Содержание
Всё о трёхфазной системе электроснабжения
Трёхфазная система электроснабжения — частный случай многофазных систем электрических цепей переменного тока, в которых действуют созданные общим источником синусоидальные ЭДС одинаковой частоты, сдвинутые друг относительно друга во времени на определённый фазовый угол.
Один из вариантов многофазной системы электроснабжения — трехфазная система переменного тока. В ней действуют три гармонические ЭДС одной частоты, создаваемые одним общим источником напряжения. Данные ЭДС сдвинуты по отношению друг к другу во времени (по фазе) на один и тот же фазовый угол, равный 120 градусов или 2*пи/3 радиан.
Первым изобретателем шестипроводной трехфазной системы был Никола Тесла, однако немалый вклад в ее развитие внес и российский физик-изобретатель Михаил Осипович Доливо-Добровольский, предложивший использовать всего три или четыре провода, что дало значительные преимущества, и было наглядно продемонстрировано в экспериментах с асинхронными электродвигателями.
В трехфазной системе переменного тока каждая синусоидальная ЭДС находится в собственной фазе, участвуя в непрерывном периодическом процессе электризации сети, поэтому данные ЭДС иногда именуют просто «фазами», как и передающие данные ЭДС проводники: первая фаза, вторая фаза, третья фаза. Фазы сдвинуты друг относительно друга на 120 градусов, а соответствующие проводники принято обозначать латинскими буквами L1, L2, L3 или A, B, C.
Такая система очень экономична, когда речь идет о передаче электрической энергии по проводам на большие расстояния. Трехфазные трансформаторы менее материалоемки.
Силовые кабели требуют меньше проводящего металла (как правило используется медь), поскольку токи в фазных проводниках, по сравнению с однофазными, имеют меньшие действующие величины, если сравнивать с однофазными цепями аналогичной передаваемой мощности.
Трехфазная система очень уравновешена, и оказывает равномерную механическую нагрузку на энергогенерирующую установку (генератор электростанции), чем продлевает срок ее службы.
При помощи трехфазных токов, пропускаемых через обмотки электрических потребителей — различных установок и двигателей, легко получить вращающееся вихревое магнитное поле, необходимое для работы двигателей и других электроприборов.
Синхронные и асинхронные трехфазные двигатели переменного тока имеют простое устройство, и гораздо экономичнее однофазных и двухфазных, а тем более — классических двигателей постоянного тока.
С трехфазной сетью в одной установке можно получить сразу два рабочих напряжения — линейное и фазное, что позволяет иметь два уровня мощности в зависимости от схемы соединения обмоток — «треугольник» (англоязычный вариант «дельта») или «звезда».
Что касается питания систем освещения, то присоединив три группы ламп — к различным фазам сети каждую, — можно значительно снизить мерцание и избавиться от вредного стробоскопического эффекта.
Перечисленные преимущества как раз и обуславливают широкое применение именно трехфазной системы электроснабжения в большой мировой электроэнергетике сегодняшнего дня.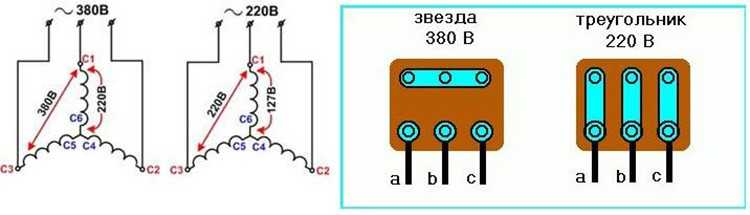
Звезда
Соединение по схеме «звезда» предполагает соединение концов фазных обмоток генератора в одну общую «нейтральную» точку (нейтраль — N), как и концов фазных выводов потребителя.
Провода, соединяющие фазы потребителя с соответствующими фазами генератора называются в трехфазной сети линейными проводами. А провод, соединяющий между собой нейтрали генератора и потребителя — нейтральным проводом (обознаяается «N»).
При наличии нейтрали, трехфазная сеть получается четырехпроводной, а если нейтраль отсутствует — трехпроводной. В условиях, когда сопротивления в трех фазах потребителя равны друг другу, то есть при условии что Za = Zb = Zc, нагрузка будет симметричной. Это идеальный режим работы для трехфазной сети.
При наличии нейтрали, фазными называются напряжения между любым фазным проводом и нейтральным проводом. А напряжения между любыми двумя фазными проводами именуются линейными напряжениями.
Если сеть имеет схему соединения «звезда», то в условиях симметричной нагрузки соотношения между фазными и линейными токами и напряжениями могут быть описаны следующими соотношениями:
Видно, что линейные напряжения сдвинуты по отношению к соответствующим фазным на угол в 30 градусов (пи/6 радиан):
Мощность при соединении «звезда» в условиях симметричной нагрузки, с учетом известных фазных напряжений можно определить по формуле:
О важности нейтрали и «перекосе фаз»
Хотя при абсолютно симметричной нагрузке питание потребителей возможно по трем проводам линейными напряжениями даже в отсутствие нейтрали, тем не менее если нагрузки на фазах не строго симметричны, нейтраль всегда обязательна.
Если же при несимметричной нагрузке нейтральный провод оборвется, либо его сопротивление по какой-то причине значительно возрастет, произойдет «перекос фаз», и тогда нагрузки на трех фазах могут оказаться под разными напряжениями — от нуля до линейного — в зависимости от распределения сопротивлений нагрузок по фазам в момент обрыва нейтрали.
А ведь нагрузки номинально рассчитаны строго на фазные напряжения, значит что-то может выйти из строя. Особенно перекос фаз опасен для бытовой техники и электроники, поскольку из-за этого может не просто перегореть какой-нибудь прибор, но и случиться пожар.
Проблема гармоник кратных третьей
Наиболее часто бытовая и другая техника оснащается сегодня импульсными блоками питания, причем без встроенной схемы коррекции коэффициента мощности. Это значит, что моменты потребления ограничиваются тонкими импульсными пиками тока вблизи вершины сетевой синусоиды, когда конденсатор выходного фильтра, установленный после выпрямителя, резко и быстро подзаряжается.
Когда таких потребителей к сети подключено много, возникает высокий ток третьей гармоники основной частоты питающего напряжения. Данные токи гармоник (кратных третьей) суммируются в нейтральном проводнике и способны перегрузить его, несмотря на то, что на каждой из фаз потребляемая мощность не превышает допустимой.
