Никола Тесла был, без сомнения, гениальным изобретателем. Он оставил свой след в истории множества различных компаний, которые пользуются его наработками. Мы представляем вам 10 самых знаменитых изобретений великого серба.
1. Катушка Тесла
Все наверняка видели знаменитые катушки Тесла. Они представляют собой башню с катушкой на вершине, которая позволяет получать молнии из воздуха. Конденсаторы хранят и наращивают энергию, после чего с помощью искры выпускают ее в воздух, тем самым создавая молнии. Катушки стоят в различных музеях и научных центрах. Их используют как для развлечения посетителей, так и для различных тестов.
2. Увеличительный передатчик энергии
Идеей фикс Николы Тесла была возможность беспроводной передачи электроэнергии на большие расстояния. Те самые катушки были лишь частью этой системы. Для подтверждения своих теорий, изобретатель соорудил две огромные башни с катушками на вершинах и смог передать электрический импульс на расстояние 130 футов. Тесла очень сильно опередил свое время, поскольку беспроводная передача энергии не была актуальной вплоть до 2010 года. Сейчас работы в этом направлении ведутся в различных уголках земного шара.
3. Турбина Тесла
Тесла считал развитие поршневых двигателей в автомобильной промышленности путем к значительным изменениям в мире. Он соорудил собственную турбину двигателя, в которой использовалось горение для вращения дисков. Эффективность использования топлива в таком двигателе достигала 60%, что является грандиозных достижением. К слову, в современных двигателях эффективность составляет всего 42%.
4. Тенеграф
В то время как Рентгену приписывают разработку первых рентгеновских пленок, существуют доказательства, что Тесла мог создать их первым. Однако, многие его наработки погибли при пожаре в лаборатории. Говорят, что Тесла взял наработки Рентгена и улучшил их, получив самый яркий рентгеновский луч из когда-либо существовавших.
5. Радио
Перед тем, как случился пожар в его лаборатории, Тесла занимался разработкой радио. Он собирался передать сигнал на 50 миль. Однако, пока он восстанавливал свои наработки после пожара, итальянец Маркони в Англии получил патент на радио. Радио Теслы было бы в несколько раз совершеннее, если бы ему удалось использовать его.
6. Неоновая лампа
Тесла не разрабатывал люминисцентные или неоновые огни, а лишь способствовал совершенствованию этих изобретений. Он создал первый в мире неоновых знак, который был показан в 1893 году на Всемирной выставке в Чикаго. Именно благодаря Тесле, вы всегда сможете безошибочно найти свой любимый бар.
7. Трансформаторная подстанция на Ниагарском водопаде
Когда дошло дело до строительства подстанции на Ниагарском водопаде в числе первых рассматривались работы Томаса Эдиссона в этой области. Однако, когда компания Westinghouse Electric ознакомилась с работами Теслы, то выбор пал на него. Как показывает история, система Теслы работала как часы и в настоящее время является стандартом для гидроэнергетики.
8. Индукционный двигатель
Один из примеров, когда идя ноздря в ноздрю Тесла смог опередить своих конкурентов. Когда компания Ferrari представила свой индукционный двигатель, Тесла уже успел запатентовать собственное изобретение. Двигатель использует электромагниты для вращения. Даже сегодня он используется в пылесосах, фенах и различных электроинструментах.
9. Радиоуправляемая лодка
Телеавтоматон была первой радиоуправляемой лодкой, разработанной Тесла. Однако,ему отказали в выдаче патента на изобретение, мотивировав это тем, что создать подобное в принципе невозможно. Правда Тесла доказал обратное, продемонстрировав свою лодку на электрической выставке 1898 года. Телеавтоматон можно считать прадедушкой современных беспилотных аппаратов.
10. Переменный ток
Переменный ток считается венцом творения Теслы. Не будучи его изобретателем, он сделал его легким в использовании и дал широкое распространение. Переменный ток позволяет более эффективно передавать электричество на расстояние. Компания Westinghouse купила патенты Теслы на переменный ток и использовала из в конкурсе на освещение Всемирной выставки в Чикаго. Они выиграли контракт, который позволял обеспечить электричеством выставку всего за 150 000 долларов, что было в несколько раз дешевле, чем при использовании постоянного тока.
www.ippro.ru
Большинство двигателей переменного тока являются асинхронными двигателями. Асинхронные двигатели предпочитают благодаря своей прочности и простоте. Фактически, 90% промышленных двигателей являются асинхронными двигателями.
Никола Тесла задумал основные принципы многофазного асинхронного двигателя в 1883 году и к 1888 году имел модель с мощностью в два раза (400 Вт). Тесла продал права на производство Джорджу Вестнингхаусу за 65 000 долларов.
Наиболее крупные (> 1 л.с. или 1 кВт) промышленные двигатели - это полифазные асинхронные двигатели . Под полифазой мы подразумеваем, что статор содержит несколько различных обмоток на полюс двигателя, приводимый в действие соответствующими сдвинутыми во времени синусоидальными волнами. На практике это две или три фазы. Крупные промышленные двигатели трехфазные. Хотя для простоты мы приводим многочисленные иллюстрации двухфазных двигателей, мы должны подчеркнуть, что почти все полифазные двигатели являются трехфазными. Под асинхронным двигателем мы подразумеваем, что обмотки статора индуцируют ток в проводниках ротора, например, трансформатор, в отличие от мостового электродвигателя постоянного тока.
