Содержание
что это такое и как найти
Скольжение – это одна из основных характеристик электродвигателя. Она изменяется в зависимости от режима работы, нагрузки на валу и питающего напряжения. Давайте подробнее разберемся, что такое скольжение электродвигателя, от чего оно зависит и как определяется.
- Что это такое
- Величина скольжения в разных режимах работы
- Способы измерения
Что это такое
Принцип работы трехфазного асинхронного двигателя довольно прост. На обмотку статора подается питающее напряжение, которое создает магнитный поток, в каждой фазе он будет смещен на 120 градусов. При этом суммирующий магнитный поток будет вращающимся.
Обмотка ротора является замкнутым контуром, в ней наводится ЭДС и возникающий магнитный поток придает вращение ротору, в направлении движения магнитного потока статора. Вращающий электромагнитный момент пытается уравнять скорости вращения магнитных полей статора и ротора.
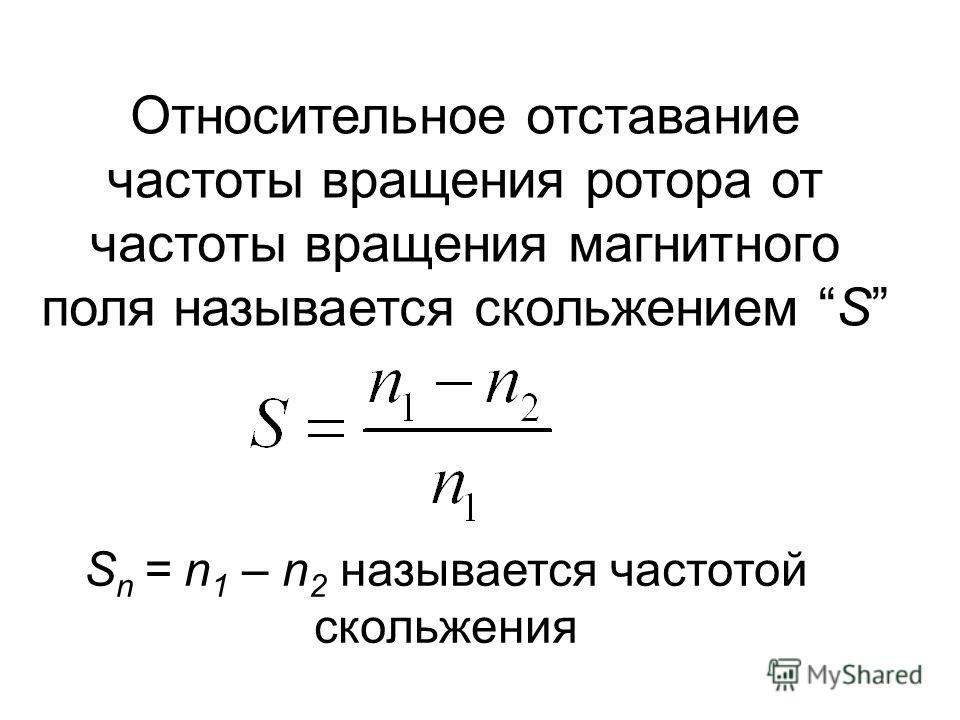
Величина определяющая разность скоростей вращения магнитных полей ротора и статора, называется скольжение. Так как ротор асинхронного двигателя всегда вращается медленнее, чем поле статора — оно обычно меньше единицы. Может измеряться в относительных единицах или процентах.
Высчитывается она по формуле:
где n1— это частота вращения магнитного поля, n2 – частота вращения магнитного поля ротора.
Скольжение, это важная характеристика, характеризующая нормальную работу асинхронного электродвигателя.
Величина скольжения в разных режимах работы
В режиме холостого хода скольжение близко к нулю и составляет 2-3%, ввиду того, что n1 почти равняется n2. Нулю оно не может быть равным, потому как в этом случае поле статора не пересекает поле ротора, простыми словами, двигатель не вращается и питающее на него напряжение не подается.
Даже в режиме идеального холостого хода, величина скольжения, выраженная в процентах, не будет равной нулю. S может принимать и отрицательные значения, в том случае, когда электродвигатель работает в генераторном режиме.
S может принимать и отрицательные значения, в том случае, когда электродвигатель работает в генераторном режиме.
В генераторном режиме (вращение ротора противоположно направлению поля статора) скольжение ЭД будет в значениях -∞<S<0.
Также существует режим электромагнитного торможения (противовключения ротора), в этом режиме скольжение принимает значение больше единицы, со знаком плюс.
Значение частоты тока в обмотках ротора равно частоте тока сети только в момент пуска. При номинальной нагрузке частота тока будет определяться по формуле:
f2=S*f1,
где f1 – частота тока, подаваемого на обмотки статора, а S — скольжение.
Частота тока ротора прямо пропорциональна его индуктивному сопротивлению. Таким образом, проявляется зависимость тока в роторе от скольжения АД. Вращающий момент электродвигателя зависит от величины S, так как определяется значениями величин магнитного потока, тока, углом сдвига между ЭДС и током ротора.
Поэтому, для детального исследования характеристик АД устанавливается зависимость, изображенная на рисунке выше. Таким образом, изменение момента (при различных значениях скольжения) в АД с фазным ротором может регулироваться путем ввода сопротивления в цепь обмоток ротора. В электродвигателях с короткозамкнутым ротором момент вращения регулируется или с помощью преобразователей частоты или использованием двигателей с переменными характеристиками.
При номинальной нагрузке электродвигателя значение скольжения будет в диапазоне 8%-2% (для двигателей малой и средней мощности), номинальное скольжение.
При увеличении нагрузки на валу (момента на валу) будет увеличиваться скольжение, простым языком, магнитное поле ротора будет все сильнее отставать (тормозить) от магнитного поля статора. Увеличение скольжения (S) приведет к пропорциональному увеличению тока ротора, следовательно, пропорционально увеличится момент. Но при этом увеличиваются активные потери в роторе (увеличивается сопротивление), которые уменьшают рост силы тока, поэтому момент увеличивается медленнее, чем скольжение.
При определенной величине скольжения момент достигнет максимального значения, потом начнет снижаться. Величину, при которой момент будет максимальным, называют критической (Sкр).
В графической форме механическую характеристику асинхронного электродвигателя можно выразить с помощью формулы Клосса:
где, Мк — это критический момент, который определяется критическим скольжением электродвигателя.
График строится исходя из характеристик, указанных в паспорте АД. При возникновении вопросов по приводу, в качестве движителя, использующего асинхронный электродвигатель, используется данный график.
Критический момент определяет величину допустимой мгновенной перегрузки электродвигателя. При развитии момента более критического (следовательно, более критического скольжения) происходит, так называемое, опрокидывание электродвигателя и двигатель останавливается. Опрокидывание — один из аварийных режимов.
Способы измерения
Существует несколько способов измерения скольжения асинхронного двигателя. Если частота вращения значительно отличается от синхронной, то ее можно измерить с помощью тахометра или тахогенератора, подключенного на валу ЭД.
Если частота вращения значительно отличается от синхронной, то ее можно измерить с помощью тахометра или тахогенератора, подключенного на валу ЭД.
Вариант измерения стробоскопическим методом с помощью неоновой лампы подходит при величине скольжения не более 5%. Для этого на валу двигателя либо наносят мелом специальную черту, либо устанавливают специальный стробоскопический диск. Освещают их неоновой лампой, и отсчитывают вращение за определенное время, потом, по специальным формулам производят вычисления. Также возможно использование полноценного стробоскопа, подобно тому что показано ниже.
Также, для измерения величины скольжения всех видов машин подходит способ индуктивной катушки. Катушку лучше всего использовать от реле или контактора постоянного тока, из-за количества витков (там 10-20 тысяч), количество витков должно быть не менее 3000. Катушку с подключенным к ней чувствительным милливольтметром, располагают у конца вала ротора. По отклонениям стрелки прибора (числу колебаний) за определенное время высчитывают по формуле величину скольжения. Помимо этого, у асинхронного двигателя с фазным ротором скольжение можно замерить с помощью магнитоэлектрического амперметра. Амперметр подключается к одной из фаз ротора и по числу отклонений стрелки амперметра производят вычисления (по формуле из способа с индуктивной катушкой).
По отклонениям стрелки прибора (числу колебаний) за определенное время высчитывают по формуле величину скольжения. Помимо этого, у асинхронного двигателя с фазным ротором скольжение можно замерить с помощью магнитоэлектрического амперметра. Амперметр подключается к одной из фаз ротора и по числу отклонений стрелки амперметра производят вычисления (по формуле из способа с индуктивной катушкой).
Вот мы и рассмотрели, что собой представляет скольжение асинхронного двигателя и как его определить. Если остались вопросы, задавайте их в комментариях под статьей!
Материалы по теме:
- Виды испытаний асинхронных двигателей
- Правила определения фазы, нуля и заземления в сети
- Как выбрать мультиметр для дома и работы
описание и определение, как измеряется
Электрооборудование
Автор: profelectro
Одним из главных параметров асинхронного электродвигателя является скольжение.
Это переменная величина. Меняться может, исходя из того, в каких режимах работает мотор, величины напряжения, валовой нагрузки.
 Это переменная величина. Меняться может, исходя из того, в каких режимах работает мотор, величины напряжения, валовой нагрузки.
Это переменная величина. Меняться может, исходя из того, в каких режимах работает мотор, величины напряжения, валовой нагрузки.В статье мы рассмотрим, что собой представляет это явление, как вычисляется, от каких условий зависит.
Что это такое
Принцип действия 3-х фазного электродвигателя (асинхронного) достаточно простой. К статорной обмотке подаётся питание. В результате образуется магнитный поток, смещённый на сто двадцать градусов в фазах. Общий поток, при этом, будет вращаться.
Обмотка представляет собой замкнутый контур, в котором возникает электродвижущая сила. Магнитный поток вращает ротор по направлению статорного потока. Крутящийся электромагнит стремится выровнять вращающие скорости статорного и роторного полей.
Значение, показывающее разницу быстроты вращения статорного и роторного полей и есть скольжение. Поскольку в асинхронном электродвигателе ротор всегда крутится медленней статора, значение, обычно, не превышает единицы.
 Измеряется в процентах либо единицах.
Измеряется в процентах либо единицах.Вычисляется по следующей формуле:
Здесь n1 – скорость статора, n2 – скорость ротора.
Скольжение – один из основных параметров, отображающий корректность функционирования асинхронного электродвигателя.
Параметры в различных рабочих режимах
Когда электродвигатель обесточен, вращение не происходит, потому что статорное поле не пересекается с роторным полем. В этом случае величина равна двум или трём процентам, т.е. колеблется около нуля.
Если даже параметр холостого хода идеален, процентное значение нулю равняться не будет. Величина может быть и отрицательной, если двигатель функционирует в режиме генератора. В таком режиме (ротор вращается против статора) значение S будет меньше нуля.
При электромагнитном торможении, величина Sпревышает единицу с положительным знаком. Величина токовой частоты в роторных обмотках равняется токовой частоте сети исключительно при пусковом моменте.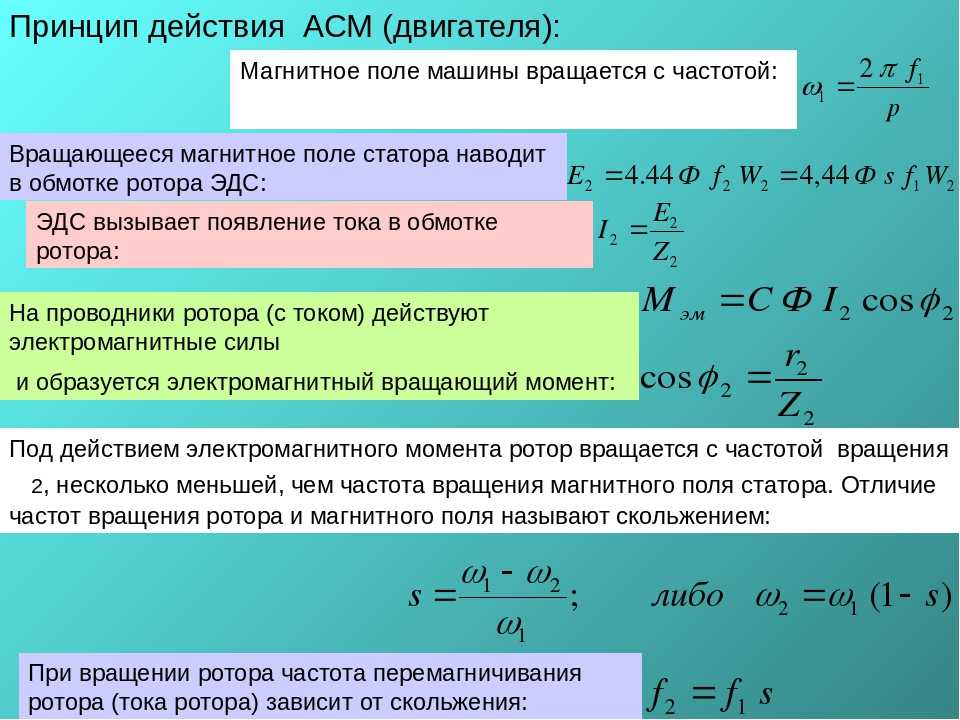
Роторная токовая частота пропорциональна сопротивлению индукции, поэтому роторный ток зависим от скольжения асинхронного двигателя.
Момент вращения АД находится в зависимости от значения S, поскольку определяется величинами токового и магнитного потоков, угловым смещением ЭДС и роторным током.
Для подробного изучения параметров электродвигателя определяется зависимость, показанная на графике вверху.
При разных показателях асинхронном двигателе момент вращения можно корректировать при помощи сопротивления, включённого в цепи роторных обмоток.
Если ротор замкнут «накоротко», вращающий момент изменяется либо частотными преобразователями, либо применением двигателей с изменяющимися параметрами.
