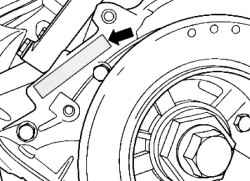
Изобретение относится к области электротехники, а именно к электрическим машинам и может быть использовано в высокомоментных электроприводах. Сущность изобретения состоит в следующем. Вентильный индукторный двигатель, содержащий ротор 1 с зубцами 2 и статор 3 с полюсами 4-15, на внутренней поверхности которых расположено zs элементарных зубцов 16. Зубцовые деления статора 3 и ротора tz выполнены одинаковыми. Расстояние между осями соседних зубцов, принадлежащих соседним полюсам, равно (k 1/2m)tz (k=1, 2 ...), в большие пазы между полюсами уложена m-фазная обмотка 17 двигателя, а в пазы между элементарными зубцами соседних 2mq (q=1, 2 ... p) полюсов уложены катушки m-фазного датчика 18 по одной на каждой половине полюса. Катушки соединены друг с другом определенным образом и составляют катушечные группы, которые образуют ветви. Ветви с катушечными группами на полюсах с порядковыми номерами, различающимися на m, соединены последовательно "конец с концом", а в точках соединения выполнены выводы m-фазного выхода датчика 18. Начала m ветвей, являющиеся началами катушечных групп, расположенных на полюсах с четными и нечетными номерами, соединены вместе, а в точках соединения выполнены выводы однофазного входа датчика 18. При этом согласно изобретению статор 3 двигателя выполнен из 2-х пакетов различной длины, а обмотка датчика 18 расположена на пакете меньшей длины. Данный вентильный индукторный двигатель имеет лучшие энергетические характеристики и меньший уровень пульсации скорости вращения из-за меньшего уровня пульсации момента. 3 ил.
1/2m)tz (k=1, 2 ...), в большие пазы между полюсами уложена m-фазная обмотка 17 двигателя, а в пазы между элементарными зубцами соседних 2mq (q=1, 2 ... p) полюсов уложены катушки m-фазного датчика 18 по одной на каждой половине полюса. Катушки соединены друг с другом определенным образом и составляют катушечные группы, которые образуют ветви. Ветви с катушечными группами на полюсах с порядковыми номерами, различающимися на m, соединены последовательно "конец с концом", а в точках соединения выполнены выводы m-фазного выхода датчика 18. Начала m ветвей, являющиеся началами катушечных групп, расположенных на полюсах с четными и нечетными номерами, соединены вместе, а в точках соединения выполнены выводы однофазного входа датчика 18. При этом согласно изобретению статор 3 двигателя выполнен из 2-х пакетов различной длины, а обмотка датчика 18 расположена на пакете меньшей длины. Данный вентильный индукторный двигатель имеет лучшие энергетические характеристики и меньший уровень пульсации скорости вращения из-за меньшего уровня пульсации момента. 3 ил.
Изобретение относится к области электрических машин и может быть использовано в высокомоментных электроприводах.
Известен вентильный индукторный двигатель, содержащий зубчатый ротор и статор с зубцами, в пазы между которыми уложена m-фазная обмотка двигателя и катушки m-фазного датчика положения, собранные в фазах в последовательные ветви, каждая ветвь образована катушками, смещенными вдоль расточки на угол 360 эл. град, соединенными между собой конец с концом, начало с началом (авт.св. N 1464264, кл. H 02 K 29/06, 1986). Недостатком известного двигателя является ограниченная область применения вследствие низких точностных показателей датчика положения. Известен также вентильный индуктивный двигатель (авт.св. N 1739446, кл. H 02 K 29/06, 1992), содержащий зубчатый ротор и статор с 2mp (p=2, 3, 4.) полюсами, на внутренней поверхности которых расположено по zs элементарных зубцов, причем зубцовые деления tz статора и ротора выполнены одинаковыми, а расстояние между осями соседних элементарных зубцов, принадлежащих соседним полюсам равно (k1/2m)tz(k=1, 2, 3.), в большие пазы между полюсами уложена m-фазная обмотка, а в пазы между элементарными зубцами 2mq (q=1, 2, p) полюсов уложены катушки m-фазного датчика, охватывающие зубцы по всей длине пакета статора, по одной на каждой половине полюса, катушки, расположенные на одном полюсе, соединены последовательно и согласно конец с концом и образуют катушечную группу, катушечные группы, расположенные на полюсах с порядковыми номерами, различающимися на 2m, считая по часовой стрелке вдоль расточки статора соединены последовательно конец с началом и образуют ветви, ветви с катушечными группами, расположенными на полюсах с порядковыми номерами, различающимися на m, соединены последовательно конец с концом и в точках соединения выполнены выводы m-фазного выхода датчика, а начала m ветвей, являющихся началами катушечных групп, расположенных на полюсах с четными и нечетными номерами, соединены вместе и в точках соединения выполнены выводы однофазного входа датчика. Данный вентильный индукторный двигатель является наиболее близким к предлагаемому изобретению и является прототипом. Недостатком такого двигателя является низкая точность датчика положения, что приводит к ухудшению энергетических показателей вентильного двигателя, повышению уровня пульсаций момента и, следовательно, скорости вращения. Анализ приведенного уровня техники свидетельствует о целесообразности создания вентильного индукторного двигателя, имеющего лучшие энергетические показатели, меньший уровень пульсаций момента и скорости вращения. Это достигается тем, что в известном вентильном индукторном двигателе, содержащем зубчатый ротор и статор с 2mp (p=2, 3, 4.) полюсами, на внутренней поверхности которых расположено по zs элементарных зубцов, причем зубцовые деления tz статора и ротора выполнены одинаковыми, а расстояние между осями соседних элементарных зубцов, принадлежащих соседним полюсам равно (k1/2m) (k=1, 2, 3), в большие пазы между полюсами уложена m-фазная обмотка, а в пазы между элементарными зубцами 2mq (q=1, 2, p) полюсов уложены катушки m-фазного датчика по одной на каждой половине полюса, катушки, расположенные на одном полюсе соединены последовательно и согласно конец с концом и образуют катушечную группу, катушечные группы, расположенные на полюсах с порядковыми номерами, различающимися на 2m, считая по часовой стрелке вдоль расточки статора соединены последовательно конец с началом и образуют ветви, ветви с катушечными группами, расположенными на полюсах с порядковыми номерами, различающимися на m соединены последовательно конец с концом и в точках соединения выполнены выводы m-фазного выхода датчика, а начала m ветвей, являющихся началами катушечных групп, расположенных на полюсах с четными номерами соединены вместе и в точках соединения выполнены выводы однофазного входа датчика, статор выполнен из 2-х пакетов различной длины, а обмотка датчика расположена в пазах между зубцами на пакете меньшей длины. На фиг.1 показан поперечный разрез предлагаемого двигателя; на фиг.2 то же, продольный разрез; на фиг.3 схема соединения обмотки датчика. Двигатель (фиг.1) состоит из ротора 1 с зубцами 2 и статора 3 с полюсами 4-15, на внутренней поверхности которых выполнены зубцы 16. Зубцовые деления tz статора и ротора одинаковые, расстояние между осями соседних зубцов, принадлежащих разным полюсам статора, равно (1+ 1/2m)tz (k=1). В большие пазы между полюсами уложена m-фазная обмотка 17. Статор 3 (фиг.2) выполнен из 2-х пакетов различной длины. Обмотка двигателя 17 охватывает оба пакета, а m-фазная обмотка датчика 18 уложена только в пазы между зубцами 16 на пакете меньшей длины. Пакеты разделены дистанционным кольцом 19. На одном полюсе расположено по 2 катушки датчика так, что каждая катушка охватывает половину полюса. Две катушки датчика, расположенные на одном полюсе, соединенные последовательно согласно конец с концом, образуют катушечные группы 20-31 (фиг.3). Катушечные группы 20-31 с номерами, отличающимися на 2m=6, например 20, 26; 21, 27 и т.д. соединены последовательно конец с началом и образуют ветви. На фиг.1 принято, что катушечная группа 20 уложена на полюсе 4, катушечная группа 21 на полюсе 5 и т.д. Ветви с катушечными группами, имеющими номера, отличающиеся на m=3, например 20, 26 и 23, 29, соединены последовательно конец с концом и в точках соединения ветвей выполнены выводы трехфазного выхода A, B, C. Начала m=3 ветвей с нечетными номерами, т.е. с катушечными группами 29, 31, 21 соединены вместе и в точке соединения выполнен первый вывод однофазного входа, оставшиеся начала m=3 ветвей с катушечными группами 20, 22, 24 также соединены вместе и в точке их соединения выполнен второй вывод однофазного входа (фиг.3). Двигатель работает следующим образом. При подаче напряжения высокой частоты  на однофазный вход датчика по ветвям, образованным катушечными группами 20-31, протекают токи. Благодаря сдвигу осей зубцов на соседних полюсах tz/2m, общее индуктивное сопротивление 2-х последовательно включенных ветвей, например, состоящих из катушечных групп 20, 26 и 23, 29, остается неизменным, но потенциал фазы A меняется в зависимости от положения ротора, т. к. при увеличении индуктивного сопротивления ветви 20, 26 до максимального значения, индуктивное сопротивление катушечных групп 23, 29 снижается до минимально возможного значения. В результате, при вращении ротора с частотой wp потенциал фазы A будет меняться по закону UA=Umsint
на однофазный вход датчика по ветвям, образованным катушечными группами 20-31, протекают токи. Благодаря сдвигу осей зубцов на соседних полюсах tz/2m, общее индуктивное сопротивление 2-х последовательно включенных ветвей, например, состоящих из катушечных групп 20, 26 и 23, 29, остается неизменным, но потенциал фазы A меняется в зависимости от положения ротора, т. к. при увеличении индуктивного сопротивления ветви 20, 26 до максимального значения, индуктивное сопротивление катушечных групп 23, 29 снижается до минимально возможного значения. В результате, при вращении ротора с частотой wp потенциал фазы A будет меняться по закону UA=Umsint sinZ2pt где Z2 число зубцов ротора, а потенциалы фаз B и C окажутся сдвинутыми относительно UA на угол 120 эл.град. Меняющиеся от положения ротора UA, UB, UC используются для коммутации m-фазной обмотки двигателя 17. В сравнении с прототипом предлагаемый вентильный двигатель имеет более высокие энергетические показатели, меньший уровень пульсаций момента и скорости вращения. Это объясняется следующим. При идеальном исполнении магнитопровода, схема включения катушек датчика в пределах полюса компенсирует влияние магнитных полей обмотки двигателя и полностью устраняет трансформаторную связь обмоток датчика и двигателя как в прототипе, так и в предлагаемом вентильном двигателе. Однако неточности изготовления (например, асимметрия полюсов, отклонение по шагу зубцов в пределах полюса и т.д.) способствует появлению трансформаторной связи и является, в конечном счете, причиной ухудшения точностных показателей датчика. Последнее означает, что коммутация токов в обмотках двигателя будет происходить с отклонениями от требуемых законов управления и, в свою очередь, приведет к снижению момента, ухудшению энергетических показателей и колебаниям частоты вращения. В отличие от прототипа, в предлагаемом вентильном двигателе обмотки датчика размещаются не по всей длине машины, а на одном из пакетов меньшей длины. Поэтому если принять, что напряжение питания и ток в фазе двигателя, а также входное напряжение и ток датчика в предлагаемом вентильном двигателе и в прототипе неизменны, то уменьшение активной длины витка произвольно взятой катушки датчика ведет к снижению ее трансформаторной связи с обмотками двигателя в
sinZ2pt где Z2 число зубцов ротора, а потенциалы фаз B и C окажутся сдвинутыми относительно UA на угол 120 эл.град. Меняющиеся от положения ротора UA, UB, UC используются для коммутации m-фазной обмотки двигателя 17. В сравнении с прототипом предлагаемый вентильный двигатель имеет более высокие энергетические показатели, меньший уровень пульсаций момента и скорости вращения. Это объясняется следующим. При идеальном исполнении магнитопровода, схема включения катушек датчика в пределах полюса компенсирует влияние магнитных полей обмотки двигателя и полностью устраняет трансформаторную связь обмоток датчика и двигателя как в прототипе, так и в предлагаемом вентильном двигателе. Однако неточности изготовления (например, асимметрия полюсов, отклонение по шагу зубцов в пределах полюса и т.д.) способствует появлению трансформаторной связи и является, в конечном счете, причиной ухудшения точностных показателей датчика. Последнее означает, что коммутация токов в обмотках двигателя будет происходить с отклонениями от требуемых законов управления и, в свою очередь, приведет к снижению момента, ухудшению энергетических показателей и колебаниям частоты вращения. В отличие от прототипа, в предлагаемом вентильном двигателе обмотки датчика размещаются не по всей длине машины, а на одном из пакетов меньшей длины. Поэтому если принять, что напряжение питания и ток в фазе двигателя, а также входное напряжение и ток датчика в предлагаемом вентильном двигателе и в прототипе неизменны, то уменьшение активной длины витка произвольно взятой катушки датчика ведет к снижению ее трансформаторной связи с обмотками двигателя в  раз (l общая длина 2-х пакетов статора, lп длина пакета, на котором размещены обмотки датчика). Уменьшение трансформаторной связи между отдельно взятой катушкой датчика и обмотками двигателя приводит к уменьшению трансформаторной связи между всеми обмотками датчика и двигателя (обусловленной неточностями изготовления). Следовательно, при прочих равных условиях датчик в предлагаемом вентильном двигателе точнее, а это, как отмечалось выше, приводит к повышению энергетических показателей, увеличению момента и снижению пульсаций скорости.
