Содержание
Драйвер шагового двигателя A4988 | arduinoLab
Представляет собой модуль драйвера шагового драйвера на основе чипа Allegro A4988 DMOS. Используется стандартный интерфейс (DIR / STEP). Драйвер выполнен в стиле Pololu.
Характеристики:
- Напряжение привода двигателя: 8 — 35 В
- Максимальный ток: до 1 А, кратковременно и с радиатором: до 2 А
- Микрошаг: 1, ½ , ¼, ⅛, 1/16
Простой в использовании интерфейс DIR / Step
Защита от перегрузки по току и термозащита.
Купить:
на Али: тут.
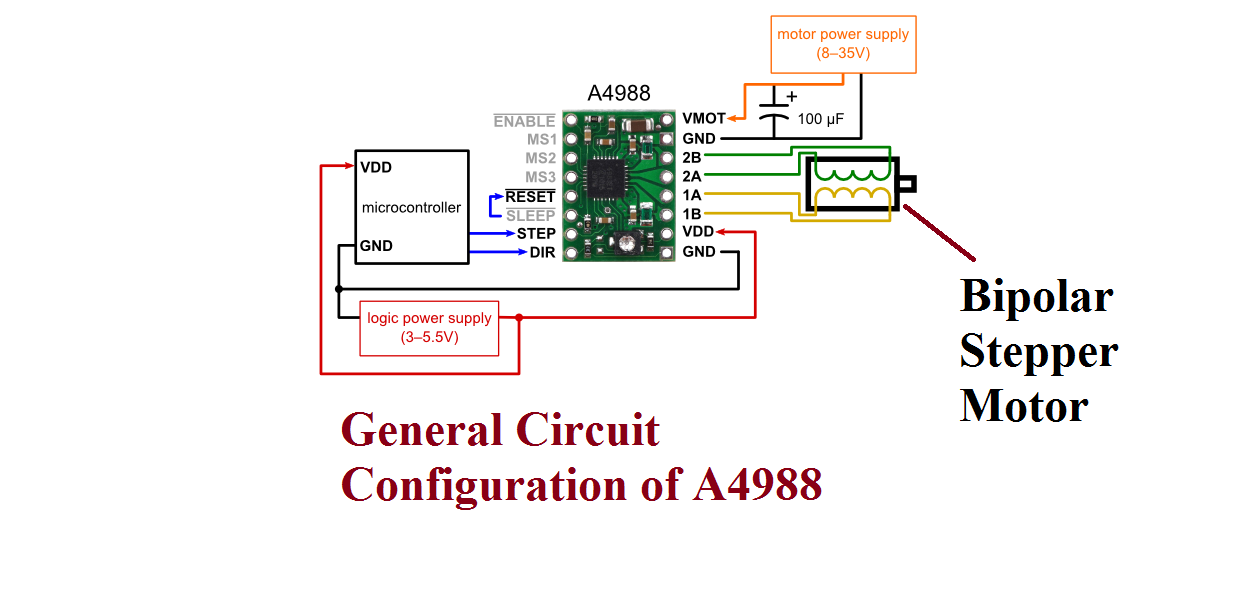
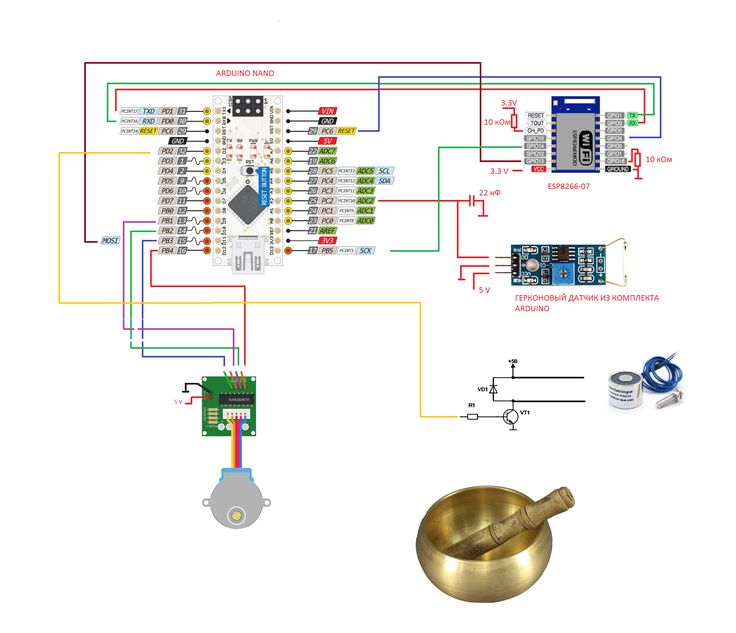
Распиновка и схема подключения:
Назначение выводов драйвера:
- ENABLE – Включение драйвера
- MS1, MS2, MS3 – Служат для установки микрошагового режима работы
- RESET — Сброс, переводит микросхему в исходное состояние.
- SLEEP — Перевод микросхемы в режим низкого энергопотребления, вход отключает большую часть внутренней схемы, включая выходные полевые транзисторы, регулятор тока и тд.
 Выход из режима приводит двигатель к прежнему положению микрошага.
Выход из режима приводит двигатель к прежнему положению микрошага. - STEP — Переход от низкого к высокому в STEP делает один шаг.
- DIR – Задает направление вращения
- VMOT – Питание силовой части микросхемы и двигателя
- GND – Масса
- 2B, 2A, 1A, 1B – Выходы драйвера, подключения обмоток двигателя
- VDD – Питание логической части микросхемы (3.5 –5В)
 Выход из режима приводит двигатель к прежнему положению микрошага.
Выход из режима приводит двигатель к прежнему положению микрошага.Принципиальная схема модуля:
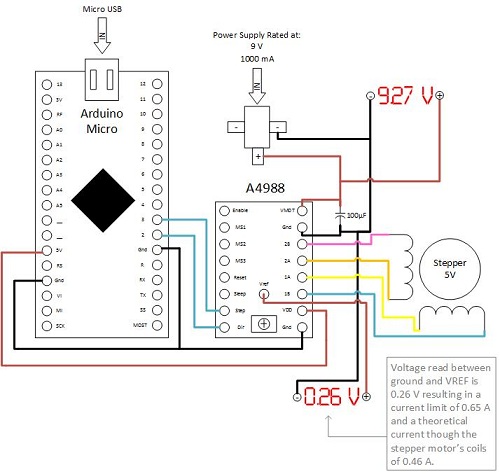
Установка ограничение тока двигателя:
Ограничение тока двигателя устанавливается подстроечным потенциометром на плате. следует подключить вольтметр к выходу VRF (см. картинку выше). Предел можно рассчитать следующим образом: Limit = VREF x 2. Например: если у вас шаговый двигатель рассчитан на 1A, то необходимо установить опорное напряжение равное 0,5 В. При условии что на модуле используется шунт номиналом 0,10 Ом.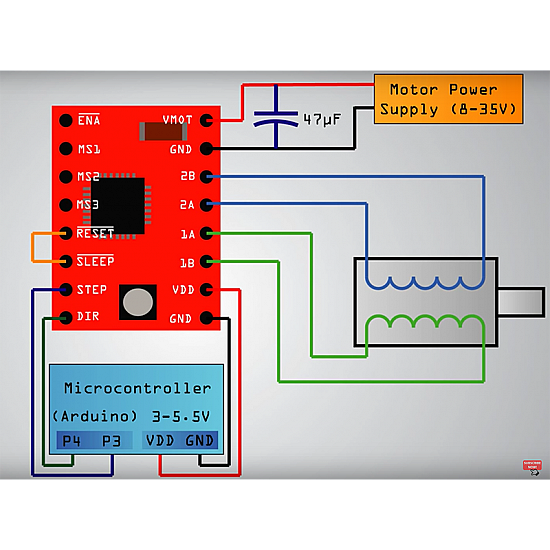
Микро-шаговый режим:
Таблица соответствия ног драйвера и режима микрошага.
| 1 | ½ | ¼ | ⅛ | 1/16 | |
| MS1(M0) | OFF | ON | OFF | ON | OFF |
| MS2(M1) | OFF | OFF | ON | ON | OFF |
| MS3(M2) | OFF | OFF | OFF | OFF | ON |
Видео:
Запись опубликована автором admin в рубрике Обзоры с метками A4988, Драйвер шагового двигателя.
А4988. Драйвер шагового двигателя А4988
А4988 — популярный драйвер для управления шаговыми двигателями. Степпер – мотор, работающий не плавно, а прерывисто, шагами, вращая вал на определенное количество градусов за один шаг. Шаговые электродвигатели бывают одно и двухполярными. В настоящее время практически все выпускаемые – гибридные. Их преимущество в том, что ход их более плавный и точный из-за маленького угла перемещения (обычно 1,8 градуса). Такой маленький ход возможен из-за подачи тока на две соседние катушки одновременно, что позволяет останавливать вал между ними. Используются такие моторы часто в различных приборах: 3D-принтерах, станках с ЧПУ, плоттерах, лазерных граверах и других электронных приборах. Для работы с шаговыми электродвигателями и необходим А4988.
В самом сердце находится микросхема Allegro MicroSystems, DMOS Microsteping с транслятором и защитой от перегрузки током. Это интегрированный контроллер мотора делает взаимодействие с микроконтроллером легким. Требуется лишь два пина, чтобы контролировать и направление движения и скорость.
Требуется лишь два пина, чтобы контролировать и направление движения и скорость.
Рассмотрим основные характеристики. Он имеет максимальную мощность 3,5 В и плюс-минус 2А. Он подходит и для маленьких и средних моторов, но он должен быть биполярным. К примеру, для NEMA 17 он подойдет, а для NEMA 23 лучше брать TB6600. Чип имеет несколько хороших функций безопасности: защита от перегрева и от скачков напряжения. Логическое напряжение – от трех вольт до пяти, что делает его совместимым с самыми популярными платами Arduino. Важной характеристикой является возможность настройки электромотора на микрошаги. Режим может быть целый шаг, одна вторая, одна четвертая, одна восьмая и одна шестнадцатая.
Для подключения и настройки Драйвера А4988 нам потребуются следующие предметы. В первую очередь, сам аппарат и шаговый биполярный двигатель. Платформа Arduino (например, UNO) и комплект проводов для соединения деталей. На самом устройстве 16 входов/выходов, по восемь с каждой стороны.
На одной стороне:
- направление вращения, 1 в одну сторону, 0 в другую.
- шаг, когда на него поступает логическая единица, то устройство вращает вал на один этап. Когда единица сменяется нулем и приходит еще одна единица – совершается еще один этап.
- спящий режим, единственный вывод с логической единицей по умолчанию, если подать ноль, то он заснет.
- сброс, перезагружает его, если на нем логический ноль, поэтому для нормальной работы надо подать сюда 1.
- три пина, задающие скорость. Подключение можно давать на несколько сразу. В зависимости от этих комбинаций будет меняться скорость. Комбинация есть в схеме, поставляемой с прибором.