При нагрузочном номинале двигателя показатель скольжения находится между двумя и восемью процентами. При добавлении нагрузки скольжение ускоряется, потому что роторное поле начнёт больше отставать от статорного поля.
Ускорение неминуемо приведёт к росту роторного тока и момента вращения.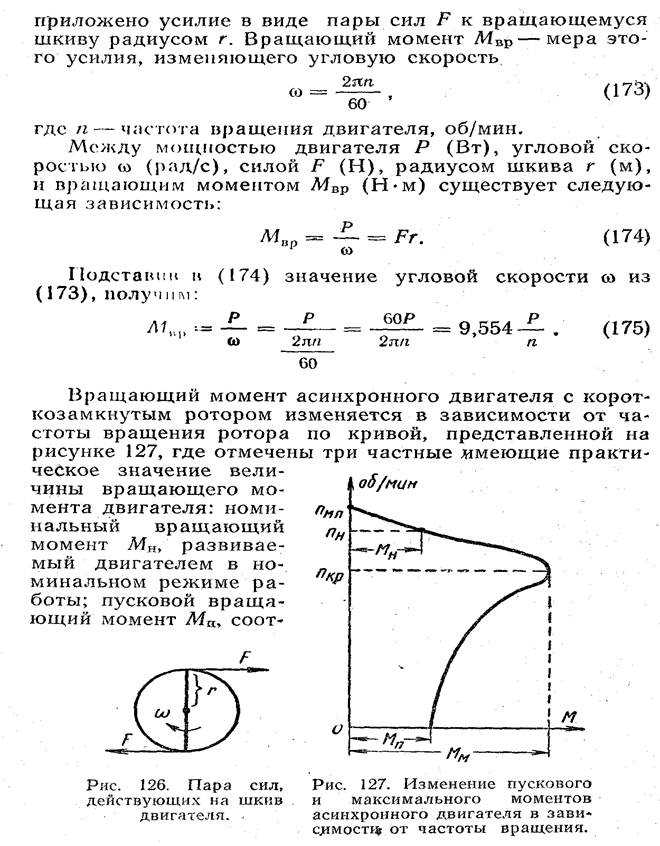 Параллельно с этим возрастает сопротивление, что связано с активными роторными потерями, токовые показатели снижаются, в связи с чем, вращение растёт гораздо медленней скольжения.
Параллельно с этим возрастает сопротивление, что связано с активными роторными потерями, токовые показатели снижаются, в связи с чем, вращение растёт гораздо медленней скольжения.
При определённой скорости скольжения момент вращения достигнет максимума и начнёт замедляться. Максимальное значение является критическим и обозначается Sкр.
В технической документации указываются параметры асинхронного двигателя. По ним строится график, отвечающий на вопросы, связанные с работой асинхронного электрического двигателя, применяемого в качестве привода.
Критический максимум задаёт параметр мгновенного допустимого перегруза двигателя. Когда этот параметр превышается, происходит остановка двигателя (опрокидывание).
 Это аварийный режим.
Это аварийный режим.Методы измерений
Есть несколько методов произвести замер скорости скольжения двигателя. Когда скорость существенно разнится с синхронным вращением, её определяют тахометром либо тахогенератором, подключённым к валу асинхронного двигателя.
Метод определения стробоскопом с лампой неонового свет применим при скольжении меньше пяти процентов. На двигательном валу мелом рисуют отметку или ставят стробоскоп.
Подают свет от лампы и считают количество оборотов за определённый промежуток времени и, используя формулы, определяют значение.
Ещё для замера скорости скольжения применяют катушку индуктивности. Оптимальным вариантом будет катушка контактора тока постоянной величины. К ней подключают милливольтметр и помещают в окончание роторного вала.
К ней подключают милливольтметр и помещают в окончание роторного вала.
По количеству колебаний стрелки за определённый промежуток времени с помощью формулы вычисляют скорость вращения.
Кроме того, у двигателя с ротором фазы величину скольжения определяют амперметром (магнитоэлектрическим). Прибор подсоединяют к одной из роторных фаз и по количеству стрелочных колебаний, опять-таки применяя формулу, получают результат.
Мы выяснили, что такое скольжение двигателя, способы его определения. Свои вопросы оставляйте в комментариях.
Что такое скольжение асинхронного двигателя
В результате взаимодействия магнитного поля с токами в роторе асинхронного двигателя создается вращающий электромагнитный момент, стремящийся уравнять скорость вращения магнитного поля статора и ротора.
Разность скоростей вращения магнитного поля статора и ротора асинхронного двигателя характеризуется величиной скольжения s = (n 1 — n 2 ) / n 1, где n 1 — синхронная скорость вращения поля, об/мин, n2 — скорость вращения ротора асинхронного двигателя, об/мин. При работе с номинальной нагрузкой скольжение обычно мало, так для электродвигателя, например, с n 1 = 1500 об/мин, n2 = 1 460 об/мин, скольжение равно: s = ((1500 — 1460) / 1500) х 100 = 2,7%
Асинхронный двигатель не может достичь синхронной скорости вращения даже три отсоединенном механизме, так как при ней проводники ротора не будут пересекаться магнитным полем, в них не будет наводиться ЭДС и не будет тока. Асинхронный момент при s = 0 будет равен нулю.
В начальный момент пуска в обмотках ротора протекает ток с частотой сети. По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного двигателя : f2 = s х f1, где f1 — частота тока, подводимого к статору.
Сопротивление ротора зависит от частоты тока в нем, причем чем больше частота, тем больше его индуктивное сопротивление. С увеличением индуктивного сопротивления ротора увеличивается сдвиг фаз между напряжением и током в обмотках статора.
С увеличением индуктивного сопротивления ротора увеличивается сдвиг фаз между напряжением и током в обмотках статора.
При пуске асинхронных двигателей коэффициент мощности поэтому значительно ниже, чем при нормальной работе. Величина тока определяется эквивалентным значением сопротивления электродвигателя и приложенным напряжением.
Величина эквивалентного сопротивления асинхронного двигателя с изменением скольжения изменяется по сложному закону. При уменьшении скольжения в пределах 1 — 0,15 сопротивление увеличивается, как правило, не более чем в 1,5 раза, в пределах от 0,15 до s н ом в 5-7 раз по отношению к начальному значению при пуске.
Ток по величине изменяется обратно пропорционально изменению эквивалентного сопротивления Таким образом, при пуске до скольжения порядка 0,15 ток опадает незначительно, а в дальнейшем быстро уменьшается.
Момент вращения может быть также определен по электромагнитной мощности на валу как отношение этой мощности к угловой скорости ротора. Величина момента пропорциональна квадрату напряжения и обратно пропорциональная квадрату частоты.
Величина момента пропорциональна квадрату напряжения и обратно пропорциональная квадрату частоты.
Характерными значениями момента в зависимости от скольжения (или скорости) являются начальное значение момента (когда электродвигатель еще неподвижен), максимальное значение момента (и соответствующее ему сколь жение, называемое критическим) и минимальное значение момента в пределе скоростей от неподвижного состояния до номинальной .
З начения момента для номинального напряжения приводятся в каталогах для электрических машин. Знание минимального момента необходимо при расчете допустимости пуска или самозапуска механизма с полной нагрузкой механизма. Поэтому его значение для конкретных расчетов должно быть либо определено, либо получено от завода-поставщика.
Величина максимального значения момента определяется индуктивным сопротивлением рассеяния статора и ротора и не зависит от величины сопротивления ротора.
Критическое скольжение определяется отношением сопротивления ротора к эквивалентному сопротивлению (обусловлено активным сопротивлением статора и индуктивным сопротивлением рассеяния статора и ротора).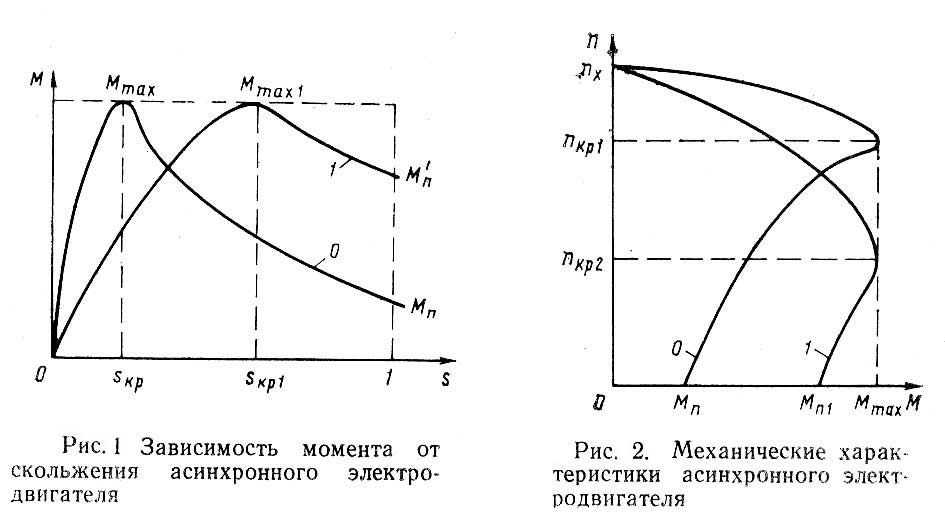
Увеличение только активного сопротивления ротора сопровождается увеличением критического скольжения и перемещением максимума момента в область более высоких скольжений (меньшей скорости вращения). Таким путем может быть достигнуто изменение характеристик моментов.
Изменение скольжения возможно увеличением сопротивления цени ротора или потока. Первый вариант осуществим только для асинхронных двигателей с фазным ротором (от S = 1 до S = Sном ) , но не экономичен. Второй вариант осуществим при изменении питающего напряжения, но только в сторону уменьшения. Диапазон регулирования мал, так как S возрастает, но одновременно уменьшается перегрузочная способность асинхронного двигателя. По экономичности оба варианта, примерно, равноценны.
В асинхронных двига т елях с фазным ротором изменение момента при различных скольжениях осуществляется с помощью сопротивления, вводимого в цепь обмотки ротора. В асинхронных двигателях с короткозамкнутым ротором изменение момента может быть достигнуто за счет применения двигателей с переменными параметрами или с помощью частотных преобразователей .
В результате взаимодействия магнитного поля с токами в роторе асинхронного двигателя создается вращающий электромагнитный момент, стремящийся уравнять скорость вращения магнитного поля статора и ротора.
Разность скоростей вращения магнитного поля статора и ротора асинхронного двигателя характеризуется величиной скольжения s = (n 1 — n 2 ) / n 1, где n 1 — синхронная скорость вращения поля, об/мин, n2 — скорость вращения ротора асинхронного двигателя, об/мин. При работе с номинальной нагрузкой скольжение обычно мало, так для электродвигателя, например, с n 1 = 1500 об/мин, n2 = 1 460 об/мин, скольжение равно: s = ((1500 — 1460) / 1500) х 100 = 2,7%
Асинхронный двигатель не может достичь синхронной скорости вращения даже три отсоединенном механизме, так как при ней проводники ротора не будут пересекаться магнитным полем, в них не будет наводиться ЭДС и не будет тока. Асинхронный момент при s = 0 будет равен нулю.
В начальный момент пуска в обмотках ротора протекает ток с частотой сети.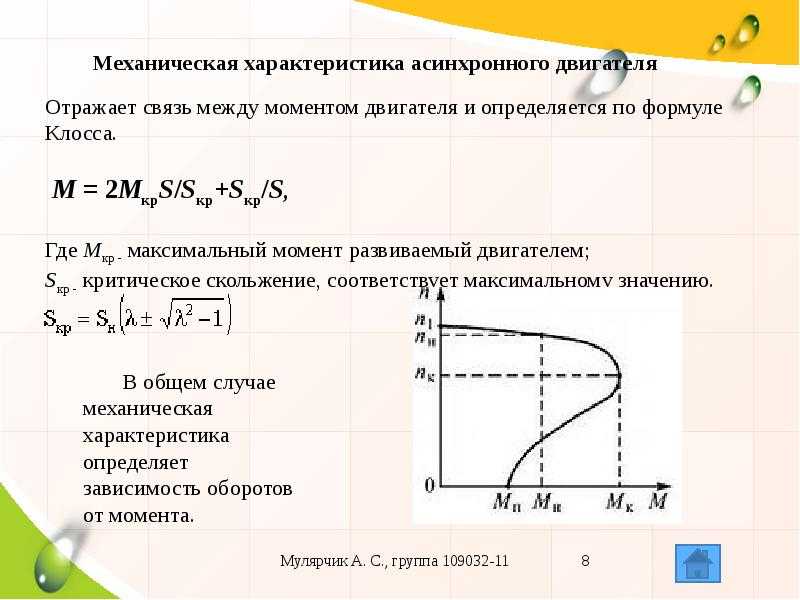 По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного двигателя : f2 = s х f1, где f1 — частота тока, подводимого к статору.
По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного двигателя : f2 = s х f1, где f1 — частота тока, подводимого к статору.
Сопротивление ротора зависит от частоты тока в нем, причем чем больше частота, тем больше его индуктивное сопротивление. С увеличением индуктивного сопротивления ротора увеличивается сдвиг фаз между напряжением и током в обмотках статора.
При пуске асинхронных двигателей коэффициент мощности поэтому значительно ниже, чем при нормальной работе. Величина тока определяется эквивалентным значением сопротивления электродвигателя и приложенным напряжением.
Величина эквивалентного сопротивления асинхронного двигателя с изменением скольжения изменяется по сложному закону. При уменьшении скольжения в пределах 1 — 0,15 сопротивление увеличивается, как правило, не более чем в 1,5 раза, в пределах от 0,15 до s н ом в 5-7 раз по отношению к начальному значению при пуске.
Ток по величине изменяется обратно пропорционально изменению эквивалентного сопротивления Таким образом, при пуске до скольжения порядка 0,15 ток опадает незначительно, а в дальнейшем быстро уменьшается.
Момент вращения может быть также определен по электромагнитной мощности на валу как отношение этой мощности к угловой скорости ротора. Величина момента пропорциональна квадрату напряжения и обратно пропорциональная квадрату частоты.