раз (l общая длина 2-х пакетов статора, lп длина пакета, на котором размещены обмотки датчика). Уменьшение трансформаторной связи между отдельно взятой катушкой датчика и обмотками двигателя приводит к уменьшению трансформаторной связи между всеми обмотками датчика и двигателя (обусловленной неточностями изготовления). Следовательно, при прочих равных условиях датчик в предлагаемом вентильном двигателе точнее, а это, как отмечалось выше, приводит к повышению энергетических показателей, увеличению момента и снижению пульсаций скорости.Формула изобретения
Вентильный индукторный двигатель, содержащий зубчатый ротор и статор с 2mP (P 2, 3, 4,) полюсами, на внутренней поверхности которых расположено по Zs элементарных зубцов, причем зубцовые деления статора и ротора tz выполнены одинаковыми, а расстояние между осями соседних зубцов, принадлежащих соседним полюсам, равно (K 1/2 m) (K 1, 2,), в большие пазы между полюсами уложена m-фазная обмотка двигателя, а в пазы между элементарными зубцами соседних 2mq (q 1, 2, P) полюсов уложены катушки m-фазного датчика по одной на каждой половине полюса, катушки, расположенные на одном полюсе, соединены последовательно и согласно конец с концом и образуют катушечную группу, катушечные группы, расположенные на полюсах с порядковыми номерами, различающимися на 2m, считая по часовой стрелке вдоль расточки статора, соединены последовательно конец с началом и образуют ветви, ветви с катушечными группами, расположенными на полюсах с порядковыми номерами, различающимися на m, соединены последовательно конец с концом, и в точках соединения выполнены выводы m-фазного выхода датчика, а начала m ветвей, являющиеся началами катушечных групп, расположенных на полюсах с четными и нечетными номерами, соединены вместе, и в точках соединения выполнены выводы однофазного входа датчика, отличающийся тем, что статор двигателя выполнен из двух пакетов различной длины, а обмотка датчика расположена на пакете меньшей длины.РИСУНКИ
Рисунок 1, Рисунок 2, Рисунок 3www.findpatent.ru
Изобретение относится к электротехнике , а именно к вентильным индукторным двигателям. Целью изобретения является улучшение энергетических и удельн х массогабаритных показателей. Статор индукторного двигателя выполнен из двух частей, охватывающих ротор с двух сторон и обращенных полюсами к его зубчатым поверхностям , а катушки обмоток возбуждения и якоря, одинаково расположенные на обеих частях статора и охватывающие по два полюса статора, соединены таким образом, что создаваемые одноименными катушками магнитные потоки пересекают ротор в направлении , перпендикулярном его зубчатым поверхностям. Кроме того, в данном вентильном электродвигателе исключен датчик положения ротора как самостоятельный элемент, а его функции выполняет дополнительная обмотка, -уложенная в пазы статора силовой части двигателя таким образом, что магнитный поток от одноименных катушек датчика одновременно входит в ротор или выходит из него. 3 ил. S (/)
СОЮЗ СОВЕТСНИХ
СОЦИАЛИСТИЧЕСНИХ
PECAlYEiËÈH (51)4 Н 02 К 29/06 р (р и ! г!;, МП Л:." ь -, ОПИСАНИЕ ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
ГОСУДАРСТВЕННЫЙ КОМИТЕТ
ПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМ
ПРИ ГННТ СССР (21) 4284 136/24-07 (22) 13.07.87 (46) 07.03.89. Бюл. Р 9 (?2) А.В.Демагин, Л.А.Дмитриев, В.А.Зверев, Б.С.Зильберман и О.В.Солдатов (53) 621.313.2.92(088.8) (56) Патент Японии ll 50-39803, кл. 55 А 42, 1975.
Авторское свидетельство СССР
N! 1?57774, кл. Н 02 К 29/12, 1985. (54) ВЕНТИЛЬНЫЙ ИНДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ (57) Изобретение относится к электротехнике, а именно к вентильным индукторным двигателям. Целью изобретения является улучшение энергети-! ческих и удельнйх массогабаритных показателей, Статор индукторного двигателя выполнен иэ двух частей, охl
Изобретение относится к электротехнике, а именно к бесконтактным электродвигателям постоянного тока с полупроводниковыми коммутаторами, управляемыми датчиками углового положения ротора (ДПР), т.е. к вентильным электродвигателям (ВД), и может быть применено в качестве исполнительного электродвигателя. в автоматизированных электроприводах.
Целью изобретения является повы- ° шение энергетических и удельных массогабаритных показателей.
На фиг. 1 показана развертка статора ротора электромеханического преобразователя, в торцовом исполнении на фиг. ?. — конструкция злектромехани„,Я0„„464264 А 1 ватывающих ротор с двух сторон и обращенных полюсами к его зубчатым поверхностям, а катушки обмоток возбужду дения и якоря, одинаково расположенные на обеих частях статора и охватывающие по два полюса статора, соединены таким образом, что создаваемые одноименными катушками магнитные потоки пересекают ротор в направлении, перпендикулярном его зубчатым поверхностям. Кроме того, в данном вентильном электродвигателе исключен датчик положения ротора как самостоятельный элемент, а его функции выполняет дополнительная обмотка, уложенная в пазы статора силовой части двигателя таким образом, что магнитный поток от одноименных катушек датчика одновременно входит в ротор или выходит из него. 3 ил. ческого преобразователя на фиг, 3 схема силовых обмоток электромеханического преобразователя ДПР.
Электромеханический преобразова,тель содержит ротор и статор с паза ми 1. В пазах статора, состоящего из двух частей 2 и 3 с зубчатыми полюсами 4, уложены катушки 5 обмотки возбуждения (О"I, 0"Г") и обмотки яко(А/ Х, В! У, С1 К, А!!Х!! В!!У!!, С"Z") силовой части, катушки обмотки возбуждения (о,f,,о"f") и выходных обмоток (а х, Ь у, с к,, а"х", Ь" ", с!!х!!) ДПР.
ВД работает следующим образом.
При подаче на обмотку возбуждения
ДПР переменного напряжения высокой
3 14 частоты магнитные потоки, создаваемые катушками этой обмотки, охватывающими по два полюса, сцепляются с катушками выходных обмоток ДПР каждая иэ которых охватывает также по два по люса. В результате этого в катушках выходных обмоток навсдятся ЭДС взаимоиндукции, амплитуды которых при вращении ротора изменяются в соответ" ствии с изменением магниткой проводи-! мости воздушного зазора между полюсами статора и ротором. Такое соединение обмоток силовой части и.катушек
:информационной части ДПР исключает .индуктивную связь между обмотками этих частей и обеспечивает периодическое изменение модулированных ЭДС выходных обмоток ДПР сдвинутых отно(2 сительно друг друга на фазовый угол
1 2Г/3 эл.град. и имеющих нулевое значение при повороте ротора на каждую половину зубцового деления ротора с ( изменением после каждого такого нулевого значения фазы напряжения несу щей частоты Т эл .град. Полученная сис тема трехфазных ЭДС несет в себе ин1 формацию об угловом положении ротора
ВД. При подключении обмотки возбуждения силовой части к источнику пос1 тоянного напряжения, а обмотки якоря, силовой части — к выходу полупроводникового .коммутатора, токи в фазах ,изменяются в соответствии с изменением. угла поворота ротора, создавая вращающий момент. Расположение и сое- . динение катушек обмоток силовой и информационной частей согласно фиг. 3 обеспечивает нулевое значение угла цлуальной установки ДПР.
При коммутации якорных обмоток суммарная ЭДС,трансформируемая в сиг1 нальные обмотки, равна нулю, поскольку ЭДС катушек, расположенных на раз64264 4 ных половинах статора, направлены встречно.
Таким образом, суммарная ЭДС высокой частоты, наводимая в обмотках электромеханического преобразователя, равна нулю,,т,е. обеспечивается отсутствие электромагнитной связи между информационными и силовыми цепями.
Ф ор мул а и з о бр е т е ни я
Вентильный индукторный электродвигатель, содержащий электромехани:ческий преобразователь с безобмоточным зубчатым ротором, на зубчатых полюсах магнитопровода которого расположены обмотка возбуждения и трехфазная обмотка якоря, датчик углового положения ротора, выполненный в виде первичной однофазной и вторичной многофазной обмоток, расположенных на магнитопроводе статора, и электронный коммутатор, управляющие цепи которого связаны с выходом датчика положения ротора, о т л и ч а ю—
2В шийся ° тем, что, с целью улучшения энергетических и удельных массогабаритных показателей электродвигателя путем функционально- конструктивного совмещения силовой и информационной частей, его статор выполнен из двух частей, расположенных с двух сторон ротора и обращенных полюсами к его двум зубчатым поверхностям,. одноименные катушки возбуждения и яко.ря одинаково расположены на обоих
35 частях статора, соединены согласно, первичная обмотка и трехфазная вторичная обмотка датчика .углового поло- с жения ротора выполнены из катушек
40 одинаково уложенных в тех же пазах статора двух его частей, в которых расположены обмотки возбуждения и обмотки якоря электродвигателя, и соединены между собой встречно.
1464264
tug 2 с Iraqi a
Составитель А.Санталов
Редактор А.Ворович Техред М.Дидык Корректор О. Кравцова
Заказ 831/57 Тираж 645 Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР
113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат "Патент", г.ужгород, ул. Гагарина, 101



www.findpatent.ru
 1/2m)tz (k=1, 2 ...), в большие пазы между полюсами уложена m-фазная обмотка 17 двигателя, а в пазы между элементарными зубцами соседних 2mq (q=1, 2 ... p) полюсов уложены катушки m-фазного датчика 18 по одной на каждой половине полюса. Катушки соединены друг с другом определенным образом и составляют катушечные группы, которые образуют ветви. Ветви с катушечными группами на полюсах с порядковыми номерами, различающимися на m, соединены последовательно "конец с концом", а в точках соединения выполнены выводы m-фазного выхода датчика 18. Начала m ветвей, являющиеся началами катушечных групп, расположенных на полюсах с четными и нечетными номерами, соединены вместе, а в точках соединения выполнены выводы однофазного входа датчика 18. При этом согласно изобретению статор 3 двигателя выполнен из 2-х пакетов различной длины, а обмотка датчика 18 расположена на пакете меньшей длины. Данный вентильный индукторный двигатель имеет лучшие энергетические характеристики и меньший уровень пульсации скорости вращения из-за меньшего уровня пульсации момента. 3 ил. Изобретение относится к области электрических машин и может быть использовано в высокомоментных электроприводах. Известен вентильный индукторный двигатель, содержащий зубчатый ротор и статор с зубцами, в пазы между которыми уложена m-фазная обмотка двигателя и катушки m-фазного датчика положения, собранные в фазах в последовательные ветви, каждая ветвь образована катушками, смещенными вдоль расточки на угол 360 эл. град, соединенными между собой конец с концом, начало с началом (авт.св. N 1464264, кл. H 02 K 29/06, 1986). Недостатком известного двигателя является ограниченная область применения вследствие низких точностных показателей датчика положения. Известен также вентильный индуктивный двигатель (авт.св. N 1739446, кл. H 02 K 29/06, 1992), содержащий зубчатый ротор и статор с 2mp (p=2, 3, 4.) полюсами, на внутренней поверхности которых расположено по zs элементарных зубцов, причем зубцовые деления tz статора и ротора выполнены одинаковыми, а расстояние между осями соседних элементарных зубцов, принадлежащих соседним полюсам равно (k1/2m)tz(k=1, 2, 3.), в большие пазы между полюсами уложена m-фазная обмотка, а в пазы между элементарными зубцами 2mq (q=1, 2, p) полюсов уложены катушки m-фазного датчика, охватывающие зубцы по всей длине пакета статора, по одной на каждой половине полюса, катушки, расположенные на одном полюсе, соединены последовательно и согласно конец с концом и образуют катушечную группу, катушечные группы, расположенные на полюсах с порядковыми номерами, различающимися на 2m, считая по часовой стрелке вдоль расточки статора соединены последовательно конец с началом и образуют ветви, ветви с катушечными группами, расположенными на полюсах с порядковыми номерами, различающимися на m, соединены последовательно конец с концом и в точках соединения выполнены выводы m-фазного выхода датчика, а начала m ветвей, являющихся началами катушечных групп, расположенных на полюсах с четными и нечетными номерами, соединены вместе и в точках соединения выполнены выводы однофазного входа датчика. Данный вентильный индукторный двигатель является наиболее близким к предлагаемому изобретению и является прототипом. Недостатком такого двигателя является низкая точность датчика положения, что приводит к ухудшению энергетических показателей вентильного двигателя, повышению уровня пульсаций момента и, следовательно, скорости вращения. Анализ приведенного уровня техники свидетельствует о целесообразности создания вентильного индукторного двигателя, имеющего лучшие энергетические показатели, меньший уровень пульсаций момента и скорости вращения. Это достигается тем, что в известном вентильном индукторном двигателе, содержащем зубчатый ротор и статор с 2mp (p=2, 3, 4.) полюсами, на внутренней поверхности которых расположено по zs элементарных зубцов, причем зубцовые деления tz статора и ротора выполнены одинаковыми, а расстояние между осями соседних элементарных зубцов, принадлежащих соседним полюсам равно (k1/2m) (k=1, 2, 3), в большие пазы между полюсами уложена m-фазная обмотка, а в пазы между элементарными зубцами 2mq (q=1, 2, p) полюсов уложены катушки m-фазного датчика по одной на каждой половине полюса, катушки, расположенные на одном полюсе соединены последовательно и согласно конец с концом и образуют катушечную группу, катушечные группы, расположенные на полюсах с порядковыми номерами, различающимися на 2m, считая по часовой стрелке вдоль расточки статора соединены последовательно конец с началом и образуют ветви, ветви с катушечными группами, расположенными на полюсах с порядковыми номерами, различающимися на m соединены последовательно конец с концом и в точках соединения выполнены выводы m-фазного выхода датчика, а начала m ветвей, являющихся началами катушечных групп, расположенных на полюсах с четными номерами соединены вместе и в точках соединения выполнены выводы однофазного входа датчика, статор выполнен из 2-х пакетов различной длины, а обмотка датчика расположена в пазах между зубцами на пакете меньшей длины. На фиг.1 показан поперечный разрез предлагаемого двигателя; на фиг.2 то же, продольный разрез; на фиг.3 схема соединения обмотки датчика. Двигатель (фиг.1) состоит из ротора 1 с зубцами 2 и статора 3 с полюсами 4-15, на внутренней поверхности которых выполнены зубцы 16. Зубцовые деления tz статора и ротора одинаковые, расстояние между осями соседних зубцов, принадлежащих разным полюсам статора, равно (1+ 1/2m)tz (k=1). В большие пазы между полюсами уложена m-фазная обмотка 17. Статор 3 (фиг.2) выполнен из 2-х пакетов различной длины. Обмотка двигателя 17 охватывает оба пакета, а m-фазная обмотка датчика 18 уложена только в пазы между зубцами 16 на пакете меньшей длины. Пакеты разделены дистанционным кольцом 19. На одном полюсе расположено по 2 катушки датчика так, что каждая катушка охватывает половину полюса. Две катушки датчика, расположенные на одном полюсе, соединенные последовательно согласно конец с концом, образуют катушечные группы 20-31 (фиг.3). Катушечные группы 20-31 с номерами, отличающимися на 2m=6, например 20, 26; 21, 27 и т.д. соединены последовательно конец с началом и образуют ветви. На фиг.1 принято, что катушечная группа 20 уложена на полюсе 4, катушечная группа 21 на полюсе 5 и т.д. Ветви с катушечными группами, имеющими номера, отличающиеся на m=3, например 20, 26 и 23, 29, соединены последовательно конец с концом и в точках соединения ветвей выполнены выводы трехфазного выхода A, B, C. Начала m=3 ветвей с нечетными номерами, т.е. с катушечными группами 29, 31, 21 соединены вместе и в точке соединения выполнен первый вывод однофазного входа, оставшиеся начала m=3 ветвей с катушечными группами 20, 22, 24 также соединены вместе и в точке их соединения выполнен второй вывод однофазного входа (фиг.3). Двигатель работает следующим образом. При подаче напряжения высокой частоты
