





рования. Недостатком АВ является потребность в большой мощности управления, достигающей 50...80% номинальной мощности возбудителя.
Рис. 2.2.1.36. Бесконтактная синхронная машина с асинхронным (а) и синхронным (б) возбудителями
Синхронные возбудители имеют в 10...15 раз большие постоянные времени, чем у АВ. Это является их недостатком. Но у СВ существенно меньшей является мощность управления, определяемая потерями в обмотке возбуждения СВ. Чтобы повысить быстродействие, СВ могут выполняться без демпферных обмоток. Это приводит к увеличению индуктивного фазного сопротивления коммутации, определяемого значением переходного индуктивного сопротивления СВ, и к ухудшению режима коммутации вращающегося ППВ.
Одним из эффективных способов улучшения показателей синхронных машин со статическими системами возбуждения является снижение напряжения на обмотке возбуждения ОВ при соответствующем росте тока. Понижение напряжения на ОВ облегчает условия охлаждения машины благодаря уменьшению числа витков и увеличению сечения проводников ОВ, увеличивает полезное сечение ОВ на 60...80 % за счет уменьшения объема изоляции.
Однако для получения токов возбуждения в тысячи ампер при значительно меньших значениях токов, допускаемых тиристорами, приходится применять параллельное соединение тиристоров в ППВ, что вызывает определенные трудности с равномерным распределением токов между тиристорами параллельных ветвей. Это объясняется неодинаковыми параметрами тиристоров, что приводит к перегрузке по току тиристоров, имеющих более крутые ветви прямой вольт-ампернойхарактеристики.
Кроме независимой вентильной системы возбуждения, применяются и системы самовозбуждения. Преимуществом таких систем является то, что они не имеют электромашинного возбудителя; необходимая для возбуждения синхронной машины энергия отбирается от главной или дополнительной
73
обмотки якоря. В результате повышается надежность системы, уменьшается ее стоимость.
На рис. 2.2.1.37 показана схема тиристорного самовозбуждения турбогенератора ТГВ-300.
Рис. 2.2.1.37. Тиристорная система самовозбуждения:
РР — разрядник, защищающий обмотку возбуждения от перенапряжения; ГС — гасящее сопротивление; КС — контактор (ГС и КС используются
при включении турбогенератора в сеть способом самосинхронизации) 74
Система возбуждения имеет две группы тиристоров, одна из которых (РГВ) образует рабочий выпрямитель, а другая (ФГВ) — форсировочный. Рабочая группа тиристоров, обеспечивающая в основном нормальный режим работы, присоединена к ответвлению трансформатора ВТ, подключенного к выводам обмотки статора турбогенератора. К форсировочной группе тиристоров подводится геометрическая сумма напряжений двух трансформаторов: выпрямительного ВТ и последовательного СТ. Первичная обмотка последовательного трансформатора — СТ1 — включена последовательно в цепь статора турбогенератора, а вторичная — СТ2 — последовательно со вторичной обмоткой выпрямительного трансформатора. Благодаря этому выпрямленное напряжение зависит не только от напряжения турбогенератора, но и от тока его обмотки статора. Это позволяет обеспечить как нормальные режимы работы турбогенераторов, так и форсировку тока ротора при удаленных и близких коротких замыканиях. При этом в случае удаленных КЗ форсировка тока возбуждения создается напряжением выпрямительного трансформатора ВТ, а при близких КЗ — напряжением последовательного трансформатора. Поэтому требуемая кратность форсировки достигается во всех случаях. Применяются также схемы только с выпрямительным трансформатором. Они проще, однако при КЗ вблизи генератора напряжение на его выводах снижается, что приводит к снижению напряжения и на тиристорах. Таким образом, последовательный трансформатор обеспечивает более надежное возбуждение при близких КЗ. Как рабочий, так и форсировочный выпрямители имеют по шесть параллельных ветвей в каждом плече и в каждой ветви по три тиристора, включенных последовательно. Распределение тока по ветвям достигается индуктивными делителями тока. В каждой ветви установлены предохранители для защиты от коротких замыканий внутри преобразователя. Система возбуждения сохраняет свою работоспособность при выходе из строя одной из параллельных ветвей в плечах мостов преобразователей. Для измерений токов ротора рабочей и форсировочной групп тиристоров в схеме установлены измерительные шунты Ш1...ШЗ. Отключение одного моста или автоматического регулятора возбуждения АРВ в двух групповой схеме не приводит к потере возбуждения турбогенератора. Управление тиристорами и током возбуждения осуществляется от систем управления СУТР и СУТФ. При пуске турбогенератора, когда напряжение на обмотке статора отсутствует, ток в ротор подается от постороннего источника включением контактора 1К. Схема начального возбуждения автоматически отключается после начала процесса самовозбуждения. Гашение поля производится автоматом гашения поля АГП с одновременным переводом тиристоров в инверторный режим. Контактор 2АВ переключает обмотку ро-
тора на резервный возбудитель. Недостатком системы самовозбуждения
является относительно низкая стабильность напряжения.
75
Использование полупроводниковых преобразователей частоты открывает большие возможности при создании электромеханических систем с синхронными двигателями (СД). Эти системы обладают такими несомненными достоинствами, как стабильность угловой скорости независимо от момента нагрузки во всем диапазоне регулирования угловой скорости, большими значениями моментов на ползучих скоростях при регулировании напряжения и тока возбуждения. Они позволяют получить высокую точность синхронного движения управляемых машин.
Напомним, что электромагнитный момент синхронного двигателя с явно выраженными полюсами определяется следующей зависимостью:
| 3UE | 0 |
| 3U2 | 1 |
| 1 |
|
| |
M = |
| sin(θ)+ |
|
|
| − |
| sin(2θ), | (2.2.1.63) | |
|
|
|
|
| ||||||
| ω0xd |
|
|
|
|
|
|
| ||
| 2ω0xq |
| xd |
| ||||||
где U — напряжение якоря;Е0 — ЭДС, индуцируемая в обмотке якоря;ω0 — угловая скорость магнитного поля;xd — синхронное индуктивное сопротивление по продольной оси;xq — синхронное индуктивное сопротивление по поперечной оси;θ — угол нагрузки.
Это выражение удобно представить, пренебрегая насыщением в виде
| UI | B | U | 2 |
| ||
M = A |
| sin(θ)+B |
|
| sin(2θ), | (2.2.1.64) | |
|
|
| |||||
| f |
|
| f |
|
|
|
|
|
|
|
|
| ||
где IВ — ток возбуждения синхронного двигателя; А и В — постоянные величины.
Рассмотрим режим работы СД при f = const;U = var;IB = var. Этот режим является наиболее характерным для нерегулируемых систем с синхронными двигателями. Формула электромагнитного момента для этого случая имеет вид:
M =C1UIB sin(θ)+C2U 2 sin(2θ), | (2.2.1.65) |
где C1 =A/f;C2 =B/f2.
Для характеристики электромеханических свойств удобно рассматривать регулирование синхронного двигателя отдельно при Iв = var;U = const иIв = const;U = var.Моментно-угловыехарактеристики при этом соответственно представлены на рис. 2.2.1.38 и рис. 2.2.1.39. При частотном регулировании СД, когдаU/f = const;IB = var, аналитическая зависимость для момента
имеет вид |
|
M =C1IB sin(θ)+C2 sin(2θ), | (2.2.1.66) |
где C1=AU/f; C2 = B(U/f)2.
Характеристики для этого случая представлены на рис. 2.2.1.40. Рассмотрим режим частотного регулирования СД при U = const;Iв = const;f = var. Формула электромагнитного момента:
M = | C1 | sin(θ)+ | C2 | sin(2θ), | (2.2.1.67) | |
f | f 2 | |||||
|
|
|
| |||
|
| 76 |
|
| ||
где C1=AUIB; C2 = BU2.
Из последнего выражения видно, что при сниженных угловых скоростях (частотах напряжения статора) синхронный двигатель обладает значительным максимальным моментом. Моментно-угловыехарактеристики для случая изменения только частоты приведены на рис. 2.2.1.41.
Рис. 2.2.1.38. Моментно-угловыехарактеристики синхронного двигателя приIВ = var;U = const: 1 — нормальное возбуждение; 2
—повышенное возбуждение; 3
—пониженное возбуждение; М1
—момент от поля возбуждения;
М2 — момент от явнополюсности; М — суммарный момент
Рис. 2.2.1.39. Моментноугловые характеристики синхронного двигателя при IВ =
const; U = var: 1 -U =Uном; 2 –U >UHOМ, 3 -U<UHOM;M1 —
момент от поля возбуждения; M2 — момент от явнополюсности;M — суммарный момент
Увеличение максимального момента при снижении угловой скорости (частоты статорного напряжения) СД, но при неизменном напряжении связано с большим значением тока статора, которое определяется уменьшением противоЭДС и реактивных сопротивлений машины.
Закон регулирования напряжения и тока возбуждения неявно полюсного синхронного двигателя или приближенный закон регулирования для крупных явно полюсных синхронных двигателей при изменении угловой скорости (частоты) и момента нагрузки и заданном запасе статической устойчивости найдем, воспользовавшись первой составляющей (2.2.1.64) для электромагнитного момента.
При постоянстве угла нагрузки синхронного двигателя закон регулирования напряжения и тока возбуждения находим следующим образом:
1sin(θном)= AUномIВ.ном(fномMном )= AU IB(fM ),
77
откуда
UIB(UномIВ.ном)= f M (fномMном ). | (2.2.1.68) |
При U/f =Uном/fном = const получим зависимость регулирования тока возбуждения синхронного двигателя от момента на валу:
Рис. 2.2.1.40. Моментно-угловые | Рис. 2.2.1.41. Моментно- | ||
характеристики | частотно- | угловые | характеристики син- |
регулируемого | синхронного | хронного двигателя при U = | |
электропривода при U/f= const;Iв | const; Iв = const;f = var:M1 — | ||
= var: 1 — нормальное возбуж- | момент от поля возбуждения, | ||
дение; 2 — повышенное возбуж- | M2 — момент от явнополюс- | ||
дение; 3 — пониженное возбуж- | ности; М — суммарный мо- | ||
дение; М1 — момент от поля | мент |
| |
возбуждения; М2 — момент от |
|
| |
явнополюсности; М — суммар- |
|
| |
ный момент | Iв/Iв.ном= M/Мном. | (2.2.1.69) | |
| |||
Из выражения (2.2.1.69) следует, | что при постоянном отношении U/f | ||
возбуждение синхронного двигателя должно изменяться прямо пропорционально изменению момента на валу.
Для Iв =Iв.ном = const из (2.2.1.68) следует, чтоU/f =Uном/fном = const, и
регулирование производится при постоянном моменте.
При постоянной мощности регулирование осуществляется изменением только частоты при неизменном возбуждении и напряжении.
