Содержание
Схема включения и статические характеристики двигателей постоянного тока с последовательным возбуждением
Особенностью двигателей постоянного тока является то, что ток якоря (ток нагрузки) одновременно является и током возбуждения. Известно, что магнитный поток зависит от тока возбуждения по нелинейному закону.
Схема включения двигателя постоянного тока с последовательным возбуждением.
Зависимость магнитного потока от тока возбуждения в двигателе постоянного тока с последовательным возбуждением.
Чтобы определить зависимость между скоростью вращения и током якоря аппроксимируем нелинейную зависимость в линейную.
Фδ = a·Iв = a·Iа
a = tg α
Подставим формулу электромеханической характеристики в уравнение.
ω = [U / (CM·a·Iа)] – [Rа / (CM·a)]
M = CM·a·Iа2
Iа = √[M / (CM·a)]
ω = [U / √(CM·a·M)] – [Rа / (CM·a)]
Прежде чем построить электромеханическую и механическую характеристики этого двигателя, проведем анализ формул электромеханической и механической характеристик. При токе якоря, стремящемся к нулю и моменту двигателя, стремящемся к нулю, угловая скорость ω стремится к бесконечности. Отсюда ось скорости будет являться асимптотой и электромеханической и механической характеристик двигателя.
При токе якоря, стремящемся к нулю и моменту двигателя, стремящемся к нулю, угловая скорость ω стремится к бесконечности. Отсюда ось скорости будет являться асимптотой и электромеханической и механической характеристик двигателя.
Рассмотрим второй случай: Ток якоря Iа стремится к бесконечности, момент стремится к бесконечности, следовательно:
ω = -[Rа / (CM·a)] = ωа
Линия ωа будет представлять собой вторую асимптоту и электромеханической и механической характеристик.
Электромеханическая и механическая характеристики двигателя постоянного тока с последовательным возбуждением.
Ток короткого замыкания и момент короткого замыкания превышают номинальные значения примерно в 10 раз, поэтому работа в этой точке приведет к разрушению двигателя.
Особенностью характеристик двигателя с последовательным возбуждением состоит в том, что при токе якоря, близком к нулю, и моменте, близком к нулю, скорость двигателя стремиться к бесконечности, начинается разнос двигателя.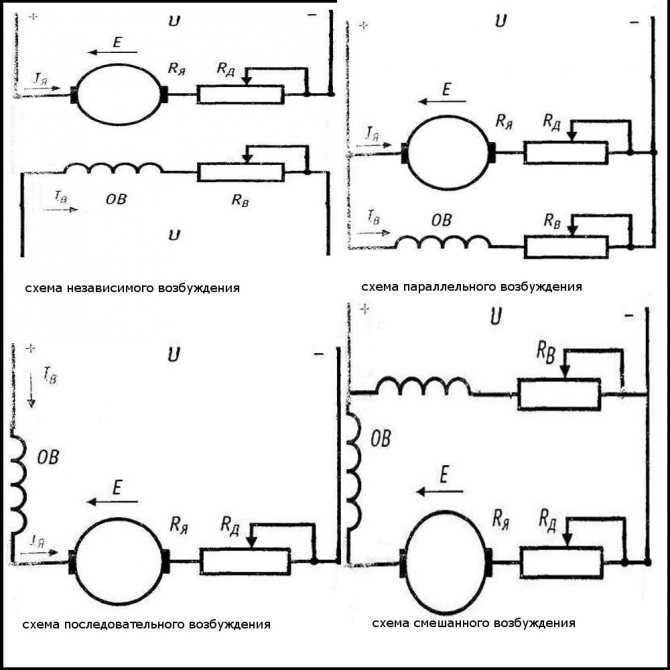 А так как характеристики не пересекают ось скорости, у двигателя постоянного тока отсутствует точка холостого хода.
А так как характеристики не пересекают ось скорости, у двигателя постоянного тока отсутствует точка холостого хода.
Двигатели постоянного тока последовательного возбуждения можно применять только для тех электроприводов, у которых отсутствует режим холостого хода, то есть их нельзя приводить в действие при отсутствии нагрузки на валу.
Если рассмотреть энергетические режимы работы электродвигателей, то у двигателей постоянного тока с последовательным возбуждением отсутствует режим рекуперативного возбуждения, то есть режим работы генератора параллельно с сетью. Это связано с тем, что ЭДС двигателя меньше напряжения сети, из чего следует, что характеристика не может перейти во второй квадрант.
Как видно из характеристики, режим короткого замыкания возможен теоретически, но недопустим практически, так как ток короткого замыкания и момент короткого замыкания настолько велики, что приводят к разрушению электрической машины.
https://www. ros-telematika.ru gps трекеры для автомобилей.
ros-telematika.ru gps трекеры для автомобилей.
Двигатель постоянного тока с параллельным возбуждением (независимым): принцип работы
Характеристики двигателя постоянного тока с параллельным возбуждением
Формула общего тока, идущего от источника, выводится согласно первому закону Кирхгофа и имеет вид: I = Iя + Iв, где Iя — ток якоря, Iв – ток возбуждения, а I – ток, который двигатель потребляет от сети. Следует отметить, что при этом Iв не зависит от Iя, т.е. ток возбуждения не зависит от нагрузки. Величина тока в обмотке возбуждения меньше тока якоря и составляет примерно 2-5% от сетевого тока.
В целом, данные электродвигатели отличаются следующими весьма полезными тяговыми параметрами:
- Высокая экономичность (поскольку ток якоря не проходит через обмотку возбуждения).
- Устойчивость и непрерывность рабочего цикла при колебаниях нагрузки в широких пределах (т.к. величина момента сохраняется даже в случае изменения числа оборотов вала).
