Содержание
Схемы регулировки оборотов двигателя постоянного тока
На рисунке показана схема регулятора оборотов двигателя постоянного тока на напряжение 12В. Регулировка оборотов двигателя производится потенциометром VR1. Для отправки комментария вам необходимо авторизоваться. Ваш IP:
Поиск данных по Вашему запросу:
Схемы регулировки оборотов двигателя постоянного тока
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Как сделать регулятор оборотов электродвигателя 12в, 220в, 24в
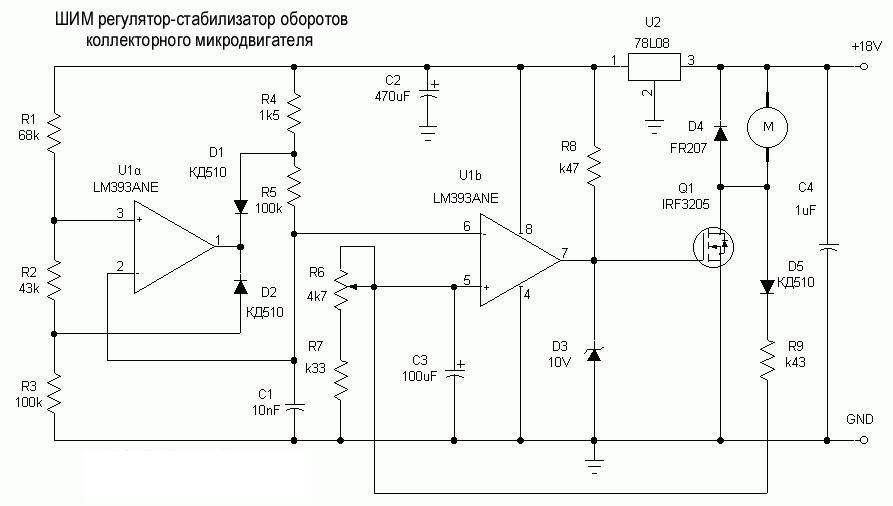
- Регулятор оборотов коллекторного двигателя без потерь
- СХЕМА РЕГУЛЯТОРА ОБОРОТОВ ДВИГАТЕЛЯ
- Плавная регулировка оборотов электродвигателя 220в переменного тока
- Регулятор оборотов коллекторного двигателя: устройство и изготовление своими руками
- Подборка схем регулятора оборотов двигателя постоянного тока
- Регулятор оборотов с поддержанием мощности своими руками
- Схемы и обзор регуляторов оборотов электродвигателя 220В
- блок управления коллекторным двигателем постоянного тока.
- Простой регулятор скорости вентилятора (12В). Регулятор мощности постоянного тока 12 вольт

ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Регулятор оборотов двигателя отопителя.
Как сделать регулятор оборотов электродвигателя 12в, 220в, 24в
На рисунке показана схема регулятора оборотов двигателя постоянного тока на напряжение 12В. Регулировка оборотов двигателя производится потенциометром VR1. Для отправки комментария вам необходимо авторизоваться. Ваш IP: Регулятор оборотов двигателя постоянного тока 12В. Разное ИП Регулятор оборотов двигателя 12В — Регулятор оборотов двигателя выполнен на таймере NE, который используется как ШИМ-регулятор, представляющий собой простой генератор импульсов.
Цифровой счетчик оборотов двигателя для автомобиля — Счетчик оборотов двигателя скорости вращения коленчатого вала можно использовать в автомобилях с 4-, 6- или 8-цилиндровым двигателем.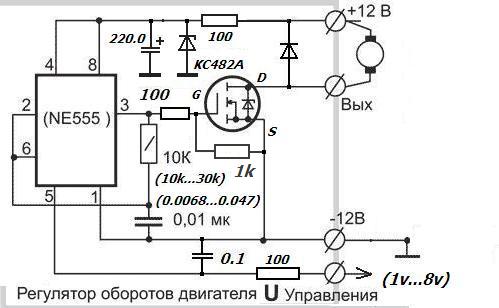
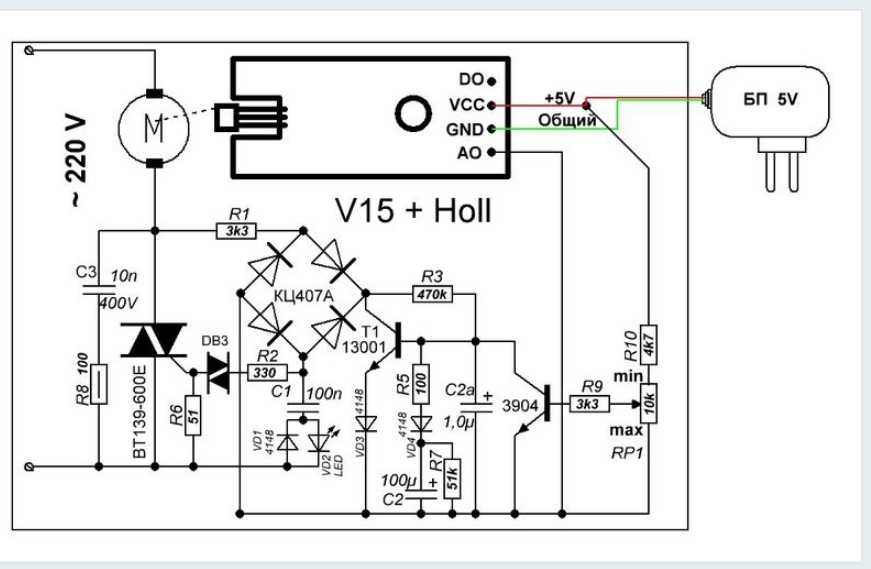
Самый мощный двигатель на планете — Самый мощный двигатель на планете Самый мощный двигатель на планете — Wartsila-Sulzer RTAC и является самым мощным дизельным двигателем на планете. Двухтактный турбированный дизельный двигатель является самым мощным и самым эффективным силовым агрегатом в мире, разработан для судов Регулятор оборотов электрического двигателя — Регулятор оборотов выполнен на специализированной микросхеме U, она имеет модуль мягкого старта управления двигателя, блок контроля потребляемого тока нагрузкой и стабилизатор оборотов двигателя.
Как показано на схеме Р1 выполняет роль регулятора мощности, а Р2 регулятора скорости вращения Регулятор оборотов двигателя 12В — Эта схема может быть использована в качестве регулятора скорости оборотов 12В-двигателя. Номинальный ток нагрузки до 5A непрерывный , схема может быть использована как регулятор яркости галогенных ламп мощность до 50 Вт. В схеме использован таймер для генерации импульсов Гц с Добавить комментарий Отменить ответ Для отправки комментария вам необходимо авторизоваться.
Войти с помощью:. Микросхема TAAP имеет низкий уровень искажений, защита от короткого замыкания, теплозащиту и т. Этот усилитель работает при напряжении от 8 до 12В. На рисунке показана схема регулятора оборотов электроинструмента. При работе с электроинструментом желательно иметь возможность плавно изменять его обороты, но простое снижение напряжения приводит к снижению оборотов и так же к потери мощности, предложенная схема лишена этого недостатка, так как в ней используется регулирование с обратной связью по току двигателя, в … Подробнее Предложенный вариант измерителя RCL достаточно прост и прост в обращении, хотя он и не обладает большой точностью измерения но тем не менее поваляет оперативно определить емкость, сопротивление и индуктивность элемента.
Ток в цепи с конденсатором может протекать лишь при изменении приложенного к ней напряжения, причем сила тока, протекающего по цепи при заряде и разряде конденсатора, будет тем больше, чем больше емкость конденсатора и чем быстрее происходят изменения ЭДС. Конденсатор, включенный в цепь переменного тока, влияет на силу протекающего по цепи … Подробнее Применение источника тока уменьшает нелинейные искажения. Усиление … Подробнее Новые статьи Усилитель для наушников Выходная мощность усилителя мВт на нагрузке … Подробнее На рисунке показана схема простого, но достаточно качественного усилителя класса А, с максимальной выходной мощностью 7 Вт на нагрузке 8 … Подробнее ESR — Equivalent Series Resistance — параметр конденсатора, который показывает активные потери в цепи переменного тока.
Конденсатор, включенный в цепь переменного тока, влияет на силу протекающего по цепи … Подробнее Применение источника тока уменьшает нелинейные искажения. Усиление … Подробнее Новые статьи Усилитель для наушников Выходная мощность усилителя мВт на нагрузке … Подробнее На рисунке показана схема простого, но достаточно качественного усилителя класса А, с максимальной выходной мощностью 7 Вт на нагрузке 8 … Подробнее ESR — Equivalent Series Resistance — параметр конденсатора, который показывает активные потери в цепи переменного тока.
В эквиваленте его можно … Подробнее Панель управления сайтом Регистрация Войти. Новые комментарии Vijay Prabhu к записи Темброблок 5.
Регулятор оборотов коллекторного двигателя без потерь
Стабильность напряжения — это весьма важная характеристика электропитания для большинства электронных устройств. В них содержатся электрические цепи с нелинейными элементами. Для оптимальной настройки этих цепей существует определенная величина разности потенциалов.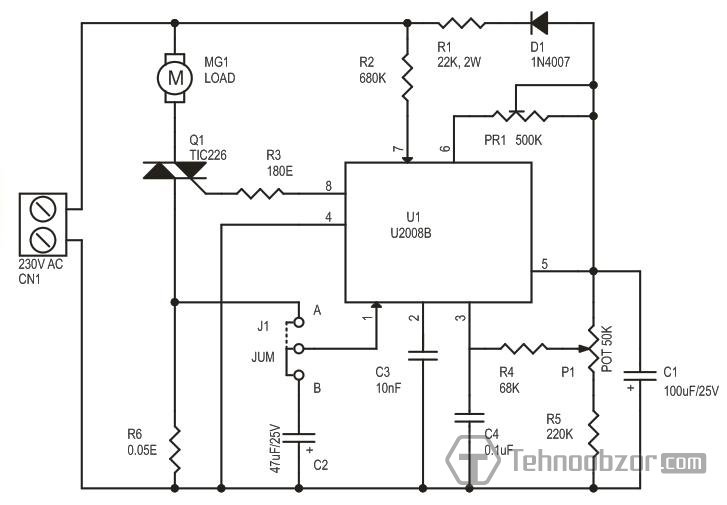 И если она будет изменяться, электрическая цепь утратит правильные эксплуатационные характеристики. Поскольку напряжение 12 вольт является стандартом не только для автомобилей, но и для многих других устройств, далее пойдет речь именно о таких регуляторах.
И если она будет изменяться, электрическая цепь утратит правильные эксплуатационные характеристики. Поскольку напряжение 12 вольт является стандартом не только для автомобилей, но и для многих других устройств, далее пойдет речь именно о таких регуляторах.
Фото — регулятор оборотов двигателя постоянного тока. Зачем нужен Фото — схема регулятора для коллекторного двигателя. В зависимости от.
СХЕМА РЕГУЛЯТОРА ОБОРОТОВ ДВИГАТЕЛЯ
Приложение к статье : Важнейший станок «деревянного» моделиста. Прежде всего — для чего это нужно. Почти у каждого моделиста имеется самодельный или промышленный электроинструмент с приводом от коллекторного двигателя постоянного тока. При этом обычно такой инструмент не имеет регулятора оборотов или имеется простейшая ступенчатая регулировка. Не буду лишний раз доказывать, что наличие регулятора оборотов в электроинструменте позволяет оптимально подобрать режим для каждой операции, особенно при использовании различных насадок. Кроме того, моделисты часто используют низковольтные нагреватели — паяльники, приспособления для гибки деревянных реек и т. При этом с помощью регулятора можно получить оптимальную температуру нагревателя. Моделисту иногда приходится наносить гальванические покрытия, для чего необходим регулируемый источник постоянного тока. Все эти функции способно выполнить устройство, описанное ниже. При конструировании бормашины встал вопрос о выборе схемы регулятора оборотов.
При этом с помощью регулятора можно получить оптимальную температуру нагревателя. Моделисту иногда приходится наносить гальванические покрытия, для чего необходим регулируемый источник постоянного тока. Все эти функции способно выполнить устройство, описанное ниже. При конструировании бормашины встал вопрос о выборе схемы регулятора оборотов.
Плавная регулировка оборотов электродвигателя 220в переменного тока
В любом современном электроинструменте или бытовом приборе используется коллекторный двигатель. Это связано с их универсальностью, т. Ещё одно преимущество заключается эффективном пусковом моменте. Однако высокая частота оборотов коллекторного двигателя устраивает далеко не всех пользователей. Для плавности пуска и возможности менять частоту вращений был изобретён регулятор , который вполне возможно изготовить своими руками.
Такой ШИМ регулятор может быть применен для управления мощными нагрузками , в том числе и низковольтными электродвигателями. Сегодня постараюсь сделать небольшой поверхностный обзор этого чудо-модуля и показать основные части и принцип работы.
Регулятор оборотов коллекторного двигателя: устройство и изготовление своими руками
Не каждая современная дрель или болгарка оснащена заводским регулятором оборотов, и чаще всего регулировка оборотов не предусмотрена вовсе. Тем не менее, как болгарки, так и дрели построены на базе коллекторных двигателей, что позволяет каждому их владельцу, маломальски умеющему обращаться с паяльником, изготовить собственный регулятор оборотов из доступных электронных компонентов, хоть из отечественных, хоть из импортных. В данной статье мы рассмотрим схему и принцип работы простейшего регулятора оборотов двигателя электроинструмента, и единственное условие — двигатель должен быть коллекторным — с характерными ламелями на роторе и щетками которые порой искрят. Приведенная схема содержит минимум деталей, и подойдет для электроинструмента мощностью до 1,8 кВт и выше, для дрели или болгарки. Похожая схема используется для регулировки оборотов в автоматических стиральных машинах, в которых стоят коллекторные высокоскоростные двигатели, а также в диммерах для ламп накаливания.