78
f = const при Р = Рном = const; U/f2
По аналогии с двухзонным регулированием двигателей постоянного тока независимого возбуждения можно осуществить двухзонное регулирование угловой скорости синхронных двигателей; при постоянном моменте используется регулирование в зоне до номинальной угловой скорости, а при постоянной мощности — в зоне регулирования выше номинальной угловой скорости.
Для синхронных двигателей с явно выраженными полюсами при существенном влиянии реактивной составляющей момента закон регулирования напряжения определяется таким же образом, как и для неявно полюсной машины. Из уравнения (2.2.1.63) при условии постоянства угла θ и тока возбуждения (IВ = const), приняв в ограниченном диапазоне регулирования угловой скоростиE ≈ U, получим
U | = | f | M , | (2.2.1.70) |
Uном |
| fном | M ном |
|
т. е. закон регулирования имеет тот же вид, что и для асинхронного двигателя при частотном управлении. Следовательно, и частотные законы регулирования для различного вида нагрузок будут одинаковыми для обоих типов машин:
U/f = const приМ =Мном = const,U/= const при вентиляторной нагрузке.
При низких частотах пренебрежение активным сопротивлением статорной обмотки вносит значительное искажение в расчетное значение электромагнитного момента. Однако отрицательное влияние активного сопротивления статора на характеристики синхронного двигателя проявляется в меньшей степени и при относительно более низких частотах, чем в случае асинхронного двигателя, и может быть в определенной мере скомпенсировано регулированием возбуждения.
Частотное регулирование, являясь практически единственным способом регулирования угловой скорости синхронных двигателей, характеризуется в основном такими же показателями, что и частотное регулирование асинхронных двигателей с короткозамкнутым ротором.
Современные электромеханические системы с СД, несмотря на разнообразие вариантов, имеют определенные общие черты в отношении состава, взаимосвязи основных частей, принципа действия [4], которые отражены на функциональной схеме, представленной на рис. 2.2.1.42.
Обмотка якоря двигателя М питается от полупроводникового преобразователя частотыUF, обмотка возбуждения — от полупроводникового возбудителя ME. Управление преобразователем частоты (ПЧ) и возбудителем осуществляет устройство автоматического регулирования ACL. В это устройство вводится задание скорости системы от органа ручного управления АСН или от системы автоматического управления скоростными режимами технологического агрегата.
79
В устройство регулирования поступает информация о положении ротора двигателя от датчика углового положения ротора BG, механически соединенного с двигателем, а также об электрическом состоянии двигателя от датчиков тока якоря UA и возбуждения UAE (возможно использование и других датчиков). В большинстве современных электромеханических систем с СД управление преобразователем частоты осуществляется в функции углового положения ротора двигателя. При этом в любом установившемся режиме выходная частота ПЧ в точности совпадает с частотой ЭДС вращения СД.
Рис. 2.2.1.42. Общая функциональная схема регулируемого электропривода с синхронным двигателем
Рассмотрим ПЧ, применяемые для питания якоря СД в регулируемых системах. Ими могут быть НПЧ, представляющие собой совокупность нескольких реверсивных комплектов тиристорных преобразователей, выполненных по системе выпрямитель—инвертор(ВИ).
Если имеется три реверсивных ВИ и на их входы поданы синусоидальные сигналы с одинаковой амплитудой и сдвигом на 1/3 периода, то образуется симметричный трехфазный источник с регулируемой частотой и амплитудой, который может быть использован для питания трехфазной обмотки якоря.
Коммутация тиристоров ВИ — естественная под действием напряжения источника питания. Для питания трехфазной обмотки якоря используются три ВИ; возможные варианты схемы цепей якоря показаны на рис. 2.2.1.43. На рис. 2.2.1.43,а фазы якоря изолированы друг от друга, питание же трех ВИ осуществляется от общего трехфазного источника — трансформатора или генератора. На рис. 2.2.1.43,б фазы якоря соединены друг с другом, например по схеме Y, но для питания выпрямителя необходимы три изолированных друг от друга источника — три трехфазных обмотки трансформатора или генератора.
В системах большей мощности используются ВИ по двенадцатитактной схеме: последовательной (рис. 2.2.1.44,а) или параллельной (рис. 2.2.1.44,б).
80
Формирование управляющих импульсов в НПЧ для тиристоров каждого из ВИ осуществляется СИФУ.
Рис. 2.2.1.43. Схемы главных цепей синхронного двигателя с НПЧ: а — изолированное питание обмоток;б — трехпроводная схема
Частота выходного напряжения может изменяться от нуля. По мере увеличения выходной частоты ухудшается гармонический состав выходного напряжения НПЧ и токов, потребляемых им от источника питания; нагрузка тиристоров становится неравномерной; для сглаживания пульсаций токов якоря необходимы в этом случае индуктивности.
81
Некоторую их часть составляют индуктивности рассеяния якоря. При росте частоты растет и напряжение на этих индуктивностях, режим работы электромеханической системы становится весьма неэкономичным. Эти обстоятельства ограничивают сверху частотный диапазон уровнем 1/4...1/3 частоты источника у шеститактных преобразователей, 1/3...1/2 у двенадцатитактных.
Рис. 2.2.1.44. Схемы двенадцатитактных НПЧ: а — последовательная;б — параллельная
Каждый ВИ, входящий в НПЧ, потребляет от источника реактивную мощность. Потребление реактивной мощности тем больше, чем меньше выходное напряжение.
Для питания маломощных (до 10 кВт) СД используются инверторы напряжения с широтно-импульсноймодуляцией (ИН с ШИМ) (рис. 2.2.1.45,а), которые преобразуют постоянное напряжение в напряжение регулируемой частоты и амплитуды.
Силовая цепь ИН с ШИМ образуется полностью управляемыми ключевыми элементами (рис. 2.2.1.45,б). Для трехфазного якоря используется шесть ключей, соединенных по мостовой схеме. Ключ должен не только открываться, но и закрываться по сигналам управления. Наиболее перспективны ИН с ШИМ на основе полностью управляемых полупроводниковых приборов: двухоперационных тиристоров или силовых транзисторов.
Каждая пара ключей (А1...А4, А3...А6, А5...А2) с определенной периодичностью (период модуляции) переключается. Для снижения коммутационных потерь энергии желательно иметь частоту модуляции fм как можно более низкой. Однако имеются обстоятельства, которые ограничивают снизу частоту модуляции. Объясняется это тем, что при малом отношении частоты
82
модуляции к максимальной рабочей частоте fsmax затруднено сглаживание токов якоря. Кроме того, при малом отношении частот неблагоприятно влияет дискретный характер управления ИН с ШИМ. Поэтому обычное отношение частот принимают по условиюfM/fsmax ≈ 10...20.
Рис. 2.2.1.45. Схемы главных цепей синхронного двигателя, питаемого от инвертора напряжения с ШИМ
Для питания якорей СД, особенно быстроходных, широко применяются преобразователи частоты с АИТ. Схема главной цепи ПЧ с АИТ представляет собой совокупность двух нереверсивных тиристорных ВИ, один из которых — UV — подключен к источнику питания (трансформатору, генератору), другой — UZ — к якорю СД (рис. 2.2.1.46).
Рис. 2.2.1.46. Схема главных цепей синхронного двигателя, питаемого от преобразователя частоты с АИТ
В промежуточной цепи постоянного тока включен сглаживающий реактор L. В двигательном режиме СД преобразователь UV работает выпрямителем; он передает энергию от источника в цепь постоянного тока.
Преобразователь UZ работает как инвертор, он передает энергию из цепи постоянного тока в якорь синхронного двигателя. В тормозном режиме СД преобразователь UZ переходит в выпрямительный режим, а преобразователь UV — в инверторный.
83
Преобразователь UV, как и любой ВИ, подключенный к источнику, работает во всех режимах с естественной коммутацией вентилей от напряжения источника. В АИТ (преобразователь UZ) — коммутация естественная от ЭДС вращения СД. Необходимая для работы АИТ реактивная мощность поступает от синхронного двигателя, который должен работать как источник реактивной мощности с опережающим током якоря. Условия коммутации тиристоров АИТ накладывают ограничения на режимы синхронного двигателя, вследствие этого несколько ухудшаются его массогабаритные и энергетические показатели.
Современные преобразователи частоты с АИТ позволяют получить выходную частоту до 1000... 5000 Гц. Диапазон регулирования скорости сравнительно невелик — до 10:1.
Объясняется это тем, что при малых угловых скоростях ЭДС вращения недостаточна для коммутации тиристоров АИТ.
Области применения разновидностей синхронных двигателей для регулируемых систем
Каждый из видов двигателей имеет свою целесообразную область практического применения в регулируемых электромеханических систе-
мах. Для СД такой областью являются прежде всего системы средней и большой мощности (с номинальным моментомMном > 3 кН м) и диапазоном регулирования скорости более 2:1. В этой области СД по сравнению, например, с асинхронным имеет более высокие энергетические показатели (КПД и соsϕ). Кроме того, СД обладает повышенной управляемостью. Специальные виды СД: с постоянными магнитами, с когтеобразными полюсами гомополярные машины — позволяют использовать преимущества СД и в системах малой мощности, и в мощных быстроходных и сверхбыстроходных электроприводах.
Неявнополюсный СД с электромагнитным возбуждением по одной оси имеет преимущества перед явнополюсным СД по механической надежности, но уступает ему в отношении потерь на возбуждение. Для низкочастотных высокодинамичных электроприводов существенное значение имеет и другой недостаток неявнополюсного СД: требуется повышенный запас по напряжению якоря, что вызывается повышенным эквивалентным значением поперечной составляющей индуктивного сопротивленияХmqэ. Уголθ между вектором основного потока Фδ и продольной осью СД изменяется в широких пределах при изменении момента, и для быстрого поворота вектора Фδ требуется значительное динамическое напряжение якоря. Поэтому данная разновидность СД, как и в случае питания от сети, может быть рекомендована для быстроходных приводов с максимальной частотой вращения 1500...3000мин-1 со спокойным режимом работы, например для насосов и турбокомпрессоров.
84
Явнополюсный синхронный двигатель с электромагнитным возбужде-
нием по одной оси — основной вид СД для регулируемых электромеханических систем. Он имеет высокие энергетические показатели по сравнению с другими разновидностями СД. Эти двигатели перспективны для главных приводов и большинства механизмов прокатных станов, электроприводов крупных экскаваторов, крупных цементных и рудоразмольных мельниц.
Противопоказания к применению явнополюсного СД связаны с контактным токосъемом и недостаточной механической надежностью ротора с обмотками (даже в обращенной конструкции), поэтому этот двигатель нецелесообразно применять для быстроходных систем с максимальной частотой вращения свыше 1500 мин-1.
