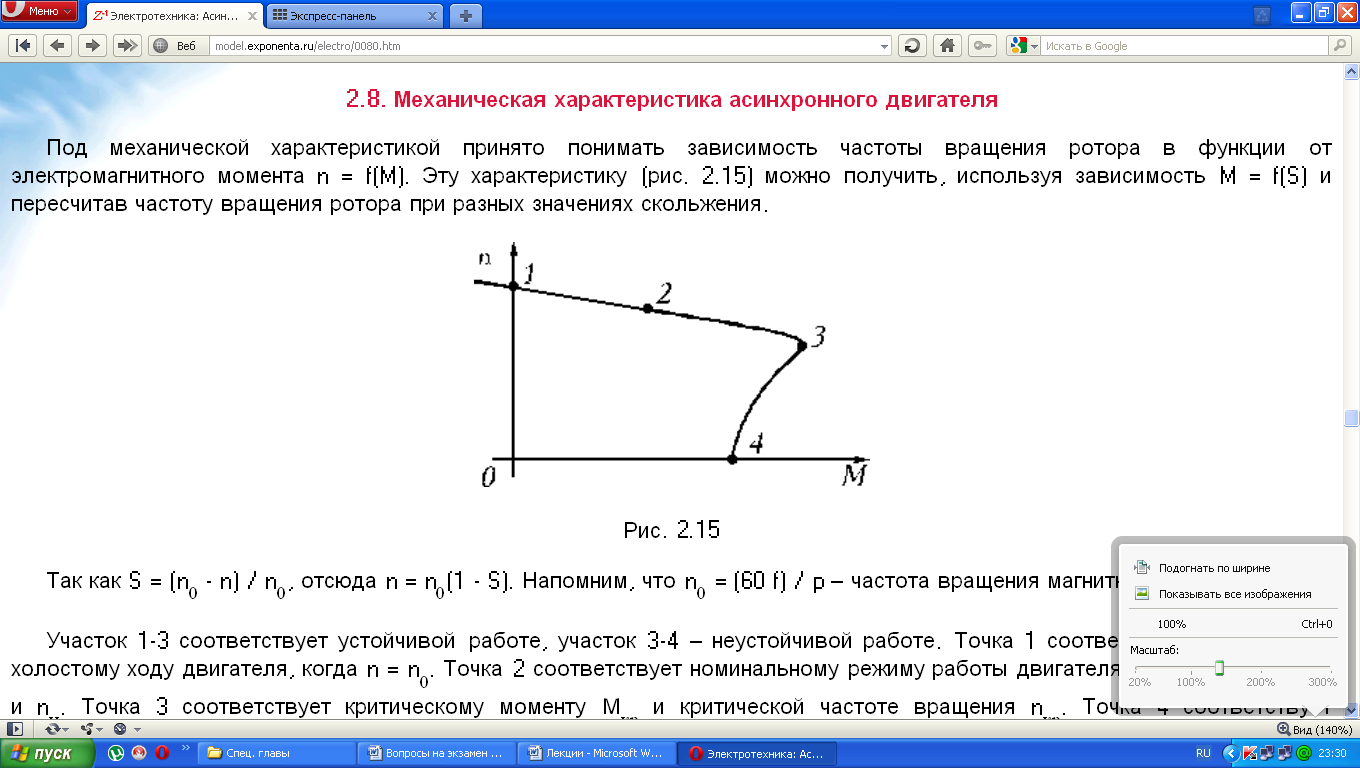
Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя n2 = n1(1 — s).
Скольжение s = Pэ2/Pэм, то есть скольжение асинхронного двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n2 ≈ n1.
По мере увеличения нагрузки на валу асинхронного двигателя отношение s = Pэ2/Pэм растет, достигая значений 0,01 — 0,08 при номинальной нагрузке. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора двигателя r2′ угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2′ возрастают электрические потери в роторе.
Рабочие характеристики асинхронного двигателя
Зависимость М2 = f(P2). Зависимость полезного момента на валу асинхронного двигателя М2 от полезной мощности Р2 определяется выражением M2 = Р2/ω2 = 60 P2/(2πn2) = 9,55Р2/n2, где Р2 — полезная мощность, Вт; ω2 = 2πf2/60 — угловая частота вращения ротора.
Из этого выражения следует, что если n2 = const, то график М2 = f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2 = f (P2) имеет криволинейный вид.
Зависимость cos φ1 = f (P2). В связи с тем что ток статора асинхронного двигателя I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму холостого хода. Объясняется это тем, что ток холостого хода электродвигателя I0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I0). В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ0), лишь немногим меньше 90°.
В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ0), лишь немногим меньше 90°.
Коэффициент мощности асинхронных двигателей в режиме холостого хода обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и коэффициент мощности возрастает, достигая наибольшего значения (0,80 — 0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки на валу двигателя сопровождается уменьшением cos φ1 что объясняется возрастанием индуктивного сопротивления ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе.
В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения cos φ1, целесообразно подводимое к двигателю напряжение U1 уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя.
Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя.
Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const. Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя n2 = n1(1 — s). Скольжение s = Pэ2/Pэм, т. е. скольжение асинхронного двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n20 ≈ n1. По мере увеличения нагрузки на валу асинхронного двигателя отношение s = Pэ2/Pэм растет, достигая значений 0,01 — 0,08 при номинальной нагрузке. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора двигателя r2′ угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2′ возрастают электрические потери в роторе.
Рис. 1. Рабочие характеристики асинхронного двигателя двигателя Зависимость М2 =f(P2). где Р2 — полезная мощность, Вт; ω2 = 2πf 2/ 60 — угловая частота вращения ротора. Из этого выражения следует, что если n2 = const, то график М2 =f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2 =f (P2) имеет криволинейный вид.
Рис. 2. Векторная диаграмма асинхронного двигателя при небольшой нагрузке Зависимость cos φ1 = f (P2). В связи с тем что ток статора асинхронного двигателя I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Коэффициент мощности асинхронных двигателей в режиме холостого хода обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и коэффициент мощности возрастает, достигая наибольшего значения (0,80 — 0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки на валу двигателя сопровождается уменьшением cos φ1 что объясняется возрастанием индуктивного сопротивления ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе. В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. На рис. 3 представлены графики зависимости cos φ1, асинхронного двигателя от нагрузки при соединении обмоток статора звездой (кривая 1) и треугольником (кривая 2).
Рис. 3. Зависимость cos φ1,от нагрузки при соединении обмотки статора двигателя звездой (1) и треугольником (2) Смотрите также: |
 Зависимость полезного момента на валу асинхронного двигателя М2 от полезной мощности Р2 определяется выражением M2 = Р2/ ω2 = 60 P2/ (2πn2) = 9,55Р2/ n2,
Зависимость полезного момента на валу асинхронного двигателя М2 от полезной мощности Р2 определяется выражением M2 = Р2/ ω2 = 60 P2/ (2πn2) = 9,55Р2/ n2, Наименьшее значение коэффициента мощности соответствует режиму холостого хода.Объясняется это тем, что ток холостого хода электродвигателя I0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I0). В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ0), лишь немногим меньше 90° (рис. 2).
Наименьшее значение коэффициента мощности соответствует режиму холостого хода.Объясняется это тем, что ток холостого хода электродвигателя I0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I0). В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ0), лишь немногим меньше 90° (рис. 2).  Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения cos φ1, целесообразно подводимое к двигателю напряжение U1 уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя.
Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения cos φ1, целесообразно подводимое к двигателю напряжение U1 уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя. Если у вас есть своё мнение, напишите нам в комментарии.
Если у вас есть своё мнение, напишите нам в комментарии.Асинхронные двигатели переменного тока | Как работают двигатели переменного тока
Асинхронные двигатели переменного тока | Как работают двигатели переменного тока — объясните это
Вы здесь:
Домашняя страница >
Электричество и электроника >
Асинхронные двигатели
- Дом
- индекс А-Я
- Случайная статья
- Хронология
- Учебное пособие
- О нас
- Конфиденциальность и файлы cookie
Реклама
Криса Вудфорда. Последнее обновление: 26 января 2023 г.
Вы знаете, как работают электродвигатели? Ответ, вероятно, да и нет! Хотя многие из нас узнали, как
основные моторные работы, из простых научных книг и веб-страниц, таких как эта, многие из
двигатели, которые мы используем каждый день — во всем, от заводских машин до
электрички — вообще так не работают. Что за книги
Что за книги
расскажите нам о простых двигателях постоянного тока (DC), которые имеют
петля из проволоки, вращающаяся между полюсами постоянного магнита; в реальной жизни,
большинство мощных двигателей используют переменный ток (AC) и
работают совершенно по-другому: это то, что мы называем индукционными
двигатели, и они весьма изобретательно используют вращающееся магнитное поле.
Давайте посмотрим поближе!
Фото: Электромагнетизм, создаваемый катушками из плотно намотанной медной проволоки, — это «мощность» асинхронных двигателей переменного тока. Фото Тейлора Л. Джексона предоставлено ВМС США и Wikimedia Commons.
Содержание
- Как работает обычный двигатель постоянного тока?
- Как работает двигатель переменного тока?
- Как работает асинхронный двигатель переменного тока?
- Асинхронные двигатели на практике
- Преимущества и недостатки асинхронных двигателей
- Кто изобрел асинхронный двигатель?
- Узнать больше
Как работает обычный двигатель постоянного тока?
Простые двигатели, описанные в научных книгах, основаны на
кусок проволоки, согнутый в прямоугольную петлю, которая подвешивается между
полюса магнита. (Физики назвали бы это
(Физики назвали бы это
проводник с током, находящийся в магнитном поле.) Когда
вы подключаете такой провод к батарее, через него протекает постоянный ток, создавая вокруг него временное магнитное поле. Это временное поле
отталкивает исходное поле от постоянного магнита, в результате чего проволока
перевернуть.