Подборка схем регулятора оборотов двигателя постоянного тока
Для 12В не проверял но думаю подойдёт! Для дополнительной безопасности можно подключить диод КД например анодом к земле катодом к коллектору VT2. Перепроверял несколько раз схема собрана правильно. Наверно поэтому так получается. Я думаю что понял что такое «free load» в даташите это наверно означает режим без нагрузки на валу. Конденсатор С1 влияет на частоту импульсов?
Он позволяет без искажений регулировать переменное напряжение. .. Регулятор оборотов электродвигателя постоянного тока 12В: схема своими.
Регулятор оборотов с поддержанием мощности своими руками
Схемы регулировки оборотов двигателя постоянного тока
Плавная работа двигателя, без рывков и скачков мощности — это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат. Регулятор оборотов двигателя, частотный преобразователь — это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ.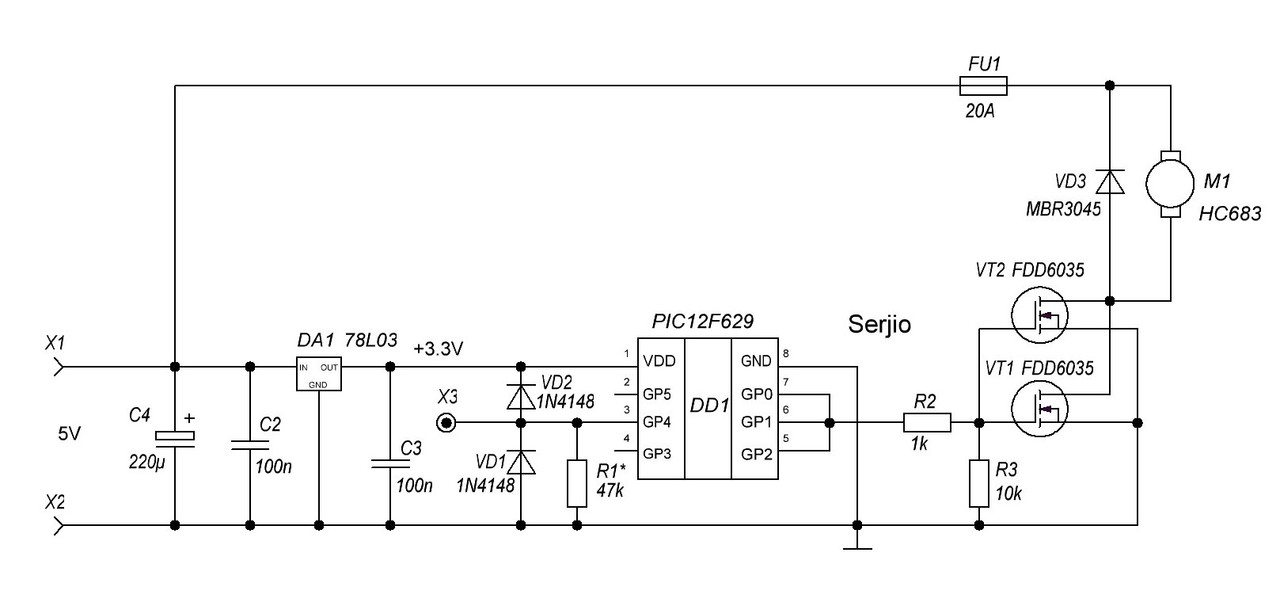
Схемы и обзор регуляторов оборотов электродвигателя 220В
Регулирование оборотов двигателя постоянного тока. Регулирование оборотов двигателя постоянного тока может осуществляться изменением напряжения подаваемого на электродвигатель. Изменение этого напряжения можно осуществлять используя делитель с изменяемым коэффициентом деления но в мощных схемах это будет приводить к большим потерям энергии. Также для регулирования оборотов можно изменять ток протекающий по цепи с двигателем путём изменения сопротивления этой цепи что в свою очередь будет вызывать большие потери на элементе сопротивление которого изменяется для регулирования тока, особенно если регулирование будет осуществляться в широких пределах. Схемы построенные на ключевых элементах которые находятся либо в открытом либо в закрытом состояниях, как правило, имеют больший КПД.
Стабильная эксплуатация, отсутствие перебоев напряжения, долгий срок службы — преимущества использования регулятора оборотов двигателя на , 12 и 24 вольт. Функция регулятора в инвертировании напряжения 12, 24 вольт, обеспечение плавности пуска и остановки с использованием широтно-импульсной модуляции.
Функция регулятора в инвертировании напряжения 12, 24 вольт, обеспечение плавности пуска и остановки с использованием широтно-импульсной модуляции.
блок управления коллекторным двигателем постоянного тока.
Регулятор оборотов в двигателе нужен для совершения плавного разгона и торможения. Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях. Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора. В виде регуляторов оборотов электродвигателей В и В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим , они и помогают совершить кардинальное преобразование характеристики тока форму сигнала, а также частоту.
Простой регулятор скорости вентилятора (12В).
 Регулятор мощности постоянного тока 12 вольт
Регулятор мощности постоянного тока 12 вольт
Забыли пароль? Изменен п. Расшифровка и пояснения — тут.
Самодельный вариатор скорости вращения электродвигателя — Регулятор оборотов электродвигателя 12в своими руками
Эта самодельная схема может быть использована в качестве регулятора скорости для двигателя постоянного тока 12 В с номинальным током до 5 А или как диммер для 12 В галогенных и светодиодных ламп мощностью до 50 Вт. Управление идёт с помощью широтно-импульсной модуляции (ШИМ) при частоте следования импульсов около 200 Гц. Естественно частоту можно при необходимости изменить, подобрав по максимальной стабильности и КПД.
Схема ШИМ регулятора для мотора 12 В
В схеме используется Таймер 7555 для создания переменной ширины импульсов около 200 Гц. Он управляет транзистором Q3 (через транзисторы Q1 — Q2), который контролирует скорость электро двигателя или ламп освещения.
Похожие новости
ШИМ контроллер на 12 вольт
Схема регулятора оборотов минидрели
Всем привет, наверно многие радиолюбители, также как и я, имеют не одно хобби, а несколько.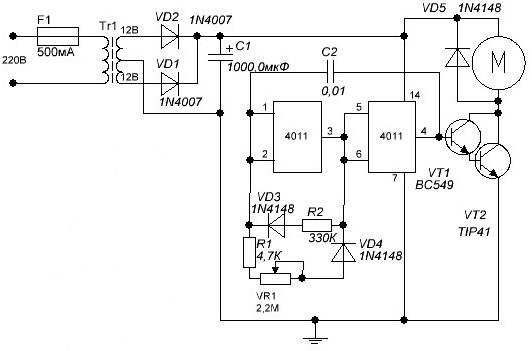 Помимо конструирования электронных устройств занимаюсь фотографией, съемкой видео на DSLR камеру, и видео монтажом. Мне, как видеографу, был необходим слайдер для видео съемки, и для начала вкратце объясню, что это такое. Ниже на фото показан фабричный слайдер.
Помимо конструирования электронных устройств занимаюсь фотографией, съемкой видео на DSLR камеру, и видео монтажом. Мне, как видеографу, был необходим слайдер для видео съемки, и для начала вкратце объясню, что это такое. Ниже на фото показан фабричный слайдер.
Слайдер предназначен для видеосъемки на фотоаппараты и видеокамеры. Он являются аналогом рельсовой системы, которая используется в широкоформатном кино. С его помощью создается плавное перемещение камеры вокруг снимаемого объекта. Другим очень сильным эффектом, который можно использовать при работе со слайдером, — это возможность приблизиться или удалиться от объекта съемки. На следующем фото изображен двигатель, который выбрал для изготовления слайдера.
В качестве привода слайдера используется двигатель постоянного тока с питанием 12 вольт. В интернете была найдена схема регулятора для двигателя, который перемещает каретку слайдера. На следующем фото индикатор включения на светодиоде, тумблер, управляющий реверсом и выключатель питания.
При работе такого устройства важно, чтоб была плавная регулировка скорости, плюс легкое включение реверса двигателя. Скорость вращения вала двигателя, в случае применения нашего регулятора, плавно регулируется вращением ручки переменного резистора на 5 кОм. Возможно, не только я один из пользователей этого сайта увлекаюсь фотографией, и кто-то ещё захочет повторить это устройство, желающие могут скачать в конце статьи архив со схемой и печатной платой регулятора. На следующем рисунке приведена принципиальная схема регулятора для двигателя:
Видео работы
Для плавности увеличения и уменьшения скорости вращения вала существует специальный прибор —регулятор оборотов электродвигателя 220в. Стабильная эксплуатация, отсутствие перебоев напряжения, долгий срок службы — преимущества использования регулятора оборотов двигателя на 220, 12 и 24 вольт.
Для чего нужен частотный преобразователь оборотов
Контроллеры оборотов входят в структуру многих приборов, так как они обеспечивают точность электрического управления.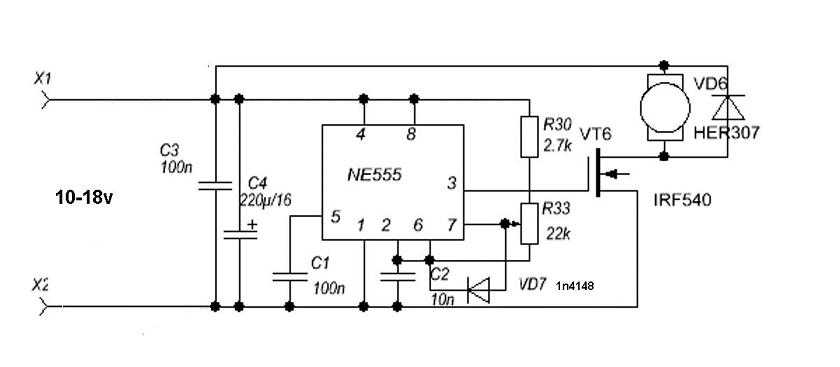 Это позволяет регулировать обороты в нужную величину.
Это позволяет регулировать обороты в нужную величину.
Регулятор оборотов двигателя постоянного тока используется во многих промышленных и бытовых областях. Например:
Выбираем устройство
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
- двигатель переменного тока природный контроллер;
- привод;
- дополнительные элементы.
Прибор может быть куплен в специализированных точках продажи, а можно сделать самому.
Схема регулятора оборотов вращения переменного тока
Существует универсальный прибор 12в для бесколлекторных двигателей.
Для экономии на платежах за электроэнергию наши читатели советуют «Экономитель энергии Electricity Saving Box». Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.
Схема состоит из двух частей—логической и силовой. Микроконтроллер расположен на микросхеме. Эта схема характерна для мощного двигателя. Уникальность регулятора заключается в применении с различными видами двигателей. Питание схем раздельное, драйверам ключей требуется питание 12В.
Прибор триак
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 — конденсатор, R1 — первый резистор, R2 — второй резистор.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Распространённые регулятор тиристор, обладающие простой схемой работы.
Тиристор, работает в сети переменного тока.
К источнику напряжения 24 вольт. Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Сигналы, поступающие на вход системы, образуют обратную связь. Подробнее рассмотрим с помощью микросхемы.
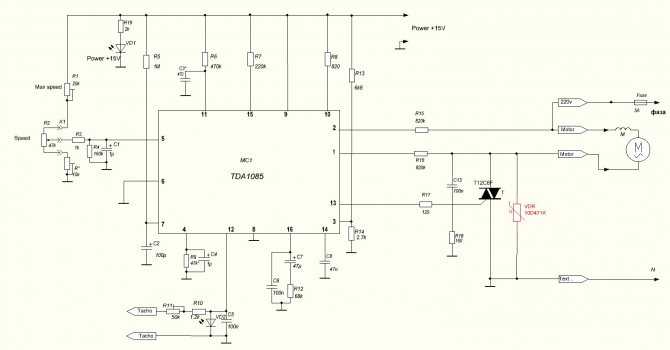
Микросхема TDA 1085
Своими руками можно сделать прибор для гриндера, токарного станка по дереву, точила, бетономешалки, соломорезки, газонокосилки, дровокола и многого другого.
При сборе регулятора правильно выбирать резистор. Так как при большом резисторе, на старте могут быть рывки, а при маленьком резисторе компенсация будет недостаточной.
Регуляторы оборотов вращения однофазных и трехфазных двигателей 24, 12 вольт представляют собой функциональное и ценное устройство, как в быту, так и в промышленности.
Видео № 1. Одноканальный регулятор в работе. Меняет скорость кручения вала мотора посредством вращения ручки переменного резистора.
Видео № 3. Двухканальный регулятор в работе. Независимая установка скорости кручения валов моторов на базе подстроечных резисторов.
Функции и основные характеристики
Одноканальный регулятор для мотора
Конструкция устройства
Принцип работы
Материалы и детали
Примечание 3. Для регулировки токов выше 1,5А транзистор КТ815Г заменяют на более мощный КТ972А (с максимальным током 4А). При этом рисунок печатной платы менять не требуется, так как распределение выводов у обоих транзисторов идентично.
Для дальнейшей работы нужно скачать архивный файл, размещенный в конце статьи, разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора (файл termo1 ), а монтажный чертеж (файл montag1 ) — на белом листе офисной (формат А4).
На глянцевой бумаге печатают чертеж регулятора (файл termo1 ), а монтажный чертеж (файл montag1 ) — на белом листе офисной (формат А4).