При недостаточном моменте пуск осуществляется посредством перехода на смешанный тип возбуждения.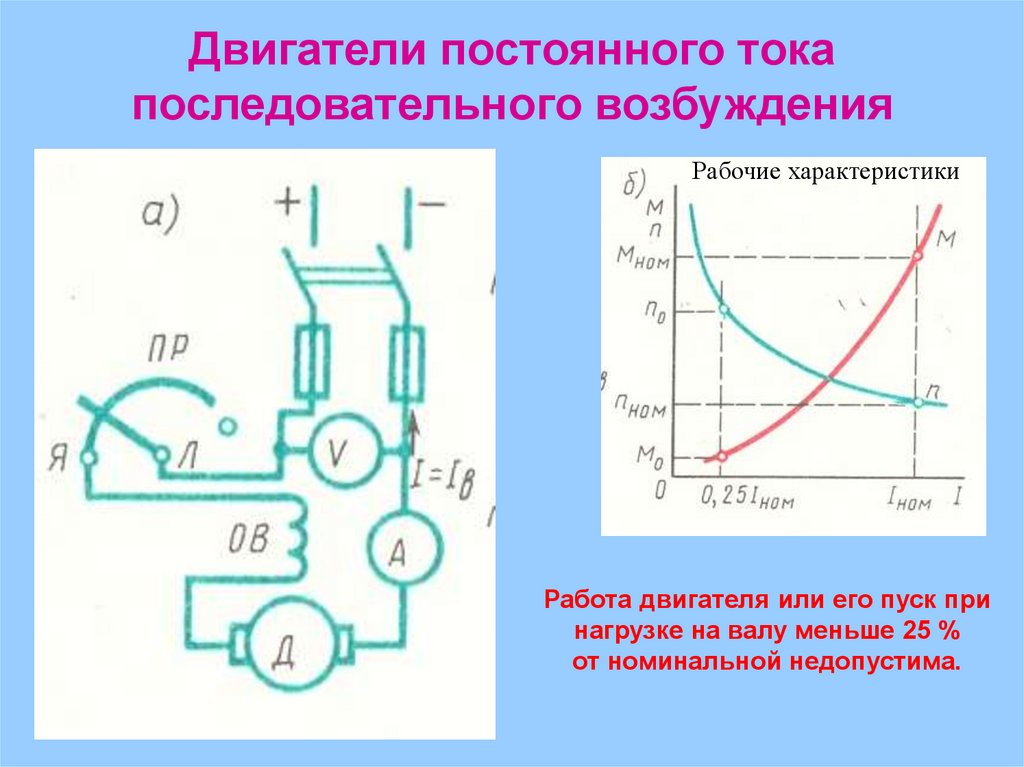
Сферы применения двигателя
Поскольку частота вращения подобных двигателей остается почти постоянной даже при изменении нагрузки, а также может изменяться при помощи регулировочного реостата, они широко применяются в работе с:
- вентиляторами;
- насосами;
- шахтными подъемниками;
- подвесными электрическими дорогами;
- станками (токарными, металлорежущими, ткацкими, печатными, листоправильными и пр.).
Таким образом, этот вид двигателей в основном используется с механизмами, требующими постоянства скорости вращения или ее широкой регулировки.
Регулирование частоты вращения
Регулирование скорости – это целенаправленное изменение скорости электродвигателя в принудительном порядке при помощи специальных устройств или приспособлений. Оно позволяет обеспечить оптимальный режим работы механизма, его рациональное использование, а также уменьшить расход энергии.
Существует три основных способа регулирования скорости двигателя:
- Изменение магнитного потока главных полюсов.
 Осуществляется при помощи регулировочного реостата: при увеличении его сопротивления магнитный поток главных полюсов и ток возбуждения Iв уменьшаются. При этом увеличивается число оборотов якоря на холостом ходу, а также угол наклона механической характеристики. Жесткость механических характеристик сохраняется. Однако увеличение скорости может привести к механическим повреждениям агрегата и к ухудшению коммутации, поэтому не рекомендуется увеличивать частоту вращения этим методом более чем в два раза.
Осуществляется при помощи регулировочного реостата: при увеличении его сопротивления магнитный поток главных полюсов и ток возбуждения Iв уменьшаются. При этом увеличивается число оборотов якоря на холостом ходу, а также угол наклона механической характеристики. Жесткость механических характеристик сохраняется. Однако увеличение скорости может привести к механическим повреждениям агрегата и к ухудшению коммутации, поэтому не рекомендуется увеличивать частоту вращения этим методом более чем в два раза. - Изменение сопротивления цепи якоря. К якорю последовательно подключается регулировочный реостат. Скорость вращения якоря уменьшается при увеличении сопротивления реостата, а наклон механических характеристик увеличивается. Регулировка скорости вышеуказанным способом:
 Осуществляется при помощи регулировочного реостата: при увеличении его сопротивления магнитный поток главных полюсов и ток возбуждения Iв уменьшаются. При этом увеличивается число оборотов якоря на холостом ходу, а также угол наклона механической характеристики. Жесткость механических характеристик сохраняется. Однако увеличение скорости может привести к механическим повреждениям агрегата и к ухудшению коммутации, поэтому не рекомендуется увеличивать частоту вращения этим методом более чем в два раза.
Осуществляется при помощи регулировочного реостата: при увеличении его сопротивления магнитный поток главных полюсов и ток возбуждения Iв уменьшаются. При этом увеличивается число оборотов якоря на холостом ходу, а также угол наклона механической характеристики. Жесткость механических характеристик сохраняется. Однако увеличение скорости может привести к механическим повреждениям агрегата и к ухудшению коммутации, поэтому не рекомендуется увеличивать частоту вращения этим методом более чем в два раза.- способствует уменьшению частоты вращения относительно естественной характеристики;
- связана с большой величиной потерь в регулировочном реостате, следовательно, неэкономична.
- Безреостатное изменение подаваемого на якорь напряжения. В этом случае необходимо наличие отдельного источника питания с регулируемым напряжением, например, генератора или управляемого вентиля.
 В этом случае необходимо наличие отдельного источника питания с регулируемым напряжением, например, генератора или управляемого вентиля.