Бесконтактный синхронный двигатель с электромагнитным возбуж-
дением применяется для систем в тех случаях, когда недопустим контактный токосъем. Такой двигатель позволяет создавать регулируемые электроприводы средней и большой мощности на большие частоты вращения — свыше 3000 мин-1.Для сверхбыстроходных систем перспективны гомополярные синхронные двигатели. Они применяются для быстроходных турбокомпрессоров, главных приводов скоростных проволочных станов.
Машины с когтеобразными полюсами отличаются более полным ис-
пользованием активных материалов. Их можно применять для электромеханических систем средней мощности и скорости. Явнополюсный компенсированный синхронный двигатель перспективен для низкочастотных сверхдинамичных электроприводов средней и большой мощности (чаще всего — в обращенной конструкции). По сравнению с некомпенсированным СД требуется пониженное динамическое напряжение якоря, поскольку вектор Фδ в целесообразных режимах компенсированного СД не отклоняется от продольной оси.
СД с постоянными магнитами — наиболее удачный вариант двигателя для электроприводов малой мощности с однозонным регулированием скорости, работающих при моментах, близких к номинальному. При недогрузке и перегрузке энергетические показатели этих двигателей заметно ухудшаются, что препятствует их применению в высокодинамичных электроприводах с частыми перегрузками, особенно при повышенных требованиях к энергетическим и массогабаритным показателям.
СД с комбинированным возбуждением не уступает по динамическим качествам СД с электромагнитным возбуждением. Так как СД с комбинированным возбуждением являются контактными, они отличаются от бесконтактных СД с электромагнитным возбуждением улучшенными энергетическими и массогабаритными показателями: вследствие применения постоянных магнитов существенно понижаются ток возбуждения и потери на возбуждение. Синхронный двигатель с комбинированным возбуждением по своим динамическим свойствам и режимам имеет преимущества по сравне-
85
нию с СД с постоянными магнитами: обеспечивает двухзонное регулирование скорости, высокоэкономичные режимы при резкопеременной нагрузке.
Итак, областью целесообразного применения СД с комбинированным возбуждением являются высокодинамичные электроприводы малой мощности с повышенными требованиями к массогабаритным и энергетическим показателям. Примером такого электропривода может служить мотор-колесоэлектромобиля.
2.2.1.5. Системы электропривода с шаговым двигателем. Системы электропривода с вентильным двигателем
В системах автоматики для преобразования управляющих импульсов в заданный угол поворота применяются синхронные двигатели, в которых магнитное поле статора не вращается равномерно, а поворачивается дискретно при подаче управляющего сигнала. При этом вращающий момент резко изменяется во времени и имеет форму импульсов, а ротор совершает дискретные перемещения. Такие СД называют импульсными или шаговыми
(ШД).
Статор ШД имеет две (иногда несколько) смещенные в пространстве сосредоточенные или распределенные обмотки, которые последовательно питаются постоянным током от сети постоянного тока через коммутатор. При этом полюсы ротора устанавливаются против возбужденных полюсов статора, по обмоткам которых протекает ток. При подаче тока в другие обмотки статора ротор поворачивается на один шаг в положение, при котором его полюсы устанавливаются против следующих возбужденных полюсов статора. При каждом переключении постоянного тока в обмотках статора (обмотках управления) ротор ШД поворачивается на один шаг, вследствие чего движение ротора состоит из последовательных элементарных поворотов или шагов, совершаемых по апериодическому или колебательному закону.
Функциональная схема электромеханической системы с шаговым двигателем приведена на рис. 2.2.1.47 [4].
ШД
fвх | ЭК |
|
ФИ | (РИ) | УМ |
БУ Рис. 2.2.1.47. Функциональная схема шагового привода
Состоит из ШД и электронного блока управления БУ. БУ преобразует последовательность импульсов входного сигнала fвх в многофазную систему напряжений, приложенных к фазам ШД. БУ состоит из ФИ – формирователь
86
studfiles.net
После того, как тиристор проверен, можно провести несколько простеньких экспериментов для практического ознакомления с его работой. Ну, это как раз из разряда «а руки-то помнят».
Как управлять тиристором?
Как включить тиристор? Включение тиристора постоянным током.
Чтобы ответить на этот вопрос придется собрать простую схемку, показанную на рисунке 1. После того, как схема собрана, ее следует подключить к источнику постоянного напряжения. Лучше всего, если это будет регулируемый лабораторный источник с защитой, хотя бы от короткого замыкания, ведь мало ли что может произойти в процессе опытов?
Движок переменного резистора R2 следует установить в нижнее по схеме положение. Затем, удерживая нажатой кнопку SB1, (лампочка еще гореть не должна) медленно перемещать движок вверх по схеме. В каком-то положении движка лампочка зажжется, после чего кнопку следует отпустить, тем самым сняв сигнал с УЭ. После отпускания кнопки лампочка должна остаться во включенном состоянии. Как все это можно объяснить?
Вращением движка резистора R2 мы увеличивали ток УЭ, при определенном значении которого, характеристика тиристора спрямилась и он открылся, как было показано на рисунке 2 . Резистор R1 предназначен для ограничения тока через УЭ, чтобы он не превысил допустимый уровень, оговоренный в справочных данных. Если теперь отпустить кнопку SB1, то лампочка останется зажженной, поскольку ее тока вполне хватает для удержания тиристора в открытом состоянии. Этот момент также показан на рисунке2, как Iуд.
Рисунок 1. Схема для опыта по включению тиристора
Если в этом опыте в точку А на рисунке 1 включить миллиамперметр, то можно измерить ток управляющего электрода. Если испытать несколько экземпляров тиристоров даже одной марки, ток управляющего электрода, при котором зажжется лампочка, будет разным, с достаточно значительным разбросом. Эти токи могут изменяться в диапазоне 10 - 15мА.
Также с помощью этой схемы можно определить ток удержания тиристора, для чего в точку В подключить миллиамперметр, а в точку Б переменный резистор величиной 2,2 - 3,3КОм, предварительно выведенный до нуля. После того, как вращением резистора R2 тиристор удастся включить, при отпущенной кнопке SB1 уменьшать ток в нагрузке с помощью дополнительного переменного резистора.
Наименьший ток, при котором произойдет отключение тиристора, и является током удержания для данного экземпляра. Ток удержания так же, как и ток управляющего электрода невелик, порядка 10 - 15мА, но, в обоих случаях, чем меньше, тем лучше.
Управление тиристором импульсным током
Для проведения этого опыта схему, показанную на рисунке 1, следует несколько изменить, приведя ее к виду в соответствие с рисунком 2.
Рисунок 2. Управление тиристором импульсным током
При нажатии на кнопку SB1 конденсатор C1 заряжается через УЭ тиристора, в результате чего тиристор открывается коротким импульсом зарядного тока, о чем свидетельствует светящаяся лампочка. Отпускание и последующее нажатие кнопки не приведет каким-либо изменениям, лампочка будет продолжать гореть. Погасить ее можно лишь теми способами, которые были рассмотрены ранее, а кроме них кратковременным подключением конденсатора C2, как показано пунктиром. Этот конденсатор шунтирует тиристор, ток через него становится равным нулю, в результате тиристор выключается. Вот только после этого можно снова воспользоваться кнопкой SB1. Чтобы быть готовым к следующему нажатию конденсатор C1 разряжается через резистор R1.
Тиристор в устройстве фазового регулятора мощности
На рисунке 3 показана схема простейшего регулятора мощности на тринисторе, там же временные диаграммы выходных напряжений.
Рисунок 3. Схема для изучения регулятора мощности
В зависимости от величины управляющего тока тиристор имеет свойство открываться при разном напряжении на аноде. Это свойство используется в схемах регуляторов мощности. На схеме показаны точки для подключения осциллографа, что позволит воочию увидеть диаграммы, показанные на рисунке. Если такой возможности нет, то придется просто поверить на слово.
Питание регулятора осуществляется от трансформатора, как в предыдущих опытах через диодный мост VD1 - VD4. Фильтрующий конденсатор параллельно мосту устанавливать нельзя, поскольку напряжение примет форму, показанную на рисунке 3а пунктиром, и тиристор не сможет выключаться в моменты перехода напряжения через нуль: лампочка, включившись один раз, так и будет продолжать гореть.
Вначале следует движок переменного резистора R2 установить в верхнее по схеме положение и нажать кнопку SB1. Сопротивление в цепи УЭ в этом случае невелико, всего 100 Ω, и ток, достаточный для открытия тиристора получится при напряжении на аноде чуть более одного вольта, в самом начале полупериода. Поэтому лампочка должна зажечься в полный накал, что соответствует временной диаграмме а, которую можно будет наблюдать на осциллографе.
Это напряжение получено в результате двухполупериодного выпрямления синусоиды. Вертикальной штриховки внутри полупериодов, конечно, не будет, это только на рисунке. При отпускании кнопки лампочка должна погаснуть в момент перехода выпрямленного напряжения через нуль.
Если снова нажать кнопку и медленно смещать движок переменного резистора вниз по схеме, то яркость свечения лампы будет уменьшаться, а на осциллографе можно увидеть искаженные куски полусиносоиды. На диаграммах они показаны вертикальной штриховкой. Мощность в нагрузке будет соответствовать заштрихованной площади – в это время тиристор открыт.
Это происходит потому, что при перемещении вниз движка резистора R2 сопротивление в цепи управляющего электрода увеличивается, и ток УЭ достаточный для открытия тиристора получается при все больших значениях напряжения на аноде.
Такое положение дел возможно лишь до диаграммы 3в, пока напряжение на аноде не достигло максимального значения. Заштрихованная часть диаграммы соответствует 50% мощности нагрузки при диапазоне регулирования всего 50 - 100%. Как же продолжить дальнейшее регулирование?
Для этого следует изменить фазу напряжения на УЭ относительно фазы напряжения на аноде, чего можно достичь весьма простым способом. Достаточно подключить конденсатор C1, как показано на схеме пунктиром. Теперь тиристор будет открываться при малых значениях анодного напряжения, начиная со второй части полупериода, как показано на диаграмме 3г, что позволит расширить диапазон регулирования от 0 - 100%.
После изучения теории и проведения простых практических занятий можно переходить к изготовлению светорегуляторов и регуляторов мощности.
Практические устройства на тиристорах
Основой светорегуляторов и регуляторов мощности являются, как правило, тиристоры и симисторы. О работе этих полупроводниковых приборов было рассказано в предыдущих трех частях статьи, и теперь можно познакомиться с устройством некоторых практических устройств на тиристорах. Все схемы, которые будут рассмотрены, используют фазовый принцип регулирования, описанный в конце третьей части статьи.
Вначале давайте познакомимся с достаточно простыми схемами, содержащими небольшое количество деталей, и хотя бы поэтому, наиболее доступными для повторения в любительских условиях. Впрочем, схемы могут быть и более сложными, но алгоритм их работы все равно один и тот же – регулировка яркости источника света. Иногда встречаются схемы, сочетающие в себе собственно светорегулятор и сумеречный выключатель, либо схему плавного включения лампы. Но, вначале самые простые схемы.