Для тестирования устройства необходимо из архива распечатать чертеж диска. Далее нужно наклеить этот чертеж (№ 1) на плотную и тонкую картонную бумагу (№ 2 ). Затем с помощью ножниц вырезается диск (№ 3).
Полученную заготовку переворачивают (№ 1 ) и к центру крепят квадрат черной изоленты (№ 2) для лучшего сцепления поверхности вала мотора с диском. Нужно сделать отверстие (№ 3) как указано на изображении. Затем диск устанавливают на вал мотора и можно приступать к испытаниям. Одноканальный регулятор мотора готов!
Используется для независимого управления парой моторов одновременно. Питание осуществляется от напряжения в диапазоне от 2 до 12 вольт. Ток нагрузки рассчитан до 1,5А на каждый канал.
Принцип работы
Примечание.2. Для оперативной регулировки скорости кручения моторов подстроечные резисторы заменяют с помощью монтажного провода с резисторами переменного сопротивления с показателями сопротивлений, указанными на схеме.
Понадобится печатная плата размером 30×30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита толщиной 1-1,5 мм. В таблице 2 приведен список радиокомпонентов.
Процесс сборки
Чертеж монтажной платы наклеивают к токоведущим дорожкам на противоположной стороне печатной платы. Формируют отверстия на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпасть. Производится цоколёвка транзистора КТ815. Для проверки нужно временно соединить монтажным проводом входы 1 и 2 .
В АРХИВЕ представленные необходимые схемы и чертежи для работы. Эмиттеры транзисторов помечены красными стрелками.
Регулятор оборотов двигателя постоянного тока схема на 12 вольт
Двигатель подключен в цепь к полевому транзистору который управляется широтно-импульсной модуляцией осуществляемой на микросхеме таймере NE555, поэтому и схема получилась такой простой.
ШИМ регулятор реализован с помощью обычного генератора импульсов на нестабильном мультивибраторе, генерирующий импульсы с частотой следования 50 Гц и построенного на популярном таймере NE555. Сигналы поступающие с мультивибратора создают поле смещения на затворе полевого транзистора. Длительность положительного импульса настраивается при помощи переменного сопротивления R2. Чем выше длительность положительного импульса поступающего на затвор полевого транзистора, тем большая мощность подается на электродвигатель постоянного тока. И на оборот чем меньше длительность импульса, тем слабее вращается электродвигатель. Эта схема прекрасно работает от аккумуляторной батареи на 12 вольт.
Сигналы поступающие с мультивибратора создают поле смещения на затворе полевого транзистора. Длительность положительного импульса настраивается при помощи переменного сопротивления R2. Чем выше длительность положительного импульса поступающего на затвор полевого транзистора, тем большая мощность подается на электродвигатель постоянного тока. И на оборот чем меньше длительность импульса, тем слабее вращается электродвигатель. Эта схема прекрасно работает от аккумуляторной батареи на 12 вольт.
Регулирование оборотов двигателя постоянного тока схема на 6 вольт
Регулировка оборотов в этой схеме достигается подачей на электромотор импульсов напряжения, различной длительности. Для этих целей используются ШИМ (широтно-импульсные модуляторы). В данном случае широтно-импульсное регулирование обеспечивается микроконтроллер PIC. Для управления скоростью вращения двигателя используются две кнопки SB1 и SB2, «Больше» и «Меньше». Изменять скорость вращенияможно только при нажатом тумблере «Пуск». Длительность импульса при этом изменяется, в процентном отношении к периоду, от 30 — 100%.
Длительность импульса при этом изменяется, в процентном отношении к периоду, от 30 — 100%.
Устройство собрано на печатной плате размерами 61×52мм. Скачать рисунок печатной платы и файл прошивки можно по ссылке выше. (Смотри в архиве папку 027-el )
Как подключить регулятор оборотов к бесколлекторном двигателю
Содержание
- Часть 8. Настройка регуляторов оборотов бесколлекторного двигателя
- Подключение для настройки
- Процесс настройки
- Калибровка газа
- Калибровка винто-моторной группы
- Управляем бесколлекторными двигателями, господа
- Схема регулятора скорости бесколлекторного двигателя (ESC)
- Схема регулятора
- Питание
- ШИМ и сигналы для ключей
- Обратная связь (контроль напряжения фаз двигателя)
- Датчики Холла
- Измерения аналоговых сигналов
- Задающие сигналы
- UART интерфейс
- Прочее
- Силовая часть
- Возможности прошивки
- Работа регулятора
- Включение
- Запуск
- Настройка регулятора
- Регуляторы хода для бесколлекторных моторов
- Вступление
- Основные характеристики контроллеров
- Особенности подключения
- Настройки
- Программирование
- Возможные проблемы
- О выключателях
- Производители контроллеров
- Заключение
- Подключение бесколлекторного электродвигателя постоянного тока (BLDC) к Arduino
- Необходимые компоненты
- Принцип действия BLDC двигателей
- Почему дроны и вертолеты используют именно BLDC двигатели?
- Зачем нужен контроллер ESC
- Некоторые термины, используемые в тематике BLDC и ESC
- Работа схемы
- Объяснение программы для Arduino
- Видео
Часть 8.
 Настройка регуляторов оборотов бесколлекторного двигателя
Настройка регуляторов оборотов бесколлекторного двигателя
Регуляторы оборотов управляют двигателями по командам полетного контроллера и они тоже сделаны на микроконтроллере и нуждаются в настройке. Еще в статье мы расскажем о калибровке винто-моторной группы.
Подключение для настройки
Есть много способов программирования конфигурации регуляторов оборотов. Самый простой — сделать это в ручную при помощи аппаратуры радиоуправления. Также можно, например, применить для этого специальную карту. Некоторые полетные контроллеры умеют сами выставлять настройки.
Мы будем настраивать при помощи пульта. При этом доступны все настройки и не надо никаких дополнительных устройств.
У нас стоят регуляторы оборотов HobbyKing 25A BlueSeries. Инструкцию к ним можно скачать здесь.
Настройку регуляторов оборота проще всего производить на собранном коптере, когда регуляторы уже подключены к двигателям и подготовлены к подключению аккумулятора. Настройку обязательно производить при снятых пропеллерах! Управляющий провод подключите к третьему канала приемника (канал газа).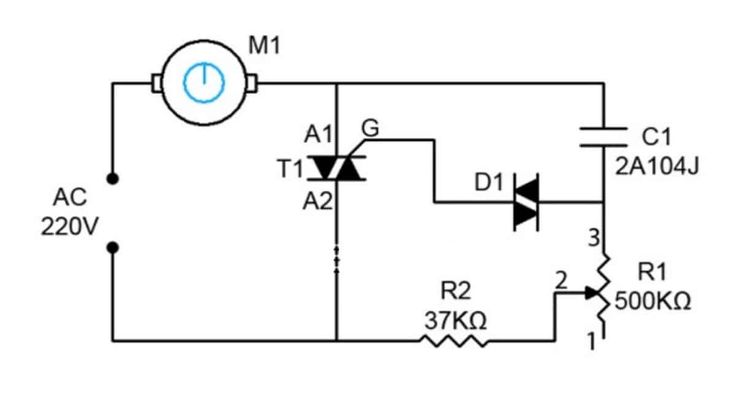 Все остальное отключите от приемника.
Все остальное отключите от приемника.
При таком подключении приемник питается от встроенного стабилизатора регулятора.
Процесс настройки
Методология настройки следующая. Вам необходимо подать на регулятор одновременно питание и максимальный газ. Через пять секунд регулятор перейдет в режим настройки, о чем просигналит писком двигателя. Затем начнется последовательный перебор пунктов меню, каждому из которых соответствует свой звуковой сигнал. Как только регулятор дошел до нужного параметра, нужно опустить газ в минимум, дождаться звукового подтверждения и выключить питания.
Вот как звучит это звуковой меню:
Теперь разберемся с тем, какие настройки нужно выставить:
В итоге, нужно скорректировать всего две настройки.
При нормальном включении двигателя пищат. Первая последовательность звуковых сигналов соответствует количество банок подключенной батареи. Второй цикл показывает состояние торможения. Один сигнал — включено, два — выключено.
Второй цикл показывает состояние торможения. Один сигнал — включено, два — выключено.
Калибровка газа
Для калибровки нужно также включить пульт и установить на максимум газ. Затем подключиться питание регулятора и через 2-3 секунды опустить газ до минимума. Регулятор пропищит о том, что диапазон значений запомнен. При желании можно задать регулировку не от минимального значения, а, например, от середины.
Калибровка винто-моторной группы
Мы не знали куда включить эту информацию, поэтому напишем здесь.
Для снижения вибраций нужно откалибровать винты и двигатели. Для калибровки винтов очень удобно использовать вот такой балансир:
Суть калибровки сводится к выравниванию весов лопастей. Нужно положить винт с балансиром на параллельные направляющие (мы ставим на губки тисков) и найти более тяжелую лопасть. Для подгонки веса поскребите нерабочую часть лопасти канцелярским ножом. Нужно добиться, чтобы пропеллер мог стоять параллельно земле неподвижно.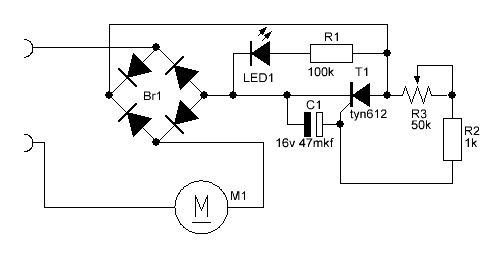
Проверка калибровки винта
На форумах советуют откалибровать еще и двигатель. Теоретически, нужно на запущенный двигатель (без винта) посветить лазером и посмотреть на отражение. Если оно размазано, то нужно наклеить кусочек скотча на двигатель. Если биения уменьшились — хорошо, если нет — надо клеить в другом месте.
На практике делать это сложно: нужен мощный лазер, темнота и терпение. Да и необходимость в этом довольно сомнительная. Мы этот этап не делали.
И в заключении, ссылки на остальные части статей о коптерах:
Часть 1. Что такое квадрокоптер
Часть 2. Элементы квадрокоптера
Часть 3. Все об аккумуляторах для квадрокоптеров
Часть 4. Рама квадрокоптера
Часть 5. Подсветка коптера
Часть 6. Подключение элементов квадрокоптера
Часть 7. Настройка пульта Turnigy9x для коптера
Часть 9. Настройка полетного контроллера DJI NAZA
Часть 10. Гиростабилизированный подвес для камеры SJ4000
Источник
Управляем бесколлекторными двигателями, господа
Привет Хабровчане!
Решил я рассказать «всему свету» о проблеме, с которой столкнулся при постройке своего проекта, и как мне удалось её решить.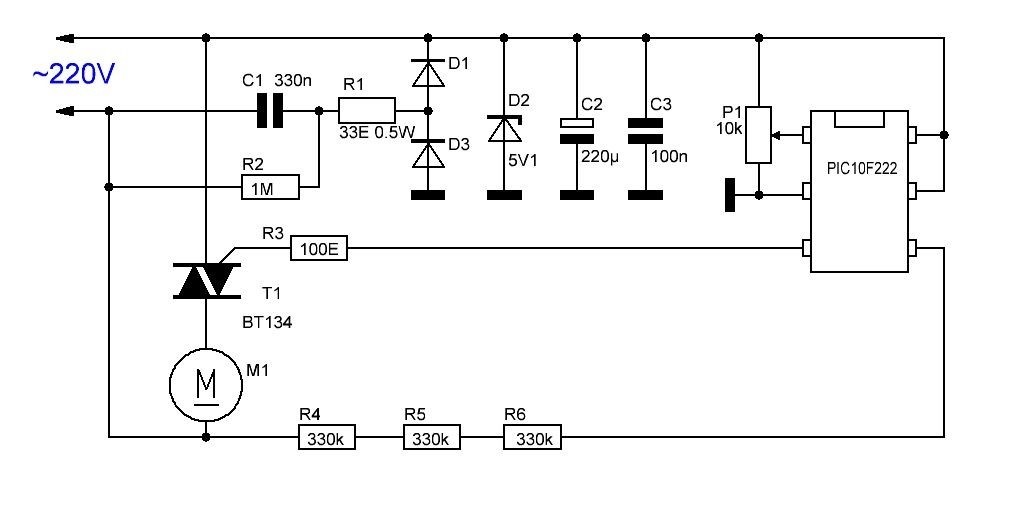
А речь сегодня пойдет о бесколлекторных двигателях, о регуляторах хода и как ими управлять.
Что же такое бесколлекторный двигатель, я не буду долго расписывать (сами можете посмотреть Wiki), а скажу в 2х словах, это 3х фазный двигатель постоянного тока.
И приводится в движение сие чудо благодаря специальному регулятору, который последовательно переключает обмотки с определенной частотой.
Управляя частотой переключения обмоток мы управляем скоростью вращения ротора.
Ну что же, надеюсь тут все понято, идем дальше.
Первые проблемы
Были закуплены 2 комплекта двигатель + регулятор, ждал около месяца, пришли.
Мною овладел приступ безудержного веселья по этому поводу, но, к сожалению, это было ненадолго….
Рассмотрев эти чудеса техники я решил подключить их к источнику питания, и тут то первое разочарование, тихий хлопок (как от КЗ) и тишина, светодиоды не горят, писка нет (а он должен быть), только крутится кулер на регуле, беда…
Побежал в ближайший Хобби магазин, и добрый консультант вынес вердикт: сгорел!
Со вторым такая же история, в общем ребята, не повезло, оба бракованные…
Ну хоть кошечка порадовалась:
Пришлось раскошелиться и купить у них регулятор по цене обоих комплектов (поджимали сроки).
