Содержание
Схемы управления асинхронными электродвигателями | Электрооборудование и автоматизация сельскохозяйственных агрегатов
- Подробности
- Категория: Разное-архив
- РЗиА
- потребитель
- оборудование
- низковольтное
- подстанции
- среднее напряжение
Содержание материала
- Электрооборудование и автоматизация сельскохозяйственных агрегатов
- Газоразрядные лампы
- Установки для электрического освещения
- Облучение растений в теплицах
- Применение осветительных установок на птицефермах
- Установки ультрафиолетового облучения
- Установки инфракрасного нагрева
- Электротехнологические установки
- Установки электронно-ионной технологии
- Ультразвуковая техника
- Установки для магнитной обработки материалов
- Устройства для обработки сред электрическим током
- Электропривод и его основные части
- Характеристики и режимы работы электродвигателей
- Регулирование скорости в электроприводах
- Выбор электродвигателей
- Аппаратура управления электродвигателями
- Рубильники и переключатели
- Путевые выключатели
- Контакторы и электромагнитные пускатели
- Реле управления
- Тиристорные пускатели
- Логические элементы
- Плавкие предохранители
- Автоматические выключатели
- Тепловые реле и температурная зашита
- Автоматическое управление электроприводами
- Принципы управления двигателями постоянного тока
- Схемы управления асинхронными электродвигателями
- Блокировочные связи и сигнализация в схемах управления электроприводами
- Следящий привод, применение магнитных и тиристорных усилителей
- Дистанционное управление электроприводами
- Электропривод ручных инструментов и стригальных машинок
- Управление электроприводами поточных линий
- Электропривод поточных линий приготовления кормов
- Управление поточными линиями кормораздачи
- Управление электроприводами комплекса машин по удалению навоза и помета
- Эффективность и перспективы электрификации тепловых процессов, способы нагрева
- Способы охлаждения и типы холодильных машин
- Электродуговые нагреватели
- Индукционные и диэлектрические нагреватели
- Автоматизация электронагревательных установок
- Выбор и настройка автоматических регуляторов электронагревательных установок
- Электрические водонагреватели и котлы
- Электродные водогрейные и паровые котлы
- Электрооборудование и автоматизация электрокотельных, электрокалориферные установки
- Электрообогреваемые полы
- Средства местного электрообогрева
- Электрические инкубаторы
- Электрический обогрев парников и теплиц
- Установки для электротепловой обработки продуктов и кормов
- Электротерморадиационная и высокочастотная сушка
- Электротепловая обработка пищевых продуктов и кормов
- Электротермические печи
- Электросварочное оборудование
- Высокочастотные установки
- Низкотемпературные установки
- Холодильные производственные установки
- Электрооборудование и автоматизация плодо- и овощехранилищ
Страница 29 из 59
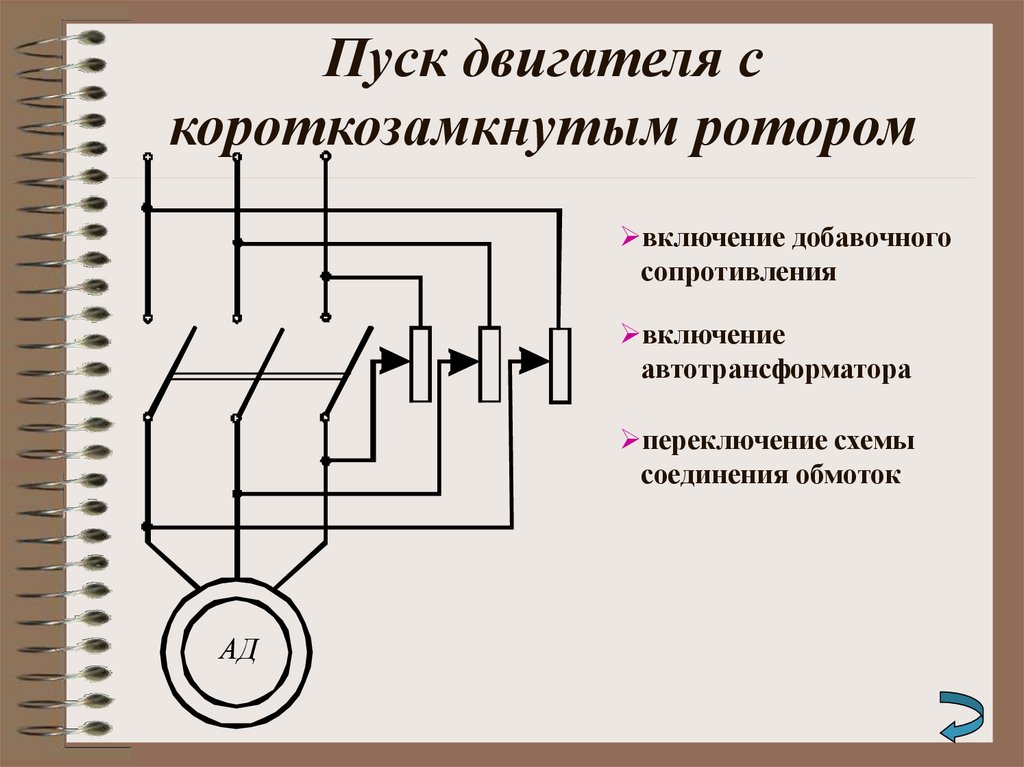
Управление двигателями с короткозамкнутым ротором.
Асинхронные электродвигатели с короткозамкнутым ротором, как правило, управляются при помощи магнитных пускателей. Пуск электродвигателей осуществляется непосредственным включением на полное напряжение.
Простейшая схема управления двигателем с нереверсивным магнитным пускателем показана на рисунке 13.1. В этой схеме предусматривается питание силовых цепей и цепей управления от одного источника напряжения.
При включении автомата F напряжение подается на силовые и вспомогательные цепи схемы. Нажатием кнопки S2 замыкается цепь катушки магнитного пускателя К, при этом главные контакты К замыкаются и включают двигатель в сеть. Одновременно блок-контакт К шунтирует кнопку S2 и дальнейшее удержание кнопки в нажатом состоянии становится ненужным.
Отключение двигателя от сети выполняется нажатием кнопки S1. Цепь питания катушки К разрывается, что приводит к размыканию всех контактов магнитного пускателя.
В схеме предусмотрена защита электродвигателя от коротких замыканий и перегрузки при помощи автоматического выключателя, который для этой цели содержит комбинированный расцепитель.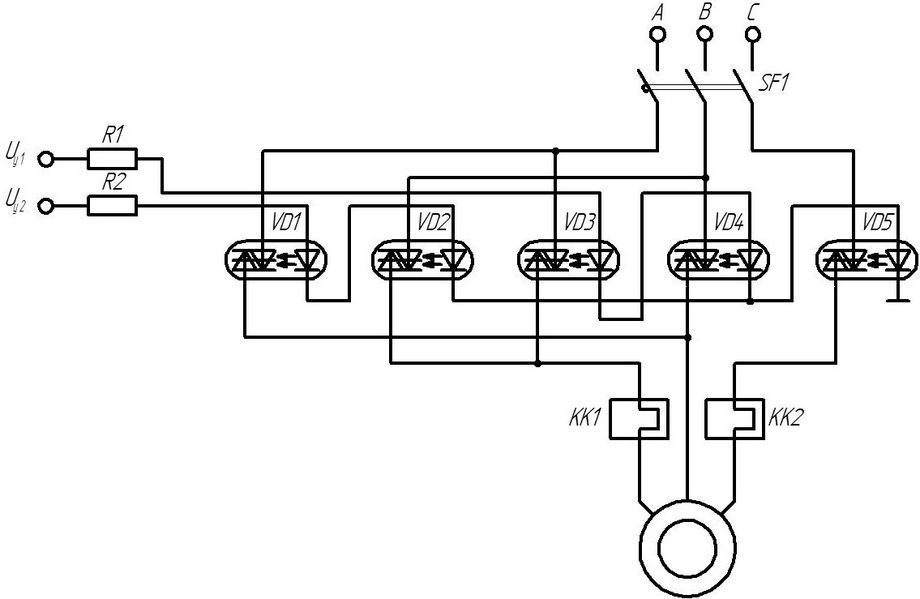
Схема магнитного пускателя с кнопочными выключателями осуществляет также защиту от самопроизвольных включений электродвигателя (нулевая защита) при восстановлении напряжения питания после кратковременного его исчезновения. Повторный пуск электродвигателя возможен только после вторичного нажатия кнопки S2. В тех случаях, когда необходимо изменять направление вращения, управляют электродвигателем реверсивным магнитным пускателем, схема которого показана на рисунке 13.7.
При нажатии кнопки S1 получает питание катушка К1 магнитного пускателя, замыкаются силовые контакты в главной цепи и статор двигателя присоединяется к сети при прямом чередовании фаз.
При нажатии кнопки S2 ее размыкающий контакт, установленный в цепи катушки К1, размыкается, благодаря чему реверс электродвигателя может быть произведен без предварительного нажатия кнопки S3. Чередование фаз при этом меняется на обратное.
Для торможения асинхронных короткозамкнутых электродвигателей применяется электродинамическое торможение и торможение противовключением.
Электродинамическое торможение осуществляется путем отключения обмоток статора электродвигателя от сети переменного тока и подачей в них постоянного тока на период торможения.
Торможением противовключением осуществляется при помощи реверсивного магнитного пускателя и реле контроля скорости.
Реле состоит из постоянного магнита, вращающегося вокруг оси и соединенного с валом двигателя. Постоянный магнит помещен в цилиндр, представляющий собой устройство в виде беличьей клетки. Цилиндр укреплен на подшипниках и может поворачивайся на определенный угол до упора, при этом переключаются контакты контактного мостика. При вращении постоянного магнита его поле пересекают проводники цилиндра, индуктируя в них электрический ток. Взаимодействие индуктированного тока и вращающегося магнитного потока приводит к перемещению цилиндра и переключению контактного мостика. На рисунке 13.8 показана схема торможения методом, противовключения.
При нажатии одной из кнопок S1 или S2 замыкаются соответственно цепи катушек контакторов и статор электродвигателя подключается к сети, ротор начинает вращаться. Одновременно с началом вращения приводится в действие вал реле контроля скорости и срабатывают соответствующие контакты Е1 или Е2, которые подготавливают цепи катушек контакторов К1 или К2 к работе.
Одновременно с началом вращения приводится в действие вал реле контроля скорости и срабатывают соответствующие контакты Е1 или Е2, которые подготавливают цепи катушек контакторов К1 или К2 к работе.
Рис. 13.8 Схема торможения асинхронного электродвигателя методом противовключения.
При остановке двигателя кнопкой S3 разрывается цепь ранее возбужденной катушки, отпадают контакты контакторов К1 или К2, а блок-контактом замыкаются цепи катушки контактора К1 в том случае, если электродвигатель работал в режиме «вперед», и наоборот. Таким образом, привод осуществляет реверс, однако двигатель продолжает вращаться в прежнем направлении, работая в тормозном режиме противовключения.
Рис. 13.9. Схема автоматического управления асинхронным электродвигателем с фазным ротором.
Частота вращения ротора уменьшается, и как только частота вращения станет близкой к нулю, контакты реле контроля скорости разомкнут цепи катушек контакторов К1 или К2 и отключат статор двигателя от сети.
Управление двигателями с фазным ротором. Пуск, торможение и регулирование частоты вращения электродвигателей с фазным ротором сопряжены с изменением сопротивлений, включенных в роторную цепь. Сопротивления должны изменяться в определенной последовательности.
На рисунке 13.9 показана схема автоматического управления двигателем с фазным ротором при помощи командоконтроллера, резисторы могут быть использованы как пусковые и регулировочные.
Для подготовки к пуску двигателя рукоятку командоконтроплера устанавливают в нулевое положение. При этом получают питание реле напряжения К.1, которое, сработав, зашунтирует контакт контроллера, замыкающийся только в нулевом положении. В положении 1 режима «Вперед» оказывается под напряжением катушка контактора К2, который срабатывает и своими главными контактами подключает статор двигателя к сети при введенных полностью ступенях реостата. Одновременно срабатывает реле К4, которое посредством своего замыкающего контакта замкнет цепь контактора противовключения К5, а последний своими главными контактами выключит резисторы противовключения в роторе и подготовит цепь для питания катушки первого контактора ускорения Кб. Таким образом, в положении 1 командоконтроллера двигатель работает на пониженной скорости при введенном в цепь ротора пусковом сопротивлении.
Таким образом, в положении 1 командоконтроллера двигатель работает на пониженной скорости при введенном в цепь ротора пусковом сопротивлении.
Для увеличения частоты вращения двигателя рукоятку командоконтроллера переводят в положение 2 «Вперед». Тогда выключится контактор Кб, шунтирующий первую ступень пускового резистора и с выдержкой времени подготавливающий цепь для питания контактора К7. При постановке рукоятки в следующие положения включаются последовательно контакторы К7 и К8, шунтирующие остальные ступени пускового реостата.
Реле времени, встроенные в контакторы К5, Кб, К7, обеспечивают минимальное время переключения пусковых сопротивлений, а увеличение времени пуска может быть достигнуто вручную медленным передвижением рукоятки контроллера. Аналогичным образом работает схема при перемещении рукоятки контроллера из нулевого положения в положения 1, 2, 3, 4 «Назад», только при этом будет включен контактор К3. Если оператор мгновенно переведет рукоятку из положения 4 «Вперед» в положение 4 «Назад», то вначале последовательно отключатся контакторы К8, К7, Кб, К5 ив цепь ротора будут введены все ступени реостата. Затем отключается контактор К.2 и после этого включится контактор КЗ. Так как рукоятка переведена мгновенно, скорость двигателя еще не успела упасть. Таким образом, статор двигателя, ротор которого вращается вперед, будет включен для работы назад, то есть двигатель будет переведен в режим противовключения. Так как ток противовключения превосходит пусковой ток, то реле К9 возбудившись, разомкнет свои контакты в цепи катушки контактора К5 и будет их держать раскрытыми до тех пор, пока ток в цепи ротора не станет равным пусковому. Это произойдет в момент, когда ротор двигателя остановится. Контактор К5, возбудившись, зашунтирует ступень противовключения реостата. Выключение остальных ступеней будет происходить с выдержками времени контакторов К5, Кб и К7 так же, как было при обычном пуске. Блокировочное реле К4 не позволяет в момент реверсирования включаться контактору К5. Пока реле К4 сработает, реле К9 успевает разомкнуть свои контакты.
Затем отключается контактор К.2 и после этого включится контактор КЗ. Так как рукоятка переведена мгновенно, скорость двигателя еще не успела упасть. Таким образом, статор двигателя, ротор которого вращается вперед, будет включен для работы назад, то есть двигатель будет переведен в режим противовключения. Так как ток противовключения превосходит пусковой ток, то реле К9 возбудившись, разомкнет свои контакты в цепи катушки контактора К5 и будет их держать раскрытыми до тех пор, пока ток в цепи ротора не станет равным пусковому. Это произойдет в момент, когда ротор двигателя остановится. Контактор К5, возбудившись, зашунтирует ступень противовключения реостата. Выключение остальных ступеней будет происходить с выдержками времени контакторов К5, Кб и К7 так же, как было при обычном пуске. Блокировочное реле К4 не позволяет в момент реверсирования включаться контактору К5. Пока реле К4 сработает, реле К9 успевает разомкнуть свои контакты.
Для остановки двигателя рукоятку командоконтроллера необходимо поставить в нулевое положение. Наличие реле К1 препятствует повторному пуску двигателя, если рукоятка командоконтроллера не поставлена в нулевое положение.
Наличие реле К1 препятствует повторному пуску двигателя, если рукоятка командоконтроллера не поставлена в нулевое положение.
- Назад
- Вперёд
- Назад
- Вперёд
- Вы здесь:
- Главная
- Архив
- Разное архив
- Энергетика Северного и Центрального Казахстана
Еще по теме:
- Защита сельских сетей от кз
- Электрические аппараты и оборудование выше 1000В
- Электрификация сельскохозяйственного производства
- В помощь сельскому электромонтеру
- Электромонтер строительной площадки
Схема управления двигателем.
 Трехфазные асинхронные двигатели с короткозамкнутым ротором. Пост кнопочный
Трехфазные асинхронные двигатели с короткозамкнутым ротором. Пост кнопочный
На сегодняшний день чаще всего применяются релейно-контакторные схемы управления. В таких системах главными приборами являются электромагнитные пускатели и реле. Кроме того, в качестве привода для станков и других установок чаще всего применяется такое устройство, как асинхронный двигатель трехфазного тока с короткозамкнутым ротором.
Описание двигателей
Такие типы приводов стали активно использоваться из-за того, что они просты в эксплуатации, обслуживании, ремонте и устройстве. У них имеется лишь один серьезный минус, который заключается в том, что пусковой ток превышает номинальный примерно в 5-7 раз, а также отсутствует возможность простыми способами управления плавно изменять скорость вращения ротора.
Данный тип машин стал активно использоваться из-за того, что в схемы электроустановок начали активно внедряться такие приборы, как преобразователи частоты. Еще одно весомое преимущество асинхронного двигателя с трехфазным током и коротко замкнутым ротором в том, что он обладает достаточно простой схемой подключения в сеть. Для его включения в работу потребуется лишь подать трехфазное напряжение на статор, и устройство тут же запустится. В наиболее простых схемах управления для его запуска используется такое устройство, как пакетный выключатель или же трехфазный рубильник. Однако данные приборы, несмотря на свою простоту и удобство в эксплуатации, являются элементами ручного управления.
Это является огромным минусом, так как в схемах большинства установок необходимо использовать схему включения двигателя именно в автоматическом режиме. Также необходимо предусматривать автоматическое изменение направления вращения ротора двигателя, то есть его реверс и очередность включения в работу нескольких двигателей.
Основные схемы подключения
Чтобы обеспечить все необходимые функции, которые были описаны выше, необходимо использовать именно автоматические режимы работы, а не элементы ручного управления приводом. Однако справедливо будет отметить, что некоторые старые образцы станков для резки металла все еще используют пакетные переключатели для смены числа пар полюсов или же для обеспечения реверса.
Применение в схемах подключения асинхронных двигателей (АД) не только пакетных выключателей, но и рубильников возможно, но они выполняют лишь одну функцию — подключение схемы к подаче напряжения. Все остальные операции, которые предусматривает схема управления двигателем, выполняются под руководством электромагнитного пускателя.
При подключении схемы АД с короткозамкнутым ротором через такой тип пускателя обеспечивается не только удобный режим управления, но и создается еще и нулевая защита. Чаще всего в качестве схем управления двигателем в станках, установках и других машинах используется три метода включения:
- первая схема применяется для управления нереверсивным двигателем, использует лишь один пускатель электромагнитного типа и две кнопки — «Пуск» и «Стоп»;
- вторая схема управления двигателем реверсивного типа предусматривает использование трех кнопок и двух пускателей обычного типа или одного реверсивного типа;
- третья схема управления отличается от предыдущей лишь тем, что из трех кнопок управления две имеют спаренные контакты.

Схема с пускателем электромагнитного типа
Пуск асинхронного двигателя в такой схеме подключения осуществляется с нажатия соответствующей кнопки. Когда она нажимается, то на катушку пускателя подается ток с напряжением в 220 В. У пускателя имеется подвижная часть, которая при подаче напряжения притягивается к неподвижной, из-за чего контакты устройства замыкаются. Данные силовые контакты подают входящее напряжение на двигатель. Параллельно этому процессу замыкается также и блокировочный контакт. Его включение осуществляется параллельно кнопке «Пуск». Именно благодаря этой функции при отпускании данной кнопки катушка все еще остается под напряжением и продолжает питать двигатель, чтобы он функционировал.
Если по какой-либо причине во время пуска асинхронного двигателя, то есть при нажатии на «Пуск», блокировочный контакт не замыкался бы или, к примеру, отсутствовал, то сразу при отпускании ток переставал бы подаваться на катушку, силовые контакты пускателя размыкались бы, и работа двигателя тут же прекращалась. Такой режим работы называется «толчковым». Он имеет место, к примеру, при управлении кран-балкой.
Для того чтобы остановить трехфазный асинхронный двигатель с короткозамкнутым ротором, необходимо нажать на кнопку «Стоп». Принцип работы в таком случае достаточно прост и основан на том, что нажатие кнопки создает разрыв в цепи, разъединяя силовые контакты пускателя, останавливая тем самым работу двигателя. Если в момент работы исчезнет напряжение на источнике питания, то двигатель также остановится, так как такой дефект равносилен нажатию на «Стоп» и дальнейшему созданию разрыва в цепи прибора.
После того как устройство было остановлено отключением или пропажей питания, запустить его повторно можно лишь с кнопки. Именно это и называется нулевой защитой в схемах управления двигателем. Если бы вместо пускателя здесь был установлен переключатель или рубильник, то при повтором возникновении напряжения в источнике двигатель автоматически бы запустился и продолжил работу. Это считается небезопасным для обслуживающего персонала.
Применение двух пускателей в реверсивном устройстве
Схема управления асинхронным двигателем такого типа, по сути, работает таким же образом, как и предыдущая. Основное отличие здесь заключается в том, что появляется возможность при необходимости изменять направление вращения ротора. Чтобы это осуществить, необходимо изменить работающие фазы, имеющиеся на обмотке статора. К примеру, если нажать на кнопку «Пуск» КМ1, то порядок рабочих фаз будет А-В-С. Если же включить устройство со второй кнопки, то есть с КМ2, то порядок работающих фаз сменится на противоположный, то есть С-В-А.
Таким образом получается, что для управления асинхронным двигателем схемой такого типа необходимо две кнопки «Пуск», одна кнопа «Стоп» и два пускателя.
При нажатии на первую кнопку, которая в схеме обычно обозначается как SB2, произойдет включение первого контактора и вращение ротора в одну из сторон. Если возникает необходимость смены направления вращения на противоположную, необходимо нажать на «Стоп», после чего запуск двигателя осуществляется кнопкой SB3 и включением в работу второго контактора. Другими словами, чтобы использовать данную схему, необходимо промежуточное нажатие на кнопку остановки.
Так как управление работой двигателя с такой схемой усложняется, возникает необходимость в дополнительной защите. В данном случае речь идет об эксплуатации в пускателе нормально-закрытых (размыкающих) контактов. Они необходимы для того, чтобы обеспечить защиту от одновременного нажатия на обе кнопки «Пуск». Их нажатие без остановки приведет к возникновению короткого замыкания. Дополнительные контакты в таком случае препятствуют одновременному включению обоих пускателей. Это происходит из-за того, что при одновременном нажатии один из них включится на секунду позже второго. За это время первый контактор успеет разомкнуть свои контакты.
Недостаток управления электрическим двигателем с такой схемой заключается в том, что пускатели должны обладать большим количеством контактов или же контактными приставками. Любой из этих двух вариантов не только усложняет всю электрическую конструкцию, но еще и удорожает ее сборку.
Третья разновидность схемы управления
Основное отличие данной схемы системы управления двигателем от предыдущей в том, что в цепи каждого из контакторов, кроме общей кнопки «Стоп», имеется еще по два контакта. Если рассматривать первый контактор, то в его цепи имеется дополнительный контакт у SB2 — это нормально-открытый (замыкающий), а SB3 имеет нормально-закрытый (размыкающий) контакт. Если рассматривать схему подключения второго электромагнитного пускателя, то его кнопка «Пуск» будет иметь те же контакты, но расположенные наоборот относительно первого.
Таким образом удалось добиться того, что при нажатии на одну из них при работающем двигателе цепь уже эксплуатирующейся будет размыкаться, а другая, наоборот, замыкаться. У такого типа подключения имеется несколько преимуществ. Во-первых, данная схема не нуждается в защите от одновременного включения, а значит, отпадает необходимость в наличии дополнительных контактов. Во-вторых, появляется возможность выполнения реверсом без промежуточного нажатия на «Стоп». При таком подключении эта контактор используется лишь для полной остановки работающего АД.
При таком подключении эта контактор используется лишь для полной остановки работающего АД.
Стоит отметить, что рассмотренные схемы управления пуском двигателя являются несколько упрощенными. В них не рассматривается наличие различных дополнительных аппаратов защиты, элементов сигнализации. Кроме того, в некоторых случаях возможно осуществлять питание электромагнитной катушки пускателя от источника в 380 В. В таком случае появляется возможность подключения лишь от двух фаз, к примеру А и В.
Схема управления с прямым пуском и функцией времени
Запуск двигателя осуществляется как обычно — кнопкой, после чего напряжение будет подаваться на катушку пускателя, которая подключит АД к источнику питания. Особенность схемы состоит в следующем: вместе с замыканием контактов у пускателя (КМ) произойдет замыкание одного из его контактов в другой цепи (КТ). Из-за этого происходит замыкание цепи, в которой располагается контактор торможения (КМ1). Но его срабатывание в этот момент не осуществляется, так как перед ним располагается размыкающий контакт КМ.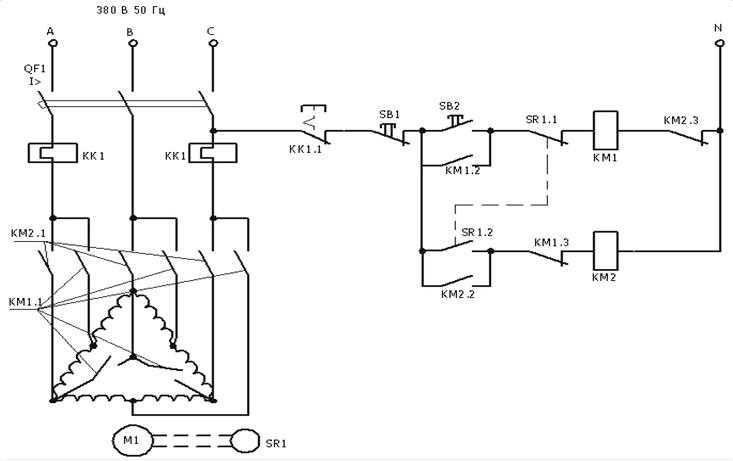
Для отключения служит другая кнопка, размыкающая цепь КМ. В это время осуществляется отключение устройства от сети переменного тока. Однако же вместе с этим происходит замыкание контакта, который находился в цепи реле торможения, который ранее упоминался как КМ1, а также осуществляется отключение цепи в реле времени, которое обозначается как КТ. Именно это приводит к тому, что в работу включается контактор КМ1. В этом случае осуществляется переход схемы управления двигателем на постоянный ток. То есть подача питающего напряжения осуществляется от встроенного источника через выпрямитель, а также резистор. Все это приводит к тому, что агрегат осуществляет динамическое торможение.
Однако на этом работа схемы не заканчивается. В цепи имеется реле времени (КТ), которое начинает отсчет времени торможения сразу после того, как отключается от питания. Когда отведенное время на отключение двигателя истекает, КТ размыкает свой контакт, который имеется в цепи КМ1, он отключается, из-за чего подача тока постоянного типа на двигатель также останавливается. Только после этого происходит полная остановка, и можно считать, что схема управления двигателем вернулась в начальное положение.
Только после этого происходит полная остановка, и можно считать, что схема управления двигателем вернулась в начальное положение.
Что касается интенсивности торможения, то ее можно регулировать силой постоянного тока, который следует через резистор. Для этого нужно выставить необходимое сопротивление на данном участке.
Схема для работы многоскоростного двигателя
Такая схема управления может обеспечить возможность получения двух скоростей двигателя. Для этого осуществляется подключение секций полуобмоток статора в двойную звезду или же в треугольник. Кроме того, в таком случае также обеспечивается возможность реверсирования. Чтобы избежать неисправностей системы управления двигателем, в такой сложной цепи имеется два тепловых реле, а также предохранитель. На схемах они обычно маркируются как КК1, КК1 и FA соответственно.
Изначально возможен пуск ротора с низкой частотой вращения. Для этого в схеме обычно предусмотрена кнопка, которая помечается как SB4. После ее нажатия происходит запуск на низкой частоте. Статор прибора в таком случае подключается по схеме обычного треугольника, а имеющееся реле замыкает два контактора и подготавливает двигатель к подключению питания от источника. После этого нужно нажать на кнопку SB1 или SB2, чтобы определить направление вращения — «Вперед» или «Назад» соответственно.
Статор прибора в таком случае подключается по схеме обычного треугольника, а имеющееся реле замыкает два контактора и подготавливает двигатель к подключению питания от источника. После этого нужно нажать на кнопку SB1 или SB2, чтобы определить направление вращения — «Вперед» или «Назад» соответственно.
Когда разбег до низких частот осуществлен, появляется возможность разогнать двигатель до высоких показателей вращения. Для этого нажимается кнопка SB5, которая отключает один из контакторов от схемы и подключает другой. Если рассматривать это действие с точки зрения работы цепи, то подается команда на переход от треугольника на звезду двойного типа. Для того чтобы полностью остановить работу, имеется кнопка «Стоп», которая на схемах маркируется как SB3.
Кнопочный пост
Данное оборудование предназначается для коммутации, то есть соединения цепей, в которых протекает переменный ток с максимальным напряжением в 660 В и частотой 50 или 60 Гц. Можно эксплуатировать такие устройства и в сетях с постоянным током, но тогда максимальное рабочее напряжение ограничивается 440 В. Возможно применение даже в качестве пульта управления.
Возможно применение даже в качестве пульта управления.
Обычный кнопочный пост имеет следующие особенности своей конструкции:
- Каждая из его кнопок лишена фиксации.
- Имеется кнопка «Пуск», которая чаще всего имеет не только зеленый цвет, но и контакты нормально-разведенного типа. Некоторые модели даже обладают подсветкой, которая включается после нажатия. Предназначение — введение в работу какого-либо механизма.
- «Стоп» — это кнопка, обладающая красным цветом (чаще всего). Располагается она на замкнутых контактах, а ее основное предназначение — это отключение какого-либо прибора от источника питания с целью остановки его работы.
