Реактивный двигатель – устройство, создающее требуемую для движения силу тяги, преобразовывая внутреннюю энергию горючего в кинетическую энергию реактивной струи рабочего тела.
Все реактивные двигатели подразделяют на 2 класса:
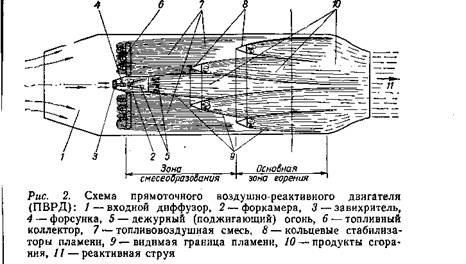
Прямоточный воздушно-реактивный двигатель – самый простой в классе ВРД по конструкции. Требуемое для работы устройства повышение давления образуется путем торможения встречного воздушного потока.

Рабочий процесс ПВРД можно кратко описать следующим образом:
В конструктивном плане ПВРД является предельно простым устройством. В составе двигателя есть камера сгорания, внутрь которой горючее поступает из топливных форсунок, а воздух – из диффузора. Камера сгорания заканчивается входом в сопло, которое является суживающейся-расширяющимся.
Развитие технологии смесевого твердого топлива повлекло за собой использование этого горючего в ПВРД. В камере сгорания располагается топливная шашка с центральным продольным каналом. Проходя по каналу, рабочее тело постепенно окисляет поверхность топлива и нагревается само. Применение твердого горючего еще более упрощает состоящую конструкцию двигателя: топливная система становится ненужной.
Смесевое топливо по своему составу в ПВРД отличается от применяемого в РДТТ. Если в ракетном двигателе большую часть состава топлива занимает окислитель, то в ПВРД он используется в небольших пропорциях для активирования процесса горения.
Наполнитель смесевого топлива ПВРД преимущественно состоит из мелкодисперсного порошка бериллия, магния или алюминия. Их теплота окисления существенно превосходит теплоту сгорания углеводородного горючего. В качестве примера твердотопливного ПВРД можно привести маршевый двигатель крылатой противокорабельной ракеты «П-270 Москит».

Тяга ПВРД зависит от скорости полета и определяется исходя из влияния нескольких факторов:
Зависимость тяги прямоточного воздушно-реактивного двигателя от скорости полета можно представить следующим образом: до того момента, пока скорость полета намного ниже скорости прохождения реактивной струи, тяга будет увеличиваться вместе с ростом скорости полета. Когда скорость полета приближается к скорости реактивной струи, тяга начинает падать, миновав определенный максимум, при котором наблюдается оптимальная скорость полета.
В зависимости от скорости полета выделяют такие категории ПВРД:

Каждая из групп имеет свои отличительные особенности конструкции.
Эта группа двигателей предназначена для обеспечения полетов на скоростях, равных от 0,5 до 1,0 числа Маха. Сжатие воздуха и торможение в таких двигателях происходит в диффузоре – расширяющемся канале устройства на входе потока.
Данные двигатели имеют крайне низкую эффективность. При полетах на скорости М= 0,5 уровень увеличения давления в них равен 1,186, из-за чего идеальный термический КПД для них – всего 4,76%, а если еще и учитывать потери в реальном двигателе, эта величина будет приближаться к нулю. Это значит, что при полетах на скоростях M<0,5 дозвуковой ПВРД неработоспособен.
Но даже на предельной скорости для дозвукового диапазона при М=1 уровень увеличения давления равен 1,89, а идеальный термический коэффициент – всего 16, 7%. Эти показатели в 1,5 раза меньше, чем у поршневых двигателей внутреннего сгорания, и в 2 раза меньше, нежели у газотурбинных двигателей. Газотурбинные и поршневые двигатели к тому же эффективны для использования при работе в стационарном положении. Поэтому прямоточные дозвуковые двигатели в сравнении с другими авиационными двигателями оказались неконкурентоспособными и в настоящее время серийно не выпускаются.
Сверхзвуковые ПВРД рассчитаны на осуществление полетов в диапазоне скоростей 1 < M < 5.
Торможение газового сверхзвукового потока всегда выполняется разрывно, при этом образуется ударная волна, которая называется скачком уплотнения. На дистанции ударной волны процесс сжатия газа не является изоэнтропийным. Следовательно, наблюдаются потери механической энергии, уровень увеличения давления в нем меньший, нежели в изоэнтропийном процессе. Чем мощнее будет скачок уплотнения, тем больше изменится скорость потока на фронте, соответственно, больше потери давления, иногда достигающие 50%.
Для того чтобы минимизировать потери давления, организуется сжатие не в одном, а нескольких скачках уплотнения с меньшей интенсивностью. После каждого из таких скачков наблюдается снижение скорости потока, которая остается сверхзвуковой. Это достигается, если фронт скачков расположен под углом к направлению скорости потока. Параметры потока в интервалах между скачками остаются постоянными.
В последнем скачке скорость достигает дозвукового показателя, дальнейшие процессы торможения и сжатия воздуха происходят непрерывно в канале диффузора.
Если входное устройство мотора расположено в области невозмущенного потока (например, впереди летательного аппарата на носовом окончании или на достаточном отдалении от фюзеляжа на крыльевой консоли), оно выполняется асимметричным и комплектуется центральным телом – острым длинным «конусом», выходящим из обечайки. Центральное тело предназначено для создания во встречном воздушном потоке косых скачков уплотнения, которые обеспечивают сжатие и торможение воздуха до момента его поступления в специальный канал входного устройства. Представленные входные устройства получили название устройств конического течения, воздух внутри них циркулирует, образуя коническую форму.
Центральное коническое тело может быть оснащено механическим приводом, который позволяет ему двигаться вдоль оси двигателя и оптимизировать торможение потока воздуха на разных скоростях полета. Данные входные устройства называются регулируемыми.
При фиксации двигателя под крылом или снизу фюзеляжа, то есть в области аэродинамического влияния элементов конструкции самолета, используют входные устройства плоской формы двухмерного течения. Они не оснащаются центральным телом и имеют поперечное прямоугольное сечение. Их еще называют устройствами смешанного или внутреннего сжатия, поскольку внешнее сжатие здесь имеет место только при скачках уплотнения, образующихся у передней кромки крыла или носового окончания летательного аппарата. Входные регулируемые устройства прямоугольного сечения способны менять положение клиньев внутри канала.
В сверхзвуковом скоростном диапазоне ПВРД более эффективен, нежели в дозвуковом. К примеру, на скорости полета М=3 степень увеличения давления составляет 36,7, что приближается к показателю турбореактивных двигателей, а расчетный идеальный КПД достигает 64,3 %. На практике эти показатели меньшие, но на скоростях в диапазоне М=3-5 СПВРД по эффективности превосходят все существующие типы ВРД.
При температуре невозмущенного воздушного потока 273°K и скорости самолета М=5 температура рабочего заторможенного тела равна 1638°К, при скорости М=6 — 2238°К, а в реальном полете с учетом скачков уплотнения и действия силы трения становится еще выше.
Дальнейшее нагревание рабочего тела является проблематичным из-за термической неустойчивости конструкционных материалов, входящих в состав двигателя. Поэтому предельной для СПВРД считается скорость, равная М=5.
К категории гиперзвуковых ПВРД относится ПВРД, который работает на скоростях более 5М. По состоянию на начало XXI века существование такого двигателя было только гипотетическим: не собрано ни единого образца, который бы прошел летные испытания и подтвердил целесообразность и актуальность его серийного выпуска.
На входе в устройство ГПВРД торможение воздуха выполняется только частично, и на протяжении остального такта перемещение рабочего тела является сверхзвуковым. Большая часть кинетической исходной энергии потока при этом сохраняется, после сжатия температура относительно низкая, что позволяет освободить рабочему телу значительное количество тепла. После входного устройства проточная часть двигателя по всей своей длине расширяется. За счет сгорания топлива в сверхзвуковом потоке происходит нагрев рабочего тела, оно расширяется и ускоряется.
Этот тип двигателя предназначен для проведения полетов в разреженной стратосфере. Теоретически такой двигатель можно использовать на многоразовых носителях космических аппаратов.
Одной из главных проблем конструирования ГПВРД является организация сгорания топлива в сверхзвуковом потоке.
В разных странах начаты несколько программ по созданию ГПВРД, все они находятся на стадии теоретических изысканий и предпроектных лабораторных исследований.
ПВРД не работает при нулевой скорости и низких скоростях полета. Летательный аппарат с таким двигателем требует установки на нем вспомогательных приводов, в роли которых может выступать твердотопливный ракетный ускоритель или самолет-носитель, с которого производится запуск аппарата с ПВРД.
По причине неэффективности ПВРД на малых скоростях его практически неуместно использовать на пилотируемых самолетах. Такие двигатели предпочтительно использовать для беспилотных, крылатых, боевых ракет одноразового применения благодаря надежности, простоте и дешевизне. ПВРД также применяют в летающих мишенях. Конкуренцию по характеристикам ПВРД составляет только ракетный двигатель.
В период холодной войны между СССР и США создавались проекты прямоточных воздушных реактивных двигателей с ядерным реактором.
В таких агрегатах в качестве источника энергии выступала не химическая реакция сжигания топлива, а тепло, которое вырабатывал ядерный реактор, установленный вместо камеры сгорания. В таком ПВРД воздух, поступающий сквозь входное устройство, проникает в активную область реактора, охлаждает конструкцию и сам нагревается до 3000 К. Далее происходит его истекание из сопла двигателя со скоростью, приближенной к скорости совершенных ракетных двигателей. Ядерные ПВРД предназначались для установки в межконтинентальных крылатых ракетах, несущих ядерный заряд. Конструкторы в обеих странах создали малогабаритные ядерные реакторы, которые поместились в габариты крылатой ракеты.
В 1964 году в рамках программ исследования ядерных ПВРД Tory и Pluto провели стационарные огневые испытания ядерного ПВРД Tory-IIC. Программа испытаний была закрыта в июле 1964 г., летные испытания двигателя не проводили. Предположительной причиной сворачивания программы могло послужить совершенствование комплектации баллистических ракет ракетными химическими двигателями, которые позволяли реализовать боевые задачи без привлечения ядерных ПВРД.
avia.pro