Купил, подключил, все пищит, горит, работает, прям аж душа радуется! (на фото он выделен):
Проблема номер два
Теперь настала пора покрутить двигателем.
А покрутить нужно не с сервотестера или аппы радиоуправления, а с микроконтроллера, а точнее вот с такой платки:
Перелопатив тонны сайтов, перечитав сотни форумов и ответов на мой вопрос, так как же управлять этим регулятором я слышать только одно: «…чувак да там простой ШИМ…», «… ШИМ тебе в помощь…».
Ну ШИМ, так ШИМ.
Написал простенькую программу:
Бился 2 дня, пока не наткнулся на случайный пост, о том, что у регулятора есть защита, и он начинает функционировать только при подаче на его вход ШИМ сигнала 1,5 мс.
Окей, будет сделано.
Дальше я подцепил обыкновенный резистор через АЦП, и опытным путем подобрал крайние значения ШИМ регулятора.
Код получившийся в итоге:
И все заработало.
Теперь все крутиться, шумит, пищит и просто радует.
P.S. Это код для управления сразу 2мя двигателями.
И последняя проблема, питание…
Здесь расскажу немного, а именно, от регулятора идет 3 провода:
Центральная колодка, по порядку Черный — минус, Красный — плюс и Белый — провод управления.
И загвоздка в том, что в отличие от сервоприводов, это не входы под питание, а выходы, т.е. питаемся от них.
К чему я это, да к тому, что подключив регулятор как серву, я чуть не спалил порты на ноутбуке, ибо плата в это время была запитана от USB.
Но к счастью у моего старичка сработала защита и все обошлось перезагрузкой…
Видео работы:
Спасибо большое за внимание.
Надеюсь мой опыт будет полезен для вас.
До скорых встреч.
Источник
Схема регулятора скорости бесколлекторного двигателя (ESC)
Эта схема задумывалась как испытательный стенд. На котором предполагалось создать универсальный настраиваемый регулятор для работы с различными «калибрами» бесколлекторных двигателей: как с датчиками, так и без датчиков положения. В этой статье я опишу схему и принцип работы прошивки регулятора для управления бесколлекторными двигателями с датчиками Холла и без датчиков.
В этой статье я опишу схему и принцип работы прошивки регулятора для управления бесколлекторными двигателями с датчиками Холла и без датчиков.
Схема регулятора
Питание
ШИМ и сигналы для ключей
Обратная связь (контроль напряжения фаз двигателя)
Датчики Холла
Измерения аналоговых сигналов
На вход ADC3(PC3) поступает аналоговый сигнал от датчика тока. Датчик тока ACS756SA. Это датчик тока на основе эффекта Холла. Преимущество этого датчика в том, что он не использует шунт, а значит, имеет внутреннее сопротивление близкое к нулю, поэтому на нем не происходит тепловыделения. Кроме того, выход датчика аналоговый в пределах 5В, поэтому без каких-либо преобразований подается на вход АЦП микроконтроллера, что упрощает схему. Если потребуется датчик с большим диапазоном измерения тока, Вы просто заменяете существующий датчик новым, абсолютно не изменяя схему.
Задающие сигналы
Кроме того, есть вход RC сигнала, который повсеместно используется в дистанционно управляемых моделях. Выбор управляющего входа и его калибровка выполняется в программных настройках регулятора.
Выбор управляющего входа и его калибровка выполняется в программных настройках регулятора.
UART интерфейс
Прочее
Светодиод, сигнализирующий о состоянии регулятора, подключен к выводу PD4.
Силовая часть
Ключи нужно выбирать в зависимости от максимального тока и напряжения питания двигателя (выбору ключей и драйверов будет посвящена отдельная статья). На схеме обозначены IR540, в реальности использовались K3069. K3069 рассчитаны на напряжение 60В и ток 75А. Это явный перебор, но мне они достались даром в большом количестве (желаю и Вам такого счастья).
Возможности прошивки
Работа регулятора
Включение
После включения двигатель издает 1 короткий сигнал (если звук не отключен), включается и постоянно светится светодиод. Регулятор готов к работе.
Для запуска двигателя следует увеличивать величину задающего сигнала. В случае использования задающего потенциометра, запуск двигателя начнется при достижении задающего напряжения уровня примерно 0. 14 В. При необходимости можно выполнить калибровку входного сигнала, что позволяет использовать раные диапазоны управляющих напряжений. По умолчанию настроен демпфер задающего сигнала. При резком скачке задающего сигнала обороты двигателя будут расти плавно. Демпфер имеет несимметричную характеристику. Сброс оборотов происходит без задержки. При необходимости демпфер можно настроить или вовсе отключить.
14 В. При необходимости можно выполнить калибровку входного сигнала, что позволяет использовать раные диапазоны управляющих напряжений. По умолчанию настроен демпфер задающего сигнала. При резком скачке задающего сигнала обороты двигателя будут расти плавно. Демпфер имеет несимметричную характеристику. Сброс оборотов происходит без задержки. При необходимости демпфер можно настроить или вовсе отключить.
Запуск
При опрокидывании двигателя или механическом заклинивании ротора срабатывает защита, и регулятор пытается перезапустить двигатель.
Запуск двигателя с датчиками Холла также выполняется с применением настроек для старта двигателя. Т.е. если для запуска двигателя с датчиками дать полный газ, то регулятор подаст напряжение, которое указано в настройках для старта. И только после того, как двигатель начнет вращаться, будет подано полное напряжение. Это несколько нестандартно для двигателя с датчиками, поскольку такие двигатели в основном применяются как тяговые, а в данном случае достичь максимального крутящего момента на старте, возможно, будет сложно. Тем не менее, в данном регуляторе присутствует такая особенность, которая защищает двигатель и регулятор от выхода со строя при механическом заклинивании двигателя.
Тем не менее, в данном регуляторе присутствует такая особенность, которая защищает двигатель и регулятор от выхода со строя при механическом заклинивании двигателя.
Во время работы регулятор выдает данные об оборотах двигателя, токе, напряжении батарей через порт UART в формате:
Данные выдаются с периодичностью примерно 1 секунда. Скорость передачи по порту 9600.
Настройка регулятора
Переход регулятора в режим настройки происходит при включении регулятора, когда задающий сигнал потенциометра больше нуля. Т.е. Для перевода регулятора в режим настройки следует повернуть ручку задающего потенциометра, после чего включить регулятор. В терминале появится приглашение в виде символа «>«. После чего можно вводить команды.
Регулятор воспринимает следующие команды (в разных версиях прошивки набор настроек и команд может отличаться):
команда «?» выводит в терминал список всех доступных настроек и их значение. Например: Изменить нужную настройку можно командой следующего формата:
pwm.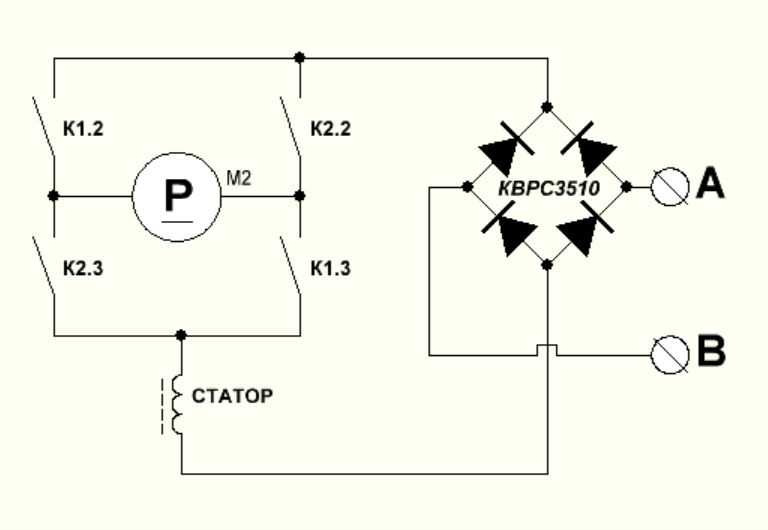 start=15
start=15
Если команда была дана корректно, настройка будет применена и сохранена. Проверить текущие настройки после их изменения можно командой «?«.
Измерения аналоговых сигналов (напряжение, ток) выполняются с помощью АЦП микроконтроллера. АЦП работает в 8-ми битном режиме. Точность измерения занижена намеренно для обеспечения приемлемой скорости преобразования аналогового сигнала. Соответственно, все аналоговые величины регулятор выдает в виде 8-ми битного числа, т.е. от 0 до 255.
Фьюзы микроконтроллера должны быть выставлены на работу с внешним кварцем. Строка для программирования фьюзов с помощью AVRDUDE:
Источник
Регуляторы хода для бесколлекторных моторов
Вступление
Большинство применяемых в моделизме бесколлекторных моторов построены по принципу «вывернутого наизнанку» коллекторного двигателя: статор с обмотками неподвижен, а ротор с постоянными магнитами вращается. Количество обмоток – всегда три.
Основные характеристики контроллеров
«Кратковременный» ток способны держать выходные транзисторы контроллера, но рассеивать выделяемое при этом токе количество тепла контроллер не в состоянии.
Внутреннее сопротивление – полное сопротивление силовых ключей контроллера, без учета проводов. Чем мощнее контроллер, тем меньше его внутреннее сопротивление. Как правило, сопротивление проводов сравнимо с внутренним сопротивлением контроллера и вносит до 30% потерь. Для примера, внутреннее сопротивление контроллера Castle Creations Phoenix-25 13 mOhm, а сопротивление 30 см провода сечением 1кв.мм – 6 mOhm, то есть почти треть потерь приходится на провода.
Особенности подключения
При удлинении проводов от контроллера до батареи начинает сказываться их индуктивность, и может возникнуть ситуация, когда уровень помех по напряжению питания на входе контроллера станет настолько высок, что контроллер не сможет правильно определить положение ротора мотора (иногда при этом еще и «повисает» процессор контроллера). Известно несколько случаев полного «выгорания в дым» контроллеров, при удлинении проводов со стороны аккумулятора до 30см. Если необходимо увеличить длину проводов (например, двигатель стоит в хвосте модели), то надо увеличивать длину проводов от мотора до контроллера. Как правило, контроллеры поставляются с проводами до батареи длиной 13-16см. Такая длина вполне достаточна для надежной работы контроллера, и не следует ее увеличивать более чем на 5см.
Известно несколько случаев полного «выгорания в дым» контроллеров, при удлинении проводов со стороны аккумулятора до 30см. Если необходимо увеличить длину проводов (например, двигатель стоит в хвосте модели), то надо увеличивать длину проводов от мотора до контроллера. Как правило, контроллеры поставляются с проводами до батареи длиной 13-16см. Такая длина вполне достаточна для надежной работы контроллера, и не следует ее увеличивать более чем на 5см.
Настройки
Практически все современные контроллеры имеют множество программных настроек. От них зависит режим работы, надежность, а иногда и работоспособность контроллера в паре с тем или иным мотором. Здесь мы попробуем перечислить основные настройки, и объяснить, как и на что они влияют.
Напряжение выключения мотора (cut-off voltage) – при каком минимальном напряжении на батарее мотор будет выключен. Эта функция предназначена для сохранения работоспособности аппаратуры при разряде батареи и для защиты самой батареи от переразряда (последнее особенно важно для литий- полимерных аккумуляторов). На некоторых контроллерах (например, Jeti серии “ Advansed ”) нет установки напряжения на конкретное число банок в случае использования литиевых батарей, количество банок при этом определяется автоматически.
На некоторых контроллерах (например, Jeti серии “ Advansed ”) нет установки напряжения на конкретное число банок в случае использования литиевых батарей, количество банок при этом определяется автоматически.
При плавном выключении мотора контроллер сбрасывает обороты постепенно, не позволяя напряжению на батарее упасть ниже заданного, при этом контроль над моделью сохраняется до последнего.
Тормоз (brake) – торможение мотора после установки газа в «ноль». Может иметь значения включен/выключен, на некоторых контроллерах есть еще программируемая величина тормоза 50-100% и задержка включения тормоза после полного сброса газа. Это необходимо для защиты шестеренок редуктора в случае использования больших и тяжелых пропеллеров. В некоторых контроллерах, например том же Jeti серии «Advanced» тормоз и плавное выключения мотора – установки взаимоисключающие – для включения плавного отключения мотора надо выключить тормоз и наоборот. Намудрили чехи, однако.
Опережение (Timing) – параметр, от которого зависит мощность и КПД двигателя. Может находится в пределах от 0° до 30°. Физически это электрический угол опережения коммутации обмоток.
Может находится в пределах от 0° до 30°. Физически это электрический угол опережения коммутации обмоток.
Время акселерации или задержка акселерации (acseleleration time или acseleration delay) – устанавливает время набора оборотов после старта до максимума. Устанавливается меньше для моторов с легкими пропеллерами без редукторов и больше для моторов с редукторами и в случае срабатывания защиты по току при резком прибавлении газа.
Также в некоторых контроллерах присутствует режим «гувернер» (governor), он предназначен для вертолетов, когда положению ручки газа соответствуют определенные обороты, а не мощность двигателя, контроллер в данном режиме работает как автоматическая система поддержания оборотов, прибавляя мощность при увеличении нагрузки на двигатель.
В некоторых контроллерах, например в Kontronik серии «Beat», нет отдельных настроек параметров, но есть выбор комплексных режимов – планер, самолет, корабль, вертолет и даже автомобиль с задним ходом!
