Содержание
Управление шаговым двигателем с помощью LPT порта компьютера
(Ниже описана несложная разработка, позволяющая управлять шаговым двигателем, подключенным к LPT порту
IBM-совместимого компьютера.)
Параллельный порт является великолепным интерфейсом, позволяющим подключать к персональному компьютеру
множество
самых различных устройств. Однако он может быть легко поврежден, поэтому при его использовании для
подсоединения
самодельных внешних устройств нужно быть очень внимательным. Если вы не уверены в том, что вы все делаете
правильно,
сначала проконсультируйтесь у специалистов и только потом экспериментируйте. Ниже приводится краткое
описание
параллельного порта. Параллельный порт имеет несколько линий ввода/вывода, которые могут быть разделены на
две группы
— линии передачи данных и линии сигналов управления. Линии передачи данных — двунаправленные (разумеется,
Линии передачи данных — двунаправленные (разумеется,
речь идет о
режимах ЕСР/ЕРР), и именно их мы и будем использовать. В табл.1 описано назначение выводов разъема порта
LPT.
| № выв. | Назва-ние | Направ-ление | Описание |
|---|---|---|---|
| 1 | STROBE | ввод и вывод | устанавливается PC после завершения каждой передачи данных |
| 2/9 | DO-D7 | вывод | 8 линий данных |
| 10 | АСК | ввод | устанавливается в «0» внешним устройством после приема байта |
| 11 | BUSY | ввод | устройство показывает, что оно занято, путем установки этой линии в «1» |
| 12 | Paper out | ввод | для принтеров |
| 13 | Select | ввод | устройство показывает, что оно готово, путем установки на этой линии «1 » |
| 14 | Autofeed | Ввод и вывод | |
| 15 | Error | ввод | индицирует об ошибке |
| 16 | Initialize | Ввод и вывод | |
| 17 | Select In | Ввод и вывод | |
| 18-25 | Ground | GND | общий провод |
купить шаговый двигатель
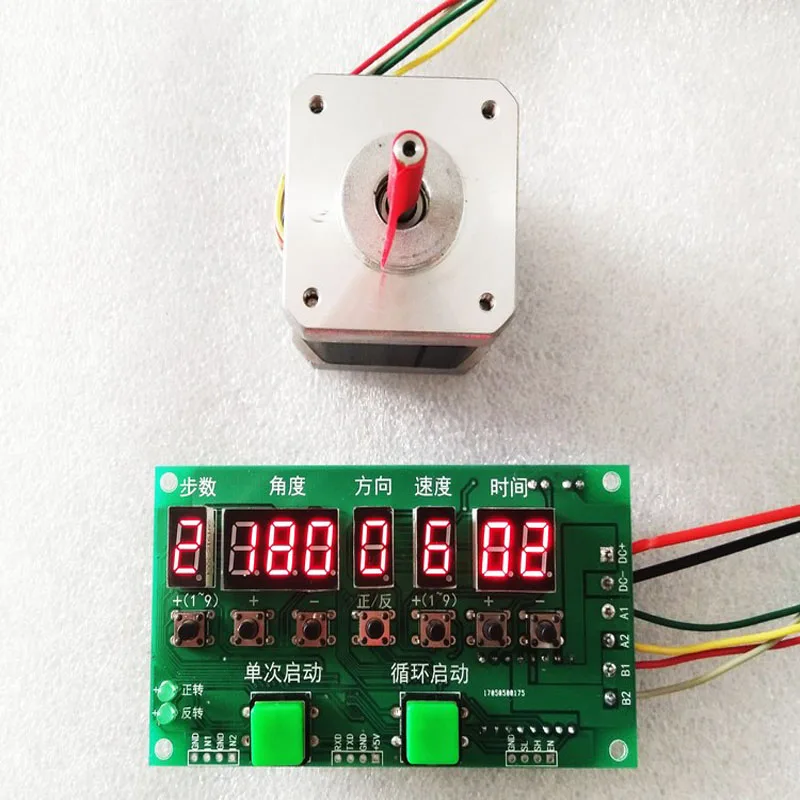
купить блок управления шаговым двигателем
Для эксперимента был использован шаговый двигатель от старого 5,25-дюймового дисковода модели FD-55GFR фирмы Теас. У
У
этого двигателя оказалось пять выводов. В большинстве источников описываются шаговые двигатели, имеющие шесть
выводов.
Существуют также описания 4-выводных шаговых двигателей, у которых не подключены средние выводы и которые
требуют
двухполярного напряжения для управления. Поиск в Интернете дал ответ: этот шаговый двигатель похож нашаговые
двигатели
сшестью выводами, но две обмотки у него соединены в одной точке, и наружу выведен один провод, подсоединенный
к ним. Для
более подробного знакомства с шаговыми двигателями можно посетить страницу в Интернет по адресу:
www.HowStuffWorks.com,
задав поиск для шаговых двигателей (страница на английском языке — прим. переводчика). Процесс извлечения
двигателя из
дисковода несложен — требуется всего лишь отвернуть несколько винтов. К валу двигателя с помощью винтика
прикреплена
тонкая металлическая полоска, нужно соблюдать осторожность, чтобы не порезаться об нее в процессе ее
извлечения.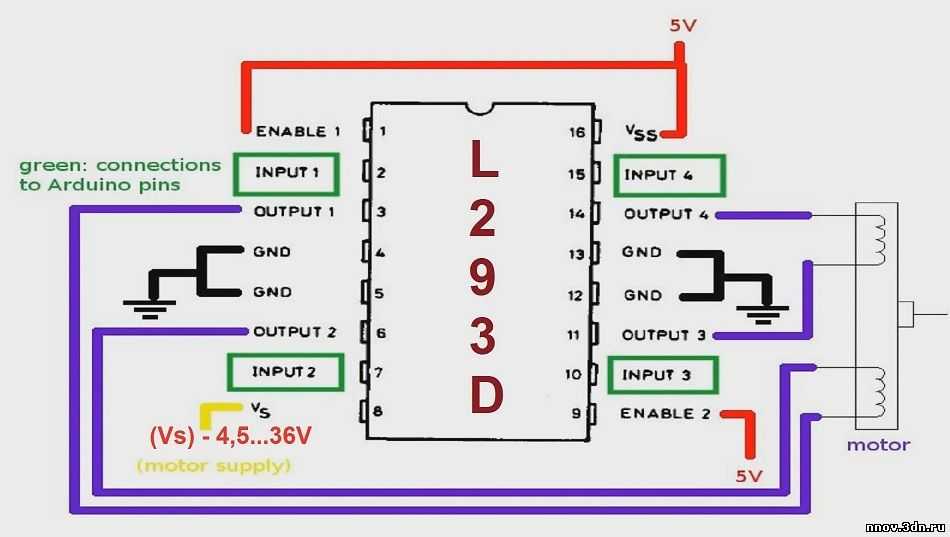 После
После
извлечения шагового двигателя следует убедиться, что он исправен. Простейший способ это сделать — замкнуть все
выводы
двигателя между собой и попробовать повернуть его вал. Вал должен проворачиваться с трудом, по сравнению с
тем, как он
проворачивается при разомкнутых выводах. Также с помощью тестера можно проверить целостность обмоток
двигателя. Выводы
каждой из обмоток следует пометить. Идентифицировать выводы шагового двигателя можно следующим способом:
- Подсоедините вывод любой обмотки двигателя к выводу питания +12 В, а к другому выводу этой обмотки —
общий
провод. Вал должен провернуться на небольшой угол. Пометьте первый вывод цифрой 1. - Оставьте эти два вывода в одном месте. Теперь подключите выводы других обмоток к источнику питания 12
В. Обратите
внимание, что эти два вывода заставляют шаговый двигатель поворачивать вал на небольшой угол в другую
сторону.
Отметьте один из них номером 2, другой — номером 4. - Оставшийся вывод обозначьте номером 3.

Прим. переводчика: я использовал шаговый двигатель от русского дисковода. Тип двигателя: ПБМГ-200-265Ф. Для
определения выводов применялся тестер. При этом я зарисовал схему обмоток, фиксируя на ней измеренные
сопротивления.
Оказалось, что двигатель имеет четыре обмотки. Две обмотки соединены друг с другом и имеют общий провод
белого цвета,
вторые выводы этих обмоток красного и зеленого цвета. Две другие обмотки также соединены друг с другом и
имеют общий
провод черного цвета, вторые выводы этих обмоток голубого и желтого цвета. Если соединить белый и черный
провода,
получается практически та же схема, что и описанная в оригинальной статье. Порядок подключения выводов я
определил
опытным путем.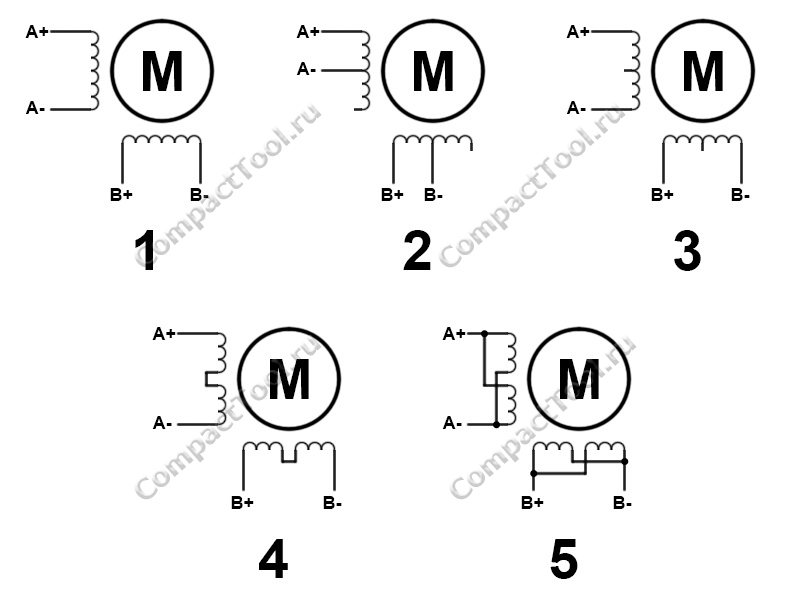
Для управления шаговым двигателем можно использовать микросхему драйвера ULN2003, которая содержит семь
мощных
транзисторных ключей, собранных по схеме Дарлингтона. Каждый ключ способен управлять нагрузкой с током
потребления до
500 мА. Микросхема имеет резисторы в цепи базы, что позволяет напрямую подключить ее входы к обычным
цифровым
микросхемам. Все эмиттеры соединены вместе и выведены на отдельный вывод. На выходах транзисторных ключей
имеются
защитные диоды, что позволяет управлять с помощью этой микросхемы индуктивными нагрузками при минимуме
внешних
компонентов. В нашей конструкции использовано только четыре транзисторных ключа. Электрическая схема
подключения
шагового двигателя показана на рис. 2.
Обратите внимание, что первый вывод шагового двигателя, идентифицированный с помощью описанной ранее
процедуры,
подсоединен к линии DO параллельного порта (разумеется, через микросхему ULN2003). Каждый следующий вывод
Каждый следующий вывод
подсоединен
к соответствующему выводу параллельного порта. Если порядок подключения выводов шагового двигателя неверный,
вал
мотора будет не вращаться, а лишь поворачиваться на небольшой угол из одной стороны в другую и наоборот.
Общий провод
схемы подсоединен к источнику питания не напрямую, а через стабилитрон. Это сделано с целью защиты схемы от
напряжения
ЭДС самоиндукции, возникающего в катушках при резком выключении напряжения питания схемы.
Программа, разработанная для описываемого устройства, достаточно проста. Она управляет выводами порта и
формирует на
них специальную последовательность импульсов. Эта последовательность показана в табл. 2 и 3.
Различие между алгоритмами (полным и половинным углом поворота вала на один шаг) состоит в том, что во
втором случае
скорость вращения оказывается в два раза ниже, при этом в два раза уменьшается угол поворота вала двигателя
на каждом
шаге, т. е. увеличивается разрешающая способность системы. Также во втором случае примерно в два раза
е. увеличивается разрешающая способность системы. Также во втором случае примерно в два раза
увеличивается
потребляемая мощность, и кроме того, двигатель способен развивать в два раза больший крутящий момент.
Для изменения направления вращения вала двигателя необходимо формировать указанные последовательности в
обратном
порядке.
| № шага | DO | D1 | D2 | D3 |
|---|---|---|---|---|
| 1 | 1 | 0 | 0 | 0 |
| 2 | 0 | 1 | 0 | 0 |
| 3 | 0 | 0 | 1 | 0 |
| 4 | 0 | 0 | 0 | 1 |
| № шага | DO | D1 | D2 | D3 |
|---|---|---|---|---|
| 1 | 1 | 0 | 0 | 0 |
| 2 | 1 | 1 | 0 | 0 |
| 3 | 0 | 1 | 0 | 0 |
| 4 | 0 | 1 | 1 | 0 |
| 5 | 0 | 0 | 1 | 0 |
| 6 | 0 | 0 | 1 | 1 |
| 7 | 0 | 0 | 0 | 1 |
| 8 | 0 | 0 | 0 | 1 |
Ниже приведен короткий пример программы для Turbo С, работающей в операционной системе
MS-DOS.
Эта программа заставляет шаговый двигатель вращаться в прямом направлении, в режиме полного угла на
один
шаг.
Перевод с английского Михаила Голубцова.
Подключение шагового двигателя — Страница 3 — Установка и настройка
#41
OFFLINE
crane
Отправлено 22 Июль 2012 — 02:12
Посыпались заказы, вот только разгребся — отрабатывал их на старом шаговике. Вот только руки дошли до замены. А как выставить ток двигателя? И еще снова вопрос по подключению проводов. Новый шаговик с четырьмя проводами: красный, зеленый, желтый, синий. От продавца получил схему (см.прикрепл.изобр). На ней, сверху справа показано, что цвета соответствуют буквам A, B, C, D. Но у меня провода, которые из станка подходили к старому шаговику подписаны цифрами 1,2,3,4.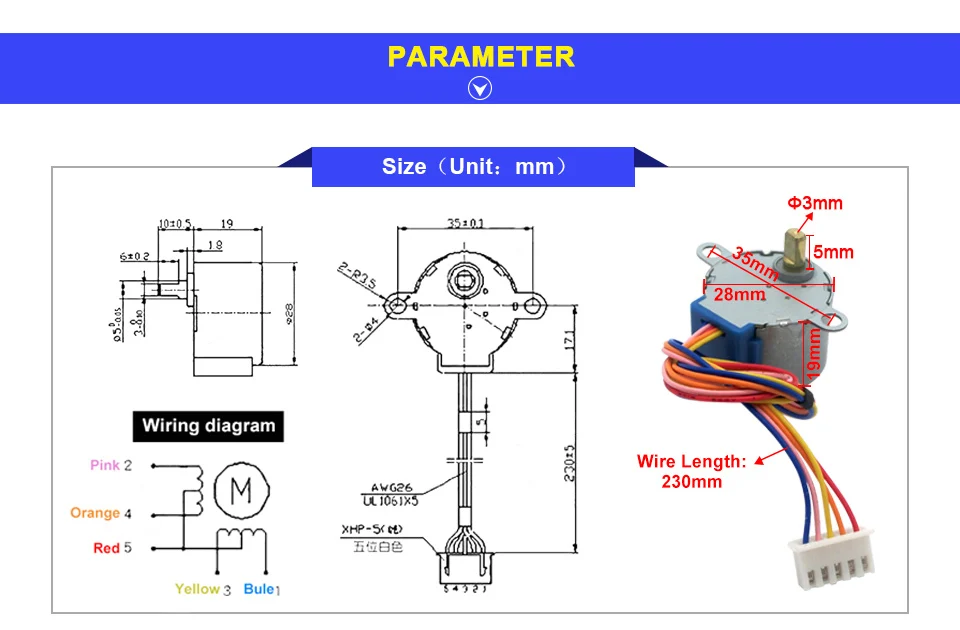 Попытка приравнять цифры последовательности алфавита (1-А, 2-В, 3-С, 4-D) не привела к успеху — шаговик странно гудит и при нажатии на пульте на Y+ и Y- происходит микровращение, причем в одну и ту же сторону — короче, явно что-то не так. Посмотрел на драйвер — увидел, что на него приходят только провода 1,2,3. Если посмотрите на второе фото, то клеммы соответствуют номерам проводов таким образом: YR+ =3 YA+ =1 YA- =2. А желто-зеленый (видимо земляной) провод на YR- он случайно не есть недостающий провод 4?
Попытка приравнять цифры последовательности алфавита (1-А, 2-В, 3-С, 4-D) не привела к успеху — шаговик странно гудит и при нажатии на пульте на Y+ и Y- происходит микровращение, причем в одну и ту же сторону — короче, явно что-то не так. Посмотрел на драйвер — увидел, что на него приходят только провода 1,2,3. Если посмотрите на второе фото, то клеммы соответствуют номерам проводов таким образом: YR+ =3 YA+ =1 YA- =2. А желто-зеленый (видимо земляной) провод на YR- он случайно не есть недостающий провод 4?
В общем, подскажите пожалуйста как мне подсоединить мои несчастные четыре провода?
Добавлю, что до этого стоял шаговик с восемью проводами, которые были подключены так:
1 = Синий и Красный
2 = Желтый и Черный
3 = Белый и Коричневый
4 = Зеленый и Оранжевый
Прикрепленные изображения
Сообщение отредактировал crane: 22 Июль 2012 — 02:14
- Наверх
#42
OFFLINE
vv92
Отправлено 22 Июль 2012 — 02:26
Прозвоните обмотки, должна быть пара А+ А- и В+ В-.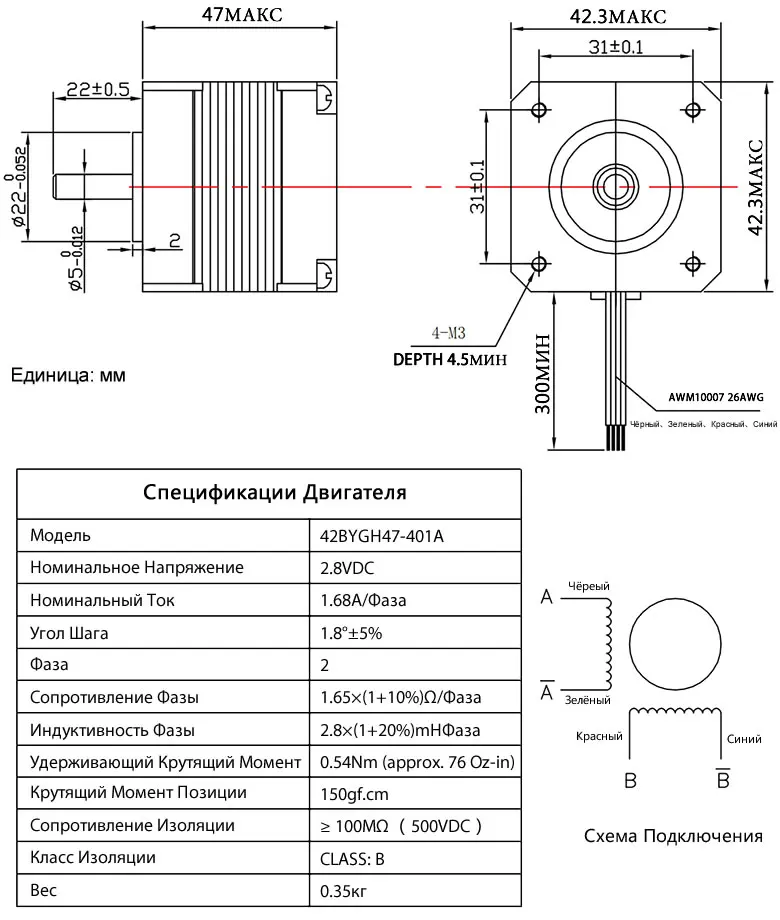 Соответственно подключите к выходу драйвера, если едет в другую сторону, поменяйте местами одну пару проводов ( например А+ и А- местами). Токи желательно выставить по максимому.