- Отличие между некоторыми приборами состоит в материале, который используется для изготовления каркаса. Он может быть сделан из металла или пластмассы. В данном случае корпус играет важную роль, так как имеет определенную степень защиты, зависящую от материала.
Основные преимущества
Среди основных преимуществ таких приборов выделяются следующие:
- комплектация данного прибора не всегда может быть стандартной, она может корректироваться по пожеланиям заказчика;
- корпус обычно изготавливается из негорючей тугоплавкой пластмассы или же из металла;
- имеется хорошая герметизация, которая достигается за счет наличия резиновой прокладки между крышкой и контактами внутри;
- уплотнитель для данного кнопочного поста находится под хорошей защитой от воздействия каких-либо агрессивных факторов со стороны окружающей среды;
- сбоку имеется дополнительное отверстие, чтобы было удобно вводить нужный кабель;
- все крепления, имеющиеся у поста, изготавливаются из высокопрочной нержавеющей стали.
Тип постов
Существует три типа поста — это ПКЕ, ПКТ и ПКУ. Первый обычно применяется для работы со станками для деревообработки промышленного или домашнего назначения. ПКУ применяется в промышленности, но лишь на тех объектах, где отсутствует опасность взрыва, а концентрация пыли и газа не поднимается выше того уровня, который способен вывести устройство из строя. ПКТ — это именно те посты, которые могут использоваться в схемах управления трехфазными асинхронными двигателями с короткозамкнутым ротором, а также другими двигателями электротехнического типа. Кроме того, они также активно используются для управления таким оборудованием, как кран-балки, мостовые краны и прочие устройства, предназначенные для подъема тяжелого груза.
УПРАВЛЕНИЕ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ПОМОЩЬЮ МАГНИТНОГО ПУСКАТЕЛЯ — FINDOUT.SU
Поможем в ✍️ написании учебной работы
Имя
Поможем с курсовой, контрольной, дипломной, рефератом, отчетом по практике, научно-исследовательской и любой другой работой
Выберите тип работыЧасть дипломаДипломная работаКурсовая работаКонтрольная работаРешение задачРефератНаучно — исследовательская работаОтчет по практикеОтветы на билетыТест/экзамен onlineМонографияЭссеДокладКомпьютерный набор текстаКомпьютерный чертежРецензияПереводРепетиторБизнес-планКонспектыПроверка качестваЭкзамен на сайтеАспирантский рефератМагистерская работаНаучная статьяНаучный трудТехническая редакция текстаЧертеж от рукиДиаграммы, таблицыПрезентация к защитеТезисный планРечь к дипломуДоработка заказа клиентаОтзыв на дипломПубликация статьи в ВАКПубликация статьи в ScopusДипломная работа MBAПовышение оригинальностиКопирайтингДругое
Нажимая кнопку «Продолжить», я принимаю политику конфиденциальности
Цель работы получить практические навыки в собирании схемы управления асинхронным двигателем с короткозамкнутым ротором с помощью магнитных пускателей. Изучить на практике принцип действия реверсивной и нереверсивной схем управления АД. Изучить конструкцию и принцип действия магнитных пускателей. Освоить назначение и принцип действия аппаратов управления. Закрепить навыки по чтению электрических схем.
Изучить на практике принцип действия реверсивной и нереверсивной схем управления АД. Изучить конструкцию и принцип действия магнитных пускателей. Освоить назначение и принцип действия аппаратов управления. Закрепить навыки по чтению электрических схем.
Оборудование и материалы: магнитный пускатель, асинхронный двигатель, соединительные провода.
Теоретические сведения
Магнитный пускатель. Такое название получили трех полюсные контакторы переменного тока со встроенными в фазах тепловыми реле для защиты ЭД от перегрузки недопустимой продолжительности. В магнитных пускателях предусмотрена также нулевая защита, предотвращающая произвольное включение пускателей при восстановлении питания.
Электрическая схема магнитного пускателя и его конструкция изображена на рисунке 3. При нажатии кнопки «Пуск» SB1 подаётся питание на катушку пускателя KV через размыкающие контакты тепловых реле KK1, KK2 и кнопка «Стоп» SB2.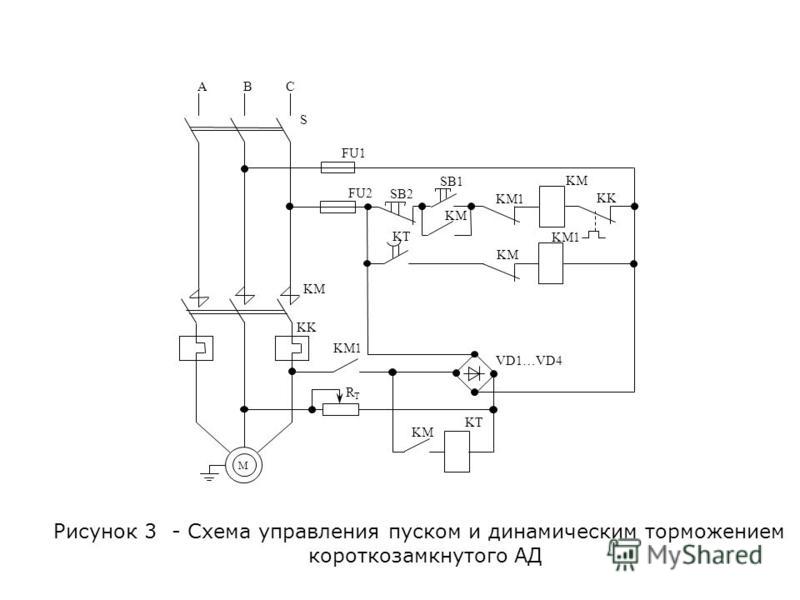
Якорь 6 электромагнита 5 притягивается к сердечнику 4. При этом неподвижные контакты 2 замыкаются подвижным мостиком 8. Нажатие в контакторах обеспечивается пружиной 9. Одновременно замыкаются блок-контакты KV, которые шунтируют кнопку «Пуск» SB1. При перенапряжении ЭД сработают два или одно тепловое реле 11, цепь катушки размыкается контактами KK1 и KK2. При этом якорь 6 больше не удерживается сердечником и под действием собственного веса и пружины 7 подвижной системы переходит в отключенное положение.
Двукратный разрыв в каждой фазе и закрытая камера 10 обеспечивают гашение дуги без особых устройств.
Нереверсивный пуск асинхронного двигателя с короткозамкнутым ротором.
Схема приведена на рисунке 1. Для работы сети необходимо включить рубильник (Q). При нажатии кнопки «пуск» (SB1) катушка контактора (KM) получает питание и замыкает главные контакты в силовой цепи, тем самым происходит подключение двигателя к сети. Одновременно замыкается блок-контакт (KM) цепи управления, которые шунтирует кнопку пуск (SB1).
Если температура обмотки двигателя превысит допустимые значения, то сработает тепловое реле и разомкнет свои контакты в цепи управления (KK1, KK2), тем самым обесточит катушку контактора (KM) и двигатель остановиться.
Для отключения необходимо нажать кнопку «стоп» (SB2).
Для защиты двигателя от токов короткого замыкания служат плавкие предохранители (FU).
Для защиты двигателя от перегрузок и от потери фазы применяют тепловые реле (KK1, KK2), которые включаются непосредственно в силовую цепь двигателя
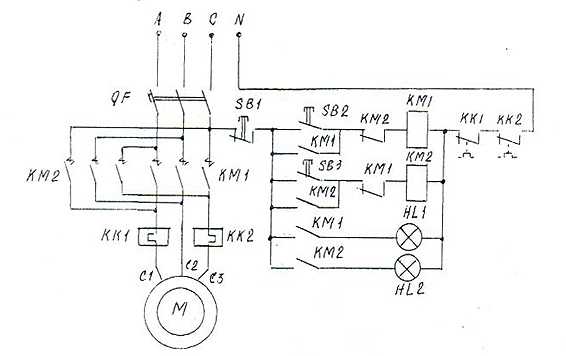
Работа реверсивной схемы управления АД.
Данная схема (смотри рисунок 2) управления АД с короткозамкнутым ротором обеспечивает вращение двигателя как в одну, так и другую сторону.
Силовая часть схемы (включается в сеть переменного тока автоматическим выключателем QF) состоит из электродвигателя М, обмотка статора которого включается в сеть через две группы силовых контактов: контактов КМ1, при замыкании которых ротор электродвигателя вращается в одном направлении (вперед), и контактов КМ2, при замыкании которых ротор электродвигателя вращается в другом направлении (назад) и тепловые реле КК.
Схема управления состоит из магнитных пускателей КМ1, КМ2 и их блок-контактов КМ1, КМ2; пусковых кнопок SB2 «Вперед» и SB3 «Назад»; кнопки «Стоп» SB1.
Для запуска электродвигателя сначала включают автоматический выключатель QF, потом нажимают кнопку SB2 или SB3 (в зависимости от выбранного направления вращения ротора электродвигателя). При нажимании кнопки SB2 включается магнитный пускатель КМ1, который своими главными контактами подключает двигатель к сети, тем самым осуществляя его пуск. Замыкающий блок-контакт КМ1 шунтирует при этом пусковую кнопку. Выключение двигателя осуществляется кнопкой SB1. Для пуска двигателя в другом направлении необходимо нажать кнопку SB3, которая включает магнитный пускатель КМ2.
Размыкая блок-контакт SB2 и SB3, которые подключены к цепи катушек магнитных пускателей КМ2 и КМ1 соответственно, предотвращают одновременное включение обоих магнитных пускателей, которое может привести к короткому замыкании в цепи двигателя.
Защита электродвигателя от перенапряжения осуществляется тепловыми реле КК, которые срабатывают, и разомкнут свои размыкающие контакты КК, и отключат катушку магнитного пускателя и электродвигатель остановится, потому что будет отключен от сети.
а) б)
Рисунок 3. Магнитный пускатель: а) электрическая схема; б) конструкция: 1 — основание; 2 — неподвижные контакты; 3 — пружина; 4 — магнитный сердечник; 5 — катушка; 6 — якорь; 7 — возвратная пружина; 8 — контактный мостик; 9 — пружина; 10 — дугогасительная камера; 11 — нагревательный элемент
Ход работы
1. Ознакомиться с конструкцией и принципом действия магнитного пускателя (рисунок 3).
2. Ознакомиться со схемой исследования. Определить назначение и принцип действия отдельных элементов схемы и их контактов (рисунок 1).
3. Собрать цепь для нереверсивного управления ЭД соответственно рисунка 1. После проверки схемы преподавателем провести опыт.
4. Собрать цепь реверсивного управления ЭД соответственно рисунка 2. После проверки схемы преподавателем провести опыт.
5. Сделать вывод соответственно выполненной работы и полученных результатов проведенного опыта.
Содержание отчета
Отчет должен содержать: тему лабораторной работы, цель работы, схему электрических соединений магнитного пускателя и реверсивную схему управления ЭД, описание проведенного опыта управления асинхронным двигателем с короткозамкнутым ротором с помощью магнитных пускателей, вывод.
Вывод:
Дать ответ на контрольные вопросы:
1. Какой магнитный пускатель называется
а) нереверсивным?
б) реверсивным?
2. Объясните работу схемы при пуске, реверсе и остановке электродвигателя.
3. Зачем шунтируют кнопку SB2 и SB3?
4. Какие виды защиты электродвигателя предусмотрены в данной схеме управления.
5. Какие аппараты использовались при сборке электрических схем?
ЛАБОРАТОРНАЯ РАБОТА № 10
Nothing found for Wp Content Uploads 2018 02 %25D0%25Ad%25D0%25Bb%25D0%25B5%25D0%25Ba%25D1%2582%25D1%2580%25D0%25B8%25D1%2587%25D0%25B5%25D1%2581%25D0%25Ba%25D0%25B8%25D0%25B5 %25D0%25Bc%25D0%25B0%25D1%2588%25D0%25B8%25D0%25Bd%25D1%258B %25D0%25B8 %25D1%2581%25D1%2585%25D0%25B5%25D0%25Bc%25D1%258B %25D1%2583%25D0%25Bf%25D1%2580%25D0%25B0%25D0%25B2%25D0%25Bb%25D0%25B5%25D0%25Bd%25D0%25B8%25D1%258F Pdf
Инструктаж машиниста подъемных установок
View More
Модульные контакторы
View More
защита электродвигателя
View More
Как выбрать сечение провода
View More
Стабилизатор напряжения
View More
Переменный ток.
 Откуда берется синусоида?
Откуда берется синусоида?
View More
как читать электрические схемы
View More
как правильно читать электронные схемы
View More
определение начала и конца фазных обмоток асинхронного электродвигателя
View More
тепловая защита электродвигателя
View More
Прибор для выверки соосности валов
View More
Электрические двигатели
View More
Как рассчитать сечение кабеля
View More
Тепловое реле для защиты двигателей
View More
Тепловое реле РТТ32П
View More
Контактор МК4-10
View More
Динамическое торможение
View More
Подключение двигателя 380 на 220
View More
Редуктор 1/1
View More
Редуктор
View More
зануление и заземление ч3.

View More
зануление и заземление ч2.
View More
Зануление и заземление ч1.
View More
Страницы
- 2Ц-3,5х1,8 Экзаменационные билеты. Механизм перестановки барабанов. Назначение и устройство.
- 2Ц6х2,8 Замена тормозных колодок, описание работ ПОР
- Search Results
- Автоматизация подъемных установок
- Аппаратура управления пневмоприводом тормоза
- Аппаратура управления подъемными установками. Контакторно-релейная аппаратура (КРА)
- Асинхронный двигатель
- Б.1.2.Максимальная токовая защита. Что такое “0” защита эл. двигателя. Релейная защита.
- Б2.2Реле утечки
- Баковые масляные выключатели
- Библия релейной защиты и автоматики
- Билеты машинисту п/у
- Аппарат задания и контроля типа АЗК-1:какие функции он выполняет.
- Асинхронный электродвигатель. Принцип работы. Динамическое торможение.
- Б.1.1Классификация подъемных установок: по назначению, по типу.
- Пульт машиниста: назначение, аппараты и приборы на пульте. Контрольноизмерительная аппаратура.
- Что проверяет машинист при приеме смены.
- Пульт машиниста: назначение, аппараты и приборы на пульте. Контрольноизмерительная аппаратура.
- Блокировки на п/у. Защиты на п/у.
- Движение бадей в стволе
- Документация на п/у.
- Редукторы. Назначение. Сочленение с двигателем. Чем проверить уровень масла в редукторе. Соединительные муфты. Тахогенератор.
- Требования предъявляемые к прицепным устройствам.
- Бадьи и требования к ним.
- Указатель глубины, назначение его элементов.
- Что такое концевая нагрузка.
- Блокировка нулевого положения командоконтроллера подъемного двигателя
- Блокировка от залипания ускоряющих контакторов
- Блокировка от чрезмерного износа тормозных колодок ВИК
- Блокировка положения рукоятки рабочего тормоза
- Вентиляционный журнал
- Вентиляционный надзор
- Взрывные работы в подземных выработках
- Виды инструктажей
- Во время замены канатов рассоединив барабаны нужно или нет отключать АЗК
- Водоотлив
- Вопрос-Ответ БАРНО электродвигателя
- Вскрытие участков с потушенными пожарами
- Высоковольтные реверсоры
- Генераторы и двигатели постоянного тока
- Гидропривод тормоза. Допустимый уровень масла. Давления масла
- Гидропривод тормоза. Допустимый уровень масла. Допустимое давление масла.
- Двухфазные схемы максимальной токовой защиты
- Действия машиниста в аварийной ситуации
- Действия машиниста в ремонтное время
- Действия машиниста подъема во время аварийной остановки подъемного двигателя во время выдачи груза и людей
- Демпфер рабочего тормоза подъемных машин НКМЗ
- Диаграммма скорости при предохранительном торможения
- Допускаемые зазоры между максимально выступающими частями подъемных сосудов, крепью и расстрелами в стволах вертикальных шахт
- Допустимые потери давления при подключении РДУ к воздушной сети
- Допустимые скорости движения ПС по вертикальным и наклонным выработкам
- Доставка взрывчатых материалов на подземных работах
- Доставка ВМ к местам работы
- ЕПБ
- Горные выработки
- ЕПБ при взрывных работах
- ЕПБ. Инструкция по составлению планов ликвидации аварий
- ЕПБ. Инструкция по составлению паспортов крепления и управления кровлей подземных горных выработок
- Журнал записи лиц, не сдавших светильники по окончании смены
- Журнал записи результатов осмотра крепи и состояния выработок
- Журнал записи результатов осмотра подъемной установки
- Журнал записи результатов осмотра подъемных канатов и их расхода
- Журнал записи результатов осмотра состояния стволов шахт
- Журнал регистрации ознакомления рабочих с запасными выходами
- Журнал учета работы вентилятора
- Задайте вопрос
- Заземление
- Замыкание витков обмотки
- Запас прочности каната
- Защита кабелей, электродвигателей и трансформаторов
- Защита минимального напряжения
- Защита от переподъема, назначение концевых выключателей. Как проверить защиту от переподъема.Что такое высота переподъема,место установки концевых выключателей.
- Защита от провисания струны и напуска каната
- Защита электродвигателей
- Защита электродвигателей напряжением ниже1000в
- Защита электродвигателей от замыканий одной фазы на землю
- Защита электродвигателей от коротких замыканий между фазами
- Защита электродвигателей от перегрузки
- Защитные средства и требования предъявляемые к ним
- Изготовление боевиков, зажигательных и контрольных трубок
- Измерение и регулировка воздушного зазора
- Измерение сопротивления постоянному току обмоток
- Инструкция о порядке хранения, использования и учета взрывчатых материалов
- Инструкция по ОТ для стволовой
- Инструкция по отбору проб рудничного воздуха
- Инструкция по охране труда для машиниста подъемной машины
- Инструкция по проверке действия реверсивных устройств вентиляторных установок
- Инструкция по производству сварочных и газопламенных работ в подземных выработках и надшахтных зданиях
- Инструкция по противопожарной охране шахт
- Инструкция по составлению вентиляционных планов
- Инструкция по устройству, осмотру и измерению сопротивления шахтных заземлений
- Исполнительный механизм тормоза, материал тормозных колодок
- Исполнительный механизм тормоза, материал тормозных колодок. Защита от износа колодок ВИК
- Исполнительный огран тормоза 2Ц-3,5х1,8
- Исполнительный орган тормоза с пружинным приводом
- Испытание тормозных устройств
- Испытания рудничных канатов
- Испытания тормозных устройств подземных подъемных установок
- Как осуществляется проверка тормозной системы и защитных устройств
- Как откорректировать подъемную установку 2Ц-4х1.8 НКМЗ
- Как тушить возгорание электродвигателей “Типовая инструкция по эксплуатации электродвигателей”
- Камеры для электрических машин и подстанций
- Канаты и прицепные устройства для спуска и подъема людей и грузов в вертикальных и наклонных выработках
- Канаты. Техническая информация
- Комплектация пожарных щитов
- Контакторы переменного тока
- Контакторы постоянного тока
- Контроль за состоянием рудничной атмосферы и контрольно-измерительная аппаратура.
- Контрольно-измерительная аппаратура
- Короткое замыкание между витками на токосъемных кольцах
- Кто имеет право давать распоряжения на переключения устройств
- Литература
- Максимальная токовая защита линий
- максимальная токовая защита с блокировкой минимального напряжения
- Малообъемные масляные выключатели
- Масляные выключатели до 10 кВ
- Машины постоянного тока
- Мгновенная токовая отсечка
- Медицинская помощь
- Мероприятия по ликвидации аварий в начальной стадии
- Меры безопасности при обслуживании механического оборудования п/у
- Методика наладки схемы автоматизации. Устройства программирования скорости.
- Надзор за канатами
- Надзор и контроль за электрооборудованием
- Назначение аварийного подъема
- Назначение блокировки контроля давления в пневмосистеме
- Назначение и принцип действия пружинно-грузового привода тормоза
- Назначение и проверка защиты контроля давления
- Назначение и проверка защиты от исчезновения возбуждения подъемного двигателя
- Назначение и устройство жидкостного реостата
- Назначение рабочего и предохранительного тормоза
- Назначение устройство и принцип действия дуговой блокировки
- Назначение, устройство, принцип действия регулятора давления РДУ
- Наладка автоматизированных подъемных установок
- Наладка комплекта электрооборудования для управления подземными подъемными машинами и лебедками
- Наладка электродинамического торможения
- Напочвенные дороги с канатным тяговым ограном ДКНЛ1
- Неисправности в релейно-контакторных схемах управления подъемных установок
- Неисправности концевых выключателей
- Неисправности тормозных устройств шахтных п/у
- Неполадки асинхронных трехфазных электродвигателей
- Неполадки обмотки
- Неполадки подшипников
- Неполадки ротора (электродвигатель с короткозамкнутым ротором)
- Неселективные отсечки
- Обо мне
- Общая оценка и область применения максимальной токовой защиты
- Общее устройство ПУ с разрезным барабаном
- Общее устройствои техническая характеристика двухбарабанной и однобарабанной ПМ
- Общие правила проветривания подземных выработок
- Общие санитарные правила
- Обязанности главного инженера рудоуправления
- Обязанности главного механика шахты
- Обязанности главного энергетика шахты
- Обязанности горного диспетчера
- Обязанности заместителя или помощника главного инженера шахты
- Обязанности командира ВГСЧ
- Обязанности машиниста подъема при эксплуатации П/У и текущем ремонте
- Обязанности начальника ПВС
- Обязанности начальника участка, помощника начальника, сменного горного мастера
- Обязанности начальника шахты
- Обязанности ответственного руководителя работ по ликвидации аварий
- Обязанности прочих лиц, участвующих в ликвидации аварии
- Ограничитель скорости ОСЭРП
- Ознакомление с планом ликвидации аварий и проверка знаний
- Освещение лампами, питаемыми от электрической сети
- Основные узлы и детали подъемной машины
- Особенности наладки подземных подъемных установок
- Отсечки с выдержкой времени
- Охрана труда в электроустановках
- Назначение роторных сопротивлений.
- Основные и дополнительные средства защиты в электроустановках до 1000 В. и выше 1000 В.
- Правила пользованием огнетушителем.
- Назначение роторных сопротивлений.
- Первая помощь пострадавшим
- Первая помощь при отравлении газами в шахте
- Передвижение и перевозка людей и грузов по наклонным и вертикальным выработкам.
- Перекос фаз. Причины возникновения, устранение, защита.
- Перечень работ при ревизии редуктора РМ-850 со вскрытием крышек и заменой масла
- Персонал для производства взрывных работ и для работ, связанных с хранением взрывчатых материалов
- Персонал для руководства взрывными работами
- Пневматический привод тормоза ПМ (НКМЗ, ЛКУ)
- Поведение максимальной защиты при двойных замыканиях на землю
- Повреждения, возникающие из-за неправильно установленных деталей трансмиссии или неточного выравнивания электродвигателя
- Подъемные машины и лебедки
- Порядок допуска взрывчатых материалов к применению
- Порядок и меры безопасности при работах по техническому обслуживанию вертикальных стволов.
- Порядок приема, отпуска и учета взрывчатых материалов
- Правила обращения с взрывчатыми материалами
- Правила спуска и подъема ВМ по вертикальному стволу
- Правила спуска и подъема людей
- Предупреждение и тушение рудничных пожаров
- Предупреждение падения людей и предметов в горные выработки
- Привод тормоза. Источники каких сил используются в тормозных приводах.
- Приводы к разъединителям
- Принцип работы системы Г-Д (генератор двигатель)
- Принцип схемы тормозной системы ПМ
- Принципиальная схема цепи защиты КПМ
- Прицепные устройства подъемных сосудов
- Причины износа тормозов,муфт включения
- Проверка блокировок наличия тока Дт.
- Проверка правильности включения обмоток. Асинхронные и синхронные двигатели.
- Проверка соосности валов
- Проверка сопротивления изоляции
- Проветривание подготовительных выработок
- Прокладка гибких резиновых кабелей
- Прокладка кабелей в выработках с уклоном более 45 градусов
- Прокладка кабелей в горизонтальных и наклонных выработках
- Профилактика профзаболеваний
- Пружинно-гидравлический привод тормоза
- Пружинно-гидравлический привод тормоза, источники каких сил используются в тормозных приводах
- Пульт управления подземной подъемной машиной ППМ-3
- Пуск ПД в режиме ручного управления
- Работа аварийной кнопки и аварийного ключа
- Разлом вала
- Разъединители
- Ревизия и наладка маслосмазки
- Ревизия и наладка подшипников качения
- Ревизия и наладка подшипников скольжения валов
- Ревизия и наладка редуктора
- Ревизия и наладка соединительных муфт
- Ревизия и наладка тормоза с пружинно-гидравлическим приводом
- Ревизия и наладка щеточного аппарата, коллектора и контактных колец
- Ревизия и наладка электрической части подъемных установок. Распределительные устройства (ру)
- Ревизия канатоведущих шкивов
- Ревизия механических указателей глубины
- Ревизия рычажно-шарнирного механизма
- Ревизия тормозного обода
- Ревизия тормозных колодок
- Ревизия цилиндрических барабанов
- Ревизия, наладка и испытание шахтных подъемных установок
- Регулировка исполнительного органа тормоза
- Реле времени
- Релейная защита
- Ремонтная стволовая сигнализация
- Рудничный воздух
- Рудничный транспорт и подъем
- Руководство по техническому обслуживанию и ремонту шахтных подъемных установок
- Ручные способы искусственного дыхания
- Самоспасатели
- Санитарно-бытовые помещения
- Сбои в работе токосъемных колец ротора
- Сигнальные приборы стволовой сигнализации
- Силовые трансформаторы
- Синхронный двигатель
- Система защит и блокировок на подъемной установке.
- Совершенствование аппаратуры управления малыми шахтными подъемными машинами и лебедками
- Соединение кабелей
- Составление плана ликвидации аварии
- Способы электрического торможения асинхронного двигателя
- Справочное пособие машинисту
- Стационарные подъемные машины и установки
- Сушка электрических машин
- Сушка, измельчение, просеивание и наполнение оболочек взрывчатыми веществами
- Схема разгона двигателя с РТУ и восемью реле ускорений
- Схема разгона двигателя с РТУ и двумя реле ускорения
- Схема разгона двигателя с трехобмоточными реле
- Схема РОС повышенной надежности
- Схема РОС повышенной надежности
- Схема трехфазной защиты с зависимой характеристикой
- Схема трехфазной защиты с независимой выдержкой времени
- Схемы руководств оборудования по подъемам
- Телефонная связь и сигнализация
- Тиристорные выпрямители для динамического торможения асинхронных подъемных машин
- Ток срабатывания защиты
- Токовые реле
- Тормозные устройства, требования предъявляемые к ним.
- Транспортирование ВМ на территории постоянных складов
- Трансформаторы напряжения (ТН)
- Трансформаторы тока (ТТ)
- Трансформаторы, принцип действия,где на ПМ применяются
- Требования безопасности по применению электродинамического торможения
- Требования предъявляемые к переносным заземлениям. Порядок наложения и снятия.
- Требования предъявляемые к подъемным сосудам
- Требования предъявляемые к сосудам работающим под давлением сжатого воздуха
- Тушение подземных пожаров
- Угол девиации каната
- Указательные реле
- Уничтожение взрывчатых материалов
- Уравновешивающие канаты П/У и требования к ним
- Установка эластичных прокладок между фрикционными накладками и тормозными балками
- Устройства избирательного предохранительного торможения и ограничителя тормозного момента
- Устройства с силовыми магнитными усилителями
- Устройство сигнализации и блокировки ляд на проходческой подъемной установке
- Устройство, основанное на гидравлическом подпоре золотника крана предохранительного торможения
- Устройство, основанное на задержке отключения тормозного магнита
- Устройство, принцип действия ПД. Схема подключения его в сеть
- Формы журналов Журнал регистрации инструктирования рабочих
- Характерные неисправности электродвигателей и их устранение
- Хранение взрывчатых материалов на местах работ в подземных выработках
- Центровка вертикального электродвигателя с механизмом
- Цепи защиты подъемной машины и требования предъявляемые к ним
- Чем отличается командоаппарат от командоконтроллера
- Что такое частичное и полное снятие напряжения
- Шахтные воды, питьевое водоснабжение и ассенизация
- Шахтные подъемные машины
- Экзаменационные вопросы машиниста п/у
- Электрические машины и аппараты
- Электрические машины и схемы управления
- Электрические машины.
- Электрические проводки
- Электрический ограничитель скорости типа РОС, принцип работы, назначение, ежесменная проверка ЭОС-3.
- Б.2.1Что входит в понятие стволовая сигнализация, виды сигнализации.
- Параметры электродвигателя
- Электрогидравлические системы HR7K/B и HR9K/B
- Электродинамическое торможение. Устройство с генератором постоянного тока
- Электромагнитные промежуточные реле
- Электромагнитные реле
- Электропневматические регуляторы давления РДБВ
- Электропривод
- Электроустановки
- Элементы BE 100 и BE 200 для дискового Тормоза
- ЭОС-3
 Принцип работы. Динамическое торможение.
Принцип работы. Динамическое торможение. Допустимый уровень масла. Давления масла
Допустимый уровень масла. Давления масла Инструкция по составлению паспортов крепления и управления кровлей подземных горных выработок
Инструкция по составлению паспортов крепления и управления кровлей подземных горных выработок Защита от износа колодок ВИК
Защита от износа колодок ВИК Устройства программирования скорости.
Устройства программирования скорости.

 Распределительные устройства (ру)
Распределительные устройства (ру)
 Схема подключения его в сеть
Схема подключения его в сеть Устройство с генератором постоянного тока
Устройство с генератором постоянного токаСтатьи по разделам
- Рубрики: Uncategorized
- Доброго времени суток !