1/2m)tz (k=1, 2 ...), в большие пазы между полюсами уложена m-фазная обмотка 17 двигателя, а в пазы между элементарными зубцами соседних 2mq (q=1, 2 ... p) полюсов уложены катушки m-фазного датчика 18 по одной на каждой половине полюса. Катушки соединены друг с другом определенным образом и составляют катушечные группы, которые образуют ветви. Ветви с катушечными группами на полюсах с порядковыми номерами, различающимися на m, соединены последовательно "конец с концом", а в точках соединения выполнены выводы m-фазного выхода датчика 18. Начала m ветвей, являющиеся началами катушечных групп, расположенных на полюсах с четными и нечетными номерами, соединены вместе, а в точках соединения выполнены выводы однофазного входа датчика 18. При этом согласно изобретению статор 3 двигателя выполнен из 2-х пакетов различной длины, а обмотка датчика 18 расположена на пакете меньшей длины. Данный вентильный индукторный двигатель имеет лучшие энергетические характеристики и меньший уровень пульсации скорости вращения из-за меньшего уровня пульсации момента. 3 ил. Изобретение относится к области электрических машин и может быть использовано в высокомоментных электроприводах. Известен вентильный индукторный двигатель, содержащий зубчатый ротор и статор с зубцами, в пазы между которыми уложена m-фазная обмотка двигателя и катушки m-фазного датчика положения, собранные в фазах в последовательные ветви, каждая ветвь образована катушками, смещенными вдоль расточки на угол 360 эл. град, соединенными между собой конец с концом, начало с началом (авт.св. N 1464264, кл. H 02 K 29/06, 1986). Недостатком известного двигателя является ограниченная область применения вследствие низких точностных показателей датчика положения. Известен также вентильный индуктивный двигатель (авт.св. N 1739446, кл. H 02 K 29/06, 1992), содержащий зубчатый ротор и статор с 2mp (p=2, 3, 4.) полюсами, на внутренней поверхности которых расположено по zs элементарных зубцов, причем зубцовые деления tz статора и ротора выполнены одинаковыми, а расстояние между осями соседних элементарных зубцов, принадлежащих соседним полюсам равно (k1/2m)tz(k=1, 2, 3.), в большие пазы между полюсами уложена m-фазная обмотка, а в пазы между элементарными зубцами 2mq (q=1, 2, p) полюсов уложены катушки m-фазного датчика, охватывающие зубцы по всей длине пакета статора, по одной на каждой половине полюса, катушки, расположенные на одном полюсе, соединены последовательно и согласно конец с концом и образуют катушечную группу, катушечные группы, расположенные на полюсах с порядковыми номерами, различающимися на 2m, считая по часовой стрелке вдоль расточки статора соединены последовательно конец с началом и образуют ветви, ветви с катушечными группами, расположенными на полюсах с порядковыми номерами, различающимися на m, соединены последовательно конец с концом и в точках соединения выполнены выводы m-фазного выхода датчика, а начала m ветвей, являющихся началами катушечных групп, расположенных на полюсах с четными и нечетными номерами, соединены вместе и в точках соединения выполнены выводы однофазного входа датчика. Данный вентильный индукторный двигатель является наиболее близким к предлагаемому изобретению и является прототипом. Недостатком такого двигателя является низкая точность датчика положения, что приводит к ухудшению энергетических показателей вентильного двигателя, повышению уровня пульсаций момента и, следовательно, скорости вращения. Анализ приведенного уровня техники свидетельствует о целесообразности создания вентильного индукторного двигателя, имеющего лучшие энергетические показатели, меньший уровень пульсаций момента и скорости вращения. Это достигается тем, что в известном вентильном индукторном двигателе, содержащем зубчатый ротор и статор с 2mp (p=2, 3, 4.) полюсами, на внутренней поверхности которых расположено по zs элементарных зубцов, причем зубцовые деления tz статора и ротора выполнены одинаковыми, а расстояние между осями соседних элементарных зубцов, принадлежащих соседним полюсам равно (k1/2m) (k=1, 2, 3), в большие пазы между полюсами уложена m-фазная обмотка, а в пазы между элементарными зубцами 2mq (q=1, 2, p) полюсов уложены катушки m-фазного датчика по одной на каждой половине полюса, катушки, расположенные на одном полюсе соединены последовательно и согласно конец с концом и образуют катушечную группу, катушечные группы, расположенные на полюсах с порядковыми номерами, различающимися на 2m, считая по часовой стрелке вдоль расточки статора соединены последовательно конец с началом и образуют ветви, ветви с катушечными группами, расположенными на полюсах с порядковыми номерами, различающимися на m соединены последовательно конец с концом и в точках соединения выполнены выводы m-фазного выхода датчика, а начала m ветвей, являющихся началами катушечных групп, расположенных на полюсах с четными номерами соединены вместе и в точках соединения выполнены выводы однофазного входа датчика, статор выполнен из 2-х пакетов различной длины, а обмотка датчика расположена в пазах между зубцами на пакете меньшей длины. На фиг.1 показан поперечный разрез предлагаемого двигателя; на фиг.2 то же, продольный разрез; на фиг.3 схема соединения обмотки датчика. Двигатель (фиг.1) состоит из ротора 1 с зубцами 2 и статора 3 с полюсами 4-15, на внутренней поверхности которых выполнены зубцы 16. Зубцовые деления tz статора и ротора одинаковые, расстояние между осями соседних зубцов, принадлежащих разным полюсам статора, равно (1+ 1/2m)tz (k=1). В большие пазы между полюсами уложена m-фазная обмотка 17. Статор 3 (фиг.2) выполнен из 2-х пакетов различной длины. Обмотка двигателя 17 охватывает оба пакета, а m-фазная обмотка датчика 18 уложена только в пазы между зубцами 16 на пакете меньшей длины. Пакеты разделены дистанционным кольцом 19. На одном полюсе расположено по 2 катушки датчика так, что каждая катушка охватывает половину полюса. Две катушки датчика, расположенные на одном полюсе, соединенные последовательно согласно конец с концом, образуют катушечные группы 20-31 (фиг.3). Катушечные группы 20-31 с номерами, отличающимися на 2m=6, например 20, 26; 21, 27 и т.д. соединены последовательно конец с началом и образуют ветви. На фиг.1 принято, что катушечная группа 20 уложена на полюсе 4, катушечная группа 21 на полюсе 5 и т.д. Ветви с катушечными группами, имеющими номера, отличающиеся на m=3, например 20, 26 и 23, 29, соединены последовательно конец с концом и в точках соединения ветвей выполнены выводы трехфазного выхода A, B, C. Начала m=3 ветвей с нечетными номерами, т.е. с катушечными группами 29, 31, 21 соединены вместе и в точке соединения выполнен первый вывод однофазного входа, оставшиеся начала m=3 ветвей с катушечными группами 20, 22, 24 также соединены вместе и в точке их соединения выполнен второй вывод однофазного входа (фиг.3). Двигатель работает следующим образом. При подаче напряжения высокой частоты  на однофазный вход датчика по ветвям, образованным катушечными группами 20-31, протекают токи. Благодаря сдвигу осей зубцов на соседних полюсах tz/2m, общее индуктивное сопротивление 2-х последовательно включенных ветвей, например, состоящих из катушечных групп 20, 26 и 23, 29, остается неизменным, но потенциал фазы A меняется в зависимости от положения ротора, т. к. при увеличении индуктивного сопротивления ветви 20, 26 до максимального значения, индуктивное сопротивление катушечных групп 23, 29 снижается до минимально возможного значения. В результате, при вращении ротора с частотой wp потенциал фазы A будет меняться по закону UA=Umsint
на однофазный вход датчика по ветвям, образованным катушечными группами 20-31, протекают токи. Благодаря сдвигу осей зубцов на соседних полюсах tz/2m, общее индуктивное сопротивление 2-х последовательно включенных ветвей, например, состоящих из катушечных групп 20, 26 и 23, 29, остается неизменным, но потенциал фазы A меняется в зависимости от положения ротора, т. к. при увеличении индуктивного сопротивления ветви 20, 26 до максимального значения, индуктивное сопротивление катушечных групп 23, 29 снижается до минимально возможного значения. В результате, при вращении ротора с частотой wp потенциал фазы A будет меняться по закону UA=Umsint sinZ2pt где Z2 число зубцов ротора, а потенциалы фаз B и C окажутся сдвинутыми относительно UA на угол 120 эл.град. Меняющиеся от положения ротора UA, UB, UC используются для коммутации m-фазной обмотки двигателя 17. В сравнении с прототипом предлагаемый вентильный двигатель имеет более высокие энергетические показатели, меньший уровень пульсаций момента и скорости вращения. Это объясняется следующим. При идеальном исполнении магнитопровода, схема включения катушек датчика в пределах полюса компенсирует влияние магнитных полей обмотки двигателя и полностью устраняет трансформаторную связь обмоток датчика и двигателя как в прототипе, так и в предлагаемом вентильном двигателе. Однако неточности изготовления (например, асимметрия полюсов, отклонение по шагу зубцов в пределах полюса и т.д.) способствует появлению трансформаторной связи и является, в конечном счете, причиной ухудшения точностных показателей датчика. Последнее означает, что коммутация токов в обмотках двигателя будет происходить с отклонениями от требуемых законов управления и, в свою очередь, приведет к снижению момента, ухудшению энергетических показателей и колебаниям частоты вращения. В отличие от прототипа, в предлагаемом вентильном двигателе обмотки датчика размещаются не по всей длине машины, а на одном из пакетов меньшей длины. Поэтому если принять, что напряжение питания и ток в фазе двигателя, а также входное напряжение и ток датчика в предлагаемом вентильном двигателе и в прототипе неизменны, то уменьшение активной длины витка произвольно взятой катушки датчика ведет к снижению ее трансформаторной связи с обмотками двигателя в
sinZ2pt где Z2 число зубцов ротора, а потенциалы фаз B и C окажутся сдвинутыми относительно UA на угол 120 эл.град. Меняющиеся от положения ротора UA, UB, UC используются для коммутации m-фазной обмотки двигателя 17. В сравнении с прототипом предлагаемый вентильный двигатель имеет более высокие энергетические показатели, меньший уровень пульсаций момента и скорости вращения. Это объясняется следующим. При идеальном исполнении магнитопровода, схема включения катушек датчика в пределах полюса компенсирует влияние магнитных полей обмотки двигателя и полностью устраняет трансформаторную связь обмоток датчика и двигателя как в прототипе, так и в предлагаемом вентильном двигателе. Однако неточности изготовления (например, асимметрия полюсов, отклонение по шагу зубцов в пределах полюса и т.д.) способствует появлению трансформаторной связи и является, в конечном счете, причиной ухудшения точностных показателей датчика. Последнее означает, что коммутация токов в обмотках двигателя будет происходить с отклонениями от требуемых законов управления и, в свою очередь, приведет к снижению момента, ухудшению энергетических показателей и колебаниям частоты вращения. В отличие от прототипа, в предлагаемом вентильном двигателе обмотки датчика размещаются не по всей длине машины, а на одном из пакетов меньшей длины. Поэтому если принять, что напряжение питания и ток в фазе двигателя, а также входное напряжение и ток датчика в предлагаемом вентильном двигателе и в прототипе неизменны, то уменьшение активной длины витка произвольно взятой катушки датчика ведет к снижению ее трансформаторной связи с обмотками двигателя в  раз (l общая длина 2-х пакетов статора, lп длина пакета, на котором размещены обмотки датчика). Уменьшение трансформаторной связи между отдельно взятой катушкой датчика и обмотками двигателя приводит к уменьшению трансформаторной связи между всеми обмотками датчика и двигателя (обусловленной неточностями изготовления). Следовательно, при прочих равных условиях датчик в предлагаемом вентильном двигателе точнее, а это, как отмечалось выше, приводит к повышению энергетических показателей, увеличению момента и снижению пульсаций скорости. 1/2 m) (K 1, 2,), в большие пазы между полюсами уложена m-фазная обмотка двигателя, а в пазы между элементарными зубцами соседних 2mq (q 1, 2, P) полюсов уложены катушки m-фазного датчика по одной на каждой половине полюса, катушки, расположенные на одном полюсе, соединены последовательно и согласно конец с концом и образуют катушечную группу, катушечные группы, расположенные на полюсах с порядковыми номерами, различающимися на 2m, считая по часовой стрелке вдоль расточки статора, соединены последовательно конец с началом и образуют ветви, ветви с катушечными группами, расположенными на полюсах с порядковыми номерами, различающимися на m, соединены последовательно конец с концом, и в точках соединения выполнены выводы m-фазного выхода датчика, а начала m ветвей, являющиеся началами катушечных групп, расположенных на полюсах с четными и нечетными номерами, соединены вместе, и в точках соединения выполнены выводы однофазного входа датчика, отличающийся тем, что статор двигателя выполнен из двух пакетов различной длины, а обмотка датчика расположена на пакете меньшей длины.
раз (l общая длина 2-х пакетов статора, lп длина пакета, на котором размещены обмотки датчика). Уменьшение трансформаторной связи между отдельно взятой катушкой датчика и обмотками двигателя приводит к уменьшению трансформаторной связи между всеми обмотками датчика и двигателя (обусловленной неточностями изготовления). Следовательно, при прочих равных условиях датчик в предлагаемом вентильном двигателе точнее, а это, как отмечалось выше, приводит к повышению энергетических показателей, увеличению момента и снижению пульсаций скорости. 1/2 m) (K 1, 2,), в большие пазы между полюсами уложена m-фазная обмотка двигателя, а в пазы между элементарными зубцами соседних 2mq (q 1, 2, P) полюсов уложены катушки m-фазного датчика по одной на каждой половине полюса, катушки, расположенные на одном полюсе, соединены последовательно и согласно конец с концом и образуют катушечную группу, катушечные группы, расположенные на полюсах с порядковыми номерами, различающимися на 2m, считая по часовой стрелке вдоль расточки статора, соединены последовательно конец с началом и образуют ветви, ветви с катушечными группами, расположенными на полюсах с порядковыми номерами, различающимися на m, соединены последовательно конец с концом, и в точках соединения выполнены выводы m-фазного выхода датчика, а начала m ветвей, являющиеся началами катушечных групп, расположенных на полюсах с четными и нечетными номерами, соединены вместе, и в точках соединения выполнены выводы однофазного входа датчика, отличающийся тем, что статор двигателя выполнен из двух пакетов различной длины, а обмотка датчика расположена на пакете меньшей длины. www.freepatent.ru
Изобретение относится к области электротехники и может быть использовано в электроприводах механизмов с переменной производительностью, например в вентиляторах, насосах, компрессорах, в высокоскоростных электрошпинделях и в бытовой технике. Предлагаемый высокоскоростной вентильно-ндукторный двухфазный нереверсивный двигатель, содержащий явнополюсный статор с четырьмя полюсами и сосредоточенными обмотками и ротор с двумя полюсами и клювообразными выступами на полюсах. При этом, согласно изобретению, ротор выполнен с двумя полюсами и с клювообразными выступами на полюсах, причем поверхность каждого полюса ротора с клювообразными выступами имеет форму трех цилиндрических поверхностей одинакового диаметра, при этом центр цилиндрической поверхности полюсов ротора совпадает с осью ротора, а центры двух цилиндрических поверхностей клювообразных выступов полюсов ротора не совпадают с осью ротора. Технический результат - увеличение коэффициента полезного действия и упрощение алгоритма управления высокоскоростного вентильно-ндукторного двухфазного нереверсивного двигателя. 3 ил.