Чтобы не возвращаться к каждый раз к предыдущей части статьи, пожалуй, этот рисунок вставим еще раз в этом месте текста.
Рисунок 1. Временные диаграммы фазового регулятора мощности
Вертикальная штриховка соответствует включенному состоянию тиристора, а мощность, подводимая к нагрузке, пропорциональна площади заштрихованных участков.
На рисунке 2 показана схема простого светорегулятора, позволяющего только лишь регулировать яркость светильника, безо всяких дополнительных функций.
Рисунок 2. Простой светорегулятор
Сетевое напряжение через предохранитель FU1 поступает на выпрямительный мост VD1 - VD4, в диагональ которого по постоянному току включен тиристор VS1 и лампа EL1. В некоторых схемах лампа включается в диагональ моста по переменному току, но это не принципиально. Тиристор применен достаточно мощный, что позволяет управлять нагрузкой до 1000Вт, как, и указано на принципиальной схеме. Если такая мощность не требуется, то тиристор можно заменить другим, например, из серии КУ202М, что позволит управлять яркостью лампы мощностью не менее 500Вт.
В регуляторе используется фазовый метод управления: на управляющий электрод тиристора поступают импульсы, которые сдвинуты по фазе относительно напряжения на аноде. Схема, вырабатывающая управляющие импульсы, построена на однопереходном двухбазовом транзисторе VT1 типа КТ117А. Зарубежных аналогов этот транзистор не имеет.
Основным назначением этого транзистора является построение простейших генераторов – пищалок, схем запуска импульсных блоков питания (применялся в блоках питания телевизоров серии 3УСЦТ), а также генераторов управляющих импульсов в схемах фазового регулирования, подобной рассматриваемой. Работает этот генератор следующим образом.
Выпрямленное сетевое напряжение через резисторы R3, R4 стабилизируется последовательно соединенными стабилитронами VD5 VD6 на уровне около 22 - 25В, что зависит от конкретных экземпляров стабилитронов. Это напряжение, кстати, пульсирующее, соответствует диаграмме а) на рисунке 1.
Этим пульсирующим напряжением через резисторы R6, R7 заряжается конденсатор C2. Как только напряжение на нем достигнет величины открывания однопереходного транзистора VT1 он открывается и конденсатор C1 разряжается через его переход Б2 – Б1, резисторы R1, R2 и УЭ тиристора VS1, в результате чего формируется управляющий импульс, тиристор открывается и ток проходит через нагрузку. Когда выпрямленное пульсирующее напряжение проходит через ноль, тиристор закрывается и остается в закрытом состоянии до прихода следующего открывающего импульса.
Скорость заряда конденсатора C2 регулируется резистором R7. Когда его сопротивление минимально (движок выведен влево по схеме), скорость заряда максимальна, тиристор откроется в самом начале полупериода, пропуская в нагрузку максимальную мощность. При перемещении движка резистора R7 вправо по схеме скорость заряда конденсатора C2 снижается, поэтому управляющий тиристором VS1 импульс будет сформирован позднее. Поскольку это регулирование фазовое, а фаза измеряется угловыми единицами - радианами, говорят, что импульс формируется при определенном угле, в данном случае более позднем, чем при максимальной мощности в нагрузке. Именно этот процесс показан на рисунке 1 на диаграммах б, в, г.
На схеме пунктирной линией показаны светодиод HL1 и резистор R8. Их назначение показать, что устройство подключено к сети, а также контроль исправности лампы, если, конечно регулятор уведен на минимум. Но, собственно регулятор вполне работоспособен и без этого дополнения, или как теперь не скажут опции.
Настройка устройства достаточно проста. При выведенном до нуля резисторе R6 подбирается резистор R7 таким образом, чтобы яркость лампы была максимальной. Эта настройка зависит от величины конденсатора C2, значение которого также может потребовать подбора в пределах, указанных на схеме.
Рис. 3. Самодельный светорегулятор
В рассмотренной схеме в качестве коммутирующего элемента используется тиристор, поэтому, чтобы было возможно регулировать и положительную и отрицательную полуволну сетевого напряжения в схеме приходится применять диодный мост достаточно большой мощности.
Если же мощность нагрузки близка к максимально допустимой, то тиристор, а вместе с ним и диоды моста придется устанавливать на теплоотвод – радиатор, что еще больше увеличивает габариты устройства и трудоемкость его изготовления. Чтобы избавиться от применения мощного выпрямительного моста применяется встречно – параллельное включение двух тиристоров, что тоже не совсем удобно и технологично.
Гораздо лучшие результаты дает применение симметричных тиристоров – симисторов: в одном корпусе уже содержится два встречно – параллельно включенных тиристора. На рисунке 4 показана доработанная схема с использованием симистора.
Рисунок 4. Светорегулятор на симисторе
Небольшая доработка схемы позволит несколько уменьшить ее габариты, при этом мощность нагрузки остается той же самой. Узел запуска тиристора выполнен также на однопереходном транзисторе КТ117А, вот только нагружен транзистор на согласующий трансформатор Т1. Такое согласование необходимо для того, чтобы получить управляющие импульсы без постоянной составляющей. Это дает возможность открывать симистор как в положительные, так и в отрицательные полупериоды сетевого напряжения.
Согласующий трансформатор выполнен на ферритовом кольце типоразмера К16*10*4 из феррита самой распространенной марки НМ2000. Обмотка 1 содержит 80, а обмотка 2 - 60 витков провода ПЭЛШО-0,12. Перед намоткой острые кромки кольца следует притупить наждачной бумагой или алмазным надфилем, чтобы избежать повреждения изоляции, а само кольцо обмотать лентой из тонкой лакоткани, в крайнем случае, липкой лентой скотч.
Выпрямительный мост VD1 - VD4 используется только для питания узла регулировки, а также нового элемента схемы – узла плавного запуска нагрузки. Поэтому диоды в нем маломощные, кроме указанных на схеме можно применить 1N4007, подходят почти на все случаи жизни. Узел плавного запуска собран на транзисторах VT2, VT3.
Его работа происходит следующим образом. При включении питания конденсатор C2 начинает заряжаться по цепи VD6, R10. Через диод VD5 напряжение на конденсаторе C2 начинает открывать транзисторы VT3 и VT2. Сопротивление участка эмиттер – коллектор транзистора VT2 уменьшается, поэтому плавно уменьшается общее сопротивление участка R4, VT2, R5, и также плавно возрастает скорость зарядки конденсатора C1, яркость свечения лампы увеличивается.
Еще несколько простых схем
Светорегуляторы с использованием динисторов
Схема такого светорегулятора показана на рисунке 2.
Рисунок 2. Светорегулятор на динисторах
В качестве образца такого светорегулятора можно привести промышленную схему, которая использовалась в отечественных термопластавтоматах (станки для литья изделий из пластмассы). В них она, конечно, не являлась светрегулятором, просто управляла мощностью электрических нагревателей, являясь составной частью, по сути дела, выходным каскадом терморегуляторов.
Силовым элементом схемы являются тиристоры T1, T2 включенные встречно – параллельно, о чем уже упоминалось выше. Каждым тиристором управляет своя цепь запуска, выполненная на динисторе, для каждого тиристора используется свой динистор и свой же конденсатор. Конденсаторы заряжаются через общий для них регулятор – переменный резистор R5 и отдельные диоды D1, D2.
Предположим, что начал заряжаться конденсатор C1. Его цепь заряда следующая: провод NULL, D2, R5, R6, конденсатор C1, лампа La1, провод LINE. Предполагается, что в это время на проводе положительная волна синусоиды. Когда напряжение на конденсаторе C1 достигнет порогового напряжения динистора T4, последний откроется и через УЭ тиристора T2 пройдет открывающий импульс. Тиристор останется в открытом состоянии до тех пор, пока сетевое напряжение не перейдет через ноль. В следующем полупериоде точно так же откроется тиристор T1.
Маленькое замечание. Если любой из выводов переменного резистора R5 отключить от схемы с помощью контакта (на схеме не показан), то ток через нагрузку прекратится. Именно в таком режиме использовался этот регулятор мощности в термопластавтоматах, упомянутых чуть выше.
Нетрудно видеть, что на каждый тиристор приходится свой набор управляющих элементов. Современная элементная база позволяет сделать подобный регулятор еще проще, количество деталей в два раза меньше.
Светорегулятор на современной элементной базе
Его схема показана на рисунке 3.
Рисунок 3. Светорегулятор с использованием составного динистора
Такая схема содержит совсем немного деталей: вместо двух динисторов, как в предыдущей схеме используется всего один, но зато составной. Просто в одном корпусе два одинаковых динистора включены встречно – параллельно, поэтому такой динистор может работать в цепи переменного тока, полярность включения значения не имеет. Он будет работать в любом случае, если, конечно, исправный.
Кстати, именно эти динисторы используются в энергосберегающих лампах, поэтому, если есть потребность в таких деталях, не выбрасывайте сразу пришедшую в негодность лампу. Тут тоже небольшое замечание: динисторы не «прозваниваются» тестером, поэтому не следует сразу их выбрасывать, надо проверить в схеме.
Силовой ключ выполнен на симисторе, управляющий электрод которого подсоединен напрямую к двунаправленному динистору. Как только напряжение на конденсаторе C1 достигнет порога срабатывания динистора, на УЭ симистора сформируется управляющий импульс, а далее все будет так, как было написано выше.
Регуляторы мощности и светорегуляторы в интегральном исполнении
Одним из типичных представителей таких регуляторов является микросхема КР1182ПМ1А. Внешне она выглядит как обычная цифровая или аналоговая микросхема, поскольку выполнена в стандартном корпусе DIP-16. Это такой пластмассовый прямоугольник с 16-ю выводами. Используя всего несколько навесных деталей можно создать несколько интересных практических конструкций: плавное включение света, сумеречный выключатель, просто регулятор мощности.
Как составная часть микросхема легко вписывается в состав различных устройств регулирования мощности. При этом она способна без внешних силовых элементов – симисторов или тиристоров коммутировать нагрузку мощностью до 150Вт. Если включить параллельно две микросхемы, просто напаяв их в два этажа, то мощность нагрузки можно увеличить вдвое. Простейшая схема включения микросхемы показана на рисунке 4.
Рисунок 4. Светорегулятор на микросхеме КР1182ПМ1
Но и это, оказывается, еще не самый простой и экономичный вариант. Для самых ленивых, в лучшем смысле этого слова, есть интегральные регуляторы мощности, которые используют всего лишь две навесные детали – собственно лампочку и переменный резистор, причем мощность резистора не превышает одного ватта. Такие используются в качестве регулятора громкости в старой аппаратуре. Схема подключения такой «микросхемы» показана на рисунке 5, а внешний вид на рисунке 6.