- выключение.
Вторая сторона:
- масса
- питание цифровой части
- «ноги» для управления электромотором, две фазы.
- масса движка
- его питание
Главное помнить, что все работы производятся только при выключенном приборе!
Если Вы не можете найти схему Вашего степпера, то трудно будет понять, как правильно его подключить.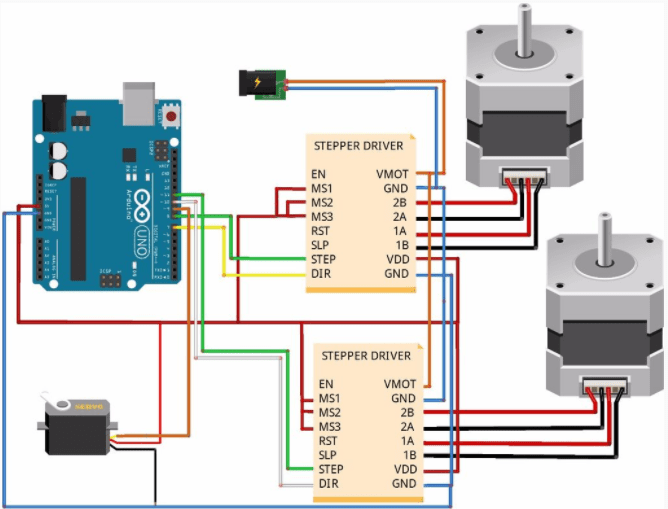 Здесь требуется только определить пары проводов, соединенные с катушками. Есть небольшой трюк, как это сделать. Повращайте вал рукой, почувствуйте силу сопротивления. Возьмите пару проводов и соедините их оголенными концами, опять повращайте вал. Если сопротивление увеличилось, то Вы обнаружили правильную пару из одной катушки, если нет, попробуйте другое сочетание. Так пару от одной катушки подключаем к 1А и 1В, а другую к 2А и 2В, полярность в этом случае значения не имеет.
Здесь требуется только определить пары проводов, соединенные с катушками. Есть небольшой трюк, как это сделать. Повращайте вал рукой, почувствуйте силу сопротивления. Возьмите пару проводов и соедините их оголенными концами, опять повращайте вал. Если сопротивление увеличилось, то Вы обнаружили правильную пару из одной катушки, если нет, попробуйте другое сочетание. Так пару от одной катушки подключаем к 1А и 1В, а другую к 2А и 2В, полярность в этом случае значения не имеет.
Потом подключаем питание движка, обычно оно от 8 до 35 Вольт. Питание драйвера подается отдельно, нужен источник от 3 до 5 Вольт. Подключим его к платформе Arduino, все равно для программирования будем брать именно ее.
Прежде чем начать программировать на Ардуино, не поленитесь сделать одну серьезную вещь. Установите текущий предел тока. Это необходимо для защиты, если этого не сделать, то на двигатель может поступить больше напряжения, что повредит все устройство. На плате для этого есть потенциометр.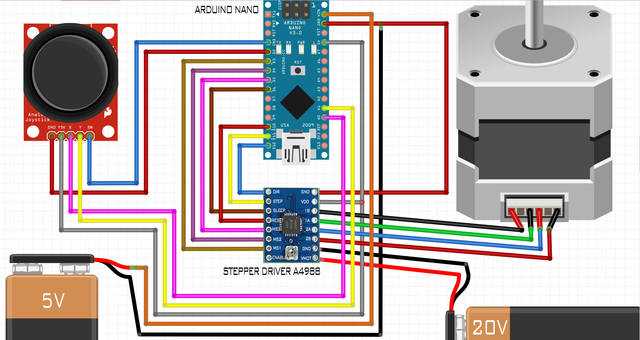 Для расчета возьмем формулу:
Для расчета возьмем формулу:
Vref = Imax × (8 × Rcs)
Imax – ток двигателя, указанный в спецификации. Рассчитанное значение – напряжение, которое должно быть между минусом питания драйвера и самим потенциометром. Крутим его и напряжение меняется. При правильно подобранном напряжении все работает плавно, не пропускаются шаги и достаточно тихо без лишних вибраций.
Не забудьте установить радиатор для охлаждения иначе он может перегреться.
Теперь, когда физически все подключено и предел тока установлен, пришло время подключить Ардуино к компьютеру и задать первый пробный код. Все программное управление происходит с помощью Arduino IDE. Этот софт абсолютно бесплатный и находится в открытом доступе. Скачиваем на свой компьютер программу, запускаем ее, предварительно установив драйвер для платформы, которую Вы использовали при подключении мотора. В случае с самым простым запуском, нет необходимости загружать и использовать библиотеки, достаточно скачать нужный скетч, каких в Интернете предостаточно, вставить свои данные и работа обеспечена.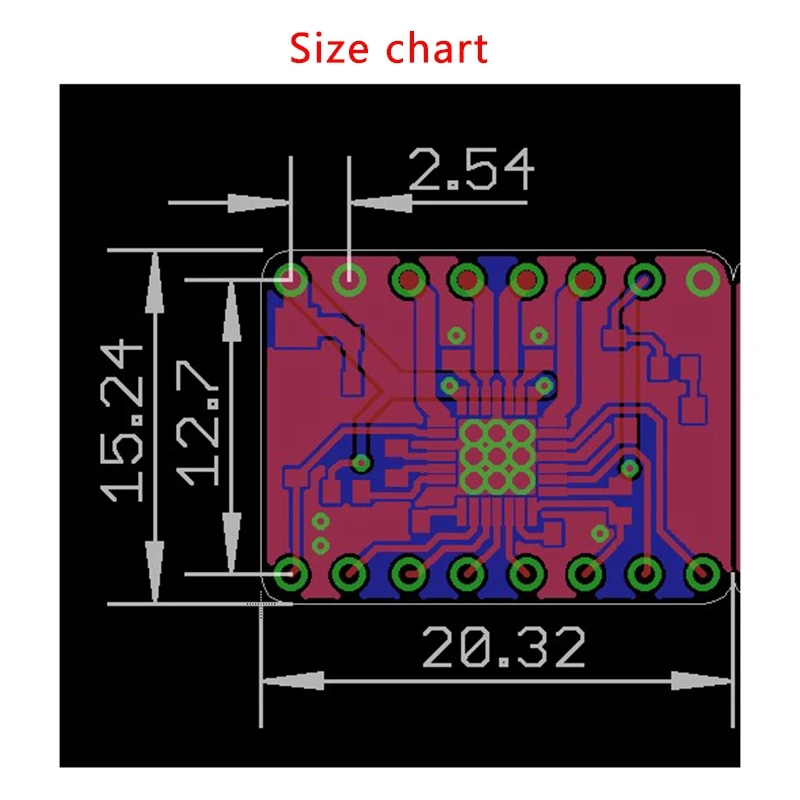
Существуют и очень удобные библиотеки, особенно в англоязычных источниках. Можно посоветовать попробовать свои силы на начальном этапе с библиотекой AccelStepper, написанная Майком Макколи. Одним из преимуществ этой библиотеки является поддержка режимов ускорения и замедления и многие приятные функции.
Шаговые двигатели произвели настоящую революцию в производстве цифровых устройств. Их использование повсеместно, даже начинающему конструктору без них не обойтись. Но любым аппаратом надо управлять. Для данного типа моторов незаменим Драйвер А4988, простой в использовании, совместимый с популярной платформой Arduino и доступный по цене. Простое программное обеспечение, не требующее серьезных знаний языка С++, делает создание цифровых электронных устройств доступным любому.
A4988 Держатель драйвера шагового двигателя (массовый, без штырей разъема)
Это упакованная версия нашего держателя драйвера шагового двигателя A4988, который поставляется без контактных штырей. Пожалуйста, посетите страницу этого продукта для получения дополнительной информации о драйвере.
Пожалуйста, посетите страницу этого продукта для получения дополнительной информации о драйвере.
A4988 драйвер шагового двигателя
Держатель драйвера шагового двигателя A4988, вид сверху
Принципиальная схема шагового двигателя А4988 др…
A4983/A4988 драйвер шагового двигателя с д…
Минимальная электрическая схема для подключения микро…
Предыдущий
Следующий
австралийских долларов
25,95
 «>
«>На складе в Австралии
Доставка от $7.90
Наш код: SKU-003462
Ссылка поставщика: [Pololu MPN: 2975]
Описание
Это упакованная версия нашего держателя драйвера шагового двигателя A4988, который поставляется без штырей; у нас есть совместимые 40-штыревые разъемы с шагом 0,1 дюйма, которые можно приобрести отдельно и разбить на более мелкие части для использования по мере необходимости. Дополнительную информацию о драйвере см. на странице носителя драйвера шагового двигателя A4988.
Эта оптовая версия предназначена для клиентов, заинтересованных в больших объемах при более низких удельных затратах. Мы изготовим их на заказ, а количество, указанное на складе, будет ограничено 10 единицами.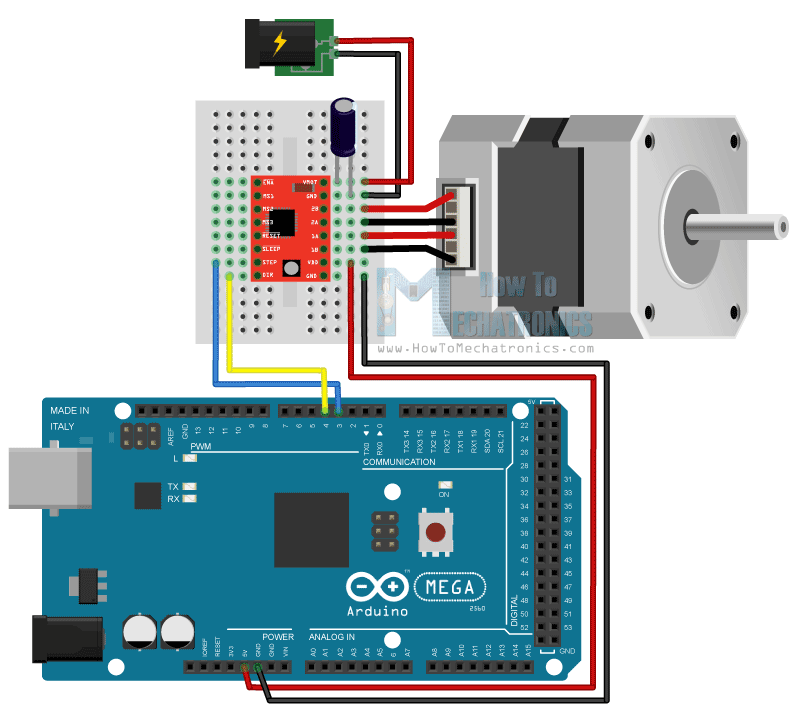 Обычно мы ожидаем, что заказы объемом до нескольких сотен единиц будут отправлены в течение нескольких дней. Для более крупных заказов, пожалуйста, свяжитесь с нами для оценки времени выполнения заказа.
