





Теория автоматического регулирования частоты вращения вала тепловой машины явилась научной базой развития теории автоматического регулирования и управления в целом.
Впервые автоматический регулятор был установлен на «огнедействующей машине», построенной в 1765 г. русским механиком изобретателем И. И. Ползуновым на Барнаульском заводе. В этой машине автоматический регулятор поплавкового типа (рис. 1) предназначался для поддержания уровня воды в котле в некоторых заданных пределах. Связь между подачей воды G, осуществляемой под управлением автоматического регулятора, и уровнем ее Н в котле показана на рис. 2 в виде графика G = f (H), называемого регуляторной характеристикой. Наибольшая подача воды Gmaх производится при полном открытии задвижки 3 (см. рис. 1) на подводящей трубе 2, что соответствует крайнему положению поплавка 1 при Hmin (точка а на рис. 2). По мере повышения уровня воды в котле задвижка 3 все более уменьшает проходное сечение подводящей трубы 2, отчего уменьшается и подача воды, которая прекратится при полном перекрытии трубы 2. Это ограничивает верхний предел уровня Hmax (точка b на рис. 2). Разность ?Н = Hmax — Hmin, называемая неравномерностью работы регулятора, является одним из основных параметров системы автоматического регулирования, характеризующих точность поддержания регулируемого параметра (в данном случае уровня воды в котле).
Через двадцать лет, в 1786 г., английский механик Д. Уатт построил сконструированную им универсальную паровую машину и установил на ней центробежный регулятор, предназначенный для поддержания постоянной угловой скорости кривошипа машины (рис. 3). При увеличении частоты вращения вала 1 машины, валика 2 и грузов 4 муфта 3 регулятора поднимается и перемещает заслонку 5 в сторону перекрытия паровпускной трубы 6, что приводит к уменьшению крутящего момента машины.
Связь между крутящим моментом М машины и частотой вращения кривошипа при наличии регулятора показана на рис, 4.

Из графика видно, что наибольший крутящий момент Мmах (точка а) машина развивает при минимальной скорости ?min. Это происходит при крайнем нижнем положении грузов и муфты. При наибольшей допустимой скорости ?maх машины (точка b) количество поступающего пара должно соответствовать холостому ходу. Разность ?? = ?maх — ?min также можно назвать неравномерностью работы регулятора.
Сравнение регуляторных характеристик, приведенных на рис. 2 и 4, показывает идентичность работы регуляторов И. И. Ползунова и Д. Уатта, поэтому такой принцип регулирования (при наличии неравномерности работы) в настоящее время получил название Ползунова—Уатта.
Паровая машина Д. Уатта на длительное время стала основным промышленным двигателем.
Только в середине XIX в. в промышленности возникла необходимость создания более совершенных двигателей, имеющих лучшую экономичность. Такими двигателями и явились двигатели внутреннего сгорания и в первую очередь газовые. На этих новых двигателях так же, как и на всех паровых, в большинстве случаев устанавливали автоматические регуляторы типа Уатта. Но к более мощным и совершенным в техническом отношении машинам стали предъявлять и более высокие требования. В частности, появилось требование предельно снизить неравномерность работы машины и повысить чувствительность ее регулятора; в некоторых из регуляторов действительно удавалось решить эту задачу.
Однако, начиная с 60-х годов прошлого столетия, стали все чаще возникать трудности в наладке регуляторов; часто наблюдались случаи неустойчивой работы машин, снабженных автоматическими регуляторами Уатта; происходил колебательный процесс регулирования. Поэтому ощущалась острая необходимость научно проанализировать процесс регулирования и дать ответ на возникшие вопросы.
В 1868 г. появилась работа английского физика Д. К. Максвелла, посвященная регуляторам. Он применил линеаризацию динамической задачи, создав метод малых колебаний. С помощью этого метода задача устойчивости регулирования была сведена к исследованию системы алгебраических уравнений.
Работа Максвелла по существу не имела практического значения, так как объектом исследования был не применявшийся в то время астатический регулятор (с нулевой неравномерностью).
Участившиеся неудачи в наладке работы регуляторов типа Уатта вызвали у некоторых ученых и инженеров неверие в практическую пригодность регуляторов, работающих по принципу Ползунова—Уатта. Возникла необходимость в повышении качества регулирования. Например, настойчиво пытались использовать принцип регулирования по нагрузке (принцип Понселе) или по ускорению (принцип братьев Сименс).
Однако практика вскоре показала, что регуляторы типа Понселе и Сименс не могут быть использованы в качестве самостоятельных регуляторов угловой скорости тепловых двигателей.
Таким образом, в 60-х годах и в первой половине 70-х годов прошлого столетия теория регулирования не могла раскрыть особенностей работы и настройки регуляторов типа Ползунова— Уатта.
70-е и 80-е годы прошлого столетия были годами расцвета петербургской математической школы, возглавляемой акад. П. Л. Чебышевым. Характерная особенность этой школы — стремление к разработке конкретных задач, представлявших практический интерес.
В 1871 г. П. Л. Чебышевым была опубликована работа в области регулирования «О центробежном уравнителе», в которой рассмотрены пути уменьшения неравномерности работы регулятора.
В 1877 г. профессором Петербургского технологического института И. А. Вышнеградским была опубликована работа «О регуляторах прямого действия». И. А. Вышнеградский, будучи математиком по образованию, одновременно являлся и инженером, поэтому его подход к разрешению проблемы регулирования существенно отличался от подхода его предшественников.
В результате тщательного анализа характеристик машины и регулятора И. А. Вышнеградский составил безразмерное алгебраическое уравнение третьей степени с двумя постоянными коэффициентами, значения которых определялись параметрами системы. Эти два коэффициента позволили получить на плоскости графическое изображение области устойчивой работы системы двигатель — регулятор, названное впоследствии диаграммой И. А. Вышнеградского. Правильный инженерный подход к решению задачи дал возможность И. А. Вышнеградскому полностью уяснить динамику работы машины, снабженной регулятором Д. Уатта, и показать, что машина и регулятор во время работы образуют единую систему.
