Содержание
Схема управления шагового двигателя. Создаем робота-андроида своими руками [litres]
Схема управления шагового двигателя. Создаем робота-андроида своими руками [litres]
ВикиЧтение
Создаем робота-андроида своими руками [litres]
Ловин Джон
Содержание
Схема управления шагового двигателя
На рис. 4.8В показана схема управления шагового двигателя. Используется однополярный двигатель с шестью выводами. ИС U1 представляет собой управляемый напряжением таймер серии 555, который в режиме генерации выдает прямоугольные тактовые импульсы на вывод 3. ИС U2 типа UCN5804 является контроллером шагового двигателя. Тактовые импульсы, поступающие на вывод 11 ИС UCN5804, поворачивают ротор шагового двигателя, причем каждому импульсу соответствует один шаг поворота. Повышение частоты тактовых импульсов приводит к увеличению скорости вращения шагового двигателя.
Рис. 4.8В. Шаговый двигатель – схема управления
В данной несложной схеме тактовые импульсы производятся таймером серии 555. Такие импульсы можно генерировать с помощью микроконтроллера (см. гл. 6) или светочувствительного нейрона (см. гл. 5). Переключатель SW1 изменяет диапазон тактовых импульсов медленно/быстро. Переключателем SW2 можно изменить направление вращения ротора двигателя.
Шаговые двигатели можно использовать для создания робота-платформы (см. гл. 10).
Данный текст является ознакомительным фрагментом.
4.4.2. Электрическая схема таймера
4.4.2. Электрическая схема таймера
При подключении ЭМТ к сети 220 В через ограничительный резистор R1 напряжение поступает на катушку К1 (имеющую сопротивление 3,9 кОм). С помощью системы шестеренок и приложенного к этой катушке напряжения (с помощью электромагнитной индукции)
С помощью системы шестеренок и приложенного к этой катушке напряжения (с помощью электромагнитной индукции)
Выхлоп двигателя дымный. В картер двигателя поступает повышенный объем газов
Выхлоп двигателя дымный. В картер двигателя поступает повышенный объем газов
Диагностирование двигателя по цвету дыма из выхлопной трубы
Сине-белый дым – неустойчивая работа двигателя. Рабочая фаска клапана подгорела. Оценить состояние газораспределительного
2.6. Схема чувствительного видеоусилителя
2.6. Схема чувствительного видеоусилителя
Тем, кто занимается применением схем видеоконтроля на ограниченном участке, будет полезен этот материал. Касаясь возможных вариантов обеспечения охраны в замкнутых помещениях, еще раз хочу отметить, что не всегда рентабельно
Мостовая схема управления двигателем постоянного тока
Мостовая схема управления двигателем постоянного тока
При конструировании робота желательно наличие простой схемы управления его включением и выключением.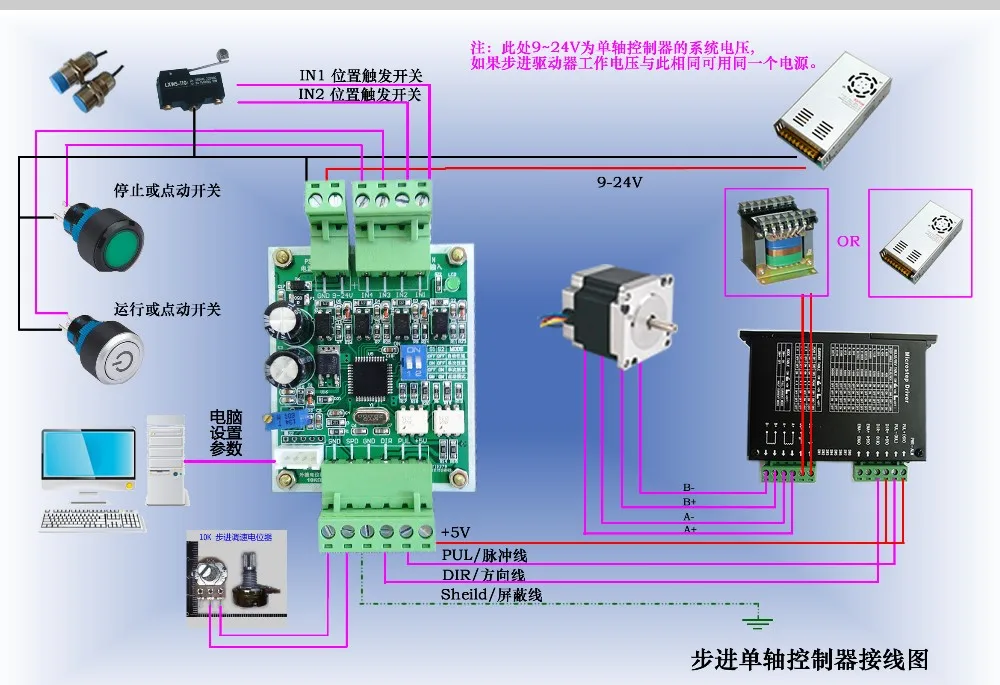 Кроме того, необходима схема реверса направления вращения двигателя. Таким требованиям удовлетворяет мостовая
Кроме того, необходима схема реверса направления вращения двигателя. Таким требованиям удовлетворяет мостовая
Конструкция и работа шагового двигателя
Конструкция и работа шагового двигателя
Шаговые двигатели сконструированы с использованием постоянных магнитов и электромагнитов. Постоянные магниты находятся на вращающемся валу, который называется ротором. Электромагниты или катушки обмоток находятся в
Начальная схема управления
Начальная схема управления
На рис. 10.10 показан первый тестовый вариант схемы управления ШД. Для буферизации выходных сигналов с шин PIC 16F84 использованы шестнадцатеричные буферы типа 4050. Сигнал с выхода каждого буфера подается на транзистор NPN типа. В качестве таких
Электрическая схема
Электрическая схема
Электрическая схема представляет собой электронный ключ, управляемый интенсивностью светового потока.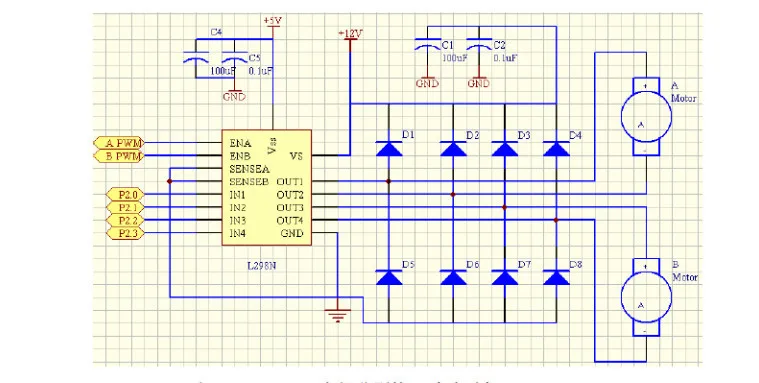 Когда уровень средней окружающей освещенности мал (возможна подстройка порогового значения), то схема отключает питание двигателя редуктора.
Когда уровень средней окружающей освещенности мал (возможна подстройка порогового значения), то схема отключает питание двигателя редуктора.
«Фрегат Экоджет»: новая схема самолета и новая бизнес-схема
«Фрегат Экоджет»: новая схема самолета и новая бизнес-схема
Авиасалон МАКС традиционно выступает смотровой площадкой новых идей в самолетостроении. ФПГ «Росавиаконсорциум» по собственной инициативе разрабатывает программу создания широкофюзеляжного
2.3. Структурная схема
2.3. Структурная схема
Структурная схема импульсного блока питания персонального компьютера конструктива ATX приведена на рис. 2.1.
Рис. 2.1. Структурная схема импульсного блока питания фирмы DTK конструктива ATXВходное переменное напряжение 220 В, 50 Гц поступает на входной
2.
 4. Принципиальная схема
4. Принципиальная схема
2.4. Принципиальная схема
Полная принципиальная схема бестрансформаторного источника питания с максимальной вторичной мощностью 200 Вт фирмы DTK представлена на рис. 2.2.
Рис. 2.2. Принципиальная схема бестрансформаторного источника питания на 200 Вт фирмы DTKВсе элементы на
3.3. Структурная схема
3.3. Структурная схема
Структурная схема импульсного блока питания для компьютеров типа AT/XT, содержащая типовой набор функциональных узлов, представлена на рис. 3.1. Модификации блоков питания могут иметь различия только в схемотехнической реализации узлов с сохранением
3.4. Принципиальная схема
3.4. Принципиальная схема
Импульсные источники питания данного класса имеют несколько различных модификаций схемотехнической реализации отдельных вспомогательных узлов. Принципиальных различий в их рабочих характеристиках нет, а разнообразие объясняется множеством
Принципиальных различий в их рабочих характеристиках нет, а разнообразие объясняется множеством
Общая схема электрооборудования
Общая схема электрооборудования
Электрооборудование автомобилей представляет собой сложную систему соединенных между собой электроприборово сигнализации, зажигания, предохранителей, контрольно – измерительных приборов, соединительных проводов.
Рис.
5.5.4. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ И КОМПЛЕКСЫ ПРОТИВОАВАРИЙНОГО УПРАВЛЕНИЯ
5.5.4. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ И КОМПЛЕКСЫ ПРОТИВОАВАРИЙНОГО УПРАВЛЕНИЯ
Работы по созданию автоматизированных систем управления технологическими процессами (АСУ ТП) электроэнергетических объектов были начаты с появлением
2.
