Содержание
принцип действия. Двигатель постоянного тока: устройство
Первой из всех изобретенных в 19 веке вращающихся электромашин является двигатель постоянного тока. Принцип действия его известен с середины прошлого столетия, и до настоящего времени двигатели постоянного тока (ДПТ) продолжают верно служить человеку, приводя в движение множество полезных машин и механизмов.
Первые ДПТ
Начиная с 30-х годов 19 века в своем развитии они прошли несколько этапов. Дело в том, что до появления в конце позапрошлого века машинных генераторов переменного тока единственным источником электроэнергии был гальванический элемент. Поэтому все первые электродвигатели могли работать только на постоянном токе.
Каким же был первый двигатель постоянного тока? Принцип действия и устройство двигателей, строившихся в первой половине 19 века, являлся следующим. Явнополюсный индуктор представлял собой набор неподвижных постоянных магнитов или стержневых электромагнитов, не имевших общего замкнутого магнитопровода. Явнополюсный якорь образовывали несколько отдельных стержневых электромагнитов на общей оси, приводимых во вращение силами отталкивания и притяжения к полюсам индуктора. Типичными их представителями являлись двигатели У. Риччи (1833) и Б. Якоби (1834), оснащенные механическими коммутаторами тока в электромагнитах якорях с подвижными контактами в цепи обмотки якоря.
Явнополюсный якорь образовывали несколько отдельных стержневых электромагнитов на общей оси, приводимых во вращение силами отталкивания и притяжения к полюсам индуктора. Типичными их представителями являлись двигатели У. Риччи (1833) и Б. Якоби (1834), оснащенные механическими коммутаторами тока в электромагнитах якорях с подвижными контактами в цепи обмотки якоря.
Как работал двигатель Якоби
Каков же был у этой машины принцип действия? Двигатель постоянного тока Якоби и его аналоги обладали пульсирующим электромагнитным моментом. В течение времени сближения разноименных полюсов якоря и индуктора под действием магнитной силы притяжения момент двигателя быстро достигал максимума. Затем, при расположении полюсов якоря напротив полюсов индуктора, механический коммутатор прерывал ток в электромагнитах якоря. Момент падал до нуля. За счет инерции якоря и приводимого в движение механизма полюсы якоря выходили из-под полюсов индуктора, в этот момент в них от коммутатора подавался ток противоположного направления, их полярность также менялась на противоположную, а сила притяжения к ближайшему полюсу индуктора сменялась на силу отталкивания. Таким образом, двигатель Якоби вращался последовательными толчками.
Таким образом, двигатель Якоби вращался последовательными толчками.
Появляется кольцевой якорь
В стержневых электромагнитах якоря двигателя Якоби ток периодически выключался, создаваемое ими магнитное поле исчезало, а его энергия преобразовывалась в тепловые потери в обмотках. Таким образом, электромеханическое преобразование электроэнергии источника тока якоря (гальванического элемента) в механическую происходило в нем с перерывами. Нужен был двигатель с непрерывной замкнутой обмоткой, ток в которой протекал бы постоянно в течение всего времени его работы.
И такой fuhtufn был создан в 1860 году А. Пачинотти. Чем же отличался от предшественников его двигатель постоянного тока? Принцип действия и устройство двигателя Пачинотти следующие. В качестве якоря он использовал стальное кольцо со спицами, закрепленное на вертикальном валу. При этом якорь не имел явно выраженных полюсов. Он стал неявнополюсным.
Между спицами кольца были намотаны катушки обмотки якоря, концы которых соединялись последовательно на самом якоре, а от точек соединения каждых двух катушек были сделаны отпайки, присоединенные к пластинам коллектора, расположенным вдоль окружности внизу вала двигателя, число которых равнялось числу катушек. Вся обмотка якоря была замкнута сама на себя, а последовательные точки соединения ее катушек присоединялись к соседним пластинам коллектора, по которым скользила пара токоподводящих роликов.
Вся обмотка якоря была замкнута сама на себя, а последовательные точки соединения ее катушек присоединялись к соседним пластинам коллектора, по которым скользила пара токоподводящих роликов.
Кольцевой якорь был помещен между полюсами двух неподвижных электромагнитов индуктора-статора, так что силовые линии создаваемого ими магнитного поля возбуждения входили в наружную цилиндрическую поверхность якоря двигателя под северным полюсом возбуждения, проходили по кольцевому якорю, не перемещаясь во внутреннее его отверстие, и выходили наружу под южным полюсом.
Как работал двигатель Пачинотти
Какой же у него был принцип действия? Двигатель постоянного тока Пачинотти работал точно так же, как и современные ДПТ.
В магнитном поле полюса индуктора с данной полярностью всегда находилось определенное число проводников обмотки якоря с током неизменного направления, причем направление тока якоря под разными полюсами индуктора было противоположным. Это достигалось размещением токоподводящих роликов, играющих роль щеток, в пространстве между полюсами индуктора. Поэтому мгновенный ток якоря втекал в обмотку через ролик, пластину коллектора и присоединенную к ней отпайку, которая также находилась в пространстве между полюсами, далее протекал в противоположных направлениях по двум полуобмоткам-ветвям, и наконец вытекал через отпайку, пластину коллектора и ролик в другом межполюсном промежутке. При этом сами катушки якоря под полюсами индуктора менялись, но направление тока в них оставалось неизменным.
Поэтому мгновенный ток якоря втекал в обмотку через ролик, пластину коллектора и присоединенную к ней отпайку, которая также находилась в пространстве между полюсами, далее протекал в противоположных направлениях по двум полуобмоткам-ветвям, и наконец вытекал через отпайку, пластину коллектора и ролик в другом межполюсном промежутке. При этом сами катушки якоря под полюсами индуктора менялись, но направление тока в них оставалось неизменным.
По закону Ампера, на каждый проводник катушки якоря с током, находящийся в магнитном поле полюса индуктора, действовала сила, направление которой определяется по известному правилу «левой руки». Относительно оси двигателя эта сила создавала вращающий момент, а сумма моментов от всех таких сил дает суммарный момент ДПТ, который уже при нескольких пластинах коллектора является почти постоянным.
ДПТ с кольцевым якорем и граммовской обмоткой
Как это часто случалось в истории науки и техники, изобретение А. Пачинотти не нашло применения. Оно было на 10 лет забыто, пока в 1870 году его независимо не повторил франко-немецкий изобретатель З. Грамм в аналогичной конструкции генератора постоянного тока. В этих машинах ось вращения уже была горизонтальной, использовались угольные щетки, скользящие по пластинам коллектора почти современной конструкции. К 70-м годам 19 века принцип обратимости электромашин стал уже хорошо известен, а машина Грамма использовалась как генератор и двигатель постоянного тока. Принцип действия его уже описан выше.
Оно было на 10 лет забыто, пока в 1870 году его независимо не повторил франко-немецкий изобретатель З. Грамм в аналогичной конструкции генератора постоянного тока. В этих машинах ось вращения уже была горизонтальной, использовались угольные щетки, скользящие по пластинам коллектора почти современной конструкции. К 70-м годам 19 века принцип обратимости электромашин стал уже хорошо известен, а машина Грамма использовалась как генератор и двигатель постоянного тока. Принцип действия его уже описан выше.
Несмотря на то, что изобретение кольцевого якоря было важным шагом в развитии ДПТ, его обмотка (названная граммовской) имела существенный недостаток. В магнитном поле полюсов индуктора находились только те ее проводники (называемые активными), которые лежали под этими полюсами на наружной цилиндрической поверхности якоря. Именно к ним были приложены магнитные силы Ампера, создающие вращающий момент относительно оси двигателя. Те же неактивные проводники, что проходили через отверстие кольцевого якоря, не участвовали в создании момента.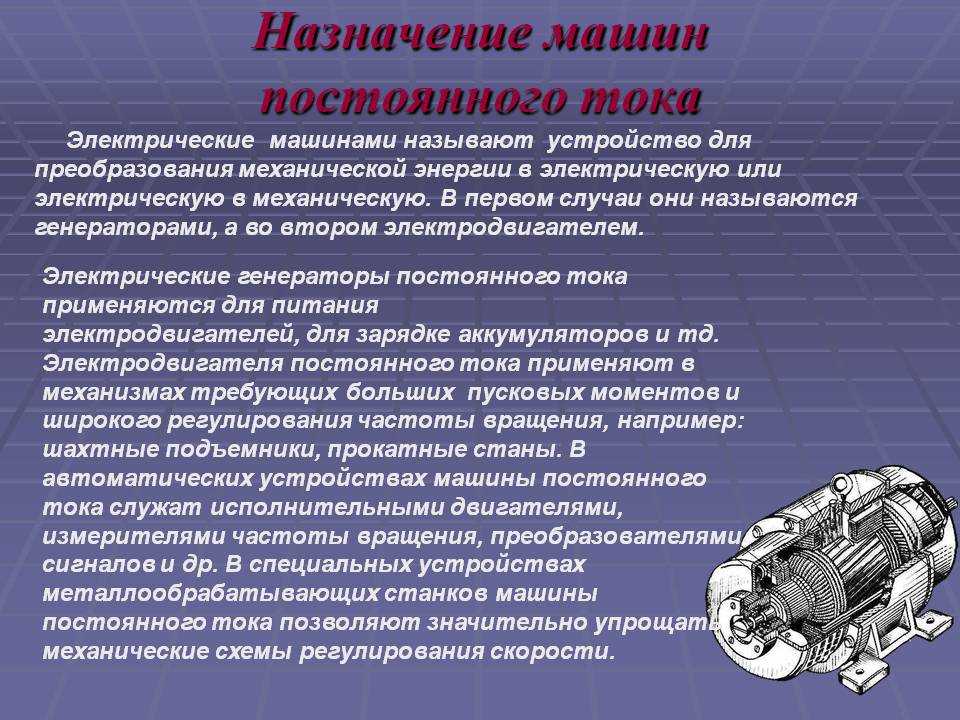 Они только бесполезно рассеивали электроэнергию в виде тепловых потерь.
Они только бесполезно рассеивали электроэнергию в виде тепловых потерь.
От кольцевого якоря к барабанному
Устранить этот недостаток кольцевого якоря удалось в 1873 году известному немецкому электротехнику Ф. Гефнер-Альтенеку. Как же функционировал его двигатель постоянного тока? Принцип действия, устройство его индуктора-статора такие же, как у двигателя с кольцевой обмоткой. А вот конструкция якоря и его обмотка изменились.
Гефнер-Альтенек обратил внимание, что направление тока якоря, вытекающего из неподвижных щеток, в проводниках граммовской обмотки под соседними полюсами возбуждения всегда противоположно, т.е. их можно включить в состав витков расположенной на наружной цилиндрической поверхности катушки с шириной (шагом), равным полюсному делению (части окружности якоря, приходящейся на один полюс возбуждения).
В этом случае становится ненужным отверстие в кольцевом якоря, и он превращается в сплошной цилиндр (барабан). Такая обмотка и сам якорь получили наименование барабанных. Расход меди в ней при одинаковом числе активных проводников гораздо меньше, чем в граммовской обмотке.
Расход меди в ней при одинаковом числе активных проводников гораздо меньше, чем в граммовской обмотке.
Якорь становится зубчатым
В машинах Грамма и Гефнер-Альтенека поверхность якоря была гладкой, а проводники его обмотки располагались в зазоре между ним и полюсами индуктора. При этом расстояние между вогнутой цилиндрической поверхностью полюса возбуждения и выпуклой поверхностью якоря достигало нескольких миллиметров. Поэтому для создания нужной величины магнитного поля требовалось применять катушки возбуждения с большой магнитодвижущей силой (с большим числом витков). Это существенно увеличивало габариты и вес двигателей. Кроме того, на гладкой поверхности якоря его катушки было трудно крепить. Но как же быть? Ведь для действия на проводник с током силы Ампера он должен находиться в точках пространства с большой величиной магнитного поля (с большой магнитной индукцией).
Оказалось, что это не является необходимым. Американский изобретатель пулемета Х. Максим показал, что если выполнить барабанный якорь зубчатым, а в образовавшиеся между зубцами пазы поместить катушки барабанной обмотки, то зазор между ним и полюсами возбуждения можно уменьшить до долей миллиметра. Это позволило существенно уменьшить размеры катушек возбуждения, но вращающий момент ДПТ нисколько не уменьшился.
Это позволило существенно уменьшить размеры катушек возбуждения, но вращающий момент ДПТ нисколько не уменьшился.
Как же функционирует такой двигатель постоянного тока? Принцип действия основан на том обстоятельстве, что при зубчатом якоре магнитная сила приложена не к проводникам в его пазах (магнитное поле в них практически отсутствует), а к самим зубцам. При этом наличие тока в проводнике в пазу имеет решающее значение для возникновения этой силы.
Как избавились от вихревых токов
Еще одно важнейшее усовершенствование внес знаменитый изобретатель Т. Эдиссон. Что же добавил он в двигатель постоянного тока? Принцип действия остался неизменным, а вот материал, из которого сделан его якорь, изменился. Вместо прежнего массивного он стал шихтованным из тонких электрически изолированных друг от друга стальных листов. Это позволило уменьшить величину вихревых токов (токов Фуко) в якоре, что увеличило КПД двигателя.
Принцип действия двигателя постоянного тока
Кратко его можно сформулировать так: при подключении обмотки якоря возбужденного двигателя к источнику питания в ней возникает большой ток, называемый пусковым и превышающий в несколько раз его номинальное значение. Причем под полюсами возбуждения противоположной полярности направление токов в проводниках обмотки якоря так же противоположно, как показано на рисунке ниже. Согласно правилу «левой руки», на эти проводники действуют силы Ампера, направленные против часовой стрелки и увлекающие якорь во вращение. При этом в проводниках обмотки якоря наводится электродвижущая сила (противо-ЭДС), направленная встречно напряжению источника питания. По мере разгона якоря растет и противо-ЭДС в его обмотке. Соответственно, ток якоря уменьшается от пускового до величины, соответствующей рабочей точке на характеристике двигателя.
Причем под полюсами возбуждения противоположной полярности направление токов в проводниках обмотки якоря так же противоположно, как показано на рисунке ниже. Согласно правилу «левой руки», на эти проводники действуют силы Ампера, направленные против часовой стрелки и увлекающие якорь во вращение. При этом в проводниках обмотки якоря наводится электродвижущая сила (противо-ЭДС), направленная встречно напряжению источника питания. По мере разгона якоря растет и противо-ЭДС в его обмотке. Соответственно, ток якоря уменьшается от пускового до величины, соответствующей рабочей точке на характеристике двигателя.
Чтобы повысить скорость вращения якоря, нужно либо увеличить ток в его обмотке, либо снизить противо-ЭДС в ней. Последнего можно добиться, уменьшив величину магнитного поля возбуждения путем снижения тока в обмотке возбуждения. Данный способ управления скоростью ДПТ получил широкое распространение.
Принцип действия двигателя постоянного тока с независимым возбуждением
С присоединением выводов обмотки возбуждения (ОВ) к отдельному источнику электропитания (независимая ОВ) обычно выполняются мощные ДПТ, чтобы было более удобно регулировать величину тока возбуждения (с целью изменения скорости вращения). По своим свойствам ДПТ с независимой ОВ практически аналогичны ДПТ с ОВ, параллельно подключаемой к обмотке якоря.
По своим свойствам ДПТ с независимой ОВ практически аналогичны ДПТ с ОВ, параллельно подключаемой к обмотке якоря.
Параллельное возбуждение ДПТ
Принцип действия двигателя постоянного тока параллельного возбуждения определяется его механической характеристикой, т.е. зависимостью скорости вращения от нагрузочного момента на его валу. Для такого двигателя изменение скорости при переходе от холостого вращения к номинальному моменту нагрузки составляет от 2 до 10%. Такие механические характеристики называются жесткими.
Таким образом, принцип действия двигателя постоянного тока с параллельным возбуждением обуславливает его применение в приводах с постоянной скоростью вращения при большом диапазоне изменения нагрузки. Однако он широко используется и в регулируемом электроприводе с переменной скоростью вращения. При этом для регулирования его скорости может применяться изменение как тока якоря, так и тока возбуждения.
Последовательное возбуждение ДПТ
Принцип действия двигателя постоянного тока последовательного возбуждения, как и параллельного, определяется его механической характеристикой, которая в этом случае является мягкой, т. к. частота вращения двигателя значительно варьируется при изменениях нагрузки. Где же выгоднее всего применять такой двигатель постоянного тока? Принцип действия жд тягового двигателя, скорость которого должна уменьшаться при преодолении составом подъемов и возвращаться к номинальной при движении по равнине, полностью соответствует характеристикам ДПТ с ОВ, последовательно соединенной с обмоткой якоря. Поэтому значительная часть электровозов во всем мире оснащена такими устройствами.
к. частота вращения двигателя значительно варьируется при изменениях нагрузки. Где же выгоднее всего применять такой двигатель постоянного тока? Принцип действия жд тягового двигателя, скорость которого должна уменьшаться при преодолении составом подъемов и возвращаться к номинальной при движении по равнине, полностью соответствует характеристикам ДПТ с ОВ, последовательно соединенной с обмоткой якоря. Поэтому значительная часть электровозов во всем мире оснащена такими устройствами.
Принцип действия двигателя постоянного тока с последовательным возбуждением реализуют также тяговые двигатели пульсирующего тока, которые представляют собой, по сути, те же ДПТ с последовательной ОВ, но специально сконструированные для работы с выпрямленным уже на борту электровоза током, имеющим значительные пульсации.
Коллекторный двигатель постоянного тока: конструкция и принцип действия
Коллекторные электродвигатели довольно распространены в быту и на производстве. Они используются для привода различных механизмов, электроинструмента, в автомобилях. Отчасти популярность обусловлена простой регулировкой оборотов ротора, но есть и некоторые ограничения их применения и конечно же недостатки. Давайте разберемся что такое коллекторный двигатель постоянного тока (КДПТ), какие бывают разновидности данного вида электродвигателей и где они используются.
Отчасти популярность обусловлена простой регулировкой оборотов ротора, но есть и некоторые ограничения их применения и конечно же недостатки. Давайте разберемся что такое коллекторный двигатель постоянного тока (КДПТ), какие бывают разновидности данного вида электродвигателей и где они используются.
- Определение и устройство
- Принцип действия
- Виды КДПТ и схемы соединения обмоток
- Схема подключения и реверс
- Сфера применения
- Достоинства и недостатки
Определение и устройство
В справочниках и энциклопедиях приводят, такое определение:
«Коллекторным называется электродвигатель, у которого датчиком положения вала и переключателем обмоток является одно и то же устройство – коллектор. Такие двигатели могут работать либо только на постоянном токе, либо и на постоянном, и на переменном.»
Коллекторный электродвигатель, как и любой другой, состоит из ротора и статора. В этом случае ротор – является якорем. Напомним, что якорем называется та часть электрической машины, которая потребляет основной ток, и в которой индуцируется электродвижущая сила.
Для чего нужен и как устроен коллектор? Коллектор расположен на валу (роторе), и представляет собой набор продольно расположенных пластин, изолированных от вала и друг от друга. Их называют ламелями. К ламелям подключаются отводы секций обмоток якоря (устройство якорной обмотки КДПТ вы видите на группе рисунков ниже), а точнее к каждой из них подключен конец предыдущей и начало следующей секции обмотки.
Ток к обмоткам подаётся через щетки. Щётки образуют скользящий контакт и во время вращения вала соприкасаются то с одной, то с другой ламелью. Таким образом происходит переключение обмоток якоря, для этого и нужен коллектор.
Щеточный узел состоит из кронштейна с щеткодержателями, непосредственно в них и устанавливаются графитовые или металлографитовые щетки. Для обеспечения хорошего контакта щетки прижимаются к коллектору пружинами.
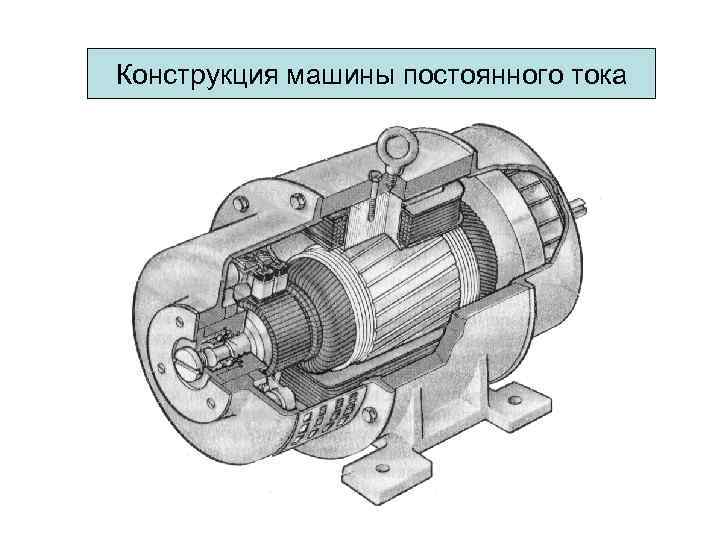
На статоре устанавливаются постоянные магниты или электромагниты (обмотка возбуждения), которые создают магнитное поле статора. В литературе по электрическим машинам вместо слова «статор» чаще используют термины «магнитная система» или «индуктор». На рисунке ниже изображена конструкция ДПТ в разных проекциях. Теперь же давайте разберемся как работает коллекторный двигатель постоянного тока!
В литературе по электрическим машинам вместо слова «статор» чаще используют термины «магнитная система» или «индуктор». На рисунке ниже изображена конструкция ДПТ в разных проекциях. Теперь же давайте разберемся как работает коллекторный двигатель постоянного тока!