Асинхронный двигатель состоит из ротора, известного как арматура, и статора, содержащего обмотки, соединенные с полифазным источником энергии, как показано на рисунке ниже . Простой двухфазный асинхронный двигатель ниже похож на двигатель мощностью 1/2 л.с., который Никола Тесла представил в 1888 году.
Многофазный асинхронный двигатель Тесла.
Статор на рисунке выше намотан парами катушек, соответствующими фазам доступной электрической энергии. Статор 2-фазного асинхронного двигателя выше имеет 2 пары катушек, одну пару для каждой из двух фаз переменного тока. Отдельные катушки пары соединены последовательно и соответствуют противоположным полюсам электромагнита. То есть одна катушка соответствует N-полюсу, а другая - S-полюсу, пока фаза переменного тока не изменит полярность. Другая пара катушек ориентирована на 90 o в пространстве до первой пары. Эта пара катушек подключается к переменному, сдвинутому по времени на 90 o в случае двухфазного двигателя. Во времена Теслы источником двух фаз переменного тока был двухфазный генератор переменного тока.
Статор на рисунке выше имеет характерные , очевидные выступающие полюса, используемые на раннем асинхронном двигателе Теслы. Эта конструкция используется и по сей день для двигателей дробных лошадиных сил (<50 Вт). Тем не менее, для более крупных двигателей меньшая пульсация крутящего момента и более высокая эффективность приводят к тому, что катушки встроены в щели, разрезанные на слои статора. (Рисунок ниже )
Рама статора с прорезью для обмоток.
Пластины статора представляют собой тонкие изолированные кольца с прорезями, пробитыми из листов из электротехнической стали. Стопка из них крепится торцевыми винтами, которые также могут удерживать торцевые корпуса.
Статор с (a) 2-φ и (b) 3-φ обмотками.
На рисунке выше в пазах статора установлены обмотки как для двухфазного двигателя, так и для трехфазного двигателя. Катушки намотаны на внешнее приспособление, затем пробиваются в прорези. Изоляция, заключенная между периферией катушки и слотом, защищает от истирания.
Фактические обмотки статора более сложны, чем одиночные обмотки на полюс на рисунке выше . Сравнивая двигатель 2-φ с двигателем 2-φ Теслы с выступающими полюсами, количество катушек одинаково. В реальных больших двигателях обмотка полюсов делится на одинаковые катушки, вставленные во многие более мелкие слоты, чем указано выше. Эта группа называется фазовым поясом . См. Рисунок ниже . Распределенные катушки фазового пояса отменяют некоторые нечетные гармоники, создавая большее синусоидальное распределение магнитного поля по полюсу. Это показано в секции синхронного двигателя. Слоты на краю полюса могут иметь меньше оборотов, чем другие слоты. Кромки могут содержать обмотки двух фаз. То есть фазовые ленты перекрываются.
Ключом к популярности асинхронного двигателя переменного тока является простота, о чем свидетельствует простой ротор (рисунок ниже ). Ротор состоит из вала, стального ламинированного ротора и встроенной медной или алюминиевой белой клетки , показанной на (b), удаленной из ротора. По сравнению с арматурой двигателя постоянного тока, нет коммутатора. Это устраняет щеточки, искрение, искрение, графитную пыль, регулировку и замену кисти, а также повторную обработку коммутатора.
Ламинированный ротор с (а) внедренной белой клеткой, (б) проводящая клетка удалена с ротора.
Проводники с короткозамкнутым сердечником могут быть перекошены, скручены, соответственно, с валом. Несогласование с помощью щелей статора уменьшает пульсации крутящего момента.
Как сердечники ротора, так и статора состоят из стека изолированных пластин. Слои покрыты изоляционным оксидом или лаком для минимизации потерь вихревых токов. Сплав, используемый в ламинатах, выбирается для низких гистерезисных потерь.
Коротким объяснением операции является то, что статор создает вращающееся магнитное поле, которое тянет ротор вокруг.
Теория работы асинхронных двигателей основана на вращающемся магнитном поле. Одним из способов создания вращающегося магнитного поля является поворот постоянного магнита, как показано на рисунке ниже . Если движущиеся магнитные линии потока разрезают проводящий диск, он будет следовать за движением магнита. Линии потока, режущие проводник, будут индуцировать напряжение и последующий ток в проводящем диске. Этот поток тока создает электромагнит, полярность которого противоречит движению закона постоянных магнитов - Ленца . Полярность электромагнита такова, что он тянется против постоянного магнита. Диск следует с меньшей скоростью, чем постоянный магнит.
Вращающееся магнитное поле создает крутящий момент в проводящем диске.
