Содержание
Электрические приводы. Виды и устройство. Применение и работа
Электропривод – электромеханическая система, служащая для привода в движение функциональных органов машин и агрегатов для выполнения определенного технологического процесса. Электрические приводы состоят из электродвигателя, устройства преобразования, управления и передачи.
С прогрессом промышленного производства электрические приводы заняли в быту и на производстве лидирующую позицию по числу электродвигателей и общей мощности. Рассмотрим структуру, типы, классификацию электроприводов, и предъявляемые к нему требования.
1 — Передний крепеж
2 — Винтовая передача
3 — Концевой датчик
4 — Электродвигатель
5 — Зубчатая передача
6 — Задний крепеж
Функциональные компоненты
- Р – регулятор служит для управления электроприводом.
- ЭП – электрический преобразователь служит для преобразования электроэнергии в регулируемую величину напряжения.

- ЭМП – электромеханический преобразователь электричества в механическую энергию.
- МП – механический преобразователь способен изменять быстродействие и характер движения двигателя.
- Упр – управляющее действие.
- ИО – исполнительный орган.

Функциональные части
- Электропривод.
- Механическая часть.
- Система управления.
Исполнительный механизм является устройством, которое смещает рабочую деталь по поступающему сигналу от управляющего механизма. Рабочими деталями могут быть шиберы, клапаны, задвижки, заслонки. Они изменяют количество поступающего вещества на объект.
Рабочие органы могут двигаться поступательно, вращательно в определенных пределах. С их участием производится воздействие на объект. Чаще всего электропривод с исполнительным механизмом состоят из электропривода, редуктора, датчиков положения и узла обратной связи.
Сегодня электрические приводы модернизируются по их снижению веса, эффективности действия, экономичности, долговечности и надежности.
Свойства привода
- Статические. Механическая и электромеханическая характеристика.
- Механические. Это зависимость скорости вращения от момента сопротивления. При анализе динамических режимов механические характеристики полезны и удобны.
- Электромеханические. Это зависимость скорости вращения от тока.
- Динамические. Это зависимость координат электропривода в определенный момент времени при переходном режиме.
Классификация
Электрические приводы обычно классифицируются по различным параметрам и свойствам, присущим им. Рассмотрим основные из них.
По виду движения:
- Вращательные.
- Поступательные.
- Реверсивные.
- Возвратно-поступательные.
По принципу регулирования:
- Нерегулируемый.
- Регулируемый.
- Следящий.
- Программно управляемый.
- Адаптивный. Автоматически создает оптимальный режим при изменении условий.
- Позиционный.

По виду передаточного устройства:
- Редукторный.
- Безредукторный.
- Электрогидравлический.
- Магнитогидродинамический.
По виду преобразовательного устройства:
- Вентильный. Преобразователем является транзистор или тиристор.
- Выпрямитель-двигатель. Преобразователем является выпрямитель напряжения.
- Частотный преобразователь-двигатель. Преобразователем является регулируемый частотник.
- Генератор-двигатель.
- Магнитный усилитель-двигатель.
По методу передачи энергии:
- Групповой. От одного мотора через трансмиссию приводятся в движение другие исполнительные органы рабочих машин. В таком приводе очень сложное устройство кинематической цепи. Электрические приводы такого вида являются неэкономичными из-за их сложной эксплуатации и автоматизации. Поэтому такой привод сегодня не нашел широкого применения.
- Индивидуальный. Он характерен наличием у каждого исполнительного органа отдельного электродвигателя. Такой привод является одним из основных на сегодняшний день, так как кинематическая передача имеет простое устройство, улучшены условия техобслуживания и автоматизации. Индивидуальный привод нашел популярность в современных механизмах: сложных станках, роботах-манипуляторах, подъемных машинах.
- Взаимосвязанный. Такой привод имеет несколько связанных электроприводов. При их функционировании поддерживается соотношение скоростей и нагрузок, а также положение органов машин. Взаимосвязанные электрические приводы необходимы по соображениям технологии и устройству. Для примера можно назвать привод ленточного конвейера, механизма поворота экскаватора, или шестерни винтового пресса большой мощности. Для постоянного соотношения скоростей без механической связи применяется схема электрической связи нескольких двигателей. Такая схема получила название схемы электрического вала. Такой привод используется в сложных станках, устройствах разводных мостов.