В этом случае необходимо наличие отдельного источника питания с регулируемым напряжением, например, генератора или управляемого вентиля.Двигатель с независимым возбуждением
Двигатель постоянного тока независимого возбуждения как раз и реализует третий принцип регулирования скорости. Его отличие в том, что обмотка возбуждения и магнитное поле главных полюсов подключаются к разным источникам. Ток возбуждения является неизменной характеристикой, а магнитное поле меняется. При этом изменяется число оборотов вала на холостом ходу, жесткость характеристики остается прежней.
Таким образом, принцип работы дпт с независимым возбуждением является достаточно сложным вследствие независимой работы двух источников, тем не менее, его главное преимущество – большая экономичность.
Рабочие характеристики
Рабочие характеристики представляют собой зависимости потребляемой мощности P1, потребляемого тока I, скорости n, момента M, и к. п. д. η от полезной мощности P2 при U = const и неизменных положениях регулирующих реостатов. Рабочие характеристики двигателя параллельного возбуждения малой мощности при отсутствии добавочного сопротивления в цепи якоря представлены на рисунке 5.
п. д. η от полезной мощности P2 при U = const и неизменных положениях регулирующих реостатов. Рабочие характеристики двигателя параллельного возбуждения малой мощности при отсутствии добавочного сопротивления в цепи якоря представлены на рисунке 5.
Одновременно с увеличением мощности на валу P2 растет и момент на валу M. Поскольку с увеличением P2 и M скорость n несколько уменьшается, то M ∼ P2 / n растет несколько быстрее P2. Увеличение P2 и M, естественно, сопровождается увеличением тока двигателя I. Пропорционально I растет также потребляемая из сети мощность P1. При холостом ходе (P2 = 0) к. п. д. η = 0, затем с увеличением P2 сначала η быстро растет, но при больших нагрузках в связи с большим ростом потерь в цепи якоря η снова начинает уменьшаться.
Источник: Вольдек А. И., «Электрические машины. Учебник для технических учебных заведений» – 3-е издание, переработанное – Ленинград: Энергия, 1978 – 832с.
Преимущества и недостатки
Из достоинств комбинированных моторов стоит выделить:
- высокие показатели регулировок;
- хороший уровень крутящего момента даже на низких оборотах двигателя;
- точность регулировки, низкая вероятность выхода из-под контроля;
- минимальные потери магнетизма со временем;
- почти линейные и механические параметры регулировки, которые обеспечивают удобство эксплуатации;
- высокий уровень также пускового момента, который способствует быстрому запуску мотора, обладающего таким приводом. Причем, в любых условиях окружающей среды;
- компактность габаритов. Особенно эта особенность касается конструкций устройств с постоянными магнитами;
- возможность применения единого механизма для работы в режиме генератора и двигателя;
- коэффициент полезного действия при работе на максимальных нагрузках, в среднем на 1-3% выше, чем у силовых агрегатов синхронного и асинхронного типа конструкции. Если же нагрузка частичная, тогда показатель может увеличиваться до 15%.
 Причем, в любых условиях окружающей среды;
Причем, в любых условиях окружающей среды;По мере того, как совершенствуется конструкция моторов, расширяется их преимущества также расширяются.
Есть и недостатки, серди которых стоит выделить основной – это высокая рыночная стоимость по сравнению с другими модификациями. Обслуживание также стоит на порядок выше, ведь предотвращать износ конструктивных деталей нужно чаще. Хотя современные инженерные решения помогают исправлять эти недостатки.
Прямой пуск
Из всех электродвигателей постоянного тока основная градация при выборе способа их запуска должна учитывать мощность устройства.
В целом выделяют три вида пуска:
- малой мощности;
- средней;
- большой мощности.
Для прямого запуска подойдут только маломощные электродвигатели, которые потребляют до 1кВт электроэнергии в сети. При прямых запусках электродвигателя все напряжение сразу подается на рабочую обмотку. Это обуславливает возникновение максимального пускового тока из-за отсутствия естественной компенсации за счет ЭДС противодействия.
С физической точки зрения ситуация в обмотках ротора будет выглядеть следующим образом: в момент подачи напряжения сила тока в обмотках равна нулю, поэтому его значение будет определяться по формуле:
I = U/Rобм, где
U – приложенная к выводам номинальное напряжение, Rобм – сопротивление катушки.
В этот момент величина токовой нагрузки электродвигателя постоянного тока является максимальной, он может отличаться от номинального значения в 1,5 – 2,5 раза. После этого протекание тока обуславливает генерацию ЭДС противодействия, которая компенсирует пусковую нагрузку до установки номинальной мощности, тогда ток станет:
I = (U — Eпрот)/Rобм
В мощных устройствах сопротивление обмоток якоря может равняться 1 или 0,5 Ом, из-за чего ток при запуске электродвигателя может достигнуть 200 – 500 А, что в 10 – 50 раз будет превышать допустимые величины.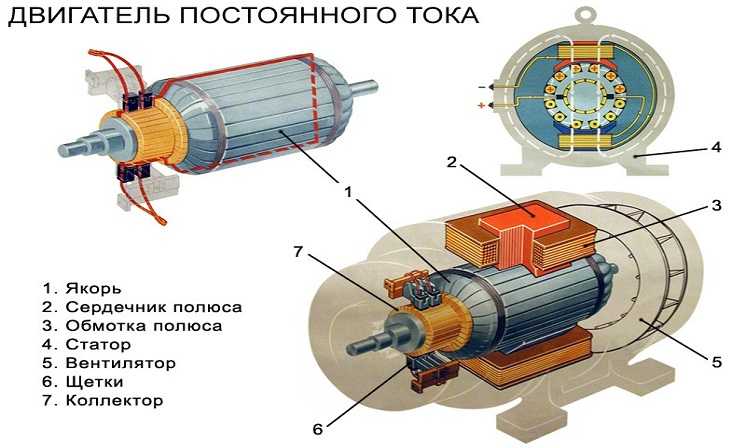 Это, в свою очередь, может привести к термическому отпуску металла, деформации проводников, разрушению колец или щеток скользящего контакта. Поэтому двигатели постоянного тока средней и большой мощности должны вводиться в работу реостатным запуском или путем подачи заведомо пониженного напряжения, прямой пуск для них крайне опасен.