Принцип действия
Когда ток протекает через обмотку якоря, возникает магнитное поле, направление которого можно определить с помощью правила буравчика. Постоянное магнитное поле статора взаимодействует с полем якоря, и он начинает вращаться благодаря тому, что одноименные полюса отталкиваются, притягиваясь к разноимённым. Что отлично иллюстрирует рисунок ниже.
При переходе щеток на другие ламели ток начинает протекать в обратную сторону (если рассматривать приведенный выше пример), магнитные полюса меняются местами и процесс повторяется.
В современных коллекторных машинах не используется двухполюсная конструкция из-за неравномерности вращения, в момент переключения направления тока силы, действующие на якорь, будут минимальны. А если включить двигатель, вал которого остановился в этом «переходном» положении — он может и не начать вращаться совсем. Поэтому на коллекторе современного двигателя постоянного тока расположено значительно больше полюсов и секций обмоток, уложенных в пазах шихтованного сердечника, таким образом достигаются оптимальные плавность движения и момент на валу.
А если включить двигатель, вал которого остановился в этом «переходном» положении — он может и не начать вращаться совсем. Поэтому на коллекторе современного двигателя постоянного тока расположено значительно больше полюсов и секций обмоток, уложенных в пазах шихтованного сердечника, таким образом достигаются оптимальные плавность движения и момент на валу.
Принцип работы коллекторного двигателя простым языком для чайников раскрыт в следующем видеоролике, убедительно рекомендуем ознакомиться.
Виды КДПТ и схемы соединения обмоток
По способу возбуждения коллекторные двигатели постоянного тока различают двух типов:
- С постоянными магнитами (маломощные двигатели мощностью десятки и сотни Ватт).
- С электромагнитами (мощные машины, например, на грузоподъёмных механизмах и станках).
Различают такие типы КДПТ по способу соединения обмоток:
- Последовательного возбуждения (в старой отечественной литературе и от старых электриков можно услышать название «Сериесные», от англ.
 Serial). Здесь обмотка возбуждения подключена последовательно с обмоткой якоря. Высокий пусковой момент – преимущество такой схемы, а её недостаток – падение частоты вращения с увеличением нагрузки на валу (мягкая механическая характеристика), и то что двигатель идёт вразнос (неконтролируемый рост оборотов с последующим повреждением опорных подшипников и якоря) если работают на холостом ходу или с нагрузкой на валу в меньше 20-30% от номинальной.
Serial). Здесь обмотка возбуждения подключена последовательно с обмоткой якоря. Высокий пусковой момент – преимущество такой схемы, а её недостаток – падение частоты вращения с увеличением нагрузки на валу (мягкая механическая характеристика), и то что двигатель идёт вразнос (неконтролируемый рост оборотов с последующим повреждением опорных подшипников и якоря) если работают на холостом ходу или с нагрузкой на валу в меньше 20-30% от номинальной. - Параллельного (также называют «шунтовые»). Соответственно обмотка возбуждения подключена параллельно обмотке якоря. На низких оборотах на валу высокий момент и стабилен в относительно широком диапазоне оборотов, а с увеличением оборотов он уменьшается. Преимущество — стабильные обороты в широком диапазоне нагрузки на валу (ограничивается его мощностью), а недостаток – при обрыве в цепи возбуждения может пойти вразнос.
- Назависимого. Обмотки возбуждения и якоря питаются от разных источников. Такое решение позволяет точнее регулировать обороты вала. Особенности работы похожи на ДПТ с параллельным возбуждением.
- Смешанного. Часть обмотки возбуждения подключена параллельно, а часть последовательно с якорем. Совмещают достоинства последовательного и параллельного типов.
 Serial). Здесь обмотка возбуждения подключена последовательно с обмоткой якоря. Высокий пусковой момент – преимущество такой схемы, а её недостаток – падение частоты вращения с увеличением нагрузки на валу (мягкая механическая характеристика), и то что двигатель идёт вразнос (неконтролируемый рост оборотов с последующим повреждением опорных подшипников и якоря) если работают на холостом ходу или с нагрузкой на валу в меньше 20-30% от номинальной.
Serial). Здесь обмотка возбуждения подключена последовательно с обмоткой якоря. Высокий пусковой момент – преимущество такой схемы, а её недостаток – падение частоты вращения с увеличением нагрузки на валу (мягкая механическая характеристика), и то что двигатель идёт вразнос (неконтролируемый рост оборотов с последующим повреждением опорных подшипников и якоря) если работают на холостом ходу или с нагрузкой на валу в меньше 20-30% от номинальной. Особенности работы похожи на ДПТ с параллельным возбуждением.
Особенности работы похожи на ДПТ с параллельным возбуждением.Условное графическое обозначение на схеме вы видите ниже.
В иностранной и современной отечественной литературе, а также на схемах можно встретить и другое представление УГО для КДПТ, как было приведено на предыдущем рисунке в виде круга с двумя квадратами, где круг обозначает якорь, а два квадрата – щетки.
Схема подключения и реверс
Схема соединения обмоток статора и ротора определяется при изготовлении, и, в зависимости от того, где применяется конкретный двигатель, нужно выбирать соответствующее решение. В определенных режимах работы (тормозной режим, например) схемы включения обмоток могут изменяться или вводиться дополнительные элементы.
Включают маломощные коллекторные двигатели постоянного тока с помощью: полупроводниковых ключей (транзисторов), тумблеров или кнопок, специализированных микросхем-драйверов или с помощью маломощных реле. Крупные мощные машины подключаются к сети постоянного тока через двухполюсные контакторы.
Крупные мощные машины подключаются к сети постоянного тока через двухполюсные контакторы.
Ниже вы видите реверсивную схему подключения двигателя постоянного тока к сети 220В. На практике, на производстве схема будет аналогичной, но диодного моста в ней не будет, поскольку все линии для подключения таких двигателей прокладываются от тяговых подстанций, где переменный ток выпрямляется.
Реверс осуществляется путем смены полярности на обмотке возбуждения или на якоре. Изменить полярность и там, и там нельзя, поскольку направление вращения вала не изменится, как это происходит с универсальными коллекторными двигателями при работе на переменном токе.
Для плавного пуска двигателя в цепь питания обмотки якоря или обмотки якоря и обмотки возбуждения (в зависимости от схемы их соединения) вводят регулировочное устройство, например, реостат, таким же образом регулируют и частоту вращения вала, но вместо реостата чаще используют набор постоянных резисторов, подключаемых с помощью набора контакторов.
В современных приложениях частота оборотов изменяется с помощью широтно-импульсной модуляции (ШИМ) и полупроводникового ключа, именно так это и сделано в аккумуляторном электроинструменте (шуруповёрт, например). КПД такого способа значительно выше.
Сфера применения
Коллекторные двигатели постоянного тока применяются повсеместно как в быту, так и в промышленных устройствах и механизмах, давайте кратко рассмотрим их область применения:
- В автомобилях используют 12В и 24В коллекторные ДПТ для привода щеток стеклоочистителей (дворников), в стеклоподъёмниках, для запуска двигателя (стартер — это коллекторный двигатель постоянного тока последовательного или смешанного возбуждения) и приводах другого назначения.
- В грузоподъёмных механизмах (краны, лифты и пр.) используются КДПТ, которые работают от сети постоянного тока с напряжением 220В или любым другим доступным напряжением.
- В детских игрушках и радиоуправляемых моделях малой мощности используются КДПТ с трёхполюсным ротором и постоянными магнитами на статоре.
- В ручном аккумуляторном электроинструменте — разнообразные дрели, болгарки, электроотвертки и т.д.

Отметим, что в современный дорогой электроинструмент устанавливают не коллекторные, а бесколлекторные электродвигатели.
Достоинства и недостатки
Разберем плюсы и минусы коллекторного двигателя постоянного тока. Преимущества:
- Соотношение размеров к мощности (массогабаритные показатели).
- Простота регулировки оборотов и реализации плавного пуска.
- Пусковой момент.
Недостатки у КДПТ следующие:
- Износ щеток. Высоконагруженные двигатели, которые регулярно эксплуатируются, требуют регулярного осмотра, замены щеток и обслуживания коллекторного узла.
- Коллектор изнашивается из-за трения щеток.
- Возможно искрение щеток, что ограничивает применение в опасных местах (тогда используют КДПТ взрывозащищенного исполнения).
- Из-за постоянного переключения обмоток этот тип двигателей постоянного тока вносит помехи и искажения в питающие цепи или электросеть, что приводит к сбоям и проблемам в работе других элементов схемы (особенно актуально для электронных схем).
- У ДПТ на постоянных магнитах магнитные силы со временем ослабевают (размагничиваются) и эффективность двигателя снижается.

Вот мы и рассмотрели, что такое коллекторный двигатель постоянного тока, как он устроен и какой у него принцип действия. Если остались вопросы, задавайте их в комментариях под статьей!
Материалы по теме:
- Что такое анод и катод
- Как работает магнитный пускатель
- Как понизить напряжение в сети
- Что такое асинхронный двигатель
Двигатели постоянного тока
Урок 45. Технология 8 класс ФГОС
На этом уроке мы с вами поговорим о двигателе постоянного тока. Выясним, каково устройство и принцип действия коллекторного электродвигателя. Рассмотрим два случая подключения обмотки возбуждения к источнику тока в роторе, который состоит из электромагнита. И познакомимся с устройством настоящего рабочего электродвигателя.
Конспект урока «Двигатели постоянного тока»
Прежде
всего давайте определимся какую функцию выполняют двигатели. Они превращают
Они превращают
электрическую энергию в механическую.
Первый
электрический двигатель был создан в 1834 году русским учёным Борисом
Семёновичем Якоби.
В
деятельности человека находят свое применение электродвигатели самых разных
конструкций. В производстве их используют для того, чтобы привести в движение
станки и механизмы, трамваи, троллейбусы, электровозы и многое другое.
Электродвигатели используются даже в игрушках.
Почему
же все-таки именно электродвигатели, а не паровые двигатели или, например двигатели внутреннего сгорания? Основным
преимуществом двигателя, работающего на электричестве, можно назвать то, что
при его работе не выделяются вредные газы, дым или пар. Для их работы не
нужны запасы топлива или воды. Электродвигатели легко установить в любом
удобном месте: и на стене, и под полом трамвая или троллейбуса и даже в
колесах лунохода.
На
производстве и в быту чаще всего используют коллекторный электродвигатель.
Перед вами модель простейшего коллекторного электродвигателя. Он состоит из
Он состоит из
неподвижной части – статора и вращающейся части – ротора. В качестве статора
выступает постоянный магнит. Ротор состоит из якоря и коллектора. Простейшим
якорем может быть электромагнит, который представляет собой сердечник и
обмотку. На валу якоря укреплён коллектор, который представляет собой два
полукольца. Они изолированы не только друг от друга, но и от вала двигателя.
Каждый вывод обмотки якоря припаивают к отдельному полукольцу. Электрический
ток от батареек поступает в обмотку якоря через щётки – специальные скользящие
контакты. Щётки чаще всего представляют собой две упругие металлические
пластины, которые соединены проводами с источником тока и прижаты к полукольцам
коллектора.
Поскольку
якорь – это электромагнит, то у него должны быть южный и северный полюса.
Давайте
узнаем, как они образуются.
Щётки
соединяются с источником тока так, как показано на рисунке. Благодаря такому
соединению электрический ток, который проходит по обмотке якоря делает одну
сторону якоря северным полюсом, а вторую – южным.
По
схеме видно, что северный полюс якоря располагается рядом с северным полюсом
статора, а южный полюс якоря – рядом с южным полюсом статора.
Одноименные
магнитные полюса отталкиваются, и якорь начинает вращаться. Вместе с якорем
поворачивается и коллектор.
Северный
полюс якоря при вращении притягивается к южному полюсу статора. Но еще до того как они сблизятся полукольца коллектора
притягиваются друг к другу и полярность якоря опять изменяется. То есть
меняется направление тока в обмотке якоря. Другими словами, коллектор в
электродвигателе – это специальный переключатель, который меняет направление в
обмотке якоря автоматически.
Как
только полярность якоря меняется, полюса вновь отталкиваются друг от друга и
вращение продолжается.
В
основном в качестве постоянного магнита для создания магнитного тока используют
электромагниты.
Существует
два способа подключения обмотки возбуждения к источнику тока: параллельно по отношению
к обмотке якоря и последовательно ей.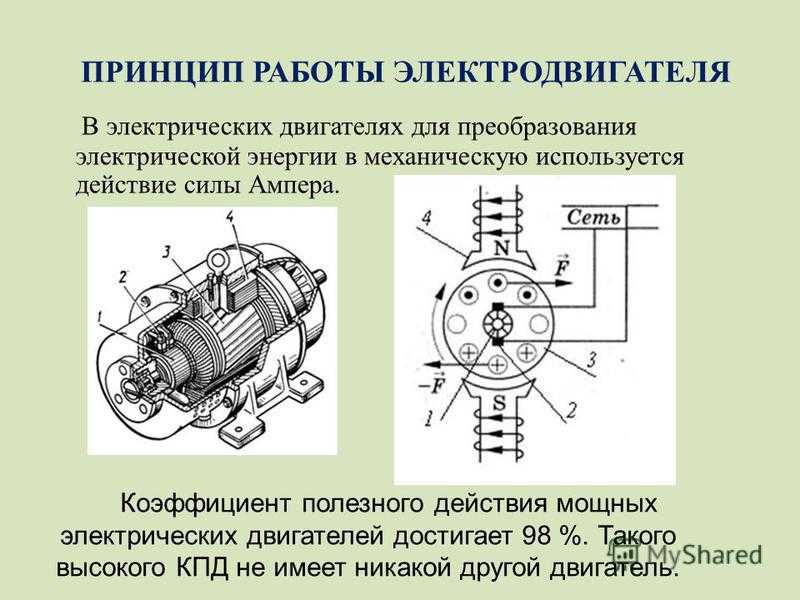
От
того каким именно способом присоединена обмотка возбуждения зависят свойства
электродвигателя.
Если
подключение параллельное, то с увеличением механической нагрузки на вал число
оборотов двигателя практически не меняется. Двигатели с таким видом соединения
обмотки возбуждения к якорю чаще всего используются для привода станков.
При
последовательном соединении с увеличением механической нагрузки на вал, число
оборотов резко уменьшается. Двигатели такого рода находят свое применение на
электрическом транспорте.
По
сравнению с полем постоянных магнитов, электромагнитное возбуждение двигателя
позволяет не только усилить магнитное поле, но и управлять его интенсивностью.
Для
того, чтобы управлять интенсивностью магнитного поля нужно реостатом менять
величину тока в цепи обмотки возбуждения. Этим изменяется число оборотов
двигателя.
Еще
один способ менять число оборотов двигателя – смена напряжения на его зажимах.
Но этот способ – более дорогой.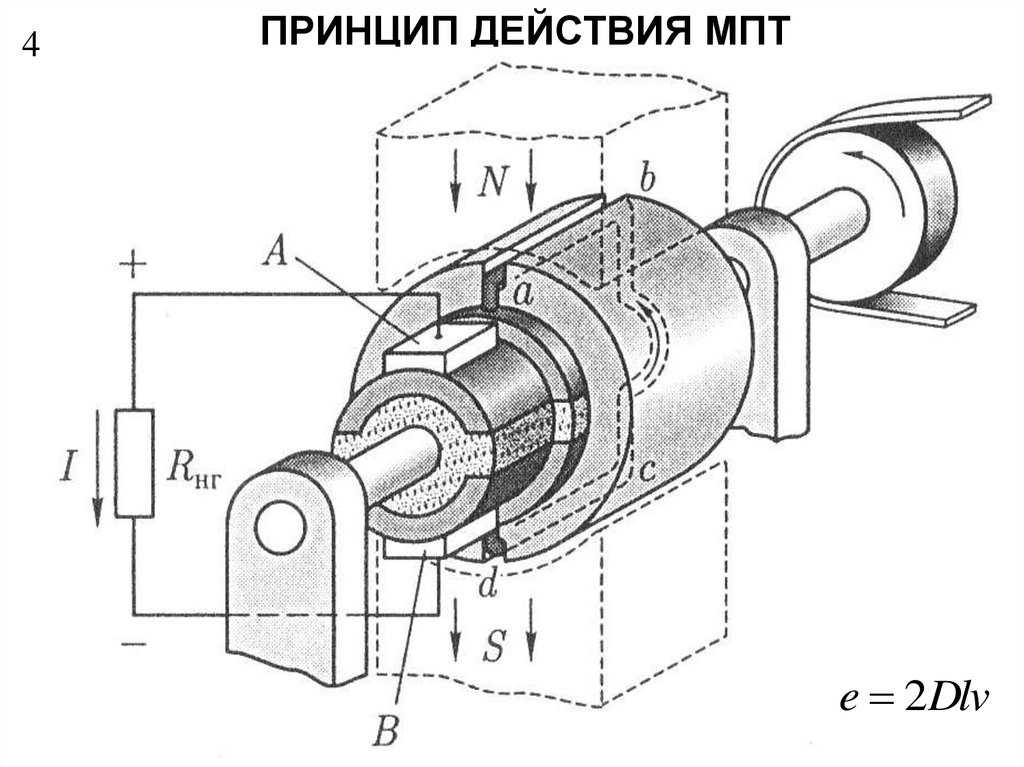 Поскольку, если через реостат проходит весь ток
Поскольку, если через реостат проходит весь ток
двигателя, то появляются дополнительные потери электроэнергии.
Понятно,
что мы рассмотрели очень упрощенную модель электродвигателя. Настоящий имеет
более сложное строение.
В
основном вместо постоянного магнита для создания магнитного поля статора
используется мощный электромагнит. Обмотка возбуждения такого двигателя одновременно
выполняет роль обмотки одного из полюсов. Соединять обмотки полюсов надо так,
чтобы полюсные наконечники сердечников имели разную полярность, которая будет
обращена к якорю.
Посмотрите,
как выглядит вращающийся ротор двигателя. Он состоит из якоря и коллектора.
Чтобы
коэффициент полезного действия двигателя возрастал, нужно на сердечнике якоря
разместить несколько обмоток. Это приводит к тому, что в коллектор входит не
два полукольца, а много медных пластин. Они изолированы не только друг от
друга, но и от вала двигателя.
Графитовые
щётки накладывают на коллектор. К гладкой поверхности коллектора щётки
прижимают с помощью пружин.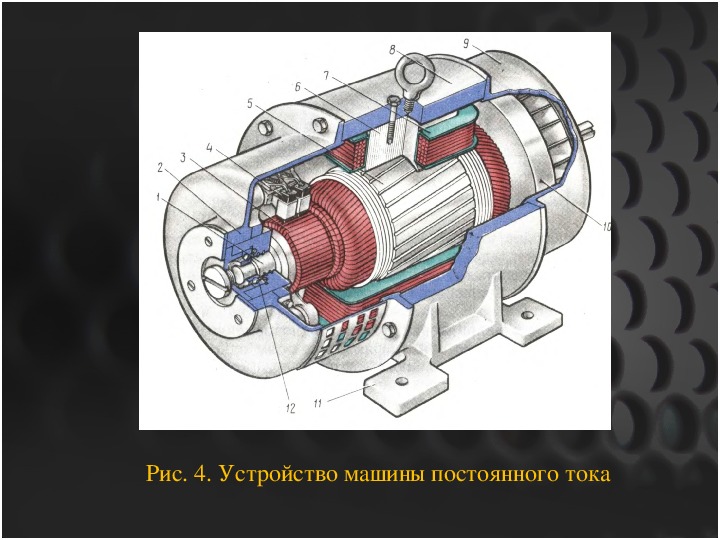 Движение якоря по валу напрямую передается рабочим
Движение якоря по валу напрямую передается рабочим
органам потребителя. Вращается вал в подшипниках, которые запрессованы в
переднюю и заднюю крышки статора. Охлаждается двигатель вентилятором,
крыльчатка которого располагается на валу.
Подведем
итоги урока.
Сегодня
мы с вами говорили о двигателе постоянного тока. Выяснили устройство и принцип
действия коллекторного электродвигателя. Узнали, что у него две основные части:
неподвижная часть — статор, который представляет собой магнит, создающий
постоянное магнитное поле. И вращающаяся часть – ротор. Составные части ротора
– якорь и коллектор. Электрический ток от источника подается на обмотку якоря
через щётки.
Рассмотрели
два случая подключения обмотки возбуждения к источнику тока в роторе, состоящем
из электромагнита.
И
познакомились с устройством настоящего рабочего электродвигателя.