Внутренняя часть гиперзвукового прямоточного двигателя
Василий Сычёв
Центральный институт авиационного моторостроения имени Баранова приступил к стендовым испытаниям прототипа перспективного водородного гиперзвукового прямоточного воздушно-реактивного двигателя, разработка которого ведется в рамках масштабного международного проекта HEXAFLY-INT. Об этом изданию N + 1 рассказали на стенде института на Международном форуме двигателестроения, проходящем на ВДНХ с 4-го по 6 апреля. Первые испытания показали, что демонстратор технологий новой силовой установки способен надежно функционировать при скорости воздушного потока в 7,4 числа Маха (9,1 тысячи километров в час).
Одним из основных направлений исследований авиастроительных компаний в мире сегодня являются сверхзвуковые пассажирские самолеты. В будущем они позволят сократить время полетов по традиционным маршрутам почти в два раза. Такие летательные аппараты могут начать выполнять полеты самое раннее в середине 2020-х годов. Одновременно исследования ведутся и в области полетов на гиперзвуковой скорости, однако они пока носят больше теоретический, нежели практический характер.
Стендовые испытания двигателя, разработанного Центральным институтом авиационного моторостроения, проводятся в специальной аэродинамической трубе. В мире подобных испытательных стендов, позволяющих испытывать авиационные двигатели на земле на гиперзвуковых скоростях потока, существует всего два: один — в США, а второй — в России. Стендовые испытания планируется завершить в текущем году, а в 2019-м — приступить к летным проверкам нового двигателя. При этом на стенде отметили, что эти сроки могут сдвинуться в зависимости от итогов стендовых испытаний.
Новый водородный гиперзвуковой двигатель внешне представляет собой клиновидную прямоугольную в сечении конструкцию с заужением в центральной части, где происходит незначительное торможение воздушного потока, смешение с топливом и поджиг. Силовая установка работает по принципу создания разницы давления на входе и выходе. Конструкторы рассчитали, что теоретически водородный двигатель способен развивать скорость до 12 чисел Маха. Минимальная скорость полета, на которой двигатель начинает стабильно работать, составляет 2,2-2,5 числа Маха.

Водородный гиперзвуковой прямоточный воздушно-реактивный двигатель
Василий Сычёв
Гиперзвуковой двигатель, демонстратор технологий которого создан Центральным институтом авиационного моторостроения, может работать на высоте полета до 35 тысяч метров. Такая высота считается оптимальной с точки зрения экономичных гиперзвуковых полетов — из-за разрежения атмосферы аэродинамическое сопротивление летательного аппарата ниже, но при этом сохраняется достаточный для работы силовой установки приток воздуха. В полете двигатель будет подвержен высоким температурам. Для перераспределения тепла и расширения температурных режимов установки воздухозаборную ее часть сделали из меди.В силовой установке подача водорода производится через два пояса, один из которых расположен на входе в камеру сгорания ближе к воздухозаборнику, а второй — в середине эллиптической камеры сгорания.
Разработкой проекта HEXAFLY-INT занимаются научно-исследовательские центры из Евросоюза, России и Австралии. От Евросоюза координатором проекта выступает Европейский центр космических исследований и технологий, а от России — Центральный аэрогидродинамический институт имени Жуковского. Летом 2017 года на авиасалоне МАКС-2017 российские разработчики представили модель гиперзвукового летательного аппарата HEXAFLY-INT.
Представленная модель предназначена для исследований в аэродинамической трубе. В первую очередь она должна помочь в определении оптимального соотношения между внутренним полезным объемом летательного аппарата и сечением воздухозаборника гиперзвукового прямоточного воздушно-реактивного двигателя. Аппарат выполняется по схеме «несущий корпус», при которой в полете значительная часть подъемной силы образуется на широком фюзеляже.
Модель также оснащена коротким крылом большой стреловидности и двумя килями. В рамках проекта планируется создать демонстратор технологий длиной около трех метров. Согласно действующим планам, демонстратор технологий HEXAFLY-INT должен будет показать возможность стабильного и управляемого полета на скорости не менее семи чисел Маха (около 8,6 тысячи километров в час). Когда именно может состояться первый полет аппарата, пока неизвестно. Проект HEXAFLY-INT, стартовавший в 2014 году, рассчитан до апреля 2019 года.
Василий Сычёв
nplus1.ru
Одним из наиболее простых по конструкции силовых агрегатов семейства воздушно-реактивных двигателей является прямоточный воздушно-реактивный двигатель (ПВРД). Как и у всех других ВРД, его тяга обеспечивается сгоранием топлива и образованием реактивного потока, но при этом он имеет и ряд принципиальных отличий.
Конструкция ПВРД, как было отмечено выше, отличается лаконичностью и минимальным количеством составляющих элементов. В упрощенном варианте он состоит из диффузора, камеры сгорания и сопла, а также вспомогательных систем подачи топлива и зажигания, которые в некоторых моделях могут и отсутствовать. На первый взгляд может показаться, что собрать такой двигатель можно и самостоятельно, ведь в нем нет ничего сложного, но на самом деле это не совсем так. Эффективность работы ПВРД зависит от множества мелких нюансов, в том числе и от формы, геометрии и размеров диффузора и сопла. Эти параметры определяют тип ПВРД, его мощность и сферу применения.

Работа ПВРД, как и практически всех реактивных двигателей (кроме пульсирующих ВРД), нециклична, то есть беспрерывна. Встречный поток воздуха через входное устройство попадает в диффузор, где снижает свою скорость и сжимается, превращая кинетическую энергию движения во внутреннюю. Сжатый и нагретый воздух с пониженной скоростью попадает в камеру сгорания, перемешивается с впрыснутым форсунками топливом и образует топливный заряд. Полученная горючая смесь воспламеняется от искры или при контакте с горячими стенками двигателя, в результате чего образуются продукты сгорания – газы с большим зарядом энергии. Поток расширяющихся газов проходит через сопло и выходит наружу со скоростью большей, чем скорость полета, образуя реактивную тягу.
В некоторых моделях ПВРД жидкое топливо заменяется твердым, расположенным в камере сгорания, что значительно упрощает его конструкцию. В этом случае система подачи топлива отсутствует, а само топливо представляет собой измельченный порошок бериллия, алюминия или магния, который нагревается и под влиянием температуры и кислорода постепенно окисляется.
Как легко заметить, ПВРД имеет один недостаток: он не может работать при низких скоростях или в неподвижном состоянии. Для его запуска и стабильной работы необходим достаточно мощный встречный воздушный поток, который может обеспечиваться только дополнительным ускорителем.
Конструкция и принцип работы ПВРД были разработаны и запатентованы французом Рене Лореном в 1913 году. Многих авиаконструкторов того времени привлекла простота устройства этого двигателя, возможность его использования при полетах со сверхзвуковыми скоростями и в разреженных слоях атмосферы. Первые рабочие модели были получены во Франции, США и СССР уже в 30-х годах. Начало Второй мировой войны остановило многие научные работы, но уже в конце 40-х – начале 50-х годов ученые вновь вернулись к ПВРД. Первой ракетой, оснащенной этим двигателем, стала французская Leduc 010, за которой последовали Leduc 021 и Leduc 022. Со временем эксперименты с ПВРД прекратились, а их признали бесперспективными, потому как появились более удобные в использовании и эффективные ТРД.

Leduc 022
Среди отечественных разработок стоит отметить межконтинентальную ракету «Буря», над созданием которой работали советские конструкторы. В 1957 году она прошла первые испытания, которые выявили ряд ее недостатков, таких как проблемы с точностью поражения целей. Из современных ракет ПВРД оснащаются П-270 «Москит» и П-800 «Оникс».