Крутящий момент, создаваемый диском, пропорционален количеству линий потока, режущих диск, и скорости, с которой он режет диск. Если бы диск вращался с той же скоростью, что и постоянный магнит, не было бы потока, режущего диск, никакого индуцированного тока, без поля электромагнита, без крутящего момента. Таким образом, скорость диска всегда будет отставать от скорости вращения постоянного магнита, так что линии потока вырезают диск, вызывая ток, создавая электромагнитное поле в диске, которое следует за постоянным магнитом. Если на диск накладывается нагрузка, замедляя ее, будет развиваться больше крутящего момента, так как больше линий потока вырезает диск. Крутящий момент пропорционален скольжению , степень падения диска за вращающийся магнит. Больше скольжения соответствует большему потоку, режущему проводящий диск, развивающему больше крутящего момента.
Аналоговый автомобильный вихретоковый спидометр основан на принципе, описанном выше. С диском, удерживаемым пружиной, отклонение диска и иглы пропорционально скорости вращения магнита.
Вращающееся магнитное поле создается двумя катушками, расположенными под прямым углом друг к другу, управляемыми токами, которые не равны 90 o . Это не должно удивлять, если вы знакомы с осциллографами Lissajous.
Внефазные (90 o ) синусоидальные волны создают круговую диаграмму Лиссажу.
На рисунке выше круговой Lissajous создается путем управления горизонтальными и вертикальными входами осциллографа с 90 o вне фазовых синусоидальных волн. Начиная с (a) с максимальным «X» и минимальным прогибом «Y», след перемещается вверх и лево в направлении (b). Между (а) и (б) две формы волны равны 0,707 В рк при 45 о . Эта точка (0.707, 0.707) приходится на радиус круга между (a) и (b). След переходит на (b) с минимальным «X» и максимальным «Y» прогибом. При максимальном отрицательном «X» и минимальном «Y» отклонении трассировка переходит к (c). Затем с минимальным «X» и максимальным отрицательным «Y» он перемещается в (d) и обратно на (a), завершая один цикл.
Ось синуса по оси X и окружность окружности косинуса оси Y.
На рисунке выше показаны две 90 o сдвинутые по фазе синусоидальные волны, применяемые к отклоняющим пластинам осциллографа, которые находятся под прямым углом в пространстве. Если бы это было не так, отобразилась одномерная линия. Комбинация 90-фазных синусоидальных волн и отклонение угла вправо приводит к двумерному рисунку - кругу. Этот круг прослеживается вращающимся электронным лучом против часовой стрелки.
Для справки, на рисунке ниже показано, почему синфазные синусоидальные волны не будут создавать круговой рисунок. Равные отклонения «X» и «Y» перемещают подсвеченное пятно от начала координат на (a) вверх до правой (1,1) в точке (b), назад вниз влево до начала координат (c), вниз влево (-1. -1) в точке (d) и обратно в исходное положение. Линия получается равными прогибами вдоль обеих осей; Y = x - прямая.
Нет кругового движения от синфазных сигналов.
Если пара 90- футовых синусоидальных волн образует круговой Лиссажу, аналогичная пара токов должна иметь возможность создавать круговое вращающееся магнитное поле. Это относится к двухфазному двигателю. По аналогии, три обмотки, размещенные на расстоянии 120 o в пространстве и подаваемые с соответствующими фазовыми токами на 120 o , также будут создавать вращающееся магнитное поле.
Вращающееся магнитное поле с фазовыми синусоидами 90 o .
Как показано на рис. Выше , на 90 o по сравнению с пунктами (a) - (d), магнитное поле вращается против часовой стрелки (цифры ad) следующим образом:
Скорость вращения вращающегося магнитного поля статора связана с числом пар полюсов на фазу статора. На рисунке «полная скорость» ниже приведено шесть полюсов или три пары полюсов и три фазы. Однако на одну фазу имеется только одна пара полюсов - необходимое нам число. Магнитное поле будет вращаться один раз за синусоидальный цикл. В случае мощности 60 Гц поле вращается со скоростью 60 раз в секунду или 3600 оборотов в минуту (об / мин). При мощности 50 Гц он вращается со скоростью 50 оборотов в секунду или 3000 об / мин. 3600 и 3000 об / мин - это синхронная скорость двигателя. Хотя ротор асинхронного двигателя никогда не достигает этой скорости, это, безусловно, верхний предел. Если мы удвоим число полюсов двигателя, синхронная скорость сокращается наполовину, потому что магнитное поле вращается на 180 o в пространстве для 360 o электрической синусоидальной волны.
Удвоение полюсов статора уменьшает синхронную скорость.
Синхронная скорость определяется:
N s = 120 · f / P N s = синхронная скорость в об / мин F = частота приложенной мощности, Гц P = общее количество полюсов на фазу, кратное 2 Пример: « Полуостров» На рисунке выше четыре полюса на фазу (3 фазы). Синхронная скорость для мощности 50 Гц: S = 120 · 50/4 = 1500 об / минКраткое объяснение асинхронного двигателя заключается в том, что вращающееся магнитное поле, создаваемое статором, тянет вокруг него ротор.