Проблема особенно актуальна в офисных зданиях, где размещено на небольшом пространстве много разной оргтехники. Если бы во всех встроенных импульсных блоках питания имелись схемы коррекции коэффициента мощности, это бы решило проблему.
Треугольник
Соединение по схеме «треугольник» предполагает со стороны генератора соединение конца проводника первой фазы с началом проводника второй фазы, конца проводника второй фазы с началом проводника третьей фазы, конца проводника третьей фазы с началом проводника первой фазы — получается замкнутая фигура — треугольник.
Линейные и фазные напряжения и токи при симметричной нагрузке, применительно к соединению «треугольник», соотносятся следующим образом:
Мощность в трехфазной цепи при соединении треугольником, в условиях симметричной нагрузки, определяется следующим образом:
В нижеприведенной таблице отражены стандарты фазных и линейных напряжений для разных стран:
Проводники разных фаз трехфазной сети, а также нейтральные и защитные проводники традиционно маркируют собственными цветами.
Так поступают для того, чтобы предотвратить поражение электрическим током и обеспечить удобство обслуживания сетей, облегчить их монтаж и ремонт, а также сделать стандартизированной маркировку фазировки оборудования: порядок чередования фаз порой очень важен, например для задания направления вращения асинхронного двигателя, режима работы управляемого трехфазного выпрямителя и т. д. В разных странах цветовая маркировка различна, в некоторых совпадает.
Ранее ЭлектроВести писали, что немецкая энергетическая компания E.ON подписала контракт с производителем автомобилей BMW на установку и эксплуатацию одной из крупнейших сетей зарядки электромобилей в Германии, которая будет включать более 4,1 тыс. новых зарядных станций.
По материалам: electrik.info.
Управление бесколлекторным двигателем по сигналам обратной ЭДС – понимание процесса
Когда я начал разрабатывать блок управления бесколлекторным двигателем (мотор-колесом), было много вопросов о том, как сопоставить реальный двигатель с абстрактной схемой из трех обмоток и магнитов, на которой, как правило, все объясняют принцип управления бесколлекторными двигателями.
Когда я реализовал управление по датчикам Холла я еще не очень понимал, что происходит в двигателе дальше абстрактных трех обмоток и двух полюсов: почему 120 градусов и почему алгоритм управления именно такой.
Все встало на место, когда я начал разбираться в идее бездатчикового управления бесколлекторным двигателем — понимание процесса, происходящего в реальной железке, помогло разработать аппаратную часть и понять алгоритм управления.
Ниже я постараюсь расписать свой путь к пониманию принципа управления бесколлекторным двигателем постоянного тока.
Для работы бесколлекторного двигателя необходимо чтобы постоянное магнитное поле ротора увлекалось за вращающемся электромагнитным полем статора, как и в обычном ДПТ.
Вращение магнитного поля статора осуществляется коммутацией обмоток с помощью электронного блока управления.
Конструкция бесколлекторного двигателя схожа с конструкцией синхронного двигателя, если подключить бесколлекторный двигатель в трехфазную сеть переменного тока, удовлетворяющую электрическим параметрам двигателя, он будет работать.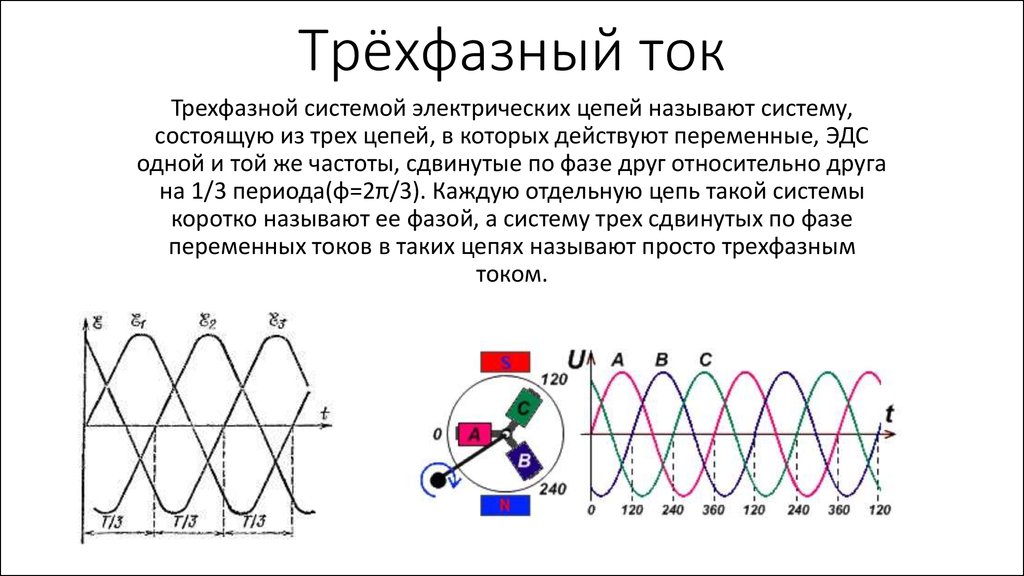
Определенная коммутация обмоток бесколлекторного двигателя позволяет управлять им от источника постоянного тока. Чтобы понять, как составить таблицу коммутаций бесколлекторного двигателя необходимо рассмотреть управление синхронной машиной переменного тока.
Синхронная машина
Синхронная машина управляется от трехфазной сети переменного тока. Двигатель имеет 3 электрические обмотки, смещенные между собой на 120 электрических градусов.
Запустив трехфазный двигатель в генераторном режиме, постоянным магнитным полем будет наводиться ЭДС на каждую из обмоток двигателя, обмотки двигателя распределены равномерно, на каждую из фаз будет наводиться синусоидальное напряжение и данные сигналы будут смещены между собой на 1/3 периода (рисунок 1). Форма ЭДС меняется по синусоидальному закону, период синусоиды равен 2П(360), поскольку мы имеем дело с электрическими величинами (ЭДС, напряжение, ток) назовем это электрическими градусами и будем измерять период в них.
При подаче на двигатель трехфазного напряжения в каждый момент времени на каждой обмотке будет некое значение силы тока.
Рисунок 1. Вид сигнала трехфазного источника переменного тока.
Каждая обмотка формирует вектор магнитного поля пропорциональный току на обмотке. Сложив 3 вектора можно получить результирующий вектор магнитного поля. Так как с течением времени ток на обмотках двигателя меняется по синусоидальному закону, меняется величина вектора магнитного поля каждой обмотки, а результирующий суммарный вектор меняет угол поворота, при этом величина данного вектора остается постоянной.