П-270 «Москит»
В зависимости от скорости, которую они могут развивать, ПВРД делятся на три типа:
Дозвуковые ПВРД используются для полетов со скоростью, не превышающей звуковой. Они имеют наиболее простую конструкцию, описанную выше, и отличаются довольно низким КПД, что объясняется низкой степенью сжатия воздуха в диффузоре. Диапазон их скоростей находится в пределах 0,5-1М (М – число Маха), если скорость ниже, двигатель перестает работать. Низкий КПД, ограничение по скорости, необходимость первоначального разгона – все это делает дозвуковые ПВРД малоэффективными, поэтому они практически не используются.
Сверхзвуковые ПВРД развивают скорость в пределах от 1 до 5М. Их легко узнать по характерному конусу, который выступает в передней части и предназначен для скачкообразного торможения воздушного потока. Такие конусы называются центральным телом и обеспечивают внешнее сжатие. При движении на сверхзвуковых скоростях поток воздуха попадает на конусную поверхность и тормозится, причем торможение происходит в виде резкого скачка в несколько этапов (обычно не более 4-х скачков). Скорость при этом остается сверхзвуковой. Далее воздушный поток попадает в диффузор, где продолжает сжиматься и тормозиться до дозвуковой скорости.
Конусы могут заменяться плоскими входными устройствами двухмерного течения без центрального тела. Скачкообразное повышение давления в этом случае обеспечивается сложной формой внутреннего канала. Именно сверхзвуковые ПВРД нашли широкое применение в военной авиации. По своим характеристикам они сравнимы с другими типами ВРД, что в сочетании с простой конструкцией делает их незаменимыми в определенной сфере. Степень сжатия воздуха в таких двигателях сравнима со степенью сжатия в компрессорах ТРД. Правда, диапазон скоростей, на которых они достигают наибольшей эффективности, находится в узких пределах от 3 до 5М.
Гиперзвуковые ПВРД – это пока только научные разработки авиаконструкторов. На сегодняшний день еще нет ни одного экспериментального рабочего образца этих двигателей, диапазон скоростей которых должен быть выше 5М. Его принципиальное отличие от двух предыдущих типов заключается в том, что поток воздуха проходит через диффузор и камеру сгорания со сверхзвуковой скоростью. Сечение всего тракта двигателя постоянно расширяется; поток, проходя по нему, тормозится лишь частично, а при сгорании топлива дополнительно ускоряется, так что его скорость на выходе больше, чем на входе. Основной проблемой при разработке таких двигателей является организация сгорания топлива в условиях сверхзвукового воздушного потока.
Если сравнивать рабочие характеристики ПВРД и других типов реактивных двигателей, можно сделать вывод, что дозвуковые ПВРД полностью проигрывают своим ближайшим «родственникам» по мощности и КПД. А вот сверхзвуковые модели вполне конкурентоспособные: их термический КПД выше, чем у других реактивных моторов.
К достоинствам прямоточного ВРД несомненно стоит отнести простоту конструкции и минимальное количество составляющих элементов, а значит, и сравнительно низкую себестоимость. Кроме этого:
Недостатки:
Использование ПВРД на пилотируемых самолетах нецелесообразно, ведь для их запуска нужны дополнительные двигатели. Намного проще сразу установить, например, ТРД. Именно поэтому их применение сводится к установке на крылатые ракеты, летающие мишени и непилотируемые самолеты, летающие со скоростью в пределах от 2 до 5М. В основном это «одноразовые» двигатели, что вполне логично, учитывая их невысокую стоимость и простую конструкцию. Запуск аппаратов с ПВРД осуществляется за счет их разгона до рабочей скорости с помощью самолетов-носителей или ракетных ускорителей.
Гиперзвуковые ПВРД планируется использовать на космических аппаратах, но пока это только теория.
Несмотря на то, что использование ПВРД в настоящее время ограничено, постоянно ведутся работы по улучшению их рабочих характеристик и созданию новых моделей.
Последняя разработка является двигатель Sabre частной фирмы Reaction Engines.

Суть данного двигателя в том, что традиционные двигатели, которые сегодня применяются в авиации, для полета на гипер скоростях требуют спецрезервуаров с жидким кислородом, если самолет развивает в полете скорость более 3000 км/ч. Обыкновенный воздух на таких скоростях нагревается до очень высоких температур, порядка 1000 градусов по Цельсию, что резко понижает термическое КПД. Особенность двигателя Sabre в том, что позволяет применять атмосферный воздух вместо жидкого кислорода. Когда воздух проходит сквозь двигатель, он сжимается и разогревается, в это время он попадает в холодильник, который оснащен целой системой трубок, которые наполняются гелием эти трубки, гелий охлаждает воздух до необходимой температуры. У двигателя Sabre есть одна особенность. Он в состоянии работать в 2-х режимах: как реактивный двигатель и как ракетный двигатель. Устанавливаться он будет на самолете Skylon. Данная аппарат сможет разогнаться в атмосфере в 5 раз быстрее скорости звука и в 25 раз в открытом космическом пространстве.

Skylon готовиться как космический самолет, способный выводить спутники на низкую орбиту. При этом это будет очень выгодная технология. По словам Алана Бонда, являющегося основателем компании, суммы, которые требуются для запуска спутников и других похожих миссий, могут уменьшиться сразу на 95% в том случае, если будет налажено коммерческое производство двигателей Sabre.
zewerok.ru

Возможный вид гиперзвукового летательного аппарата HCV
DARPA
Американская компания Aerojet Rocketdyne получила заказ Агентства перспективных оборонных разработок (DARPA) Пентагона на проведение демонстрационных испытаний комбинированной гиперзвуковой двигательной установки на основе турбореактивного двигателя. Как пишет Aviation Week, такая силовая установка должна будет разгонять перспективные летательные аппараты с нуля до более чем пяти чисел Маха (6,2 тысячи километров в час).
Сегодня создание гиперзвуковых летательных аппаратов сопряжено с несколькими сложностями. Одной из главных является создание двигателя, который мог бы разгонять такой летательный аппарат от нуля километров в час до скорости гиперзвука. Гиперзвуковой считается скорость, превышающая скорость звука по меньшей мере в пять раз. Существующие сегодня разные виды двигателей могут работать только в своем относительно узком диапазоне скоростей; универсальной двигательной установки пока не существует.
Так, двухконтурные реактивные двигатели, устанавливаемые на истребители, в силу своих конструктивных особенностей не могут разгонять самолет быстрее 2,2 числа Маха. В то же время, рабочие прототипы гиперзвуковых прямоточных воздушно-реактивных двигателей начинают стабильно работать на скоростях полета более четырех чисел Маха, когда становится возможным поддерживать сверхзвуковой воздушный поток сквозь силовую установку. Теоретическим пределом скорости для гиперзвукового двигателя являются 24 числа Маха.
Новый американский комбинированный двигатель будет способен работать во всем диапазоне возможных для гиперзвукового летательного аппарата скоростей. Сам двигатель, разработкой которого Aerojet Rocketdyne занимается с 2012 года, не будет иметь принципиальных отличий от схем комбинированных силовых установок, создаваемых другими разработчиками. Он будет сочетать в себе турбореактивный двигатель и прямоточные сверхзвуковую и гиперзвуковую воздушно-реактивные двигательные установки, объединенные общими воздухозаборником и соплом.