Программирование
Возможные проблемы
О выключателях
Привлекает решение проблемы выключателей у контроллеров ТММ.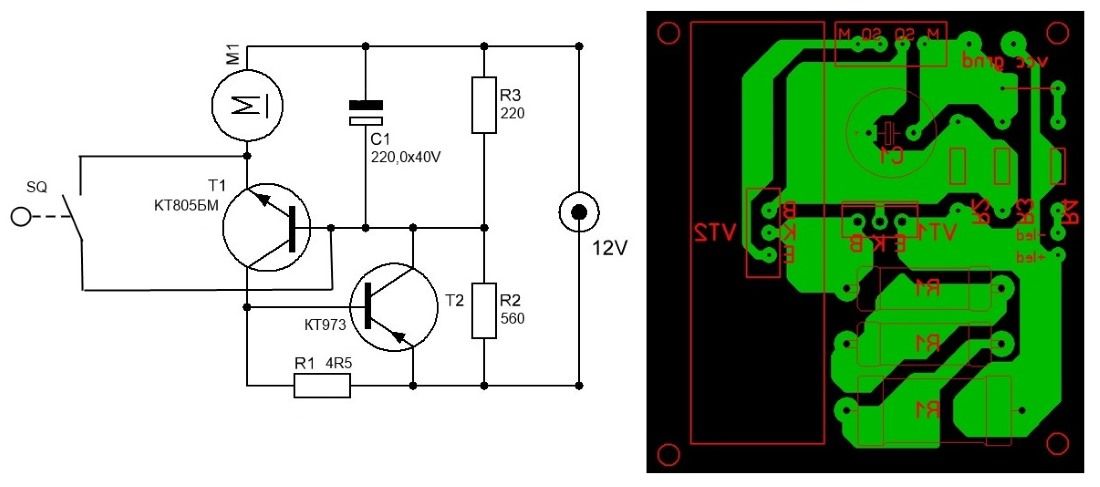 У них каждая модель имеет версию с выключателем и без. Причем выключатель электронный, работает на размыкание, и если он в полете случайно оторвется (что вообще-то трудно себе представить) то контроллер и аппаратура останется включенной. Если контроллер ТММ забыть выключить, он при отсутствии сигнала с приемника начнет попискивать мотором. Подобная функция есть и у Astro Flight.
У них каждая модель имеет версию с выключателем и без. Причем выключатель электронный, работает на размыкание, и если он в полете случайно оторвется (что вообще-то трудно себе представить) то контроллер и аппаратура останется включенной. Если контроллер ТММ забыть выключить, он при отсутствии сигнала с приемника начнет попискивать мотором. Подобная функция есть и у Astro Flight.
Про «выключатель» у контроллеров Jeti уже упоминалось в статье про литий- полимерные аккумуляторы, он выключает лишь питание приемника, контроллер при этом всегда включен. И не подает никаких сигналов об этом постепенно разряжая «в ноль» батарею, что для литиевых аккумуляторов заканчивается фатально.
Производители контроллеров
Лидером в производстве профессиональных контроллеров для спортсменов является, конечно же Schulze Electronik – на этих контроллерах летает, плавает и ездит большинство спортсменов. Однако это и самые дорогие контроллеры.
Далее в списке популярности стоит Castle Creations – сравнительно молодая фирма (основана в 1997г), специализирующаяся исключительно на выпуске регуляторов хода. В Америке она является лидером по количеству продаж.
В Америке она является лидером по количеству продаж.
Также профессиональные, но опять-таки довольно дорогие контроллеры для спортсменов делает немецкая фирма Kontronik.
Продукция чешских фирм MGM Compro (это их контроллеры называются TMM) и Jeti Models (они же делают контроллеры для фирмы Hacker motors) ориентирована в основном на рынок хобби.
Американская фирма Astro Flight, специализирующаяся на выпуске электромоторов для моделизма, также делает контроллеры к своим моторам, однако отдельно от моторов найти их в продаже проблемматично.
Заключение
Источник
Подключение бесколлекторного электродвигателя постоянного тока (BLDC) к Arduino
В этой статье мы рассмотрим управление скоростью вращения бессенсорного бесколлекторного электродвигателя постоянного тока A2212/13T (Sensorless BLDC outrunner motor), часто используемого для конструирования дронов, с помощью ESC (Electronic Speed Controller – электронный контроллер скорости) и платы Arduino.
Необходимые компоненты
Принцип действия BLDC двигателей
Бесколлекторные электродвигатели постоянного тока (BLDC двигатели) в настоящее время часто используются в потолочных вентиляторах и электрических движущихся транспортных средствах благодаря их плавному вращению. В отличие от других электродвигателей постоянного тока BLDC двигатели подключаются с помощью трех проводов, выходящих из них, при этом каждый провод образует свою собственную фазу, то есть получаем трехфазный мотор.
Хотя BLDC относятся к двигателям постоянного тока они управляются с помощью последовательности импульсов. Для преобразования напряжения постоянного тока в последовательность импульсов и распределения их по трем проводникам используется контроллер ESC (Electronic speed controller). В любой момент времени питание подается только на две фазы, то есть электрический ток заходит в двигатель через одну фазу, и покидает его через другую. Во время этого процесса запитывается катушка внутри двигателя, что приводит к тому, что магниты выравниваются по отношению к запитанной катушке. Затем контроллер ESC подает питание на другие два провода (фазы) и этот процесс смены проводов, на которые подается питание, продолжается непрерывно, что заставляет двигатель вращаться. Скорость вращения двигателя зависит от того как быстро подается энергия на катушку двигателя, а направление вращения – от порядка смены фаз, на которые поочередно подается питание.
Затем контроллер ESC подает питание на другие два провода (фазы) и этот процесс смены проводов, на которые подается питание, продолжается непрерывно, что заставляет двигатель вращаться. Скорость вращения двигателя зависит от того как быстро подается энергия на катушку двигателя, а направление вращения – от порядка смены фаз, на которые поочередно подается питание.
Существуют различные типы BLDC двигателей – давайте рассмотрим основные из них. Различают Inrunner и OutRunner BLDC двигатели. В Inrunner двигателях магниты ротора находятся внутри статора с обмотками, а в OutRunner двигателях магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками. То есть в Inrunner (по этому принципу конструируется большинство двигателей постоянного тока) ось внутри двигателя вращается, а оболочка остается неподвижной. А в OutRunner сам двигатель вращается вокруг оси с катушкой, которая остается неподвижной. OutRunner двигатели особенно удобны для применения в электрических велосипедах, поскольку внешняя оболочка двигателя непосредственно приводит в движение колесо велосипеда, что позволяет обойтись без механизма сцепления. К тому же OutRunner двигатели обеспечивают больший крутящий момент, что делает их также идеальным выбором для применения в электрических движущихся средствах и дронах. Поэтому и в этой статье мы будем рассматривать подключение к платы Arduino двигателя OutRunner типа.
К тому же OutRunner двигатели обеспечивают больший крутящий момент, что делает их также идеальным выбором для применения в электрических движущихся средствах и дронах. Поэтому и в этой статье мы будем рассматривать подключение к платы Arduino двигателя OutRunner типа.
Примечание : существует еще такой тип BLDC двигателей как бесстержневой (coreless), который находит применение в «карманных» дронах. Эти двигатели работают по несколько иным принципам, но рассмотрение принципов их работы выходит за рамки данной статьи.
BLDC двигатели с датчиками (Sensor) и без датчиков (Sensorless). Для BLDC двигателей, которые вращаются плавно, без рывков, необходима обратная связь. Поэтому контроллер ESC должен знать позиции и полюса магнитов ротора чтобы правильно запитывать статор. Эту информацию можно получить двумя способами: первый из них заключается в размещении датчика Холла внутри двигателя. Датчик Холла будет обнаруживать магнит и передавать информацию об этом в контроллер ESC. Этот тип двигателей называется Sensor BLDC (с датчиком) и он находит применение в электрических движущихся транспортных средствах. Второй метод обнаружения позиции магнитов заключается в использовании обратной ЭДС (электродвижущей силы), генерируемой катушками в то время когда магниты пересекают их. Достоинством этого метода является то, что он не требует использования каких либо дополнительных устройств (датчик Холла) – фазовый провод самостоятельно используется в качестве обратной связи благодаря наличию обратной ЭДС. Этот метод используется в двигателе, рассматриваемом в нашей статье, и именно он чаще всего применяется в дронах и других летающих устройствах.
Этот тип двигателей называется Sensor BLDC (с датчиком) и он находит применение в электрических движущихся транспортных средствах. Второй метод обнаружения позиции магнитов заключается в использовании обратной ЭДС (электродвижущей силы), генерируемой катушками в то время когда магниты пересекают их. Достоинством этого метода является то, что он не требует использования каких либо дополнительных устройств (датчик Холла) – фазовый провод самостоятельно используется в качестве обратной связи благодаря наличию обратной ЭДС. Этот метод используется в двигателе, рассматриваемом в нашей статье, и именно он чаще всего применяется в дронах и других летающих устройствах.
Почему дроны и вертолеты используют именно BLDC двигатели?
Сейчас существует множество различных типов дронов – с двумя лопастями, с четырьмя лопастями и т.д. Но все они используют именно BLDC двигатели. Почему именно их, ведь BLDC двигатели стоят дороже чем обычные электродвигатели постоянного тока?
Существует несколько причин для этого:
Зачем нужен контроллер ESC
Как мы уже знаем, для функционирования BLDC двигателей необходим какой-нибудь контроллер, который преобразует напряжение постоянного тока от батарейки в последовательность импульсов, подаваемую в определенном порядке на провода (фазы) двигателя. Этот контроллер называется ESC (Electronic Speed Controller – электронный контроллер скорости). Основной обязанностью данного контроллера является правильная подача питания на провода BLDC двигателя чтобы двигатель вращался в нужном направлении. Это осуществляется с помощью считывания обратной ЭДС (back EMF) с каждого провода и подачи питания на катушку в то время когда магнит пересекает ее. Внутри себя контроллер ESC содержит достаточно много разнообразной электроники и при желании вы можете подробно изучить его устройство по соответствующим материалам в сети интернет. Здесь же мы кратко рассмотрим рассмотрим только основные компоненты его конструкции.
Этот контроллер называется ESC (Electronic Speed Controller – электронный контроллер скорости). Основной обязанностью данного контроллера является правильная подача питания на провода BLDC двигателя чтобы двигатель вращался в нужном направлении. Это осуществляется с помощью считывания обратной ЭДС (back EMF) с каждого провода и подачи питания на катушку в то время когда магнит пересекает ее. Внутри себя контроллер ESC содержит достаточно много разнообразной электроники и при желании вы можете подробно изучить его устройство по соответствующим материалам в сети интернет. Здесь же мы кратко рассмотрим рассмотрим только основные компоненты его конструкции.
Некоторые термины, используемые в тематике BLDC и ESC
При изучении принципов работы BLDC двигателей и контроллеров ESC вы можете столкнуться с некоторыми терминами, используемыми в данной тематике. Кратко рассмотрим основные из этих терминов.
Braking (торможение) – определяет насколько быстро BLDC двигатель может остановить свое вращение.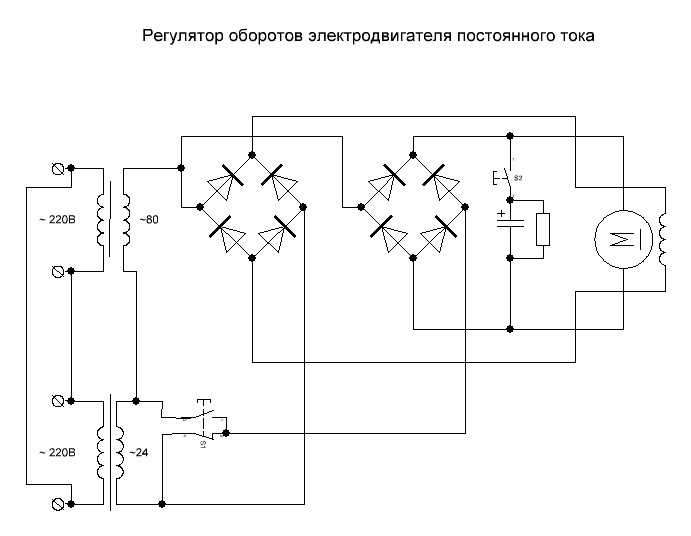 Это особенно актуально для летающих средств (дронов, геликоптеров и т.д.) поскольку они вынуждены часто изменять количество оборотов двигателя в минуту чтобы маневрировать в воздухе.
Это особенно актуально для летающих средств (дронов, геликоптеров и т.д.) поскольку они вынуждены часто изменять количество оборотов двигателя в минуту чтобы маневрировать в воздухе.
Soft Start (плавный пуск, старт) – эта способность особенно важна для BLDC двигателей когда вращающий момент от него на исполнительный механизм (колесо, винт и т.д.) передается через механизм передач, обычно состоящий из шестерен. Плавный пуск означает, что двигатель не начнет сразу вращаться с максимальной скоростью, а будет увеличивать свою скорость вращения постепенно независимо от того, с какой скоростью нарастает управляющее воздействие. Плавный пуск значительно снижает износ шестерен, входящих в передаточный механизм.
Motor Direction (направление вращения двигателя) – обычно направление вращения BLDC двигателей не изменяется в процессе эксплуатации, однако во время сборки и тестирования работы изделия может потребоваться изменение направления вращения двигателя, обычно это можно сделать просто поменяв местами любые два провода двигателя.
Работа схемы
Схема подключения BLDC двигателя и контроллера ESC к плате Arduino представлена на следующем рисунке.
Как видите, схема достаточно проста. Контроллеру ESC необходим источник питания с напряжением 12V и током как минимум 5A. Для питания схемы можно использовать адаптер или Li-Po батарейку. Три фазы (провода) BLDC двигателя необходимо подсоединить к трем выходным проводам контроллера ESC – неважно в каком порядке.