Рисунок 2. Один электрический период трехфазного двигателя.
На рисунке 2 изображен один электрический период трехфазного двигателя, на данном периоде обозначено 3 произвольных момента, чтобы построить в каждом из этих моментов вектора магнитного поля отложим данный период, 360 электрических градусов, на окружности. Разместим 3 обмотки двигателя сдвинутые на 120 электрических градусов относительно друг друга (рисунок 3).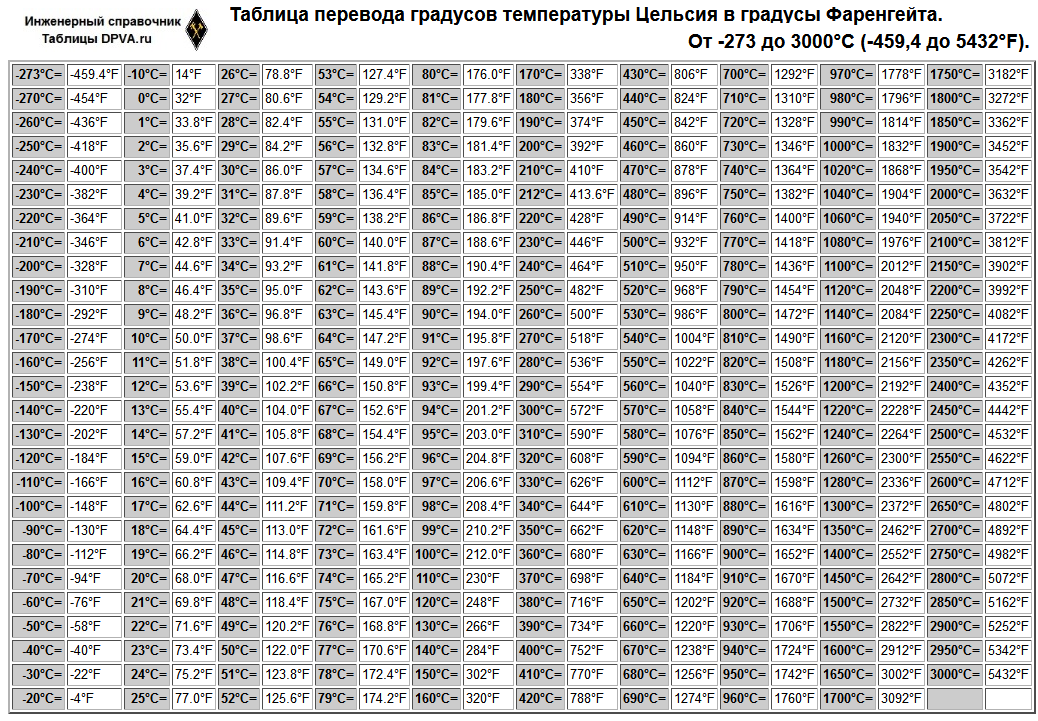
Рисунок 3. Момент 1. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Вдоль каждой из фаз построен вектор магнитного поля, создаваемый обмоткой двигателя. Направление вектора определяется направлением постоянного тока в обмотке, если напряжение, прикладываемое к обмотке положительно, то вектор направлен в противоположную сторону от обмотки, если отрицательное, то вдоль обмотки. Величина вектора пропорциональна величине напряжения на фазе в данный момент.
Чтобы получить результирующий вектор магнитного поля необходимо сложить данные вектора по закону сложения векторов.
Аналогично построение для второго и третьего моментов времени.
Рисунок 4. Момент 2. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Так, с течение времени, результирующий вектор плавно меняет свое направление, на рисунке 5 изображены получившиеся вектора и изображен полный поворот магнитного поля статора за один электрический период.
Рисунок 5. Вид вращающегося магнитного поля формируемого обмотками на статоре двигателя.
За этим вектором электрического магнитного поля увлекается магнитное поле постоянных магнитов ротора в каждый момент времени (рисунок 6).
Рисунок 6. Постоянный магнит (ротор) следует направлению магнитного поля формируемого статором.
Так работает синхронная машина переменного тока.
Имея источник постоянного тока необходимо самостоятельно формировать один электрический период со сменой направлений тока на трех обмотках двигателя. Поскольку бесколлекторный двигатель по конструкции такой же, как синхронный, в генераторном режиме имеет идентичные параметры, необходимо отталкиваться от рисунка 5, где изображено сформированное вращающееся магнитное поле.
Постоянное напряжение
Источник постоянного тока имеет только 2 провода «плюс питания» и «минус питания» это значит, что есть возможность подавать напряжение только на две из трех обмоток. Необходимо аппроксимировать рисунок 5 и выделить все моменты, при которых возможно скоммутировать 2 фазы из трех.
Необходимо аппроксимировать рисунок 5 и выделить все моменты, при которых возможно скоммутировать 2 фазы из трех.
Число перестановок из множества 3 равняется 6, следовательно, имеется 6 вариантов подключения обмоток.
Изобразим возможные варианты коммутаций и выделим последовательность, при которой вектор будет шаг за шагом проворачиваться далее пока не дойдет до конца периода и не начнет сначала.
Электрический период будем отсчитывать от первого вектора.
Рисунок 7. Вид шести векторов магнитного поля которые можно создать от источника постоянного тока коммутацией двух из трех обмоток.
На рисунке 5 видно, что при управлении трехфазным синусоидальным напряжением имеется множество векторов плавно проворачивающихся с течением времени, а при коммутации постоянным током возможно получить вращающееся поле только из 6 векторов, то есть переключение на следующий шаг должно происходить каждые 60 электрических градусов.
Результаты из рисунка 7 сведены в таблицу 1.
Таблица 1. Полученная последовательность коммутаций обмоток двигателя.
| Плюс питания | Минус питания | Обмотка не подключена |
| W | U | V |
| W | V | U |
| U | V | W |
| U | W | V |
| V | W | U |
| V | U | W |
Вид получившегося управляющего сигнала в соответствии с таблицей 1 изображен на рисунке 8. Где -V коммутация на минус источника питания (GND), а +V коммутация на плюс источника питания.
Рисунок 8. Вид управляющих сигналов от источника постоянного тока для бесколлекторного двигателя. Желтый – фаза W, синий – U, красный – V.