Это, в свою очередь, может привести к термическому отпуску металла, деформации проводников, разрушению колец или щеток скользящего контакта. Поэтому двигатели постоянного тока средней и большой мощности должны вводиться в работу реостатным запуском или путем подачи заведомо пониженного напряжения, прямой пуск для них крайне опасен.
Основные характеристики
Ниже представлена принципиальная схема включения электрического двигателя со смешанным возбуждением. Здесь имеют место две обмотки возбуждения:
- параллельная или шунтовая (ШО). Она подключается параллельно якорным цепям;
- последовательная или сериесная (СО). Соединяется последовательно электрической цепи якоря.
Принципиальная схема двигателя смешанного возбуждения
Как мы уже писали ранее – эти две обмотки могут быть подключены согласованно (параллельно) или встречно.
Когда имеет место согласованный метод, магнитодвижущие силы (МДС) складываются и генерируемый поток Ф равняется сумме потоков, которые создаются этими двумя обмотками.
Скоростная характеристика рассчитывается по такой формуле: n = f (la), при условии, что U = Uном и Iв = const. Iв – уровень тока, от параллельной обмотки.
Когда показатель нагрузки возрастает, тогда магнитный поток также увеличивается (при согласованном соединении). При этом, степень такого возрастания будет меньшей, по сравнению с силовым агрегатом последовательного подключения.
Соотношение между показателем МДС обмоток может варьироваться в широких диапазонах. Моторы, у которых последовательность обмотки слабая, обладают такой же слабо падающей скоростной характеристикой. Визуально это изображается так:
Скоростные параметры двигателя
Чем больше уровень обмотки для магнитодвижущей силы, тем точнее скоростные параметры приближаются к характеристикам мотора последовательного срабатывания.
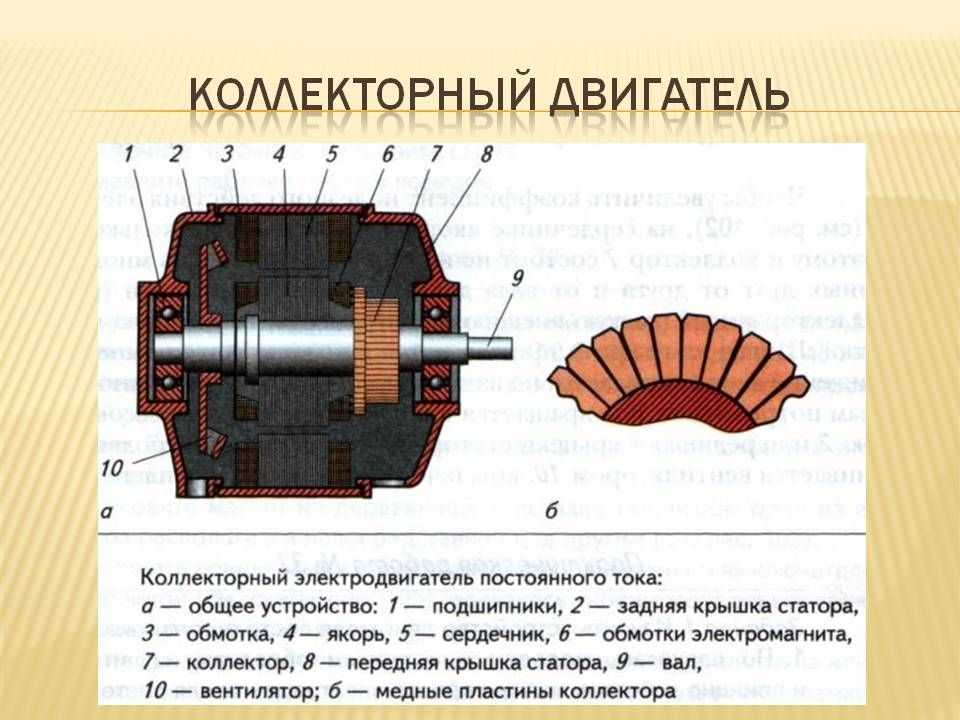
Особенности конструкции
Электродвигатель, работающей от сети с неизменной токовой величиной (ДПТ), как и асинхронный или синхронный двигатель с изменяемым напряжением электропитания, содержит два основных блока: неподвижный статор (или индуктор) и вращающийся якорь (или ротор). Статор обеспечивает формирование основного магнитного поля. Его структурная схема содержит:
Статор обеспечивает формирование основного магнитного поля. Его структурная схема содержит:
- станину, выполненную из литой стали;
- главные полюсы, осуществляющие формирование основного магнитного поля;
- дополнительных полюсов, обеспечивающие хорошую коммутацию.
Стальная станина служит надежным основанием электромотора, на котором крепятся все неподвижные элементы. Она также выступает структурным звеном магнитопровода. Главный полюс состоит из шихтованного сердечника, закрепленного на основании болтовым соединением, и катушек цепи. Его изготовляют в массиве или набирают из электротехнической стали. Для формирования требуемого распределения магнитных силовых линий сердечник оснащается полюсным наконечником. В отдельных местах производят двигатель постоянного тока с распределенными компенсационными электропроводами, размещаемыми в пазах сердечников.
Электроцепи главного полюса конструктивно выполняются в виде сосредоточенных катушек и могут питаться либо от сетевого источника, либо от зажимов якорной обмотки. Двигатели постоянного тока с центальным подключением к электропитанию и являются ДПТ независимого возбуждения. Добавочные полюсы аналогично главным содержат индукционные сосредоточенные катушки и сердечник, выполненный в виде массивного цельного изделия.
Двигатели постоянного тока с центальным подключением к электропитанию и являются ДПТ независимого возбуждения. Добавочные полюсы аналогично главным содержат индукционные сосредоточенные катушки и сердечник, выполненный в виде массивного цельного изделия.