3D FlipBook
- Рудничные подъемные установки
- Справочник механика
- Dräger X-am® 5000 (MQG 0010)
- Маркшейдерские работы при установке и эксплуатации шахтного подъемного оборудования
- Редукторы РМ паспорт
- Единые нормы времени и расценки
- Единые нормы выработки дополнение к УКНВ
- Единые нормы выработки для шахт
- Проверочный расчет тормоза шахтной подъемной машины
- Технологическая инструкция по дефектоскопии деталей тормозных устройств подъемных машин
- Тормозные устройства справочник
- Инструкция по эксплуатации стальных канатов
- Инструкция по эксплуатации стальных канатов в шахтных стволах
- МОНТАЖ И РЕМОНТ ГОРНЫХ МАШИН И ЭЛЕКТРООБОРУДОВАНИЯ
- Горнопроходческие машины и комплексы
- Техническое обслуживание подъемных сосудов
- Должностная инструкция — Машинист подъемной машины первой группы подъемов
- Должностная инструкция — Машинист подъемной машины второй группы подъемов
- Должностная инструкция — Машинист подъемной машины 4-го разряда
- Должностная инструкция — Машинист подъемной машины 3-го разряда
- Цепь защиты подъемного двигателя
- ОПЕРАТИВНЫЕ ПЕРЕКЛЮЧЕНИЯ В ЭЛЕКТРОУСТАНОВКАХ ПРАВИЛА ВЫПОЛНЕНИЯ
- ПРАВИЛА безопасности в угольных шахтах
- Шахтный подъем
- Шахтные подъемные установки
- Средства защиты применяемые в ЭУ
- Программа обучения по электробезопасности
- Билеты Электробезопасность
- 68 вопросов по ПТБЭУП и ПУЭ
- 68 вопросов по ПТБЭУП и ПУЭ
- Погрузка и подъем
- Силовые трансформаторы
- Машины постоянного тока
- Синхронный двигатель
- Асинхронный двигатель
- Канаты. Техническая информация
- Электрические машины и схемы управления
- Шахтные подъемные машины
- Руководство по техническому обслуживанию шахтных п/у
- Библия релейной защиты и автоматики
- Электропривод
- Электрогидравлические системы
- Напочвенные дороги с канатным тяговым органом ДКНЛ1, ДКНУ1, ДКНУ2
- Требования предъявляемые к сосудам работающим под давлением сжатого воздуха
- Стационарные подъемные машины и установки
- Справочное пособие машинисту
- Погрузка и подъем
 Техническая информация
Техническая информацияГорная ЭлектроМеханика
Схема управления асинхронным двигателем с короткозамкнутым ротором. Схема пуска асинхронного двигателя
Схема управления электродвигателем
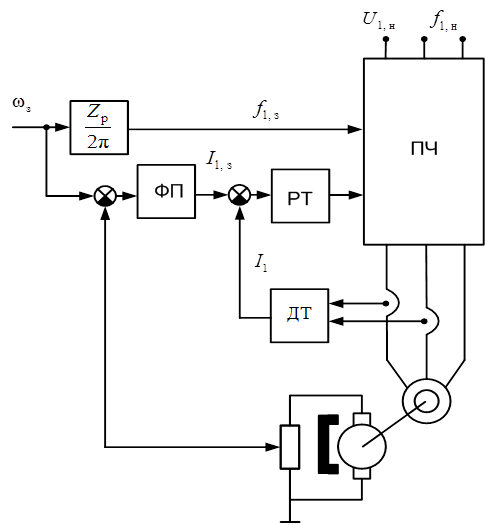
Функциональная cхема управления асинхронным двигателем с короткозамкнутым ротором изображена на рисунке 1.
Рис.1.Функциональная схема управления асинхронным двигателем.
Трёхфазный переменный ток подаётся на автоматический выключатель, который применяется для подключения трёхфазного асинхронного двигателя. В автоматическом выключателе помимо системы контактов, имеются комбинированные расцепители (тепловой и электромагнитный), что обеспечивает автоматическое отключение при длительной перегрузке и коротком замыкании. От автоматического выключателя питание подаётся на магнитный пускатель. Магнитный пускатель — аппарат для дистанционного управления двигателем. Он осуществляет пуск, остановку и защиту двигателя от перегрева и сильного снижения напряжения. Основная часть магнитного пускателя — трёхполюсный электромагнитный контактор. От магнитного пускателя управление передаётся трёхфазному асинхронному электродвигателю переменного тока. Асинхронный двигатель отличается простотой конструкции и несложностью обслуживания. Он состоит из двух основных частей — статора — неподвижной части и ротора — вращающейся части. Статор имеет пазы, в которые укладывается трёхфазная статорная обмотка, подключаемая к сети переменного тока. Эта обмотка предназначена для создания вращающего кругового магнитного поля.
В автоматическом выключателе помимо системы контактов, имеются комбинированные расцепители (тепловой и электромагнитный), что обеспечивает автоматическое отключение при длительной перегрузке и коротком замыкании. От автоматического выключателя питание подаётся на магнитный пускатель. Магнитный пускатель — аппарат для дистанционного управления двигателем. Он осуществляет пуск, остановку и защиту двигателя от перегрева и сильного снижения напряжения. Основная часть магнитного пускателя — трёхполюсный электромагнитный контактор. От магнитного пускателя управление передаётся трёхфазному асинхронному электродвигателю переменного тока. Асинхронный двигатель отличается простотой конструкции и несложностью обслуживания. Он состоит из двух основных частей — статора — неподвижной части и ротора — вращающейся части. Статор имеет пазы, в которые укладывается трёхфазная статорная обмотка, подключаемая к сети переменного тока. Эта обмотка предназначена для создания вращающего кругового магнитного поля. Вращение кругового магнитного поля обеспечивается сдвигом по фазе друг относительно друга каждой из трёх систем трёхфазного тока на угол, равный 120 градусам.
Вращение кругового магнитного поля обеспечивается сдвигом по фазе друг относительно друга каждой из трёх систем трёхфазного тока на угол, равный 120 градусам.
Обмотки статора для подключения к напряжению сети 220В соединены треугольником (Рис.8). В зависимости от типа обмотки ротора, машины могут быть с фазным и короткозамкнутым ротором. Несмотря на то, что двигатель с фазным ротором обладает лучшими пусковыми и регулировочными свойствами, двигатель с короткозамкнутым ротором проще и надёжнее в эксплуатации, а также дешевле. Я выбрал двигатель с короткозамкнутым ротором, так как в настоящее время большинство изготовляемых промышленностью двигателей являются двигателями с короткозамкнутым ротором. Обмотка ротора выполняется по типу беличьего колеса, в пазы ротора заливают под давлением горячий алюминий. Проводники обмотки ротора соединены, образуя трёхфазную систему. Двигатель приводит в движение вентилятор. Вентиляторы, применяемые на судах, различают в зависимости от создаваемого ими напора. Смонтированный в схеме вентилятор является вентилятором низкого давления. Обычно вентиляторы не регулируются и не реверсируются, поэтому их привод имеет простейшую схему управления, которая сводится к пуску, остановке и защите.
Смонтированный в схеме вентилятор является вентилятором низкого давления. Обычно вентиляторы не регулируются и не реверсируются, поэтому их привод имеет простейшую схему управления, которая сводится к пуску, остановке и защите.
Принципиальная электрическая схема нереверсивного управления трёхфазным асинхронным электродвигателем с короткозамкнутым ротором посредством автоматического выключателя и магнитного пускателя с двухполюсным тепловым реле представлена на рисунке 2.
От силового щита питание подаётся на автоматический выключатель с тепловыми и электромагнитными расцепителями максимального тока. Схема магнитного пускателя составлена с соблюдением рекомендуемых условных графических обозначений элементов схем автоматического управления двигателем. Здесь все элементы одного и того же аппарата обозначены одинаковыми буквами.
Рис.2.Схема управления асинхронным двигателем с короткозамкнутой обмоткой ротора.
Так, главные замыкающие контакты линейного трёхполюсного контактора, находящиеся в силовой цепи, его катушка и вспомогательные замыкающие контакты, находящиеся в цепи управления, обозначены буквами КЛ. Нагревательные элементы теплового реле, включённые в силовую цепь, и остающиеся размыкающие контакты с ручным возвратом этого же реле в исходное положение, которые находятся в цепи управления, обозначены буквами РТ. При включенном трёхполюсном выключателе после нажатия пусковой кнопки КнП включается катушка линейного трёхполюсного контактора КЛ и его главные замыкающие контакты КЛ присоединяют обмотку статора трёхфазного асинхронного двигателя АД к питающей сети в результате чего ротор приходит во вращение. Одновременно замыкаются вспомогательные замыкающие контакты КЛ, шунтирующие пусковую кнопку КнП, что позволяет её отпустить. Нажатие остановочной кнопки КнС отключает цепь питания катушки КЛ, вследствие чего якорь контактора выпадает, главные замыкающие контакты КЛ размыкаются и обмотка статора двигателя отключается от питающей сети.
Нагревательные элементы теплового реле, включённые в силовую цепь, и остающиеся размыкающие контакты с ручным возвратом этого же реле в исходное положение, которые находятся в цепи управления, обозначены буквами РТ. При включенном трёхполюсном выключателе после нажатия пусковой кнопки КнП включается катушка линейного трёхполюсного контактора КЛ и его главные замыкающие контакты КЛ присоединяют обмотку статора трёхфазного асинхронного двигателя АД к питающей сети в результате чего ротор приходит во вращение. Одновременно замыкаются вспомогательные замыкающие контакты КЛ, шунтирующие пусковую кнопку КнП, что позволяет её отпустить. Нажатие остановочной кнопки КнС отключает цепь питания катушки КЛ, вследствие чего якорь контактора выпадает, главные замыкающие контакты КЛ размыкаются и обмотка статора двигателя отключается от питающей сети.
Основные элементы схемы и их назначение
Автоматический выключатель
— аппарат для нечастой ручной коммутации электрических цепей и автоматической защиты их при коротких замыканиях и длительной перегрузке. Назначение автоматического выключателя, применённого в схеме, описано в таблице 1.
Назначение автоматического выключателя, применённого в схеме, описано в таблице 1.
Таблица1. Область применения автоматического выключателя.
Как видно из таблицы 1 автомат не отключается при резком снижении напряжения, так как расцепитель минимального напряжения в применяемом автоматическом выключателе отсутствует. Защиту при значительном снижении или исчезновении напряжения питающей сети осуществляет магнитный пускатель.
Автоматы используют при напряжении до 660В на номинальные токи от 15 до 600А, в помещениях с нормальной окружающей средой, так как они не приспособлены для работы в средах с едкими парами и газами, во взрывоопасных и незащищённых от попадания воды местах. Автоматы необходимо не реже 1 раза в год осматривать, чистить, смазывать шарнирные механизмы приборным маслом. Для своей схемы я выбрал автоматический выключатель серии АП-50. Внешний вид автомата показан на рисунке 3.
1- кнопка выключения, 2-кнопка включения, 3- реле, 4-искрогасительные камеры, 5-пластмассовый кожух
Рис3.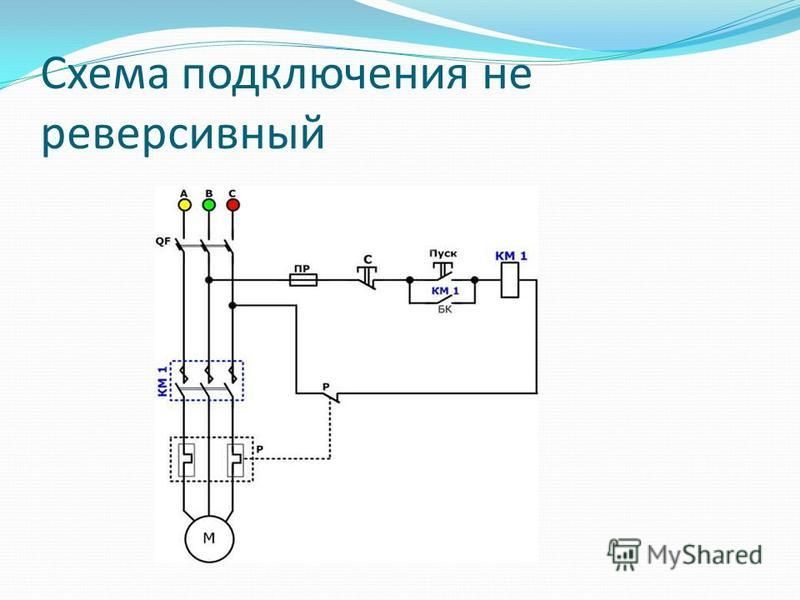 Внешний вид и устройство автомата АП-50.
Внешний вид и устройство автомата АП-50.
Он предназначен для защиты от перегрузок и токов короткого замыкания при U питающей сети до 500В, 50 гц на переменном токе, для ручного включения и отключения цепей, а главное для пуска и защиты трёхфазных асинхронных двигателей с короткозамкнутым ротором. Выключатель защищён пластмассовым кожухом. Наличие буквы Б в серии АП-50Б означает универсальное исполнение, при котором ввод и вывод проводов снизу и сверху через сальники типа СКВрт-33. Маркировка АП-50Б-3МТ означает наличие электромагнитных и тепловых расцепителей и число полюсов равное трём.
Магнитный пускатель
— коммутационный аппарат дистанционного управления, для частых включений и отключений электрооборудования, которым управляют с помощью отдельно расположенной кнопки. Это устройство для пуска, остановки и защиты электродвигателей. Назначение магнитного пускателя, применённого в схеме, представлено в таблице 2.
Типовые схемы управления электроприводов
с АД
АД с короткозамкнутым ротором малой и средней мощности пускаются прямым подключением к сети без ограничения пусковых токов. Схемы управления АД с фазным ротором средней и большой мощности должны предусматривать ограничение токов при их пуске, реверсе и торможении с помощью добавочных резисторов в цепи ротора.
Схемы управления АД с фазным ротором средней и большой мощности должны предусматривать ограничение токов при их пуске, реверсе и торможении с помощью добавочных резисторов в цепи ротора.
Реверсивная схема управления АД с короткозамкнутым ротором приведена на рисунке 8.9.
Рис. 8.9. Реверсивная схема управления АД
с короткозамкнутым ротором
Основным элементом
этой схемы является реверсивный магнитный пускатель, который включает в себя два линейных контактораКМ1 и КМ2 и два тепловых реле защиты КК. Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключением при ручном (неавтоматическом) управлении.
В схеме предусмотрена защита от перегрузок двигателя (реле КК) и коротких замыканий в цепи статора (автоматический выключатель QF) и управления (предохранители FA). Кроме того, схема управления обеспечивает и нулевую защиту от исчезновения (снижения) напряжения сети (контакторы КМ1и КМ2).
Пуск двигателя
при включенном автоматическом выключателе QF в условных направлениях «Вперед» или «Назад» осуществляется нажатием соответственно кнопок SB1 или SB2. Это приводит к срабатыванию контактора КМ1 или КМ2, подключению двигателя к сети и его разбегу.
Это приводит к срабатыванию контактора КМ1 или КМ2, подключению двигателя к сети и его разбегу.
Для реверса или торможения
двигателя вначале нажимается кнопка SB3, что приводит к отключению включенного до сих пор контактора (например, КМ1), после чего нажимается кнопка SB2. Это приводит к включению контактора КМ2 и подаче на АД напряжения источника питания с другим порядком чередования фаз. Магнитное поле двигателя изменяет направление вращения на противоположное, и начинается процесс реверса, состоящий из двух этапов: торможения противовключением и разбега в противоположную сторону.
В случае
необходимости только торможения
двигателя при достижении им нулевой скорости должна быть вновь нажата кнопка SB3, что приведет к отключению двигателя от сети и возвращению схемы в исходное положение. Если кнопка SB3 нажата не будет, то это приведет к разбегу двигателя в другую сторону, т.е. к его реверсу.
Во избежание короткого замыкания
в цепи статора, которое может возникнуть в результате одновременного ошибочного нажатия кнопок SB1 и SB2, в реверсивных магнитных пускателях иногда предусматривается специальная механическая блокировка. Она представляет собой рычажную систему, которая предотвращает втягивание одного контактора, если включен другой. В дополнение к механической блокировке в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления. Она предусматривает перекрестное включение размыкающих контактов аппарата КМ1 в цепь катушки аппарата КМ2 и наоборот.
Она представляет собой рычажную систему, которая предотвращает втягивание одного контактора, если включен другой. В дополнение к механической блокировке в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления. Она предусматривает перекрестное включение размыкающих контактов аппарата КМ1 в цепь катушки аппарата КМ2 и наоборот.
Отметим, что повышению надежности и удобства в эксплуатации способствует использование в схеме воздушного автоматического выключателя QF. Его наличие исключает возможность работы привода при обрыве одной фазы, при однофазном коротком замыкании, как это может иметь место при установке предохранителей, а также он не требует замены элементов (как в предохранителях при сгорании их плавкой вставки).
Схема управления АД, обеспечивающая прямой пуск и динамическое торможение в функции времени, приведена на рис. 8.10.
Рис. 8.10. Схема пуска и динамического торможения АД
Пуск двигателя
осуществляется нажатием кнопки SB1, после чего срабатывает линейный контактор КМ, подключающий двигатель к источнику питания. Одновременно с этим замыкание контакта КМ в цепи реле времени КТ вызовет его срабатывание и замыкание его контакта в цепи контактора торможения КМ1. Однако последний не срабатывает, так как перед этим разомкнулся в этой цепи размыкающий контакт КМ.
Одновременно с этим замыкание контакта КМ в цепи реле времени КТ вызовет его срабатывание и замыкание его контакта в цепи контактора торможения КМ1. Однако последний не срабатывает, так как перед этим разомкнулся в этой цепи размыкающий контакт КМ.
Для остановки двигателя
нажимается кнопка SB3, контактор КМ отключается, размыкая свои контакты в цепи статора двигателя и отключая тем самым его от сети переменного тока. Одновременно с этим замыкается контакт КМ в цепи аппарата КМ1 и размыкается контакт КМ в цепи реле КТ. Это приводит к включению контактора торможения КМ1, подаче в обмотки статора постоянного тока от выпрямителя V через резистор Rт и переводу двигателя в режим динамического торможения.
Реле времени КТ, потеряв питание, начинает отсчет выдержки времени. Через интервал времени, соответствующий времени останова двигателя, реле КТ размыкает свой контакт в цепи контактора КМ1, тот отключается, прекращая подачу постоянного тока в цепь статора. Схема возвращается в исходное положение.
Интенсивность динамического торможения регулируется резистором Rт, с помощью которого устанавливается необходимый постоянный ток в статоре двигателя.
Для исключения возможности одновременного подключения статора к источникам переменного и постоянного тока в схеме использована типовая блокировка с помощью размыкающих контактов КМ и КМ1, включенных перекрестно в цепи катушек этих аппаратов.
Схема управления пуском и торможением противовключением АД с фазным ротором в функции ЭДС приведена на рисунке 8.11.
Рис. 8.11. Схема управления пуском и торможением противовключением АД
с фазным ротором
После подачи напряжения включается реле времени КТ, которое своим размыкающим контактом разрывает цепь питания контактора КМ3, предотвращая тем самым его включение и преждевременное закорачивание пусковых резисторов в цепи ротора.
Включение двигателя
производится нажатием кнопки SB1, после чего включается контактор КМ1. Статор двигателя подсоединяется к сети, электромагнитный тормоз YB растормаживается, и начинается разбег двигателя.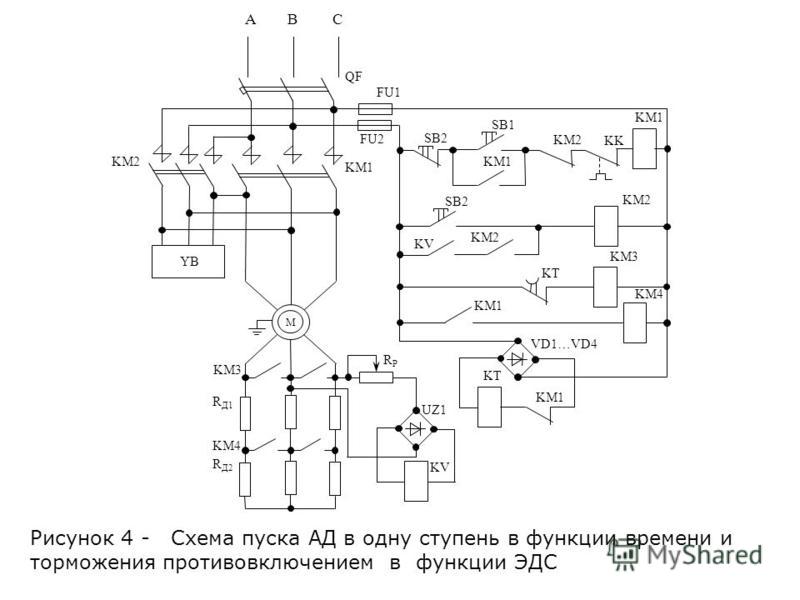 Включение КМ1 одновременно приводит к срабатыванию контактора КМ4, который своим контактом шунтирует ненужный при пуске резистор противовключения R
Включение КМ1 одновременно приводит к срабатыванию контактора КМ4, который своим контактом шунтирует ненужный при пуске резистор противовключения R
д2
, а также разрывает цепь катушки реле времени КТ. Последнее, потеряв питание, начинает отсчет выдержки времени, после чего замыкает свой контакт в цепи катушки контактора КМ3, который срабатывает и шунтирует пусковой резистор R
д1
в цепи ротора, и двигатель выходит на свою естественную характеристику.
Управление торможением
обеспечивает реле торможения KV, контролирующее уровень ЭДС (скорости) ротора. С помощью резистора R
р
оно отрегулировано таким образом, что при пуске, когда скольжение двигателя 0
Для осуществления торможения
двигателя нажимается сдвоенная кнопка SB2, размыкающий контакт которой разрывает цепь питания катушки контактора КМ1. После этого двигатель отключается от сети и разрывается цепь питания контактора КМ4, и замыкается цепь питания реле КТ. В результате этого контакторы КМ3 и КМ4 отключаются, и в цепь ротора двигателя вводится сопротивление R
д1
+ R
д2
.
Нажатие кнопки SB2 приводит одновременно к замыканию цепи питания катушки контактора КМ2, который, включившись, вновь подключает двигатель к сети, но уже с другим чередованием фаз сетевого напряжения на статоре. Двигатель переходит в режим торможения противовключением. Реле RY срабатывает и после отпускания кнопки SB2 будет обеспечивать питание контактора КМ2 через свой контакт и замыкающий контакт этого аппарата.
В конце торможения, когда скорость будет близка к нулю и ЭДС ротора уменьшится, реле КV отключится и своим размыкающим контактом разомкнет цепь катушки контактора КМ2. Последний, потеряв питание, отключит двигатель от сети, и схема придет в исходное положение. После отключения КМ2 тормоз УВ, потеряв питание, обеспечит фиксацию (торможение) вала двигателя.
На рисунке 8.12. приведена схема панели типа ПДУ 6220.
Панель типа ПДУ 6220
входит в состав нормализованной серии панелей управления двигателей с фазным и короткозамкнутым ротором и обеспечивает пуск двигателей в две ступени и динамическое торможение по принципу времени.
При подаче на схему напряжений 220 В и переменного тока 380 В (замыкание рубильников QS
1
и QS
2
и автомата QF) включается реле времени КТ1, чем подготавливается двигатель к пуску с полным пусковым резистором в цепи ротора. Одновременно с этим, если рукоятка командоконтроллера находится в нулевой (средней) позиции и максимально-токовые реле FА1-FА3 не включены, включится реле защиты КV от понижения питающего напряжения и подготовит схему к работе.
Рис. 8.12. Схема панели типа ПДУ 6220
Пуск двигателя
осуществляется по любой из двух искусственных характеристик или естественной характеристике, для чего рукоятка SА должна устанавливаться соответственно в положение 1, 2 или 3. При переводе рукоятки в любое из указанных положений SА включается линейный контактор КМ2, подключающий двигатель к сети, контактор управления тормозом КМ5, подключающий к сети катушку YА электромагнитного тормоза, который при этом растормаживает двигатель и реле времени КТ3, управляющее процессом динамического торможения.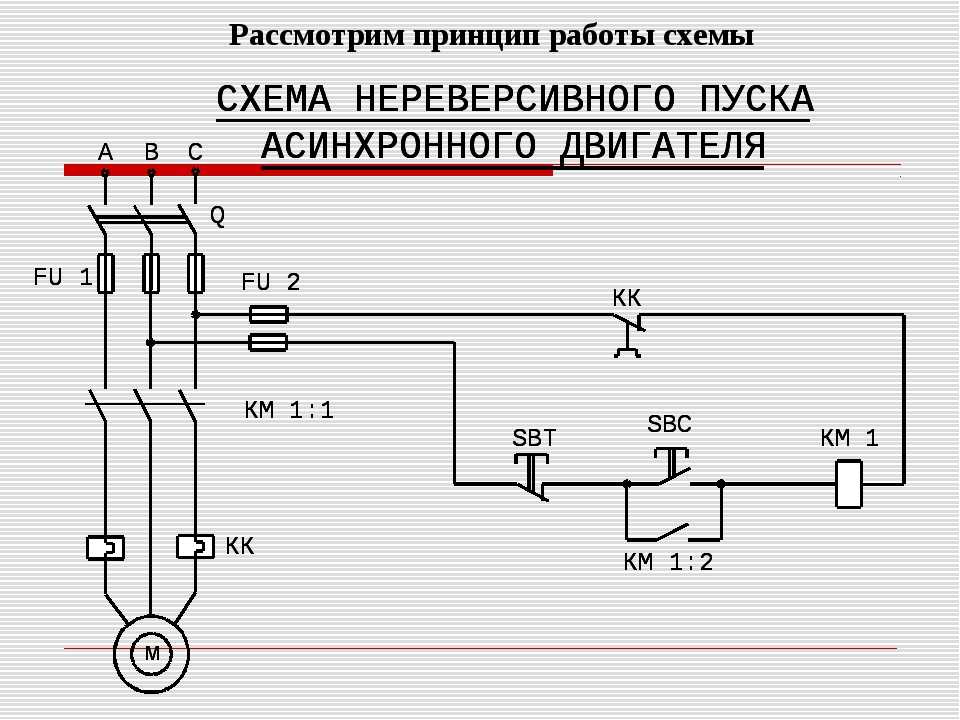 При переводе SА в положение 2 или 3 включаются контакторы ускорения КМ3 и КМ4, и двигатель начинает разгоняться.
При переводе SА в положение 2 или 3 включаются контакторы ускорения КМ3 и КМ4, и двигатель начинает разгоняться.
Торможение двигателя
происходит при переводе рукоятки SА в нулевое (среднее) положение. При этом отключатся контакторы КМ2 и КМ5 и включится контактор динамического торможения КМ1, который подключит двигатель к источнику постоянного тока. В результате этого будет идти интенсивный процесс комбинированного (механического и динамического) торможения двигателя, который закончится после отсчета реле КТ3 своей выдержки времени, соответствующей времени торможения.
Схема асинхронного электропривода с тиристорным пусковым устройством приведена на рисунке 8.13.
к ак
Рис. 8.13. Схема асинхронного ЭП
с тиристорным пусковым устройством
Эффективным методом формирования желаемых графиков изменения тока и момента двигателя в переходных режимах является
регулирование напряжения
на его статоре
с помощью тиристорных пусковых устройств (ТПУ).
Чаще всего это делается для ограничения тока и момента двигателя при пуске («мягкий» способ пуска), хотя с помощью этих устройств можно обеспечить и повышение момента двигателя при пуске («жесткий» способ пуска).
Тиристорное пусковое устройство включается
между источником питания (сетью переменного тока) с напряжением U
1
и статором двигателя. В нереверсивном ТПУ его силовую часть образуют три пары встречно-параллельно включенных тиристоров VS1-VS6, управление которыми осуществляется импульсами напряжения, поступающими на них от системы импульсно-фазового управления (СИФУ). Ограничение тока и момента осуществляется за счет снижения подводимого к двигателю напряжения, что достигается соответствующим изменением во времени угла управления тиристорами.
Напряжение при пуске может изменяться по различным законам
– линейно нарастать от нуля до сетевого, быть пониженным в течение всего времени пуска или изменяться по так называемому бустерному варианту, при котором для облегчения пуска двигателя на него вначале подается скачком некоторое напряжение, которое затем продолжает нарастать уже по линейному закону. В замкнутой системе может быть обеспечено и поддержание тока статора на заданном уровне.
В замкнутой системе может быть обеспечено и поддержание тока статора на заданном уровне.
8.6. Регулирование координат асинхронного двигателя
с помощью резисторов
Данный способ регулирования координат, называемый часто реостатным, может быть осуществлен введением добавочных активных резисторов в статорные или роторные цепи АД (см. рис. 8.14). Он привлекает в первую очередь простотой своей реализации, отличаясь в то же время невысокими показателями качества регулирования и экономичностью.
Рис. 8.14. Схемы включения АД с фазным ротором (а)
и с короткозамкнутым ротором (б)
1д
в цепь статора
применяется главным образом для регулирования (ограничения) в переходных процессах тока и момента АД с короткозамкнутым ротором.