Предыдущий урок 44
Техника безопасности при работе с бытовыми электроприборами
Следующий урок 46
Электроэнергетика будущего
Получите полный комплект видеоуроков, тестов и презентаций
Технология 8 класс ФГОС
Чтобы добавить комментарий зарегистрируйтесь или войдите на сайт
Двигатели постоянного тока — презентация онлайн
Похожие презентации:
Двигатели постоянного тока
Электрические двигатели постоянного тока
Обслуживание и ремонт двигателей постоянного тока
Машины постоянного тока
Машины постоянного тока
Электрические машины постоянного тока.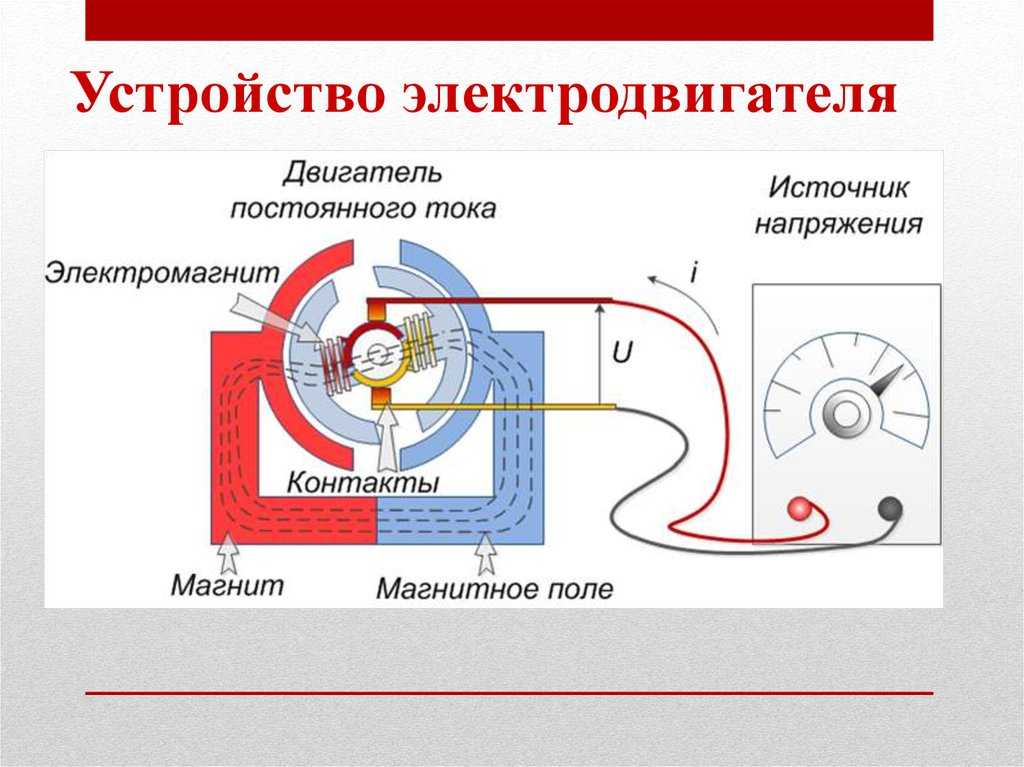 Назначение и устройство
Назначение и устройство
Электродвигатель постоянного тока
Машины постоянного тока
Электрические машины постоянного тока
Электрические машины постоянного тока
1. Двигатели постоянного тока.
Учитель технологии Губарь Геннадий Васильевич
МБОУ гимназия № 30 города Ставрополя
Электрические двигатели служат для превращения
электрической энергии в механическую. Первый в мире
электродвигатель создал русский учёный академик Борис
Семёнович Якоби в 1834 году.
Электродвигатели самых разных конструкций находят
широкое применение в деятельности человека. На
производстве и в быту электрические двигатели приводят в
движение станки и механизмы, трамваи, троллейбусы,
электровозы, доильные аппараты, приборы, игрушки и др.
Перед другими видами двигателей (паровыми, внутреннего
сгорания) электродвигатели имеют большие преимущества.
При работе они не выделяют вредных газов, дыма или пара,
не нуждаются в запасах топлива и воды, их легко установить
в любом удобном месте (на стене, под полом трамвая или
троллейбуса, в корпусе магнитофона или в колёсах лунохода).
Рассмотрим устройство и принцип действия широко
применяемого на производстве и в быту коллекторного
электродвигателя. Модель простейшего коллекторного
электродвигателя показана на рисунке.
Коллектор
Рис. Устройство простейшего коллекторного двигателя: якорь электродвигателя
начинает вращаться из-за отталкивания одноимённых полюсов якоря и статора.
Коллектор вращается вместе с якорем
Неподвижная часть электродвигателя — статор,
представляющий собой постоянный магнит, служит для
создания постоянного магнитного поля. Вращающаяся часть
электродвигателя — ротор — состоит из якоря и коллектора.
Простейший якорь — это электромагнит, состоящий из
сердечника и обмотки. Коллектор, укреплённый на валу
якоря, выполнен из двух полуколец, изолированных друг от
друга и от вала двигателя. Каждый вывод обмотки якоря
припаян к отдельному полукольцу. Электрический ток от
источника (батарейки) подаётся в обмотку якоря через
специальные скользящие контакты — щётки.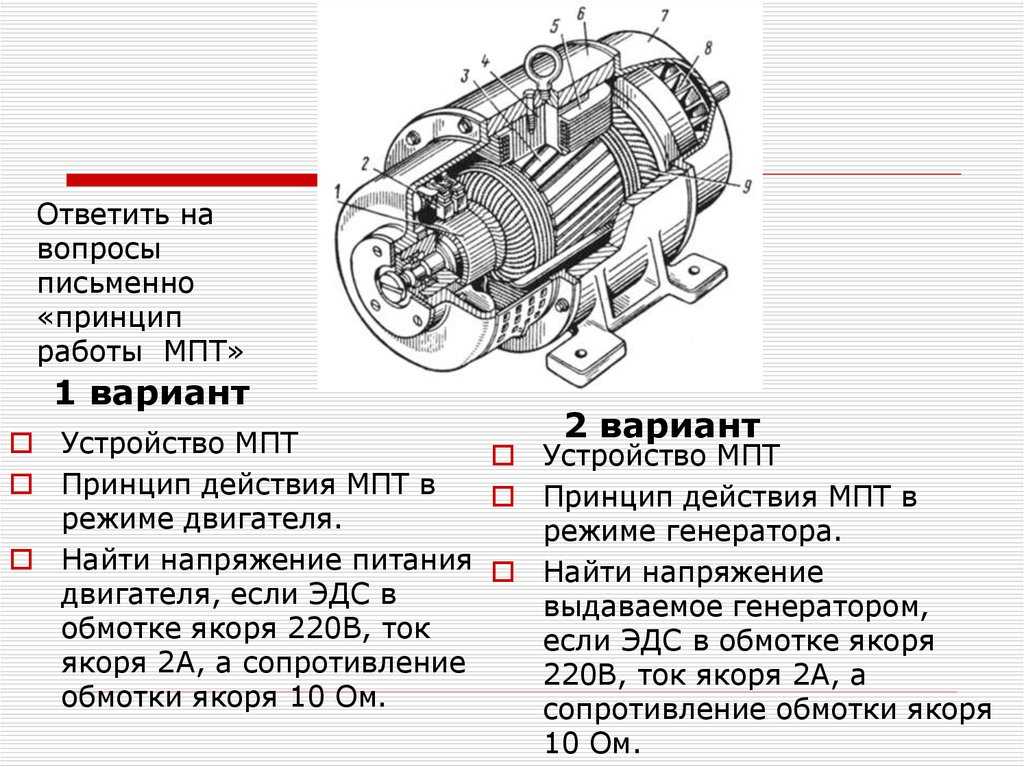 Это две упругие
Это две упругие
металлические пластины, соединённые проводами с
источником тока и прижатые к полукольцам коллектора.
Коллектор
Якорь, как любой электромагнит, должен иметь северный
и южный полюса. Как же они образуются?
Щётка, расположенная на рисунке с левой стороны,
соединяется с отрицательным зажимом батарейки, а щётка,
расположенная справа, — с положительным. Поэтому
электрический ток, проходя по обмотке якоря, делает одну
его сторону северным полюсом, а другую — южным. Из
рисунка видно, что северный полюс якоря расположен рядом
с северным полюсом статора, а южный полюс якоря — рядом
с южным полюсом статора.
Благодаря отталкиванию одноимённых магнитных
полюсов статора и якоря якорь начинает вращаться. Вместе с
якорем поворачивается и коллектор.
При вращении якоря его северный полюс притягивается к
южному полюсу статора. Однако ещё до момента сближения
этих полюсов в результате взаимного притяжения
полукольца коллектора, изменившие положение
относительно щёток, изменяют полярность якоря. При этом
При этом
изменяется направление тока в обмотке якоря. Таким
образом, коллектор в электродвигателе является
специальным переключателем, служащим для
автоматического изменения направления тока в обмотке
якоря. В результате изменения полярности якоря полюса
снова отталкиваются друг от друга и вращение продолжается.
Вместо постоянного магнита для создания магнитного поля
в двигателях обычно используют электромагниты.
Обмотку возбуждения можно подключать к источнику
тока по-разному. В одних случаях её присоединяют к тем же
зажимам источника, что и обмотку якоря, т. е. параллельно.
Такое соединение показано на рисунке, а.
Возможно и последовательное соединение якоря с обмоткой
возбуждения рис. б.
Обмотка возбуждения
а
Якорь
б
элемент
Рис. Электродвигатель постоянного тока:
а — с параллельным возбуждением,
б— с последовательным возбуждением
Способ включения обмотки возбуждения относительно
якоря отражается на свойствах электродвигателя.
При параллельном возбуждении число оборотов двигателя
мало меняется с увеличением механической нагрузки на вал.
Поэтому двигатели с параллельным возбуждением
используют для привода станков. В двигателях с
последовательным возбуждением число оборотов резко
уменьшается с увеличением механической нагрузки на вал.
Это свойство позволяет использовать такие двигатели на
электрическом транспорте.
Электромагнитное возбуждение двигателя даёт
возможность не только усилить магнитное поле по
сравнению с полем постоянных магнитов, но и управлять его
интенсивностью. Для этого необходимо изменять реостатом
величину тока в цепи обмотки возбуждения (рис.а), изменяя
тем самым число оборотов двигателя.
Менять число оборотов двигателя можно и путём
перемены напряжения на его зажимах (рис.б). Однако надо
помнить, что такой путь экономически менее выгоден, так как
через реостат будет проходить весь ток двигателя, что создаёт
дополнительные потери электрической энергии в реостате.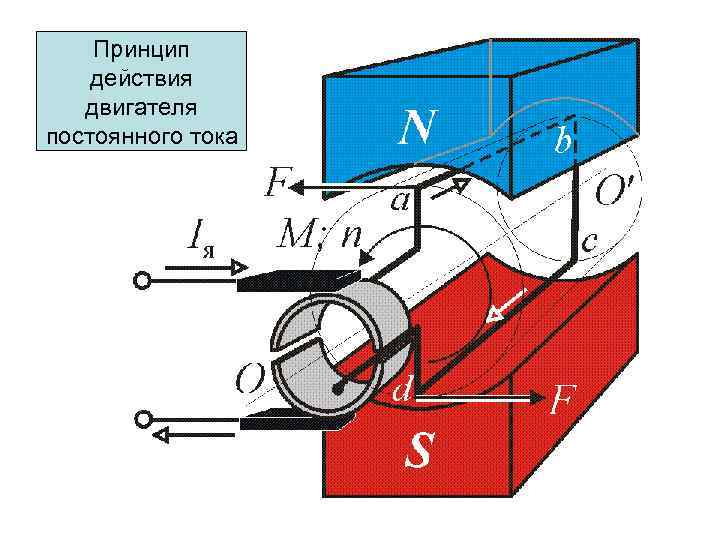
Рис. Схемы регулирования скорости в двигателях
постоянного тока:
а — путём изменения величины тока возбуждения;
б— путём смены напряжения электропитания
Настоящий рабочий электродвигатель по конструкции более
сложен (рис.), чем рассмотренная модель.
Рис. Коллекторный электродвигатель
постоянного тока:
а — общее устройство:
1 — подшипники, 2— задняя крышка
статора, 3— обмотка, 4— якорь,
5— сердечник, 6— обмотки
электромагнита, 7 — коллектор,
8 — передняя крышка статора, 9— вал,
10— вентилятор;
б— медные пластины коллектора
Вместо постоянного магнита магнитное поле статора
образуется мощными электромагнитами — магнитными
полюсами двигателя. Обмотка 3 одного из полюсов,
служащая обмоткой возбуждения, и сердечник 5 отмечены на
рисунке.
Обмотки полюсов соединяются между собой так, чтобы
полюсные наконечники сердечников имели разную
полярность, обращенную к якорю (рис.).
Рис. Соединение обмоток полюсов двигателя постоянного тока:
1 — обмотка возбуждения,
2— соединительный провод
Вращающийся ротор двигателя состоит из якоря и
коллектора (рис. ).
).
Рис. Ротор двигателя постоянного тока:
1 — щётки,
2— коллектор,
3— соединительные проводники,
4— обмотка якоря,
5— вал
Чтобы увеличить коэффициент полезного действия
электродвигателя (см. рис.), на сердечнике якоря 4
размещают несколько обмоток 6. Поэтому и коллектор 7
состоит не из двух полуколец, а из многих изолированных
друг от друга и от вала двигателя медных пластин (рис. б).
Коллектор имеет гладкую внешнюю поверхность, на которую
накладывают щётки. Щётки из графита прижимаются к
коллектору с помощью пружин. Движение якоря передаётся
по валу, а с него — непосредственно рабочим органам
потребителя. Вал вращается в подшипниках 1,
запрессованных в заднюю 2 и переднюю 8 крышки статора.
Охлаждение электродвигателя обеспечивается вентилятором
10, крыльчатка которого закреплена на валу 9.
Домашнее задание
1. Изучите § 46 учебника.
English
Русский
Правила
Устройство и принцип действия двигателя постоянного тока.
Устройство
простейшего электродвигателя
постоянного тока.
На рис. 1-1 представлен простейший
электродвигатель
постоянного тока,
а на рис. 1-2 дано его схематическое
изображение в осевом направлении.
Неподвижная часть двигателя, называемая
индуктором, состоит из полюсов и круглого
стального ярма, к которому прикрепляются
полюсы. Назначением индуктора является
создание в электродвигателе
основного магнитного потока. Индуктор
изображенной на рис. 1-1 простейшего
электродвигателя
имеет два полюса
1 (ярмо индуктора на рис. 1-1 не показано).
Вращающаяся часть электродвигателя
состоит из укрепленных на валу
цилиндрического якоря 2 и коллектора.
3. Якорь состоит из сердечника, набранного
из листов электротехнической стали, и
обмотки, укрепленной на сердечнике
якоря. Обмотка якоря в показанном на
рис. 1-1 и 1-2 простейшем
электродвигателе
имеет один виток. Концы витка соединены
Концы витка соединены
с изолированными от вала медными
пластинами коллектора, число которых
в рассматриваемом случае равно двум.
На коллектор налегают две неподвижные
щетки 4, с помощью которых обмотка якоря
соединяется с внешней цепью. Основной
магнитный поток в нормальных
электродвигателях
постоянного тока
создается обмоткой возбуждения, которая
расположена на сердечниках полюсов и
питается постоянным током. Магнитный
поток проходит от северного полюса N
через якорь к южному полюсу S и от него
через ярмо снова к северному полюсу.
Сердечники полюсов и ярмо также
изготовляются из ферромагнитных
материалов. Режим
генератора.
Рассмотрим сначала работу электродвигателя
в режиме генератора.
Рис.
1-1. Простейший электродвигатель
постоянного тока
Рис.
1-2. Работа простейшего электродвигателя
постоянного
тока в режиме Генератора (а) и двигателя
(б).
Предположим,
что якорь электродвигателя
(рис. 1-1 и 1-2, а) приводится во вращение
1-1 и 1-2, а) приводится во вращение
по часовой стрелке. Тогда в проводниках
обмотки якоря индуктируется ЭДС,
направление которой может быть определено
по правилу правой руки (рис. 1-3, а) и
показано на рис. 1-1 и 1-2, а. Поскольку
поток полюсов предполагается неизменным,
то эта ЭДС индуктируется только вследствие
вращения якоря и называется ЭДС вращения.
В обоих проводниках вследствие
симметрии индуктируются одинаковые
ЭДС, которые по контуру витка складываются.
Частота ЭДС
f в двухполюсном
электродвигателе равна скорости
вращения якоря n,
выраженной в оборотах в секунду: f
= n, а в общем случае,
когда машина имеет р
пар полюсов с чередующейся полярностью:
f = pn
Таким
образом, в генераторе коллектор является
механическим выпрямителем, который
преобразовывает переменный ток обмотки
якоря в постоянный ток во внешней
цепи.
Рис.
1-3. Правила правой (а) и левой (б) руки.
При
включении двигателя возникает большой
пусковой ток, превышающий номинальный
в 10 — 20 раз. Для ограничения пускового
Для ограничения пускового
тока двигателей мощностью более 0,5 кВт
последовательно с цепью якоря включают
пусковой реостат (рис. 7).Величину
сопротивления пускового реостата можно
определить по выражению
Rn
=U/(1,8 — 2,5)Iном-Rя
где
U — напряжение сети,
В;
Iном
— номинальный ток двигателя. А;
Rя
— сопротивление обмотки якоря, Ом.
Перед
включением двигателя необходимо
убедиться в том, что рычаг 2
пускового реостата (рис.7) находится на
холостом контакте 0.
затем включают рубильник и рычаг реостата
переводят на первый промежуточный
контакт. При этом двигатель возбуждается,
а в цепи якоря появляется пусковой ток,
величина которого ограничена всеми
четырьмя секциями сопротивления Rn. По
мере увеличения частоты вращения якоря
пусковой ток уменьшается и рычаг реостата
переводят на второй, третий контакт и
т.д., пока он не окажется на рабочем
контакте. Пусковые реостаты рассчитаны
на кратковременный режим работы, а
поэтому рычаг реостата нельзя длительно
задерживать на промежуточных контактах:
в этом случае сопротивления реостата
перегреваются и могут перегореть.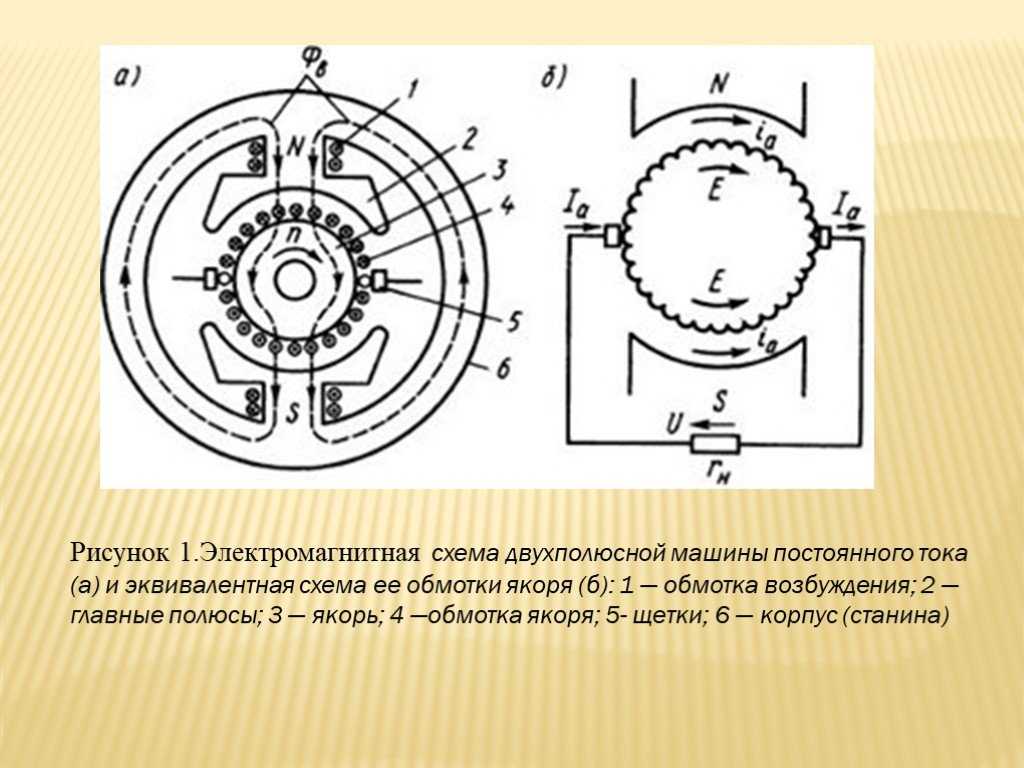
Прежде чем отключить двигатель от сети,
необходимо рукоятку реостата перевести
в крайнее левое положение. При этом
двигатель отключается от сети, но цепь
обмотки возбуждения остается замкнутой
на сопротивление реостата. В противном
случае могут появиться большие
перенапряжения в обмотке возбуждения
в момент размыкания цепи. При пуске в
ход двигателей постоянного тока
регулировочный реостат в цепи обмотки
возбуждения следует полностью вывести
для увеличения потока возбуждения. Для
пуска двигателей с последовательным
возбуждением применяют двухзажимные
пусковые реостаты, отличающиеся от
трехзажимных отсутствием медной дуги
и наличием только двух зажимов — Л и Я.
Механическая
характеристика двигателей постоянного
тока (n=f(M))
с параллельным, последовательным и
смешанным возбуждением.
Двигатели
постоянного тока находят широкое
применение в промышленных, транспортных
и других установках, где требуется
широкое и плавное регулирование скорости
вращения (прокатные станы, мощные
металлорежущие станки, электрическая
тяга на транспорте и т. д.).
д.).
По
способу возбуждения двигатели постоянного
тока подразделяются аналогично
генераторам на двигатели независимого,
параллельного, последовательного и
смешанного возбуждения. Схемы двигателей
и генераторов с данным видом возбуждения
одинаковы (рис. 9-1). В двигателях
независимого возбуждения токи якоря
1а
и
нагрузки равны: I
= 1а,
в
двигателях параллельного и смешанного
возбуждения I=
Iа
+Ibи
в двигателях последовательного
возбуждения I
= 1а
=
Iв.
С независимым возбуждением от отдельного
источника тока обычно выполняются
мощные двигатели с целью более удобного
и экономичного регулирования величины
тока возбуждения. По своим свойствам
двигатели независимого и параллельного
возбуждения почти одинаковы, и поэтому
первые ниже отдельно не рассматриваются.
Рис
10-1 Энергетическая диаграмма двигателя
параллельного возбуждения
Энергетическая
диаграмма двигателя
параллельного возбуждения изображена
на рис. 10-1. Первичная мощность Рх
10-1. Первичная мощность Рх
является
электрической и потребляется из питающей
сети. За счет этой мощности покрываются
потери на возбуждение рв
и электрические потери рдла
= PaRa
в
цепи якоря, а оставшаяся часть составляет
электромагнитную мощность якоря РЭм
= EJa,
которая
превращается в механическую мощность
Рмх.