Устройство подвижной части электропривода – якоря – предусматривает применение:
- зубчатого сердечника, выполненного из листовой электротехнической стали;
- коллектора, собранного из изолированных друг от друга клинообразных медных пластин.
В пазы на лицевой поверхности зубчатого сердечника укладывается электроцепь ротора и коллектора, насаженного на роторный вал. Коллекторный механизм – это полое изделие цилиндрической формы. Соединение проводов якоря с коллекторным блоком производится к каждой медной пластине двумя концами отдельных частей роторной электрообмотки.
На коллекторе, в щеткодержателях размещаются неподвижные щетки, посредством которых роторные проводники соединяются с центральной электрической цепью. Таким образом обеспечивается независимое возбуждение тяговых двигателей. Щеткодержатель представляет собой щеточный аппарат с траверсой, на котором закреплены щеточные пальцы. Траверса крепится к стационарной части и допускает поворот на некоторый угол вокруг оси вала для регулирования положения щеток.
Таким образом обеспечивается независимое возбуждение тяговых двигателей. Щеткодержатель представляет собой щеточный аппарат с траверсой, на котором закреплены щеточные пальцы. Траверса крепится к стационарной части и допускает поворот на некоторый угол вокруг оси вала для регулирования положения щеток.
Коллекторные двигатели постоянного тока симметричны и обладают либо вертикальной, либо горизонтальной осью симметрии. Первая проходит посередине главных полюсов, вторая – межполюсного пространства. Поперечная ось носит название геометрической нейтрали приводного агрегата.
Существует и другой тип электродвигателя – вентильно — приводный механизм или бесколлекторный электропривод. Его отличие состоит в замене щеточно-коллекторного узла на полупроводниковый коммутатор. Это позволяет получать практические достоинства: высокий КПД, надежность, широкий диапазон мощности, пожарную безопасность.
Как управлять скоростью и направлением двигателя постоянного тока
Двигатель постоянного тока — это устройство, которое преобразует электрическую энергию в механическую.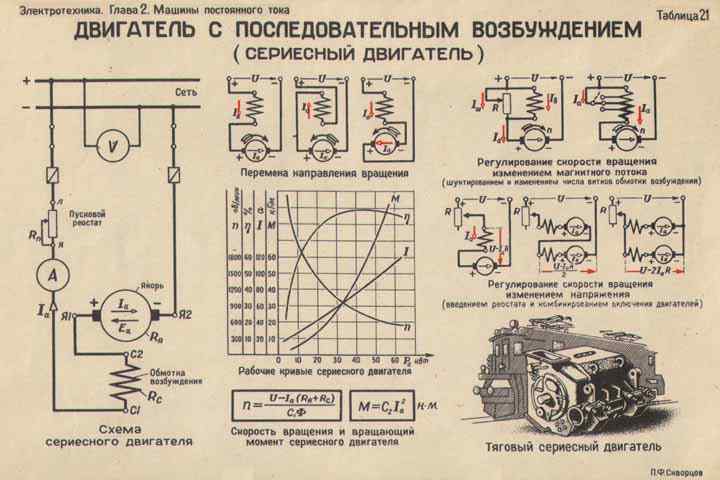 Сегодня вы найдете двигатели постоянного тока во многих устройствах, на которые мы полагаемся каждый день, таких как бытовая и офисная техника, автомобили, системы контроля доступа и игрушки. В этом уроке мы рассмотрим основные принципы работы двигателей постоянного тока и покажем вам, как управлять скоростью двигателя с помощью ШИМ, Н-мостовой схемы и L29.3D драйвер двигателя.
Сегодня вы найдете двигатели постоянного тока во многих устройствах, на которые мы полагаемся каждый день, таких как бытовая и офисная техника, автомобили, системы контроля доступа и игрушки. В этом уроке мы рассмотрим основные принципы работы двигателей постоянного тока и покажем вам, как управлять скоростью двигателя с помощью ШИМ, Н-мостовой схемы и L29.3D драйвер двигателя.
Как работают двигатели постоянного тока
На провод с током в присутствии магнитного поля действует механическая сила, действующая в определенном направлении.
Чтобы определить фокус этой силы, сэр Джон Амброуз Флеминг разработал простой способ, который использует левую руку, чтобы визуализировать взаимосвязь между потоком тока, направлением магнитного поля и направлением силы. Этот простой, но очень эффективный метод стал известен как правило левой руки Флеминга.
Правило левой руки Флеминга
В двигателе постоянного тока вал соединен с проволочной катушкой, через которую проходит ток. Есть также круглые магниты, окружающие проволочную катушку. Когда на двигатель подается питание, ток течет через проволочную катушку, а магнитное поле заставляет катушку вращаться и поворачивать вал.
Есть также круглые магниты, окружающие проволочную катушку. Когда на двигатель подается питание, ток течет через проволочную катушку, а магнитное поле заставляет катушку вращаться и поворачивать вал.
Свойства двигателей постоянного тока
При выборе двигателя постоянного тока необходимо учитывать несколько характеристик, определяющих электрические свойства двигателя. В том числе:
- Напряжение: Вы можете найти двигатели постоянного тока, работающие от 1,5 В до 100 В.
- Крутящий момент: Крутящий момент — это сила вращения, которую производит двигатель (в ньютон-метрах). Двигатели постоянного тока для хобби могут варьироваться от 2,8 г-см до 58 кг-см.
- Начальный крутящий момент: Максимальный крутящий момент, развиваемый двигателем, чтобы начать вращательное движение нагрузки. Двигатели постоянного тока имеют высокий пусковой момент.
- Скорость двигателя: Скорость вращения двигателя в оборотах в минуту (об/мин). Типичные скорости холостого хода для двигателей постоянного тока находятся в диапазоне от 1 до 20 000 об/мин.
 Типичные скорости холостого хода для двигателей постоянного тока находятся в диапазоне от 1 до 20 000 об/мин.