Характерными значениями момента в зависимости от скольжения (или скорости) являются начальное значение момента (когда электродвигатель еще неподвижен), максимальное значение момента (и соответствующее ему сколь жение, называемое критическим) и минимальное значение момента в пределе скоростей от неподвижного состояния до номинальной .
З начения момента для номинального напряжения приводятся в каталогах для электрических машин. Знание минимального момента необходимо при расчете допустимости пуска или самозапуска механизма с полной нагрузкой механизма. Поэтому его значение для конкретных расчетов должно быть либо определено, либо получено от завода-поставщика.
Величина максимального значения момента определяется индуктивным сопротивлением рассеяния статора и ротора и не зависит от величины сопротивления ротора.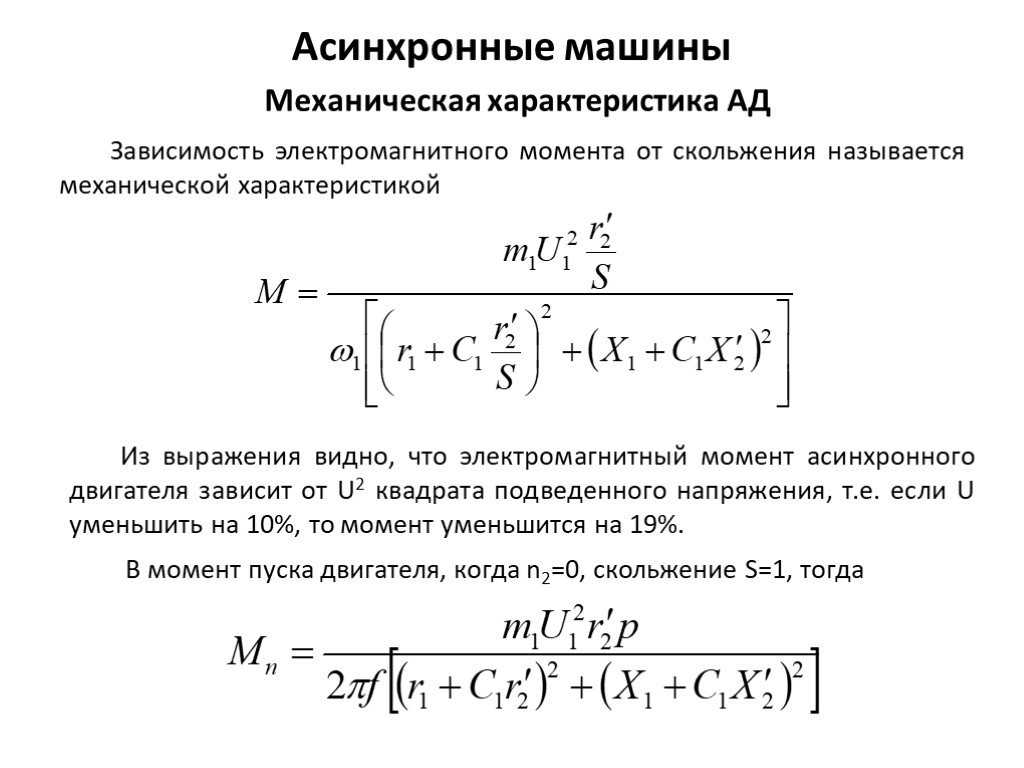
Критическое скольжение определяется отношением сопротивления ротора к эквивалентному сопротивлению (обусловлено активным сопротивлением статора и индуктивным сопротивлением рассеяния статора и ротора).
Увеличение только активного сопротивления ротора сопровождается увеличением критического скольжения и перемещением максимума момента в область более высоких скольжений (меньшей скорости вращения). Таким путем может быть достигнуто изменение характеристик моментов.
Изменение скольжения возможно увеличением сопротивления цени ротора или потока. Первый вариант осуществим только для асинхронных двигателей с фазным ротором (от S = 1 до S = Sном ) , но не экономичен. Второй вариант осуществим при изменении питающего напряжения, но только в сторону уменьшения. Диапазон регулирования мал, так как S возрастает, но одновременно уменьшается перегрузочная способность асинхронного двигателя. По экономичности оба варианта, примерно, равноценны.
В асинхронных двига т елях с фазным ротором изменение момента при различных скольжениях осуществляется с помощью сопротивления, вводимого в цепь обмотки ротора.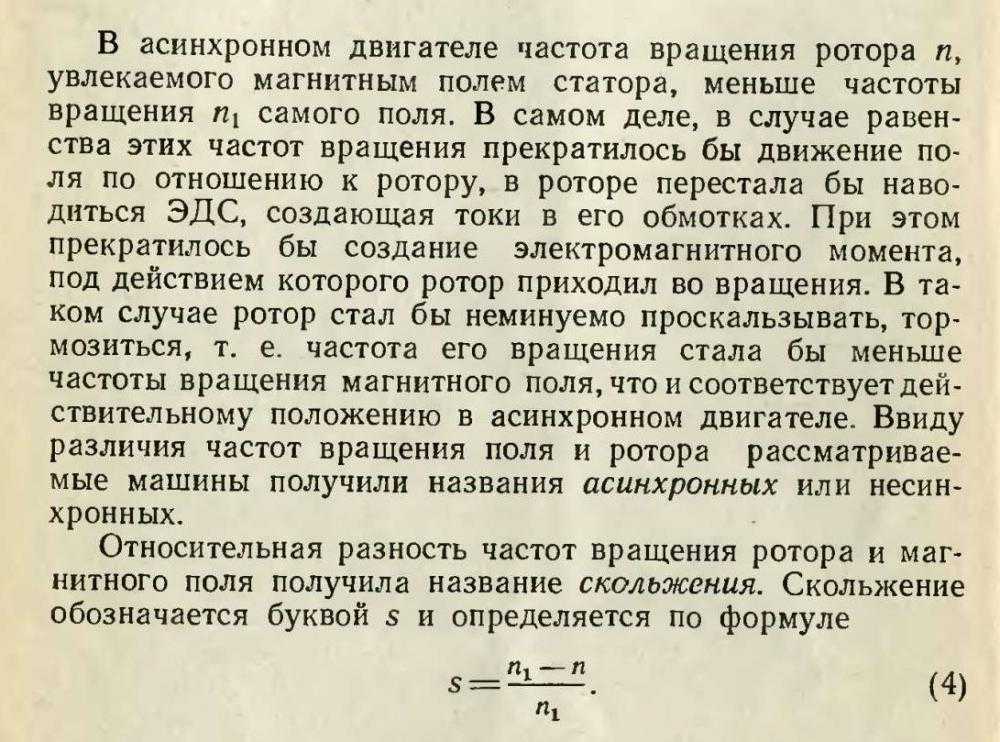 В асинхронных двигателях с короткозамкнутым ротором изменение момента может быть достигнуто за счет применения двигателей с переменными параметрами или с помощью частотных преобразователей .
В асинхронных двигателях с короткозамкнутым ротором изменение момента может быть достигнуто за счет применения двигателей с переменными параметрами или с помощью частотных преобразователей .
Что это такое
Принцип работы трехфазного асинхронного двигателя довольно прост. На обмотку статора подается питающее напряжение, которое создает магнитный поток, в каждой фазе он будет смещен на 120 градусов. При этом суммирующий магнитный поток будет вращающимся.
Обмотка ротора является замкнутым контуром, в ней наводится ЭДС и возникающий магнитный поток придает вращение ротору, в направлении движения магнитного потока статора. Вращающий электромагнитный момент пытается уравнять скорости вращения магнитных полей статора и ротора.
Величина определяющая разность скоростей вращения магнитных полей ротора и статора, называется скольжение. Так как ротор асинхронного двигателя всегда вращается медленнее, чем поле статора — оно обычно меньше единицы. Может измеряться в относительных единицах или процентах.
Высчитывается она по формуле:
где n1— это частота вращения магнитного поля, n2 – частота вращения магнитного поля ротора.
Скольжение, это важная характеристика, характеризующая нормальную работу асинхронного электродвигателя.
Величина скольжения в разных режимах работы
В режиме холостого хода скольжение близко к нулю и составляет 2-3%, ввиду того, что n1 почти равняется n2. Нулю оно не может быть равным, потому как в этом случае поле статора не пересекает поле ротора, простыми словами, двигатель не вращается и питающее на него напряжение не подается.
Даже в режиме идеального холостого хода, величина скольжения, выраженная в процентах, не будет равной нулю. S может принимать и отрицательные значения, в том случае, когда электродвигатель работает в генераторном режиме.
В генераторном режиме (вращение ротора противоположно направлению поля статора) скольжение ЭД будет в значениях -∞
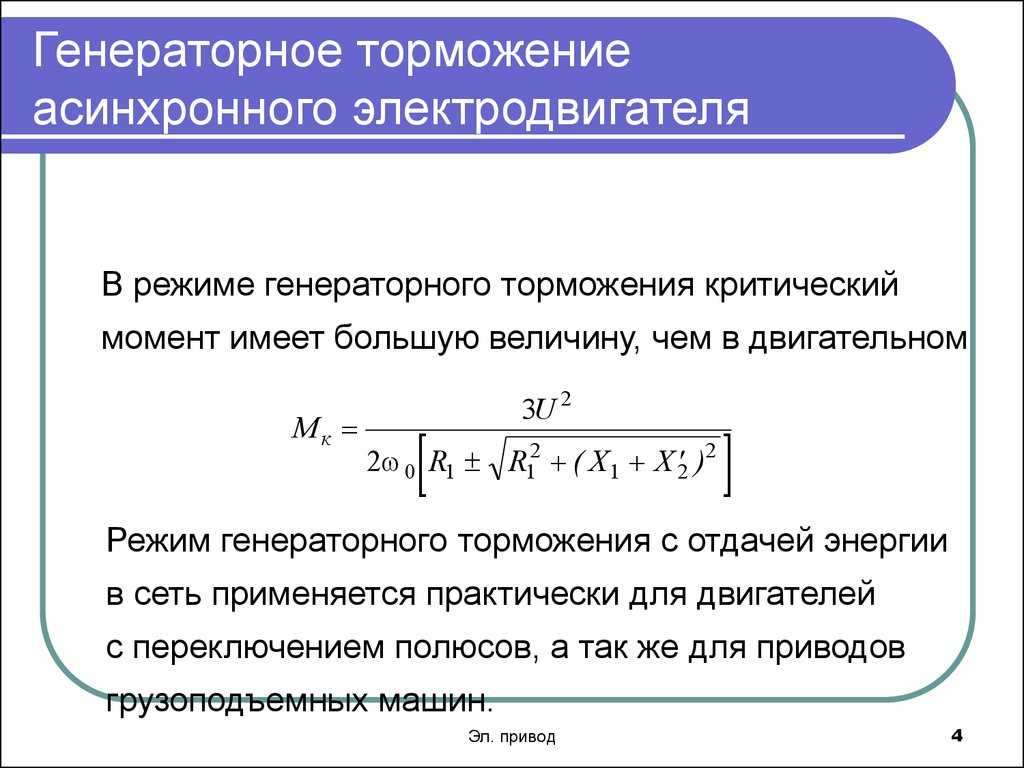
Поэтому, для детального исследования характеристик АД устанавливается зависимость, изображенная на рисунке выше.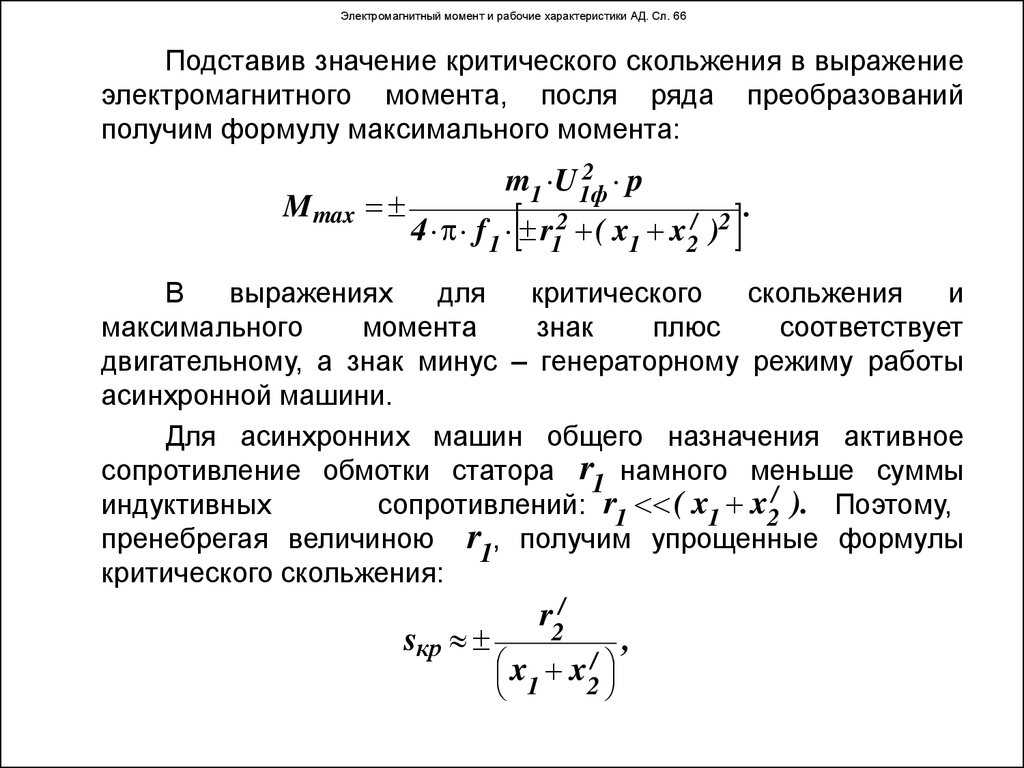 Таким образом, изменение момента (при различных значениях скольжения) в АД с фазным ротором может регулироваться путем ввода сопротивления в цепь обмоток ротора. В электродвигателях с короткозамкнутым ротором момент вращения регулируется или с помощью преобразователей частоты или использованием двигателей с переменными характеристиками.