Однако реальная картина с фаз двигателя будет похожа на синусоидальный сигнал из рисунка 1. У сигнала образуется трапециевидная форма, так как в моменты, когда обмотка двигателя не подключена, постоянные магниты ротора наводят на нее ЭДС (рисунок 9).
Рисунок 9. Вид сигнала с обмоток бесколлекторного двигателя в рабочем режиме.
На осциллографе это выглядит так:
Рисунок 10. Вид окна осциллографа при измерении одной фазы двигателя.
Конструктивные особенности
Как было сказано ранее за 6 переключений обмоток формируется один электрический период 360 электрических градусов.
Необходимо связать данный период с реальным углом вращения ротора. Двигатели с одной парой полюсов и трехзубым статором применяются крайне редко, двигатели имеют N пар полюсов.
На рисунке 11 изображены модели двигателя с одной парой полюсов и с двумя парами полюсов.
а. б.
Рисунок 11. Модель двигателя с одной (a) и с двумя (б) парами полюсов.
Двигатель с двумя парами полюсов имеет 6 обмоток, каждая из обмоток парная, каждая группа из 3 обмоток смещена между собой на 120 электрических градусов. На рисунке 12б. отложен один период для 6 обмоток. Обмотки U1-U2, V1-V2, W1-W2 соединены между собой и в конструкции представляют 3 провода вывода фаз. Для простоты рисунка не отображены соединения, но следует запомнить, что U1-U2, V1-V2, W1-W2 одно и то же.
На рисунке 12б. отложен один период для 6 обмоток. Обмотки U1-U2, V1-V2, W1-W2 соединены между собой и в конструкции представляют 3 провода вывода фаз. Для простоты рисунка не отображены соединения, но следует запомнить, что U1-U2, V1-V2, W1-W2 одно и то же.
На рисунке 12, исходя из данных таблицы 1, изображены вектора для одной и двух пар полюсов.
а. б.
Рисунок 12. Схема векторов магнитного поля для двигателя с одной (a) и с двумя (б) парами полюсов.
На рисунке 13 изображены вектора, созданные 6 коммутациями обмоток двигателя с одной парой полюсов. Ротор состоит из постоянных магнитов, за 6 шагов ротор провернется на 360 механических градусов.
На рисунке обозначены конечные положения ротора, в промежутках между двумя соседними положениями ротор проворачивается от предыдущего к следующему скоммутированному состоянию. Когда ротор достигает данного конечного положения, должно происходить следующее переключение и ротор будет стремиться к новому заданному положению, так чтобы его вектор магнитного поля стал сонаправлен с вектором электромагнитного поля статора.
Когда ротор достигает данного конечного положения, должно происходить следующее переключение и ротор будет стремиться к новому заданному положению, так чтобы его вектор магнитного поля стал сонаправлен с вектором электромагнитного поля статора.
Рисунок 13. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с одной парой полюсов.
В двигателях с N парами полюсов необходимо пройти N электрических периодов для полного механического оборота.
Двигатель с двумя парами полюсов будет иметь два магнита с полюсами S и N, и 6 обмоток (рисунок 14). Каждая группа из 3 обмотки смещены друг относительно друга на 120 электрических градусов.
Рисунок 14. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с двумя парами полюсов.
Определение положения ротора бесколлекторного двигателя
Как было сказано ранее для работы двигателя необходимо в нужные моменты времени подключать напряжение на нужные обмотки статора. Подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора, так чтобы магнитное поле статора всегда опережало магнитное поле ротора. Для определения положения ротора двигателя и коммутаций обмоток используют электронный блок управления.
Подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора, так чтобы магнитное поле статора всегда опережало магнитное поле ротора. Для определения положения ротора двигателя и коммутаций обмоток используют электронный блок управления.
Отслеживание положения ротора возможно несколькими способами:
1. По датчикам Холла
2. По обратной ЭДС
Как правило, датчиками Холла производители оснащают двигатель при выпуске, поэтому это самый распространённый метод управления.
Коммутирование обмоток в соответствии с сигналами обратной ЭДС позволяет отказаться от датчиков встроенных в двигатель и использовать в качестве датчика анализ свободной фазы двигателя, на которую будет наводиться магнитным полем противо-ЭДС.
Управление бесколлекторным двигателем с датчиками Холла
Чтобы коммутировать обмотки в нужные моменты времени необходимо отслеживать положение ротора в электрических градусах. Для этого применяются датчики Холла.
Поскольку имеется 6 состояний вектора магнитного поля необходимо 3 датчика Холла, которые будут представлять один абсолютный датчик положения с трехбитным выходом. Датчики Холла устанавливаются также как обмотки, смещенные между собой на 120 электрических градусов. Это позволяет использовать магниты ротора в качестве воздействующего элемента датчика.
Рисунок 15. Сигналы с датчиков Холла за один электрический оборот двигателя.
Для вращения двигателя необходимо чтобы магнитное поле статора опережало магнитное поле ротора, положение, когда вектор магнитного поля ротора сонаправлен с вектором магнитного поля статора является конечным для данной коммутации, именно в этот момент должно происходить переключение на следующую комбинацию, чтобы не давать ротору зависать в стационарном положении.
Cопоставим сигналы с датчиков Холла с комбинацией фаз которые необходимо скоммутировать (таблица 2)
Таблица 2. Сопоставление сигналов датчиков Холла с коммутацией фаз двигателя.
| Положение двигателя | HU(1) | HV(2) | HW(3) | U | V | W |
| 0 | 0 | 0 | 1 | 0 | — | + |
| 1 | 0 | 1 | + | — | 0 | |
| 1 | 0 | 0 | + | 0 | — | |
| 1 | 1 | 0 | 0 | + | — | |
| 0 | 1 | 0 | — | + | 0 | |
| 360/N | 0 | 1 | 1 | — | 0 | + |
При равномерном вращении двигателя с датчиков поступает сигнал смещенный на 1/6 периода, 60 электрических градусов (рисунок 16).
Рисунок 16. Вид сигнала с датчиков Холла.
Управление с помощью сигнала обратной ЭДС
Существуют бесколлекторный двигатели без датчиков положения. Определение положения ротора осуществляется с помощью анализа сигнала ЭДС на свободной фазе двигателя. В каждый момент времени к одной из фаз подключен «+» к другой «-» питания, одна из фаз остается свободной. Вращаясь, магнитное поле ротора наводит ЭДС в свободной обмотке. По мере вращения напряжение на свободной фазе изменяется (рисунок 17).