Потери магнитные рмг,
добавочные рд
и механические рмх
покрываются за счет механической
мощности, а остальная часть этой мощности
представляет собой, полезную механическую
мощность Р2
на валу. Аналогичные энергетические
диаграммы, иллюстрирующие преобразование
энергии в двигателе, можно построить и
для других типов двигателей
Двигатели постоянного тока — MirMarine
Cайт Mirmarine.net просит поддержки.
Из за введенных санкций и событий с 24 февраля сайт Mirmarine. net оказался в тяжелом положении.
net оказался в тяжелом положении.
Если у вас есть возможность, поддержите финансово.
Поддержать
- Главная
- Электромеханик
- Двигатели постоянного тока
Двигателями постоянного тока называются электрические машины постоянного тока, преобразующие электрическую энергию в механическую.
В двигателе магнитные поля создаются полюсами обмотки возбуждения и обмоткой якоря, по которым пропускается ток. При пропускании через них постоянного тока, якорь машины придет во вращение. Направление вращения якоря определяется правилом левой руки. При этом, если изменить направление тока в якоре или в обмотке возбуждения, то направление вращения двигателя также изменится.
При работе электродвигателя его якорь с обмоткой, вращаясь в магнитном поле, создаваемом магнитами полюсов, пересекает силовые магнитные линии магнитного потока полюсов и, следовательно, согласно закону электромагнитной индукции, в обмотке якоря индуктируется э. д. с. Направление этой э. д. с. обратно направлению тока, текущего в обмотке якоря (определяется по правилу правой руки), ввиду чего она называется обратной э. д. с. или противоэлектродвижущей силой (п. э. д. с.).
Необходимо заметить, что во время пуска двигателя противоэлектродвижущая сила будет равна нулю и ток якоря может достигнуть недопустимо большого значения, так как сопротивление обмотки якоря незначительно. Поэтому в момент пуска в цепь якоря последовательно вводят дополнительное сопротивление—пусковой реостат, выполняющий роль дополнительного сопротивления при пуске во избежание разрушения обмотки якоря. С началом вращения якоря нарастает п. э. д. с., снижающая величину тока в якоре, поэтому по мере раскручивания двигателя (с увеличением числа оборотов двигателя), сопротивление пускового реостата постепенно уменьшают и совсем выключают, как только двигатель разовьет номинальное число оборотов, так как в этом случае обмотка якоря перегрузки испытывать не будет.
Электродвигатели постоянного тока, так же как и генераторы, в зависимости от способа включения обмоток возбуждения и якоря подразделяются на двигатели:
- с независимым возбуждением;
- с последовательным возбуждением или сериесные;
- с параллельным возбуждением или шунтовые;
- смешанного возбуждения или компаундные;
На судах морского флота электродвигатели постоянного тока последовательного возбуждения с легкой параллельной обмоткой применяются для привода в действие палубных механизмов (брашпилей, шпилей, лебедок, кранов), где требуется большой вращающий момент при пуске. Электродвигатели постоянного тока параллельного возбуждения применяются для привода механизмов, у которых необходимо иметь постоянное число оборотов независимо от их нагрузки и у которых не требуется наличие большого пускового момента (вспомогательные механизмы и насосы, обслуживающие главные двигатели и судовые системы, станки и т. д.).
д.).
Электродвигатели постоянного тока смешанного возбуждения применяются для привода в движение механизмов, требующих большого пускового момента и сохранения постоянного числа оборотов, а также имеющих значительный маховой момент (палубные механизмы, рулевые приводы, валоповоротные устройства и др.).
Наиболее широкое распространение эти двигатели получили за свои положительные качества, к которым можно отнести:
- большой пусковой момент;
- способность выносить значительную перегрузку;
- допустимость регулировки числа оборотов в широких пределах;
- сохранение постоянного числа оборотов при изменяющейся нагрузке.
По конструктивному выполнению электродвигатели делятся на электродвигатели с горизонтальным валом и электродвигатели с вертикальным валом.
По типу защиты от воздействия внешней среды электродвигатели бывают такие же, как и генераторы:
- открытые;
- защищенные;
- брызгозащищенные;
- водозащищенные;
- герметические;
- взрывобезопасные;
Процессы управления электродвигателями постоянного тока сводятся в основном к выполнению следующих операций:
- пуску в ход электродвигателя;
- остановке;
- торможению;
- реверсированию и регулированию скорости вращения электродвигателя
Эти операции могут быть выполнены вручную, автоматически или полуавтоматически при помощи соответствующей аппаратуры управления (пусковые и регулировочные реостаты, электрические и механические тормозные устройства и др. ).
).
Пусковые реостаты устанавливают для ограничения силы пускового тока. Число оборотов электродвигателя регулируют изменением напряжения на зажимах якоря или изменением магнитного потока, создаваемого обмоткой возбуждения (т. е. изменением силы тока возбуждения электродвигателя при помощи регулировочного реостата). Для быстрой остановки электродвигателей необходимо применять торможение. Торможение электродвигателей постоянного тока может быть механическим и электрическим.
Механическое торможение осуществляется при помощи колодочных, ленточных и дисковых тормозов.
Электрическое торможение может быть произведено или в виде полезного торможения, при котором двигатель обращается в генератор и возвращает электрическую энергию в сеть, или же в виде реостатного торможения, при котором электрическая энергия превращается в тепловую, выделяющуюся в реостате.
Изменить направление вращения электродвигателя постоянного тока можно двумя способами: изменением направления тока в полюсных обмотках возбуждения, оставив направление тока в обмотке якоря без изменения; изменением направления тока в обмотке якоря, оставив без изменения направление тока в полюсных обмотках возбуждения. Если одновременно изменить направление тока и в обмотке якоря, и в обмотке возбуждения, то направление вращения двигателя не изменится.
Если одновременно изменить направление тока и в обмотке якоря, и в обмотке возбуждения, то направление вращения двигателя не изменится.
Электромеханик
Все о контроллерах двигателей постоянного тока
Двигатели постоянного тока по-прежнему актуальны в современной промышленности, несмотря на то, что они являются одной из старейших конструкций электродвигателей. Как они выдержали испытание временем, особенно против всех удивительных новых машин 21-го века?
Есть много возможных ответов на этот вопрос, но их хорошая управляемость является основной причиной, по которой двигатели постоянного тока сохранились. Эта простая машина преобразует постоянный ток в механическое вращение, которым можно управлять, просто изменяя входное напряжение или меняя местами его выводы. Элегантность двигателей постоянного тока привела к производству многих контроллеров двигателей постоянного тока, которые часто имеют простую конструкцию и обеспечивают достаточную производительность для своей стоимости. В этой статье будут рассмотрены некоторые распространенные контроллеры двигателей постоянного тока, принцип их работы и обсуждены самые популярные приложения для этих систем.
В этой статье будут рассмотрены некоторые распространенные контроллеры двигателей постоянного тока, принцип их работы и обсуждены самые популярные приложения для этих систем.
Что такое контроллеры двигателей постоянного тока?
Проще говоря, контроллер двигателя постоянного тока — это любое устройство, которое может управлять положением, скоростью или крутящим моментом двигателя постоянного тока. Существуют контроллеры для щеточных двигателей постоянного тока, бесщеточных двигателей постоянного тока, а также универсальных двигателей, и все они позволяют операторам задавать желаемое поведение двигателя, даже если их механизмы для этого различаются.
В наших статьях о шунтирующих двигателях постоянного тока, двигателях постоянного тока с последовательной обмоткой и бесщеточных двигателях постоянного тока подробно объясняется, как работают машины постоянного тока. Подводя итог, можно сказать, что кривая скорость/крутящий момент двигателей постоянного тока является обратно линейной, что означает, что их крутящий момент пропорционально уменьшается по мере увеличения оборотов двигателя. Это позволяет легко управлять, так как снижение скорости увеличивает крутящий момент, и наоборот. Кроме того, в отличие от некоторых двигателей переменного тока, двигатели постоянного тока легко реверсируются простым переключением их выводов, так что постоянный ток течет в противоположном направлении. Контроллеры двигателей постоянного тока используют эти характеристики уникальным образом, и в этой статье будут рассмотрены наиболее популярные методы.
Это позволяет легко управлять, так как снижение скорости увеличивает крутящий момент, и наоборот. Кроме того, в отличие от некоторых двигателей переменного тока, двигатели постоянного тока легко реверсируются простым переключением их выводов, так что постоянный ток течет в противоположном направлении. Контроллеры двигателей постоянного тока используют эти характеристики уникальным образом, и в этой статье будут рассмотрены наиболее популярные методы.
Типы контроллеров двигателей постоянного тока
Ниже приведены некоторые распространенные методы управления двигателем постоянного тока. Обратите внимание, что эти методы не являются исчерпывающими и что двигателями постоянного тока можно управлять многими способами, включая контроллеры серводвигателей (подробнее см. в нашей статье о контроллерах серводвигателей):
Контроллер направления: H-мост
H-мостовая схема — один из самых простых способов управления двигателем постоянного тока. На рисунке 1 ниже показана упрощенная принципиальная схема H-моста:
.
Рис. 1: H-мостовая схема для управления направлением вращения двигателя постоянного тока.
Имеется четыре переключателя, управляемых парами (1 и 4, 2 и 3), и когда любая из этих пар замкнута, они замыкают цепь и приводят двигатель в действие. Таким образом, 4-квадрантный двигатель можно создать, соединив вместе определенные переключатели, при этом смена полярности будет по-разному влиять на двигатель. По сути, эта схема переключает выводы двигателя постоянного тока, который меняет направление вращения по команде. Они легко продаются в виде чипов, и их можно найти в большинстве контроллеров на основе микропроцессоров, поскольку H-мост можно уменьшить с помощью транзисторов до очень маленьких размеров.
H-мосты могут не только изменять направление вращения двигателя, но и использоваться для управления скоростью. Если требуется только направленное управление, то H-мост будет использоваться в качестве так называемого нерекуперативного привода постоянного тока. Однако для создания рекуперативных приводов постоянного тока можно добавить больше сложности. На рис. 2 показан график, иллюстрирующий работу рекуперативных приводов:
Однако для создания рекуперативных приводов постоянного тока можно добавить больше сложности. На рис. 2 показан график, иллюстрирующий работу рекуперативных приводов:
.
Рис. 2: графики, представляющие направление скорости и крутящего момента при изменении полярности на двигателе постоянного тока. Обратите внимание, как создается движение, когда они работают в одном направлении, и как достигается торможение, когда они противостоят друг другу.
Большинство двигателей постоянного тока замедляются, просто отключая питание двигателя; рекуперативные приводы включают возможности торможения, когда переключение полярности во время работы двигателя вызывает замедление. Квадранты 1 и 3 считаются «моторными» квадрантами, где двигатель обеспечивает ускорение в любом направлении и управляется нерекуперативными приводами. Квадранты 2 и 4 считаются «тормозящими» квадрантами, в которых двигатель замедляется, и от этого выигрывают рекуперативные приводы. Когда скорость двигателя противоположна крутящему моменту двигателя, двигатель становится генератором, где его механическая энергия возвращает ток к источнику питания (известное как «рекуперативное торможение»). Эта функция снижает потери энергии и может перезаряжать источник питания, эффективно повышая эффективность двигателя. На рис. 3 показана упрощенная принципиальная схема для каждого квадранта, а также то, как квадранты 2 и 4 направляют ток обратно в источник для рекуперации энергии:
Когда скорость двигателя противоположна крутящему моменту двигателя, двигатель становится генератором, где его механическая энергия возвращает ток к источнику питания (известное как «рекуперативное торможение»). Эта функция снижает потери энергии и может перезаряжать источник питания, эффективно повышая эффективность двигателя. На рис. 3 показана упрощенная принципиальная схема для каждого квадранта, а также то, как квадранты 2 и 4 направляют ток обратно в источник для рекуперации энергии:
Рисунок 3: Принципиальные схемы для каждого квадранта, показывающие величины напряжения двигателя и питания. Обратите внимание, как направление тока (I
a ) перемещается от двигателя к источнику питания в квадрантах 2 и 4.
Когда двигатель замедляется, E a (напряжение, создаваемое/используемое двигателем) больше, чем напряжение питания (V a ), и ток будет течь обратно в источник питания. В настоящее время рекуперативное торможение исследуется в электромобилях и других приложениях, которым необходимо максимизировать эффективность. Этот метод не только обеспечивает управление двигателем постоянного тока, но также обеспечивает разумный способ снижения энергопотребления.
В настоящее время рекуперативное торможение исследуется в электромобилях и других приложениях, которым необходимо максимизировать эффективность. Этот метод не только обеспечивает управление двигателем постоянного тока, но также обеспечивает разумный способ снижения энергопотребления.
Регулятор скорости: широтно-импульсная модуляция (ШИМ)
PWM можно использовать во многих типах двигателей, как показано в нашей статье о контроллерах двигателей переменного тока. По сути, схемы ШИМ изменяют скорость двигателя, имитируя снижение/увеличение напряжения питания. Контроллеры привода с регулируемой скоростью посылают на двигатель периодические импульсы, которые в сочетании со сглаживающим эффектом, вызванным индуктивностью катушки, заставляют двигатель работать так, как если бы он питался от более низкого/более высокого напряжения. Например, если на двигатель 12 В подается ШИМ-сигнал высокого уровня (12 В) в течение двух третей каждого периода и низкого уровня (0 В) в оставшуюся часть, двигатель будет эффективно работать при двух третях полного напряжения. или 8 В. Таким образом, процент снижения напряжения или «рабочий цикл» ШИМ будет изменять скорость двигателя. ШИМ легко и недорого реализовать, и можно выбрать практически любой рабочий цикл, что позволяет почти непрерывно контролировать скорость двигателя. ШИМ часто сочетается с H-мостами, чтобы обеспечить управление как скоростью, направлением, так и торможением.
или 8 В. Таким образом, процент снижения напряжения или «рабочий цикл» ШИМ будет изменять скорость двигателя. ШИМ легко и недорого реализовать, и можно выбрать практически любой рабочий цикл, что позволяет почти непрерывно контролировать скорость двигателя. ШИМ часто сочетается с H-мостами, чтобы обеспечить управление как скоростью, направлением, так и торможением.
Контроллер якоря: переменное сопротивление
Другой способ повлиять на скорость двигателя постоянного тока — изменить ток, подаваемый либо через катушку возбуждения, либо через якорь. Скорость выходного вала будет изменяться при изменении тока через эти катушки, так как его скорость пропорциональна силе магнитного поля якоря (определяется током). Переменные резисторы или реостаты, включенные последовательно с этими катушками, могут использоваться для изменения тока и, следовательно, скорости. Пользователи могут увеличить сопротивление обмотки якоря, чтобы уменьшить скорость, или увеличить сопротивление статора, чтобы увеличить ее, регулируя сопротивление. Обратите внимание, что этот метод снижает эффективность двигателя, поскольку увеличение сопротивления означает потерю большего количества энергии на нагрев, и именно поэтому ШИМ является предпочтительным типом контроллера двигателя постоянного тока.
Обратите внимание, что этот метод снижает эффективность двигателя, поскольку увеличение сопротивления означает потерю большего количества энергии на нагрев, и именно поэтому ШИМ является предпочтительным типом контроллера двигателя постоянного тока.
Применение и критерии выбора
При рассмотрении вопроса о покупке контроллера двигателя постоянного тока есть несколько ключевых вопросов, на которые должны ответить либо ваши исследования, либо поставщик. Контроллеры двигателей постоянного тока сложно определить из-за их разнообразия, поэтому приведенный ниже список вопросов будет надежным инструментом при выборе контроллера для вашего проекта. Обязательно найдите самую последнюю информацию о новейших доступных технологиях, связавшись с вашим поставщиком, и ответьте на эти вопросы, чтобы сделать осознанный выбор:
- Каков диапазон номинального напряжения используемого двигателя и какие части этого диапазона он будет использовать?
- Какой тип управления требуется (скорость, крутящий момент, направление или все три)?
- Какой тип двигателя находится под управлением?
- Какой непрерывный ток может обеспечить контроллер, и соответствует ли он постоянному потреблению тока двигателем под нагрузкой?
- Имеет ли система встроенную защиту от перегрузки по току/тепловую защиту?
- Каким будет метод управления при использовании микропроцессорных приводов (ШИМ, R/C, аналоговое напряжение и т. д.)? Необходимо ли программное обеспечение?
- Вам нужен контроллер для двух двигателей (один контроллер для двух независимых двигателей)?
 д.)? Необходимо ли программное обеспечение?
д.)? Необходимо ли программное обеспечение?Доступно столько же контроллеров двигателей постоянного тока, сколько и самих двигателей постоянного тока; их изменчивость является одним из их самых сильных преимуществ. Их применения также столь же многочисленны, как и большинство разработчиков, получающих выгоду от того, что пользователь вносит какой-либо вклад в свой двигатель постоянного тока. В областях робототехники, производства, военного применения, автомобилей и многих других областях контроллеры двигателей постоянного тока используются с отличными результатами. В зависимости от того, как они используются, контроллеры двигателей постоянного тока могут обеспечить простое средство управления с хорошей точностью по приемлемой цене.
Резюме
В этой статье представлено понимание того, что такое контроллеры двигателей постоянного тока и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть сведения о конкретных продуктах.
Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть сведения о конкретных продуктах.
Источники:
- http://srjcstaff.santarosa.edu/~lwillia2/2B/2Bch30.pdf
- https://itp.nyu.edu/physcomp/lessons/dc-motors/dc-motors-the-basics/
- https://www.ece.uvic.ca
- https://www.tigoe.com/pcomp/code/circuits/motors/controlling-dc-motors/
- https://www.elprocus.com/what-are-the-best-ways-to-control-the-speed-of-dc-motor/
- https://www.robotshop.com/community/tutorials/show/how-to-make-a-robot-lesson-5-choosing-a-motor-controller
Другие изделия для двигателей
- Типы катушек индуктивности и сердечников
- Типы контроллеров двигателей и приводов
- Типы двигателей постоянного тока
- и двигатели постоянного тока — в чем разница?
- Все об асинхронных двигателях — что это такое и как они работают
- Типы двигателей переменного тока
- Все о синхронных двигателях — что это такое и как они работают
- Понимание двигателей
- — как они работают?
- Что такое двигатель с короткозамкнутым ротором и как он работает?
- Что такое двигатель с фазным ротором и как он работает?
- Все о реактивных двигателях — что это такое и как они работают
- Все о бесщеточных двигателях постоянного тока — что это такое и как они работают
- Все о двигателях с постоянными магнитами — что это такое и как они работают
- Все о двигателях постоянного тока с обмоткой серии — что это такое и как они работают
- Все о шунтирующих двигателях постоянного тока — что это такое и как они работают
- Все о шаговых двигателях — что это такое и как они работают
- и серводвигатели — в чем разница?
- Все о контроллерах двигателей переменного тока — что это такое и как они работают
- Синхронные двигатели и асинхронные двигатели — в чем разница?
Двигатели переменного тока
Однофазные промышленные двигатели
Шаговые двигатели
Еще из раздела Инструменты и элементы управления
Smart Motor Devices OÜ — Домашняя страница.
 Разработка и продажа шаговых двигателей, щеточных и бесщеточных контроллеров и драйверов постоянного тока
Разработка и продажа шаговых двигателей, щеточных и бесщеточных контроллеров и драйверов постоянного тока
ЩЕТКА ПОСТОЯННОГО ТОКА
Щеточный двигатель постоянного тока является одним из наиболее широко используемых типов электродвигателей. Щеточные двигатели просты в использовании и, как правило, не требуют никакой электроники для работы. Сразу же имеется возможность улучшить движение щеточного двигателя постоянного тока, чтобы отрегулировать движение для точного применения. Мы поставляем двигатели постоянного тока с планетарными, цилиндрическими и червячными редукторами.
Мы разрабатываем и производим драйверы и контроллеры для щеточных двигателей постоянного тока с током до 20А. Эти блоки контролируют скорость, направление, плавный пуск и останов двигателя. Для двигателей с энкодером предусмотрена функция стабилизации скорости. Коммуникационный интерфейс позволяет управлять приводом двигателя щетки с ПК или ПЛК.
Щеточный двигатель постоянного тока является одним из наиболее широко используемых типов электродвигателей. Щеточные двигатели просты в использовании и, как правило, не требуют никакой электроники для работы. Сразу же имеется возможность улучшить движение щеточного двигателя постоянного тока, чтобы отрегулировать движение для точного применения. Мы поставляем двигатели постоянного тока с планетарными, цилиндрическими и червячными редукторами.
Щеточные двигатели просты в использовании и, как правило, не требуют никакой электроники для работы. Сразу же имеется возможность улучшить движение щеточного двигателя постоянного тока, чтобы отрегулировать движение для точного применения. Мы поставляем двигатели постоянного тока с планетарными, цилиндрическими и червячными редукторами.
Мы проектируем и производим драйверы и контроллеры для щеточных двигателей постоянного тока с током до 20А. Эти блоки контролируют скорость, направление, плавный пуск и останов двигателя. Для двигателей с энкодером предусмотрена функция стабилизации скорости. Коммуникационный интерфейс позволяет управлять приводом двигателя щетки с ПК или ПЛК.
Двигатели
Приводы
Контроллеры
DC БЕСЩЕТОЧНЫЙ
Бесщеточные двигатели постоянного тока (известные также как двигатели BLDC) обеспечивают низкий уровень шума и высокую скорость движения. Это синхронные электродвигатели с питанием от постоянного тока, с электронным управлением коммутацией на основе внутренних датчиков Холла. Отсутствие механической коммутации со щетками обеспечивает долгий срок службы, низкий уровень шума, высокий КПД и не требует обслуживания.