Изобретение относится к электротехнике и может быть использовано в электроприводах механизмов с переменной производительностью, например в вентиляторах, насосах, компрессорах, в высокоскоростных электрошпинделях и в бытовой технике.
Известен индукторный нереверсивный двигатель, содержащий явнополюсный статор, имеющий четыре полюса, и ротор в виде двух цилиндрических поверхностей, имеющих несовпадение осей, при этом поперечное сечение обеих поверхностей имеет высшую точку относительно центра ротора, каждая поверхность ограничена с краев выступом так, что нижние точки одного выступа и верхние точки другого выступа принадлежат одной поверхности, аналогично - для другой поверхности. Протяженность дуг обеих поверхностей составляет 180° [Патент США №3679953, МКИ Н02К 29/00. - Опубл. 25.07.1972 г.].
Основным недостатком этого двигателя является большой воздушный зазор между полюсами статора и ротора, имеющий высокое магнитное сопротивление, и как следствие этого - малый вращающий момент.
Известен нереверсивный двухфазный электродвигатель с переменным магнитным сопротивлением, содержащий явнополюсный статор с четырьмя полюсами, на которых размещены четыре сосредоточенные обмотки, и ротор с двумя полюсами, причем поверхность каждого из полюсов ротора выполнена в виде двух цилиндрических поверхностей разных диаметров, центры которых совпадают с осью ротора. [Патент РФ №2089034, МКИ Н02К 29/10. - Опубл. 27.08.97. Бюл. №24].
Основным недостатком этого технического решения является высокий уровень шумов и вибраций, которые возникают за счет скачкообразного изменения подомоторных сил в процессе вращения ротора. [Шабаев В.А. Анализ источников шума вентильно-индукторного двигателя // Электротехника, 2005, №5].
Из известных технических решений наиболее близким к предлагаемому изобретению является двухтактный шаговый двигатель с искусственным расширением устойчивой зоны [Дискретный электропривод с шаговыми двигателями, под общ. ред. М.Г.Чиликина. М.: Энергия, 1971, с.94-103].
Двигатель содержит явнополюсный статор с четырьмя полюсами и сосредоточенными обмотками и явнополюсный ротор с двумя клювообразными полюсами, направленными в сторону вращения.
Недостатком этого двигателя является то, что ток фазы имеет резко несинусоидальный характер [Кузнецов В.А., Кузмичев В.А. Вентильно-индукторные двигатели. - М.: Издательство МЭИ, 2003, с.16], то есть содержит наряду с первой гармонической составляющей много высших гармоник большой амплитуды, это увеличивает омические потери в «меди» и в «стали» и уменьшает коэффициент полезного действия, кроме того, для устранения тормозных моментов в этих двигателях приходится применять сложный алгоритм управления, предполагающий упреждение угла включения и выключения транзисторов управляющего инвертора в зависимости от скорости вращения и момента нагрузки.
Целью предлагаемого изобретения является увеличение коэффициента полезного действия и упрощение алгоритма управления.
Поставленные цели достигаются тем, что в известном двухтактном шаговом двигателе с искусственным расширением устойчивой зоны, содержащем явнополюсный статор с четырьмя полюсами и сосредоточенными обмотками и ротор с двумя полюсами, имеющими клювообразные выступы, поверхность каждого полюса с клювообразными выступами имеет форму трех цилиндрических поверхностей одинакового диаметра, при этом центры цилиндрической поверхности полюсов ротора совпадают с осью ротора, а центры двух цилиндрических поверхностей клювообразных выступов полюсов ротора не совпадают с осью ротора. В результате чего момент двигателя, в зависимости от положения ротора, при постоянном токе в обмотке одной фазы в начале магнитного зацепления при угле поворота ротора 0<θ<45° линейно увеличивается, затем при угле поворота ротора 45°<θ<90° остается постоянным, а при угле поворота ротора 90°<θ<135° линейно уменьшается до нуля. При этом если подавать на обмотку фазы напряжение при угловом положении ротора, когда 0<θ<90°, а при положении ротора, когда 90°<θ<135°, замыкать электродвижущую силу самоиндукции на источник постоянного напряжения, равного напряжению, подаваемому в предыдущем случае, то под действием этих напряжений и электродвижущей силы самоиндукции ток в фазе меняется в соответствии с законом i=Isinθ+0,134sin3θ, где i - текущее значение тока, I - амплитуда первой гармоники тока, 0,134 - коэффициент, определяющий отношение амплитуды первой и третьей гармоник тока, при котором при угле 45°<θ<90° i=0,866I и постоянно. Таким образом, ток при разложении в ряд Фурье имеет минимальное число гармоник, что увеличивает коэффициент полезного действия за счет уменьшения потерь в «меди» и в «стали».
При угле поворота ротора 0<θ<90° напряжение, подаваемое на фазу  где L - текущее значение индуктивности фазы, r - омическое сопротивление обмотки, U - напряжение, подаваемое на обмотку, t - время. При этом
где L - текущее значение индуктивности фазы, r - омическое сопротивление обмотки, U - напряжение, подаваемое на обмотку, t - время. При этом  где М - текущее значение момента, развиваемое фазой, а
где М - текущее значение момента, развиваемое фазой, а  где Ω - частота вращения ротора, поэтому
где Ω - частота вращения ротора, поэтому  При угле поворота ротора 90°<θ<135° электродвижущая сила замыкается на источник постоянного тока, и напряжение на обмотке меняет знак,
При угле поворота ротора 90°<θ<135° электродвижущая сила замыкается на источник постоянного тока, и напряжение на обмотке меняет знак,  Поэтому для регулирования скорости и момента при неизменном гармоническом составе тока достаточно регулирования напряжения без сдвигов фронтов импульсов напряжения.
Поэтому для регулирования скорости и момента при неизменном гармоническом составе тока достаточно регулирования напряжения без сдвигов фронтов импульсов напряжения.
По сравнению с наиболее близким аналогичным техническим решением предлагаемое устройство имеет следующие новые признаки: поверхность ротора с клювообразными выступами на полюсах имеет форму трех цилиндрических поверхностей одинакового диаметра, при этом центр цилиндрической поверхности полюса ротора совпадает с осью ротора, а центры двух цилиндрических поверхностей клювообразных выступов полюсов ротора не совпадают с осью ротора.
Следовательно, заявляемое техническое решение соответствует требованию «новизна».
При реализации предлагаемого изобретения увеличивается коэффициент полезного действия за счет уменьшения омических потерь в «меди», и упрощается алгоритм управления.
Следовательно, заявляемое техническое решение соответствует требованию «положительный эффект».
По каждому отличительному признаку проведен поиск известных технических решений в области электротехники, автоматики и электропривода.
Высокоскоростных вентильно-индукторных двухфазных нереверсивных двигателей, имеющих четыре полюса на статоре с сосредоточенными обмотками и два полюса с клювообразными выступами на роторе, в которых поверхность каждого полюса с клювообразными выступами имеет форму трех цилиндрических поверхностей одинакового диаметра, и центр цилиндрической поверхности полюсов ротора совпадает с осью ротора, а центры двух цилиндрических поверхностей клювообразных выступов полюсов ротора не совпадают с осью ротора, не обнаружено.
Таким образом, указанные признаки обеспечивают заявляемому техническому решению соответствие требованию «существенные отличия».
Сущность предлагаемого изобретения поясняется чертежами.
На фиг.1. показан высокоскоростной вентильно-индукторный двухфазный нереверсивный двигатель, где обозначено: 1 - статор; 2 - ротор; 3 - обмотка; 4 - ось ротора; 5, 6 - центры цилиндрических поверхностей клювообразных выступов полюсов ротора.
На фиг.2. показаны токи фаз и гармонические составляющие токов фаз двигателя: iA - ток и гармонические составляющие фазы А; iB - ток и гармонические составляющие фазы В.
На фиг.3. показаны диаграммы работы высокоскоростного вентильно-индукторного двухфазного нереверсивного двигателя, где обозначено: L - индуктивность фаз; LA - индуктивность фазы A; LB - индуктивность фазы В;  - производная индуктивности фазы А по углу поворота ротора;
- производная индуктивности фазы А по углу поворота ротора;  - производная индуктивности фазы В по углу поворота ротора; UA - напряжение фазы A; UB - напряжение фазы В; i - токи фаз; iA - ток фазы А; iB - ток фазы В; МА - момент, развиваемый фазой А; MB - момент, развиваемый фазой В.
- производная индуктивности фазы В по углу поворота ротора; UA - напряжение фазы A; UB - напряжение фазы В; i - токи фаз; iA - ток фазы А; iB - ток фазы В; МА - момент, развиваемый фазой А; MB - момент, развиваемый фазой В.
С целью подтверждения положительного эффекта, достигаемого при использовании предлагаемого технического решения, в ОАО «НИПТИЭМ» были проведены экспериментальные исследования высокоскоростного вентильно-индукторного двухфазного нереверсивного двигателя с конфигурацией активной части, изображенной на фиг.1. Исследования подтвердили увеличение коэффициента полезного действия и упрощение алгоритма управления.
Таким образом, использование в известном двухтактном шаговом двигателе с искусственным расширением устойчивой зоны, имеющем четыре полюса на статоре с сосредоточенными обмотками и два полюса с клювообразными выступами на роторе, ротор, в котором поверхность каждого полюса с клювообразными выступами имеет форму трех цилиндрических поверхностей одинакового диаметра, и центр цилиндрической поверхности полюсов ротора совпадает с осью ротора, а центры двух цилиндрических поверхностей клювообразных выступов полюсов ротора не совпадают с осью ротора, позволяет улучшить его техническую характеристику.
Высокоскоростной вентильно-ндукторный двухфазный нереверсивный двигатель, содержащий явнополюсный статор с четырьмя полюсами и сосредоточенными обмотками и ротор с двумя полюсами и клювообразными выступами на полюсах, отличающийся тем, что, с целью увеличения коэффициента полезного действия и упрощения алгоритма управления, используется ротор с двумя полюсами и с клювообразными выступами на полюсах, причем поверхность каждого полюса ротора с клювообразными выступами имеет форму трех цилиндрических поверхностей одинакового диаметра, при этом центр цилиндрической поверхности полюсов ротора совпадает с осью ротора, а центры двух цилиндрических поверхностей клювообразных выступов полюсов ротора не совпадают с осью ротора.
www.findpatent.ru
Техническое решение относится к электротехнике, в частности к электрическим машинам, генераторам, двигателям, используемым в различных объектах.
Известен вентильный индукторный двигатель с самоподмагничиванием (описание к патенту США №7923888 на изобретение, МПК: 8 H02K 1/06), содержащий статор и ротор, установленные друг относительно друга с зазором, с возможностью совершения относительного вращательного движения, поверхности статора и ротора, обращенные друг к другу, снабжены равномерно расположенными зубцами, с формированием между соседними зубцами пазов, содержащий также фазные катушки, установленные в пазах статора, зубцы ротора по все длине в перпендикулярном к радиальному направлении выполнены криволинейной формы, с возможностью в части передних краев по ходу вращения ротора плавного уменьшения величины зазора между зубцом ротора и статора и достижением его постоянной величины за счет смены радиуса кривизны, характеризующейся наименьшим радиусом на переднем краю, по мере удаления от переднего края - большим его значением.
Двигатель выполнен с возможностью вращения ротора в одном направлении, с асимметричным ротором, в качестве криволинейной формы в отношении зубцов ротора использована эллиптическая форма.
К недостаткам приведенного технического решения относится отсутствие возможности увеличения рабочего момента на единицу массы вентильного индукторного двигателя.
Причины, препятствующие достижению нижеуказанного технического результата, заключаются в следующем.
Во-первых, использование неоптимальной геометрической конфигурации в конструкции, в частности статора.
Во-вторых, двигатель, как правило, реализован с фазными катушками с характерной традиционной намоткой проводом.
В качестве ближайшего аналога взят вентильный индукторный двигатель с самоподмагничиванием (описание к патенту США №6028385 на изобретение, МПК: 7 H02K 1/24, 7 H02K 19/06), содержащий статор и ротор, установленные друг относительно друга с зазором, с возможностью совершения относительного вращательного движения, поверхности статора и ротора, обращенные друг к другу, снабжены равномерно расположенными зубцами (полюсами), с формированием между соседними зубцами (полюсами) пазов, зубцы статора выполнены одной и той же геометрической конфигурации, содержащий также фазные катушки, установленные в пазах статора, с фазами А, В, С, при этом полюс статора первой фазы (фаза А) расположен между катушкой второй фазы (фаза В), установленной на соответствующий ей полюс статора, и катушкой третьей фазы (фаза С), установленной на соответствующий ей полюс статора, ротор снабжен парами относительно широких зубцов (полюсов), расположенных диаметрально противоположно друг относительно друга, и относительно узких зубцов (полюсов), также расположенных диаметрально противоположно друг относительно друга, каждый из указанных относительно широких зубцов (полюсов) выполнен с широкой торцевой гранью (широким поперечником), каждый из указанных относительно узких зубцов (полюсов) выполнен с узкой торцевой гранью (узким поперечником), указанные зубцы (полюса) ротора выполнены такой геометрической конфигурации, при которой указанная узкая торцевая грань по размеру примерно равна торцевой грани зубца (полюса) статора, а указанная широкая торцевая грань по размеру в отношении ее ширины выполнена с шириной, заданной в диапазоне: от значения ширины зубца (полюса) статора до значения суммы ширины зубца (полюса) статора и ширины двух примыкающих к нему пазов.
В приведенном двигателе катушки каждой фазы установлены на "n" зубцах (полюсах) статора, а ротор выполнен с тем же самым "n" зубцов (полюсов), причем количество относительно широких зубцов (полюсов) равно  "n", и количество относительно узких зубцов (полюсов) равно "n". В частности, катушки каждой фазы установлены на четырех зубцах (полюсах) статора, ротор выполнен с четырьмя зубцами (полюсами), с количеством относительно широких зубцов (полюсов), равным двум, и количеством относительно узких зубцов (полюсов), равным также двум.