Таким образом, изменение момента (при различных значениях скольжения) в АД с фазным ротором может регулироваться путем ввода сопротивления в цепь обмоток ротора. В электродвигателях с короткозамкнутым ротором момент вращения регулируется или с помощью преобразователей частоты или использованием двигателей с переменными характеристиками.
При номинальной нагрузке электродвигателя значение скольжения будет в диапазоне 8%-2% (для двигателей малой и средней мощности), номинальное скольжение.
При увеличении нагрузки на валу (момента на валу) будет увеличиваться скольжение, простым языком, магнитное поле ротора будет все сильнее отставать (тормозить) от магнитного поля статора. Увеличение скольжения (S) приведет к пропорциональному увеличению тока ротора, следовательно, пропорционально увеличится момент. Но при этом увеличиваются активные потери в роторе (увеличивается сопротивление), которые уменьшают рост силы тока, поэтому момент увеличивается медленнее, чем скольжение.
При определенной величине скольжения момент достигнет максимального значения, потом начнет снижаться.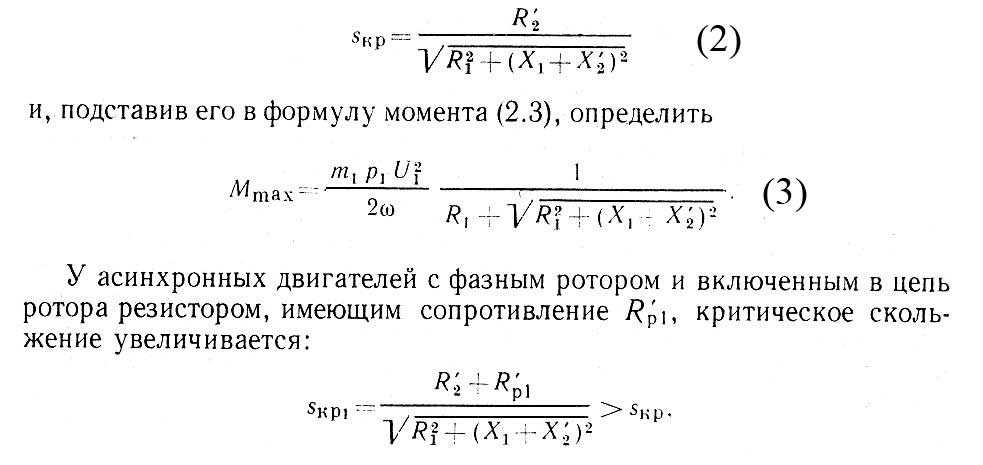 Величину, при которой момент будет максимальным, называют критической (Sкр).
Величину, при которой момент будет максимальным, называют критической (Sкр).
В графической форме механическую характеристику асинхронного электродвигателя можно выразить с помощью формулы Клосса:
где, Мк — это критический момент, который определяется критическим скольжением электродвигателя.
График строится исходя из характеристик, указанных в паспорте АД. При возникновении вопросов по приводу, в качестве движителя, использующего асинхронный электродвигатель, используется данный график.
Критический момент определяет величину допустимой мгновенной перегрузки электродвигателя. При развитии момента более критического (следовательно, более критического скольжения) происходит, так называемое, опрокидывание электродвигателя и двигатель останавливается. Опрокидывание — один из аварийных режимов.
Способы измерения
Существует несколько способов измерения скольжения асинхронного двигателя. Если частота вращения значительно отличается от синхронной, то ее можно измерить с помощью тахометра или тахогенератора, подключенного на валу ЭД.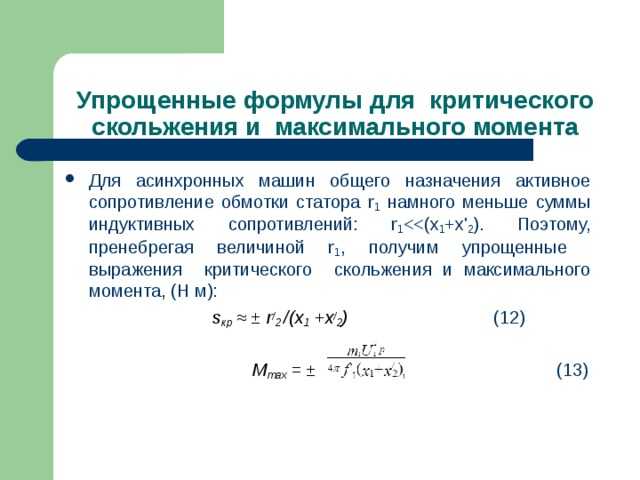
Вариант измерения стробоскопическим методом с помощью неоновой лампы подходит при величине скольжения не более 5%. Для этого на валу двигателя либо наносят мелом специальную черту, либо устанавливают специальный стробоскопический диск. Освещают их неоновой лампой, и отсчитывают вращение за определенное время, потом, по специальным формулам производят вычисления. Также возможно использование полноценного стробоскопа, подобно тому что показано ниже.
Также, для измерения величины скольжения всех видов машин подходит способ индуктивной катушки. Катушку лучше всего использовать от реле или контактора постоянного тока, из-за количества витков (там 10-20 тысяч), количество витков должно быть не менее 3000. Катушку с подключенным к ней чувствительным милливольтметром, располагают у конца вала ротора. По отклонениям стрелки прибора (числу колебаний) за определенное время высчитывают по формуле величину скольжения. Помимо этого, у асинхронного двигателя с фазным ротором скольжение можно замерить с помощью магнитоэлектрического амперметра. Амперметр подключается к одной из фаз ротора и по числу отклонений стрелки амперметра производят вычисления (по формуле из способа с индуктивной катушкой).
Амперметр подключается к одной из фаз ротора и по числу отклонений стрелки амперметра производят вычисления (по формуле из способа с индуктивной катушкой).
Вот мы и рассмотрели, что собой представляет скольжение асинхронного двигателя и как его определить. Если остались вопросы, задавайте их в комментариях под статьей!
Какое значение имеет скольжение в асинхронном двигателе?
Асинхронный двигатель не может работать, если нет скольжения. Что такое скольжение асинхронного двигателя? давайте сначала поймем скольжение асинхронного двигателя.
Что такое скольжение?
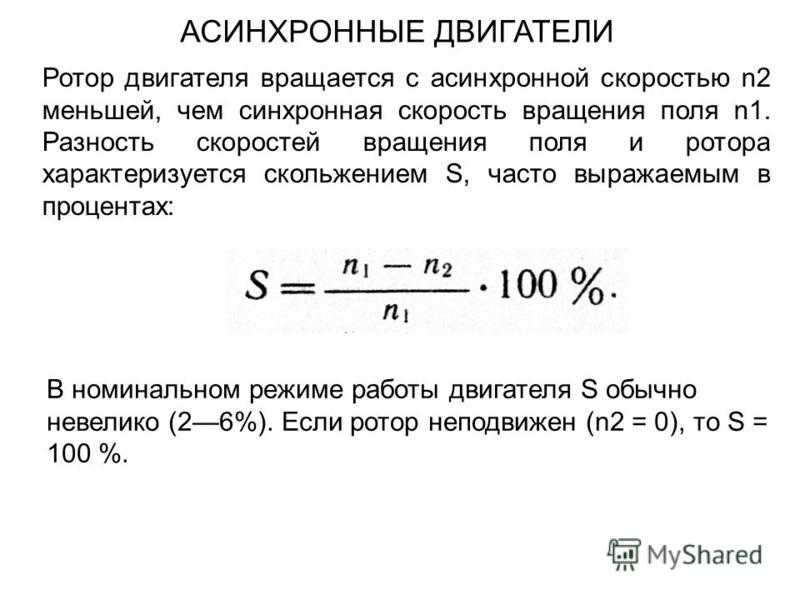
Когда асинхронный двигатель питается от трехфазной сети, создается вращающееся магнитное поле. Скорость вращающегося магнитного поля известна как синхронная скорость (Ns) двигателя. Магнитное поле, создаваемое в двигателе, связывается с проводниками ротора, которые замыкаются концевыми кольцами.
Поток, связанный с проводниками ротора, индуцирует напряжение в роторе, и поскольку проводники ротора замыкаются накоротко, ток начинает течь через проводники ротора. Благодаря взаимодействию между магнитным полем и током ротора создается крутящий момент, и ротор начинает вращаться. Пусть скорость вращения ротора равна N.
Благодаря взаимодействию между магнитным полем и током ротора создается крутящий момент, и ротор начинает вращаться. Пусть скорость вращения ротора равна N.
В асинхронном двигателе скорость вращения ротора всегда отстает от синхронной скорости вращающегося магнитного поля. Асинхронный двигатель называется асинхронным двигателем, потому что фактическая скорость двигателя всегда меньше синхронной скорости двигателя.
Разница между скоростью вращающегося магнитного поля или синхронной скоростью и фактической скоростью ротора или двигателя называется скольжением двигателя. Скольжение можно математически выразить как;
с = Ns – N
Скольжение в об/мин.
Проскальзывание в процентах,
Например:
4 полюса, асинхронный двигатель 50 Гц, 1480 об/мин при полной нагрузке.
Синхронная скорость двигателя
Ns = 120f/P
= 120 x 50/4
Ns = 1500 об/мин
с = Ns -N
= 1500–1480
с = 20 об/мин -1480) /1500] x 100
= [20/1500] x 100
% Slip = 1,33 %
Подробнее: Индукционный мотор.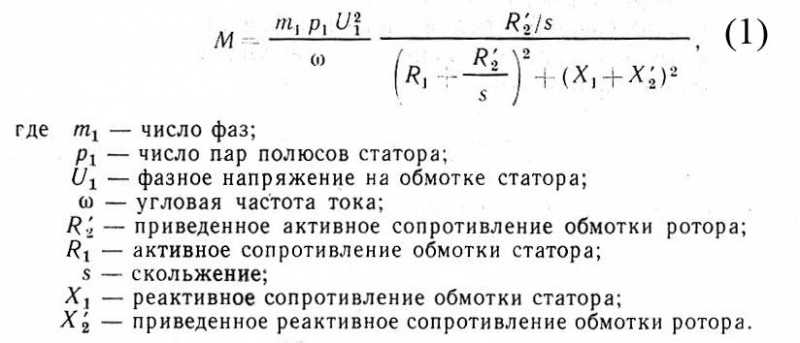 работа асинхронного двигателя?
работа асинхронного двигателя?
Крутящий момент возникает при протекании тока в проводнике ротора. Если скольжение равно нулю, в проводнике ротора не будет индуцироваться ЭДС, и, следовательно, в цепи ротора не будет протекать ток.
Крутящий момент создается за счет взаимодействия основного потока и тока ротора. Если ток ротора равен нулю, двигатель не будет создавать крутящий момент. При отсутствии скольжения работа двигателя невозможна. Крутящий момент, создаваемый асинхронным двигателем, пропорционален скольжению. Уравнение крутящего момента асинхронного двигателя приведено ниже.
Из приведенного выше уравнения крутящего момента асинхронного двигателя видно, что если скольжение равно нулю, крутящий момент будет равен нулю. Когда нагрузка на двигатель увеличивается, скольжение увеличивается, а скорость двигателя немного снижается, поэтому двигатель обеспечивает более высокий крутящий момент для управления нагрузкой.
Скольжение играет очень важную роль в работе асинхронного двигателя. На холостом ходу скольжение асинхронного двигателя меньше и увеличивается с увеличением нагрузки на двигатель. Скольжение двигателя саморегулируется в соответствии с требованиями крутящего момента со стороны нагрузки.
На холостом ходу скольжение асинхронного двигателя меньше и увеличивается с увеличением нагрузки на двигатель. Скольжение двигателя саморегулируется в соответствии с требованиями крутящего момента со стороны нагрузки.
Скольжение определяет другие параметры асинхронного двигателя.
ЭДС, индуцированная ротором
ЭДС, индуцированная в роторе, прямо пропорциональна скольжению. В состоянии покоя скольжение равно единице, а индуцированное ротором напряжение максимально.
E 2 (R) ∝ (NS-N)
∝ S (S = NS-N)
E 2 (R) = S E 2
Где,
E 2
sE 2 — ЭДС ротора/ Фаза в состоянии покоя
В состоянии покоя
s= (Ns – N)/ Ns = (Ns -0)/Ns = 1
, значит, E 2(r) = s E 2
E 2 (r) = 1 X E 2 = E 2
E 2 (R) = E 2
Эмф индуцируется в ротоне на стойке.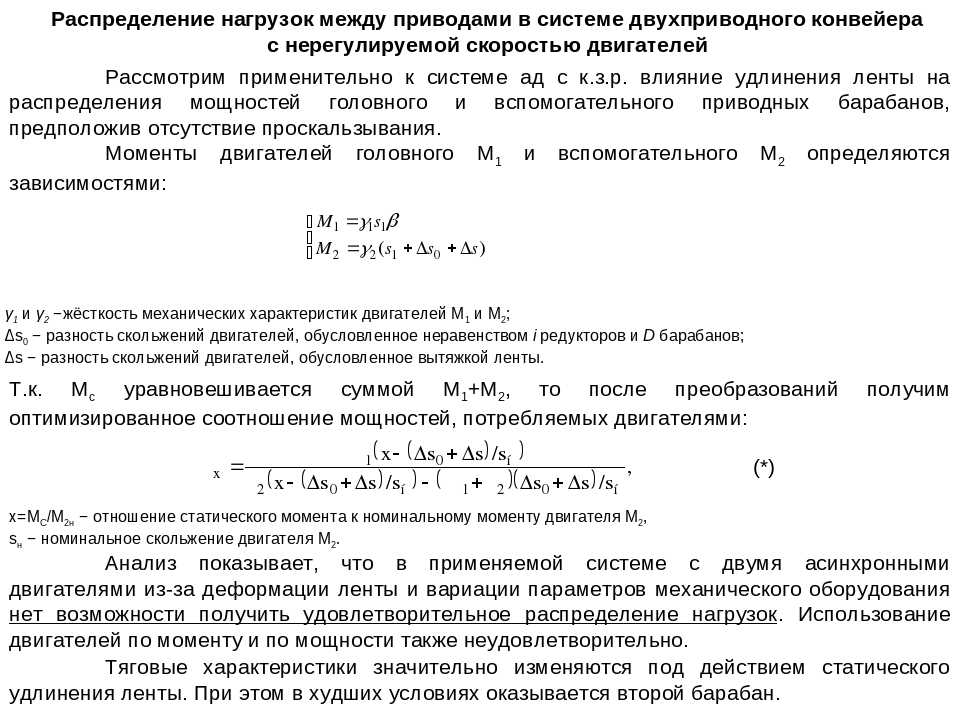 равно максимальному напряжению ротора (OCV) или равно напряжению холостого хода ротора.
