Содержание
Синхронный двигатель: принцип работы, устройство, назначение
Синхронные электродвигатели (СД) не так распространены, как асинхронные с короткозамкнутым ротором. Но используются там, где нужен большой крутящий момент и в процессе работы будут происходить частые перегрузки. Также такой тип двигателей используются там, где нужна большая мощность, чтобы приводить в движение механизмы, благодаря высокому коэффициенту мощности и возможности улучшать коэффициент мощности сети, что существенно снизит затраты на электроэнергию и нагрузку на линии. Что такое синхронный двигатель, где он используется и какие у него плюсы минусы мы рассмотрим в этой статье.
- Определение и принцип действия
- Конструкция ротора
- Пуск синхронного двигателя
- Виды
- Сфера применения
- Преимущества и недостатки
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
N=60f/p
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.
Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).
Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
Ниже вы видите условное обозначение на схеме синхронной машины.
Конструкция ротора
Как и любой другой, синхронный электродвигатель состоит из двух основных частей:
- Статор.
 В нём расположены обмотки. Его еще называют якорем.
В нём расположены обмотки. Его еще называют якорем. - Ротор. На нём устанавливают постоянные магниты или обмотку возбуждения. Его также называют индуктором, из-за его предназначения — создавать магнитное поле).
 В нём расположены обмотки. Его еще называют якорем.
В нём расположены обмотки. Его еще называют якорем.Для подачи тока в обмотку возбуждения на роторе устанавливают 2 кольца (так как возбуждение постоянным током, на одно из них подают «+», а на другое «—»). Щетки закреплены на щеткодержателе.
Роторы у синхронных электродвигателей переменного тока бывают двух типов, в зависимости от назначения:
- Явнополюсные. Четко видны полюса (катушки). Используют при малых скоростях и большом числе полюсов.
- Неявнополюсные – выглядит как круглая болванка, в прорези на которой уложены провода обмоток. Используют при больших скоростях вращения (3000, 1500 об/мин) и малом числе полюсов.
Пуск синхронного двигателя
Особенностью этого вида электрических машин является то, что его нельзя просто подключить к сети и ожидать его запуска. Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.
Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.
Запуск происходит как у асинхронного двигателя, а для создания пускового момента кроме обмотки возбуждения на роторе размещают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после чего он и ток статора совершает колебания, двигатель входит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов мощных машин иногда уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор или резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превышает сопротивление самой обмотки в 5 — 10 раз. Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Виды
Видов таких машин очень много, выше была описана конструкция синхронного электродвигателя переменного тока с обмотками возбуждения, как самого распространенного на производстве. Есть и другие типы, такие как:
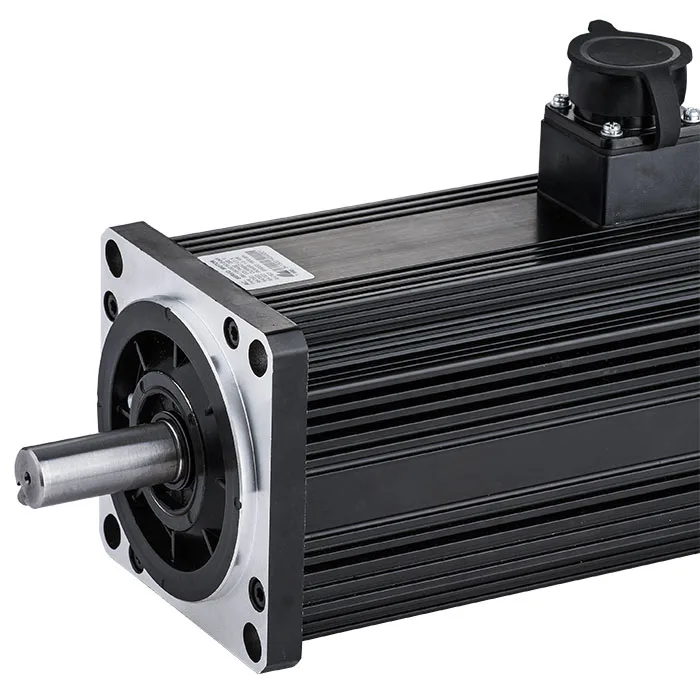
- Синхронные двигатели с постоянными магнитами. Это различные электродвигатели, такие как PMSM – permanent magnet synchronous motor, BLDC – Brushless Direct Current и прочие. Отличия, между которыми, состоят в способе управления и форме тока (синусоидальная или трапецивиденая). Их еще называют бесколлекторными или бесщеточными двигателями. Используются в станках, радиоуправляемых моделях, электроинструменте и т.д. Они работают не напрямую от постоянного тока, а через специальный преобразователь.
- Шаговые двигатели — синхронные бесщеточные двигатели, у которых ротор точно удерживает заданное положение, их используют для позиционирование рабочего инструмента в ЧПУ станках и для управления различными элементами автоматических систем (например, положение дроссельной заслонки в автомобиле). Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
- Реактивные.
- Гистерезисные.
- Реактивно-гистерезисные.
 Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.Последние три типа СД также не имеют щеток, они работают за счет особой конструкции ротора. У реактивных СД различают три их конструкции: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор. Объяснение принципа их работы достаточно сложно, и займет большой объём, поэтому мы опустим его. Такие электродвигатели на практике вы, скорее всего, встретите нечасто. В основном это маломощные машины, используемые в автоматике.
Сфера применения
Синхронные двигатели стоят дороже чем асинхронные, к тому же требуют дополнительного источника постоянного тока возбуждения – это отчасти снижает ширину области применения этого вида электрических машин. Однако, синхронные электродвигатели используют для привода механизмов, где возможны перегрузки и требуется точное поддерживание стабильных оборотов.
При этом чаще всего используются в области больших мощностей — сотен киловатт и единиц мегаватт, и, при этом, пуск и остановка происходят достаточно редко, то есть машины работают круглосуточно долгое время. Такое применение обусловлено тем, что синхронные машины работают с cosФи приближенном к 1, и могут выдавать реактивную мощность в сеть, в результате чего улучшается коэффициент мощности сети и снижается её потребление, что важно для предприятий.
Преимущества и недостатки
Если говорить простыми словами, то у любой электрической машины есть свои плюсы и минусы. У синхронного двигателя положительными сторонами является:
- Работа с cosФи=1, благодаря возбуждению постоянным током, соответственно они не потребляют реактивной мощности из сети.
- При работе, с перевозбуждением отдают реактивную мощность в сеть, улучшая коэффициент мощности сети, падение напряжения и потери в ней и повышается КМ генераторов электростанциях.
- Максимальный момент, развиваемый на валу СД, пропорционален U, а у АД — U² (квадратичная зависимость от напряжения). Это значит, что у СД хорошая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.
- В следствие всего этого скорость вращения стабильна при перегрузках и просадках, в пределах перегрузочной способности, особенно при повышении тока возбуждения.
 Это значит, что у СД хорошая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.
Это значит, что у СД хорошая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.Однако существенным недостатком синхронного двигателя является то, что его конструкция сложнее, чем у асинхронных с КЗ-ротором, нужен возбудитель, без которого он не сможет работать. Всё это приводит к большей стоимости по сравнению с асинхронными машинами и сложностями в обслуживании и эксплуатации.
Пожалуй, на этом достоинства и недостатки синхронных электродвигателей заканчиваются. В этой статье мы постарались кратко изложить общие сведения о синхронных электродвигателях. Если у вас есть чем дополнить материал – пишите в комментариях.
Материалы по теме:
- Что такое ротор и статор
- Как передается электроэнергия на расстояния без проводов
- Что такое частотный преобразователь
8.
 Синхронные двигатели. Технические средства автоматизации и управления. Учебное пособие
Синхронные двигатели. Технические средства автоматизации и управления. Учебное пособие
8.1. Принцип действия и виды синхронных двигателей
8.2. Специальные синхронные двигатели
8.2.1. Гистерезисные двигатели
8.2.2. Шаговые двигатели
8.3. Бесконтактные двигатели переменного тока
8.1. Принцип действия и виды синхронных двигателей
Синхронные двигатели СД небольшой мощности применяются в системах автоматики. Поскольку в синхронных двигателях частота вращения жестко связана с частотой питания, такие двигатели применяются либо в системах, требующих строго постоянной частоты вращения, либо при частотном управлении скоростью.
В цифровых системах автоматики находят широкое применение шаговые двигатели, в обмотки статора которых поступают импульсы тока и при поступлении каждого импульсов происходит поворот ротора на определенный угол — двигатель совершает шаг. К группе синхронных двигателей можно отнести также двигатели, частота питания которых зависит от частоты вращения — это так называемые вентильные двигатели.
К группе синхронных двигателей можно отнести также двигатели, частота питания которых зависит от частоты вращения — это так называемые вентильные двигатели.
Статор синхронной машины выполнен аналогично статору асинхронной машины. На нем расположена -фазная (обычно трехфазная) обмотка.. Она создают вращающееся магнитное поле. У синхронной машины может быть ротор различного типа. В любом случае ротор СД создает постоянный по величине вектор магнитного потока, направление которого меняется в зависимости от положения ротора. Взаимодействие полей ротора и статор создает вращающий момент двигателя. Наибольший момент возникает тогда, когда угол между векторами полей ротора и статора близок к нулю. Ротор вращается синхронно с полем статора, поэтому двигатель называется синхронным.
|
nр = nс= (60f)/p.
|
(3.1.2)
|
Где f – частота напряжения статора, а p – число пар полюсов.
1. У СД с обмоткой на роторе ротор состоит из сердечника с обмоткой возбуждения. Обмотка возбуждения через контактные кольца подключается к источнику постоянного тока. Ток обмотки возбуждения создает магнитное поле, намагничивающее ротор. Роторы таких машин могут быть явнополюсными (с явновыраженными полюсами) и неявнополюсными (с неявновыраженными полюсами). Электромагнитная схема синхронной машины имеет вид (рис90):
Рис. 90. Электромагнитная схема СД (а), схема ее включения (б), характеристика (с)
Обмотка ротора 4 состоит из одной или нескольких катушек, образующих многополосную систему с тем же числом пар полюсов р, что и обмотка статора 3. Обмотка ротора соединяется с внешним источником питания Uв посредством контактных колец 5 и щеток 6.
2. Синхронный двигатель, на роторе которого отсутствует обмотка возбуждения, называется синхронным реактивным двигателем. Ротор синхронного реактивного двигателя изготавливается из ферромагнитного материала и должен иметь явновыраженные полюсы. Рис. 91.
Ротор синхронного реактивного двигателя изготавливается из ферромагнитного материала и должен иметь явновыраженные полюсы. Рис. 91.
Рис. 91. Роторы синхронных реактивных микродвигателей
Вращающееся магнитное поле статора намагничивает ротор. Явнополюсный ротор имеет неодинаковые магнитные сопротивления по продольной и поперечной осям полюса. Силовые линии магнитного поля статора изгибаются, стремясь пройти по пути с меньшим магнитным сопротивлением. Деформация магнитного поля вызовет, вследствие упругих свойств силовых линий, реактивный момент, вращающий ротор синхронно с полем статора. Если к вращающемуся ротору приложить тормозной момент, ось магнитного поля ротора повернется на угол θ относительно оси магнитного поля статора. С увеличением нагрузки этот угол возрастает. Если нагрузка превысит некоторое допустимое значение, двигатель остановится, выпадет из синхронизма. Рис 92..
Рис. 92. Принцип действия синхронного реактивного двигателя
92. Принцип действия синхронного реактивного двигателя
Электромагнитный момент синхронного реактивного двигателя без учета активного сопротивления статора r1 выражается следующей зависимостью:
|
,
|
(3.2.1)
|
где xd и xq — синхронные индуктивные сопротивления по продольной и поперечной осям машины. Начальный пусковой момент у этих двигателей равен 0. Поэтому в них применяется асинхронный способ пуска, для чего используется короткозамкнутая обмотка на роторе. Реактивные двигатели проще по конструкции, дешевле и надежнее в эксплуатации, чем обычные синхронные машины с обмоткой возбуждения на роторе.
Основные недостатки двигателей: низкий cosφ и КПД, большие размеры, малая величина максимального момента. В двигателе мощностью несколько десятков ватт КПД составляет 0,3. ..0,4, а мощностью до 10 ватт — менее 0,2. Так как момент двигателя пропорционален U2, то двигатель чувствителен к колебаниям питающего напряжения.
..0,4, а мощностью до 10 ватт — менее 0,2. Так как момент двигателя пропорционален U2, то двигатель чувствителен к колебаниям питающего напряжения.
3. СД постоянными магнитами. По способу пуска эти двигатели делятся: на самозапускающиеся двигатели и двигатели с асинхронным пуском. Самозапускающиеся двигатели выполняются на небольшие мощности (обычно доли ватта) и низкие частоты вращения (не более 400 об/мин). Они рассчитываются на работу от однофазной сети переменного тока. Их магнитное поле либо пульсирует, либо имеет резко выраженный эллиптический характер. Пуск этих двигателей происходит за полпериода изменения тока за счет всегда существующего в синхронных двигателях пульсирующего момента. Нагрузка должна быть малоинерционной. В противном случае они пускаются в холостую а затем нагружаются. Для пуска используются различные устройства, обеспечивающие вращение двигателя в заданном направлении, например . клювообразные полюса статора -. КПД таких двигателей невелик – 3÷5 % и менее.
КПД таких двигателей невелик – 3÷5 % и менее.
Синхронные микродвигатели с асинхронным пуском имеют на роторе короткозамкнутую обмотку типа «беличьей клетки», которая выполняется в полюсных наконечниках. Эта обмотка во время пуска участвует в создании асинхронного момента и разгоняет двигатель до скорости, близкой к синхронной. В синхронном режиме она демпфирует колебания ротора при резких изменениях нагрузки.
4. Пуск и вход в синхронизм СД.
Недостатком СД является то, что управление скоростью возможно только через изменение частоты вращения поля, а следовательно, частоты питающего напряжения. Недостатком СД является то, что двигатель должен войти в синхронизм, недостатком является также малый пусковой момент, поэтому, чтобы запустить двигатель, необходимы дополнительные меры. У синхронных двигателей отсутствует пусковой момент. Это объясняется тем, что электромагнитный вращающий момент, воздействующий на неподвижный ротор, меняет свое направление два раза за период Т переменного тока.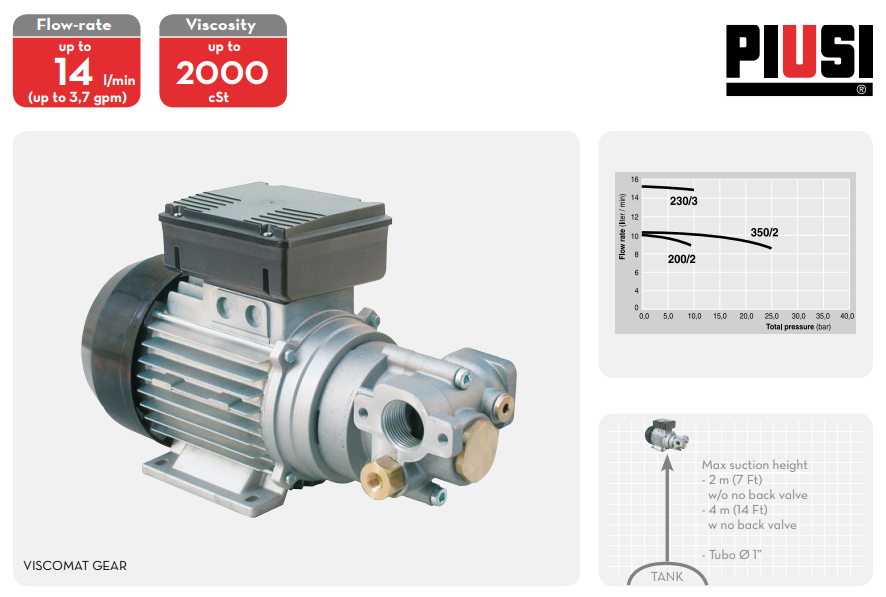 Из-за своей инерционности, ротор не успевает тронуться с места и развить необходимое число оборотов.
Из-за своей инерционности, ротор не успевает тронуться с места и развить необходимое число оборотов.
Подавляющее большинство синхронных микродвигателей пускается как асинхронные, для чего они или снабжаются пусковой обмоткой или используется схема включения СД с асинхронным запуском. Рис. 93.
Рис. 93. Схема включения СД с асинхронным запуском
Здесь, на роторе находится обмотка, которая в момент запуска замыкается либо накоротко, либо на внешнее сопротивление. В этом случае двигатель ведет себя как асинхронный и у него есть значительный пусковой момент. Когда ротор разгоняется до скорости, близкой к скорости поля, ключ переключается в другое положение и на ротор подается постоянное напряжение. Такой СД при пуске асинхронно разгоняется до 90-95% от скорости поля, затем входит в синхронизацию и далее ведет себя, как синхронный. Есть другая модификация, у которой на роторе есть дополнительная короткозамкнутая обмотка, например, беличья клетка. Эти обмотки работают лишь при запуске. Когда частота вращения ротора приближается к частоте вращения поля, и двигатель вращается с синхронной скоростью, короткозамкнутая обмотка не перемещается относительно поля, вихревые токи в ней не индуктируются, асинхронный пусковой момент становится равным нулю.
Эти обмотки работают лишь при запуске. Когда частота вращения ротора приближается к частоте вращения поля, и двигатель вращается с синхронной скоростью, короткозамкнутая обмотка не перемещается относительно поля, вихревые токи в ней не индуктируются, асинхронный пусковой момент становится равным нулю.
Процесс входа в синхронизм является сложным и ответственным моментом в работе синхронных микродвигателей. Ротор, достигший скорости близкой к синхронной должен за счет взаимодействия полей статора и ротора (в двигателе с постоянными магнитами) или упругих свойств линий поля (в синхронном реактивном двигателе) скачком втянуться в синхронизм. Поэтому момент входа в синхронизм в сильной степени зависит от момента инерции ротора и момента нагрузки.
8.2. Специальные синхронные двигатели
В автоматике используется СД малой мощности, от 0,1 до 500 Вт, Есть различные типы СД: редукторные, гистерезисные, бесконтактные, различные виды шаговых двигателей.
8.2.1. Гистерезисные двигатели
Гистерезисным двигателем называется синхронный двигатель, в котором вращающий момент создается за счет явления гистерезиса при перемагничивания ферромагнитного материала ротора. Статор гистерезисного двигателя подобен статору обычной машины переменного тока. Ротор представляет собой стальной цилиндр из ферромагнитного магнитотвердого материала (имеющего широкую петлю гистерезиса) без обмотки. С целью удешевления ротор делают сборным: кольцо из ферромагнитного материала и немагнитная или магнитомягкая втулка (рис.94).