Предупреждение : у некоторых контроллеров ESC нет выходных проводов, в этом случае вам необходимо будет припаивать провода от BLDC двигателя к контактам контроллера ESC. Обязательно изолируйте эти оголенные места (пайки) с помощью изоляционной ленты потому что через эти провода возможно протекание достаточно больших токов и любое короткое замыкание может привести к повреждению двигателя и контроллера ESC.
Схема BEC (Battery Eliminator circuit) в контроллере ESC будет самостоятельно обеспечивать (регулировать) постоянное напряжение +5V, поэтому его можно непосредственно использовать для питания платы Arduino.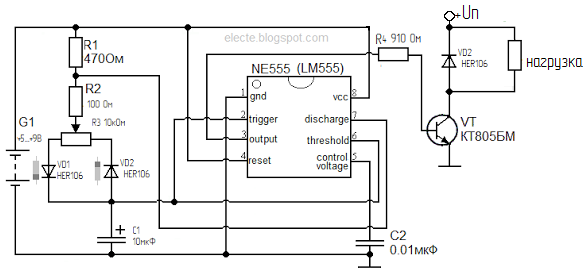 Для управления скоростью вращения двигателя в схеме используется потенциометр, подключенный к контакту A0 платы Arduino.
Для управления скоростью вращения двигателя в схеме используется потенциометр, подключенный к контакту A0 платы Arduino.
Внешний вид собранной конструкции показан на следующем рисунке.
Объяснение программы для Arduino
Полный код программы приведен в конце статьи, здесь же мы рассмотрим только его основные фрагменты.
Для управления BLDC двигателем мы будем формировать ШИМ сигнал с частотой 50 Гц и изменяемым от 0 до 100% коэффициентом заполнения. Значение коэффициента заполнения будет управляться с помощью потенциометра. То есть, вращая потенциометр, мы будем управлять скоростью вращения двигателя. Как уже указывалось, управление BLDC двигателем очень похоже на управление сервомотором с помощью ШИМ 50 Гц, поэтому в данном случае мы будем использовать ту же самую библиотеку, которую использовали для управления сервомотором. Если вы начинающий в изучении платформы Arduino, то перед дальнейшим прочтением данной статьи рекомендуем вам изучить принципы формирования ШИМ сигнала в Arduino и подключение сервомотора к плате Arduino.
ШИМ сигнал можно генерировать только на тех цифровых контактах платы Arduino, которые обозначены символом
. В нашей схеме мы будем управлять контроллером ESC с контакта 9 платы Arduino, поэтому следующей командой мы прикрепим контроллер ESC к этому контакту:
Источник
Видео
Уроки Arduino — управление бесколлекторным мотором
РЕГУЛЯТОР ОБОРОТОВ двигателя стиральной машины с Aliexpress. Подключение, реверс, схема
Покажу как подключить двигатель от стиральной машины. 2 регулятора оборотов. Реверс двигателя.
Регулятор скорости для бесколлекторного двигателя
Регулятор оборотов с Алиэкспресс.Подключение и обзор.
Диммер или регулятор напряжения, мощности и оборотов коллекторного двигателя 2000W. Aliexpress
Дешёвый регулятор для бесколлекторного мотора. Купил на BANGGOOD https://goo.gl/ir4NC2 !
Регулятор скоростного двигателя контроллер 400 Вт преобразования частоты с Aliexpress
Диммер из Китая 220 Вольт, 2000 Ватт | Обзор — Испытание .
Ремонт Регулятора скорости бесколлекторного двигателя Remo Hobby
схема%20схема%20100v%20постоянный ток%20двигатель%20скорость%20таблица данных контроллера и примечания по применению
Инструменты Техаса
Инструменты Техаса
 org/Product»>
org/Product»>Инструменты Техаса
Инструменты Техаса
Инструменты Техаса
 org/Product»>
org/Product»>Инструменты Техаса
схема%20схема%20100v%20dc%20двигатель%20скорость%20контроллер Листы данных Context Search
| Каталог данных | MFG и тип | ПДФ | Теги документов |
|---|---|---|---|
| Схема платы питания ЖК-дисплея Реферат: схема жесткого диска samsung СХЕМА ОСНОВНОЙ ПЛАТ ИЧ5-М схема жесткого диска схема питания последовательность схема схема схема samsung схема зарядного устройства ddr схема | Оригинал | 47ent схема платы питания жк схема жесткого диска самсунг СХЕМА ГЛАВНОЙ ПЛАТЫ ИЧ5-М схема жесткого диска последовательность мощности схематический принципиальная схема самсунг схема зарядного устройства схема ddr | |
принципиальная схемаS Реферат: 911p «Схемы схем» samsung 943 схема | Оригинал | ||
| Схема платы питания ЖК-дисплея Реферат: ИЧ5-М схема схема схема ЖК samsung samsung dmb samsung ddr схема зарядного устройства samsung hdd схема схема датчик переменного тока ddr схема | Оригинал | ||
СХЕМА Плата VGA Аннотация: схема телевизора samsung схема основной платы телевизора схема samsung схема телевизора схема телевизора samsung | Оригинал | ||
САМСУНГ 834 Резюме: b527 EXF-0023-05 samsung конфиденциальный SHORT13 SAMSUNG 840 samsung 822 схема | Оригинал | ||
принципиальная схема самсунг Резюме: нет абстрактного текста | Оригинал | ||
| Схема клавиатуры и тачпада Аннотация: схема сенсорной панели Схематические диаграммы Схема платы модема Схема платы ЖК-дисплея RB5C478 RJ11 4-контактный разъем для печатной платы Резистор 4,7 кОм BA41-00037A K935U | Оригинал | S630/S670 W48S87-72HTR схема клавиатуры и тачпада схема тачпада Схематические диаграммы схема платы модема схема платы питания жк RB5C478 RJ11 4-контактный разъем для печатной платы резистор 4.7кОм БА41-00037А К935У | |
Принципиальные схемы Реферат: SHEET30 Samsung P40 samsung 943 «Схематические диаграммы» принципиальная схема основной платы | Оригинал | ||
схематические символы Реферат: Навигатор проекта ispLEVER с использованием иерархии в VHDL Design схема интерфейса lpc | Оригинал | ||
2008 — КОД VHDL К ШИННОМУ ИНТЕРФЕЙСУ LPC Аннотация: схематические символы FD1S3IX LCMXO256C TQFP100 простой проект vhdl | Оригинал | ||
принципиальная схема самсунг Резюме: нет абстрактного текста | Оригинал | ||
самсунг Резюме: нет абстрактного текста | Оригинал | ||
схема карты pci Реферат: Схема карты памяти ПК s850 Схема s820 Схема s820 | Оригинал | S820/S850 схема pci-карты с850 схема памяти пк карты схема s820 с820 | |
6143 Аннотация: схема телефонного интерфейса схема входа spdif схематическая схема аудиоустройства схема монитора электронная схема WM8350 Eh21 | Оригинал | 6143-EV1-REV3 WM8350 6143 схема телефонного интерфейса вход spdif схематический принципиальная схема звукового устройства схема монитора электронная схема Эх21 | |
2005 — Полный отчет проекта по счетчику объектов Abstract: решетчатая логика Полный отчет о проекте по счетчику объектов с использованием семисегментного дисплея LC4256V Руководство по проектированию ABEL Руководство по проектированию ABEL-HDL Справочное руководство по ABEL-HDL | Оригинал | ||
принципиальная схема samsung led Реферат: Samsung p28 Схема платы питания Samsung 546 LCD SCHEMATIC Плата VGA Схема платы контроллера ЖК-дисплея Схема платы Samsung LCD GFX 49samsung lcd схемы северный мост | Оригинал | ||
схема Реферат: принципиальная схема электронная Д-10 Д-12 Д-16 Д-18 конструкция LXD9784 | Оригинал | LXD9784 схематический схемы электронная схема Д-10 Д-12 Д-16 Д-18 дизайн | |
Поворотные переключатели Реферат: Ползунковые переключатели EG1218 EG1206A EG1206 EG1205A EG1205 EG1201A EG1201 EG-2215 | Оригинал | 500 В постоянного тока EG4319 EG4319A Поворотные переключатели Ползунковые переключатели EG1218 ЭГ1206А ЭГ1206 ЭГ1205А ЭГ1205 ЭГ1201А EG1201 ЭГ-2215 | |
2008 — WM8741 Реферат: WM8741-6060-DS28-EV2-REV1 wolfson microelectronics wm8741 схема WM8741-6060-DS28EV2-REV1 DS28 Eh21 | Оригинал | WM8741-6060-DS28-EV2-REV1 WM8741 WM8741-6060-DS28-EV2-REVдля WM8741 WM8741-6060-DS28-EV2-REV1 Вольфсон микроэлектроника wm8741 схематический WM8741-6060-DS28EV2-REV1 ДС28 Эх21 | |
Недоступно Резюме: нет абстрактного текста | Оригинал | ЭГ1206А ЭГ1206 EG4319EG4319A | |
2009 — 6220-EV1-REV1 Аннотация: WM8993 принципиальная схема аудиоустройства Eh21 6220e | Оригинал | 6220-EV1-REV1 WM8993 2009 год 6220-EV1-REV1 WM8993 принципиальная схема звукового устройства Эх21 6220е | |
Поворотные переключатели Резюме: eg1271a EG2210A EG2201B EG2201A EG2201 EG1271 EG1206A EG1206 TACT SWITCH техническое описание | Оригинал | ЭГ1206А ЭГ1206 EG4319 EG4319A Поворотные переключатели например1271а ЭГ2210А EG2201B ЭГ2201А EG2201 EG1271 ЭГ1206А ЭГ1206 ТАКТИЧЕСКИЙ ПЕРЕКЛЮЧАТЕЛЬ | |
1997 — Недоступно Резюме: нет абстрактного текста | Оригинал | ЭПЕ6087А ЭПЕ6165С ЭПЕ6173С ЭПЕ6046С ЭПЕ6062С ЭПЕ6065С ЭПЕ6141С ЭПЕ6172АС ЭПЕ6174 EPE6177 | |
dffeas Аннотация: техническое описание конечного автомата Verilog Code обработка изображений фильтрация rtl серия ups принципиальная схема QII51013-7 Управление станком карта karnaugh FLIPFLOP SCHEMATIC схема счетчика | Оригинал | QII51013-7 dffeas техническое описание конечного автомата обработка изображений кодом Verilog фильтрация серия rtl принципиальная схема ИБП Управление станком карта Карно СХЕМА ТРАНСПОРТА принципиальная схема счетчика | |
2009 — rtl серия Аннотация: принципиальная схема TTL OR Gates UG685 | Оригинал | UG685 серия rtl схематический Схема TTL OR Gates UG685 | |
 org/Product»>
org/Product»> org/Product»>
org/Product»>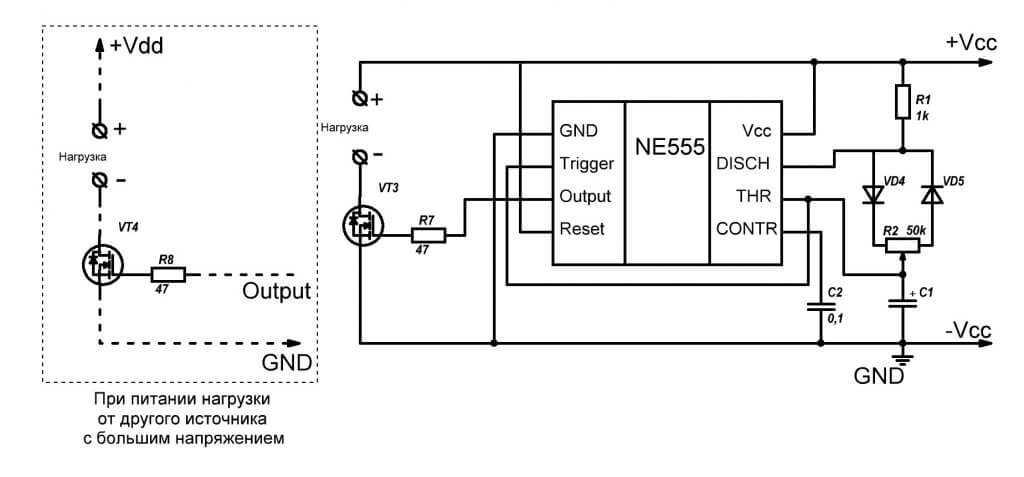 org/Product»>
org/Product»>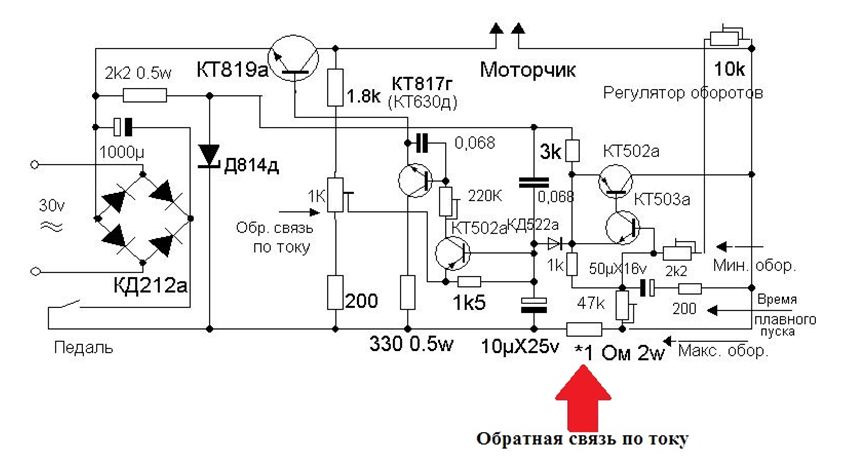 org/Product»>
org/Product»>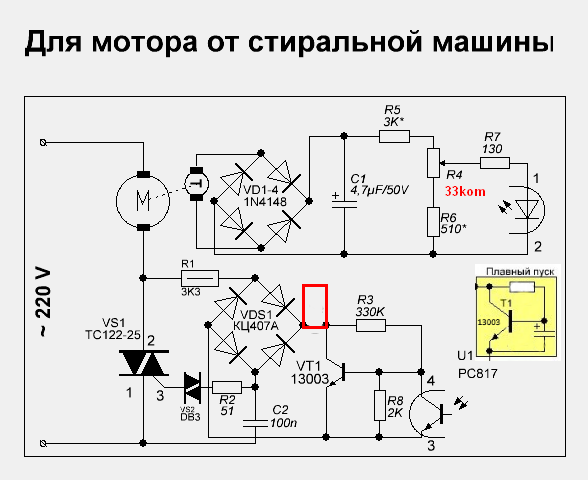 org/Product»>
org/Product»> org/Product»>
org/Product»> org/Product»>
org/Product»> org/Product»>
org/Product»> Предыдущий
1
2
3
…
23
24
25
Далее
Как сделать схему регулятора скорости двигателя постоянного тока (50 В, 15 А)
Всем привет! сегодня мы собираемся построить схему регулятора скорости двигателя постоянного тока, способную управлять двигателем постоянного тока 50 В, 15 А. Принципиальная схема, работа и компоненты, используемые при создании этого проекта, подробно объясняются. Это самый полный регулятор скорости двигателя постоянного тока, который вы найдете в Интернете.