"n", и количество относительно узких зубцов (полюсов) равно "n". В частности, катушки каждой фазы установлены на четырех зубцах (полюсах) статора, ротор выполнен с четырьмя зубцами (полюсами), с количеством относительно широких зубцов (полюсов), равным двум, и количеством относительно узких зубцов (полюсов), равным также двум.
Двигатель в частных случаях может быть реализован трехфазным либо четырехфазным.
В отношении расположения статора и ротора друг относительно друга может быть использована конструкция с внешним статором или обращенная конструкция.
Недостатками двигателя, взятого за ближайший аналог, является отсутствие возможности увеличения рабочего момента на единицу массы вентильного индукторного двигателя.
Причинами, препятствующими достижению нижеуказанного технического результата, является следующее.
Во-первых, использование неоптимальной геометрической конфигурации в конструкции, в частности, статора.
Во-вторых, двигатель реализован с катушками, намотанными, как правило, традиционным способом с использованием провода.
Техническим результатом является увеличение рабочего момента на единицу массы вентильного индукторного двигателя.
Дополнительным преимуществом предлагаемого двигателя может быть снижение пульсаций при генерации синусоидальных сигналов тока.
Технический результат достигается в вентильном индукторном двигателе с самоподмагничиванием, содержащем статор и ротор, установленные друг относительно друга с зазором, с возможностью совершения относительного вращательного движения, при этом поверхность статора, обращенная к ротору, снабжена зубцами, с формированием между соседними зубцами пазов, содержащем также фазные катушки, образующие фазы и установленные в пазах статора, причем в статоре отношение ширины зубца статора к ширине зубцового деления взято от 0,33 до 0,37, включая указанные значения, а фазные катушки намотаны из ленты фольги меди или алюминия.
В двигателе зубцы статора расположены равномерно.
В двигателе зубцы статора выполнены одной и той же геометрической конфигурацией.
В двигателе геометрия фазной катушки согласована с геометрией паза с возможностью максимального заполнения пространства паза устанавливаемыми в него катушками.
В двигателе поверхность ротора, обращенная к поверхности статора, снабжена зубцами.
В двигателе зубцы ротора расположены равномерно.
В двигателе зубцы ротора выполнены одной и той же геометрической конфигурации.
В двигателе фазные катушки, образующие фазы, соединены «звездой», с возможностью реализации двигателя n-фазным с n, равным трем или более.
В двигателе реализация двигателя n-фазным с n, равным трем или более, выполнена с возможностью включения в работу одновременно, по крайней мере, двух фаз.
В двигателе возможность включения в работу одновременно, по крайней мере, двух фаз, реализована с использованием для управления количества ключей, равного количеству фаз, с подключением каждой фазы к одному ключу.
В двигателе фазные катушки намотаны из ленты фольги меди или алюминия, ширина которой постоянна по длине.
В двигателе фазные катушки намотаны из ленты фольги меди или алюминия шириной около 20 мм, толщиной около 200 мкм в количестве от 55 до 65 витков, включая указанные значения, с использованием изолирующей прокладки между витками, создающей электрическую изоляцию их друг от друга.
В двигателе изолирующая прокладка выполнена из полиимида, толщина прокладки - около 12 мкм.
В двигателе в роторе каждый из зубцов выполнен одной и той же геометрической конфигурации с выдерживанием соотношения ширины торцевой грани зубца ротора к ширине торцевой грани зубца статора в интервале значений от 1,1 до 1,3, включая указанные значения, при этом взята ширина тех частей зубцов ротора и статора, между которыми зазор, с которым ротор и статор установлены друг относительно друга, минимален.
В двигателе реализация двигателя n-фазным с n, равным трем или более, выполнена с использованием статора с количеством зубцов, кратным числу фаз и ротора, в котором количество зубцов равно количеству зубцов статора за вычетом частного чисел, среди которых делимое равно количеству зубцов статора, а делитель - числу фаз.
В двигателе: реализация двигателя n-фазным с n, равным трем, выполнена с использованием статора с количеством зубцов, кратным числу фаз, а именно, с восемнадцатью зубцами или пятнадцатью зубцами, соответственно, с ротором с количеством зубцов, равным количеству зубцов статора за вычетом частного чисел, среди которых делимое равно количеству зубцов статора, а делитель - числу фаз, а именно, с пятнадцатью зубцами или десятью зубцами; реализация двигателя n-фазным с n, равным пяти, выполнена с использованием статора с количеством зубцов, кратным числу фаз, а именно, с пятнадцатью зубцами, с ротором с количеством зубцов, равным количеству зубцов статора за вычетом частного чисел, среди которых делимое равно количеству зубцов статора, а делитель - числу фаз, а именно, с двенадцатью зубцами; реализация двигателя n-фазным с n, равным шести, выполнена с использованием статора с количеством, зубцов кратным числу фаз, а именно, с восемнадцатью зубцами, с ротором с количеством зубцов, равным количеству зубцов статора за вычетом частного чисел, среди которых делимое равно количеству зубцов статора, а делитель - числу фаз, а именно, с пятнадцатью зубцами.
В двигателе фазные катушки, образующие фазу, в фазе соединены последовательно.
В двигателе статор выполнен с наружным диаметром около 300 мм и внутренним диаметром около 246 мм, наружным диаметром ротора около 245 мм и внутренним диаметром около 200 мм, длина указанных элементов конструкции - около 70 мм.
В двигателе статор по отношению к ротору выполнен внешним.
Сущность технического решения поясняется нижеследующим описанием и прилагаемыми чертежами.
На Фиг. 1 представлена конструкция двигателя с заданной массой около 15 кг и внешним диаметром около 300 мм, иллюстрирующая выполнение статора и ротора в наиболее оптимальном варианте относительно снижения пульсаций момента, соответственно, с 18 и 15 зубцами, с фазными катушками, выполненными из ленты фольги меди или алюминия, расположенными в пазах статора, где: 1 - статор, 2 - ротор, 3 - катушка.
На Фиг. 2 показана фазная катушка, выполненная из ленты фольги меди или алюминия, где: 4 - лента фольги; 5 - изолирующая прокладка.
На Фиг. 3 приведена электрическая схема шестифазного вентильного индукторного двигателя с 18 зубцами (полюсами) статора и 15 зубцами (полюсами) ротора, управляемого шестифазным током синусоидальной формы с постоянной составляющей, показан используемый в предлагаемом вентильном индукторном двигателе с самоподмагничиванием способ соединения последовательно включенных фазных катушек, образующих фазу, в «звезду», с использованием для управления каждой фазой по одному ключу, при котором в соседних фазах, образующих пары, одна подключается к верхнему (VT1, VT3, VT5) или нижнему (VT2, VT4, VT6) ключу, показано последовательное соединение: для фазы А1 катушек L1, L7, L13; для фазы В2 катушек L2, L8, L14; для фазы С3 катушек L3, L9, L15; для фазы А4 катушек L4, L10, L16; для фазы В5 катушек L5, L11, L17; для фазы С6 катушек L6, L12, L18.
Достижение технического результата базируется на следующем.
В предлагаемом вентильном индукторном двигателе с самоподмагничиванием фазные катушки намотаны из ленты фольги меди или алюминия.
Намотка из ленты фольги, а не традиционно проводом, обеспечивает коэффициент заполнения при установке в пазах статора 1 катушек 3 (см. Фиг. 1), равным 90% и более. В то время как коэффициент заполнения при традиционной намотке катушек из провода и установке их в пазах - менее 80%. Выполнение катушки 3 из ленты фольги 4 (см. Фиг. 2) обеспечивает при установке катушек 3 в пазах статора 1 реализацию максимального заполнения пространства паза с обеспечением существенного повышения коэффициента заполнения по сравнению с использованием катушки, намотанной проводом. При намотке катушки проводом возможно максимальное заполнение пространства паза, однако реализация возможности повышения коэффициента заполнения не достигается. Традиционно для намотки катушек применяют провода из меди с высокопрочной изоляцией круглого или прямоугольного сечения. Наличие изоляции обеспечивает электрическую прочность катушки, но уменьшает коэффициент заполнения. Коэффициент заполнения показывает, какую часть пространства паза занимает чистая медь проводов катушки, без изоляции. При максимальном заполнении пространства паза катушкой, намотанной проводом, не удается достигнуть повышения коэффициента заполнения. Значительная часть пространства паза оказывается заполнена изоляцией провода. Намотка катушек 3 лентой фольги уменьшает часть пространства, заполненного изоляцией, и, таким образом, приводит к повышению коэффициента заполнения.
Повышение коэффициента заполнения, обусловленное использованием фазных катушек 3, выполненных из ленты фольги 4, приводит, в свою очередь, к повышению КПД и, как следствие, к повышению рабочего момента.
Причем в отношении материала ленты фольги, используемой для изготовления фазных катушек, возможна альтернатива: медь или алюминий. Достижение указанного технического результата возможно как в первом случае, так и во втором случае, однако во втором случае при одних и тех же параметрах двигателя, в частности КПД, технический результат - увеличение рабочего момента на единицу массы вентильного индукторного двигателя выражается в максимальной степени.
Следует отметить, как в случае использования фазных катушек из ленты фольги алюминия, так и из меди, возможно достижение максимального момента в 300 Нм, в частности, для двигателя мотора-колеса. При этом в случае использования ленты фольги меди для выполнения фазных катушек потери составят на 36% меньше потерь в таком же двигателе, но с использованием для фазных катушек ленты фольги алюминия, масса двигателя с катушками из ленты фольги меди составит 15,8 кг, а момент на единицу массы около 300/15,8=19 Нм/кг. В таком же двигателе, при условии наличия тех же самых потерь, но с выполненными фазными катушками из ленты фольги алюминия, и соответственно, массой 12 кг, с использованием сниженной величины электрического тока для достижения тех же самых потерь, обеспечивающей падение рабочего момента до 240 Нм, момент на единицу массы составляет 240/12=20 Нм/кг. Таким образом, при одном и том же КПД для двигателя с фазными катушками из ленты фольги алюминия достигаемый рабочий момент на единицу массы оказывается большим, чем в двигателе с фазными катушками из ленты фольги меди.
В предлагаемом двигателе оптимизирована конструкция статора 1 в целях увеличения рабочего момента, как следствие рабочего момента на единицу массы (см. Фиг. 1).
В статоре 1 отношение ширины зубца статора к ширине зубцового деления взято от 0,33 до 0,37, включая указанные значения. Указанное соотношение обеспечивает допустимые в целях достижения технического результата величины потерь (~R×I2) в катушках в зависимости от ширины зубца. Для достижения, в частности, рабочего момента 300 Нм отношение ширины зубца статора к ширине зубцового деления необходимо взять равным 0,35, ему соответствует минимум потерь.
Вышеуказанное дополнительное преимущество по сравнению с вышеприведенными аналогами, которое может достигаться в предлагаемом двигателе, обеспечивается следующим.
В предлагаемом двигателе фазные катушки 3, установленные в пазах статора 1, формирующие фазы, соединены «звездой», с возможностью реализации двигателя n-фазным с n, равным трем или более, с возможностью включения в работу одновременно, по крайней мере, двух фаз (в частности, как показано на Фиг. 3).
Выполнение двигателя многофазным обеспечивает снижение пульсаций момента при генерации синусоидальных сигналов тока. Проявление указанного преимущества в максимальном выражении включает достижение для каждой фазы колебания момента не более 5% при генерации синусоидального тока с постоянной составляющей. Возможность использования как можно большего числа фаз снижает пульсации момента.
Как правило, в конструкции двигателя выполнена система магнитоизолированных фаз. Магнитный поток от каждой фазы замыкается по собственному пути, и если не учитывать насыщение, то взаимная индуктивность между фазами отсутствует. Каждая фаза обычно управляется двумя ключами. Включение в работу каждой фазы происходит поочередно. Для такой схемы характерна простота управления благодаря независимости фаз. Однако следует отметить при этом ее недостатки: повышенные пульсации момента, длинный путь для замыкания магнитного потока, использование большого числа ключей - на каждую фазу приходится два ключа.
В предлагаемом двигателе фазные катушки, образующие фазу, соединены в «звезду», с возможностью включения в работу одновременно, по крайней мере, двух фаз (см. Фиг. 3). В работе одновременно находятся не менее двух фаз, магнитные потоки, формируемые протекающими по обмотке фазными токами, замыкаются через соседние зубцы статора по кратчайшему пути, что существенно снижает падение магнитного напряжения в ярме.
В целях достижения дополнительного преимущества в дополнение к указанной оптимизации конструкции статора 1 потребуется оптимизировать конструкцию ротора 2. В этом случае будет обеспечиваться наряду с увеличением рабочего момента, и, как следствие, увеличением рабочего момента на единицу массы, также снижение пульсаций момента. В роторе 2 зубцы, в отличие, в частности, от указанного ближайшего аналога, распределенные равномерно, выполнены одной и той же геометрической конфигурации, размер поперечника зубца один и тот же для всех зубцов ротора (см. Фиг. 1). Ширина зубца ротора 2 несколько больше ширины зубца статора 1. По ширине зубец ротора 2 перекрывает зубец статора 1. Соотношение ширины торцевой грани зубца ротора 2 к ширине зубца торцевой грани статора 1 может быть выбрано в интервале значений от 1,1 до 1,3, включая указанные значения. При этом в расчет принимается ширина тех частей зубцов ротора 2 и статора 1, между которыми зазор, с которым ротор 2 и статор 1 установлены друг относительно друга, минимален, то есть верхушек зубцов статора 1 и ротора 2 (см. Фиг. 1).
Геометрия поперечного сечения ротора и статора так же, как и в приведенных аналогах, неизменна в зависимости от положения вдоль продольной оси секущей плоскости.
Предлагаемый вентильный индукторный двигатель с самоподмагничиванием выполнен управляемым током синусоидальной формы, но с постоянной составляющей.
Таким образом, изложение причинно-следственной связи совокупности существенных признаков и указанного технического результата допускает выполнение предлагаемого двигателя следующим образом.
В общем случае выполнения вентильный индукторный двигатель с самоподмагничиванием (см. Фиг. 1) содержит статор 1 ротор 2, установленные друг относительно друга с зазором, с возможностью совершения относительного вращательного движения. Поверхность статора 1, обращенная к ротору 2 снабжена зубцами. Между соседними зубцами статора 1 сформированы пазы. Двигатель содержит также фазные катушки 3, образующие фазы и установленные в пазах статора 1. При этом в статоре 1 отношение ширины зубца статора к ширине зубцового деления взято от 0,33 до 0,37, включая указанные значения. Фазные катушки 3 намотаны из ленты фольги 4 меди или алюминия (см. Фиг. 2).