Все искусственные электромеханические характеристики располагаются в первом квадранте ниже и левее естественной. С учетом того, что скорость идеального холостого хода ω
0
при включении R
1д
не изменяется, получаемые искусственные электромеханические характеристики можно представить семейством кривых (рис.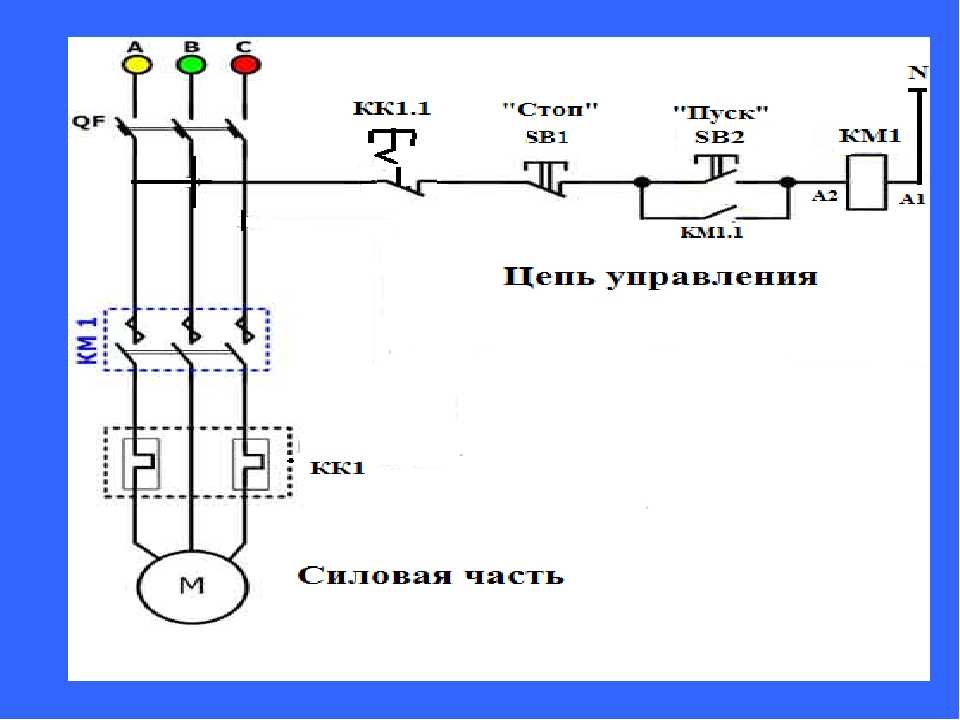 8.15 а).
8.15 а).
а) б)
Рис.8.15. Электромеханические (а) и механические (б) характеристики АД
при регулировании координат с помощью резисторов в цепи статора
Характеристики 2–4 расположены ниже естественной характеристики 1, построенной при R
1д
= 0, причем большему значению R
1д
соответствует больший наклон искусственных характеристик 2-4.
Механические характеристики АД представлены на рисунке 8.15 б.
Координаты точки экстремума М
к
и S
к
изменяются при варьировании R
1д
, а именно: в соответствии с (8.15) и (8.16) при увеличении R
1д
критический момент М
к
и критическое скольжение S
к
уменьшаются. Уменьшается и пусковой момент.
В то же время искусственные механические характеристики (рис. 8.15б) мало пригодны при регулировании скорости АД: они обеспечивают небольшой диапазон изменения скорости; жесткость характеристик АД и его перегрузочная способность, характеризуемая критическим моментом, по мере увеличения
R
1д
снижается; способ отличает и низкая экономичность. В силу этих недостатков регулирование скорости АД с помощью активных резисторов в цепи его статора применяется редко .
В силу этих недостатков регулирование скорости АД с помощью активных резисторов в цепи его статора применяется редко .
Включение добавочных резисторов R
2д
в цепь ротора
применяется как с целью регулирования тока и момента АД, так и его скорости (рис. 8.14а).
Искусственные электромеханические характеристики при R
2д
= var имеют вид, показанный на рисунке 8.15а, и могут использоваться для регулирования (ограничения) пускового тока I
кз
= I
п
.
Скорость идеального холостого хода АД ω
0
и максимальный (критический) момент двигателя М
к
в соответствии с остаются неизменными при регулировании R
2д
, а критическое скольжение S
к
, как это следует из , изменяется.
Выполненный анализ позволяет построить естественную 1 (R
2д
= 0) и искусственные 2–3 (R
2д3
> R
2д2
) характеристики (рис. 8.16) и сделать заключение, что за счет изменения R
2д
имеется возможность повышать пусковой момент АД вплоть до критического момента М
к
без снижения перегрузочной способности двигателя, что весьма важно при регулировании его скорости.
Рис. 8.16. Механические характеристики при различных сопротивлениях R
2д
добавочного резистора в цепи ротора
В остальном рассматриваемый способ характеризуется такими же показателями, что и для ДПТ НВ. Диапазон регулирования скорости небольшой – около 2–3 – из-за снижения жесткости характеристик и роста потерь по мере его увеличения. Плавность регулирования скорости, которая изменяется только вниз от основной, определяется плавностью изменения добавочного резистора R
2д
.
Затраты, связанные с созданием данной системы ЭП, невелики, так как для регулирования обычно используются простые и дешевые
резисторов. В то же время эксплуатационные затраты оказываются значительными, поскольку велики потери в ПД.
С увеличением скольжения S возрастают потери в роторной цепи, поэтому реализация большого диапазона регулирования скорости приводит к значительным потерям энергии и снижению КПД ЭП.
Регулирование скорости этим способом осуществляется при небольшом диапазоне регулирования скорости или кратковременной работе на пониженных скоростях.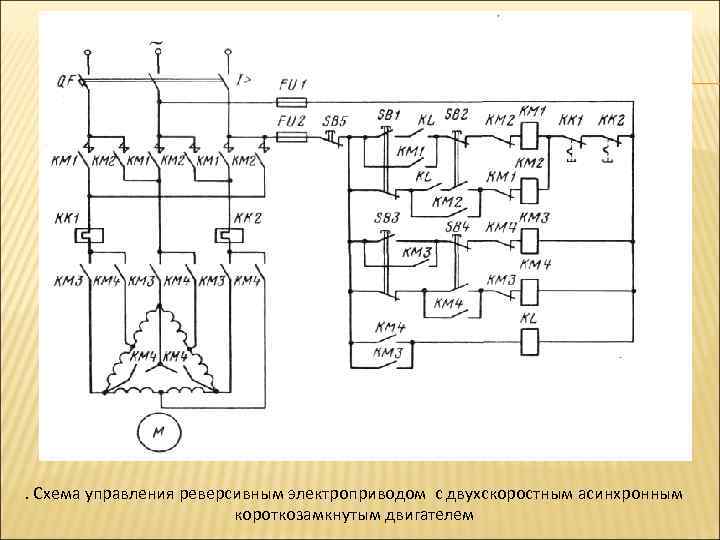 Этот способ нашел широкое применение например, в ЭП подъемно-транспортных машин и механизмов.
Этот способ нашел широкое применение например, в ЭП подъемно-транспортных машин и механизмов.
Расчет сопротивления добавочного резистора R
2д
может быть выполнен несколькими способами в зависимости от формы задания требуемой искусственной механической характеристики.
Если искусственная характеристика определена полностью, то сопротивление добавочного резистора (например, R
2д1
) можно определить по выражению :
, (8.30)
где
– сопротивление фазы ротора АД.
Если искусственная характеристика задана своей рабочей частью, то можно использовать метод отрезков, для чего на рисунке 8.16 проведена вертикальная линия, соответствующая номинальному моменту М
ном
, и отмечены характерные точки: а, b, c, d, e. Сопротивление искомого резистора R
2д1
определяется как
R
2д1
= R
2ном
аb/ас, (8.31)
где
–
номинальное сопротивление АД;
–
ЭДС ротора при S = 1;
–
номинальный ток ротора.
http://life-prog.ru/1_17774_tormoznie-rezhimi-ad. html
html
15.09.2014
Для управления асинхронными электродвигателями используются релейно-контакторные аппараты, которые реализуют типовые схемы пуска, реверса, торможения, остановки электропривода.
На базе типовых схем релейно-контакторного управления разрабатываются схемы управления электроприводами производственных механизмов. Пуск асинхронных двигателей с короткозамкнутым ротором небольшой мощности осуществляется обычно при помощи магнитных пускателей. В данном случае магнитный пускатель состоит из контактора переменного тока, двух встроенных в него электротепловых реле.
Простейшая схема управления асинхронным электродвигателем с короткозамкнутым ротором.
Схема использует питание силовых цепей и цепей управления от источника одного и того же напряжения (рис. 4.9). Для повышения надежности работы релейных контакторных аппаратов, большей частью рассчитанных на низкое напряжение, и для повышения безопасности эксплуатации применяются схемы с питанием цепей управления от источника пониженного напряжения.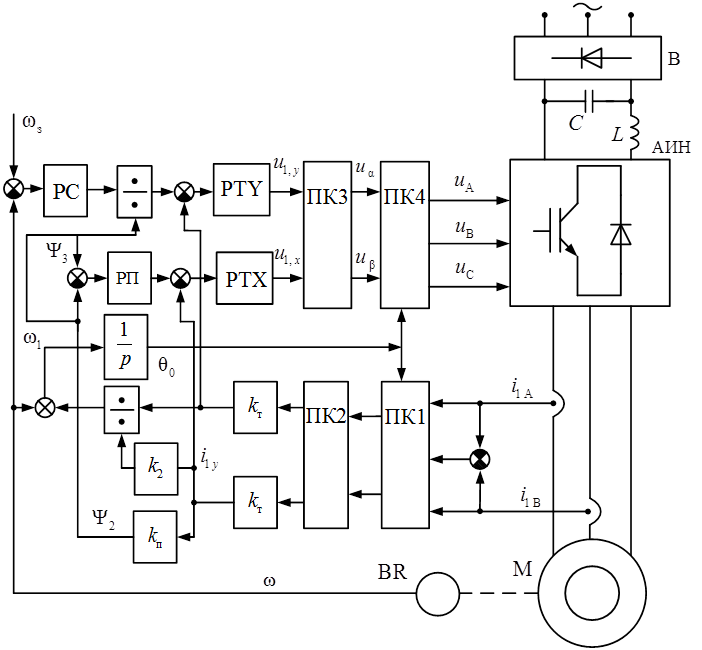
Если рубильник S1 включен, то для пуска электродвигателя необходимо нажать на кнопку S2 («пуск»). При этом катушка контактора K1M получит питание, замкнутся главные контакты К1(1-3)М в силовой цепи и статор двигателя присоединится к сети. Электродвигатель начнет вращаться. Одновременно в цепи управления закроется замыкающий вспомогательный контакт K1A, шунтирующий кнопку S2 («пуск»), после чего эту кнопку не нужно удерживать в нажатом состоянии, так как цепь катушки контактора KlM остается замкнутой. Кнопка S2 с самовозвратом и за счет действия пружины возвращается в исходное разомкнутое состояние.
Для отключения электродвигателя от сети нажимается кнопка S3 («стоп»). Катушка контактора K1M обесточивается и замыкающие контакты K1(1-3)M отключают обмотки статора от сети. Одновременно размыкается вспомогательный контакт K1A. Схема приходит в исходное, нормальное состояние. Вращение электродвигателя прекращается.
Схема предусматривает защиту двигателя и цепи управления от коротких замыканий плавкими предохранителями F 1(1-3), защиту от перегрузки двигателя двумя электротепловыми реле F2(1-2). Пружинный привод контактов магнитного пускателя К 1(1-3)М, K1A на размыкание реализует так называемую нулевую защиту, которая при исчезновении или значительном снижении напряжения отключают двигатель от сети. После восстановления нормального напряжения самопроизвольного пуска двигателя не произойдет.
Пружинный привод контактов магнитного пускателя К 1(1-3)М, K1A на размыкание реализует так называемую нулевую защиту, которая при исчезновении или значительном снижении напряжения отключают двигатель от сети. После восстановления нормального напряжения самопроизвольного пуска двигателя не произойдет.
Более четкая защита от снижения или исчезновения напряжения может быть выполнена при помощи реле пониженного напряжения, катушка которого присоединяется к двум фазам силовой цепи, а его замыкающий контакт включен последовательно с катушкой контактора. В этих схемах вместо установки на вводе рубильников с предохранителями применяют воздушные автоматы.
Схема управления асинхронным электродвигателем с коротко-замкнутым ротором с использованием магнитного пускателя и воздушного автоматического выключателя.
Автоматический выключатель F1 исключает возможность обрыва одной фазы от срабатывания защиты при однофазном коротком замыкании, как это бывает при установке предохранителей (рис. 4. 10). Нет необходимости заменять элементы в предохранителях при сгорании их плавкой вставки.
10). Нет необходимости заменять элементы в предохранителях при сгорании их плавкой вставки.
В схемах управления электродвигателями применяются автоматы с электромагнитными расцепителями либо с расцепителями электромагнитным и электротепловым. Расцепители электромагнитного типа характеризуются нерегулярной отсечкой, равной десятикратному току, и служат для защиты от токов короткого замыкания, Электротепловые расцепители обладают обратнозависимой характеристикой времени от тока. Так, расцепитель с номинальным током 50 А срабатывает при 1,5-кратной нагрузке через 1 ч, а при 4-кратной — через 20 с. Электротепловые расцепители не защищают двигатель от перегрева при перегрузках на 20 — 30%, но могут защитить двигатель и силовую цепь от перегрева пусковым током при застопоривании приводного механизма. Поэтому для защиты электродвигателей от длительных перегрузок при использовании автомата с электротепловым расцепителем такого типа применяются дополнительные электротепловые реле, как и при использовании автоматического выключателя с электромагнитным расцепителем.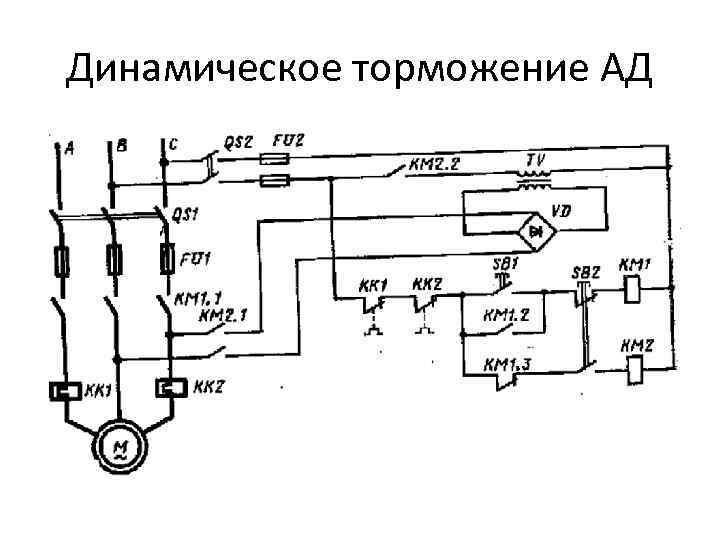 Многие выключатели, например АП-50, защищают электродвигатель одновременно от токов короткого замыкания и от перегрузок. Принципы действия схем (см. рис. 4.9, 4.10) для пуска и останова аналогичны. Эти схемы нашли широкое применение для управления нереверсивными электроприводами транспортеров, воздуходувок, вентиляторов, насосов, лесоперерабатывающих и заточных станков.
Многие выключатели, например АП-50, защищают электродвигатель одновременно от токов короткого замыкания и от перегрузок. Принципы действия схем (см. рис. 4.9, 4.10) для пуска и останова аналогичны. Эти схемы нашли широкое применение для управления нереверсивными электроприводами транспортеров, воздуходувок, вентиляторов, насосов, лесоперерабатывающих и заточных станков.
Схемы управления асинхронным двигателем с короткозамкнутым ротором с реверсивным магнитным пускателем.
Эта схема применяется в случаях, когда необходимо изменять направления вращения электропривода (рис. 4.11), например в приводе электролебедок, рольгангов, механизмов подачи станков и т.д. Управление двигателями осуществляется реверсивным магнитным пускателем. Включение двигателя для вращения «вперед» осуществляется нажатием кнопки S1. Катушка контактора K1M будет под напряжением, и замыкающие главные контакты К1(1-3)M присоединят электродвигатель к сети. Для переключения электродвигателя необходимо нажать на кнопку S3 («стоп»), а затем на кнопку S2 («назад»), что вызовет отключение контактора K1M и включение контактора К2М. При этом, как видно из схемы, две фазы на статоре переключатся, т.е. произойдет реверс вращения электродвигателя. Во избежание короткого замыкания в цепи статора между первой и третьей фазой вследствие ошибочного одновременного нажатия на обе пусковые кнопки S1 и S2 реверсивные магнитные пускатели имеют рычажную механическую блокировку (на схеме не показана), которая препятствует втягиванию одного контактора, если включен другой. Для повышения надежности кроме механической блокировки в схеме предусмотрена электрическая блокировка, которая осуществляется при помощи размыкающих вспомогательных контактов К1А.2 и К2А.2. Обычно реверсивный магнитный пускатель состоит из двух контакторов, заключенных в один корпус.
При этом, как видно из схемы, две фазы на статоре переключатся, т.е. произойдет реверс вращения электродвигателя. Во избежание короткого замыкания в цепи статора между первой и третьей фазой вследствие ошибочного одновременного нажатия на обе пусковые кнопки S1 и S2 реверсивные магнитные пускатели имеют рычажную механическую блокировку (на схеме не показана), которая препятствует втягиванию одного контактора, если включен другой. Для повышения надежности кроме механической блокировки в схеме предусмотрена электрическая блокировка, которая осуществляется при помощи размыкающих вспомогательных контактов К1А.2 и К2А.2. Обычно реверсивный магнитный пускатель состоит из двух контакторов, заключенных в один корпус.
В практике применяется также схема реверса асинхронных короткозамкнутых электродвигателей с использованием двух отдельных нереверсивных магнитных пускателей. Ho для устранения возможности короткого замыкания между первой и третьей фазой силовой цепи от одновременного включения обоих пускателей применяют двухцепные кнопки. Например, при нажатии кнопки S1 («вперед») цепь катушки контакторов K1M замыкается, а цепь катушки К2М при этом дополнительно размыкается. (Принцип действия двухцепных кнопок показан на рис. 4.12.) Реверс электродвигателей постоянного тока осуществляется изменением полярности напряжения силовой цепи.
Например, при нажатии кнопки S1 («вперед») цепь катушки контакторов K1M замыкается, а цепь катушки К2М при этом дополнительно размыкается. (Принцип действия двухцепных кнопок показан на рис. 4.12.) Реверс электродвигателей постоянного тока осуществляется изменением полярности напряжения силовой цепи.
Схема управления двухскоростным асинхронным электродвигателем с короткозамкнутым ротором.
Такая схема приведена на рис. 4.12. Привод может иметь две скорости. Пониженная скорость получается при соединении обмоток статора на треугольник, что осуществляется нажатием двухцепной кнопки S3 и включением контактора КЗ с замыканием трех силовых контактов К3. Одновременно замыкается вспомогательный контакт К3А, шунтирующий кнопку S3, и размыкается К3А — вспомогательный контакт в цепи катушки К4.
Повышенная скорость получается при соединении обмоток на двойную звезду, что реализуется нажатием двухцепной кнопки S4. При этом катушка контактора К3 обесточивается, контакты КЗ в силовой цепи размыкаются, размыкается вспомогательный контакт К3А, шунтирующий кнопку S3, и замыкается вспомогательный контакт К3А в цепи катушки К4.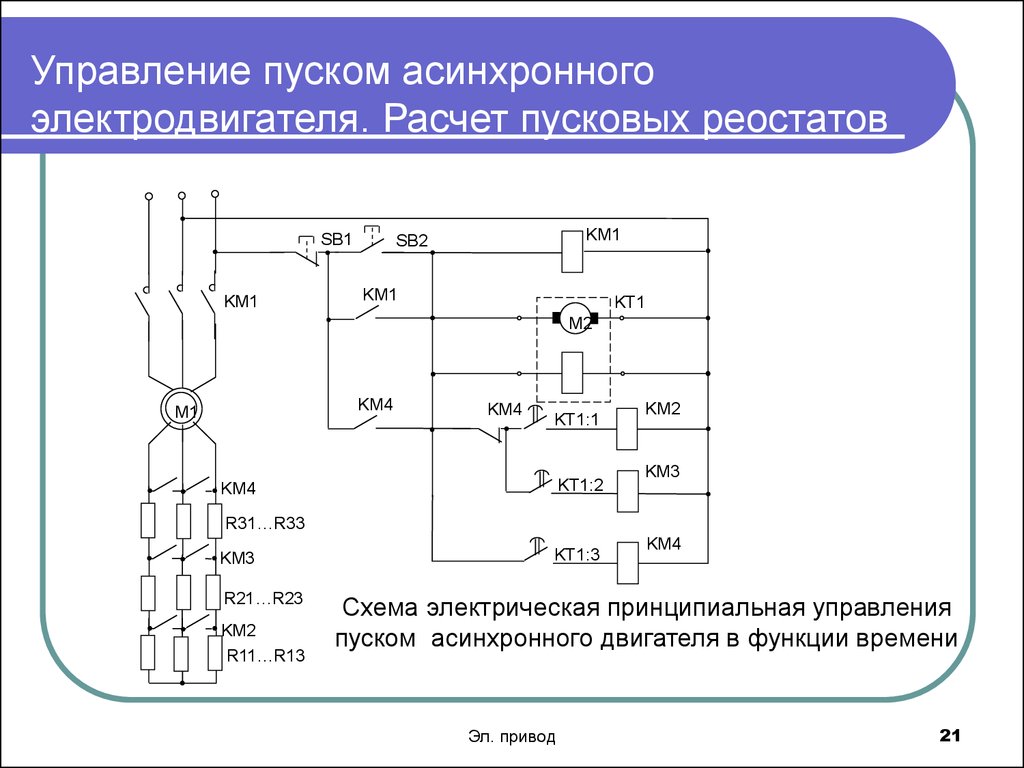
При дальнейшем нажатии (перемещении) кнопки S4 замыкается цепь катушки контактора К4, замыкаются пять контактов К4 в силовой цепи, обмотка статора будет подключена на двойную звезду. Одновременно замыкается вспомогательный контакт К4А, шунтирующий кнопку S4 и размыкается вспомогательный контакт К4А в цепи катушки контактора К3. Обычно контакторы переменного тока имеют три силовых контакта, в схеме подключения статора на двойную звезду показано пять силовых контактов К4. В этом случае параллельно катушке контактора К4 включается катушка дополнительного контактора.
После предварительного соединения обмоток статора производится пуск двигателя при помощи контакторов K1 и К2 для вращения вперед или назад. Включение контакторов K1 или К2 осуществляется соответственно нажатием кнопки S1 или S2. Применение двухцепных кнопок позволяет осуществить дополнительную электрическую блокировку, исключающую одновременное включение контакторов K1 и К2, а также К3 и К4.
В схеме предусмотрена возможность переключения с одной скорости на другую при вращении электродвигателя вперед или назад без нажатия кнопки S5 («стоп»). При нажатии кнопки S5 катушки включенных контакторов обесточиваются и схема приходит в исходное, нормальное состояние.
При нажатии кнопки S5 катушки включенных контакторов обесточиваются и схема приходит в исходное, нормальное состояние.
Рассмотренная схема является основой построения схем управления электродвигателями двухскоростных транспортеров подачи раскряжевочных агрегатов, сортировочных конвейеров и т.п.
Рассмотрим вопросы торможения электродвигателей. При отключении обмоток статора от сети ротор электродвигателя с рабочим механизмом, например дисковой пилой шпалорезного станка, продолжает сравнительно долгое время вращаться по инерции. Для устранения этого явления в приводах с асинхронными электродвигателями в зависимости от их мощности и назначения применяется торможение противовключением, фрикционное торможение и динамическое торможение.
Схема управления асинхронным электродвигателем с коротко-замкнутым ротором с использованием торможения противовключением.
Такая схема изображена на рис. 4.13. В схемах торможения противовключением используется реле контроля скорости (PKC) ЕМ, механически связанное с валом двигателя; его замыкающий контакт EA при определенной угловой скорости двигателя закрывается. При неподвижном роторе двигателя и скорости его вращения менее 10…15% от номинальной контакт реле EA разомкнут. Нажатием кнопки SI включается контактор K1M, замыкаются силовые контакты К1(1-3)M и двигатель пускается в ход, замыкается вспомогательный контакт K1A.1, шунтирующий кнопку S1. Размыкающий вспомогательный контакт А7А.2 одновременно разрывает цепь питания катушки контактора К2М, а несколько позднее с увеличением скорости вращения двигателя замыкается контакт реле скорости EA. Поэтому контактор К2М в этот период не включается.
При неподвижном роторе двигателя и скорости его вращения менее 10…15% от номинальной контакт реле EA разомкнут. Нажатием кнопки SI включается контактор K1M, замыкаются силовые контакты К1(1-3)M и двигатель пускается в ход, замыкается вспомогательный контакт K1A.1, шунтирующий кнопку S1. Размыкающий вспомогательный контакт А7А.2 одновременно разрывает цепь питания катушки контактора К2М, а несколько позднее с увеличением скорости вращения двигателя замыкается контакт реле скорости EA. Поэтому контактор К2М в этот период не включается.
Отключение электродвигателя от сети с торможением противовключением производится нажатием кнопки S2 («стоп»). При этом катушка контактора K1M обесточивается, размыкаются силовые контакты К1(1-3)М, размыкается шунтирующий пусковую кнопку S1 вспомогательный контакт K1A.1. Одновременно замыкается размыкающий вспомогательный контакт К1А.2. При этом двигатель вращается по инерции и контакт реле EA замкнут, следовательно, катушка контактора К2А получит питание, замкнутся главные контакты К2(1-3)М, разомкнется вспомогательный контакт К2А в цепи катушки K1M.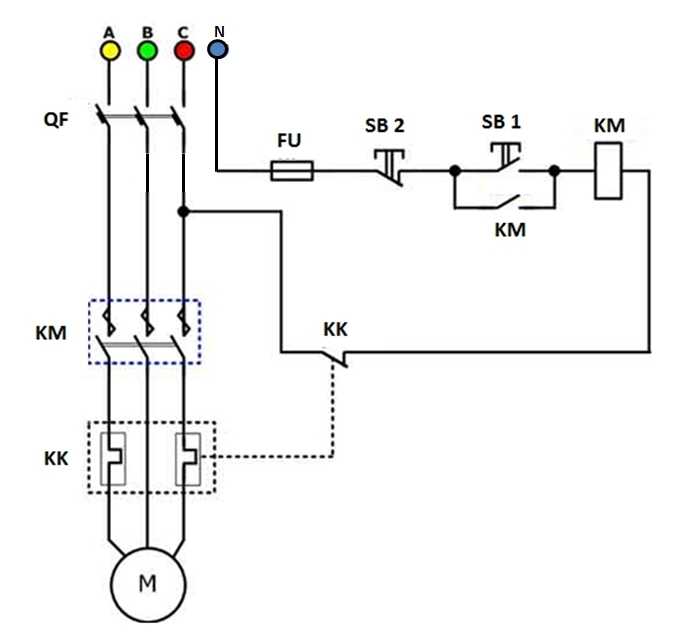 Обмотки статора будут подключены к сети на реверс вращения ротора. Ротор мгновенно затормаживается и при скорости вращения, близкой к нулю, контакт реле скорости EA размыкается, катушка контактора К2М обесточивается, главные контакты К2(1-3)М размыкаются, замыкается вспомогательный контакт К2А. Двигатель остановлен и отключен от сети. Схема будет в исходном положении.
Обмотки статора будут подключены к сети на реверс вращения ротора. Ротор мгновенно затормаживается и при скорости вращения, близкой к нулю, контакт реле скорости EA размыкается, катушка контактора К2М обесточивается, главные контакты К2(1-3)М размыкаются, замыкается вспомогательный контакт К2А. Двигатель остановлен и отключен от сети. Схема будет в исходном положении.
Рассмотренная типовая схема торможения противовключением является основой построения схем управления электродвигателями станков заточки цепных, круглых, рамных пил, схем обрезных станков и др. Торможение противовключением обеспечивает жесткий, мгновенный останов привода и применяется обычно для электродвигателей небольшой мощности.
Схема фрикционного торможения асинхронного электродвигателя грузоподъемного механизма.
Такая схема представлена на рис. 4.14. В соответствии с правилами технической эксплуатации грузоподъемных механизмов в отключенном состоянии привод и механизм подъема должны быть надежно заторможены.
На упрощенной схеме условно показан односторонний колодочный тормоз Tс пружинным приводом зажима тормозного шкива.
При пуске электродвигателя нажимается кнопка S1 («пуск»), катушка контактора K1M будет под напряжением, замкнутся три контакта К1(1-3)М в силовой цепи и вспомогательный контакт K1A. Статор электродвигателя и обмотка электромагнита Y одновременно будут присоединены к сети. Электромагнит Y одновременно отведет колодочный тормоз от шкива и создаст деформацию пружины. Двигатель вращается расторможенным.
Нажатием кнопки S2 («стоп») обесточивается катушка контактора K1M, размыкаются главные контакты в силовой цепи К1(1-3)М и вспомогательный контакт K1A. Статор электродвигателя и обмотка электромагнита У отключаются от сети, колодочный тормоз с пружинным приводом жестко фиксирует ротор электродвигателя с механизмом подъема. Применение реверсивного магнитного пускателя дает возможность получить схему фрикционного торможения электропривода механизма и на подъем, и на опускание груза.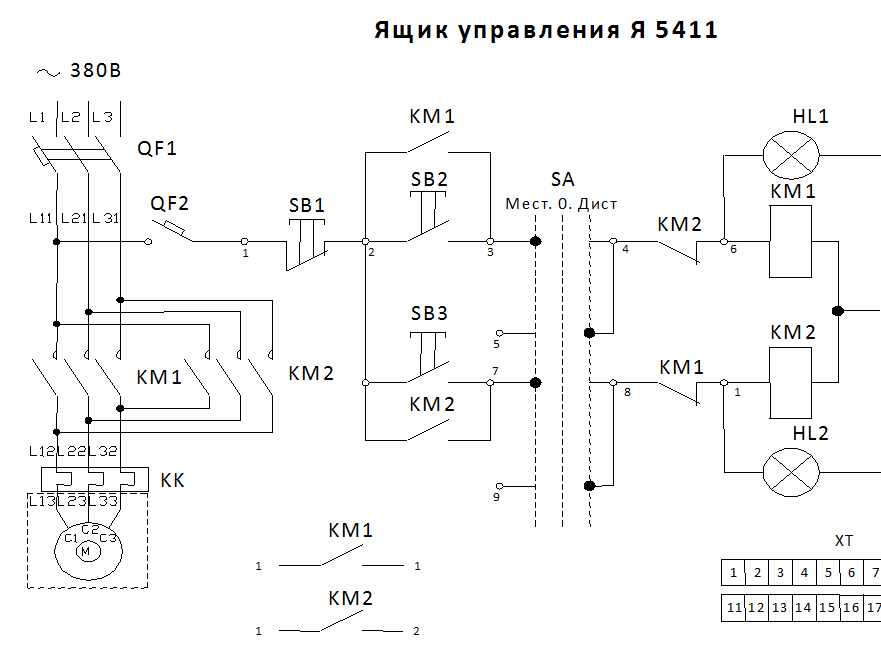
Схема фрикционного торможения асинхронного электродвигателя станочного оборудования.