Рис. 94. Ротор гистерезисного двигателя и схема возникновения гистерезисного момента
В гистерезисном двигателе ротор, вращающийся с синхронной скоростью, представляет собой постоянный магнит. Так как ротор выполнен из магнита твердого материала, то элементарные магнитики перемагничиваются не мгновенно, а с отставанием из-за гистерезиса, это и создает гистерезисный момент. Ось магнита из-за явления гистерезиса отстает от оси вращающегося магнитного поля на угол θг гистерезисного сдвига, вследствие чего возникает тангенциальная составляющая fг сил взаимодействия между полюсами ротора и потоком статора. Величина силы fг и создаваемый ею момент не зависят от скорости вращения, а определяются шириной петли гистерезиса ферромагнитного материала.
Ось магнита из-за явления гистерезиса отстает от оси вращающегося магнитного поля на угол θг гистерезисного сдвига, вследствие чего возникает тангенциальная составляющая fг сил взаимодействия между полюсами ротора и потоком статора. Величина силы fг и создаваемый ею момент не зависят от скорости вращения, а определяются шириной петли гистерезиса ферромагнитного материала.
Если нагрузочный момент больше Мг, то двигатель перейдет в асинхронный режим работы, т.е. появится дополнительный асинхронный момент Ма. Движущий момент ротора создается двумя составляющими: моментом вихревых токов и гистерезисным моментом. Рис. 95.
Рис. 95. Механическая характеристика гистерезисного двигателя
Асинхронный момент Ма есть результат взаимодействия вращающегося магнитного поля с вихревыми токами, которые индуктируются этим полем в сердечнике ротора. Т к. ротор имеет большое активное сопротивление, то характеристика Ма=f(s) практически линейна и асинхронный гистерезисный момент максимален при s=1.Рис. 95.
ротор имеет большое активное сопротивление, то характеристика Ма=f(s) практически линейна и асинхронный гистерезисный момент максимален при s=1.Рис. 95.
,
где П2Н — потери на перемагничивание ротора при неподвижном роторе; Пвихр.Н — потери на вихревые токи при неподвижном роторе;
Двигатель используется в приводах небольшой мощности до 2000 Вт, частота f=50, 400 и 500 Гц.
Достоинства гистерезисного двигателя: простота, надежность, плавность входа в синхронизм, значительный пусковой момент, бесшумность, малый пусковой ток, сравнительно высокий КПД (до 60%).
Недостатки: дороговизна, склонность к качаниям при резких изменениях нагрузки, значительный нагрев ротора.
8.2.2. Шаговые двигатели
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи. Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота.
Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота.
Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
Шаговые двигатели различаются по числу фаз и типу магнитных системна ШД с активным ротором (с постоянными магнитами), ШД реактивного типа и индукторные.
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.
1. Шаговые двигатели с активным ротором. В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления. Ротор обычно представляет собой многополюсную звездочку из специального сплава. Есть варианты двух-, трех- и четырехфазных двигателей. Трехфазные двигатели имеют лучшие динамические характеристики и более равномерный ход. Управление ШД производится однополярными импульсами, поочередно подаваемыми на обмотки статора. Каждый импульс вызывает поворот ротора на единичный шаг.
Есть варианты двух-, трех- и четырехфазных двигателей. Трехфазные двигатели имеют лучшие динамические характеристики и более равномерный ход. Управление ШД производится однополярными импульсами, поочередно подаваемыми на обмотки статора. Каждый импульс вызывает поворот ротора на единичный шаг.
Рассмотрим принцип действия простейшего двухфазного двухполюсного ШД с активным ротором в виде постоянного магнита. При включении фазы под постоянное напряжение (условно положительной полярности) вектор намагничивающей силы НС статора совпадет с осью фазы А. В результате взаимодействия НС статора с полем постоянного магнита ротора возникнет синхронизирующий момент Мс = Mmaxsinq, где q — угол между осью ротора и вектором НС. Рис. 96.
Рис. 96. Принцип работы ШД
При отсутствии тормозного момента ротор займет положение, при котором его ось совпадет с осью фазы А (рис. 96, первый такт). Если теперь отключить фазу А и включить фазу В, вектор НС и ротор повернуться на 90о(второй такт). При включении фазы А на напряжение обратной полярности (третий такт) НС и ротор повернутся еще на 90о и т.д.
При включении фазы А на напряжение обратной полярности (третий такт) НС и ротор повернутся еще на 90о и т.д.
Если к ротору ШД приложен момент нагрузки, то при переключении фаз ротор будет отставать от вектора НС на некоторый угол qн = arcsin(Mн/Mmax).
В зависимости от типа электронного коммутатора управление ШД может быть:
- одноплярным или разнополярным;
- симметричным или несимметричным;
- потенциальным или импульсным.
При однополярном управлении напряжение каждой фазе изменяется от 0 до +U, а при разнополярном – от -U до +U.
Управление называется симметричным, если в каждом такте коммутации задействуется одинаковое число обмоток, и несимметричным – если разное.
При потенциальном управлении напряжение на обмотках изменяется только в моменты поступления управляющих импульсов. При отсутствии управляющего сигнала обмотка или группа обмоток находятся под напряжением, а положение ротора фиксируется полем обмоток. При импульсном управлении напряжение на обмотки подается только на время отработки шаг, после чего оно снимается и ротор удерживается в заданном положении либо реактивным моментом, либо внешним фиксирующим устройством.
При импульсном управлении напряжение на обмотки подается только на время отработки шаг, после чего оно снимается и ротор удерживается в заданном положении либо реактивным моментом, либо внешним фиксирующим устройством.
В двухполюсной машине число устойчивых положений в пределах одного оборота ротора n при разных способах коммутации может быть равно 1, 2, 4m, где m — число фаз: В многополюсных ШД число устойчивых положений возрастает пропорционально числу пар полюсов р.
Одним из определяющих параметров ШД является шаг ротора, т.е. угол поворота ротора, соответствующий одному управляющему импульсу (угол между двумя соседними устойчивыми состояниями): a = 360/pn.
ШД с активным ротором удается выполнить с шагом до 15о. Дальнейшее уменьшение шага ограничено технологическими трудностями создания ротора в виде постоянного магнита с числом пар полюсов больше шести.
2. Реактивные шаговые двигатели. Гораздо более мелкий шаг (до долей градуса) можно получить в реактивных редукторных ШД. Редукторные ШД выполняются с числом фаз m = 2 — 4. Они имеют ферромагнитный зубчатый ротор с равномерно расположенными zp зубцами и гребенчатые зоны статора, смещенные относительно друг друга на угол 2p/(mzp) рис.97. Число пазов статора и ротора, их геометрические размеры выбираются такими, чтобы обеспечить необходимую величину шага и синхронизирующего момента при заданном виде коммутации токов.
Реактивные шаговые двигатели. Гораздо более мелкий шаг (до долей градуса) можно получить в реактивных редукторных ШД. Редукторные ШД выполняются с числом фаз m = 2 — 4. Они имеют ферромагнитный зубчатый ротор с равномерно расположенными zp зубцами и гребенчатые зоны статора, смещенные относительно друг друга на угол 2p/(mzp) рис.97. Число пазов статора и ротора, их геометрические размеры выбираются такими, чтобы обеспечить необходимую величину шага и синхронизирующего момента при заданном виде коммутации токов.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и у обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя. Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора.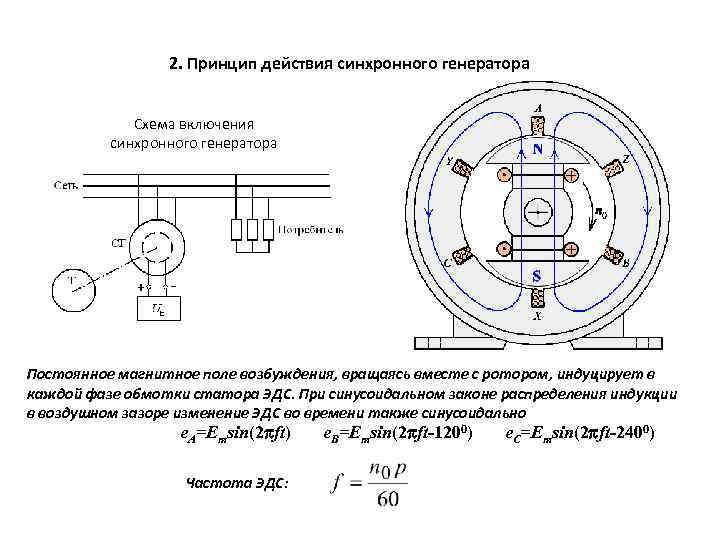 При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора. Величина углового шага редукторного шагового двигателя определится выражением: a = 360/Zp. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора. Величина углового шага редукторного шагового двигателя определится выражением: a = 360/Zp. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Индукторные (гибридные) шаговые двигатели. совмещают преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага).
Рис. 96. Конструкция реактивного ШД
Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
3. Режимы работы ШД.
1. Статический режим – это режим, при котором ротор фиксируется в одной из позиций, а по обмоткам статора протекает постоянный ток, создающий неподвижное в пространстве магнитное поле.
2. Квазистатический режим – это режим отработки единичных шагов, при котором переходные процессы от предыдущего такта коммутации полностью затухли и скорость ротора в начале следующего шага равна нулю.
3. Установившийся режим – это режим, соответствующий постоянной частоте следования управляющих импульсов. При частоте управляющих импульсов f1, меньшей частоты собственны колебаний двигателя f0, движение ротора носит колебательный характер, что увеличивает динамическую ошибку при отработке заданного перемещения. При частоте управляющих импульсов f1 = f0/k, где k – целое число, возникает явление электромеханического резонанса, которое при слабом демпфировании колебаний может привести к нарушению нормального движения ротора и выпадению его из синхронизма.
4. Переходный режим — это основной эксплуатационный режим работы ШД. Он включает в себя пуск, реверс, торможение, переход с одной управляющей частоты на другую. Основное требование к ШД в переходных режимах заключается в отсутствии потери шага, т.е. сохранение синхронизма при любом характере изменения управляющих импульсов.
 При f1 > f0 имеют место вынужденные колебания с частотой управляющих импульсов; амплитуда их монотонно уменьшается с увеличением частоты.
При f1 > f0 имеют место вынужденные колебания с частотой управляющих импульсов; амплитуда их монотонно уменьшается с увеличением частоты.Предельная механическая характеристика – это зависимость допустимого момента сопротивления от частоты управляющих импульсов в установившемся режиме работы (рис.97). С ростом частоты сказывается запаздывание в нарастании тока, обусловленное индуктивностью обмоток. При некоторой предельной частоте момент двигателя становится равным нулю. Предельную механическую характеристику рассматривают обычно при f>f0.
Рис. 97. Механические характеристики ШД
97. Механические характеристики ШД
Максимальная частота управляющих импульсов, при которой возможен пуск без потери шага, называется частотой приемистости fпр. Частота приземистости является важным показателем переходного режима ШД Частота приемистости растет с увеличением максимального синхронизирующего момента, уменьшением шага, снижением постоянной времени обмоток, нагрузки и момента инерции. Для современных ШД fпр = 100-1000 Гц.
Предельная динамическая характеристика – зависимость частоты приемистости от момента сопротивления и момента инерции нагрузки. Такие характеристики называются предельными динамическими характеристиками пуска. Существуют также предельные динамические характеристики реверса и торможения
8.3. Бесконтактные двигатели переменного тока
Бесконтактные двигатели постоянного тока состоят из трех элементов (рис. 98):
- двигателя с m-фазной обмоткой на статоре и возбужденным ротором обычно в виде постоянного магнита;
- датчика положения ротора (ДПР), выполненного в одном корпусе с двигателем и предназначенного для выработки сигналов управления моментами времени и последовательностью коммутации токов в обмотках статора;
- коммутатора, как правило, транзисторного, осуществляющего по сигналам ДПР коммутацию токов в обмотках статора.
Рис. 98. Состав бесконтактного двигателя постоянного тока
Принцип действия подобен ДПТ:: при включении транзисторов Т1 и Т2 по обмотке статора потечет ток i в указанном направлении. В статоре возбудится магнитное поле, появится движущий момент, ротор повернется таким образом, чтобы векторы Fc и Fp совместились. Когда векторы совместятся, сигнал с ДПР закроет Т1 и Т2 и откроет Т3 и Т4. Ток в обмотке статора поменяет направление, движущий момент заставит ротор вращаться дальше и повернуться на 180°.
Для плавного хода число обмоток обычно 3 и выше. В этой схеме транзисторы и коммутатор работают в ключевом режиме. Транзисторами управляют схемы формирования Фа, Фб, Фс. На эти схемы подаются управляющие импульсы с датчика положения ротора. ДПР имеет и статор и ротор. На статоре имеются полюса, на которых поочередно располагаются обмотки управления а, б, с и обмотки возбуждения (5-30 кГц). Ротор ДПР имеет сектор из магнита мягкого материала. При повороте этот сектор замыкает два соседних полюса и в соответствующей обмотке управления наводится ЭДС, включается соответствующая статорная обмотка и роторы двигателя и ДПР поворачиваются на 120°. Затем сектор замыкает два следующих полюса, в результате роторы поворачиваются еще на 120° и т.д.
Рис. 99. Схема бесконтактного двигателя постоянного тока.(а) и его механические характеристики (б)
На рис. 99 показаны схема и механические характеристики бесконтактного двигателя при разных индуктивностях обмоток статора L. Видно, что с увеличением L нелинейность характеристик увеличивается.
Частоту вращения бесконтактных двигателей можно регулировать в широких пределах путем изменения напряжения питания.
Однако на практике чаше применяется импульсный способ, сущность которого заключается в изменении не величины постоянно подводимого напряжения, а длительности питания двигателя номинальным напряжением.
Электродвигатели, их классификация
Электрический двигатель — электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую.
В зависимости от назначения, от предполагаемых режимов и условий работы, от типа питания и т. д., все электродвигатели можно классифицировать по нескольким параметрам: по принципу получения рабочего момента, по способу работы, по роду тока питания, по способу управления фазами, по типу возбуждения и т. д. Давайте же рассмотрим классификацию электродвигателей более подробно.
Возникновение вращающего момента
Вращающий момент в электродвигателях может быть получен одним из двух способов: по принципу магнитного гистерезиса либо чисто магнитоэлектрически. Гистерезисный двигатель получает вращающий момент посредством явления гистерезиса во время перемагничивания магнитно-твердого ротора, в то время как у магнитоэлектрического двигателя вращающий момент является результатом взаимодействия явных магнитных полюсов ротора и статора.
Магнитоэлектрические двигатели по праву составляют сегодня львиную долю всего обилия электродвигателей, применяемых в очень многих областях. Они подразделяются по роду питающего тока на:
- двигатели постоянного тока,
- двигатели переменного тока,
- универсальные двигатели.
В отличие от магнитоэлектрического двигателя, в гистерезисном двигателе допускается перемещение намагниченности ротора относительно его геометрических осей, и именно данная особенность не позволяет распространять на синхронный режим работы гистерезисного двигателя общие закономерности магнитоэлектрического преобразования.
Классификация электродвигателей
Двигатели постоянного тока
У двигателя, который питается постоянным током, за переключение фаз отвечает сам двигатель. Это значит, что хотя на электрическую машину и подается постоянный ток, тем не менее, благодаря действию внутренних механизмов устройства, магнитное поле оказывается движущимся и становится в состоянии поддерживать вращающий момент ротора (как будто в обмотке статора действует переменный ток).
Устройство и приницип работы электродвигателя постоянного тока: 1 — якорь, 2 — вал, 3 — коллекторные пластины, 4 — щеточный узел, 5 — магнитопровод якоря, 6 — магнитопровод индуктора, 7 — обмотки возбуждения, 8 — корпус индуктора, 9 — боковые крышки, 10 — вентилятор, 11 — лапы, 12 — подшипники.
Электродвигатель постоянного тока состоит из неподвижной части, называемой индуктором, и подвижной части, называемой якорем. В зависимости от исполнения, место обмотки возбуждения на индукторе могут располагаться постоянные магниты, что позволяет упростить конструкцию, но не позволяет регулировать магнитный поток двигателя, влияющий на его скорость.
По способу создания движущегося магнитного поля, двигатели постоянного тока подразделяются на:
- вентильные (бесколлекторные),
- коллекторные.
Бесколлекторные двигатели имеют в своей конструкции электронные инверторы, которые и осуществляют переключение фаз. Коллекторные же двигатели традиционно оснащены щеточно-коллекторными узлами, которые призваны чисто механически синхронизировать питание обмоток двигателя с вращением его движущихся частей.
Возбуждение коллекторных двигателей
Коллекторные двигатели по способу возбуждения бывают следующих видов: с независимым возбуждением от постоянных магнитов или от электромагнитов, либо с самовозбуждением. Двигатели с возбуждением от постоянных магнитов содержат магниты на роторе. Двигатели с самовозбуждением имеют на роторе специальную якорную обмотку, которая может быть включена параллельно, последовательно или смешано со специальной обмоткой возбуждения.
Двигатель пульсирующего тока
На двигатель постоянного тока похож двигатель пульсирующего тока. Отличие заключается в наличии шихтованных вставок на остове, а также дополнительных шихтованных полюсов. Кроме того, у двигателя пульсирующего тока имеется компенсационная обмотка. Применение такие двигатели находит в электровозах, где они обычно питается выпрямленным переменным током.
Двигатель переменного тока
Двигатели переменного тока, как ясно из названия, питаются током переменным. Бывают они синхронными и асинхронными.
У синхронных двигателей переменного тока магнитное поле статора движется с той же угловой скоростью, что и ротор, а у асинхронных всегда есть некое отставание (характеризующееся величиной скольжения s) — магнитное поле статора в своем движении как бы опережает ротор, который в свою очередь все время стремится его догнать.
Синхронные двигатели больших мощностей (мощностью в сотни киловатт) имеют на роторе обмотки возбуждения. Роторы менее мощных синхронных двигателей оснащены постоянными магнитами, которые и образуют полюса. Гистерезисные двигатели тоже в принципе относятся к синхронным.
Шаговые двигатели — это особая категория синхронных двигателей с высокой точностью управления скоростью вращения, вплоть до дискретного счета шагов.
Вентильные синхронные реактивные двигатели получают питание через инвертор.