равно максимальному напряжению ротора (OCV) или равно напряжению холостого хода ротора.
Частота ЭДС ротора
В условиях покоя частота ЭДС ротора равна частоте статора. Частота ЭДС ротора уменьшается, когда двигатель начинает разгоняться, и частота минимальна, когда двигатель достигает номинальной скорости. Математическая связь между частотой ЭДС, индуцированной ротором, и частотой статора приведена ниже.
F R = SF S
Слип. 1
Следовательно, в состоянии покоя
f r =f s
Сопротивление ротора
Сопротивление ротора не зависит от скольжения и, следовательно, сопротивление ротора остается постоянным независимо от скорости двигателя.
Ч 2 = Постоянная
Реактивное сопротивление ротора
Реактивное сопротивление ротора уменьшается с увеличением скорости двигателя.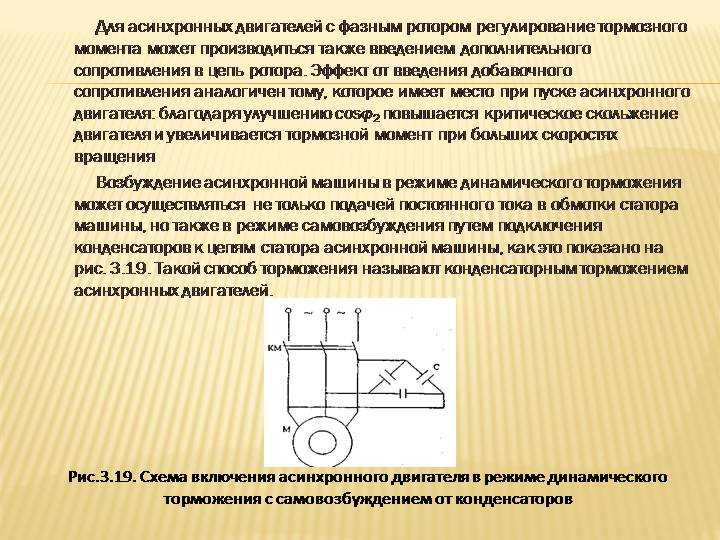 Реактивное сопротивление ротора наименьшее, когда двигатель работает на номинальной скорости. В состоянии покоя скольжение равно единице, а частота ЭДС ротора равна частоте питания.
Реактивное сопротивление ротора наименьшее, когда двигатель работает на номинальной скорости. В состоянии покоя скольжение равно единице, а частота ЭДС ротора равна частоте питания.
Пусть реактивное сопротивление ротора равно X 2 .
X 2 = ω L 2
, где,
ω = 2π F R
L 2 = Индуктивность ротора
Следовательно,
x 2 = 2 FR L 2
X 2
= 2
x 2 = 2
X 2 = 2
x 2 = 2
x 2 . L 2 [ As fr =fs, в состоянии покоя]
Индуцированная ротором частота в рабочем состоянии зависит от скольжения двигателя.
В рабочем состоянии,
f r =sf s
Реактивное сопротивление ротора в рабочем состоянии будет равно;
x 2R = 2πs F R L 2
= S ( 2π F R L 2 )
x 2.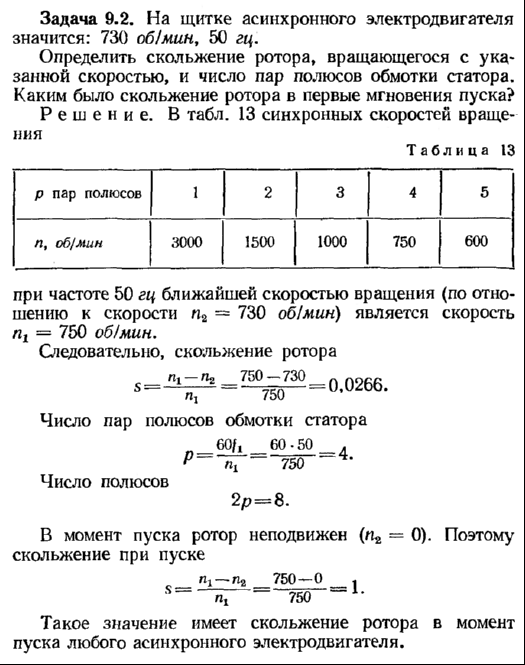 2 = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = ).
2 = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = S = ).
Полное сопротивление ротора
Полное сопротивление/фаза ротора в состоянии покоя приведены ниже.
Импеданс/фаза ротора в рабочем состоянии приведены ниже.
Где,
Коэффициент мощности ротора
Импеданс, сопротивление и треугольник реактивного сопротивления цепи ротора приведены ниже.
Коэффициент мощности ротора в состоянии покоя указан ниже.
В рабочем режиме коэффициент мощности цепи ротора составляет ;
Наглядные примеры скольжения асинхронного двигателя:
Если ЭДС индукции в 4-полюсном статоре имеет частоту 50 Гц, а в роторе 1,5 Гц, то на какой скорости работает двигатель и каково скольжение асинхронного двигателя ?
fr = 50 Гц
P = 4
N с = 120F/P
= 120 x 50/4
N S = 1500 об/мин
F R = Слист x Статор частота
1,5 = S x 50
S = 1,5/50
S = 0,03
двигателя
N = Ns(1 – s )
= 1500(1 – 0,03 )
= 1500 x 0,97
N = 1455 об/мин ротор , соединенный звездой. Скорость двигателя при полной нагрузке составляет 1460 об/мин. Сопротивление ротора и реактивное сопротивление покоя на фазу составляют 0,1 Ом и 1,5 Ом соответственно. Напряжение холостого хода на холостом ходу между контактными кольцами составляет 9 В.0 вольт. Определите (i) процент скольжения (ii) ЭДС индукции в роторе на фазу (iii) реактивное сопротивление ротора на фазу при полной нагрузке (iv) ток ротора и коэффициент мощности при полной нагрузке.
Скорость двигателя при полной нагрузке составляет 1460 об/мин. Сопротивление ротора и реактивное сопротивление покоя на фазу составляют 0,1 Ом и 1,5 Ом соответственно. Напряжение холостого хода на холостом ходу между контактными кольцами составляет 9 В.0 вольт. Определите (i) процент скольжения (ii) ЭДС индукции в роторе на фазу (iii) реактивное сопротивление ротора на фазу при полной нагрузке (iv) ток ротора и коэффициент мощности при полной нагрузке.
(i) Ns = 120f/p
= 120 x 50/4
= 1500 об/мин;
скольжение = (Ns – N) / Ns
= (1500 – 1460)/ 1500
= 0,0266 Процент
скольжение = 2,66 %
ЭДС ротора при полной нагрузке E r = SE 2
= 0,0266 x 51,96
= 1,382 Вольт
(III) Реактивность ротора на стойке = 1,5 Ом / Фаза
Реактивность ротора на фазу при полной нагрузке = SX 2
= 0,0399999999999999 гг.
(iv) Импеданс ротора на фазу при полной нагрузке
Z 2 = √ (R 2 2 + SX 2 2 )
= 0,1077 ОД
Ротор. Текущий на фазу = 1,382/0.1077777777 = 0,1077 ω
Текущий на фазу = 1,382/0.1077777777 = 0,1077 ω
. 12,83 А
Коэффициент мощности при полной нагрузке = R2/Z2
= 0,1/0,1077
= 0,929
Трехфазный асинхронный двигатель с контактными кольцами имеет ротор, соединенный звездой. ЭДС 60 вольт при разомкнутой цепи возникает между контактными кольцами в состоянии покоя при номинальном напряжении статора. Сопротивление и реактивное сопротивление покоя ротора на фазу составляют 0,5 Ом и 5 Ом соответственно. Определите ток ротора по фазе (i), когда ротор находится в состоянии покоя и подключен к соединенному звездой реостату с сопротивлением 5 Ом и реактивным сопротивлением 0,5 Ом на фазу. (ii) при работе со скольжением 4 % при короткозамкнутом реостате.
Ток через ротор в состоянии покоя = ток при пуске Поскольку внешние сопротивления включаются последовательно с ротором, имеющим сопротивление и реактивное сопротивление на фазу R 2 = 5,5 Ом; X 2 = 5,5 Ом соответственно.
(I) I 2 = E 2 / √ (R 2 2 +x 2 2 )
= (60 / √ 3) / √ (5,5) 2 6 = (60 / √ 3) / √ (5,5) 2 2 2 2966 2 2 2 2 9017 = (60 / √ 3) / √ (5,5) ). + (5,5) 2 )
I 2 = 4,454 ампер
(ii) При работе со скольжением 4%
I 2 = SE 2 / √ (R 2 2 + (SX 2 2 ))
= (0,04 x 60 / √ 3) / √ (0,5) 2 2 2 2 2 2 2 2 2 2 . + (0,04 x 5) 2 ))
= 2,573 А
Трехфазный 12-полюсный явнополюсный генератор переменного тока соединен с дизельным двигателем, работающим со скоростью 500 об/мин. Он питает асинхронный двигатель, который имеет скорость полной нагрузки 1440 об/мин. Найдите процент скольжения и число полюсов асинхронного двигателя.
Частота питания асинхронного двигателя
f = pn/120
= 12 x 500 / 120
= 50 Гц
Скорость асинхронного двигателя = 1440 об/мин,
Число полюсов асинхронного двигателя = p = 120 f / n
= 120 x 50/1440
= 4,16
Число полюсов должно быть четным, выбирая ближайшее четное число как число полюсов p = 4
Синхронная скорость асинхронного двигателя
Ns = 120f/p
= 120 x 50/4 = 1500 об/мин
скольжение = (Ns – N) / Ns
= (1500 – 1440)/ 1500
= 0,04 Процентное скольжение = 4 %
Связанный пост
- Интервью с асинхронным двигателем Вопросы и ответы Часть 2
- Почему асинхронный двигатель потребляет большой пусковой ток?
- Почему трехфазным асинхронным двигателям не нужна нейтраль?
- Трехфазный асинхронный двигатель с самозапуском
- Почему асинхронный двигатель является двигателем почти с постоянной скоростью?
Похожие посты:
Подпишитесь на нас и поставьте лайк:
Проскальзывание асинхронных двигателей переменного тока и способы его минимизации
Маури Пелтола, ABB Oy, приводы
Асинхронный двигатель переменного тока часто называют рабочей лошадкой отрасли. Это потому, что он предлагает пользователям простую, прочную конструкцию, простоту обслуживания и экономичную цену. Эти факторы способствовали стандартизации и развитию производственной инфраструктуры, что привело к созданию обширной установленной базы двигателей; более 90 процентов всех двигателей, используемых в промышленности во всем мире, являются асинхронными двигателями переменного тока.
Это потому, что он предлагает пользователям простую, прочную конструкцию, простоту обслуживания и экономичную цену. Эти факторы способствовали стандартизации и развитию производственной инфраструктуры, что привело к созданию обширной установленной базы двигателей; более 90 процентов всех двигателей, используемых в промышленности во всем мире, являются асинхронными двигателями переменного тока.
Несмотря на эту популярность, асинхронный двигатель переменного тока имеет два основных ограничения:
- стандартный двигатель не является настоящей машиной с постоянной скоростью; и
- по своей природе не может обеспечивать работу с переменной скоростью.
Оба эти ограничения требуют рассмотрения, поскольку требования к качеству и точности двигателей/приводов продолжают расти.
В этой статье объясняется причина первого ограничения — скольжения — и способы его минимизации. Кроме того, подробно описаны наилучшие методы управления скоростью двигателя с помощью имеющейся в настоящее время силовой электроники, включая технологию, позволяющую свести к минимуму негативное влияние проскальзывания.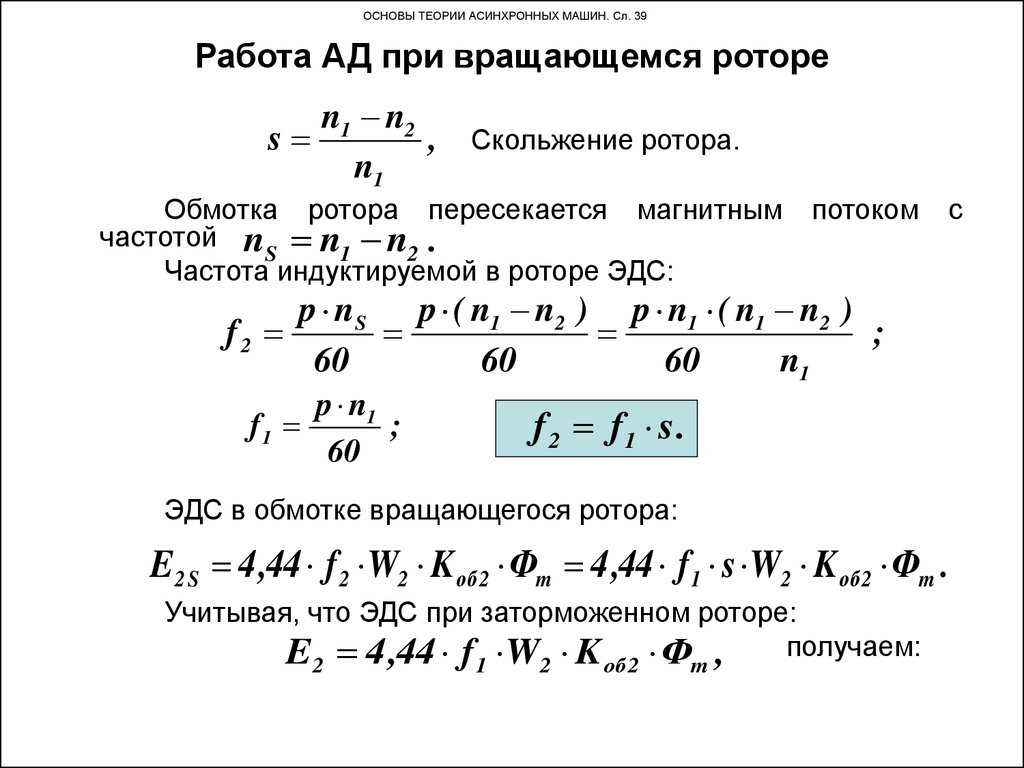
Проскальзывание двигателя необходимо для создания крутящего момента
Асинхронный двигатель переменного тока состоит из двух основных узлов – статора и ротора. Конструкция статора состоит из стальных пластин, имеющих форму полюсов. Вокруг этих полюсов намотаны катушки из медной проволоки. Эти первичные обмотки подключены к источнику напряжения для создания вращающегося магнитного поля. Трехфазные двигатели с обмотками, расположенными на расстоянии 120 электрических градусов друг от друга, являются стандартными для промышленного, коммерческого и бытового использования.