Обычно мы ожидаем, что заказы объемом до нескольких сотен единиц будут отправлены в течение нескольких дней. Для более крупных заказов, пожалуйста, свяжитесь с нами для оценки времени выполнения заказа.
Примечание: Заказы на 500 единиц и более не подлежат отмене и возврату (NCNR) и должны быть предварительно оплачены.
Технические характеристики
Размеры
| Размер: | 0,6″ × 0,8″ |
|---|---|
| Масса: | 1,3 г |
Общие характеристики
| Минимальное рабочее напряжение: | 8 В |
|---|---|
| Максимальное рабочее напряжение: | 35 В |
| Непрерывный ток на фазу: | 1 А 1 |
| Максимальный ток на фазу: | 2 А 2 |
| Минимальное логическое напряжение: | 3 В |
| Максимальное логическое напряжение: | 5,5 В |
| Разрешение микрошага: | полный, 1/2, 1/4, 1/8 и 1/16 |
| Защита от обратного напряжения?: | Н |
| Массовая упаковка: | Д |
| Паяные штырьки: | № 3 |
Примечания:
- 1
- Без радиатора и принудительной вентиляции.
- 2
- С достаточным дополнительным охлаждением.
- 3
- Штифты не включены.

Ресурсы
Загрузка файлов
- Техническое описание драйвера шагового двигателя Allegro A4988 (1MB pdf)
- Габаритная схема держателя драйвера шагового двигателя A4988 (379k pdf)
- А4988 Направляющая для держателя шагового двигателя (33k dxf)
- На этом чертеже в формате DXF показано расположение всех отверстий платы.
Рекомендуемые ссылки
- Видео: настройка ограничения тока на шасси драйверов шаговых двигателей Pololu
- Видео сборки драйвера шагового двигателя Pololu A4988
- Короткое видео, показывающее сборку панели держателей драйверов шаговых двигателей Black Edition A4988 на нашей машине Samsung SM421F для захвата и размещения.
- Модуль драйвера шагового двигателя Pololu A4983/A4988 Kicad
- Пользовательский модуль для использования драйвера драйвера шагового двигателя Pololu A4983/A4988 в Kicad. Джаред Харви, октябрь 2011 г.
 Джаред Харви, октябрь 2011 г.
Джаред Харви, октябрь 2011 г.Часто задаваемые вопросы
- Я хочу управлять таким биполярным шаговым двигателем 3,9 В, 600 мА, но ваш носитель драйвера шагового двигателя A4988 имеет минимальное рабочее напряжение 8 В. Могу ли я использовать этот драйвер, не повреждая шаговый двигатель?
Да. Чтобы не повредить шаговый двигатель, не превышайте номинальное значение 9.0198 ток , что в данном случае составляет 600 мА. Драйверы шагового двигателя A4988 позволяют ограничивать максимальный ток, поэтому, если вы установите предел ниже номинального тока, вы будете в пределах спецификации для вашего двигателя, даже если напряжение превышает номинальное напряжение. Номинальное напряжение — это просто напряжение, при котором каждая катушка потребляет номинальный ток, поэтому катушки вашего шагового двигателя будут потреблять 600 мА при 3,9 В. Используя более высокое напряжение вместе с активным ограничением тока, ток может увеличиваться быстрее.
, что позволяет достичь более высокой частоты шагов, чем при номинальном напряжении.Если вы хотите использовать более низкое напряжение питания двигателя (ниже 8 В) по другим причинам, рассмотрите возможность использования нашего низковольтного шасси драйвера шагового двигателя DRV8834.
- Действительно ли мне нужно установить ограничение тока на моем драйвере шагового двигателя перед его использованием, и если да, то как мне это сделать?
Да, ты знаешь! Установка ограничения тока на держателе драйвера шагового двигателя перед подключением двигателя необходима для обеспечения его правильной работы. Соответствующее ограничение тока также гарантирует, что вашему двигателю не разрешено потреблять больше тока, чем он или ваш драйвер могут выдержать, поскольку это может повредить один или оба из них.
Установка ограничения тока на наших шасси драйверов шаговых двигателей A4988, DRV8825, DRV8824, DRV8834 и DRV8880 осуществляется путем регулировки встроенного потенциометра.
Мы настоятельно рекомендуем использовать мультиметр для измерения напряжения VREF при установке ограничения тока, чтобы вы могли быть уверены, что установили его на подходящее значение (просто поворачивать потенциометр в случайном порядке, пока все не заработает, — не лучший подход). В следующем видео есть более подробная информация о настройке ограничения тока:- Мой А49Драйвер шагового двигателя 88 перегревается, но мой блок питания показывает, что он потребляет значительно меньше 1 А на катушку. Что дает?
Измерение потребляемого тока в источнике питания не обязательно обеспечивает точное измерение тока катушки. Поскольку входное напряжение драйвера может быть значительно выше, чем напряжение катушки, измеренный ток источника питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания очень велико по сравнению с тем, что необходимо двигателю для достижения установленного тока, рабочий цикл будет очень низким, что также приводит к значительным различиям между средним и среднеквадратичным токами: среднеквадратический ток имеет значение для рассеиваемой мощности.
в чипе, но многие блоки питания этого не покажут. Вы должны основывать свою оценку тока катушки на установленном пределе тока или путем измерения фактических токов катушки.Обратите внимание, что хотя микросхема драйвера A4988 способна подавать 2 А на катушку, микросхема сама по себе будет перегреваться при более низких токах. Печатная плата несущей платы помогает отводить тепло от ИС, но мы обнаружили, что обычно требуется радиатор для отвода более 1 А на катушку (несущая плата Black Edition A4988 имеет четырехслойную печатную плату, которая позволяет отводить до около 1,2 А на катушку без радиатора), но это число зависит от таких факторов, как температура окружающей среды и воздушный поток. Например, запайка трех А4988 носителей драйверов в непосредственной близости в небольшой коробке вызовут их перегрев при более низких токах, чем отдельное устройство на открытом воздухе.
- Как подключить шаговый двигатель к шасси драйвера шагового двигателя A4983 или A4988?
Ответ на этот вопрос зависит от типа вашего шагового двигателя.
При работе с шаговыми двигателями вы обычно сталкиваетесь с двумя типами: униполярными шаговыми двигателями и биполярными шаговыми двигателями. Униполярные двигатели имеют две обмотки на фазу, что позволяет изменять направление магнитного поля без необходимости изменять направление тока в катушке, что упрощает управление униполярными двигателями, чем биполярными шаговыми двигателями. Недостатком является то, что только половина фазы несет ток в любой момент времени, что снижает крутящий момент, который вы можете получить от шагового двигателя. Однако, если у вас есть соответствующая схема управления, вы можете увеличить крутящий момент шагового двигателя, используя униполярный шаговый двигатель в качестве биполярного шагового двигателя (примечание: это возможно только с 6- или 8-выводными униполярными шаговыми двигателями, а не с 5-выводными). свинцовые униполярные шаговые двигатели). Униполярные шаговые двигатели обычно имеют пять, шесть или восемь выводов.Биполярные шаговые двигатели
имеют по одной катушке на фазу и требуют более сложной схемы управления (обычно H-моста для каждой фазы).
A4983 и A4988 имеют схему, необходимую для управления биполярным шаговым двигателем. Биполярные шаговые двигатели обычно имеют четыре вывода, по два на каждую катушку.Двухфазный биполярный шаговый двигатель с четырьмя проводами. На приведенной выше схеме показан стандартный биполярный шаговый двигатель. Чтобы контролировать это с помощью A4983 или A4988, подключите провод шагового двигателя A к выходу платы 1A , провод шагового двигателя C к выходу платы 1B , провод шагового двигателя B к выходу платы 2A и шаговый двигатель вывод D к выходу платы 2Б . Дополнительную информацию см. в техническом описании A4983/A4988.
Если у вас униполярный шаговый двигатель с шестью выводами, как показано на схеме ниже:
Двухфазный униполярный шаговый двигатель с шестью выводами. его можно подключить к A4983 или A4988 в качестве биполярного шагового двигателя, выполнив биполярные соединения, описанные в разделе выше, и оставив провода шагового двигателя A’ и B’ отсоединенными.
Эти выводы являются центральными ответвлениями двух катушек и не используются для биполярного режима.Если у вас униполярный шаговый двигатель с восемью выводами, как показано на схеме ниже:
Двухфазный униполярный шаговый двигатель с восемью выводами. у вас есть несколько вариантов подключения. У униполярного шагового двигателя с восемью выводами есть две катушки на фазу, и он дает вам доступ ко всем выводам катушки (в униполярном двигателе с шестью выводами вывод A’ внутренне соединен с C’, а вывод B’ внутренне подключен к Д’). При работе в качестве биполярного шагового двигателя у вас есть возможность использовать две катушки для каждой фазы параллельно или последовательно. При их параллельном использовании вы уменьшаете индуктивность катушки, что может привести к повышению производительности, если у вас есть возможность подавать больший ток. Однако, поскольку A4983 и A4988 активно ограничивают выходной ток на фазу, вы получите только половину фазного тока, протекающего через каждую из двух параллельных катушек.
При их последовательном использовании это похоже на наличие одной катушки на фазу (например, в биполярных шаговых двигателях с четырьмя выводами или униполярных шаговых двигателях с шестью выводами, используемых в качестве биполярных шаговых двигателей). Мы рекомендуем вам использовать последовательное соединение.Для параллельного соединения фазных катушек подключите выводы шагового двигателя A и C’ к выходу платы 1A , выводы шагового двигателя A’ и C к выходу платы 1B , выводы шагового двигателя B и D’ к выходу платы 2A , и выводы шагового двигателя B’ и 9023 8 D на выход платы 2B .
Для последовательного соединения фазных катушек соедините шаговый провод A’ с C’ и шаговый провод B’ с D’ . Выводы шагового двигателя A , C , B и D должны быть подключены к драйверу шагового двигателя как обычно для биполярного шагового двигателя (см.
подключение биполярного шагового двигателя выше).
 , что позволяет достичь более высокой частоты шагов, чем при номинальном напряжении.
, что позволяет достичь более высокой частоты шагов, чем при номинальном напряжении. Мы настоятельно рекомендуем использовать мультиметр для измерения напряжения VREF при установке ограничения тока, чтобы вы могли быть уверены, что установили его на подходящее значение (просто поворачивать потенциометр в случайном порядке, пока все не заработает, — не лучший подход). В следующем видео есть более подробная информация о настройке ограничения тока:
Мы настоятельно рекомендуем использовать мультиметр для измерения напряжения VREF при установке ограничения тока, чтобы вы могли быть уверены, что установили его на подходящее значение (просто поворачивать потенциометр в случайном порядке, пока все не заработает, — не лучший подход). В следующем видео есть более подробная информация о настройке ограничения тока: в чипе, но многие блоки питания этого не покажут. Вы должны основывать свою оценку тока катушки на установленном пределе тока или путем измерения фактических токов катушки.