Чем дольше правильное объяснение состоит в том, что магнитное поле статора индуцирует переменный ток в проводники короткозамкнутого ротора, которые составляют вторичный трансформатор. Этот индуцированный ток ротора, в свою очередь, создает магнитное поле. Магнитное поле вращающегося статора взаимодействует с этим полем ротора. Поле ротора пытается совместить с полем вращающегося статора. Результатом является вращение ротора белой клетки. Если бы механическая крутящая сила двигателя не влияла на подшипники, ветры и другие потери, ротор вращался бы на синхронной скорости. Однако проскальзывание между ротором и полем статора синхронной скорости создает крутящий момент. Это магнитный поток, режущий проводники ротора, когда он скользит, который развивает крутящий момент. Таким образом, нагруженный двигатель будет скользить пропорционально механической нагрузке. Если бы ротор работал на синхронной скорости, не было бы потока статора, режущего ротор, никакого тока, индуцированного в роторе, без крутящего момента.
Когда мощность сначала подается на двигатель, ротор находится в состоянии покоя, а магнитное поле статора вращается с синхронной скоростью N s . Поле статора режет ротор при синхронной скорости N s . Ток, индуцированный в короткозамкнутых витках ротора, является максимальным, как и частота тока, линейной частоты. По мере того, как ротор ускоряется, скорость, с которой поток статора разрезает ротор, представляет собой разность между синхронной скоростью N s и фактической скоростью вращения ротора N или (N s - N). Отношение фактического потока, режущего ротор до синхронной скорости, определяется как скольжение :
S = (N s - N) / N s где: N s = синхронная скорость, N = скорость вращения ротораЧастота тока, индуцированного в проводниках ротора, только выше, чем частота линии при запуске двигателя, уменьшается, когда ротор приближается к синхронной скорости. Частота ротора определяется:
F r = s · f где: S = скольжение, f = частота линии электропередачи статораСкольжение при 100% крутящем моменте обычно составляет 5% или менее в асинхронных двигателях. Таким образом, для f = 50 Гц линейная частота, частота индуцированного тока в роторе f r = 0,05 · 50 = 2,5 Гц. Почему это так низко? Магнитное поле статора вращается со скоростью 50 Гц. Скорость вращения ротора на 5% меньше. Вращающееся магнитное поле режет только ротор с частотой 2,5 Гц. 2,5 Гц - это разница между синхронной скоростью и фактической скоростью вращения ротора. Если ротор вращается немного быстрее, то при синхронной скорости поток вообще не будет обрезать ротор, f r = 0.
Крутящий момент и скорость против% Slip. % N s =% Синхронная скорость.
На приведенном выше рисунке показано, что начальный крутящий момент, известный как момент блокировки ротора (LRT), превышает 100% от крутящего момента полной нагрузки (FLT), безопасный непрерывный крутящий момент. Зафиксированный крутящий момент ротора составляет около 175% от FLT для примера, изображенного выше. Пусковой ток, известный как заблокированный ток ротора (LRC), составляет 500% от тока полной нагрузки (FLC), безопасного тока. Ток высокий, потому что он аналогичен второстепенному вторичному трансформатору. Когда ротор начнет вращаться, крутящий момент может немного уменьшиться для некоторых классов двигателей до значения, известного как момент вытягивания . Это наименьшее значение крутящего момента, когда-либо возникавшего при запуске двигателя. Поскольку ротор получает 80% синхронной скорости, крутящий момент увеличивается с 175% до 300% от крутящего момента полной нагрузки. Этот крутящий момент прорыва обусловлен более чем 20% -ным скольжением. В настоящее время ток немного снизился, но будет быстро уменьшаться за этот момент. Поскольку ротор ускоряется с точностью до нескольких процентов от синхронной скорости, как крутящий момент, так и ток будут существенно уменьшаться. При нормальной работе скольжение будет составлять всего несколько процентов. Для работающего двигателя любая часть кривой крутящего момента ниже 100% номинального крутящего момента является нормальной. Нагрузка двигателя определяет рабочую точку кривой крутящего момента. В то время как крутящий момент и ток двигателя могут превышать 100% в течение нескольких секунд во время пуска, непрерывная работа выше 100% может повредить двигатель. Любая нагрузка крутящего момента двигателя выше крутящего момента простоя задерживает двигатель. Крутящий момент, скольжение и ток приблизятся к нулю при условии отсутствия механического крутящего момента. Это условие аналогично открытому вторичному трансформатору.
Существует несколько базовых конструкций асинхронных двигателей (рис. Ниже ), показывающих заметное отклонение от кривой крутящего момента выше. Различные конструкции оптимизированы для запуска и запуска различных типов нагрузок. Зафиксированный крутящий момент ротора (LRT) для различных конструкций и размеров двигателей колеблется от 60% до 350% от крутящего момента полной нагрузки (FLT). Пусковой ток или ток заблокированного ротора (LRC) может составлять от 500% до 1400% от тока полной нагрузки (FLC). Этот ток может представлять собой проблему запуска для крупных асинхронных двигателей.
Для лучшего привода различных типов нагрузок были разработаны различные стандартные классы (или конструкции) для двигателей, соответствующие кривым крутящего момента (рисунок ниже ). Национальная ассоциация производителей электрооборудования (NEMA) указала моторные классы A, B, C и D для удовлетворения этих требований к приводу. Аналогичные классы Международной электротехнической комиссии (МЭК) N и H соответствуют проектам NEMA B и C соответственно.
Характеристики для конструкций NEMA.
Все двигатели, кроме класса D, работают при скольжении% 5 или менее при полной нагрузке.
