Основное применение аппаратной платформы Arduino – это конструирование роботов, во всяком случае, начинается знакомство с данной аппаратной платформой, как правило, именно с этого. Ходовая часть большинства колесных роботов [1] оснащается электромоторами, которые представляют собой мощную нагрузку, прямое подключение которой к портам Arduino может вызвать только выход из строя последней. Для подключения нагрузки потребляющей большой ток можно использовать самодельные релейные схемы или транзисторные ключи [2], а можно приобрести готовый драйвер для подключения электродвигателей на Ru.aliexpress.com

Устройство поставляется в обычном антистатическом пакете.

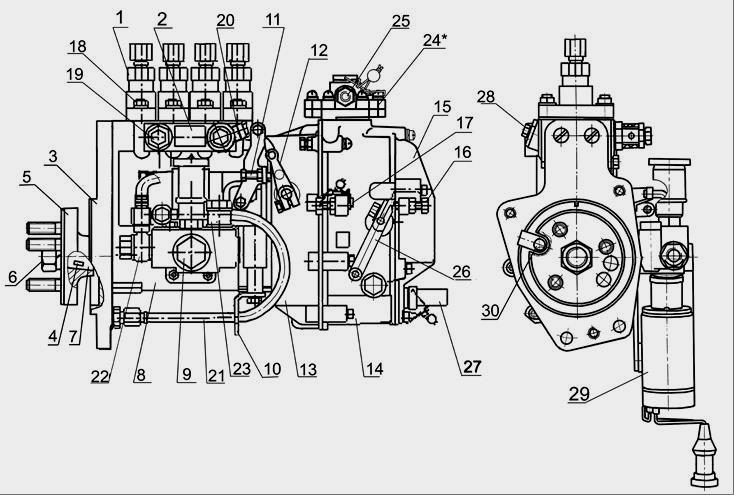
Модуль представляет собой печатную плату размером 43 х 43 мм, на которой установлена микросхема радиаторе, высота которого составляет 24 мм, масса 25 г.


Данное устройство позволяет одновременно управлять парой маломощных низковольтных электродвигателей постоянного тока. По заявлениям продавца максимально допустимый общий ток, которым можно нагрузить драйвер составляет 2 А на канал, а максимальная мощность двигателей ограничена 20 Вт. На плате хорошо видна пара двухклемных колодок для подключения электромоторов и трехклемная колодка для подачи напряжения питания.
Устройству требуется два напряжения питания 5-35 В для электродвигателей и 5 В для электронной части. При подаче питания на плате загорается индикатор подачи напряжения питания. При питания от напряжении ниже 12 В (автор проверял при 6 В), отдельный источник питания для электронной части можно не подключать.
На плате рядом с клеммой питания имеется перемычка, которую необходимо снять в случае раздельного питания силовой и электронной части [3-6]. Все колодки промаркированы с тыльной стороны платы.

Для управления нагрузкой плата драйвера имеет 6 информационных входов.

Входы IN1, IN2 задают направление вращения одного двигателя, а другая пара IN3, IN4, соответственно другого. Если на одном из входов пары присутствует низкий логический уровень, а на другом высокий, то ротор двигателя вращается в одну сторону, а если, сигналы поменяются на противоположные, то направление вращения также сменится. Если на оба входа подать низкий логический уровень, то двигатель будет остановлен. Как понимает автор, подача высокого логического уровня на оба выхода пары одновременно не допустима [7].

Если управление парой двигателей осуществляется только по четырем проводам, то двигатель развивает максимально допустимую мощность (программа L298N_1, взята из [5]). Скачать файл

Для управления мощностью двигателей предусмотрены входы ENA и ENB. ENA привязан к IN1, IN2, а ENB регулирует мощность двигателя, управляемого через IN3, IN4. В простейшем случае, когда нет необходимости в регулировании оборотов двигателя, эти входы замкнуты перемычками на шину питания. Для управления скоростью вращения электромоторов используется ШИМ [8-10], соответственно необходимо подключать к данным входам драйвера те порты Arduino, которые поддерживают данный режим. При этом для управления одним двигателем в данном режиме понадобится три порта Arduino (программа L298N_2, взята из [5]).