Схема комбинированного гиперзвукового двигателя
DARPA
По такой схеме, в частности, для перспективного гиперзвукового беспилотника SR-72 создает двигатель американская компания Lockheed Martin. Такую же схему для своей комбинированной гиперзвуковой установки избрал и китайский Исследовательский институт машинного оборудования Пекина. Отличием двигателя Aerojet Rocketdyne станет использование в его конструкции уже существующего стандартного турбореактивного двигателя типа Rolls-Royce F405 Adour.По условиям контракта DARPA, американской компании предстоит найти такие технические решения, которые позволят повысить верхний предел скорости турбореактивного двигателя и понизить скоростную границу прямоточных воздушно-реактивных установок. Кроме того, в рамках этого же проекта должна быть создана и испытана система управления температурными режимами комбинированного двигателя на всех этапах полета. Как ожидается, первые испытания общих воздухозаборника и сопла и интеграция турбореактивного двигателя начнутся в 2018 году.
В декабре прошлого года компания Aerojet Rocketdyne получила контракт Национальной лаборатории энергетических технологий США на разработку новой газотурбинной энергетической установки на базе ротационного детонационного двигателя. Работы, по итогам которых будет создан прототип новой установки, планируется завершить к середине 2019 года. По предварительной оценке, газотурбинный двигатель нового типа будет иметь по меньшей мере на пять процентов лучшие характеристики, чем обычные такие установки.
В новой газотурбинной установке, разрабатываемом Aerojet Rocketdyne, горение топливно-воздушной смеси в камере сгорания будет детонационным. Так называется процесс, при котором фронт горения распространяется по веществу со сверхзвуковой скоростью. При детонации выделяется существенно большее количество энергии, чем при дефлаграции (дозвуковом горении) — это связано с тем, что в первом случае топливо сгорает полнее. В новой установке детонация в камере сгорания будет постоянной, что позволит существенно упростить конструкцию.
Продукты сгорания в ротационном детонационном двигателе покидают камеру сгорания постоянно. Это позволяет использовать их в качестве газогенератора в газотурбинной установке. На разработку детонационной газотурбинной установки планируется потратить 6,8 миллиона долларов. Помимо Aerojet Rocketdyne к проекту новой детонационной газотурбинной установки будут привлечены несколько американских университетов. В частности, в Университете Пердью будут проводиться испытания детонационного газогенератора совместно с многокаскадной турбиной.
Василий Сычёв
nplus1.ru
 Огневые испытания ПВРД в лаборатории НАСА
Огневые испытания ПВРД в лаборатории НАСА Прямоточный воздушно-реактивный двигатель (ПВРД) — реактивный двигатель, является самым простым в классе воздушно-реактивных двигателей (ВРД) по устройству. Относится к типу ВРД прямой реакции, в которых тяга создается исключительно за счёт реактивной струи, истекающей из сопла. Необходимое для работы двигателя повышение давления достигается за счёт торможения встречного потока воздуха. ПВРД неработоспособен при низких скоростях полёта, тем более — при нулевой скорости, для вывода его на рабочую мощность необходим тот или иной ускоритель.
В 1913 году француз Рене Лорин[en] получил патент на прямоточный воздушно-реактивный двигатель.
ПВРД привлекал конструкторов простотой своего устройства, но главное — своей потенциальной способностью работать на гиперзвуковых скоростях и в самых высоких, наиболее разреженных слоях атмосферы, то есть в условиях, в которых ВРД других типов неработоспособны или малоэффективны. В 1930-х годах с этим типом двигателей проводились эксперименты в США (Уильям Эвери), в СССР (Ф. А. Цандер, Б. С. Стечкин, Ю. А. Победоносцев).
В 1937 году французский конструктор Рене Ледюк[en] получил заказ от правительства Франции на разработку экспериментального самолёта с ПВРД. Эта работа была прервана войной и возобновилась после её окончания. 19 ноября 1946 года состоялся первый в истории полёт пилотируемого аппарата с маршевым ПВРД, Leduc 0.10[en]. Далее в течение 10 лет было изготовлено и испытано ещё несколько экспериментальных аппаратов этой серии, в том числе, пилотируемые Leduc 0.21[en] и Leduc 0.22[en], а в 1957 году правительство Франции отказалось от продолжения этих работ — бурно развивавшееся в то время направление турбореактивных двигателей представлялось более перспективным.
Обладая рядом недостатков для использования на пилотируемых самолётах (нулевая тяга при неподвижности, низкая эффективность на малых скоростях полёта), ПВРД является предпочтительным типом ВРД для беспилотных одноразовых снарядов и крылатых ракет, благодаря своей простоте, а следовательно, дешевизне и надёжности. Начиная с 1950-х годов, в США было создан ряд экспериментальных самолётов и серийных крылатых ракет разного назначения с этим типом двигателя.
В СССР с 1954 по 1960 год в ОКБ-301 под руководством генерального конструктора С. А. Лавочкина, разрабатывалась крылатая ракета «Буря», предназначавшаяся для доставки ядерных зарядов на межконтинентальные расстояния, и использовавшая в качестве маршевого двигателя ПВРД, разработанный группой М. М. Бондарюка, и имевший уникальные для своего времени характеристики: эффективная работа на скорости свыше М = 3 и на высоте 17 км. В 1957 году проект вступил в стадию лётных испытаний, в ходе которых выявился ряд проблем, в частности, с точностью наведения, которые предстояло разрешить, и на это требовалось время, которое трудно было определить. Между тем, в том же году на вооружение уже поступила МБР Р-7, имевшая то же назначение, разработанная под руководством С. П. Королёва. Это ставило под сомнение целесообразность дальнейшей разработки «Бури». Смерть С. А. Лавочкина в 1960 году окончательно похоронила проект.
Из числа более современных отечественных разработок можно упомянуть противокорабельные крылатые ракеты с маршевыми ПВРД: П-800 «Оникс», П-270 «Москит».
Рабочий процесс ПВРД кратко можно описать следующим образом. Воздух, поступая со скоростью полёта во входное устройство двигателя, затормаживается (на практике, до скоростей 30—60 м/с, что соответствует числу Маха 0,1—0,2), его кинетическая энергия преобразуется во внутреннюю энергию — его температура и давление повышаются.
В предположении того, что воздух — идеальный газ, и процесс сжатия является изоэнтропийным, степень повышения давления (отношение статического давления в заторможенном потоке к атмосферному) выражается уравнением
ppo=(1+k−12⋅Mn2)kk−1{\displaystyle {\frac {p}{p_{o}}}={\bigg (}1+{\frac {k-1}{2}}\cdot M_{n}^{2}{\bigg )}^{\frac {k}{k-1}}} (5)где
p{\displaystyle p} — давление в полностью заторможенном потоке; po{\displaystyle p_{o}} — атмосферное давление; Mn{\displaystyle M_{n}} — полётное число Маха (отношение скорости полёта к скорости звука в окружающей среде), k{\displaystyle k} — показатель адиабаты, для воздуха равный 1,4.На выходе из входного устройства, при входе в камеру сгорания рабочее тело имеет максимальное на всём протяжении проточной части двигателя давление.
Сжатый воздух в камере сгорания нагревается за счёт окисления подаваемого в неё топлива, внутренняя энергия рабочего тела при этом возрастает. Затем рабочее тело сначала, сжимаясь в сопле, достигает звуковой скорости, а потом, расширяясь — сверхзвуковой, ускоряется и истекает со скоростью большей, чем скорость встречного потока, что и создаёт реактивную тягу.
 Схема устройства ПВРД на жидком топливе:
Схема устройства ПВРД на жидком топливе: Схема устройства твердотопливного ПВРД
Схема устройства твердотопливного ПВРД Зависимость тяги ПВРД от скорости полёта определяется несколькими факторами:
 Препарированный ПВРД «Тор» ракеты «Бладхаунд». Хорошо видны входное устройство и вход в камеру сгорания.
Препарированный ПВРД «Тор» ракеты «Бладхаунд». Хорошо видны входное устройство и вход в камеру сгорания. В общем, зависимость тяги ПВРД от скорости полёта может быть представлена следующим образом: пока скорость полёта значительно ниже скорости истечения реактивной струи, тяга растёт с ростом скорости полёта (вследствие повышения расхода воздуха, давления в камере сгорания и термического КПД двигателя), а с приближением скорости полёта к скорости истечения реактивной струи тяга ПВРД падает, миновав некоторый максимум, соответствующий оптимальной скорости полёта.
Сила тяги ПВРД определяется выражением
P=dmadt⋅(ve−v)+dmfdt⋅ve{\displaystyle P={\frac {dm_{a}}{dt}}\cdot (v_{e}-v)+{\frac {dm_{f}}{dt}}\cdot v_{e}}Где P{\displaystyle P} — сила тяги, v{\displaystyle v} — скорость полёта, ve{\displaystyle v_{e}} — скорость реактивной струи относительно двигателя, dmfdt{\displaystyle {\frac {dm_{f}}{dt}}} — секундный расход горючего.
Секундный расход воздуха:
dmadt=ρ⋅dVdt=ρ⋅S⋅dldt=ρ⋅S⋅v{\displaystyle {\frac {dm_{a}}{dt}}=\rho \cdot {\frac {dV}{dt}}=\rho \cdot S\cdot {\frac {dl}{dt}}=\rho \cdot S\cdot v} ,где
ρ{\displaystyle \rho } — плотность воздуха (зависит от высоты), dVdt{\displaystyle {\frac {dV}{dt}}} — объём воздуха, который поступает в воздухозаборник ПВРД за единицу времени, S{\displaystyle S} — площадь сечения входа воздухозаборника, v{\displaystyle v} — скорость полёта.Можем определить секундный расход массы рабочего тела для идеального случая. когда горючее полностью сгорает и полностью используется кислород воздуха в процессе горения:
dmdt=dmadt+dmfdt=dmadt+1L⋅dmadt=dmadt⋅(1+1L){\displaystyle {\frac {dm}{dt}}={\frac {dm_{a}}{dt}}+{\frac {dm_{f}}{dt}}={\frac {dm_{a}}{dt}}+{\frac {1}{L}}\cdot {\frac {dm_{a}}{dt}}={\frac {dm_{a}}{dt}}\cdot (1+{\frac {1}{L}})} ,где
dmadt{\displaystyle {\frac {dm_{a}}{dt}}} — секундный расход воздуха, dmfdt{\displaystyle {\frac {dm_{f}}{dt}}} — секундный расход горючего, L{\displaystyle L} — стехиометрический коэффициент смеси горючего и воздуха.Конструктивно ПВРД имеет предельно простое устройство. Двигатель состоит из камеры сгорания, в которую из диффузора поступает воздух, а из топливных форсунок — горючее. Заканчивается камера сгорания входом в сопло, как правило, суживающееся-расширяющееся.
С развитием технологии смесевого твёрдого топлива, оно стало применяться в ПВРД. Топливная шашка с продольным центральным каналом размещается в камере сгорания. Рабочее тело, проходя по каналу, постепенно окисляет топливо с его поверхности, и нагревается само. Использование твёрдого топлива ещё более упрощает конструкцию ПВРД: ненужной становится топливная система. Состав смесевого топлива для ПВРД отличается от используемого в ракетных твердотопливных двигателях. Если для последних большую часть топлива составляет окислитель, то для ПВРД он добавляется лишь в небольшом количестве для активизации процесса горения. Основную часть наполнителя смесевого топлива ПВРД составляет мелкодисперсный порошок алюминия, магния или бериллия, теплота окисления которых значительно превосходит теплоту сгорания углеводородных горючих. Примером твердотопливного ПВРД может служить маршевый двигатель противокорабельной крылатой ракеты П-270 «Москит».
В зависимости от скорости полёта ПВРД подразделяются на дозвуковые, сверхзвуковые и гиперзвуковые. Это разделение обусловлено конструктивными особенностями каждой из этих групп.
Дозвуковые ПВРД предназначены для полётов на скоростях с числом Маха от 0,5 до 1. Торможение и сжатие воздуха в этих двигателях происходит в расширяющемся канале входного устройства — диффузоре.
Эти двигатели характеризуются крайне низкой эффективностью. При полёте на скорости М = 0,5 степень повышения давления в них (как следует из формулы 2) равна 1,186, вследствие чего их идеальный термический КПД (в соответствии с формулой (3)) составляет всего 4,76 %, а с учётом потерь в реальном двигателе эта величина становится почти равной 0. Это означает, что на скоростях полёта при M < 0,5 ПВРД практически неработоспособен. Но и на предельной для дозвукового диапазона скорости, то есть при М → 1, степень повышения давления составляет лишь 1,89, а идеальный термический КПД — лишь 16,7 %, что в 1,5 раза меньше, чем у реальных поршневых ДВС, и вдвое меньше, чем у газотурбинных двигателей. К тому же и поршневые, и газотурбинные двигатели эффективны при работе на месте.
По этим причинам дозвуковые прямоточные двигатели оказались неконкурентоспособными в сравнении с авиадвигателями других типов и в настоящее время серийно не выпускаются.
Сверхзвуковые ПВРД (СПВРД) предназначены для полётов в диапазоне чисел Маха 1 < M < 5.
Торможение сверхзвукового газового потока происходит всегда разрывно (скачкообразно) — с образованием ударной волны, называемой также скачком уплотнения. Процесс сжатия газа на фронте ударной волны не является изоэнтропийным, вследствие чего в нём имеют место необратимые потери механической энергии, и степень повышения давления в нём меньше, чем в идеальном — изоэнтропийном процессе. Чем интенсивнее скачок уплотнения, то есть чем больше изменение скорости потока на его фронте, — тем больше потери давления, которые могут превышать 50 %.
 Процесс торможения сверхзвукового потока во входном устройстве конического течения, внешнего сжатия с тремя скачками уплотнения. М — график изменения числа Маха в потоке; p — график изменения статического давления.
Процесс торможения сверхзвукового потока во входном устройстве конического течения, внешнего сжатия с тремя скачками уплотнения. М — график изменения числа Маха в потоке; p — график изменения статического давления.  Беспилотный разведчик Lockheed D-21B (США). ПВРД с осесимметричным входным устройством с центральным телом.
Беспилотный разведчик Lockheed D-21B (США). ПВРД с осесимметричным входным устройством с центральным телом.  Плоские входные устройства внутреннего сжатия ПВРД крылатой ракеты воздух-земля ASMP[en] (Франция)
Плоские входные устройства внутреннего сжатия ПВРД крылатой ракеты воздух-земля ASMP[en] (Франция) Потери давления удаётся минимизировать за счёт организации сжатия не в одном, а в нескольких (обычно, не более 4) последовательных скачках уплотнения меньшей интенсивности, после каждого из которых (кроме последнего), скорость потока снижается, оставаясь сверхзвуковой. Это возможно, если все скачки (кроме последнего) являются косыми, фронт которых наклонён к вектору скорости потока (косой скачок уплотнения образуется, когда сверхзвуковой поток встречается с препятствием, поверхность которого наклонена к вектору скорости воздушного потока). В промежутках между скачками параметры потока остаются постоянными. В последнем скачке (всегда прямом — нормальном к вектору скорости воздушного потока) скорость становится дозвуковой, и дальнейшее торможение и сжатие воздуха происходит непрерывно в расширяющемся канале диффузора.
В случае, если входное устройство двигателя находится в зоне невозмущённого потока, например, в носовом окончании летательного аппарата, или на консоли на достаточном удалении от фюзеляжа, оно исполняется осесимметричным и снабжается центральным телом — длинным острым «конусом», выступающим из обечайки, назначение которого состоит в создании во встречном потоке системы косых скачков уплотнения, обеспечивающих торможение и сжатие воздуха ещё до поступления его в канал входного устройства — так называемое внешнее сжатие. Такие входные устройства называются также устройствами конического течения, потому что поток воздуха в них имеет коническую форму. Коническое центральное тело может быть снабжено механическим приводом, позволяющим смещать его вдоль оси двигателя, оптимизируя тем самым торможение воздушного потока на различных скоростях полета. Такие входные устройства именуются регулируемыми.
При установке двигателя на нижней (боковой) стенке фюзеляжа, или под крылом летательного аппарата, то есть в зоне аэродинамического влияния его элементов, обычно применяются плоские входные устройства двухмерного течения, имеющие прямоугольное поперечное сечение, без центрального тела. Система скачков уплотнения в них обеспечивается благодаря внутренней форме канала. Они называются также устройствами внутреннего или смешанного сжатия, так как внешнее сжатие частично имеет место и в этом случае — в скачках уплотнения, образованных у носового окончания и/или у передней кромки крыла летательного аппарата. Регулируемые входные устройства прямоугольного сечения имеют меняющие своё положение клинья внутри канала.
В сверхзвуковом диапазоне скоростей ПВРД значительно более эффективен, чем в дозвуковом. Например, на скорости М = 3 для идеального ПВРД степень повышения давления по формуле (2) составляет 36,7, что сравнимо с показателями самых высоконапорных компрессоров турбореактивных двигателей, а термический КПД теоретически, по формуле (3), достигает 64,3 %. У реальных ПВРД эти показатели ниже, но даже с учётом потерь, в диапазоне полётного числа Маха от 3 до 5 СПВРД превосходят по эффективности ВРД всех других типов.
При торможении встречного потока воздуха он не только сжимается, но и нагревается, и его абсолютная температура при полном торможении (в изоэнтропийном процессе) выражается формулой
T=To⋅(1+k−12⋅Mn2){\displaystyle T=T_{o}\cdot (1+{\frac {k-1}{2}}\cdot M_{n}^{2})}где Tо — температура окружающего невозмущённого потока. При М = 5 и Tо = 273 K (что соответствует 0 °C) температура заторможенного рабочего тела достигает 1638 К, при М = 6 — 2238 К, а с учётом трения и скачков уплотнения в реальном процессе — ещё выше. При этом дальнейший нагрев рабочего тела за счёт сжигания топлива становится проблематичным из-за ограничений, накладываемых термической устойчивостью конструкционных материалов, из которых изготовлен двигатель. Потому скорость, соответствующая М = 5, считается предельной для СПВРД.
 Экспериментальный гиперзвуковой летательный аппарат X-43 (рисунок художника)
Экспериментальный гиперзвуковой летательный аппарат X-43 (рисунок художника)  Иллюстрация газодинамических процессов в плоском ГПВРД с соплом SERN[en] Сжатие воздуха происходит в двух скачках уплотнения: внешнем, образованным у носового окончания аппарата, и внутреннем — у передней кромки нижней стенки двигателя. Оба скачка — косые, и скорость потока остаётся сверхзвуковой.
Иллюстрация газодинамических процессов в плоском ГПВРД с соплом SERN[en] Сжатие воздуха происходит в двух скачках уплотнения: внешнем, образованным у носового окончания аппарата, и внутреннем — у передней кромки нижней стенки двигателя. Оба скачка — косые, и скорость потока остаётся сверхзвуковой. Гиперзвуковым ПВРД (ГПВРД, англоязычный термин — scramjet) называется ПВРД, работающий на скоростях полёта свыше М = 5 (верхний предел точно не устанавливается).
На начало XXI века этот тип двигателя является экспериментальным: не существует ни одного образца, прошедшего лётные испытания, подтвердившие практическую целесообразность его серийного производства.
Торможение потока воздуха во входном устройстве ГПВРД происходит лишь частично, так что на протяжении всего остального тракта движение рабочего тела остаётся сверхзвуковым. При этом бо́льшая часть исходной кинетической энергии потока сохраняется, а температура после сжатия относительно низка, что позволяет сообщить рабочему телу значительное количество тепла. Проточная часть ГПВРД расширяется на всём её протяжении после входного устройства. Горючее вводится в сверхзвуковой поток со стенок проточной части двигателя. За счёт сжигания горючего в сверхзвуковом потоке рабочее тело нагревается, расширяется и ускоряется, так что скорость его истечения превышает скорость полёта.
Двигатель предназначен для полётов в стратосфере. Возможное назначение летательного аппарата с ГПВРД — низшая ступень многоразового носителя космических аппаратов.
Организация горения топлива в сверхзвуковом потоке составляет одну из главных проблем создания ГПВРД.
Существует несколько программ разработок ГПВРД в разных странах, все — в стадии теоретических изысканий или предпроектных экспериментов.
ПВРД неработоспособен при низких скоростях полёта, тем более — при нулевой скорости. Для достижения начальной скорости, при которой он становится эффективным, аппарат с этим двигателем нуждается во вспомогательном приводе, который может быть обеспечен, например, твердотопливным ракетным ускорителем, или самолётом-носителем (самолетом-разгонщиком), с которого запускается аппарат с ПВРД.
Неэффективность ПВРД на малых скоростях полёта делает его практически неприменимым на пилотируемых самолётах с неядерной двигательной системой[2], но для беспилотных, в том числе боевых (в частности, крылатых ракет), одноразового применения, летающих в диапазоне скоростей 2 < М < 5, благодаря своей простоте, дешевизне и надёжности, он предпочтителен. Также ПВРД используются на летающих мишенях. Основным конкурентом ПВРД в этой нише является ракетный двигатель.
Во второй половине 1950-х годов, в эпоху холодной войны, в США и СССР разрабатывались проекты ПВРД с ядерным реактором.
Источником энергии этих ПВРД (в отличие от остальных ВРД) является не химическая реакция горения топлива, а тепло, вырабатываемое ядерным реактором в камере нагрева рабочего тела. Воздух из входного устройства в таком ПВРД проходит через активную зону реактора, охлаждая его, нагревается сам до рабочей температуры (около 3000 К), а затем истекает из сопла со скоростью, сравнимой со скоростями истечения для самых совершенных химических ЖРД[3] . Возможное назначения летательного аппарата с таким двигателем:
В обеих странах были созданы компактные малоресурсные ядерные реакторы, которые вписывались в габариты большой ракеты. В США по программам исследований ядерного ПВРД «Pluto» и «Tory» в 1964 году были проведены стендовые огневые испытания ядерного прямоточного двигателя «Tory-IIC» (режим полной мощности 513 МВт в течение пяти минут с тягой 156 кН). Лётные испытания не проводились, программа была закрыта в июле 1964 года. Одна из причин закрытия программы — совершенствование конструкции баллистических ракет с химическими ракетными двигателями, которые вполне обеспечили решение боевых задач без применения схем с сравнительно дорогостоящими ядерными ПВРД.
Тем не менее, ядерный ПВРД перспективен как двигательная система для одноступенчатых воздушно-космических самолётов и скоростной межконтинентальной тяжёлой транспортной авиации. Этому способствует возможность создания ядерного ПВРД, способного работать на дозвуковых и нулевых скоростях полёта в режиме ракетного двигателя, используя бортовые запасы рабочего тела. То есть, например, воздушно-космический самолёт с ядерным ПВРД стартует (в том числе взлетает), подавая в двигатели рабочее тело из бортовых (или подвесных) баков и, уже достигнув скоростей от М = 1, переходит на использование атмосферного воздуха.
В России, по сделанному президентом В. В. Путиным в начале 2018 года заявлению, «состоялся успешный пуск крылатой ракеты с ядерной энергоустановкой».[4]
ru-wiki.org