Асинхронные двигатели представляют собой запаздывающий (индуктивный) коэффициент мощности для линии электропередач. Коэффициент мощности в больших полностью нагруженных высокоскоростных двигателях может быть столь же благоприятным, как и 90% для больших высокоскоростных двигателей. При полной нагрузке 3/4 максимальный коэффициент мощности двигателя с высокой скоростью может составлять 92%. Коэффициент мощности для малых низкоскоростных двигателей может составлять всего 50%. При запуске коэффициент мощности может находиться в диапазоне от 10% до 25%, увеличиваясь по мере достижения ротора.
Коэффициент мощности (PF) значительно отличается от механической нагрузки двигателя (рисунок ниже ). Незагруженный двигатель аналогичен трансформатору без резистивной нагрузки на вторичный. Небольшое сопротивление отражается от вторичного (ротора) до первичного (статора). Таким образом, линия электропередач видит реактивную нагрузку, как 10% PF. При загрузке ротора возрастающая резистивная составляющая отражается от ротора до статора, увеличивая коэффициент мощности.
Коэффициент мощности и коэффициент индуктивности.
Большие трехфазные двигатели более эффективны, чем более мелкие трехфазные двигатели, и большинство всех однофазных двигателей. Большая эффективность асинхронного двигателя может достигать 95% при полной нагрузке, хотя 90% чаще встречается. Эффективность для малонагруженного или ненагруженного асинхронного двигателя недостаточна, поскольку большая часть тока связана с поддержанием потока намагничивания. По мере увеличения крутящей нагрузки больше тока потребляется при генерировании крутящего момента, тогда как ток, связанный с намагничиванием, остается фиксированным. Эффективность при 75% FLT может быть немного выше, чем при 100% FLT. Эффективность снижается на несколько процентов при 50% FLT и уменьшается на несколько процентов при 25% FLT. Эффективность становится только ниже 25% FLT. Изменение эффективности с загрузкой показано на рисунке выше
Асинхронные двигатели, как правило, имеют большой размер, чтобы гарантировать, что их механическая нагрузка может быть запущена и управляться при всех рабочих условиях. Если многофазный двигатель загружен с номинальным крутящим моментом менее 75%, когда пиковые значения эффективности, эффективность незначительно снижается до 25% FLT.
Фрэнк Нола из NASA предложил корректор коэффициента мощности (PFC) в качестве энергосберегающего устройства для однофазных асинхронных двигателей в конце 1970-х годов. Он основан на предпосылке, что менее чем полностью загруженный асинхронный двигатель менее эффективен и имеет более низкий коэффициент мощности, чем полностью нагруженный двигатель. Таким образом, есть энергия, которая должна быть сохранена в частично нагруженных двигателях, в частности, в двигателях с 1-ф. Энергия, потребляемая при поддержании магнитного поля статора, относительно фиксирована относительно изменений нагрузки. Хотя нет ничего, что можно было бы сохранить в полностью нагруженном двигателе, напряжение на частично нагруженном двигателе может быть уменьшено, чтобы уменьшить энергию, необходимую для поддержания магнитного поля. Это увеличит коэффициент мощности и эффективность. Это была хорошая концепция для известных неэффективных однофазных двигателей, для которых это предназначалось.
Эта концепция не очень подходит для крупных трехфазных двигателей. Из-за их высокой эффективности (90% +) энергии не хватает. Кроме того, 95% -ный эффективный двигатель по-прежнему на 94% эффективен при 50% -ном крутящем моменте полной нагрузки (FLT) и 90% эффективен при 25% FLT. Потенциальная экономия энергии при переходе от 100% FLT до 25% FLT - это разница в эффективности 95% - 90% = 5%. Это не 5% от полной нагрузки, а 5% от мощности при уменьшенной нагрузке. Корректор коэффициента мощности Nola может быть применен к трехфазному двигателю, который большую часть времени простаивает (ниже 25% FLT), как пресс-пуансон. Период окупаемости дорогостоящего электронного контроллера оценивался как непривлекательный для большинства приложений. Хотя, это может быть экономичным как часть электронного стартера двигателя или управления скоростью. [7]
Асинхронный двигатель может работать как генератор переменного тока, если он управляется крутящим моментом более чем на 100% от синхронной скорости. (Рисунок ниже ) Это соответствует нескольким процентам «отрицательного» промаха, скажем, -1% скольжения. Это означает, что, когда мы вращаем двигатель быстрее, чем синхронная скорость, ротор движется на 1% быстрее, чем вращающееся магнитное поле статора. Он обычно отстает на 1% в двигателе. Поскольку ротор режет магнитное поле статора в противоположном направлении (ведущем), ротор вызывает напряжение в статоре, подающем электрическую энергию обратно в линию электропередачи.
Отрицательный крутящий момент превращает асинхронный двигатель в генератор.
Такой индукционный генератор должен возбуждаться «живым» источником мощности 50 или 60 Гц. В случае сбоя питания энергетической компании не может быть произведена никакая мощность. Этот тип генератора переменного тока не подходит в качестве резервного источника питания. В качестве вспомогательного генератора ветровых турбин мощности он имеет то преимущество, что не требует автоматического отключения питания, чтобы защитить ремонтные бригады. Он отказоустойчив.