в чипе, но многие блоки питания этого не покажут. Вы должны основывать свою оценку тока катушки на установленном пределе тока или путем измерения фактических токов катушки.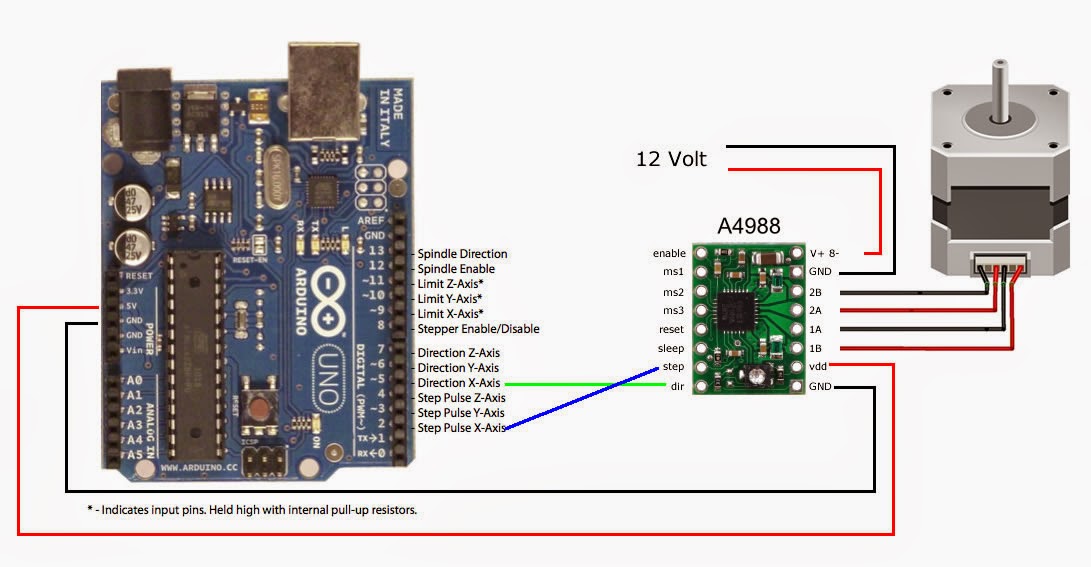 При работе с шаговыми двигателями вы обычно сталкиваетесь с двумя типами: униполярными шаговыми двигателями и биполярными шаговыми двигателями. Униполярные двигатели имеют две обмотки на фазу, что позволяет изменять направление магнитного поля без необходимости изменять направление тока в катушке, что упрощает управление униполярными двигателями, чем биполярными шаговыми двигателями. Недостатком является то, что только половина фазы несет ток в любой момент времени, что снижает крутящий момент, который вы можете получить от шагового двигателя. Однако, если у вас есть соответствующая схема управления, вы можете увеличить крутящий момент шагового двигателя, используя униполярный шаговый двигатель в качестве биполярного шагового двигателя (примечание: это возможно только с 6- или 8-выводными униполярными шаговыми двигателями, а не с 5-выводными). свинцовые униполярные шаговые двигатели). Униполярные шаговые двигатели обычно имеют пять, шесть или восемь выводов.
При работе с шаговыми двигателями вы обычно сталкиваетесь с двумя типами: униполярными шаговыми двигателями и биполярными шаговыми двигателями. Униполярные двигатели имеют две обмотки на фазу, что позволяет изменять направление магнитного поля без необходимости изменять направление тока в катушке, что упрощает управление униполярными двигателями, чем биполярными шаговыми двигателями. Недостатком является то, что только половина фазы несет ток в любой момент времени, что снижает крутящий момент, который вы можете получить от шагового двигателя. Однако, если у вас есть соответствующая схема управления, вы можете увеличить крутящий момент шагового двигателя, используя униполярный шаговый двигатель в качестве биполярного шагового двигателя (примечание: это возможно только с 6- или 8-выводными униполярными шаговыми двигателями, а не с 5-выводными). свинцовые униполярные шаговые двигатели). Униполярные шаговые двигатели обычно имеют пять, шесть или восемь выводов.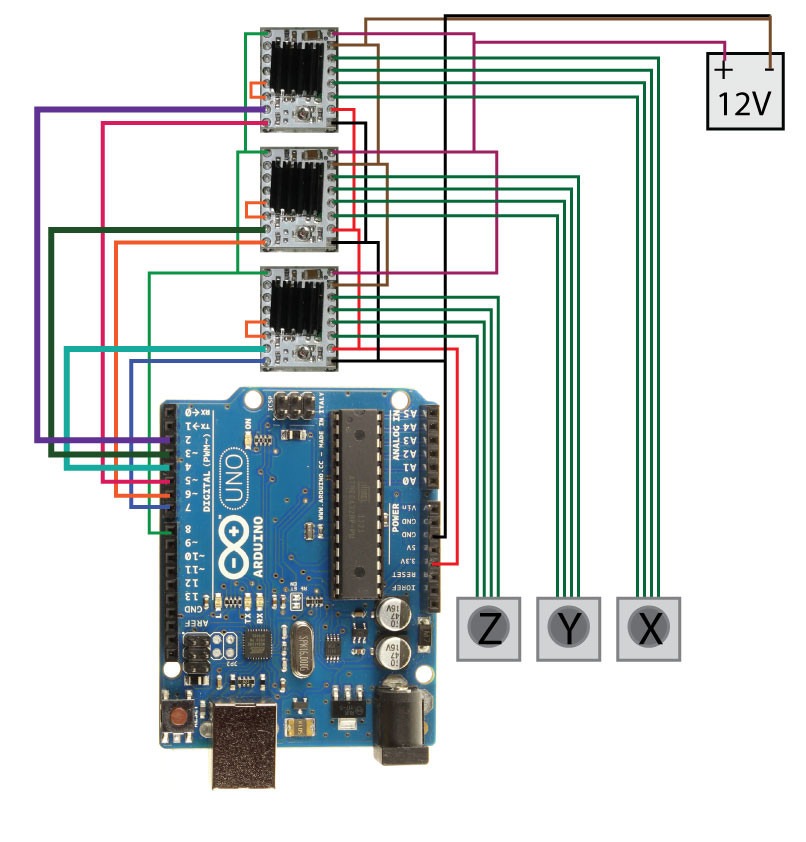 A4983 и A4988 имеют схему, необходимую для управления биполярным шаговым двигателем. Биполярные шаговые двигатели обычно имеют четыре вывода, по два на каждую катушку.
A4983 и A4988 имеют схему, необходимую для управления биполярным шаговым двигателем. Биполярные шаговые двигатели обычно имеют четыре вывода, по два на каждую катушку.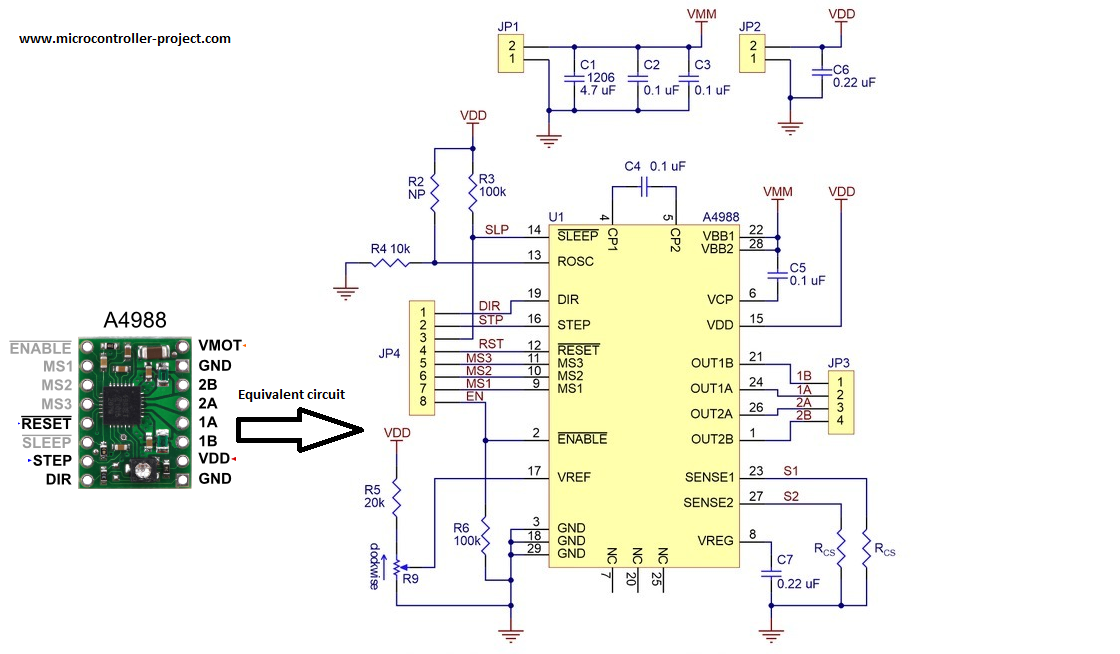 Эти выводы являются центральными ответвлениями двух катушек и не используются для биполярного режима.
Эти выводы являются центральными ответвлениями двух катушек и не используются для биполярного режима.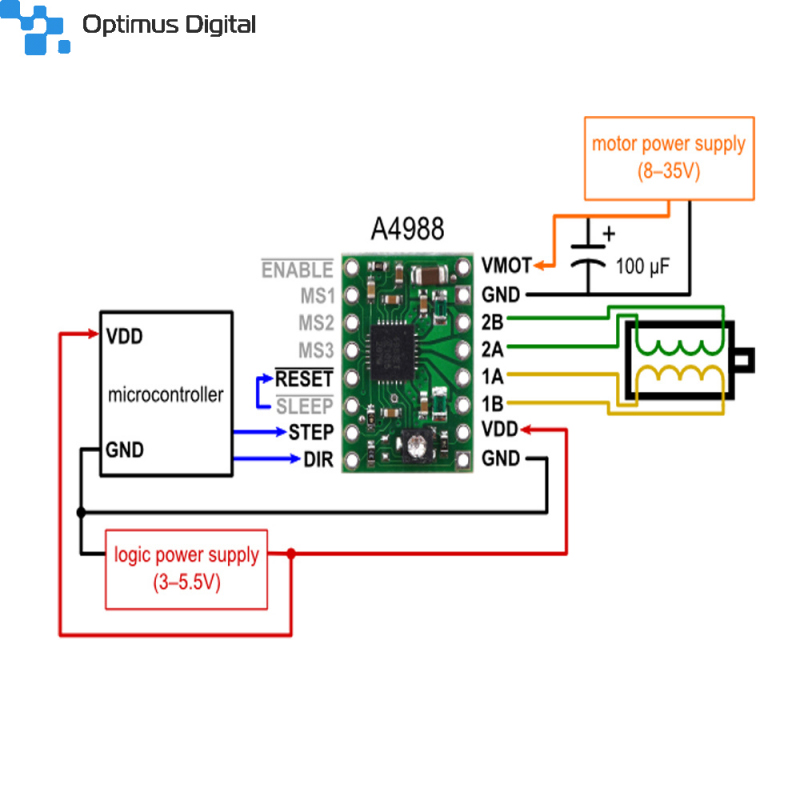 При их последовательном использовании это похоже на наличие одной катушки на фазу (например, в биполярных шаговых двигателях с четырьмя выводами или униполярных шаговых двигателях с шестью выводами, используемых в качестве биполярных шаговых двигателей). Мы рекомендуем вам использовать последовательное соединение.