Как говорилось выше драйвер двигателей L298N позволяет аналогично управлять двумя двигателями, при этом, разумеется, в совокупности понадобится задействовать 6 портов Arduino.

Для демонстрации работы модуля код программ взят из [5], но следует отметить, что в примере, который демонстрирует работу пары электромоторов, допущена ошибка при назначении портов управления ENA и ENB (исправленный вариант L298N_3).
Для подключения драйвера к Arduino UNO были использованы проводники с гнездами на обоих концах. Длина проводов 10 см, эти соединительные провода были приобретены тоже на Али.

Также данное устройство можно использовать для управления шаговым двигателем [11].
В целом это отличный и недорогой способ управления ходовой частью робота. Своих денег устройство однозначно стоит. Обзор подготовил специально для "Радиосхем" - Denev.
Форум
Обсудить статью ДРАЙВЕР НИЗКОВОЛЬТНЫХ ЭЛЕКТРО ДВИГАТЕЛЕЙ
radioskot.ru
Данный универсальный драйвер двигателя постоянного тока на L298 является драйвером, содержащий два H-моста. Это позволяет управлять двумя двигателями постоянного тока или одним биполярным шаговым двигателем (с 4-я проводами). Наиболее важным преимуществом данной схемы является управление большим диапазоном напряжения (до 46 В) и током до 2 А в постоянном режиме, 3 А в кратковременном.
Принципиальная электрическая схема драйвера двигателя постоянного тока представляет собой типовое подключение микросхемы L298.

Быстрые диоды Шоттки защищают от скачков напряжения. Модуль драйвера оснащен стабилизатором напряжения на 78M05 (U2) для питания L298. О его наличии указывает светодиод «PWR».
Светодиоды LED2….LED5 сообщают о работе и направлении вращения подключенного двигателя. Запуск двигателя осуществляется путем подачи логической 1 на соответствующий разъем EN и необходимой комбинацией "0" и "1" на выводы IN1…IN4.
Пример управляющих сигналов для управления двумя двигателями представлен в таблице 1, а в таблице 2 показано как управлять шаговым двигателем.
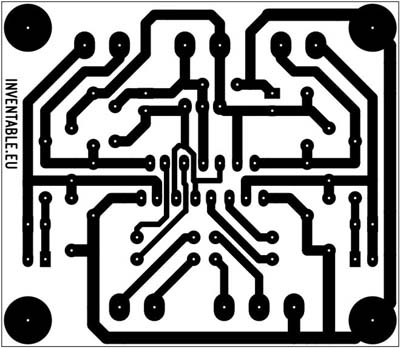
Драйвер выполнен на двухсторонней печатной плате с использованием элементов поверхностного монтажа. Монтаж является типичным и не требует специального описания.
Следует иметь в виду, чтобы схема питания была оборудована радиатором, а также важным является тот факт, что корпус микросхемы L298 внутренне подключена к массе.
 Скачать рисунок печатной платы (12,1 Kb, скачано: 908)
Скачать рисунок печатной платы (12,1 Kb, скачано: 908)
www.joyta.ru
Бытовая техника
Главная ![]() Радиолюбителю
Радиолюбителю ![]() Бытовая техника
Бытовая техника
Простой драйвер для шагового двигателя
Порой встает вопрос о том, как бы управлять шаговым двигателем. Как правило, это нужно осуществить, при проектировании какой-нибудь самоделки или более серьезного проекта, например станка с числовым программным управлением. Естественно, такое управление можно купить. Но, драйвер для шагового двигателя из принтера также можно сделать. Это будет самый простой вариант, который наглядно продемонстрирует возможность управлять этим устройством.
Понадобится старый принтер или сканер, можно неработающий. Оттуда, собственно, и будет извлечен шаговый двигатель, если такового нет в наличии. Также из платы потребуется выпаять управляющую микросхему под названием ULN2003. Она может быть и другая, в разной технике стоят различные микросхемы. Подойдут её аналоги: TD62003, отечественная К1109КТ22, более популярная MC1413, L203 и SG2003.
В принципе, подойдут и собратья этих микросхем, такие как ULN2023A, ULN2803 и им подобные. Стоит только смотреть даташиты. Микросхемы можно купить или выпаять из подобной техники. При выпаивании стоит быть осторожными, так как такие электронные компоненты извлекаются сложнее, и есть угроза повреждения их ножек.
Схема подключения
Схема подключения проста.