 Поэтому такой привод сегодня не нашел широкого применения.
Поэтому такой привод сегодня не нашел широкого применения. Такая схема получила название схемы электрического вала. Такой привод используется в сложных станках, устройствах разводных мостов.
Такая схема получила название схемы электрического вала. Такой привод используется в сложных станках, устройствах разводных мостов.По уровню автоматизации:
- Автоматизированные.
- Неавтоматизированные.
- Автоматические.
По роду тока:
- Постоянного тока.
- Переменного тока.
По важности операций:
- Главный привод.
- Вспомогательный привод.
Подбор электродвигателя
Чтобы приводы производили качественную работу, необходимо правильно выбрать электрический двигатель. Это создаст условия долгой и надежной работы, а также повысит эффективность производства.
При подборе электродвигателя для привода агрегатов целесообразно следовать некоторым советам по:
- Требованиям технологического процесса выбирают двигатель с соответствующими характеристиками, конструктивного исполнения, а также метода фиксации и монтажа.
- Соображениям экономии подбирают надежный, экономичный и простой двигатель, который не нуждается в больших расходах на эксплуатацию, имеет малый вес, низкую цену и небольшие размеры.
- Условиям внешней среды и безопасности подбирают соответствующее исполнение мотора.
Правильный подбор электродвигателя обуславливает технико-экономические свойства всего привода, его надежность и длительный срок работы.
Преимущества
- Возможность более точного подбора мощности двигателя для электропривода.
- Электрический мотор менее пожароопасен в отличие от других типов двигателей.
- Приводы дают возможность быстрого пуска и остановки механизма, его плавного торможения.
- Нет необходимости в специальных регуляторах питания для электродвигателя. Все процессы происходят в автоматическом режиме.
- Приводы дают возможность подбора мотора, свойства которого лучше других моделей сочетаются с характеристиками агрегата.
- С помощью электрического привода можно плавно регулировать обороты механизма в определенных пределах.
- Электродвигатель может преодолеть большие и долговременные перегрузки.
- Электропривод дает возможность получения максимальной скорости и производительности рабочего механизма.
- Электродвигатель дает возможность экономить электричество, а при определенных условиях даже генерировать ее в сеть.
- Полная и простая автоматизация установок и механизмов возможна только с помощью электроприводов.
- КПД электромоторов имеет наибольший показатель по сравнения с другими моделями двигателей.
- Моторы производят с повышенной уравновешенностью. Это дает возможность встраивания их в механизмы машин, делать менее массивным фундамент.

Инновационные электрические приводы все автоматизированы. Системы управления приводом дают возможность рационального построения технологических процессов, увеличить производительность и эффективность труда, оптимизировать качество продукции и уменьшить ее цену.
Технические требования
К любым техническим механизмам и агрегатам предъявляются определенные требования технического плана. Не стали исключением и электроприводы. Рассмотрим основные предъявляемые к ним требования.
Надежность
В соответствии с этим требованием привод должен исполнять определенные функции и заданных условиях в течение некоторого интервала времени, с расчетной вероятностью работы без возникновения неисправностей.
При невыполнении этих требований остальные свойства оказываются бесполезными. Надежность может значительно отличаться в зависимости от характера работы. В некоторых механизмах не требуется долгого времени работы, однако отказ механизма не должен иметь место. Такой пример можно найти в военной промышленности. И другой пример, где наоборот, время службы должно быть большим, а отказ устройства вполне возможен, и не приведет к серьезным последствиям.
Точность
Это требование связано с отличием показателей от заданных. Они не могут превышать допустимые величины. Электроприводы должны обеспечивать перемещение рабочего элемента на определенный угол или за некоторое время, а также поддерживать на определенном уровне скорость, ускорение или момент вращения.
Быстродействие
Это качество привода обеспечивает быструю реакцию на разные воздействия управления. Быстродействие связано с точностью.
Качество
Такая характеристика обеспечивает качество процессов перехода, исполнение определенных закономерностей их выполнения. Качественные требования создаются вследствие особенностей работы машин с электроприводами.
Качественные требования создаются вследствие особенностей работы машин с электроприводами.