Обычно провод останавливается в этой точке, а затем снова переворачивается,
но если мы используем остроумное вращающееся соединение
называется коммутатором, мы можем менять направление тока каждый раз, когда
проволока переворачивается, и это означает, что проволока будет продолжать вращаться в
в том же направлении, пока течет ток. Это
суть простого электродвигателя постоянного тока, который был задуман в
1820-е годы Майкла Фарадея и
превратилось в практическое изобретение о
десять лет спустя Уильям Стерджен. (Более подробную информацию вы найдете в нашей вводной статье об электродвигателях.)
Рисунок: Электродвигатель постоянного тока основан на петле из проволоки, вращающейся внутри фиксированного магнитного поля, создаваемого постоянным магнитом. Коммутатор (разрезное кольцо) и щетки (угольные контакты коммутатора) меняют направление электрического тока каждый раз, когда провод переворачивается, благодаря чему он вращается в том же направлении.
Коммутатор (разрезное кольцо) и щетки (угольные контакты коммутатора) меняют направление электрического тока каждый раз, когда провод переворачивается, благодаря чему он вращается в том же направлении.
Прежде чем мы перейдем к двигателям переменного тока, давайте быстро
обобщить, что здесь происходит. В двигателе постоянного тока магнит (и его
магнитное поле) фиксируется на месте и образует внешнюю, статическую часть
двигатель (статор), а катушка провода, несущая электрический
ток формирует вращающуюся часть двигателя
(ротор). Магнитное поле исходит от статора, который представляет собой
постоянным магнитом, пока вы подаете электроэнергию на катушку, которая
составляет ротор. Взаимодействие между постоянными магнитными
поле статора и временное магнитное поле, создаваемое ротором
что заставляет двигатель крутиться.
Рекламные ссылки
Как работает двигатель переменного тока?
В отличие от игрушек и фонариков, в большинстве домов, офисов,
фабрики и другие здания не питаются от маленьких батареек:
они питаются не от постоянного тока, а от переменного
(AC), который меняет свое направление примерно 50 раз в секунду
(с частотой 50 Гц).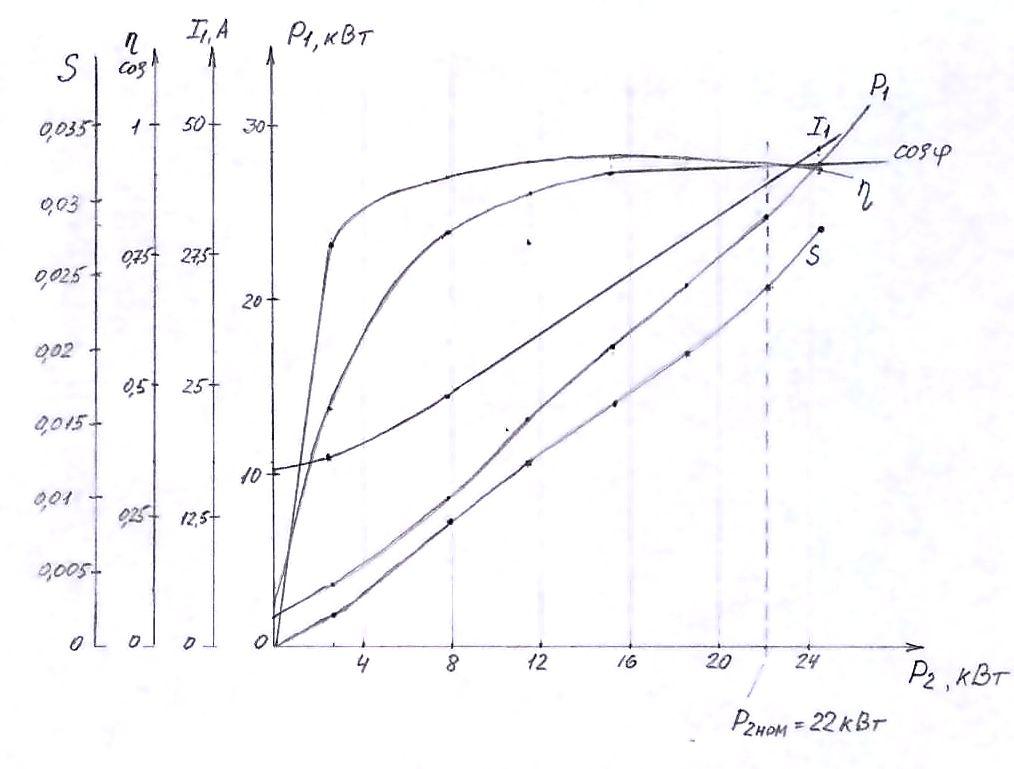 Если вы хотите, чтобы двигатель работал от бытовой сети переменного тока,
Если вы хотите, чтобы двигатель работал от бытовой сети переменного тока,
вместо батареи постоянного тока нужна другая конструкция двигателя.
В двигателе переменного тока есть кольцо электромагнитов
расположены снаружи (составляя статор),
которые предназначены для создания вращающегося магнитного поля.