Ротор представляет собой еще один узел, состоящий из пластин на стальном сердечнике вала. В радиальных пазах по периферии пластин размещены стержни ротора – литые алюминиевые или медные проводники, закороченные на концах и расположенные параллельно валу. Расположение стержней ротора напоминает беличью клетку; отсюда и известный термин асинхронный двигатель с короткозамкнутым ротором.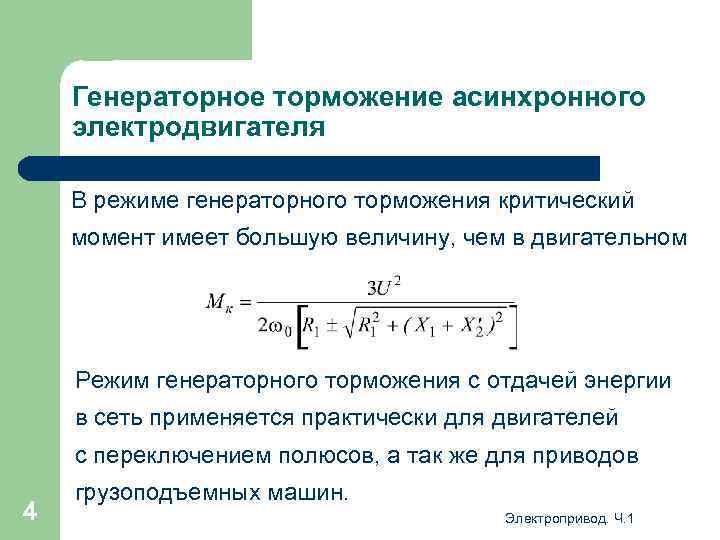 Название «асинхронный двигатель» происходит от переменного тока (AC), «индуцируемого» в ротор посредством вращающегося магнитного потока, создаваемого в статоре.
Название «асинхронный двигатель» происходит от переменного тока (AC), «индуцируемого» в ротор посредством вращающегося магнитного потока, создаваемого в статоре.
Крутящий момент двигателя создается за счет взаимодействия токов, протекающих в стержнях ротора, и вращающегося магнитного поля статора. В реальной работе скорость ротора всегда отстает от скорости магнитного поля, что позволяет стержням ротора пересекать силовые линии магнитного поля и создавать полезный крутящий момент. Эта разница скоростей называется скоростью скольжения. Скольжение также увеличивается с нагрузкой и необходимо для создания крутящего момента.
Рис. 1. Асинхронный двигатель переменного тока с короткозамкнутым ротором открыт, чтобы показать конструкцию статора и ротора, вал с подшипниками и охлаждающий вентилятор.
Скольжение зависит от параметров двигателя
По формальному определению скольжение (с) асинхронного двигателя составляет:
Для малых значений скольжения двигателя скольжение (s) пропорционально сопротивлению ротора, частоте напряжения статора и моменту нагрузки и обратно пропорционально второй степени напряжения питания. Традиционный способ управления скоростью асинхронного двигателя с фазным ротором заключается в увеличении скольжения путем добавления сопротивления в цепи ротора. Проскальзывание маломощных двигателей выше, чем у двигателей большой мощности, из-за более высокого сопротивления обмотки ротора в меньших двигателях.
Традиционный способ управления скоростью асинхронного двигателя с фазным ротором заключается в увеличении скольжения путем добавления сопротивления в цепи ротора. Проскальзывание маломощных двигателей выше, чем у двигателей большой мощности, из-за более высокого сопротивления обмотки ротора в меньших двигателях.
Как видно из таблицы 1, двигатели меньшего размера и двигатели с более низкой скоростью обычно имеют более высокое относительное скольжение. Однако также доступны большие двигатели с высоким скольжением и малые двигатели с малым скольжением.
Вы можете видеть, что скольжение при полной нагрузке варьируется от менее чем одного процента (в двигателях высокой мощности) до более чем пяти процентов (в двигателях малой мощности). Эти изменения могут вызвать проблемы с распределением нагрузки при механическом соединении двигателей разных размеров. При низкой нагрузке распределение примерно правильное, но при полной нагрузке двигатель с более низким скольжением берет на себя большую долю нагрузки, чем двигатель с более высоким скольжением.
Таблица 1. Проскальзывание выбранных двигателей NEMA из алюминия и чугуна с синхронной скоростью в диапазоне от 3600 до 900 об/мин.
Как показано на рисунке 2, скорость вращения ротора уменьшается пропорционально крутящему моменту нагрузки. Это означает, что скольжение ротора увеличивается в той же пропорции.
Рис. 2. Кривая скорости асинхронного двигателя. Скольжение — это разница скорости вращения ротора по сравнению с синхронной скоростью. CD = AD – BD = AB.
Относительно высокий импеданс ротора требуется для хороших пусковых характеристик при полном напряжении (что означает высокий крутящий момент при низком токе), а низкий импеданс ротора необходим для низкого проскальзывания скорости при полной нагрузке и высокой эффективности работы. Кривые на рис. 3 показывают, как более высокий импеданс ротора в двигателе B снижает пусковой ток и увеличивает пусковой момент, но вызывает большее скольжение, чем в стандартном двигателе A.
Рис. 3. Кривые крутящий момент/скорость и ток/скорость для стандартного двигателя A (сплошные линии) и двигателя с высоким крутящим моментом B (пунктирные линии).
Методы уменьшения проскальзывания — выбор двигателя, увеличенный размер
Использование синхронных двигателей, реактивных двигателей или двигателей с постоянными магнитами может решить проблему скольжения, поскольку в этих трех типах двигателей нет измеримого скольжения. Синхронные двигатели используются для очень мощных и очень маломощных приложений, но в меньшей степени в диапазоне средней мощности, где многие типичные промышленные приложения. Также используются реактивные двигатели, но их соотношение мощность/масса не очень хорошее, и поэтому они менее конкурентоспособны, чем асинхронные двигатели с короткозамкнутым ротором.
Потенциально растущим рынком являются двигатели с постоянными магнитами (PM), используемые с электронными приводами с регулируемой скоростью (ASD). Основные преимущества: точное регулирование скорости без проскальзывания; высокий КПД при низких потерях ротора; и гибкость выбора очень низкой базовой скорости (устранение необходимости в коробках передач). Использование двигателей с постоянными магнитами по-прежнему ограничивается некоторыми специальными приложениями, в основном из-за высокой стоимости и отсутствия стандартизации.
Основные преимущества: точное регулирование скорости без проскальзывания; высокий КПД при низких потерях ротора; и гибкость выбора очень низкой базовой скорости (устранение необходимости в коробках передач). Использование двигателей с постоянными магнитами по-прежнему ограничивается некоторыми специальными приложениями, в основном из-за высокой стоимости и отсутствия стандартизации.
Выбор асинхронного двигателя переменного тока увеличенного размера — второй способ уменьшить скольжение. Почему? — Большие двигатели обычно имеют меньшее скольжение, и скольжение уменьшается при частичной (а не полной) нагрузке двигателя.
Пример: См. Таблицу 1. Требуемая мощность составляет 10 л.с. при частоте вращения около 1800 об/мин и требуется точность скорости 1,5%. Мы знаем, что у двигателя мощностью 10 л.с. проскальзывание составляет 4,4 процента. Можем ли мы достичь точности 1,5 процента с двигателем мощностью 15 л.с.? Ответ: Проскальзывание двигателя мощностью 15 л.с. при полной нагрузке составляет 2,2%, а при нагрузке только 10/15 = 0,67. Скольжение составит 67 процентов от 2,2 и равно 1,47 процента, что соответствует установленным требованиям. Недостатки чрезмерного размера: более крупные двигатели требуют более высокого энергопотребления, что увеличивает капиталовложения и эксплуатационные расходы.
Скольжение составит 67 процентов от 2,2 и равно 1,47 процента, что соответствует установленным требованиям. Недостатки чрезмерного размера: более крупные двигатели требуют более высокого энергопотребления, что увеличивает капиталовложения и эксплуатационные расходы.
Привод переменного тока с регулируемой скоростью часто является лучшим решением
Неотъемлемые ограничения асинхронного двигателя переменного тока, упомянутые в начале этой статьи, — отсутствие постоянной скорости и регулирования скорости — могут быть решены с помощью регулируемого регулирования скорости (ASD). Наиболее распространенные сегодня приводы переменного тока основаны на широтно-импульсной модуляции (ШИМ). Постоянное линейное напряжение переменного тока с частотой 60 или 50 циклов в секунду от питающей сети выпрямляется, фильтруется, а затем преобразуется в переменное напряжение и переменную частоту. Когда этот выход преобразователя частоты подключен к двигателю переменного тока, можно регулировать скорость двигателя.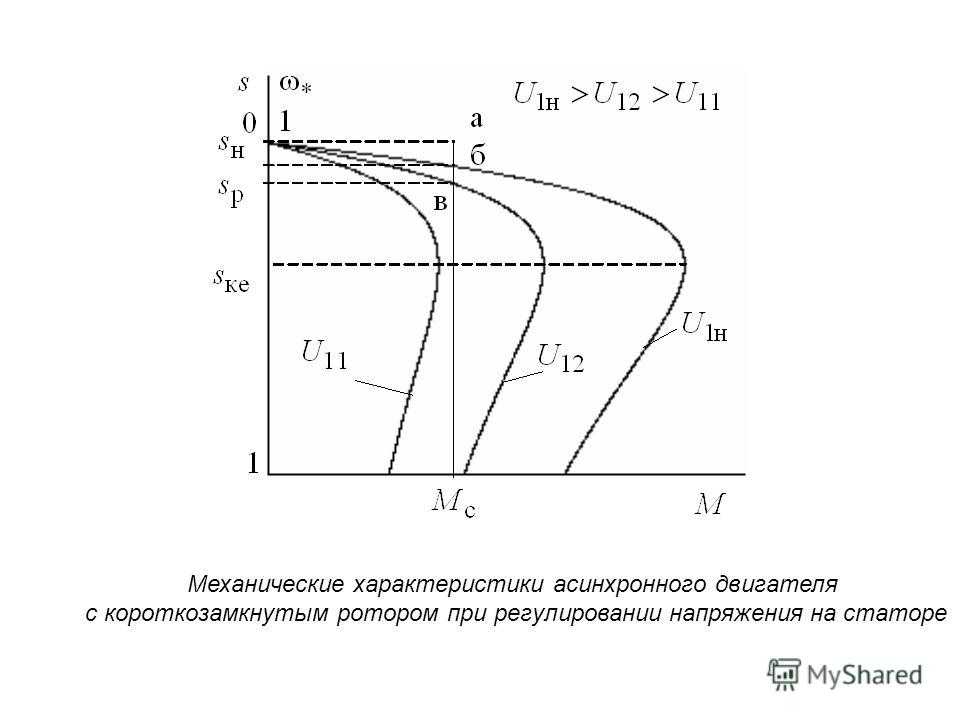
Рис. 4. Простая система управления с приводом переменного тока: регулирование скорости насоса регулирует уровень воды в водонапорной башне.
При использовании привода переменного тока для регулирования скорости двигателя во многих случаях проскальзывание двигателя больше не является проблемой. Скорость двигателя не является основным параметром управления; скорее, это может быть уровень жидкости (как на рис. 4), давление воздуха, температура газа или что-то еще. По-прежнему существует множество приводов, где требуется высокая точность статической скорости и/или точность динамической скорости. Такими приложениями являются печатные машины, экструдеры, бумагоделательные машины, краны, лифты и т. д.
Также во многих машинах и конвейерах необходимо синхронизировать управление скоростью между секциями, приводимыми в движение отдельными двигателями. Вместо увеличения мощности двигателей для устранения погрешности скорости, вызванной проскальзыванием, может быть лучше использовать состав секционных приводов с отдельными инверторами для каждого отдельного двигателя.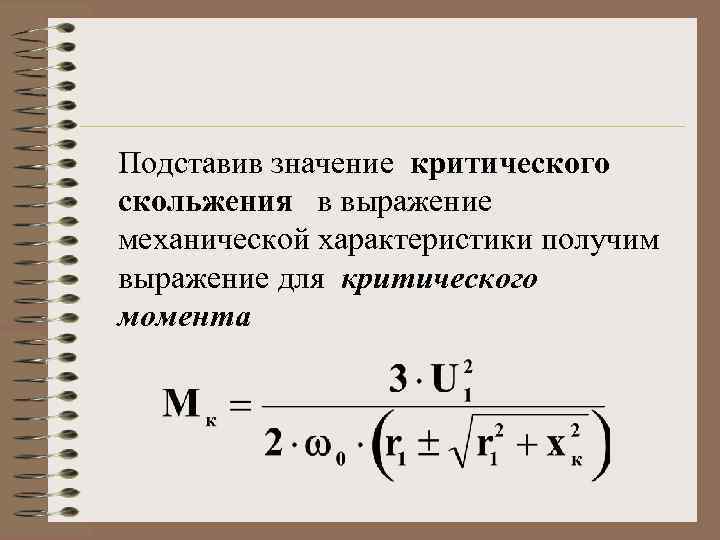 Инверторы подключены к шине постоянного напряжения, питаемой от общего выпрямителя. Это очень энергоэффективное решение, поскольку приводные секции машин могут использовать энергию торможения замедляющих секций (рекуперация).