Вы можете посмотреть это видео для рабочей части проекта.
После подключения требуемого входа напряжения и двигателя к выходной клемме скорость двигателя можно увеличить или уменьшить с помощью потенциометра.
СОДЕРЖАНИЕ
- Спецификации этого контроллера скорости двигателя DC:
- DC Схема контроллера. ЦЕПЬ РЕГУЛЯТОРА
- Как работает эта схема регулятора скорости?
- Контроллер скорости двигателя постоянного тока в действии
- Важные моменты
DC Скорость двигателя.
0 кОм резистор 6.0553
Simplifying the DC Motor Speed Controller Circuit
At first, эта схема может показаться очень сложной, поэтому давайте упростим ее. Эта схема разделена на три основные части:
Эта схема разделена на три основные части:
Регулятор напряжения или понижающий преобразователь
ШИМ-генератор.
Цепь переключения.
Теперь давайте разберем каждую часть по отдельности. Я использую настольный блок питания для питания схемы. И установите напряжение около 12 В в качестве входного напряжения для регулятора скорости. Я использую осциллограф для анализа сигналов.
Для лучшего понимания я сначала пройдусь по цепи переключения:
ЦЕПЬ КОММУТАЦИОННОЙ ЦЕПИ
Цепь коммутации регулятора скорости двигателя постоянного тока
Схема переключения используется для включения и выключения выхода на очень высокой частоте. Здесь Mosfet используется для выполнения этой работы.
МОП-транзистор может переключать высокое выходное напряжение между его стоком и истоком, если на его затвор подается пороговое напряжение. Это пороговое напряжение, как правило, очень меньше, чем напряжение, которое Mosfet способен переключать, или напряжение между его стоком и истоком.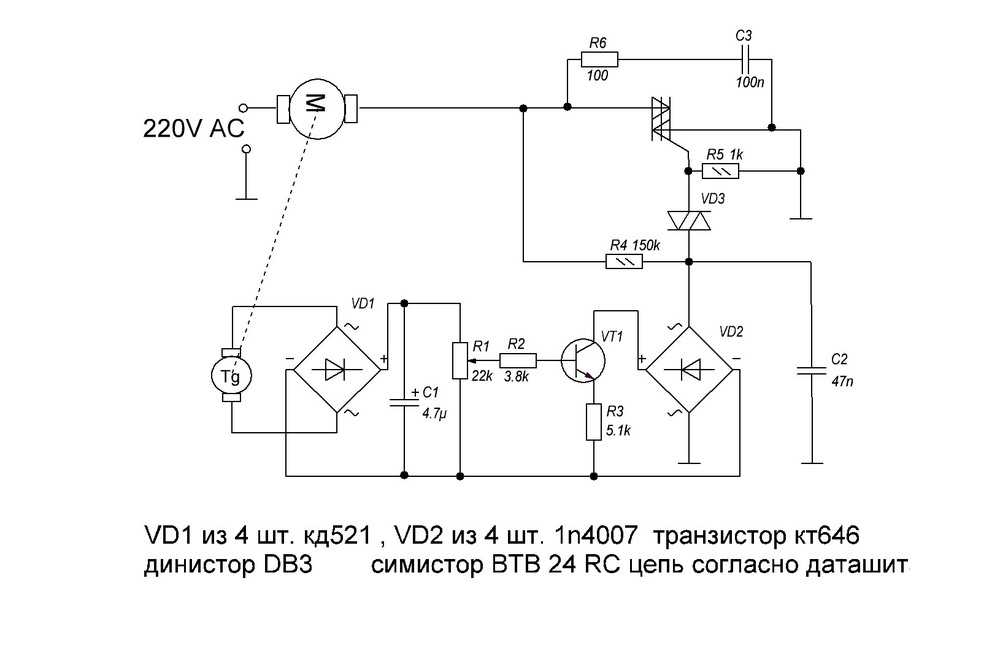
Кроме того, по мере того, как напряжение на затворе МОП-транзистора превышает пороговое напряжение затвора, все больше и больше тока протекает через сток к истоку.
Предостережение : Пороговое напряжение — это напряжение, при котором МОП-транзистор начинает немного проводить ток. Чтобы полевой МОП-транзистор работал достаточно, чтобы управлять значительной нагрузкой, ему также требуется некоторое дополнительное напряжение.
Таким образом, если двигатель постоянного тока подключен между затвором и истоком MOSFET, напряжением на нем и, следовательно, скоростью можно управлять, контролируя напряжение на затворе. А для этого нам нужно переменное напряжение на воротах. А вот и ШИМ-генератор 9.0547 спешит на помощь.
ЦЕПЬ ГЕНЕРАТОРА ШИМ
Цепь генератора ШИМ контроллера скорости двигателя постоянного тока
Требуемое переменное напряжение на затворе может быть легко обеспечено с помощью напряжения ШИМ. ШИМ или широтно-импульсная модуляция — это метод, используемый для получения любого напряжения от 0 до максимума входного напряжения.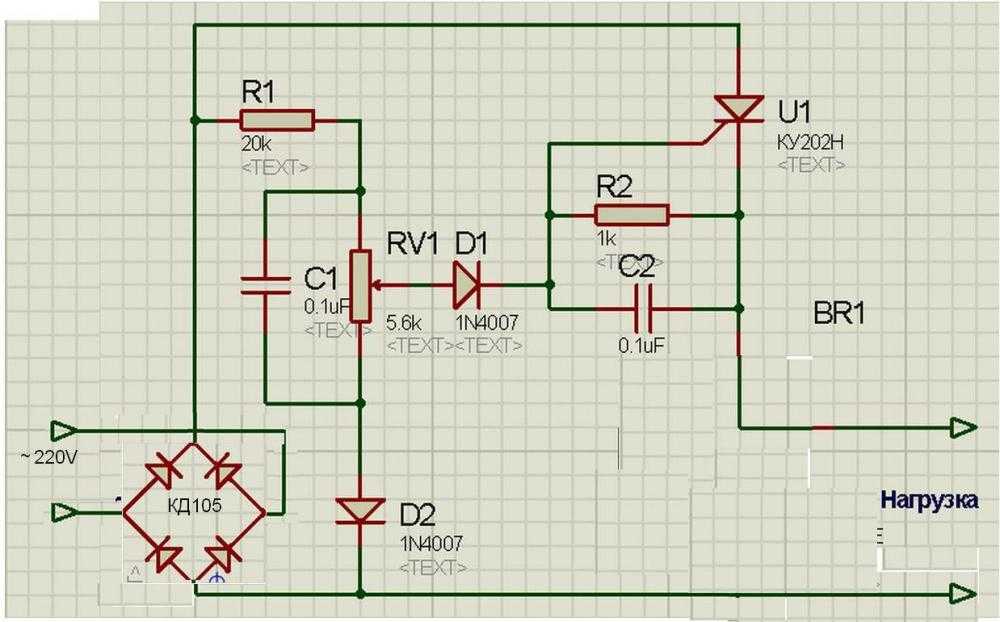 Это достигается коммутацией входного напряжения с определенной частотой и определенной скважностью.
Это достигается коммутацией входного напряжения с определенной частотой и определенной скважностью.
Допустим, у нас есть входное напряжение 5В. Это может быть либо 5 В, либо 0. Теперь, если его включать и выключать с очень высокой частотой, мы получаем прямоугольную форму волны.
Допустим, время включения составляет 50 % от общего времени. Эти 50% называются рабочим циклом волны ШИМ, что дает нам конечное напряжение 2,5 вольта. По мере увеличения этого времени включения или рабочего цикла общее напряжение увеличивается.
И когда рабочий цикл достигает 100%, мы получаем 5 вольт на выходе. Точно так же, когда он равен 0%, мы получаем 0 вольт на выходе. Это называется ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ, поскольку мы модулируем ширину импульса для получения переменного напряжения.
Узнайте больше о ШИМ здесь: ШИМ в деталях
Форма волны ШИМ
Схема регулятора скорости здесь генерирует волну ШИМ с помощью таймера 555 IC . Эта ИС обеспечивает требуемое переменное напряжение на затворе MOSFET, работая в нестабильном режиме.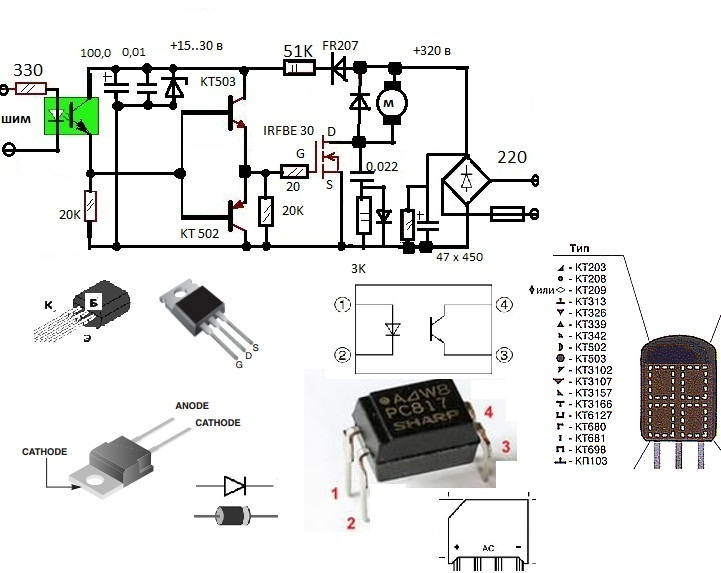
Теперь существует определенный предел входного напряжения ИС, который наверняка меньше предела напряжения этого регулятора скорости.
Следовательно, чтобы обеспечить подходящее рабочее напряжение для ИС таймера 555, используется схема регулятора напряжения, которая обеспечивает фиксированное напряжение для ИС. 9Для этой цели в данной схеме используется регулятор напряжения 0546 LM317 .
ЦЕПЬ РЕГУЛЯТОРА НАПРЯЖЕНИЯ
Цепь регулятора напряжения регулятора скорости двигателя постоянного тока
В данном случае используется регулятор напряжения LM317. Он обеспечивает переменное напряжение от 1,25 до 37 вольт. Он используется здесь из-за его нескольких преимуществ по сравнению с другими регуляторами напряжения, такими как Программируемое выходное напряжение , Высокий выходной ток , лучшая линия и регулирование нагрузки.
Узнайте больше о регуляторах напряжения здесь: Регуляторы напряжения в деталях
Как работает эта схема регулятора скорости?
Конденсатор 330 мкФ подключается к клеммам входного питания для сглаживания постоянного тока. За ним следует последовательно резистор 330 Ом с конденсатором 47 мкФ , образующим фильтр нижних частот, который затем питает регулятор напряжения LM317.
За ним следует последовательно резистор 330 Ом с конденсатором 47 мкФ , образующим фильтр нижних частот, который затем питает регулятор напряжения LM317.
Этот регулятор напряжения программируется с помощью двух резисторов (R3 и R2) , чтобы дать постоянное напряжение 9 вольт.
Стоит отметить, что для получения этого выхода 9 В падение напряжения должно быть больше 2,5 В или входное напряжение должно быть не менее 11,5 В. Чтобы получить выходное напряжение, отличное от этого, вы должны изменить значения этих резисторов в соответствии с частотной формулой, указанной в техническом описании.
| VO = VREF (1 + R2 / R1) + (IADJ × R2) |
Загрузите техническое описание LM317 отсюда: техническое описание LM317
Здесь R2 равен 6,2k, а R1 равен 1k. С г. Яприл. находится в диапазоне мкА, просто игнорируйте его здесь. Это дает нам выходное напряжение 9 вольт. Затем эти 9 вольт питают таймер 555 .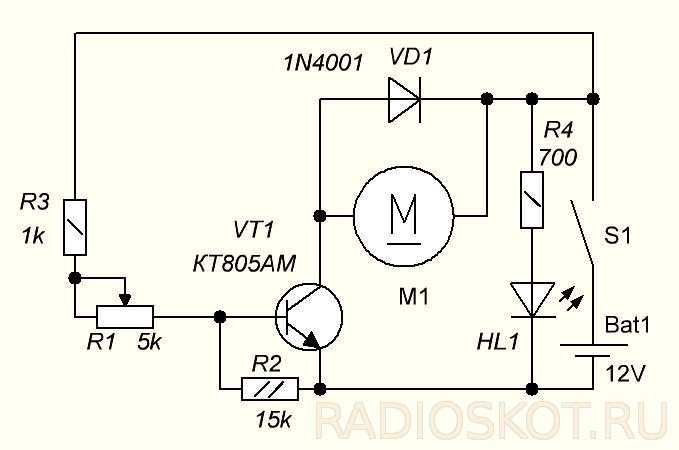 Здесь мы используем таймер 555 в нестабильном режиме или в качестве ШИМ-генератора.