Внутри статора есть сплошная металлическая ось, проволочная петля,
катушка, беличья клетка из металлических стержней и межсоединений
(например, вращающиеся клетки, которые люди иногда развлекают домашними мышами),
или какая-либо другая свободно вращающаяся металлическая деталь, которая может проводить
электричество. В отличие от двигателя постоянного тока, где вы отправляете энергию на внутреннюю
ротор, в двигателе переменного тока вы отправляете мощность на внешние катушки, которые составляют
статор. Катушки запитываются попарно, последовательно,
создавая магнитное поле, которое вращается вокруг двигателя снаружи.
Фото: Обычный асинхронный двигатель переменного тока со снятым корпусом и ротором, видны медные обмотки катушек, составляющих статор (статическая, неподвижная часть двигателя). Эти катушки предназначены для создания вращающегося магнитного поля, которое вращает ротор (подвижную часть двигателя) в пространстве между ними. Фото Дэвида Парсонса предоставлено Министерством энергетики США/NREL.
Эти катушки предназначены для создания вращающегося магнитного поля, которое вращает ротор (подвижную часть двигателя) в пространстве между ними. Фото Дэвида Парсонса предоставлено Министерством энергетики США/NREL.
Как это вращающееся поле заставляет двигатель двигаться? Помните, что ротор, подвешенный внутри
магнитное поле, является электрическим проводником. Магнитное поле постоянно меняется (потому что оно вращается), поэтому
согласно законам электромагнетизма (закону Фарадея, если быть точным), магнитное поле производит (или индуцирует, используя термин Фарадея) электрический ток внутри ротора. Если проводник представляет собой кольцо или проволоку, ток течет по нему по петле. Если проводник представляет собой просто цельный кусок металла, вокруг него закручиваются вихревые токи. В любом случае индуцированный ток производит свое
собственного магнитного поля и, согласно другому закону электромагнетизма
(закон Ленца) пытается остановить то, что его вызывает —
вращающееся магнитное поле — также вращением. (Вы можете думать о роторе
(Вы можете думать о роторе
отчаянно пытаясь «догнать» вращающееся магнитное поле, чтобы устранить
разница в движении между ними.) Электромагнитная индукция является ключом к тому, почему такой двигатель вращается, и поэтому он называется асинхронным двигателем.
Фото: Эффективный асинхронный двигатель переменного тока. Фото Аль Пуэнте любезно предоставлено
НРЕЛ.
Как работает асинхронный двигатель переменного тока?
Вот небольшая анимация, чтобы подвести итог и, надеюсь, сделать все понятным:
- Две пары катушек электромагнитов, показанные здесь красным и синим цветом, по очереди питаются от источника переменного тока (не показан, но входит в провода справа). Две красные катушки соединены последовательно и запитываются вместе, а две синие
катушки подключены одинаково. Поскольку это переменный ток, ток в каждой катушке не включается и не выключается резко (как показано на этой анимации), а плавно возрастает и падает в форме синусоиды: когда красные катушки наиболее активны, синие катушки полностью неактивны, и наоборот. Другими словами, их токи не совпадают (90° не по фазе).
Другими словами, их токи не совпадают (90° не по фазе). - Когда катушки находятся под напряжением, магнитное поле, которое они создают между ними, индуцирует электрический ток в роторе. Этот ток создает собственное магнитное поле, которое пытается противодействовать тому, что его вызвало (магнитному полю внешних катушек). Взаимодействие между двумя полями заставляет ротор вращаться.
- Поскольку магнитное поле чередуется между красной и синей катушками, оно эффективно вращается вокруг двигателя. Вращающееся магнитное поле заставляет ротор вращаться в том же направлении и (теоретически) почти с той же скоростью.
 Другими словами, их токи не совпадают (90° не по фазе).
Другими словами, их токи не совпадают (90° не по фазе).Асинхронные двигатели на практике
Что управляет скоростью двигателя переменного тока?
Фото: Частотно-регулируемый двигатель. Фото Уоррена Гретца предоставлено
НРЕЛ.