Труды И. А. Вышнеградского оказали большое влияние на все дальнейшие работы в области регулирования во всем мире и прежде всего в России. Поэтому его по праву считают основоположником классической теории автоматического регулирования.
В 70-е годы XIX в. правильность решения вопросов устойчивости регулирования методом малых колебаний с использованием только линеаризованных характеристик научно еще не была доказана.
В 1892 г. была опубликована работа талантливого ученого А. М. Ляпунова «Общие задачи об устойчивости движения». В ней строго обоснованы те случаи, когда решение дифференциальных уравнений методом малых колебаний дает правильное представление об устойчивости системы, а также рассмотрены случаи, в которых указанный метод не может дать такого ответа. Работа А. М. Ляпунова имела огромное значение для многих областей механики и физики. В теории автоматического регулирования она является фундаментом, на который опираются многие труды в этой области.
В 80-е годы прошлого столетия интерес к проблеме регулирования паровых поршневых машин стал постепенно ослабевать, и основное внимание переключилось на автоматическое регулирование гидравлических турбин, получивших большое распространение.
Обычные регуляторы прямого действия, оказывающие непосредственное воздействие на органы управления, на этих машинах не могли быть использованы, так как для их работы требовались значительные усилия. На гидравлических турбинах стали устанавливать регуляторы с особым механизмом, называемым серводвигателем (рис. 5). Такие регуляторы получили название регуляторов непрямого действия.
Работы И. А. Вышнеградского и А. М. Ляпунова подготовили базу для появления трудов проф. А. Стодолы, опубликованных в 1893 и 1894 гг.
Рассматривая системы регулирования, включавшие чувствительный элемент, серводвигатель, трубопровод и др., А. Стодола свел задачу регулирования к одному линейному дифференциальному уравнению высокого порядка (до шестого включительно).
С помощью этого уравнения А. Стодола дал практические рекомендации по обеспечению-устойчивости работы системы автоматического регулирования. Теоретические выводы были им проверены на действующих установках и полностью подтвердились.
Работы А. Стодолы завершили развитие классической теории автоматического регулирования, распространив идеи И. А. Вышнеградского на всю область непрямого регулирования.

В 1905 г. в Берлине появилась книга М. Толле «Регулирование двигателей», которая вскоре была переведена на русский язык. В этой работе изложена в основном линейная теория автоматического регулирования.
С 1903 г. вопросами регулирования машин стал заниматься Н. Е. Жуковский. Его лекции по курсу «Теория регулирования хода машин», прочитанные в МВТУ в учебном 1908—1909 году, были изданы в 1909 г. и вскоре получили широкую известность в России.
В этот период на многих зарубежных и отечественных заводах было организовано производство двигателей внутреннего сгорания.
Регулирование частоты вращения вала двигателей внутреннего сгорания осуществлялось в основном четырьмя способами.
Регулирование пропусками подачи топлива использовали главным образом для маломощных двигателей, для которых вопросы экономичности и равномерности работы не имели существенного значения. Регуляторы, работающие по такому принципу, были наиболее просты, не требовали особой точности изготовления деталей и допускали широкие диапазоны настройки. Конструктивно их выполняли в виде качающихся маятников, или деталей, совершающих возвратно-поступательное движение. Толкатель 5 такого регулятора (рис. 6) при помощи серьги 3 и шатуна 2 совершает возвратно-поступательное движение, создаваемое эксцентриком 1, который имеет частоту вращения, пропорциональную частоте вращения коленчатого вала двигателя, и передает движение толкателю 5, а через него плунжеру 6 топливного насоса. При левом положении толкатель 5 не соприкасается с плунжером 6 и передвигает последний лишь в правой части своего хода. Однако незадолго до соприкосновения с плунжером толкатель 5 набегает кулачком на неподвижный упор с уступом 4 и отклоняется на некоторый угол от направления движения. К упору толкатель возвращается под действием силы тяжести. При увеличении частоты вращения вала двигателя скорость движения толкателя 5 и угол отклонения увеличиваются, поэтому при определенном максимальном скоростном режиме толкатель 5 не успевает вернуться к первоначальному направлению движения и проходит мимо плунжера 6, что приводит к пропуску подачи топлива и вспышки в цилиндре двигателя (см. на рис. 7 цикл II, такт 3).
Регулирование изменением состава смеси путем изменения количества подаваемого топлива или воздуха осуществлялось изменением высоты или продолжительности подъема соответствующих клапанов.
Регулирование изменением количества подаваемого топлива в цилиндр выполнялось с помощью обратного перепуска во впускной патрубок уже засосанной горючей смеси или с помощью дросселирования смеси в период всего хода всасывания.
Регулирование с помощью изменения состава смеси и ее количества представляет собой совокупность двух предыдущих способов.

При больших нагрузках регулирование осуществлялось изменением состава смеси, а при пониженных нагрузках — изменением количества смеси.
Последние три способа регулирования осуществлялись с помощью регуляторов прямого действия типа Уатта.
Трудности, связанные с созданием надежных регуляторов, возникшие в 60-х годах прошлого столетия, привели к тому, что в конце XIX и начале XX вв. многие заводы, выпускавшие двигатели внутреннего сгорания, предпочитали получать регуляторы готовыми от заводов, специализировавшихся на их производстве и имевших, следовательно, больший опыт, тем более что регуляторы этих заводов были дешевле и надежнее в работе.
К таким заводам относится, например, немецкий завод Янс (Iahns—Regulatoren—Geselschaft m. b. H.), выпускавший центробежные регуляторы с вертикальными валиками и с горизонтально расходящимися грузами (рис. 8).
При некоторых условиях работы двигателей внутреннего сгорания (например, в насосных и электрогенераторных установках) необходимо в небольших пределах изменять частоту вращения вала от руки, воздействия на автоматический регулятор. В упомянутых регуляторах это осуществлялось при помощи дополнительной наружной пружины (рис. 9). Натяжение пружины в небольших пределах могло быть изменено обслуживающим персоналом во время работы двигателя.