Модель индийского перспективного гиперзвукового аппарата
Bin im Garten / wikipedia.org
Индийская организация космических исследований провела первые успешные испытания гиперзвуковых прямоточных воздушно-реактивных двигателей, сообщает Defense Aerospace. Во время летных испытаний силовых установок исследователи проверили зажигание на сверхзвуковой скорости, устойчивое горение топлива, механизм забора воздуха и систему впрыска топлива.
Гиперзвуковой двигатель отличается от обычных тем, что сгорание топлива в его камере происходит в сверхзвуковом воздушном потоке. Воздух для процесса горения подается в камеру прямотоком без использования дополнительных компрессоров: в полете набегающий поток воздуха попадает в воздухозаборник, затем в заужающуюся компрессорную камеру, а после этого — в камеру сгорания.
Двигатели такого типа способны работать при скорости полета не менее четырех-пяти чисел Маха (4,9-6,2 тысячи километров в час). Считается, что верхний предел скорости гиперзвукового двигателя составляет около 24 чисел Маха. Для полета на больших скоростях двигателю потребуется впрыск дополнительных порций окислителя.
Использование гиперзвуковых прямоточных воздушно-реактивных двигателей в ракетах-носителях позволит отказаться от части жидкого окислителя, который будет необходим лишь на заатмосферном участке полета. Преимуществом гиперзвуковых двигателей является то, что они достаточно мощны и используют для сжигания топлива атмосферный воздух.
Испытание индийских гиперзвуковых двигателей, работающих на водороде и атмосферном воздухе, состоялось на полигоне Шрихарикота на востоке страны. С него стартовала немного измененная двухступенчатая твердотопливная ракета-носитель ATV. На второй ступени была смонтирована установка с двумя гиперзвуковыми двигателями. Запуск производился по полигону в Бенгальском заливе в 320 километрах от Шрихарикоты.
Общая продолжительность полета второй ступени составила 300 секунд. После того как ракета стартовала и развила скорость в шесть чисел Маха, система управления включила зажигание гиперзвуковых двигателей. Блок с двигателями поднялся на высоту 70 километров. Продолжительность работы силовых установок составила пять секунд.
Весь полет от старта с Шрихарикоты до падения в Бенгальском заливе проходил в автоматическом режиме. Следует отметить, что целью первого испытания гиперзвуковых двигателей была проверка стабильности их работы, а не возможности силовых установок разгонять носители до гиперзвуковых скоростей.
Сегодня разработкой гиперзвуковых летательных аппаратов занимаются несколько стран мира, в первую очередь Россия и США. Обе эти страны за прошедшие несколько лет уже испытали несколько гиперзвуковых аппаратов. Гиперзвуковые двигатели в будущем планируется устанавливать на боевые ракеты, ракеты-носители, беспилотные летательные аппараты и истребители.
Василий Сычёв
nplus1.ru
68. На пути к гиперзвуку. История освоения гиперзвуковых скоростей