Соответственно подключите к выходу драйвера, если едет в другую сторону, поменяйте местами одну пару проводов ( например А+ и А- местами). Токи желательно выставить по максимому.
Знаю технику безопасности как свои три пальца.Эксперт — это существо, которое перестало мыслить, ибо оно знает!В мире еще много граблей, на которые не ступала нога человека.
Пожалуйста! Исправляйте мои глупые ошибки (но оставьте мои умные ошибки)!
- Наверх
#43
OFFLINE
crane
Отправлено 22 Июль 2012 — 02:44
А где же выставить ток (как)? И как определить его максимум?
- Наверх
#44
OFFLINE
vv92
Отправлено 22 Июль 2012 — 02:53
Ток выставляется на драйвере, подбираете соответственно току двигателя.
Знаю технику безопасности как свои три пальца.Эксперт — это существо, которое перестало мыслить, ибо оно знает!В мире еще много граблей, на которые не ступала нога человека.
Пожалуйста! Исправляйте мои глупые ошибки (но оставьте мои умные ошибки)!
- Наверх
#45
OFFLINE
crane
Отправлено 22 Июль 2012 — 03:03
Похоже, что максимум у меня 3А, я прав? — вот описание моего ш.д
http://cnc-spindle.r…p?productID=259
vv92, прошу прощения, но не могу понять, каким образом на драйвере можно что либо выставить? подскажите пожалуйста. И если можно, поясните парой фраз чем грозит или просто делает хуже несоответствие тока, выставленного на драйвере и написанного на ш.д.?
Сообщение отредактировал crane: 22 Июль 2012 — 03:04
- Наверх
#46
OFFLINE
DEDAlex
Отправлено 22 Июль 2012 — 04:27
На драйвере должны быть микропереключатели одни для тока, другие для выставления микрошага.
ДАВНО ЖИВУ-ПРИВЫК УЖЕ…
Самый хороший учитель в жизни — опыт. Берет, правда, дорого, но объясняет доходчиво.
Ничто так не украшает человека, как дружба с собственной головой.
Работать надо не 12 часов, а головой. © Стив Джобс
Только тогда, когда ваши мечты будут сильнее ваших страхов — они начнут сбываться.
Любая достаточно развитая технология неотличима от волшебства (с) Артур Кларк
- Наверх
#47
OFFLINE
анкноун
Отправлено 13 Июнь 2013 — 15:19
Есть китайский шаговик 57BYGH78-401A, цвета проводов-красный,синий,зеленый,черный. Нужно подключить к драйверу,читал,что если неправильно подключить фазировку-то конец придет микросхеме драйвера. Кто знает,какие цвета к каким клеммам=А+,А-,В+,В- ?
- Наверх
#48
OFFLINE
MiG
Отправлено 13 Июнь 2013 — 15:40
- Наверх
#49
OFFLINE
vv92
Отправлено 13 Июнь 2013 — 16:40
Прозвоните и те пары, которые звонятся и будут А-, А+ и В-, В+. Если будет вращаться не в том напрпвлении поменяйте местами провода любой пары.
Если будет вращаться не в том напрпвлении поменяйте местами провода любой пары.
Знаю технику безопасности как свои три пальца.Эксперт — это существо, которое перестало мыслить, ибо оно знает!В мире еще много граблей, на которые не ступала нога человека.
Пожалуйста! Исправляйте мои глупые ошибки (но оставьте мои умные ошибки)!
- Наверх
#50
OFFLINE
анкноун
Отправлено 13 Июнь 2013 — 16:55
Спасибо всем. Насчет прозвонки..-меня пугает инфа о том,что если неправильно соединить,может полететь микросхема драйвера TB6600. Ну вот-на рисунке показаны по цветам, ато я не мог даташит найти на этот моторчик.
- Наверх
#51
OFFLINE
vv92
Отправлено 13 Июнь 2013 — 18:55
Если пугает-звоните обязательно.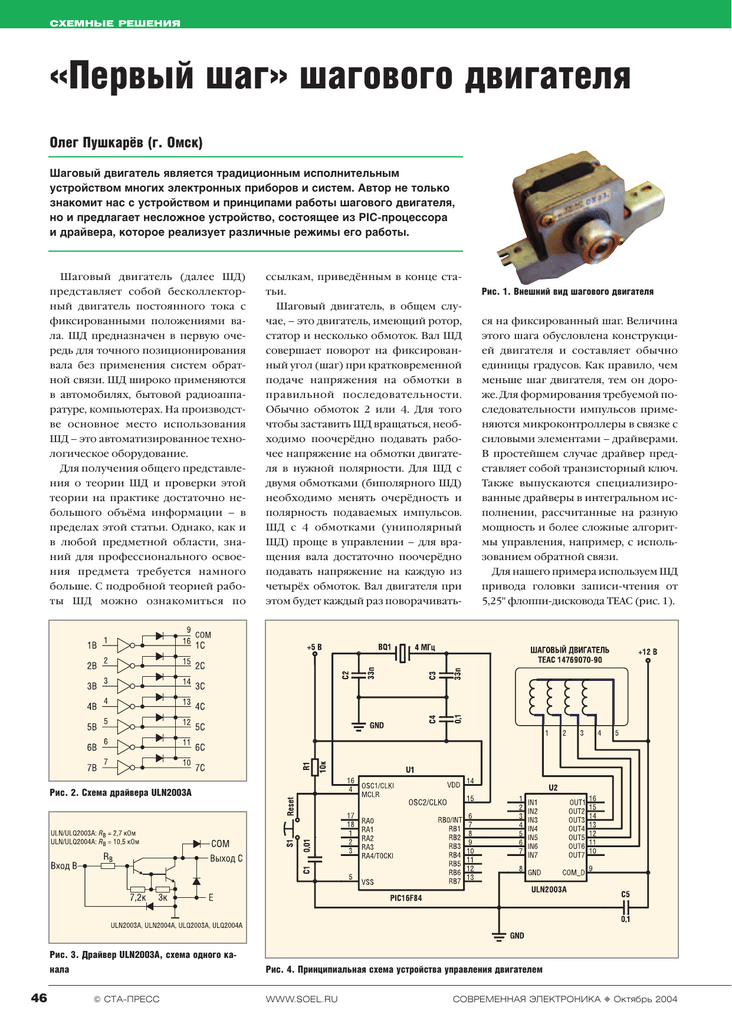 Китайцы бывает, с цветами не дружат.
Китайцы бывает, с цветами не дружат.
Знаю технику безопасности как свои три пальца.Эксперт — это существо, которое перестало мыслить, ибо оно знает!В мире еще много граблей, на которые не ступала нога человека.
Пожалуйста! Исправляйте мои глупые ошибки (но оставьте мои умные ошибки)!
- Наверх
#52
OFFLINE
cabris
Отправлено 29 Июль 2013 — 14:00
Всем привет! имеется биполярный драивер 2M542 и шаговик ДШИ-2-1 с 8 проводами, спалить чего нибуть неохота, а подключить вроде как и надобно.
Если правильно понимаю то надо подлючать можно поразному, а можно так ?
АН к A+
АК к A-
ГН к B+
ГК к B-
Спасибо за помощ!
- Наверх
#53
OFFLINE
Roma
Отправлено 29 Июль 2013 — 16:16
Всем привет! имеется биполярный драивер 2M542 и шаговик ДШИ-2-1 с 8 проводами, спалить чего нибуть неохота, а подключить вроде как и надобно.
Если правильно понимаю то надо подлючать можно поразному, а можно так ?АН к A+
АК к A-
ГН к B+
ГК к B-
Можно…
- Наверх
#54
OFFLINE
диман
Отправлено 05 Сентябрь 2014 — 18:53
помогите подключить шаговый двигатель с 8-ю выходнымии проводами модель GD86STh218-4208A к драйверу шагового модель PLD880
- Наверх
#55
OFFLINE
2ar
Отправлено 05 Сентябрь 2014 — 22:10
Вот мануал на шаговик http://www.giden. ru/…g_Gearmotor.pdf
ru/…g_Gearmotor.pdf
А здесь на драйвер http://www.purelogic…iver/PLD880.pdf
Я бы подключил A+ к RED, YEL+BLU, BLK k A-
B+ k WHT, ORG+BRN, GRN r B-
- Наверх
#56
OFFLINE
Lodochnik
Отправлено 05 Сентябрь 2014 — 22:33
Я бы подключил A+ к RED, YEL+BLU, BLK k A- B+ k WHT, ORG+BRN, GRN r B-
Для такого подключения нужен БП с большим напряжением, иначе сильно момент на больших скоростях упадет. Я обычно параллелю обмотки.
A+ к RED и BLU/// YEL и BLK к A-
B+ k WHT и BRN///ORG и GRN к B-
С уважением, Олег.
- Наверх
#57
OFFLINE
2ar
Отправлено 05 Сентябрь 2014 — 22:44
Можно и так. ..
..
- Наверх
#58
OFFLINE
РукиЧПУки
Отправлено 31 Май 2018 — 17:50
Подскажите пожалуйста, в чем заключается настройка драйверов шагового двигателя(в частности ykd2608mh), достаточно выставить переключатели в соответствии с параметрами двигателя, по таблице на самом драйвере или же есть какое то спец ПО для точной настройки всех параметров?
Сомнения пришли с видео из ютуба про настройку драйвера от лидшайн, в нем человек с помощью какой-то родной(вроде от лидшайн) проги калибровал токи на разных скоростях добиваясь максимальной плавности движения и минимальных вибраций, шумов, писков.
На купленом у самоделкина станке шд вибрируют и жужжат, вот хочется сделать хорошо, в планах построить новый, но самостоятельно!(в розовых мечтах построить 5и осевой с наклонно-поворотным шпинделем)
Спасибо заранее!
- Наверх
#59
OFFLINE
Lodochnik
Отправлено 31 Май 2018 — 18:08
Подскажите пожалуйста, в чем заключается настройка драйверов шагового двигателя(в частности ykd2608mh), достаточно выставить переключатели в соответствии с параметрами двигателя, по таблице на самом драйвере
Достаточно. Этот драйвер цифровой, моторы мягко работать будут.
Этот драйвер цифровой, моторы мягко работать будут.
С уважением, Олег.
- Наверх
#60
OFFLINE
РукиЧПУки
Отправлено 31 Май 2018 — 19:47
Достаточно.Этот драйвер цифровой, моторы мягко работать будут.
А не подскажете от чего вибрации у шаговиков на оси y? Микрошаг стоит 1/16, rms-4.28, peak- 5.14, шд китайский 86hs8060a4 12.7 (1.8 6А)
Не греется сильно, тепленький во время работы, по обработке на мдф, остаются волны как будто дергано работает(может фреза,может портал недостаточно жесткий, просто для очистки совести хочется удостовериться что с шд и драйвером все в порядке)
- Наверх
Как работают шаговые двигатели
Что такое шаговый двигатель?
Прежде всего, шаговый двигатель — это двигатель. Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Основы работы шагового двигателя
Как и все моторы, шаговые двигатели состоят из статора и ротора. На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:
На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:
Здесь мы видим 4 обмотки, расположенные под углом 90° по-отношению друг к другу, размещенные на статоре. Различия в способах подключения обмоток в конечном счете определяют тип подключения шагового двигателя. На рисунке выше, обмотки не соединяются вместе. Мотор по такой схеме имеет шаг поворота равный 90°. Обмотки задействуются по кругу — одна за другой. Направление вращения вала определяется порядком, в котором задействуются обмотки. Ниже показана работа такого мотора. Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Режимы управления
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Волновое управление или полношаговое управление одной обмоткой
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Полношаговый режим управления
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно. В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Полушаговый режим
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Однообмоточный режим
Двухобмоточный режим
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования. Например, этот мотор даст 8 шагов на оборот!
Режим микрошага
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.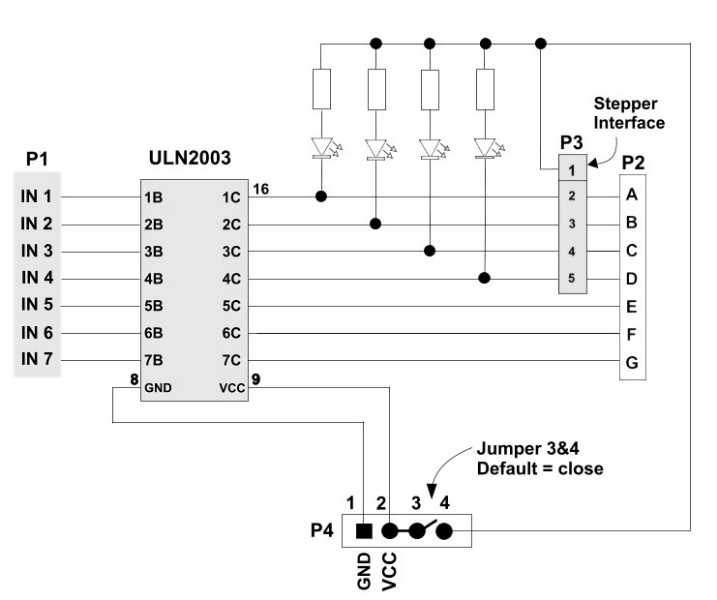
Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Типы шаговых двигателей
Шаговый двигатель с постоянным магнитом
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0.9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение.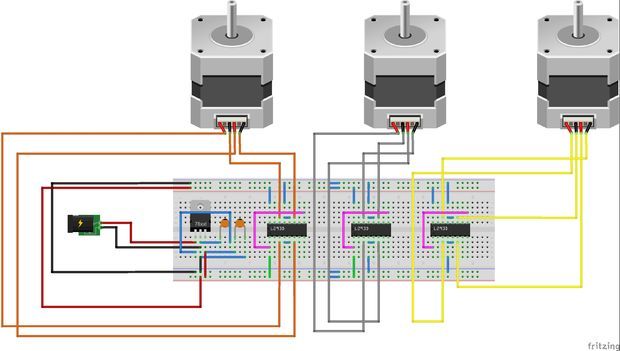 Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.
Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй.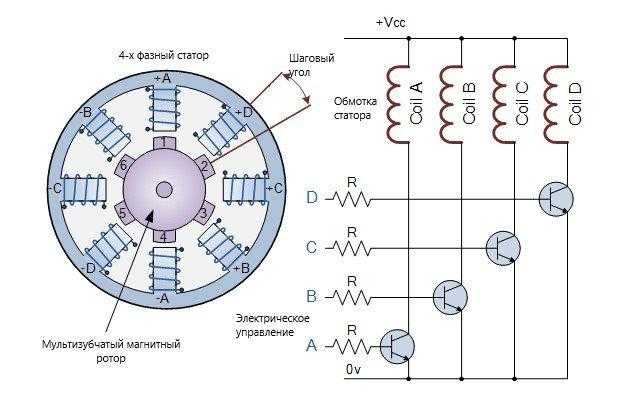 Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Подключение обмоток
Шаговые двигатели относятся к многофазным моторам. Больше обмоток, значит, больше фаз. Больше фаз, более гладкая работа мотора и более выокая стоимость. Крутящий момент не связан с числом фаз. Наибольшее распространение получили двухфазные двигатели. Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Существует три различных типа подключения для двухфазных шаговых двигателей. Обмотки соединяются между собой, и, в зависимости от подключения, используется различное число проводов для подключения мотора к контроллеру.
Биполярный двигатель
Это наиболее простая конфигурация. Используются 4 провода для подключения мотора к контроллеру. Обмотки соединяются внутри последовательно или параллельно. Пример биполярного двигателя:
Мотор имеет 4 клеммы. Два желтых терминала (цвета не соответствуют стандартным!) питают вертикальную обмотку, два розовых — горизонтальную обмотку. Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
Униполярный двигатель
В униполярном двигателе общий провод подключен к точке, где две обмотки соединены вместе:
Используя этот общий провод, можно легко изменить магнитные полюса. Предположим, например, что мы подключили общий провод к земле. Запитав сначала один вывод обмотки, а затем другой — мы изменяем магнитные полюса. Это означает, что схема для использования биполярного двигателя очень простая, как правило, состоит только из двух транзисторов на фазу. Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Униполярные двигатели могут иметь 5 или 6 выводов для подключения. На рисунке выше продемонстрирован униполярный мотор с 6 выводами. Существуют двигатели, в которых два общих провода соединены внутри. В этом случае, мотор имеет 5 клемм для подключения.
8-выводной шаговый двигатель
Это наиболее гибкий шаговый мотор в плане подключения. Все обмотки имеют выводы с двух сторон:
Этот двигатель может быть подключен любым из возможных способов. Он может быть подключен как:
- 5 или 6-выводной униполярный,
- биполярный с последовательно соединенными обмотками,
- биполярный с параллельно соединенными обмотками,
- биполярный с одним подключением на фазу для приложений с малым потреблением тока
Шаговый двигатель: устройство, принцип работы, типы, схемы подключения
Шаговые двигатели широко используются в принтерах, автоматических инструментах, приводах дисководов, автомобильных приборных панелях и других приложениях, требующих высокой точности позиционирования.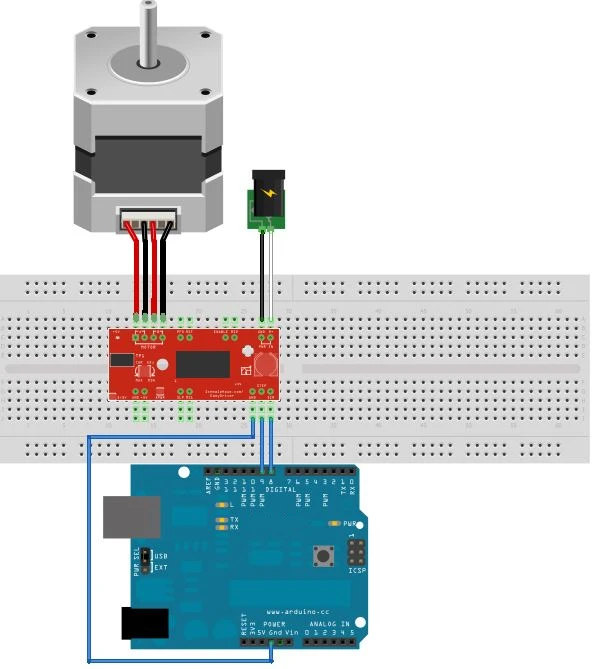
Двигатели постоянного тока (ДПТ) с постоянными магнитами начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение. Переключение направления тока через обмотки ротора осуществляется механическим коммутатором — коллектором. Постоянные магниты при этом расположены на статоре.