В 1898 г. на Петербургском двигателестроительном заводе братьев Нобель (ныне «Русский дизель») был сконструирован и в 1899 г. построен нашедший промышленное применение двигатель с воспламенением от сжатия. Схема топливного насоса и автоматического регулятора этого двигателя представлена на рис. 10.
Такая система регулирования подачи топлива хорошо зарекомендовала себя в эксплуатации и продолжительное время использовалась на различных двигателях.
В 20-х годах текущего столетия отечественные и иностранные заводы уже делали попытки создания облегченных конструкций дизелей этого типа и установки их на транспортные агрегаты и, в частности, на трактор и автомобиль.
При использовании дизеля на транспорте необходимо воздействие регулятора по крайней мере на двух режимах: номинальном скоростном, когда регулятор не допускает чрезмерного повышения частоты вращения вала в случае снижения нагрузки, и при холостом ходе на минимальном скоростном режиме. Естественной и этих условиях была идея установления на двигателе двух регуляторов, каждый из которых срабатывал бы на указанных выше режимах (дизель МАН 100/110).
Однако установка двух регуляторов не могла быть признана удовлетворительной, поэтому были предприняты попытки совместить оба регулятора в одном агрегате, как это. выполнено в дизеле МАП 80/90 (рис. 11).

В конструктивном отношении более простым и компактным оказался автоматический регулятор, показанный на рис. 12. Автоматические регуляторы такого типа,, называемые двухрежимными, применялись на автомобильных дизелях, например на дизелях ЯАЗ-204 и др.
При двухрежимном регулировании двигатель в интервале между максимальным и минимальным скоростными режимами находится под управлением только водителя. В этом случае для полдержания заданного промежуточного скоростного режима водитель вынужден был часто прибегать к ручному регулированию скорости (непосредственно воздействовать на рейку топливного насоса). Появившиеся в начале 30-х годов нашего столетия всережимные регуляторы свободны от указанного недостатка.

Одним из первых всережимных автоматических регуляторов был регулятор, установленный на двигателе «Юнкере» (рис. 13). Эта схема регулятора настолько хорошо зарекомендовала себя в работе, что ее используют и до настоящего времени с небольшими усложнениями, связанными с увеличением диапазона регулируемых режимов (дизели В-2, Д-6 и др.), большей компактностью конструкции ИТ. п.

Несколько позже появился так называемый пневматический всережимный регулятор (рис. 14), в котором для регулирования использовали разрежение во всасывающем трубопроводе двигателя.
Изменяются системы регулирования и у тяжелых стационарных двигателей. В конце 20-х годов Коломенский завод им. В. В. Куйбышева и завод «Русский дизель» приступили к изготовлению автоматических регуляторов непрямого действия, а в конце 30-х годов некоторые фирмы, главным образом американские (например, фирма «Вудворт» и др.), стали специализироваться на выпуске более компактных регуляторов непрямого действия.
Регуляторы новых конструкций были сложнее прежних, но обеспечивали значительно более высокую точность регулирования, их удобно и легко было настраивать на требуемый скоростной режим.
В настоящее время двигатели внутреннего сгорания (дизели) широко используют для привода генераторов переменного тока, для которых требуется повышенная точность поддержания заданной частоты при всех нагрузках. Необходимость дальнейшего повышения качества процесса регулирования потребовала от создателей автоматических регуляторов поиска новых путей решения этой задачи. Существенные результаты были получены за счет объединения в одном автоматическом регуляторе по крайней мере двух принципов регулирования: принципа Ползунова— Уатта с принципом братьев Сименс или принципа Ползунова— Уатта с принципом Понселе. Такие автоматические регуляторы получили название двухимпульсных. Испытания двигателей, снабженных двухимпульсными регуляторами, показали перспективность выбранного направления.
Многие конструкции автоматических регуляторов снабжаются устройствами, обеспечивающими возможность дистанционного управления двигателями. Все больше проявляется тенденция сосредоточения в автоматическом регуляторе двигателя по возможности большего числа различных автоматических приборов. Например, некоторые автоматические регуляторы кроме устройств для поддержания заданного скоростного режима имеют устройства по ограничению нагрузки, корректированию внешней характеристики двигателя, контролю давления в системе смазки, изменению угла опережения впрыска при изменении частоты вращения коленчатого вала и по некоторым другим параметрам. Процесс сосредоточения автоматических приборов в одном агрегате будет, по-видимому, продолжаться и впредь.
Серьезных успехов в развитии теории автоматического регулирования и управления добились советские ученые. В 1938— 1939 гг. были опубликованы работы сотрудника Всесоюзного электротехнического института А. В. Михайлова, явившиеся началом весьма широкого применения новых — частотных методов в автоматическом регулировании. Теория автоматического регулирования и управления получила дальнейшую всестороннюю и глубокую разработку в трудах Б. Н. Петрова, В. А. Трапезникова, В. В. Солодовникова, Я.З. Цыпкина, М. А. Айзермана и многих других.
В Центральном котлотурбинном институте им. Ползунова (ЦКТИ) под руководством И. Н. Вознесенского была разработана теория связанного прямого и непрямого регулирования и найдены условия автономности.
Советские ученые значительно обогатили науку в области исследования устойчивости и качества различных нелинейных систем автоматического регулирования. Здесь можно назвать труды А. А. Андронова, Б. В. Булгакова, Н. Н. Баутина, А. Г. Майера, А.И. Лурье и многих других. На основе теории автоматического регулирования и управления, на базе опыта, накопленного человеком в различных областях техники, развивалась общая теория автоматики, получившая название технической кибернетики. Это — одно из направлений новой фундаментальной науки — кибернетики, науки об управлении в технике, природе и обществе.