1. Введение
2. Описание Х-1
3. Гиперзвуковой двигатель
4. Строение
5. Принцип работы
6. Характеристика потока
7. Проблемы ГПВРД
8. Русский изобретатель
9. Вывод
10. Заключение
11. Литература
Введение
К середине Второй Мировой Войны пришла эра реактивной авиации. Началась борьба за сверхзвук. Первый в мире реактивный самолет - МЕ-163А «КОМЕТ». Но он был неэффективен в реальном бою из-за очень малого радиуса действия. Будущее оказалось за турбореактивными двигателями.
1943 год - американская компания Bell приступает к созданию самолета Х-1, рассчитанного на преодоление скорости звука. Х-1 крепился к бомбардировщику В-29 и отделялся от него на большой высоте. 14 октября 1947 года Чак Игер на Х-1 преодолел звуковой барьер. Дорога к исследованию сверхзвуковых и гиперзвуковых скоростей была открыта. Это было начало эпохи развития ГПРВД — гиперзвуковой прямоточный воздушно-реактивный двигатель.
В начале 60-х годов СССР и США приступили к созданию самолетов, способных лететь с трехкратной скоростью звука. США и СССР создали два уникальных летательных аппарата: стратегический разведчик SR 71 A BLACK BIRD, который в 1976 году - достиг скорости 3539 км/ч, и в СССР истребитель-перехватчик Миг-25, который в 1967 году развил скорость 2920 км/ч.
В начале 70-х годов высокие скорости начинает осваивать пассажирская авиация. 31 декабря 1968 года состоялся первый полет сверхзвукового пассажирского самолета. В 1973 г. его предсерийный образец показан на авиационной выставке в Ле-Бурже. ТУ-144 мог летать с пассажирами со скоростью 2500 км/ч, на дальность свыше 3000 км.
ТРД не развивает тягу, достаточную для разгона самолета до гиперзвуковой скорости. Поэтому был разработан новый ГПВРД, который эффективен вплоть до скоростей в 10-15 скоростей звука. В 2004 году с летящего на высоте 12 км. В-52 стартовал беспилотный аппарат Х-43А, и на нем была достигнута скорость в 9,8 М, - 11263 км/ч. На такой скорости путешествие из Москвы в Нью-Йорк заняло бы 41 минуту. Перспективной является еще одна разработка США - FALCON, которая представляет собой самолет-носитель и гиперзвуковой планер с развиваемой скоростью 10М. Учитывая сложность технических проблем создание полномасштабной системы планируется не ранее 2030 года.
Из всех государств мира Россия обладает необходимым научно-техническим заделом, позволяющим составить конкуренцию США. Ведь именно в России был совершен первый летный эксперимент с ГПВРД под названием «Холод». На последних международных аэрокосмических салонах МАКС Россия демонстрировала несколько перспективных проектов гиперзвуковых аппаратов - «летающих лабораторий».
Как показывает краткий исторический анализ, любая новая техника, прежде всего, проявляется в расчете на реализацию военных целей. В современных условиях требуется оружие быстрое, точное и не вызывающее ненужных жертв и разрушений. Таким оружием могут стать гиперзвуковые авиационные системы нового поколения, однако для реализации этих систем требуются определенные, так называемые критические инновационные технологии.
Исторический анализ подтверждает, что только на основе разработанных и освоенных критических технологий можно создавать ГЛА различного назначения, не только военного, но и гражданского, которые станут образцами авиационно-космической техники XXI в. и позволят приступить к активному использованию области гиперзвуковых скоростей полета с числами Маха 5–15 в диапазоне высот 18–45 км.

Описание Х-1
Расчётная скорость полёта самолёта Х-1 на высоте 24 400 м составляла 2720 км/час. В 1946 г. был построен первый экземпляр самолёта Х-1, имевший обозначение Х5-1. Экспериментальный ракетный самолёт Bell Х-1 представляет собой свободнонесущий цельнометаллический моноплан. Крыло самолёта прямое, с обрезанными концами и с относительной толщиной 8 %. На концевых частях крыла расположены обычные элероны, а между фюзеляжем и элеронами — посадочные щитки. Обшивка крыла изготовлена из дюралевых плит толщиной более 12,7 мм у корня и около 3,2 мм на концах. Для уменьшения вибраций при больших скоростях для самолёта спроектированы специальные демпферы. Конструкция самолёта рассчитана на перегрузки от +18 g до —10 g. Фюзеляж овального сечения, цельнометаллический, с герметической кабиной лётчика. Вход в кабину расположен с правой стороны перед крылом. Фонарь кабины не выступает из обводов фюзеляжа. По верху фюзеляжа от основания киля до фонаря проходит гребень. Хвостовое оперение, как и крыло, не имеет заметной стреловидности. Свободнонесущий стабилизатор с относительной толщиной 6 % установлен на 1/3 высоты киля с таким расчётом, чтобы вывести его из зоны турбулентности за крылом. Угол установки стабилизатора может изменяться в полёте при помощи винтового подъёмника. Рули высоты и направления имеют балансировку, а на руле направления, кроме того, установлен триммер.

Гиперзвуковой двигатель
Гиперзвуковой двигатель» (англ. Supersonic Combustion RAMJET — scramjet) — вариант прямоточного воздушно-реактивного двигателя (ПВРД), который отличается от обычного сверхзвуковым сгоранием. На больших скоростях для сохранения эффективности двигателя необходимо избежать торможения приходящего воздуха и производить сжигание топлива в сверхзвуковом воздушном потоке. Верхний предел скорости гиперзвукового ПВРД (ГПВРД) без использования дополнительного окислителя оценивается вМ=12—24. Исследования в рамках проекта «X-30» фирмы Роквелл в 80-х годах XX-го века установили верхнее значение скорости для работы ГПВРД, соответствующим М=17 в связи с обеспечением условий для сгорания в двигателе. Для сравнения, самый быстрый пилотируемый самолет со сверхзвуковым прямоточным воздушно-реактивным двигателем (СПВРД) «SR-71» (англ. Black Bird, «Чёрный дрозд») компании Локхид достигает скорости не выше М=3,4 из-за торможения воздушного потока в двигателе до дозвуковой скорости. Кроме этого, так как ГПВРД использует не окислитель, транспортируемый вместе с аппаратом, а атмосферный воздух, он обладает гораздо более высоким показателем эффективности двигателя — удельным импульсом по сравнению с любым из существующих ракетных двигателей.
Для работы гиперзвуковой ПВРД нуждается в проходящем сквозь него сверхзвуковом воздушном потоке, поэтому, так же как и сверхзвуковой ПВРД, этот тип двигателя имеет минимальную скорость, при которой он может функционировать, примерно равную М=7—8. Таким образом, аппарат с ГПВРД нуждается в другом способе ускорения до скорости, достаточной для работы гиперзвукового двигателя.