Небольшие удаленные (от электросети) установки могут создавать самовозбуждение, размещая конденсаторы параллельно фазам статора. При удалении нагрузки остаточный магнетизм может генерировать небольшой поток тока. Этот ток пропускается конденсаторами без рассеивания мощности. По мере того, как генератор доводится до полной скорости, ток увеличивается, чтобы подавать намагничивающий ток на статор. Нагрузка может быть применена в этой точке. Регулирование напряжения плохое. Асинхронный двигатель может быть преобразован в самовозбуждающийся генератор путем добавления конденсаторов. [6]
Процедура запуска заключается в том, чтобы довести ветротурбину до скорости в режиме двигателя путем приложения напряжения нормальной сети к статору. Любая скорость турбины, индуцированная ветром, превышающая синхронную скорость, будет создавать отрицательный крутящий момент, подавая энергию обратно в линию электропередачи, изменяя нормальное направление электрического киловатт-часов. В то время как асинхронный двигатель представляет собой коэффициент запаздывания мощности для линии электропередачи, индукционный генератор представляет собой ведущий коэффициент мощности. Индукционные генераторы широко не используются в обычных электростанциях. Скорость привода паровой турбины стабильна и управляема, как того требуют синхронные генераторы. Синхронные генераторы также более эффективны.
Скорость ветровой турбины затруднена и зависит от изменения скорости ветра порывами. Индукционный генератор лучше справляется с этими изменениями из-за присущего им скольжения. Это подчеркивает зубчатую передачу и механические компоненты меньше, чем синхронный генератор. Однако это допустимое изменение скорости составляет лишь около 1%. Таким образом, прямой ветровой индукционный генератор считается стационарной скоростью в ветряной турбине. См. Генератор индукции с двойным питанием для настоящего переменного генератора переменной скорости. Несколько генераторов или несколько обмоток на общем валу могут переключаться, чтобы обеспечить высокую и малую скорость для размещения переменных условий ветра.
Некоторые асинхронные двигатели могут потреблять более 1000% от тока полной нагрузки во время запуска; Хотя, несколько сотен процентов чаще встречается. Малые двигатели на несколько киловатт или меньше могут быть запущены прямым подключением к линии электропередач. Запуск более крупных двигателей может вызвать провисание сетевого напряжения, влияя на другие нагрузки. Автоматические выключатели с автоматическим запуском (аналогичные плавким предохранителям) должны заменять стандартные автоматические выключатели для пуска двигателей на несколько киловатт. Этот прерыватель допускает высокий перегрузок по току в течение времени запуска.
Автотрансформаторный асинхронный моторный пускатель.
Двигатели мощностью более 50 кВт используют пускатели двигателей для снижения тока линии от нескольких сотен до нескольких сотен процентов от тока полной нагрузки. Автотрансформатор с прерывистой нагрузкой может уменьшить напряжение статора на долю минуты в течение интервала пуска с последующим применением полного линейного напряжения, как показано на рисунке выше . Закрытие контактов S приводит к уменьшенному напряжению во время интервала пуска. S контактов разомкнут, а контакты R закрываются после запуска. Это уменьшает пусковой ток до, скажем, 200% от тока полной нагрузки. Поскольку автотрансформатор используется только для короткого интервала пуска, он может быть значительно меньше, чем блок непрерывной работы.
Трехфазные двигатели работают на одной фазе так же легко, как однофазные двигатели. Единственная проблема для обоих двигателей. Иногда трехфазные двигатели приобретаются для использования на одной фазе, если ожидается трехфазное обеспечение. Мощность должна быть на 50% больше, чем для аналогичного однофазного двигателя, чтобы компенсировать одну неиспользованную обмотку. Однофазное применяется к паре обмоток, одновременно с пусковым конденсатором последовательно с третьей обмоткой. Стартовый выключатель открывается на рисунке ниже при запуске двигателя. Иногда при работе сохраняется меньший конденсатор, чем пусковой конденсатор.
Запуск трехфазного двигателя в однофазном режиме.
Схема, показанная на рисунке выше для запуска трехфазного двигателя на одной фазе, известна как статический преобразователь фазы, если вал двигателя не загружен. Кроме того, двигатель действует как трехфазный генератор. Трехфазная мощность может быть отключена от трех обмоток статора для питания другого трехфазного оборудования. Конденсатор подает синтетическую фазу примерно на полпути ∠90 o между клеммами источника питания однофазного тока ∠180 o для запуска. Во время работы двигатель генерирует приблизительно стандартный 3-φ, как показано на рисунке выше . Мэтт Isserstedt показывает полный дизайн для питания дома машины. [8]
Стационарный статический преобразователь. Запуск конденсатора = 25-30 мкФ на HP. Адаптировано из рис. 7, Ханрахан [9]
Так как преобразователь статической фазы не имеет крутящей силы, его можно запустить с помощью конденсатора, значительно меньшего, чем обычный пусковой конденсатор. Если он достаточно мал, он может быть оставлен в цепи в качестве конденсатора. См. Рисунок выше . Тем не менее, меньшие конденсаторы работают в 3-фазной выходной мощности, как показано на рисунке ниже . Кроме того, регулировка этих конденсаторов для выравнивания токов, измеренных в трех фазах, приводит к самой эффективной машине. [9] Однако, большой стартовый конденсатор требуется около секунды для быстрого запуска преобразователя. Hanrahan предоставляет детали строительства. [9]
Более эффективный статический преобразователь фазы. Пусковой конденсатор = 50-100 мкФ / л.с. Запуск конденсаторов = 12-16 мкФ / л.с. Адаптировано из рис. 1, Ханрахан [9]
Асинхронные двигатели могут содержать несколько обмоток возбуждения, например, 4-полюсную и 8-полюсную обмотку, соответствующие синхронным скоростям 1800 и 900 об / мин. Энергия одного поля или другого менее сложна, чем переключение катушек статора на рисунке ниже .