Определение положения ротора осуществляется с помощью анализа сигнала ЭДС на свободной фазе двигателя. В каждый момент времени к одной из фаз подключен «+» к другой «-» питания, одна из фаз остается свободной. Вращаясь, магнитное поле ротора наводит ЭДС в свободной обмотке. По мере вращения напряжение на свободной фазе изменяется (рисунок 17).
Рисунок 17. Изменение напряжения на фазе двигателя.
Сигнал с обмотки двигателя разбит на 4 момента:
1. Обмотка подключена к 0
2. Обмотка не подключена (свободная фаза)
3. Обмотка подключена к питающему напряжению
4. Обмотка не подключена (свободная фаза)
Сопоставив сигнал с фаз с управляющим сигналом, видно, что момент перехода на следующее состояние можно детектировать пересечением средней точки (половины питающего напряжения) с фазой, которая в данный момент не подключена (рисунок 18).
Рисунок 18. Сопоставление управляющего сигнала с сигналом на фазах двигателя.
После детектирования пересечения необходимо выдержать паузу и включать следующее состояние. По данному рисунку составлен алгоритм переключений состояний обмоток (таблица 3).
Таблица 3. Алгоритм переключения обмоток двигателя
| Текущее состояние | U | V | W | Следующее состояние |
| 1 | — | Ожидание пересечения средней точки из + в — | + | 2 |
| 2 | Ожидание пересечения средней точки из — в + | — | + | 3 |
| 3 | + | — | Ожидание пересечения средней точки из + в — | 4 |
| 4 | + | Ожидание пересечения средней точки из — в + | — | 5 |
| 5 | Ожидание пересечения средней точки из + в — | + | — | 6 |
| 6 | — | + | Ожидание пересечения средней точки из — в + | 1 |
Пересечение средней точки проще всего детектировать компаратором, на один вход компаратора подается напряжение средней точки, а на второй текущее напряжение фазы.
Рисунок 19. Детектирование средней точки компаратором.
Компаратор срабатывает в момент перехода напряжения через среднюю точку и генерирует сигнал для микроконтроллера.
Обработка сигнала с фаз двигателя
Однако сигнал с фаз при регулировании скорости ШИМ отличается видом, и имеет импульсный характер (рисунок 21), в таком сигнале невозможно детектировать пересечение со средней точкой.
Рисунок 20. Вид сигнала фазы при регулировании скорости ШИМ.
Поэтому данный сигнал следует отфильтровать RC фильтром чтобы получить огибающую, а так же разделить под требования компаратора. По мере увеличения скважности шим сигнал будет возрастать по амплитуде (рисунок 22).
Рисунок 21. Схема делителя и фильтра сигнала с фазы двигателя.
Рисунок 22. Огибающая сигнала при изменении скважности ШИМ.
Огибающая сигнала при изменении скважности ШИМ.
Схема со средней точкой
Рисунок 23. Вид виртуальная средней точки. Картинка взята с avislab.com/
С фаз снимаются сигналы через токограничительные резисторы и объединяются, получается вот такая картина:
Рисунок 24. Вид осциллограммы напряжения виртуальной средней точки.
Из-за ШИМ, напряжение средней точки не постоянно, сигнал так же необходимо фильтровать. Напряжение средней точки после сглаживания будет достаточно большим (в районе питающего напряжения двигателя), его необходимо разделить делителем напряжения до значения половины питающего напряжения.
После прохождения сигнала через фильтр колебания сглаживается и получается ровное напряжение относительно которого можно детектировать пересечение обратной ЭДС.
Рисунок 26. Напряжение после делителя и фильтра низких частот.
Средняя точка будет менять свое значение в зависимости от напряжения (скважности ШИМ), так же как и огибающая сигнала.
Полученные сигналы с компараторов заводятся на микроконтроллер, который их обрабатывает по алгоритму выше.
Пока на этом все.
Автор: Woofer46
Источник
Объяснение трехфазного питания
| Объяснение трехфазного питания
В этом видео подробно рассматривается трехфазное питание и объясняется, как оно работает. Трехфазную электроэнергию можно определить как общий метод производства, передачи и распределения электроэнергии переменного тока. Это тип многофазной системы, который является наиболее распространенным методом, используемым электрическими сетями во всем мире для передачи энергии.
Дополнительные ресурсы Raritan
Стенограмма:
Добро пожаловать в это анимационное видео, которое быстро объясняет 3-фазное питание. Я также объясню тайну, почему 3 линии электропередач находятся на расстоянии 120 градусов друг от друга, потому что это важная часть для понимания 3-фазного питания.
Я также объясню тайну, почему 3 линии электропередач находятся на расстоянии 120 градусов друг от друга, потому что это важная часть для понимания 3-фазного питания.
Электроэнергия, поступающая в центр обработки данных, обычно представляет собой трехфазную электроэнергию переменного тока, что означает трехфазную электроэнергию переменного тока.
Давайте рассмотрим упрощенный пример того, как генерируется трехфазное питание.
Этот пример отличается от того, что я использовал для описания того, как трехфазный двигатель использует мощность. В видео с переменным током мы показали, как вращение магнита вокруг одного провода заставляет ток течь туда и обратно. Теперь мы пропустим магнит через 3 провода и посмотрим, как это повлияет на ток в каждом проводе.
В этом трехфазном примере северный положительный конец магнита направлен прямо вверх на первую линию.
Чтобы упростить объяснение концепции, давайте воспользуемся циферблатом и скажем, что первая линия находится в положении «двенадцать часов». Электроны в линии 1 будут течь к северному полюсу магнита. Что произойдет, если магнит повернется на 90 градусов?
Электроны в линии 1 будут течь к северному полюсу магнита. Что произойдет, если магнит повернется на 90 градусов?
Как мы видели на видео с переменным током, поскольку магнит перпендикулярен линии 1, электроны в линии 1 перестанут двигаться. Затем, когда магнит качается, более 90 градусов и южный полюс магнита приближается к первой линии, и электроны меняются местами, что означает, что направление тока меняется на противоположное. Об этом было подробно рассказано в видео о переменном токе. Если вы нажали на это видео, не имея полного представления о переменном токе, сначала просмотрите это видео.
Глядя на таблицу, вы можете понять, почему я выбрал аналоговый циферблат. Круг равен 360 градусам, и часы делят круг на 12 частей, так что каждый час покрывает 30 градусов круга. Переход с 12 на 3 равен 90 градусов, а переход от 12 к 4 составляет 120 градусов.