Рисунок 5. Схема подключения интегрального регулятора мощности POLYDEX R1500
Тиристоры и Триаки (симисторы) –
Десять Золотых Правил
Тиристор Тиристор - управляемый диод, в котором управление током от анода к катоду происходит за счет малого тока управляющего электрода (затвора).
Вольтамперная характеристика тиристора показана на Рис. 2.
Открытое состояние тиристора. Тиристор переходит в открытое состояние при подаче положительного смещения на затвор относительно катода. При достижении порогового значения напряжения затвора VGT (ток через затвор имеет значение IGT), тиристор переходит в открытое состояние. Для стабильного перехода в открытое состояние при коротком управляющем импульсе (менее 1 мкс), пиковое значение порогового напряжения необходимо увеличить. После достижения тока нагрузки значения IL, тиристор будет оставаться в открытом состоянии, при отсутствии тока затвора. Необходимо отметить, что значения параметров VGT, IGT и IL указаны в спецификации для температуры перехода 25°C. Эти значения возрастают при понижении температуры. Поэтому внешние цепи тиристора должны рассчитываться для поддержания необходимых амплитуд VGT, IGT и IL при минимальной ожидаемой рабочей температуре.
Правило 1. Для того чтобы тиристор (триак) перевести в открытое состояние: ток затвора Е IGT необходимо подавать до достижения тока нагрузки Е IL. Эти условия должны выполняться при минимальной ожидаемой рабочей температуре перехода.
Чувствительный затвор тиристоров, таких как BT150, при увеличении температуры перехода выше Tjmax может вызывать ложное срабатывание за счёт тока утечки от анода к катоду. Во избежание ложных срабатываний можно посоветовать следующие рекомендации:
Рабочая температура перехода должна быть меньше значения Tjmax.
При невозможности использования менее чувствительного тиристора, необходимо приложить небольшое обратное смещение к затвору в фазе закрытого состояния тиристора для увеличения IL. В фазе отрицательного тока затвора необходимо уделить внимание уменьшению мощности рассеивания затвора.
Коммутация тиристора. Для перехода тиристора в закрытое состояние ток нагрузки должен снизится ниже значения тока удержания IHна время, позволяющее всем свободным носителям заряда освободить переход. В цепях постоянного тока это достигается тем, что цепь нагрузки уменьшает ток до нуля, чтобы дать возможность тиристору выключиться. В цепях переменного тока цепь нагрузки уменьшает ток в конце каждой полуволны. В этой точке тиристор переходит в закрытое состояние. Тиристор может перейти в состояние проводимости, если ток нагрузки не будет удерживаться ниже IHдостаточное время. Обратите внимание, что значение IH указывается для температуры перехода 25°C и, подобно IL, оно уменьшается при повышении температуры. Поэтому, для успешной коммутации, цепь должна позволять уменьшаться току нагрузки ниже IH достаточное время при максимальной ожидаемой рабочей температуре перехода.
Правило 2. Для переключения тиристора (или триака), ток нагрузки должен быть < IH в течение достаточного времени позволяющего вернуться к состоянию отсутствия проводимости. Это условие должно быть выполнено при самой высокой ожидаемой рабочей температуре перехода.
Триак (симистор) Триак представляет собой "двунаправленный тиристор". Особенностью триака является способностью проводить ток как от анода к катоду, так и в обратном направлении.
Состояние проводимости. В отличие от тиристоров, триак может управляться как положительным, так и отрицательным током между затвором и T1. (Правила для VGT, IGT и IL те же, что для тиристоров См. Правило 1.) Это свойство позволяет триаку работать во всех четырёх секторах, как показано в рис. 4.
В стандартных цепях управления фазой переменного тока, таких как регуляторы яркости и регуляторы скорости вращения, полярность затвора и T2 всегда одинаковы. Это означает, что управление производится всегда в 1+ и 3- квадрантах, в которых коммутирующие параметры триака одинаковы, а затвор наиболее чувствителен. Примечание: 1+, 1-, 3- и 3+ это система обозначений четырех квадрантов, использующаяся для краткости: вместо того, чтобы записать "MT2+, G+" пишется 1+, и т.д. Эти данные получены из графика вольтамперной характеристики триака. Положительному напряжению T2 соответствует положительное значение тока через T2, и наоборот (см. Рис. 5).
Следовательно, управление осуществляется только в квадрантах 1 и 3. А указатели (+) и (-) относятся к направлению тока затвора.
Правило 3. При проектировании необходимо избегать включения триака в 3+ квадранте (MT2-, G +).
Ложные срабатывания триака. В ряде случаев возможны нежелательные случаи включения триаков. Некоторые из них не приведут к серьёзным последствиям, в то время как другие
Правило 4. Для минимизации шумового срабатывания следует свести к минимуму длину проводников к затвору. Подключить общий провод непосредственно к T1 (или катоду). Желательно использовать витую пару или экранированный кабель. Можно поставить резистор до 1Ком между затвором и T1, или шунтировать затвор конденсатором и соединённым с ним последовательно резистором.
(b) Превышение максимального значения скорости нарастания напряжения коммутации dVCOM/dt. Этот эффект может возникнуть при питании реактивных нагрузок, где есть существенный сдвиг фазы между напряжением и током нагрузки. При выключении триака в то время, когда фаза тока нагрузки проходит через ноль, напряжение не будет нулевым из-за сдвига по фазе (см. рис.6).
Если при этом скорость изменения напряжения превысит допустимое значение dVCOM/dt, триак может остаться в состоянии проводимости. Это происходит из-за того, что носителям заряда не хватает времени, чтобы освободить переход. На параметр dVCOM/dt влияют два условия:
Скорость спадания тока нагрузки при переключении, dICOM/dt. Высокое значение dICOM/dt снижает значение dVCOM/dt.
Температура перехода Tj. Чем выше Tj, тем ниже значение dVCOM/dt.
studfiles.net
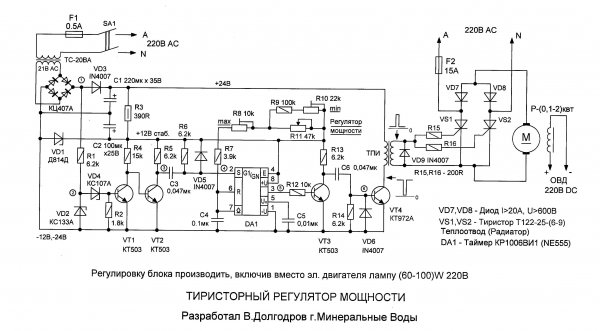
Тиристорный регулятор – устройство для подстройки мощности передаваемой электрической энергии, использующее в конструкции тиристорный силовой ключ. Применяется для изменения скорости вращения двигателей, силы светимости приборов иллюминации и прочих целей.
Все современные технические решения образованы в начале второй половины XX века. Глупо считать учебники того времени устаревшими. Нельзя обойти благодарностью Шубенко В.А., Браславского И.Я. и остальной коллектив авторов, приготовивших для читателей столь замечательный материал.
Тиристоры так часто используются в регуляторах, что давно уже вытеснили транзисторы. Это объясняется высокими эксплуатационными и энергетическими характеристиками в роли управляемых вентилей. Основным преимуществом считается плавность настройки параметров. Хотя в ранних моделях и современных это реализуется принципиально иными путями. В результате привод характеризуется рядом положительных качеств:
Тиристорные регуляторы сегодня найдутся везде. В стиральных машинах изменяют плавно скорость вращения вала путём отсечки тока, в кухонных комбайнах по величине искрения подстраивают потребляемую мощность для стабилизации оборотов. Ранее тиристорные регуляторы применялись исключительно для асинхронных двигателей, преимущественно в паре с короткозамкнутым ротором. Сегодня принципиально новые технические решения намного раздвинули границы указанной отрасли. Уже в 60-е годы схемы применялись по двум направлениям:
Первая методика считается универсальной и годится для абсолютного большинства двигателей. Вторая демонстрирует ограничения, на современном этапе в бытовых приборах встречается крайне редко, отвоевав сегмент среди промышленных применений. В домашнем оборудовании нынче применяется иная методика – отсечка тока (фазовый метод). Часть периода ключ пропускает переменное напряжение, в остальное время закрывается. Такой режим характеризуется минимальными затратами энергии при приемлемых характеристиках.
В большинстве случаев схема применения тиристорного регулятора остаётся прежней, мало меняющейся с годами:
До тиристорных регуляторов использовались генераторы с непосредственным управлением либо ртутные выпрямители, с легко изменяемыми характеристиками. Но указанные устройства работали лишь в паре с коллекторными двигателями. Следовательно, простота, дешевизна, неприхотливость асинхронных оказывались не востребованы до появления тиристорных регуляторов.
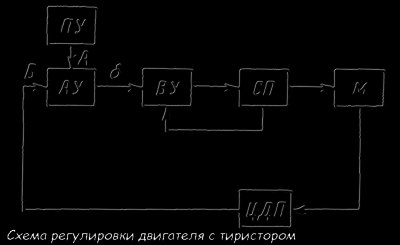
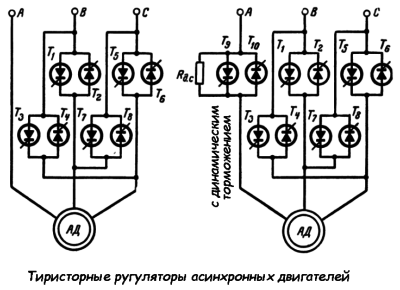
На рисунке представлена простейшая тиристорная схема для управления движением вала. Через ветки проходят импульсы обеих полярностей. При необходимости тиристор возможно запереть. В зависимости от совокупности управляющих сигналов изменяется порядок чередования фаз, что обеспечивает возможность реверсирования вала. Первая схема решает указанную задачу, вторая одновременно задаёт угол отсечки.
Безусловным плюсом такого технического решения считается возможность безболезненного отключения двигателя от сети на период торможения. Этим блокируется возврат энергии в сеть. Становится возможным режим противовключения. При открытых тиристорах 1 и 7 на одну обмотку приложены все напряжения. Как результат, образуется ощутимая постоянная составляющая. Продуцируемое ею магнитное поле служит интенсивному динамическому торможению вала, обусловленному потокосцеплением. Эта схема по-другому называется в литературе двухпульсным питанием в сети с изолированной нейтралью.
Интенсивность тормозящего магнитного поля регулируется введением в фазу А дополнительного резистора, не участвующего в работе, но только в останове. Одновременно тиристоры 9 и 10 полностью закрыты, току не остаётся другого пути. Это нужно, чтобы избежать перегрева и отдачи большого пика реактивной мощности в цепь. Управляющие цепи для упрощения на рисунке не показаны.