Шаговый двигатель (ШД) может быть рассмотрен как ДПТ без коллекторного узла. Обмотки ШД являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала.
Все коммутации производятся внешними схемами. Обычно система «мотор — контроллер» разрабатывается так, чтобы была возможность вывода ротора в любую фиксированную позицию, то есть система управляется по положению.
Цикличность позиционирования ротора зависит от его геометрии.
Принято различать шаговые двигатели и серводвигатели. Принцип их действия во многом похож, и многие контроллеры могут работать с обоими типами. Основное отличие заключается в шаговом (дискретном) режиме работы шагового двигателя (n шагов на один оборот ротора) и плавности вращения синхронного двигателя.
Основное отличие заключается в шаговом (дискретном) режиме работы шагового двигателя (n шагов на один оборот ротора) и плавности вращения синхронного двигателя.
Серводвигатели требуют наличия в системе управления датчика обратной связи по скорости и/или положению, в качестве которого обычно используется резольвер или sin/cos энкодер. Шаговые двигатели используются преимущественно в системах без обратных связей, требующих небольших ускорений при движении.
Синхронные сервомоторы обычно используются в скоростных высокодинамичных системах.
Шаговые двигатели(ШД) делятся на две разновидности: с постоянными магнитами и с переменным магнитным сопротивлением (гибридные). Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рис. 1).
Схема униполярных шаговых двигателей (рис. 1)
Биполярные шаговые двигатели с постоянными магнитами и гибридные двигатели сконструированы более просто, чем униполярные, обмотки в них не имеют центрального отвода (см. рис. 2).
рис. 2).
За это упрощение приходится платить более сложным реверсированием полярности каждой пары полюсов мотора.
Схема биполярных шаговых двигателей (рис. 2)
Шаговые двигатели имеют широкий диапазон угловых разрешений. Более грубые моторы обычно вращаются на 90° за шаг, в то время как прецизионные двигатели могут иметь разрешение 1,8° или 0,72° на шаг.
Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи широтно-импульсной модуляции.
Если в процессе управления используется возбуждение только одной обмотки в любой момент времени, то ротор будет поворачиваться на фиксированный угол, который будет удерживаться пока внешний момент не превысит момента удержания двигателя в точке равновесия.
Для правильного управления биполярным шаговым двигателем необходима электрическая схема, которая должна выполнять функции старта, остановки, реверса и изменения скорости.
Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках.
Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя.
Каждая серия содержит высокопроизводительные компоненты, отвечающие все возрастающим требованиям к характеристикам современных электронных устройств.
Схема управления для биполярного шагового двигателя требует наличия мостовой схемы для каждой обмотки. Она позволяет независимо менять полярность напряжения на каждой обмотке.
На рисунке 3 показана последовательность управления для режима с единичным шагом.
Последовательность управления для режима с единичным шагом. (рис. 3)
На рисунке 4 показана последовательность для режима с половинным шагом.
Максимальная скорость движения определяется исходя из физических возможностей шагового двигателя. При этом скорость регулируется путем изменения размера шага. Более крупные шаги соответствуют большей скорости движения.
При этом скорость регулируется путем изменения размера шага. Более крупные шаги соответствуют большей скорости движения.
- В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению выходного вала исполнительного двигателя.
- Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро-аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
- Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи.
Последовательность управления для полушагового управления.
Мощность шаговых двигателей лежит в диапазоне от нескольких ватт до одного киловатта. Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота.
Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота.
Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора (К).
Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами), реактивного типа и индукторные.
Система отработки угла выходного вала двигателя с использованием датчика обратной связи.
В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления.
- Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя.
- Различают два вида коммутации обмотки шагового двигателя: симметричную и несимметричную.
- При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления.

Принципиальная схема управления шаговым двигателем
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления.
Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов больше 1, выполненный в виде «звездочки».
Симметричная схема коммутации Несимметричная схема коммутации
Число тактов Kt системы управления называют количеством состояний коммутатора за период его работы t. Как видно из рисунков, для симметричной системы управления Kt = 4, а для несимметричной Kt = 8.
- В общем случае число тактов Kt зависит от числа обмоток управления (фаз статора) mу и может быть посчитано по формуле:
- Kt = mу * n1 * n2,
- где: n1 = 1 — при симметричной системе коммутации;
- n1 = 2 — при несимметричной системе коммутации;
- n2 = 1 — при однополярной коммутации;
- n2 = 2 — при двуполярной коммутации.
Схемы, иллюстрирующие положения ротора шагового двигателя с постоянными магнитами при подключении к источнику питания одной (а) и двух (б) обмоток
При однополярной коммутации ток в обмотках управления протекает в одном направлении, а при двуполярной — в обоих. Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора.
Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают. Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р = 1). Реальные шаговые микродвигатели являются многополюсными (р > 1).
Для примера приведем двухполюсный трехфазный шаговый двигатель.
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
αш = 360 / Kt * р
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол.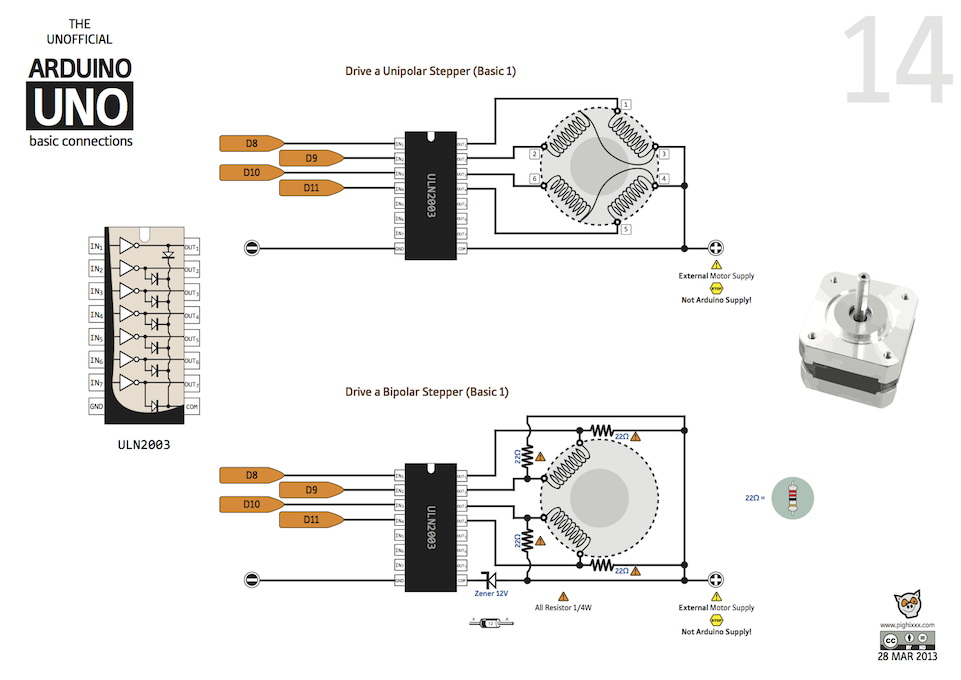 Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния, поэтому р = 4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния, поэтому р = 4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
У активных шаговых двигателей есть один существенный недостаток: у них — крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора.
Принцип действия реактивного редукторного шагового двигателя: (а) — исходное положение устойчивого равновесия; (б) — положение устойчивого равновесия, сдвинутое на один шаг
- При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
- Величина углового шага редукторного реактивного шагового двигателя определяется выражением:
- αш = 360 / Kt * Zр
- В выражении для KT величину n2 следует брать равной 1, так как изменение направления поля не влияет на положение ротора.
- Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
- Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышения степени редукции шаговых двигателей как активного, так и реактивного типа, можно достичь применением двух-, трех- и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления.
Если число пакетов — два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время, роторы-звездочки каждого из пакетов не имеют пространственного сдвига, то есть оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной.
Кроме того, она требует сложного коммутатора.
Индукторные (гибридные шаговые двигатели
Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д.
Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора.
При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.

По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага — больший синхронизирующий момент, лучшие энергетические и динамические характеристики.
При автоматизации производственных процессов часто бывает необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т. д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов.
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом.
Схема, иллюстрирующая работу линейного шагового двигателя
Зубцовые деления статора и подвижной части двигателя равны. В пределах одного магнитопровода ротора они сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно соответствующих параметров первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Зубцовые деления второго магнитопровода сдвинуты относительно соответствующих параметров первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Читайте также: Термоусадочная трубка: что это такое, маркировка, как использовать
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя.
Разница — лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, то есть на четверть зубцового деления t/4.
- ΔXш = tz / Кt
- где Kt — число тактов схемы управления.
- Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели.
В линейных шаговых двигателях применяют магнитовоздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора.
Через специальные форсунки под него нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между ними создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором.
При этом обеспечиваются минимальное сопротивление движению ротора и высокая точность позиционирования.
Шаговый двигатель работает устойчиво, если в процессе отработки угла при подаче на его обмотки управления серии импульсов не происходит потери ни одного шага. Это значит, что в процессе отработки каждого из шагов ротор двигателя занимает устойчивое равновесие по отношению к вектору результирующей магнитной индукции дискретно вращающегося магнитного поля статора.
Режим отработки единичных шагов соответствует частоте импульсов управления, подаваемых на обмотки шагового двигателя, при которой шаговый двигатель отрабатывает до прихода следующего импульса заданный угол вращения. Это значит, что в начале каждого шага угловая скорость вращения двигателя равна 0.
Это значит, что в начале каждого шага угловая скорость вращения двигателя равна 0.
При этом возможны колебания углового вала двигателя относительно установившегося значения. Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла.
Кинетическая энергия преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
Процесс отработки шагов шаговым двигателем
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение между числом шагов ротора и потоком статора.
Основными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость.
Предельная механическая характеристика — это зависимость максимального синхронизирующего момента от частоты управляющих импульсов.
Предельная механическая характеристика шагового двигателя
Приемистость — это наибольшая частота управляющих импульсов, при которой не происходит потери или добавления шага при их отработке. Она является основным показателем переходного режима шагового двигателя. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся (или линейно перемещаемых) частей и статического момента сопротивления.
Она является основным показателем переходного режима шагового двигателя. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся (или линейно перемещаемых) частей и статического момента сопротивления.
Предельная динамическая характеристика шагового двигателя
Приемистость падает с увеличением нагрузки.
Источник: https://PureLogic.ru/article/shagovye_dvigateli_printsip_raboty_i_upravlenie/
Шаговый двигатель: принцип работы, конструкция и управление
В данной статье мы рассмотрим шаговый двигатель постоянного тока, подробно разберем принцип работы, конструкцию и управление, а так же разберем один из чипов управления.
Описание и принцип работы
Как и двигатель постоянного тока, описанный в предыдущей статье, шаговые двигатели также являются электромеханическими исполнительными механизмами, которые преобразуют импульсный цифровой входной сигнал в дискретный (инкрементальный) механический ход, широко используются в промышленных системах управления.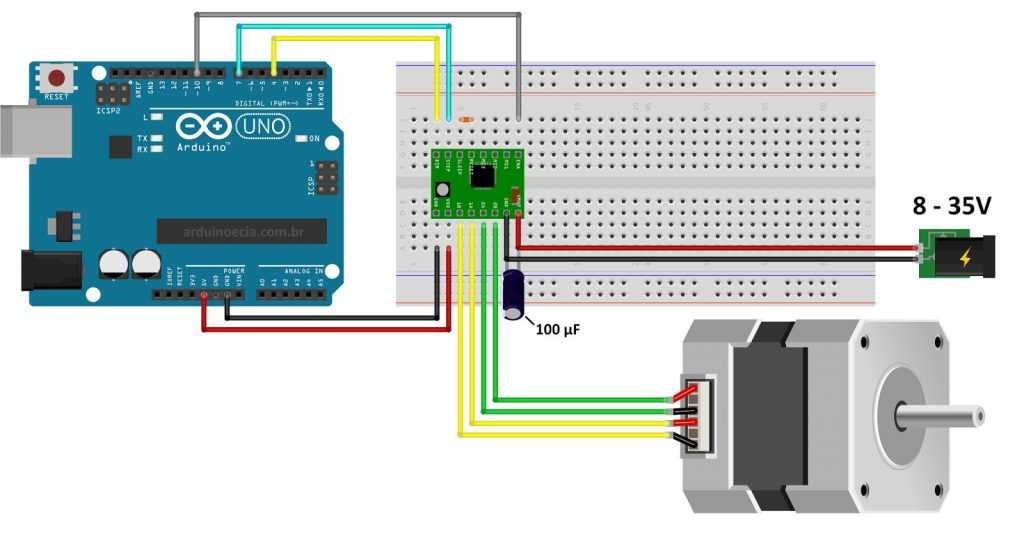 Шаговый двигатель представляет собой тип синхронного бесщеточного двигателя, в котором он не имеет ротора с коммутатором и угольных щеток, но имеет ротор, состоящий из многих (некоторые типы имеют сотни) постоянных магнитных зубьев и статор с отдельными обмотками.
Шаговый двигатель представляет собой тип синхронного бесщеточного двигателя, в котором он не имеет ротора с коммутатором и угольных щеток, но имеет ротор, состоящий из многих (некоторые типы имеют сотни) постоянных магнитных зубьев и статор с отдельными обмотками.
Как следует из названия, шаговый двигатель не вращается непрерывно, как обычный двигатель постоянного тока, а движется дискретными «шагами» или «приращениями», причем угол каждого вращательного движения или шага зависит от числа полюсов статора и ротора. зубья имеет шаговый мотор.
Из-за их дискретной шаговой операции шаговые двигатели могут легко вращаться за конечную долю оборота за раз, например, 1,8, 3,6, 7,5 градусов и т.д. Так, например, давайте предположим, что шаговый двигатель совершает один полный оборот 360 o ровно за 100 шагов.
Тогда угол шага для двигателя задается как 360 градусов / 100 шагов = 3,6 градуса за шаг. Это значение обычно известно как Шаг угла.
Существует три основных типа шагового двигателя: переменное сопротивление, постоянный магнит и гибрид (своего рода комбинация обоих).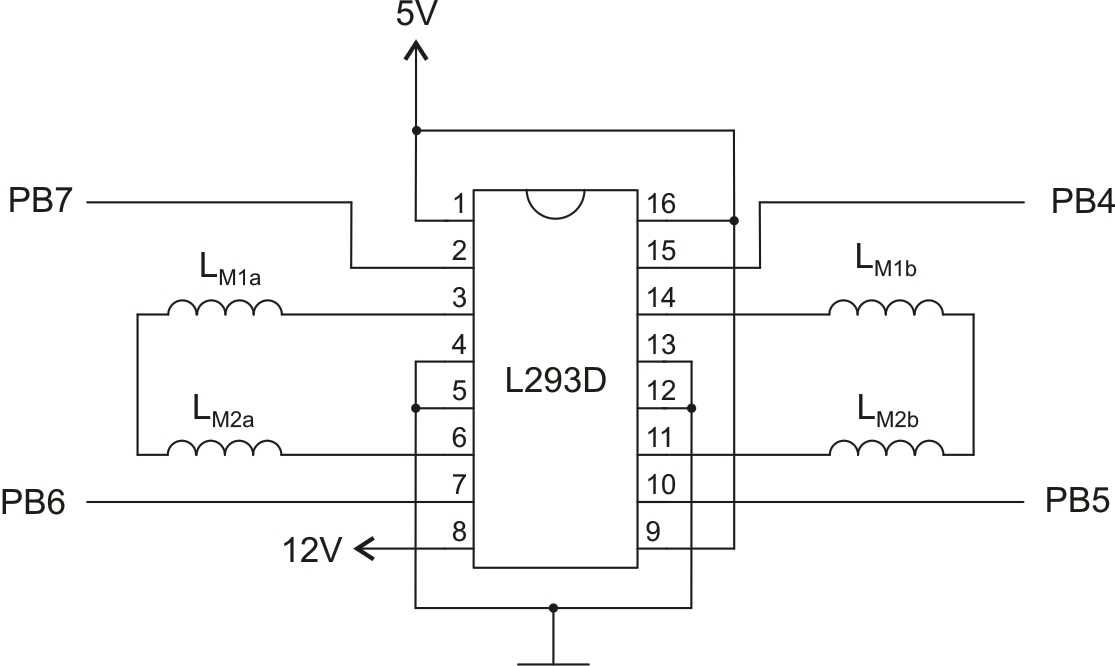
Шаговый двигатель особенно хорошо подходит для устройств, требующих точного позиционирования и повторяемость с быстрой реакцией на запуск, остановка, реверс и регулировка скорости и другой ключевой особенностью шагового двигателя является его способность удерживать заряд ровно после достижения требуемого положения.
Как правило, шаговые двигатели имеют внутренний ротор с большим количеством «зубьев» постоянного магнита с рядом электромагнитных «зубьев», установленных на статоре. Электромагниты статоров поляризованы и деполяризованы последовательно, заставляя ротор вращаться по одному «шагу» за раз.
Современные многополюсные, многозубые шаговые двигатели имеют погрешность менее 0,9 градуса на шаг (400 импульсов на оборот) и в основном используются для высокоточных систем позиционирования, подобных тем, которые используются для магнитных головок в дисководе гибких дисков / жестких дисках, принтеры / плоттеры или роботизированные устройства. Наиболее часто используемым шаговым двигателем является шаговый двигатель с шагом 200 на оборот. Он имеет 50 зубчатый ротор, 4-фазный статор и угол шага 1,8 градуса (360 градусов / (50 × 4)).
Наиболее часто используемым шаговым двигателем является шаговый двигатель с шагом 200 на оборот. Он имеет 50 зубчатый ротор, 4-фазный статор и угол шага 1,8 градуса (360 градусов / (50 × 4)).
Конструкция и управление шаговым двигателем
В нашем простом примере шагового двигателя с переменным сопротивлением выше, двигатель состоит из центрального ротора окружен четырьмя электромагнитными катушками, помеченных A, B, C и D. Все катушки с одной и той же буквой соединены вместе, так что при подаче питания, скажем, катушек, помеченных буквой A, магнитный ротор выравнивается с этим набором катушек.
Подавая мощность на каждый набор катушек, в свою очередь, можно заставить ротор вращаться или «переходить» из одного положения в другое на угол, определяемый конструкцией угла его шага, и при последовательном возбуждении катушек ротор будет производить вращение (движение).
Драйвер шагового двигателя управляет как углом шага, так и скоростью двигателя, запитывая полевые катушки в установленной последовательности, например, « ADCB, ADCB, ADCB, A… » и т. д., ротор будет вращаться в одном направлении (вперед) и посредством при изменении последовательности импульсов на « ABCD, ABCD, ABCD, A… » и т. д. ротор будет вращаться в противоположном направлении (назад).
д., ротор будет вращаться в одном направлении (вперед) и посредством при изменении последовательности импульсов на « ABCD, ABCD, ABCD, A… » и т. д. ротор будет вращаться в противоположном направлении (назад).