Работы по общей теории автоматики выдвинули советскую науку в этой области на одно из первых мест в мире: первый международный конгресс по вопросам автоматического управления проходил в 1960 г. в Москве, и в организации его ведущее место занимали советские ученые.
Исследования в области общей теории автоматики сопровождались разработкой и анализом конкретных задач теории автоматического регулирования двигателей внутреннего сгорания. Вопросам устойчивости и качества работы систем автоматического регулирования быстроходных транспортных дизелей посвящен ряд работ, выполненных в научно-исследовательском автомоторном институте (НАМИ) при участии и под руководством проф. Г. Г. Калиша. Эти работы имели большое значение для двигателе- строения. Под руководством проф. Н. Н. Настенко были разработаны всережимные механические регуляторы, получившие широкое распространение.
В Центральном научно-исследовательском дизельном институте (ЦНИДИ), Центральном научно-исследовательском институте топливной аппаратуры (ЦНИТА), многими двигателестроительными заводами и вузами ведутся работы по созданию более совершенных автоматических регуляторов.
В области автоматического регулирования двигателей особо следует отметить работы профессоров А. М. Каца, М. И. Левина,
И. Толшина, И. И. Кринецкого, А. А. Грунауэра, Д. X. Морозова, Н. Н. Настенко, в области двухимпульсного регулирования — Е. С. Ковалевского и др.
vdvizhke.ru
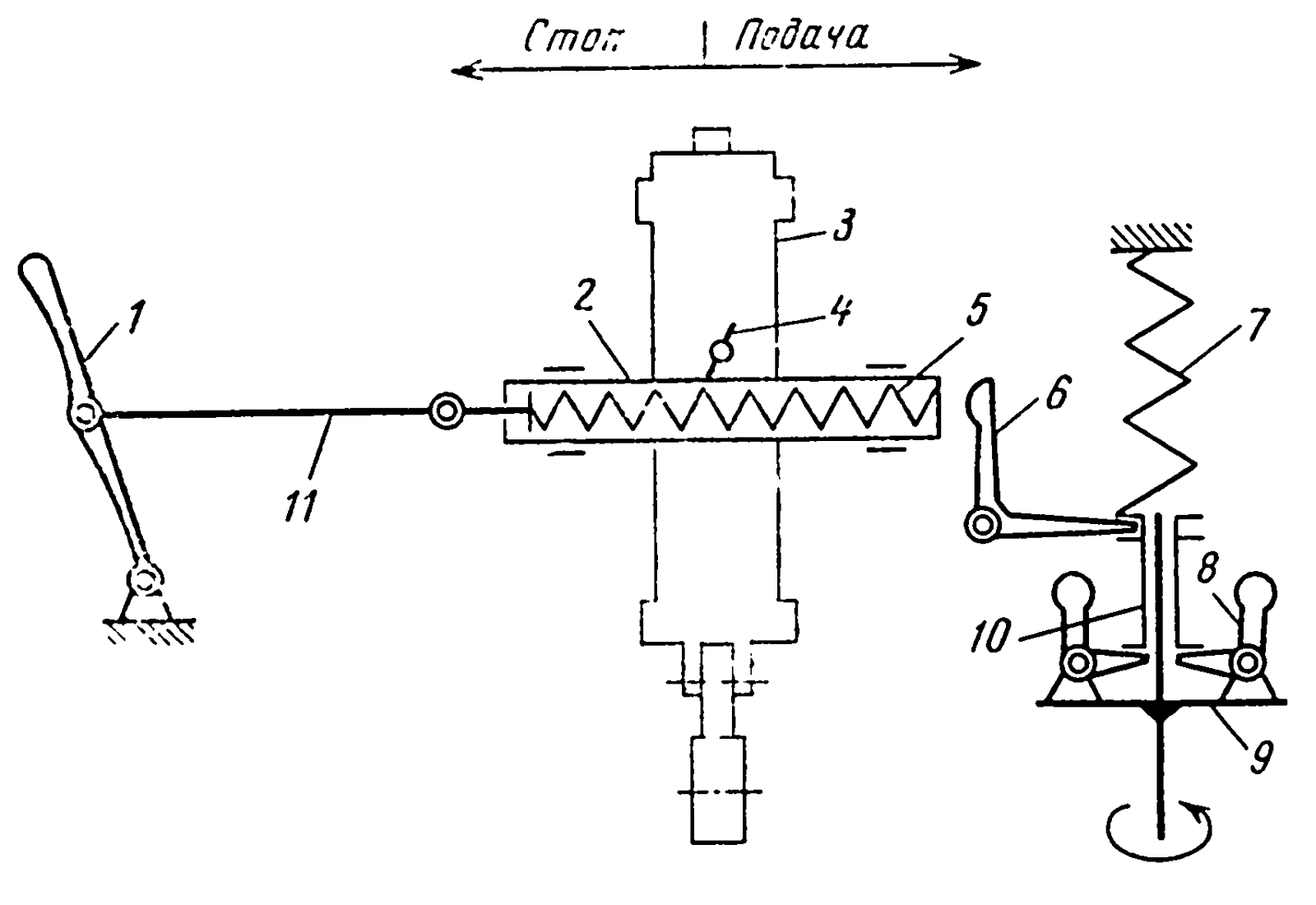 На рисунке дана схема предельного регулятора, принцип действия которого заключается в следующем. На вертикальном валу регулятора, который приводится во вращение от коленчатого вала, жестко закреплена крестовина (траверса) 9, на которой шарнирно (на осях) установлены угловые рычаги с грузами 8. Горизонтальные плечи этих рычагов упираются в муфту 10, нагруженную пружиной 7. Муфта может перемещаться вдоль вертикального вала регулятора. Верхним концом она связана с угловым рычагом 6, который может оказывать действие на пружинную связь 2. Последняя в свою очередь через рычаг 4 действует на регулирующий орган — зубчатую рейку топливного насоса 3, тем самым изменяя подачу топлива. При работе двигателя на установившемся режиме грузы 8 под действием центробежных сил стремятся разойтись и с помощью горизонтальных плеч рычагов приподнять муфту 10. Этому противодействует пружина 7, подобранная с таким расчетом, чтобы при работе двигателя с допустимой частотой вращения ее усилие на муфту было несколько больше усилия, оказываемого на нее рычагами. При уменьшении нагрузки частота вращения двигателя увеличивается, что приводит к повышению частоты вращения вертикального вала регулятора. Под действием увеличившейся центробежной силы грузы расходятся, угловые рычаги поворачиваются вокруг своих осей и, преодолевая сопротивление пружины, поднимают муфту 10 вверх. Рычаг 6, перемещаясь вместе с муфтой, передвигает пружинную связь 2 влево, которая через рычаг 4 уменьшает (или совсем отключает) подачу топлива насосами высокого давления. В результате двигатель снижает частоту вращения и центробежная сила грузов уменьшается. Пружина регулятора передвигает муфту вместе с рычагом 6 вниз, а пружина 5 возвращает пружинную связь в первоначальное положение, увеличивая цикловую подачу топлива. Таким образом, предельный регулятор включается в действие, когда частота вращения двигателя превышает предельно допустимую и может привести к выходу его из строя. Рукоятка 1 и тяга 11 служат для включения и выключения ТНВД в работу. Большинство главных ДВС промысловых судов, которые 60—80 % эксплуатационного времени работают в условиях постоянно изменяющихся нагрузок, имеют всережимные регуляторы. Одна из конструкций все-режимного регулятора показана на рисунке:
На рисунке дана схема предельного регулятора, принцип действия которого заключается в следующем. На вертикальном валу регулятора, который приводится во вращение от коленчатого вала, жестко закреплена крестовина (траверса) 9, на которой шарнирно (на осях) установлены угловые рычаги с грузами 8. Горизонтальные плечи этих рычагов упираются в муфту 10, нагруженную пружиной 7. Муфта может перемещаться вдоль вертикального вала регулятора. Верхним концом она связана с угловым рычагом 6, который может оказывать действие на пружинную связь 2. Последняя в свою очередь через рычаг 4 действует на регулирующий орган — зубчатую рейку топливного насоса 3, тем самым изменяя подачу топлива. При работе двигателя на установившемся режиме грузы 8 под действием центробежных сил стремятся разойтись и с помощью