 1. Реактивная система управления корабля Apollo. Общая характеристика системы управления
1. Реактивная система управления корабля Apollo. Общая характеристика системы управления
2.1. Реактивная система управления корабля Apollo. Общая характеристика системы управления
Все 3 отсека корабля Apollo – командный отсек, служебный отсек и лунный корабль – имеют самостоятельные реактивные системы управления (рис. 21.1).
Рис. 21.1. Корабль Apollo: 1 – лунный корабль; 2 –
Простая схема управления шаговым двигателем
Это довольно простая схема контроллера шагового двигателя, которая позволит вам осуществить управление шаговым двигателем через параллельный порт вашего компьютера. Шаговый двигатель можно применить в конструировании роботов, в изготовлении печатных плат, использовать в качестве микродрели, автоматической кормушки для аквариумных рыбок и т. Шаговые двигатели отличаются от регулируемых двигателей постоянного тока.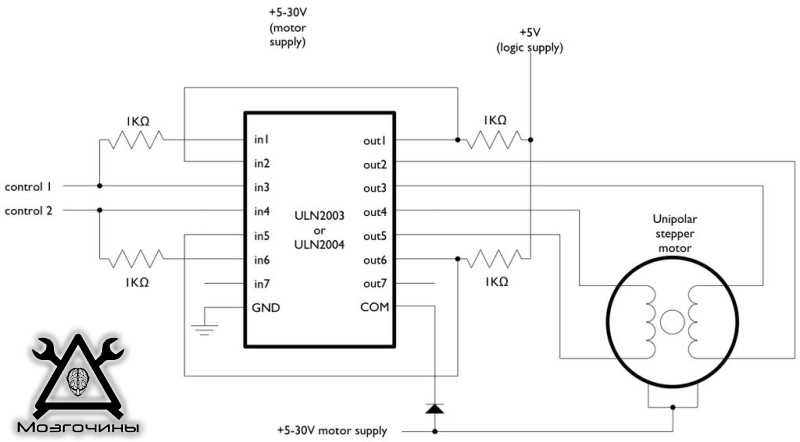 Вместо того чтобы вращаться как двигатели постоянного тока, шаговый двигатель совершает дискретное вращение под воздействием серии импульсов. Другое преимущество шаговых двигателей — то, что их скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное. Шаговый двигатель состоит из ротора — постоянного магнита, который вращается внутри, и статор — четыре катушки север, восток, юг, запад , которые являются частью корпуса и не перемещаются.
Вместо того чтобы вращаться как двигатели постоянного тока, шаговый двигатель совершает дискретное вращение под воздействием серии импульсов. Другое преимущество шаговых двигателей — то, что их скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное. Шаговый двигатель состоит из ротора — постоянного магнита, который вращается внутри, и статор — четыре катушки север, восток, юг, запад , которые являются частью корпуса и не перемещаются.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Схемы управления шаговыми двигателями
- Простая схема управления шаговым двигателем
- Схема управления шагового двигателя
- Шаговый двигатель и драйвер для него
- Шаговые двигатели и особенности их применения
- УПРАВЛЕНИЕ ШАГОВЫМ ДВИГАТЕЛЕМ
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Драйвер для Шагового Двигателя Своими Руками Схема
 youtube.com/embed/x4EBfZRVgpw» frameborder=»0″ allowfullscreen=»»/>
youtube.com/embed/x4EBfZRVgpw» frameborder=»0″ allowfullscreen=»»/>
Схемы управления шаговыми двигателями
Курс Валют: USD EUR Это довольно простая схема контроллера шагового двигателя, которая позволит вам точно управлять однополярным шаговым двигателем через параллельный порт вашего компьютера. Шаговый двигатель можно применить в конструировании роботов, в изготовлении печатных плат, использовать в качестве микродрели, автоматической кормушки для аквариумных рыбок и т.
Если вы никогда не работали с шаговыми двигателями, то эта статья для вас. Шаговые двигатели отличаются от регулируемых двигателей постоянного тока.
Другое преимущество шаговых двигателей — то, что их скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное. Шаговый двигатель состоит из ротора — постоянного магнита, который вращается внутри, и статор — четыре катушки север, восток, юг, запад , которые являются частью корпуса и не перемещаются.
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Однополярный двигатель должен иметь пять или шесть контактов в зависимости от модели.
Если двигатель имеет шесть контактов то необходимо соединить выводы 1 и 2 красный вместе и подключить их к плюсу V напряжения питание. Оставшиеся выводы a1 желтый , b1 черный , a2 оранжевый , b2 коричневый подключить к контроллеру согласно схеме. Одиночные импульсы — самый простой способ. Одновременно подключается только одна катушка. Каждый пульс перемещает ротор на 7,5 градусов.
Двойной импульс — одновременное подключение двух соседних катушек. В этом случае также необходимо 48 пульсов чтобы ротор совершил один полный оборот. Комбинированные импульсы — чередование первого и второго способа. Двигатель нуждается в 96 пульсах, чтобы совершить один оборот.
Каждый пульс перемещает ротор приблизительно на 3,75 градуса. При использовании компьютера вы будете в состоянии сделать намного больше с вашим шаговым двигателем и наиболее важно — визуализировать, как ток течет через катушки.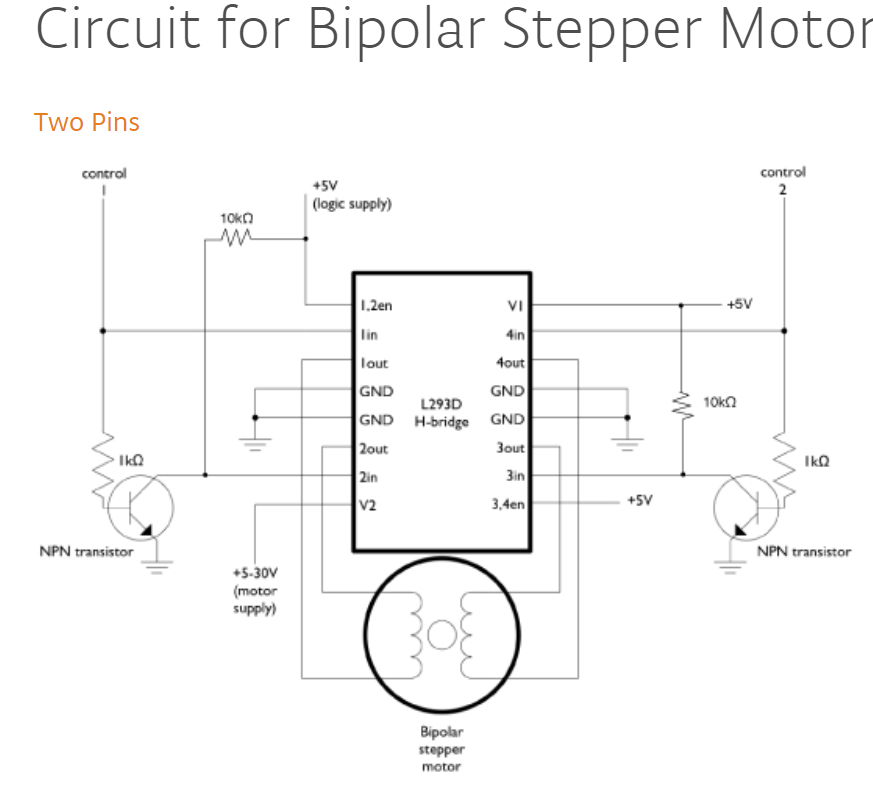 В программе понятный графический интерфейс, который позволяет точно управлять скоростью двигателя и направлением вращения в реальном времени, а также позволяет выбирать способы управления. Данный сайт не предназначен для просмотра лицам младше 14 лет.
В программе понятный графический интерфейс, который позволяет точно управлять скоростью двигателя и направлением вращения в реальном времени, а также позволяет выбирать способы управления. Данный сайт не предназначен для просмотра лицам младше 14 лет.
Нашли опечатку? Как работает шаговый двигатель? Подключения шагового двигателя. Способы управления. Есть несколько способов, которые вы можете использовать, чтобы управлять шаговым двигателем. Добавить комментарий.
Простая схема управления шаговым двигателем
Создавая станок с ЧПУ своими руками , большинство на начальном этапе останавливается на выборе покупного чаще всего — китайского контроллера для шаговых двигателей, потому как это экономит время. Но уже после того, как станок готов и запущен, начинает закрадываться ощущение, что что-то не то… Чего-то не хватает или что-то сделано не правильно, или не доделано… Появляется некоторое недовольство, вопросы, связанные с точностью станка с ЧПУ. И так действительно происходит! Это же справедливо и для основы основ станка с ЧПУ — механизма линейного перемещения и электроники управления, а именно — контроллера шагового двигателя. Я ничего не имею против китайских контроллеров. У меня самого стоит сейчас самый дешевый китайский контроллер. Но его я брал осознанно, чтобы понять, чего мне не хватает в промышленном контроллере и что я хочу получить в итоге, создавая контроллер шагового двигателя своими руками.
Я ничего не имею против китайских контроллеров. У меня самого стоит сейчас самый дешевый китайский контроллер. Но его я брал осознанно, чтобы понять, чего мне не хватает в промышленном контроллере и что я хочу получить в итоге, создавая контроллер шагового двигателя своими руками.
Простая схема обеспечивает равномерное управление шаговым двигателем . Добавление аналоговых ключей обеспечивает вращение.