Такая схема показана на рис. 4.15. В нормальном (отключенном) состоянии ротор электродвигателя расторможен под действием пружинного привода. Это позволяет проводить смену инструмента, наладку станка с легким поворотом приводного вала и ротора электродвигателя.
Электродвигатель подключается к сети при помощи кнопки S1, контакта K1A и силовых контактов К1(1-3)М. Остановка электропривода станка производится нажатием двухцепной кнопки S2 («стоп»). При этом катушка контактора K1M обесточивается, размыкаются главные контакты в силовой цепи К1(1-3)М и вспомогательный контакт K1A. Электродвигатель отключается от сети, продолжая вращаться по инерции.
При дальнейшем нажатии на кнопку S2 замыкается цепь катушки контактора К2М, замыкаются контакты К2(1-2)М, электромагнит Y затягивает колодочный тормоз. Кнопка S2 освобождается и принимает исходное положение, контактор К2М обесточивается, контакты К2(1-2)М размыкаются. Статор двигателя и электромагнит отключены от сети, привод остановлен и расторможен. Эта простейшая схема является базой разработки схем фрикционного торможения электродвигателей станочного оборудования, в которых учитывается необходимость реверса, защитных ограждений, сигнализации.
Статор двигателя и электромагнит отключены от сети, привод остановлен и расторможен. Эта простейшая схема является базой разработки схем фрикционного торможения электродвигателей станочного оборудования, в которых учитывается необходимость реверса, защитных ограждений, сигнализации.
Схема управления асинхронным двигателем с использованием динамического торможения.
Такая схема приведена на рис. 4.16. Динамическое торможение, в отличие от торможения противовключением и фрикционного метода, является плавным, мягким торможением. Включение электродвигателя в сеть осуществляется при нажатии кнопки SI («пуск»). Контактор K1M будет включен, замкнутся три главных контакта К1(1-3)М в силовой цепи, замкнется вспомогательный контакт K1А.1, разомкнется контакт К1А.2, замкнется контакт К1А.З, после чего включится реле времени Д1М и замкнет свой контакт РДТ в цепи катушки контактора К2М, которую несколько раньше разомкнул контакт К1А.2.
Отключение статора электродвигателя от сети переменного тока и торможение осуществляется нажатием кнопки S2 («стоп»). Контактор К1М теряет питание, главные контакты К1(1-3)М размыкаются, размыкаются вспомогательные контакты K1A.1, К1А.3, и замыкается контакт К1А.2. Катушка реле времени Д1M теряет питание, однако замыкающий контакт РДТ, будучи ранее замкнутым, разомкнется с выдержкой времени, которая несколько превышает длительность торможения двигателя. При замыкании контакта К1А.2 катушка контактора К2М получит питание, разомкнется вспомогательный контакт блокировки К2А и замкнутся контакты К2(1-2)М. В обмотку статора подается постоянный ток. Обмотка создает неподвижный в пространстве магнитный поток. Во вращающемся по инерции роторе индуцируются ЭДС.
Контактор К1М теряет питание, главные контакты К1(1-3)М размыкаются, размыкаются вспомогательные контакты K1A.1, К1А.3, и замыкается контакт К1А.2. Катушка реле времени Д1M теряет питание, однако замыкающий контакт РДТ, будучи ранее замкнутым, разомкнется с выдержкой времени, которая несколько превышает длительность торможения двигателя. При замыкании контакта К1А.2 катушка контактора К2М получит питание, разомкнется вспомогательный контакт блокировки К2А и замкнутся контакты К2(1-2)М. В обмотку статора подается постоянный ток. Обмотка создает неподвижный в пространстве магнитный поток. Во вращающемся по инерции роторе индуцируются ЭДС.
Взаимодействие токов ротора, вызванных этими ЭДС, с неподвижным магнитным потоком создает тормозной момент двигателя
где Mн — номинальный момент двигателя; nс — синхронная скорость двигателя; I»р — приведенный к статору ток ротора; R»р — полное активное сопротивление ротора, приведенное к статору; nд — относительная скорость двигателя, nд = n/nс.
После размыкания контакта реле времени РДТ схема приходит в исходное состояние, двигатель плавно останавливается. Для ограничения постоянного тока служит дополнительный резистор Rт. На базе этой схемы созданы схемы управления электродвигателями лесопильных рам, шпалорезных и других крупных круглопильных станков.
Схема тиристорного управления пуском и торможением асинхронного двигателя с короткозамкнутым ротором.
Такая схема изображена на рис. 4.17. В типовой схеме разомкнутого управления асинхронным двигателем с короткозамкнутым ротором в качестве силовых элементов, включенных в статорную цепь двигателя, используются тиристоры в сочетании с релейно-контактными аппаратами в цепи управления. Тиристоры выполняют роль силовых коммутаторов и, кроме того, легко позволяют осуществлять необходимый темп изменения напряжения на статоре двигателя регулированием угла включения тиристоров.
При пуске плавное изменение угла включения тиристоров дает возможность изменять приложенное к статору напряжение от нуля до номинального, тем самым ограничивать токи и момент двигателя.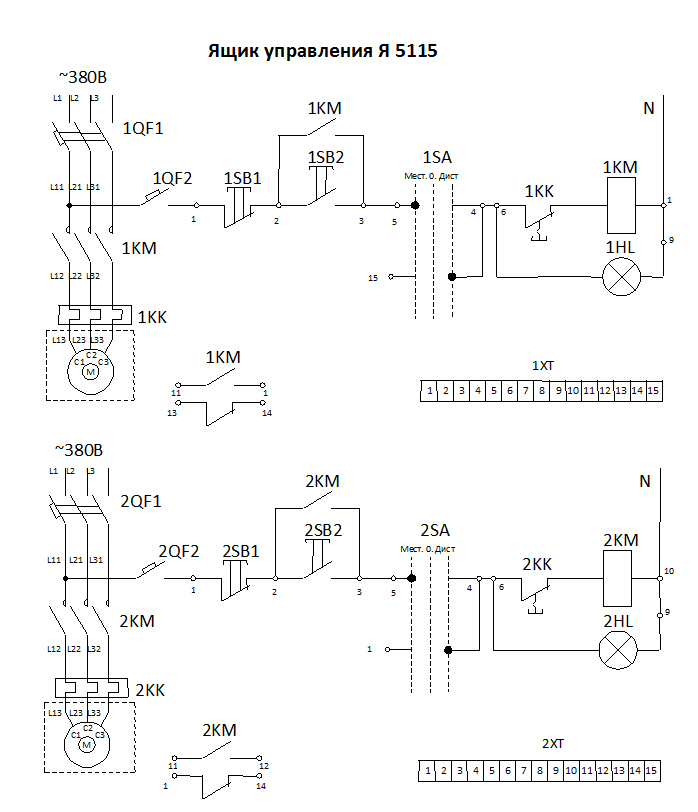 Схема содержит устройство динамического торможения в виде демпфирующего контура. Применение шунтирующего тиристора, замыкающего цепь тока между двумя фазами, приводит к увеличению постоянной составляющей тока, что создает достаточный тормозной момент в области высокой угловой скорости.
Схема содержит устройство динамического торможения в виде демпфирующего контура. Применение шунтирующего тиристора, замыкающего цепь тока между двумя фазами, приводит к увеличению постоянной составляющей тока, что создает достаточный тормозной момент в области высокой угловой скорости.
Рассмотрим типовую схему комплектного устройства, состоящего в силовой части из группы включенных встречно-параллельно тиристоров VS1…VS4 в фазах А и С и одного короткозамкнутого тиристора между фазами А и В — V5 для управления асинхронным двигателем М. Схема включает блок управления тиристорами БУ и релейно-контактный узел управления.
Нажатием кнопки S1 включается реле K1M и К2М, на управляющие электроды тиристоров VS1…VS4 подаются импульсы, сдвинутые на 60° относительно питающего напряжения. К обмоткам статора двигателя подается пониженное напряжение, уменьшаются пусковой ток и пусковой момент. Ротор двигателя увеличивает скорость вращения, разгоняется. Размыкающий контакт реле К1.2 отключает реле К3M с задержкой времени, зависящей от параметров резистора R7 и конденсатора С4. Размыкающими контактами реле К3М шунтируются соответствующие резисторы в блоке управления тиристорами БУ, и к статору прикладывается полное напряжение сети.
Размыкающими контактами реле К3М шунтируются соответствующие резисторы в блоке управления тиристорами БУ, и к статору прикладывается полное напряжение сети.
Для остановки двигателя нажимается кнопка S3, обесточивается релейная схема управления, тиристоры VS1…VS4 и напряжение со статора двигателя снимается. При этом за счет энергии, запасенной конденсатором С5, включается на время торможения реле К4М, которое своими контактами К4.2 и К4.3 включает тиристоры VS2 и VS5. По фазам А и В в обмотки статора двигателя протекает ток однополупериодного выпрямления, что обеспечивает эффективное динамическое торможение.
Сила тока, а следовательно, и время динамического торможения регулируются резисторами R1 и R3. Эта схема также имеет шаговый режим. При нажатии кнопки S2 включается реле K5M, которое своими контактами KS.3 и К5.4 включает тиристоры VS2 и VS5. В этом случае по фазам А и В в обмотки статора двигателя протекает ток однополупериодного выпрямления. При отпускании кнопки S2 выключается реле K5M и тиристоры VS2 и VS5; при этом на короткое время за счет энергии, запасенной в конденсаторе Сб, включается реле, которое своим контактом К6. 2 включает тиристор VS3, и ротор двигателя поворачивается на некоторый угол вследствие поворота примерно на такой же угол результирующего вектора потока статора.
2 включает тиристор VS3, и ротор двигателя поворачивается на некоторый угол вследствие поворота примерно на такой же угол результирующего вектора потока статора.
Шаг поворота зависит от напряжения сети, момента статической нагрузки, момента инерции привода и среднего значения выпрямленного тока. Реализация пошагового режима работы двигателя проводится после его остановки, так как реле К5М первоначально можно включить только после замыкания размыкающих контактов K1.5, К4.1. Шаговый режим работы двигателя создает благоприятные условия наладки.
Схема управления асинхронными электродвигателями с фазным ротором в функции времени.
Такая схема представлена на рис. 4.18. Защита силовых цепей двигателя от токов короткого замыкания осуществляется с помощью реле максимального тока FI, F2, F3; защита от перегрузок — электротепловыми реле F4(1-2), нагревательные элементы которых включены через трансформаторы тока TT1, ТТ2. Цепи управления защищаются автоматическим выключателем F5, имеющим максимальную токовую защиту.
При включении рубильника SI и автоматического выключателя FS получит питание реле времени Д1М и замыкающие контакты его Д1А.1, Д1А.2 закроются, тем самым подготовится цепь включения реле времени Д2М и контактора K1M. Размыкающий контакт Д1А.3 разомкнется и выключит цепь катушек контакторов ускорения К2М, R3М, К4М.
При последующем нажатии кнопки S2 («пуск») через замкнувшийся ранее контакт Д1А.2 включится контактор K1M, замкнутся главные контакты К1(1-3) M в силовой цепи, в обмотку статора двигателя M будет подано напряжение. В обмотку ротора при этом включены все пусковые резисторы. Начинается пуск двигателя на первой реостатной характеристике. Одновременно закроется вспомогательный контакт K1A.3, шунтирующий пусковую кнопку, и замкнется контакт K1A.2, через который подается питание в цепь катушек реле времени Д2М, Д3М. Размыкающий вспомогательный контакт K1A.1 отключит цепь реле Д1М, которое отпускает якорь с выдержкой времени при отключении его катушки. Поэтому Д2М не сразу включится и его размыкающий контакт Д2А.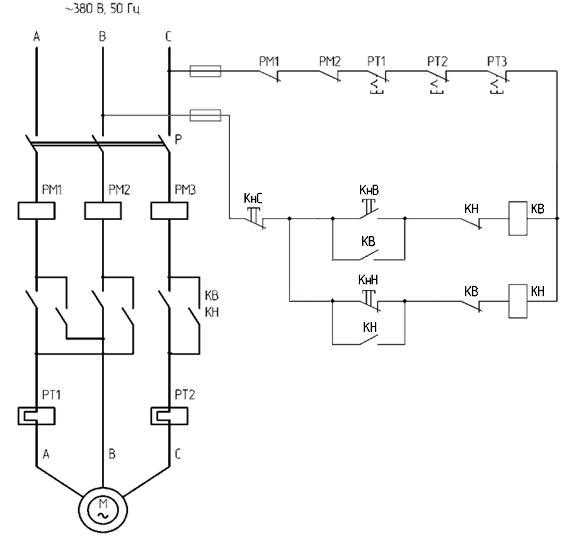 1 будет открыт.
1 будет открыт.
Следует отметить, что размыкающий контакт Д1А.З остается еще открытым; по истечении времени выдержки реле Д1М его замыкающий контакт Д1А.1 (а также Д1А.2) откроется, а размыкающий Д1А.З — закроется. В результате этих переключений в схеме управления включится контактор К2М и будет шунтирована первая пусковая ступень резистора — двигатель с первой реостатной характеристики перейдет на вторую, разогнавшись до большей угловой скорости. Кроме того, выключится реле времени Д2М и его размыкающий контакт с выдержкой времени Д2А.1 замкнет цепь катушки контактора К3М, который сработает и замкнет свои контакты К3(1-2)М, т.е. шунтируется вторая пусковая ступень резистора — двигатель переходит на третью реостатную характеристику.
Наконец, после размыкания с выдержкой времени замыкающего контакта Д2А.1 выключится реле Д3М — с выдержкой времени, на которое настроено реле Д3М (соответственно времени пуска двигателя на последней реостатной характеристике), замкнется его контакт Д3А.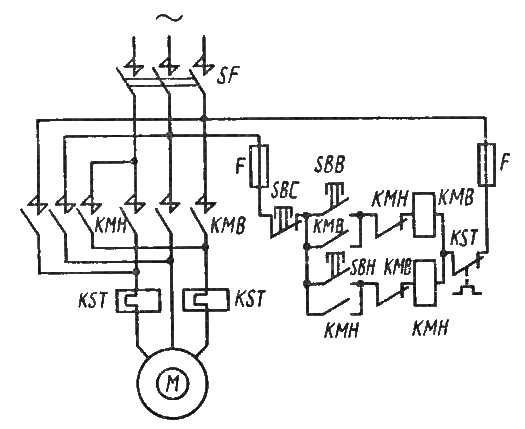 1, включится контактор К4М и замкнет свои контакты К4(1-3)М. Обмотка ротора будет замкнута накоротко и двигатель будет заканчивать свой разгон в соответствии с его естественной характеристикой. Этим и заканчивается ступенчатый пуск асинхронного двигателя, контролируемый в функции времени электромагнитными реле времени Д1М, Д2М, Д3М.
1, включится контактор К4М и замкнет свои контакты К4(1-3)М. Обмотка ротора будет замкнута накоротко и двигатель будет заканчивать свой разгон в соответствии с его естественной характеристикой. Этим и заканчивается ступенчатый пуск асинхронного двигателя, контролируемый в функции времени электромагнитными реле времени Д1М, Д2М, Д3М.
Останов двигателя производится нажатием кнопки S3. Схема используется для привода механизмов, не требующих реверса, длительность торможения которых после отключения двигателя не имеет существенного значения. В частности, на базе этой схемы создаются схемы управления главным электродвигателем лесопильных рам.
Для управления силовым электрооборудованием в электрических цепях используют разнообразные устройства дистанционного управления, защиты, телемеханики и автоматики, воздействующие на коммутационные аппараты его включения и отключения или регулирования.
На рис.5.4 приведена принципиальная схема управления асинхронным электродвигателем с короткозамкнутым ротором. Данная схема широко используется на практике при управлении приводами насосов, вентиляторов и многих других.
Данная схема широко используется на практике при управлении приводами насосов, вентиляторов и многих других.
Перед началом работы включают автоматический выключатель QF. При нажатии кнопки SВ2 включается пускатель КМ и запускается двигатель М. Для остановки двигателя необходимо нажать кнопку SВ1, при этом отключаются пускатель КМ и двигатель М.
Рис.5.4. Схема включения асинхронного электродвигателя с короткозамкнутым ротором
При перегрузке электродвигателя М срабатывает электротепловое реле КК, размыкающее контакты КК:1 в цепи катушки КМ. Пускатель КМ отключается, двигатель М останавливается.
В общем случае схемы управления могут осуществлять торможение электропривода, его реверсирование, изменять частоту вращения и т.д. В каждом конкретном случае используется своя схема управления.
В системах управления электроприводами широко используются блокировочные связи. Блокировкой обеспечивают фиксацию определенного состояния или положения рабочих органов устройства или элементов схемы. Блокировка обеспечивает надежность работы привода, безопасность обслуживания, необходимую последовательность включения или отключения отдельных механизмов, а также ограничение перемещения механизмов или исполнительных органов в пределах рабочей зоны.
Блокировка обеспечивает надежность работы привода, безопасность обслуживания, необходимую последовательность включения или отключения отдельных механизмов, а также ограничение перемещения механизмов или исполнительных органов в пределах рабочей зоны.
Различают механическую и электрическую блокировки.
Примером простейшей электрической блокировки, применяемой практически во всех схемах управления, является блокировка кнопки «Пуск» SB2 (рис. 5.4.) контактом КМ2. Блокировка этим контактом позволяет после включения двигателя кнопку SB2 отпустить, не прерывая цепи питания катушки магнитного пускателя КМ, которое идет через блокировочный контакт КМ2.
В схемах реверсирования электродвигателей (при обеспечении движения механизмов вперед-назад, вверх-вниз и т.д.), а также при торможении применяются реверсивные магнитные пускатели. Реверсивный магнитный пускатель состоит из двух нереверсивных. При работе реверсивного пускателя необходимо исключить возможность их одновременно включения.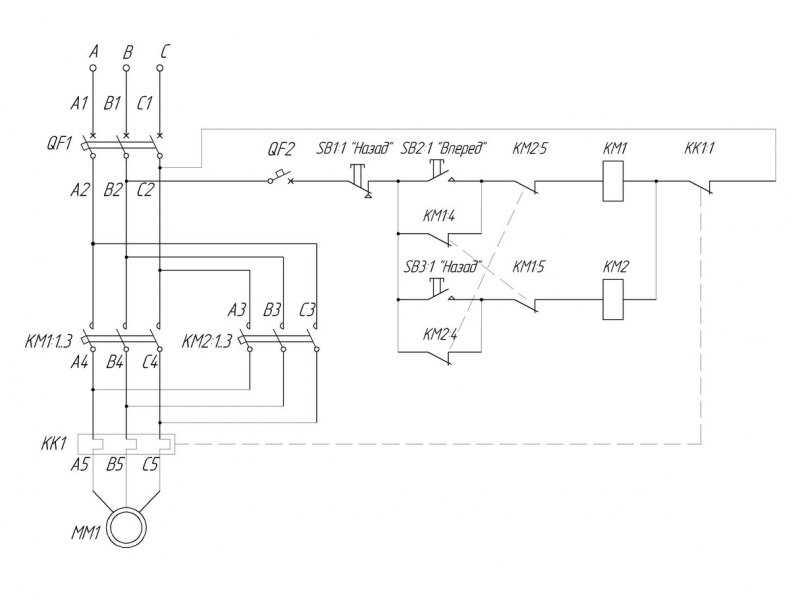 Для этого в схемах предусматриваются и электрическая, и механическая блокировки (рис. 5.5). Если реверсирование двигателя выполняется двумя нереверсивными магнитными пускателями, то роль электрической блокировки играют контакты КМ1:3 и КМ2:3, а механическая блокировка обеспечивается кнопками SВ2 и SВ3, каждая из которых состоит из двух контактов, связанных между собой механически. При этом один из контактов-замыкающий, другой — размыкающий (механическая блокировка).
Для этого в схемах предусматриваются и электрическая, и механическая блокировки (рис. 5.5). Если реверсирование двигателя выполняется двумя нереверсивными магнитными пускателями, то роль электрической блокировки играют контакты КМ1:3 и КМ2:3, а механическая блокировка обеспечивается кнопками SВ2 и SВ3, каждая из которых состоит из двух контактов, связанных между собой механически. При этом один из контактов-замыкающий, другой — размыкающий (механическая блокировка).
Схема работает следующим образом. Предположим что при включении пускателя КМ1 двигатель М вращается по часовой стрелке и против часовой — при включении КМ2. При нажатии кнопки SВ3 сначала размыкающий контакт кнопки разорвет цепь питания пускателя КМ2 и только потом замыкающий контакт SВ3 замкнет цепь катушки КМ1.
Рис.5.5. Механическая и электрическая блокировки при реверсировании привода
Пускатель КМ1 включается, запускается с вращением по часовой стрелке двигатель М. Контакт КМ1:3 размыкается, осуществляя электрическую блокировку, т. е. пока включен КМ1, цепь питания пускателя КМ2 разомкнута и его нельзя включить. Для осуществления реверса двигателя необходимо его остановить кнопкой SВ1, а затем, нажав кнопку SВ2, запустить в обратную сторону. При нажатии SВ2 сначала размыкающим контактом SВ2 разрывается цепь питания катушки КМ1 и далее замыкается цепь питания катушки КМ2 (механическая блокировка). Пускатель КМ2 включается и реверсирует двигатель М. Контакт КМ2:3, размыкаясь, осуществляет электрическую блокировку пускателя КМ1.
е. пока включен КМ1, цепь питания пускателя КМ2 разомкнута и его нельзя включить. Для осуществления реверса двигателя необходимо его остановить кнопкой SВ1, а затем, нажав кнопку SВ2, запустить в обратную сторону. При нажатии SВ2 сначала размыкающим контактом SВ2 разрывается цепь питания катушки КМ1 и далее замыкается цепь питания катушки КМ2 (механическая блокировка). Пускатель КМ2 включается и реверсирует двигатель М. Контакт КМ2:3, размыкаясь, осуществляет электрическую блокировку пускателя КМ1.
Чаще реверсирование двигателя выполняется одним реверсивным магнитным пускателем. Такой пускатель состоит из двух простых пускателей, подвижные части которых между собой связаны механически с помощью устройства в виде коромысла. Такое устройство называется механической блокировкой, не позволяющей силовым контактом одного пускателя КМ1 одновременно замыкаться силовым контактам другого пускателя КМ2 (рис. 5.6).
Рис. 5.6. Механическая блокировка «коромыслом» подвижных частей двух пускателей единого реверсивного магнитного пускателя
Электрическая схема управления реверсом двигателя при помощи двух простейших пускателей единого реверсивного магнитного пускателя такая же, как и электрическая схема управления реверсом двигателя с использованием двух нереверсивных магнитных пускателей (рис. 5.5), с применением в электрической схеме таких же электрических и механических блокировок.
5.5), с применением в электрической схеме таких же электрических и механических блокировок.
При автоматизации электроприводов поточных линий, конвейеров и т.п. применяется электрическая блокировка, которая обеспечивает пуск электродвигателей линии в определенной последовательности (рис. 5.7). При такой схеме, например, включение второго двигателя М2 (рис. 5.7) возможно только после включения первого двигателя М1, включение двигателя М3 – после включения М2. Такая очередность пуска обеспечивается блокировочными контактами КМ1:3 и КМ2:3.
Рис.5.7. Схема последовательного включения двигателей
Пример 5.1.
Используя электрическую схему (рис. 5.4) управления асинхронным электродвигателем с короткозамкнутым ротором, необходимо включить в эту схему дополнительные контакты, обеспечивающие автоматическую остановку электродвигателя рабочего механизма в одной и в двух заданных точках.
Решение. Требование задачи обеспечить остановку электродвигателя в одной заданной точке может быть выполнено путевым выключателем SQ1 с нормально закрытым контактом, установленным последовательно с блок-контактом KM2, шунтирующим кнопку SB2. Для остановки электродвигателя рабочего механизма в двух заданных точках последовательно с контактом путевого выключателя SQ1 размещают контакт второго путевого выключателя SQ2. На рис. 5.8 приведены электрические схемы остановки электродвигателя в одной и в двух заданных точках. После пуска двигателя механизм приходит в движение и при достижении места остановки нажимает на путевой выключатель, например SQ1, и электродвигатель останавливается. После выполнения необходимой технологической операции вновь нажимаем на кнопку SB2, и механизм продолжает движение до следующего путевого выключателя SQ2, где технологическая операция заканчивается.
Для остановки электродвигателя рабочего механизма в двух заданных точках последовательно с контактом путевого выключателя SQ1 размещают контакт второго путевого выключателя SQ2. На рис. 5.8 приведены электрические схемы остановки электродвигателя в одной и в двух заданных точках. После пуска двигателя механизм приходит в движение и при достижении места остановки нажимает на путевой выключатель, например SQ1, и электродвигатель останавливается. После выполнения необходимой технологической операции вновь нажимаем на кнопку SB2, и механизм продолжает движение до следующего путевого выключателя SQ2, где технологическая операция заканчивается.
Рис. 5.8 К примеру 5.1
Пример 5.2.
В электрическую схему (рис. 5.5) управления реверсом короткозамкнутого асинхронного двигателя с помощью блокировочных связей следует ввести элементы световой сигнализации для контроля направления вращения двигателя.
Решение. Схема световой сигнализации контроля направления вращения двигателя при реверсе, совмещённая со схемой управления реверсом двигателя, приведена на рис. 5.9. При вращении двигателя, например вправо, горит лампа HL1, включаемая контактом KM1.4 магнитного пускателя KM1, при этом лампа HL2 погашена, т.к. магнитный пускатель KM2 не включён. При вращении двигателя влево горит лампа HL2, включённая контактом KM2.4 магнитного пускателя KM2. Таким образом, лампа HL1 сигнализирует о вращении двигателя вправо, а лампа HL2 — о вращении двигателя влево. В результате блокировочными связями световая сигнализация обеспечивает контроль над направлением вращения двигателя при реверсе.
5.9. При вращении двигателя, например вправо, горит лампа HL1, включаемая контактом KM1.4 магнитного пускателя KM1, при этом лампа HL2 погашена, т.к. магнитный пускатель KM2 не включён. При вращении двигателя влево горит лампа HL2, включённая контактом KM2.4 магнитного пускателя KM2. Таким образом, лампа HL1 сигнализирует о вращении двигателя вправо, а лампа HL2 — о вращении двигателя влево. В результате блокировочными связями световая сигнализация обеспечивает контроль над направлением вращения двигателя при реверсе.
Рис. 5.9 К примеру 5.2
ВАЖНО!
Перед подключением электродвигателя необходимо убедится в правильности в соответствии с его .
Условные обозначения на схемах
(далее — пускатель) — коммутационный аппарат предназначенный для пуска и остановки двигателя. Управление пускателем осуществляется через электрическую катушку, которая выступает в качестве электромагнита, при подаче на катушку напряжения она воздействует электромагнитным полем на подвижные контакты пускателя которые замыкаются и включают электрическую цепь, и наоборот, при снятии напряжения с катушки пускателя — электромагнитное поле пропадает и контакты пускателя под действием пружины возвращаются в исходное положение размыкая цепь.
У магнитного пускателя есть силовые контакты
предназначенные для коммутации цепей под нагрузкой и блок-контакты
которые используются в цепях управления.
Контакты делятся на нормально-разомкнутые
— контакты которые в своем нормальном положении, т.е. до подачи напряжения на катушку магнитного пускателя или до механического воздействия на них, находятся в разомкнутом состоянии и нормально-замкнутые
— которые в своем нормальном положении находятся в замкнутом состоянии.
В новых магнитных пускателях имеется три силовых контакта и один нормально-разомкнутый блок-контакт. При необходимости наличия большего количества блок-контактов (например при сборке ), на магнитный пускатель сверху дополнительно устанавливается приставка с дополнительными блок-контактами (блок контактов) которая, как правило, имеет четыре дополнительных блок-контакта (к примеру два нармально-замкнутых и два нормально-разомкнутых).
Кнопки для управления электродвигателем входят в состав кнопочных постов, кнопочные посты могут быть однокнопочные, двухкнопочные, трехкнопочные и т. д.
д.
Каждая кнопка кнопочного поста имеет по два контакта — один из них нормально-разомкнутый, а второй нормально-замкнутый, т.е. каждая из кнопок может использоваться как в качестве кнопки «Пуск» так и в качестве кнопки «Стоп».
Схема прямого включения электродвигателя
Данная схема является самой простой схемой подключения электродвигателя, в ней отсутствует цепь управления, а включение и отключение электродвигателя осуществляется автоматическим выключателем.
Главными достоинствами данной схемы является дешевизна и простота сборки, к недостаткам же данной схемы можно отнести то, что автоматические выключатели не предназначены для частого коммутирования цепей это, в сочетании с пусковыми токами, приводит к значительному сокращению срока службы автомата, кроме того в данной схеме отсутствует возможность устройства дополнительной защиты электродвигателя.