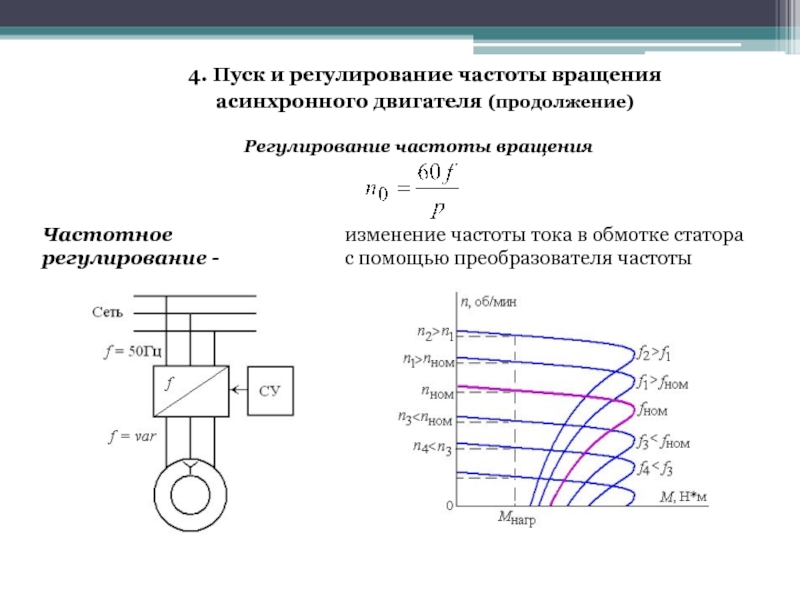
В синхронных двигателях переменного тока ротор вращается точно с той же скоростью, что и вращающееся магнитное поле; в асинхронном двигателе ротор всегда вращается с меньшей скоростью, чем поле, что делает его примером так называемого асинхронного двигателя переменного тока. Теоретическая скорость ротора асинхронного двигателя зависит от частоты сети переменного тока и количества витков, составляющих статор, и при отсутствии нагрузки на двигатель приближается к скорости вращающегося магнитного поля. На практике нагрузка на двигатель (что бы он ни приводил) также играет роль, замедляя ротор. Чем больше нагрузка, тем больше «скольжение» между скоростью вращающегося магнитного поля и фактической скоростью вращения ротора. Чтобы контролировать скорость двигателя переменного тока (заставить его работать быстрее или медленнее), вы должны увеличить или уменьшить частоту источника переменного тока, используя так называемый
Теоретическая скорость ротора асинхронного двигателя зависит от частоты сети переменного тока и количества витков, составляющих статор, и при отсутствии нагрузки на двигатель приближается к скорости вращающегося магнитного поля. На практике нагрузка на двигатель (что бы он ни приводил) также играет роль, замедляя ротор. Чем больше нагрузка, тем больше «скольжение» между скоростью вращающегося магнитного поля и фактической скоростью вращения ротора. Чтобы контролировать скорость двигателя переменного тока (заставить его работать быстрее или медленнее), вы должны увеличить или уменьшить частоту источника переменного тока, используя так называемый
частотно-регулируемый привод. Поэтому, когда вы регулируете скорость чего-то вроде фабричной машины, питаемой от асинхронного двигателя переменного тока, вы на самом деле управляете цепью, которая повышает или понижает частоту тока, приводящего в движение двигатель.
Что такое «фаза» двигателя переменного тока?
Мы не обязательно должны управлять ротором с четырьмя катушками (две противоположные пары), как показано здесь. Можно построить асинхронные двигатели с любым другим расположением катушек. Чем больше у вас катушек, тем плавнее будет работать двигатель. Количество отдельных электрических токов, питающих катушки независимо, не синхронно, известно как фаза двигателя, поэтому показанная выше конструкция представляет собой двухфазный двигатель (с двумя токами, питающими четыре катушки, которые работают не синхронно в двух парах). ). В трехфазном двигателе у нас может быть три катушки, расположенные вокруг статора треугольником, шесть равномерно расположенных катушек (три пары) или даже 12 катушек (три набора по четыре катушки) с одной, двумя или четырьмя катушками. включается и выключается одновременно тремя отдельными противофазными токами.
Можно построить асинхронные двигатели с любым другим расположением катушек. Чем больше у вас катушек, тем плавнее будет работать двигатель. Количество отдельных электрических токов, питающих катушки независимо, не синхронно, известно как фаза двигателя, поэтому показанная выше конструкция представляет собой двухфазный двигатель (с двумя токами, питающими четыре катушки, которые работают не синхронно в двух парах). ). В трехфазном двигателе у нас может быть три катушки, расположенные вокруг статора треугольником, шесть равномерно расположенных катушек (три пары) или даже 12 катушек (три набора по четыре катушки) с одной, двумя или четырьмя катушками. включается и выключается одновременно тремя отдельными противофазными токами.
Анимация: трехфазный двигатель, работающий от трех токов (обозначен красным, зеленым и
синие пары катушек), сдвинутые по фазе на 120°.
Преимущества и недостатки асинхронных двигателей
Преимущества
Самым большим преимуществом асинхронных двигателей переменного тока является их простота. У них есть только одна движущаяся часть,
У них есть только одна движущаяся часть,
ротор, что делает их недорогими, тихими, долговечными и относительно безотказными. ОКРУГ КОЛУМБИЯ
двигатели, напротив, имеют коллектор и угольные щетки, которые изнашиваются
выходят из строя и время от времени нуждаются в замене. Трение между щетками и
коммутатор также делает двигатели постоянного тока относительно шумными (а иногда даже довольно вонючими).
[1]
Произведение искусства: Электродвигатели чрезвычайно эффективны, обычно они преобразуют около 85 процентов поступающей электроэнергии в полезную, исходящую механическую работу. Несмотря на это, внутри обмоток по-прежнему теряется довольно много энергии в виде тепла, поэтому двигатели могут сильно нагреваться. Большинство промышленных двигателей переменного тока имеют встроенные системы охлаждения. Внутри корпуса есть вентилятор, прикрепленный к валу ротора (на противоположном конце оси, приводящей в движение любую машину, к которой прикреплен двигатель), показанный здесь красным. Вентилятор всасывает воздух в мотор, обдувая его снаружи корпуса мимо ребер радиатора. Если вы когда-нибудь задумывались, почему у электродвигателей такие выступы снаружи (как вы можете видеть на различных фотографиях на этой странице), то причина в том, что они охлаждают двигатель.