горизонтальных плеч рычагов приподнять муфту 10. Этому противодействует пружина 7, подобранная с таким расчетом, чтобы при работе двигателя с допустимой частотой вращения ее усилие на муфту было несколько больше усилия, оказываемого на нее рычагами. При уменьшении нагрузки частота вращения двигателя увеличивается, что приводит к повышению частоты вращения вертикального вала регулятора. Под действием увеличившейся центробежной силы грузы расходятся, угловые рычаги поворачиваются вокруг своих осей и, преодолевая сопротивление пружины, поднимают муфту 10 вверх. Рычаг 6, перемещаясь вместе с муфтой, передвигает пружинную связь 2 влево, которая через рычаг 4 уменьшает (или совсем отключает) подачу топлива насосами высокого давления. В результате двигатель снижает частоту вращения и центробежная сила грузов уменьшается. Пружина регулятора передвигает муфту вместе с рычагом 6 вниз, а пружина 5 возвращает пружинную связь в первоначальное положение, увеличивая цикловую подачу топлива. Таким образом, предельный регулятор включается в действие, когда частота вращения двигателя превышает предельно допустимую и может привести к выходу его из строя. Рукоятка 1 и тяга 11 служат для включения и выключения ТНВД в работу. Большинство главных ДВС промысловых судов, которые 60—80 % эксплуатационного времени работают в условиях постоянно изменяющихся нагрузок, имеют всережимные регуляторы. Одна из конструкций все-режимного регулятора показана на рисунке:  Он состоит из вертикального вала, вращающегося в подшипниках качения, на нижнем конце которого неподвижно закреплена шестерня 12, приводимая во вращение (через зубчатую передачу) коленчатым валом. В средней части вертикального вала на шпонке установлена крестовина 11, на которой шарнирно (на осях) установлены два груза 10 с угловыми рычагами. Горизонтальные плечи рычагов упираются во втулку 9 и во время работы перемещают ее вдоль вертикального вала. Сверху втулка через муфту 8 нагружена двумя пружинами 6 (внешней и внутренней), упирающимися в подпятник 1. Изменение натяжения пружин осуществляется нижней нарезной частью винта 3, который зафиксирован от проворачивания, но может перемещаться в осевом направлении. Перемещение винта вверх — вниз осуществляется при помощи конической шестерни 2, имеющей винтовую нарезку по внутреннему диаметру. Она выполняет роль гайки и приводится во вращение другой конической шестерней 4, при помощи шпонки жестко закрепленной на горизонтальном валу с маховиком 5 на другом его конце. Вращение маховика в ту или другую сторону сопровождается перемещением винта 3 вверх — вниз, что вызывает изменение силы натяжения пружин. Муфта 8 рычажной передачей связана с рейкой топливных насосов высокого давления. На любом установившемся режиме двигателя центробежные силы грузов уравновешиваются действием пружин и двигатель вращается с определенной частотой. При резком сбросе нагрузки и увеличении частоты вращения двигателя выше допустимой работа всережимного регулятора аналогична работе предельного. За счет увеличения частоты вращения грузы 10 расходятся в крайние положения и, преодолевая силу упругости, поднимают втулку 8 и рычаг 7 вверх, тем самым значительно уменьшая подачу топлива в цилиндры. Частота вращения коленчатого вала снижается, центробежные силы грузов уменьшаются и пружины ставят их в положение, близкое к первоначальному. Одновременно с этим подача топлива увеличивается, а частота вращения вновь повышается, но уже на меньшую величину. Так повторяется несколько раз, пока не установится постоянная предельная частота вращения. Чтобы изменить частоту вращения двигателя в интервале «Малый ход» — «Полный ход», необходимо вращать рукоятку маховика 5 в нужную нам сторону. При вращении его по часовой стрелке винт 3 опускается вниз и через подпятник 1 увеличивает натяжение пружин. Необходимо отметить, что на малых и средних оборотах внутренняя пружина находится в свободном состоянии, а действует только одна внешняя. При дальнейшем-повышении частоты вращения в действие вступают обе пружины. Увеличение силы затяжки пружины приводит к сближению грузов, опусканию втулки 8, увеличению подачи топлива и повышению частоты вращения коленчатого вала. Уменьшение частоты вращения двигателя достигается с поста управления вращением маховика против часовой стрелки. В этом случае сила натяжения пружин уменьшается, грузы 10 под действием центробежной силы разойдутся, горизонтальные плечи угловых рычагов поднимут втулку 8, которая, действуя на рычаг 7, уменьшит подачу топлива в цилиндры двигателя.