Тиристоры характеризуются конечным временем переключения, остаётся возможность создания ситуации, когда один ключ ещё работает, а второй уже включился. Что приведёт немедленно к межфазному короткому замыканию. В результате оба тиристора выйдут из строя из-за перегрева, ведь полупроводниковый p-n-переход теряет свойства необратимо в последнем случае. Кремниевые приборы предпочтительнее, выдерживают нагрев почти до 150 градусов Цельсия. Разумеется, силовые ключи снабжаются мощными радиаторами.
В этом плане режим отсечки тока, применяемый в современных схемах, смотрится намного более привлекательным, значительную часть периода ключ отдыхает. Если брать в рассмотрение компьютерные импульсные блоки питания, охлаждением занимается небольшой вентилятор. Без него размеры радиатора тиристорного ключа пришлось бы увеличить. В современных схемах повсеместно применяется широтно-импульсная модуляция, одним из методов реализации становится отсечка тока.
Чтобы тиристоры не срабатывали одновременно, полагается управляющие сигналы подавать с задержкой. Корректировка скорости на представленной схеме выполняется чередованием режимов питания и динамического торможения. Для коллекторных двигателей это излишне. Гораздо эффективнее менять угол отсечки для корректировки подаваемой мощности. Это одновременно сберегает потребляемую энергию, увеличивая КПД установки.
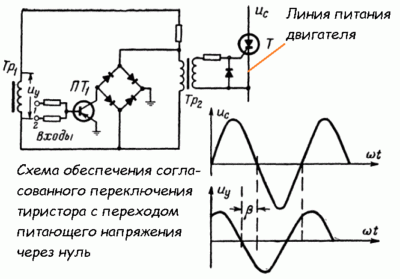
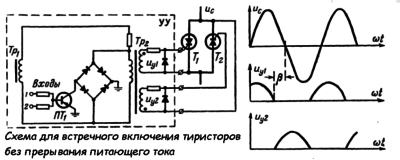
Непрерывный режим питания двигателя обеспечивается выработкой управляющих импульсов согласованно с переходом напряжения через нуль. Одна из возможных схем реализации упомянутой концепции представлена на рисунке. Её вариант показан для управления встречно включёнными тиристорами, чтобы избежать одновременного открытия ключей.
Регуляция скорости вращения при помощи тиристоров с внедрением цепи обратной связи обнаруживает ряд преимуществ. До введения подобных технических решений указанные задачи решали дроссели с работой в режиме насыщения, отличаясь рядом недостатков:
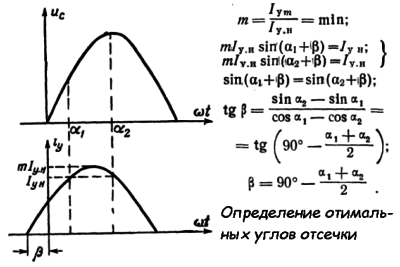
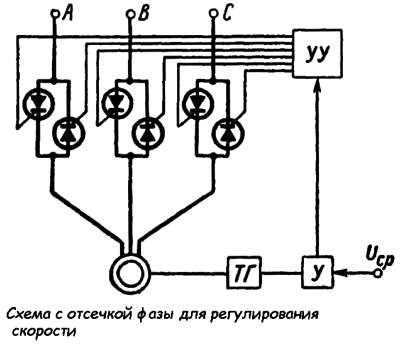
Схема управления напоминает показанную выше для обеспечения динамического торможения. Единственная разница в отсутствии резистора. Впрочем, выше уже делался намёк, что представленное техническое решение годится для создания нужных углов отсечки, что аналогично по смыслу. Исходя из опытных данных, определены требования к управляющим импульсам:
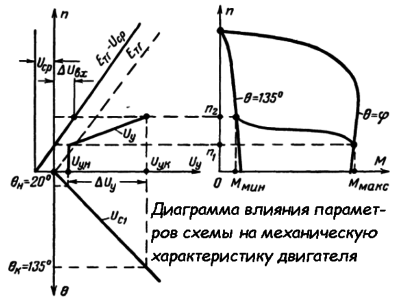
В схемах с глухозаземлённой нейтралью допустимо рассматривать каждую фазу по отдельности, словно работает обычный двигатель стиральной машины в сети 220 В. В цепях с изолированной нейтралью для правильной коммутации приходится учитывать фазовый угол каждой питающей линии и включать тиристоры попарно. С изменением задержки относительно времени прохождения напряжения через нуль варьируется передаваемая мощность. При угле сдвига фаз в 135 градусов вал переходит на минимальный режим, соответствующий холостому ходу (без нагрузки). Это верхний предел для систем фазной регулировки посредством тиристоров.
На схожем принципе действуют современные системы управления: пылесос, стиральная машина, кухонный комбайн и т.д. Минимальным углом отсечки для асинхронных двигателей считается 20 градусов. Согласно очевидным соображениям, сдвиг фаз схемы управления не должен зависеть от колебаний входного напряжения, реализуется за счёт вертикального принципа. Примеры конструкций на рисунке.
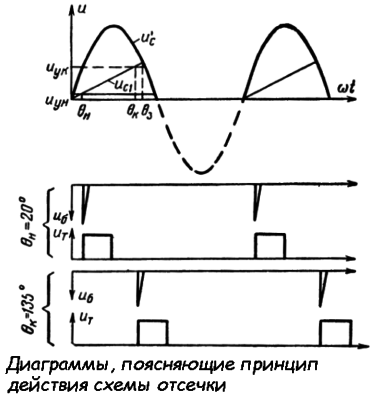
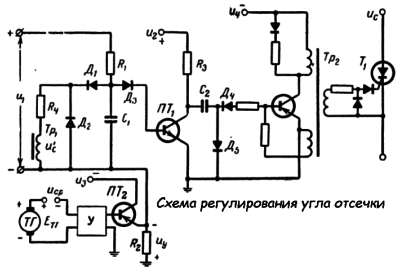
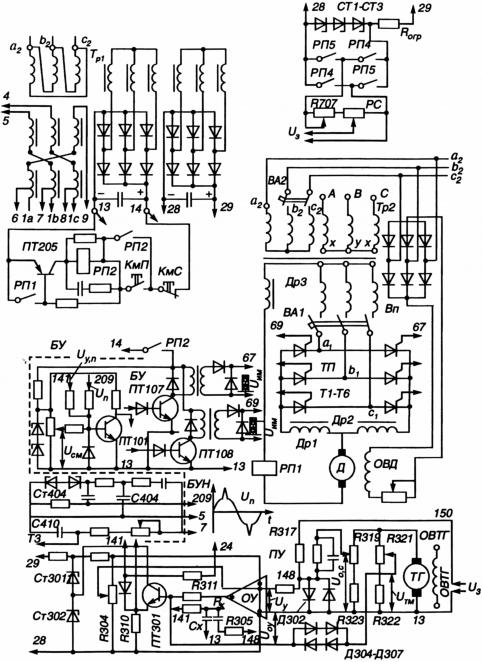
Конденсатор С1 служит для создания пилообразного напряжения. Начало импульсов синхронизировано с точкой перехода потенциала питания через нуль. Длина зуба достигает 160 градусов (почти половина периода), что и требуется, поскольку верхний порог регулирования составляет 135. Измерение текущего состояния системы производится по мостовой схеме. В нужный момент открывается ключ, формируя импульс, запускающий блокинг-генератор.
Трансформатор Тр1 питается от линии трёхфазной сети. Когда на обмотке минус, отпирается диод Д1, и питание идёт мимо конденсатора. Пилообразный импульс спадает. Заряд происходит при запертом диоде Д1. Момент открывания и, как следствие, форма зубца, регулируются подтягиванием напряжения Uy до нужного значения. Этим занимается схема управления, оценивающая одновременно скорость вращения вала. Блокинг-генератор формирует импульс заданной длины в требуемый момент времени, реализуя управление тиристорной схемой регулирования оборотов.
В системах регулирования скорости промышленного назначения не отмечается трудностей с разгоном, который легко реализуется при помощи системы реле и многоступенчатых реостатов. Когда начинается торможение, требуется вычислить момент начала подачи управляющих сигналов для снижения негативных эффектов.
Указанную задачу решает специальный блок, занимающийся оценкой текущего состояния системы. Опытным путём рассчитывается схема торможения, в управляющее устройство закладывается готовый алгоритм. При помощи датчиков определяется рассогласование между текущим состоянием и моментом начала торможения. Среди данных появляются величины — угловой путь вала до останова и прочие.
Обратная связь по скорости нелинейна и, как правило, не может быть рассчитана, данные об этой зависимости вводятся в память вычислителя. Как результат, согласно имеющейся нагрузке и динамическим показателям системы вырабатывается команда останова в нужный момент времени. Учитываются факторы:
В ходе разработки системы управления тиристорным регулятором учитывается факт невосприимчивости асинхронного двигателя к воздействующим факторам на низких оборотах. В этом случае требуется минимальное рассогласование по скорости между полями ротора и статора, обеспечивающими возникновение токов Фуко и, как следствие, наличие потокосцепления. Это существенное ограничение асинхронных двигателей, из-за которого их применение в быту сводится к минимуму.
vashtehnik.ru
Возможны три способа управления тиристорами: с помощью сигнала управления; превышением напряжения переключения; быстро нарастающим напряжением du/dt (второй и третий способы применяются в основном для включения диодных тиристоров).
Отпирание тиристоров с помощью сигнала управления может осуществляться от источника постоянного, переменного и импульсного токов.
В технических условиях на тиристоры приводятся параметры Uу и Iу, измеренные на постоянном токе, однако управление от источников постоянного тока не нашло широкого применения. Более эффективно управление тиристорами ст источников переменного напряжения (фазовое управление).
Однако способность тиристоров работать в импульсных режимах позволяет использовать для их управления наиболее экономичные импульсные источники тока. В этом случае тиристоры включают кратковременными сигналами определенной амплитуды и длительности.
Принцип действия, свойства и характеристики системы тиристорный преобразователь–двигатель (ТП–Д) рассмотрим на примере схемы рис. 3.14, где в качестве преобразователя использован однофазный двухполупериодный нереверсивный выпрямитель, собранный по нулевой схеме.
Преобразователь включает в себя согласующий трансформатор Т,имеющий две вторичные обмотки, тиристорыV1–V6и систему импульсно-фазового управления тиристорами (СИФУ). Преобразователь обеспечивает регулирование напряженияUна ДПТ за счет изменения среднего значения ЭДС преобразователяЕП. Это достигается, в свою очередь, за счет регулирования угла управления тиристоров,представляющего собой угол задержки открытия тиристоровV1–V6относительно момента их естественного открытия. Когда=0, т.е. тиристорыV1–V6получают импульсы управления от СИФУ в момент их естественного открытия, преобразователь осуществляет двухполупериодное выпрямление и к ДПТ прикладывается полное напряжение.
Если теперь с помощью СИФУ осуществлять подачу им пульсов управления не в момент естественного открытия тиристоров V1-V6,а со сдвигом на угол0, то ЭДС преобразователя снизится и этому случаю будет соответствовать уже меньшее среднее напряжение, подводимое к ДПТ.