В частных случаях реализации вентильный индукторный двигатель с самоподмагничиванием выполняется со следующими особенностями.
В двигателе (см. Фиг. 1) зубцы статора 1 расположены равномерно, зубцы статора 1 выполнены одной и той же геометрической конфигурации.
Геометрия фазной катушки 3 согласована с геометрией паза с возможностью максимального заполнения пространства паза устанавливаемыми в него катушками 3 (см. Фиг. 1). Форма, размеры паза и геометрические параметры фазных катушек 3 (см. Фиг. 2), выполняемых из ленты фольги 4, согласованы друг с другом с учетом достижения максимального заполнения пространства паза.
В частности, фазные катушки 3 намотаны из ленты фольги 4 меди или алюминия, ширина которой постоянна по длине катушки. Ширина ленты фольги 4 согласована с размерами паза статора 1, его шириной. Она близка к величине, равной примерно половине ширины паза статора 1 (см. Фиг. 1). При установке катушек 3 на соседние зубцы они максимально заполняют пространство паза, сформированного между указанными зубцами. Фазные катушки 3 могут быть намотаны из ленты фольги меди или алюминия шириной около 20 мм, толщиной около 200 мкм в количестве от 55 до 65 витков, включая указанные значения. Между витками ленты фольги 4 выполнена тонкая изолирующая прокладка 5, предназначенная для электрической изоляции витков катушки друг от друга. Толщина изолирующей прокладки 5 - около 12 мкм, выполнена прокладка из полиимида.
Приведенные параметры согласованы с параметрами выполнения статора 1. В частности, статор 1 выполнен с зубцами, характеризующимися прямоугольной формой в поперечнике, с пазами, дно которых выполнено в виде двух наклоненных плоскостей, пересекающихся друг с другом по центру паза, имеющих угол с боковыми стенками зубцов статора 1, равный прямому углу. При установке фазных катушек 3 в пазы статора 1 каждая из катушек 3 плотно примыкает вдоль зубца статора 1 к его боковой стороне и наклонной части дна, имеющей угол с указанной боковой стороной 90°. Сторонами, противоположными сторонам, примыкающим к боковым стенкам паза (боковые стенки зубца), две катушки при установке их на соседние зубцы статора 1, с расположением частей этих соседних катушек 3 в один паз, в пространстве указанного паза наклонены друг к другу, соприкасаясь, формируя незаполненное пространство в центральной части паза четырехугольной формы в поперечнике, у которого одна пара смежных сторон образована сторонами катушек 3, а вторая пара смежных сторон - сходящимися к центру паза плоскостями дна (см. Фиг. 1). Конкретные количественные параметры, касающиеся фазных катушек 3, в отношении геометрии и количества витков, могут отличаться от указанных. Количество витков определяется максимальным током, пропускаемым по катушкам двигателя, соответствующим значению не более 150 А - 160 А. Для двигателя возможно использование и больших значений токов, соответственно, использование другого количества витков, однако в этом случае возрастет стоимость электронных компонентов двигателя.
При использовании фазных катушек из ленты фольги 4 алюминия с указанной изолирующей прокладкой 5 из полиимида вес фазной обмотки статора уменьшается. Заполняемость катушки увеличивается, достигая 90%. Поддержка рабочих температур за счет пленки полиимида до 250°С позволяет кратковременно наращивать рабочий момент двигателя без его разрушения. Использование фазных катушек из ленты фольги алюминия позволяет уменьшить вес двигателя по сравнению со случаем использования фазных катушек из ленты фольги меди на 24%, с 15,8 кг до 12 кг.
Поверхность ротора 2, обращенная к поверхности статора 1, снабжена зубцами. Зубцы ротора 2 расположены равномерно, выполнены одной и той же геометрической конфигурации (см. Фиг. 1). Размер поперечника зубца один и тот же для всех зубцов ротора 2. В частных случаях реализации двигателя, соотношение ширины торцевой грани зубца ротора 2 к ширине торцевой грани зубца статора 1 выбирают в интервале значений от 1,1 до 1,3, включая указанные значения. При этом во внимание принимается ширина в тех частях зубцов ротора 2 и статора 1, между которыми зазор, с которым ротор 2 и статор 1 установлены друг относительно друга (см. Фиг. 1), минимален. Приведенная реализация геометрии зубцов ротора и статора обеспечивает дополнительное снижение пульсаций момента на величину от 3% до 4%, включая указанные значения интервала.
Фазные катушки 3, образующие фазы, соединены «звездой» (см. Фиг. 3), с возможностью реализации двигателя n-фазным с n, равным трем или более. Реализация двигателя n-фазным с n, равным трем или более, выполнена с возможностью включения в работу одновременно, по крайней мере, двух фаз. Возможность включения в работу одновременно, по крайней мере, двух фаз, реализована с использованием для управления количества ключей, равного количеству фаз, с подключением каждой фазы к одному ключу (см. Фиг. 3).
Так, для шестифазного двигателя для управления фазами использовано 6 ключей VT1, VT2, VT3, VT4, VT5, VT6. Две соседние фазы подключены к двум ключам, образующим пару для этих фаз (см. Фиг. 3), верхний ключ и нижний ключ. В приведенном (см. Фиг. 3) шестифазном двигателе 3 пары фаз: А1 и В2; С3 и А4; В5 и С6. Указанные фазы в каждой паре - соседние. Фазные катушки L1, L7, L13, образующие фазу А1, подключены к верхнему ключу VT1. Фазные катушки L2, L8, L14, образующие фазу В2, подключены к нижнему ключу VT2. Фазные катушки L3, L9, L15, образующие фазу С3, подключены к верхнему ключу VT3. Фазные катушки L4, L10, L16, образующие фазу А4, подключены к нижнему ключу VT4. Фазные катушки L5, L11, L17, образующие фазу В5, подключены к верхнему ключу VT5. Фазные катушки L6, L12, L18, образующие фазу С6, подключены к верхнему ключу VT6. В работу включаются одновременно, по крайней мере, две соседние фазы, то есть попарно.
При реализации двигателя n-фазным с n, равным трем или более, с соблюдением соотношений ширины зубца статора к ширине зубцового деления от 0,33 до 0,37, включая указанные значения, используют статор 1 с количеством зубцов кратным числу фаз, а ротор 2 - c количеством зубцов, равным количеству зубцов статора за вычетом частного чисел, среди которых делимое равно количеству зубцов статора, а делитель - числу фаз (см. Фиг. 1). На упомянутой фигуре приведена конструкция двигателя со статором 1 и ротором 2, соответственно, с 18 и 15 зубцами, при использовании которой достижение технического результата в сочетании со снижением пульсаций момента проявляется в максимальной степени для параметров: масса двигателя около 15 кг, внешний диаметр около 300 мм.
Реализация двигателя n-фазным с n, равным трем, может быть выполнена с использованием статора 1 с количеством зубцов, кратным числу фаз, а именно, с восемнадцатью зубцами или пятнадцатью зубцами. Соответственно, при этом ротор 2 должен быть выполнен с количеством зубцов, равным количеству зубцов статора за вычетом частного чисел, среди которых делимое равно количеству зубцов статора, а делитель - числу фаз, а именно, с пятнадцатью зубцами или десятью зубцами.
Реализация двигателя n-фазным с n, равным пяти, может быть осуществлена с использованием статора 1 с количеством зубцов, кратным числу фаз, а именно, с пятнадцатью зубцами. При этом ротор 2 берут выполненным с количеством зубцов, равным количеству зубцов статора за вычетом частного чисел, среди которых делимое равно количеству зубцов статора, а делитель - числу фаз, а именно, с двенадцатью зубцами.
Реализация двигателя n-фазным с n, равным шести, может быть выполнена с использованием статора 1 с количеством зубцов, кратным числу фаз, а именно, с восемнадцатью зубцами. Соответственно ротор 2 характеризуется наличием количества зубцов, равного количеству зубцов статора за вычетом частного чисел, среди которых делимое равно количеству зубцов статора, а делитель - числу фаз, а именно, пятнадцатью зубцами.
Как правило, на практике аналогичные двигатели выполняют с количеством фаз от 3 до 6. В каждой фазе выполнены по 3 фазные катушки. Для уменьшения пульсаций момента в максимальной степени, снижения потерь «в железе» предпочтительна шестифазная схема подключения фазных катушек, образующих фазу, «звездой».
В предлагаемом двигателе фазные катушки, образующие фазу, в фазе соединены последовательно (см. Фиг. 3). Для шестифазного двигателя со статором с 18 зубцами и ротором с 15 зубцами в фазе соединены последовательно три фазные катушки. Для пятифазного двигателя со статором с 15 зубцами и ротором с 12 зубцами в фазе соединены последовательно три фазные катушки. Для трехфазного двигателя со статором с 18 зубцами и ротором с 15 зубцами в фазе соединены последовательно шесть фазных катушек. Для трехфазного двигателя со статором с 15 зубцами и ротором с 10 зубцами в фазе соединены последовательно пять фазных катушек.
Отметим, что фазные катушки могут быть соединены параллельно. В частности, указанное соединение используется при намотке катушек из ленты фольги меди с целью снижения добавочных потерь в меди. При этом проводник обмотки по высоте разбивают на три части, а число последовательных витков фазы и напряжение не изменяются.
Статор 1 может быть выполнен с наружным диаметром около 300 мм и внутренним диаметром около 246 мм. При этом наружный диаметр ротора 2 составляет около 245 мм, а его внутренний диаметр - около 200 мм. Длина указанных элементов конструкции - около 70 мм.
В двигателе может быть использована конструкция с внешним статором или обращенная конструкция. Обращенная конструкция - конструкция с внешним ротором чаще всего применяется в моторе-колесе. Конструкция с внешним статором 1 (см. Фиг. 1) предпочтительна в виду лучшей теплоотдачи.
На базе предлагаемого вентильного индукторного двигателя с самоподмагничиванием можно создать электрическую машину для мотора-колеса автомобиля, обеспечивающую следующие показатели:
|
Перегрев обмотки при разгоне автомобиля до 100 км/час за 12 секунд составит 36°С. КПД в зоне рабочих моментов (80 Нм) на скорости 100 км/час ожидается в пределах 92-93%.
Предлагаемый двигатель, выполненный управляемым, в частности, шестифазным током синусоидальной формы с постоянной составляющей, работает следующим образом.
Собранную конструкцию, содержащую статор 1, ротор 2 и установленные в пазах статора фазные катушки 3 (см. Фиг. 1), последовательно соединенные с образованием фазы (см. Фиг. 3), устанавливают на валу. Каждую фазу подключают к управляющему ключу, выполненному на базе биполярного транзистора с изолированным затвором. Для шестифазного двигателя для управления фазами используют 6 ключей: VT1, VT2, VT3, VT4, VT5, VT6. При помощи указанных ключей фазы двигателя коммутируются напряжением. Каждый из указанных ключей соединен через индивидуальный драйвер с контроллером. Управление работой двигателя осуществляет контроллер. Контроллер связан с датчиком положения ротора и блоком управления скоростью. В зависимости от сигнала датчика положения ротора и от заданной скорости вращения с помощью ключей VT1-VT6, происходит коммутация тока в необходимые обмотки, обеспечивая вращение ротора с заданной скоростью. Приведение во вращение базируется на магнитном притяжении зубцов ротора к возбужденным, в данный момент переменным током, зубцам статора.
Достигаемый рабочий момент благодаря выполнению фазных катушек намоткой ленты фольги при эксплуатации двигателя составляет 300 Нм и более.
В случае использования двигателя с фазными катушками из ленты фольги алюминия для мотора колеса автомобиля достигаемый рабочий момент, составляющий 300 Нм и более, при радиусе колеса 300 мм и весе экипажа 1500 кг обеспечивает разгон автомобиля до скорости 100 км/час за 11-12 сек, при условии использования полного привода (все колеса являются ведущими). Разгон до 100 км/час (885 об/мин) осуществляется с постоянством момента, далее до 1800 об/мин (200 км/час) с постоянной мощностью 28 кВт. Масса активных материалов (магнитопровод с обмоткой) не превышает 15 кг, неподрессоренная масса не превышает допустимые пределы. КПД в зоне постоянства мощности - более 90%.
Питание фаз обмотки статора 1 осуществляется синусоидальным током с постоянной составляющей, причем постоянная составляющая тока фазы по величине равна амплитуде синусоидальной составляющей тока IфDC=IфAC=Iф.
Посредством контроллера в зависимости от сигнала датчика положения ротора и заданной блоком управления скоростью скорости вращения через драйверы A1-С6 осуществляется подача модулированного сигнала напряжения на фазы A1-С6. Форма подаваемого модулированного сигнала напряжения на фазы A1-С6 приводит к возникновению в фазных катушках тока синусоидальной формы с постоянной составляющей, необходимого для снижения вибраций, шума и пульсаций момента. В отношении последних, они не превышают 15% в результате выполнения двигателя, управляемого синусоидальной формой тока с постоянной составляющей, многофазным.
Аналогичным образом работает двигатель, выполненный управляемым, в частности, пятифазным током синусоидальной формы с постоянной составляющей.
Таким же образом собранную конструкцию, содержащую статор, ротор и установленные в пазах статора фазные катушки, последовательно соединенные с образованием фазы, устанавливают на валу. Каждую фазу подключают к управляющему ключу, выполненному на базе биполярного транзистора с изолированным затвором. Для пятифазного двигателя при управлении фазами используют 5 ключей: VT1, VT2, VT3, VT4, VT5. При помощи указанных ключей фазы двигателя коммутируются напряжением. Каждый из указанных ключей соединен через индивидуальный драйвер с контроллером. Управление работой двигателя осуществляет контроллер. Контроллер связан с датчиком положения ротора и блоком управления скоростью. В зависимости от сигнала датчика положения ротора и от заданной скорости вращения с помощью ключей VT1-VT5, происходит коммутация тока в необходимые обмотки, обеспечивая вращение ротора с заданной скоростью. Принцип действия двигателя основан на магнитном притяжении зубцов ротора к возбужденным, в данный момент переменным током, зубцам статора.
Посредством контроллера в зависимости от сигнала датчика положения ротора и заданной блоком управления скоростью скорости вращения через драйверы осуществляется подача модулированного сигнала напряжения на фазы. Форма подаваемого модулированного сигнала напряжения на фазы приводит к возникновению в фазных катушках тока синусоидальной формы с постоянной составляющей, необходимого для снижения вибраций, шума и пульсаций момента.
Для трехфазного двигателя, выполненного управляемым, в частности, трехфазным током синусоидальной формы с постоянной составляющей, работа осуществляется таким же образом.