Он состоит из вертикального вала, вращающегося в подшипниках качения, на нижнем конце которого неподвижно закреплена шестерня 12, приводимая во вращение (через зубчатую передачу) коленчатым валом. В средней части вертикального вала на шпонке установлена крестовина 11, на которой шарнирно (на осях) установлены два груза 10 с угловыми рычагами. Горизонтальные плечи рычагов упираются во втулку 9 и во время работы перемещают ее вдоль вертикального вала. Сверху втулка через муфту 8 нагружена двумя пружинами 6 (внешней и внутренней), упирающимися в подпятник 1. Изменение натяжения пружин осуществляется нижней нарезной частью винта 3, который зафиксирован от проворачивания, но может перемещаться в осевом направлении. Перемещение винта вверх — вниз осуществляется при помощи конической шестерни 2, имеющей винтовую нарезку по внутреннему диаметру. Она выполняет роль гайки и приводится во вращение другой конической шестерней 4, при помощи шпонки жестко закрепленной на горизонтальном валу с маховиком 5 на другом его конце. Вращение маховика в ту или другую сторону сопровождается перемещением винта 3 вверх — вниз, что вызывает изменение силы натяжения пружин. Муфта 8 рычажной передачей связана с рейкой топливных насосов высокого давления. На любом установившемся режиме двигателя центробежные силы грузов уравновешиваются действием пружин и двигатель вращается с определенной частотой. При резком сбросе нагрузки и увеличении частоты вращения двигателя выше допустимой работа всережимного регулятора аналогична работе предельного. За счет увеличения частоты вращения грузы 10 расходятся в крайние положения и, преодолевая силу упругости, поднимают втулку 8 и рычаг 7 вверх, тем самым значительно уменьшая подачу топлива в цилиндры. Частота вращения коленчатого вала снижается, центробежные силы грузов уменьшаются и пружины ставят их в положение, близкое к первоначальному. Одновременно с этим подача топлива увеличивается, а частота вращения вновь повышается, но уже на меньшую величину. Так повторяется несколько раз, пока не установится постоянная предельная частота вращения. Чтобы изменить частоту вращения двигателя в интервале «Малый ход» — «Полный ход», необходимо вращать рукоятку маховика 5 в нужную нам сторону. При вращении его по часовой стрелке винт 3 опускается вниз и через подпятник 1 увеличивает натяжение пружин. Необходимо отметить, что на малых и средних оборотах внутренняя пружина находится в свободном состоянии, а действует только одна внешняя. При дальнейшем-повышении частоты вращения в действие вступают обе пружины. Увеличение силы затяжки пружины приводит к сближению грузов, опусканию втулки 8, увеличению подачи топлива и повышению частоты вращения коленчатого вала. Уменьшение частоты вращения двигателя достигается с поста управления вращением маховика против часовой стрелки. В этом случае сила натяжения пружин уменьшается, грузы 10 под действием центробежной силы разойдутся, горизонтальные плечи угловых рычагов поднимут втулку 8, которая, действуя на рычаг 7, уменьшит подачу топлива в цилиндры двигателя.sudoremont.blogspot.com
Применение электронных систем автоматического управления (ЭСАУ двигателем, трансмиссией, ходовой частью и дополнительным оборудованием) позволяет:
снизить расход топлива;
токсичность отработавших газов,
повысить мощность двигателя,
активную безопасность автомобиля,
улучшить условия труда водителя.
Соблюдение требований ограничивающих токсичность отработавших газов и расход топлива требует поддержания стехиометрического состава горючей смеси, отключения подачи топлива на режиме принудительного ХХ, точного и оптимального регулирования момента зажигания или впрыска топлива.
Выполнения этих требований невозможность без использования ЭСАУ.
Применяемые ЭСАУ двигателем включают системы управления:
топливоподачей,
зажиганием (в бензиновых двигателях),
клапанами цилиндров,
рециркуляцией отработавших газов.
Наибольшее распространение получили первые две системы.
Системы управления клапанами применяются для отключения группы цилиндров с целью экономии топлива и для регулирования фаз газораспределения. Системы управления рециркуляцией отработавших газов обеспечивают возврат во впускной трубопровод потребного количества отработавших газов для смешивания их со свежей горючей смесью.
ЭСАУ облегчает пуск холодного двигателя, уменьшает время прогрева перед движения.
Антиблокировочные системы позволяют уменьшить в 2 раза тормозной путь на скользкой дороге, исключая возникновения заноса.
Электронные системы управления топливоподачей бензиновых двигателей
Применение электронных систем автоматического управления (ЭСАУ) топливоподачей бензиновых двигателей обусловлено необходимостью снижения токсичности отработавших газов и повышения топливной экономичности двигателей внутреннего сгорания. ЭСАУ позволяют в большей степени оптимизировать процесс смесеобразования и делают возможным применение трехкомпонентных нейтрализаторов, эффективно работающих при постоянном коэффициенте избытка воздуха а близком к 1.
Кроме того, ЭСАУ двигателем, позволяют повысить приемистость автомобиля, надежность холодного пуска, ускорить прогрев и увеличить мощность двигателя.