При их последовательном использовании это похоже на наличие одной катушки на фазу (например, в биполярных шаговых двигателях с четырьмя выводами или униполярных шаговых двигателях с шестью выводами, используемых в качестве биполярных шаговых двигателей). Мы рекомендуем вам использовать последовательное соединение.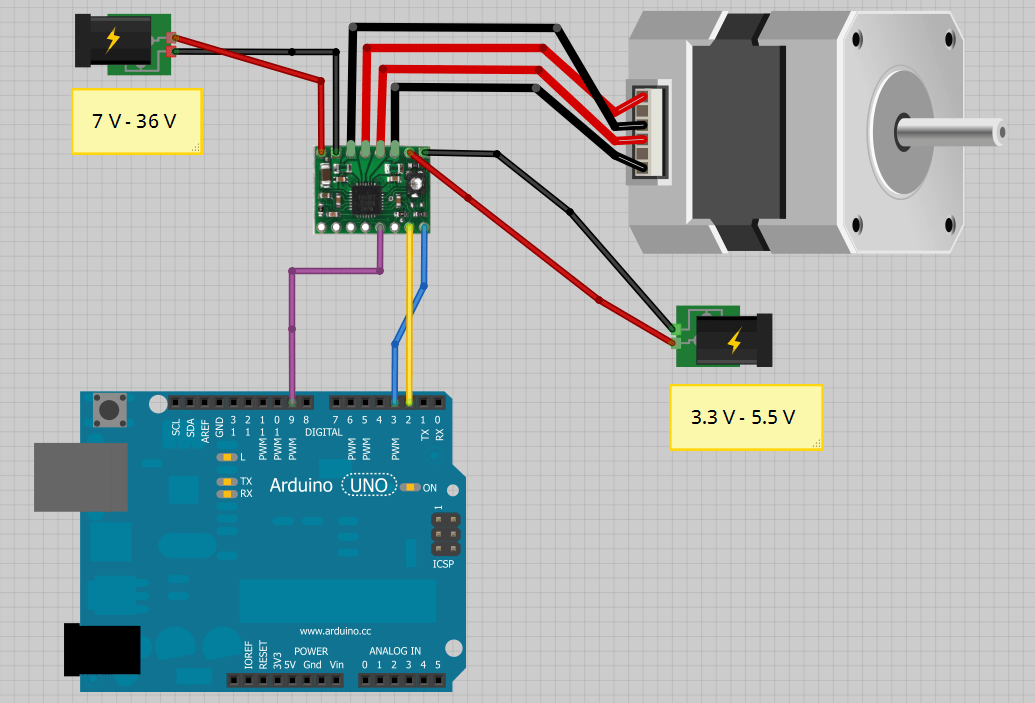 подключение биполярного шагового двигателя выше).
подключение биполярного шагового двигателя выше).Сопутствующие товары
1,55 доллара США
Отрывной штекерный разъем 0,100 дюйма (2,54 мм): 1 × 40-контактный, нержавеющая…
26,95 долларов США
Держатель драйвера шагового двигателя A4988
27,95 долларов США
Держатель драйвера шагового двигателя A4988 (контакты разъема припаяны)
27,95 долларов США
Держатель драйвера шагового двигателя A4988 (масса, штыри разъема припаяны)
24,95 доллара США
Носитель драйвера шагового двигателя A4988, Black Edition (оптом, без .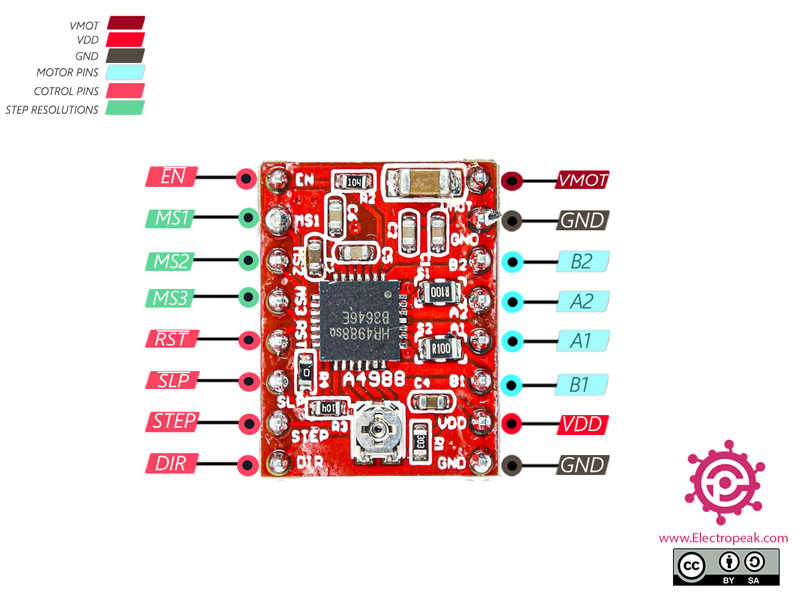 ..
..
$33,95
DRV8825 Держатель драйвера шагового двигателя, сильноточный (объемный, без…
$7,95
Штампованный алюминиевый L-образный кронштейн Pololu для шаговых двигателей NEMA 17
$89,95
Поворотный энкодер — 1024 P/R (квадратурный)
35,95 долларов США
Шаговый двигатель — 68 унций дюйма (400 шагов/об) NEMA 17
17,95 долларов США
Кабельный носитель — 10×15 мм (длина 0,5 м)
2,75 доллара США
Переключатель SPDT мгновенного действия с отбойным рычагом 15,6 мм
4,80 доллара США
Радиатор — большой — подходит для TO-220, TO-218, TO-247
A4988 Держатель драйвера шагового двигателя, черный вариант
Держатель драйвера шагового двигателя A4988, Black Edition, вид снизу с размерами
Обзор
Этот продукт является платой-носителем или платой-разветвителем для микрошагового драйвера Allegro A4988 DMOS с транслятором и защитой от перегрузки по току; поэтому мы рекомендуем внимательно прочитать техническое описание A4988 (1 МБ в формате pdf) перед использованием этого продукта.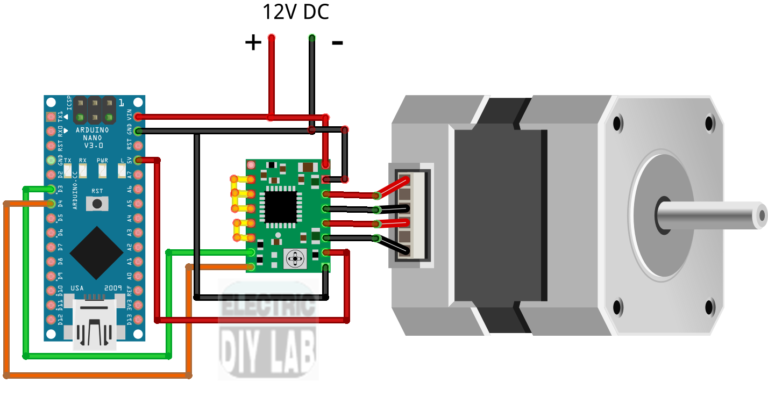 Этот драйвер шагового двигателя позволяет управлять одним биполярным шаговым двигателем с выходным током до 2 А на катушку (дополнительную информацию см. в разделе «Рассеивание мощности » ниже). Вот некоторые из ключевых особенностей драйвера:
Этот драйвер шагового двигателя позволяет управлять одним биполярным шаговым двигателем с выходным током до 2 А на катушку (дополнительную информацию см. в разделе «Рассеивание мощности » ниже). Вот некоторые из ключевых особенностей драйвера:
- Простой интерфейс управления шагом и направлением
- Пять различных разрешений шага: полный шаг, полшага, четверть шага, восьмой шаг и шестнадцатый шаг
- Регулируемое управление током позволяет установить максимальный выходной ток с помощью потенциометра, что позволяет использовать напряжения выше номинального напряжения шагового двигателя для достижения более высокой частоты шагов
- Интеллектуальное управление прерыванием, которое автоматически выбирает правильный текущий режим затухания (быстрое затухание или медленное затухание)
- Тепловое отключение при перегреве, блокировка при пониженном напряжении и защита от перегрузки по току
- Защита от короткого замыкания на землю и нагрузки
- 4-слойная медная печатная плата весом 2 унции для улучшенного рассеивания тепла
- Открытая площадка для пайки заземления под микросхемой драйвера в нижней части печатной платы
Этот продукт поставляется со всеми компонентами для поверхностного монтажа, включая микросхему драйвера A4988, установленными, как показано на изображении продукта.
Этот продукт поставляется в индивидуальной упаковке с 0,1-дюймовыми контактными штырьками, которые входят в комплект, но не припаяны; у нас также есть версия с уже впаянными контактными штырями. Для клиентов, заинтересованных в больших объемах при более низкой удельной стоимости, мы предлагаем версию в упаковке без штырей и версию с установленными штырями.
Black Edition имеет ту же компоновку компонентов и распиновку, что и наш держатель драйвера шагового двигателя A4988, поэтому его можно использовать в качестве более производительной замены в приложениях, разработанных для наших оригинальных драйверов. Black Edition обеспечивает более высокую производительность благодаря своей четырехслойной печатной плате (PCB), которая лучше отводит тепло от драйвера A4988, в то время как наш оригинальный носитель может выдавать примерно до 1 А на фазу в полношаговом режиме без нагрева. раковине или воздушному потоку, Black Edition может выдавать примерно до 1,2 А при тех же условиях.
Обратите внимание, что у нас есть несколько других драйверов шаговых двигателей, которые можно использовать в качестве альтернативы этому модулю (и замены во многих приложениях): дополнительные возможности.
Мы также продаем более крупную версию шасси A4988 с защитой от обратного питания на входе основного питания и встроенными регуляторами напряжения 5 В и 3,3 В, что устраняет необходимость в отдельных источниках питания логики и двигателя.