Строение
Любой гиперзвуковой ПВРД имеет инжекторы топлива, камеру сгорания, сопло и воздухозаборник, который сжимает приходящий поток воздуха. Иногда в двигатель также включают стабилизатор пламени (англ. flame holder), хотя температура торможения потока в области фокусирования волн плотности достаточно высока для самодостаточного горения. Другие двигатели используют пирофорные добавки, такие как силаны, с целью обхода проблем с устойчивостью сгорания. Часто используется изолятор между воздухозаборником и камерой сгорания для продления функционирования двигателя.

Принцип работы
До того как летательный аппарат с ГПВРД достигнет желаемых скоростей, его двигатель должен последовательно пройти через несколько режимов работы. Для разгона до скоростей порядка 3 Махов можно использовать одну из нескольких возможностей – к примеру, дополнительные газотурбинные двигатели либо же ракетные ускорители (как внутренние, так и внешние).
На скорости 3–4 Маха ГПРВД перестраивается с режима низкоскоростной тяги на такой режим, когда в двигателе формируются устойчивые скачки уплотнения, создающие на входе в камеру сгорания один или несколько участков воздушного потока на дозвуковой скорости. В традиционном ПВРД это обеспечивают воздухозаборник и диффузор – они снижают скорость потока до уровня ниже скорости звука за счет увеличения площади диффузора, таким образом на дозвуковых скоростях можно достичь полного сгорания смеси.
За камерой сгорания расположено суживающееся-расширяющееся сопло, которое и выдает необходимую тягу. В ГПРВД на выходе из камеры происходит «газовое тепловое дросселирование», которое не требует реального геометрического сужения сопла. Это сужение потока формируется благодаря смешиванию газов с воздухом и точно выверенному распределению потоков.
Пока самолет с ГПВРД на собственной тяге разгоняется от 3 до 8 Махов, в диапазоне от 5 до 7 Махов двигатель переходит на другой режим. Это переходный момент, когда двигатель работает и как традиционный ПВРД, и как гиперзвуковой. Рост температуры и давления в камере сгорания замедляется. В результате для нормальной работы становится достаточной более короткая зона предварительного сжатия. Скачки уплотнения сдвигаются от горловины воздухозаборника ближе к входу камеры сгорания.
Когда скорость переваливает за 5 Махов, режим сверхзвукового горения обеспечивает уже более высокую тягу, поэтому специфика двигателя требует, чтобы режим ГПВРД использовался до тех пор, пока аппарат не достигнет скорости в 5–6 Махов. На пороге примерно в 6 Махов торможение воздушного потока к дозвуковым скоростям приводит местами к почти полной его остановке, что вызывает резкие скачки давления и теплопередачи. Где-то в интервале между 5 и 6 Махами появление этих симптомов может служить сигналом для перехода на режим чистого ГПВРД. Когда скорость переваливает за 7 Махов, процесс сгорания уже не способен разделять воздушный поток, и двигатель начинает работать в режиме ГПВРД без скачков уплотнения перед камерой сгорания. Ударные волны от воздухозаборника распределяются вдоль всего двигателя. На скоростях выше 8 Махов законы физики требуют сверхзвукового режима сгорания, поскольку двигатель уже не сможет выдерживать давлений и температур, которые возникли бы при торможении воздушного потока до дозвуковых скоростей.

При работе ГПВРД на скоростях от 5 до 15 Махов встает несколько технических проблем. Это сложности смешивания горючего с воздухом, борьба с тепловыми перегрузками двигателя, в частности с перегревом всех передних кромок воздухозаборника. Для полетов на гиперзвуковых скоростях требуются особые конструкции и материалы.
Когда скорость впрыскиваемого горючего уравнивается со скоростью влетающего в камеру сгорания воздушного потока, а это происходит на скоростях около 12 Махов, смешивание горючего с воздухом становится весьма затруднительным. При еще более высоких числах Маха огромные температуры в камере сгорания вызывают распад молекул и их ионизацию. Эти процессы, накладываясь на и без того сложную картину воздушного потока, где происходит сверхзвуковое перемешивание, взаимодействие камеры сгорания с каналом воздухозаборника и действуют законы горения, делают почти невозможным расчет газовых потоков, режима подачи топлива и теплового баланса камеры сгорания.
В ходе гиперзвукового полета нагрев двигателя летательного аппарата зависит не только от работы камеры сгорания – свой вклад вносят и другие системы: насосы, гидравлика, электроника. Системы управления теплообменом в гиперзвуковых летательных аппаратах в основном сконцентрированы на двигателе, поскольку именно он испытывает максимальные тепловые нагрузки. Двигатель вообще создает много проблем – зона реактивного потока отличается огромными термическими, механическими и акустическими нагрузками, а плюс ко всему она заполнена исключительно коррозионно активной смесью из раскаленных продуктов сгорания и кислорода.
Если двигатель не охлаждать, температура камеры сгорания перевалит за 2760 градусов Цельсия, а это выше, чем точка плавления для большинства металлов. К счастью, с проблемой высоких температур удается справиться путем активного охлаждения, правильного подбора материалов и разработкой специальных высокотемпературных конструкций.

Схема устройства ПВРД на жидком топливе.
1. Встречный поток воздуха;
2. Центральное тело.
3. Входное устройство.
4. Топливная форсунка.
5. Камера сгорания.
6. Сопло.
7. Реактивная струя.
Характеристики потока
В то время как определение гиперзвукового потока достаточно спорно по причине отсутствия четкой границы между сверхзвуковым и гиперзвуковым потоками, ГПВРД может характеризоваться определенными физическими явлениями, которые уже не могут быть игнорированы при рассмотрении, а именно:
По мере увеличения скорости и соответствующих чисел Маха, плотность позади ударной волны также увеличивается, что соответствует уменьшению объема сзади от ударной волны благодаря сохранению массы. Поэтому, слой ударной волны, то есть объем между аппаратом и ударной волны становится тонким при высоких числах Маха, создавая тонкий приграничный слой вокруг аппарата.
Энтропийный слой
По мере увеличения чисел Маха, также увеличивается диссипация газа через слой ударной волны, что приводит к сильному градиенту энтропии и вихревому потоку, который смешивается с приграничным слоем.
Вязкое взаимодействие
Часть большой кинетической энергии, заключенной в воздушном потоке, при больших числах Маха преобразуется во внутреннюю энергию за счет вязкого взаимодействия. Увеличение внутренней энергии реализуется в росте температуры. Так как градиент давления, направленный по нормали к потоку в пределах приграничного слоя, приблизительно равен нулю для низких и умеренных чисел Маха, увеличение температуры приводит к уменьшению плотности. Таким образом, приграничный слой поверх аппарата растет и, как часто бывает, может слиться с тонким слоем ударной волны.
Высокотемпературный поток
Высокие температуры вызывают неравновесные химические свойства потока, которые заключаются в диссоциации молекул и ионизации атомов, что приводит к конвекции и радиационному теплообмену.