Здесь мы используем таймер 555 в нестабильном режиме или в качестве ШИМ-генератора.
PWM Напряжение, генерируемое таймером 555
№ контакта. 1 микросхемы заземлен. 2 и 6 соединены вместе, аналогично 4 и 8. Конденсатор 220 мкФ сглаживает поступающие 9 вольт.
Сейчас, Резистор 1K , 2 диода 1N4007 , потенциометр 100k и конденсатор 10 нФ образуют RC-цепь зарядки-разрядки, вызывая ШИМ-выход на третьем выводе таймера 555.
Этот выход ШИМ управляет затвором MOSFET. Если вы хотите узнать больше о таймере 555 и о том, как он генерирует волну ШИМ, я предлагаю вам просмотреть множество отличных статей, доступных в Интернете.
Подробнее о таймерах 555 читайте здесь: 555 Таймер подробно
Некоторые проекты таймеров 555 с подробным объяснением: 555 Проекты таймеров
RC-цепь зарядки-разрядки
Наиболее важным аспектом волны ШИМ является ее частота, и вот формула частоты таймера 555 для нее. Вы также можете рассчитать частоту выхода ШИМ с помощью онлайн-калькуляторов.
Вы также можете рассчитать частоту выхода ШИМ с помощью онлайн-калькуляторов.
| Частота = 1,44 / (R1+2 × R2) × C1 HZ |
Скачать 555 Timer DataStept DataShate PlameSte Plamer Calculator: 555. значение R1 (1 кОм), емкость (около 7 нФ из-за допуска и других факторов) и значение потенциометра, которое составляет примерно 91 кОм в моем случае в формуле дает нам частоту 1100Гц.
Теперь, конечно, это не точно из-за нескольких других факторов, влияющих на схему. Фактическая частота составляет 1,3 кГц, что является почти постоянной величиной от 0 до 100% рабочего цикла выхода ШИМ.
Этот выход ШИМ управляет затвором MOSFET , подключенным через резистор 33 Ом. IRF3205S может выдерживать ток до 110 ампер при правильной системе охлаждения и достаточном напряжении затвора. Ограничение напряжения между стоком и истоком составляет максимум 55 В. тогда как напряжение от затвора до источника составляет максимум 20 В.
Исток полевого МОП-транзистора заземлен, а сток подключен к одной клемме выхода, а другая клемма к 12 В. Таким образом, двигатель подключается между + ve источника питания 12 В и стоком MOSFET .
Теперь для защиты МОП-транзистора от скачков напряжения, вызванных двигателем, диод Шоттки подключается параллельно двигателю или между стоком и плюсом источника питания 12 В.
Узнайте больше об обратноходовых диодах здесь: Основы обратноходовых диодов
Диоды Шоттки, как правило, предпочтительны для обратноходовых диодов, поскольку они имеют наименьшее прямое падение (~0,2 В, а не >0,7 В для малых токов) и способны быстро реагировать на обратное смещение (при повторном включении катушки индуктивности) или Другими словами, диод Шоттки имеет мгновенное обратное время восстановления, поэтому подходит для высокочастотных применений.
Контроллер скорости двигателя постоянного тока в действии
Контроллер скорости двигателя постоянного тока в действии
Потенциометр управляет скоростью двигателя.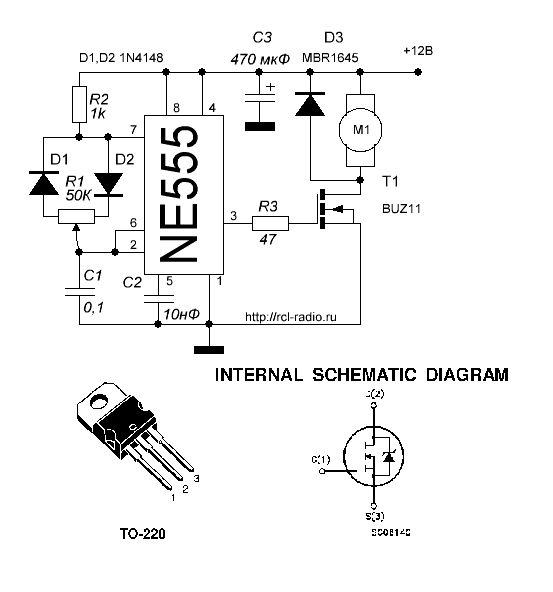 А форма сигнала ШИМ, сгенерированная таймером 555, рисуется на осциллографе. Измерения, такие как рабочий цикл и Vpk-pk тоже можно измерить.
А форма сигнала ШИМ, сгенерированная таймером 555, рисуется на осциллографе. Измерения, такие как рабочий цикл и Vpk-pk тоже можно измерить.
Важные моменты
Для защиты от перенапряжения используйте стабилитрон между затвором и истоком МОП-транзистора, как указано на схеме.
Двигатель, которым я здесь управляю, рассчитан на 12 В и потребляет до 2 А при максимальной нагрузке, что не так уж и много. Следовательно, частота ШИМ 1 кГц здесь подходит, но для больших двигателей частота должна быть выше 15 кГц. А чтобы отрегулировать частоту ШИМ, измените значение потенциометра или конденсатора, чтобы получить желаемую выходную частоту. Так что имейте это в виду при использовании больших нагрузок.
Схема контроллера двигателя беговой дорожки: исчерпывающее руководство
О электрической схеме контроллера двигателя беговой дорожки. Контроллер двигателя является неотъемлемой частью беговой дорожки. Контроллер работает от входной мощности постоянного тока до выходной мощности постоянного тока для работы с двигателем постоянного тока. В основном он работает с двигателем 80-260 В постоянного тока и может позволить пользователю беговой дорожки контролировать скорость ленты.
Контроллер работает от входной мощности постоянного тока до выходной мощности постоянного тока для работы с двигателем постоянного тока. В основном он работает с двигателем 80-260 В постоянного тока и может позволить пользователю беговой дорожки контролировать скорость ленты.
Чтобы лучше понять, как работает последовательный контроллер двигателя, мы должны взглянуть на его силовую схему. Поэтому продолжайте читать, чтобы получить исчерпывающую информацию о схеме контроллера двигателя беговой дорожки.
Содержание
1. Схема контроллера скорости двигателя на основе ШИМ
Две микросхемы 555 могут работать вместе как генератор ШИМ для управления током двигателя, следовательно, работать как датчик скорости двигателя.
Настройка позволяет контроллеру регулировать фактическую скорость двигателя и работать как двунаправленный контроллер двигателя.
Кроме того, его метод управления позволяет использовать предохранительные выключатели для настройки параметров тренажера.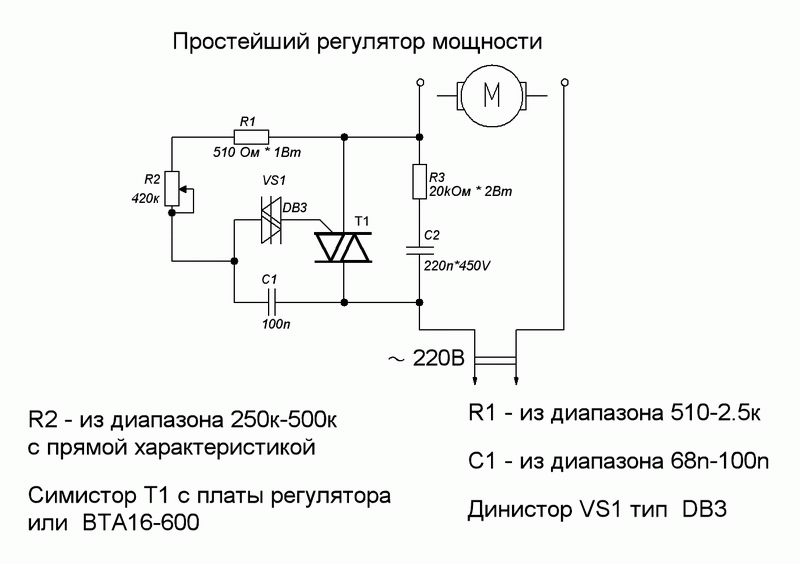
Схема также имеет контроль выходного напряжения; таким образом, он обеспечивает постоянное движение беговой дорожки даже на низких скоростях. Ниже приведена принципиальная схема контроллера двигателя беговой дорожки.
Электрическая схема контроллера двигателя беговой дорожки
В схеме IC1 является генератором частоты 80 Гц. Однако это значение может варьироваться и не вызывает беспокойства.
Частота колеблется от IC1 через контакт три в IC2 через контакт 6. Поскольку IC2 работает как моностабильный в цепи управления, он также отвечает с частотой 80 Гц.
Ответ вызывает аналогичную частоту треугольной волны на контактах 2 и 6 IC2. Немедленно установленный потенциал на выводе 5 микросхемы IC2 сравнивает частотную волну, таким образом прерывая входную мощность на выводе 3.
Потенциометр на четвертом выводе IC2 создает цепь делителя управляющего сигнала, которая позволяет управлять входной мощностью.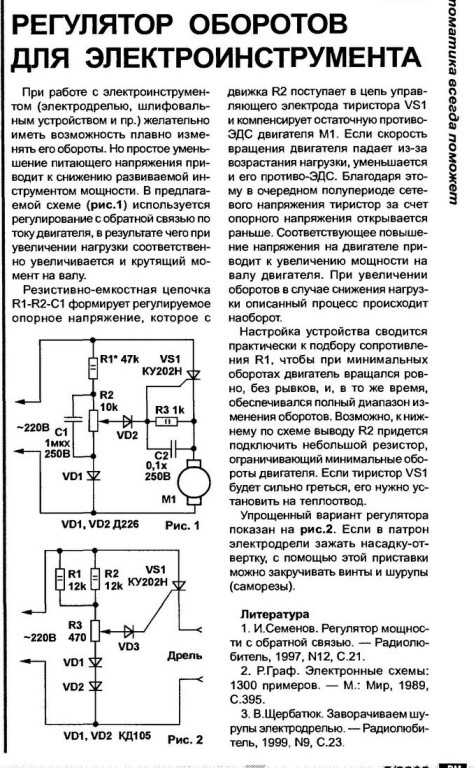 Следовательно, работает как сигнал обнаружения тока для управления двигателем с изменением скорости.
Следовательно, работает как сигнал обнаружения тока для управления двигателем с изменением скорости.
Сигнал управления ШИМ проходит через двухфазные вентили НЕ, которые являются импульсными инверторами, с помощью переключателя SPDT. Таким образом, переключатель необходим, когда пользователю беговой дорожки необходимо изменить направление вращения двигателя или остановить его вращение.
Транзисторы должны иметь тот же номинал, что и ток двигателя в этой цепи. Кроме того, источник питания через мост должен быть равен требованиям к мощности печатной платы двигателя.
Кроме того, вот видео с дополнительной информацией об управлении двигателем беговой дорожки.
2. Упрощенная схема контроллера беговой дорожки
Вы можете использовать альтернативный метод для подключения цепи, чтобы удалить функцию обратного прямого пользовательского управления. Это возможно за счет исключения из схемы нижней платы управления дополнительных компонентов.
Таким образом, принципиальная схема платы контроллера будет выглядеть так, как показано ниже.
Упрощенная электрическая схема контроллера двигателя беговой дорожки
Чтобы включить управление двигателем беговой дорожки, подключите потенциометр 1K к контакту 5 второй микросхемы. Кроме того, добавьте еще один провод заземления на тот же контакт. Кроме того, вы можете добавить потенциометр параллельно C3.
Кроме того, потенциометр 10K работает как датчик скорости двигателя. Точно так же 220 мкФ является сглаживающим конденсатором, который позволяет управлять двигателем при изменении скорости.
Таким образом, уменьшение мощности, подводимой к конденсатору, уменьшает функцию плавного пуска беговой дорожки.
3. Управление через внешний источник питания
Примечательно, что мы можем изменить схему управления коэффициентом мощности, чтобы использовать внешний регулируемый источник питания в качестве управляющего переключателя. Это возможно, управляя контактом 5 IC2 с входной мощностью 0-5 В от нестабильного источника питания.
Это возможно, управляя контактом 5 IC2 с входной мощностью 0-5 В от нестабильного источника питания.
Схема, показывающая, как использовать внешний источник питания в качестве контроллера
Тем не менее, вы можете изменить предыдущую схему приложения с помощью потенциометра 1K на выводе 5 микросхемы IC2. Чтобы уточнить, то есть, если вы не хотите использовать внешний источник питания.
Таким образом, потенциометр позволит вам регулировать управляющий сигнал беговой дорожки. Затем вы даже можете изменить значение C4s, чтобы включить функцию плавного пуска при включении двигателя.
Принципиальная схема, показывающая, как использовать контроллер потенциометра 10K для двигателя беговой дорожки
4. Использование схемы фазового прерывателя диммера
Коммерческие диммеры, такие как в домашних вентиляторах, также могут управлять скоростью двигателя.