Вентилятор всасывает воздух в мотор, обдувая его снаружи корпуса мимо ребер радиатора. Если вы когда-нибудь задумывались, почему у электродвигателей такие выступы снаружи (как вы можете видеть на различных фотографиях на этой странице), то причина в том, что они охлаждают двигатель.
Недостатки
Поскольку скорость асинхронного двигателя зависит от частоты переменного тока, приводящего его в движение, он вращается со
постоянная скорость, если вы не используете частотно-регулируемый привод; скорость двигателей постоянного тока намного легче контролировать, просто повышая или понижая напряжение питания. Хотя асинхронные двигатели относительно просты, они могут быть довольно тяжелыми и громоздкими из-за их катушек. В отличие от двигателей постоянного тока, они не могут работать от батарей или любого другого источника постоянного тока (например, солнечных батарей) без использования инвертора (устройства, которое превращает постоянный ток в переменный). Это потому, что им нужно переменное магнитное поле, чтобы вращать ротор.
Фото: Статор создает магнитное поле с помощью плотно намотанных катушек из медной проволоки,
которые называются обмотками. Когда электродвигатель изнашивается или перегорает, один из вариантов — заменить его другим двигателем. Иногда проще заменить обмотки двигателя новым проводом — квалифицированная работа, называемая перемоткой, что и происходит здесь. Фото Сета Скарлетта любезно предоставлено
ВМС США.
Кто изобрел асинхронный двигатель?
Никола Тесла (1856–1943) был физиком.
и плодовитый изобретатель, чей удивительный вклад в науку и технику
никогда не были полностью признаны. После того, как он прибыл в Соединенные Штаты в возрасте 28 лет, он начал
работал на знаменитого пионера электротехники Томаса Эдисона. Но двое мужчин выпали
катастрофически и вскоре стали заклятыми соперниками. Тесла твердо верил
что переменный ток (AC) намного превосходит постоянный ток (DC),
в то время как Эдисон думал об обратном. Со своим партнером Джорджем
Вестингауз, Тесла защищали переменный ток, а Эдисон
полны решимости управлять миром в округе Колумбия и придумывали всевозможные
рекламные трюки, чтобы доказать, что переменный ток слишком опасен для широкого использования
(изобретение электрического стула, чтобы доказать, что переменный ток может быть смертельным, и
даже убить слона Топси электрическим током, чтобы показать, насколько это смертельно и жестоко). Битва между этими двумя
Битва между этими двумя
очень разные взгляды на электроэнергию иногда называют Войной токов.
Работа: Оригинальный дизайн Николы Теслы для асинхронного двигателя переменного тока. Это работает точно так же, как анимация выше, с двумя синими и двумя красными катушками, попеременно питаемыми генератором справа. Это произведение искусства взято из оригинального патента Теслы, депонированного в Бюро по патентам и товарным знакам США, с которым вы можете ознакомиться самостоятельно в приведенных ниже ссылках.
Несмотря на все (или худшие) усилия Эдисона, Тесла победил, и теперь электричество переменного тока обеспечивает большую часть энергии.
мира. Во многом поэтому многие электродвигатели,
электроприборы в наших домах, фабриках и офисах работают на переменном токе.
асинхронные двигатели, работающие от вращающихся магнитных полей, которые Никола
Тесла разработал в 1880-х годах (его патент, показанный здесь, был выдан в мае 1888 года). итальянский физик по имени
Галилео Феррарис самостоятельно выдвинул ту же идею примерно в то же время, но история обошлась с ним еще более жестоко, чем с Теслой, и его имя сейчас почти забыто.
Инновации Теслы были началом истории, но ни в коем случае не концом.
К концу 1880-х годов уроженец России пионер электротехники Михаил Доливо-Добровольский изобрел трехфазные двигатели. А усовершенствованные моторы проектируются и разрабатываются по сей день.
Узнать больше
На этом сайте
- Батарейки
- Вихретоковые тормоза (электромагнитные тормоза)
- Электричество
- Электродвигатели
- Двигатели
- Ступичные двигатели
- Линейные двигатели
- Шаговые двигатели
На других сайтах
- Электродвигатели и генераторы Джо Вулфа. На превосходном веб-сайте Physclips есть превосходная страница, на которой сравниваются различные типы двигателей постоянного и переменного тока с некоторыми действительно отличными анимациями.
- PBS: Tesla: Master of Lightning: отличный мини-сайт о Николе Тесле, его жизни и удивительных изобретениях.

Книги
Для читателей старшего возраста
- Электродвигатели и приводы: основы, типы и применение Остина Хьюза и Билла Друри, Newnes (Elsevier), 2019. Асинхронные двигатели рассматриваются в главах 5, 6 и 7.