Отсутствие механической коммутации со щетками обеспечивает долгий срок службы, низкий уровень шума, высокий КПД и не требует обслуживания.
Мы разрабатываем и производим драйверы и контроллеры для бесколлекторных двигателей постоянного тока с током до 50А. Эти устройства управляют трехфазными бесколлекторными двигателями постоянного тока с датчиками Холла, обеспечивают плавное движение и просты в использовании. Коммуникационный интерфейс позволяет управлять бесколлекторным приводом с ПК или ПЛК.
Бесщеточные двигатели постоянного тока (известные также как двигатели BLDC) обеспечивают низкий уровень шума и высокую скорость движения. Это синхронные электродвигатели с питанием от постоянного тока, с электронным управлением коммутацией на основе внутренних датчиков Холла. Отсутствие механической коммутации со щетками обеспечивает долгий срок службы, низкий уровень шума, высокий КПД и не требует обслуживания.
Мы проектируем и производим драйверы и контроллеры для бесколлекторных двигателей постоянного тока с током до 50А. Эти устройства управляют трехфазными бесколлекторными двигателями постоянного тока с датчиками Холла, обеспечивают плавное движение и просты в использовании. Коммуникационный интерфейс позволяет управлять бесколлекторным приводом с ПК или ПЛК.
Эти устройства управляют трехфазными бесколлекторными двигателями постоянного тока с датчиками Холла, обеспечивают плавное движение и просты в использовании. Коммуникационный интерфейс позволяет управлять бесколлекторным приводом с ПК или ПЛК.
Двигатели
Контроллеры
ШАГОВЫЙ
Шаговые двигатели позволяют достичь баланса между точностью позиционирования и стоимостью системы. Редукторы не нужны, так как шаговые двигатели обеспечивают высокий крутящий момент на низких скоростях. При соответствующих настройках режима контроллера и опций микрошага эти двигатели обеспечивают точные движения и легкое управление. Системы с шаговыми двигателями обеспечивают длительный срок службы, так как в них отсутствуют щетки и другие детали коммутационного движения.
Мы разрабатываем и производим высококачественные и экономичные драйверы и контроллеры для управления шаговыми двигателями.
Шаговые двигатели позволяют достичь баланса между точностью позиционирования и стоимостью системы. Редукторы не нужны, так как шаговые двигатели обеспечивают высокий крутящий момент на низких скоростях. При соответствующих настройках режима контроллера и опций микрошага эти двигатели обеспечивают точные движения и легкое управление. Системы с шаговыми двигателями обеспечивают длительный срок службы, так как в них отсутствуют щетки и другие детали коммутационного движения.
Редукторы не нужны, так как шаговые двигатели обеспечивают высокий крутящий момент на низких скоростях. При соответствующих настройках режима контроллера и опций микрошага эти двигатели обеспечивают точные движения и легкое управление. Системы с шаговыми двигателями обеспечивают длительный срок службы, так как в них отсутствуют щетки и другие детали коммутационного движения.
Мы разрабатываем и производим высококачественные и экономичные драйверы и контроллеры для управления шаговыми двигателями.
Двигатели
Контроллеры
Драйверы
проверить все продукты
ПОЧЕМУ ВЫБИРАЕТЕ НАС?
Smart Motor Devices OÜ является
разработчик, производитель и
поставщик управления двигателем
устройства как для OEM-производителей, так и для
одиночные пользователи вокруг
глобус.
Благодаря нашему дизайну управления и
экспертиза развития мы
поставлять подходящие надежные и
простые в использовании решения для
совсем другое приложение
поля и системы.
Пользователи получают полную техническую информацию и квалифицированные консультации по запрашиваемой продукции.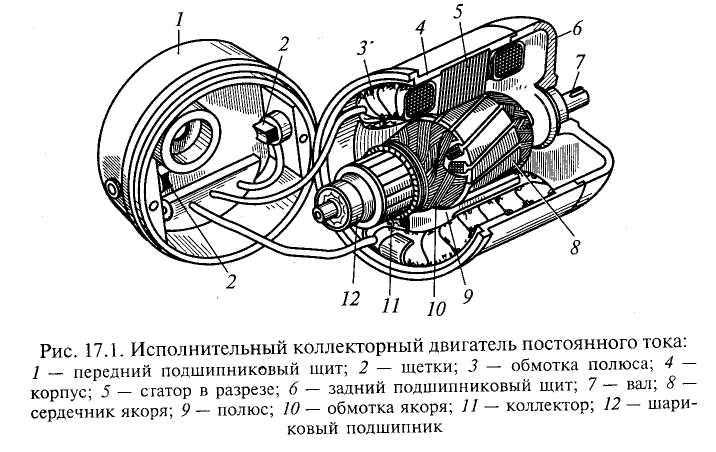 Наши клиенты уверены в надежности и эффективности предлагаемой продукции.
Наши клиенты уверены в надежности и эффективности предлагаемой продукции.
Мы проектируем и производим
Склад и быстрая доставка по всему миру
Особые отношения с OEM
НОВОСТИ КОМПАНИИ
01 2022
Выставка в Нюрнберге
Мы рады сообщить, что Smart Motor Devices OU примет участие в международной выставке Smart Production Solutions (SPS) для промышленных предприятий.
автоматизации в Нюрнберге, Германия, с 8 по 10 ноября 2022 г.! Ждем вас на нашем стенде (зал 4/126)!
Сентябрь 2022
11 2021
Драйверы шаговых двигателей с открытой рамой и держателем
Новая линейка продуктов — бескорпусные драйверы шаговых двигателей (версии с открытой рамой) и драйверы в открытом корпусе с зажимом DIN (версия с держателем). Драйверы выпускаются в четырех модификациях — с максимальным фазным током 1,6А, 2,8А и 4,2А и 8,0А
август 2022
06 2021
BLSD-20Modbus
Обновлено ПО контроллеров BLDC. Мы добавили математические и логические операции, увеличили количество вспомогательных регистров. Также теперь можно
Мы добавили математические и логические операции, увеличили количество вспомогательных регистров. Также теперь можно
работать с 32-битными данными. Еще одно улучшение — четырехквадрантное управление скоростью — теперь направление нагрузки не влияет на стабилизацию скорости двигателя.
Май 2022
Читать далее
СВЯЖИТЕСЬ С НАМИ
Как работает двигатель постоянного тока?
Электродвигатели постоянного тока сочетают в себе уникальные характеристики производительности и простоту управления, что делает их труднопревзойденными для приложений с регулируемой скоростью. В то время как двигатели переменного тока и средства управления в последнее время развились до такой степени, что стали конкурировать со многими их сильными сторонами, электродвигатели постоянного тока по-прежнему преобладают во многих отраслях, особенно когда требуется компактный, эффективный и быстродействующий двигатель.
Эта статья представляет собой руководство по основам электродвигателей постоянного тока, предоставляя вам информацию, необходимую для самостоятельного решения, подходят ли они для вашего применения.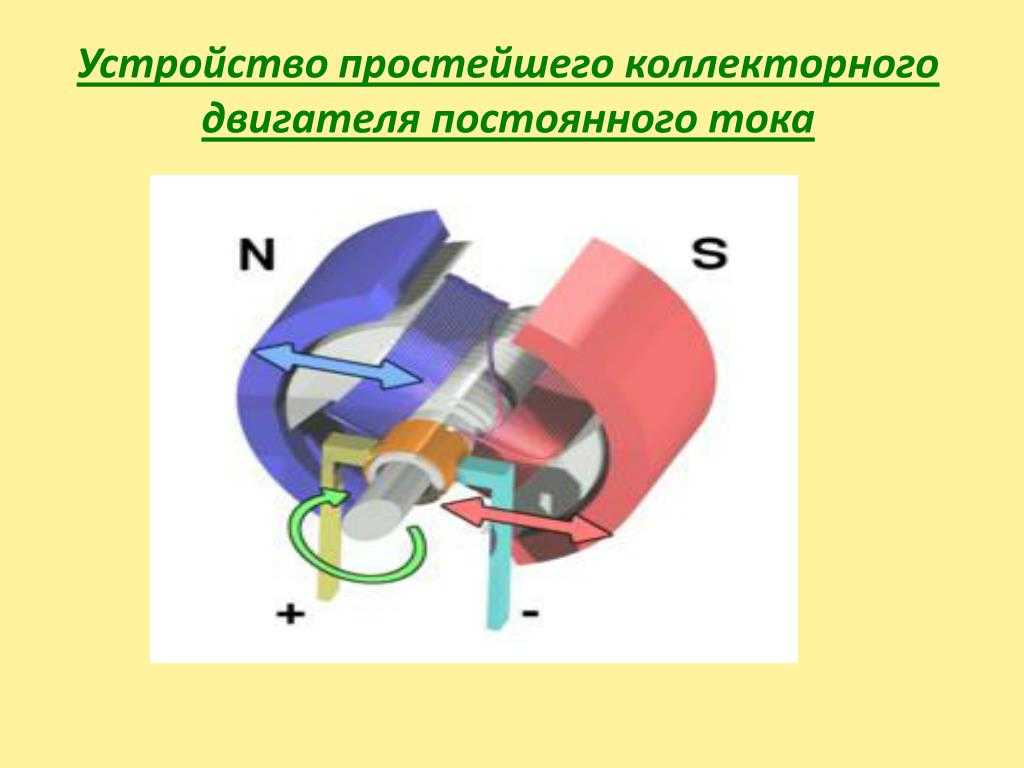
Принципы работы двигателя постоянного тока
Основной принцип работы электродвигателей заключается в том, что провод, по которому течет электрический ток, испытывает физическую силу при прохождении через магнитное поле. Это магнитное поле обычно создается в неподвижной части двигателя (статоре). Он оказывает усилие на проволочные обмотки, прикрепленные к вращающейся части двигателя (якорю), которая прикреплена к выходному валу.
При переключении направления магнитной силы в зависимости от положения ротора якорь ротора попеременно тянется в одном направлении, а затем толкается в противоположном направлении, создавая непрерывное вращательное движение. Этот процесс называется коммутацией.
Критическое различие между двигателями постоянного и переменного тока заключается в том, что для работы двигателя постоянного тока требуется особое коллекторное устройство. Напротив, двигатель переменного тока использует переменный ток входной мощности для управления эффектом переключения.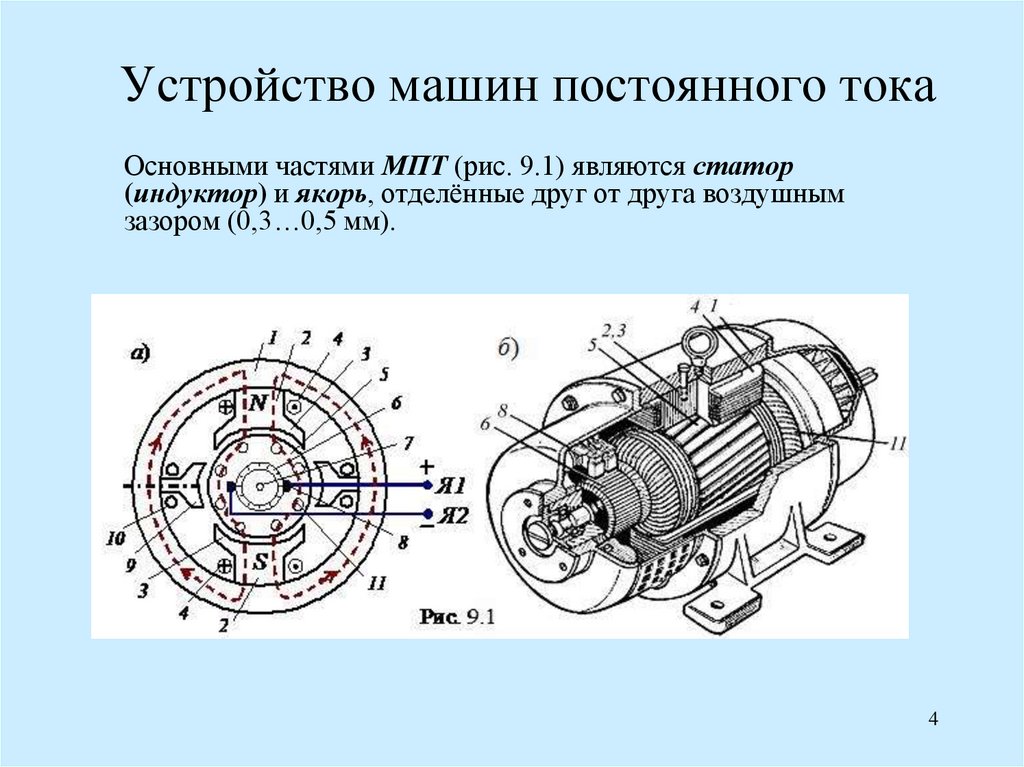
В щеточном двигателе постоянного тока коллектор имеет проводящую щетку, которая давит на ротор и контактирует с различными частями якоря в зависимости от положения ротора, эффективно используя ротор в качестве переключателя для изменения направления электромагнитного поля. Вместо этого в бесщеточном двигателе постоянного тока используется электронный датчик, обычно датчик Холла, для определения положения ротора и управления коммутацией, что устраняет необходимость в электрическом контакте с ротором.
Типы двигателей постоянного тока
Несмотря на то, что существует множество вариантов двигателей постоянного тока, есть две ключевые категории, каждая из которых имеет несколько различных типов двигателей.
Двигатели постоянного тока с постоянными магнитами
В двигателе постоянного тока с постоянными магнитами используются магниты либо в якоре, либо в статоре. Эти двигатели могут быть бесщеточными или щеточными.
Бесщеточные двигатели постоянного тока
Если на роторе установлены постоянные магниты, для создания магнитного поля не требуется пропускать электричество через щетки, и такая конфигурация известна как бесщеточный двигатель. Из-за отсутствия трения и износа щеток бесщеточные двигатели постоянного тока обеспечивают исключительный срок службы, производительность, тихую работу и эффективность (около 90%), что делает их идеальными для приложений, чувствительных к шуму и энергии, таких как HVAC, робототехника и устройства с батарейным питанием. Бесщеточный двигатель постоянного тока определенного типа, известный как шаговый двигатель, может вращаться ступенчато и применять удерживающий крутящий момент, что делает его полезным для робототехники и сервоуправления.
Использование постоянных магнитов ограничивает бесщеточные двигатели постоянного тока относительно небольшими приложениями. Поскольку для коммутации им требуется электронный датчик, они значительно дороже, чем коллекторные двигатели сопоставимого размера, но экономия энергии может быстро окупить эту разницу.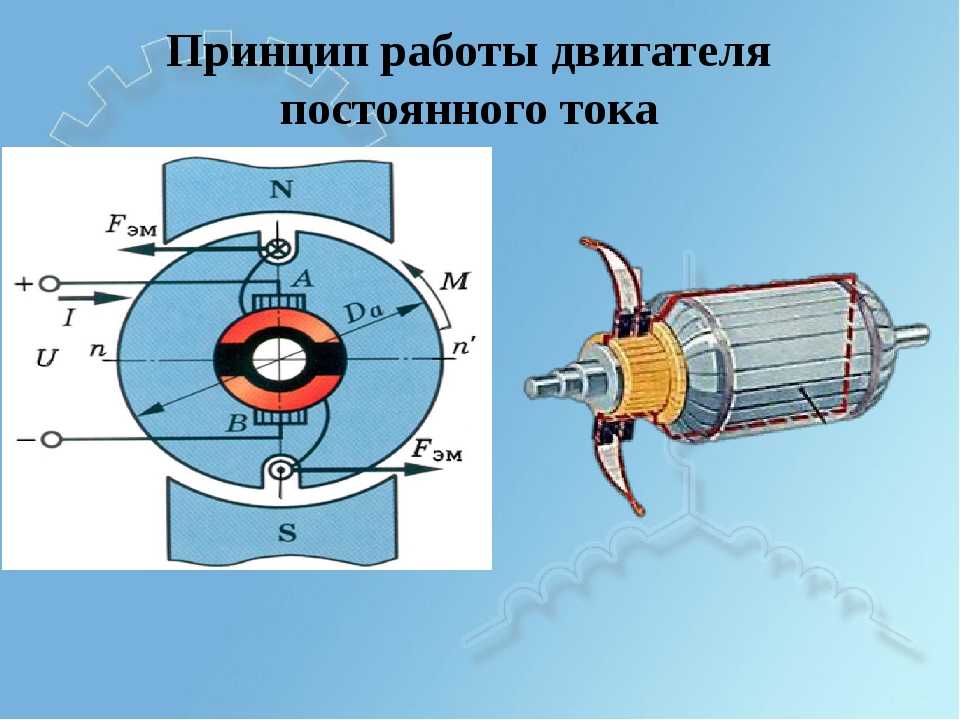
Коллекторные двигатели постоянного тока с постоянными магнитами
Когда в статоре используются постоянные магниты, электричество должно поступать на обмотки ротора, чтобы привести его в действие, и для этого предназначены щетки. Поскольку точки контакта щеток на роторе построены таким образом, что они попеременно переключают направление магнитного поля ротора, нет необходимости в электронной коммутации. Это снижает стоимость щеточных двигателей постоянного тока, но щетки снижают эффективность примерно до 75%. Износ щеток также создает необходимость их периодической замены и снижает надежность двигателя.
Коллекторные двигатели постоянного тока с постоянными магнитами используются в небольших и недорогих устройствах, таких как бытовая электроника и бытовая техника.
Двигатели постоянного тока с обмоткой возбуждения
Двигатели постоянного тока с обмоткой возбуждения используют электромагниты как на якоре ротора, так и на обмотках возбуждения статора без каких-либо постоянных магнитов, что делает их экономически эффективными для крупных промышленных применений. В этих двигателях используются коммутационные щетки, требующие периодической замены. Существует три основных типа двигателей с обмоткой возбуждения.
В этих двигателях используются коммутационные щетки, требующие периодической замены. Существует три основных типа двигателей с обмоткой возбуждения.
Двигатели постоянного тока серии
Двигатели с последовательным возбуждением имеют обмотки якоря и статора, соединенные последовательно, что означает, что полный ток проходит на якорь. Это обеспечивает гораздо большую скорость и крутящий момент, но затрудняет достижение контроля скорости, поскольку скорость изменяется пропорционально нагрузке. Двигатели с последовательным возбуждением обычно используются в приложениях, требующих высокого пускового момента и мощности без требования точного управления скоростью, например, в стартерах и электроинструментах.
Шунтирующие двигатели постоянного тока
Шунтирующие двигатели постоянного тока имеют параллельную обмотку якоря и обмотки возбуждения, что позволяет питать их независимо друг от друга. Это делает управление скоростью относительно простым и дает им уникальную возможность поддерживать постоянную скорость, в основном, независимо от изменений нагрузки. Компромисс заключается в том, что ток распределяется между обмотками якоря и обмотками возбуждения, что приводит к меньшему крутящему моменту, чем у двигателей постоянного тока с последовательной обмоткой. Шунтирующие двигатели постоянного тока обычно используются в приложениях, требующих постоянной или регулируемой скорости, таких как смесители, насосы, конвейеры и подъемники.
Компромисс заключается в том, что ток распределяется между обмотками якоря и обмотками возбуждения, что приводит к меньшему крутящему моменту, чем у двигателей постоянного тока с последовательной обмоткой. Шунтирующие двигатели постоянного тока обычно используются в приложениях, требующих постоянной или регулируемой скорости, таких как смесители, насосы, конвейеры и подъемники.
Составные двигатели постоянного тока
Составные двигатели представляют собой компромисс между последовательными и шунтирующими двигателями постоянного тока с обоими типами обмотки в одном корпусе. Это делает их лучшими из обоих миров, если вам требуется как высокий крутящий момент, так и разумное управление скоростью.
Управление двигателем постоянного тока
Для большинства двигателей постоянного тока управление скоростью относительно простое по сравнению с двигателями переменного тока. Поскольку скорость двигателя пропорциональна напряжению в обмотках двигателя, технически все, что вам нужно, это простая схема регулировки напряжения ШИМ.
Хотя этой схемы может быть достаточно для некоторых приложений, она не может адаптироваться к изменениям скорости, вызванным колебаниями нагрузки. Подходящий регулятор скорости будет отслеживать фактическую скорость двигателя, повышая или понижая напряжение для поддержания желаемой скорости.
Также легко изменить направление вращения двигателя постоянного тока, поменяв полярность напряжения на клеммах двигателя. Для этого обычно используется простая схема H-моста без использования механических переключателей.
Регуляторы скорости постоянного тока не требуют настройки, а их простота и низкая стоимость делают двигатели постоянного тока отличным выбором для многих типов приложений с переменной скоростью.
Выбор двигателя постоянного тока
Процесс выбора двигателя постоянного тока подобен любому другому электродвигателю. Хотя вам необходимо учитывать множество различных переменных, начните с определения того, существуют ли какие-либо ограничения по физическим размерам, где будет размещаться двигатель, особенно в портативных устройствах и бытовой технике. Затем определите доступное напряжение, а также скорость и крутящий момент, необходимые для вашего приложения. Сравните эту информацию с имеющимися у вас вариантами.
Затем определите доступное напряжение, а также скорость и крутящий момент, необходимые для вашего приложения. Сравните эту информацию с имеющимися у вас вариантами.
Для небольших применений бесщеточные двигатели обеспечивают выдающуюся эффективность в компактном и прочном корпусе, а щеточные двигатели с постоянными магнитами более экономичны. В последнее время повышенное внимание к энергоэффективности привело к снижению стоимости бесщеточных двигателей, и они являются отличным выбором практически для любых небольших установок.