Энергетическая эффективность
Любые производственные процессы преобразования и передачи имеют потери энергии. Наиболее важным это качество стало в применении электроприводов механизмов, приводах значительной мощности, долгим режимом эксплуатации. Эффективность использования энергии определяется КПД.
Совместимость
Электрические приводы должны совмещаться с работой аппаратуры, в которой они применяются, с их системой снабжения электроэнергией, информационными данными, а также с рабочими элементами. Наиболее остро стоит требование совместимости электроприводов для медицинской и бытовой техники, в радиотехнике.
Похожие темы:
- Сервоприводы. Виды и устройство. Характеристики и применение
- Шаговые электродвигатели. Виды и работа. Особенности
- Исполнительные устройства. Виды и работа. Применение и особенности
- Актуаторы. Виды и устройство. Работа и применение. Особенности
- Электростартер. Виды и устройство. Работа и неисправности
 Виды и устройство. Работа и применение. Особенности
Виды и устройство. Работа и применение. ОсобенностиОднофазный асинхронный электродвигатель
Дмитрий Левкин
- Однофазный электродвигатель с пусковой обмоткой
- Конструкция однофазного асинхронного двигателя
- Принцип работы однофазного двигателя
- Пуск однофазного двигателя
- Подключение однофазного двигателя
- Однофазный электродвигатель с экранированными полюсами
- Электродвигатель с асимметричным магнитопроводом статора
Конструкция однофазного двигателя с вспомогательной или пусковой обмоткой
Основными компонентами любого электродвигателя являются ротор и статор. Ротор — вращающаяся часть электродвигателя, статор — неподвижная часть электродвигателя, с помощью которого создается магнитное поле для вращения ротора.
Основные части однофазного двигателя: ротор и статор
Статор имеет две обмотки, расположенные под углом 90° относительно друг друга. Основная обмотка называется главной (рабочей) и обычно занимает 2/3 пазов сердечника статора, другая обмотка называется вспомогательной (пусковой) и обычно занимает 1/3 пазов статора.
Двигатель фактически является двухфазным, но так как рабочей является только одна обмотка, электродвигатель называют однофазным.
Ротор обычно представляет из себя короткозамкнутую обмотку, также из-за схожести называемой «беличьей клеткой». Медные или алюминиевые стержни которого с торцов замкнуты кольцами, а пространство между стержнями чаще всего заливается сплавом алюминия. Так же ротор однофазного двигателя может быть выполнен в виде полого немагнитного или полого ферромагнитного цилиндра.
Однофазный двигатель с вспомогательной обмоткой имеет 2 обмотки расположенные перпендикулярно относительно друг друга
Принцип работы однофазного асинхронного двигателя
Для того чтобы лучше понять работу однофазного асинхронного двигателя, давайте рассмотрим его только с одним витком в главной и вспомогательной обмотки.
Проанализируем случай с двумя обмотками имеющими по оному витку
Рассмотрим случай когда в вспомогательной обмотки не течет ток. При включении главной обмотки статора в сеть, переменный ток, проходя по обмотке, создает пульсирующее магнитное поле, неподвижное в пространстве, но изменяющееся от +Фmах до -Фmах.
Остановить
Пульсирующее магнитное поле
Если поместить ротор, имеющий начальное вращение, в пульсирующее магнитное поле, то он будет продолжать вращаться в том же направлении.
Чтобы понять принцип действия однофазного асинхронного двигателя разложим пульсирующее магнитное поле на два одинаковых круговых поля, имеющих амплитуду равную Фmах/2 и вращающихся в противоположные стороны с одинаковой частотой:
,
- где nпр – частота вращения магнитного поля в прямом направлении, об/мин,
- nобр – частота вращения магнитного поля в обратном направлении, об/мин,
- f1 – частота тока статора, Гц,
- p – количество пар полюсов,
- n1 – скорость вращения магнитного потока, об/мин
Остановить
Разложение пульсирующего магнитного потока на два вращающихся
Действие пульсирующего поля на вращающийся ротор
Рассмотрим случай когда ротор, находящийся в пульсирующем магнитном потоке, имеет начальное вращение. Например, мы вручную раскрутили вал однофазного двигателя, одна обмотка которого подключена к сети переменного тока. В этом случае при определенных условиях двигатель будет продолжать развивать вращающий момент, так как скольжение его ротора относительно прямого и обратного магнитного потока будет неодинаковым.