Некоторыми униполярными шаговыми двигателями (например, с шестью или восемью выводами) этот драйвер может управлять как биполярными шаговыми двигателями.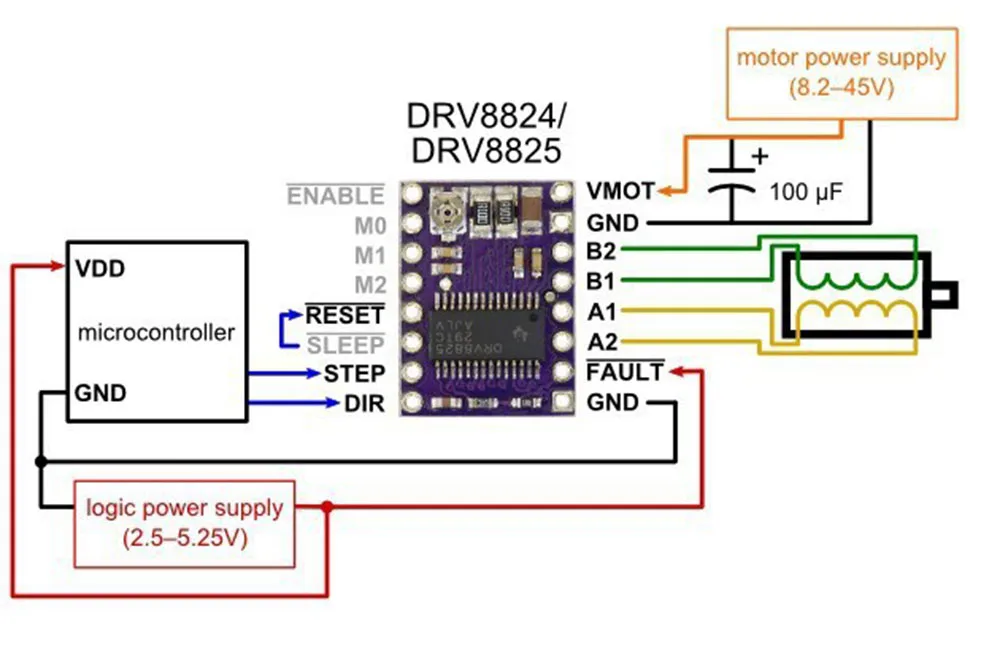 Для получения дополнительной информации см. часто задаваемые вопросы. Униполярные двигатели с пятью выводами не могут использоваться с этим драйвером.
Для получения дополнительной информации см. часто задаваемые вопросы. Униполярные двигатели с пятью выводами не могут использоваться с этим драйвером.
Аппаратное обеспечение в комплекте
Держатель драйвера шагового двигателя A4988 поставляется с одним 1×16-контактным отрывным разъемом 0,1 дюйма. Разъемы можно впаивать для использования с непаянными макетными платами или разъемами 0,1 дюйма. Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате. (Также доступна версия этой платы с уже установленными разъемами.)
Держатель драйвера шагового двигателя A4988, Black Edition, с аппаратными средствами в комплекте | Держатель драйвера шагового двигателя Pololu A4988, Black Edition, с припаянными контактными штырьками |
Использование драйвера
Минимальная схема подключения микроконтроллера к A49Драйвер шагового двигателя 88 (полношаговый режим).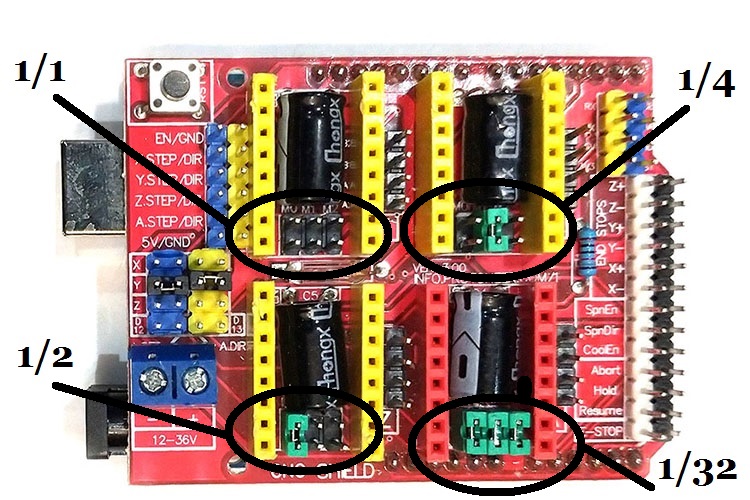 |
|---|
Силовые соединения
Драйверу требуется, чтобы напряжение питания логики (3–5,5 В) было подключено к контактам VDD и GND, а напряжение питания двигателя (8–35 В) должно быть подключено к контактам VMOT и GND. Эти источники питания должны иметь соответствующие развязывающие конденсаторы рядом с платой и должны обеспечивать ожидаемые токи (пики до 4 А для питания двигателя).
Предупреждение: В этой несущей плате используются керамические конденсаторы с низким ESR, что делает ее восприимчивой к разрушительным скачкам напряжения LC, особенно при использовании проводов питания длиннее нескольких дюймов. При правильных условиях эти всплески могут превышать максимальное номинальное напряжение 35 В для A49.88 и необратимо повредить плату, даже если напряжение питания двигателя составляет всего 12 В. Один из способов защитить драйвер от таких всплесков — поставить большой (не менее 47 мкФ) электролитический конденсатор между питанием двигателя (VMOT) и землей.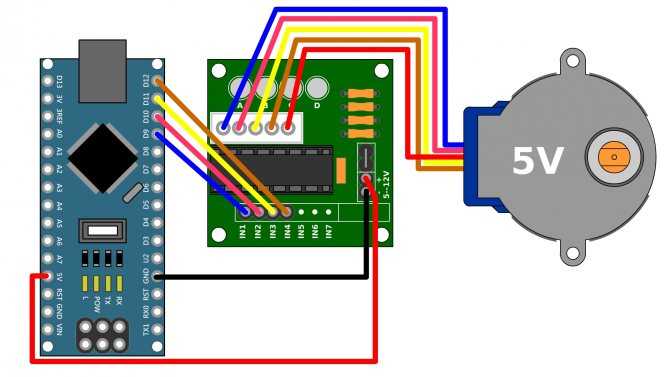 где-то рядом с доской.
где-то рядом с доской.
Соединения двигателей
Четырех-, шести- и восьмипроводные шаговые двигатели могут управляться A4988, если они правильно подключены; Ответ на часто задаваемые вопросы подробно объясняет правильную проводку.
Предупреждение: Подключение или отключение шагового двигателя при включенном драйвере может вывести его из строя. (В более общем смысле, переподключение чего-либо, пока оно находится под напряжением, вызывает проблемы.)
Размер шага (и микрошага)
Шаговые двигатели обычно имеют спецификацию размера шага (например, 1,8° или 200 шагов на оборот), которая относится к полным шагам. Микрошаговый драйвер, такой как A4988, обеспечивает более высокое разрешение, позволяя размещать промежуточные ступени, что достигается за счет питания катушек промежуточными уровнями тока. Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот при использовании четырех различных уровней тока.
Входы селектора разрешения (величины шага) (MS1, MS2 и MS3) позволяют выбрать одно из пяти ступенчатых разрешений в соответствии с таблицей ниже. MS1 и MS3 имеют внутренние подтягивающие резисторы на 100 кОм, а MS2 имеет внутренний подтягивающий резистор на 50 кОм, поэтому отключение этих трех контактов выбора микрошага приводит к полношаговому режиму. Чтобы микрошаговые режимы работали правильно, ограничение тока должно быть установлено достаточно низким (см. ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут правильно поддерживаться, и двигатель будет пропускать микрошаги.
| MS1 | МС2 | МС3 | Разрешение микрошага |
|---|---|---|---|
| Низкий | Низкий | Низкий | Полный шаг |
| Высокий | Низкий | Низкий | Полушаг |
| Низкий | Высокий | Низкий | Четверть шага |
| Высокий | Высокий | Низкий | Восьмой шаг |
| Высокий | Высокий | Высокий | Шестнадцатый шаг |
Входы управления
Каждый импульс на вход STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном выводом DIR. Обратите внимание, что выводы STEP и DIR не подключены к какому-либо определенному внутреннему напряжению, поэтому вы не должны оставлять ни один из этих выводов плавающим в своем приложении. Если вам просто нужно вращение в одном направлении, вы можете напрямую связать DIR с VCC или GND. Микросхема имеет три различных входа для управления многочисленными состояниями питания: RST, SLP и EN. Дополнительные сведения об этих состояниях питания см. в техническом описании. Обратите внимание, что контакт RST является плавающим; если вы не используете контакт, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы перевести его в высокий уровень и включить плату.
Обратите внимание, что выводы STEP и DIR не подключены к какому-либо определенному внутреннему напряжению, поэтому вы не должны оставлять ни один из этих выводов плавающим в своем приложении. Если вам просто нужно вращение в одном направлении, вы можете напрямую связать DIR с VCC или GND. Микросхема имеет три различных входа для управления многочисленными состояниями питания: RST, SLP и EN. Дополнительные сведения об этих состояниях питания см. в техническом описании. Обратите внимание, что контакт RST является плавающим; если вы не используете контакт, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы перевести его в высокий уровень и включить плату.
Ограничение тока
Для достижения высокой скорости шага питание двигателя обычно намного выше, чем это было бы допустимо без активного ограничения тока. Например, типичный шаговый двигатель может иметь максимальный номинальный ток 1 А при сопротивлении катушки 5 Ом, что указывает на максимальное напряжение питания двигателя 5 В.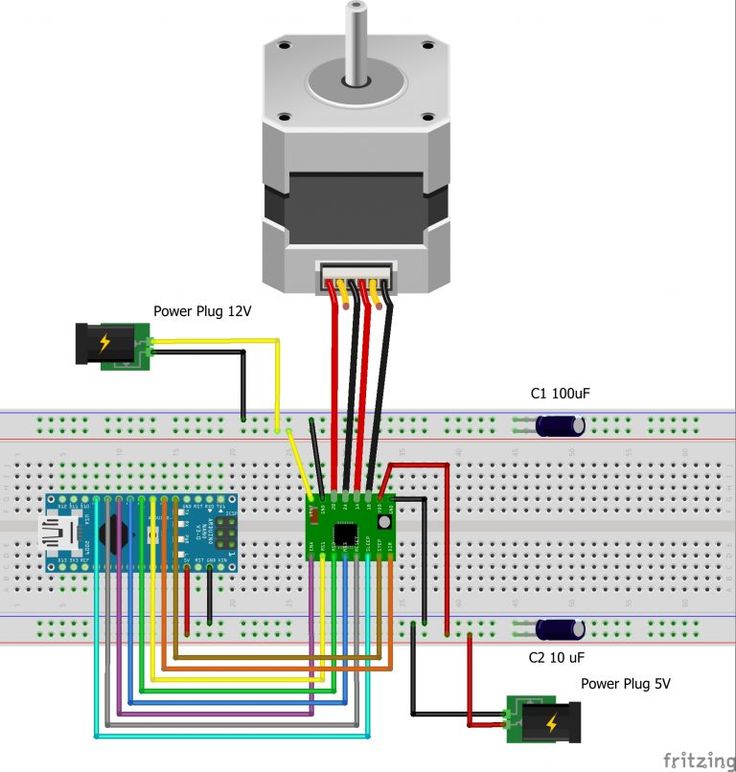 Использование такого двигателя с напряжением 12 В позволит увеличить скорость шага, но ток должен активно ограничивать до 1 А, чтобы предотвратить повреждение двигателя.