ЭСАУ топливоподачей бензиновых двигателей разделяют на системы впрыска (во впускной трубопровод или непосредственно в камеру сгорания) и карбюраторные системы с электронным управлением.
Принцип действия системы электронного управления карбюратором заключается в согласованном управлении воздушной и дроссельной заслонками.
Так система Ecotronic фирмы Bosch поддерживает на большинстве режимов стехиометрический состав рабочей смеси, обеспечивает необходимое обогащение смеси на режимах пуска и прогрева двигателя. В системе предусмотрены функции отключения подачи топлива на принудительном холостом ходу и поддержания на заданном уровне частоты вращения коленчатого вала на холостом ходу.
Наибольшее распространение получили системы впрыска во впускной трубопровод. Они разделяются на системы с впрыском в зону впускных клапанов и с центральным впрыском (рис. 6.1, где: а - центральный впрыск; б - распределенный впрыск в зону впускных клапанов;в - непосредственный впрыск в цилиндры двигателя; 1 - подача топлива; 2 - подача воздуха; 3 - дроссельная заслонка; 4 - впускной трубопровод; 5 - форсунки; 6 - двигатель ).


Рис. 6.1
Система с впрыском в зону впускных клапанов (другое название распределенный или многоточечный впрыск) включает в себя количество форсунок равное числу цилиндров, система с центральным впрыском - одну или две форсунки на весь двигатель. Форсунки в системах с центральным впрыском устанавливаются в специальной смесительной камере, откуда полученная смесь распределяется по цилиндрам. Подача топлива форсунками в системе распределенного впрыска может быть согласована с процессом впуска в каждый цилиндр (фазированный впрыск) и несогласованна - форсунки работают одновременно или группой (нефазированный впрыск).
Системы с непосредственным впрыском из-за сложности конструкции долгое время не применялись на бензиновых двигателях. Однако ужесточение экологических требований к двигателям делает необходимым развитие этих систем.
Современные ЭСАУ двигателем объединяют в себе функции управления впрыском топлива и работой системы зажигания, поскольку принцип управления и входные сигналы (частота вращения, нагрузка, температура двигателя) для этих систем являются общими.
В ЭСАУ двигателем используется программно-адаптивное управление. Для реализации программного управления в ПЗУ блока управления (БУ) записывается зависимость длительности впрыска (количества подаваемого топлива) от нагрузки и частоты вращения коленчатого вала двигателя. На рис. 6.2 представлена обобщенная регулировочная характеристика бензинового двигателя по составу смеси.
Зависимость задается в виде таблицы (характеристической карты) разработанной на основании всесторонних испытаний двигателя. Данные в таблице представлены с определенным шагом, например 5 мин-1, промежуточные значения БУ получает интерполяцией. Аналогичные таблицы используются и для определения угла опережения зажигания. Выбор данных из готовых таблиц является более быстрым процессом, чем выполнение вычислений.

Рис. 6.2.
Непосредственное измерение крутящего момента двигателя на автомобиле связано с большими техническими трудностями, поэтому основным датчиком нагрузки являются датчики расхода воздуха и (или) датчик давления во впускном трубопроводе. Для определения частоты вращения коленчатого вала двигателя обычно используется счетчик импульсов от датчика положения коленчатого вала индукционного типа или от датчика-распределителя системы зажигания.
Полученные по таблицам значения корректируются в зависимости от сигналов датчиков температуры охлаждающей жидкости, положения дроссельной заслонки, температуры воздуха, а также напряжения бортовой сети и других параметров.
Адаптивное управление (управление по обратной связи) используется в системах с датчиком кислорода (λ-зондом). Наличие информации о содержании кислорода в отработавших газах позволяет поддерживать коэффициент избытка воздуха а (λ) близким к 1. При управлении топливоподачей по ОС БУ первоначально определяет длительность импульсов по данным датчиков нагрузки и частоты вращения КВ двигателя, а сигнал от датчика кислорода используется для точной корректировки. Управление впрыском топлива по обратной связи осуществляется только на прогретом двигателе и в определенном диапазоне нагрузки.
Принцип адаптивного управление применяется также для стабилизации частоты вращения коленчатого вала в режиме холостого хода и для управления углом опережения зажигания по пределу детонации.
Современные ЭСАУ топливоподачей бензиновых двигателей имеют функцию самодиагностики. БУ проверяет работу датчиков и исполнительных устройств и идентифицируют неисправности. При обнаружении неисправности БУ заносит в память соответствующий код и включает аварийную лампу CHECK ENGINE на панели приборов.
Диагностический прибор позволяет получать информацию от БУ:
считывать коды неисправностей;
определять текущие значения параметров двигателя,
активизировать исполнительные механизмы.
функции диагностического прибора ограничены возможностями БУ.
Применение ЭСАУ повышает надежность работы двигателя за счет обеспечения возможности его работы в «усеченном» режиме. В случае возникновения неисправности в одном или нескольких датчиках, БУ определяет, что их показания не соответствуют действительности и отключает эти датчики. В «усеченном» режиме работы информация от неисправных датчиков замещается эталонным значением или косвенно рассчитывается по данным от других датчиков. Например, при неисправности датчика положения дроссельной заслонки его показания можно имитировать расчетом по частоте вращения коленчатого вала и расходу воздуха. При выходе из строя одного из исполнительных механизмов используется индивидуальный алгоритм обхода неисправности. При дефекте в цепи зажигания, например, отключается впрыск в соответствующий цилиндр, с целью предотвращения повреждения каталитического нейтрализатора.
При работе двигателя в «усеченном» режиме возможно снижение мощности, ухудшение приемистости, затрудненный пуск холодного двигателя, увеличение расхода топлива и др.
Для компенсации технологического разброса в характеристиках элементов ЭСАУ и двигателя, учета их изменения при эксплуатации в программе БУ предусмотрен алгоритм самообучения. Как упоминалось выше, сигнал от датчика кислорода используется для корректировки значения длительности впрыска полученного по таблице из ПЗУ БУ. Однако при значительных расхождениях такой процесс занимает много времени.