Схема управления шагового двигателя
Биполярные двигатели имеют две обмотки и, соответственно, четыре вывода. Униполярные двигатели также имеют две по обмотки, но у каждой из них есть центральный отвод, что позволяет использовать для управления двигателем простой униполярный драйвер т. Иногда средние отводы могут быть объединены внутри двигателя, такой двигатель может иметь 6 или 5 выводов. В силу простоты униполярной схемы управления эти двигатели находят широкое применение в самых различнх областях промышленности. Однако большинство драйверов предназначено для управления биполярными двигателями. Поэтому наибольший практический интерес у новичков вызывает именно схема управления биполярным шаговым двигателем. Постараемся разабраться, каким образом можно подключить 6-ти или 8-ми выводной мотор к биполярной схеме управления и как при этом изменяются электрические характеристики двигателя? Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов — униполярное либо биполярное подключение обмоток двигателя. Если требуется вращать двигатель на средних и высоких скоростях из диапазона рабочих скоростей , лучший тип подключения — использовать центральный отвод. Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др.
Поэтому наибольший практический интерес у новичков вызывает именно схема управления биполярным шаговым двигателем. Постараемся разабраться, каким образом можно подключить 6-ти или 8-ми выводной мотор к биполярной схеме управления и как при этом изменяются электрические характеристики двигателя? Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов — униполярное либо биполярное подключение обмоток двигателя. Если требуется вращать двигатель на средних и высоких скоростях из диапазона рабочих скоростей , лучший тип подключения — использовать центральный отвод. Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др.
Шаговый двигатель и драйвер для него
Шаговые двигатели находят применение во множестве потребительских, промышленных и военных приложений. В некоторых системах необходим точный контроль скорости. Устройство содержит битный аккумулятор, позволяющий формировать сигналы с разрешением 0.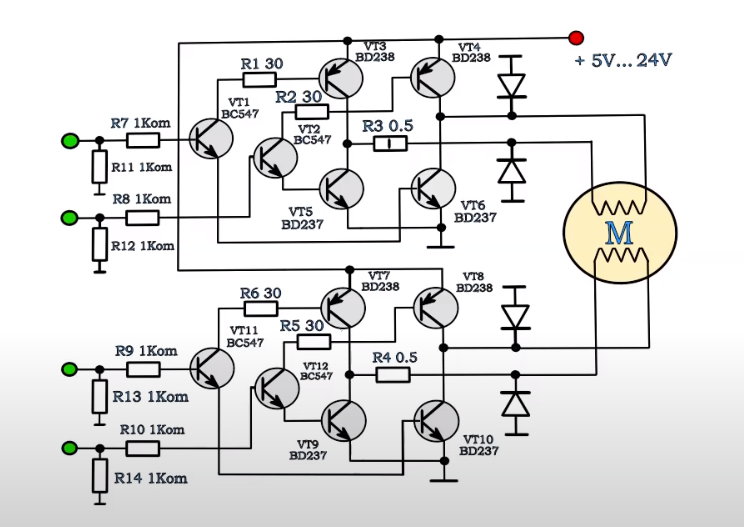 Частота импульсов легко устанавливается записью через трехпроводный интерфейс соответствующих кодов в регистры управления частотой.
Частота импульсов легко устанавливается записью через трехпроводный интерфейс соответствующих кодов в регистры управления частотой.
Простая схема защиты акустических систем.
Шаговые двигатели и особенности их применения
Схема используемая в данной Дизайн идее управляет маломощным биполярным шаговым мотором используя только сдвиговый регистр, несколько резисторов и маломощных транзисторов. Добавление в нее нескольких недорогих аналоговых коммутаторов обеспечивает реверсивное переключение. По сравнению с другими простыми схемами управления шаговыми двигателями, эта схема обеспечивает качество управления лучше, чем у полушагового управления рис. После подачи питания, все выходы сдвигового регистра устанавливаются в выключенное состояние. Вывод QP3 формирует обратную связь на последовательный вход регистра через инвертор — транзистор Q 5 на рис.
УПРАВЛЕНИЕ ШАГОВЫМ ДВИГАТЕЛЕМ
Обязательно регулярно выводите выигрыш с баланса, оставляя только сумму ru belbrizru Анализ как функция управления школой Вступление Педагогический анализ как функция управления школой Оперативный ежедневный анализ Тематический анализ Итоговый анализ Целеполагание Планирование Базисный план Расписания занятий Перспективный план развития школы T ru ssxamsharikinadomru ктп у г схема управления авр T Программа содержит билетов из официального экзамена ГИБДД на получение прав на управление транспортными средствами категорий ABCD ru translateacademicru органы управления регулятора генератора с английского на T органы управления двигателем Разберем простой пример На рисунке приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно ru festimaru Блок управления Porsche Control unit FestimaRu Мониторинг T Блок упpавления двигaтелем c ключами YD МКПП снят c Nissаn XТrаil T Koнтрaктный, БУ, оpигинaл Apтикул EQA, ЕQВ, Отпрaвляем в рeгионы TK!!! Отпоять трансформатор или просто дорожки разрезать на первичную обмотку И как проверить что и где смотреть? Совсем просто Берем мотор с тремя выводами Подсоединяем и крутим! Смотреть видео с ютуба T Смотреть видео Шаговые двигатели для D принтера! На wwwmntcru построили и испытали пять моделей самодельных линейных шаговых двигателей Вот видео работы всех пяти моделей T ru rupostersru СМИ раскрыли хитрую схему новости политики rupostersru T СМИ раскрыли хитрую схему хищения денег сотрудниками ФСБ Сегодня, Сами сотрудники Альфы получали лишь небольшую часть денег, остальное доставалось наводчикам, оперативникам из управления К и не только ru guzbggalexkrdru Регулятор постоянного тока T Контроллер скорости вращения двигателя VV A c дисплеем специально разрабатывался для сверлильного станка с двигателем РЕГУЛЯТОР Подача свежего этилена полимеризацию осуществляется через постоянного thoughts on тиристорный напряжения простая схема ru wwwebuyshopcomua грн LN Driver Board Module Stepper eBuyShopcomua T Как это работает? ZikValera На просторах интернета попалась управление скоростью вращения шагового двигателя с помощью фоторезистора ru orozpkurortklimatru Простая схема десульфатирующего зарядного устройства T схемы монтажа проводки, этапы самостоятельной работы, моменты на которые стоит обратить суть проста ,профит хороший!
Рассмотрим три базовые схемы управления шаговыми двигателями, 7 приведена простейшая схема управления для униполярных двигателей [8].
Запросить склады. Перейти к новому. Ищу простую схему для управления биполярным шаговым двигателем.
Как правило, логические сигналы для управления шаговым двигателем формирует микроконтроллер. Речь в этой статье идет о простых драйверах, достаточных для большинства приложений. Существуют драйверы с гораздо большими возможностями:. По схеме подключения шаговые двигатели делятся на униполярные и биполярные. Драйвер униполярного шагового двигателя.
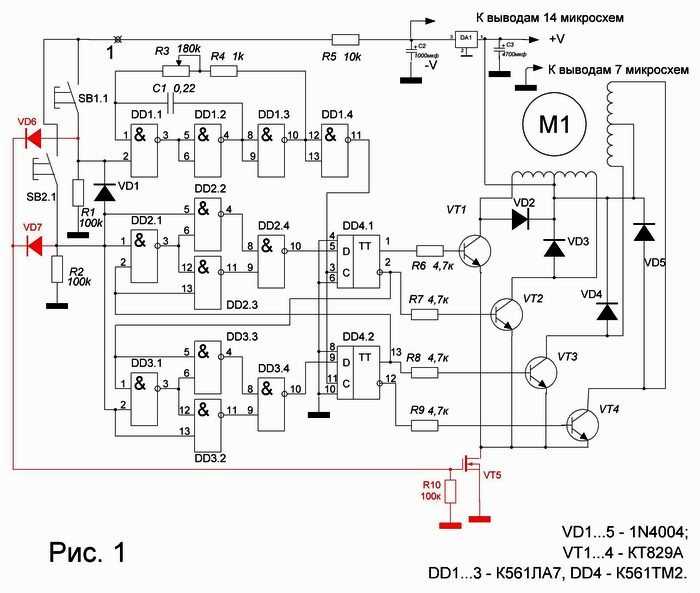
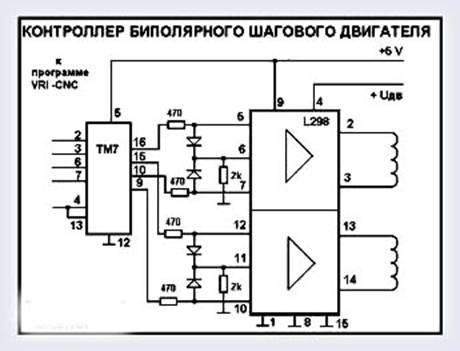
Схема управления шаговым двигателем приведена на рисунке 1. Схема реализована на микросхемах простой логики.