Использование такого двигателя с напряжением 12 В позволит увеличить скорость шага, но ток должен активно ограничивать до 1 А, чтобы предотвратить повреждение двигателя.
A4988 поддерживает такое активное ограничение тока, а подстроечный потенциометр на плате можно использовать для установки ограничения тока. Один из способов установить ограничение тока — перевести драйвер в полношаговый режим и измерить ток, протекающий через одну катушку двигателя, без тактирования входа STEP. Измеренный ток будет в 0,7 раза превышать предел тока (поскольку обе катушки всегда включены и ограничены до 70% от установленного предела тока в полношаговом режиме). Обратите внимание, что изменение логического напряжения Vdd на другое значение изменит настройку ограничения тока, поскольку напряжение на выводе «ref» является функцией Vdd.
Другим способом установки ограничения тока является измерение напряжения на контакте «ref» и вычисление результирующего ограничения тока (резисторы измерения тока равны 0,05 Ом). Напряжение опорного вывода доступно через переходное отверстие, обведенное кружком на нижней части печатной платы. Ограничение тока относится к опорному напряжению следующим образом:
Напряжение опорного вывода доступно через переходное отверстие, обведенное кружком на нижней части печатной платы. Ограничение тока относится к опорному напряжению следующим образом:
Предел тока = VREF × 2,5
Так, например, если опорное напряжение равно 0,3 В, ограничение тока равно 0,75 А. Как упоминалось выше, на полном шаге В этом режиме ток через катушки ограничен 70 % от предела тока, поэтому, чтобы получить ток катушки полного шага 1,2 А, предельный ток должен составлять 1,2 А/0,7 = 1,7 А, что соответствует VREF 1,7. A/2,5=0,68 В. См. A49.88 для получения дополнительной информации.
Примечание: Ток катушки может сильно отличаться от тока источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки ограничения тока. Подходящим местом для установки вашего амперметра является последовательное соединение с одной из катушек вашего шагового двигателя.
Соображения по рассеиваемой мощности
ИС драйвера A4988 имеет максимальный номинальный ток 2 А на катушку, но фактический ток, который вы можете обеспечить, зависит от того, насколько хорошо вы можете поддерживать охлаждение ИС.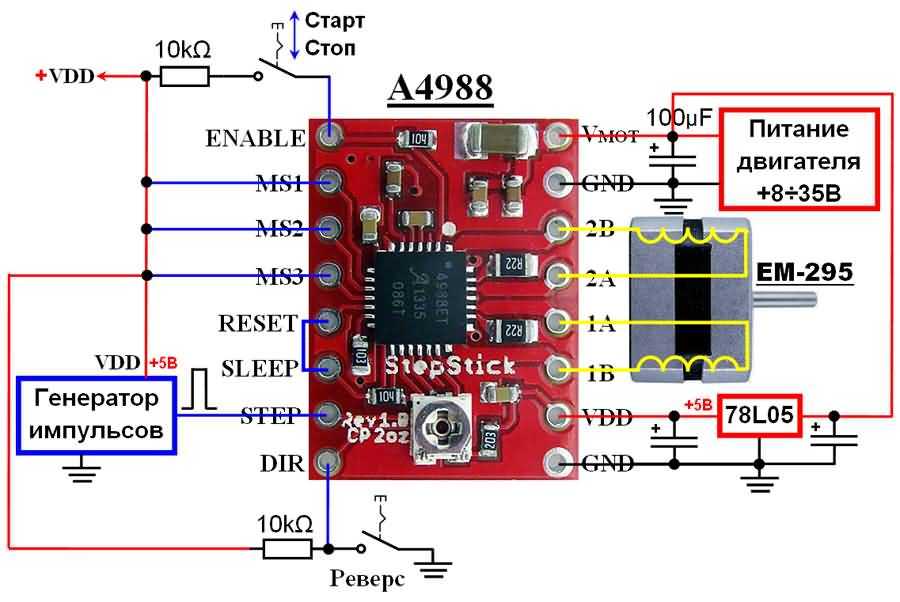 Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более приблизительно 1,2 А на катушку требуется радиатор или другой метод охлаждения (в наших тестах мы смогли обеспечить примерно 1,4 А на катушку). с потоком воздуха от вентилятора ПК и без радиатора).
Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более приблизительно 1,2 А на катушку требуется радиатор или другой метод охлаждения (в наших тестах мы смогли обеспечить примерно 1,4 А на катушку). с потоком воздуха от вентилятора ПК и без радиатора).
Этот продукт может нагреть до такой степени, что обожжется задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Обратите внимание, что измерение потребляемого тока в источнике питания, как правило, не обеспечивает точного измерения тока катушки. Поскольку входное напряжение драйвера может быть значительно выше, чем напряжение катушки, измеренный ток источника питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания очень велико по сравнению с тем, что необходимо двигателю для достижения установленного тока, рабочий цикл будет очень низким, что также приводит к значительным различиям между средним и среднеквадратичным токами.
Схематическая диаграмма
| Схематическая диаграмма держателя драйвера шагового двигателя A4988 (зеленая и черная версии). |
|---|
Примечание: Эта плата является заменой нашего оригинального держателя драйвера шагового двигателя A4988.
Размеры
| Размер: | 0,6″ × 0,8″ |
|---|---|
| Масса: | 1,5 г 1 |
Общие характеристики
| Минимальное рабочее напряжение: | 8 В |
|---|---|
| Максимальное рабочее напряжение: | 35 В |
| Непрерывный ток на фазу: | 1,2 А 2 |
| Максимальный ток на фазу: | 2 А 3 |
| Минимальное логическое напряжение: | 3 В |
| Максимальное логическое напряжение: | 5,5 В |
| Разрешение микрошага: | полный, 1/2, 1/4, 1/8 и 1/16 |
| Защита от обратного напряжения?: | Н |
| Массовая упаковка: | Н |
| Паяные штырьки: | № 4 |
Примечания:
- 1
- Без дополнительных разъемов.
- 2
- Без радиатора и принудительной вентиляции.
- 3
- С достаточным дополнительным охлаждением.
- 4
- Штыревые штифты прилагаются к 16 отверстиям платы, но они не установлены.

- Я хочу управлять биполярным шаговым двигателем 3,9 В, 600 мА, но минимальное рабочее напряжение вашего драйвера A4988 составляет 8 В. Могу ли я использовать этот драйвер, не повреждая шаговый двигатель?
Да. Чтобы не повредить шаговый двигатель, не превышайте номинальное значение 9.0198 ток , что в данном случае составляет 600 мА. Драйверы шагового двигателя A4988 позволяют ограничивать максимальный ток, поэтому, если вы установите предел ниже номинального тока, вы будете в пределах спецификации для вашего двигателя, даже если напряжение превышает номинальное напряжение. Номинальное напряжение — это просто напряжение, при котором каждая катушка потребляет номинальный ток, поэтому катушки вашего шагового двигателя будут потреблять 600 мА при 3,9 В.
Используя более высокое напряжение вместе с активным ограничением тока, ток может увеличиваться быстрее. , что позволяет достичь более высокой частоты шагов, чем при номинальном напряжении.Если вы хотите использовать более низкое напряжение питания двигателя (ниже 8 В) по другим причинам, рассмотрите возможность использования нашего низковольтного шасси драйвера шагового двигателя DRV8834.
- Действительно ли мне нужно установить ограничение тока на моем драйвере шагового двигателя перед его использованием, и если да, то как мне это сделать?
Да, ты знаешь! Установка ограничения тока на держателе драйвера шагового двигателя перед подключением двигателя необходима для обеспечения его правильной работы. Соответствующее ограничение тока также гарантирует, что вашему двигателю не разрешено потреблять больше тока, чем он или ваш драйвер могут выдержать, поскольку это может повредить один или оба из них.
Установка ограничения тока на наших шасси драйверов шаговых двигателей A4988, DRV8825, DRV8824, DRV8834 и DRV8880 осуществляется путем регулировки встроенного потенциометра.
Мы настоятельно рекомендуем использовать мультиметр для измерения напряжения VREF при установке ограничения тока, чтобы вы могли быть уверены, что установили его на подходящее значение (просто поворачивать потенциометр в случайном порядке, пока все не заработает, — не лучший подход). В следующем видео есть более подробная информация о настройке ограничения тока:- Мой А49Драйвер шагового двигателя 88 перегревается, но мой блок питания показывает, что он потребляет значительно меньше 1 А на катушку. Что дает?
Измерение потребляемого тока в источнике питания не обязательно обеспечивает точное измерение тока катушки. Поскольку входное напряжение драйвера может быть значительно выше, чем напряжение катушки, измеренный ток источника питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания очень велико по сравнению с тем, что необходимо двигателю для достижения установленного тока, рабочий цикл будет очень низким, что также приводит к значительным различиям между средним и среднеквадратичным токами: среднеквадратический ток имеет значение для рассеиваемой мощности.
в чипе, но многие блоки питания этого не покажут. Вы должны основывать свою оценку тока катушки на установленном пределе тока или путем измерения фактических токов катушки.Обратите внимание, что хотя микросхема драйвера A4988 способна подавать 2 А на катушку, микросхема сама по себе будет перегреваться при более низких токах. Печатная плата несущей платы помогает отводить тепло от ИС, но мы обнаружили, что обычно требуется радиатор для отвода более 1 А на катушку (несущая плата Black Edition A4988 имеет четырехслойную печатную плату, которая позволяет отводить до около 1,2 А на катушку без радиатора), но это число зависит от таких факторов, как температура окружающей среды и воздушный поток. Например, запайка трех А4988 носителей драйверов в непосредственной близости в небольшой коробке вызовут их перегрев при более низких токах, чем отдельное устройство на открытом воздухе.
- Как подключить шаговый двигатель к шасси драйвера шагового двигателя A4983 или A4988?
Ответ на этот вопрос зависит от типа вашего шагового двигателя.
При работе с шаговыми двигателями вы обычно сталкиваетесь с двумя типами: униполярными шаговыми двигателями и биполярными шаговыми двигателями. Униполярные двигатели имеют две обмотки на фазу, что позволяет изменять направление магнитного поля без необходимости изменять направление тока в катушке, что упрощает управление униполярными двигателями, чем биполярными шаговыми двигателями. Недостатком является то, что только половина фазы несет ток в любой момент времени, что снижает крутящий момент, который вы можете получить от шагового двигателя. Однако, если у вас есть соответствующая схема управления, вы можете увеличить крутящий момент шагового двигателя, используя униполярный шаговый двигатель в качестве биполярного шагового двигателя (примечание: это возможно только с 6- или 8-выводными униполярными шаговыми двигателями, а не с 5-выводными). свинцовые униполярные шаговые двигатели). Униполярные шаговые двигатели обычно имеют пять, шесть или восемь выводов.Биполярные шаговые двигатели
имеют по одной катушке на фазу и требуют более сложной схемы управления (обычно H-моста для каждой фазы).