Инверторы подключены к шине постоянного напряжения, питаемой от общего выпрямителя. Это очень энергоэффективное решение, поскольку приводные секции машин могут использовать энергию торможения замедляющих секций (рекуперация).
Компенсация скольжения может быть добавлена к приводам переменного тока, чтобы уменьшить эффект скольжения двигателя. Сигнал крутящего момента нагрузки добавляется к регулятору скорости для увеличения выходной частоты пропорционально нагрузке. Компенсация скольжения не может составлять 100 % от величины скольжения из-за колебаний температуры ротора, которые могут вызвать чрезмерную компенсацию и нестабильное управление. Но компенсация может достигать точности до 80 процентов, а это означает, что скольжение может быть уменьшено с 2,4 процента до примерно 0,5 процента.
Рис. 5. Эффект компенсации скольжения.
Векторное и прямое управление крутящим моментом улучшает управление скоростью
Новейшими высокопроизводительными технологиями в области приводов с регулируемой скоростью являются векторное управление и прямое управление крутящим моментом, DTC™. Оба они используют какую-то модель двигателя и подходящие алгоритмы управления для управления крутящим моментом и потоком двигателя вместо параметров напряжения и частоты, используемых в приводах с ШИМ. Разница между традиционным векторным управлением и DTC заключается в том, что DTC не имеет фиксированной схемы переключения для каждого цикла напряжения. DTC, технология, принадлежащая ABB, вместо этого переключает инвертор в соответствии с потребностями нагрузки, рассчитанными/регулируемыми 40 000 раз в секунду. Это делает DTC особенно быстрым во время мгновенных изменений нагрузки и сводит к минимуму необходимость/эффект резких изменений скорости, когда нагрузка/процесс находится в работе.
Оба они используют какую-то модель двигателя и подходящие алгоритмы управления для управления крутящим моментом и потоком двигателя вместо параметров напряжения и частоты, используемых в приводах с ШИМ. Разница между традиционным векторным управлением и DTC заключается в том, что DTC не имеет фиксированной схемы переключения для каждого цикла напряжения. DTC, технология, принадлежащая ABB, вместо этого переключает инвертор в соответствии с потребностями нагрузки, рассчитанными/регулируемыми 40 000 раз в секунду. Это делает DTC особенно быстрым во время мгновенных изменений нагрузки и сводит к минимуму необходимость/эффект резких изменений скорости, когда нагрузка/процесс находится в работе.
Что такое прямое управление крутящим моментом, DTC?
DTC — это оптимизированный принцип управления приводами переменного тока, в котором переключение инвертора напрямую управляет потоком и крутящим моментом двигателя/нагрузки.
Рис. 6.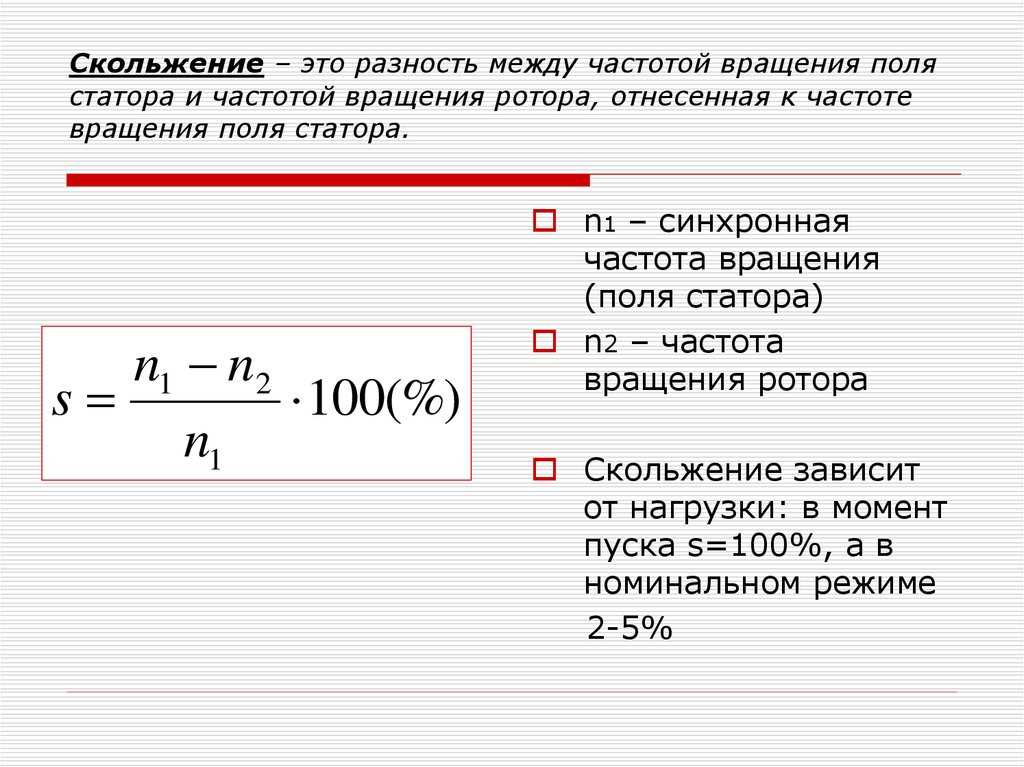 Блок-схема прямого управления крутящим моментом, DTC.
Блок-схема прямого управления крутящим моментом, DTC.
Измеряемыми входными значениями для управления DTC являются ток двигателя , звено постоянного тока и напряжение. Напряжение определяется по напряжению звена постоянного тока и положениям переключателя инвертора. Сигналы напряжения и тока являются входными данными для точной модели двигателя, которая выдает точное фактическое значение магнитного потока и крутящего момента статора каждые 25 микросекунд.
Двухуровневые компараторы крутящего момента и магнитного потока двигателя сравнивают фактические значения с эталонными значениями, выдаваемыми эталонными контроллерами крутящего момента и магнитного потока. Выходы этих двухуровневых контроллеров обновляются каждые 25 микросекунд и указывают, нужно ли изменять крутящий момент или магнитный поток.
В зависимости от выходных сигналов двухуровневых контроллеров логика переключения напрямую определяет оптимальные положения переключателя инвертора.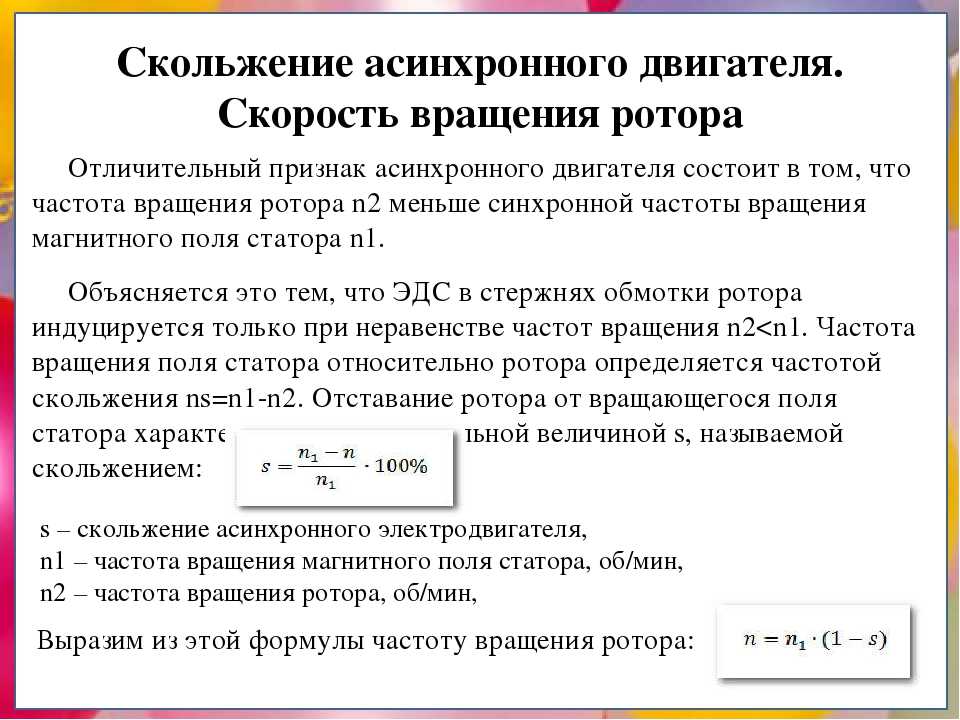 Это означает, что каждый отдельный импульс напряжения определяется отдельно на «атомарном уровне». Положения переключателя инвертора снова определяют напряжение и ток двигателя, которые, в свою очередь, влияют на крутящий момент и магнитный поток двигателя (поскольку этот контур управления замкнут, в большинстве приложений отпадает необходимость в энкодерах).
Это означает, что каждый отдельный импульс напряжения определяется отдельно на «атомарном уровне». Положения переключателя инвертора снова определяют напряжение и ток двигателя, которые, в свою очередь, влияют на крутящий момент и магнитный поток двигателя (поскольку этот контур управления замкнут, в большинстве приложений отпадает необходимость в энкодерах).
Рис. 7. Сравнение ШИМ-модуляции и управления приводом DTC во время воздействия нагрузки: от A до B с управлением PWM и от A до C с управлением DTC.
Причина, по которой управление DTC реагирует быстрее, чем управление PWM, показана на рис. 7. Двигатель работает с низкой нагрузкой в точке A, и нагрузка ступенчато увеличивается до высокой нагрузки. Более высокий крутящий момент при ШИМ-контроле достигается за счет снижения скорости от A до B. Это довольно медленная процедура. Более высокий крутящий момент при управлении DTC достигается прямым увеличением крутящего момента от A до C, и эта процедура примерно в десять раз (10 раз) быстрее, чем при управлении PWM.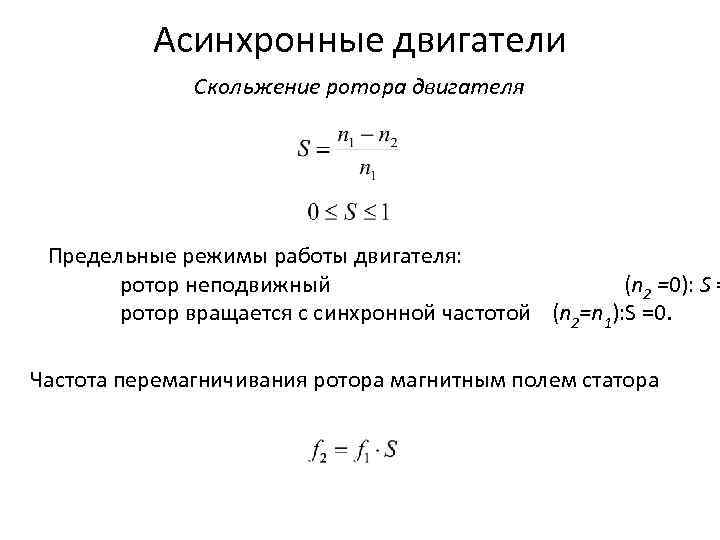
Компенсация скольжения с помощью DTC происходит мгновенно и обеспечивает точность, которая обычно составляет 10 % от номинального скольжения двигателя. Это означает точность скорости от 0,1 до 0,5 процента. Это позволяет использовать приводы DTC во многих приложениях, где ранее требовалось векторное управление на основе тахометра. Для приложений, требующих еще более высокой точности, к приводу DTC можно добавить импульсный энкодер.
Свяжитесь с автором по адресу: [email protected]
За дополнительной информацией о ABB Drives & Power Electronics обращайтесь: Бекки Нетери, менеджер по маркетинговым коммуникациям, ABB Inc., подразделение продуктов автоматизации, приводы и силовая электроника, 16250 West Glendale Drive New Berlin, WI 53151-2840, тел: (262 ) 785-8363, факс: (262) 780-5120, электронная почта: [email protected], http://www.abb-drives.com
Минимизация пробуксовки асинхронного двигателя переменного тока Асинхронный двигатель часто называют рабочей лошадкой в отрасли, потому что он предлагает пользователям простую, прочную конструкцию, простоту обслуживания и экономичную цену.
 Эти факторы способствовали стандартизации и развитию производственной инфраструктуры, что привело к созданию обширной установленной базы двигателей; более 90% всех двигателей, используемых в мировой промышленности, являются асинхронными двигателями переменного тока.
Эти факторы способствовали стандартизации и развитию производственной инфраструктуры, что привело к созданию обширной установленной базы двигателей; более 90% всех двигателей, используемых в мировой промышленности, являются асинхронными двигателями переменного тока.
Несмотря на такую популярность, асинхронный двигатель переменного тока имеет два основных ограничения. Стандартный двигатель не является настоящей машиной с постоянной скоростью и по своей природе не способен обеспечить работу с переменной скоростью. Оба ограничения требуют рассмотрения, поскольку требования к качеству и точности двигателей/приводов продолжают расти.
В этой статье будут рассмотрены причины проскальзывания и способы его минимизации. Кроме того, в нем будут подробно описаны наилучшие доступные в настоящее время методы управления скоростью двигателя с помощью силовой электроники, включая технологию, позволяющую минимизировать негативные последствия скольжения.