Несколько полей позволяют изменять скорость.
Если поле сегментировано с выведенными проводами, его можно переустановить (или переключить) с 4-полюсного на 2-полюсное, как показано выше для двухфазного двигателя. Секунды 22,5 o переключаются на 45 o сегментов. Для ясности показана только проводка для одной фазы. Таким образом, наш асинхронный двигатель может работать на нескольких скоростях. При переключении вышеописанного двигателя частотой 60 Гц с 4 полюсов на 2 полюса синхронная скорость увеличивается с 1800 об / мин до 3600 об / мин. Если двигатель работает на 50 Гц, каковы будут соответствующие 4-полюсные и 2-полюсные синхронные скорости?
N s = 120f / P = 120 * 50/4 = 1500 об / мин (4-полюсный) N s = 3000 об / мин (2-полюсный)Скорость малогабаритных асинхронных электродвигателей с короткозамкнутым ротором для таких применений, как приводные вентиляторы, может быть изменена за счет снижения сетевого напряжения. Это уменьшает крутящий момент, доступный для нагрузки, что снижает скорость. (Рисунок ниже )
Регулируемое напряжение контролирует скорость асинхронного двигателя.
Современная полупроводниковая электроника увеличивает возможности контроля скорости. Изменяя линейную частоту 50 или 60 Гц на более высокие или более низкие значения, можно изменить синхронную скорость двигателя. Однако уменьшение частоты тока, подаваемого на двигатель, также уменьшает сопротивление X L, которое увеличивает ток статора. Это может привести к насыщению магнитной цепи статора с катастрофическими результатами. На практике напряжение на двигателе должно уменьшаться при уменьшении частоты.
Электронный привод с переменной скоростью.
И наоборот, частота привода может быть увеличена для увеличения синхронной скорости двигателя. Однако необходимо увеличить напряжение, чтобы преодолеть возрастающую реактивность, чтобы поддерживать ток до нормального значения и поддерживать крутящий момент. Инвертор (рис. ) Аппроксимирует синусоиды двигателю с выходами широтно-импульсной модуляции. Это прерывистая волновая форма, которая либо включена, либо выключена, высокая или низкая, процентное время «включено» соответствует мгновенному напряжению синусоидальной волны.
Когда электроника применяется к управлению асинхронным двигателем, доступно множество методов управления, варьирующихся от простого до сложного:
Описание: Управление скоростью
Реферат: Многофазные асинхронные двигатели Тесла
Статор раны и ротор короткозамкнутого ротора асинхронного двигателя могут быть разрезаны по окружности и разворачиваются в линейный асинхронный двигатель. Направление линейного перемещения контролируется последовательностью привода к фазам статора.
Линейный асинхронный двигатель был предложен в качестве привода для скоростных пассажирских поездов. До этого времени линейный асинхронный двигатель с сопровождающей системой магнитной отталкивающей левитации, требуемый для плавной езды, был слишком дорогостоящим для всех, кроме экспериментальных установок. Тем не менее, линейный асинхронный двигатель, как ожидается, заменит паровые катапультные системы запуска летательных аппаратов нового поколения военно-морского авианосца CVNX-1 в 2013 году. Это повысит эффективность и сократит обслуживание.
shemabook.ru
 Влияние Николы Тесла на современный мир как изобретателя, ученого, физика и инженера сильно недооценено. Он разработал индукционный двигатель, сделал огромный вклад в создание приборов, работающих на переменном токе и других изобретений, которые помогли совершить вторую стадию промышленной революции.
Влияние Николы Тесла на современный мир как изобретателя, ученого, физика и инженера сильно недооценено. Он разработал индукционный двигатель, сделал огромный вклад в создание приборов, работающих на переменном токе и других изобретений, которые помогли совершить вторую стадию промышленной революции. Несмотря на это, очень не много музеев посвящено этому гениальному физику. Множество его изобретений и идей были в свое время приняты с безразличием, особенно Томасом Эдисоном, у которого Тесла одно время работал. Недавно Нью-Йоркский зал науки представил выставку в Куинсе под названием "Tesla's Wonderful World of Electricity" (Удивительный мир электричества Николы Тесла).
На выставке представлены несколько экспонатов из Музея Николы Тесла в Белграде, а также его самые запоминающиеся изобретения, как например катушка Тесла, и менее известные, такие как "телеаутоматон", или просто радиоуправляемая лодка. В данное время музей имени Николы Тесла в США еще строится. Это стало возможным благодаря 1,4 миллионам долларов, собранных с помощью Мэтью Инмана, создателя веб-сайта The Oatmeal.