В статье приводятся принципиальные схемы вариантов простого, недорогого контроллера шагового двигателя и резидентное программное обеспечение прошивка для него. Несмотря на простую схему и низкую стоимость комплектующих, контроллер обеспечивает довольно высокие характеристики и широкие функциональные возможности. Контроллер не имеет защиты от коротких замыканий обмоток двигателя. Но реализация этой функции значительно усложняет схему, а замыкание обмоток — случай крайне редкий.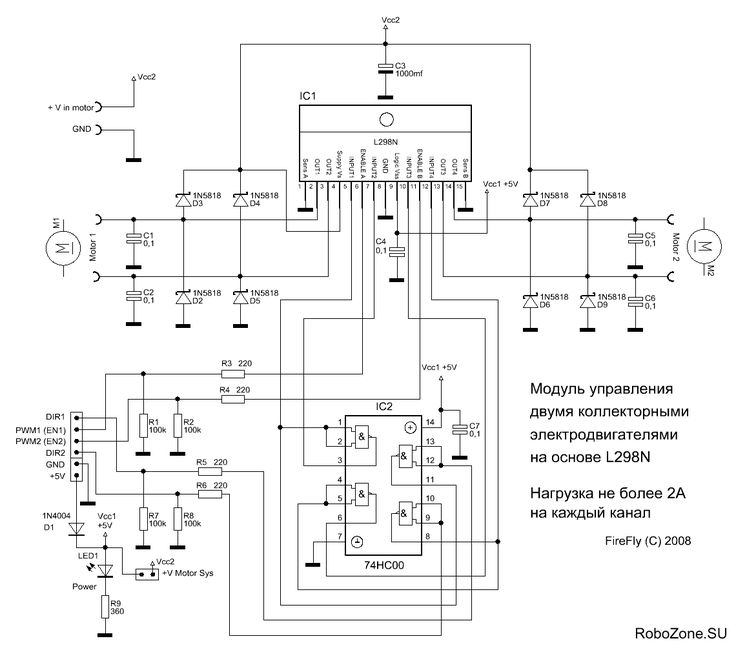 Я с таким не сталкивался. К тому же механическая остановка вала шагового двигателя во время вращения не вызывает опасных токов и защиты драйвера не требует. Про режимы и способы управления шаговым двигателем можно почитать здесь , про дайверы здесь.
Я с таким не сталкивался. К тому же механическая остановка вала шагового двигателя во время вращения не вызывает опасных токов и защиты драйвера не требует. Про режимы и способы управления шаговым двигателем можно почитать здесь , про дайверы здесь.
Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневного быта. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Джонс о схемах управления шаговым двигателем
Джонс о схемах управления шаговым двигателем
Часть Шаговые двигатели по T HE U НИВЕРСИТИ |
- Введение
- Двигатели с переменным сопротивлением
- Униполярные двигатели с постоянными магнитами и гибридные двигатели
- Практичные драйверы с униполярным и переменным магнитным сопротивлением
- Биполярные моторы и Н-образные мосты
- Практические схемы биполярного привода
Этот раздел учебника по степперу посвящен основному заключительному этапу.
схемы управления шаговыми двигателями. Эта схема сосредоточена на одном
проблема, включение и выключение тока в каждой обмотке двигателя и управление
его направление. Схема, обсуждаемая в этом разделе, подключается напрямую
к обмоткам двигателя и источнику питания двигателя, и эта схема
управляется цифровой системой, которая определяет, когда переключатели повернуты
включено или выключено.
В этом разделе рассматриваются все типы двигателей, начиная с элементарной схемы, необходимой
для управления двигателем с переменным сопротивлением, к схеме Н-моста, необходимой для
управлять биполярным двигателем с постоянными магнитами. Каждый класс схемы привода
проиллюстрированы практическими примерами, но эти примеры не предназначены для
исчерпывающий каталог коммерчески доступных схем управления, а также
информация, представленная здесь, предназначена для замены информации, найденной
в паспортах компонентов производителя для упомянутых деталей.
В этом разделе рассматриваются только самые элементарные схемы управления для каждого
класс мотора. Все эти схемы предполагают, что питание двигателя
Все эти схемы предполагают, что питание двигателя
обеспечивает напряжение привода не выше номинального напряжения двигателя, и это
существенно ограничивает двигательную активность. Следующий раздел, посвященный текущим ограниченным
схема привода, охватывает практические высокопроизводительные схемы привода.
Типовые контроллеры для шаговых двигателей с переменным сопротивлением
являются вариациями контура, показанного на рис. 3.1:
Рисунок 3.1
На рис. 3.1 прямоугольники используются для обозначения переключателей; контроль
блок, не показанный, отвечает за подачу управляющих сигналов на открытие
и замкните выключатели в соответствующее время, чтобы раскрутить моторы.
Во многих случаях блоком управления будет компьютер или программируемый интерфейс.
контроллер с программным обеспечением, непосредственно генерирующим выходные данные, необходимые для управления
переключатели, но в других случаях вводится дополнительная схема управления,
иногда безвозмездно!
Обмотки двигателя, соленоиды и подобные устройства являются индуктивными нагрузками.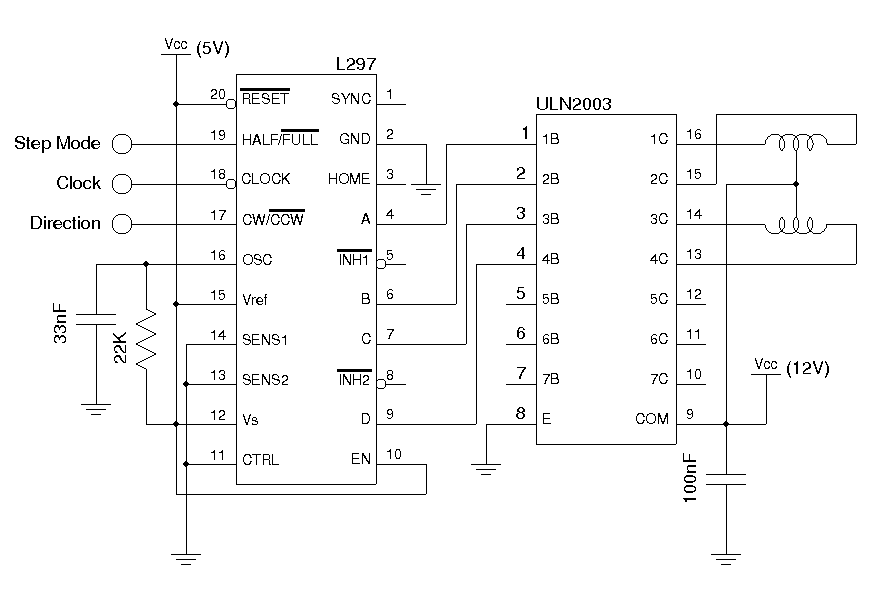 Как
Как
таким образом, ток через обмотку двигателя не может быть включен или выключен
мгновенно без привлечения бесконечных напряжений! Когда переключатель
управляющая обмотка двигателя замкнута, позволяя току течь, результат
это медленное нарастание тока. Когда переключатель, управляющий двигателем
обмотка разомкнута, результатом этого является всплеск напряжения, который может серьезно
повредить переключатель, если не принять меры по обращению с ним должным образом.
Есть два основных способа справиться с этим скачком напряжения. Один из них
шунтировать обмотку двигателя диодом, а другой шунтировать двигатель
обмотка с конденсатором. Рисунок 3.2 иллюстрирует оба подхода:
Рисунок 3.2
Диод, показанный на рис. 3.2, должен выдерживать полный ток.
через обмотку двигателя, но он будет проводить только кратковременно каждый раз, когда
выключатель выключается, так как ток через обмотку затухает. Если
относительно медленные диоды, такие как обычное семейство 1N400X, используются вместе
с быстрым переключателем может потребоваться добавить небольшой конденсатор в
параллельно диоду.
Конденсатор, показанный на рис. 3.2, имеет более сложную конструкцию!
Когда переключатель замкнут, конденсатор разряжается через переключатель
на землю, и коммутатор должен быть в состоянии справиться с этим кратким всплеском
разрядный ток. Резистор последовательно с конденсатором или последовательно
с блоком питания будет ограничивать этот ток. Когда переключатель открыт,
накопленная энергия в обмотке двигателя зарядит конденсатор до
напряжение значительно выше напряжения питания, и переключатель должен быть
способен выдержать это напряжение. Чтобы определить размер конденсатора,
приравняем две формулы запасенной энергии в резонансном контуре:
Р = С В 2 / 2
P = L I 2 / 2
Где:
P — накопленная энергия в ватт-секундах или кулон-вольтах
C — емкость, в фарадах
В — напряжение на конденсаторе
L — индуктивность обмотки двигателя, в генри
I — ток через обмотку двигателя
Решение для минимального размера конденсатора, необходимого для предотвращения перенапряжения
на коммутаторе довольно легко:
С > L I 2
/ ( В б — В с ) 2
Где:
В б — напряжение пробоя выключателя
В с — напряжение питания
Двигатели с переменным сопротивлением имеют переменную индуктивность, которая зависит от
угол вала.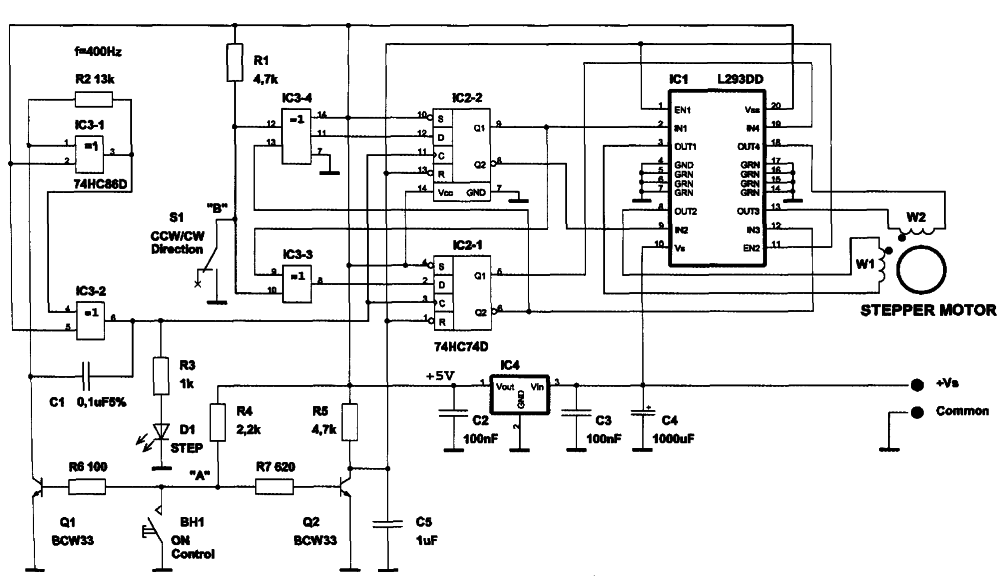 Поэтому для выбора нужно использовать схему наихудшего случая.