Проблемы ГПРВД
* В случае ГПВРД кинетическая энергия воздуха, поступающего в двигатель, является большой по сравнению с выделяемой энергией при экзотермическом взаимодействии топлива и окислителя из воздуха. При скорости М=25 тепло, выделяемое при сгорании топлива, составляет около 10% от общей энтальпии потока. Вне зависимости от используемого топлива, кинетическая энергия воздуха и теоретическая полезная энергия тепла от сгорания будут равняться друг другу примерно при скорости М=8. Таким образом, конструкция ГПВРД преследует прежде всего цель уменьшения трения, а не увеличения тяги.
* Высокая скорость делает сложным управление потоком внутри камеры сгорания (КС). Так как приходящий воздушный поток является сверхзвуковым, нет обратного распространения процессов, происходящих в КС. Это не позволяет регулировать тягу изменением размера входа в сопло (КС). Более того, весь проходящий со сверхзвуковой скоростью через камеру сгорания газ должен с минимальным трением смешаться с топливом и иметь достаточно времени для сгорания с целью последующего расширения в сопле и порождения тяги.
* Порядок впрыска топлива также является потенциально сложной проблемой. Одна из возможных схем циркуляции топлива выглядит следующим образом: топливо сжимается до 100 атм турбонасосом, нагревается фюзеляжем, проходит через турбину и затем оставшаяся часть давления используется инжекторами для впрыска топлива со скоростью, большей скорости проходящего воздушного потока в основании камеры сгорания. Потоки топлива образуют сеткоподобную структуру в проходящем потоке воздуха. Высокая турбулентность из-за большей скорости топлива приводит к дальнейшему перемешиванию. При этом, чем сложнее молекулы топлива, например, как у керосина, тем длиннее должен быть ГПВРД для завершения сгорания.
* Минимальное число Маха, при котором ГПВРД может работать, ограничено тем, что сжатый поток должен быть достаточно горячим для горения топлива и иметь давление, достаточно высокое для завершения реакции до того, как воздушная смесь покинет сопло. Для сохранения принадлежности двигателя к классу ГПВРД, сохранения его свойств и устойчивости работы, поток газа должен сохранять сверхзвуковую скорость на всех участках своего пути в двигателе. Степень сжатия напрямую связана со степенью торможения потока и определяет нижнюю границу использования. Если газ в двигателе затормаживается до скорости ниже М=1, то двигатель «глохнет», порождая ударные волны, при экспериментах хорошо заметные невооруженным глазом. Внезапное замедление потока воздуха в двигателе может привести к ускорению сгорания в КС, что способно вызвать разрушение ГПВРД. Кроме сжатия, на нижний предел скорости влияет также увеличение скорости звука в газе при росте температуры. На 2009 год считается, что нижний предел скорости использования «чистого» гиперзвукового ПВРД составляет М=6—8. Существуют проекты конструкций гибридных СПВРД/ГПВРД, которые предполагают трансформацию сверхзвукового двигателя в гиперзвуковой на скоростях М=3—6 и имеют более низкое значение предельной скорости.
Высокая стоимость лётных испытаний и невозможность полноценных наземных сдерживает развитие гиперзвуковых самолётов. Наземные испытания в основном сосредоточены на частичном моделировании условий полёта и производились в криогенных установках, газодинамических установках на базе ракетных двигателей, ударных тоннелях и плазмогенераторах, но все они лишь приближённо моделируют реальный полёт. Только в последнее время в вычислительной гидрогазодинамике было накоплено достаточно экспериментальных данных для реалистичного компьютерного моделирования с целью решения проблем работы аппаратов с ГПВРД, а именно для моделирования приграничного слоя воздуха, смешивания топлива с потоком воздуха; двухфазного течения потока; отрыва (отделения) потока; аэротермодинамики реального газа. Тем не менее, эта область все еще остается малоизученной областью. Кроме этого, моделирование кинетически ограниченного сгорания с участием таких быстрореагирующих топлив, как водород, требует значительных вычислительных ресурсов. Как правило, используются ограниченные модели с поиском численных решений «жёстких систем» дифференциальных уравнений, для которых необходим малый шаг интегрирования и поэтому требуется много машинного времени.

А теперь скажем несколько слов о том, кто внес свой вклад в развитие ГПВРД.
Русский изобретатель

Игорь Алексеевич Меркулов
Игорь Алексеевич Меркулов (1913-1991гг.) работал в ракетной технике с 1932г. - в ГИРДе, РНИИ, заводе "Авиахим", институте двигателей Академии Наук СССР и др. И.А.Меркулов работал конструктором 3-й бригады, руководимой Ю.А.Победоносцевым, участвовал в проектировании и летных испытаниях первых в мире воздушно-реактивных двигателей, установленных на артиллерийских снарядах. В 1939 г. Игорь Алексеевич спроектировал авиационные воздушно-реактивные двигатели прямоточного типа. В 1939-1940 гг. двигатели успешно прошли летные испытания, показав свою работоспособность и полную безопасность в эксплуатации. Испытания этих реактивных двигателей явились первыми в мире летными испытаниями авиационных прямоточных воздушно-реактивных двигателей. И.А.Меркулов один из создателей первого советского форсированного турбо-реактивного двигателя (ТРД) (1945-1946гг.), автор теории форсирования воздушно-реактивные двигатели (1951 г.) Автор теоремы об эквивалентности массы и энергии при формировании тяги воздушно-реактивные двигатели (1965 г.) Установил критерии параметрической оптимизации ионных ракет (1962 г.) Автор 60 научных работ по ракетодинамике, теории реактивных двигателей и истории ракетной техники. Один из организаторов и руководителей Комитета космонавтики ДОСААФ СССР. Организатор издания научных сборников "Реактивное движение" (1933-1938гг.) Автор 120 научно-популярных статей по ракетной технике и космонавтике. И.А.Меркулов вел большую работу по пропаганде трудов К.Э.Циолковского, с которым состоял в переписке. В фондах ГМИК имени К.Э.Циолковского хранятся несколько писем К.Э.Циолковского к И.А.Меркулову. Игорь Алексеевич продолжал работать над проблемами ракетной техники до конца своей жизни.

Вывод
В отличие от обычной ракеты, которая быстро и практически вертикально пролетает через атмосферу, или самолета, который летает на гораздо меньшей скорости, гиперзвуковой аппарат должен следовать траектории, которая обеспечивает режим работы ГПВРД, оставаясь в атмосфере при гиперзвуковой скорости. Аппарат с ГПВРД имеет в лучшем случае посредственное отношение тяги к весу аппарата, поэтому его ускорение мало? по сравнению с ракетами-носителями. Таким образом, время, проводимое в атмосферетакой космической системой, должно быть значительным и составлять от 15 до 30 мин. По аналогии с теплозащитой для аэродинамического торможения Спейс Шаттла при входе в атмосферу, теплозащита такой системы должна быть также значительной. Общее время аппарата в атмосфере при гиперзвуковых скоростях является более продолжительным по сравнению с одноразовой возвращаемой капсулой, но менее продолжительным по сравнению с космическим челноком.
Новые материалы предлагают хорошее охлаждение и теплозащиту при высоких температурах, но как правило относятся к абляционным материалам, которые постепенно теряются при использовании, унося с собой тепло. Таким образом, исследования в основном фокусируются на активном охлаждении корпуса, в которых хладагентпринудительно циркулирует в «теплонапряжённых» частях корпуса, отводя повышенную температуру от корпуса и предотвращяя его разрушение. Как правило, в качестве теплоносителя предлагается использовать топливо, во многом аналогично тому, как в современных ракетных двигателях используют топливо или окислитель при охлаждении сопла и камеры сгорания (КС). Добавление любой сложной охлаждающей системы приводит к увеличению веса и снижению эффективности системы в целом. Таким образом, необходимость активной системы охлаждения является сдерживающим фактором, снижающим эффективность и перспективность применения ГПВРД.

Заключение
Воздушное судно с ГПВРД должно значительно сократить время путешествия из одной точки в другую, потенциально сделав достижимой любую точки Земли в пределах 90мин. Оно имеет огромные перспективы развития и использования как в космосе, так и на земле. Однако при этом остаются вопросы по тому, смогут ли такие аппараты перевозить на себе достаточно топлива для совершения полетов на достаточно большие расстояния и смогут ли они летать на достаточной высоте, чтобы избежать связанных со сверхзвуковым полетом звуковых эффектов. Также остаются неопределенными вопросы, связанные с общей стоимостью таких полетов и возможностью многократного использования аппаратов после гиперзвукового полета.
С дальнейшим развитием ГПВРД многие мечты (и не только) могут стать реальностью….

Используемая литература
http://www.topwar.ru/1194-na-puti-k-giperzvuku.html
http://dic.academic.ru/dic.nsf/ruwiki/870114
http://dic.academic.ru/dic.nsf/ruwiki/870101
http://oko-planet.su/science/sciencediscussions/36869-na-puti-k-giperzvuku-giperzvukovye-samolety.html
http://www.trip-advice.com/ru/sovet-3648004.htm
http://ru.wikipedia.org/wiki/Bell_X-1
http://www.mai.ru/conf/aerospace/internetconf/modules.php?name=Forums&file=viewtopic&t=2282
Выполнил: Хорев Алексей (JIeT4uK)
olymp.as-club.ru
 (5)
(5) — давление в полностью заторможенном потоке; po{\displaystyle p_{o}}
— давление в полностью заторможенном потоке; po{\displaystyle p_{o}} — атмосферное давление; Mn{\displaystyle M_{n}}
— атмосферное давление; Mn{\displaystyle M_{n}} — полётное число Маха (отношение скорости полёта к скорости звука в окружающей среде), k{\displaystyle k}
— полётное число Маха (отношение скорости полёта к скорости звука в окружающей среде), k{\displaystyle k} — показатель адиабаты, для воздуха равный 1,4.
— показатель адиабаты, для воздуха равный 1,4. в камере сгорания, что влечёт за собой увеличение термического КПД, который для идеального ПВРД выражается формулой[1]
в камере сгорания, что влечёт за собой увеличение термического КПД, который для идеального ПВРД выражается формулой[1] (3)
(3)
 — сила тяги, v{\displaystyle v}
— сила тяги, v{\displaystyle v} — скорость полёта, ve{\displaystyle v_{e}}
— скорость полёта, ve{\displaystyle v_{e}} — скорость реактивной струи относительно двигателя, dmfdt{\displaystyle {\frac {dm_{f}}{dt}}}
— скорость реактивной струи относительно двигателя, dmfdt{\displaystyle {\frac {dm_{f}}{dt}}} — секундный расход горючего.
— секундный расход горючего.  ,
, — плотность воздуха (зависит от высоты), dVdt{\displaystyle {\frac {dV}{dt}}}
— плотность воздуха (зависит от высоты), dVdt{\displaystyle {\frac {dV}{dt}}} — объём воздуха, который поступает в воздухозаборник ПВРД за единицу времени, S{\displaystyle S}
— объём воздуха, который поступает в воздухозаборник ПВРД за единицу времени, S{\displaystyle S} — площадь сечения входа воздухозаборника, v{\displaystyle v}
— площадь сечения входа воздухозаборника, v{\displaystyle v} ,
, — секундный расход воздуха, dmfdt{\displaystyle {\frac {dm_{f}}{dt}}}
— секундный расход воздуха, dmfdt{\displaystyle {\frac {dm_{f}}{dt}}} — стехиометрический коэффициент смеси горючего и воздуха.
— стехиометрический коэффициент смеси горючего и воздуха.