Конструкцию, содержащую статор, ротор и установленные в пазах статора фазные катушки, последовательно соединенные с образованием фазы, устанавливают на валу. Каждую фазу подключают к управляющему ключу, выполненному на базе биполярного транзистора с изолированным затвором. Для трехфазного двигателя используют 3 ключа для управления фазами. Посредством ключей фазы двигателя коммутируются напряжением. Каждый из ключей фаз соединен через индивидуальный драйвер с контроллером, управляющим работой двигателя. Контроллер связан с датчиком положения ротора и блоком управления скоростью. В зависимости от сигнала датчика положения ротора и от заданной скорости вращения с помощью фазных ключей, происходит коммутация тока в необходимые обмотки, обеспечивая тем самым вращение ротора с заданной скоростью, поскольку принцип действия двигателя основан на магнитном притяжении зубцов ротора к возбужденным, в данный момент переменным током, зубцам статора.
Посредством контроллера в зависимости от сигнала датчика положения ротора и заданной блоком управления скоростью скорости вращения через драйверы осуществляется подача модулированного сигнала напряжения на фазы. Форма подаваемого модулированного сигнала напряжения на фазы приводит к возникновению в фазных катушках тока синусоидальной формы с постоянной составляющей, необходимого для снижения вибраций, шума и пульсаций момента.
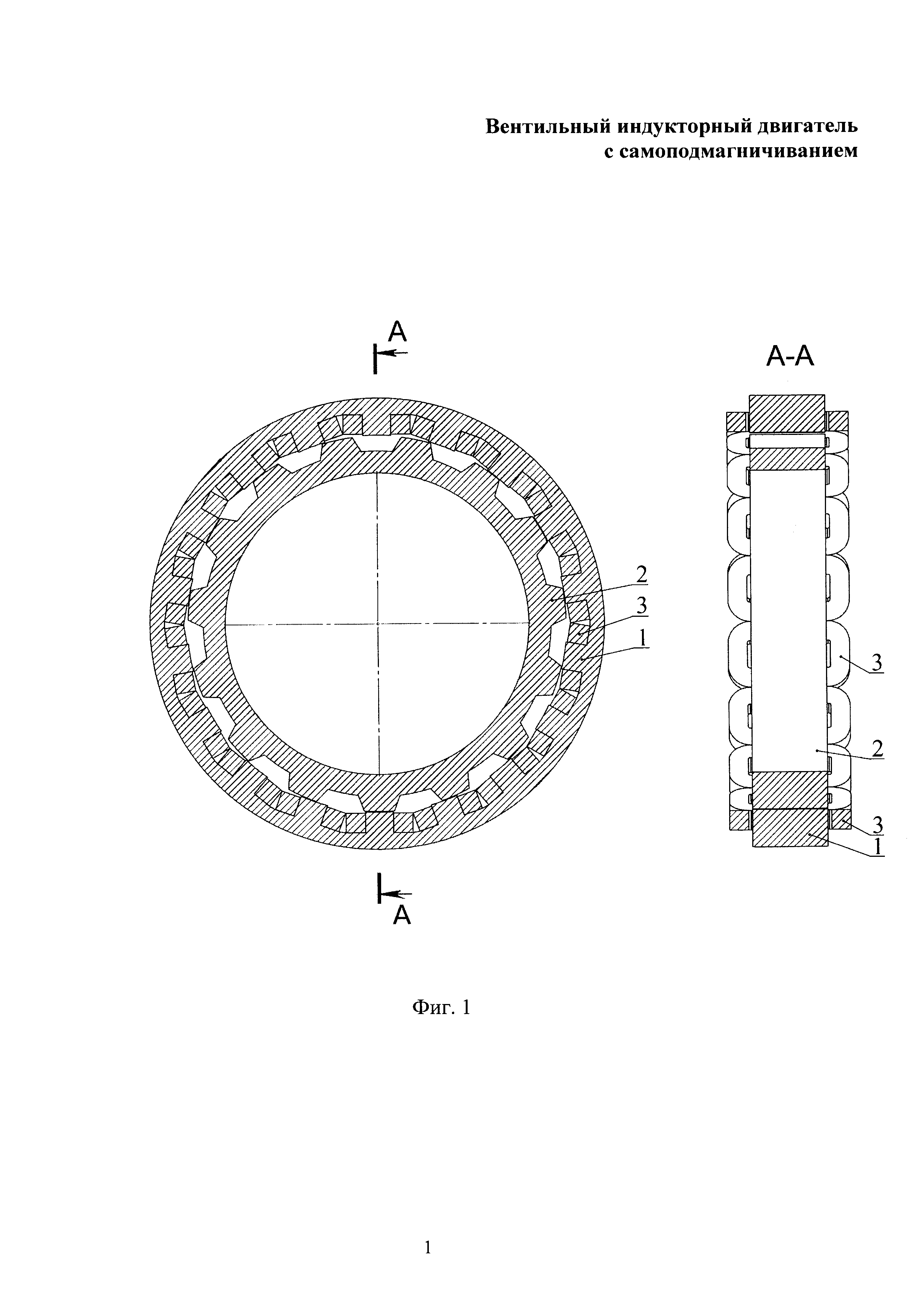
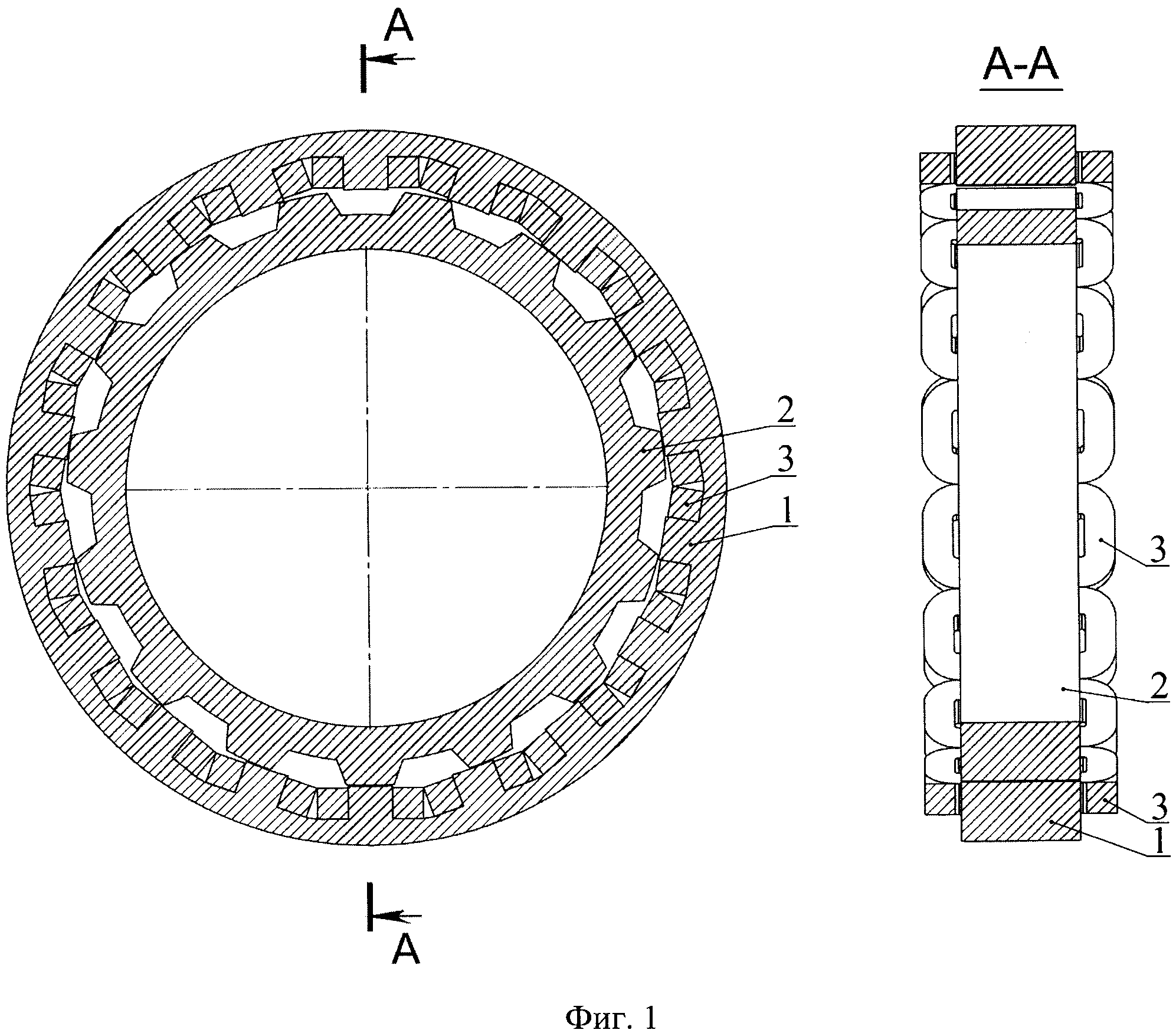
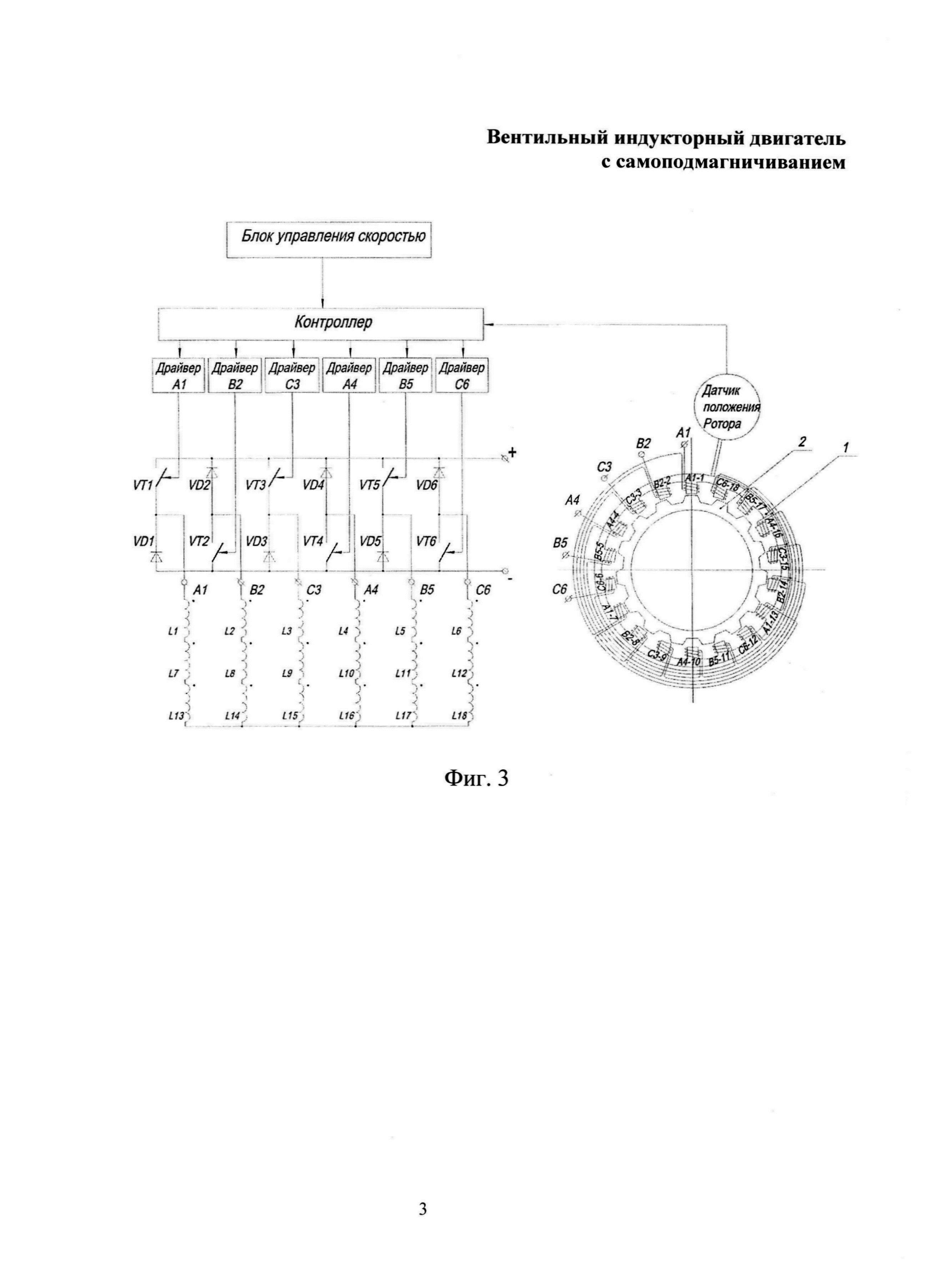
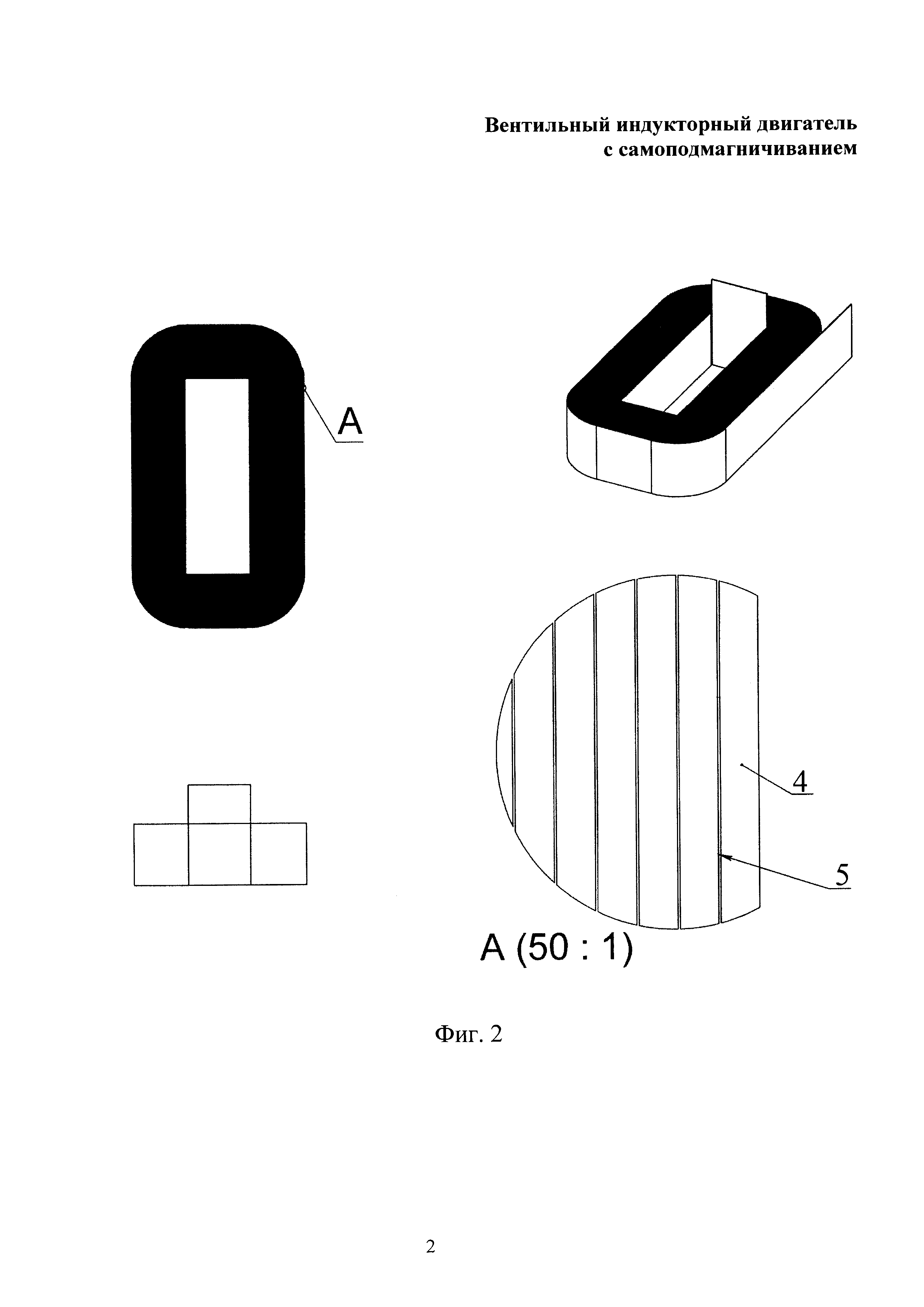
edrid.ru
Изобретение относится к электротехнике, к бесколлекторным электродвигателям с возбуждением от постоянных магнитов и может быть использовано, в частности, в нефтяной промышленности для добычи нефти в качестве погружного электродвигателя для привода центробежного или винтового погружных насосов. Технический результат заключается в повышении КПД и уменьшении массогабаритных показателей. Секция заявленного электродвигателя содержит корпус, в котором расположен статор и закрепленный на валу ротор. Ротор выполнен двухпакетным с двумя кольцевыми постоянными магнитами, которые разнонаправлено намагничены в радиальном направлении и расположены под его пакетами. Между пакетами ротора установлена немагнитная втулка, а вал выполнен из магнитного материала. Магниты одной секции многосекционного вентильного индукторного электродвигателя имеют разнонаправленное намагничивание, а прилегающие друг к другу магниты смежных секций имеют однонаправленное намагничивание. 2 н. и 4 з.п. ф-лы, 3 ил.