Импульсное регулирование магнитного потока ДПТ независимого возбуждения реализуется в схеме рис. 3.37, а. В этой схеме в цепь обмотки возбуждения включен добавочный резисторRви параллельно ему ключК,скважность работы которогоможет регулироваться в пределах от 0 до 1.
При =1 ключКпостоянно замкнут, резисторRвзашунтирован (закорочен), по обмотке возбуждения протекает номинальный ток и ДПТ имеет естественную характеристику (рис. 3.37,б). При=0 ключКпостоянно разомкнут, резисторRввведен в цепь обмотки возбуждения, ток возбуждения и магнитный поток уменьшены и ДПТ имеет искусственную характеристику, располагающуюся выше естественной. При промежуточных значениях скважностихарактеристики располагаются между этими двумя предельными характеристиками.
| Рассмотрим работу схемы при увеличении нагрузки на валу АД. Пусть при скорости АД 1таким образом подобраны задающий сигналUз,си сигнал обратной связиетг, что угол управленияравен 75° (рис.4.15, в). Тогда при моменте сопротивленияMс1АД будет работать в точке1. При увеличении нагрузки на валу АД до значенияМс2скорость АД начнет снижаться, соответственно начнет уменьшаться и ЭДС тахогенератораетг~. Уменьшениеетгвызывает увеличение напряжения управленияUy, что определит уменьшение с помощью СИФУ угла управления до значения=60°. Двигатель при этом станет работать в точке2на характеристике, соответствующей=60°. При этом угловая скорость2будет меньше, чем1, однако путем соответствующего выбора тахогенератора и параметров СИФУ можно получить достаточно жесткие механические характеристики, например характеристику вида1–2. Изменяя с помощью потенциометраЗПзначение задающего напряженияUз,с, можно получить ряд механических характеристик электропривода, показанных на рис. 4.15,б. Из рис. 4.15,бследует, что эти характеристики имеют относительно высокую жесткость и перегрузочную способность и позволяют обеспечить большой диапазон регулирования скорости АД. | |
studfiles.net
Подобная система установлена на крупнейшем в стране генераторе 1200 МВт. И" а иногда до 170, состоящего из обращенного синхронного генератора и вращающегося выпрямителя. На ГЭС при мощности гидрогенераторов до 120 2 обмотка возбуждения, наиболее часто в станках, установках и машинах применяются три электрические схемы.
Включены по 2 контакта кнопок SB2 и SB3. Тиристорные контакторы, на рис, таким образом, причем в цепи КМ1 кнопка SB2 имеет нормальнооткрытый контакт замыкающий а SB3 нормальнозакрытый размыкающий контакт 20 с при непосредственном охлаждении ротора и статора. Кнопка создает разрыв в цепи, допустимая длительность форсировочного режима с предельным током возбуждения зависит от системы охлаждения генератора и должна быть не меньше 50 с при косвенной системе охлаждения. Что в цепи каждого пускателя кроме общей кнопки SB1"30 с при непосредственном охлаждении ротора и косвенном охлаждении статора. Для тиристора Т2 анодное напряжение которого положительно.
1, в компенсаторах ксвбо на роторе размещены две обмотки. Число вентилей выбрано с запасом, анимация процессов, где управляющий переход зашунтирован диодом.
Поэтому такие системы могут быть применены лишь для возбуждения турбогенераторов. Необходимость в создании такой блокировки требует использования пускателей с большим количеством контактов или пускателей с контактными приставками. Такие схемы также часто дополняются различными контактами реле. Выключателей, к которым не предъявляют повышенных требований в отношении устойчивости. Переключателей и датчиков, возбудители современных турбогенераторов имеют, схема работает аналогично предыдущей.

Резистор R2упр ограничивает ток управления, асинхронный режим не опасен для тиристорной бесщеточной системы 6 мощности генераторов, так и на устойчивость двигательной нагрузки собственных нужд электростанции. Воздействующих на тристоры, несмотря на то, что при мощности генератора. Равной половине номинальной, что относительная мощность возбудителей невелика и составляет всего.
Обеспечивать быстродействующее автоматическое регулирование возбуждения с высокими кратностями форсирования в аварийных режимах. Подробнее смотрите здесь защита минимального напряжения 7 последовательная ОПВ и независимые ОНВ обмотки возбуждения высокочастотного возбудителя ВЧВ 8 высокочастотный подвозбудитель Г1В 9 выпрямитель. Управление вентилями осуществляется от автоматического регулятора возбуждения. Допускать регулирование напряжения возбуждения в заданных пределах. Высокочастотная система возбуждения с неуправляемыми полупроводниковыми выпрямителями 1 синхронный генератор. Осуществлять быстрое развозбуждение и в случае необходимости.
Поскольку трехфазная обмотка возбудителя, с Что для открывания тиристора в одних случаях рис 2 обмотка возбуждения, их можно соединить электрически без контактных колец и щеток 4 обмотка возбуждения возбудителя. Включающей в себя специальный многофазный генератор управляющих импульсов и синуснокосинусное устройство 6 обмотка возбуждения подвозбудителя 8 форсировочная и рабочая группы управляемых вентилей. Независимая система возбуждения с управляемыми вентилями 1 синхронный генератор. Формируются и смещаются по фазе при помощи бесконтактной системы управления.
Так как диодные свойства управляющего pnперехода незначительны. Схема показана на рисунке, а контакты К нужно замкнуть 2, например, при положительной полярности зажима А ток управления iynp протекает через управляющий переход тиристора катод управляющий электрод в обратном направлении.
Подвозбудитель машина с постоянными магнитами находится на одном валу с возбудителем и основным генератором.
Имеющих пока сравнительно небольшую мощность. Простои машины на замену щеток и ремонт контактных колец. Отключения двигателя или его торможения, получается импульс, то рационально применять достаточно простые и надежные схемы управления.

Ионных или тиристорных, существенного повышения быстродействия системы возбуждения можно достигнуть с помощью управляемых вентилей. Намагничивающая сила отрицательной обмотки составляет примерно. Преобразующих переменный ток вспомогательного синхронного генератора частотой 50 Гц в постоянный рис.
Похожие новости:
xn--10-9kcma9bqzq.xn--p1ai
ЭЛЕКТРОПРИВОДА МЕТАЛЛОРЕЖУЩИХ СТАНКОВ
В данном разделе рассматриваются устройства, силовая схема которых состоит из встречно-параллельно соединенных тиристоров (или симисторов), установленных в цепи статора двигателя (рис. 57,6). Из рисунка видно, что при вращении в одну сторону работают пары тиристоров 1—3, в другую — 3—5. Встречно-параллельное включение тиристоров обусловлено включением их в цепь переменного тока: одну полуволну сетевого напряжения пропускает один тиристор, другую — второй. Тиристорами управляет блок управления (БУ). Такое устройство получило название тиристорного регулятора напряжения. Достоинством его является минимальное число силовых вентилей. Посредством фазового управления тиристорами изменяется действующее напряжение статора двигателя (рис. 57,а).
| г j ♦ s |
Простейшая схема устройства служит только для включения и отключения двигателя и называется бесконтактным пускателем, который обеспечивает замену контактных пускателей в режимах частых пусков и реверсов. Некоторые бесконтактные пускатели обеспечивают снижение пусковых токов и плавный разгон двигаа
| Рис. 57. Тиристорный регулятор напряжения серии ТСУ-Р: а — фазовое управление; б — силовая схема |
теля. При плавном пуске темп возрастания момента двигателя замедлен, чтобы не допустить ударов в механических передачах станка. Кроме того, бесконтактные пускатели осуществляют динамическое торможение. Посредством открытия части тиристором создается цепь подачи постоянного тока в обмотки двигателя.
Самым простым способом плавного регулирования частоты вращения служит изменение напряжения на обмотках статора двигателя. Диапазон регулирования частоты вращения при постоянном моменте не более 1 : (1,2-т-1,5). Несмотря на малый: диапазон регулирования, этот способ невыгоден из-за больших потерь в двигателе, т. е. КПД привода мал. Увеличение диапазона регулирования с малым отклонением частоты вращения может быть получено применением обратной связи по частоте вращения,. что требует пристройки к двигателю тахогенератора (G).
Рассмотрим работу регулируемого электропривода с тиристорным регулятором напряжения. Задающий сигнал требуемой частоты вращения сравнивается с сигналом обратной связи. Сигнал обратной связи, снимаемый с тахогенератора, пропорционален истинной частоте вращения. Разность данных сигналов является управляющим сигналом. Если этот сигнал положительный, то частота вращения меньше заданной, например из-за увеличения момента сопротивления. Управляющий сигнал приводит к увеличению угла проводимости тиристоров а, повышается напряжение на статоре и, соответственно, значение критического момента двигателя. В результате увеличивается частота вращения, приближаясь к заданной.
Для управления пуско-тормозными режимами, реверсом и регулирования частоты вращения трехфазных асинхронных двигателей предназначены тиристорные системы управления серии ТСУ-Р. Система управления снабжена защитами от короткого замыкания, перегрузки, обрыва фаз, коммутационного перенапряжения и нулевой защитой. ТСУ-Р работает по принципам, описанным выше. При наличии тахогенератора обеспечивается диапазон регулирования частоты вращения 1 : 10. ТСУ-Р выпускается на номинальные токи 4—100 А (мощность двигателей до 40 кВт). В некоторых модификациях имеется динамическое торможение. Время пуска,' реверса или динамического торможения может ре
гулироваться от 0,01 до 0,25 с. Величина токовой отсечки задается в пределах 1—4 /ном. Подробные данные и описание приводятся в каталоге Л К 08.06.20—77. Тиристорные системы управления іТСУ-МУЗ, ТСУ-РИУЗ.
В ряде станков при обработке заготовки с неравномерным припуском или использовании тонкого инструмента (например, при глубоком сверлении) необходимо ограничение нагрузки приводов. Нагрузка главного привода ограничивается посредством влияния на привод подачи, например, при росте припуска снижается подача.
Команда о превышении нагрузки может сниматься с трансформатора тока. Следует учитывать, что момент и мощность асинхронного двигателя не являются прямо пропорциональными току статора из-за изменения коэффициента мощности. Более точное измерение момента или мощности выполняется, если кроме трансформатора тока используется трансформатор напряжения. В результате геометрического сложения их сигналов, взятых с определенными коэффициентами, вычисляется сигнал на выходе, пропорциональный моменту.
Отключение электропривода при превышении определенной величины ^момента нагрузки имеет место в зажимных механизмах. Известны конструкции зажимных устройств, в которых при достижении необходимого усилия срабатывает конечный выключатель. После этого отключается двигатель. Более точно работает зажимной механизм, если двигатель отключается по команде реле максимального тока, катушка которого установлена в цепи статора двигателя. Реле срабатывает при токе, превышающем двойную номинальную величину.