Более крупные промышленные двигатели, скорее всего, будут двигателями с обмоткой возбуждения, поскольку они не требуют использования дорогих постоянных магнитов. Если вы отдаете предпочтение высокому пусковому крутящему моменту и не нуждаетесь в точном управлении скоростью двигателя, идеально подойдет серийный двигатель постоянного тока. Если вам требуется, чтобы скорость была постоянной и контролируемой, лучшим выбором будут шунтирующие двигатели постоянного тока.
Резюме
Теперь, когда вы понимаете основы двигателей постоянного тока, вы сможете определить, какой тип лучше всего соответствует вашим требованиям. Мы предлагаем широкий выбор двигателей постоянного тока и средств управления, поэтому вы можете создать привод электродвигателя, обеспечивающий требуемую производительность.
Есть вопросы? Свяжитесь с нашими экспертами.
Свяжитесь с нашей командой экспертов по электронной почте или телефону.
1-800-890-7593
[email protected]
Двигатели постоянного тока – преимущества и опасности при эксплуатации
Преимущества и опасности при эксплуатации двигателей постоянного тока
Магазин двигателей постоянного тока
Двигатель постоянного тока преобразует электрическую энергию в механическую. В двигателе постоянного тока используется постоянный ток, другими словами, ток течет в одном направлении.
Двигатель постоянного тока обычно состоит из: сердечника якоря, воздушного зазора, полюсов и ярма, образующих магнитную цепь; обмотка якоря, обмотка возбуждения, щетки и коммутатор, образующие электрическую цепь; и рама, концевые колокола, подшипники, опоры щеток и вал, которые обеспечивают механическую поддержку. См. вырез двигателя постоянного тока в нижней части этой страницы ресурсов.
Преимущества двигателей постоянного тока
У двигателей постоянного тока есть два основных преимущества: Изменение скорости и Крутящий момент .
Изменение скорости
Изменение скорости достигается изменением либо напряжения якоря, либо напряжения возбуждения, либо их комбинации. Например, двигатель с
базовая скорость 1750 об/мин и напряжение якоря 500 В постоянного тока будут работать при 875 об/мин при снижении напряжения якоря на 50% (до 250 В постоянного тока).- Управление напряжением якоря — Для этого типа управления скоростью напряжение якоря изменяется при поддержании постоянного возбуждения шунтирующего поля. Выходной крутящий момент двигателя постоянного тока пропорционален произведению потока главного полюса, тока якоря и постоянной машины, которая является функцией обмоток якоря. Следовательно, при управлении скоростью вращения якоря и постоянном возбуждении шунтирующего поля момент зависит только от тока якоря. Другими словами, при номинальном токе якоря крутящий момент постоянен.
Двигатель постоянного тока, работающий с регулированием напряжения якоря и возбуждением постоянным полем, будет развивать номинальный крутящий момент при номинальном токе якоря независимо от скорости. Обычно это называется работой с постоянным крутящим моментом.
- Управление шунтирующим полем — При регулировании скорости за счет ослабления поля напряжение, подаваемое на шунтирующее поле, регулируется реостатом с переменным сопротивлением, включенным последовательно с цепью шунтирующего поля, или путем изменения напряжения источника питания шунтирующего поля.
Уменьшение напряжения шунтирующего поля уменьшает ток возбуждения, что, в свою очередь, уменьшает поток возбуждения, позволяя увеличить скорость двигателя.
Нельзя использовать увеличение напряжения возбуждения для получения скорости ниже базовой, так как возбуждение будет перегреваться при токе выше номинального. Двигатели постоянного тока, работающие при постоянном напряжении якоря и с ослаблением поля, имеют постоянную мощность в лошадиных силах во всем диапазоне скоростей. Значения скорости управления полем находятся в диапазоне от 1:1 до 6:1. - Комбинация управления напряжением якоря и шунтирующим полем — Использование обоих методов управления скоростью дает широкий диапазон скоростей. Управление напряжением якоря используется для скоростей ниже базовой скорости, что обеспечивает постоянный крутящий момент. Управление шунтирующим полем используется для получения скоростей выше базовых, что обеспечивает постоянную мощность.
- Управление напряжением якоря — Для этого типа управления скоростью напряжение якоря изменяется при поддержании постоянного возбуждения шунтирующего поля.
Момент затяжки
Определение электродвигателя — это устройство, которое преобразует электрическую энергию в механическую энергию. На самом деле двигатель можно было бы лучше определить как «генератор крутящего момента».
Крутящий момент можно определить как вращающую силу, которая стремится произвести вращение на валу. Основное преимущество двигателя постоянного тока заключается в том, что он может развивать постоянный крутящий момент в широком диапазоне скоростей.Источник питания является важным фактором при применении двигателей постоянного тока. Наиболее распространенным способом подачи постоянного напряжения на двигатель от сети переменного тока является использование электронного привода. В зависимости от конструкции привод обеспечивает форму импульса, подобную идеальному напряжению батареи. Эти импульсы характеризуются форм-фактором, который определяется NEMA (Национальной ассоциацией производителей электрооборудования) как код источника питания. Коды основаны на качестве выходной мощности. Вопросы применения включают стоимость привода, эксплуатационные расходы (эффективность), надежность и качество выходной мощности.
- Код питания Nema A — этот источник питания представляет собой источник постоянного тока, такой как батарея или генератор. Высокочастотные источники питания с ШИМ будут соответствовать коду мощности NEMA A. Все двигатели постоянного тока с рейтингом NEMA могут работать от этого типа источника питания без использования внешних реакторов.
- Nema Power Code C — этот источник питания близок к чистому и состоит из шести кремниевых управляемых выпрямителей (SCRS), соединенных по трехфазной двухполупериодной мостовой схеме. Все двигатели постоянного тока с рейтингом NEMA могут работать от этого типа источника питания без использования внешних реакторов.
- Nema, код мощности D — мощность, код D, содержит немного больше искажений, чем код C, и состоит из трех SCRS и трех диодных выпрямителей, соединенных по трехфазной двухполупериодной мостовой схеме. На клеммах якоря используется выпрямитель свободного хода. Двигатели мощностью 250 л.с. или менее могут работать от этого типа питания без использования внешних дросселей. Двигатели мощностью 300 л.с. и выше могут потребовать использования внешних дросселей при работе от этого типа источника питания.
- Nema Power Code E — Этот источник питания имеет среднее качество и состоит из трех управляемых выпрямителей (SCRS), соединенных по трехфазной полуволновой мостовой схеме. Для большинства двигателей постоянного тока потребуется некоторое снижение номинальных характеристик или использование внешнего дросселя при использовании с этим типом источника питания. Проконсультируйтесь с заводом-изготовителем, когда используется этот тип источника питания.
- Nema Power Code K — этот источник питания имеет ограниченное применение и состоит из двух управляемых выпрямителей (SCR) и двух диодных выпрямителей, соединенных в однофазную двухполупериодную мостовую конфигурацию. На клеммах якоря двигателя можно использовать выпрямитель свободного хода. Этот тип источника питания обычно используется для двигателей мощностью до 7-1/2 л.с.
- Код питания Nema A — этот источник питания представляет собой источник постоянного тока, такой как батарея или генератор.
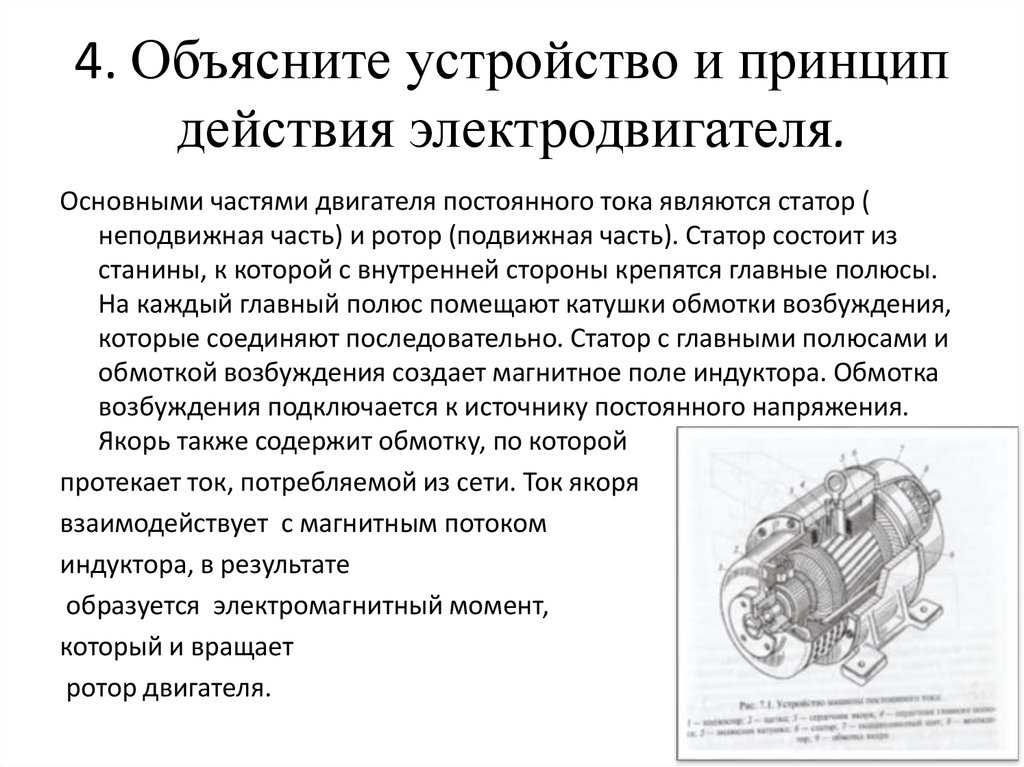 Выходной крутящий момент двигателя постоянного тока пропорционален произведению потока главного полюса, тока якоря и постоянной машины, которая является функцией обмоток якоря. Следовательно, при управлении скоростью вращения якоря и постоянном возбуждении шунтирующего поля момент зависит только от тока якоря. Другими словами, при номинальном токе якоря крутящий момент постоянен.
Выходной крутящий момент двигателя постоянного тока пропорционален произведению потока главного полюса, тока якоря и постоянной машины, которая является функцией обмоток якоря. Следовательно, при управлении скоростью вращения якоря и постоянном возбуждении шунтирующего поля момент зависит только от тока якоря. Другими словами, при номинальном токе якоря крутящий момент постоянен. Нельзя использовать увеличение напряжения возбуждения для получения скорости ниже базовой, так как возбуждение будет перегреваться при токе выше номинального. Двигатели постоянного тока, работающие при постоянном напряжении якоря и с ослаблением поля, имеют постоянную мощность в лошадиных силах во всем диапазоне скоростей. Значения скорости управления полем находятся в диапазоне от 1:1 до 6:1.
Нельзя использовать увеличение напряжения возбуждения для получения скорости ниже базовой, так как возбуждение будет перегреваться при токе выше номинального. Двигатели постоянного тока, работающие при постоянном напряжении якоря и с ослаблением поля, имеют постоянную мощность в лошадиных силах во всем диапазоне скоростей. Значения скорости управления полем находятся в диапазоне от 1:1 до 6:1. Крутящий момент можно определить как вращающую силу, которая стремится произвести вращение на валу. Основное преимущество двигателя постоянного тока заключается в том, что он может развивать постоянный крутящий момент в широком диапазоне скоростей.
Крутящий момент можно определить как вращающую силу, которая стремится произвести вращение на валу. Основное преимущество двигателя постоянного тока заключается в том, что он может развивать постоянный крутящий момент в широком диапазоне скоростей.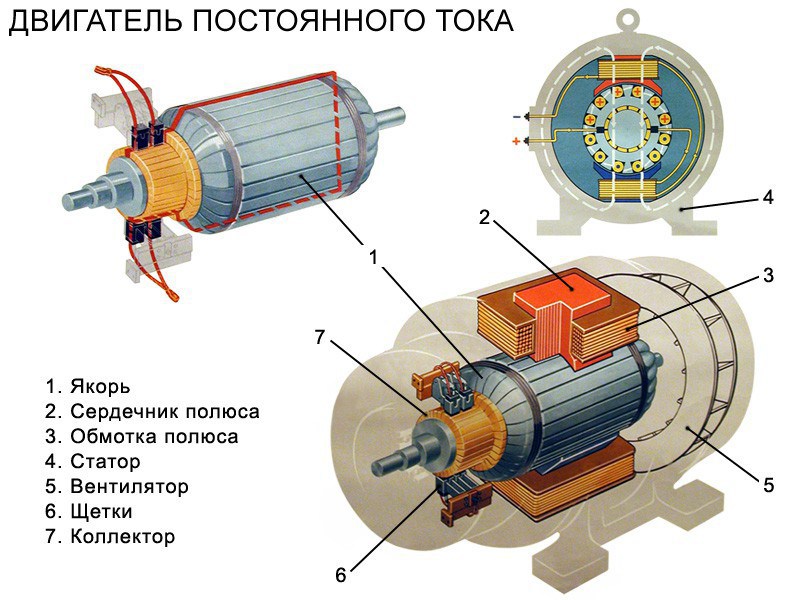 Высокочастотные источники питания с ШИМ будут соответствовать коду мощности NEMA A. Все двигатели постоянного тока с рейтингом NEMA могут работать от этого типа источника питания без использования внешних реакторов.
Высокочастотные источники питания с ШИМ будут соответствовать коду мощности NEMA A. Все двигатели постоянного тока с рейтингом NEMA могут работать от этого типа источника питания без использования внешних реакторов.
Типы двигателей постоянного тока
В промышленности обычно используются двигатели постоянного тока четырех типов: параллельные, последовательные, со смешанной обмоткой или со стабилизированным шунтом и с постоянными магнитами.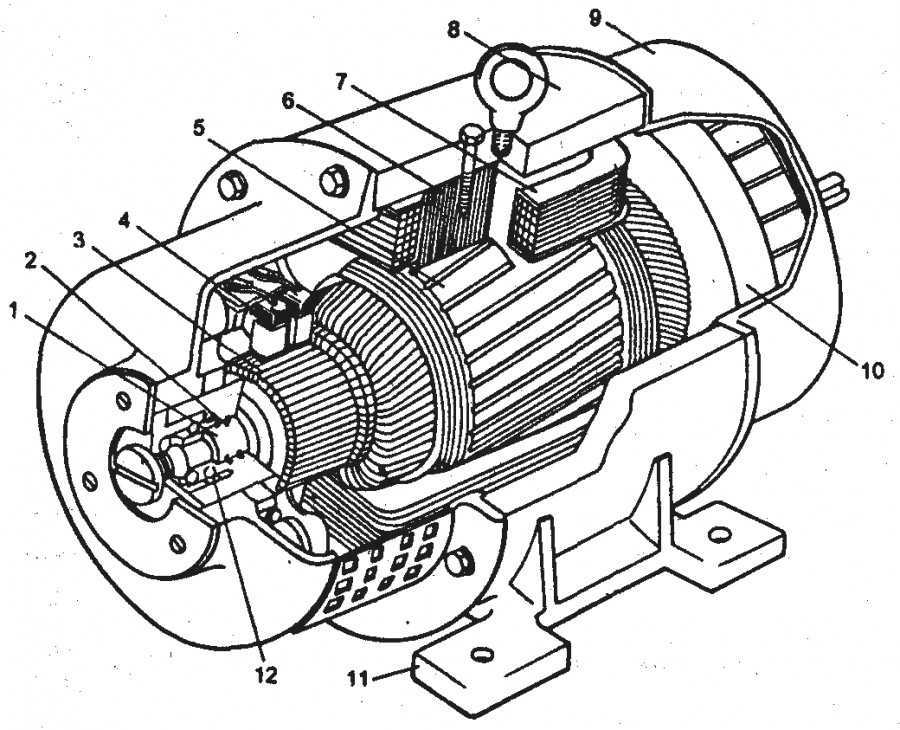 При выборе двигателя постоянного тока для данного применения необходимо учитывать два фактора: 1) Допустимое изменение скорости при заданном изменении нагрузки. 2) Допустимое изменение крутящего момента при заданном изменении нагрузки.
При выборе двигателя постоянного тока для данного применения необходимо учитывать два фактора: 1) Допустимое изменение скорости при заданном изменении нагрузки. 2) Допустимое изменение крутящего момента при заданном изменении нагрузки.
- Шунтирующие двигатели — Шунтирующий двигатель имеет якорь и возбуждение параллельно или может иметь отдельные источники питания возбуждения и якоря. В любом случае этот тип двигателя имеет хорошую регулировку скорости (от 5% до 10%) и способен развивать 300% крутящего момента при полной нагрузке в течение очень короткого периода времени.
- Двигатель серии — Как следует из названия, у серийного двигателя постоянного тока якорь и возбуждение соединены в последовательную цепь. Этот тип двигателя используется там, где нагрузка требует высокого пускового момента, например, в локомотивах, кранах или буровых установках. Пусковой крутящий момент, развиваемый серийным двигателем, может достигать 500 % от номинального крутящего момента при полной нагрузке. Серийный двигатель способен обеспечить такой высокий пусковой момент благодаря тому, что его поле работает ниже насыщения. Следовательно, увеличение нагрузки приведет к увеличению как тока якоря, так и тока возбуждения. В результате поток якоря и поток поля увеличиваются вместе. Поскольку крутящий момент, развиваемый в двигателе постоянного тока, зависит от взаимодействия якоря и потоков поля, крутящий момент увеличивается на квадрат значения увеличения тока. Следовательно, последовательный двигатель будет давать большее увеличение крутящего момента, чем параллельный двигатель, при заданном увеличении тока. Регулировка скорости последовательного двигателя по своей природе хуже, чем у параллельного двигателя. Если нагрузка на двигатель уменьшается, ток, протекающий как в цепи якоря, так и в цепях возбуждения, уменьшается, что приводит к уменьшению их плотности потока. Это приводит к большему увеличению скорости, чем было бы реализовано в шунтирующем двигателе. Если бы механическая нагрузка была снята с двигателя полностью, скорость неограниченно возрастала бы до тех пор, пока центробежные силы, создаваемые якорем, не разрушили бы двигатель. По этой причине последовательные двигатели постоянного тока всегда должны быть подключены к нагрузке.
- Двигатели с комбинированной обмоткой — Эти двигатели используются всякий раз, когда необходимо получить характеристику регулирования скорости, недостижимую ни для последовательного, ни для параллельного двигателя. Этот тип двигателя обеспечивает довольно высокий пусковой момент и обеспечивает постоянную скорость под нагрузкой. Эта характеристика достигается включением части цепи возбуждения последовательно с цепью якоря. Эту конфигурацию не следует путать с промежуточными полюсами, которые содержат только несколько
витки провода с целью нейтрализации реакции якоря. Когда приложена нагрузка, увеличивающийся ток через последовательную обмотку увеличивает магнитный поток, тем самым увеличивая выходной крутящий момент двигателя. В результате это увеличение потока поля приведет к большему снижению скорости при данном изменении нагрузки, чем шунтирующий двигатель. - Двигатели с постоянными магнитами — Двигатели с постоянными магнитами обычно используются там, где важным фактором является время отклика. Их скоростная характеристика аналогична двигателю с параллельным возбуждением. Они построены с обычным типом якоря, но имеют постоянные магниты в секции возбуждения, а не обмотки. Двигатели с постоянными магнитами считаются менее дорогими в эксплуатации, поскольку они не требуют внешнего питания. Однако они могут терять свой магнетизм с возрастом и в результате создавать крутящий момент ниже номинального. Некоторые двигатели с постоянными магнитами имеют обмотки, встроенные в магниты возбуждения для повторного намагничивания.
 Серийный двигатель способен обеспечить такой высокий пусковой момент благодаря тому, что его поле работает ниже насыщения. Следовательно, увеличение нагрузки приведет к увеличению как тока якоря, так и тока возбуждения. В результате поток якоря и поток поля увеличиваются вместе. Поскольку крутящий момент, развиваемый в двигателе постоянного тока, зависит от взаимодействия якоря и потоков поля, крутящий момент увеличивается на квадрат значения увеличения тока. Следовательно, последовательный двигатель будет давать большее увеличение крутящего момента, чем параллельный двигатель, при заданном увеличении тока. Регулировка скорости последовательного двигателя по своей природе хуже, чем у параллельного двигателя. Если нагрузка на двигатель уменьшается, ток, протекающий как в цепи якоря, так и в цепях возбуждения, уменьшается, что приводит к уменьшению их плотности потока. Это приводит к большему увеличению скорости, чем было бы реализовано в шунтирующем двигателе. Если бы механическая нагрузка была снята с двигателя полностью, скорость неограниченно возрастала бы до тех пор, пока центробежные силы, создаваемые якорем, не разрушили бы двигатель.