Например, мы вручную раскрутили вал однофазного двигателя, одна обмотка которого подключена к сети переменного тока. В этом случае при определенных условиях двигатель будет продолжать развивать вращающий момент, так как скольжение его ротора относительно прямого и обратного магнитного потока будет неодинаковым.
Будем считать, что прямой магнитный поток Фпр, вращается в направлении вращения ротора, а обратный магнитный поток Фобр — в противоположном направлении. Так как, частота вращения ротора n2 меньше частоты вращения магнитного потока n1, скольжение ротора относительно потока Фпр будет:
,
- где sпр – скольжение ротора относительно прямого магнитного потока,
- n2 – частота вращения ротора, об/мин,
- s – скольжение асинхронного двигателя
Прямой и обратный вращающиеся магнитные потоки вместо пульсирующего магнитного потока
Магнитный поток Фобр вращается встречно ротору, частота вращения ротора n2 относительно этого потока отрицательна, а скольжение ротора относительно Фобр
,
- где sобр – скольжение ротора относительно обратного магнитного потока
Запустить
Остановить
Вращающееся магнитное поле пронизывающее ротор
Ток индуцируемый в роторе переменным магнитным полем
Согласно закону электромагнитной индукции прямой Фпр и обратный Фобр магнитные потоки, создаваемые обмоткой статора, наводят в обмотке ротора ЭДС, которые соответственно создают в короткозамкнутом роторе токи I2пр и I2обр. При этом частота тока в роторе пропорциональна скольжению, следовательно:
При этом частота тока в роторе пропорциональна скольжению, следовательно:
,
- где f2пр – частота тока I2пр наводимого прямым магнитным потоком, Гц
,
- где f2обр – частота тока I2обр наводимого обратным магнитным потоком, Гц
Таким образом, при вращающемся роторе, электрический ток I2обр, наводимый обратным магнитным полем в обмотке ротора, имеет частоту f2обр, намного превышающую частоту f2пр тока ротора I2пр, наведенного прямым полем.
Пример: для однофазного асинхронного двигателя, работающего от сети с частотой f1 = 50 Гц при n1 = 1500 и n2 = 1440 об/мин,
скольжение ротора относительно прямого магнитного потока sпр = 0,04;
частота тока наводимого прямым магнитным потоком f2пр = 2 Гц;
скольжение ротора относительно обратного магнитного потока sобр = 1,96;
частота тока наводимого обратным магнитным потоком f2обр = 98 Гц
Согласно закону Ампера, в результате взаимодействия электрического тока I2пр с магнитным полем Фпр возникает вращающий момент
,
- где Mпр – магнитный момент создаваемый прямым магнитным потоком, Н∙м,
- сM — постоянный коэффициент, определяемый конструкцией двигателя
Электрический ток I2обр, взаимодействуя с магнитным полем Фобр, создает тормозящий момент Мобр, направленный против вращения ротора, то есть встречно моменту Мпр:
,
- где Mобр – магнитный момент создаваемый обратным магнитным потоком, Н∙м
Результирующий вращающий момент, действующий на ротор однофазного асинхронного двигателя,
,
Справка: В следствие того, что во вращающемся роторе прямым и обратным магнитным полем будет наводиться ток разной частоты, моменты сил действующие на ротор в разных направлениях будут не равны. Поэтому ротор будет продолжать вращаться в пульсирующем магнитном поле в том направлении в котором он имел начальное вращение.
Поэтому ротор будет продолжать вращаться в пульсирующем магнитном поле в том направлении в котором он имел начальное вращение.
Тормозящее действие обратного поля
При работе однофазного двигателя в пределах номинальной нагрузки, то есть при небольших значениях скольжения s = sпр, крутящий момент создается в основном за счет момента Мпр. Тормозящее действие момента обратного поля Мобр — незначительно. Это связано с тем, что частота f2обр много больше частоты f2пр, следовательно, индуктивное сопротивление рассеяния обмотки ротора х2обр = x2sобр току I2обр намного больше его активного сопротивления. Поэтому ток I2обр, имеющий большую индуктивную составляющую, оказывает сильное размагничивающее действие на обратный магнитный поток Фобр, значительно ослабляя его.
,
- где r2 — активное сопротивление стержней ротора, Ом,
- x2обр — реактивное сопротивление стержней ротора, Ом.