Типичные скорости холостого хода для двигателей постоянного тока находятся в диапазоне от 1 до 20 000 об/мин.Как управлять скоростью двигателя с помощью ШИМ
Скорость двигателя постоянного тока прямо пропорциональна напряжению питания. Простым способом управления скоростью двигателя постоянного тока является регулирование напряжения питания с помощью широтно-импульсной модуляции (ШИМ).
Широтно-импульсная модуляция (ШИМ)
Основная идея ШИМ заключается в том, что она очень быстро включает и выключает напряжение питания. Регулируя длину импульсов ВКЛ/ВЫКЛ, мы можем установить напряжение в диапазоне от 0 В до максимального напряжения. Мы будем использовать этот ШИМ-сигнал для прямого питания двигателя.
ШИМ-драйвер двигателя
Существует несколько способов генерации ШИМ-сигнала для двигателя, но в этом руководстве мы будем использовать таймер 555. Вот схема этой цепи:
555 Нестабильный мультивибратор с таймером для управления двигателем постоянного тока
Выход таймера 555 включает и выключает транзистор Q1. Конденсатор С1 заряжается и разряжается через резисторы R1 и R3. Время зарядки или разрядки конденсатора зависит от номиналов резисторов R1 и R3. Как только конденсатор заряжается, он быстро разряжается через диод D2 и переменный резистор RV1 на вывод 7. В процессе разрядки выход таймера 555 падает до 0 В и отключает транзистор. Поворот переменного резистора регулирует скорость двигателя.
Конденсатор С1 заряжается и разряжается через резисторы R1 и R3. Время зарядки или разрядки конденсатора зависит от номиналов резисторов R1 и R3. Как только конденсатор заряжается, он быстро разряжается через диод D2 и переменный резистор RV1 на вывод 7. В процессе разрядки выход таймера 555 падает до 0 В и отключает транзистор. Поворот переменного резистора регулирует скорость двигателя.
Драйвер двигателя H-Bridge
Типичный двигатель постоянного тока имеет два соединительных провода — один для отрицательной клеммы, а другой — для положительной клеммы. Если вы поменяете местами эти клеммы (изменив полярность), двигатель будет вращаться в противоположном направлении. Конечно, есть лучшие способы управления направлением двигателя постоянного тока без постоянной смены клемм.
Для этого мы можем использовать схему H-Bridge. Схема H-Bridge получила свое название от четырех транзисторов, которые выглядят как буква «H». Схема Н-моста обеспечивает управление двигателем в обоих направлениях за счет использования различных комбинаций переключателей (S1-S4). В реальном сценарии мы используем транзисторы вместо обычных переключателей.
В реальном сценарии мы используем транзисторы вместо обычных переключателей.
Простой Н-мост
Принцип работы этой схемы прост. У нас есть четыре переключателя, S1-S4. Если мы откроем S2 и S3 и закроем S1 и S4, ток будет течь по часовой стрелке от VCC к земле. Теперь, чтобы поменять полярность двигателя, мы открываем S1 и S4 и замыкаем S2 и S3. Теперь двигатель постоянного тока вращается в противоположном направлении.
Вот схема схемы управления направлением вращения двигателя H-Bridge:
Конфигурация транзистора H-Bridge. BW1 и BW2 управляют обратным направлением двигателя, а FW1 и FW2 реверсируют двигатель постоянного тока.
Драйвер двигателя L293D
Как следует из названия, драйвер двигателя L293D предназначен для управления двигателями постоянного тока. L293D — это популярная ИС драйвера двигателя со встроенной схемой Н-моста, которая может одновременно управлять двумя двигателями постоянного тока. Он может подавать ток до 1 А и напряжение от 4,5 В до 36 В.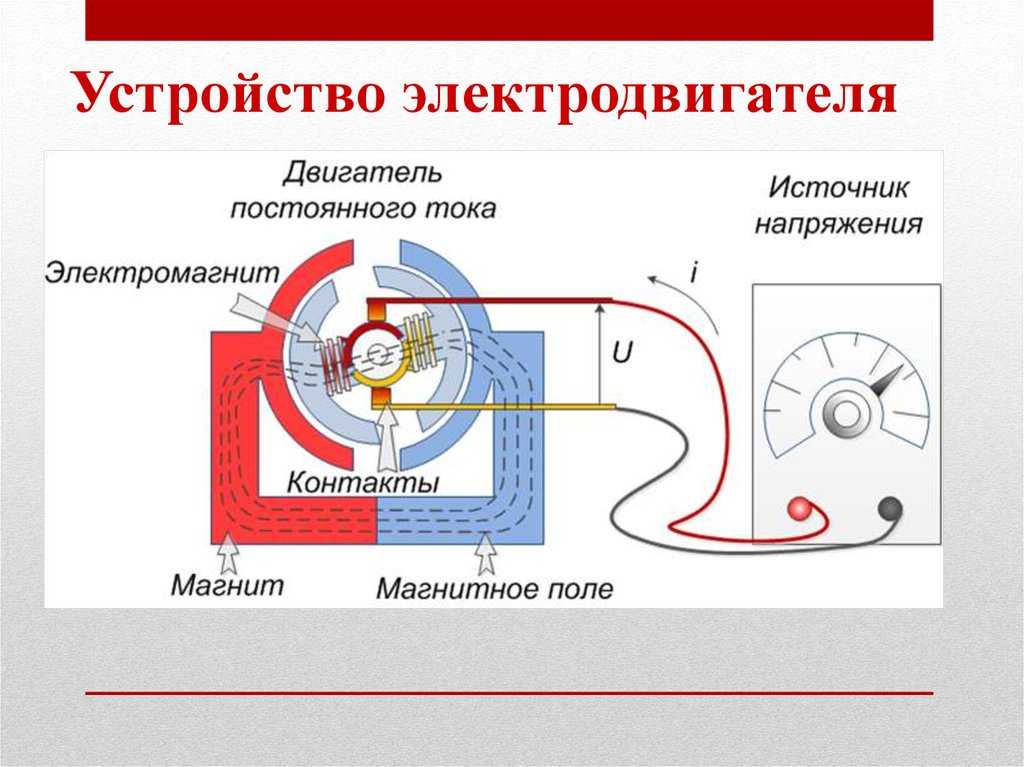
Это означает, что моторный привод L293D идеально подходит для создания платформ многоколесных роботов. Вот схема L293D, показывающая, как подключать двигатели:
Схематическая диаграмма L293D controlling two DC motors
L293D Pin Descriptions
| L293D Pin | Description |
| 1 (Enable 1-2) | Controls the left part of the driver |
| 2 (Вход-1) | Контакт входа сигнала |
| 3 (Выход-1) | Подключается к одной из клемм двигателя |
| 4 и 5 | Заземление | Подключается к одной из клемм двигателя |
| 7 (Вход-2) | Контакт входа сигнала |
| 8 (Vcc2) | Напряжение питания двигателя должно быть выше чем 4,5 В |
| 9 (enable3-4) | Управляет правой частью драйвера |
| 10 (Вход-3) | Входной штифт |
| 11 (Выход-3) | |
| 11 (Выход-3) | |
| 11 (Выход-3) | |
| 11 (Outupt к одному из выводов двигателя | |
| 12 и 13 | Заземление |
| 14 (выход-4) | Подключается к одной из терминалов мотора |
| 15 (вход-4) | Источник питания |
 16 Vss
16 VssНадеюсь, эта статья помогла вам лучше понять, как использовать двигатели постоянного тока в ваших электронных проектах! Оставьте комментарий ниже, если у вас есть какие-либо вопросы.