Асинхронные двигатели переменного тока отличаются тем, что у них угловая скорость вращения ротора всегда меньше чем угловая скорость вращения магнитного поля статора. Асинхронные двигатели бывают однофазными (с пусковой обмоткой), двухфазными (к ним относится и конденсаторный двигатель), трехфазными и многофазными.
Конструкция трехфазного асинхронного электродвигателя с короткозамкнутым ротором
Асинхронный электродвигатель состоит и неподвижной (статора) части и подвижной (ротора) частей, которые удерживаются подшипниками 1 и 11, установленными в боковые крышки 3 и 9. Ротор состоит из вала 2, на котором закреплен магнитопровод 5 с обмоткой. Статор двигателя состоит из корпуса 7, к которому прикреплен магнитопровод 6. В пазы магнитопровода уложена трехфазная обмотка 8. Так же к корпусу крепится крышка клеммной коробки 4 и защитный кожух 12 крыльчатки 10.
Фазный ротор имеет трехфазную обмотку, выполненную по типу обмотки статора. Одни концы катушек соединены в нулевую точку («звезда»), а другие – подключены к контактным кольцам. На кольца наложены щетки, осуществляющие скользящий контакт с обмоткой ротора. При такой конструкции возможно подсоединение к обмотке ротора пускового или регулировочного реостата, позволяющего менять электрическое сопротивление в цепи ротора.
Асинхронный двигатель с частотным преобразователем для плавного регулирования скороcти вращения вала за счет изменения частоты и питающего напряжения:
Универсальные коллекторные двигатели
Универсальный коллекторнй двигатель может работать хоть от постоянного, хоть от переменного тока (50 Гц). Имеет последовательное возбуждение, используется в бытовых электроприборах, где требуется скорость вращения более высокая чем максимальные для обычных двигателей переменного тока 3000 об/мин. Как правило, мощность таких двигателей не превышает 200 Вт. Встречается тиристорное управление скоростью вращения универсального двигателя.
Усовершенствованная разновидность универсального двигателя — синхронный двигатель с датчиком положения ротора, где роль коллектора выполняет электронный инвертор.
Ранее ЭлектроВести писали, что компания Renault готовит полностью электрическую версию своего маленького хетчбэка – Renault Twingo ZE. Новинка появится уже в этом году.
По материалам: electrik.info.
В чем преимущество синхронных двигателей
Электрический двигатель — это устройство, обеспечивающее преобразование электрической энергии в механическую. Конструктивно агрегат состоит из статора (фиксирован) и ротора (вращается). Первый создает магнитный поток, а второй крутится под действием электродвижущей силы (ЭДС).
Отличие – кратко простыми словами
Если говорить кратко и простыми словами, синхронный и асинхронный двигателя отличаются конструкцией роторов. Внешне понять какой перед вами электродвигатель практически невозможно, за исключением наличия дополнительных ребер охлаждения у асинхронных электродвигателей.
В устройстве, работающем на синхронном принципе, на роторе предусмотрена обмотка с независимой подачей напряжения.
У асинхронного мотора ток на ротор не подается, а формируется с помощью магнитного статорного поля. При этом статоры обоих агрегатов идентичны по конструкции и несут аналогичную функцию — создание магнитного поля.
- Дополнительно в синхронном двигателе магнитные поля статора и ротора взаимодействуют друг с другом и имеют равную скорость.
- У асинхронных агрегатов в роторных пазах имеются короткозамкнутые пластинки из металла или контактные кольца, обеспечивающие разность магнитного поля роторного и статорного механизма на величину скольжения.
Несмотря на видимую простоту, разобраться с этим вопросом сразу вряд ли получится, поэтому рассмотрим вопрос более подробно. Поговорим об особенностях и отличиях асинхронных и синхронных машин.
Синхронный двигатель (СД)
Синхронный двигатель — агрегат с индивидуальной конструкцией ротора и индуктором с постоянными магнитами. Отличается улучшенными характеристиками мощности, момента и инерции. Имеет ряд особенностей конструкции и принципе действия.
Отличается улучшенными характеристиками мощности, момента и инерции. Имеет ряд особенностей конструкции и принципе действия.
Устройство
Конструктивно состоит из двух элементов: ротора (вращается) и статора (фиксированный механизм). Роторный узел находится во внутренней части статора, но бывают конструкции, когда ротор расположен поверх статора.
В состав ротора входят постоянные магниты, отличающиеся повышенной коэрцитивной силой.
Конструктивно СД делятся на два типа по полюсам:
- Неявно выраженные. Отличаются одинаковой индуктивностью по поперечной и продольной оси.
- Явно выраженные. Поперечная и продольная индуктивность имеют разные параметры.
- Конструктивно роторы бывают разными устройством и по конструкции.
- В частности, магниты бывают:
- Наружной установки.
- Встроенные.
Статор условно состоит из двух компонентов:
- Кожух.
- Сердечник с проводами.
Обмотка статорного механизма бывает двух видов:
- Распределенная. Ее отличие состоит в количестве пазов на полюс и фазу. Оно составляет от двух и более.
- Сосредоточенная. В ней количество пазов на полюс и фазу всего одно, а сами пазы распределяются равномерно по поверхности статорной части. Пара катушек, формирующих обмотку, могут соединяться в параллель или последовательно. Минус подобных обмоток состоит в невозможности влияния на линию ЭДС.
 Ее отличие состоит в количестве пазов на полюс и фазу. Оно составляет от двух и более.
Ее отличие состоит в количестве пазов на полюс и фазу. Оно составляет от двух и более.Форма электродвижущей силы электрического синхронного мотора бывает в виде:
- Трапеции. Характерна для устройств с явно выраженным полюсом.
- Синусоиды. Формируется за счет скоса наконечников на полюсах.
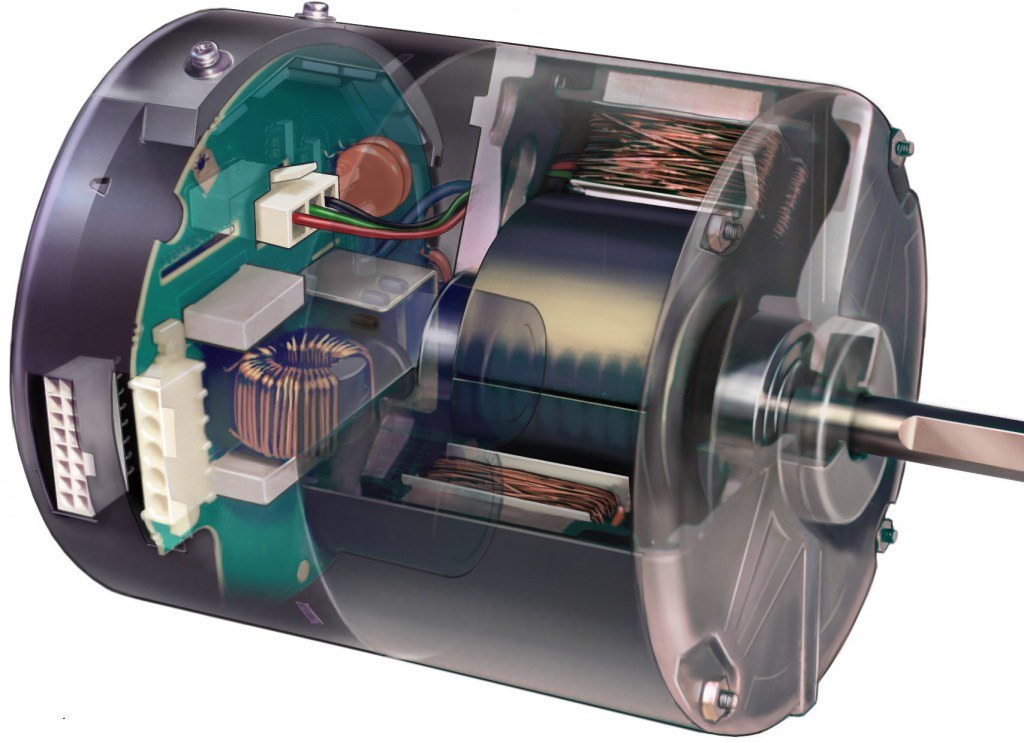
Если говорить в целом, синхронный мотор состоит из следующих элементов:
- узел с подшипниками;
- сердечник;
- втулка;
- магниты;
- якорь с обмоткой;
- втулка;
- «тарелка» из стали.
Принцип работы
Сначала к обмоткам возбуждения подводится постоянный ток. Он создает магнитное поле в роторной части. Статор устройства содержит обмотку для создания магнитного поля.
Статор устройства содержит обмотку для создания магнитного поля.
Как только на статорную обмотку подается ток переменной величины, по закону Ампера создается крутящий момент, и ротор начинает вращаться с частотой, равной частоте тока в статорном узле. При этом оба параметра идентичны, поэтому и двигатель носит название синхронный.
- Роторная ЭДС формируется, благодаря независимому источнику питания, что позволяет менять обороты и не привязываться к мощности подключенных потребителей.
- С учетом особенностей работы синхронный электродвигатель не может запуститься самостоятельно при подключении к трехфазному источнику тока.
- Электродвигатель синхронного типа имеет широкую сферу применения, благодаря постоянству частоты вращения.
- Эта особенность расширяет сферу его применения:
- энергетика: источники реактивной мощности для поддержания напряжения, сохранение устойчивости сети при аварийных просадках;
- машиностроение, к примеру, при изготовлении гильотинных ножниц с большими ударными нагрузками;
- прочие направления — вращение мощных компрессоров или вентиляторов, генераторы на электростанциях, обеспечение устойчивой работы насосного оборудования и т. д.
 д.
д.Как подключить электродвигатель 380В на 220В
Преимущества и недостатки
После рассмотрения конструктивных особенностей, принципа работы и сферы применения СД подведем итог по положительным / отрицательным особенностям.
Плюсы:
- Возможность работы при косинусе Фи равном единице (отношение полезной мощности к полной). Эта особенность улучшает косинус Фи сети. При работе с опережающим током синхронные машины генерируют реактивную мощность, которая поступает к асинхронным моторам и уменьшает потребление «реактива» от генераторов электрических станций.
- Высокий КПД, достигающий 97-98%.
- Повышенная надежность, объясняемая большим воздушным зазором.
- Доступность регулирования перегрузочных характеристик, благодаря изменению тока, подаваемого в ротор.
- Низкая чувствительность к изменению напряжения в сети.
Минусы:
- Более сложная конструкция и, соответственно, высокая стоимость изготовления.
- Трудности с пуском, ведь для этого нужные специальные устройства: возбудитель, выпрямитель.
- Потребность в источнике постоянного тока.
- Применение только для механизмов, которым не нужно менять частоту вращения.

Пример СД2-85/37-6У3, 500кВт, 1000об/мин, 6000В.
СД2-85/37-6У3, 500кВт, 1000об/мин, 6000В
Асинхронный двигатель (АД)
Асинхронный (индукционный) электродвигатель, имеющий разную частоту вращения магнитного поля в статоре и скорости ротора. В зависимости от типа и настройки может работать в двигательном или генераторном режиме, режиме ХХ или электромагнитного тормоза.
Конструктивные особенности
Конструктивно асинхронные механизмы трудно отличить от синхронных. Они также состоят из двух основных узлов: статора и ротора. При этом роторный узел может быть фазным или короткозамкнутым. Но небольшие конструктивные отличия все-таки имеются.
Рассмотрим, из чего состоит асинхронный двигатель:
- сердечник;
- вентилятор с корпусом;
- подшипник;
- коробка с клеммами;
- тройная обмотка;
- контактные кольца.
С учетом сказанного одним из главных отличий является отсутствие обмоток на якоре (исключением являются фазные АД). Вместо обмотки в роторе находятся стержни, закороченные между собой.
Принцип действия
В асинхронном двигателе магнитное поле создается, благодаря току в статорной обмотке, находящейся на специальных пазах. На роторе, как отмечалось выше, обмоток нет, а вместо них накоротко объединенные стержни. Такая особенность характерна для короткозамкнутого роторного механизма.
- Во втором типе ротора (фазном) на роторе предусмотрены обмотки, ток и сопротивление которых могут регулироваться реостатным узлом.
- Простыми словами, принцип действия можно разложить на несколько составляющих:
- При подаче напряжения в статоре создается магнитное поле.
- В роторе появляется ток, взаимодействующий с ЭДС статора.
- Роторный механизм вращается в том же направлении, но с отставанием (скольжением) размером от 1 до 8 процентов.

- Асинхронные электромоторы пользуются большим спросом в быту, благодаря простоте конструкции и надежности в эксплуатации.
- Они часто применяются в бытовой аппаратуре:
- стиральных машинках;
- вентиляторе;
- вытяжке;
- бетономешалках;
- газонокосилках и т. д.
Также применяются они и в производстве, где подключаются к 3-фазной сети.
К этой категории относятся следующие механизмы:
- компрессоры;
- вентиляция;
- насосы;
- задвижки автоматического типа;
- краны и лебедки;
- станки для обработки дерева и т. д.
Асинхронные машины применяются в электрическом транспорте и других сферах. Они нашли применение в башенных кранах, лифтах и т.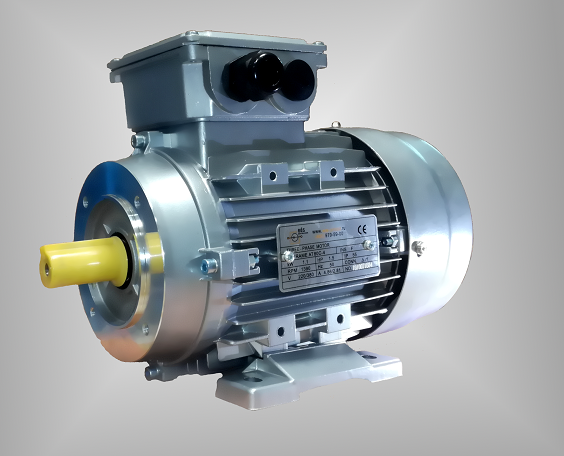 д.
д.
Пример Трехфазный АИР 315S2 660В 160кВт 3000об/мин.
Трехфазный АИР 315S2 660В 160кВт 3000об/мин
Преимущества и недостатки
Электродвигатель асинхронного типа имеет слабые и сильные места, о которых необходимо помнить.
Преимущества:
- Простая конструкция, которая обусловлена трехфазной схемой подключения и простым принципом действия.
- Более низкая стоимость, по сравнению с синхронным аналогом.
- Возможность прямого пуска.
- Низкое потребление энергии, что делает двигатель более экономичным.
- Высокая степень надежности, благодаря упрощенной конструкции.
- Универсальность и возможность применения в сферах, где нет необходимости в поддержке частоты вращения, или имеет место схема управления с обратной связью.
- Возможность применения при подключении к одной фазе.
- Успешный самозапуск группы АД в случае потери и последующей подачи на них напряжения.
- Минимальные расходы на эксплуатацию. Все, что требуется — периодически чистить механизма от пыли и протягивать контактные соединения. При соблюдении требований производителей менять подшипники можно с периодичностью раз в 15-20 лет.
 При соблюдении требований производителей менять подшипники можно с периодичностью раз в 15-20 лет.
При соблюдении требований производителей менять подшипники можно с периодичностью раз в 15-20 лет.Недостатки:
- Наличие эффекта скольжения, обеспечивающего отставание вращения ротора от частоты вращения поля внутри механизма.
- Потери на тепло. Асинхронные моторы имеют свойство перегреваться, особенно при большой нагрузке. По этой причине корпус изделия делают ребристым для увеличения площади охлаждения (у СД такое применяется не на всех моделях). Дополнительно может устанавливаться вентилятор для обдува поверхности.
- Напряжение только на 220 В и выше. Из-за конструктивных особенностей такие электродвигатели не производятся для рабочего напряжения меньше 220 В. В качестве замены часто применяются гидро- или пневмоприводы.
- Небольшой КПД в момент пуска и высокая реактивность. По этой причине мотор может перегреваться уже при пуске. Это ограничивает количество пусков в определенный временной промежуток.
- Синхронная частота вращения не может быть больше 3000 об/мин, ведь в ином случае требуется использование турбированного привода или повышающего редуктора.
- Трудности регулирования устройств, которые приводятся в движение «синхронниками».
- Повышенный пусковой ток — одна из главных проблем асинхронных моторов, имеющих мощность свыше 10 кВт. В момент пуска токовая нагрузка может превышать номинальную в шесть-восемь раз и длиться до 5-10 секунд. По этой причине для «асинхронников» не рекомендуется прямое подключение.
- При появлении КЗ возле шин с работающим двигателем появляется подпитка тока.
- Чувствительность к изменениям напряжения. При отклонении этого параметра более, чем на 5% показатели электродвигателя отклоняются от номинальных. В случае снижения напряжения уменьшается момент АД.
Сравнение синхронного и асинхронного двигателей
В завершение можно подвести итог, в чем главные отличия асинхронных (АД) и синхронных (СД) моторов.
Выделим базовые моменты:
- Ротору асинхронных моторов не требуется питание по току, а индукция на полюсах зависит от статорного магнитного поля.
- Обороты АД под нагрузкой отстают на 1-8% от скорости вращения поля статора. В СД количество оборотов одинаково.
- В «синхроннике» предусмотрена обмотка возбуждения.
- Конструктивно ротор СД представляет собой магнит: постоянный, электрический. У АД магнитное поле в роторном механизме наводится с помощью индукции.
- У синхронной машины нет пускового момента, поэтому для достижения синхронизации нужен асинхронный пуск.
- «Синхронники» применяются в случаях, когда необходимо обеспечить непрерывность производственного процесса и нет необходимости частого перезапуска. АД нужны там, где требуется большой пусковой момент и имеют место частые остановки.
- СД нуждается в дополнительном источнике тока.
- «Асинхронники» медленнее изнашиваются, ведь в их конструкции нет контактных колец со щетками.
- Для АД, как правило, характерно не круглое количество оборотов, а для СД — округленное.
Про реактивную мощность
Синхронные электродвигатели генерируют и одновременно потребляют реактивную мощность. Особенности и параметры «реактива» зависит от тока в возбуждающей обмотке. При полной нагрузке косинус Фи равен 1. В таком режим СД не потребляет «реактив» из сети, а ток в статорной обмотке минимален.
Особенности и параметры «реактива» зависит от тока в возбуждающей обмотке. При полной нагрузке косинус Фи равен 1. В таком режим СД не потребляет «реактив» из сети, а ток в статорной обмотке минимален.
Здесь важно понимать, что реактивная мощность ухудшает параметры энергосистемы. Большой параметр неактивных токов приводит к повышению расхода топлива, увеличению потерь и снижению напряжения.