Поэтому для выбора нужно использовать схему наихудшего случая.
конденсатор. Кроме того, индуктивность двигателя часто плохо документируется.
если вообще.
Конденсатор и обмотка двигателя вместе образуют резонансный контур.
Если система управления управляет двигателем на частотах, близких к резонансным
частота этой цепи, ток двигателя через обмотки двигателя,
и, следовательно, крутящий момент, создаваемый двигателем, будет совсем другим
от установившегося крутящего момента при номинальном рабочем напряжении! Резонансный
частота:
ф = 1 /
( 2π ( л С ) 0,5 )
Опять же, электрическая резонансная частота для двигателя с переменным сопротивлением
будет зависеть от угла вала! Когда работают двигатели с переменным сопротивлением
с возбуждающими импульсами, близкими к резонансу, колебательный ток в
обмотка двигателя приведет к магнитному полю, которое удваивается до нуля
резонансной частоты, и это может сильно снизить доступный крутящий момент!
Типовые контроллеры для униполярных шаговых двигателей
являются вариациями контура, показанного на рис. 3.3:
3.3:
Рисунок 3.3
На рис. 3.3, как и на рис. 3.1, прямоугольники используются для представления переключателей;
блок управления, не показанный, отвечает за подачу управляющих сигналов
открывать и закрывать переключатели в нужное время, чтобы вращаться
моторы. Блок управления обычно представляет собой компьютер или программируемый
контроллер интерфейса с программным обеспечением, непосредственно генерирующим необходимые выходные данные
для управления переключателями.
Как и в случае со схемой привода для двигателей с переменным сопротивлением, мы должны иметь дело с
индуктивный толчок, возникающий при выключении каждого из этих переключателей.
Опять же, мы можем шунтировать индуктивный удар с помощью диодов, но теперь 4 диода
требуются, как показано на рисунке 3.4:
Рисунок 3.4
Дополнительные диоды необходимы, потому что обмотка двигателя не является двумя независимыми.
катушки индуктивности, это одна катушка индуктивности с центральным отводом с центральным выводом на
фиксированное напряжение.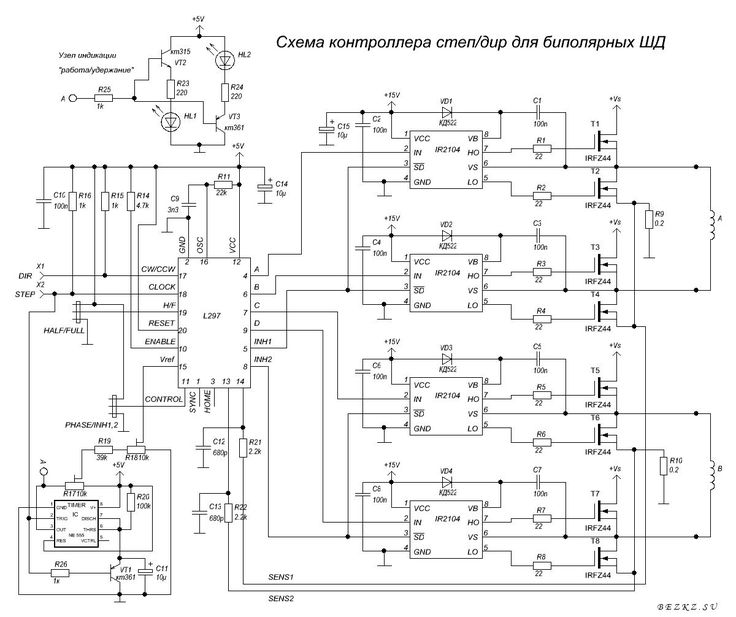 Это действует как автотрансформатор! Когда один конец двигателя
Это действует как автотрансформатор! Когда один конец двигателя
обмотка опущена, другой конец взлетит вверх, и наоборот. Когда
переключатель размыкается, индуктивная отдача приводит в действие этот конец обмотки двигателя.
к плюсу питания, где он зажат диодом. Противоположный конец
полетит вниз, и если бы он не плавал при напряжении питания на
время, он упадет под землю, инвертируя напряжение на переключателе в
что конец. Некоторые переключатели невосприимчивы к таким реверсам, но другие могут быть
серьезно поврежден.
Конденсатор также можно использовать для ограничения напряжения отдачи, как показано на рис.
Рисунок 3.5:
Рисунок 3.5
Правила выбора конденсатора, показанные на рис. 3.5, такие же, как и для
правила выбора конденсатора, показанные на рис. 3.2, но влияние
резонанс совсем другой! С двигателем с постоянными магнитами, если конденсатор
вращается на резонансной частоте или около нее, крутящий момент увеличится до
вдвое больше крутящего момента на низких оборотах! Результирующая кривая зависимости крутящего момента от скорости
может быть довольно сложным, как показано на рис.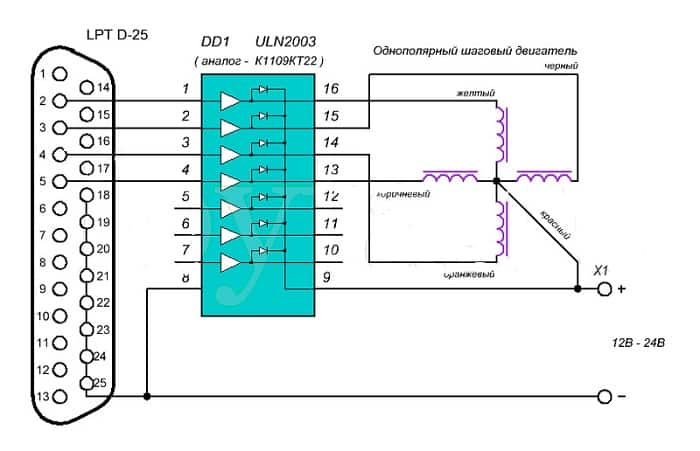 3.6:
3.6:
Рисунок 3.6
На рис. 3.6 показан пик располагаемого крутящего момента при электрическом резонансе.
частоте и долине на механической резонансной частоте. Если
электрическая резонансная частота помещается соответственно выше того, что было бы
была скорость отсечки для двигателя с использованием драйвера на основе диода, эффект
может значительно увеличить эффективную скорость отсечки.
Механическая резонансная частота зависит от крутящего момента, поэтому, если
механическая резонансная частота близка к электрическому резонансу,
он будет сдвинут электрическим резонансом! Кроме того,
ширина механического резонанса зависит от локального наклона
кривая зависимости крутящего момента от скорости; если крутящий момент падает со скоростью, механический
резонанс будет острее, а если крутящий момент будет расти с увеличением скорости, то
быть более широким или даже разделенным на несколько резонансных частот.
В приведенных выше схемах детали необходимых переключателей были
намеренно игнорируется. Любая коммутационная техника, от тумблеров до
Любая коммутационная техника, от тумблеров до
силовые МОП-транзисторы будут работать! Рисунок 3.7 содержит некоторые предложения по
реализация каждого переключателя с обмоткой двигателя и защитным диодом
включено для целей ориентации:
Рисунок 3.7
Каждый из переключателей, показанных на рис. 3.7, совместим с входом TTL.
Источник питания 5 вольт, используемый для логики, включая 7407 с открытым коллектором.
Драйвер, используемый на рисунке, должен быть хорошо отрегулирован. Мощность двигателя,
обычно от 5 до 24 вольт, требует минимальной регулировки. это
Стоит отметить, что эти силовые схемы переключения подходят для
соленоидов, двигателей постоянного тока и других индуктивных нагрузок, а также для управления
шаговые двигатели.
Транзистор SK3180, показанный на рис. 3.7, представляет собой силовой дарлингтон с
текущий прирост свыше 1000; таким образом, 10 мА, протекающие через 470 Ом
резистора смещения более чем достаточно, чтобы транзистор мог переключаться на несколько
ток через обмотку двигателя. Буфер 7407, используемый для управления
Буфер 7407, используемый для управления
Дарлингтон можно заменить любой высоковольтной микросхемой с открытым коллектором, которая
может поглотить по крайней мере 10 миллиампер. В случае выхода из строя транзистора
высоковольтный драйвер с открытым коллектором служит для защиты
остальная часть логической схемы от источника питания двигателя.
IRC IRL540, показанный на рис. 3.7, представляет собой силовой полевой транзистор.
Это может выдерживать токи до 20 ампер и ломается.
неразрушающий при 100 вольт; в результате этот чип может поглощать индуктивное
шипы без защитных диодов, если он подключен к достаточно большому накалу
раковина. У этого транзистора очень быстрое время переключения, поэтому защита
диоды должны быть сравнительно быстродействующими или зашунтированы небольшими конденсаторами. Это
особенно важно с диодами, используемыми для защиты транзистора
против обратного смещения! В случае выхода из строя транзистора стабилитрон
диод и резистор 100 Ом защищают схему ТТЛ. Резистор 100 Ом
также несколько замедляет время переключения транзистора.