Серийный двигатель способен обеспечить такой высокий пусковой момент благодаря тому, что его поле работает ниже насыщения. Следовательно, увеличение нагрузки приведет к увеличению как тока якоря, так и тока возбуждения. В результате поток якоря и поток поля увеличиваются вместе. Поскольку крутящий момент, развиваемый в двигателе постоянного тока, зависит от взаимодействия якоря и потоков поля, крутящий момент увеличивается на квадрат значения увеличения тока. Следовательно, последовательный двигатель будет давать большее увеличение крутящего момента, чем параллельный двигатель, при заданном увеличении тока. Регулировка скорости последовательного двигателя по своей природе хуже, чем у параллельного двигателя. Если нагрузка на двигатель уменьшается, ток, протекающий как в цепи якоря, так и в цепях возбуждения, уменьшается, что приводит к уменьшению их плотности потока. Это приводит к большему увеличению скорости, чем было бы реализовано в шунтирующем двигателе. Если бы механическая нагрузка была снята с двигателя полностью, скорость неограниченно возрастала бы до тех пор, пока центробежные силы, создаваемые якорем, не разрушили бы двигатель.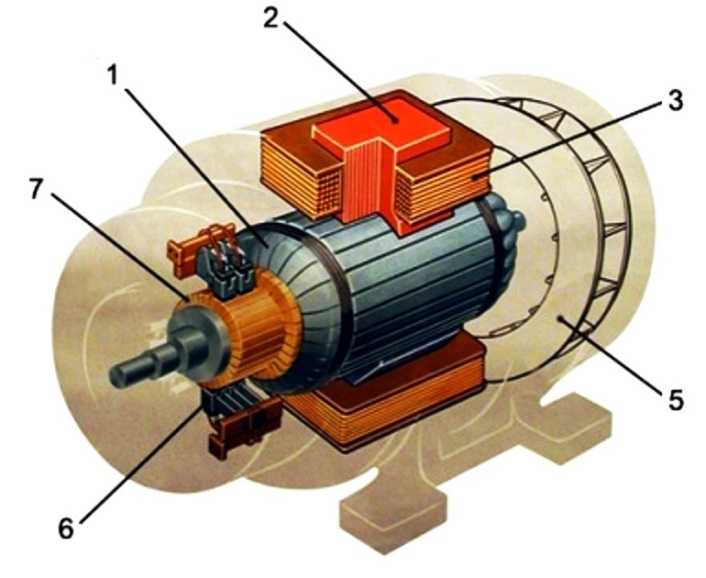 По этой причине последовательные двигатели постоянного тока всегда должны быть подключены к нагрузке.
По этой причине последовательные двигатели постоянного тока всегда должны быть подключены к нагрузке. Их скоростная характеристика аналогична двигателю с параллельным возбуждением. Они построены с обычным типом якоря, но имеют постоянные магниты в секции возбуждения, а не обмотки. Двигатели с постоянными магнитами считаются менее дорогими в эксплуатации, поскольку они не требуют внешнего питания. Однако они могут терять свой магнетизм с возрастом и в результате создавать крутящий момент ниже номинального. Некоторые двигатели с постоянными магнитами имеют обмотки, встроенные в магниты возбуждения для повторного намагничивания.
Их скоростная характеристика аналогична двигателю с параллельным возбуждением. Они построены с обычным типом якоря, но имеют постоянные магниты в секции возбуждения, а не обмотки. Двигатели с постоянными магнитами считаются менее дорогими в эксплуатации, поскольку они не требуют внешнего питания. Однако они могут терять свой магнетизм с возрастом и в результате создавать крутящий момент ниже номинального. Некоторые двигатели с постоянными магнитами имеют обмотки, встроенные в магниты возбуждения для повторного намагничивания.Опасные условия для двигателей постоянного тока
Открытые неизолированные компоненты двигателей постоянного тока (коллектор, щеточная оснастка, болтовые соединения) уязвимы для раннего электрического отказа, когда корпус не соответствует требованиям, независимо от системы изоляции. Очень многие загрязняющие вещества, влажные или сухие, являются отличными проводниками, например, углерод, металлическая пыль и соли кислот.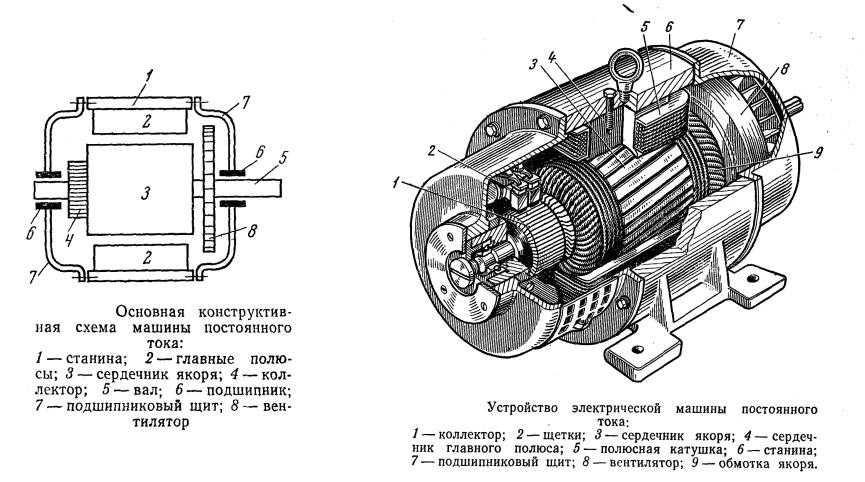 Точно так же все влажное проводит ток довольно хорошо даже при низком напряжении на расстоянии в несколько дюймов. Обычные масляные пары, присутствующие в большинстве атмосфер, постепенно оседают на всех поверхностях. На этих липких поверхностях затем накапливаются загрязнения, которые начинают просачиваться, замыкая или заземляя токи. Такой малый ток утечки может продолжаться годами, не приводя к фактическому отказу машины. При соблюдении определенных условий утечка становится чрезмерной, и машина может выйти из строя почти сразу.
Точно так же все влажное проводит ток довольно хорошо даже при низком напряжении на расстоянии в несколько дюймов. Обычные масляные пары, присутствующие в большинстве атмосфер, постепенно оседают на всех поверхностях. На этих липких поверхностях затем накапливаются загрязнения, которые начинают просачиваться, замыкая или заземляя токи. Такой малый ток утечки может продолжаться годами, не приводя к фактическому отказу машины. При соблюдении определенных условий утечка становится чрезмерной, и машина может выйти из строя почти сразу.
- Перегрев —
Перегрузка — это только одна из причин проблем с перегревом. Высокие температуры окружающей среды или неправильная очистка фильтров на самой машине способствуют сокращению срока службы за счет повышения рабочих температур. Это, в свою очередь, вызывает аномально высокое дифференциальное напряжение расширения, приводящее к трещинам в изоляции, которые обычно распространяются на оголенный проводник, открывая цепь из-за загрязнения. Кроме того, общеизвестным эффектом является более быстрая деградация изоляционных материалов, которые сжимаются и затвердевают, а затем постепенно теряют как прочность, так и изоляционные свойства.
характеристики. Температура окружающей среды выше 40 градусов по Цельсию также губительна для смазки, кабелей, щеток и коммутации. - Загрязнение — Непроводящие загрязняющие вещества, такие как фабричная пыль и песок, постепенно способствуют перегреву, ограничивая циркуляцию охлаждающего воздуха. Кроме того, они могут разрушить изоляцию и лак, что постепенно снижает их эффективность. Проводящие загрязняющие вещества, такие как металлическая пыль, карборунд, углерод и соль, не только способствуют перегреву, но и обеспечивают немедленную проводимость.
пути замыкания или заземления токов утечки везде, где есть контакт с электрической цепью. Нормальное дифференциальное расширение, вращательные напряжения и тепловое расширение захваченного воздуха в пустотах внутри системы изоляции в конечном итоге размыкают изолированную цепь в непредсказуемых местах. В зависимости от тяжести рабочего напряжения срок службы может измеряться годами, месяцами, днями или часами.Масляные отложения способствуют легкому прилипанию загрязняющих веществ к внутренним изолированным и открытым неизолированным поверхностям, что способствует возникновению проблем в начале срока службы. Вода от разбрызгивания или конденсации серьезно ухудшает изоляционную систему. Только вода проводит. Непроводящие загрязнения легко превращаются в проводники тока утечки. Прерывистая или случайная влажность в конечном итоге приводит к отказу в обслуживании из-за последовательных ситуаций утечки.
постепенно создайте постоянный путь для продолжения разрушительных токов короткого замыкания или заземления. - Вибрация —
Высокая вибрация усугубляет проблемы со сроком службы, подвергая вал нагрузке, что в конечном итоге приводит к фактическому короткому замыканию проводников между витками или между слоями. Кроме того, сильное напряжение вызывает трещины и трещины в изоляции проводника, что приводит к повреждению электрической цепи из-за загрязнения. Другим важным фактором является эффект наклепа, который эта вибрация оказывает на сам проводник, что приводит к разомкнутой цепи из-за проводимости или растрескивания. Проблемы с коммутацией могут возникнуть из-за подпрыгивания щеток. Продолжительная сильная вибрация утомляет металлы и может привести к выходу из строя
литье или подшипники. - Высота над уровнем моря — Стандартные характеристики двигателя основаны на работе на любой высоте до 3300 футов (1000 метров). Все высоты до 3300 футов включительно считаются такими же, как уровень моря. Снижение номинальных характеристик на большой высоте требуется из-за более низкой плотности воздуха, что требует большего охлаждения. Двигатели постоянного тока снижаются на 3% на каждые 1000 футов выше 3300 футов. В некоторых случаях для охлаждения двигателя будет достаточно вентилятора вместо использования большей рамы.
мотор. - Температура окружающей среды — Двигатели для использования в местах с аномально высокой температурой обычно рассчитаны на более высокую температуру окружающей среды за счет меньшего повышения температуры обмотки. Если температура окружающей среды выше 50 градусов C, необходимо также уделить особое внимание смазке. Несмотря на то, что можно работать при температуре окружающей среды выше 50 градусов C, следует обратиться к производителю, чтобы определить, какие шаги необходимо предпринять.
Как правило, самый простой способ снижения номинальных характеристик при высоких температурах окружающей среды — это снижение номинальной мощности и работа двигателя при ослаблении поля. Таким образом, и якорь, и поле будут работать при пониженном токе. При температуре окружающей среды ниже 40°C обычно используется стандартная машина с температурой 40°C при номинальной нагрузке. В случае, когда температура окружающей среды значительно ниже 40°C, при перегрузке может использоваться стандартный двигатель, работающий в условиях окружающей среды, при условии, что известны следующие факторы:- Известно, что температура окружающей среды всегда низкая.
- Напряжения вала, нагрузка на подшипники и коммутация одобрены заводом.
- Доступна и используется защита двигателя от перегрузки или заклинивания.
Эксплуатация двигателей при температуре окружающей среды ниже 0 градусов по Цельсию приводит к тяжелым нагрузкам на составные части машины. Особое внимание уделяется системе смазки и системе изоляции.
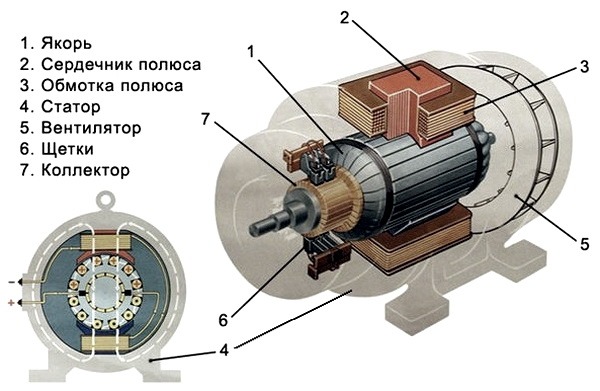 Кроме того, общеизвестным эффектом является более быстрая деградация изоляционных материалов, которые сжимаются и затвердевают, а затем постепенно теряют как прочность, так и изоляционные свойства.
Кроме того, общеизвестным эффектом является более быстрая деградация изоляционных материалов, которые сжимаются и затвердевают, а затем постепенно теряют как прочность, так и изоляционные свойства. В зависимости от тяжести рабочего напряжения срок службы может измеряться годами, месяцами, днями или часами.
В зависимости от тяжести рабочего напряжения срок службы может измеряться годами, месяцами, днями или часами.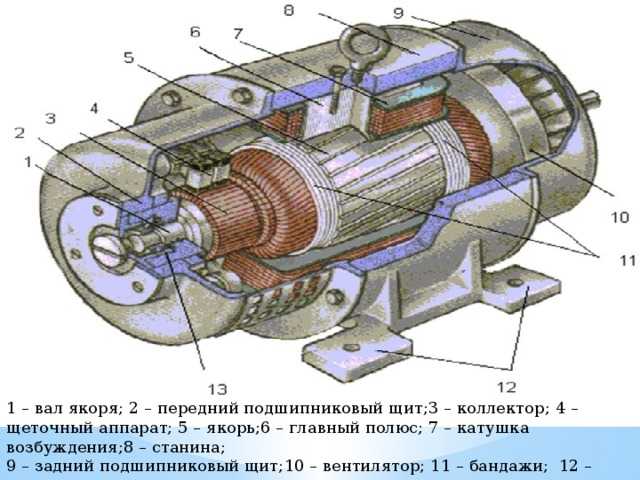 Другим важным фактором является эффект наклепа, который эта вибрация оказывает на сам проводник, что приводит к разомкнутой цепи из-за проводимости или растрескивания. Проблемы с коммутацией могут возникнуть из-за подпрыгивания щеток. Продолжительная сильная вибрация утомляет металлы и может привести к выходу из строя
Другим важным фактором является эффект наклепа, который эта вибрация оказывает на сам проводник, что приводит к разомкнутой цепи из-за проводимости или растрескивания. Проблемы с коммутацией могут возникнуть из-за подпрыгивания щеток. Продолжительная сильная вибрация утомляет металлы и может привести к выходу из строя Если температура окружающей среды выше 50 градусов C, необходимо также уделить особое внимание смазке. Несмотря на то, что можно работать при температуре окружающей среды выше 50 градусов C, следует обратиться к производителю, чтобы определить, какие шаги необходимо предпринять.
Если температура окружающей среды выше 50 градусов C, необходимо также уделить особое внимание смазке. Несмотря на то, что можно работать при температуре окружающей среды выше 50 градусов C, следует обратиться к производителю, чтобы определить, какие шаги необходимо предпринять.
(Back to DC Motors)
DC Motor 1/2HP 56C рама 90 В/1750 об/мин. Товар также покупался
Описание Спецификация Вопросы и ответы Отзывы
Коллекторный двигатель постоянного тока 1/2 л.с., 90 В, 56C, 1750 об/мин, TENV
Предлагаемый нами двигатель постоянного тока мощностью 1/2 л. скорость. Благодаря съемному основанию и прочному стильному синему корпусу, высокой эффективности и длительному сроку службы вы можете быть уверены в покупке.
Tough Equipment & Tools, Pay Less
VEVOR — ведущий бренд, специализирующийся на оборудовании и инструментах. Наряду с тысячами мотивированных сотрудников VEVOR стремится предоставлять нашим клиентам прочное оборудование и инструменты по невероятно низким ценам. Сегодня VEVOR оккупировал рынки более чем 200 стран с более чем 10 миллионами членов по всему миру.
Сегодня VEVOR оккупировал рынки более чем 200 стран с более чем 10 миллионами членов по всему миру.
Почему выбирают ВЕВОР?
- Высокое качество
- Невероятно низкие цены
- Быстрая и безопасная доставка
- Бесплатный возврат в течение 30 дней
- Внимательное обслуживание 24/7
Прочное оборудование и инструменты, платите меньше
VEVOR — ведущий бренд, специализирующийся на оборудовании и инструментах. Наряду с тысячами мотивированных сотрудников VEVOR стремится предоставлять нашим клиентам прочное оборудование и инструменты по невероятно низким ценам. Сегодня VEVOR оккупировал рынки более чем 200 стран с более чем 10 миллионами членов по всему миру.
Почему выбирают ВЕВОР?
- Прочное качество премиум-класса
- Невероятно низкие цены
- Быстрая и безопасная доставка
- 30-дневный бесплатный возврат
- Внимательное обслуживание 24/7
Коллекторный двигатель постоянного тока
Со встроенным вентилятором охлаждения, ТЭНВ (полностью закрытый) двигатель может лучше рассеивать тепло, чтобы предотвратить повреждение от перегрева.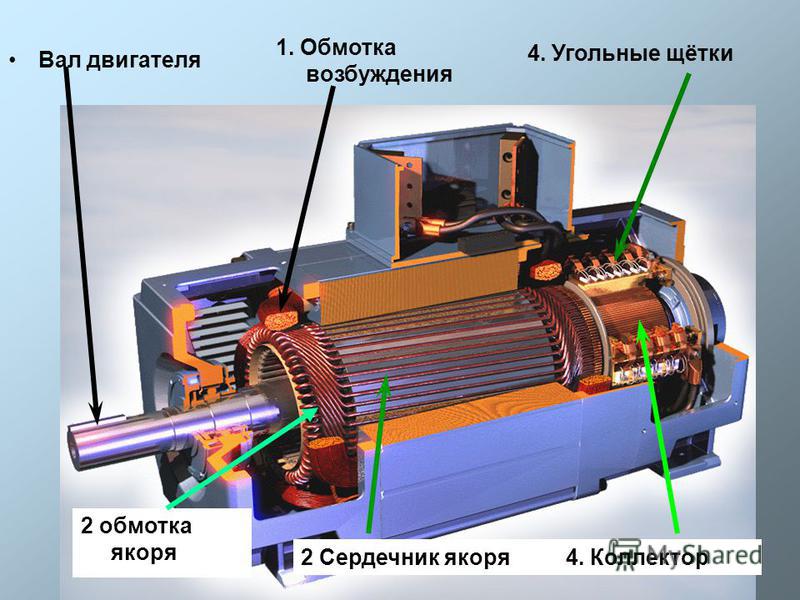 Номинальная скорость: 1750 об/мин, л.с.: 1/2.
Номинальная скорость: 1750 об/мин, л.с.: 1/2.
Durable Прочный корпус
Внешний корпус из высококачественной стали, класс изоляции F, прочный и прочный. Шариковые подшипники с двойным уплотнением и постоянной консистентной смазкой для длительного срока службы.
Со съемным основанием
Наш двигатель постоянного тока tenv имеет съемное основание и раму 56C для универсальности двойного монтажа. Легко монтируется и снимается.
Полностью закрытый без вентиляции
Двигатель представляет собой коллекторный двигатель постоянного тока TENV (полностью закрытый без вентиляции). Встроенный вентилятор охлаждает без повышения температуры. Торцевая пластина из алюминиевого сплава для предотвращения коррозии.
Угольные щетки в комплекте
Одна пара запасных угольных щеток. Угольная щетка является расходным материалом и должна регулярно заменяться. Класс изоляции: F, коэффициент эксплуатации: 1,10.
Широкое применение
Коллекторные двигатели постоянного тока стали доминировать во многих областях применения.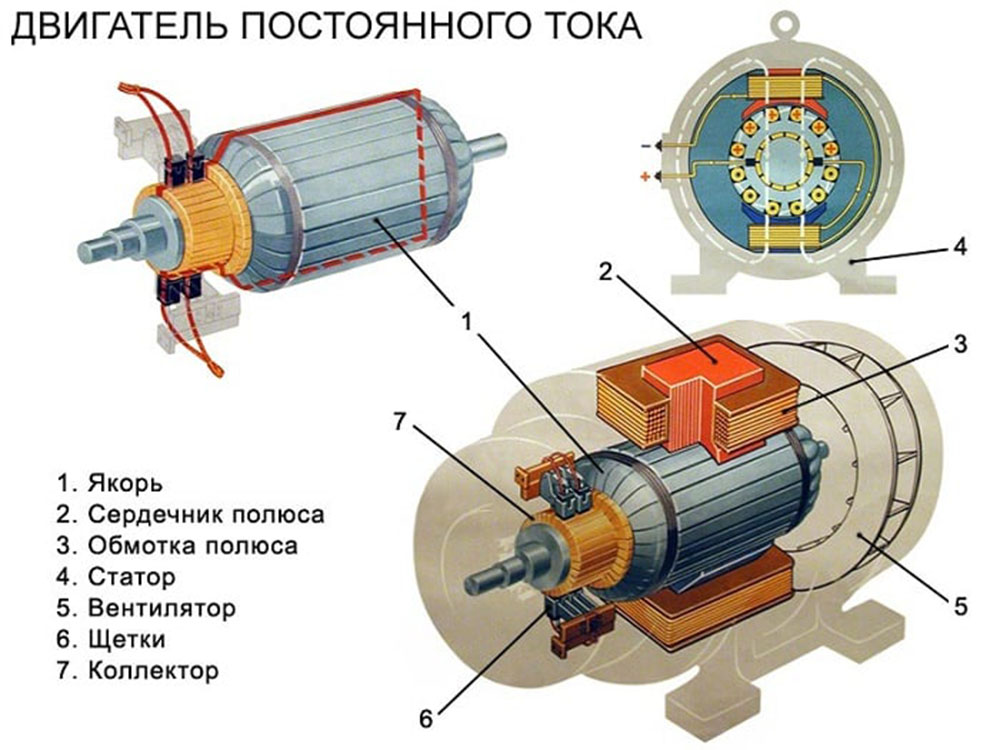 Наши двигатели постоянного тока обычно используются в таком оборудовании, как устройство для снятия проволоки, пресс-подборщик, резак для бумаги и т. д.
Наши двигатели постоянного тока обычно используются в таком оборудовании, как устройство для снятия проволоки, пресс-подборщик, резак для бумаги и т. д.
Технические характеристики
Номинальное напряжение: 90 В HP
Номинальная скорость: 1750 об/мин
Скорость холостого хода: 1930 об/мин
Номинальный крутящий момент: 2,05 Нм
Enclosure: TENV
Frame: 56C
Service Factor: 1.10
Package Content
1 x 1/2HP DC Motor
2 x Carbon Brush
Tough Equipment & Tools, Pay Less
VEVOR — ведущий бренд, специализирующийся на оборудовании и инструментах. Наряду с тысячами мотивированных сотрудников VEVOR стремится предоставлять нашим клиентам прочное оборудование и инструменты по невероятно низким ценам. Сегодня VEVOR оккупировал рынки более чем 200 стран с более чем 10 миллионами членов по всему миру.
Почему выбирают ВЕВОР?
- Premium Tough Quality
- Невероятно низкие цены
- Быстрая и безопасная доставка
- 30-дневный бесплатный возврат
- Внимательное обслуживание 24 часа в сутки 7 дней в неделю в оборудовании и инструментах. Наряду с тысячами мотивированных сотрудников VEVOR стремится предоставлять нашим клиентам прочное оборудование и инструменты по невероятно низким ценам. Сегодня VEVOR оккупировал рынки более чем 200 стран с более чем 10 миллионами членов по всему миру.