Если учесть, что коэффициент мощности невелик, то станет, ясно, почему Мобр в режиме нагрузки двигателя не оказывает значительного тормозящего действия на ротор однофазного двигателя.
С помощью одной фазы нельзя запустить ротор
Ротор имеющий начальное вращение будет продолжать вращаться в поле создаваемом однофазным статором
Действие пульсирующего поля на неподвижный ротор
При неподвижном роторе (n2 = 0) скольжение sпр = sобр = 1 и Мпр = Мобр, поэтому начальный пусковой момент однофазного асинхронного двигателя Мп = 0. Для создания пускового момента необходимо привести ротор во вращение в ту или иную сторону. Тогда s ≠ 1, нарушается равенство моментов Мпр и Мобр и результирующий электромагнитный момент приобретает некоторое значение .
Пуск однофазного двигателя. Как создать начальное вращение?
Одним из способов создания пускового момента в однофазном асинхронном двигателе, является расположение вспомогательной (пусковой) обмотки B, смещенной в пространстве относительно главной (рабочей) обмотки A на угол 90 электрических градусов.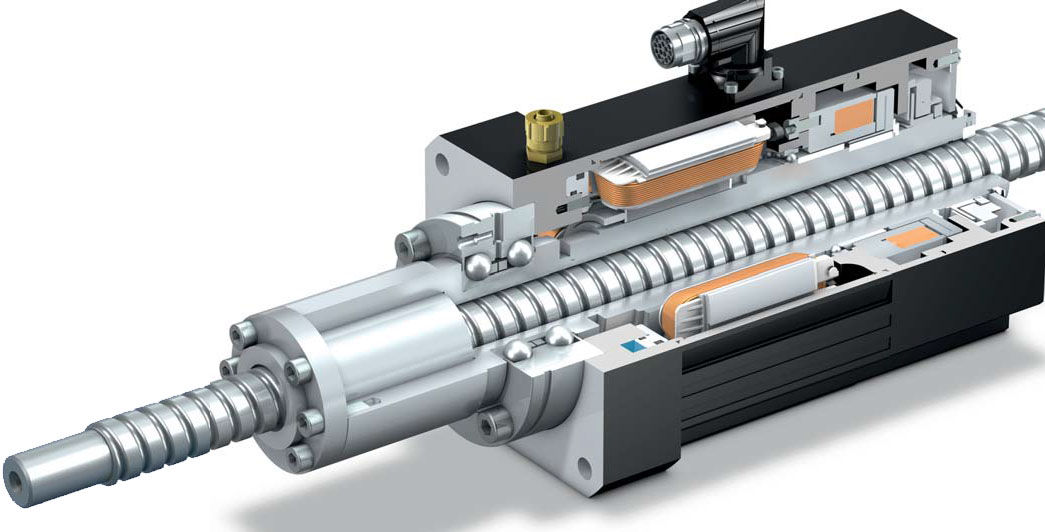 Чтобы обмотки статора создавали вращающееся магнитное поле токи IA и IB в обмотках должны быть сдвинуты по фазе относительно друг друга. Для получения фазового сдвига между токами IA и IB в цепь вспомогательной (пусковой) обмотки В включают фазосмещающий элемент, в качестве которого используют активное сопротивление (резистор), индуктивность (дроссель) или емкость (конденсатор) [1].
Чтобы обмотки статора создавали вращающееся магнитное поле токи IA и IB в обмотках должны быть сдвинуты по фазе относительно друг друга. Для получения фазового сдвига между токами IA и IB в цепь вспомогательной (пусковой) обмотки В включают фазосмещающий элемент, в качестве которого используют активное сопротивление (резистор), индуктивность (дроссель) или емкость (конденсатор) [1].
После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, пусковую обмотку В отключают. Отключение вспомогательной обмотки происходит либо автоматически с помощью центробежного выключателя, реле времени, токового или дифференциального реле, или же вручную с помощью кнопки.
Таким образом, во время пуска двигатель работает как двухфазный, а по окончании пуска — как однофазный.
Подключение однофазного двигателя
С пусковым сопротивлением
Двигатель с расщепленной фазой — однофазный асинхронный двигатель, имеющий на статоре вспомогательную первичную обмотку, смещенную относительно основной, и короткозамкнутый ротор [2].