Проскальзывание двигателя необходимо для создания крутящего момента. Асинхронный двигатель переменного тока состоит из двух основных узлов: статора и ротора. Конструкция статора состоит из стальных пластин, имеющих форму полюсов. Вокруг этих полюсов намотаны катушки из медной проволоки. Эти первичные обмотки подключены к источнику напряжения для создания вращающегося магнитного поля. Трехфазные двигатели с обмотками, расположенными на расстоянии 120 электрических градусов друг от друга, являются стандартными для промышленного, коммерческого и бытового использования.
Асинхронный двигатель переменного тока состоит из двух основных узлов: статора и ротора. Конструкция статора состоит из стальных пластин, имеющих форму полюсов. Вокруг этих полюсов намотаны катушки из медной проволоки. Эти первичные обмотки подключены к источнику напряжения для создания вращающегося магнитного поля. Трехфазные двигатели с обмотками, расположенными на расстоянии 120 электрических градусов друг от друга, являются стандартными для промышленного, коммерческого и бытового использования.
Ротор представляет собой еще один узел, состоящий из пластин на стальном сердечнике вала. В радиальных пазах по периферии пластин размещены стержни ротора, которые представляют собой литые алюминиевые или медные проводники, закороченные на концах и расположенные параллельно валу. Расположение стержней ротора похоже на короткозамкнутый ротор, отсюда и известный термин «асинхронный двигатель с короткозамкнутым ротором» ( Фото выше). Термин «асинхронный двигатель» происходит от переменного тока (AC), который «индуцируется» в ротор посредством вращающегося магнитного потока, создаваемого в статоре.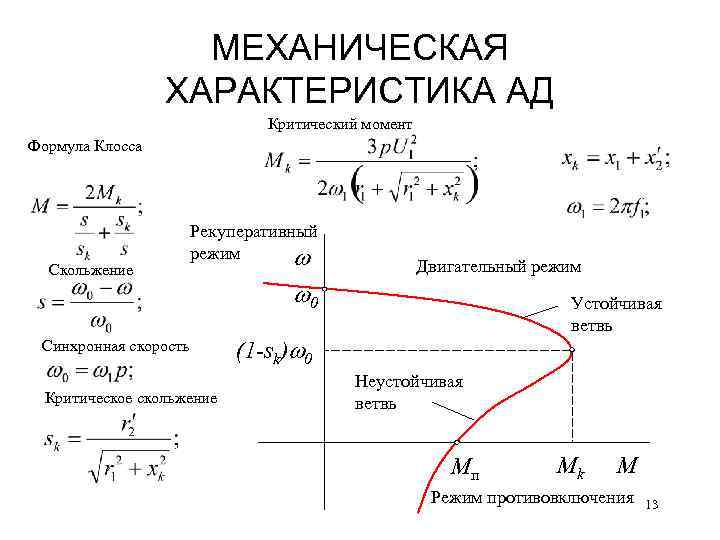
Крутящий момент двигателя создается за счет взаимодействия токов, протекающих в стержнях ротора, и вращающегося магнитного поля статора. В реальной работе скорость ротора всегда отстает от скорости магнитного поля, что позволяет стержням ротора пересекать силовые линии магнитного поля и создавать полезный крутящий момент. Эта разница скоростей называется скоростью скольжения. Скольжение также увеличивается с нагрузкой и необходимо для создания крутящего момента.
Скольжение зависит от параметров двигателя. Согласно формальному определению, скольжение (S) асинхронного двигателя можно найти с помощью следующего уравнения:
с = [(n 2 — n)/n с ] x 100%
, где n с — синхронная скорость, а n — фактическая скорость.
При небольших значениях скольжения двигателя скольжение пропорционально сопротивлению ротора, частоте напряжения статора и крутящему моменту нагрузки. Оно обратно пропорционально второй степени питающего напряжения. Традиционный способ управления скоростью асинхронного двигателя с фазным ротором заключается в увеличении скольжения путем добавления сопротивления в цепи ротора. Проскальзывание маломощных двигателей выше, чем у двигателей большой мощности, из-за более высокого сопротивления обмотки ротора в меньших двигателях.
Традиционный способ управления скоростью асинхронного двигателя с фазным ротором заключается в увеличении скольжения путем добавления сопротивления в цепи ротора. Проскальзывание маломощных двигателей выше, чем у двигателей большой мощности, из-за более высокого сопротивления обмотки ротора в меньших двигателях.
Как видно из приведенной выше таблицы , двигатели меньшего размера и двигатели с более низкой скоростью обычно имеют большее относительное скольжение. Однако также доступны большие двигатели с высоким скольжением и малые двигатели с малым скольжением.
Вы можете видеть, что проскальзывание при полной нагрузке варьируется от менее 1% в двигателях высокой мощности до более 5% в двигателях малой мощности. Эти изменения могут вызвать проблемы с распределением нагрузки при механическом соединении двигателей разных размеров. При низкой нагрузке распределение обычно не представляет проблемы, но при полной нагрузке двигатель с более низким скольжением берет на себя более высокую долю нагрузки, чем двигатель с более высоким скольжением.
Как показано на рис. 1 справа, скорость вращения ротора уменьшается пропорционально крутящему моменту нагрузки. Это означает, что скольжение ротора увеличивается в той же пропорции.
Относительно высокий импеданс ротора необходим для хорошего пуска при полном или полном напряжении. Другими словами, требуется высокий крутящий момент при низком токе. Низкий импеданс ротора также необходим для низкого проскальзывания скорости при полной нагрузке и высокой эффективности работы. Кривые в Рис. 2 показывают, как более высокий импеданс ротора в двигателе B снижает пусковой ток и увеличивает пусковой момент, но вызывает большее скольжение, чем в стандартном двигателе A.
Способы уменьшения скольжения. Синхронные двигатели, реактивные двигатели или двигатели с постоянными магнитами (PM) могут решить проблему скольжения, поскольку в этих трех типах двигателей нет измеримого скольжения. Синхронные двигатели используются для приложений с очень высокой и малой мощностью, но в меньшей степени в диапазоне средней мощности, на который приходится множество типичных промышленных приложений. Также используются реактивные двигатели, но их соотношение мощность/вес не очень хорошее, поэтому они менее конкурентоспособны, чем асинхронные двигатели с короткозамкнутым ротором. Двигатели с постоянными магнитами, которые используются с электронными частотно-регулируемыми приводами (ASD), обеспечивают точное регулирование скорости без проскальзывания, высокий КПД с низкими потерями в роторе и возможность выбора очень низкой базовой скорости, что устраняет необходимость в коробках передач. Тем не менее, двигатели с постоянными магнитами по-прежнему ограничены некоторыми специальными приложениями, в основном из-за высокой стоимости и отсутствия стандартизации.
Также используются реактивные двигатели, но их соотношение мощность/вес не очень хорошее, поэтому они менее конкурентоспособны, чем асинхронные двигатели с короткозамкнутым ротором. Двигатели с постоянными магнитами, которые используются с электронными частотно-регулируемыми приводами (ASD), обеспечивают точное регулирование скорости без проскальзывания, высокий КПД с низкими потерями в роторе и возможность выбора очень низкой базовой скорости, что устраняет необходимость в коробках передач. Тем не менее, двигатели с постоянными магнитами по-прежнему ограничены некоторыми специальными приложениями, в основном из-за высокой стоимости и отсутствия стандартизации.
Выбор асинхронного двигателя переменного тока увеличенной мощности — еще один способ уменьшить скольжение. Большие двигатели обычно изначально имеют более низкое значение скольжения, и скольжение уменьшается при частичной, а не полной нагрузке двигателя. Недостатком двигателя большего размера является то, что при большем двигателе увеличивается потребление энергии, что увеличивает инвестиции и эксплуатационные расходы.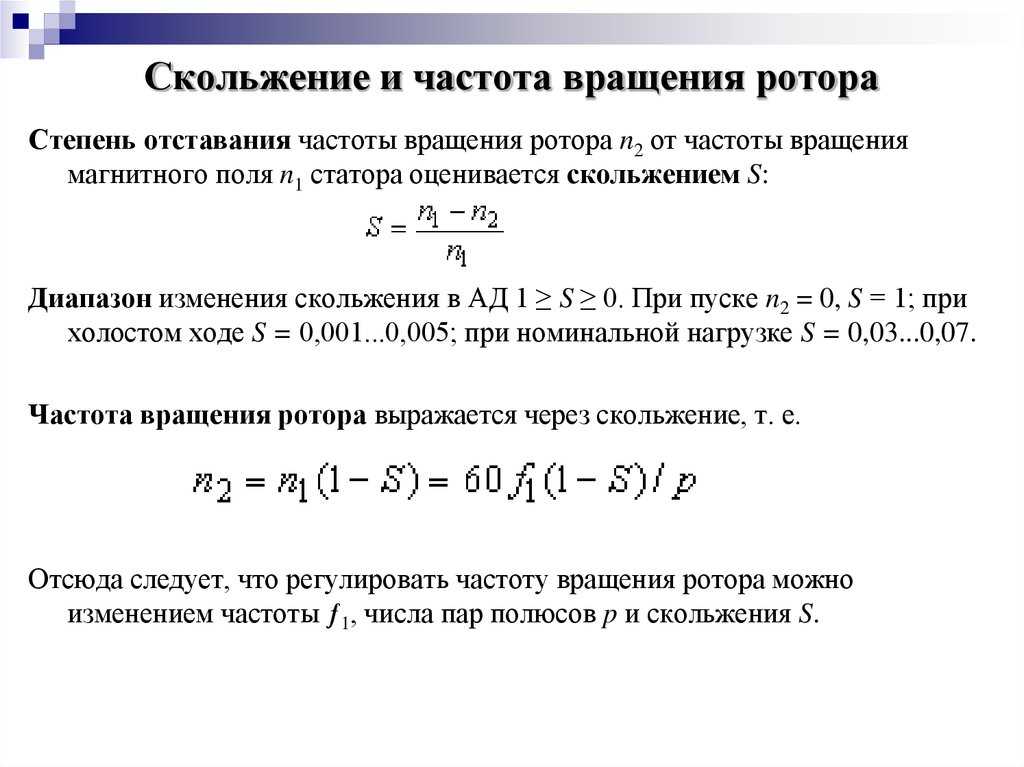
Часто лучшим решением является привод переменного тока с регулируемой скоростью. Ограничения, присущие асинхронному двигателю переменного тока, можно устранить с помощью преобразователей частоты. Наиболее распространенные сегодня приводы переменного тока основаны на широтно-импульсной модуляции (ШИМ). Постоянное линейное напряжение переменного тока с частотой 60 циклов в секунду от питающей сети выпрямляется, фильтруется, а затем преобразуется в переменное напряжение и переменную частоту. Когда этот выход преобразователя частоты подключен к двигателю переменного тока, можно регулировать скорость двигателя.
При использовании привода переменного тока для регулировки скорости двигателя во многих случаях проскальзывание двигателя больше не является проблемой. Скорость двигателя не является основным параметром управления. Скорее, это может быть уровень жидкости, давление воздуха, температура газа или какой-либо другой управляющий параметр.
Высокая точность статической скорости и/или точность динамической скорости по-прежнему требуется во многих приводных устройствах, таких как печатные машины, экструдеры, бумагоделательные машины, краны и лифты.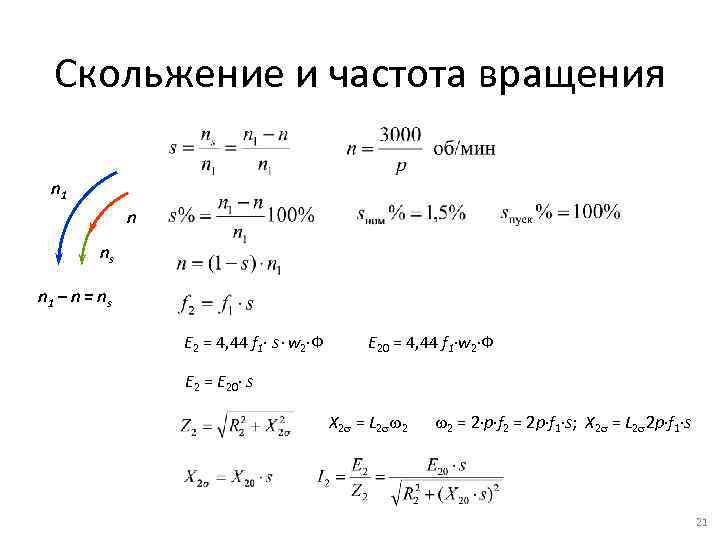 Есть также много машин и конвейеров, где управление скоростью между секциями, приводимыми в движение отдельными двигателями, должно быть синхронизировано. Вместо увеличения мощности двигателей для устранения ошибки скорости, вызванной проскальзыванием, может быть лучше использовать секционные приводы с отдельными инверторами для каждого отдельного двигателя. Инверторы подключены к шине постоянного напряжения, питаемой от общего выпрямителя. Это очень энергоэффективное решение, поскольку приводные секции машин могут использовать энергию торможения от замедляющих секций (рекуперация).
Есть также много машин и конвейеров, где управление скоростью между секциями, приводимыми в движение отдельными двигателями, должно быть синхронизировано. Вместо увеличения мощности двигателей для устранения ошибки скорости, вызванной проскальзыванием, может быть лучше использовать секционные приводы с отдельными инверторами для каждого отдельного двигателя. Инверторы подключены к шине постоянного напряжения, питаемой от общего выпрямителя. Это очень энергоэффективное решение, поскольку приводные секции машин могут использовать энергию торможения от замедляющих секций (рекуперация).
Компенсация скольжения может быть добавлена даже к приводам переменного тока для дальнейшего снижения эффекта скольжения двигателя. Сигнал крутящего момента нагрузки добавляется к регулятору скорости для увеличения выходной частоты пропорционально нагрузке. Компенсация скольжения не может составлять 100 % от величины скольжения из-за колебаний температуры ротора, которые могут вызвать перекомпенсацию и нестабильное управление.