Почему выбирают ВЕВОР?
- Premium Tough Quality
- Incredibly Low Prices
- Fast & Secure Delivery
- 30-Day Free Returns
- 24/7 Attentive Service
Brushed DC Motor 1/2HP 90V 56C 1750RPM TENV
The 1/2HP Предлагаемый нами двигатель постоянного тока представляет собой двигатель постоянного тока с постоянными магнитами, напряжением 90 В, системой TENV, рамой 56C и номинальной скоростью 1750 об/мин.
Благодаря съемному основанию и прочному стильному синему корпусу, высокой эффективности и длительному сроку службы вы можете быть уверены в покупке.- Двигатель постоянного тока с постоянными магнитами
- Эффективный и долговечный
- Съемное основание
- Запасные угольные щетки
Коллекторный двигатель постоянного тока лучше предотвратить повреждение от перегрева. Номинальная скорость: 1750 об/мин, л.с.: 1/2.
Durable Прочный корпус
Внешний корпус из высококачественной стали, класс изоляции F, прочный и прочный. Шариковые подшипники с двойным уплотнением и постоянной консистентной смазкой для длительного срока службы.
Со съемным основанием
Наш двигатель постоянного тока tenv имеет съемное основание и раму 56C для универсальности двойного монтажа. Легко монтируется и снимается.
Полностью закрытый без вентиляции
Двигатель представляет собой коллекторный двигатель постоянного тока TENV (полностью закрытый без вентиляции).
Встроенный вентилятор охлаждает без повышения температуры. Торцевая пластина из алюминиевого сплава для предотвращения коррозии.Угольные щетки в комплекте
Одна пара запасных угольных щеток. Угольная щетка является расходным материалом и должна регулярно заменяться. Класс изоляции: F, коэффициент эксплуатации: 1,10.
Широкое применение
Коллекторные двигатели постоянного тока стали доминировать во многих областях применения. Наши двигатели постоянного тока обычно используются в таком оборудовании, как устройство для снятия проволоки, пресс-подборщик, резак для бумаги и т. д. 90 В
- Номинальный ток: 5,0 А
- Номинальная мощность: 1/2 л.с.
- Номинальная скорость: 1750 об/мин
- Скорость холостого хода: 1930 об/мин
- Rated Torque: 2.05 N.m
- Enclosure: TENV
- Frame: 56C
- Service Factor: 1.10
 Благодаря съемному основанию и прочному стильному синему корпусу, высокой эффективности и длительному сроку службы вы можете быть уверены в покупке.
Благодаря съемному основанию и прочному стильному синему корпусу, высокой эффективности и длительному сроку службы вы можете быть уверены в покупке.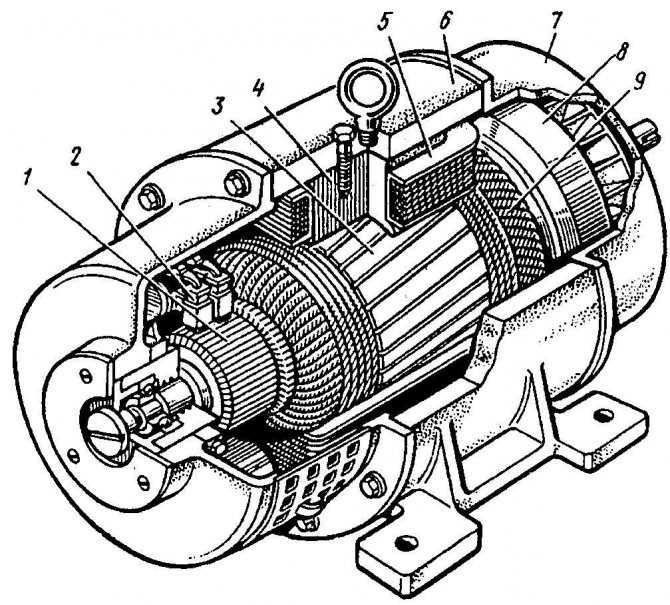 Встроенный вентилятор охлаждает без повышения температуры. Торцевая пластина из алюминиевого сплава для предотвращения коррозии.
Встроенный вентилятор охлаждает без повышения температуры. Торцевая пластина из алюминиевого сплава для предотвращения коррозии.- Rated Voltage
- 90V
- Rated Current
- 5. 0 A
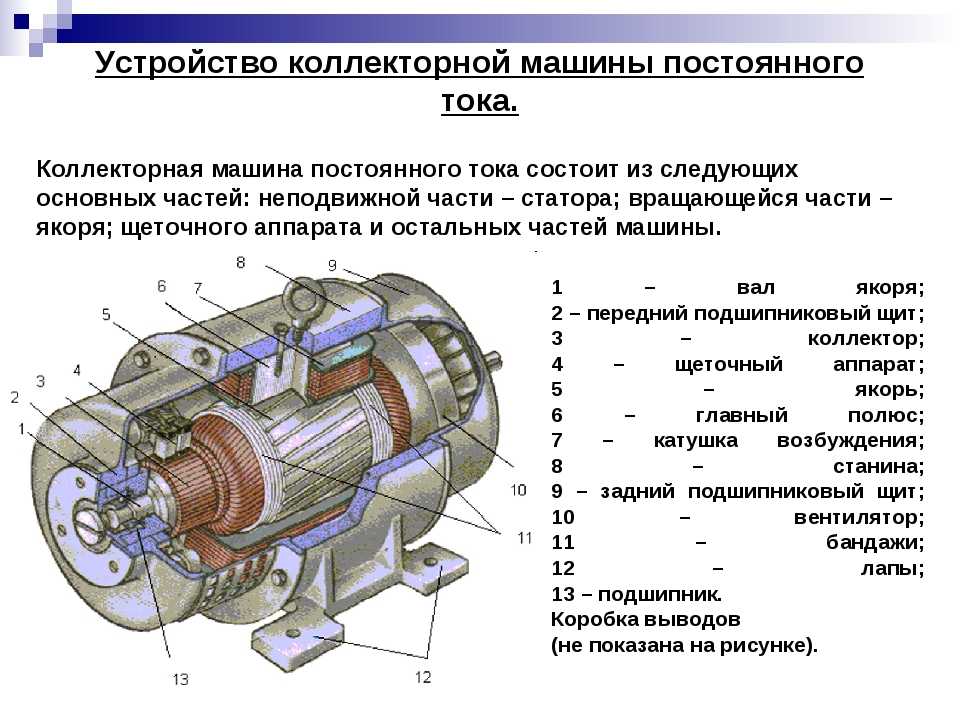 0 A
0 A- Rated Power
- 1/2 л.с.
- Номинальная скорость
- 1750 об/мин
- Скорость холостого хода
- 1930 об/мин
9 9,9 690 Номинальный крутящий момент0699
- Enclosure
- TENV
- Frame
- 56C
- Service Factor
- 1.10
Questions and Answers
2 Questions
Задайте вопрос
Вопросы
Доступен ли этот двигатель с резьбовым валом?
Ответить
Посмотреть больше
Нет, это не так.
Вевор
(0)
(0)
Вопросы
привет какой диаметр вала
Ответ
Посмотреть больше
Это 15,87 мм.
Вевор
(0)
(0)
Отзывы покупателей
Цена
4,8Качественный
4.6Функции
4.6Легко использовать
4,7
16 Reviews
Jesus
Que llega a tiempo
Es buen motor no falla ya que tengo 4 trabajando y son buenos
See more See less
0
walker
Отличный мотор, использую его в моем бассейне
Хуже всего в этом моторе найти щетки нужного размера, которые требуются для мотора. Да, вы получаете дополнительный набор, но после этого удачи в поиске кистей нужного размера.
Да, вы получаете дополнительный набор, но после этого удачи в поиске кистей нужного размера.
Показать больше Показать меньше
0
david
Выглядит хорошо
Я включил питание, и он работает тихо. В вещи Vevor можно попасть или промахнуться, но это выглядит как предмет приличного качества.
См. больше См. меньше
1
Sam
Подходит и работает с моделью Razor mx-500
Подходит и работает с моделью Razor mx00.
См. Подробнее См. Меньше
0
Крис
Слышал, что они сказали, что
Пришел вовремя и был идеальным посадком
.
Просмотреть все отзывы клиентов
Люди, которые просматривали этот товар, также просматривали
- Корзина
- Список желаний
- Свяжитесь с нами
- Отследить ваш заказ
- О нас
Наверх
855-385-1880
С понедельника по пятницу, 08:00-17:00, GMT-7
©2009 — 2022 ВЕВОР Все права защищены
Изучение основ двигателей постоянного тока и малогабаритных двигателей постоянного тока
Что такое двигатель постоянного тока?
Двигатель постоянного тока (DC) представляет собой вращающееся электрическое устройство, которое преобразует постоянный ток электрической энергии в механическую энергию. Индуктор (катушка) внутри двигателя постоянного тока создает магнитное поле, которое создает вращательное движение, когда на его клемму подается постоянное напряжение. Внутри двигателя находится железный вал, обмотанный проволокой. Этот вал содержит два фиксированных, северный и южный, магниты с обеих сторон, которые вызывают как отталкивающую, так и притягивающую силу, в свою очередь, создавая крутящий момент. ISL Products разрабатывает и производит как коллекторные, так и бесщеточные двигатели постоянного тока. Мы адаптируем размер и производительность наших двигателей постоянного тока в соответствии с вашими требованиями.
Индуктор (катушка) внутри двигателя постоянного тока создает магнитное поле, которое создает вращательное движение, когда на его клемму подается постоянное напряжение. Внутри двигателя находится железный вал, обмотанный проволокой. Этот вал содержит два фиксированных, северный и южный, магниты с обеих сторон, которые вызывают как отталкивающую, так и притягивающую силу, в свою очередь, создавая крутящий момент. ISL Products разрабатывает и производит как коллекторные, так и бесщеточные двигатели постоянного тока. Мы адаптируем размер и производительность наших двигателей постоянного тока в соответствии с вашими требованиями.
Подробнее
Что такое мотор-редуктор постоянного тока?
Мотор-редуктор представляет собой единую комбинацию двигателя и редуктора. Добавление редуктора к двигателю снижает скорость при увеличении выходного крутящего момента. Наиболее важными параметрами мотор-редукторов являются скорость (об/мин), крутящий момент (фунт-дюйм) и КПД (%).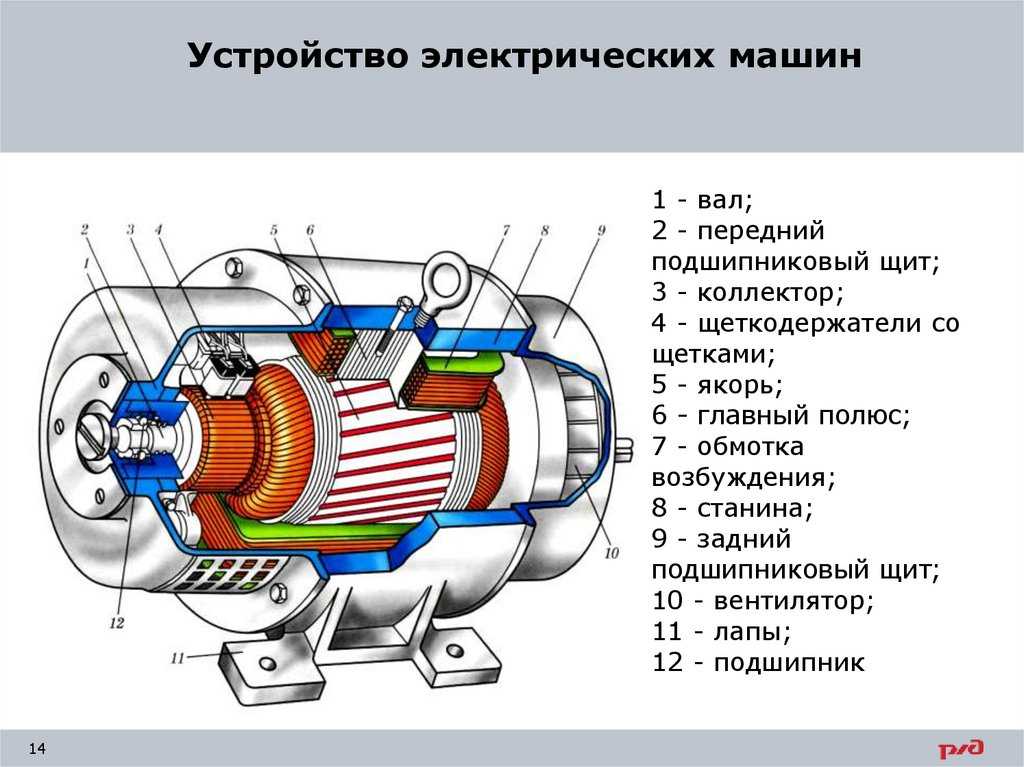 Чтобы выбрать мотор-редуктор, наиболее подходящий для вашего приложения, вы должны сначала рассчитать требования к нагрузке, скорости и крутящему моменту для вашего приложения. ISL Products предлагает широкий выбор двигателей с прямозубыми, планетарными и червячными редукторами, отвечающих всем требованиям применения. Большинство наших двигателей постоянного тока можно дополнить одним из наших уникальных редукторов, что обеспечит вам высокоэффективное решение для мотор-редукторов.
Чтобы выбрать мотор-редуктор, наиболее подходящий для вашего приложения, вы должны сначала рассчитать требования к нагрузке, скорости и крутящему моменту для вашего приложения. ISL Products предлагает широкий выбор двигателей с прямозубыми, планетарными и червячными редукторами, отвечающих всем требованиям применения. Большинство наших двигателей постоянного тока можно дополнить одним из наших уникальных редукторов, что обеспечит вам высокоэффективное решение для мотор-редукторов.
База данных Motor Solution
Процесс выбора двигателя
Нужна помощь в выборе двигателя, подходящего для вашего приложения? Ознакомьтесь с нашим руководством по выбору двигателя или посетите базу данных двигателей ISL.
Процесс выбора двигателя на этапе концептуального проектирования может быть сложным, но наши инженеры готовы помочь. Мы обеспечиваем консьерж-подход ко всем нашим проектам двигателей постоянного тока и мотор-редукторов. Наша команда инженеров работает с вами, чтобы предоставить оптимальное решение для компонентов.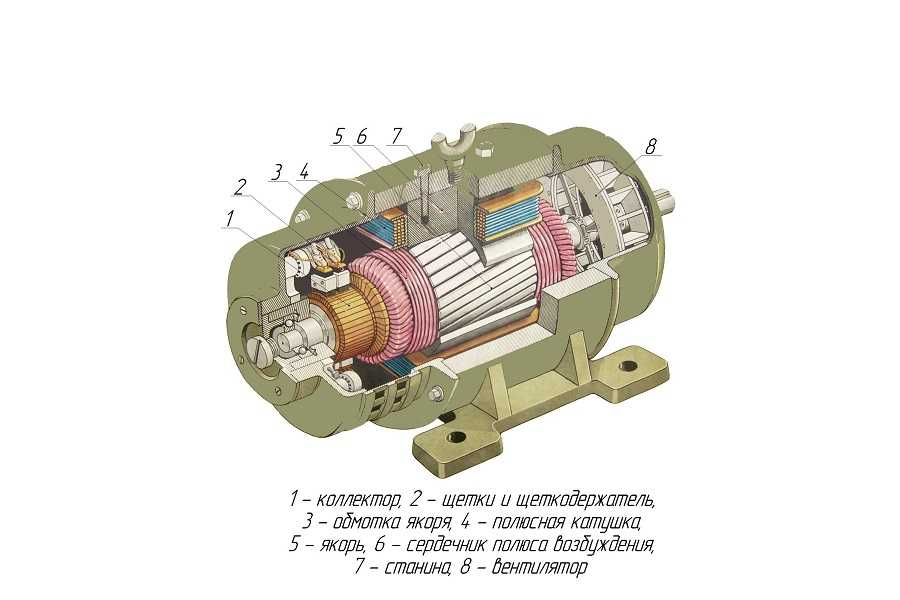 Следующие ключевые моменты могут помочь вам определить и выбрать двигатель или мотор-редуктор, наиболее подходящий для вашего применения.
Следующие ключевые моменты могут помочь вам определить и выбрать двигатель или мотор-редуктор, наиболее подходящий для вашего применения.
- Требования к дизайну – Этап оценки проекта, на котором изучаются требования к разработке продукта, параметры дизайна, функциональность устройства и оптимизация продукта.
- Расчеты конструкции – Расчеты, используемые для определения двигателя, который будет лучшим решением для вашего применения. Конструктивные расчеты определяют передаточное число, крутящий момент, вращающуюся массу, эксплуатационный коэффициент, радиальную нагрузку и анализ испытаний.
- Типы двигателей постоянного тока/мотор-редукторов – Наиболее распространенные электродвигатели преобразуют электрическую энергию в механическую. Эти типы двигателей питаются от постоянного тока (DC).
- Матовый
- Бесщеточный (BLDC)
- Планетарные мотор-редукторы
- Цилиндрические мотор-редукторы
- Шаговый двигатель
- Без сердечника и без сердечника Бесколлекторный
- Сервопривод
- Головки зубчатых колес
- Технические характеристики двигателя — После выполнения проектных расчетов и определения параметров применения вы можете использовать эти данные, чтобы определить, какой двигатель или мотор-редуктор лучше всего подходит для вашего приложения. Вот некоторые из наиболее распространенных характеристик, которые следует учитывать при выборе двигателя или мотор-редуктора:
- Напряжение
- Текущий
- Мощность
- Крутящий момент
- об/мин
- Ожидаемый срок службы/рабочий цикл
- Вращение (по часовой или против часовой стрелки)
- Диаметр и длина вала
- Ограничения корпуса
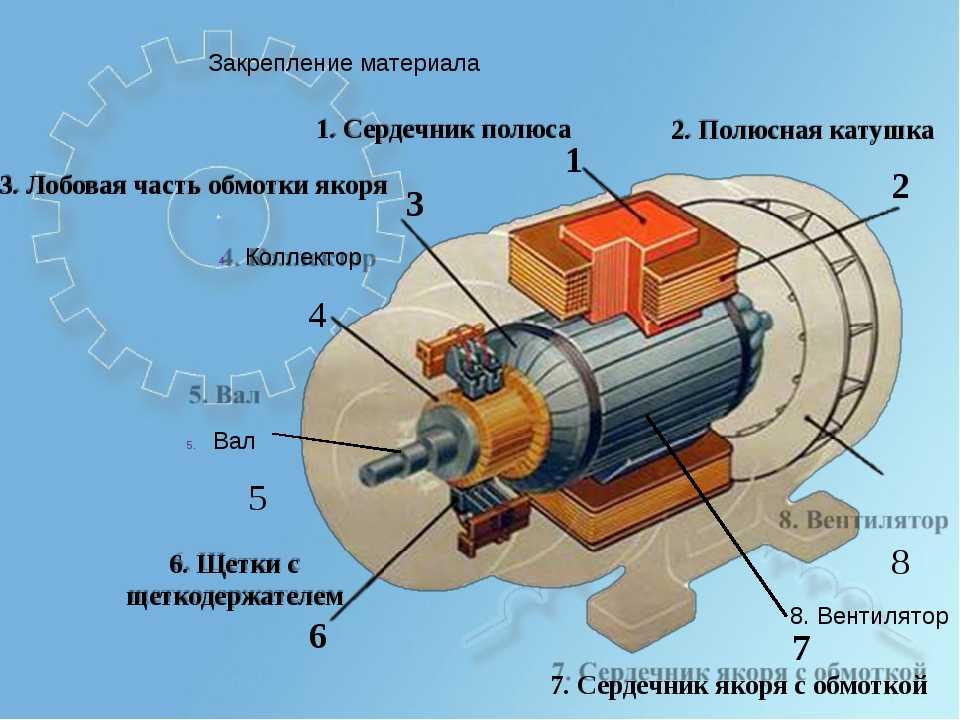 Вот некоторые из наиболее распространенных характеристик, которые следует учитывать при выборе двигателя или мотор-редуктора:
Вот некоторые из наиболее распространенных характеристик, которые следует учитывать при выборе двигателя или мотор-редуктора:Contact Engineering
Кривые рабочих характеристик мотор-редуктора
Характеристики двигателей и коробок передач объединены в один график с отображением трех конкретных параметров. Этими тремя параметрами являются скорость, крутящий момент и КПД. Эти рабочие характеристики необходимы при выборе мотор-редуктора для вашего применения.
Скорость/Обороты (Н) – ( единица измерения: об/мин) обозначено как прямая линия, показывающая зависимость между крутящим моментом мотор-редуктора и скоростью. Эта линия будет смещаться вбок в зависимости от увеличения или уменьшения напряжения.
Эта линия будет смещаться вбок в зависимости от увеличения или уменьшения напряжения.
- Эффективность (η) – ( единица измерения: %) рассчитывается по входным и выходным значениям, представленным пунктирной линией. Чтобы максимизировать потенциал мотор-редуктора, его следует использовать при максимальном КПД.
- Крутящий момент (T) – ( единица измерения: гс-см) это нагрузка на вал двигателя, представленная на оси X.
- Ток (I) – ( блок: A) обозначен прямой линией от холостого хода до полной блокировки двигателя. Это показывает зависимость между силой тока и крутящим моментом.
- Выход (P) – (единица измерения: Вт) – количество механической энергии, вырабатываемой мотор-редуктором.
Как читать кривые производительности
Например, давайте рассмотрим кривую производительности ниже (рис.