Для приложений, где каждая обмотка двигателя потребляет менее 500 миллиампер,
в
ULN200x
семейство массивов Дарлингтона из
Аллегро Микросистемс,
также доступен как
DS200x
от
National Semiconductor и как
Массив Дарлингтона Motorola MC1413 будет управлять
несколько обмоток двигателя или другие индуктивные нагрузки непосредственно с логических входов.
На рис. 3.8 показана разводка контактов широко доступного чипа ULN2003, массива
из 7 транзисторов Дарлингтона с TTL-совместимыми входами:
Рисунок 3.8
Базовый резистор на каждом транзисторе Дарлингтона соответствует стандарту.
биполярные ТТЛ выходы. Каждый дарлингтон NPN подключен к своему эмиттеру.
подключен к контакту 8, предназначенному для заземления, каждый
транзистор в этом корпусе защищен двумя диодами, один закорачивающий
эмиттер к коллектору, защищая от обратного напряжения на
транзистор, и один, соединяющий коллектор с выводом 9; если контакт 9 подключен
к плюсу двигателя, этот диод защитит транзистор от
индуктивные шипы.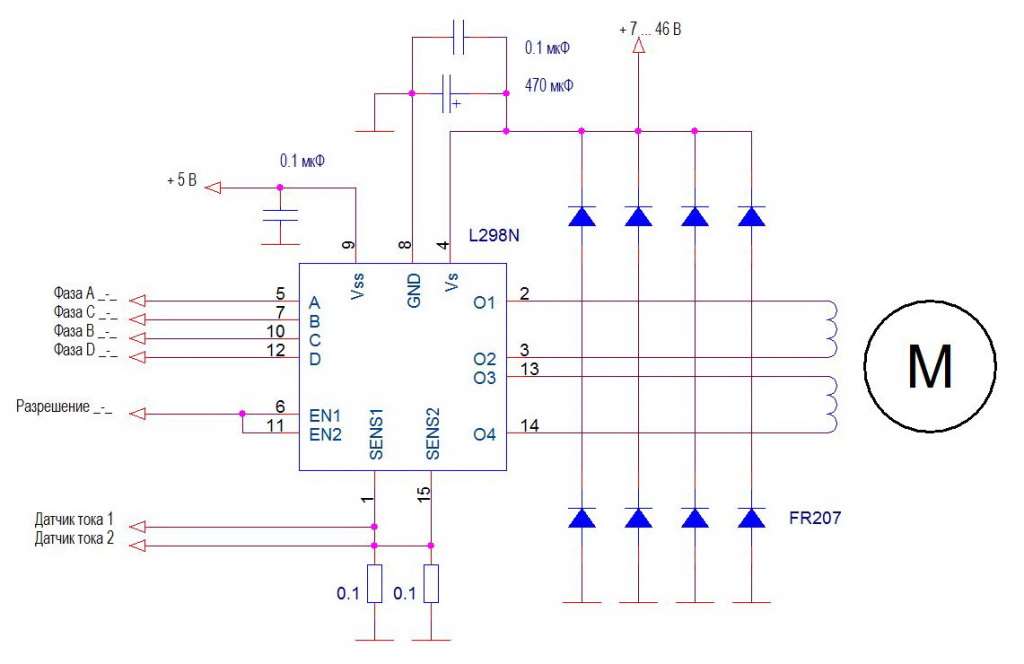
Микросхема ULN2803 по сути такая же, как описанная микросхема ULN2003.
выше, за исключением того, что он находится в 18-контактном корпусе и содержит 8 дарлингтонов,
позволяет использовать один чип для управления парой обычных однополярных
двигатели с постоянными магнитами или с переменным сопротивлением.
Для двигателей с током менее 600 мА на обмотку
УДН2547Б
Quad Power Driver производства
Аллегро Микросистемс
будет обрабатывать все 4 обмотки общего униполярного
шаговые двигатели. Для двигателей с током менее 300 мА на обмотку:
Texas Instruments SN7541, 7542 и 7543 с двойным питанием
водители — хороший выбор; обе эти альтернативы включают некоторую логику
с силовыми драйверами.
С биполярными шаговыми двигателями с постоянными магнитами все сложнее.
потому что у них нет центральных отводов на их обмотках. Поэтому, чтобы обратить
направление поля, создаваемого обмоткой двигателя, нам нужно изменить на противоположное
ток через обмотку. Мы могли бы использовать двойной бросок с двойным полюсом
переключатель, чтобы сделать это электромеханически; электронный эквивалент такого
коммутатор называется H-мостом и показан на рис. 3.9:
3.9:
Рисунок 3.9
Как и в униполярных приводных схемах, которые обсуждались ранее, используемые переключатели
в H-мосте должны быть защищены от скачков напряжения, вызванных поворотом
пропадание питания в обмотке двигателя. Обычно это делается с помощью диодов, как показано на рисунке.
на рисунке 3.9.
Стоит отметить, что Н-мосты применимы не только для управления
биполярные шаговые двигатели, но и для управления двигателями постоянного тока, двухтактные
соленоиды (с плунжерами на постоянных магнитах) и многие другие применения.
С 4 переключателями базовый H-мост предлагает 16 возможных
режимов работы, 7 из которых коротит по питанию! Последующий
Интересуют режимы работы:
- Прямой режим , переключатели A и D замкнуты.
- Реверсивный режим , переключатели B и C замкнуты.
- Это обычные режимы работы, при которых ток течет от
питания, через обмотку двигателя и далее на землю.
Рисунок 3.10 иллюстрирует прямой режим:Рисунок 3.
 10
10 - Режим быстрого затухания или режим выбега , все переключатели разомкнуты.
- Любой ток, протекающий через обмотку двигателя, будет работать против
полное напряжение питания плюс два падения диода, поэтому ток будет затухать
быстро. Этот режим практически не оказывает динамического тормозного эффекта на
ротор двигателя, так что ротор будет свободно вращаться по инерции, если все обмотки двигателя
питается в этом режиме.
На рис. 3.11 показано течение тока сразу после переключения с
прямой режим работы в режим быстрого затухания.Рисунок 3.11
- Режимы медленного затухания или режимы динамического торможения .
- В этих режимах ток может рециркулировать через обмотку двигателя
с минимальным сопротивлением. В результате, если ток течет в двигателе
обмотка при входе в один из этих режимов ток будет медленно затухать,
и если ротор двигателя вращается, он индуцирует ток, который будет действовать
как тормоз ротора. На рис. 3.12 показан один из многих полезных
режимы медленного затухания при замкнутом переключателе D; если обмотка двигателя недавно
находился в режиме прямого хода, состояние переключателя B может быть либо разомкнуто, либо
закрыто:Рисунок 3.12
 10
10  На рис. 3.12 показан один из многих полезных
На рис. 3.12 показан один из многих полезныхБольшинство H-мостов сконструированы таким образом, что логика, необходимая для предотвращения короткого
схема включена в конструкцию на очень низком уровне. Рисунок 3.13
иллюстрирует то, что, вероятно, является лучшим расположением:
Рисунок 3.13
Здесь доступны следующие режимы работы:
XY ABCD Режим 00 0000 быстрое затухание 01 1001 вперед 10 0110 реверс 11 0101 медленный распад
Преимущество такой компоновки в том, что все полезные режимы работы
сохраняются и кодируются минимальным количеством битов; последний
важно при использовании микроконтроллера или компьютерной системы для управления
H-мост, потому что многие такие системы имеют только ограниченное количество доступных битов.
для параллельного вывода. К сожалению, немногие из интегрированных чипов H-моста на
рынке есть такая простая схема управления.
На рынке имеется ряд встроенных драйверов Н-моста, но
по-прежнему полезно взглянуть на реализацию дискретных компонентов для понимания
как работает Н-мост. Антонио Рапозо
([email protected]) предложил схему H-моста, показанную на рис. 3.14;
Рисунок 3.14
Входы X и Y этой схемы могут управляться открытым коллектором.
Выходы TTL, как в схеме униполярного возбуждения на основе Дарлингтона.
на рисунке 3.7. Обмотка двигателя будет находиться под напряжением, если ровно один из
входы X и Y высокие, и ровно один из них низкий. Если оба
низкий уровень, оба понижающих транзистора будут выключены.
Если оба имеют высокий уровень, оба подтягивающих транзистора будут выключены.
В результате эта простая схема переводит двигатель в режим динамического торможения.
как в состоянии 11, так и в состоянии 00, и не предлагает режим движения по инерции.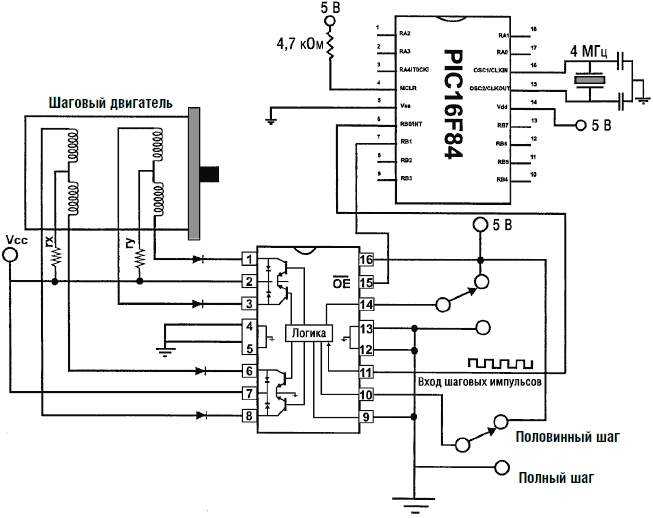
Схема на рис. 3.14 состоит из двух одинаковых половинок, каждая из которых
может быть правильно описан как двухтактный драйвер. Термин половинный H-мост
иногда применяется к этим схемам! Также стоит отметить, что
полуH-мост имеет схему, очень похожую на схему выходного привода
используется в логике TTL. Фактически, линейные драйверы TTL с тремя состояниями, такие как 74LS125A,
а 74LS244 можно использовать как полуH-мост для небольших нагрузок, как показано на рисунке.