Схема привода двигателя постоянного тока
Схемы привода двигателя постоянного тока могут быть упакованы в небольшие модули, подобные изображенной здесь плате.
Моторные приводы, как следует из названия, используются для привода двигателей и управления их скоростью, а также направлением вращения. ИС драйвера двигателя представляют собой базовые усилители тока, которые отвечают за подачу требуемой мощности на двигатель. Однако термин «моторный привод» может также в совокупности относиться к общей системе, предназначенной для управления движением различных двигателей. Эти системы также могут быть построены из отдельных компонентов, особенно когда требуются более высокие мощности.
В этой статье мы рассмотрим схемы привода двигателя на системном уровне, где компоненты привода интегрированы в одну систему с двигателем и схемой управления. Сама секция драйвера обычно представляет собой мостовую схему с определенной конфигурацией привода; мы рассмотрим эти конфигурации вождения в этой статье.
Схемы и системы привода двигателей объединяют несколько компонентов в единый блок или узел. На самом высоком уровне моторные приводы включают в себя набор функциональных блоков, показанных на схеме ниже.
Часть микроконтроллера срабатывает, когда задающая схема начинает работать, и она может обрабатывать данные, полученные от задающей схемы, если есть какая-либо обратная связь по положению или скорости (например, с резольвером двигателя). Схема драйвера включает в себя все схемы, необходимые для возбуждения схемы драйвера, хотя возбуждение может обеспечиваться микроконтроллером, если схема драйвера может запускаться на логических уровнях. Это может иметь место в схемах драйвера двигателя MOSFET со средней выходной мощностью.
Топология привода двигателя постоянного тока по схеме Н-моста
Наиболее распространенной топологией схемы привода двигателя постоянного тока является схема Н-моста. Эта схема показана ниже, и ее Н-образная топология дала ей название. Двигатели постоянного тока могут работать как по часовой стрелке, так и против часовой стрелки с использованием H-моста, контролируя направления управляющих токов в каждом из полевых МОП-транзисторов в цепи.
МОП-транзисторы являются наиболее распространенными компонентами, используемыми для реализации конструкции Н-моста. Включение Q1 и Q4 заставляет двигатель работать в одном направлении, в то время как замыкание Q2 и Q3 заставляет двигатель двигаться в противоположном направлении. Та же схема драйвера может работать с широтно-импульсной модуляцией (ШИМ), что позволяет динамически управлять скоростью во время работы.
Альтернативные приводы двигателей с контроллерами
Схема привода H-Bridge состоит из электронных компонентов, которые соединяют ШИМ или аналогичные входы цифрового управления с затворами MOSFET. Он выполняет две основные функции:
Он выполняет две основные функции:
- Управление затворами путем преобразования входных напряжений в соответствующие уровни.
- Подайте достаточное количество тока для быстрой зарядки и разрядки ворот.
Кроме того, некоторые схемы управления имеют другие функции, такие как:
- Режимы привода определяют, как входная команда преобразуется в сигналы для управления воротами.
- Включает дополнительные функции безопасности, такие как защита от перегрузки по току
- Отрегулируйте продолжительность включения и выключения полевых транзисторов.
Общие схемы контроллера драйвера приведены в таблице и на изображении ниже. Здесь стоит упомянуть, что все МОП-транзисторы, используемые на стороне низкого напряжения, являются N-канальными, но на стороне высокого напряжения могут использоваться как P-канальные, так и N-канальные устройства.
Драйвер нижней стороны | Созданы специально для привода Q2 или Q4 в описанном выше Н-мосте |
Драйвер верхней стороны | Созданы специально для управления Q1 или Q3 в описанном выше Н-мосте |
Драйвер полумоста | Состоит из одного драйвера нижнего плеча и верхнего плеча, которые работают в тандеме для управления транзисторами Q1 и Q2 (или Q3 и Q4). |
Драйвер полного моста | Состоит из двух драйверов верхнего и нижнего плеча, которые могут совместно управлять всеми четырьмя полевыми МОП-транзисторами |

Проблемы проектирования драйверов двигателей с Н-образным мостом
Хотя процесс проектирования драйверов двигателей на основе Н-моста может показаться простым на первый взгляд, он не лишен трудностей. Это может произойти либо на этапе проектирования схемы, либо на этапе разработки прошивки. В схеме Н-моста полевые транзисторы включаются и выключаются по диагонали, но это переключение не может происходить одновременно между всеми полевыми транзисторами.