Потребуется приобрести разъем DB-25, который будет подключаться к порту компьютера, для управления двигателем, в случае, если конструируется ЧПУ станок. Диапазоны входного напряжения указаны для конкретно этой микросхемы. Остальные микросхемы, возможно, потребуют отличного от этого напряжения питания.В качестве источника питания отлично подойдет компьютерный блок питания. В принципе, подойдет любое зарядное или БП, напряжением от 12В до 24В, с током от 350мА. Стоит отметить, что желательно обладать технической документацией к модели используемого двигателя, что упростит его подключение к драйверу.
Сам драйвер выглядит так:

В случае если документация не найдена на двигатель, то попробовать найти шины питания требуется в первую очередь. Сделать это можно, как наугад, с возможностью спалить микросхему, так и используя батарейку, к примеру, если двигатель рассчитан на небольшое напряжение.
Если конструкция делается для станка с ЧПУ, то на компьютер потребуется скачать программу Turbo CNC и настроить её под свои нужды.
Дата публикации: 30.11.2017
Мнения читателейНет комментариев. Ваш комментарий будет первый.
Вы можете оставить свой комментарий, мнение или вопрос по приведенному вышематериалу:
www.radioradar.net
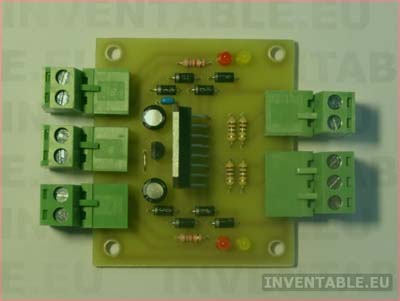
Не так давно мы опубликовали статью о том «Как работает H-мост для двигателей постоянного тока». Сегодня представляем вашему вниманию блок управления двумя двигателями постоянного тока с малым напряжением питания. Схема, которая может быть использована для строительства небольших роботов, собрана на интегральной микросхеме L298.
Ниже фото упрощенной версии драйвера для двигателей постоянного тока на L298 без радиатора.

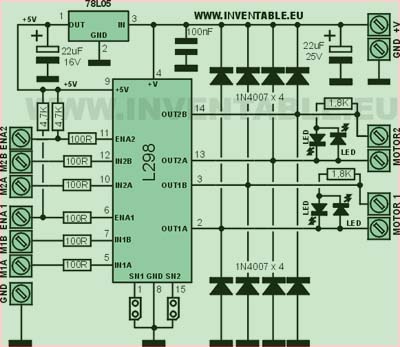
Микросхема L298 — это фактически двойной интегрированный силовой H-мост. Ранее мы рассмотрели теоретическую сторону использования H-моста. Сегодня займемся практической стороной этого вопроса – построим драйвер для 2-х двигателей постоянного тока. Принципиальная схема такого драйвера показана на следующем рисунке:
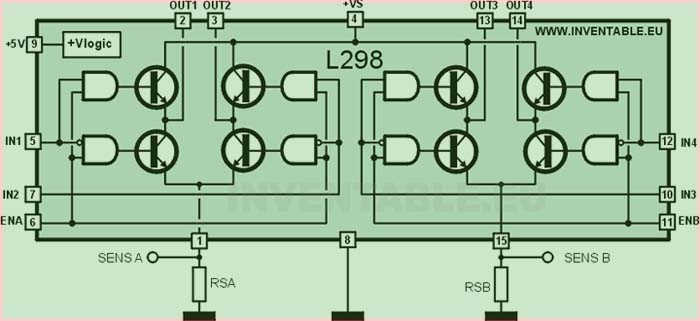
Каждый H-мост состоит из 4 силовых транзисторов, подключенных к логическим элементам «И», чьи выводы обеспечивают управление двигателями в обоих направлениях.
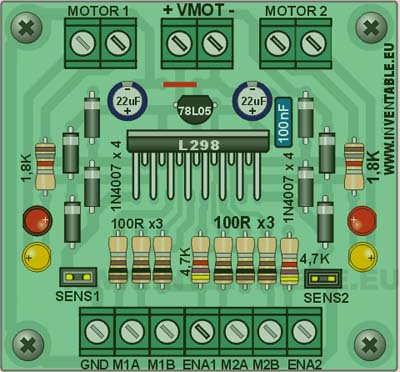
Драйвер управления двигателями разработан в двух вариантах: первый — упрощенный для обычных устройств, второй вариант для специализированного применения.
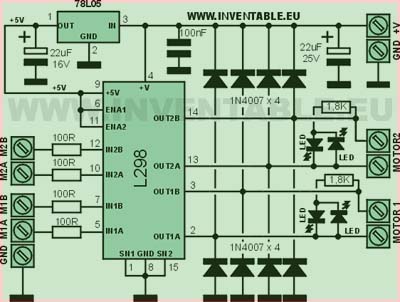