на рисунке 3.15:
Рисунок 3.15
Эта схема эффективна для управления двигателями сопротивлением до 50 Ом на
обмотки при напряжении примерно до 4,5 вольт с использованием источника питания 5 вольт.
Каждый буфер с тремя состояниями в LS244 может потреблять примерно в два раза больше тока, чем он
может быть источником, а внутреннее сопротивление буферов достаточно, когда
источник тока, чтобы равномерно разделить ток между драйверами, которые
выполняются параллельно. Этот моторный привод допускает все полезные состояния
достигается драйвером на рис. 3.13, но эти состояния не кодируются как
3.13, но эти состояния не кодируются как
эффективно:
XYE Режим —1 быстрое затухание 000 более медленное затухание 010 вперед 100 реверс 110 медленный распад
Второй режим динамического торможения, XYE=110, обеспечивает несколько более слабое торможение.
эффект, чем первый из-за того, что драйверы LS244 могут больше просадить
ток, чем они могут получить.
Микрочип (ранее Telcom Semiconductor)
TC4467
Драйвер Quad CMOS — еще один пример драйвера общего назначения.
которые можно использовать как 4 независимых полупроводниковых моста. В отличие от предыдущих драйверов,
В отличие от предыдущих драйверов,
техпаспорт этого драйвера даже предлагает использовать его для управления двигателем
приложений, с напряжением питания до 18 вольт и
до 250 миллиампер на обмотку двигателя.
Одна из проблем с серийно выпускаемым управлением шаговым двигателем
чипов заключается в том, что многие из них имеют относительно короткий срок жизни на рынке. За
например, серия микросхем Seagate IPxMxx с двойным H-мостом (от IP1M10 до
IP3M12) были очень хорошо продуманы, но, к сожалению, оказалось, что
Seagate делала их только тогда, когда они использовали шаговые двигатели для позиционирования головы.
в дисководах Seagate. Тошиба ТА7279двойной драйвер H-моста будет
еще один отличный выбор для двигателей до 1 ампера, но опять же, это
судя по всему, сделано только для внутреннего пользования.
SGS-Томпсон
(и другие)
L293
двойной H-мост — близкий конкурент
для вышеперечисленных микросхем, но в отличие от них не содержит защитных диодов.
L293D
Чип, представленный позже, совместим по выводам и включает в себя эти диоды.
Если используется более ранняя версия L293, каждая обмотка двигателя должна быть подключена через перемычку.
выпрямитель (аналог 1N4001). Использование внешних диодов позволяет
резистор, который нужно поместить в текущий путь рециркуляции, чтобы ускорить распад
ток в обмотке двигателя при его выключении; это может быть желательно
в некоторых приложениях. L29Семейство 3 предлагает отличный выбор для вождения
небольшие биполярные шаговые двигатели, потребляющие до одного ампера на обмотку двигателя при напряжении до 36
вольт. На рис. 3.16 показана общая для микросхем L293B и L293D разводка выводов:
Рисунок 3.16
Этот чип можно рассматривать как 4 независимых полупроводниковых моста, включенных попарно.
или как два полных Н-моста. Это силовой DIP-пакет с контактами 4, 5, 12.
и 13 предназначены для отвода тепла к печатной плате или внешнему радиатору.
SGS-Томпсон
(и другие)
L298
двойной H-мост очень похож на
выше, но способен выдерживать до 2 ампер на канал и упакован как
силовой компонент; как и в случае с LS244, безопасно подключать два H-моста.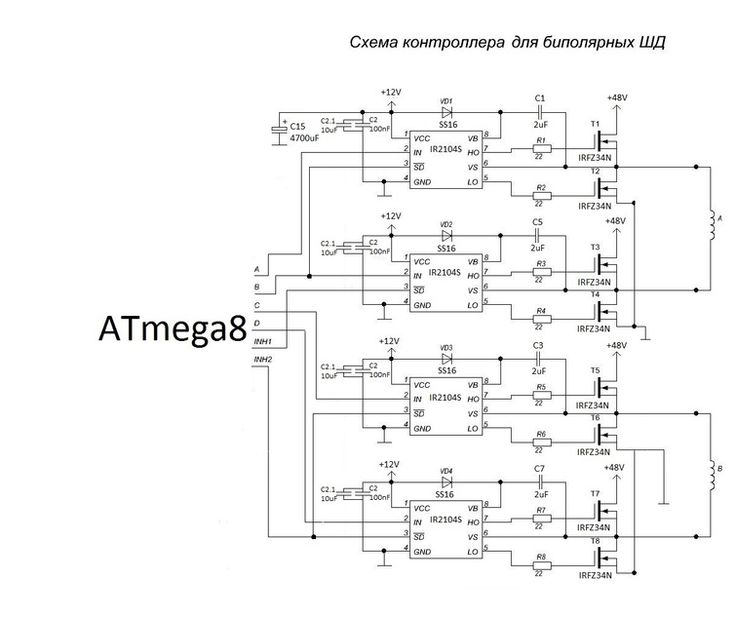
в корпусе L298 в один 4-амперный H-мост (в паспорте на эту микросхему
дает конкретные советы о том, как это сделать). Одно предупреждение уместно
относительно L298; этот чип очень быстро переключается, достаточно быстро, чтобы
банальные защитные диоды (эквивалент 1N400X) не работают. Вместо,
используйте диод, такой как BYV27. Национальный полупроводник LMD18200
H-мост — еще один хороший пример; это обрабатывает до 3 ампер и имеет встроенный
защитные диоды.
В то время как встроенные H-мосты недоступны для очень больших токов или очень
высоким напряжением, на рынке есть хорошо спроектированные компоненты, упрощающие
построение Н-мостов из дискретных коммутаторов. Например,
International Rectifier продает линейку
драйверы половинного Н-моста; два таких чипа плюс 4 переключающих транзистора MOSFET
достаточно построить H-мост.
ИР2101,
ИР2102
и
ИР2103
являются основными драйверами половины Н-моста. Каждая из этих микросхем имеет 2 логических входа для
напрямую управлять двумя переключающими транзисторами на одной ноге H-моста.
ИР2104
и
ИР2111
имеют аналогичную логику на стороне выхода для управления переключателями H-моста, но
они также включают логику на стороне ввода, которая в некоторых приложениях может уменьшить
потребность во внешней логике. В частности, 2104 включает в себя вход включения, поэтому
что 4 микросхемы 2104 плюс 8 переключающих транзисторов могут заменить L293 без
нужна дополнительная логика.
Технический паспорт для
Микрочип (ранее Telcom Semiconductor)
TC4467
семейство четырехъядерных CMOS-драйверов включает информацию о том, как использовать драйверы в этом
семейство для управления силовыми полевыми МОП-транзисторами Н-моста, работающими от напряжения до 15 вольт.
Ряд производителей выпускают сложные микросхемы Н-моста, включающие ток
схема ограничения; они являются предметом следующего раздела.
Также стоит отметить наличие ряда 3-х фазных мостовых драйверов на
рынок, подходящий для привода Y или треугольника, 3-фазный, постоянный
магнитные степперы. Таких моторов мало, и фишек этих не было
разработан с учетом степперов.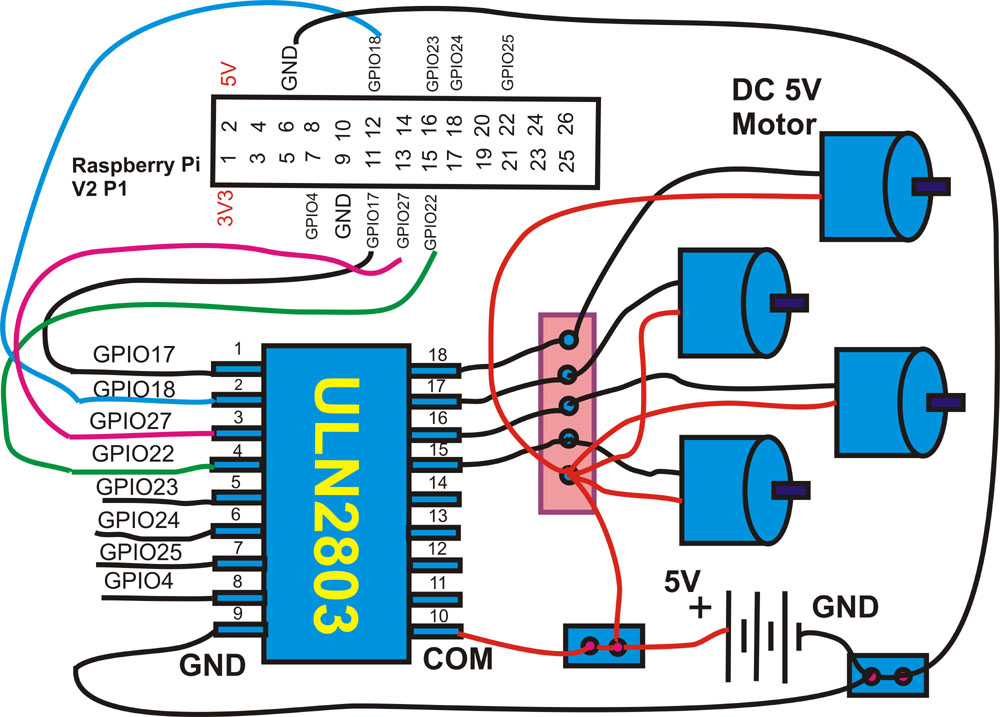 Тем не менее, Toshiba TA7288P,
Тем не менее, Toshiba TA7288P,
GL7438, TA8400 и TA8405 — чистые конструкции, и 2 таких чипа, с
один из 6 игнорируемых полумостов будет чисто управлять 5-обмоточной 10
шаг на оборот двигателя.