- «Волшебник: жизнь и времена Николы Теслы», Марк Дж. Сейфер, Кенсингтон, 2016 г.
- Тесла: Человек вне времени Маргарет Чейни, Touchstone, 2011.
Для младших читателей
- Электричество для молодых мастеров: Веселые и легкие проекты «Сделай сам» Марка де Винка. Maker Media/O’Reilly, 2017. Отличное практическое введение в электричество, включая пару заданий, связанных с созданием электродвигателей с нуля. Возраст 9–12.
- Эксперименты с электродвигателем, Эд Соби. Enslow, 2011. Это отличное общее введение в электродвигатели с большим количеством более широкого контекста науки и техники. Однако по очевидным практическим соображениям и соображениям безопасности он ориентирован только на проекты с двигателями постоянного тока и лучше всего подходит для детей в возрасте 11–14 лет.
- Сила и энергия Криса Вудфорда. Facts on File, 2004. Одна из моих книг, посвященная истории человеческих усилий по использованию энергии с древних времен до наших дней. Возраст 10+.
- Никола Тесла: разработчик электроэнергии Криса Вудфорда, в книге «Изобретатели и изобретения», том 5. Нью-Йорк: Маршалл Кавендиш, 2008 г. Краткую биографию Теслы я написал несколько лет назад. На момент написания все это, кажется, было доступно в Интернете по этой ссылке на Google Книги. Возраст 9–12 лет.
Патенты
Патенты предлагают более глубокие технические детали и собственное понимание изобретателем своей работы. Вот очень небольшая подборка многих патентов США, касающихся асинхронных двигателей.
Пожалуйста, НЕ копируйте наши статьи в блоги и другие веб-сайты.
Статьи с этого веб-сайта зарегистрированы в Бюро регистрации авторских прав США. Копирование или иное использование зарегистрированных произведений без разрешения, удаление этого или других уведомлений об авторских правах и/или нарушение смежных прав может повлечь за собой серьезные гражданские или уголовные санкции.
Авторские права на текст © Chris Woodford 2012, 2020. Все права защищены. Полное уведомление об авторских правах и условия использования.
Подписывайтесь на нас
Оцените эту страницу
Пожалуйста, оцените эту страницу или оставьте отзыв, и я сделаю пожертвование WaterAid.
Сохранить или поделиться этой страницей
Нажмите CTRL + D, чтобы добавить эту страницу в закладки на будущее или рассказать о ней друзьям:
Цитировать эту страницу
Вудфорд, Крис. (2012/2023) Асинхронные двигатели. Получено с https://www.explainthatstuff.com/induction-motors.html. [Доступ (вставьте дату здесь)]
Бибтекс
@misc{woodford_induction_motors,
автор = «Вудфорд, Крис»,
title = «Асинхронные двигатели»,
publisher = «Объясните это»,
год = «2012»,
url = «https://www.explainthatstuff.com/induction-motors.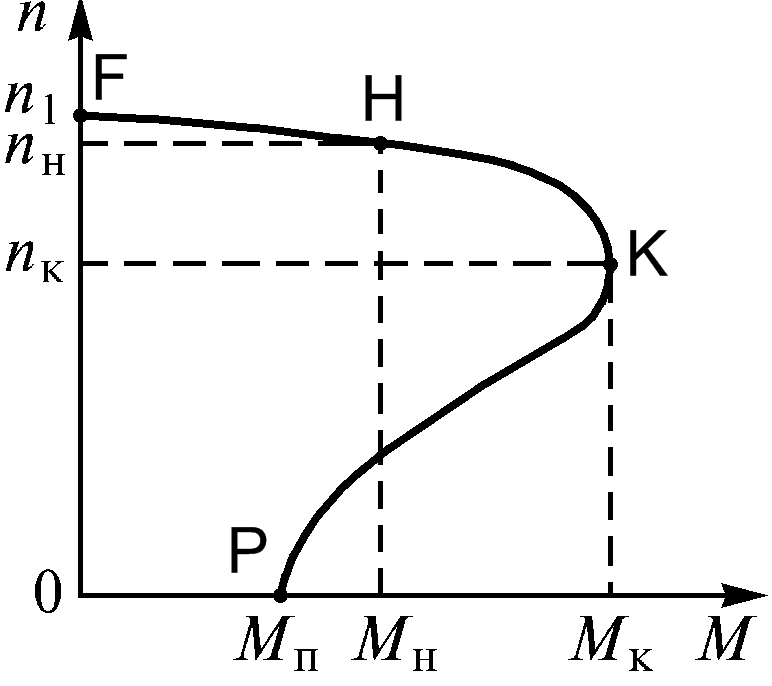 html»,
html»,
URL-адрес = «2023-01-26»
}
Подробнее на нашем веб-сайте…
- Средства связи
- Компьютеры
- Электричество и электроника
- Энергия
- Машиностроение
- Окружающая среда
- Гаджеты
- Домашняя жизнь
- Материалы
- Наука
- Инструменты и приборы
- Транспорт
↑ Вернуться к началу
Конструкция асинхронного двигателя — схема Globe
Трехфазный асинхронный двигатель является предпочтительным типом двигателя. Он в основном используется в промышленных приводах, потому что он очень разумный и энергичный, экономичный и надежный. Его также называют асинхронным двигателем, потому что он не работает с синхронной скоростью. Асинхронный двигатель требует минимального обслуживания, а также обладает высокой перегрузочной способностью.