Схема подключения электродвигателя через магнитный пускатель
Эту схему так же часто называют схемой простого пуска электродвигателя
, в ней, в отличии от предыдущей, кроме силовой цепи появляется так же цепь управления.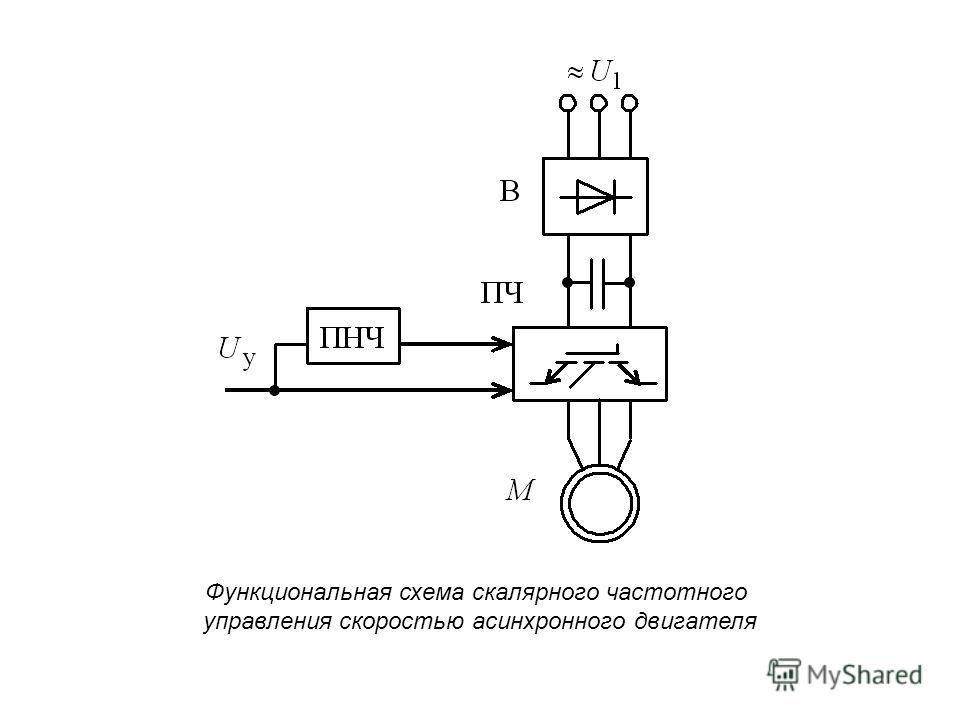
При нажатии кнопки SB-2 (кнопка «ПУСК») подается напряжение на катушку магнитного пускателя KM-1, при этом пускатель замыкает свои силовые контакты KM-1 запуская электродвигатель, а так же замыкает свой блок-контакт KM-1.1, при отпускании кнопки SB-2 ее контакт снова размыкается, однако катушка магнитного пускателя при этом не обесточивается, т.к. ее питание теперь будет осуществляться через блок-контак KM-1.1 (т.е. блок-контак KM-1.1 шунтирует кнопку SB-2). Нажатие на кнопку SB-1 (кнопка «СТОП») приводит к разрыву цепи управления, обесточиванию катушки магнитного пускателя, что приводит к размыканию контактов магнитного пускателя и как следствие, к остановке электродвигателя.
Реверсивная схема подключения электродвигателя (Как изменить направление вращения электродвигателя?)
Что бы поменять направление вращения трехфазного электродвигателя необходимо поменять местами любые две питающие его фазы:
При необходимости частой смены направления вращения электродвигателя применяется :
В данной схеме применяется два магнитных пускателя (KM-1, KM-2) и трехкнопочный пост, магнитные поскатели применяемые в данной схеме кроме нормально-разомкнутого блок-контакта должны так же иметь и нормально замкнутый контакт.
При нажатии кнопки SB-2 (кнопка «ПУСК 1») подается напряжение на катушку магнитного пускателя KM-1, при этом пускатель замыкает свои силовые контакты KM-1 запуская электродвигатель, а так же замыкает свой блок-контакт KM-1.1 который шунтирует кнопку SB-2 и размыкает свой блок-контакт KM-1.2 который защищает электродвигатель от включения в обратную сторону (при нажатии кнопки SB-3) до его предварительной остановки, т.к. попытка запуска электродвигателя в обратную сторону без предварительного отключения пускателя KM-1 приведет к короткому замыканию. Что бы запустить электродвигатель в обратную сторону необходимо нажать кнопу «СТОП» (SB-1), а затем кнопку «ПУСК 2» (SB-3) которая запитает катушку магнитного пускателя KM-2 и запустит электродвигатель в обратную сторону.
10
Схема Электрическая Принципиальная Асинхронного Двигателя
Схема используется для привода механизмов, не требующих реверса, длительность торможения которых после отключения двигателя не имеет существенного значения.
Устройство двигателя
9 комментариев
Изготовление таких электродвигателей производится в очень широком диапазоне мощностей, где номинал устройства может составлять всего лишь несколько ватт, а может иметь мощность и в десятки мегаватт. Разберем принцип работы всех этих схем.
Типовые схемы разомкнутых систем управления электродвигателями
После размыкания контакта реле времени РДТ схема приходит в исходное состояние, двигатель плавно останавливается. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя из двигателя выходит три провода , выведены наружу выходит шесть проводов , выведены в распределительную коробку в коробку выходит шесть проводов, из коробки три.
Буду знать, куда зайти, если нужна будет информация по запуску двигателя. При неподвижном роторе магнитные поля Фа и Фв создают одинаковые по величине, но противоположны по знаку крутящиеся моменты М1 и М2. Обмотка создает неподвижный в пространстве магнитный поток.
При неподвижном роторе магнитные поля Фа и Фв создают одинаковые по величине, но противоположны по знаку крутящиеся моменты М1 и М2. Обмотка создает неподвижный в пространстве магнитный поток.
Во время преодоления однофазным двигателем номинальной нагрузки создается небольшое скольжение с основной долей прямого крутящего момента Мпр. В этом случае используются электромагнитные пускатели с катушками на напряжение , 48, 36 или 24 В. Основными положительными характеристиками короткозамкнутых асинхронных электродвигателей являются их высокая надежность, незначительная масса, компактность, более высокий срок службы, чем у двигателей внутреннего сгорания аналогичной мощности. Такая схема изображена на рис.
Реостатный пуск асинхронного двигателя с кз ротором.
Возможно использование понижающего трансформатора для понижения напряжения в схеме управления. Анимация процессов, протекающих в схеме показана ниже. Рассмотренная схема является основой построения схем управления электродвигателями двухскоростных транспортеров подачи раскряжевочных агрегатов, сортировочных конвейеров и т.
Такие схемы также часто дополняются различными контактами реле, выключателей, переключателей и датчиков. Схема подключения двигателя по реверсивной схеме.
Особенности электрических двигателей
Такая схема показана на рис. Это энергия рассеивается как тепло.
Поэтому контактор К2М в этот период не включается. Шаговый режим работы двигателя создает благоприятные условия наладки.
Фазное напряжение — разница потенциалов между началом и концом одной фазы. При замыкании контакта К1А.
Схема управления асинхронным электродвигателем с коротко-замкнутым ротором с использованием магнитного пускателя и воздушного автоматического выключателя. Подвижная часть пускателя притягивается к неподвижной, замыкая при этом свои контакты. Одной из преимуществ использования асинхронных двигателей с короткозамкнутым ротором является простота их включения в сеть. Таким образом, в магнитном поле будет находиться замкнутый проводник с током, на который согласно закону Ампера будет действовать сила, в результате чего контур начнет вращаться.
Таким образом, в магнитном поле будет находиться замкнутый проводник с током, на который согласно закону Ампера будет действовать сила, в результате чего контур начнет вращаться.
Нереверсивная схема управления асинхронного двигателя.
Они во многом играют важную роль, например, подшипники качения, обеспечивают возможность плавности хода, корпус защищает от механического воздействия на основные рабочие части, вентилятор обеспечивает обдув двигателя и отвод тепла, выделяемого при работе, но на принцип преобразования электрической энергии в механическую не влияют. Применение синхронных электродвигателей не допускает частых пусков, поэтому, как правило, их используют в условиях относительно неизменной нагрузки, при необходимости обеспечения постоянной скорости вращения. Реверсивный пуск асинхронного двигателя с короткозамкнутым ротором Такая схема запуска приведена на рис.
Это позволяет проводить смену инструмента, наладку станка с легким поворотом приводного вала и ротора электродвигателя.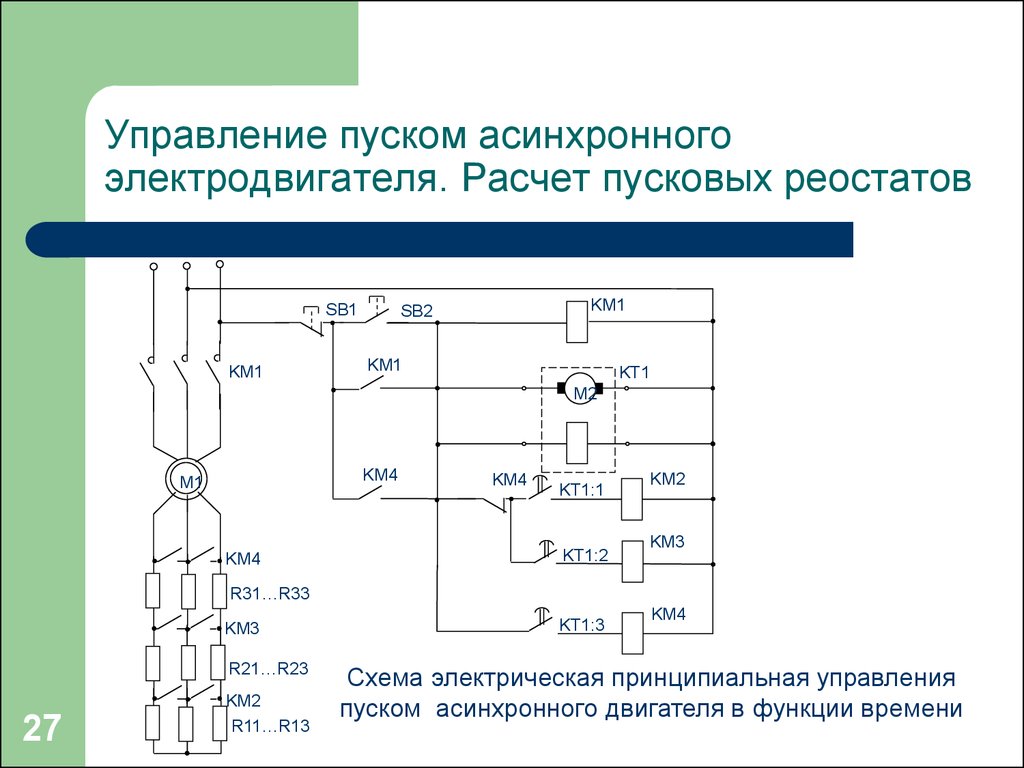 Особенности электрических двигателей Устройство синхронных электродвигателей очень напоминает синхронный генератор. Изменение направления вращения реверс ротор двигателя меняет при изменении порядка чередования фаз на его статоре.
Особенности электрических двигателей Устройство синхронных электродвигателей очень напоминает синхронный генератор. Изменение направления вращения реверс ротор двигателя меняет при изменении порядка чередования фаз на его статоре.
Главные вкладки
Поэтому асинхронный электродвигатель имеет вентилятор для охлаждения. Применение двухцепных кнопок позволяет осуществить дополнительную электрическую блокировку, исключающую одновременное включение контакторов K1 и К2, а также К3 и К4. Дополнительные контакты в цепях пускателей не дают пускателям включится одновременно, так как какой-либо из пускателей при нажатии на обе кнопки «Пуск» включиться на секунду раньше и разомкнет свой контакт в цепи другого пускателя. Поэтому Д2М не сразу включится и его размыкающий контакт Д2А. Электродвигатель подключается к сети при помощи кнопки S1, контакта K1A и силовых контактов К1 1—3 М.
Схема последовательного управления двигателем (3 схемы) с выключателем, таймером, ПЛК
12. 06.2021
06.2021
Инженер
ИНСТРУМЕНТ
0
Цепь последовательного управления двигателями — это цепь, которая управляет последовательной работой двигателей. Один двигатель не может запуститься, пока не заработает другой двигатель.
Например, последовательное управление используется такими машинами, как гидравлические прессы. Нагнетающий насос работает до того, как можно будет использовать гидравлические клапаны. Или потому, что некоторые системы кондиционирования воздуха требуют, чтобы вентилятор работал до запуска компрессора. Давайте узнаем о некоторых из следующих последовательных схем.
>>> См. также:
4 Схема пускателя звезда-треугольник
Что такое контактор? Лучшая статья о контакторе
Как реверсировать трехфазный двигатель с помощью переключателя, ПЛК, инвертора (5 цепей)
Цепь динамического торможения и обратного торможения асинхронного двигателя
1. Цепь последовательного управления с помощью кнопки
– Схема подключения
Последовательная схема с использованием 3 наборов кнопок ВКЛ и ВЫКЛ для управления запуском и остановом двигателя.
+ В силовой цепи каждый двигатель подключен к отдельному контактору. И защищен от перегрузки тепловым реле.
+ Набор кнопок ВКЛ1, ВЫКЛ1 для управления двигателем 1.
+ Набор кнопок ВКЛ2, ВЫКЛ2 последовательно с кнопкой ВКЛ1 для управления двигателем 2
+ Две кнопки ВКЛ3, ВЫКЛ3 последовательно с кнопками ВКЛ1 , ON2 для управления двигателем 3.
Схема последовательного подключения с помощью кнопки
– Принцип работы
Двигатель 2 и двигатель 3 могут работать только при работающем двигателе 1, а двигатель 3 может работать только при работающем двигателе 2.
+ При нажатии ON1 включается контактор K1, изменяя состояние контактов контактора. Главный контакт контактора К замыкается для подачи питания на двигатель 1. В то же время нормально разомкнутый контакт К1 замыкается, чтобы цепь оставалась замкнутой после того, как кнопка ВКЛ1 возвращается в разомкнутое состояние.
+ Контакт K1 замкнут, поэтому двигатель 2 готов к работе, когда мы нажимаем кнопку ON2.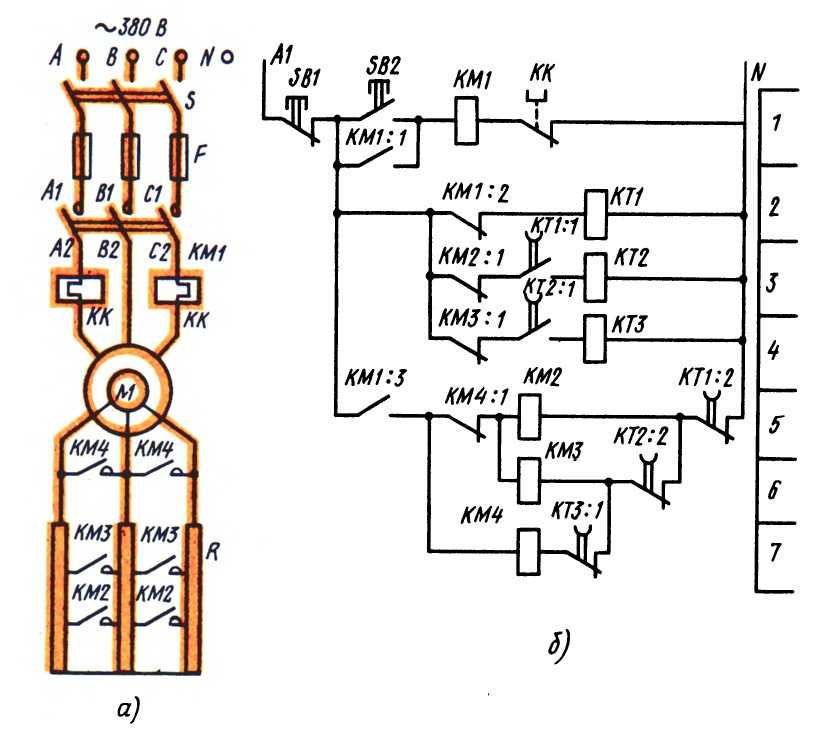
+ Аналогично, когда двигатель 2 работает, если мы нажмем кнопку ON3, немедленно запустится двигатель 3.
+ Нажимаем кнопку OFF3, чтобы остановить двигатель 3, нажимаем OFF2, чтобы остановить двигатель 2 и двигатель 3. И когда мы нажимаем кнопку OFF1, чтобы остановить двигатель 1, 2, 3.
2. Цепь управления с использованием таймера – Схема подключения цепи последовательного управления двигателем с использованием таймера
+ Схема подключения цепи последовательного управления, которая автоматически переключается с помощью только одного набора кнопок ВКЛ./ВЫКЛ.
+ Катушка таймера T1 параллельно соединит катушку контактора K2. А катушка таймера Т1 включена последовательно с нормально замкнутым контактом К2. Таким образом, при включении контактора К2 таймер отключается от источника питания, но контактор К1 остается активным.
Схема подключения цепи последовательности работает автоматически
– Принцип работы:
+ Когда мы нажимаем кнопку ON, контакт K1 замыкается, поэтому двигатель 1 работает. В то же время катушка Таймера Т1 также находится под напряжением и начинает отсчет времени.
В то же время катушка Таймера Т1 также находится под напряжением и начинает отсчет времени.
+ Когда Таймер отсчитывает заданное время, нормально разомкнутый контакт T1 замыкается для подачи питания на контактор K2, после чего работает двигатель 2.
Нормально замкнутый контакт K2 размыкается, обесточивая катушку таймера T1. В то же время нормально разомкнутый контакт К2 замыкается, чтобы контактор К2 оставался в рабочем состоянии. И катушка таймера Т2 тоже запитана и начинает отсчет.
+ Когда таймер T2 досчитывает заданное время, контактор K3 включается. Затем двигатель 3 будет работать, а катушка таймера Т2 отключится от источника питания.
См. Моделирование видео о схеме управления последовательностями, используя таймер
3. Схема управления последовательным двигателем с использованием PLC
Схема управления последовательным двигателем с использованием PLC
3.1 Диаграмм проводки
Диаграмма проводки с использованием PLC является следующим:
2
Проводная диаграмма PLC. + Кнопка ВКЛ подключена к входу Х0, а кнопка ВЫКЛ подключена к входу Х1. В отличие от двух вышеупомянутых схем, для цепей ПЛК люди часто используют кнопку OFF в нормально разомкнутом положении, а не в нормально замкнутом.
+ Выходы Y0, Y1, Y2 ПЛК подключаются к катушке контактора К1, К2, К3.
+ Нормально замкнутый контакт теплового реле будет включен последовательно с катушкой контактора.
Схема цепи последовательного управления двигателем с помощью ПЛК
3.2 Программа последовательного управления цепями на ПЛК
Программа ПЛК работает следующим образом:
+ При нажатии кнопки ВКЛ. включен, поэтому цепь замкнута, активируется выход Y0. В это время катушка контактора К1 находится под напряжением, поэтому двигатель 1 работает. При этом таймер Т1 начинает отсчитывать время.
При этом таймер Т1 начинает отсчитывать время.
+ Когда T1 доходит до 10 с, активируется выход Y1 и начинает отсчет таймер T2. Когда Y1 включается, контакт K2 замыкается, поэтому двигатель 2 работает.
+ Аналогично, когда T2 дойдет до заданного времени (10 с), ПЛК активирует выход Y2, двигатель 3 начнет работать.
+ Когда мы нажмем X1, Y0 будет отключен, поэтому выход Y1 и Y2 отключится. Работа программы возвращается в исходное состояние.
Программа управления последовательностью на ПЛК
Методы управления скоростью различных типов двигателей с регулированием скорости
Скачать PDF
Kazuya SHIRAHATA
Компания Oriental Motor Co., Ltd. предлагает широкий выбор двигателей с регулируемой скоростью. Наши блоки управления скоростью включают в себя двигатель, привод (контроллер) и потенциометр, который позволяет легко регулировать скорость. Существует три группы двигателей с регулированием скорости. «Моторный блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсатором, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Инверторный блок», который сочетает в себе трехфазный асинхронный двигатель с маленький инвертор. В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
«Моторный блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсатором, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Инверторный блок», который сочетает в себе трехфазный асинхронный двигатель с маленький инвертор. В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
1. Введение
Большое количество двигателей используется для общих целей в нашем окружении, от бытовой техники до станков на промышленных предприятиях. Электродвигатель в настоящее время является необходимым и незаменимым источником энергии во многих отраслях промышленности. Функции и характеристики, необходимые для этих двигателей, очень разнообразны. Если сосредоточить внимание на сегменте управления скоростью на рынке двигателей, серводвигатели и шаговые двигатели регулируют свою скорость с помощью последовательности импульсов, в то время как асинхронный двигатель и бесщеточный двигатель постоянного тока регулируют скорость с помощью внешнего резистора и/или напряжения постоянного тока.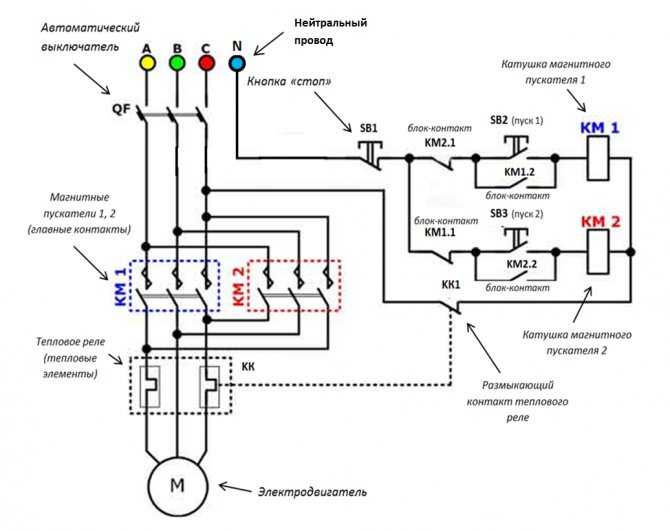
В этой статье объясняется структура, принцип управления скоростью и характеристики следующих трех групп продуктов, которые могут относительно легко управлять скоростью с помощью аналогового входа.
- Двигатель переменного тока с регулятором скорости и мотор-редукторы
- Бесщеточный двигатель постоянного тока и мотор-редукторы
- Блок инвертора
2. Методы управления скоростью различных двигателей с регулированием скорости
Методы управления выходом схемы управления скоростью можно условно разделить на две группы: фазовое управление и управление инвертором, которые составляют группы продуктов, показанные на рис. 1.
Рис. 1 Классификация двигателей с регулируемой скоростью
2.1. Двигатели переменного тока с регулируемой скоростью
2.1.1. Конструкция двигателя
Как показано на рис. 2, конструкция однофазных и трехфазных асинхронных двигателей включает в себя статор, на который намотана первичная обмотка, и литой из цельного алюминия ротор в форме корзины. Ротор недорогой, потому что конструкция проста и не использует магнит.
Ротор недорогой, потому что конструкция проста и не использует магнит.
Рис. 2 Конструкция асинхронного двигателя
Когда необходимо контролировать скорость этого двигателя, для определения скорости используется тахогенератор, который крепится к двигателю, как показано на рис. 3. Тахогенератор состоит из магнита, подключенного непосредственно к вал двигателя и катушка статора, которая обнаруживает магнитные полюса и генерирует переменное напряжение с частотой 12 циклов на оборот. Поскольку это напряжение и частота увеличиваются с увеличением скорости вращения, скорость вращения двигателя регулируется на основе этого сигнала.
Рис. 3 Система управления двигателем переменного тока
2.1.2. Принцип управления скоростью
Скорость вращения N асинхронного двигателя можно выразить выражением (1). Когда напряжение, подаваемое на двигатель, увеличивается и уменьшается, скольжение с изменяется, то скорость вращения N будет изменяться.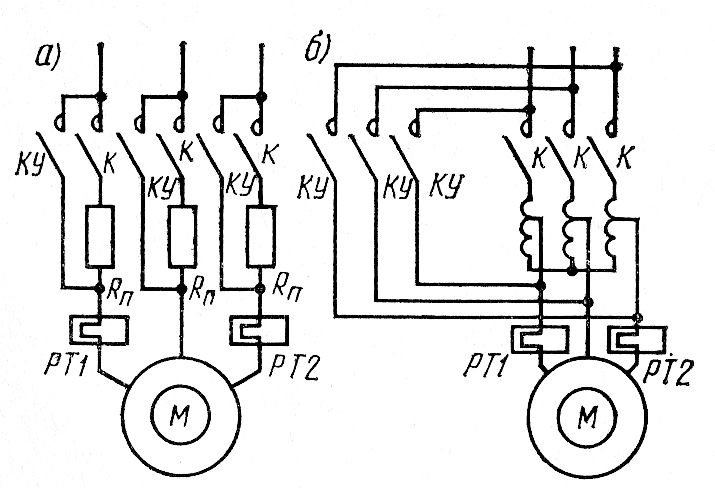
N = 120· f ·(1- s )/ P · · · · · · · · · · (1)
N : Скорость вращения [об/мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
В случае асинхронного двигателя, как показано на рис. 4, существует стабильный и нестабильный диапазоны на кривой Скорость вращения — Крутящий момент. Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление без обратной связи) ограничивается управлением скоростью в узком диапазоне, подобном N1~N3 на рис. 5. Чтобы сделать возможной надежную работу даже в В вышеупомянутом нестабильном диапазоне необходимо определить скорость вращения двигателя и использовать механизм управления напряжением (управление с обратной связью), который уменьшает ошибку скорости по сравнению с заданным значением.
Рис. 4 Скорость вращения – характеристики крутящего момента асинхронных двигателей
Рис. 5 Простое управление напряжением
5 Простое управление напряжением
Доступные методы управления напряжением включают управление с помощью трансформатора или фазового управления. На рис. 6 показано, когда напряжение регулируется с помощью трансформатора. Этот метод не так просто реализовать с двигателем переменного тока с регулируемой скоростью. В качестве альтернативы напряжение переменного тока можно регулировать, устанавливая время ВКЛ/ВЫКЛ каждого полупериода напряжения переменного тока (50 или 60 Гц), подаваемого на двигатель, с помощью переключающего элемента (тиристора или симистора), который может напрямую включать и выключать переменный ток. напряжения, как показано на рис. 7 и рис. 8. Управление скоростью достигается методом фазового управления путем управления среднеквадратичным значением. значение переменного напряжения.
Рис. 6 Изменение напряжения с помощью трансформатора
Рис. 7 Изменение напряжения с помощью фазового контроля
Рис. управление фазой с обратной связью даже в нестабильном диапазоне.
управление фазой с обратной связью даже в нестабильном диапазоне.
На рис. 9 в виде блок-схемы показана конфигурация системы управления скоростью для двигателя переменного тока с регулированием скорости.
Рис. 9 Блок-схема системы управления двигателем переменного тока
Рис. 10 Форма волны для каждого блока
На рис. 10 показаны формы волны для каждого блока. Заданное значение скорости d и обнаруженное напряжение e скорости, генерируемой тахогенератором, сравниваются в блоке усилителя сравнения. Затем определяется уровень сигнала напряжения a .
Сигнал напряжения и низкий, когда значение обнаруженной скорости достигает заданного значения скорости, и выше, когда заданное значение скорости снижается. Поскольку триггерный сигнал выводится в точке, где треугольная волна b пересекается с сигналом напряжения a , определяется время (фазовый угол) включения симистора с уровнем сигнала напряжения a . Когда это время медленное, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается. Пониженная скорость вращения снова возвращается, и управление повторяется, так что разница между обнаруженным значением скорости и заданным значением скорости всегда может быть постоянной.
Когда это время медленное, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается. Пониженная скорость вращения снова возвращается, и управление повторяется, так что разница между обнаруженным значением скорости и заданным значением скорости всегда может быть постоянной.
На рис. 11 показан внешний вид вышеупомянутого регулятора скорости. На рис. 11 рабочая точка двигателя рисует петлю Q-R-S-T-Q с центром в точке O, а скорость вращения поддерживается между N1 и N2. Эта петля максимально уменьшена за счет повышения точности определения скорости.
Рис. 11 Работа регулятора скорости
Электродвигатель регулятора скорости переменного тока имеет следующие особенности при использовании фазового регулирования с обратной связью.
1) Поскольку напряжение переменного тока регулируется напрямую, схема управления скоростью может быть сконфигурирована просто потому, что сглаживающая схема не нужна, что позволяет получить компактную конструкцию по низкой цене.
2) Точно так же возможна конструкция с длительным сроком службы, поскольку не нужен большой алюминиевый электролитический конденсатор.
3) Переключение выполняется только один раз в каждом полупериоде стандартного источника питания переменного тока, что снижает уровень создаваемого шума.
2.1.3. Характеристики
Двигатели переменного тока с регулированием скорости вращения обычно имеют характеристики скорости вращения и крутящего момента, показанные на рис. 12.
Рис. 12. «Линия безопасной эксплуатации» представляет собой ограничение, при котором двигатель может работать в непрерывном режиме без превышения максимально допустимой температуры.
2.2. Бесщеточный блок управления скоростью постоянного тока
2.2.1. Конструкция двигателя
Что касается конструкции бесщеточного двигателя, то катушка соединена звездой (звездой) с тремя фазами: U, V и W и расположена в статоре, а ротор состоит из магнитов. намагничены в многополюсной конфигурации, как показано на рис. 14.
намагничены в многополюсной конфигурации, как показано на рис. 14.
Внутри статора три ИС Холла расположены как магнитные элементы, так что разность фаз выходного сигнала от каждой ИС Холла будет составлять 120 градусов на каждый оборот ротор.
Рис. 14 Конструкция бесщеточного двигателя постоянного тока
2.2.2. Принцип управления скоростью
Как показано на рис. 15, характеристики скорости вращения бесщеточного двигателя постоянного тока имеют отрицательный наклон, когда его скорость не регулируется, что аналогично характеристике коллекторного двигателя постоянного тока.