Кроме того, «реактив» грузит линии передач электроэнергии, что ведет к необходимости увеличения сечения кабелей и проводов, а, соответственно, повышению капитальных расходов.
Сегодня одна из главных задач энергетиков — компенсация реактивной мощности. К основным ее потребителям относят АД, потребляющие 40% «реактива», электрические печи, преобразователи, ЛЭП и силовые трансформаторы.
Какой лучше
При сравнении асинхронного и синхронного электродвигателей трудно ответить, какой лучше. По конструкции и надежности выигрывает АД, который при умеренной нагрузке имеет более продолжительный срок службы. У СД щетки быстро изнашиваются, что требует их замены.
В остальном это два схожих по конструкции, но отличающихся по принципу действия механизма, имеющих индивидуальные сферы применения.
Синхронные двигатели с постоянными магнитами
В статье мы рассмотрим, что представляют собой синхронные двигатели с использованием постоянных магнитов. Изучим их особенности и принцип работы в различных условиях. Также разберем, как и с помощью чего может выполняться запуск синхронного двигателя.
Современное производство комплектуется большим количеством разнообразных электродвигателей.
Наиболее распространенной разновидностью принято считать асинхронные модели, постепенно вытесняющие остальные подвиды.
Однако есть тип моторов, которые все еще активно применяются и не собираются уступать асинхронникам. Это синхронные двигатели с возбуждением от постоянных магнитов. О них и пойдет речь в данной статье.
Это синхронные двигатели с возбуждением от постоянных магнитов. О них и пойдет речь в данной статье.
Устройство агрегата
В основе данной разновидности двигателя лежит стандартное сочетание – подвижный ротор и неподвижный статор. В классическом исполнении роторная часть располагается внутри статорной, однако есть модели и с обратным расположением. Они называются электродвигателями обращенного типа.
Роторная часть
В обсуждаемом типе моторов вращающийся элемент собирается на основе постоянных магнитов. Для магнитной части применяют материалы с высокой коэрцитивной силой. Конструктивно ротор в синхронном двигателе может быть 2 типов:
- Явнополюсный, с различными показателями поперечной и продольной индуктивности. Обмотки в таком исполнении располагаются на полюсах сердечника. Каждый из них становится отдельным элементом, со своим сердечником, катушкой, наконечником. Фиксацию производят на ободе, монтируемом на вал.
- С неявно выраженными полюсами, где показатель индуктивности по обеим осям имеет одну величину. Неявнополюсная модель изготавливается в цилиндрической форме с продольными пазами. В них производится укладка обмотки возбуждения. Цилиндр может быть един с валом в кованом факторе или же напрессованной на вал деталью. Во избежание повреждения провода в процессе работы, концы ротора прикрывают немагнитной сталью. Применяется на высоких оборотах под действием значительной центробежной силы. Может иметь 2 или 4 полюса.
 Неявнополюсная модель изготавливается в цилиндрической форме с продольными пазами. В них производится укладка обмотки возбуждения. Цилиндр может быть един с валом в кованом факторе или же напрессованной на вал деталью. Во избежание повреждения провода в процессе работы, концы ротора прикрывают немагнитной сталью. Применяется на высоких оборотах под действием значительной центробежной силы. Может иметь 2 или 4 полюса.
Неявнополюсная модель изготавливается в цилиндрической форме с продольными пазами. В них производится укладка обмотки возбуждения. Цилиндр может быть един с валом в кованом факторе или же напрессованной на вал деталью. Во избежание повреждения провода в процессе работы, концы ротора прикрывают немагнитной сталью. Применяется на высоких оборотах под действием значительной центробежной силы. Может иметь 2 или 4 полюса.Магниты в конструкции могут быть установлены двумя способами – поверхностным и встраиванием.
Статор
Данный элемент является неподвижным и состоит из корпусной части и сердечника с обмоткой. Чаще всего встречаются обмотки двухфазного и трехфазного типа. Сердечник собирается из отдельных листов металла (электротехнической стали), изолированных между собой. Пазы сердечника предназначены для прокладки обмоточного провода. Общая конструкция статора синхронного мотора схожа с асинхронными моделями.
Конструктивно статорная часть может иметь несколько исполнений. Она может производиться цельной или сегментарной, сборной.
Она может производиться цельной или сегментарной, сборной.
В случае с большими корпусами, их делают разъемными, разделяющимися вдоль оси ротора на 2 половины.
Это значительно упрощает любые операции с агрегатом – транспортировку, ремонтные работы, установку и обслуживание. При малых габаритах корпус выполняется цельным, а в него запрессовывается статор.
Принцип работы
Движение роторной части основано на взаимодействии магнитного потока, который генерируют обмотки статорного элемента, с постоянным потоком. Для формирования магнитного поля ротора может использоваться обмотка с подачей постоянного напряжения, или же магниты. В таком случае оборот статорного поля происходит за период, а ротор движется вслед за ним в силу постоянного магнитного потока. Движение производится синхронно, управляемое сменой амплитуды ЭДС в обмотках.
Статорные обмотки могут быть разной сложности исполнения, однако функция у них неизменна – они создают направленное в нужную сторону электромагнитное поле.
При взаимодействии с постоянным полем роторных магнитов, оно создает крутящий момент, вследствие чего роторная часть начинает вращаться.
Происходит сцепление полюсов с полем статора, из-за чего при подключении напрямую в сеть переменного трехфазного тока вращение не начинается, необходимы дополнительные управляющие узлы.
Управление СДПМ
В качестве управляющей системы синхронного двигателя с ротором, оснащенным постоянными магнитами, может использоваться частотный преобразователь или сервопривод пуска. Способы контроля запуска при этом могут быть разнообразны, выбор зависит от поставленных задач. Управление бывает синусоидальным и трапецеидальным. Эти 2 вида имеют свои подвиды, с собственными преимуществами и недостатками:
- Скалярное. Одна из наиболее простых схем. При этом она чувствительна к смене нагрузки, что приводит к потере управляемости.
- Векторное полеориентированное. Может быть реализовано с датчиком положения и без него. Достоинства его в обеспечении плавности и точности установки положения ротора. Делает работу двигателя более стабильной, позволяет производить регулировку. Минусом таких конструкций является необходимость в мощном микроконтроллере управления.
- Векторное прямое. Достаточно простая схема, имеющая хорошие динамические показатели. Позволяет производить регулировку в широком диапазоне. Недостаток в высоких пульсациях тока и момента.
- Без обратной связи. Как и все трапецеидальные способы управления, обладает простой схемой. Этот момент создает и негативные моменты – управляемость может быть потеряна при смене сопротивления (нагрузки на вал).
- С обратной связью на датчиках Холла. Удобная и несложная система. Минус в необходимости приобретения и установки датчиков. Также возможна пульсация момента.
- Обратная связь без датчиков. Схема работает и применяется во многих двигателях, однако требует мощной управляющей системы. Также неэффективна на низких оборотах и может создавать пульсации момента.
 Делает работу двигателя более стабильной, позволяет производить регулировку. Минусом таких конструкций является необходимость в мощном микроконтроллере управления.
Делает работу двигателя более стабильной, позволяет производить регулировку. Минусом таких конструкций является необходимость в мощном микроконтроллере управления.Простейшие конструкции мотора (кулер компьютера) комплектуются датчиками Холла, не имеющими высоких требований. Если же необходимо формирование системы для достижения максимальных характеристик, чаще всего используют полеориентированные схемы.
Если же необходимо формирование системы для достижения максимальных характеристик, чаще всего используют полеориентированные схемы.
Полеориентированное управление
Способ позволяет осуществлять плавное, точное и независимое регулирование скорости и момента бесщеточного мотора. Чтобы система исправно работала, нужно определить точное положение ротора. Выполняется это одним из 2 доступных способов – по датчикам положения или без них.
В конструкции синхронного двигателя могут использоваться такие типы датчиков:
- индуктивные, включая синусно-косинусные вращающиеся трансформаторы, редуктосин, индуктосин и подобные;
- оптические;
- магнитные.
Основным элементом последнего типа являются магниторезистивные датчики, способные точно определить положение ротора в магнитном поле.
Если остановиться на бездатчиковом способе, он основан на векторном управлении. Данная технология начала разрабатываться еще в 1970-х годах. Первые методы основывались на свойстве электромотора генерировать обратную ЭДС при движении.
Именно она и содержит в себе необходимую информацию, по которой можно произвести расчет положения роторной части двигателя. Используется стационарная система координат. Однако данная методика имеет большой минус – ее нельзя применять при неподвижном роторе и на низких оборотах.
Причина в отсутствии или минимальных показателях обратной ЭДС, теряющихся в общем шуме.
Системы управления могут использовать 2 способа запуска двигателя:
- Скалярный. Пуск выполняется по заранее определенной характеристике зависимости напряжения от частоты. Метод действенный, однако, вводит свои ограничения на возможности управляющей системы и общие параметры электропривода.
- Высокочастотный сигнал. Используется метод наложения. Эффективен только с агрегатами, имеющими явновыраженные полюса.
Полнодиапазонное управление скоростью синхронного мотора без датчиков определения положения в современном производстве применяется только с явновыраженными полюсами ротора.
Отличие от асинхронного двигателя
Главным различием между асинхронными и синхронными двигателями заключается в способе преобразования электрической энергии в механическую:
- синхронные модели вращаются аналогично электромагнитному полю сети;
- асинхронные агрегаты работают за счет наведенной статорным полем в роторе ЭДС, производящей взаимоиндукцию и приводящей к вращению.
Особенность работы несинхронных полей выражается в особом параметре – скольжении, которое характеризует разницу в частоте статорного и роторного полей.
Асинхронники при своей популярности обладают рядом недостатков:
- чувствительность к перегрузкам;
- высокие пусковые токи;
- нестабильность крутящего момента при изменении нагрузки.
Все эти факторы отсутствуют у линейных синхронных двигателей, будь то с обмоткой возбуждения или постоянными магнитами.
Область применения СДПМ
Сфера использования синхронного двигателя с постоянными магнитами достаточно обширна, и зависит во многом от мощности агрегата. Мощные конструкции в режиме генератора применяются на бортах самолетов в качестве системы питания. При этом они могут выдавать до нескольких десятков киловатт. При меньшей мощности двигателя его широко применяют в конструкции автомобилей, тракторов, самолетов. Причина такой популярности в высокой надежности и стабильности. Также используются СДПМ и в мелкой бытовой технике.
Мощные конструкции в режиме генератора применяются на бортах самолетов в качестве системы питания. При этом они могут выдавать до нескольких десятков киловатт. При меньшей мощности двигателя его широко применяют в конструкции автомобилей, тракторов, самолетов. Причина такой популярности в высокой надежности и стабильности. Также используются СДПМ и в мелкой бытовой технике.
Способы запуска маломощных моделей
Конструкции малой мощности на основании постоянных магнитов могут запускаться в работу двумя способами – самозапуск и асинхронный пуск. Каждый метод имеет свои особенности.
Самозапускающиеся СДПМ
Данный метод используется с системами, имеющими малую номинальную мощность, не превышающую несколько ватт. Чтобы упростить запуск, мотор выполняется в многополюсном факторе (количество полюсов превышает 8). Питание подается от однофазной сети с промышленной частотой.
Пуск осуществляется за счет синхронного момента при взаимодействии пульсирующего поля с постоянными магнитами ротора.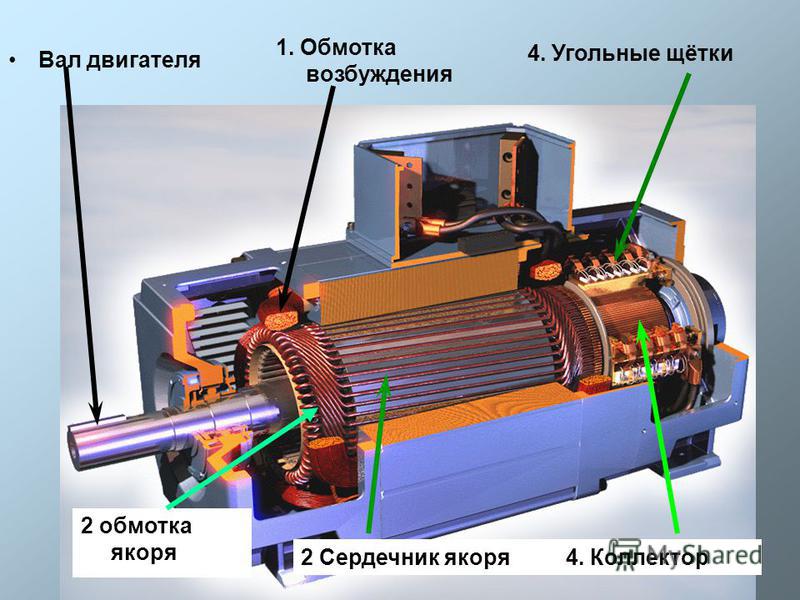 Для контроля и направленности запуска используют специальные механические направляющие механизмы, позволяющие производить вращение только в одну сторону. Во время синхронизации ротор отсоединяется от вала.
Для контроля и направленности запуска используют специальные механические направляющие механизмы, позволяющие производить вращение только в одну сторону. Во время синхронизации ротор отсоединяется от вала.
Асинхронный запуск
Модели данного типа изготавливают с радиальным расположением постоянного магнита и пусковой обмотки короткозамкнутого вида. Также возможно аксиальное расположение данных элементов. Конструкция статора моделей аналогична системам с электромагнитным возбуждением.
При радиальном расположении короткозамкнутая обмотка располагается в пазах полюсных наконечников магнита. Чтобы получить допустимые потоки рассеивания, наконечники соседних полюсов разделены немагнитными промежутками. Для повышения прочности эти элементы могут объединяться в единый сердечник.
Аксиальное расположение подразумевает, что активная длина частично занята постоянным магнитом. Другая часть отведена под шихтованный магнитопровод с обмоткой короткозамкнутого типа. При этом обе части располагаются на одном валу.
В процессе запуска на ротор одновременно воздействует положительный асинхронный момент (взаимодействие вращающегося поля с индуктированными токами обмотки), а также отрицательная величина, обусловленная взаимодействием постоянных магнитов с полями в статорной обмотке.
Достоинства и недостатки синхронных двигателей
Пуск синхронного двигателя
Синхронный двигатель не имеет начального пускового момента.
Если его подключить к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока электромагнитный момент будет дважды изменять свое направление, т.е. средний момент за период равняется нулю.
При этих условиях двигатель не сможет прийти во вращение, так как его ротор, обладающий определенной инерцией, не может быть в течение одного полупериода разогнан до синхронной частоты вращения.
Следовательно, для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронный.
В настоящее время чаще всего применяют следующие способы пуска:
1. Асинхронный пуск.
При этом способе синхронный двигатель пускают как асинхронный, для чего его снабжают специальной короткозамкнутой пусковой обмоткой, выполненной по типу «беличья клетка».
Чтобы увеличить сопротивление стержней, клетку изготавливают из латуни.
После разгона ротора до частоты вращения, близкой к синхронной, на обмотку возбуждения подается напряжение и постоянный ток, проходящий по ней, создает синхронизирующий момент, который втягивает ротор в синхронизм.
2. Пуск при помощи вспомогательного двигателя.
Ротор возбужденного двигателя приводится во вращение до синхронной скорости и с помощью синхронизирующего устройства подключается к сети. После этого вспомогательный двигатель отключают.
В качестве пускового двигателя обычно используют асинхронный двигатель с числом полюсов на два меньше, чем у синхронного.
Недостатком данного способа является невозможность пуска двигателя под нагрузкой, так как нерационально иметь пусковой двигатель большой мощности.

3. Частотный пуск.
При частотном пуске синхронного двигателя частота питающего напряжения плавно изменяется от нуля до номинальной. При этом ротор вращается синхронно с магнитным полем статора.
Недостатками частотного пуска являются высокая стоимость преобразователя частоты, а также необходимость реализации сложных законов регулирования исходного напряжения и частоты в процессе разгона двигателя. Частотный пуск синхронных двигателей применяется в приводах специальных установок.
Синхронные двигатели имеют следующие достоинства:
1. Возможность работы при cos φ=1; это приводит к улучшению cos φ сети, а также к сокращению размеров двигателя, так как его ток меньше тока асинхронного двигателя той же мощности. При работе с опережающим током синхронные двигатели служат генераторами реактивной мощности, поступающей в асинхронные двигатели, что снижает потребление этой мощности от генераторов электростанций.
2. Меньшую чувствительность к колебаниям напряжения, так как их максимальный момент пропорционален напряжению в первой степени, а не квадрату напряжения.

3. Строгое постоянство частоты вращения независимо от механической нагрузки на валу.
Недостатки синхронных двигателей:
1. Сложность конструкции.
2. Сравнительная сложность пуска в ход.
3. Трудности с регулированием частоты вращения, которое возможно только путем изменения частоты питающего напряжения.
Указанные недостатки синхронных двигателей делают их менее выгодными, чем асинхронные двигатели, при ограниченных мощностях до 100кВт.
Однако при более высоких мощностях, когда особенно важно иметь высокий cos φ и уменьшенные габаритные размеры машины, синхронные двигатели предпочтительнее асинхронных.
Достоинства и недостатки синхронных двигателей
Синхронный электродвигатель имеет сложнее структуру, чем асинхронный, но обладает некоторыми достоинствами.
Главным положительным качеством данных агрегатов является способность поддерживать оптимальный режим реактивной энергии. Из-за автоматического регулирования силы тока двигателя, он работает, не употребляя, не давая реактивную энергию, значение коэффициента мощности равняется 1. Если нужна реактивная энергия, она будет производиться синхронным мотором.
Из-за автоматического регулирования силы тока двигателя, он работает, не употребляя, не давая реактивную энергию, значение коэффициента мощности равняется 1. Если нужна реактивная энергия, она будет производиться синхронным мотором.
Данным двигателям не страшны перебои в сети, которой равен их максимальный момент. А значение критического момента равно квадрату напряжения.
Агрегат выдерживает большую перегрузку, которую можно еще увеличить автоматически повышением тока при необходимости непродолжительной нагрузки на вал. Он имеет постоянную скорость вращения независимо от нагрузки.
Трехфазный синхронный двигатель дороже обычного асинхронного из-за сложного механизма и особого устройства.
Характеристика электрических сетей
Еще недостатком оказывается надобность в постоянном источнике энергии, функции которого выполняет выпрямитель или специализированный возбудитель.
Устройство электродвигателя
Синхронный мотор имеет две основные части — статор и ротор. Неподвижная часть называется статором, а подвижный элемент ротором.