При выработке трехфазного питания медные линии располагаются под углом 120 градусов друг к другу. Итак, когда вы находитесь в положении «четыре часа» в нашем примере, это 120 градусов от первой линии. А положение «8 часов» находится на 120 градусов от положений «4 часа» и «12 часов». 3 линии равномерно распределены по кругу.
А положение «8 часов» находится на 120 градусов от положений «4 часа» и «12 часов». 3 линии равномерно распределены по кругу.
Если северный полюс находится ближе к одному из 3-х проводов, то электроны движутся в этом направлении. Чем ближе южный полюс подходит к каждому проводу, тем больше электроны удаляются от южного полюса. В каждой из этих трех линий электроны движутся вперед и назад, но они не всегда движутся в том же направлении или с той же скоростью, что и две другие линии.
Давайте снова посмотрим на пример. Когда магнит вращается, когда северный полюс находится в положении 1 час, он становится перпендикулярным линии 2, поэтому, конечно, электроны перестают двигаться по линии 2. Но они все еще движутся по линии 1, притягиваясь к более близкому северному полюсу, и они двигаются по линии 3, отталкиваясь от южного полюса. Когда северный полюс магнита повернут на 2 часа, на линию 1 и [линию] 2 влияет северный полюс, но южный полюс находится прямо напротив линии 3, поэтому теперь он имеет пиковый ток.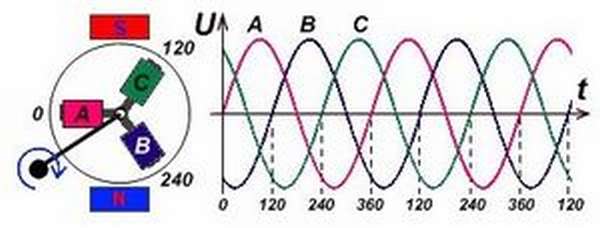 В 3 часа магнит перпендикулярен линии 1, поэтому электроны перестают двигаться, но на линию 2 влияет северный полюс, а на линию 3 — южный полюс, поэтому ток течет по линиям 2 и 3.
В 3 часа магнит перпендикулярен линии 1, поэтому электроны перестают двигаться, но на линию 2 влияет северный полюс, а на линию 3 — южный полюс, поэтому ток течет по линиям 2 и 3.
Надеюсь, этот пример показывает вам, что в любой момент времени ток всегда течет как минимум по 2 линиям. Он также показывает взаимосвязь между тремя линиями, когда магнит вращается по кругу. Когда магнит движется вокруг циферблата, на каждую из трех линий будет влиять либо северный, либо южный полюс, за исключением случаев, когда магнит перпендикулярен линии.
Давайте сосредоточимся на линии 1. Она достигает своего пикового значения, когда северный полюс указывает на 12-часовую и 6-часовую позиции. Это при нулевом токе, когда северный полюс указывает на 3 и 9.час. Только 1 из 3 линий всегда находится на пике, но поскольку линий 3, для каждого цикла есть 3 положительных пика и 3 отрицательных пика. В 6 различных положениях на циферблате одна из линий находится на пике. Позиции 12 и 6 — чередующиеся пики линии 1, позиции 2 и 8 — чередующиеся пики линии 3, а позиции 4 и 10 — чередующиеся пики линии 2.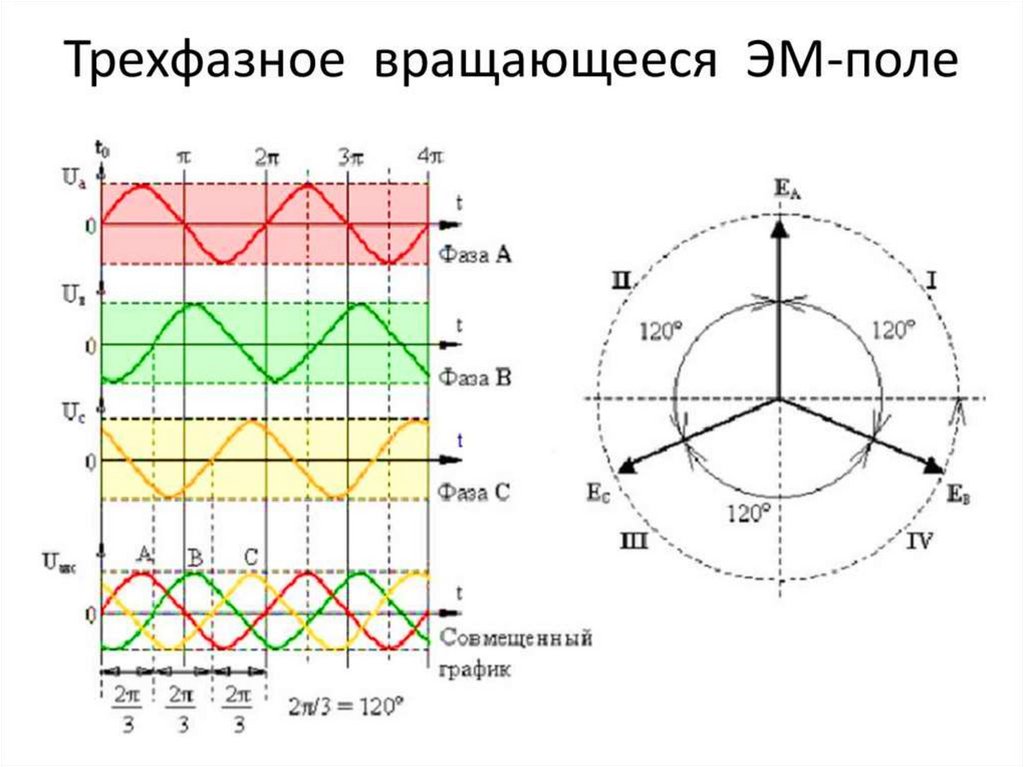
Теперь давайте объясним эти запутанные формы сигналов, которые часто используются для изображения трех фаз. Если вы посмотрите на пример сигнала, вы увидите, что первая линия выделена синим цветом, и она начинается с нуля. Это означает, что магнит перпендикулярен этой линии. Когда магнит движется, вы можете видеть, что ток достигает своего пика. Затем, когда положительный полюс проходит мимо этого провода, ток начинает ослабевать, пока магнит снова не станет перпендикулярным, что приводит к нулевому току. Когда отрицательный полюс начинает приближаться, ток меняет направление и движется в другом направлении к другому пику, прежде чем вернуться к нулевому току. Это завершает 1 полный цикл для этой строки.