Таким образом, в нашем простом примере, приведенном выше, шаговый двигатель имеет четыре катушки, что делает его 4-фазным двигателем с числом полюсов на статоре восемь (2 x 4), которые расположены с интервалом 45 градусов. Число зубьев на роторе составляет шесть, которые расположены на расстоянии 60 градусов друг от друга.
Тогда есть 24 (6 зубьев х 4 катушек) возможных положений или «ступеней», чтобы ротор совершил один полный оборот. Следовательно, вышеуказанный угол шага равен: 360 o / 24 = 15 o .
Очевидно, что чем больше зубьев ротора и / или катушек статора, тем лучше контроль и меньший угол шага. Кроме того, при подключении электрических катушек двигателя в различных конфигурациях возможны полные, половинные и микрошаговые углы. Однако для достижения микроперехода шаговый двигатель должен приводиться в действие (квази) синусоидальным током, который дорог в реализации.
Также возможно контролировать скорость вращения шагового двигателя, изменяя временную задержку между цифровыми импульсами, подаваемыми на катушки (частоту), чем больше задержка, тем медленнее скорость для одного полного оборота. Подавая на двигатель фиксированное количество импульсов, вал двигателя вращается на заданный угол.
Преимущество использования импульса с задержкой по времени заключается в том, что не требуется никакой дополнительной обратной связи, поскольку путем подсчета количества импульсов, подаваемых на двигатель, конечное положение ротора будет точно известно. Эта реакция на заданное количество цифровых входных импульсов позволяет шаговому двигателю работать в «системе с разомкнутым контуром», что делает его более простым и дешевым в управлении.
Например, предположим, что наш шаговый двигатель имеет угол наклона 3,6 градуса на шаг. Чтобы повернуть двигатель на угол, скажем, 216 градусов, а затем снова остановиться в требуемом положении, потребуется всего: 216 градусов / (3,6 градуса / шаг) = 80 импульсов, приложенных к катушкам статора.
Имеется много интегральных схем контроллера шагового двигателя, которые могут контролировать скорость шага, скорость вращения и направление двигателя.
Одним из таких контроллеров является SAA1027, который имеет все необходимые встроенные счетчики и преобразователи кода и может автоматически подключать 4 полностью контролируемых мостовых выхода к двигателю в правильной последовательности.
Направление вращения также может быть выбрано вместе с одношаговым режимом или непрерывным (бесступенчатым) вращением в выбранном направлении, но это накладывает некоторую нагрузку на контроллер. При использовании 8-битного цифрового контроллера возможны также 256 микрошагов за шаг.
Чип управления шаговым двигателем SAA1027
В этом уроке о вращательных приводах, мы рассмотрели шаговый двигатель в качестве электромеханического привода, который может быть использован в качестве устройства вывода для позиционной или скорости управления.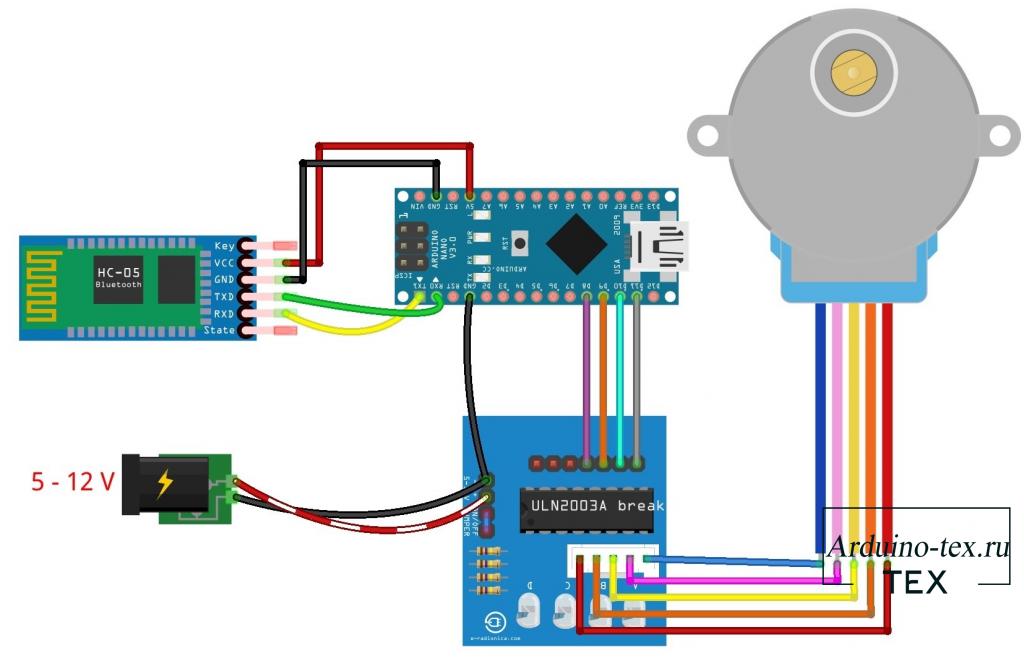
В следующем уроке об устройствах ввода / вывода мы продолжим наш взгляд на устройства вывода, называемые исполнительными механизмами, и в частности те, которые снова преобразуют электрический сигнал в звуковые волны с помощью электромагнетизма.
Источник: https://meanders.ru/shagovyj-dvigatel-postojannogo-toka.shtml
Шаговый двигатель принцип работы для чайников
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора.
Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов.
Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.

Читайте также: Как из проходного выключателя можно сделать обычный?
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Устройство и принцип работы
На рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга.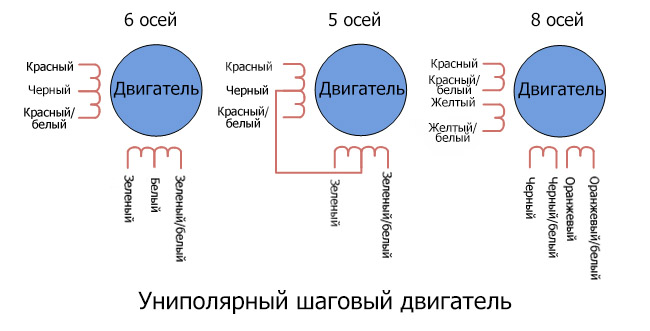 После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата.
Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию.
Конструкция в поперечном разрезе напоминает шестерню с зубцами.
Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
Гибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом.
Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси.
Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
Преимущества гибридного шагового двигателя заключатся в его высокой точности, плавности и скорости перемещения, малым шагом – от 0,9 до 5°. Их применяют для высококлассных станков ЧПУ, компьютерных и офисных приборах и современной робототехнике. Единственным недостатком считается относительно высокая стоимость.
Для примера разберем вариант гибридных ШД на 200 шагов позиционирования вала. Соответственно каждый из цилиндров будет иметь по 50 зубцов, один из них является положительным полюсом, второй отрицательным. При этом каждый положительный зубец расположен напротив паза в отрицательном цилиндре и наоборот. Конструктивно это выглядит так:
Соответственно каждый из цилиндров будет иметь по 50 зубцов, один из них является положительным полюсом, второй отрицательным. При этом каждый положительный зубец расположен напротив паза в отрицательном цилиндре и наоборот. Конструктивно это выглядит так:
Из-за чего на валу шагового двигателя получается 100 перемежающихся полюсов с отличной полярностью. Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.
За счет такой конструкции можно достичь смещения того же южного полюса относительно статора в 50 различных позиций.
За счет отличия положения в полупозиции между северным и южным полюсом достигается возможность перемещения в 100 позициях, а смещение фаз на четверть деления предоставляет возможность увеличить количество шагов за счет последовательного возбуждения еще вдвое, то есть до 200 шагов углового вала за 1 оборот.
Источник: https://master-kleit.ru/origami/shagovyj-dvigatel-princip-raboty-dlja-chajnikov/
Подключение шагового двигателя Комментировать
Шаговый двигатель, биполярный или униполярный, представляет собой электрическое устройство постоянного тока, разделяющее оборот на определённое количество шагов. Количество и величина шагов задаётся специальным устройством, именуемым контроллер шагового двигателя.
Количество и величина шагов задаётся специальным устройством, именуемым контроллер шагового двигателя.
Схема шаговый двигатель + контроллер шагового двигателя широко применяется в самых различных механизмах, от бытовой техники до ЧПУ.
ШД обеспечивает стабильную и бесперебойную работу оборудования, частью которого он является, однако прежде чем начать работу, его необходимо правильно подключить.
Подключение шагового двигателя
В общем и целом процесс подключения шагового двигателя не является затруднительным. В первую очередь нужно определить, какой тип ШД используется. Для этого следует обратить внимание на то, сколькими проводами снабжён электропривод. В зависимости от типа, шаговый двигатель может иметь 4, 5, 6 или 8 проводов.
Шаговый двигатель с 4 проводами может использоваться совместно только с биполярными устройствами. Каждая из двух фазных обмоток такого электродвигателя имеет пару проводов с непрерывной связью. Драйвер ШД в данном случае подключается пошагово.
Шаговый двигатель, оснащённый 6-ю или 8-ю проводами, помимо пары проводов для каждой из обмоток имеет также центр-кран для каждой из них. Такой электродвигатель считается униполярным и может быть подключён как к биполярным, так и к униполярным устройствам.
Для разделения провода при подключении униполярного ШД рекомендуется использовать измерительный прибор. Если униполярный шаговый двигатель подключается к однополярному элементу, допускается использование всех проводов.
Если же подключение необходимо произвести к биполярному оборудованию, используются один конец провода и один центральный кран для каждой из обмоток.
Шаговый двигатель с 5-ю проводами схож с шестипроводным, однако центральные клеммы такого электродвигателя соединяются внутри сплошным кабелем, после чего выводятся к одному проводу.
Разделение проводов в таком механизме – довольно трудоёмкий процесс, который очень сложно произвести без разрывов.
Наиболее безопасным и эффективным выходом из ситуации при подключении такого прибора является определение центра провода с последующим соединением его с другими проводниками.
Стандартной схемой, использующейся для подключения 4-выводного биполярного ШД к драйверу или контроллеру является подключение первой обмотки к разъёмам А и А*, а второй – непосредственно к контроллеру через разъёмы B и B*. Разъёмы контроллера Dir и Step при таком методе подключения не используются; программное управление осуществляется при помощи генератора импульсов.
Источник: https://stepmotor.ru/podklyuchenie-shagovogo-dvigatelya
Шаговые электродвигатели. Виды и работа. Особенности
Шаговые электродвигатели легко решают проблему точного позиционирования, не затратив больших средств. Моторы чаще применяются в роботах, станках с программным управлением. Рассмотрим устройство и действие двигателей.
Устройство
Шаговые электродвигатели являются двигателями переводящими электричество в механическое движение. Главным отличием его от других электромоторов в методе действия. Благодаря этому методу вал вращается. Моторы с шагом созданы для прерывистого вращения, этим они отличаются от других. Их вращение состоит из шагов, от этого получилось название.
Главным отличием его от других электромоторов в методе действия. Благодаря этому методу вал вращается. Моторы с шагом созданы для прерывистого вращения, этим они отличаются от других. Их вращение состоит из шагов, от этого получилось название.
Шаг является частью оборота вала мотора. Размер шага зависит от механической части двигателя и от метода управления. Шаговые двигатели подключаются к различным типам питания.
В отличие от своих собратьев, шаговый мотор имеет управление импульсами, преобразующимися в градусы, а затем во вращение. Например, 2,20 шаговый мотор вращает вал на 2,20 при каждом поданном импульсе.
Эта характеристика дает повод называть их цифровыми.
Метод действия
Обмотки в количестве 4-х штук стоят по кругу равномерно между собой на статоре. В зависимости от того, как подключены эти обмотки будет определяться тип шагового двигателя. В нашем случае обмотки разделены, мотор с шагом, углом поворота в 90 градусов. Обмотки подключены по кругу. Порядок подключения направление вращения двигателя с шагом. На рисунке видно, что вал вращается на 90 градусов в то время, как ток поступит в катушку, через 1 секунду.Стандартными составляющими шаговых двигателей являются ротор и статор. Ротор включает в себя сердечники, изготовленные из магнитов. Схематически дано изображение.
Порядок подключения направление вращения двигателя с шагом. На рисунке видно, что вал вращается на 90 градусов в то время, как ток поступит в катушку, через 1 секунду.Стандартными составляющими шаговых двигателей являются ротор и статор. Ротор включает в себя сердечники, изготовленные из магнитов. Схематически дано изображение.
Режимы управления
При разной подаче тока на катушки вал двигателя вращается по-разному.
Волновое управление
Метод практически нами рассмотрен, волновое действие на катушку. Ток идет через одну катушку. Такой метод редко применяется, характерен пониженным потреблением энергии, дает возможность получения меньше 50% момента вращения двигателя. Большую нагрузку при таком управлении шаговые электродвигатели не выдержат. На один оборот вала приходится четыре шага.
Управление полным шагом
Широко применяемый метод — полношаговый. По этому способу напряжение питания на катушки подается попарно.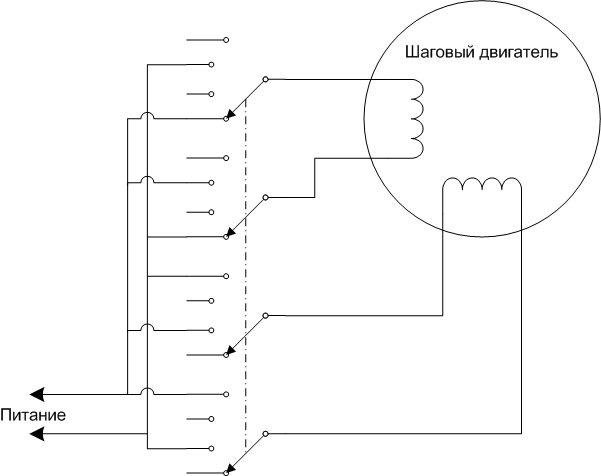 От того, как подключены обмотки, двигателю необходим двойной ток. Электродвигатель при такой схеме выдаст 100% момента вращения по номиналу.
От того, как подключены обмотки, двигателю необходим двойной ток. Электродвигатель при такой схеме выдаст 100% момента вращения по номиналу.
Полный оборот двигателя соответствует четырем шагам, число шагов по номинальному значению.
Режим полушага
Это оригинальный метод получения двойной точности позиционирования, не изменяя конструкцию двигателя. Чтобы работать по этому способу, подключают одновременно все имеющиеся пары. Ротор поворачивается на 0,5 шага. Такой способ имеет место при применении двух или одной катушки.
Режим с 1 обмоткой Режим с 2 обмотками
По этому способу один и тот же мотор может выдать шагов в 2 раза больше на один оборот. Это значит, что система позиционирования работает с двойной точностью. Наш мотор выдает восемь шагов на один оборот.
Микрошаговый режим
Смысл микрошага заключается в подаче на катушки двигателя напряжения питания сигнала определенной формы, похожей на синус, а не импульсов. При таком методе изменения положения дает возможность получения плавного перемещения.
Благодаря микрошаговому режиму шаговые электродвигатели широко применяются в позиционировании, в программно управляемых станках. Рывки деталей, работающих с двигателем, толчки самого механизма понижаются. В микрошаговом режиме двигатель вращается плавно, как моторы постоянного тока.
Конфигурация графика тока, проходящего по обмотке, сходна с синусоидой. В эксплуатации применяются цифровые сигналы. Их примеры показаны на рисунках.
Способ микрошага — подключение питания двигателя, не управления катушками.
Отсюда следует, что микрошаг применяется при волновом типе.
В микрошаговом типе шаги не увеличиваются, хотя визуально это представляется. Для увеличения точности механизма применяют шестерни с трапецеидальными зубьями, чтобы обеспечить плавный ход.
Для увеличения точности механизма применяют шестерни с трапецеидальными зубьями, чтобы обеспечить плавный ход.
Типы моторов
Шаговые электродвигатели с постоянным магнитом
Ротор оборудован постоянным дисковым магнитом с несколькими полюсами. Действует по такому же принципу, как микрошаговый мотор. Катушки статора отталкивают и притягивают магнит, расположенный на роторе, образуя момент вращения.
Размер шага с постоянным магнитом находится в интервале от 45 до 90 градусов.
Читайте также: Методы запуска электродвигателя постоянного тока — схемы
Шаговые электродвигатели с сопротивлением переменной величины
Ротор не имеет постоянных магнитов. Вместо них сердечник ротора производится из металла, похожего на диск с зубьями, или на шестерню. На статоре расположены обмотки в количестве более 4-х штук. Катушки подключаются в парах друг к другу.
Крутящий момент уменьшается, так как постоянные магниты отсутствуют. Однако, имеется положительная сторона — у шаговых моторов отсутствует момент стопорения. Стопорящий момент вращения создан постоянными магнитами, притягивающимися к корпусу статора при отключенном питании в катушках.
Однако, имеется положительная сторона — у шаговых моторов отсутствует момент стопорения. Стопорящий момент вращения создан постоянными магнитами, притягивающимися к корпусу статора при отключенном питании в катушках.
Можно просто определить, какой момент, если попробовать повернуть отсоединенный мотор. Сразу будут понятны ощутимые щелчки в двигателе при каждом шаге. Эти ощущения и будут являться моментом фиксации. Момент притягивает к себе магниты корпуса. На рисунке изображено действие мотора.
Шаг равен интервалу от 5 до 15 градусов
Шаговый мотор гибридного типа
Шаговые электродвигатели называются «гибридными», потому что включают в себя разные типы характеристик. Они имеют хорошие моменты, малый размер шага, находящийся в интервале от 0,9 до 5 градусов. При этом он обеспечивает высокую точность.
Механическая конструкция вращается со значительными скоростями. Такие виды моторов применяются в станках с программным управлением, в роботах. Недостатком является высокая цена. Обыкновенный двигатель вместе с восьмью катушками.
Недостатком является высокая цена. Обыкновенный двигатель вместе с восьмью катушками.
Из-за невозможности изготовления магнита, нашли оригинальное решение. Взяли два диска с зубьями 50 штук, постоянный магнит. Приварили диски к полюсам. Получилось, что два диска имеют соответственно каждый полюс.
Оригинальность конструкции в том, что диски размещены так, что, смотря на них сверху, они похожи на один диск со 100 зубьями. Вершина зуба на одном диске совпадает со впадиной.
На рисунке изображено действие гибридного мотора 75 шагов на один оборот. Шесть обмоток сделаны парами, которые имеют катушку на противоположных краях.
Первая пара – это пара вверху и внизу обмотки, тогда 2-я пара смещена на угол 60+5 градусов от первой, а 3-я смещена на 65 градусов от второй.
Разница углов позволяет вращаться валу двигателя. Управляющие режимы применяются, как волновые для экономии электроэнергии.
Когда катушка задействована, имеется три положительных полюса в 5 градусов сзади, они притягиваются в сторону вращения, и три отрицательных полюса в 5 градусов впереди, толкают ротор в сторону вращения вала. Рабочая обмотка всегда расположена между отрицательным и положительным полюсами.
Рабочая обмотка всегда расположена между отрицательным и положительным полюсами.