Неподвижная часть называется статором, а подвижный элемент ротором.
Однофазный двигатель с короткозамкнутым ротором, расположенным в статоре или снаружи в двигателях обращенного вида. В основе ротора — постоянные магниты. Материал магнитов имеет высокую коэрцитивную силу. Полюсы ротора могут быть явно и неявно выраженными. Синхронный двигатель с короткозамкнутым ротором бывает с магнитами на поверхности или с уже встроенными.
Статор представлен корпусом и сердечником, состоящим из двухфазных и трехфазных обмоток. Обмотка бывает распределенная и сосредоточенная. У распределенной насчитываются пазы полюса и фазы Q= 2,3.
У сосредоточенной обмотки пазы полюса и фазы Q=1. Пазы размещены на одинаковом расстоянии на окружности неподвижной части двигателя. Катушки статора соединяются последовательно или параллельно. Такие обмотки не могут влиять на форму кривой ЭДС. Электродвижущая сила имеет трапецеидальную и синусоидальную форму.
У явно выраженного полюса форма ротора и наводимая электродвижущая сила проводника является трапециевидной формы (а). При необходимости создания синусоидальной ЭДС, полюсные наконечники приобретают другую форму, где величина кривой распределения индукции близкая синусоидальной.
При необходимости создания синусоидальной ЭДС, полюсные наконечники приобретают другую форму, где величина кривой распределения индукции близкая синусоидальной.
Осуществление возможно благодаря наличию скосов на наконечнике полюса ротора.
Ротор синхронного двигателя переменного тока: а — явно выраженный полюс, 6 — неявно выраженный полюс.
Неявно выраженные полюса обладают равной индуктивностью продольных и поперечных осей, а явно выраженные полюса имеют одинаковую величину поперечной и продольной индуктивности (б).
Синхронный двигатель — достоинства и недостатки
Наибольшее распространение такая машина как синхронный двигатель получила в промышленности, где есть электроприводы, работающие на постоянных скоростях. Например, компрессоры с мощными двигателями, приводы насосов. Также синхронный двигатель является неотъемлемой частью и многих бытовых приборов, например, он есть в часах.
Принцип действия этой машины достаточно прост.
Взаимодействие вращающегося магнитного поля якоря, создаваемого переменным током, и магнитных полей на полюсах индуктора, создаваемых постоянным током, и лежит в основе принципа работы такого электрического устройства как синхронный двигатель.
Обычно индуктор расположен на роторе, а якорь – на статоре. Мощные двигатели в качестве полюсов используют электромагниты. Но есть и маломощный тип — синхронный двигатель с постоянными магнитами. Главное отличие синхронных машин от асинхронных — конструкция статора и ротора.
Для разгона двигателя до уровня номинальной скорости часто используют асинхронный режим. В этом режиме обмотка индуктора накоротко замкнута. После того как двигатель выходит на номинальную скорость, выпрямитель питает постоянным током индуктор. Только в номинальной скорости синхронный двигатель может самостоятельно работать.
https://www.youtube.com/watch?v=LLwcpfUjl44\u0026t=15s
Такой двигатель имеет массу достоинств. Он на порядок сложнее асинхронной машины, однако это компенсируется рядом преимуществ. Один из главных плюсов — его возможность работать без потребления или отдачи реактивной энергии. При этом коэффициент мощности двигателя будет равен единице.
При таких условиях синхронный двигатель переменного тока будет нагружать сеть исключительно активной составляющей. Побочным эффектом будет уменьшение габаритов двигателя (у асинхронного двигателя обмотка статора рассчитывается и на активный, и на реактивный токи).
Побочным эффектом будет уменьшение габаритов двигателя (у асинхронного двигателя обмотка статора рассчитывается и на активный, и на реактивный токи).
Однако синхронный двигатель может вырабатывать и реактивную энергию, работая в режиме перевозбуждения.
Синхронный электродвигатель гораздо менее чувствителен к скачкам и перепадам напряжения в сети. Также такие электрические машины имеют более высокую устойчивость к перегрузкам.
За счет повышения токов возбуждения можно увеличить перегрузочную способность двигателя.
Плюсом работы с синхронной машиной является также и постоянная номинальная скорость вращения при любой нагрузке (кроме перегрузок).
Обязанности слесаря КИПиА
Несомненно, у такой машины как синхронный двигатель есть и свои слабые места. Они связаны с повышенными затратами и сложной эксплуатацией. Основной проблемой является процесс возбуждения электродвигателя и введения его в синхронизм.
В настоящее время нашли распространение тиристорные возбудители, которые имеют гораздо более высокий коэффициент полезного действия, чем электромашинные возбудители.
 Однако их стоимость существенно выше.
Однако их стоимость существенно выше.С помощью тиристорного коммутатора можно решить многие вопросы: оптимальное регулирование токов возбуждения, поддержка постоянного значения косинуса фи, контроль над напряжением на шинах, регулирование токов статора и ротора в аварийных режимах и при перегрузках.
Принцип действия
Принцип действия электрической машины переменного тока: 1 — статор, 2 — ротор.
У однофазного двигателя отсутствует пусковой момент.
При подключении обмотки якоря к сети переменного тока, ротор неподвижен, в обмотку возбуждения поступает постоянный ток, за время одного изменения напряжения, два раза происходит смена направления электромагнитного момента. Значение среднего момента равняется нулю. Ротор разгоняется посредством внешнего момента до вращающейся частоты, которая приближается к синхронности.
Из-за высокого значения коэффициента мощности обеспечивается снижение потребления электричества, уменьшаются потери. В сравнении с асинхронным механизмом с такой же мощностью, синхронный двигатель имеет КПД выше. Так как крутящийся момент аналогичен напряжению сети. Даже снижение напряжения не влияет на нагрузочную способность. Что свидетельствует о надежности механизма.
Так как крутящийся момент аналогичен напряжению сети. Даже снижение напряжения не влияет на нагрузочную способность. Что свидетельствует о надежности механизма.
Тип подключения делится на однофазный и трехфазный. Синхронные агрегаты чаще бывают трехфазными.
При положении проводников трехфазного двигателя в определенной геометрической позиции появляется электромагнитное поле, которое вращается с одновременной скоростью.
При имении магнита во вращающемся поле, они замыкают, крутятся параллельно. Двигатель можно назвать нерегулируемым, так как его скорость постоянная.
Виды и характеристики двигателей синхронного типа
По числу обмоток, используемых для создания вращающегося поля статора, все известные модели синхронных двигателей делятся на:
- однофазные;
- трехфазные устройства.
Последние предназначаются для работы в условиях повышенных напряжений и нагрузок, что характерно для условий промышленного производства. Их полезная мощность порой достигает сотен кВт.
Их полезная мощность порой достигает сотен кВт.
В отличие от них однофазные электродвигатели могут подключаться к бытовым электрическим сетям переменного тока частотой 50 Гц и напряжением 220 Вольт. Как правило, эти устройства имеют мощность в пределах от 5 Вт до 10 кВт.
По рабочей эффективности они существенно уступают своим трехфазным аналогам. Однофазная схема включения заметно снижает КПД двигателя и величину его пускового момента. Вместе с тем агрегаты этого типа способны выдерживать большие перегрузки на валу.
Пуск электродвигателя
- Существует два способа пуска синхронной машины.
- Схема пуска на основе глухо подключенного возбудителя, применима для статистического момента нагрузки менее 0,4, без падений напряжения.
- Асинхронный пуск с помощью трансформатора
В обмотке возбуждения замыкается сопротивление разряда, избегая тем самым перебои возбуждения обмотки на впуске, потому как на небольшой скорости вращения ротора возникают перенапряжения.
Если скорость приближается к синхронной, реагирует контактор, а обмотка возбуждения переключается из разрядного сопротивления на якорь возбудителя.
- Применение тиристорного возбудителя
Амперметры
Возбуждение, осуществляемое при помощи электромагнитного реле
Пуск с тиристорным возбудителем более надежный, обладает высоким КПД. Легче становится управление возбуждением, напряжение шин, остановка в аварийном режиме. Во многих моделях электродвигателей установлены тиристорные возбудители. Подача возбуждения работает автоматически функцией скорости и тока.
Схема запуска двигателя и его регулировка
У синхронных двигателей отсутствует начальный пусковой момент. При подключении якорной обмотки к источнику переменного тока, электромагнитный момент дважды изменить свое направление за один период изменения тока. Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.
Таким образом, величина среднего момента в течение одного периода будет иметь нулевое значение. Чтобы увидеть, как работает синхронный двигатель при пуске, нужно выполнить разгон его ротора под действием внешнего момента до вращения с частотой, приближенной к синхронной.
Чтобы увидеть, как работает синхронный двигатель при пуске, нужно выполнить разгон его ротора под действием внешнего момента до вращения с частотой, приближенной к синхронной.
Сам запуск агрегата может производиться разными способами:
- В первом случае используется схема асинхронного включения, основой которой служит глухо подключенный возбудитель. Данный способ применяется при статическом моменте нагрузки ниже 0,4, когда отсутствует падение напряжения. Сопротивление разряда замыкается в обмотке возбуждения, за счет чего исключаются перебои с возбуждением обмотки во время впуска, поскольку незначительная скорость вращения ротора приводит к перенапряжению. Когда скорость становится близкой к синхронной, контактор реагирует на это изменение, в результате происходит переключение обмотки возбуждения из разрядного сопротивления непосредственно на якорь возбудителя.
- Во втором варианте пуска используется тиристорный возбудитель. Этот способ считается более надежным из-за высокого КПД. Управление возбуждением значительно облегчается. Подача возбуждение осуществляется автоматически с помощью электромагнитного реле.
 Управление возбуждением значительно облегчается. Подача возбуждение осуществляется автоматически с помощью электромагнитного реле.
Управление возбуждением значительно облегчается. Подача возбуждение осуществляется автоматически с помощью электромагнитного реле.Синхронный компенсатор
Упрощенная конструкция для холостого хода называется компенсатором.
Потребление электричества, помимо активной мощности, нуждается в реактивной мощности. Генератор вырабатывает реактивную мощность с минимальными затратами.
Переход реактивной мощности генератора связан с потерями на линии передач. Поэтому применение компенсаторов является обоснованным экономически.
При возбуждении синхронные двигатели не используют напряжение сети, а при перевозбуждении отдают реактивную мощность.
Синхронный электродвигатель применяется в сети переменного и постоянного тока, обеспечивая высокую надежность работы. Этот двигатель улучшит коэффициент мощности предприятия.
Синхронные электродвигатели 4СДМ, СДКП2, СДК2 г. Москва
Оставить заявку
ПОСТУПЛЕНИЕ НА СКЛАД
* Насос СДВ2700/26,5 1 шт
* Насос НПС120/65-750 3 шт.
* Насос НПС65/35-500С1а на раме 3 шт.
* Насос НПС200/700С1а на раме 6 шт.
* Насос НК65/35-125СГ на плите 2шт.
* Насос НК65/35-240СГ на плите 3шт.
* Насос ЦНС180-1050 3ТМ
* Насос ПЭ150-53 с эл/дв 4АЗМ500
подробнее
Синхронные электродвигатели 4СДМ
Синхронные электродвигатели 4СДМ предназначены для привода механизмов, не требующих регулирования частоты вращения (шаровые и стержневые мельницы, насосы и т.д.).
Режим работы продолжительный S1 от сети переменного тока частотой 50Гц.
Вид климатического исполнения: УХЛ4 и О4.
Конструктивное исполнение по способу монтажа: IM 7311.
Степень защиты: корпуса и коробки выводов — IP 11.
Способ охлаждения: ICA01.
Структура условного обозначения :
4 | порядковый номер серии |
СДМ | синхронный двигатель мельничный |
1250 | габарит (высота оси вращения, мм) |
K, КА | условная длина сердечника статора |
24, 32 | число полюсов |
6, 10 | условное обозначение величины напряжения |
Типоразмер | Мощность, кВт | Напря- жение, В | Частота вращения, об/мин | КПД, % | Масса, кг |
4СДМ-1250К 32-6 | 400 | 6 000 | 187,5 | 93,1 | 7800 |
4СДМ-1250К 32-6 | 225 | 7800 | |||
4СДМ-1250КА 24-6 | 500 | 250 | 94,3 | 7100 | |
4СДМ-1250К 24-10 | 10 000 | 93,3 | 7816 | ||
4СДМ-1250К 24-6 | 630 | 6 000 | 94,5 | 7600 |
Синхронные электродвигатели СДКП2
Синхронные электродвигатели СДКП2 предназначены для привода поршневых компрессоров. Режим работы продолжительный S1 от сети переменного тока частотой 50 Гц.
Режим работы продолжительный S1 от сети переменного тока частотой 50 Гц.
Исполнение по взрывозащите: 1ExpIIT5.
Вид климатического исполнения: УХЛ4.
Конструктивное исполнение по способу монтажа: электродвигателей 800 и 1000 кВт — IM 5710; электродвигателей 1250 и 1600 кВт — IM 7125.
Степень защиты: двигателя — IP 44; коробки выводов — IP 55.
Способ охлаждения: ICW37A81.
Структура условного обозначения:
СДК | синхронный двигатель компрессорный |
П | взрывозащищенный с видом взрывозащиты «заполнение или продувка оболочки под избыточным давлением» |
2 | обозначение серии |
18 | условное обозначение габарита |
26, 34, 41, 51 | длина сердечника статора, см |
16 | число полюсов |
Ф | фланцевое исполнение конца вала |
Типоразмер | Мощ- ность, кВт | Напряже- ние, В | Частота вращения, об/мин | КПД, % | Масса, кг |
СДКП2 — 18 — 26-16 | 800 | 6 000 | 375 | 93,8 | 8 000 |
СДКП2 — 18 — 34-16 | 1000 | 94,6 | 9 200 | ||
СДКП2 — 18 — 41-16 Ф | 1250 | 94,8 | 11 800 | ||
СДКП2 — 18 — 51-16 Ф | 1600 | 95,5 | 14 100 |
Синхронные электродвигатели СДК2
Синхронные электродвигатели СДК2 предназначен для привода механизмов, не требующих регулирования частоты вращения (компрессоры, вентиляторы и др. ).
).
Режим работы: продолжительный S1.
Вид климатического исполнения: УХЛ4.
Конструктивное исполнение по способу монтажа: IM5710.
Степень защиты: двигателей IP11; коробки выводов IP44.
Способ охлаждения: IC01.
Структура условного обозначения:
СДК | синхронный двигатель компрессорный |
2 | обозначение серии |
16 | условное обозначение габарита |
24 | длина сердечника статора, см |
12 | число полюсов |
К | консольное исполнение |
Типоразмер | Мощность, кВт | Напряжение, В | Частота вращ. | КПД, % | Масса, кг |
СДК2-16-24-12К | 315 | 6000 | 500 | 93,8 | 3075 |
 , об/мин
, об/мин Copyright © 2007 — 2022 ЗАО НК Технолоджиз
Как подключить однофазный двигатель
Содержание
- Подключение однофазного асинхронного двигателя
- С пусковой емкостью
- С рабочей емкостью
- С обоими конденсаторами
- Расчет емкостей
- Подключение однофазного синхронного электродвигателя
- Метод разгона
- Асинхронный пуск синхронного мотора
Сегодня мы рассмотрим подключение однофазного двигателя переменного тока. К таким относят асинхронные и синхронные моторы, питающиеся от одной фазы, которая обычно имеет напряжение 220 Вольт. Они очень распространены в бытовой сфере и мелком производстве, частном предпринимательстве.
К таким относят асинхронные и синхронные моторы, питающиеся от одной фазы, которая обычно имеет напряжение 220 Вольт. Они очень распространены в бытовой сфере и мелком производстве, частном предпринимательстве.
Подключение однофазного асинхронного двигателя
Для разгона асинхронного двигателя требуется создать вращающееся магнитное поле. С этим легко справляется трехфазный источник питания, где фазы сдвинуты друг относительно друга на 120 градусов. Но если речь идет о том, как подключить однофазный электродвигатель, то встает проблема: без сдвига фаз вал не начнет вращаться.
Внутри однофазного асинхронного мотора располагаются две обмотки: пусковая и рабочая. Если обеспечить сдвиг фаз в них, то магнитное поле станет вращающимся. А это главное условие для запуска электродвигателя. Сдвигать фазы можно путем добавочного сопротивления (резистора) или индуктивной катушки. Но чаще всего используют емкости – пусковой и/или рабочий конденсаторы.
С пусковой емкостью
В большинстве случаев схема включает в себя только пусковой конденсатор. Он активен только во время запуска мотора. Поэтому способ хорош, когда пуск обещает быть тяжелым, в противном случае вал не сможет разгоняться из-за небольшого начального момента. После разгона пусковой конденсатор отключается, и работа продолжается без него.
Он активен только во время запуска мотора. Поэтому способ хорош, когда пуск обещает быть тяжелым, в противном случае вал не сможет разгоняться из-за небольшого начального момента. После разгона пусковой конденсатор отключается, и работа продолжается без него.
Схема подключения двигателя со вспомогательной емкостью представлена на рисунке выше. Для ее реализации вам потребуется реле или, как минимум, одна кнопка, которую вы будете зажимать на 3 секунды во время запуска мотора в ход. Вспомогательный конденсатор вместе со вспомогательной обмоткой включаются в цепь лишь на некоторое время.
Такая схема обеспечивает оптимальный начальный крутящий момент, если имеют место незначительные броски переменного тока во время пуска. Но есть и недостаток – при работе в номинальном режиме технические характеристики падают. Это обусловлено формой магнитного поля рабочей обмотки: оно у нее овальное, а не круговое.
С рабочей емкостью
Если пуск легкий, а работа тяжелая, то вместо пускового конденсатора понадобится рабочий. Схема подключения показана ниже. Особенность заключается в том, что рабочая емкость вместе с рабочей обмоткой включена в цепь постоянно.
Схема подключения показана ниже. Особенность заключается в том, что рабочая емкость вместе с рабочей обмоткой включена в цепь постоянно.
Схема обеспечивает хорошие характеристики при работе в номинальном режиме.
С обоими конденсаторами
Компромиссное решение – использование вспомогательной и рабочей емкости одновременно. Этот способ идеален, если двигатель переменного тока пускается в ход уже с нагрузкой, и сама работа тяжела для него. Посмотрите, схема ниже – это словно две схемы (с рабочей и вспомогательной емкостью), наложенные друг на друга. При запуске на несколько секунд будет включаться пусковой механизм, а второй накопитель будет активен все время: от пуска до завершения работы.