Чтобы двумерная диаграмма показывала взаимосвязь между линиями, теперь в ней показан промежуток, который означает время, за которое магнит повернется на 120 градусов. Это когда красная линия находится на нулевом токе. По мере того, как магнит продолжает вращаться, красная линия будет двигаться к своему пиковому положительному току, а затем вернется к нулю, после чего ток изменит направление. График также показывает, что третья линия начинается при нулевом токе через 120 градусов после второй линии. Итак, если вы посмотрите на эти 3 линии, вы увидите, что, когда одна линия находится на пике, другие 2 линии все еще генерируют ток, но не в полную силу, то есть они не на пике. Так как электроны текут от положительного пика к отрицательному, ток отображается как текущий от положительных значений к отрицательным. Помните, что положительные и отрицательные стороны не исключают друг друга. Положительная и отрицательная коннотация используется только для описания того, как чередуется ток.
График также показывает, что третья линия начинается при нулевом токе через 120 градусов после второй линии. Итак, если вы посмотрите на эти 3 линии, вы увидите, что, когда одна линия находится на пике, другие 2 линии все еще генерируют ток, но не в полную силу, то есть они не на пике. Так как электроны текут от положительного пика к отрицательному, ток отображается как текущий от положительных значений к отрицательным. Помните, что положительные и отрицательные стороны не исключают друг друга. Положительная и отрицательная коннотация используется только для описания того, как чередуется ток.
В 3-фазной цепи вы обычно берете одну из 3-х токонесущих линий и подключаете ее к другой из 3-х токонесущих линий. Одно исключение из этого описано в видео «Дельта против звезды».
В качестве примера возьмем 3-фазную линию 208 вольт. Каждая из трех линий будет иметь напряжение 120 вольт. Если вы посмотрите на график, вы легко увидите выходную мощность любых двух линий. Если одна линия находится на пике, другая линия не находится на пике.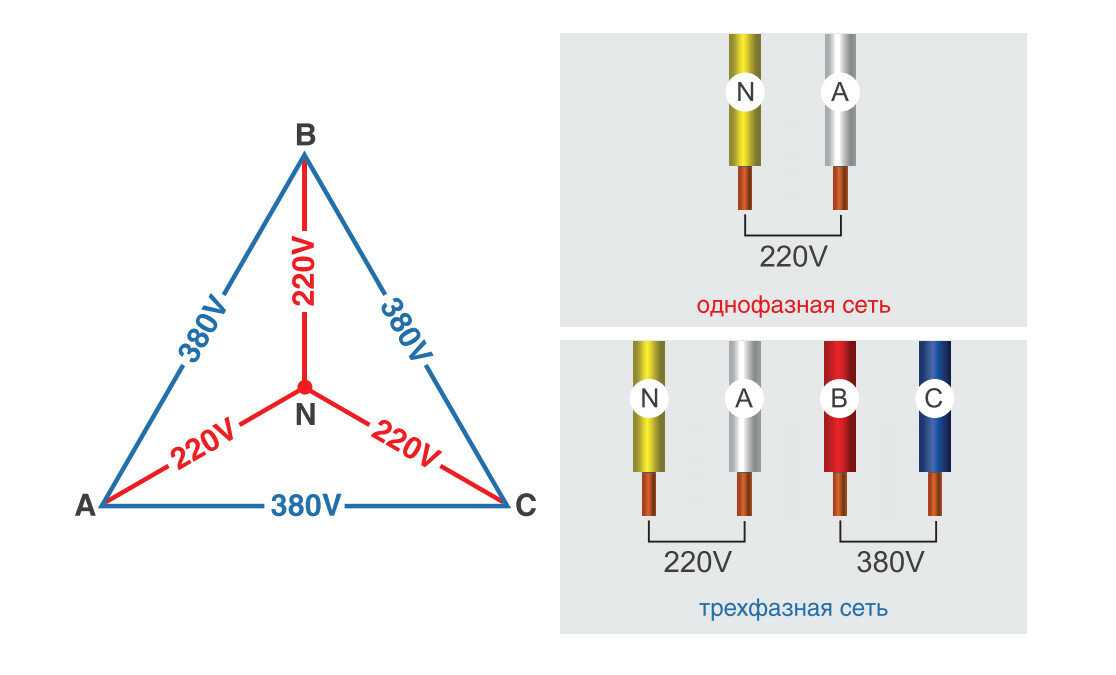 Вот почему в трехфазной цепи неправильно умножать 120 вольт на 2, чтобы получить 240 вольт.
Вот почему в трехфазной цепи неправильно умножать 120 вольт на 2, чтобы получить 240 вольт.
Итак, если вам интересно, почему у вас дома есть 110/120 вольт для ваших обычных розеток, но у вас также есть приборы на 220/240 вольт, что дает? Ну, это не трехфазное питание. На самом деле это 2 однофазные линии.
Итак, как рассчитать мощность объединения двух линий в трехфазной цепи? Формула представляет собой вольт, умноженный на квадратный корень из 3, который округляется до 1,732. Для 2 линий, каждая из которых несет 120 вольт, расчет для этого равен 120 вольт, умноженному на 1,732, и результат округляется до 208 вольт.
Вот почему мы называем это трехфазной цепью на 208 В или трехфазной линией на 208 В. Трехфазная цепь на 400 вольт означает, что каждая из 3 линий несет 230 вольт.
Последняя тема, о которой я расскажу в этом видео: почему компании и центры обработки данных используют 3 фазы?
Прямо сейчас позвольте мне дать вам простой обзор. Для трехфазной сети вы соединяете линию 1 с линией 2 и получаете 208 вольт. В то же время вы [можете] подключить линию 2 к линии 3 и получить 208 вольт. И вы [можете] соединить линию 3 с линией 1 и получить 208 вольт. Если провод способен подавать 30 ампер, то передаваемая мощность составляет 208 вольт, умноженных на 30 ампер, умноженных на 1,732, что дает общую доступную мощность 10,8 кВА.
В то же время вы [можете] подключить линию 2 к линии 3 и получить 208 вольт. И вы [можете] соединить линию 3 с линией 1 и получить 208 вольт. Если провод способен подавать 30 ампер, то передаваемая мощность составляет 208 вольт, умноженных на 30 ампер, умноженных на 1,732, что дает общую доступную мощность 10,8 кВА.