Рис. 15 Характеристики вращательного момента бесщеточного двигателя постоянного тока скорость N1. Когда приложен момент нагрузки T1, рабочая точка смещается к Q, а скорость вращения уменьшается до N2, однако скорость вращения возвращается к N1, если напряжение повышается до V3. Следовательно, поскольку скорость вращения изменяется всякий раз, когда изменяется крутящий момент нагрузки, механизм управления скоростью должен будет изменять входное напряжение только всякий раз, когда наблюдается изменение скорости, чтобы поддерживать постоянную скорость на линии PR.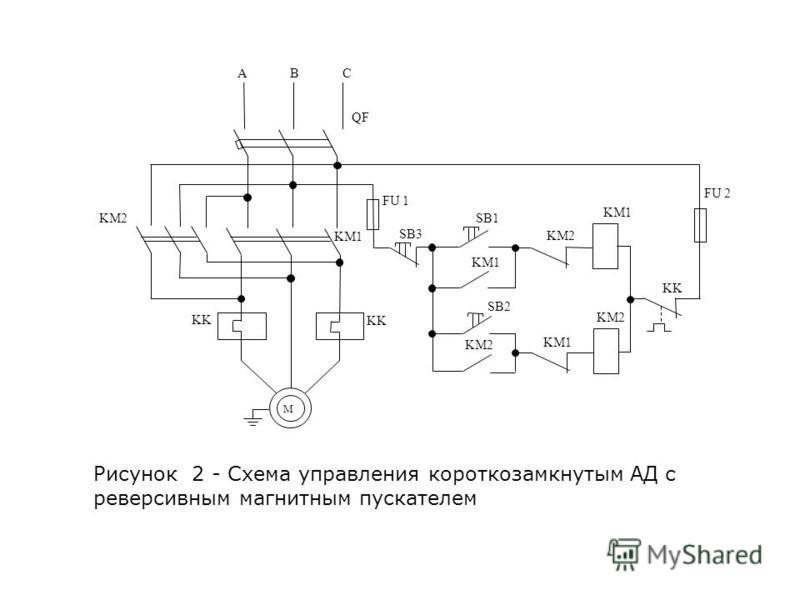
Это управление напряжением осуществляется инвертором в выходной части цепи управления (драйвер). Этот инвертор генерирует трехфазное переменное напряжение из постоянного тока путем включения и выключения, как показано на рис. 16 (b), с помощью шести переключающих элементов (FET или IGBT), показанных на рис. 16 (a).
Рис. 16 (a) Выходная часть цепи управления (драйвер)
Рис. 16 (b) Последовательность переключения 16 (а), а состояние ВКЛ/ВЫКЛ переключающего элемента определяет, какая катушка статора находится под напряжением и в каком направлении будет течь ток, то есть какая катушка становится полюсом N или полюсом S.
Фактически, положение магнитного полюса ротора определяется интегральной микросхемой Холла, и соответствующий переключающий элемент включается или выключается, как показано на рис. 16 (b). Например, в случае шага 1 транзисторы Tr1 и Tr6 включены, и ток течет из фазы U в фазу W. В это время U-фаза возбуждается как полюс N, а W-фаза становится полюсом S, и ротор поворачивается на 30 градусов, переходя к шагу 2.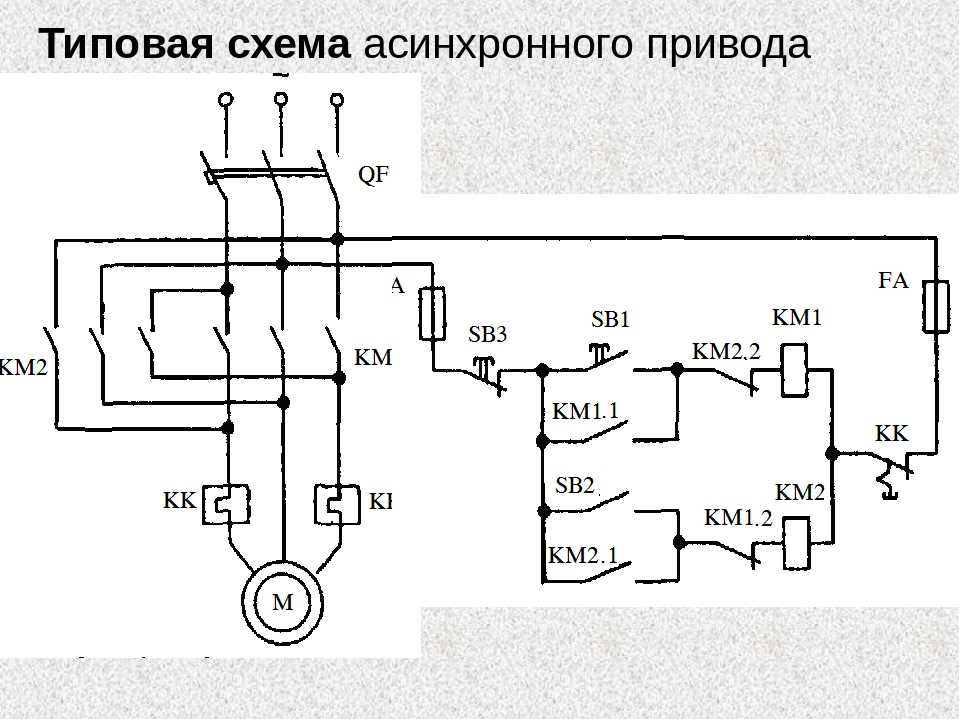 Один оборот ротора выполняется путем повторения этой операции 12 раз (шаг 1). ~ 12).
Один оборот ротора выполняется путем повторения этой операции 12 раз (шаг 1). ~ 12).
На рис. 17 показана конфигурация для управления скоростью бесщеточного двигателя постоянного тока в виде блок-схемы.
Рис. 17 Блок-схема системы бесщеточного двигателя постоянного тока
Последовательность переключения инвертора определяется сигналом от микросхемы Холла в части определения положения блок-схемы, и двигатель вращается.
Затем сигнал от интегральной схемы Холла отправляется на детектор скорости, чтобы стать сигналом скорости, и он сравнивается с сигналом задания скорости в блоке усилителя сравнения, который затем генерирует сигнал отклонения. Значение входного тока двигателя определяется блоком настройки ШИМ на основе сигнала отклонения. 9Бесщеточные двигатели постоянного тока 0160 имеют следующие особенности.
1) Он имеет высокий КПД, поскольку используется ротор с постоянными магнитами, а вторичные потери малы.
2) Инерция ротора может быть уменьшена, и достигается высокая скорость отклика.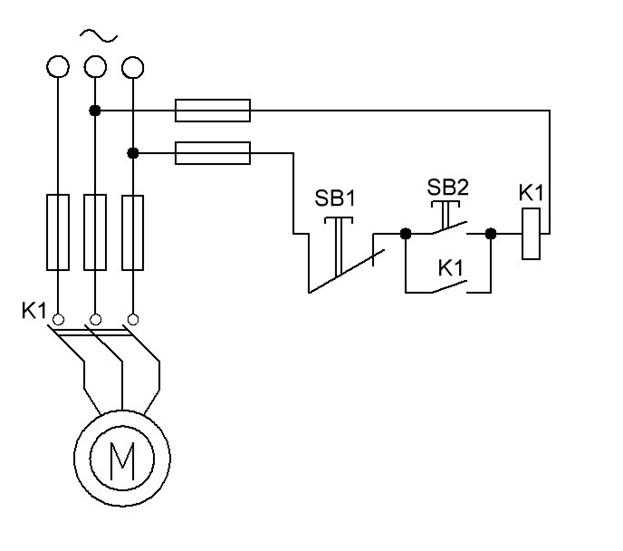
3) Двигатель можно уменьшить, поскольку он очень эффективен.
4) Небольшие колебания скорости при изменении нагрузки.
На рис. 16 показана типичная последовательность переключения (метод подачи питания на 120 градусов). Еще более эффективная система бесщеточного двигателя постоянного тока использует метод синусоидального привода, получая информацию о положении ротора с высоким разрешением от программного обеспечения из сигнала Холла IC. Этот метод приводит к малошумному приводу, поскольку ток, который течет к двигателю, не изменяется быстро. (2)
Рис. 18 Сравнение напряжений, прикладываемых методом синусоидального привода и методом 120-градусного привода
2.2.3. Характеристики
Характеристики скорости вращения бесщеточного двигателя постоянного тока имеют ограниченный рабочий диапазон в дополнение к непрерывному рабочему диапазону.
Зона ограниченного режима работы очень эффективна при запуске инерционной нагрузки. Однако, когда работа в ограниченном режиме продолжается в течение пяти секунд или более, активируется функция защиты привода от перегрузки, и двигатель замедляется до полной остановки.
Однако, когда работа в ограниченном режиме продолжается в течение пяти секунд или более, активируется функция защиты привода от перегрузки, и двигатель замедляется до полной остановки.
2.3. Блок управления скоростью инвертора
2.3.1. Принцип управления скоростью
Инверторный блок регулирует скорость трехфазного асинхронного двигателя путем изменения частоты f напряжения, подаваемого на двигатель. Блок инвертора изменяет частоту f, изменяя цикл ВКЛ/ВЫКЛ шести переключающих элементов, а скорость вращения (N) двигателя изменяется пропорционально выражению в формуле (1).
N = 120· f ·(1- s )/ P ·· · · · · · · · · (1)
N : Скорость вращения [об/мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
Кроме того, чтобы напряжение, подаваемое на обмотку, имело синусоидальную форму, инвертор регулирует рабочий цикл ВКЛ/ВЫКЛ, как показано на рис.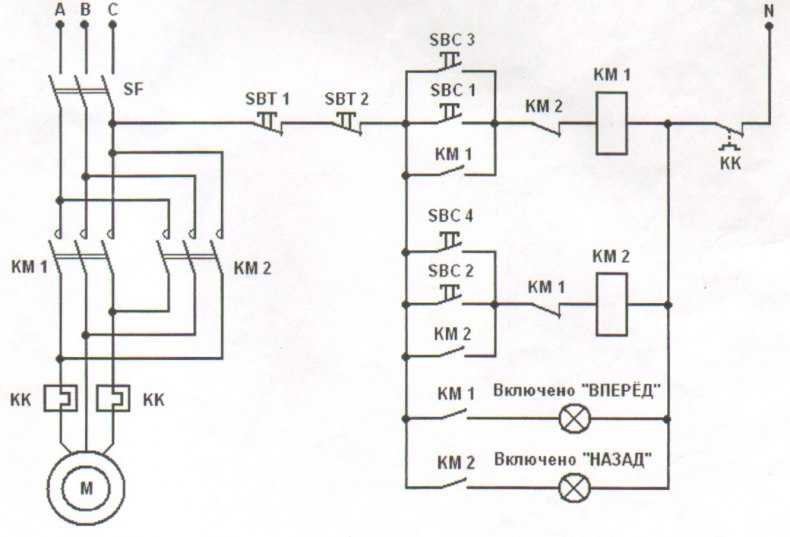 21. Время ВКЛ/ВЫКЛ регулируется таким образом, чтобы среднее напряжение, двигатель приобретает синусоидальную форму путем сравнения треугольной волны, называемой несущей, с синусоидальной формой сигнала. Этот метод называется ШИМ-управлением.
21. Время ВКЛ/ВЫКЛ регулируется таким образом, чтобы среднее напряжение, двигатель приобретает синусоидальную форму путем сравнения треугольной волны, называемой несущей, с синусоидальной формой сигнала. Этот метод называется ШИМ-управлением.
Рис. 19 Управление работой ВКЛ/ВЫКЛ
Метод управления скоростью наших инверторных блоков делится на два типа: управление без обратной связи, которое просто изменяет скорость, и управление с обратной связью, которое снижает скорость изменение при изменении нагрузки двигателя.
1) Управление без обратной связи
На рис. 22 показана конфигурация системы управления в виде блок-схемы.
Рис. 20 Блок-схема управления без обратной связи
Этот метод используется для изменения входного напряжения и частоты двигателя в соответствии с заданной частотой. Этот метод подходит для изменения скорости и может достигать высоких скоростей (частота может быть установлена до 80 Гц) просто тогда, когда регулирование скорости при различных нагрузках не так важно.
Создаваемый крутящий момент T двигателя определяется формулой (2). Из этого соотношения можно сказать, что крутящий момент также будет постоянным, если V/f, отношение напряжения V к частоте f, будет постоянным.
T = K ・ I・V / f ・・・3 (920)
t : крутящий момент [N · M]
v : напряжение источника питания [V]
i : Ток двигателя [A]
f : Частота [HZ]
f : Частота [HZ]
f : Частота [HZ]
f : Частота [HZ]
f .0007
Однако, чем ниже скорость, тем труднее поддерживать постоянным входное сопротивление асинхронного двигателя при изменении f. Следовательно, чтобы получить постоянный крутящий момент от низкой скорости до высокой, необходимо отрегулировать отношение V/f на низкой скорости в соответствии с характеристиками двигателя, как показано сплошной линией на рис. 23.
23.
Рис. 21 Управление V/f
2) Управление с обратной связью
На рис. 24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
Рис. 22 Блок-схема управления с обратной связью
Этот метод определяет разность фаз между напряжением выходного блока инвертора и первичным током, который вычисляет частоту возбуждения, соответствующую нагрузке, используя данные характеристик. таблице (рис. 25), подготовленной заранее, и регулирует частоту преобразователя без необходимости использования датчика скорости на двигателе.
Рис. 23 Характеристики Таблица
С помощью этой таблицы характеристик и обнаруженного времени разности фаз t инвертор вычисляет выходную частоту инвертора, которая соответствует команде скорости вращения Nset, установленной потенциометром скорости, и выводит ее как выходную частоту инвертора. После получения выходной частоты блок управления V/f вычисляет напряжение, подаваемое на двигатель, соответствующее выходной частоте f, и выполняет управление скоростью, управляя инвертором PWM. В результате при приложении нагрузки выходная частота инвертора повышается, так что можно компенсировать снижение скорости вращения. (3)
После получения выходной частоты блок управления V/f вычисляет напряжение, подаваемое на двигатель, соответствующее выходной частоте f, и выполняет управление скоростью, управляя инвертором PWM. В результате при приложении нагрузки выходная частота инвертора повышается, так что можно компенсировать снижение скорости вращения. (3)
2.3.2. Характеристика s
Характеристики скорости вращения и крутящего момента инверторного блока показаны на Рис. 26 и Рис. 27. Как поясняется в разделе, посвященном двигателю с регулированием скорости переменного тока, на характеристике крутящего момента нарисована «линия безопасной работы». Эта линия представляет собой предел непрерывной работы, а область под этой линией называется областью непрерывной работы.
Рис. 24. Характеристики скорости вращения для управления без обратной связи
) для использования в широком диапазоне приложений управления скоростью.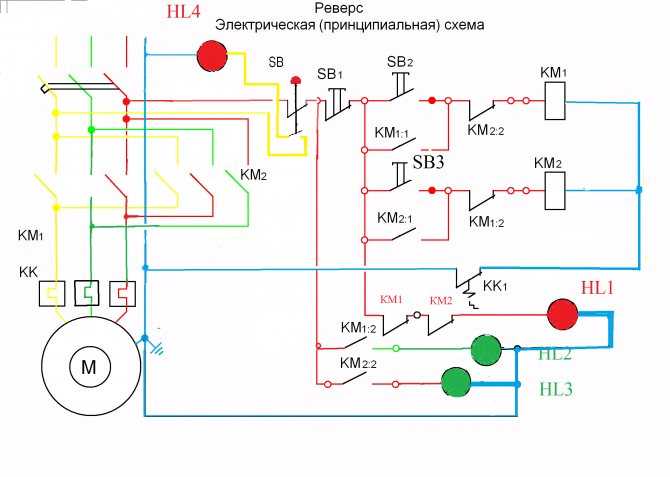 Подходящий продукт для управления скоростью можно выбрать в соответствии с функцией, производительностью, стоимостью и целью, необходимой для вашего приложения.
Подходящий продукт для управления скоростью можно выбрать в соответствии с функцией, производительностью, стоимостью и целью, необходимой для вашего приложения.
Oriental Motor продолжит работу над разработкой продукции, чтобы в будущем мы могли предлагать продукцию, которая наилучшим образом отвечает различным потребностям наших клиентов.
Ссылки
(1) Исследовательская группа по технологиям двигателей переменного тока: «Книга для понимания малых двигателей переменного тока», Kogyo Chosakai Publishing (1998)
(2) Кадзуо Абэ: «Технология бесщеточного двигателя с низким уровнем шума», RENGA No. 163, стр. 19-25 (2003)
(3) Кодзи Намихана, Масаёси Сато: «Новый метод управления трехфазным асинхронным двигателем», RENGA № 159, стр. 23-28 (1999)
| Kazuya Shirahata Завод Tsuruoka, ACIX Operations Circuit Technology Division Секция разработки схемы |
. Недостатком неколлекторных двигателей, однако, была их неспособность Следующие цепи управления интересны тем, что они преодолевают Симисторная схема управления скоростью для асинхронных двигателей Симисторная схема управления скоростью для асинхронных двигателей, показанная на РИС. РИС. 1 Скорость симистора — схема управления асинхронными двигателями. По РКА. (А. Асинхронные двигатели с пуском от сопротивления и пуском от конденсатора могут управляться симистором Эта схема значительно превосходит схему с одним тиристором и фазовым управлением. «демпферная сеть» RC, подключенная к симистору, как правило, не |
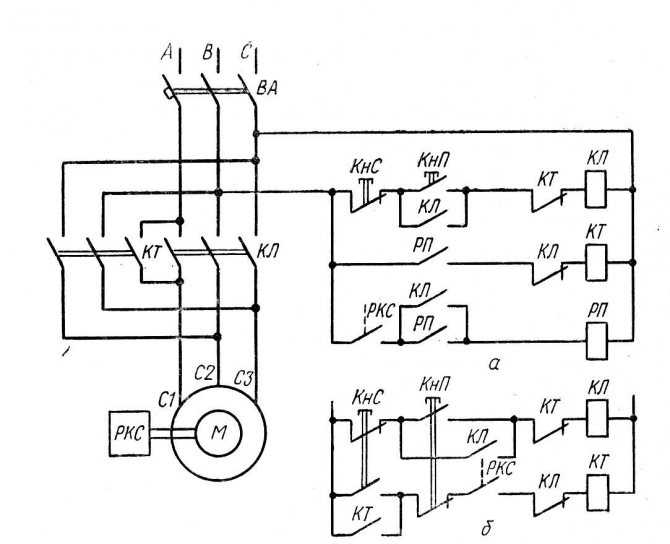 Бесколлекторная электрическая машина всегда оценивалась положительно за
Бесколлекторная электрическая машина всегда оценивалась положительно за В настоящее время; с твердотельным
В настоящее время; с твердотельным 1
1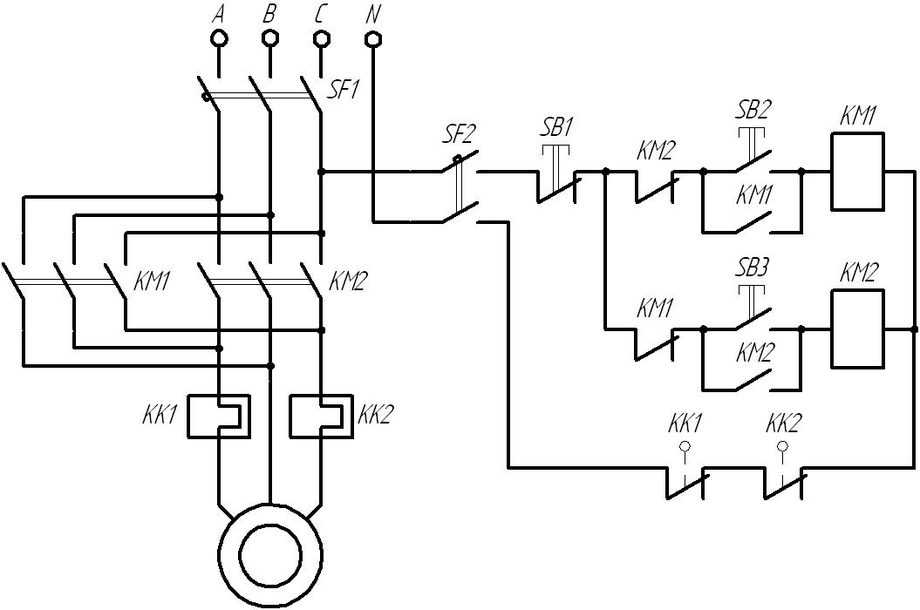 ) Еще один благоприятный аспект
) Еще один благоприятный аспект
 Виновником не обязательно является величина
Виновником не обязательно является величинаПускатели управления промышленными двигателями | Магнитный пускатель двигателя
Знакомство с пускателями двигателей
Пускатели двигателей являются одним из основных изобретений для управления двигателями. Как следует из названия, стартер — это электрическое устройство, которое регулирует электрическую мощность для запуска двигателя. Эти электрические устройства также используются для остановки, реверсирования и защиты электродвигателей. Ниже приведены два основных компонента стартера:
- Контактор: Основной функцией контактора является управление подачей электрического тока на двигатель. Контактор может включить или отключить питание в цепи.
- Реле перегрузки: Перегрев и потребление слишком большого тока могут привести к тому, что двигатель сгорит и станет практически бесполезным. Реле перегрузки предотвращают это и защищают двигатель от любой потенциальной опасности.

Стартер представляет собой сборку этих двух компонентов, которая позволяет включать и выключать электродвигатель или электрическое оборудование, управляемое двигателем. Стартер также обеспечивает необходимую защиту цепи от перегрузки.
Типы пускателей двигателей
Существует несколько типов пускателей двигателей. Однако двумя основными типами этих электрических устройств являются:
Ручные пускатели
Ручные пускатели — это устройства, которые приводятся в действие вручную. Эти стартеры чрезвычайно просты и просты в эксплуатации и не требуют вмешательства специалиста. На пускателе есть кнопка (или поворотная ручка), которая позволяет пользователю включать и выключать подключенное оборудование. Кнопки имеют механические связи, которые размыкают или замыкают контакты, запуская или останавливая двигатель. Следующие особенности ручного стартера делают его предпочтительным по сравнению с другими типами:
Кнопки имеют механические связи, которые размыкают или замыкают контакты, запуская или останавливая двигатель. Следующие особенности ручного стартера делают его предпочтительным по сравнению с другими типами:
- Эти стартеры обеспечивают безопасную и экономичную работу.
- Компактный размер этих устройств делает их подходящими для широкого спектра применений.
- Обеспечивают защиту двигателя от перегрузок, защищая его от возможных повреждений.
- Эти устройства поставляются с широким выбором корпусов.
- Первоначальная стоимость ручного стартера невелика.
Магнитные пускатели двигателей
Это другой основной тип пускателей двигателей. Он управляется электромагнитным способом. Это означает, что нагрузка двигателя, подключенная к пускателю двигателя, обычно запускается и останавливается при более низком и более безопасном напряжении, чем напряжение двигателя. Как и другие пускатели двигателей, магнитный пускатель также имеет электрический контактор и реле перегрузки для защиты устройства от слишком большого тока или перегрева.
Схема пускателя двигателя и работа
В пускателе двигателя есть две цепи, а именно:
- Цепь питания: Цепь питания соединяет линию с двигателем. Он обеспечивает передачу электроэнергии через контакты пускателя, реле перегрузки и далее к двигателю. Ток двигателя проходит через силовые (главные) контакты контактора.
- Цепь управления: Это другая цепь пускателя двигателя, которая управляет контактором для его включения или выключения. Главные контакты контактора отвечают за разрешение или прерывание подачи тока на двигатель. Для этого контакты в цепи управления либо размыкаются, либо замыкаются. Цепь управления подает питание на катушку контактора, которая создает электромагнитное поле. Силовые контакты притягиваются этим электромагнитным полем в замкнутое положение. Это замыкает цепь между двигателем и линией. Таким образом, дистанционные операции становятся возможными благодаря схеме управления. Цепь управления может быть подключена двумя способами:
- Метод 1: Один из наиболее широко используемых методов подключения цепи управления называется «двухпроводным методом». Тип управляющего устройства с постоянным контактом, такой как датчик присутствия, термостат или поплавковый выключатель, используется в двухпроводном методе подключения цепи управления.
- Метод 2: В отличие от двухпроводного метода, «трехпроводной метод» подключения цепи управления использует удерживающий контакт цепи и пилотные устройства с мгновенным контактом.
 Цепь управления может быть подключена двумя способами:
Цепь управления может быть подключена двумя способами:Цепь управления может получать питание одним из следующих трех способов:
- Общее управление: Этот тип управления используется, когда источник питания цепи управления такой же, как у двигателя.
- Раздельное управление: Это самый популярный тип управления. Как следует из названия, в этой схеме схема управления получает питание от отдельного источника. Как правило, полученная мощность имеет более низкое напряжение по сравнению с источником питания двигателя.
- Управление трансформатором: Как следует из названия, схема управления получает питание от трансформатора схемы управления. Как правило, полученная мощность имеет более низкое напряжение по сравнению с источником питания двигателя.
 Как правило, полученная мощность имеет более низкое напряжение по сравнению с источником питания двигателя.
Как правило, полученная мощность имеет более низкое напряжение по сравнению с источником питания двигателя.Типы магнитных пускателей двигателей
В зависимости от того, как они подключены в цепь, существует много типов магнитных пускателей двигателей, например:
1. Пускатель прямого пуска Онлайн-стартер — простейшая форма пускателя двигателя, кроме ручного пускателя. Контроллер этого пускателя обычно представляет собой простую кнопку (но может быть селекторным переключателем, концевым выключателем, поплавковым выключателем и т. д.). Нажатие кнопки пуска замыкает контактор (путем подачи питания на катушку контактора), подключенный к основному источнику питания и двигателю. Это обеспечивает ток питания двигателя. Для выключения двигателя предусмотрена кнопка остановки. Для защиты от перегрузки по току цепь управления подключается через нормально замкнутый вспомогательный контакт реле перегрузки. При срабатывании реле перегрузки нормально замкнутый вспомогательный контакт размыкается и обесточивает катушку контактора, а главные контакты контактора размыкаются.
Это обеспечивает ток питания двигателя. Для выключения двигателя предусмотрена кнопка остановки. Для защиты от перегрузки по току цепь управления подключается через нормально замкнутый вспомогательный контакт реле перегрузки. При срабатывании реле перегрузки нормально замкнутый вспомогательный контакт размыкается и обесточивает катушку контактора, а главные контакты контактора размыкаются.
Преимущества использования пускателей двигателей прямого пуска:
- Они имеют компактную конструкцию.
- Они экономичны.
- Они имеют простую конструкцию.
2. Пускатель сопротивления ротора
В пускателе сопротивления ротора три сопротивления соединены последовательно с обмотками ротора. Это помогает значительно снизить ток ротора, а также увеличить крутящий момент двигателя.
Преимущества использования пускателей электродвигателей сопротивления ротора:
- Они экономичны.
- У них простой метод контроля скорости.
- Они обеспечивают низкий пусковой ток, большой пусковой момент и большой пусковой момент.

3. Пускатель сопротивления статора
Пускатель сопротивления статора состоит из трех резисторов, которые соединены последовательно с каждой фазой обмоток статора. На каждом резисторе возникает падение напряжения, поэтому возникает необходимость подавать низкое напряжение на каждую фазу. Эти сопротивления устанавливаются в начальное или максимальное положение на этапе пуска двигателя. Пусковой ток в этом типе пускателя поддерживается на минимальном уровне. Кроме того, необходимо поддерживать пусковой момент двигателя.
Преимущества использования пускателей электродвигателей сопротивления статора:
- Они подходят для использования в устройствах управления скоростью.
- Обладают чрезвычайно гибкими пусковыми характеристиками.
- Обеспечивают плавное ускорение.

4. Автотрансформаторный пускатель
В автотрансформаторном пускателе трансформатор подает определенный процент первичного напряжения на вторичную обмотку трансформатора. Автотрансформатор подключен по схеме звезда. Три вторичные катушки трансформатора с ответвлениями подключены к трем фазам двигателя в этом типе пускателя. Это помогает снизить напряжение, подаваемое на клеммы двигателя.
Преимущества использования автотрансформаторных пускателей двигателей:
- Их можно использовать для ручного управления скоростью, но с ограниченными возможностями.
- Обладают чрезвычайно гибкими пусковыми характеристиками.
- Имеют высокий выходной крутящий момент.
5.
Пускатель звезда-треугольник
По сравнению с другими типами пускателей, пускатель звезда-треугольник используется в больших масштабах. Как следует из названия, три обмотки соединены по схеме «звезда» в пускателях «звезда-треугольник». Определенное время задается таймером или любой другой схемой контроллера. По истечении этого времени обмотки соединяются треугольником. Фазное напряжение при соединении звездой снижается до 58 %, а общий потребляемый ток составляет 58 % от нормального тока. Это приводит к снижению крутящего момента.
Определенное время задается таймером или любой другой схемой контроллера. По истечении этого времени обмотки соединяются треугольником. Фазное напряжение при соединении звездой снижается до 58 %, а общий потребляемый ток составляет 58 % от нормального тока. Это приводит к снижению крутящего момента.
Преимущества использования пускателей двигателей звезда-треугольник:
- Они идеально подходят для длительного времени разгона.
- Имеют меньший входной импульсный ток по сравнению с другими пускателями.
- Имеют более простую конструкцию по сравнению с другими стартерами.
Особенности пускателей двигателей
Сегодня пускатели двигателей широко используются благодаря перечню их полезных свойств. Ниже приведены некоторые особенности этих очень полезных электрических устройств:
- Облегчают запуск и останов двигателя.
- Пускатели рассчитаны по мощности (лошадиные силы, киловатты) и току (амперы).
- Обеспечивают необходимую защиту двигателя от перегрузки.
- Электрическое устройство обеспечивает дистанционное управление включением/выключением.
- Эти устройства позволяют быстро включать и отключать ток (подключение и толчковый режим).