Схема подключения обмоток
Шаговые моторы принадлежат к моторам с несколькими фазами. Чем больше фаз, тем работа двигателя мягче, но и выше стоимость. Момент вращения не зависит от числа фаз.
Большое применение получили двигатели с 2-мя фазами. Двигатели подключают тремя типами схем для 2-фазных шаговых моторов.
Катушки соединены друг с другом, применено разное количество проводов для соединения двигателя с контроллером.
Биполярный двигатель
Это самая простая конструкция, применяется четыре провода для соединения мотора с контроллером. Катушки подключены параллельно или последовательно.
Параллельное или последовательное подключение
Двигатель имеет 4 контакта. Два желтых экрана подключают вертикальную катушку, два розовых – горизонтальную. Проблема в изменении полярности, можно изменить направление тока, драйвер станет сложнее.
Униполярный двигатель
Применяя общий провод, изменяют полюса магнитов. Если соединить общий провод с землей, один и другой вывод катушки к питанию, то полюса изменятся. Схема соединения двигателя биполярного типа простая для понимания, она обычно состоит из 2-х транзисторов на одну фазу.
Подключение с общим проводом
Недостаток – применение половины катушек, как при волновой управляемости электромотором. Момент вращения получается равным половине возможного значения.
Униполярные электромоторы необходимо изготавливать по двойным размерам, для обеспечения сопоставимого момента. 1-полярный электромотор имеет возможность применяться в качестве биполярного мотора.
Для этой цели необходимо провод отключить.
Униполярные шаговые электродвигатели имеют несколько вариантов подключения
Общий провод соединен внутри
Шаговый мотор с 8-ю выводами
Это мотор с гибким подключением, обмотки оснащены выводами с обеих сторон.
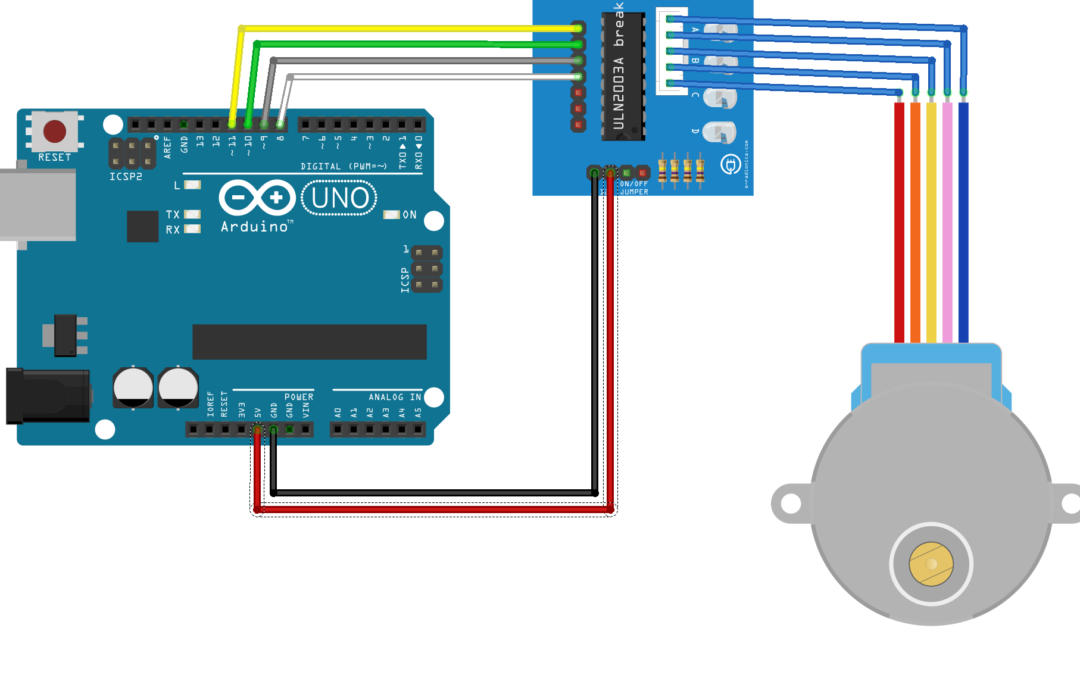 Можно подключать двигатель по любому методу:
Можно подключать двигатель по любому методу:
- Униполярный с 5 или 6 выводами.
- Биполярный с последовательной схемой.
- С параллельной схемой.
- С малым током.
Подключение 4 обмоток
Шаговые электродвигатели Лавета
Моторы Лавета используются в электрических часах. Их конструкция сделана для эксплуатации с одним фазовым сигналом. Моторы Лавета обладают возможностью делать их конструкцию миниатюрной, применяются для исполнительной части часов ручного ношения. Этот тип моторов изобрел инженер Мариус Лавет. По его имени назвали тип шаговых двигателей.
Лавет – выпускник школы электрики изобрел двигатель, который дал ему известность во всем мире. Вид статора похож на статор электромотора с расщепленными полюсами. Имеется одна обмотка, полюса созданы витками с одним проводом из медной жилы толстого сечения, расположены на магнитном проводе, образуют необходимую фазу.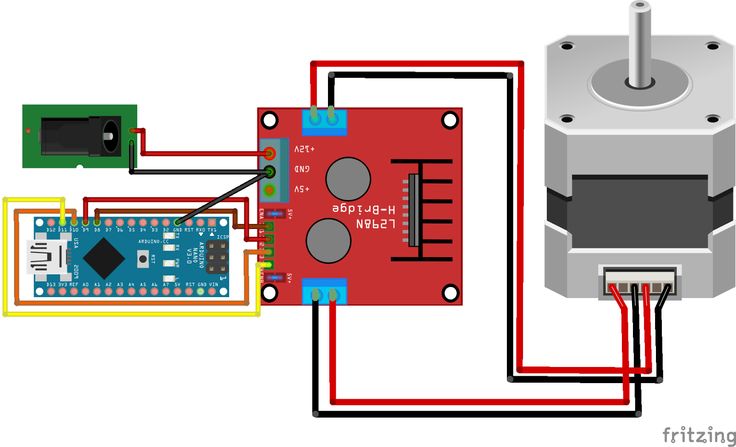 Токи индукции образуют необходимый момент вращения.
Токи индукции образуют необходимый момент вращения.
Магнитное поле распространяется с задержкой, применяется для сдвига фаз, на прямой угол 90 градусов, чтобы имитировать напряжение из двух фаз. Конструкция ротора создана в виде постоянного магнита.
Конструкции такого типа имеют широкую сферу применения в технике для быта (миксерах, блендерах). Моторы Лавета отличаются тем, что из-за зубцов вал стопорится с определенным шагом. Результатом этого возможно движение стрелки секунд.
Разновидность двигателя Лавета не предназначена для реверсивной работы, как и большинство шаговых моторов.
Похожие темы:
Источник: https://electrosam.ru/glavnaja/jelektrooborudovanie/ustrojstva/shagovye-elektrodvigateli/
Управление шаговым двигателем
Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневного быта. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Итак, давайте узнаем, как использовать шаговый двигатель.
Шаговые двигатели являются частью класса моторов, известных как безщеточные двигатели. Обмотки шагового двигателя являются частью статора.
На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами.
Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Типы шаговых двигателей
- Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
- Двигатели переменной индуктивности используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.
- Двигатели с постоянными магнитами похожи на них, за исключением того, что центральный вал поляризован у северного и южного магнитных полюсов, которые будут соответствующим образом поворачивать его в зависимости от того, какие электромагниты включены.

Гибридный мотор — это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
Униполярные и биполярные шаговые двигатели
Также существует ещё два типа шаговых двигателей: униполярные и биполярные. На фундаментальном уровне, эти два типа работать точно так же; электромагниты включены в последовательном виде, заставляя центральный вал двигателя вращаться.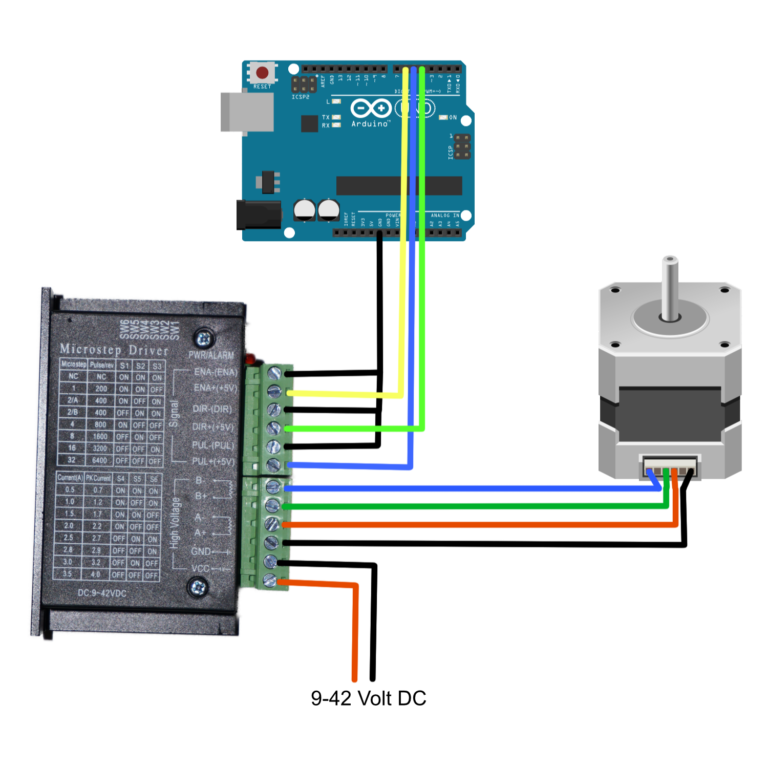
Но униполярный шаговый двигатель работает только с положительным напряжением, а биполярный шаговый двигатель имеет два полюса — положительный и отрицательный.
То есть фактическая разница между этими двумя типами заключается в том, что для однополярных требуется дополнительный провод в середине каждой катушки, что позволит току проходить либо к одному концу катушки, либо другому. Эти два противоположных направления производят две полярности магнитного поля, фактически имитируя как положительные, так и отрицательные напряжения.
Хотя оба они имеют общий уровень питающих напряжений 5V, биполярный шаговый двигатель будет иметь больший крутящий момент, потому что ток течет через всю катушку, производя более сильное магнитное поле.
С другой стороны, униполярные шаговые двигатели используют только половину длины катушки из-за дополнительного провода в середине катушки, а значит меньший крутящий момент доступен для удержания вала на месте.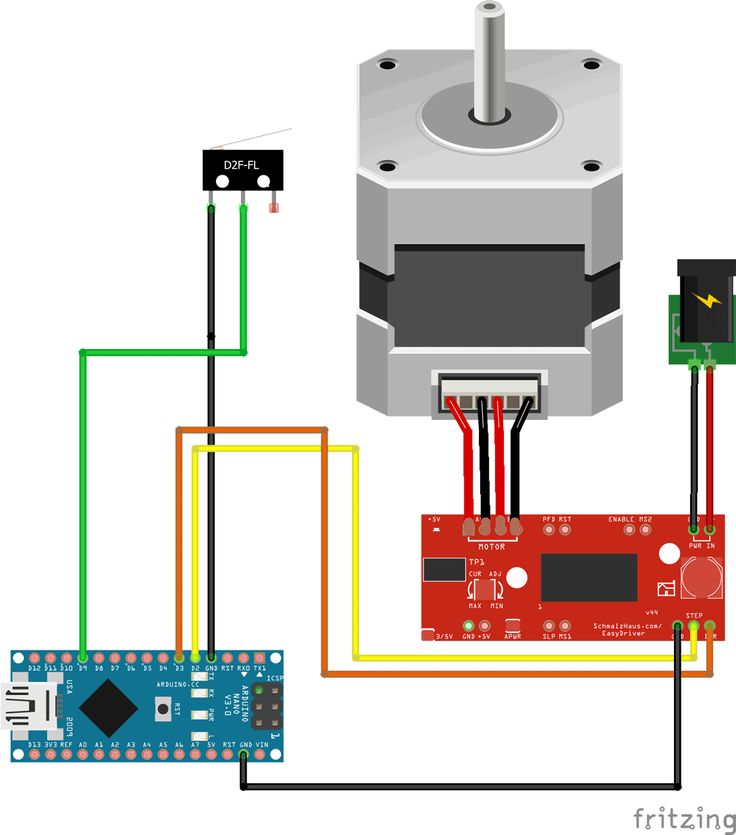
Подключение шаговых двигателей
Разные шаговые двигатели могут иметь разное количество проводов, как правило, 4, 5, 6, или 8. 4-х проводные линии могут поддержать только биполярные шаговые двигатели, поскольку у них нет центрального провода.
5-ти и 6-ти проводные механизмы могут быть использованы как для однополярного, так и биполярного шагового двигателя, в зависимости от того, используется центральный провод на каждой из катушек или нет. 5-ти проводная конфигурация подразумевает, что центральные провода на два комплекта катушек соединены внутри между собой.
Способы управления шаговыми двигателями
Есть несколько различных способов управления шаговыми двигателями — полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
Полный шаг — такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг.
При третьем шаге выключается первый электромагнит и четвертый шаг — поворот на третий электромагнит, а второй электромагнит по-прежнему работает.
Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
Схема подключения шаговых двигателей
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора.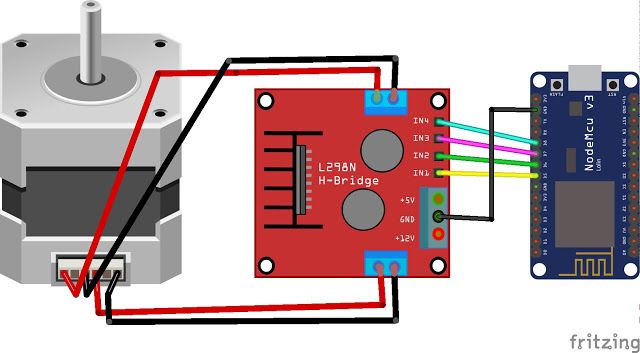 Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
Источник: https://el-shema.ru/publ/ehlektrika/upravlenie_shagovym_dvigatelem/10-1-0-328
Шаговый двигатель
Итак, мы уже рассказали, как устроен серво мотор и сегодня начнем разбирать шаговый двигатель, его схему, драйверы управления и то, где его лучше всего использовать!
Начнем мы с того, что «на пальцах» рассмотрим принцип функционирования данной железяки. Каждый шаговик имеет внутри себя несколько электромагнитов, расположенных вокруг вала. Подавая питание в нужной последовательности на каждую из них, вращающийся элемент двигателя стремится примагнититься катушке. Быстрым переключением питания между электромагнитами можно добиться большой скорости вращения вала мотора и перемещать его в любое положение с большой точностью. Однако для обеспечения этой точности используются различные вспомогательные устройства, так как такой тип двигателя имеет крайне неприятной эффект вибрации. О таких нюансах мы и расскажем далее!
Подавая питание в нужной последовательности на каждую из них, вращающийся элемент двигателя стремится примагнититься катушке. Быстрым переключением питания между электромагнитами можно добиться большой скорости вращения вала мотора и перемещать его в любое положение с большой точностью. Однако для обеспечения этой точности используются различные вспомогательные устройства, так как такой тип двигателя имеет крайне неприятной эффект вибрации. О таких нюансах мы и расскажем далее!
Любой шаговый двигатель имеет два основных элемента: ротор (вал мотора) и статор (неподвижный корпус). Первый состоит из обычных магнитов, а второй — из электрических, управляемых катушек. Стоит отметить, что как раз за счет шагов от одной катушке к другой в шаговиках присутствует вибрация, вызванная инерцией вала мотора. Профили магнитов, принципы управления электромагнитами — все это разделяет шаговики на типы и наделяет их своими плюсами и минусами.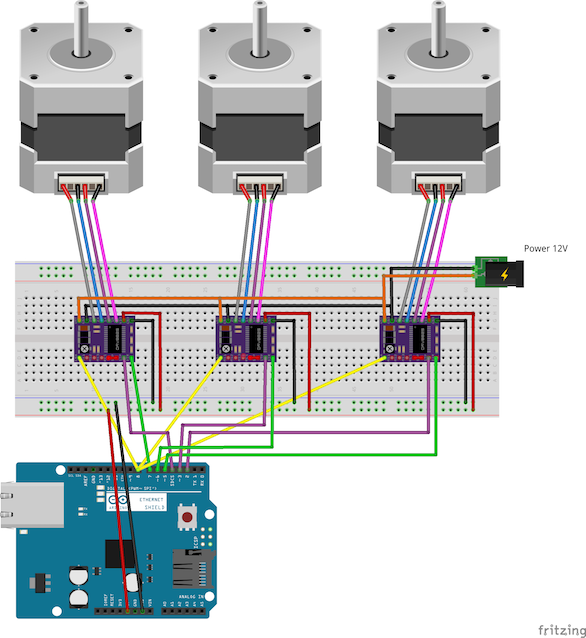
Разделим шаговики на 3 основных класса:
- Переменный шаговый двигатель
Ротор не имеет постоянных магнитов, а оснащен ферромагнитной шестерней. Это материал, который крайне эффективно магнититься, но не так сильно по сравнению с постоянным. Это приводит к проигрышу в крутящем моменте. Зато отсутствует стопорящая сила, возникающая за счет магнитного поля между корпусом мотора и ротором с постоянным магнитом, которую легко почувствовать, покрутив шаговик в выключенном состоянии (характерные щелчки).
Движок оснащен большим количеством катушек, которые включаются попарно. Величина шага варьируется от 5 до 15 градусов. - Шаговый двигатель с постоянным магнитом
Ротор такого устройства состоит из нескольких разнополюсных магнитов. Принцип разбирали в самом начале. Характерный шаг от 45 до 90 градусов.
- Гибридный шаговый двигатель
Как можно догадаться, данный тип совместил в себе первые два и унаследовал все плюсы. Отличительными характеристиками данного шаговика являются высокая точность (1-5 градуса), малая вибрация и приличная скорость вращения. Все хорошо, но такие штуки отличаются от своих собратьев еще и ценой! Это связано со сложностью изготовки. Но производители пошли на технологическую хитрость. Практически невозможно создать многозубцовую (скажем, 100) шестеренку, где соседние зубья будут разных полюсов.
Но достаточно просто создать два таких диска, имеющих противоположные полюса. Затем их сдвигают так, что если посмотреть сбоку, получится то, что мы и хотели. Осталось правильным образом расположить обмотки и включать их по оптимальной логике, обеспечивающей наибольшую эффективность!