Состав:
- Конструкция статора
- Конструкция ротора
Трехфазный асинхронный двигатель в основном состоит из двух частей, называемых статором и ротором . Статор — это неподвижная часть асинхронного двигателя, а ротор — вращающаяся часть. Конструкция статора аналогична трехфазному синхронному двигателю, а конструкция ротора различна для разных машин. Конструкция асинхронного двигателя подробно описана ниже.
Статор — это неподвижная часть асинхронного двигателя, а ротор — вращающаяся часть. Конструкция статора аналогична трехфазному синхронному двигателю, а конструкция ротора различна для разных машин. Конструкция асинхронного двигателя подробно описана ниже.
Конструкция статора
Статор состоит из пластин из высококачественной легированной стали для уменьшения потерь на вихревые токи. Он состоит из трех основных частей, а именно внешней рамы, сердечника статора и обмотки статора.
Внешняя рама
Внешний корпус двигателя. Его основная функция заключается в поддержке сердечника статора и защите внутренних частей машины. Для небольших машин внешняя рама отливается, а для больших машин она изготавливается. На рисунке ниже показана конструкция статора.
Сердечник статора
Сердечник статора изготовлен из высококачественной штампованной кремнистой стали. Его основная функция заключается в переносе переменного магнитного поля, которое создает потери на гистерезис и вихревые токи. Штамповки закреплены на раме статора. Каждое тиснение изолировано от другого тонким слоем лака. Толщина штамповки обычно варьируется от 0,3 до 0,5 мм . На внутренней стороне штамповок пробиты прорези, как показано на рисунке ниже:
Штамповки закреплены на раме статора. Каждое тиснение изолировано от другого тонким слоем лака. Толщина штамповки обычно варьируется от 0,3 до 0,5 мм . На внутренней стороне штамповок пробиты прорези, как показано на рисунке ниже:
Обмотки статора
Сердечник статора несет трехфазные обмотки, которые обычно питаются от трехфазной сети. Шесть выводов обмоток (по два каждой фазы) соединяются в клеммной коробке машины. Статор двигателя намотан на определенное число полюсов в зависимости от скорости двигателя. Если число полюсов больше, скорость двигателя будет меньше, а если число полюсов меньше, то скорость будет высокой.
Поскольку соотношение между скоростью и полюсом двигателя задается как:
Обмотки могут быть соединены звездой и треугольником.
Конструкция ротора
Ротор также изготовлен из тонких пластин из того же материала, что и статор. Многослойный цилиндрический сердечник устанавливается непосредственно на вал. Эти пластины имеют прорези на внешней стороне для размещения проводников. Есть два типа роторов.
Эти пластины имеют прорези на внешней стороне для размещения проводников. Есть два типа роторов.
Ротор с короткозамкнутым ротором
Ротор с короткозамкнутым ротором состоит из многослойного цилиндрического сердечника. Круглые прорези на внешней периферии полузакрыты. Каждый слот содержит неизолированный стержневой проводник из алюминия или меди. На конце ротора проводники закорочены толстым кольцом из меди или алюминия. Схема короткозамкнутого ротора показана ниже:
Пазы ротора обычно не параллельны валу, а скошены. Перекос проводников ротора имеет следующие преимущества, указанные ниже:
- Уменьшает гудение и обеспечивает плавную и бесшумную работу.
- В результате получается одинаковая кривая крутящего момента для различных положений ротора.
- Снижена тенденция к блокировке ротора. Так как зубья ротора и статора притягиваются друг к другу и замыкаются.
- Увеличивает сопротивление ротора за счет увеличения длины проводников стержня ротора.

Преимущества короткозамкнутого ротора
Ниже приведены следующие преимущества короткозамкнутого ротора:
- Клеточный ротор дешевле, а конструкция надежнее.
- Отсутствие щеток снижает риск искрения.
- Его обслуживание меньше.
- Коэффициент мощности выше.
- КПД ротора в клетке выше.
Ротор с фазовой обмоткой
Ротор с фазовой обмоткой также называют ротором с контактными кольцами. Он состоит из цилиндрического сердечника, который ламинирован. На внешней периферии ротора имеется полузакрытый паз, в котором размещены 3-фазные изолированные обмотки. Обмотки ротора соединены в звезду.
Асинхронный двигатель с контактными кольцами показан на рисунке ниже:
Контактные кольца установлены на валу со щетками, опирающимися на них. Щетки подключены к переменному резистору. Функция контактных колец и щеток состоит в том, чтобы обеспечить возможность подключения внешних резисторов в цепи ротора.