Для сравнения, для однофазной цепи на 30 ампер с напряжением 208 вольт вы получите только 6,2 кВА. По сути, 3 фазы обеспечивают большую мощность.
Существуют и другие факторы, по которым гораздо лучше подавать трехфазное питание к стойке центра обработки данных, а не использовать однофазное питание, и эти факторы обсуждаются в видео о вольтах и амперах, а также в видео 208 и 400 вольт.
Генерация 3-фазной мощности в 3-фазных цепях
Мощность в трехфазных цепях
Трехфазное питание в основном используется для производства, передачи и распределения электроэнергии из-за их превосходства. Он более экономичен по сравнению с однофазным питанием и требует для питания трех токопроводящих жил. Мощность в однофазной системе или цепи определяется соотношением, показанным ниже:
Мощность в однофазной системе или цепи определяется соотношением, показанным ниже:
Где,
В — напряжение однофазной сети, т. е. В ф.
I — ток однофазной сети, т. е. I фот и
Cosϕ — коэффициент мощности цепи.
Содержимое:
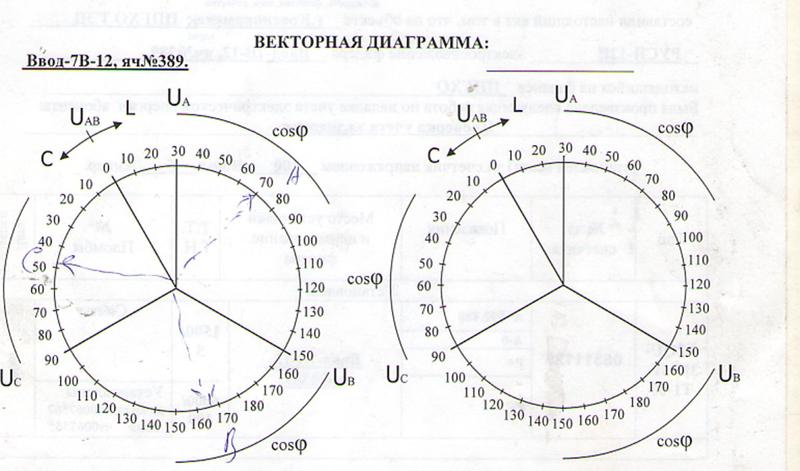
- Генерация трехфазных ЭДС в трехфазной цепи
- Векторная диаграмма
В трехфазных цепях (симметричная нагрузка) мощность определяется как сумма различных мощностей в трехфазной системе. т.е.
Мощность при соединении звездой в 3-х фазных цепях задается как
Фазное и линейное напряжение при соединении звездой представлено, как показано ниже:
Таким образом, уравнение (1) может быть записано как:
Мощность при соединении треугольником в трехфазных цепях определяется уравнением, показанным ниже:
а фазный и линейный ток задаются как:
Следовательно, уравнение (3) может быть записано как
Таким образом, общая мощность в 3-фазной системе сбалансированной нагрузки, независимо от их соединений, является ли система звездой подключен или соединен треугольником, мощность определяется соотношением:
√3 В L I L Cosϕ
Единицы измерения: киловатт (кВт) или ватт (Вт).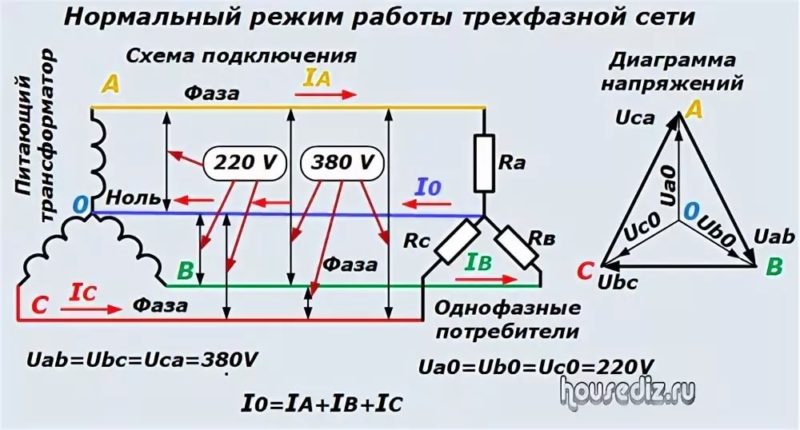
Полная мощность дается как:
Единицей полной мощности является киловольт-ампер (кВА) или вольт-ампер (ВА).
Аналогично, Реактивная мощность задается уравнением:
Его единицами измерения являются киловольт-ампер реактивный (кВАр) или вольт-ампер реактивный (ВАР).
Генерация трехфазных ЭДС в трехфазной цепи
В трехфазной системе есть три равных напряжения или ЭДС одной и той же частоты, имеющих разность фаз 120 градусов. Эти напряжения могут быть получены трехфазным генератором переменного тока, имеющим три одинаковые обмотки, смещенные друг от друга на 120 электрических градусов.
Когда эти обмотки остаются неподвижными и магнитное поле вращается, как показано на рисунке А ниже, или когда обмотки остаются неподвижными и магнитное поле вращается, как показано ниже на рисунке В, в каждой обмотке индуцируется ЭДС . Величина и частота этих ЭДС одинаковы, но смещены друг от друга на угол 120 градусов.
Рассмотрим три идентичные катушки a 1 a 2 , b 1 b 2 и c 1 c 2 , как показано на рисунке выше. На этом рисунке a 1 , b 1 и c 1 являются начальными выводами, тогда как a 2 , b 2 и c 2 являются конечными выводами трех катушек. Между пусковыми клеммами a 1 , b 1 и c 9 должна поддерживаться разность фаз 120 градусов.0073 1 .
Теперь пусть три катушки установлены на одной оси, и они вращаются либо за счет удержания катушки в неподвижном состоянии и перемещения магнитного поля, либо наоборот против часовой стрелки со скоростью (ω) радиан в секунду. В трех катушках соответственно индуцируются три ЭДС.
Рассматривая фигуру С, анализ их величин и направлений дается следующим образом:
ЭДС, индуцированная в катушке приведенная выше цифра C представлена как e а1а2 .
Катушка b 1 b 2 находится на 120 градусов электрически позади катушки a 1 a 2 .