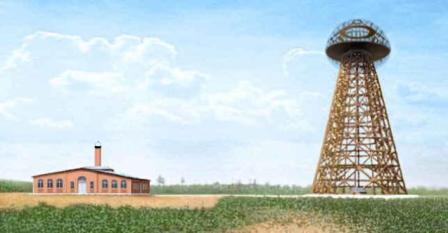
На эти деньги была приобретена Башня Ворденклиф - первая беспроводная телекоммуникационная башня, которую построил Тесла. Именно там начались работы по строительству музея изобретателя.
 Изобретения Николы Тесла Радиоуправляемая лодка
Изобретения Николы Тесла Радиоуправляемая лодка

Тесла создал радиоуправляемую лодку, чтобы представить ее в Мэдисон-сквер-гардене в 1898 году. Тесла называл этот корабль "devil automata" (автоматический дьявол) и он знал, что такое изобретение может быть использовано для проведения боев с расстояния. Телеаутоматон на выставке Тесла продемонстрировал возможности корабля, на расстоянии, детонируя бомбы, созданные Маркони. Он акцентировал внимание зрителей на магию и тайну своего изобретения, и не разглашал всех секретов своей машины репортерам. Из-за этого изобретение Маркони затмило в прессе корабль Тесла.
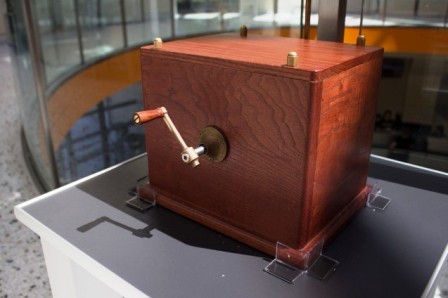 Пульт радиоуправления корабля - огромная коробка с рычагом.
Пульт радиоуправления корабля - огромная коробка с рычагом.
Тесла также намеревался создать радиоуправляемую подлодку и даже предложил правительству патент на разработку инструмента войны. Позже Тесла писал, что вместо ответа "раздался хохот".
Катушка тесла
 Катушка Тесла с множеством деталей, спрятанных под стеклом.
Катушка Тесла с множеством деталей, спрятанных под стеклом.

Если держать люминесцентную лампу рядом с катушкой, то лампа зажжется. Можно заметить искры, прыгающие к точке касания.
Тесла намеревался использовать свои катушки для беспроводной передачи энергии на маленьком расстоянии, и катушки действительно работают. Самолет с вертикальным взлетом
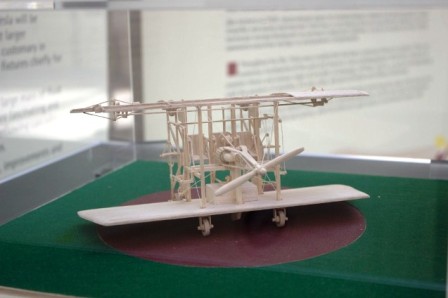
Одним из детищ Тесла, запатентованным в 1928 году был летающий аппарат с вертикальным взлетом. Машина является смесью биплана и вертолета - крылья позволяли держаться в воздухе, а пропеллер взлетать. Как только он набирал высоту, аппарат мог начать горизонтальный полет. Пропеллер в разработке Тесла был очень маленьким, чтобы позволить аппарату взлететь. Также в проекте не предусмотрен хвост, чтобы обеспечить уравновешивание крутящего момента. Журнал Air & Space Magazine пишет о том, что во время взлета самолет начал бы быстро крутиться по кругу.
По мнению автора книги о Тесле, дизайн данного "провального" изобретения был секретно взят военными службами США за основу при конструкции V-22 Osprey - американского конвертоплана, сочетающего в себе возможности самолета и вертолета.

Модель лаборатории Тесла на Лонг-Айленде прилежащей к запланированной Башни Ворденклиф.
Основная часть башни была построена, но купол так и не был завершен. Тесла хотел использовать башню, как мировой телеграфный центр. Вместе с архитекторской фирмой McKim, Mead & White он также обсуждал возможности использования своих 1 800 акров земли для строительства небольшого городка с домами, магазинчиками, и зданиями. Кроме того, Тесла заявлял, что будет использовать свои высокочастотные генераторы, чтобы общаться с марсианами (на тот момент очень популярная тема), "если они достаточно умны, чтобы принять послание". Двигатель Тесла
 Модель индукционного двигателя с дисковым ротором.
Модель индукционного двигателя с дисковым ротором.
Разработка, над которой работал Тесла в компании Эдисона "Continental Edison Company" в 1883 году. Подобные моторы просты, рентабельные, и до сих пор используются, например в вентиляторах.
Тесла показал, как можно использовать индукцию для запуска мотора Обществу инженеров электриков США в 1888 году. Изначально его целью было доказать ошибочное предположение одного из своих профессоров, который утверждал, что силу переменного тока невозможно обуздать.
Источник: "Infoniac.ru"
Фото с сайта источника
ru-bashka.ucoz.ru