Однофазный асинхронный двигатель с пусковым сопротивлением — двигатель с расщепленной фазой, у которого цепь вспомогательной обмотки отличается повышенным активным сопротивлением.
Омический сдвиг фаз, биффилярный способ намотки пусковой обмотки
Разное сопротивление и индуктивность обмоток
Для запуска однофазного двигателя можно использовать пусковой резистор, который последовательно подключается к пусковой обмотки. В этом случае можно добиться сдвига фаз в 30° между токами главной и вспомогательной обмотки, которого вполне достаточно для пуска двигателя. В двигателе с пусковым сопротивлением разность фаз объясняется разным комплексным сопротивлением цепей.
Также сдвиг фаз можно создать за счет использования пусковой обмотки с меньшей индуктивностью и более высоким сопротивлением. Для этого пусковая обмотка делается с меньшим количеством витков и с использованием более тонкого провода чем в главной обмотке.
Отечественной промышленностью изготавливается серия однофазных асинхронных электродвигателей с активным сопротивлением в качестве фазосдвигающего элемента серии АОЛБ мощностью от 18 до 600 Вт при синхронной частоте вращения 3000 и 1500 об/мин, предназначенных для включения в сеть напряжением 127, 220 или 380 В, частотой 50 Гц.
С конденсаторным пуском
Двигатель с конденсаторным пуском — двигатель с расщепленной фазой, у которого цепь вспомогательной обмотки с конденсатором включается только на время пуска.
Ёмкостной сдвиг фаз с пусковым конденсатором
Чтобы достичь максимального пускового момента требуется создать круговое вращающееся магнитное поле, для этого требуется чтобы токи в главной и вспомогательной обмотках были сдвинуты друг относительно друга на 90°. Использование в качестве фазосдвигающего элемента резистора или дросселя не позволяет обеспечить требуемый сдвиг фаз. Лишь включение конденсатора определенной емкости позволяет обеспечить фазовый сдвиг 90°.
Среди фазосдвигающих элементов, только конденсатор позволяет добиться наилучших пусковых свойств однофазного асинхронного электродвигателя.
Двигатели в цепь которых постоянно включен конденсатор используют для работы две фазы и называются — конденсаторными. Принцип действия этих двигателей основан на использовании вращающегося магнитного поля.
Двигатель с экранированными полюсами — двигатель с расщепленной фазой, у которого вспомогательная обмотка короткозамкнута.
Статор однофазного асинхронного двигателя с экранированными полюсами обычно имеет явно выраженные полюса. На явно выраженных полюсах статора намотаны катушки однофазной обмотки возбуждения. Каждый полюс статора разделен на две неравные части аксиальным пазом. Меньшую часть полюса охватывает короткозамкнутый виток. Ротор однофазного двигателя с экранированными полюсами — короткозамкнутый в виде «беличьей» клетки.
При включении однофазной обмотки статора в сеть в магнитопроводе двигателя создается пульсирующий магнитный поток. Одна часть которого проходит по неэкранированной Ф’, а другая Ф» — по экранированной части полюса. Поток Ф» наводит в короткозамкнутом витке ЭДС Ek, в результате чего возникает ток Ik отстающий от Ek по фазе из-за индуктивности витка. Ток Ik создает магнитный поток Фk, направленный встречно Ф», создавая результирующий поток в экранированной части полюса Фэ=Ф»+Фk. Таким образом, в двигателе потоки экранированной и неэкранированной частей полюса сдвинуты во времени на некоторый угол.
Таким образом, в двигателе потоки экранированной и неэкранированной частей полюса сдвинуты во времени на некоторый угол.
Пространственный и временной углы сдвига между потоками Фэ и Ф’ создают условия для возникновения в двигателе вращающегося эллиптического магнитного поля, так как Фэ ≠ Ф’.
Пусковые и рабочие свойства рассматриваемого двигателя невысоки. КПД намного ниже, чем у конденсаторных двигателей такой же мощности, что связано со значительными электрическими потерями в короткозамкнутом витке.
Статор такого однофазного двигателя выполняется с ярко выраженными полюсами на не симметричном шихтованном сердечнике. Ротор — короткозамкнутый типа «беличья клетка».
Данный электродвигатель для работы не требует использования фазосдвигающих элементов. Недостатком данного двигателя является низкий КПД.