Область техники, к которой относится изобретение
Изобретение относится к области электротехники, а именно к бесконтактным электродвигателям с возбуждением от постоянных магнитов, и может быть использовано в любых областях техники, в частности, в качестве погружного электродвигателя, служащего приводом центробежного или винтового погружного насоса, используемого в нефтяной промышленности для добычи нефти.
Уровень техники
Известен погружной асинхронный электродвигатель, содержащий корпус, статор, набранный из активных пакетов, разделенных немагнитными пакетами, и короткозамкнутый ротор, также состоящий из нескольких пакетов (А.А.Богданов "Погружные центробежные электронасосы для добычи нефти", Москва, изд. "Недра", 1968, стр.131).
Недостатком данного двигателя является сложность регулирования частоты его вращения, поэтому он, как правило, используется для работы с погружным центробежным насосом с постоянной производительностью (частотой вращения) и не позволяет добиться оптимальной нефтедобычи в случае изменения дебита скважины.
Указанного недостатка не имеют вентильные электродвигатели с возбуждением от постоянных магнитов.
Известен вентильный электродвигатель, содержащий статор и ротор с постоянным магнитом, намагниченным в радиальном направлении (см. патент RU 2006143 C1, МПК7 Н 02 К 29/00, публ. 15.01.1994).
Недостатком данного двигателя является сложность его изготовления, обусловленная тем, что кольцевой постоянный магнит выполнен с чередующимися полюсами, а вал выполнен из немагнитного материала.
Известен индукторный электродвигатель, который содержит корпус, в котором расположен статор и ротор, закрепленный на валу и состоящий из двух пактов с возбуждением от кольцевого постоянного магнита, расположенного между пакетами ротора. Указанный двигатель по совокупности существенных признаков и достигаемому техническому результату может быть принят в качестве ближайшего аналога (см. Кенио Т. "Шаговые двигатели и их микропроцессорные системы управления", Москва, изд. "Энергоатомиздат", 1987, стр.34, рис 2.33, 2.34).
Недостатками данного электродвигателя являются необходимость для эффективной работы двигателя изготовления его вала из немагнитного материала, а также его большие осевые размеры, что затрудняет создание многосекционного двигателя. При использовании более технологичного вала из магнитного материала примерно четверть магнитного потока возбуждения ответвляется в вал, что приводит к существенному уменьшению индукции в рабочем воздушном зазоре и ухудшению энергетических и массогабаритных показателей электродвигателя.
Раскрытие изобретения
Задача, на решение которой направлено заявляемое изобретение, состоит в создании двигателя с меньшими массогабаритными показателями и повышенными энергетическими показателями.
Технический результат, достигаемый при решении поставленной задачи, заключается в повышении КПД, уменьшении длины и массы электродвигателя.
Указанный технический результат достигается за счет того, что секция вентильного индукторного электродвигателя содержит корпус, в котором расположен статор и закрепленный на валу ротор, состоящий из двух пакетов с возбуждением от кольцевого постоянного магнита, причем ротор выполнен с двумя кольцевыми постоянными магнитами, которые разнонаправлено намагничены в радиальном направлении и расположены под пакетами ротора, при этом между пакетами ротора установлена немагнитная втулка, а вал выполнен из магнитного материала.
Отличительной особенностью заявляемого изобретения является то, что ротор выполнен с двумя кольцевыми постоянными магнитами, которые разнонаправлено намагничены в радиальном направлении и расположены под пакетами ротора, при этом между пакетами ротора установлена немагнитная втулка, а вал выполнен из магнитного материала.
Выполнение вала из магнитного материала и расположение под пакетами ротора кольцевых постоянных магнитов, радиально намагниченных в разном направлении, позволяет создать замкнутый магнитный поток возбуждения, в котором величина магнитной индукции превышает величину магнитной индукции при аксиальном намагничивании магнитов за счет минимального потока рассеивания, что улучшает энергетические показатели электродвигателя.
Для многосекционного вентильного индукторного электродвигателя технический результат достигается за счет того, что многосекционный электродвигатель содержит корпус, в котором размещено несколько секций, каждая из которых имеет статор и закрепленный на валу ротор, состоящий из двух пакетов, между которыми установлена немагнитная втулка, причем ротор каждой секции выполнен с двумя кольцевыми постоянными магнитами, которые намагничены в радиальном направлении и расположены под пакетами ротора, при этом магниты одной секции имеют разнонаправленное намагничивание, а прилегающие друг к другу магниты смежных секций имеют однонаправленное намагничивание, а вал выполнен из магнитного материала.
Отличительной особенностью заявляемого изобретения является то, что многосекционный электродвигатель состоит из нескольких секций, каждая из которых имеет статор и закрепленный на валу ротор, состоящий из двух пакетов, между которыми установлена немагнитная втулка, причем ротор каждой секции выполнен с двумя кольцевыми постоянными магнитами, которые намагничены в радиальном направлении и расположены под пакетами ротора, при этом магниты одной секции имеют разнонаправленное намагничивание, а вал выполнен из магнитного материала, что как было указано выше улучшает энергетические показатели секции электродвигателя, а однонаправленное намагничивание прилегающих друг к другу магнитов смежных секций улучшает энергетические показатели многосекционного электродвигателя за счет того, что магнитный поток каждой секции проходит по свое магнитной цепи и не ответвляется в смежную секцию.
Кроме того, в частном случае реализации изобретения кольцевые постоянные магниты расположены на магнитомягкой втулке.
Кроме того, в частном случае реализации изобретения кольцевые постоянные магниты закрыты магнитомягкими бандажами.
При проведении поиска по патентным и научно-техническим источникам информации не было найдено решений, содержащих всей совокупности признаков независимых пунктов формулы изобретения, что позволяет сделать вывод о соответствии заявляемого решения критерию патентоспособности "новизна", также не было обнаружено всей совокупности признаков отличительной части независимых пунктов формулы изобретения, что позволяет сделать вывод о соответствии заявляемого технического решения критерию патентоспособности "изобретательский уровень".
Осуществление изобретения
Фиг.1 - продольный разрез секции вентильного индукторного электродвигателя.
Фиг.2 - поперечное сечение вентильного индукторного электродвигателя.
Фиг.3 - продольный разрез многосекционного вентильного индукторного электродвигателя.
Вентильный индукторный электродвигатель состоит из статора, который собирается из нескольких активных пакетов и немагнитных пакетов, и ротора, который также состоит из нескольких пакетов, размещенных на общем валу. Количество пакетов ротора и статора выбирается в зависимости от мощности двигателя.
Так на фиг.1 представлена конструкция одной секции вентильного индукторного электродвигателя, которая состоит из двух активных пакетов (4) статора, разделенных немагнитным пакетом (6), и двух пакетов (3) ротора, разделенных немагнитной втулкой (7). Пакеты (4) и (3) статора и ротора набраны из листовой электротехнической стали. Пакеты (4) статора запрессовывают в корпус (1), который является одновременно и частью магнитопровода. Пакеты (3) ротора выполнены с открытыми пазами (9), а пакеты (4) статора выполнены с закрытыми пазами (10). Пазы (9) заполнены немагнитным и неэлектропроводным материалом, а в пазы (10) уложена выполненная в протяжку обмотка (11) из специального обмоточного провода.
Пакеты (3) ротора закреплены на общем валу (2) из магнитного материала. Для погружного маслонаполненного электродвигателя вал выполняется с осевым отверстием для обеспечения циркуляции масла и улучшения охлаждения электродвигателя.
Под каждым активным пакетом (3) ротора располагают намагниченный в радиальном направлении кольцевой постоянный магнит (5), обеспечивающий возбуждение электродвигателя, причем намагничивание магнитов (5) выполнено разнонаправленным. Кольцевые постоянные магниты (5) устанавливают на магнитомягкой втулке (8), которая упрощает сборку ротора и обеспечивает прохождение магнитного потока в вал (2). Между кольцевыми магнитами (5) и пакетами (3) ротора установлены магнитомягкие бандажи (12), которые предотвращают повреждение магнитов (5) при закреплении на них пакетов (3).
На фиг.2 представлен многосекционный вентильный индукторный электродвигатель, который состоит из нескольких секций, представленных на фиг.1, причем секции устанавливаются на валу (2) таким образом, что прилегающие друг к другу кольцевые постоянные магниты (5) смежных секций имеют однонаправленное намагничивание.
Внутренняя полость двигателя выполняется герметичной и заполняется диэлектрическим маслом с целью защиты двигателя от проникновения в его полость пластовой жидкости, охлаждения обмоток и смазывания подшипников.
Работа вентильного индукторного электродвигателя осуществляется следующим образом.
Кольцевые разнонаправлено радиально намагниченные постоянные магниты (5), установленные под пакетами (3) ротора, создают магнитный поток, который проходит через пакет (4) статора, обмотку (11), корпус (1), магнитомягкую втулку (8) и вал (2) из магнитного материала, тем самым создается замкнутая магнитная цепь для прохождения магнитного потока, в которой рассеивание магнитного потока в воздушных зазорах не приводит к существенному уменьшению индукции магнитного поля.
При однонаправленном намагничивании прилегающих друг к другу магнитов (5) смежных секций многосекционного вентильного электродвигателя в этих секциях создаются магнитные потоки противоположного направления, что улучшает энергетические показатели многосекционного электродвигателя, поскольку магнитный поток в каждой секции проходит по магнитной цепи своей секции и не ответвляется в смежную секцию, что происходило бы, если прилегающие друг к другу постоянные магниты (5) смежных секций имели разнонаправленное намагничивание.
Применение радиально намагниченных постоянных магнитов (5) и расположение их под пакетами (3) ротора позволяет уменьшить расстояние между пакетами (3) ротора в каждой секции электродвигателя, которое определяется размерами немагнитной втулки (7), что обеспечивает уменьшение длины электродвигателя и тем самым уменьшение расхода активных материалов, например обмоточной меди, и постоянных магнитов, что, в свою очередь, приводит к уменьшению массы электродвигателя. Кроме того, более технологичное выполнение конструкции электродвигателя приведет к существенному снижению его себестоимости и эксплутационных расходов. Таким образом, предлагаемое техническое решение позволяет повысить КПД электродвигателя, а также значительно уменьшить его длину и массу, а также повысить технологичность изготовления и сборки электродвигателя за счет применения стандартного вала из магнитного материала. Заявляемое техническое решение соответствует критерию патентоспособности "промышленная применимость", поскольку его реализацию можно осуществить с использованием известных средств и методов.
1. Секция вентильного индукторного электродвигателя, содержащая корпус, в котором расположен статор и закрепленный на валу ротор, состоящий из двух пакетов с возбуждением от кольцевого постоянного магнита, отличающаяся тем, что ротор выполнен с двумя кольцевыми постоянными магнитами, которые разнонаправлено намагничены в радиальном направлении и расположены под пакетами ротора, при этом между пакетами ротора установлена немагнитная втулка, а вал выполнен из магнитного материала.
2. Секция вентильного индукторного электродвигателя по п.1, отличающаяся тем, что кольцевые постоянные магниты расположены на магнитомягкой втулке.
3. Секция вентильного индукторного электродвигателя по п.1, отличающаяся тем, что между кольцевыми постоянными магнитами и пакетами ротора размещены магнитомягкие бандажи.
4. Многосекционный вентильный индукторный электродвигатель, содержащий корпус, в котором размещено несколько секций, каждая из которых имеет статор и закрепленный на валу ротор, состоящий из двух секций с возбуждением от кольцевого постоянного магнита, отличающийся тем, что ротор каждой секции выполнен с двумя кольцевыми постоянными магнитами, которые намагничены в радиальном направлении и расположены под пакетами ротора, между пакетами ротора в каждой секции установлена немагнитная втулка, при этом магниты одной секции имеют разнонаправленное намагничивание, прилегающие друг к другу магниты смежных секций имеют однонаправленное намагничивание, а вал выполнен из магнитного материала.
5. Многосекционный вентильный индукторный электродвигатель по п.4, отличающийся тем, что кольцевые постоянные магниты расположены на магнитомягкой втулке.
6. Многосекционный вентильный индукторный электродвигатель по п.4, отличающийся тем, что между кольцевыми постоянными магнитами и пакетами ротора размещены магнитомягкие бандажи.
www.findpatent.ru