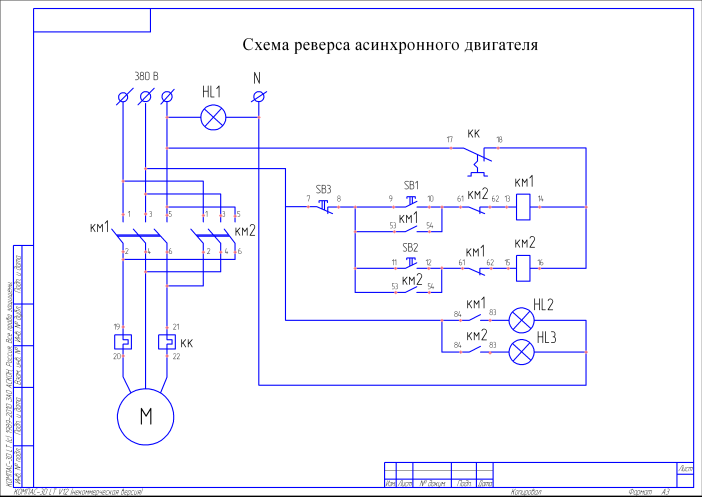
Основные функции пускателей двигателей
Ниже перечислены основные функции, которые должен выполнять пускатель:
- Управление: Функция управления в основном выполняется компонентом контактора пускателя. Он контролирует размыкание и замыкание силовой электрической цепи. Переключение осуществляется главными контактами (полюсами) контактора. На электромагнитную катушку подается напряжение, которое размыкает или замыкает контакты. Эта электромагнитная катушка имеет номинальное управляющее напряжение и может быть напряжением переменного или постоянного тока.
- Защита от короткого замыкания: В промышленных применениях нормальный ток нагрузки может достигать тысяч ампер. В случае короткого замыкания ток короткого замыкания может превышать 100 000 ампер. Это может привести к серьезному повреждению оборудования. Защита от короткого замыкания отключает питание и предотвращает возможные повреждения безопасным образом. Защита от короткого замыкания обеспечивается предохранителями или автоматическими выключателями в комбинированном контроллере двигателя.
- Защита от перегрузки: Когда двигатель потребляет больше тока, чем он рассчитан, возникает состояние перегрузки. Основной задачей реле перегрузки является обнаружение избыточных токов. При обнаружении перегрузки вспомогательный контакт реле перегрузки размыкает цепь и предотвращает перегорание или перегрев двигателя. Электронные или электромеханические реле перегрузки используются в сочетании с контактором для обеспечения необходимой защиты от перегрузки.
- Отключение и прерывание: Во избежание непреднамеренного перезапуска необходимо отключить двигатель от основной цепи питания. Чтобы безопасно выполнять техническое обслуживание двигателя или пускателя, двигатель должен иметь возможность отключаться и быть изолированным от источника питания. Эту функцию выполняет выключатель цепи. Отключение и размыкание обеспечивается разъединителем или автоматическим выключателем в комбинированном контроллере двигателя (или может быть установлен удаленно от пускателя).
 В случае короткого замыкания ток короткого замыкания может превышать 100 000 ампер. Это может привести к серьезному повреждению оборудования. Защита от короткого замыкания отключает питание и предотвращает возможные повреждения безопасным образом. Защита от короткого замыкания обеспечивается предохранителями или автоматическими выключателями в комбинированном контроллере двигателя.
В случае короткого замыкания ток короткого замыкания может превышать 100 000 ампер. Это может привести к серьезному повреждению оборудования. Защита от короткого замыкания отключает питание и предотвращает возможные повреждения безопасным образом. Защита от короткого замыкания обеспечивается предохранителями или автоматическими выключателями в комбинированном контроллере двигателя.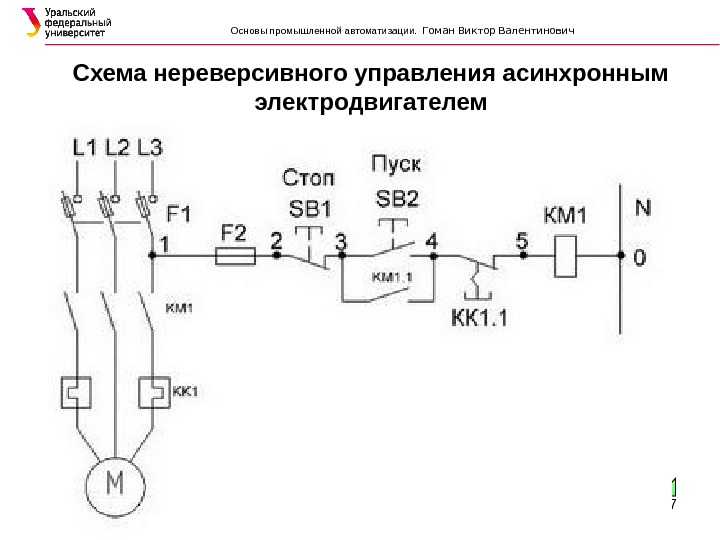 Чтобы безопасно выполнять техническое обслуживание двигателя или пускателя, двигатель должен иметь возможность отключаться и быть изолированным от источника питания. Эту функцию выполняет выключатель цепи. Отключение и размыкание обеспечивается разъединителем или автоматическим выключателем в комбинированном контроллере двигателя (или может быть установлен удаленно от пускателя).
Чтобы безопасно выполнять техническое обслуживание двигателя или пускателя, двигатель должен иметь возможность отключаться и быть изолированным от источника питания. Эту функцию выполняет выключатель цепи. Отключение и размыкание обеспечивается разъединителем или автоматическим выключателем в комбинированном контроллере двигателя (или может быть установлен удаленно от пускателя).Стандарты и характеристики
На номинальные характеристики пускателя двигателя влияет множество факторов, таких как тепловой ток, постоянный ток, напряжение двигателя и мощность.
Тепловой ток зависит от теплопроводности (k), которая является свойством, указывающим на способность материала проводить тепло. Это означает, что тепловой ток прямо пропорционален теплопроводности.
Непрерывный ток, который также обычно называют непрерывным амперным номиналом, является мерой способности пускателя управления двигателем выдерживать ток в течение непрерывного времени.
Номинальная мощность пускателя двигателя зависит от типа используемого двигателя. Пускатели двигателей постоянного тока имеют рейтинг мощности постоянного тока в лошадиных силах. С другой стороны, пускатели двигателей переменного тока имеют номинальную мощность однофазной и трехфазной мощности.
Мощность пускателя двигателя зависит от размера и типа нагрузки, для которой он был разработан. Стартеры соответствуют стандартам и рейтингам Underwriters Laboratories (UL), Канадской ассоциации стандартов (CSA), Международной электротехнической комиссии (IEC) и Национальной ассоциации производителей электрооборудования (NEMA).
Рейтинг NEMA
Рейтинг NEMA стартера во многом зависит от максимальной мощности, указанной в стандарте ISCS2 Национальной ассоциации производителей электрооборудования. Выбор пускателей NEMA осуществляется на основе их типоразмера NEMA, который варьируется от размера 00 до размера 9. и от приложений к приложениям для подключения и бега, которые более требовательны. При выборе подходящего пускателя двигателя NEMA необходимо знать напряжение и мощность двигателя. В случае значительного количества подключений и толчков, потребуется снижение номинальных характеристик устройства с рейтингом NEMA.
При выборе подходящего пускателя двигателя NEMA необходимо знать напряжение и мощность двигателя. В случае значительного количества подключений и толчков, потребуется снижение номинальных характеристик устройства с рейтингом NEMA.
Рейтинг IEC
Международная электротехническая комиссия (IEC) определила рабочие и рабочие характеристики для устройств IEC в публикации IEC 60947. Стандартные размеры не указаны IEC. Типичный рабочий цикл устройств IEC определяется категориями использования. Что касается обычных приложений для пуска двигателей, AC3 и AC4 являются наиболее распространенными категориями использования.
В отличие от типоразмеров NEMA, они обычно оцениваются по максимальному рабочему току, тепловому току, номинальной мощности в л.с. и/или кВт.
Существуют и другие параметры, которые важно учитывать при выборе пускателя электродвигателя, такие как ускорение с ограничением по времени, ускорение линии тока, управляющее напряжение, количество полюсов и рабочая температура. Мы рассмотрим их в будущем техническом документе.
Мы рассмотрим их в будущем техническом документе.
Мы надеемся, что этот краткий информационный документ дал вам хорошее базовое представление о пускателях двигателей. Ищите другие документы от c3controls на c3controls.com/blog.
Отказ от ответственности:
Содержимое, представленное в этом техническом документе, предназначено исключительно для общих информационных целей и предоставляется с пониманием того, что авторы и издатели не занимаются предоставлением инженерных или других профессиональных консультаций или услуг. Практика проектирования определяется конкретными обстоятельствами, уникальными для каждого проекта. Следовательно, любое использование этой информации должно осуществляться только после консультации с квалифицированным и лицензированным специалистом, который может учесть все соответствующие факторы и желаемые результаты. Информация в этом техническом документе была размещена с разумной тщательностью и вниманием. Однако некоторая информация в этих официальных документах может быть неполной, неверной или неприменимой к конкретным обстоятельствам или условиям. Мы не несем ответственности за прямые или косвенные убытки, возникшие в результате использования, доверия или действий на основании информации, содержащейся в этом техническом документе.
Мы не несем ответственности за прямые или косвенные убытки, возникшие в результате использования, доверия или действий на основании информации, содержащейся в этом техническом документе.
Последовательное управление двумя двигателями после временной задержки
Эта статья посвящена последовательному управлению двумя двигателями. Целью последовательного управления является поддержание заданного порядка, при котором двигатели принудительно останавливаются или запускаются.
В настоящее время в большинстве приложений для работы используются два двигателя. Но самое главное, их не нужно активировать одновременно, Моторы должны запускаться через какой-то интервал. последовательное управление после некоторой задержки. Итак, этот последовательный контроль вступает в действие.
В этом последовательном управлении мы используем таймер задержки включения. Таймер осуществляет управление автоматически без какой-либо ручной помощи. Это экономит Ручное управление, а управление по таймеру является одним из лучших и простых методов автоматического последовательного управления.
Компоненты
- Миниатюрный автоматический выключатель (MCB)
- Контактор
- Таймер
- Кнопки пуска и останова
- Мультиметр
- Токоизмерительные клещи
Схемы цепей
Последовательное управление двигателями имеет две цепи. Это:
- Цепь питания
- Цепь управления
Цепь питания
Цепь управления
Эксплуатация
Трехфазное питание 440 В подается на 3-полюсный автоматический выключатель.
MCB Защищает от сверхтоков/неравномерного напряжения, которые воздействуют на цепь или компоненты.
3-полюсный автоматический выключатель предназначен для переноса питания после включения.
Далее на цепь управления подается питание 240 В. Причина использования однофазного питания (240 В) в цепи управления заключается в том, что все элементы управления рассчитаны на 240 В.
Здесь эти 240 В проходят через эту цепь, проходя через кнопку СТОП.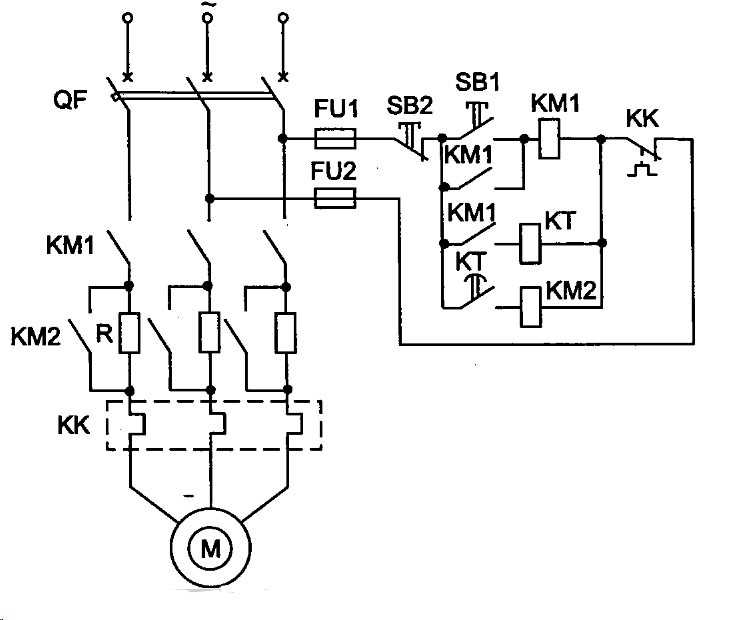 После нажатия кнопки СТАРТ питание поступает на катушку контактора 1 и катушку таймера.
После нажатия кнопки СТАРТ питание поступает на катушку контактора 1 и катушку таймера.
Теперь контактор 1 и таймер включены. Кроме того, удерживающий контакт для контактора 1 (замыкающий контакт) подается параллельно пусковому источнику питания, поскольку обмотка контактора 1 и катушка таймера должны быть запитаны после отпускания кнопки ПУСК.
Таким образом, на катушку контактора 1 подается питание в цепи управления, что приводит к замыканию контактора 1.
Теперь контактор 1 был активирован, и питание от 3-полюсного MCB поступает на активированный контактор 1, и теперь двигатель 1 начинает вращаться.
Здесь двигатель запускается с помощью кнопки «Пуск» в цепи управления.
Сейчас работает двигатель 1, а через несколько секунд запустится двигатель 2. Мотор 2 управлялся таймером. Сначала катушка контактора 1 и катушка таймера были под напряжением.
В таймере начался отсчет секунд (времени) после подачи питания на катушку таймера. Мы устанавливаем предварительно установленное время, как нам нужно в приложении.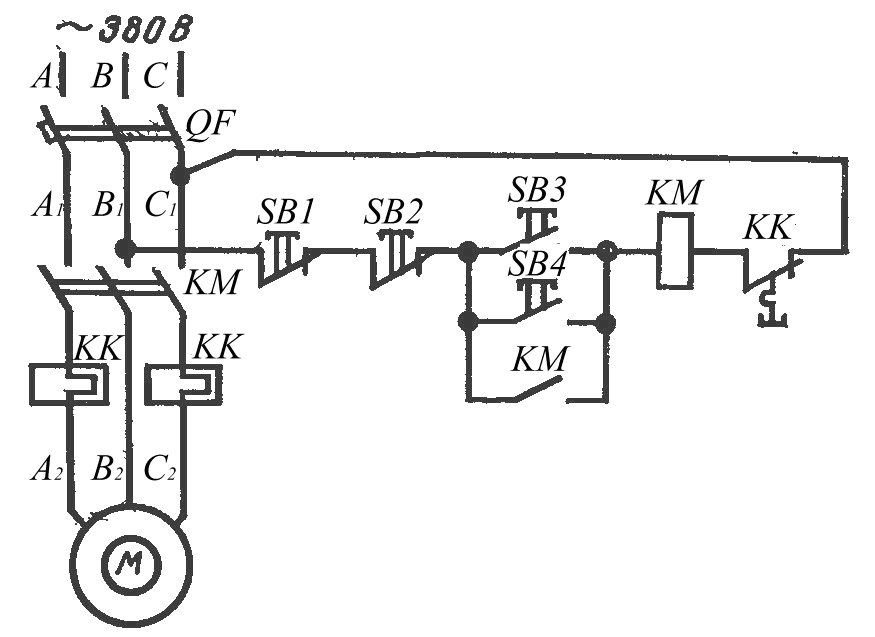
После того, как фактическое время совпадет с предварительно установленным временем в таймере, на катушку контактора 2 подается питание.
Нормально разомкнутый контакт таймера замыкается после фактического времени подачи питания на катушку контактора 2.
Подача питания на катушку контактора 2 приводит к замыканию контактора 2. Трехфазное питание от 3-полюсного MCB проходит через контактор 2, заставляя двигатель 2 вращаться.
Теперь, после некоторой задержки, двигатель 2 также начинает вращаться.
Таким образом, два двигателя запустились последовательно через определенное время, установленное на таймере.
Мы также можем измерять напряжение и ток во время процесса. Здесь мы используем мультиметр для измерения напряжения.
В мультиметре мы можем измерять многие параметры, такие как переменное напряжение и ток, постоянное напряжение и ток, сопротивление, непрерывность и тому подобное.
Теперь мы измеряем напряжение переменного тока.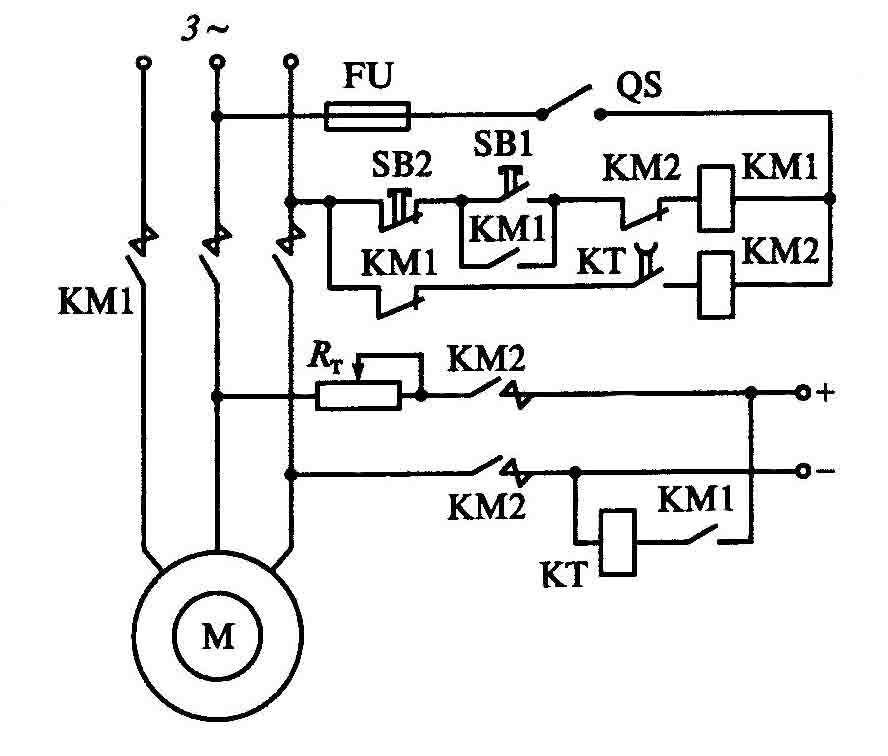 Выберите опцию V~ в мультиметре. Для измерения напряжения поместите два щупа мультиметра в любые две линии, такие как L1, L2 или L2, L3 или L1, L3. Все показывают только одни и те же значения.
Выберите опцию V~ в мультиметре. Для измерения напряжения поместите два щупа мультиметра в любые две линии, такие как L1, L2 или L2, L3 или L1, L3. Все показывают только одни и те же значения.
Здесь два щупа помещаются в L1 и L2, и измеренные напряжения отображаются на дисплее.
Для измерения тока мы использовали токоизмерительные клещи. Функция токоизмерительных клещей аналогична только мультиметру.
Мы можем измерять переменный ток и напряжение, постоянный ток и напряжение, сопротивление и непрерывность. Специальная функция этого счетчика заключается в том, что он имеет трансформатор тока с разъемным сердечником (кольцевые плоскогубцы), с помощью которого мы можем измерять переменный ток, не прерывая цепь.
Измеряя ток, мы хотим поместить клещи в любой из проводников L1, L2 или L3 в опции A~ в токоизмерительных клещах. Здесь мы использовали L2, измеренный ток отображался на дисплее.
Примечание. Эти клещи должны работать только с нагрузкой. Работа на холостом ходу здесь запрещена
Для остановки процесса нажимается кнопка Стоп.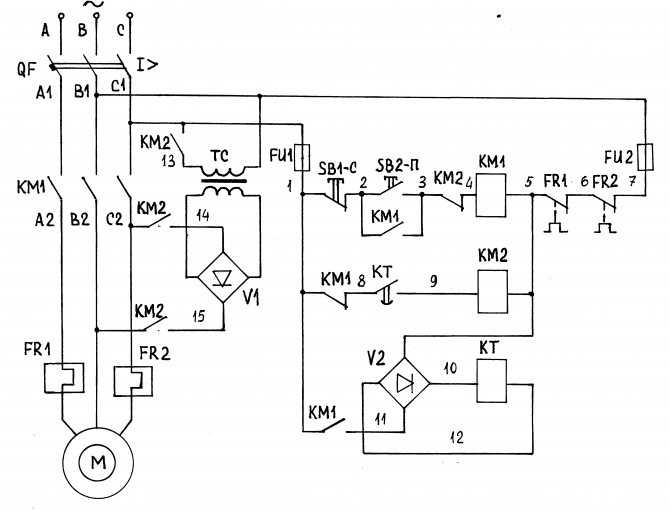 Это обесточивает катушку контактора 1, катушку контактора 2 и катушку таймера.
Это обесточивает катушку контактора 1, катушку контактора 2 и катушку таймера.
Из-за обесточивания катушки контактора 1 и катушки контактора 2 контактор 1 и контактор размыкаются, и подача питания на двигатель 1 и двигатель 2 прекращается.
Наконец, оба мотора медленно остановились.
Применение
- В промышленности Смешивание двух компонентов или продуктов в резервуаре
- В сельском хозяйстве Автоматическое орошение полей.
- В машиностроении для выполнения различных операций одна за другой
Если вам понравилась эта статья, подпишитесь на наш канал YouTube для видеоуроков по КИПиА, электрике, ПЛК и SCADA.
Вы также можете подписаться на нас в Facebook и Twitter, чтобы получать ежедневные обновления.
Читать далее:
Будьте первым, кто получит эксклюзивный контент прямо на вашу электронную почту.
Обещаем не спамить. Вы можете отписаться в любое время.
Недействительный адрес электронной почты
2113 — Регулятор скорости для трехфазных асинхронных двигателей
2113 — Регулятор скорости для трехфазных асинхронных двигателей — д-р Годфрид-Виллем Раес
Доктор Годфрид-Виллем RAES
Курс экспериментальной музыки : Boekdeel
2: Живая электроника
Hogeschool Gent: Департамент музыки и драмы
| <Теруг Наар Инхудстафель Курсус> | ДВИГАТЕЛИ | Дит Хоофдстукье это niet beschikbaar в Нидерландах.  |
2113:
см. также: 2117
Заявка
<Управление скоростью трехфазных асинхронных двигателей>
Скорость обычного трехфазного асинхронного двигателя зависит от частоты
напряжения питания. Изменение скорости такого двигателя, следовательно, требует создания
3-х фазный преобразователь частоты. Драйвер может быть реализован с помощью мощности
МОП-транзисторы (или IGTB), способные работать с высокими напряжениями и высокими скоростями переключения.
Генерируемая частота может быть запрограммирована в небольшом PIC-контроллере и даже
в быстрой базовой печати.
Обратите внимание, что при более низких частотах, чем обычно, напряжение должно быть уменьшено.
пропорционально. Если вы забудете об этом, двигатель может перегреться и даже
Выгореть. (См. примечание внизу этого абзаца). Схемы, показанные здесь
служат чисто образовательным целям (хотя и работают!) и не всегда
самое подходящее и самое безопасное решение.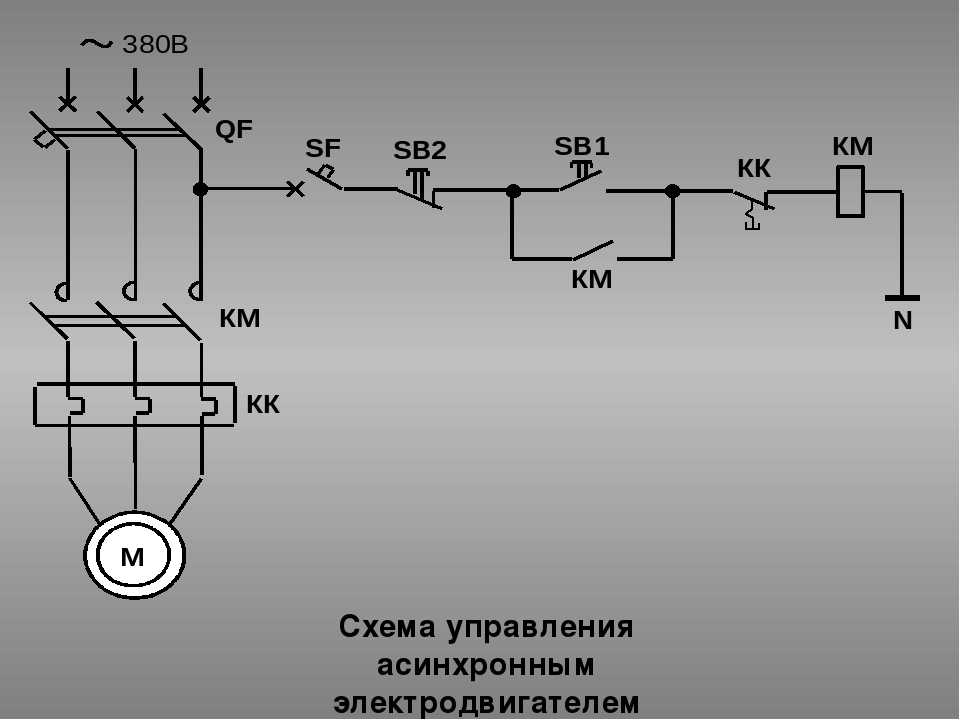
Для биполярной схемы привода, показанной ниже, двигатель должен быть соединен треугольником.
Используемые оптопары могут быть либо TIL111, либо CNY17-2. Не пытайтесь сэкономить на
трансформаторы: это очень маленькие и дешевые типы (достаточно 2 ВА) и
Плавающий способ их подключения здесь (без заземленных отрицательных полюсов!)
к этому дизайну. Будьте осторожны, играя с такой схемой,
так как везде высокое напряжение. Цифровой вход и микроконтроллер
полностью и оптически изолированы от силовой цепи.
Битовая комбинация, которая должна быть запрограммирована в программном обеспечении контроллера, может выглядеть так:
Обратите внимание на фазовый сдвиг на 120 градусов. Шаблон был разработан, чтобы генерировать много
искажения третьей гармоники на результирующей волне, что увеличивает среднеквадратичное значение
напряжение на обмотках двигателя.
Если вы хотите, чтобы двигатель был подключен Y-образно, проблема будет заключаться в том, что вам нужно
гораздо более высокое напряжение для работы. Используя трехфазный выпрямительный мост, вы можете
Используя трехфазный выпрямительный мост, вы можете
конечно использовать выпрямленный 3-х фазный сетевой ток, но это предполагает его наличие.
В качестве альтернативы можно использовать изолирующий трансформатор 230В/400В. Однако,
в конце концов, это будет иметь тенденцию быть более дорогим, чем схема, приведенная выше.
Однако приведенная ниже схема станет намного проще, так как нам не требуется
6 мосфетов и без плавающих источников питания:
приложений:
- изменение/регулировка давления ветра в продуваемых органах.
- Контроллеры двигателей для токарных станков, больших пил и т. д.
- Генератор трехфазного тока
- Бесщеточные электроприводы постоянного тока
ПРИМЕЧАНИЕ:
Если вам нужен контроллер для трехфазного двигателя, вы всегда должны учитывать
используя один из многих модулей, которые сегодня предлагает индустрия. Заводы такие
как Lust gmbh, Siemens (Micromaster 410), Toshiba, Hitachi.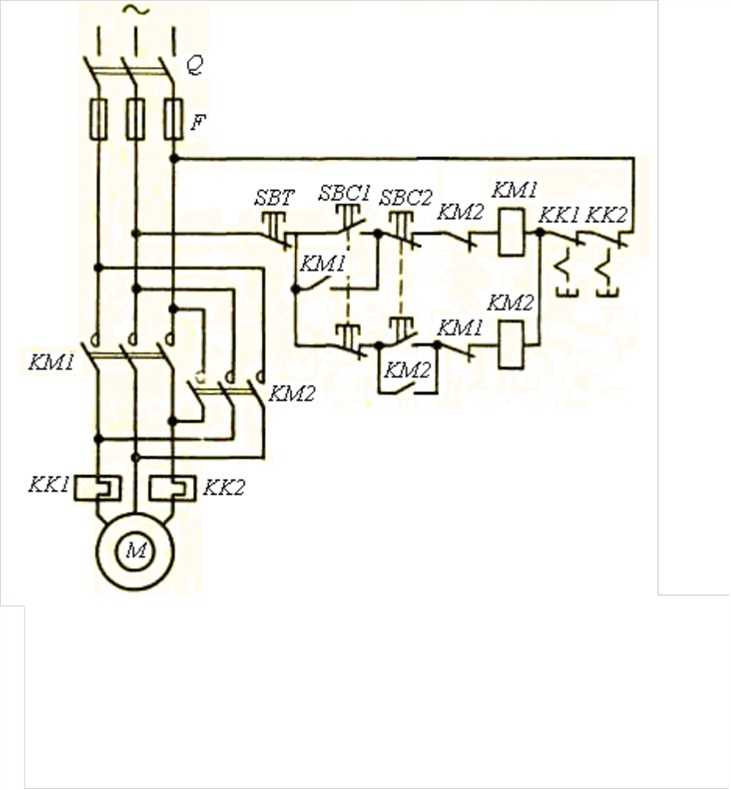 .. у всех есть контроль
.. у всех есть контроль
модули в своих каталогах. Управление скоростью двигателя с помощью такого
Стандартное решение можно выполнить, отправив аналоговое напряжение (0-10 В в большинстве случаев).
время) на соответствующий вход или, в некоторых моделях, путем отправки команд RS232
в их порт. Преимущество этих модулей, среди прочего, в том, что
одновременно они служат защитой двигателя. Кроме того, это может быть в конце
будет дешевле, чем строить схемы, показанные выше, самостоятельно.
Цены варьируются от 300 до 600 евро, в зависимости от требуемой мощности и функций.
Для очень специфических типов двигателей может быть полезно разработать
контроллер двигателя. Это то, что мы сделали для нашего робота
двигатель 400 Гц / 200 В использовался для привода штормового механизма с небольшим
радиальный компрессор. Это общие спецификации для двигателей, предназначенных для работы
на самолетах. Контроллер использует 16-битный микропроцессор PIC (тип 24EP128MO202),
поскольку этот тип имеет 3 независимых выхода ШИМ (даже 6 выходов, в комплементарных
Режим).