Расчет емкостей
Наибольшую сложность для начинающих представляет расчет емкости конденсаторов. Профессионалы подбирают их опытным путем, прислушиваясь к мотору во время запуска и работы. Так они определяют, подходит накопитель, или нужно поискать другой. Но с небольшой погрешностью в большинстве случаев емкость можно рассчитать так:
- Для рабочего накопителя: 0,7-0,8 мкФ на 1000 Ватт мощности электрического двигателя;
- Для пускового конденсатора: больше в 2,5 раза.

Пример: у вас асинхронный однофазный электродвигатель на 2 кВт. Это 2000 Ватт. Значит, при подключении с рабочей емкостью нужно запастись накопителем 1,4-1,6 мкФ. Для пусковой потребуется 3,5-4 мкФ.
Подключение однофазного синхронного электродвигателя
Несмотря на сложность конструкции синхронных двигателей, они имеют много преимуществ перед асинхронными. Главное – это низкая чувствительность к скачкам напряжения, ведущих к резкому уменьшению или увеличению силы тока. Не менее значим и тот факт, что синхронные моторы могут работать даже с перегрузкой, не говоря уже об оптимальном режиме реактивной энергии и вращении вала с постоянной скоростью. Однако подключение – трудоемкий процесс, и это уже недостаток.
Метод разгона
Нельзя пустить в ход однофазный синхронный двигатель, просто подав питание на его обмотки. Потому что в момент включения направление питающего тока в статорных намотках соответствует рисунку (а). В это время на ротор, который еще находится в состоянии покоя, действует пара сил, которая будет пытаться крутить вал по часовой стрелке. Но через половину периода в статорных намотках ток поменяет свое направление. Поэтому пара сил будет уже действовать в обратном направлении, поворачивая вал против часов стрелки, как на рисунке (б). Поскольку ротор обладает большой инертностью, он так и не сдвинется с места.
Но через половину периода в статорных намотках ток поменяет свое направление. Поэтому пара сил будет уже действовать в обратном направлении, поворачивая вал против часов стрелки, как на рисунке (б). Поскольку ротор обладает большой инертностью, он так и не сдвинется с места.
Чтобы заставить ротор вращаться, необходимо, чтобы он успевал сделать хотя бы половину оборота, чтобы изменение направления тока не повиляло на его вращение. Это возможно, если разогнать вал при помощи посторонних сил. Это можно сделать двумя путями:
- Вручную;
- С использованием второго двигателя.
Собственной силой рук можно разогнать только маломощные синхронные электродвигатели. А для средне- и высокомощных агрегатов придется использовать другой мотор.
При разгоне с посторонней силой ротор начинает вращаться со скоростью, близкой к синхронной. Потом только включается обмотка возбуждения, и затем – статорная намотка.
Асинхронный пуск синхронного мотора
Если в наконечниках на полюсах ротора уложены стержни из металла, и они соединены между собой по бокам кольцами, то мотор должен запускаться асинхронным методом. Эти стержни играют роль вспомогательной обмотки, которая есть у асинхронного двигателя. При этом намотку возбуждения закорачивают с помощью разрядного резистора, а статорную обмотку подключают к сети. Только так можно обеспечить такой же разгон, как и у асинхронного электродвигателя. Но после того, как скорость вращения максимально приблизится к синхронной (достаточно 95% от нее), намотку возбуждения соединяют с источником постоянного тока. Скорость становится полностью синхронной, что влечет за собой снижение ЭДС индукции вспомогательной обмотки вплоть до нуля. И она отключается автоматически.
Эти стержни играют роль вспомогательной обмотки, которая есть у асинхронного двигателя. При этом намотку возбуждения закорачивают с помощью разрядного резистора, а статорную обмотку подключают к сети. Только так можно обеспечить такой же разгон, как и у асинхронного электродвигателя. Но после того, как скорость вращения максимально приблизится к синхронной (достаточно 95% от нее), намотку возбуждения соединяют с источником постоянного тока. Скорость становится полностью синхронной, что влечет за собой снижение ЭДС индукции вспомогательной обмотки вплоть до нуля. И она отключается автоматически.
Важно! Вспомогательные металлические стержни должны обладать высоким активным сопротивлением. В противном случае пусковой момент будет недостаточным для разгона ротора. А закорачивать намотку возбуждения необходимо по одной простой причине: если этого не сделать, то у нее в момент пуска случится пробой, потому что она задает вращение в том же направление, что и пусковая обмотка.

Схема и способ подключения вашего двигателя будет зависеть от того, какой он у вас: синхронный или асинхронный. В учет идет также мощность мотора, а также способ пуска: с нагрузкой или без. Разобраться в рисунках вам поможет элементарное понимание механики и электромагнитных явлений.
Синхронные двигатели и генераторы | Industry Today
Функция и использование синхронных двигателей.
В настоящее время имеется большой выбор синхронных двигателей и генераторов для широкого спектра промышленных применений. Электродвигатели стали неотъемлемой частью промышленного производства. Они преобразуют электрическую энергию в механическую, позволяя промышленным машинам выполнять возложенные на них задачи. Не все электродвигатели выполняют схожий набор задач, но некоторые из них специально разработаны для той или иной отрасли.
Применение в промышленности
Помимо множества различных функций, облегчаемых тщательно разработанными двигателями, задачи, выполняемые в промышленности, пожалуй, самые сложные. Некоторые электродвигатели используются при добыче угля, а некоторые двигатели обеспечивают энергию для дробления и измельчения в цементной промышленности. С другой стороны, для сталелитейных заводов требуется стабильный ввод для обеспечения непрерывности их производственного процесса в чрезвычайно теплой атмосфере. По этой причине они часто используют специальные двигатели для конвейерных лент. Сахарная промышленность полагается на специализированные высоковольтные двигатели или двигатели высшего класса IE4, поскольку они могут обеспечивать более высокое напряжение, не требуя большого количества электроэнергии.
Некоторые электродвигатели используются при добыче угля, а некоторые двигатели обеспечивают энергию для дробления и измельчения в цементной промышленности. С другой стороны, для сталелитейных заводов требуется стабильный ввод для обеспечения непрерывности их производственного процесса в чрезвычайно теплой атмосфере. По этой причине они часто используют специальные двигатели для конвейерных лент. Сахарная промышленность полагается на специализированные высоковольтные двигатели или двигатели высшего класса IE4, поскольку они могут обеспечивать более высокое напряжение, не требуя большого количества электроэнергии.
Применение в производственных машинах
Электродвигатели используются не только для питания полей и оборудования, но и для привода целого ряда производственных машин. Двигатели внизу — это те, которые приводят в движение пропеллер, включают турбину или всасывают дым и мусор в людных общественных или частных местах. В гидротехнических сооружениях именно электродвигатели помогают накачивать воду. Кроме того, существуют усовершенствованные трехфазные электродвигатели, которые используются в компрессорах, поскольку они могут достаточно охлаждаться и, таким образом, выдерживать более высокие температуры. Эти преимущества также делают их идеальным выбором для промышленных котлов.
Кроме того, существуют усовершенствованные трехфазные электродвигатели, которые используются в компрессорах, поскольку они могут достаточно охлаждаться и, таким образом, выдерживать более высокие температуры. Эти преимущества также делают их идеальным выбором для промышленных котлов.
В электрических системах, которые мы используем в промышленности, на электростанциях или в частных домах, двигатели и генераторы стали повседневным устройством. В связи со спросом на системы с высокой энергоэффективностью и низким энергопотреблением можно наблюдать изобретение новых моделей этих электрических устройств. Основным расчетным фактором для надежной работы двигателей и генераторов является коэффициент мощности. Это отношение подаваемой мощности к требуемой мощности. Обычно общая мощность, потребляемая в промышленности и на заводах, рассчитывается на основе коэффициента мощности. Поэтому коэффициент мощности всегда должен поддерживаться на постоянном уровне. Однако из-за увеличения реактивной мощности в этих устройствах снижается коэффициент мощности. Введено множество методов для поддержания коэффициента мощности на постоянном уровне. Концепция синхронного двигателя является одной из них.
Введено множество методов для поддержания коэффициента мощности на постоянном уровне. Концепция синхронного двигателя является одной из них.
Синхронный двигатель: что это такое?
Вот как определяется синхронный двигатель: Двигатель переменного тока, в котором в стационарном состоянии вращение вала синхронно частоте приложенного тока.
Синхронный двигатель не работает с асинхронным током. В отличие от асинхронных двигателей, эти двигатели имеют многофазные магниты переменного тока на статоре, которые создают вращающееся магнитное поле. В этом случае ротор имеет постоянный магнит, который синхронен с вращающимся магнитным полем и вращается синхронно с частотой подаваемого тока.
Функциональность синхронного двигателя
Работа синхронных двигателей основана на взаимодействии магнитного поля статора в сочетании с магнитным полем ротора. В статор включены трехфазные обмотки, работающие от трехфазного тока. Таким образом, обмотка статора создает трехфазное вращающееся магнитное поле. Ротор питается постоянным током.
Ротор питается постоянным током.
Если нагрузка превышает аварийную нагрузку, двигатель десинхронизируется. Преимущество трехфазной обмотки статора заключается в том, что она определяет направление вращения. При однофазной обмотке нет необходимости определять направление вращения, и двигатель может запускаться в обоих направлениях. Пусковые устройства необходимы для управления направлением вращения этих синхронных двигателей.
Области применения синхронных двигателей
Синхронные двигатели обычно используются в приложениях, в которых требуется постоянная и точная скорость. Типичным применением этих маломощных двигателей являются позиционеры. Они также используются в приводах роботов. Синхронные двигатели также используются в шаровых мельницах, часах, проигрывателях и проигрывателях. Они также используются в качестве серводвигателей и синхронизаторов.
Такие двигатели доступны в диапазоне от размера подковы до промышленного размера с высокой производительностью. Хотя они используются в высокопроизводительных промышленных размерах, эти двигатели могут выполнять две основные функции. Один из них является эффективным средством преобразования энергии переменного тока в механическую энергию, а другой — корректором коэффициента мощности.
Хотя они используются в высокопроизводительных промышленных размерах, эти двигатели могут выполнять две основные функции. Один из них является эффективным средством преобразования энергии переменного тока в механическую энергию, а другой — корректором коэффициента мощности.
Управление синхронным двигателем с постоянными магнитами (PMSM)
Синхронные двигатели с постоянными магнитами (PMSM) являются бесщеточными и обладают очень высокой надежностью и эффективностью. Из-за их ротора с постоянными магнитами они также имеют более высокий крутящий момент при меньшем размере корпуса и отсутствии тока ротора, что является преимуществом перед асинхронными двигателями переменного тока (AICM). Благодаря высокому соотношению мощности и размера, СДПМ могут помочь уменьшить размер вашей конструкции без потери крутящего момента. СДПМ должны быть коммутированы, как двигатели BLDC, но из-за конструкции обмоток форма волны должна быть синусоидальной для хорошей работы. Поскольку для этого требуются более сложные алгоритмы управления, более производительные контроллеры, такие как наши контроллеры цифровых сигналов (DSC) dsPIC33 или наши 32-разрядные PIC32MK или Arm 9. 0039 ® Cortex-M ® на основе микроконтроллеров SAM (MCU) были бы отличным вариантом. Мы предлагаем комплексную экосистему, которая поможет вам разработать передовые решения для управления PMSM, такие как бездатчиковое поле-ориентированное управление (FOC). Наши решения также поддерживают синхронные двигатели с постоянными магнитами поверхностного монтажа (SPMSM) и внутренние синхронные двигатели с постоянными магнитами (IPMSM).
0039 ® Cortex-M ® на основе микроконтроллеров SAM (MCU) были бы отличным вариантом. Мы предлагаем комплексную экосистему, которая поможет вам разработать передовые решения для управления PMSM, такие как бездатчиковое поле-ориентированное управление (FOC). Наши решения также поддерживают синхронные двигатели с постоянными магнитами поверхностного монтажа (SPMSM) и внутренние синхронные двигатели с постоянными магнитами (IPMSM).
Применение
- Компрессоры кондиционеров и холодильников (AC)
- Стиральные машины с прямым приводом
- Автомобильный электроусилитель руля
- Инструменты для обработки
- Контроль тяги
- Хранение данных
Читать далее
Рекомендуемые продукты для управления СДПМ
Усовершенствованные решения для управления двигателями СДПМ с использованием DSC dsPIC33 и 32-разрядных микроконтроллеров PIC32MK и SAM
Поскольку двигатели PMSM должны приводиться в действие синусоидальными сигналами, сложность управления возрастает. Наше семейство DSC dsPIC33 предлагает производительность цифровой обработки сигналов (DSP) и усовершенствованные периферийные устройства управления двигателем для генерации сигналов для усовершенствованных алгоритмов управления PMSM, таких как FOC, ослабление потока, бездатчиковое управление и обнаружение опрокидывания. Наши 32-разрядные микроконтроллеры PIC32MK и SAM оснащены высокопроизводительными периферийными устройствами, предназначенными для высокоскоростного управления двигателем с обратной связью. Нажмите на ссылки в таблице ниже, чтобы узнать больше об этих продуктах.
Наше семейство DSC dsPIC33 предлагает производительность цифровой обработки сигналов (DSP) и усовершенствованные периферийные устройства управления двигателем для генерации сигналов для усовершенствованных алгоритмов управления PMSM, таких как FOC, ослабление потока, бездатчиковое управление и обнаружение опрокидывания. Наши 32-разрядные микроконтроллеры PIC32MK и SAM оснащены высокопроизводительными периферийными устройствами, предназначенными для высокоскоростного управления двигателем с обратной связью. Нажмите на ссылки в таблице ниже, чтобы узнать больше об этих продуктах.
Читать далее
Однокристальные драйверы двигателей и затворов
Мы предлагаем полную линейку однокристальных 3-фазных бесщеточных драйверов и 3-фазных бесщеточных драйверов затворов MOSFET для широкого спектра применений двигателей. Эти продукты предназначены для взаимодействия с любым микроконтроллером с помощью простого входа с широтно-импульсной модуляцией (ШИМ) или могут использоваться в автономной конфигурации. Нажмите на продукты, перечисленные в таблице ниже, чтобы узнать больше.
Нажмите на продукты, перечисленные в таблице ниже, чтобы узнать больше.
- Однокристальные драйверы со встроенным полевым МОП-транзистором для управления двигателем СДПМ
- Драйверы затворов MOSFET для управления двигателем PMSM
Читать далее
Некоторые основы синхронных двигателей с постоянными магнитами (СДПМ)
Принцип работы СДПМ
Синхронный двигатель с постоянными магнитами (СДПМ) представляет собой синхронный двигатель переменного тока, возбуждение поля которого обеспечивается постоянными магнитами и который имеет синусоидальную форму обратной ЭДС. . Постоянные магниты позволяют СДПМ создавать крутящий момент при нулевой скорости. PMSM обеспечивают более высокую плотность крутящего момента по сравнению с асинхронными двигателями переменного тока (ACIM), обеспечивая меньший размер корпуса при той же мощности. Они также обеспечивают высокоэффективную работу, но требуют инвертора с цифровым управлением.
PMSM Характеристики
- Отсутствие искр, безопасность во взрывоопасных средах
- Чисто, быстро и эффективно
- Предназначен для высокопроизводительных сервоприводов
- Работает с/без датчиков положения
- Более компактный, эффективный и легкий, чем ACIM
- Обеспечивает оптимальный крутящий момент в сочетании с поле-ориентированным управлением (FOC)
- Плавная работа на низких и высоких скоростях
- Низкий уровень шума и электромагнитных помех
Внедрение управления PMSM
Как это работает
Двигатели PMSM и BLDC обычно могут приводиться в действие либо с помощью шестиступенчатой коммутации, либо с синусоидальной коммутацией. Двигатель должен иметь надлежащую механическую и электрическую конструкцию для достижения преимуществ синусоидального режима, как указано выше. Лучше всего спросить у производителя, какой метод привода лучше всего подходит для данного двигателя. Синусоидальный режим требует более точной обратной связи по положению ротора от двигателя и более сложного алгоритма переключения инвертора. PMSM лучше всего управляется с помощью высокопроизводительного микроконтроллера dsPIC33 DSC, 32-разрядного микроконтроллера PIC32MK или SAM.
Синусоидальный режим требует более точной обратной связи по положению ротора от двигателя и более сложного алгоритма переключения инвертора. PMSM лучше всего управляется с помощью высокопроизводительного микроконтроллера dsPIC33 DSC, 32-разрядного микроконтроллера PIC32MK или SAM.
Читать далее
Функции микроконтроллера для управления PMSM
Полевой контроль (FOC)
FOC использует математические преобразования для получения крутящего момента и магнитного потока двигателя как времени в различных переменных из трехфазной обратной связи по току. Это преобразование позволяет использовать простые методы управления крутящим моментом и скоростью, такие как двигатель постоянного тока.
Читать далее
Поле-ориентированное управление имеет следующие преимущества:
- Синусоидальный привод V/F обеспечивает плавное управление на низких скоростях, но неэффективен на высоких скоростях; FOC обеспечивает плавное управление на низких скоростях, а также эффективное управление на высоких скоростях
- Лучшее в своем классе динамическое реагирование на крутящий момент, эффективность и решение для управления двигателем с наименьшими затратами на систему
Функции микроконтроллера dsPIC33 DSC или PIC32MK и SAM для поддержки FOC:
- Высокопроизводительный АЦП для одновременной выборки напряжения и тока двигателя
- Двигатель цифровой обработки сигналов (DSP) для поддержки:
- Оценка скорости и положения ротора на основе измерения тока двигателя
- Преобразования Кларка и Парка и два контура пропорционального интеграла (ПИ) для управления крутящим моментом и магнитным потоком
- Выходы контуров PI преобразуются с использованием модуляции пространственного вектора для управления выходами ШИМ управления двигателем
ПЛИС для многоосевого управления двигателем
Создайте безопасное и надежное многоосевое детерминированное управление двигателем на единой системе на кристалле (SoC) FPGA. ПЛИС обеспечивают множество преимуществ для приложений управления двигателем, в том числе:
ПЛИС обеспечивают множество преимуществ для приложений управления двигателем, в том числе:
- Компактное решение для экономии места на плате и уменьшения размера изделия
- Скорость двигателя превышает 100 000 об/мин для бессенсорного FOC
- Низкая задержка 1 мкс для контура ВОК от измерения АЦП до генерации ШИМ позволяет переключать частоты до 500 кГц.