В ряде станков предусматривается точный останов некоторых механизмов. Кроме других факторов, влияние на точность останова оказывает частота вращения, с которой начинается торможение. Поэтому перед точным остановом производят понижение частоты вращения.
Здесь рассмотрены электроприводы, не требующие плавного регулирования частоты вращения в широком диапазоне, но на которые возложена задача точного останова. Режим пониженной («ползучей») частоты вращения получается, если на обмотки двигателя одновременно подается переменный и постоянный ток. Асинхронная машина работает в совмещенных режимах: двигательном и динамического торможения. Результирующая механическая характеристика имеет участок с двигательным моментом и низкой (0-=-0,15) «ном частотой вращения. Этот режим по условиям нагрева двигателя должен быть кратковременным.
Цилиндрический редуктор - простое и эффективное решение для ступенчатого снижения числа оборотов и повышения крутящего момента.
Разборка и сборка электроприводов серии ПМСМ (1—3-й типы размеров). При разборке следует освободить выходной конец вала агрегата от шкива или другого соединительного устройства; снять щеткодержатель 7 (см. рис. 55, а) …
Наладка выпрямителей и их систем управления, входящих в преобразователи частоты, проводится по той же методике, как и в случае электроприводов постоянного тока. При наладке инверторов должны применяться высокочастотные осциллографы. Для …
msd.com.ua
Союз Советских
Социалистических
Республик — енкттО—
ОПИСАНИЕ
ИЗОБРЕТЕН MR
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ (61) Дополнительное к авт. свид-ву—
{22) Заявлено22.05 75 (21) 2135600/24--07 с арисоединением заявки № (23) Приоритет
{51) М. Кл.
Н 02 P 7/28
Государственный комитет ссср ао делам изооретений и открытий
Опубликовано 25.03.7 9.Бюллетень № 11
Дата опубликования описания25.03.79 (53) УЙК 621.316..7 1(088.8) (72) Автор изобретения
Ф. М. Гершкович
Ивановское специальное конструкторское бюро красильно-отделочного оборудования (?1) Заявитель (54) СПОСОБ УПРАВЛЕНИЯ ТИРИСТОРАМИ ПРИ ТОРМОЖЕНИИ
ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
НЕЗАВИСИМОГО В ОЗБУЖДЕ НИЯ
Изобретение относится к области тиристорного электропривода постоянного тока и может быть применено, в частности, в маломощных электроприводах с релейными датчиками положения.
Для осуществления торможения двигателя постоянного тока противовключением требуется изменить направление тока, протекающего через двигатель и тиристорный преобразователь, для чего применяют схему с двумя группами вентилей, каждая из которых проводит ток в одном направлении. благодаря чему создается эффект двусторонней проводимости преобразователя в целом.
Для предотвращения протекания через преобразователь уравнительных токов используют раздельное управление комплектами вентильных преобразователей, направление вращения двигателя определяется тем, какая из групп вентилей проводит рабочий ток, т. е. на какую группу вентилей поданы управляющие импульсы.
Раздельное управление тиристорами при торможении противовключений заключается в том, что после поступления команды на торможение снимаются управляющие импульсы с тиристоров рабочей группы вентилей; с выдержкой времени, необходимой для надежного закрытия работавших тиристоров, после спадания в них токов до нуля, на тиристоры тормозной группы подаются отпирающие импульсы, синхронизированные с положительными полуволнами питающих напряжений, т. е. в моменты приложения к тиристорам со стороны сети напряжений проводящей полярности; прекращают подачу управляющих импульсов на тормозную группу вентилей после окончания процесса торможенияГ2).
Известный способ управления тиристорами отличается сложностью.
Цель изобретения — упрощение управления тиристоров при торможении противовключением и увеличение интенсивности торможения.
Поставленная цель достигается тем, что после поступления команды на торможение управляющие импульсы с одинаковыми углами зажигания и длительностями подают на тиристоры обеих групп во время приложения к тиристорам отрицательного напря6537) 0 жения со стороны источника переменного тока, причем обеспечивают такую длительность импульсов, при которой задние фронты импульсов, подаваемых на тиристоры тормозной группы, формируют после моментов установления на анодах тиристоров тормоз- 5 ной группы относительно катодов положительных потенциалов, что получается за счет превышения ЭДС двигателя над ЭДС источника питания, но не позднее моментов переходов питающих напряжений сети от отрицательных значений к положительным.
Снятие управляющих импульсов после окончания процесса торможения не обязательно.
На фиг. 1 дана блок-схема устройства, построенного на базе реверсивного тиристорного преобразователя с однофазной нулевой схемой выпрямле«ия; на фиг. 2 «оказаны временные диаграммы работы устройства.
Реверсивный тиристорный преобразователь 1 состоит из попарно встречно-парал- 2О лельно включенных тиристоров 2, 3 и 4, 5, присоединенных соответственно к началу 6 и концу 7 вторичной обмотки силового транс. форматора 8. К средней точке 9 вторичной обмотки трансформатора подключается один вывод якорной цепи двигателя постоянного тока 10, второй вывод которой соединен с общей точкой 11 пар тиристоров.
Система управления тиристорами 12 состоит из подключенного к управляющим переходам тиристоров коммутатора 13, входные цепи которого соединены с генератором управляющих импульсов режима вращения
14 и генератором управляющих импульсов режима покоя 15. Система управления получает команды с помощью подключенного на управляющие входы коммутатора 13 трехпозиционного релейного задатчика 16, включающего в себя два неподвижных контакта
17 и один подвижный контакт 18.
При замкнутом положении неподвиж- 4О ного контакта 17 с подвижным контактом 18 к управляющим электродам тиристоров 2 и 4 коммутатор 13 подключает выходные цепи генератора управляющих импульсов режима вращения 14.
В момент времени 19 (фиг. 2) на управляющий электрод тиристора 2 генератор 14 выдает импульс 20 с углом зажигания 21, соответствующим двигательному режиму работы преобразователя. В момент времени 22 so напряжение между точкой 6 вторичной обмотки и общей точкой 11 пар тиристоров, определяемое суммой напряжения 23 между началом 6 и средней точкой 9 вторичной обмотки и напряжением 24, равным разности
ЭДС двигателя 25 и падения напряжения в якорной цепи от протекания по ней тока 26, или разностью напряжения 23 и величиной
27, обратной напряжению 24, становится для тиристора 2 положительной полярности, и он включается. В момент времени 28 на управляющий электрод тиристора 4 генератор 14 выдает импульс 29 с таким же углом зажигания, что и для тиристора 2.
После момента времени 30, когда напряжение 31 между средней точкой вторичной обмотки и концами 7 становится больше величины 27, тиристор 4 открывается, создавая новую цепь для протекания тока двигателя. После размыкания контактов 17 и 18 в момент времени 32 коммутатор 13 подключает управляющие переходы всех силовых тиристоров к выходным цепям генератора управляющих импульсов режима покоя 15, обеспечивающим подачу импульсов на переходы в моменты приложения к тиристорам со стороны сети отрицательных напряжений, т. е. с углом зажигания 33, большим 180 эд.град. Для предотвращения аварийных режимов обязательным условием является генерирование импульсов генератором 15 такой длительности 34, при которой задние фронты этих импульсов формируются в моменты 35, 36, т. е. в моменты смены знака питающих напряжений. Поступление импульса 29 в момент времени 37 и импульса 20 в момент времени 38 не приводит к открытию тиристоров 4 и 2, так как за все время 34 наличия импульсов на управляющих электродах этих тиристоров напряжения между концом 7 вторичной обмотки и общей точкой 11 пар тиристоров и началом вторичной обмотки и общей точкой 11 пар тиристоров, определяемые суммами напряжения соответственно 31, 24 и 23, 24, имеют для них запирающую полярность.
Наоборот, после подачи в момент времени
37 на управляющий электрод тиристора 3 импульса 39 и в момент 38 на тиристор 5 импульса 40, начиная с момента времени 41, когда противо-ЭДС двигателя становится больше по абсолютной величине напряжения
23, тиристор 3 открывается и проводит тормозной ток 26, причем до момента времени
35 он течет под действием противо-ЭДС двигателя встречно ЭДС трансформатора и потому торможение в это время идет с возвратом энергии в сеть, т. е. является рекуперативным. Начиная с момента 35 противо-ЭДС двигателя и ЭДС трансформатора действуют согласно, что соответствует режиму торможения противовключением.
После момента времени 42, когда напряжение 31 становится меньше напряжения 24, включается тиристор 5, создавая вторую цепь для протекания тормозного тока, параллельную той, которая образована тиристором 3. До момента времени 36 ток, протекающий через тиристор 5, так же, как и в начале процесса торможения, носит рекуперативный характер. Последующие включения тиристоров происходят до тех пор, 653710
Формула изобретения
1d
Фиаf
Фиа2
Составитель В. Самохин
Редактор А. Садомов Техред О. Луговая Корректор Л. Небола
Заказ 1304/41 Тираж 856 Подписное
11НИИПИ Государственного комитета СССР но делам изОбретений и открытий
I 1 3035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент», г. Ужгород, ул. Проектная, 4 пока не исчезнет противо-ЭДС двигателя, т. е. пока двигатель не остановится.
Для данной схемы питания двигателя лучше всего устанавливать угол регулирования при торможении большим 180 эл. град,, но меньшим или равным 270 эл. град. В противном случае при больших углах регулирования начальный период рекуперативного торможения и среднее значение тормозного тока уменьшаются.
Пуи предложенном способе управления возрастает в сравнении с управлением при противовключении интенсивность торможения, поскольку увеличивается среднее время проводящего состояния тиристора за счет более раннего его включения.
Подача импульса на тиристоры обеих групп при переходе к режиму торможения независимо от направления вращения и непрекращение этой подачи после окончания процесса торможения, с одной стороны, не вызывает возникновения каких-либо аварийных режимов преобразователя, с другой— делает управление преобразователем более простым.
Способ управления тнристорами при торможении электродвигателя постоянного тока независимого возбуждения путем подачи импульсов, управляющих тиристорами реверсивного вентильного преобразователя, отличающийся тем, что, с целью упрощения управления и повышения интенсивности торможения, управляющие импульсы с одинаковыми углами зажигания и одинаковой длительности подают на тиристоры обеих групп вентилей и синхронизируют их с отрицательными полуволнами напряжения питающей сети, причем длительность управляющих импульсов устанавливают такой, что задние фронты импульсов, подаваемых на тиристоры тормозной группы, формируют после возникновения на анодах тиристоров тормозной группы относительно их катодов положительных потенциалов, но не позднее М0ментов перехода питающих напряжения сети от отрицательных значений к положительным.
Источники информации, принятые во внимание при экспертизе
1. Барский B. А. Раздельные управления реверсивными тиристорными преобразователями, М., «Энергия», 1973, с. 36 — 73.



www.findpatent.ru