A4983 и A4988 имеют схему, необходимую для управления биполярным шаговым двигателем. Биполярные шаговые двигатели обычно имеют четыре вывода, по два на каждую катушку.Двухфазный биполярный шаговый двигатель с четырьмя проводами. На приведенной выше схеме показан стандартный биполярный шаговый двигатель. Чтобы контролировать это с помощью A4983 или A4988, подключите провод шагового двигателя A к выходу платы 1A , провод шагового двигателя C к выходу платы 1B , провод шагового двигателя B к выходу платы 2A и шаговый двигатель вывод D к выходу платы 2Б . Дополнительную информацию см. в техническом описании A4983/A4988.
Если у вас униполярный шаговый двигатель с шестью выводами, как показано на схеме ниже:
Двухфазный униполярный шаговый двигатель с шестью выводами. его можно подключить к A4983 или A4988 в качестве биполярного шагового двигателя, выполнив биполярные соединения, описанные в разделе выше, и оставив провода шагового двигателя A’ и B’ отсоединенными.
Эти выводы являются центральными ответвлениями двух катушек и не используются для биполярного режима.Если у вас униполярный шаговый двигатель с восемью выводами, как показано на схеме ниже:
Двухфазный униполярный шаговый двигатель с восемью выводами. у вас есть несколько вариантов подключения. У униполярного шагового двигателя с восемью выводами есть две катушки на фазу, и он дает вам доступ ко всем выводам катушки (в униполярном двигателе с шестью выводами вывод A’ внутренне соединен с C’, а вывод B’ внутренне подключен к Д’). При работе в качестве биполярного шагового двигателя у вас есть возможность использовать две катушки для каждой фазы параллельно или последовательно. При их параллельном использовании вы уменьшаете индуктивность катушки, что может привести к повышению производительности, если у вас есть возможность подавать больший ток. Однако, поскольку A4983 и A4988 активно ограничивают выходной ток на фазу, вы получите только половину фазного тока, протекающего через каждую из двух параллельных катушек.
При их последовательном использовании это похоже на наличие одной катушки на фазу (например, в биполярных шаговых двигателях с четырьмя выводами или униполярных шаговых двигателях с шестью выводами, используемых в качестве биполярных шаговых двигателей). Мы рекомендуем вам использовать последовательное соединение.Для параллельного соединения фазных катушек подключите выводы шагового двигателя A и C’ к выходу платы 1A , выводы шагового двигателя A’ и C к выходу платы 1B , выводы шагового двигателя B и D’ к выходу платы 2A , и выводы шагового двигателя B’ и 9023 8 D на выход платы 2B .
Для последовательного соединения фазных катушек соедините шаговый провод A’ с C’ и шаговый провод B’ с D’ . Выводы шагового двигателя A , C , B и D должны быть подключены к драйверу шагового двигателя как обычно для биполярного шагового двигателя (см.
 Используя более высокое напряжение вместе с активным ограничением тока, ток может увеличиваться быстрее. , что позволяет достичь более высокой частоты шагов, чем при номинальном напряжении.
Используя более высокое напряжение вместе с активным ограничением тока, ток может увеличиваться быстрее. , что позволяет достичь более высокой частоты шагов, чем при номинальном напряжении.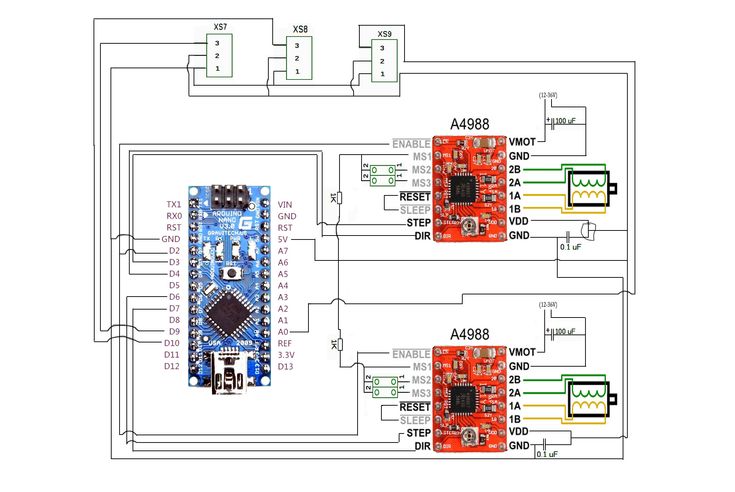 Мы настоятельно рекомендуем использовать мультиметр для измерения напряжения VREF при установке ограничения тока, чтобы вы могли быть уверены, что установили его на подходящее значение (просто поворачивать потенциометр в случайном порядке, пока все не заработает, — не лучший подход). В следующем видео есть более подробная информация о настройке ограничения тока:
Мы настоятельно рекомендуем использовать мультиметр для измерения напряжения VREF при установке ограничения тока, чтобы вы могли быть уверены, что установили его на подходящее значение (просто поворачивать потенциометр в случайном порядке, пока все не заработает, — не лучший подход). В следующем видео есть более подробная информация о настройке ограничения тока: в чипе, но многие блоки питания этого не покажут. Вы должны основывать свою оценку тока катушки на установленном пределе тока или путем измерения фактических токов катушки.
в чипе, но многие блоки питания этого не покажут. Вы должны основывать свою оценку тока катушки на установленном пределе тока или путем измерения фактических токов катушки. При работе с шаговыми двигателями вы обычно сталкиваетесь с двумя типами: униполярными шаговыми двигателями и биполярными шаговыми двигателями. Униполярные двигатели имеют две обмотки на фазу, что позволяет изменять направление магнитного поля без необходимости изменять направление тока в катушке, что упрощает управление униполярными двигателями, чем биполярными шаговыми двигателями. Недостатком является то, что только половина фазы несет ток в любой момент времени, что снижает крутящий момент, который вы можете получить от шагового двигателя. Однако, если у вас есть соответствующая схема управления, вы можете увеличить крутящий момент шагового двигателя, используя униполярный шаговый двигатель в качестве биполярного шагового двигателя (примечание: это возможно только с 6- или 8-выводными униполярными шаговыми двигателями, а не с 5-выводными). свинцовые униполярные шаговые двигатели). Униполярные шаговые двигатели обычно имеют пять, шесть или восемь выводов.
При работе с шаговыми двигателями вы обычно сталкиваетесь с двумя типами: униполярными шаговыми двигателями и биполярными шаговыми двигателями. Униполярные двигатели имеют две обмотки на фазу, что позволяет изменять направление магнитного поля без необходимости изменять направление тока в катушке, что упрощает управление униполярными двигателями, чем биполярными шаговыми двигателями. Недостатком является то, что только половина фазы несет ток в любой момент времени, что снижает крутящий момент, который вы можете получить от шагового двигателя. Однако, если у вас есть соответствующая схема управления, вы можете увеличить крутящий момент шагового двигателя, используя униполярный шаговый двигатель в качестве биполярного шагового двигателя (примечание: это возможно только с 6- или 8-выводными униполярными шаговыми двигателями, а не с 5-выводными). свинцовые униполярные шаговые двигатели). Униполярные шаговые двигатели обычно имеют пять, шесть или восемь выводов.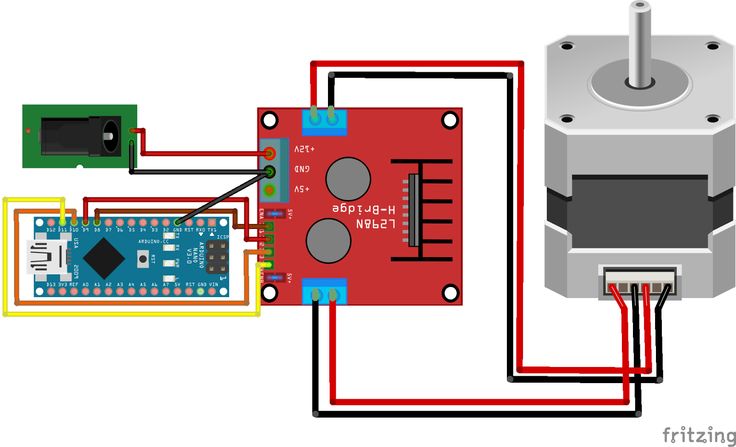 A4983 и A4988 имеют схему, необходимую для управления биполярным шаговым двигателем. Биполярные шаговые двигатели обычно имеют четыре вывода, по два на каждую катушку.
A4983 и A4988 имеют схему, необходимую для управления биполярным шаговым двигателем. Биполярные шаговые двигатели обычно имеют четыре вывода, по два на каждую катушку. Эти выводы являются центральными ответвлениями двух катушек и не используются для биполярного режима.
Эти выводы являются центральными ответвлениями двух катушек и не используются для биполярного режима.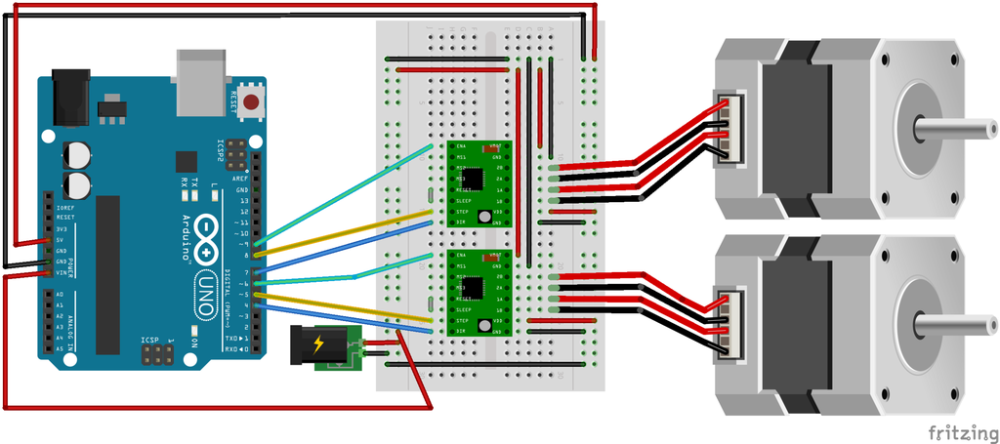 При их последовательном использовании это похоже на наличие одной катушки на фазу (например, в биполярных шаговых двигателях с четырьмя выводами или униполярных шаговых двигателях с шестью выводами, используемых в качестве биполярных шаговых двигателей). Мы рекомендуем вам использовать последовательное соединение.
При их последовательном использовании это похоже на наличие одной катушки на фазу (например, в биполярных шаговых двигателях с четырьмя выводами или униполярных шаговых двигателях с шестью выводами, используемых в качестве биполярных шаговых двигателей). Мы рекомендуем вам использовать последовательное соединение.