Самообучение заключается в сохранении в памяти БУ значений коэффициента корректировки. Весь диапазон работы двигателя разбивается, как правило, на четыре характерные зоны обучения:
холостой ход, высокая частота вращения при малой нагрузке, частичная нагрузка, высокая нагрузка.
При работе двигателя в любой из зон, происходит корректировка длительности импульсов впрыска до тех пор, пока реальный состав смеси не достигнет оптимального значения. Полученные таким образом коэффициенты корректировки характеризуют конкретный двигатель и участвуют в формировании длительности импульса впрыска на всех режимах его работы. Процесс самообучения применяется также для управления углом опережения зажигания при наличии обратной связи по детонации. Основная проблема функционирования алгоритма самообучения заключается в том, что иногда неправильный сигнал датчика может быть воспринят системой как изменение параметра двигателя. Если ошибка сигнала датчика недостаточно велика, чтобы был зарегистрирован код неисправности, повреждение может остаться необнаруженным. В большинстве систем корректирующие коэффициенты не сохраняются при отключении питания БУ.
studfiles.net

 Министерство образования Российской Федерации
Министерство образования Российской Федерации
САНКТ-ПЕТЕРБУРГСКИЙ
государственный ПОЛИтехнический университет
 |
Ю. В. Галышев Л. Е. Магидович В. В. Румянцев
АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ
УСТАНОВОК С ДВС
Учебное пособие

Санкт-Петербург
Издательство СПбГПУ
2002
Министерство образования Российской Федерации
САНКТ-ПЕТЕРБУРГСКИЙ
государственный ПОЛИтехнический университет
 |
Ю. В. Галышев Л. Е. Магидович В. В. Румянцев
АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ
УСТАНОВОК С ДВС
Учебное пособие
Санкт-Петербург
Издательство СПбГПУ
2002
УДК 621.43 (075.8)
Г а л ы ш е в Ю. В., М а г и д о в и ч Л. Е., Р у м я н ц е в В. В. Автоматизация управления установок с ДВС: Учеб. пособие. СПб.: Изд-во СПбГПУ, 2002. 122 с.
Пособие соответствует государственному образовательному стандарту дисциплины "Автоматизация управления установок с ДВС" специальности инженерной подготовки 101200 "Двигатели внутреннего сгорания".
Изложены принципы действия основных видов автоматических устройств в ДВС, вопросы статики и динамики систем автоматического регулирования скорости ДВС и систем охлаждения установок с двигателями, рассмотрены системы комплексной автоматизации установок с ДВС.
Предназначено для студентов 5 курса энергомашиностроительного факультета, изучающих дисциплину "Автоматизация управления установок с ДВС" в рамках инженерной подготовки.
Ил. 88. Библиогр.: 6 назв.
Печатается по решению редакционно-издательского совета Санкт-Петербургского государственного политехнического университета.
Ó Санкт-Петербургский государственный политехнический университет, 2002
При изучении курса "Автоматизация установок с ДВС" рассматриваются основные устройства и системы автоматизации процессов управления, которые применяются в ДВС, и в установках на базе ДВС (судовых, стационарных и пр.). Проектирование и производство средств автоматизации является в большой степени самостоятельной отраслью и требует значительных специальных знаний, которые, естественно, не могут быть полностью даны в столь ограниченном по объему курсе. Поэтому основное назначение данного курса и предлагаемого пособия – дать хотя бы минимальные знания, которые позволят в дальнейшем ясно представлять, какие требования конструктор-двигателист может и должен предъявлять к разработчикам автоматики, понимать принципы действия основных видов автоматических устройств и то, как их работа влияет на параметры и характеристики двигателя и его систем.
Современная техника не мыслится без самой широкой автоматизации. Двигатель внутреннего сгорания, появившийся сравнительно поздно, изначально был снабжен некоторыми автоматическими устройствами. К примеру, вряд ли кто задумывается о том, что система газораспределения также, по строгому определению, является автоматическим устройством, работающим по принципу прямого управления с заданным алгоритмом. В первых паровых машинах клапаны подачи и отвода пара управлялись вручную. К моменту появления ДВС паровые машины уже снабжались парораспределительным механизмом, и аналогичная система, войдя в ДВС как конструктивный элемент, не воспринимается как элемент автоматики. Аналогично тому, как паровые машины издавна снабжались автоматическими регуляторами скорости, дизельные двигатели изначально снабжались предельным регулятором, который, как мы увидим в дальнейшем, действительно необходим для их надежной работы.
За последние десятилетия автоматизация установок с ДВС шагнула далеко вперед, перейдя от отдельных автоматических устройств к комплексной автоматизации. Еще в конце 50-х годов серьезные научные журналы убеждали судовых механиков в том, что не обязательно своими глазами следить за состоянием подшипников – можно довериться приборам, контролирующим температуру и давление смазки. Сегодня, а точнее еще лет 30 назад, стали обычным делом полностью автоматизированные установки, работающие без всякого обслуживания и контроля под управлением автоматики. Дольше других "сопротивлялись" автоматизации автомобильные установки. Но теперь уже в серийном выпуске автомобили, имеющие комплексное автоматическое управление подачей топлива, газораспределением и системой наддува.
В системах автоматизации двигателей и установок с ДВС используются различные фундаментальные принципы управления, а также принципы действия – непрерывный и дискретный. Теоретические основы проектирования и исследования систем автоматизации изучались в курсе "Теория автоматического управления", поэтому в данном курсе такие понятия, как динамические звенья, структурные схемы, передаточные функции и способы их определения, устойчивость систем и критерии ее оценки, предполагаются известными и будут использоваться далее без дополнительных пояснений.
1. ЗНАЧЕНИЕ АВТОМАТИЗАЦИИ УСТАНОВОК С ДВС. ОСНОВНЫЕ НАПРАВЛЕНИЯ АВТОМАТИЗАЦИИ
vunivere.ru