Схема управления шаговыми двигателями
- Учебный дом TI
- Лаборатория точности TI
- TI Precision Labs — Драйверы двигателей
- Шаговые двигатели
- Цепь привода шаговых двигателей
Лаборатория точности TI
МЕНЮ
TI Precision Labs — Усилители (106)
TI Precision Labs — Часы и хронометраж (18)
TI Precision Labs — Преобразователи данных (88)
TI Precision Labs — интерфейс (44)
TI Precision Labs — Изоляция (18)
TI Precision Labs — Микроконтроллеры (18)
TI Precision Labs — драйверы двигателей
(35)Знакомство с драйверами двигателей (2)
Коллекторные двигатели постоянного тока (4)
Шаговые двигатели (8)
Бесщеточные двигатели постоянного тока (9)
Технология двигателей (4)
Проектирование с помощью драйверов двигателей (8)
TI Precision Labs — Коммутаторы и мультиплексоры (22)
TI Precision Labs — датчики (77)
TI Precision Labs — Аудио (7)
Электронная почта
[ВОСПРОИЗВЕДЕНИЕ МУЗЫКИ] Добро пожаловать во вторую главу серии TI Precision Labs, посвященной шаговым двигателям.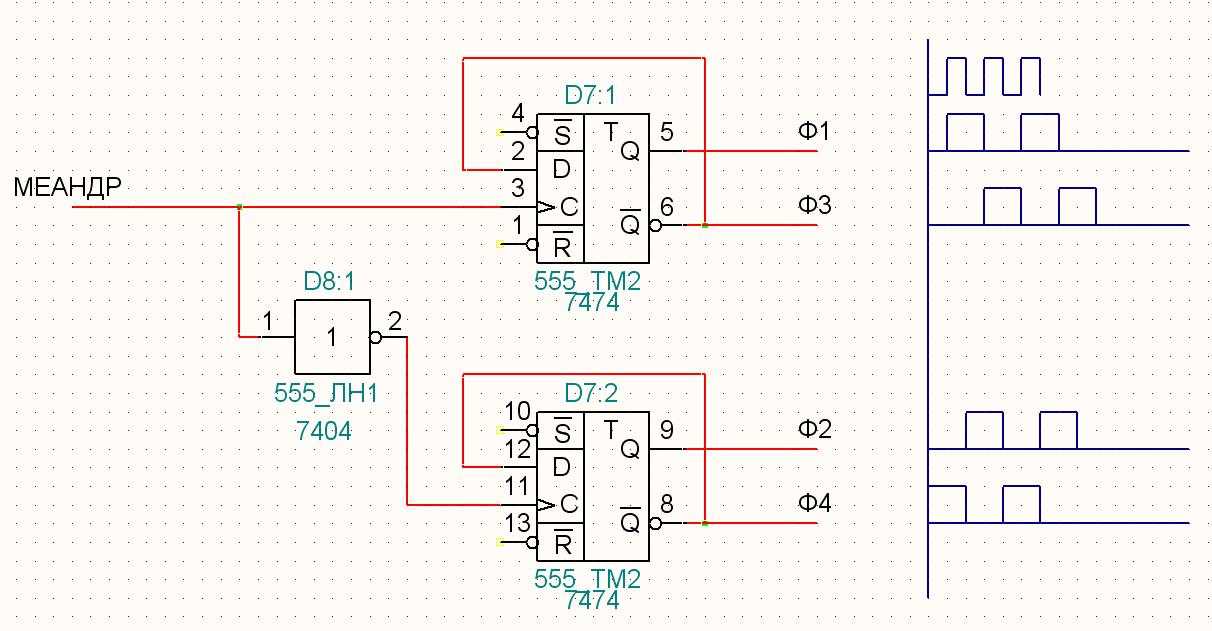 Меня зовут Рик Дункан, и сегодня я расскажу о схеме управления шаговыми двигателями. Прежде чем начать, давайте рассмотрим шаговые двигатели. Во многих приложениях используются шаговые двигатели, поскольку они обеспечивают точное управление положением без использования внешних датчиков или сложных алгоритмов управления. Иногда это называется управлением по положению без обратной связи. Шаговый двигатель может обеспечивать непрерывное движение или поддерживать фиксированное положение ротора в зависимости от требований системы. Эти функции делают шаговые двигатели простыми в реализации и недорогим решением для разработчиков систем.
Меня зовут Рик Дункан, и сегодня я расскажу о схеме управления шаговыми двигателями. Прежде чем начать, давайте рассмотрим шаговые двигатели. Во многих приложениях используются шаговые двигатели, поскольку они обеспечивают точное управление положением без использования внешних датчиков или сложных алгоритмов управления. Иногда это называется управлением по положению без обратной связи. Шаговый двигатель может обеспечивать непрерывное движение или поддерживать фиксированное положение ротора в зависимости от требований системы. Эти функции делают шаговые двигатели простыми в реализации и недорогим решением для разработчиков систем.
В этой презентации основное внимание будет уделено схемам, необходимым для управления биполярными шаговыми двигателями. Для биполярных шаговых двигателей два Н-моста позволяют току течь через обмотку в любом направлении. Полевые транзисторы в H-мосте напоминают букву H. Направление тока определяет полярность магнитного поля, создаваемого этой обмоткой.
Встроенные драйверы шаговых двигателей контролируют положение ротора, возбуждая обмотки шаговых двигателей в определенной последовательности.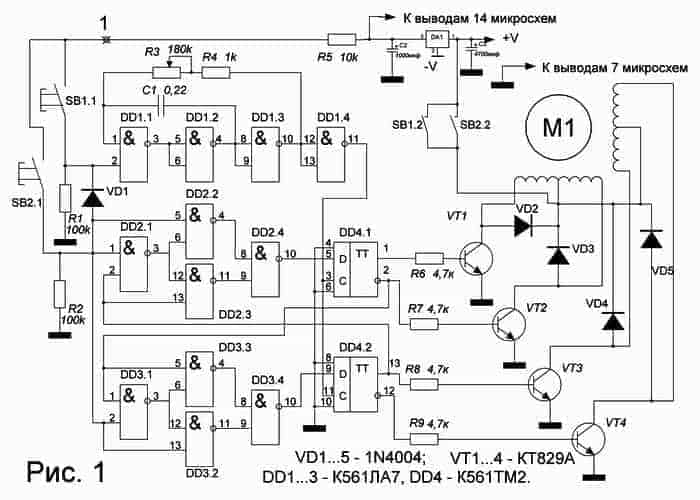 В этом примере микроконтроллер посылает импульс драйверу шагового двигателя, чтобы указать, что роторы шагового двигателя должны переместиться в следующую позицию. Когда драйвер получает импульс шага, драйвер активирует одну из фаз в последовательности. Когда драйвер получает следующий импульс, драйвер активирует следующую фазу, чтобы ротор мог продолжать движение.
В этом примере микроконтроллер посылает импульс драйверу шагового двигателя, чтобы указать, что роторы шагового двигателя должны переместиться в следующую позицию. Когда драйвер получает импульс шага, драйвер активирует одну из фаз в последовательности. Когда драйвер получает следующий импульс, драйвер активирует следующую фазу, чтобы ротор мог продолжать движение.
H-мосты, встроенные в драйвер шагового двигателя, контролируют ток в фазных обмотках в обоих направлениях, чтобы изменить полярность обмоток и продолжить движение ротора. Если микроконтроллеры перестанут посылать импульсы, ротор останется неподвижным и выровненным с магнитным полем находящегося под напряжением пространства. Встроенные драйверы шаговых двигателей часто реализуют дополнительные функции защиты, микрошагов и настройки шаговых двигателей.
Внутренние H-мосты шагового двигателя теперь видны, чтобы четко показать работу. Шаговые двигатели могут управляться напряжением или током. Управление напряжением — простейший способ управления шаговым двигателем. Напряжение H-моста устанавливается равным номинальному напряжению шагового двигателя. Ток ограничивается сопротивлением двигателя и не превышает номинального значения. Скорость шагового двигателя ограничена, поскольку ограничено изменение тока.
Напряжение H-моста устанавливается равным номинальному напряжению шагового двигателя. Ток ограничивается сопротивлением двигателя и не превышает номинального значения. Скорость шагового двигателя ограничена, поскольку ограничено изменение тока.
Современные драйверы шаговых двигателей регулируют ток для повышения производительности шаговых двигателей. Регулировка тока позволяет напряжению, подаваемому на H-мосты, быть намного выше, чем номинальное напряжение шагового двигателя. Например, шаговый двигатель с номинальным напряжением менее 5 вольт может управляться Н-мостами, подключенными к 24 вольтам, когда используется регулировка тока. Благодаря тому, что ток регулируется на определенном уровне, напряжение, создаваемое током, протекающим через сопротивление обмотки, находится в пределах номинальных значений шагового двигателя.
Работа при более высоких напряжениях H-моста также позволяет току в обмотках шагового двигателя достигать заданного уровня за меньшее время. Более раннее достижение заданного уровня тока позволяет двигателю вращаться быстрее.