Основные параметры электродвигателя
Общие параметры для всех электродвигателей
- Момент электродвигателя
- Мощность электродвигателя
- Коэффициент полезного действия
- Номинальная частота вращения
- Момент инерции ротора
- Номинальное напряжение
- Электрическая постоянная времени
- М. М.Кацман. Электрические машины и электропривод автоматических устройств: Учебник для электротехнических специальностей техникумов.- М.: Высш. шк., 1987.
- ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
Библиографический список
 М.Кацман. Электрические машины и электропривод автоматических устройств: Учебник для электротехнических специальностей техникумов.- М.: Высш. шк., 1987.
М.Кацман. Электрические машины и электропривод автоматических устройств: Учебник для электротехнических специальностей техникумов.- М.: Высш. шк., 1987.
Что такое электропривод?
08.15.2019
Что такое электропривод?
Электропривод (часто называемый электрическим контроллером) представляет собой устройство, используемое для управления выходной мощностью двигателя, используемого, например, для создания линейного движения. Привод будет точно управлять выходной мощностью двигателя и реакцией двигателя на управляющий вход.
Что такое электропривод?
Электрический привод (часто называемый электрическим контроллером) представляет собой устройство, используемое для управления выходной мощностью двигателя, используемого, например, для создания линейного движения в электрическом приводе. В нашей статье об электродвигателях мы ссылались на механизм обратной связи от серводвигателя, схематично показанный ниже.
Привод будет точно управлять выходной мощностью двигателя и реакцией двигателя на управляющий вход (установлено n на схеме выше).
Как работает электропривод?
Электроприводы требуют трехфазного питания переменного тока. Входящий источник переменного тока фиксированной частоты выпрямляется для получения сигнала постоянного тока; затем это сглаживается, и схема обеспечивает развязку входного и выходного каскадов, как показано ниже.
Выходной каскад использует двухпереходные транзисторы с изолированным затвором (IGBT), управляемые программным обеспечением, для переключения и обеспечения переменная частота трехфазного переменного тока, подаваемого на двигатель. Чтобы понять выходной каскад более подробно, мы можем обратиться к следующей эквивалентной схеме.
На схеме БТИЗ представлены переключателями с 1 по 6; средний отвод каждого столбца переключателей подключен к отдельной фазе обмоток двигателя. На схеме выключатели 5 и 4 замкнуты, пропуская ток по фазам W и V.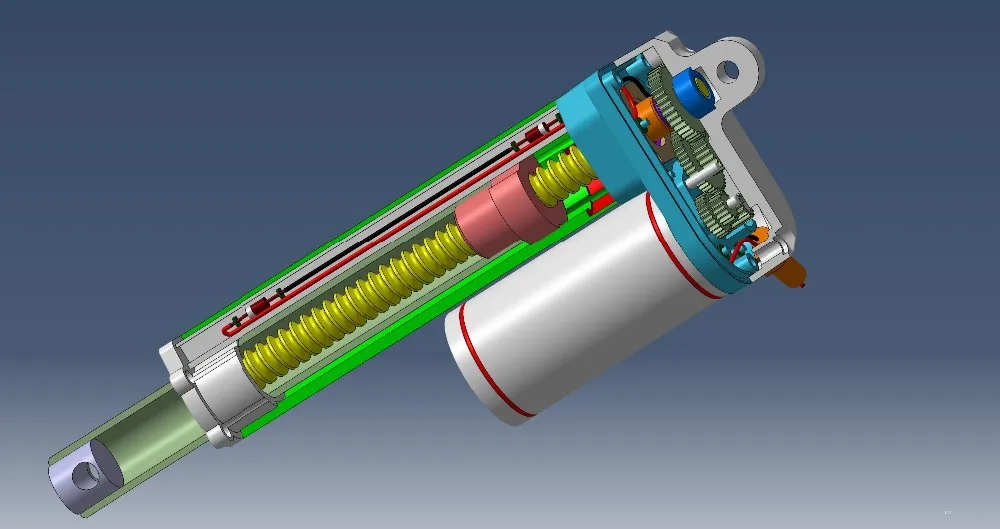 В следующем режиме работы выключатели 5 и 4 могут размыкаться, а 3 и 2 замыкаться; это будет пропускать ток через фазы V и U. Программное обеспечение контролирует последовательное открытие и закрытие переключателей и продолжительность каждого шага; это создает широтно-импульсную модуляцию.