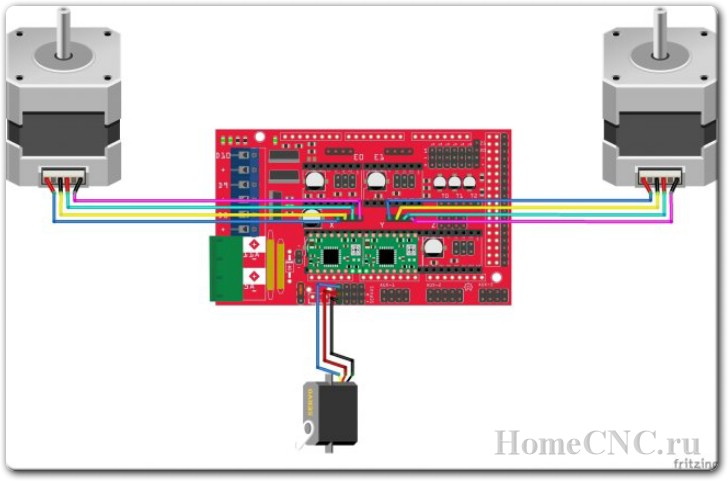 Отличительными характеристиками данного шаговика являются высокая точность (1-5 градуса), малая вибрация и приличная скорость вращения. Все хорошо, но такие штуки отличаются от своих собратьев еще и ценой! Это связано со сложностью изготовки. Но производители пошли на технологическую хитрость. Практически невозможно создать многозубцовую (скажем, 100) шестеренку, где соседние зубья будут разных полюсов.
Отличительными характеристиками данного шаговика являются высокая точность (1-5 градуса), малая вибрация и приличная скорость вращения. Все хорошо, но такие штуки отличаются от своих собратьев еще и ценой! Это связано со сложностью изготовки. Но производители пошли на технологическую хитрость. Практически невозможно создать многозубцовую (скажем, 100) шестеренку, где соседние зубья будут разных полюсов.
Теперь давайте пробежимся по методам управления шаговыми двигателями. Их также можно разделить на несколько пунктов:
- Полношаговое управление одной обмоткой
Это самый простой вариант. Последовательно включается только одна катушка и к ней притягивается вал мотора. В таком случае крутящий момент будет меньше чем в следующем способе. - Полношаговое управление двумя обмотками
Принцип такой же, как и в предыдущем случае, но теперь управление идет парой электромагнитов. Это обеспечивает максимальный крутящий момент мотора, но требует в два раза больше тока или напряжения (зависит от метода подключения катушек друг к другу). - Полушаговое управление
Данная логика включения катушек позволит увеличить число шагов, а, следовательно, и точность в 2 раза! Аналогично предыдущим пунктам, можно управлять одной катушкой или парой. Вся фишка в том, что в данном случае переход на следующую катушку происходит не при полном выключении предыдущей. То есть, при работе двух соседних катушек вал мотора встает в промежуточное состояние.
- Сверхточное управление
Наверное, у многих после предыдущего пункта появилась мысль: а что если мы будем подавать разную мощность на две соседние катушки, меняющуюся по определенному закону, и получим еще больше промежуточных шагов? Именно так и устроены современные двигатели в сверхточных ЧПУ и прочих подобных устройствах. Хитрое управление обмотками позволяет значительно повысить точность позиционирования подобных моторов. В таких случаях используют специальные драйверы для шаговых двигателей, позволяющих осуществлять подобный режим управления.
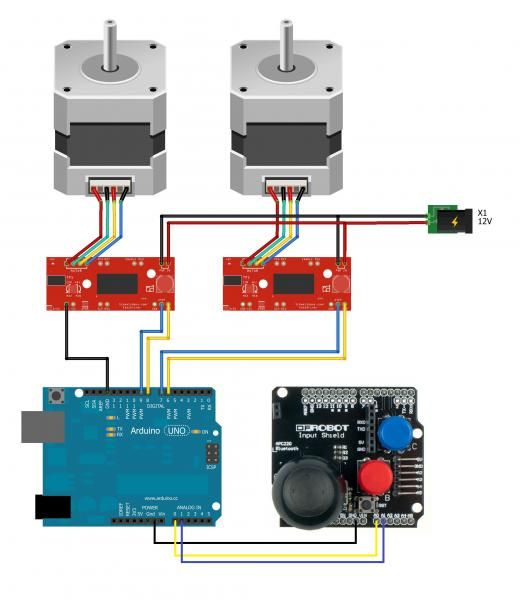 В таком случае крутящий момент будет меньше чем в следующем способе.
В таком случае крутящий момент будет меньше чем в следующем способе.
 Хитрое управление обмотками позволяет значительно повысить точность позиционирования подобных моторов. В таких случаях используют специальные драйверы для шаговых двигателей, позволяющих осуществлять подобный режим управления.
Хитрое управление обмотками позволяет значительно повысить точность позиционирования подобных моторов. В таких случаях используют специальные драйверы для шаговых двигателей, позволяющих осуществлять подобный режим управления.
В качестве примера в данной статье рассмотрим подключения двух шаговых двигателей к плате Arduino. Для начала рассмотрим мотор 17hs4401, которой используется в 3D принтерах. Данная модель является биполярной, то есть у нас есть две пары обмоток от которых идет 4 кабеля.
Шаговый двигатель 17hs4401 обладает большим крутящим моментом и может питаться от сети 12 V. Чтобы не перегружать нашу плату управления большими мощностями, шаговик подключается к ней с помощью специального драйвера А4988, который способен работать в жестких условиях (до 35 V и 2 А).
Слабые управляющие сигналы с Arduino идут на драйвер, а тот уже взаимодействует с 17hs4401 с более мощными параметрами по току и напряжению.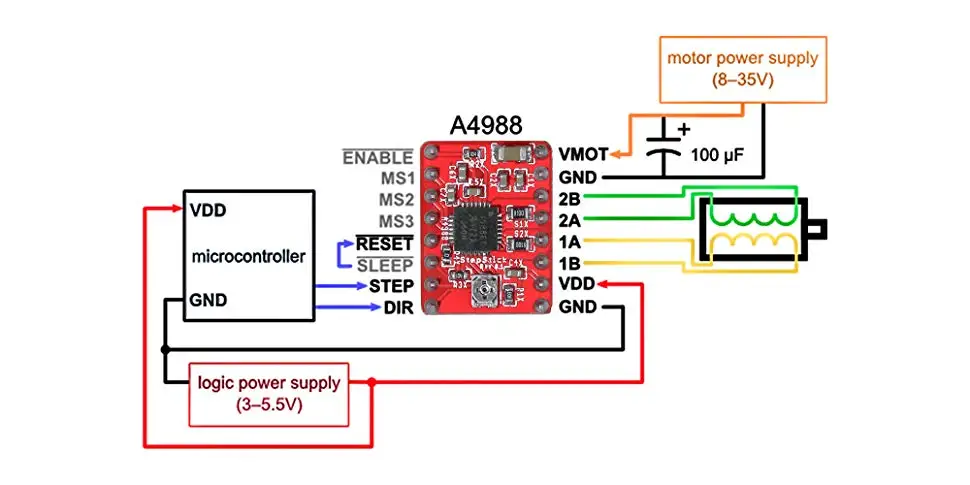 К ножкам A4988 VDD и GND подводится питание логического уровня (3 — 5,5 В), к VMOT и GND — питание двигателя (8 — 35 В). Стоит отметить, что в данной системе бывают скачки напряжения, которые могут привести к поломке оборудования. Поэтому (на 3D принтерах всегда) ставят большие конденсаторы (более 47 мкФ). Драйвер имеет болт, который регулирует силу тока. Работая на предельных значениях, вы рискуете сжечь его, особенно если не наклеен радиатор, идущий в комплекте с устройством.
К ножкам A4988 VDD и GND подводится питание логического уровня (3 — 5,5 В), к VMOT и GND — питание двигателя (8 — 35 В). Стоит отметить, что в данной системе бывают скачки напряжения, которые могут привести к поломке оборудования. Поэтому (на 3D принтерах всегда) ставят большие конденсаторы (более 47 мкФ). Драйвер имеет болт, который регулирует силу тока. Работая на предельных значениях, вы рискуете сжечь его, особенно если не наклеен радиатор, идущий в комплекте с устройством.
Шаговик 17hs4401 за полный оборот совершает 200 шагов. Это весьма неплохо, но для лучшего позиционирования (крайне важно для ЧПУ) используют схему управления с микрошагами, которую мы изучили ранее. A4988 позволяет осуществлять такую процедуру с коэффициентами 1/2, 1/4, 1/8 и 1/16 шага (комбинируя управление через выходы MS1, MS2, и MS3).
| MS1 | MS2 | MS3 | Step |
| Low | Low | Low | Full |
| High | Low | Low | 1/2 |
| Low | High | Low | 1/4 |
| High | High | Low | 1/8 |
| High | High | High | 1/16 |
Пин STEP отвечает за микрошаг шаговика, DIRECTION — за направление вращения. Выводы STEP и DIRECTION не подтянуты к какому-либо конкретному внутреннему напряжению, поэтому их не стоит оставлять плавающими при создании приложений. Если требуется вращать двигатель в одном направлении,коннектим DIR с VCC или GND. Драйвер имеет три различных входа для управления состоянием питания: RESET, SLEEP и ENABLE. Вывод RESET плавает, если его не нужно использовать, то следует подключить его к SLEEP, чтобы подать на него высокий уровень и включить плату.
Выводы STEP и DIRECTION не подтянуты к какому-либо конкретному внутреннему напряжению, поэтому их не стоит оставлять плавающими при создании приложений. Если требуется вращать двигатель в одном направлении,коннектим DIR с VCC или GND. Драйвер имеет три различных входа для управления состоянием питания: RESET, SLEEP и ENABLE. Вывод RESET плавает, если его не нужно использовать, то следует подключить его к SLEEP, чтобы подать на него высокий уровень и включить плату.
Теперь давайте перейдем непосредственно к подключению данного мотора к микрокомпьютеру. Соединяем контакты согласно указанной ниже схеме:
Обычно, такие моторы используются любителями при сборке 3d принтеров своими руками. Для этого используют Arduino MEGA и шилд ramps 1.4, о котором мы говорили в этой статье. Удобство использования данного комплекта состоит в том, что не нужно соединять кучу проводов — за вас уже все разведено.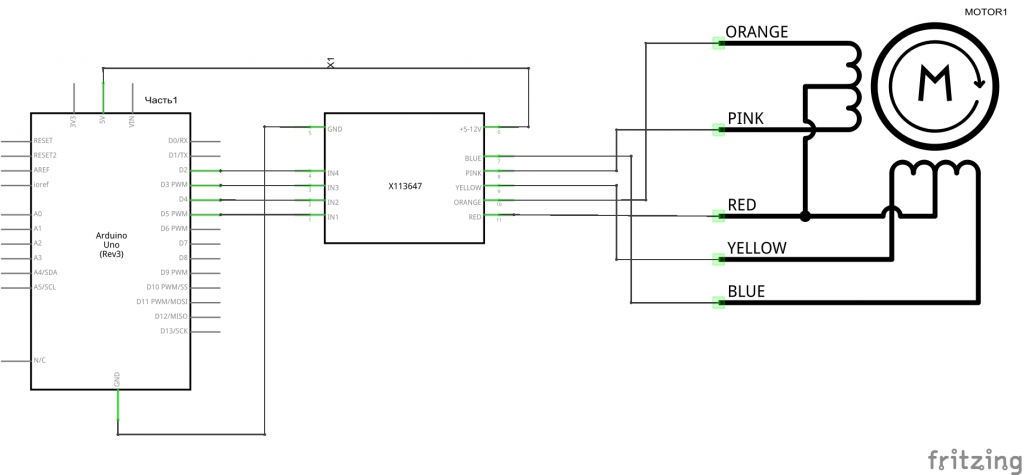 Таким образом, легко подключить сразу до 5 шаговиков!
Таким образом, легко подключить сразу до 5 шаговиков!
Более простым и дешевым вариантом шагового мотора является модель 28byj-48. Его подключение немного запутанное, но несмотря на это он пользуется большой популярностью у любителей собирать роботов! Поэтому мы немного расскажем о том, как 28byj-48 подключить к Arduino. В первую очередь нам понадобиться драйвер ULN2003APG. Это очень дешевая железяка, встречается как готовая плата с разъемами, так и просто чип с голыми ножками. Сначала посмотрим, как подключать второй вариант.
На данной картинке покано подключение двух шаговых двигателей к плате Arduino Nano. C обратной стороны драйвера все ножки соединяем с цифровыми пинами, кроме крайней правой — ее ведем к GND. При программировании вам потребуется осуществить настройку моторов к пинам и в этом случае необходимо указать правильную последовательность: оранжевый, синий, желтый, розовый. Именно в таком порядке необходимо будет подавать управляющий сигнал с ножек микропроцессора. Как видно на рисунке, красный провод левого коннектора не попадает на ULN2003APG — его необходимо соединить с выходом 5V или VIN.
Как видно на рисунке, красный провод левого коннектора не попадает на ULN2003APG — его необходимо соединить с выходом 5V или VIN.
Есть более простой способ подключения шаговика 28byj-48 через готовую плату с коннектором:
На всякий случай приведем распиновку драйвера:
На этом у нас все, если будут вопросы — всегда готовы ответить!
Выбор и подключение шаговых двигателей
Платы Duet используют биполярные драйверы шаговых двигателей. Это означает, что вы можете использовать шаговые двигатели, подходящие для биполярного привода, которые имеют 4, 6 или 8 проводов. Вы не можете использовать двигатели с 5 проводами, потому что они предназначены для работы только в униполярном режиме. (Некоторые униполярные двигатели можно превратить в биполярные, вырезав дорожку на печатной плате.)
Проще всего подключить 4-проводные двигатели. Внутри шагового двигателя находятся две катушки, каждая из которых имеет провод, соединенный с каждым концом. Пары провода и катушки называются фазой. 4 провода сопоставляются с 4 выходными контактами каждого драйвера шагового двигателя на Duet (обозначение фаз и подключение см. ниже).
Пары провода и катушки называются фазой. 4 провода сопоставляются с 4 выходными контактами каждого драйвера шагового двигателя на Duet (обозначение фаз и подключение см. ниже).
В 6-проводных шаговых двигателях по-прежнему есть 2 катушки, но каждая катушка имеет центральный отвод, который при необходимости разрезает катушку пополам. Это создает дополнительный провод для каждой катушки. Вы можете запустить их в режиме половинной катушки, оставив два концевых провода неподключенными, или в режиме полной катушки, оставив центральные провода неподключенными. См. спецификацию двигателя, чтобы убедиться, что ваш Duet может обеспечить достаточный ток для того, как вы хотите их подключить.
8-проводной шаговый двигатель имеет 4 катушки, поэтому с двумя проводами на катушку получается 8 проводов. Вы можете запустить 8-проводной шаговый двигатель в режиме половинной катушки (только с двумя подключенными катушками) или в режиме полной катушки, а в режиме полной катушки вы можете выбрать последовательное или параллельное соединение катушек.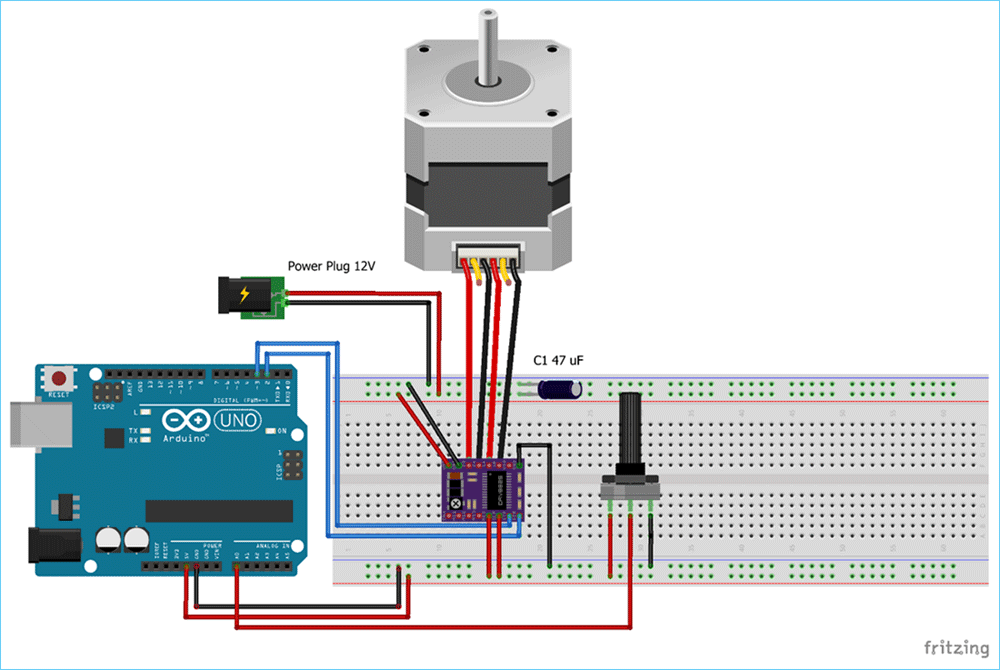 В Интернете есть много другой документации о том, как это сделать, просто убедитесь, что Duet может справиться с текущими требованиями. В конечном счете, для подключения к Дуэту нам по-прежнему нужно всего 4 провода.
В Интернете есть много другой документации о том, как это сделать, просто убедитесь, что Duet может справиться с текущими требованиями. В конечном счете, для подключения к Дуэту нам по-прежнему нужно всего 4 провода.
Это максимальный ток, который вы можете пропустить через обе обмотки одновременно. Максимальный ток через одну обмотку (что действительно имеет значение при использовании микрошага) редко указывается и будет немного выше. Однако, даже если одна обмотка работает при указанном номинальном токе, двигатель сильно нагревается. Таким образом, обычная практика заключается в том, чтобы установить ток двигателя не более 85% от номинального тока. Поэтому, чтобы получить максимальный крутящий момент от ваших двигателей без их перегрева, вы должны выбирать двигатели с номинальным током не более чем на 25% выше рекомендуемого максимального тока шагового драйвера. Это дает:
- Duet 0.6 и Duet 0.8.5 (рекомендуемый максимальный ток двигателя 1,5 А пик) => Номинальный ток шагового двигателя <= 1,9 А
- Duet 2 WiFi и Duet 2 Ethernet (максимальный ток двигателя 2,5 А пик) => Шаговый двигатель номинальный ток <= 3,0 А
- Duet 2 Maestro (максимальный ток двигателя 1,6 А при хорошем охлаждении вентилятором) => Номинальный ток шагового двигателя <= 1,7 А. Однако, если вы используете двигатели с более низким номинальным током (например, от 1,0 до 1,2 А) и мощностью 24 В, драйверы будут работать с меньшей температурой.