- Гибкость проектирования благодаря модульному пакету IP
- Расширенные функции безопасности, такие как проскальзывание ротора, обнаружение перегрузки и защита от перегрузки по току
- Интеграция системных функций SoC снижает общую стоимость владения (TCO)
Читать далее
Узнайте больше о FPGAS для управления двигателем
Скачать ресурсы для FPGAS
Аппаратные и программные решения для управления двигателем
Рекомендуемые программные средства
MotorBench® Development Suite
MotorBench Development Suite — это инструмент разработки программного обеспечения на основе графического пользовательского интерфейса (GUI) для ориентированного на поле управления (FOC). Он выполняет точное измерение критических параметров двигателя и автоматическую настройку усиления обратной связи, а также генерирует исходный код для MPLAB 9.0039 ® X IDE проект с использованием Motor Control Application Framework (MCAF).
Он выполняет точное измерение критических параметров двигателя и автоматическую настройку усиления обратной связи, а также генерирует исходный код для MPLAB 9.0039 ® X IDE проект с использованием Motor Control Application Framework (MCAF).
Алгоритм приложения для управления двигателем и прикладное программное обеспечение
Для поддержки разработки приложений для двигателей мы предоставляем библиотеки управления двигателями и примеры для ориентированного на поле управления (FOC), ветроэнергетики, компенсации звена постоянного тока, ослабления поля и многих других задач управления алгоритмы.
Библиотека управления двигателем
Библиотека управления двигателем содержит функциональные блоки FOC, оптимизированные для семейства DSC dsPIC33. Функции библиотеки предназначены для использования в рамках любой прикладной среды, предоставляя эффективное и гибкое решение для реализации приложения управления двигателем.
Моделирование управления двигателем
Если вы ищете решение для быстрого прототипирования для использования с MATLAB ® или Scilab ® , наш пакет моделирования позволяет вам скомпилировать Simulink ® в модель, которую можно преобразовать во флэш-память.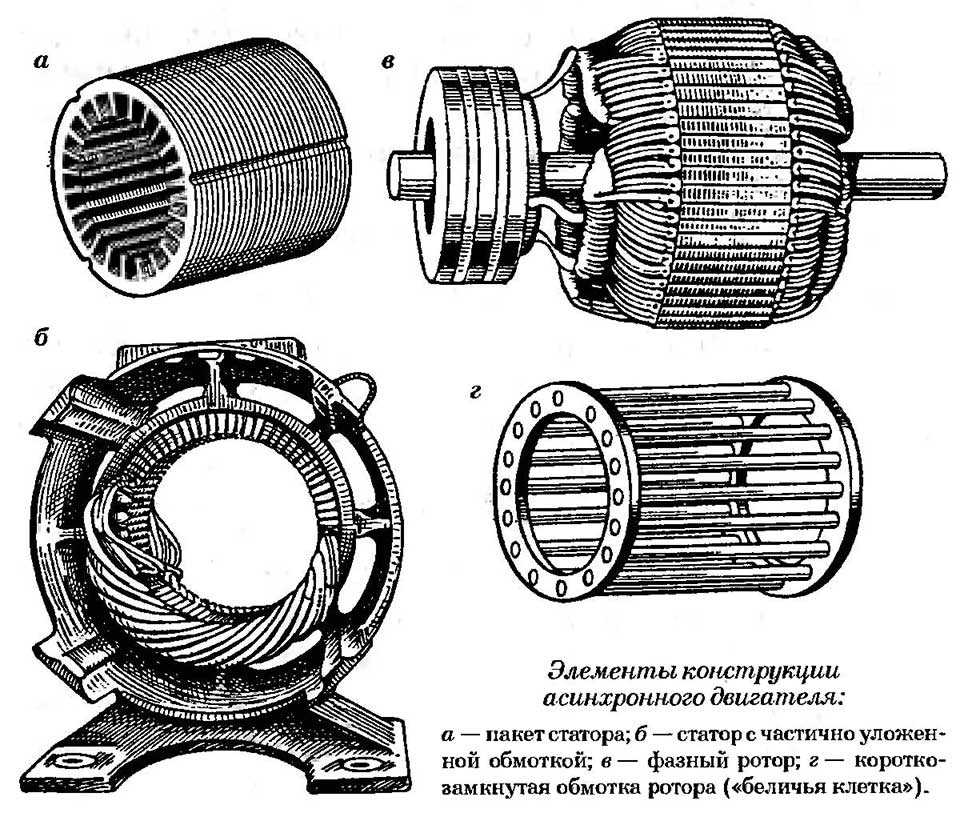 dsPIC ® DSC одним нажатием кнопки. Наборы блоков библиотеки управления двигателем, модель двигателя и макетные платы обеспечивают полную среду разработки управления двигателем.
dsPIC ® DSC одним нажатием кнопки. Наборы блоков библиотеки управления двигателем, модель двигателя и макетные платы обеспечивают полную среду разработки управления двигателем.
MPLAB® X Интегрированная среда разработки (IDE)
MPLAB X Integrated Development Environment (IDE) — это расширяемая программа с широкими возможностями настройки, которая включает в себя мощные инструменты, которые помогут вам обнаруживать, настраивать, разрабатывать, отлаживать и аттестовать встроенные конструкции для микроконтроллеров и контроллеров цифровых сигналов Microchip.
Конфигуратор кода MPLAB (MCC)
Конфигуратор кода MPLAB (MCC) — это бесплатная графическая среда программирования, которая создает бесшовный, простой для понимания код C, который можно вставить в ваш проект.
Рекомендуемые аппаратные инструменты
Нет результатов не обнаружили
DSPIC33CK Низковольтный моторный контроль моторного управления (LVMC).
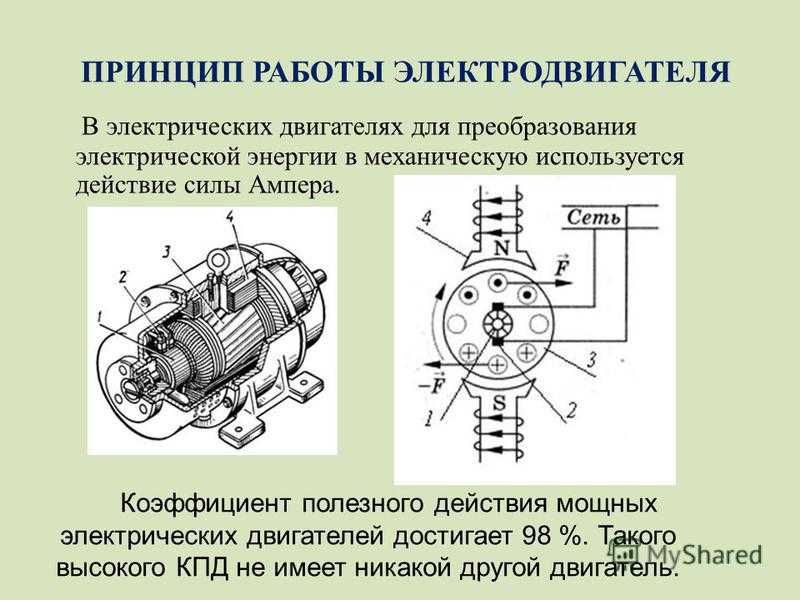 Совет по развитию управления
Совет по развитию управления
Учить больше
Рекомендации по применению и программное обеспечение
Читать далее
Продукты
- dsPIC33 Продукты управления двигателем
- Все микроконтроллеры управления двигателем
- 32-разрядные продукты управления двигателем
- Драйверы трехфазных двигателей
- Драйверы шаговых и щеточных двигателей постоянного тока
Загрузка
Просмотреть все параметры
Пожалуйста, посетите полную параметрическую диаграмму.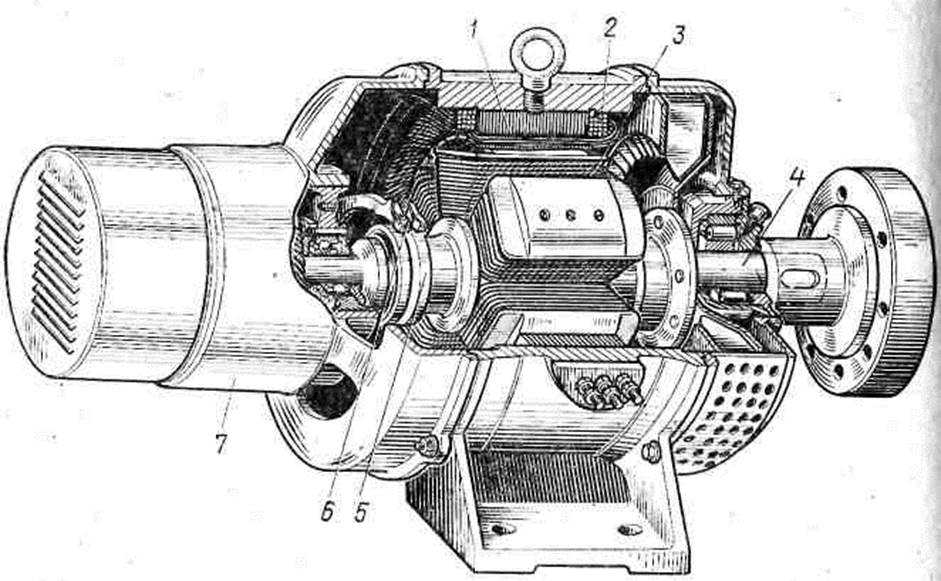 Если вы все еще не можете найти
Если вы все еще не можете найти
диаграмму, которую вы ищете, пожалуйста, заполните нашу
Форма обратной связи на сайте
чтобы уведомить нас об этой проблеме.
Загрузка
Просмотреть все параметры
Пожалуйста, посетите полную параметрическую диаграмму. Если вы все еще не можете найти
диаграмму, которую вы ищете, пожалуйста, заполните нашу
Форма обратной связи на сайте
чтобы уведомить нас об этой проблеме.
Загрузка
Просмотреть все параметры
Пожалуйста, посетите полную параметрическую диаграмму. Если вы все еще не можете найти
диаграмму, которую вы ищете, пожалуйста, заполните нашу
Форма обратной связи на сайте
чтобы уведомить нас об этой проблеме.
Загрузка
Просмотреть все параметры
Пожалуйста, посетите полную параметрическую диаграмму. Если вы все еще не можете найти
Если вы все еще не можете найти
диаграмму, которую вы ищете, пожалуйста, заполните нашу
Форма обратной связи на сайте
чтобы уведомить нас об этой проблеме.
Загрузка
Просмотреть все параметры
Пожалуйста, посетите полную параметрическую диаграмму. Если вы все еще не можете найти
диаграмму, которую вы ищете, пожалуйста, заполните нашу
Форма обратной связи на сайте
чтобы уведомить нас об этой проблеме.
Документация
- Указания по применению
- Брошюры
- Примеры кода
- Программное обеспечение
- Руководства пользователя
- Белая книга
| Заголовок | Скачать |
|---|---|
| Бездатчиковое полеориентированное управление синхронным двигателем с постоянными магнитами с использованием наблюдателя в скользящем режиме | Скачать |
| AN1292 — ВОК с двойным шунтированием и ФАПЧ | Скачать |
| AN984 — Введение в управление асинхронным двигателем переменного тока | Скачать |
| AN1305 — бездатчиковое управление 3-фазным бесколлекторным двигателем с PIC16FXXX | Скачать |
| AN1162 — Бездатчиковое полеориентированное управление (FOC) асинхронным двигателем переменного тока (ACIM) | Скачать |
| AN1206 — Бездатчиковое полеориентированное управление (FOC) асинхронным двигателем переменного тока (ACIM) с использованием ослабления поля | Скачать |
| AN2584 — встроенная коррекция коэффициента мощности (PFC) и бездатчиковая | Скачать |
| AN3049 — Бездатчиковое управление положением щеточного двигателя постоянного тока с использованием метода подсчета пульсаций | Скачать |
| AN955 — VF-управление 3-фазным асинхронным двигателем | Скачать |
| AN900 — Управление трехфазными асинхронными двигателями переменного тока с помощью PIC18F4431 | Скачать |
| AN967 — Двунаправленное управление VF одно- и трехфазными асинхронными двигателями с использованием PIC16F72 | Скачать |
| AN887 — Основы асинхронного двигателя переменного тока | Скачать |
| AN889 — VF-управление 3-фазными асинхронными двигателями с использованием микроконтроллеров PIC16F7X7 | Скачать |
| AN2520 — Бездатчиковое полеориентированное управление (FOC) для синхронного двигателя с постоянными магнитами (PMSM) с использованием оценщика PLL и ослабления потока на основе уравнения (FW) Примечание по применению | Скачать |
| AN2757 — Сенсорное (на основе энкодера) полеориентированное управление трехфазным синхронным двигателем с постоянными магнитами (PMSM) | Скачать |
| AN2590 — Бездатчиковый ВОК для СДПМ, использующий наблюдатель Люенбергера уменьшенного порядка — Бездатчиковый ВОК для СДПМ, использующий наблюдатель Люенбергера уменьшенного порядка Примечание по применению | Скачать |
| AN696 — Серводвигатель постоянного тока PIC18CXXX/PIC16CXXX | Скачать |
| AN843 — Управление скоростью трехфазного асинхронного двигателя с использованием микроконтроллеров PIC18 | Скачать |
| AN822 — микрошаговый шаговый двигатель на PIC18C452 | Скачать |
| AN857 — простое управление бесщеточным двигателем постоянного тока | Скачать |
| Заголовок | Скачать |
|---|---|
| Брошюра по управлению двигателем и приводу | Скачать |
| Заголовок | Скачать |
|---|---|
| CE002 Настройка 10-разрядных аналого-цифровых преобразователей dsPIC DSC для скорости преобразования 1 Мбит/с | Скачать |
| CE019 — Пропорционально-интегрально-дифференциальные (ПИД) регуляторы и управление с обратной связью | Скачать |
| Бездатчиковый анализатор FOC PLL MCLV | Скачать |
| PFC Безсенсорный анализатор FOC PLL MCHV | Скачать |
| CE155 — Пример мониторинга данных в реальном времени (RTDM) | Скачать |
| Заголовок | Скачать |
|---|---|
| Библиотека управления двигателем dsPIC33 для FOC | Скачать |
| Заголовок | Скачать |
|---|---|
| Руководство пользователя макетной платы dsPICDEM MCLV-2 (DM330021-2) | Скачать |
| Руководство пользователя макетной платы dsPICDEM MCSM | Скачать |
| Начальный комплект управления двигателем с руководством пользователя mTouch | Скачать |
| dsPICDEM MCHV-2 Руководство пользователя макетной платы | Скачать |
| Заголовок | Скачать |
|---|---|
| WP100 — Как превратить асинхронный двигатель переменного тока в двигатель постоянного тока (вопрос перспективы) | Скачать |
Синхронные двигатели – TECO-Westinghouse | Мировой лидер в производстве электродвигателей и генераторов
Перейти к содержимому
Синхронные двигателиDev1 Dev12018-12-12T20:17:13+00:00
Full Speed Ahead
Синхронные двигатели и генераторы TECO-Westinghouse обеспечивают превосходную ценность с точки зрения проверенной надежности, низких эксплуатационных характеристик и длительного срока службы в любом приложении.
 Наши синхронные машины имеют множество преимуществ, в том числе:
Наши синхронные машины имеют множество преимуществ, в том числе:
- Работа с постоянной скоростью
- Высокая эффективность
- Низкие пусковые токи
- Опережающий коэффициент мощности (для корректирующей способности кВА)
Эти характеристики делают их оптимальным выбором для многих промышленных приводов.
Повышение коэффициента мощности является одним из наиболее привлекательных соображений при выборе синхронной машины. Синхронные двигатели работают с опережающими коэффициентами мощности и доступны с номинальным коэффициентом мощности от единицы до опережающего. Таким образом, они могут обеспечить существенную экономию за счет подачи кВАр для противодействия отставанию мощности, вызванному другими индуктивными нагрузками.
-
Request a Quote
-
Synchronous Brochure
-
Custom Motors flyer Spanish
Features
Applications
For Unequalled Dielectric Strength and Voltage Endurance
TECO-Westinghouse synchronous machines настраиваются в соответствии с конкретными требованиями каждого приложения.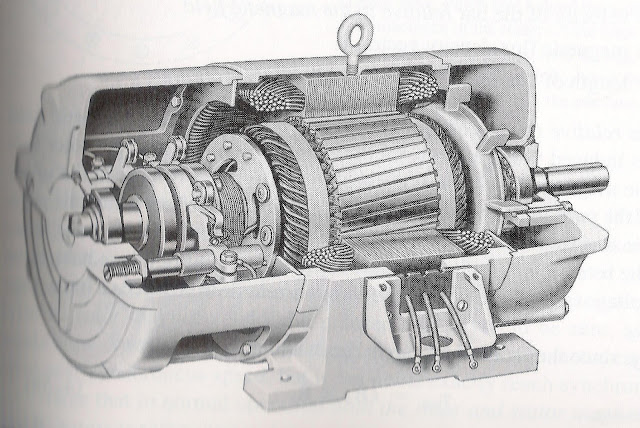 Благодаря своим уникальным характеристикам, высокой эффективности работы и возможности адаптации к любым условиям эксплуатации синхронные двигатели и генераторы являются логичным выбором для множества отраслей промышленности. К ним относятся целлюлозно-бумажная промышленность, электроэнергетика, судостроение, очистка воды и сточных вод, химическая и нефтехимическая, сталелитейная, горнодобывающая, цементная и воздухоразделительная…
Благодаря своим уникальным характеристикам, высокой эффективности работы и возможности адаптации к любым условиям эксплуатации синхронные двигатели и генераторы являются логичным выбором для множества отраслей промышленности. К ним относятся целлюлозно-бумажная промышленность, электроэнергетика, судостроение, очистка воды и сточных вод, химическая и нефтехимическая, сталелитейная, горнодобывающая, цементная и воздухоразделительная…
Синхронные машины можно найти везде, где есть потребность в высокоэффективных, экономичных и надежных машинах. Они часто используются для прокатных, шаровых и вибрационных мельниц, рубительных машин, смесителей, рафинеров целлюлозы, насосов, вентиляторов и приводов компрессоров (поршневых и центральных).
Могут быть оснащены преобразователями частоты (ШИМ, LCI и циклопреобразователь) для плавного пуска или регулирования скорости.
Благодаря всем достижениям, достигнутым в технологии преобразователей частоты, синхронный двигатель с регулируемой скоростью является логичным выбором для приложений, требующих высокого крутящего момента при низкой скорости в диапазоне высоких скоростей.