Dead Time: Всегда будет момент времени, когда все транзисторы будут открыты. Если верхний и нижний выключатели включены, произойдет кратковременная потеря напряжения и мощности или, возможно, короткое замыкание. Мертвое время может быть реализовано, чтобы предотвратить это.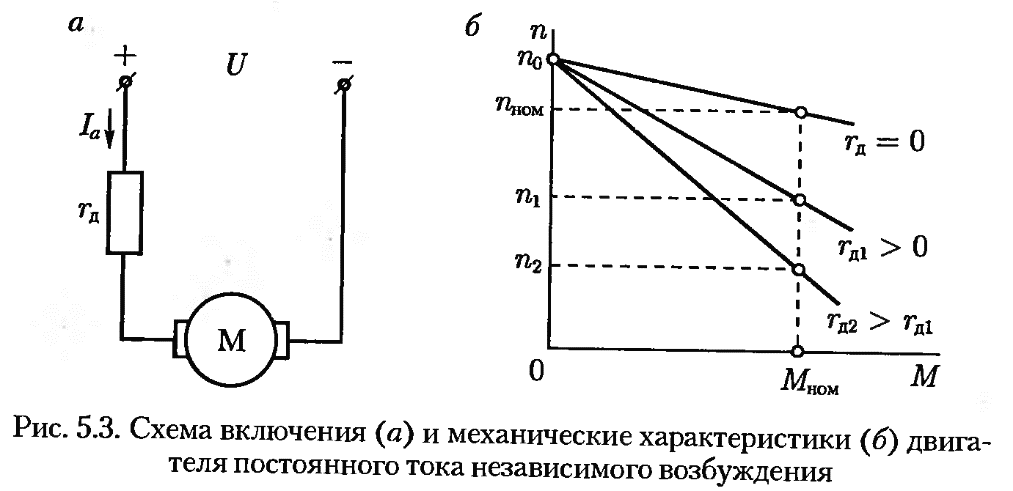 Это короткое время, в течение которого все полевые транзисторы H-моста включены. Мертвое время позволяет программисту отложить размыкание самого верхнего переключателя до тех пор, пока не будет замкнут самый нижний.
Это короткое время, в течение которого все полевые транзисторы H-моста включены. Мертвое время позволяет программисту отложить размыкание самого верхнего переключателя до тех пор, пока не будет замкнут самый нижний.
Частота ШИМ. Еще одним важным элементом, который необходимо правильно задать при проектировании драйвера двигателя, является частота ШИМ. Больше мощности будет потеряно на более низких частотах и наоборот. Однако, если частота ШИМ слишком высока, микроконтроллер может с трудом обеспечить необходимый сигнал ШИМ при требуемом смещении. Кроме того, драйвер затвора и транзисторные ключи могут выйти из строя из-за несовместимости с очень высокой частотой. В прошивке должна быть установлена правильная частота ШИМ, чтобы гарантировать правильную работу контроллера мотора.
Электромагнитные помехи: Наконец, экстремальные электромагнитные помехи также являются проблемой, которая может возникнуть с некоторыми типами двигателей, такими как коллекторные двигатели постоянного тока. Это вызвано частым переключением коммутатора, что может вызвать шум в соседних компонентах. В экстремальных случаях проводимые токи могут повредить близлежащие компоненты. Фильтры и ферриты часто используются для экранирования кабелей, которые могут улавливать эти электромагнитные помехи, особенно на более низких частотах, где будет сосредоточена большая часть мощности.
Это вызвано частым переключением коммутатора, что может вызвать шум в соседних компонентах. В экстремальных случаях проводимые токи могут повредить близлежащие компоненты. Фильтры и ферриты часто используются для экранирования кабелей, которые могут улавливать эти электромагнитные помехи, особенно на более низких частотах, где будет сосредоточена большая часть мощности.
Выбор полевого МОП-транзистора для цепей управления двигателем H-Bridge
МОП-транзисторы должны иметь некоторые важные характеристики, если они будут использоваться в схемах привода двигателя:
- Способность работать с высоким напряжением и током
- Низкое сопротивление в открытом состоянии
- Минимально возможная индуктивность выводов
Для повышения допустимой нагрузки по току МОП-транзисторов, используемых в схемах привода двигателя, эти компоненты часто размещают последовательно.
Индуктивность выводов и разводка печатной платы важны для определения общей индуктивности на пути привода. Во время запуска чрезмерная индуктивность может привести к недостаточно затухающим колебаниям в цепи возбуждения, что может привести к повреждению или выходу из строя полевых МОП-транзисторов. В результате на полевых МОП-транзисторах требуется некоторая защита от переходного напряжения. Это может быть так же просто, как диод TVS и небольшой резистор, включенный последовательно с затвором, и диод с быстрым восстановлением должен быть подключен к двигателю.
Во время запуска чрезмерная индуктивность может привести к недостаточно затухающим колебаниям в цепи возбуждения, что может привести к повреждению или выходу из строя полевых МОП-транзисторов. В результате на полевых МОП-транзисторах требуется некоторая защита от переходного напряжения. Это может быть так же просто, как диод TVS и небольшой резистор, включенный последовательно с затвором, и диод с быстрым восстановлением должен быть подключен к двигателю.
Когда вы будете готовы к проектированию и моделированию схем привода двигателей постоянного тока, убедитесь, что вы используете лучшие в отрасли инструменты проектирования схем и моделирования в PSpice от Cadence. Пользователи PSpice могут получить доступ к мощному симулятору SPICE, а также к специальным возможностям проектирования, таким как создание моделей, инструменты построения графиков и анализа и многое другое.
Подпишитесь на нашу рассылку, чтобы быть в курсе последних обновлений. Если вы хотите узнать больше о том, какое решение у Cadence есть для вас, поговорите с нашей командой экспертов.