- Duet 3 Материнская плата 6HC и плата расширения 3HC (рекомендуемый максимальный ток двигателя 6,3 А пик./4,45 А среднеквадратичное значение) => Номинальный ток шагового двигателя <= 6 А
- Duet 3 Toolboard (рекомендуемый максимальный ток двигателя 1,4 А пик) => Шаговый двигатель номинальный ток <= 1,75 А
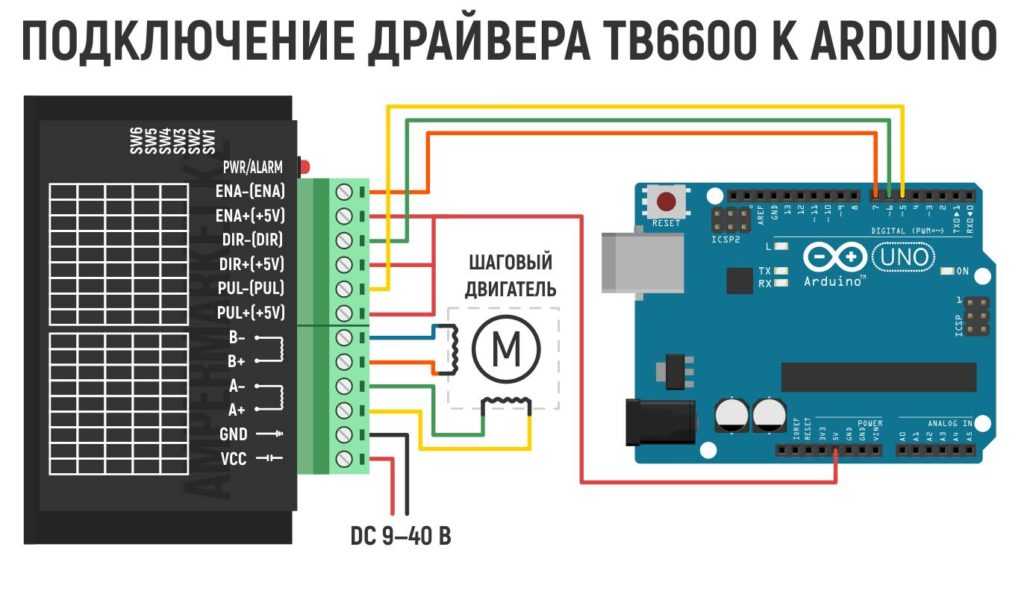 Однако, если вы используете двигатели с более низким номинальным током (например, от 1,0 до 1,2 А) и мощностью 24 В, драйверы будут работать с меньшей температурой.
Однако, если вы используете двигатели с более низким номинальным током (например, от 1,0 до 1,2 А) и мощностью 24 В, драйверы будут работать с меньшей температурой. Это максимальный крутящий момент, который двигатель может обеспечить, когда обе обмотки находятся под напряжением при полном токе, прежде чем он начнет скачкообразно. Удерживающий момент с одной обмоткой, находящейся под напряжением при номинальном токе, примерно в 1/sqrt(2) раза больше. Крутящий момент пропорционален току (за исключением очень малых токов), поэтому, например, если вы установите драйверы на 85 % от номинального тока двигателя, то максимальный крутящий момент составит 85 % * 0,707 = 60 % от указанного удерживающего момента.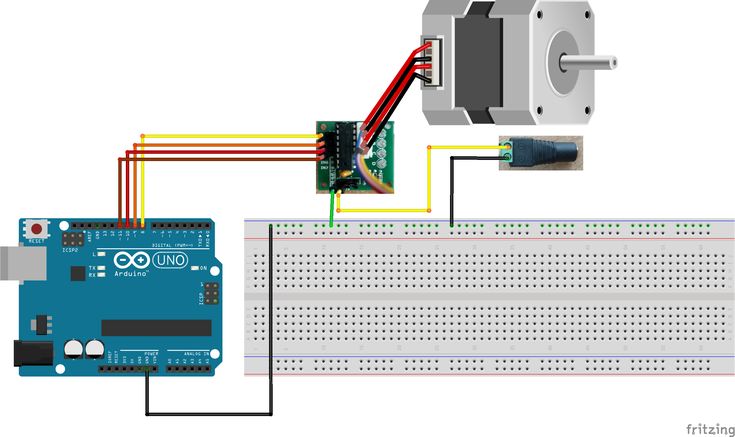
Крутящий момент создается, когда угол ротора отличается от идеального угла, соответствующего току в его обмотках. Когда шаговый двигатель ускоряется, он должен создавать крутящий момент, чтобы преодолеть инерцию собственного ротора и массу нагрузки, которую он приводит в движение. Чтобы создать этот крутящий момент, угол ротора должен отставать от идеального угла. В свою очередь, загрузка будет отставать от позиции, заданной прошивкой.
Иногда пишут, что микрошаг снижает крутящий момент. На самом деле это означает, что когда угол запаздывания считается равным углу, соответствующему одному микрошагу (потому что вы хотите, чтобы положение было точным с точностью до одного микрошага), более высокий шаг микрошага подразумевает меньший угол запаздывания и, следовательно, меньший крутящий момент. Крутящий момент на единицу угла запаздывания (а это действительно важно) не уменьшается с увеличением микрошага. Иными словами, отправка двигателю одного микрошага 1/16 приводит к точно таким же фазным токам (и, следовательно, тем же силам), что и отправка ему двух микрошагов 1/32 или четырех микрошагов 1/64 и так далее.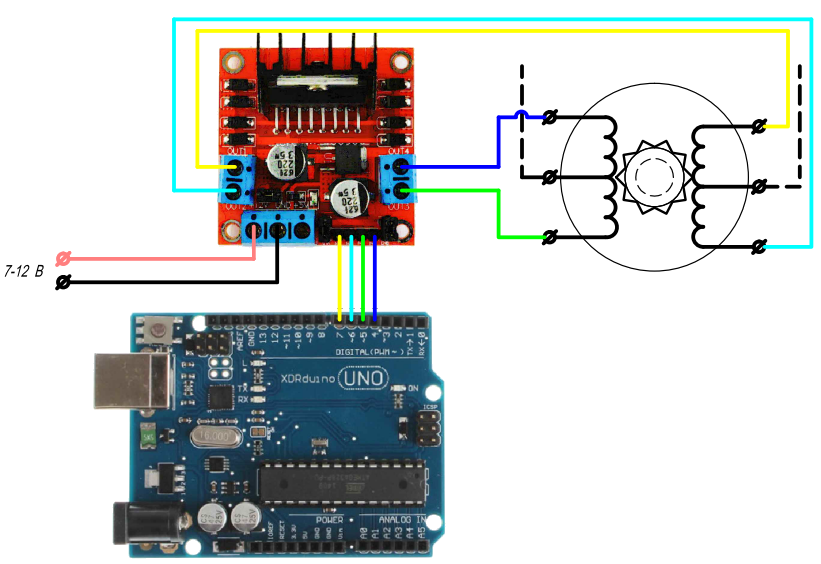
Существует два соответствующих размера: номер размера Nema и длина. Номер размера Nema определяет квадратный размер корпуса и расположение монтажных отверстий. Самый популярный размер для 3D-принтеров — Nema 17, который имеет корпус не более 42,3 кв. мм и крепежные отверстия в квадрате со стороной 31 мм.
Nema 17 Двигатели бывают различной длины: от 20-миллиметровых «блинчатых» двигателей до 60-миллиметровых двигателей. Как правило, чем длиннее двигатель, тем больше его удерживающий момент при номинальном токе. Более длинные шаговые двигатели также имеют большую инерцию ротора. Все Duet должны быть в состоянии управлять ими, хотя некоторые двигатели Nema 17 могут быть рассчитаны на ток до 2 А, что является пределом Duet 2 Maestro (хотя вы всегда можете использовать двигатели с меньшим током).
Двигатели Nema 23 имеют более высокий крутящий момент, чем двигатели Nema 17. Duet 2 (WiFi и Ethernet) может управлять ими, если вы тщательно их выбираете, в частности, в отношении номинального тока, максимум до 2,8 А. Duet 3 должен управлять двигателями большей мощности до 5,5 А. Вы должны использовать питание 24 В для Duet 2 и питание 32 В для Duet 3 для более крупных двигателей.
Duet 3 должен управлять двигателями большей мощности до 5,5 А. Вы должны использовать питание 24 В для Duet 2 и питание 32 В для Duet 3 для более крупных двигателей.
Двигатели Nema 34 еще крупнее, с большим крутящим моментом и обычно используются в приложениях с ЧПУ. Duet 3 также может управлять этими двигателями до 5,5 А. Для достижения высоких скоростей с большими двигателями вам может потребоваться более высокое напряжение, чем максимальное 32 В для Duet 3. Можно модифицировать Duet 3, чтобы увеличить это напряжение до 48 В и, возможно, до 60 В (что является пределом шагового драйвера). хотя это аннулирует вашу гарантию; см. https://forum.duet3d.com/post/133293
Существует два общих угла шага: 0,9 и 1,8 градуса на полный шаг, что соответствует 400 и 200 шагам/оборот. В большинстве 3D-принтеров используются двигатели с шагом 1,8 градуса.
Помимо очевидной разницы в угле шага:
- Моторы с углом поворота 0,9° имеют несколько меньший удерживающий момент, чем аналогичные двигатели с углом поворота 1,8° того же производителя
- чуть больше половины угла запаздывания аналогичного мотора с углом поворота 1,8 градуса. Или, другими словами, при малых углах запаздывания 0,9Двигатель с углом наклона 1,8 градуса имеет почти в два раза больший крутящий момент, чем двигатель с углом поворота 1,8 градуса, при том же угле запаздывания.
- При заданной скорости вращения двигатель с углом поворота 0,9° производит вдвое большую противо-ЭДС индуктивности, чем двигатель с углом поворота 1,8°. Таким образом, вам обычно нужно использовать питание 24 В для достижения высоких скоростей с двигателями 0,9 градуса.
- Двигатели с углом поворота 0,9° нуждаются в шаговых импульсах, которые должны подаваться на драйверы с удвоенной скоростью по сравнению с двигателями с углом поворота 1,8°. Если вы используете высокий микрошаг, то скорость может быть ограничена скоростью, с которой электроника может генерировать шаговые импульсы. Для решения этой проблемы можно использовать режим интерполяции с 16-кратным микрошагом драйверов TMC2660 на Duet 2 WiFi/Ethernet. Драйверы Duet 2 Maestro и Duet 3 могут выполнять интерполяцию при любых настройках микрошага.
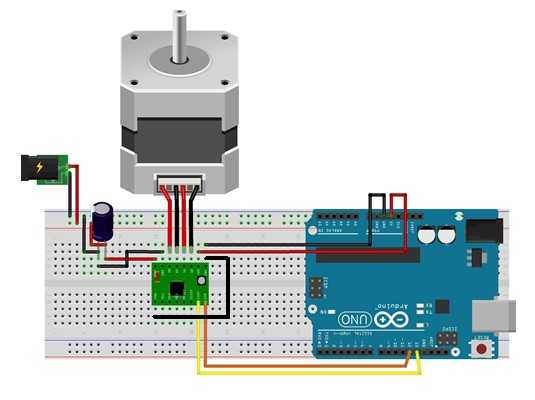 Или, другими словами, при малых углах запаздывания 0,9Двигатель с углом наклона 1,8 градуса имеет почти в два раза больший крутящий момент, чем двигатель с углом поворота 1,8 градуса, при том же угле запаздывания.
Или, другими словами, при малых углах запаздывания 0,9Двигатель с углом наклона 1,8 градуса имеет почти в два раза больший крутящий момент, чем двигатель с углом поворота 1,8 градуса, при том же угле запаздывания.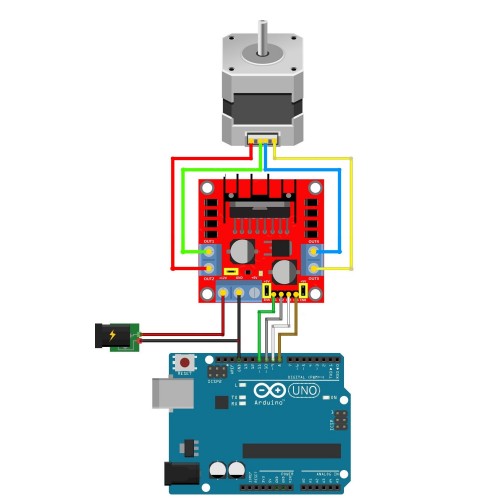
Индуктивность двигателя влияет на то, насколько быстро драйвер шагового двигателя может управлять двигателем до того, как крутящий момент упадет. Если мы временно проигнорируем противоЭДС из-за вращения (см. далее) и номинальное напряжение двигателя намного меньше, чем напряжение питания драйвера, то максимальное число оборотов в секунду до того, как крутящий момент упадет:
оборотов в секунду = (2 * напряжение питания)/ (шаги_на_оборот * пи * индуктивность * ток)
Если двигатель приводит в движение ремень GT2 через шкив, это дает максимальную скорость в мм/сек как:
скорость = (4 * шкив_зуб * питающее_напряжение)/(шагов_на_оборот * пи * индуктивность * ток)
Пример: двигатель с шагом 1,8 град/шаг (т. а привод ремня GT2 со шкивом с 20 зубьями начал бы терять крутящий момент примерно при 250 мм/сек. Это скорость ленты, которая на CoreXY или дельта-принтере не совпадает со скоростью головки.
На практике крутящий момент упадет раньше из-за противо-ЭДС, вызванной движением, и из-за того, что вышеуказанное не учитывает сопротивление обмотки. Двигатели с малой индуктивностью также имеют низкую противо-ЭДС из-за вращения.
Двигатели с малой индуктивностью также имеют низкую противо-ЭДС из-за вращения.
Это означает, что если мы хотим достичь высоких скоростей, нам нужны двигатели с малой индуктивностью и высокое напряжение питания. Максимальное рекомендуемое напряжение питания для Duet 2 WiFi/Ethernet — 25 В, для Duet 2 Maestro — 28 В, для Duet 3 — 32 В.
Это просто сопротивление на фазу и падение напряжения на каждой фазе, когда двигатель остановлен и фаза проходит через свой номинальный ток (который является произведением сопротивления и номинального тока). Это неважно, за исключением того, что номинальное напряжение должно быть значительно ниже напряжения питания шаговых драйверов.
Когда шаговый двигатель вращается, он создает противо-ЭДС. При идеальном нулевом угле запаздывания он на 90 градусов не совпадает по фазе с управляющим напряжением и совпадает по фазе с противо-ЭДС из-за индуктивности. Когда двигатель создает максимальный крутящий момент и находится на грани пропуска шага, он находится в фазе с током.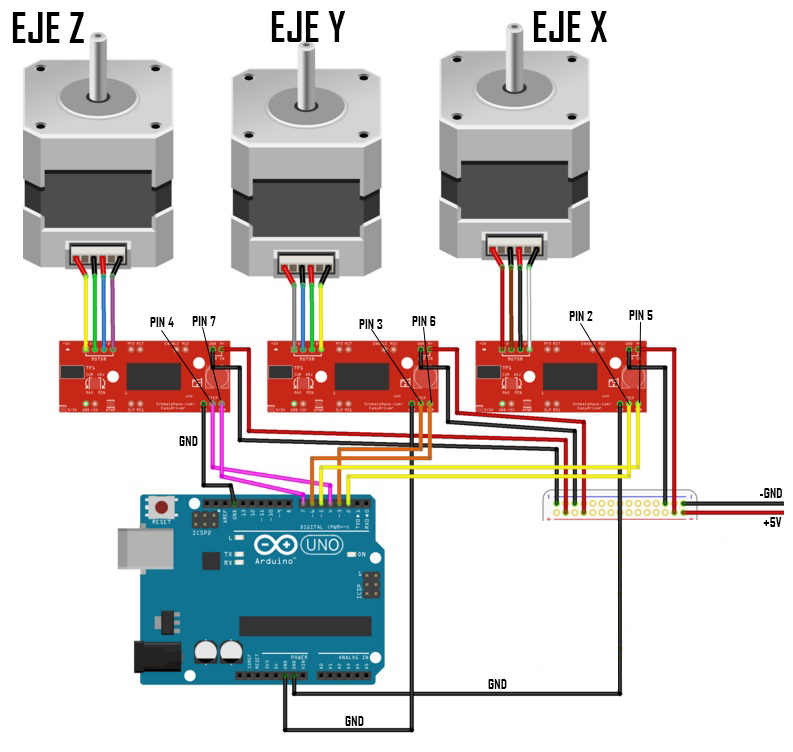
Обратная ЭДС из-за вращения обычно не указывается в технических характеристиках, но мы можем оценить ее по следующей формуле:0003
В формуле предполагается, что удерживающий момент указан для обеих фаз, находящихся под напряжением при номинальном токе. Если указано, что под напряжением находится только одна фаза, замените sqrt(2) на 2.
Пример: рассмотрим 200-шаговый двигатель, приводящий в движение каретку с помощью 20-зубчатого шкива и ремня GT2. Это 40 мм движения на оборот. Для достижения скорости 200мм/сек нам нужно 5 об/сек. Если мы используем двигатель с удерживающим моментом 0,55 Нм, когда обе фазы приводятся в действие при 1,68 А, пиковая противо-ЭДС из-за вращения составляет 1,414 * 3,142 * 0,55 * 5/1,68 = 7,3 В.
Насколько точна эта формула? dc42 измерил, а затем рассчитал противоЭДС для двух типов двигателей:
- 17HS19-1684S: измерено 24 В, рассчитано 24,24 В, предполагая, что удерживающий момент указан с обеими фазами, запитанными при номинальном токе.
- JK42HS34-1334A: измерено 22 В, рассчитано 15,93 В при удерживающем крутящем моменте 0,22 Нм, обе фазы включены при номинальном токе. Возможно, удерживающий момент для этого двигателя указан при включенной только одной фазе, и в этом случае расчетное значение становится равным 22,53 В. Я также видел удерживающий момент для этого двигателя, указанный в другой таблице данных как 0,26 Нм, что увеличивает расчетное значение до 18,05 В.
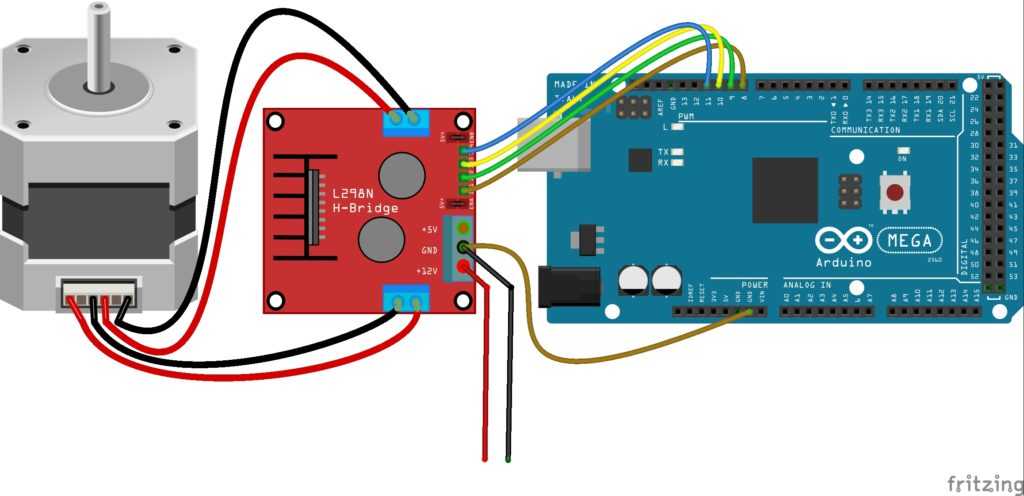
Если у вас есть целевая скорость перемещения вашего принтера, вы можете хотя бы приблизительно определить, какое напряжение питания вам потребуется для драйверов двигателей. Вот как, с примером расчета:
- Определитесь с целевой скоростью движения. Для этого примера я буду использовать 200 мм/сек.