В следующем режиме работы выключатели 5 и 4 могут размыкаться, а 3 и 2 замыкаться; это будет пропускать ток через фазы V и U. Программное обеспечение контролирует последовательное открытие и закрытие переключателей и продолжительность каждого шага; это создает широтно-импульсную модуляцию.
Различная ширина импульса эффективно имитирует форму волны переменного тока, наблюдаемую при нагрузке обмоток двигателя; например, в точке A на приведенной выше диаграмме ширина импульса «0» приведет к нулевому напряжению на обмотках, тогда как в точке B будет приложено максимальное напряжение.
Как выбрать электропривод?
Привод должен обеспечивать питание и управление двигателем, который, в свою очередь, будет соответствовать требованиям приложения.
Напряжение двигателя, номинальная мощность и ток полной нагрузки должны соответствовать друг другу; необходимо учитывать любые требования к перегрузке, например, если для запуска требуется более высокий крутящий момент.
Механизм обратной связи и любые требования к вводу/выводу (I/O) должны быть учтены.
Протоколы связи – например, CANOpen, Profibus и т. д. Следует учитывать рабочую температуру и, следовательно, необходимость вентиляции или принудительного охлаждения.
Типы электрических приводов
Приводы должны управлять двигателями постоянного или переменного тока, последние однофазные или трехфазные. Потребуются разные варианты, в зависимости от упомянутых выше параметров, например, напряжения.
Приводы также можно разделить на одно-, групповые и многодвигательные. Одинарные являются самыми основными и часто используются в бытовой технике; группа подходит для использования в более сложных системах, а мульти используются в тяжелых или многодвигательных приложениях.
Нужно ли мне что-то еще, чтобы электропривод работал?
Кабели потребуются для подачи питания и сигналов управления на двигатель, а также соответствующий источник питания для работы самого привода.
Для защиты рекомендуется иметь предохранители на входе; если электромагнитные помехи представляют собой потенциальную проблему, то в схему можно встроить фильтры. При высоких рабочих температурах потребуется охлаждающий вентилятор с соответствующей вентиляцией.
В зависимости от требований применения доступен динамический тормоз.
Посетите наш раздел «Электрические актуаторы», чтобы узнать больше.
- Вы здесь
- Главная
- Поддержка
- Блог
- Что такое электропривод?
Ассоциация транспорта с электроприводом
Новости электропривода
Компания Tarrytown Honda удостоена награды президента Honda 2022 года
21 апр. 2023 г.
Гражданский гибрид. Внедорожник Honda Prologue, первый массовый аккумуляторный электромобиль Honda, присоединится к линейке в 2024 году.
Хонда производит ……
Новый президент Toyota обещает нажать на педаль электрификации
21 апр. 2023 г.
… работают как часы и получили высокую оценку экспертов-производителей по всему миру. Теперь Toyota предлагает электрический компактный кроссовер bZ4X, укомплектованный ……
BorgWarner инвестирует 20 миллионов долларов в завод по производству зарядных устройств для электромобилей в Мичигане
20 апр. 2023 г.
Проект также расширит возможности компании BorgWarner по быстрой зарядке постоянным током, аккумуляторным модулям для электромобилей и производственным мощностям по производству аккумуляторных батарей для электромобилей в Мичигане….
Детройт вернулся с пропасти. Может ли это быть Остин Среднего Запада?
Может ли это быть Остин Среднего Запада?
20 апр. 2023 г.
Город удвоил свои производственные мощности. «Дженерал Моторс» и «Форд» берутся за дело, имея большие планы на электромобили…
BorgWarner объявляет о плане инвестировать 20 миллионов долларов в объекты в Мичигане, создать 186 рабочих мест
19 апр. 2023 г.
Проект также расширит возможности компании BorgWarner по быстрой зарядке постоянным током, аккумуляторным модулям для электромобилей и производственным мощностям по производству аккумуляторных батарей для электромобилей в Мичигане….
Транспортная ассоциация (EDTA) является торговой ассоциацией, продвигающей аккумуляторы,
гибридные, подключаемые гибридные и электроприводные технологии на топливных элементах, а также
инфраструктура.