Высокоэффективная конструкция
Синхронные машины TECO-Westinghouse отличаются высокоэффективной конструкцией, в которой особое внимание уделяется минимизации потерь. Различные конструктивные особенности выбираются вручную для обеспечения максимальной эффективности работы и бесперебойной работы:
- Воздушный зазор, раскрытие пазов и соотношение пазов выбираются для уменьшения потерь на поверхности полюса из-за пульсаций потока.
- Штамповка статора из нестареющей кремнистой стали с низкими потерями и покрытием из сердечника различных размеров выбрана для уменьшения потерь в сердечнике.
- Медь статора скручена для минимизации потерь на вихревые токи.
- Количество пазов статора, ширина паза, глубина паза и глубина сердечника статора рассчитаны на снижение магнитного шума.
- предназначена для уменьшения потока рассеяния полюсов и возбуждения возбуждения для уменьшения потерь в меди.
- тщательно подобраны, чтобы уменьшить потери воздуха и обеспечить максимальное охлаждение. Это помогает уменьшить общий размер машины.
- предназначены для обеспечения герметичности и жесткости сборки сердечника, минимизации шума из-за деформации сердечника и передачи крутящего момента на перегородку рамы.
Перфорация полюсов

Вентиляторы
Торцевые пластины статора
Подшипниковая система с разъемными втулками
Подшипниковая система была разработана и спроектирована для непрерывной, надежной работы и простоты обслуживания. Подшипники скольжения и маслосъемные кольца разделены для обеспечения доступа для визуального осмотра и обслуживания. Безпустотный центробежнолитой баббит приклеен к толстостенному вкладышу подшипника со сферическими посадочными поверхностями. Тщательно сбалансированные бронзовые смазочные кольца и канавки для сбора масла в направляющих смазочных колец с баббитовой футеровкой обеспечивают обильную подачу смазки к подшипнику.
Подшипниковый узел включает четырехкомпонентную систему уплотнений подшипника, предназначенную для предотвращения нежелательных утечек. Система уплотнений состоит из внутреннего и внешнего плавающих лабиринтных масляных уплотнений и внутреннего и внешнего воздушных уплотнений. Эти уплотнения работают вместе, чтобы удерживать масло в подшипниках, не допуская попадания грязи и загрязняющих веществ.
Медная конструкция ротора
Высокоскоростные синхронные машины TECO-Westinghouse имеют проверенную временем конструкцию ротора. Для передачи высокого крутящего момента во всем диапазоне скоростей прочная конструкция этих роторов премиум-класса не имеет себе равных.
Конструкция ротора начинается с поковки вала из высокопрочной легированной стали, которая прецизионно обработана, отшлифована и обработана в соответствии с нашими точными допусками. Затем крестовина ротора изготавливается из массивных стальных пластин и подвергается механической обработке для сопряжения с валом, чтобы сформировать узел сердечника ротора. Затем в крестовине фрезеруются прорези в виде ласточкиного хвоста, чтобы принять полюсные наконечники в форме ласточкиного хвоста, которые фиксируются на месте с помощью конических шпонок. Конструкция стойки типа «ласточкин хвост» (на фото ниже) обеспечивает надежное крепление к валу и крестовине.
Затем в крестовине фрезеруются прорези в виде ласточкиного хвоста, чтобы принять полюсные наконечники в форме ласточкиного хвоста, которые фиксируются на месте с помощью конических шпонок. Конструкция стойки типа «ласточкин хвост» (на фото ниже) обеспечивает надежное крепление к валу и крестовине.
Полюса ротора состоят из тонких пластин, скрепленных вместе болтами, образуя полюсные наконечники. Катушки возбуждения согнуты по краям и намотаны лентой, а затем изолированы с помощью специально разработанной термореактивной системы изоляции витков перед установкой на полюса ротора. Змеевики располагаются в шахматном порядке для обеспечения эффективной теплопередачи и прочно закрепляются на этапе окончательной сборки.
Амортизирующие обмотки используют демпферные стержни и сегменты из меди/медного сплава. Профилированное медное соединение между соседними полюсами снижает термические напряжения, возникающие при запуске.
Высококачественные пластины статора
Пластины статора точно вырублены из тонкой, нестареющей высококачественной кремнистой стали с предварительно нанесенным покрытием, которая была изолирована с обеих сторон для минимизации потерь в сердечнике.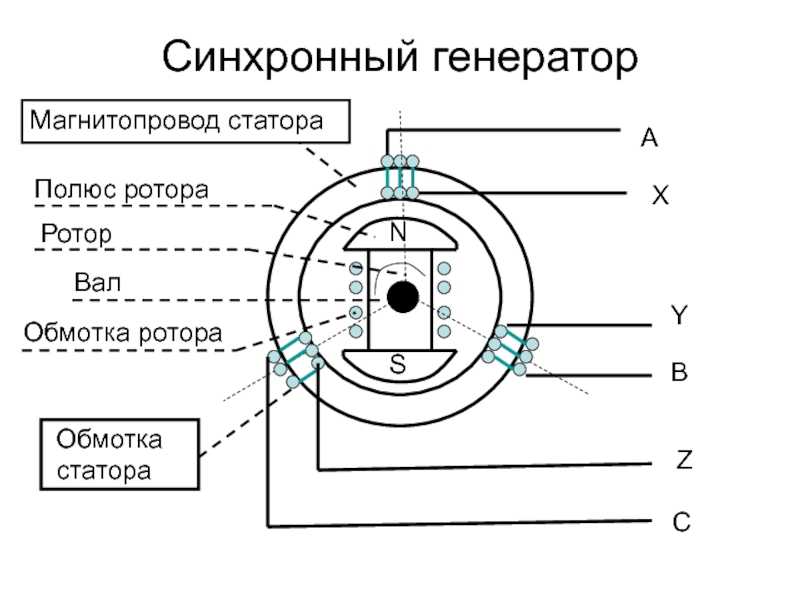 Сердечник статора состоит из этих сегментных штамповок из кремнистой стали и удерживается под давлением между двумя концевыми пластинами сквозными болтами, которые туго затянуты и приварены прихватками. Кроме того, к сердечнику статора и торцевым пластинам приваривается набор стержней для обеспечения герметичности, жесткости при кручении и адекватной передачи крутящего момента воздушного зазора на основание двигателя. В результате получается постоянно плотный и концентрический сердечник с равномерным воздушным зазором. Эксклюзивная конструкция перфорации TECO-Westinghouse предотвращает смещение пластин.
Сердечник статора состоит из этих сегментных штамповок из кремнистой стали и удерживается под давлением между двумя концевыми пластинами сквозными болтами, которые туго затянуты и приварены прихватками. Кроме того, к сердечнику статора и торцевым пластинам приваривается набор стержней для обеспечения герметичности, жесткости при кручении и адекватной передачи крутящего момента воздушного зазора на основание двигателя. В результате получается постоянно плотный и концентрический сердечник с равномерным воздушным зазором. Эксклюзивная конструкция перфорации TECO-Westinghouse предотвращает смещение пластин.
Термоэластичная эпоксидная изоляция
Система изоляции статора наших синхронных машин представляет собой термоэластичную эпоксидную изоляцию. Это система изоляции премиум-класса, разработанная компанией Westinghouse и проверенная более чем тридцатилетним опытом работы на тысячах двигателей и генераторов Westinghouse. Компания Thermalastic находится в постоянном развитии, чтобы сохранить свои позиции лучших в мире. Выдающиеся результаты Thermalastic можно объяснить тем фактом, что это система изоляции на основе слюды. Слюда уже давно признана самым надежным изоляционным материалом благодаря своим превосходным диэлектрическим свойствам и стойкости к напряжению.
Компания Thermalastic находится в постоянном развитии, чтобы сохранить свои позиции лучших в мире. Выдающиеся результаты Thermalastic можно объяснить тем фактом, что это система изоляции на основе слюды. Слюда уже давно признана самым надежным изоляционным материалом благодаря своим превосходным диэлектрическим свойствам и стойкости к напряжению.
Тщательные производственные процедуры, в том числе тщательное тестирование в критических точках процесса, гарантируют превосходную систему изоляции. Во-первых, на обмотки статора с формованной обмоткой наносится слюдяная изоляция. Затем катушки устанавливаются в пазы, а полностью намотанный статор подвергается последующей пропитке эпоксидной смолой в вакуумном резервуаре высокого давления. Далее его переносят в печь для полимеризации смолы. Цикл повторяется для двойной защиты. Результатом является система изоляции статора без пустот, образующих коронный разряд, способная выдерживать длительные скачки напряжения, влажность, истирание, грязь, термоциклирование и частые пусковые скачки напряжения.
В зависимости от физического размера и номинального напряжения машин используются различные типы термопластичной изоляции. В машинах напряжением более 7000 вольт пазовые участки изолированной катушки обмотаны полупроводящей лентой, которая в сочетании с короноподавляющим полупроводящим покрытием, нанесенным на концы прямого участка, защищает статор от повреждения коронным разрядом. Для машин очень большого диаметра на отдельные катушки наносится термопластичная изоляция. Каждая катушка пропитывается под вакуумом смолой, не содержащей растворителей, и отверждается перед наматыванием в пазы сердечника статора. Дополнительное упругое эластомерное внешнее покрытие доступно для применений, в которых изоляция подвергается воздействию абразивных сред.
Бесщеточное возбуждение
Бесщеточное возбуждение с эксклюзивным управлением TECO-Westinghouse PULSE/SYN доступно для всех синхронных двигателей и генераторов с фиксированной скоростью и пуском от сети. Он хорошо подходит для таких установок, как нефтеперерабатывающие заводы и химические заводы, требующих минимального технического обслуживания и устранения искрообразования.
Он хорошо подходит для таких установок, как нефтеперерабатывающие заводы и химические заводы, требующих минимального технического обслуживания и устранения искрообразования.
Бесколлекторная система возбуждения TECO-Westinghouse состоит из резистора полевого разряда, диодов, тиристора, стробирующего модуля и синхронизирующего модуля. Разрядный резистор шунтируется поперек поля двигателя во время пуска. При правильном скольжении и фазовом угле резистор автоматически отключается от цепи возбуждения, и на поле подается постоянный ток, чтобы синхронизировать двигатель.
Ключом к системе Pulse/SYN является синхронизирующий модуль. Этот модуль имеет две отдельные функции. Первая функция — синхронизация фазового угла. Модуль контролирует скорость вращения ротора (по частоте напряжения наведенного поля) и угол сдвига фаз ротора (по углу сдвига фаз наведенного напряжения). Когда скорость и фазовый угол таковы, что вызывают минимальные помехи в системе питания, подается напряжение возбуждения, и двигатель «втягивается» в синхронизацию.
Вторая функция модуля синхронизации — обработка возникновения «пост-синхронизации». Это когда двигатель синхронизируется неохотно до подачи напряжения возбуждения. Модуль контролирует скорость вращения ротора и напряжение возбуждения. Когда частота индуцированного напряжения поля равна нулю в течение заданного времени и доступно напряжение возбуждения, напряжение поля прикладывается к полю двигателя. Это действие переводит ротор в правильное положение фазы и синхронизируется.
Испытания двигателей
Синхронные двигатели и генераторы TECO-Westinghouse проходят испытания на соответствие определенным требованиям к рабочим характеристикам. Стандартные коммерческие испытания в соответствии с NEMA MG1, часть 21, включают проверку сопротивления обмотки, механической вибрации, сопротивления изоляции, измерение тока возбуждения (статор и возбудитель), визуальные и механические проверки, повышение температуры подшипников и измерение воздушного зазора. При необходимости процедуры тестирования включают тесты на шум в соответствии с IEEE 85, а также полный тест технических характеристик в соответствии с IEEE 115 для определения эффективности машины, повышения температуры, пусковых характеристик и других характеристик.
При необходимости процедуры тестирования включают тесты на шум в соответствии с IEEE 85, а также полный тест технических характеристик в соответствии с IEEE 115 для определения эффективности машины, повышения температуры, пусковых характеристик и других характеристик.
Щеточное возбуждение
Синхронный двигатель TECO-Westinghouse также доступен с щеточной оснасткой и коллекторными кольцами. Весь узел рассчитан на долгий срок службы и легко доступен для осмотра и текущего обслуживания. Кольца коллектора, изготовленные из стали или других подходящих материалов, насаживаются на стальную оправку поверх изоляционной втулки Micarta. Сборка удерживается на месте на валу двигателя за счет плотной прессовой посадки. Для обеспечения постоянной концентричности поверхности колец коллектора обрабатываются и полируются после сборки на валу ротора. Щеточная оснастка состоит из литых латунных щеткодержателей, установленных на изолированных стальных стержнях, которые опираются на опорную стойку. Количество щеток определенного размера и номинала зависит от тока возбуждения, и поставляется достаточное количество щеток, чтобы ограничить плотность тока до низкого значения для бесперебойной работы. Щетки относятся к электрографическому типу и специально подбираются для каждого применения.
Количество щеток определенного размера и номинала зависит от тока возбуждения, и поставляется достаточное количество щеток, чтобы ограничить плотность тока до низкого значения для бесперебойной работы. Щетки относятся к электрографическому типу и специально подбираются для каждого применения.
Ссылка для загрузки страницы
Перейти к началу
404 — СТРАНИЦА НЕ НАЙДЕНА
Почему я вижу эту страницу?
404 означает, что файл не найден. Если вы уже загрузили файл, имя может быть написано с ошибкой или файл находится в другой папке.
Другие возможные причины
Вы можете получить ошибку 404 для изображений, поскольку у вас включена защита от горячих ссылок, а домен отсутствует в списке авторизованных доменов.
Если вы перейдете по временному URL-адресу (http://ip/~username/) и получите эту ошибку, возможно, проблема связана с набором правил, хранящимся в файле .htaccess. Вы можете попробовать переименовать этот файл в .htaccess-backup и обновить сайт, чтобы посмотреть, решит ли это проблему.
Также возможно, что вы непреднамеренно удалили корневой каталог документов или вам может потребоваться повторное создание вашей учетной записи. В любом случае, пожалуйста, немедленно свяжитесь с вашим веб-хостингом.
Вы используете WordPress? См. Раздел об ошибках 404 после перехода по ссылке в WordPress.
Как найти правильное написание и папку
Отсутствующие или поврежденные файлы
Когда вы получаете ошибку 404, обязательно проверьте URL-адрес, который вы пытаетесь использовать в своем браузере. Это сообщает серверу, какой ресурс он должен использовать попытка запроса.
http://example.com/example/Example/help.html
В этом примере файл должен находиться в папке public_html/example/Example/
Обратите внимание, что в этом примере важен CaSe . На платформах, которые обеспечивают чувствительность к регистру 9Пример 0680 e и пример E не совпадают.
Для дополнительных доменов файл должен находиться в папке public_html/addondomain. com/example/Example/, а имена чувствительны к регистру.
com/example/Example/, а имена чувствительны к регистру.
Неработающее изображение
Если на вашем сайте отсутствует изображение, вы можете увидеть на своей странице поле с красным размером X , где отсутствует изображение. Щелкните правой кнопкой мыши на X и выберите «Свойства». Свойства сообщат вам путь и имя файла, который не может быть найден.
Это зависит от браузера. Если вы не видите на своей странице поле с красным X , попробуйте щелкнуть правой кнопкой мыши на странице, затем выберите «Просмотр информации о странице» и перейдите на вкладку «Мультимедиа».
http://example.com/cgi-sys/images/banner.PNG
В этом примере файл изображения должен находиться в папке public_html/cgi-sys/images/ пример. На платформах с учетом регистра PNG и png не совпадают.
404 Ошибки после перехода по ссылкам WordPress
При работе с WordPress часто могут возникать ошибки 404 Page Not Found, когда была активирована новая тема или когда были изменены правила перезаписи в файле . htaccess.
htaccess.
Когда вы сталкиваетесь с ошибкой 404 в WordPress, у вас есть два варианта ее исправления.
Вариант 1. Исправьте постоянные ссылки
- Войдите в WordPress.
- В меню навигации слева в WordPress нажмите Настройки > Постоянные ссылки (Обратите внимание на текущую настройку. Если вы используете пользовательскую структуру, скопируйте или сохраните ее где-нибудь.)
- Выберите По умолчанию .
- Нажмите Сохранить настройки .
- Верните настройки к предыдущей конфигурации (до того, как вы выбрали «По умолчанию»). Верните пользовательскую структуру, если она у вас была.
- Нажмите Сохранить настройки .
- Отредактируйте файл на своем компьютере и загрузите его на сервер через FTP
- Использовать режим редактирования программы FTP
- Используйте SSH и текстовый редактор
- Используйте файловый менеджер в cPanel
- Войдите в cPanel.
- В разделе «Файлы» щелкните значок File Manager .
- Установите флажок для Корень документа для и выберите доменное имя, к которому вы хотите получить доступ, в раскрывающемся меню.
- Убедитесь, что установлен флажок Показать скрытые файлы (точечные файлы) «.
- Нажмите Перейти . Файловый менеджер откроется в новой вкладке или окне.
- Найдите файл .htaccess в списке файлов. Возможно, вам придется прокрутить, чтобы найти его.
- Щелкните правой кнопкой мыши файл .
9index.php$ — [L]
RewriteCond %{REQUEST_FILENAME} !-f
RewriteCond %{REQUEST_FILENAME} !-d
RewriteRule . /index.php [L]
# Конец WordPress
Если ваш блог показывает неправильное доменное имя в ссылках, перенаправляет на другой сайт или отсутствуют изображения и стиль, все это обычно связано с одной и той же проблемой: в вашем блоге WordPress настроено неправильное доменное имя.
Как изменить файл .htaccess
Файл .htaccess содержит директивы (инструкции), которые сообщают серверу, как вести себя в определенных сценариях, и напрямую влияют на работу вашего веб-сайта.
Перенаправление и перезапись URL-адресов — это две очень распространенные директивы, которые можно найти в файле .htaccess, и многие скрипты, такие как WordPress, Drupal, Joomla и Magento, добавляют директивы в .htaccess, чтобы эти скрипты могли работать.
Возможно, вам потребуется отредактировать файл .htaccess в какой-то момент по разным причинам. В этом разделе рассказывается, как редактировать файл в cPanel, но не о том, что нужно изменить. статьи и ресурсы для этой информации.)
Существует множество способов редактирования файла .htaccess
Самый простой способ отредактировать файл . htaccess для большинства людей — через диспетчер файлов в cPanel.
htaccess для большинства людей — через диспетчер файлов в cPanel.
Как редактировать файлы .htaccess в файловом менеджере cPanel
Прежде чем что-либо делать, рекомендуется сделать резервную копию вашего веб-сайта, чтобы вы могли вернуться к предыдущей версии, если что-то пойдет не так.
Откройте файловый менеджер
Для редактирования файла .htaccess