Фактически разница между ними минимальна. У второго варианта есть дополнительные контакты для подключения датчиков тока и две клеммы для включения/выключения моста. В упрощенной же версии мосты всегда включены, а минусовые выводы (1 и 15) связаны непосредственно с землей.
Драйвер L298 может работать с напряжением до 46 В и токами до 2 А на канал (всего 4А) в непрерывном режиме, хотя лучше не превышать общую мощность. С двигателями мощностью более 10 Вт лучше всего установить радиатор, как показано на фотографии.
Давайте проанализируем работу электронных схем драйверов в двух версиях. Помимо микросхемы L298 в схемах использованы несколько дополнительных компонентов. Логической части L298 требуется источник питания на 5В, и поэтому использован стабилизатор напряжения 78L05, который является маломощным вариантом классического 7805. Стабилизатор 78L05 обеспечивает максимальный выходной ток до 100 мА, что более чем достаточно для наших целей.
Для того чтобы визуально отслеживать направление вращения каждого двигателя, в схеме использованы два светодиода (красный и желтый), соединенные встречно-параллельно. На схеме мы также можем видеть 8 диодов для защиты от выбросов ЭДС самоиндукции.
Для этих диодов лучшим выбором будут диоды Шоттки, особенно, в случае если мы используем драйвер для управления двигателями средней мощности или управляем частотой вращения двигателя с помощью ШИМ (широтно-импульсная модуляция). В простых же схемах — диодов типа 1N4007 будет достаточно.
Управляющие входы обеих версий работают с логикой 5В (TTL), хотя мы можем без проблем управлять сигналами управления на 3,3В. Резисторы, с сопротивлением 100 Ом на входах, служат только для защиты и могут быть заменены перемычками из проволоки.
Ниже в таблицах истинности мы видим логику управления. У упрощенной модели есть два управляющих входа для каждого двигателя (MA и MB), в то время как в полной версии у нас еще есть вход разрешения (ENA).


С нашем случае на данные входы не нужно дополнительно подавать сигнал, поскольку к ним уже подключены подтягивающие резисторы по 4,7кОм. Для того чтобы отключить мост, нам просто необходимо снизить напряжение до 0 В.
Полная версия драйвера включает в себя два H-моста, которые управляют двигателями, измеряя ток потребления. Если эта функция не нужна, вы можете просто установить перемычки. Если же нам необходимо контролировать ток потребляемый двигателями, то необходимо на место перемычек установить шунтирующие резисторы и подключить соответствующую измерительную систему между контактами.
Есть некоторые причины, по которым может быть полезно измерять ток двигателей: одна из них заключается в обнаружении чрезмерного потребления тока двигателями, как в случае с мобильными роботами, когда у них блокируются колоса. Другая причина более сложная и заключается в обеспечении обратной связи для высококачественного управления ШИМ.
Как бы там ни было, для их реализации потребуется дополнительная схема для усиления сигнала с шунтирующих резисторов и специальное программное обеспечение для микроконтроллера. Но это уже выходит за рамки данной статьи.
Данная печатная плата также может быть использована для управления шаговым двигателем, но поскольку каждый шаговый двигатель для работы нуждается в двух мостах, мы можем подключить только один двигатель к плате.
www.inventable.eu
fornk.ru