- Исходя из заданной скорости движения, определите максимальную скорость ленты для наихудшего случая. Для декартового принтера наихудшим случаем является чистое движение по осям X или Y, поэтому скорость ленты в наихудшем случае совпадает со скоростью движения. Для принтера CoreXY наихудшим случаем является диагональное движение, и соответствующая скорость ленты в sqrt(2) раз превышает скорость движения. Для дельта-принтера наихудший случай — это радиальное движение у края платформы, а наихудшая скорость ленты — это скорость движения, деленная на тангенс (тета), где тета — это наименьший угол диагонального стержня к горизонтали. На практике мы не можем использовать целевую скорость перемещения для радиальных перемещений вплоть до края кровати из-за расстояния, необходимого для ускорения или замедления, поэтому примите тета как угол, когда сопло находится примерно в 10 мм от края кровати. напротив башни. Для моей дельты это 30 градусов, поэтому максимальная скорость ленты составляет 200/тангенс (30 градусов) = 346 мм/сек.
- Определите число оборотов двигателя в секунду при максимальной скорости ремня, разделив скорость ремня на шаг зубьев ремня (2 мм для ремней GT2) и количество зубьев на шкиве. В моей дельте используются шкивы с 20 зубьями, поэтому максимальное число оборотов в секунду составляет 346/(2 * 20) = 8,7.
- Определите пиковую противо-ЭДС из-за индуктивности. Это число оборотов в секунду * пи * ток_двигателя * индуктивность_двигателя * N/2, где N — количество полных шагов на один оборот (то есть 200 для двигателей с углом поворота 1,8 градуса или 400 для двигателей с углом поворота 0,9 градуса). Мои моторы 0,9градус с индуктивностью 4,1 мГн, и я обычно запускаю их на 1 А. Таким образом, противо-ЭДС из-за индуктивности составляет 8,7 * 3,142 * 1,0 * 4,1e-3 * 400/2 = 22,4 В.
- Определите приблизительную противо-ЭДС вращения. Из приведенной ранее формулы это sqrt(2) * pi * rated_holding_torque * revs_per_second / rated_current. Мои двигатели имеют номинальный ток 1,68 А и удерживающий момент 0,44 Нм, поэтому результат 1,414 * 3,142 * 0,44 * 8,7/1,68 = 10,1 В
- Желательно, чтобы напряжение питания драйвера было не меньше суммы этих двух противо-ЭДС , плюс еще несколько вольт. Если у вас есть два двигателя последовательно, то требуемое напряжение удваивается.
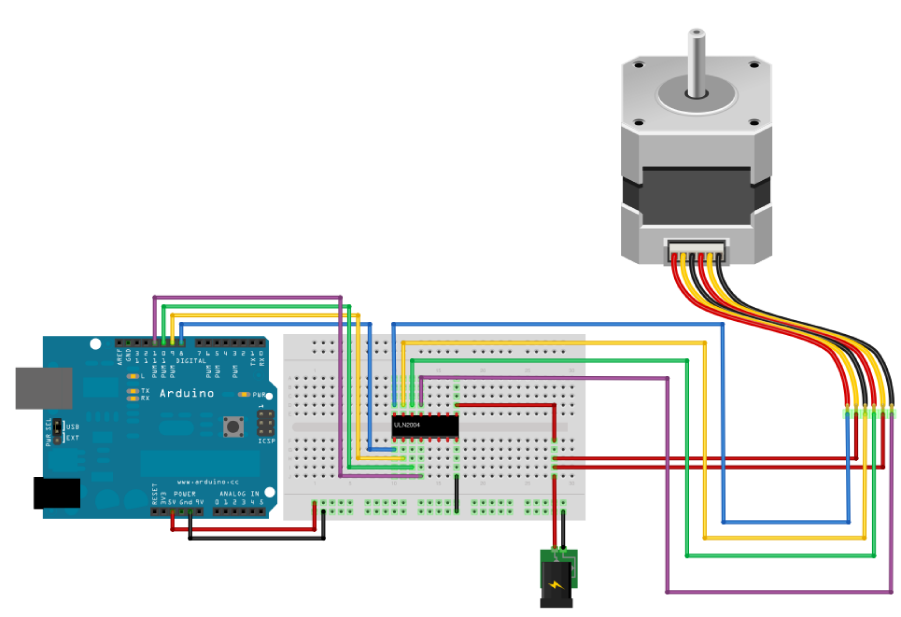 Для принтера CoreXY наихудшим случаем является диагональное движение, и соответствующая скорость ленты в sqrt(2) раз превышает скорость движения. Для дельта-принтера наихудший случай — это радиальное движение у края платформы, а наихудшая скорость ленты — это скорость движения, деленная на тангенс (тета), где тета — это наименьший угол диагонального стержня к горизонтали. На практике мы не можем использовать целевую скорость перемещения для радиальных перемещений вплоть до края кровати из-за расстояния, необходимого для ускорения или замедления, поэтому примите тета как угол, когда сопло находится примерно в 10 мм от края кровати. напротив башни. Для моей дельты это 30 градусов, поэтому максимальная скорость ленты составляет 200/тангенс (30 градусов) = 346 мм/сек.
Для принтера CoreXY наихудшим случаем является диагональное движение, и соответствующая скорость ленты в sqrt(2) раз превышает скорость движения. Для дельта-принтера наихудший случай — это радиальное движение у края платформы, а наихудшая скорость ленты — это скорость движения, деленная на тангенс (тета), где тета — это наименьший угол диагонального стержня к горизонтали. На практике мы не можем использовать целевую скорость перемещения для радиальных перемещений вплоть до края кровати из-за расстояния, необходимого для ускорения или замедления, поэтому примите тета как угол, когда сопло находится примерно в 10 мм от края кровати. напротив башни. Для моей дельты это 30 градусов, поэтому максимальная скорость ленты составляет 200/тангенс (30 градусов) = 346 мм/сек.
В моем примере это дает 32,5 В, что выше рекомендуемого входного напряжения 25 В для Duet 2. Но, по крайней мере, мы знаем, что для наихудшего случая дельта-движения со скоростью перемещения 200 мм/с, если я использую 24 В подача, то это составляет более 2/3 теоретического значения, поэтому крутящий момент, доступный для этого движения, не должен падать более чем примерно на 1/3 от обычного доступного крутящего момента. С другой стороны, источника питания 12 В явно недостаточно, что объясняет, почему я смог достичь только 150 мм/сек до того, как перевел принтер на 24 В.
Но, по крайней мере, мы знаем, что для наихудшего случая дельта-движения со скоростью перемещения 200 мм/с, если я использую 24 В подача, то это составляет более 2/3 теоретического значения, поэтому крутящий момент, доступный для этого движения, не должен падать более чем примерно на 1/3 от обычного доступного крутящего момента. С другой стороны, источника питания 12 В явно недостаточно, что объясняет, почему я смог достичь только 150 мм/сек до того, как перевел принтер на 24 В.
На https://www.reprapfirmware.org/ есть онлайн-калькулятор, позволяющий сделать это наоборот (т. е. рассчитать скорость, при которой крутящий момент начинает падать).
Общие рекомендации
- Если вы не будете использовать внешние драйверы шаговых двигателей, выбирайте двигатели с номинальным током не менее 1,2 А и не более 2,0 А для Duet 0,6 и Duet 0,8,5, 3 А для Duet 2. , 7 А для основной платы и платы расширения Duet 3 и 1,7 А для инструментальных плат Duet 3 или Duet 2 Maestro .
- Запланируйте работу каждого шагового двигателя при токе от 50% до 85% от его номинального значения.
- Размер: Nema 17 — самый популярный размер, используемый в 3D-принтерах. Nema 14 является альтернативой высокопроизводительному экструдеру. Используйте двигатели Nema 23, если вы не можете получить достаточный крутящий момент от длинных двигателей Nema 17. Duet 3 также может управлять двигателями Nema 34.
- Избегайте двигателей с номинальным напряжением (или произведением номинального тока и сопротивления фазы) > 4 В или индуктивностью > 4 мГн.
- Выбирайте шаговые двигатели с углом поворота 0,9°, если требуется дополнительная точность позиционирования, например для башенных двигателей дельта-принтера. В противном случае выберите 1,8-градусные/шаговые двигатели.
- Если вы используете любые двигатели с шагом 0,9 градуса или двигатели с высоким крутящим моментом, используйте питание 24 В, чтобы вы могли поддерживать крутящий момент на более высоких скоростях.
- При использовании экструдера с большим редуктором (например, экструдера, в котором используется гибкий приводной кабель для передачи крутящего момента от двигателя к червячному редуктору), используйте для его привода короткий малоиндуктивный двигатель с шагом 1,8 градуса.


Номера приводов, используемые в G-коде, соответствуют следующим меткам драйверов на плате(ах):
| Drive number | Duet 3 board label | Duet 2 WiFi/Ethernet board label | Duet 2 Maestro board label |
|---|---|---|---|
| 0 | DRIVER_0 | X | |
| 1 | DRIVER_1 | Y | |
| 2 | DRIVER_2 | ZA ZB (Two headers wired in series) | |
| 3 | DRIVER_3 | E0 | |
| 4 | DRIVER_4 | E1 | |
| 5 | DRIVER_5 | E2 (On Duex 2/5) | E2 (pins for external driver) |
| 6 | E3 (On Duex 2/5) | E3 ( pins for external driver) | |
| 7 | E4 (On Duex 5) | ||
| 8 | E5 (On Duex 5) | ||
| 9 | E6 (On Duex 5) | ||
| 10 | на заголовке LCD_CONN | ||
| 11 | на заголовке LCD_CONN | ||
, чтобы увидеть точное местоположение Pins.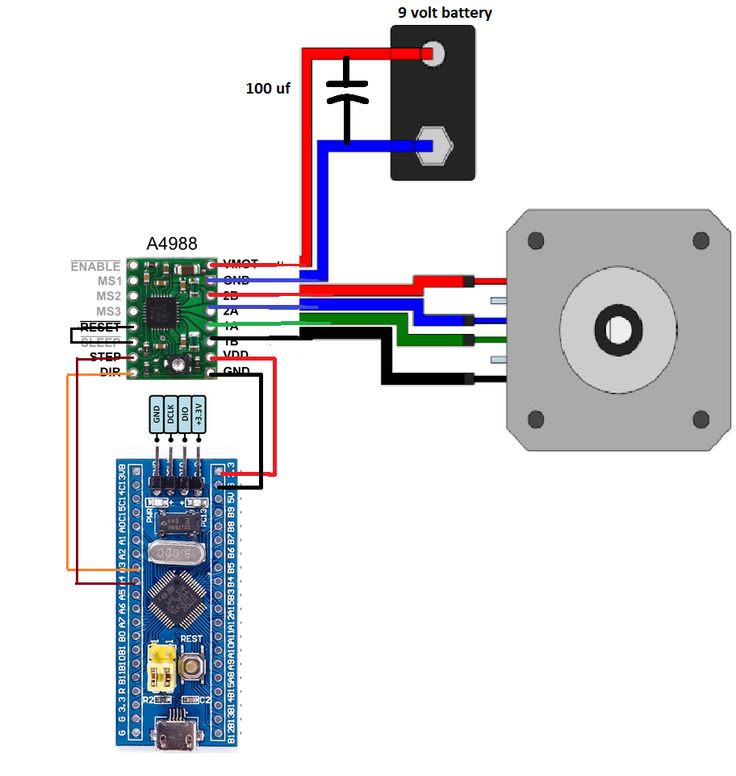
Схема подключения Duet 2 Maestro
Duet 3 имеет 6 встроенных драйверов шаговых двигателей. Duet 2 WiFi, Ethernet и Maestro имеют 5 встроенных шаговых драйверов.
Для подключения шаговых двигателей к внутренним драйверам см. схему подключения Duet 3, схему подключения Duet 2 WiFi/Ethernet или схему подключения Duet 2 Maestro. Распиновка каждого разъема шагового двигателя такая же, как и у другой популярной электроники для 3D-принтеров.
Для ВСЕХ DUETS необходимо подключить два провода одной фазы шагового двигателя к двум контактам на одном конце разъема, а провода другой фазы к двум контактам на другом конце. См. следующий раздел, чтобы определить фазы вашего двигателя.
Каждый разъем шагового двигателя имеет четыре контакта. На Duet 2 WiFi/Ethernet они помечены «2B 2A 1A 1B» на задней стороне платы и на электрической схеме. «1» и «2» относятся к катушке или фазе, «A» и «B» относятся к положительному и отрицательному.
На Duet 2 Maestro и Duet 3 четыре контакта разъема двигателя помечены «B1 B2 A1 A2» на задней стороне платы и на электрической схеме. «А» и «В» относятся к катушке или фазе, «1» и «2» относятся к положительному и отрицательному. Это соглашение об именах, используемое большинством производителей шаговых двигателей.
Внимание! Перепутывание фаз на 4-контактном разъеме может и часто приводит к повреждению драйвера шагового двигателя. Поэтому убедитесь, что вы знаете, какие пары проводов относятся к одной фазе. Неважно, какую фазу вы подключаете к какой паре контактов или каким образом вы подключаете каждую фазу: перестановка двух фаз или перестановка пары проводов в фазе просто заставляет двигатель вращаться в другую сторону, которую вы может поправить в файле config.g.
Будьте особенно осторожны при использовании шаговых двигателей со съемными кабелями! Двигатель Nema 17 со съемным кабелем обычно имеет 6-контактный разъем JST, но разные производители используют разные выводы для этого разъема. Всегда проверяйте фазы шагового двигателя (см. следующий раздел) при использовании двигателей со съемными кабелями.
Настоятельно рекомендуется заземлять кожухи шаговых двигателей , особенно в принтерах с ременным приводом. В противном случае движение ремней вызывает накопление статического заряда, который в конечном итоге распространяется на обмотки. Движение нити в экструдере также может вызвать накопление статического заряда на приводном двигателе экструдера. Если двигатели прикручены к металлической раме, достаточно заземлить раму.
Вот два способа соединения проводов шагового двигателя с фазами:
- Используйте мультиметр. Между двумя проводами, относящимися к одной фазе, должно быть сопротивление в несколько Ом, а между проводами, принадлежащими разным фазам, не должно быть непрерывности.
- Ни к чему не подсоединенные провода двигателя, покрутите шпиндель между пальцами. Замкните два провода вместе, затем снова поверните шпиндель. Если крутить намного труднее, чем раньше, эти два провода относятся к одной и той же фазе. В противном случае попробуйте еще раз с другой парой проводов, закороченных вместе.
Если у вас есть два шаговых двигателя Z, подключите их к разъемам ZA и ZB. Эти разъемы соединены последовательно, что лучше, чем параллельное соединение для большинства типов шаговых двигателей, используемых в 3D-принтерах.
Если у вас есть только один шаговый двигатель Z, подключите его к разъему ZA и подключите две перемычки к разъему ZB. Платы Duet 2 обычно поставляются с уже установленными перемычками.
Если у вас есть два шаговых двигателя Z, то для типов двигателей, обычно используемых в RepRap (т. е. с номинальным током в диапазоне от 1,2 до 2,0 А), лучше подключать их последовательно, чем параллельно. Погуглите «последовательное подключение шаговых двигателей» для инструкций как это сделать например:
http://www.instructables.com/id/Wiring-Y…]
Некоторые недавние комплекты китайских 3D-принтеров имеют слаботочные шаговые двигатели Z, которые вместо этого предназначены для параллельного соединения. Если двигатели имеют номинальный ток 1,0 А или ниже, подключите их параллельно.
Используйте команду M584 (см. http://reprap.org/wiki/G-code#M584:_Set_…), чтобы указать, какие драйверы используются для соответствующей оси. Вы должны использовать RepRapFirmware 1.14 или более позднюю версию.
Дополнительные сведения см. на странице использования внешних драйверов
Если ваши двигатели рассчитаны на ток выше примерно 2,8 А и вы используете Duet 2 (Wi-Fi или Ethernet), или выше примерно 2 А и вы используете Duet 2 Maestro, или устаревшие версии Duet 0,6 или 0,8,5, или если они нужны более высокое напряжение, чем может обеспечить Duet, вам потребуются внешние драйверы шагового двигателя. Как правило, они имеют оптически изолированные входы step/dir/enable. Например, драйверы шаговых двигателей с номинальным током до 5 А, использующие микросхему драйвера шагового двигателя TB6600, широко доступны на eBay.
Если драйверам требуется не более 2 мА при 3 В на входах step, dir и enable, то их можно подавать напрямую с разъема расширения Duet. См. схемы подключения Duet 2 WiFi/Ethernet для получения информации о выводах разъема расширения. В противном случае вы должны использовать микросхемы сдвига уровня от 3,3 В до 5 В, такие как 74HCT04, чтобы повысить уровень сигнала до 5 В и управлять ими. Для этой цели вы можете использовать разделительную доску Duet Expansion Breakout Board.
Чтобы переназначить двигатели X, Y или Z на внешние драйверы в RepRapFirmware 1.14 или более поздней версии, используйте команду M584 (см. G-код M584). Сигналы включения на разъеме расширения по умолчанию активны низким уровнем, но вы можете изменить это с помощью команды M569 (см. G-код M569). Вы также можете установить минимальную ширину импульса шага в команде M569 (попробуйте 1 мкс или 2 мкс при использовании внешних драйверов) и настроить направление.
Перед выполнением этого шага временно разрешите перемещение оси без возврата в исходное положение, перейдя к консоли G-кода и введя: M564 S0 H0
Вернитесь на страницу управления машиной. В это время мы проверим работу наших шаговых двигателей.
Переместите каждый шаговый двигатель по отдельности на 1 мм в каждом направлении.
Обратите внимание, что шаговый двигатель не может быть перемещен до возврата в исходное положение, если только команда M564 не используется для отмены этого безопасного значения по умолчанию.
шаговые двигатели [smoothieware.org]
Немного теории:
« Шаговый двигатель (или шаговый двигатель) представляет собой бесщеточный электродвигатель постоянного тока, который делит полный оборот двигателя на ряд равных шагов. Затем можно дать команду двигателю перемещаться и удерживаться на одном из этих шагов без какого-либо датчика обратной связи (контроллер с разомкнутым контуром).
Поскольку они работают пошагово, и вы можете точно контролировать, сколько шагов вы двигаете в каждом направлении, шаговые двигатели — это очень практичный способ перемещения вещей в желаемое положение. Это делает их идеальными для большинства приложений с ЧПУ.
Smoothie поставляется с драйверами шаговых двигателей, предназначенными для биполярных шаговых двигателей, с максимальным номинальным током 2 ампера.
Выбор шаговых двигателей
Существует очень большое разнообразие шаговых двигателей. Моторы большего размера, как правило, более мощные. Для данного размера двигатели будут иметь разные крутящие моменты, максимальные скорости и разные возможности для поддержания крутящего момента при увеличении скорости.
Важно правильно выбрать двигатель для своего применения. Наиболее распространенной ошибкой является выбор двигателя с высокой индуктивностью. Существует два основных «семейства» двигателей: двигатели с высокой индуктивностью в основном предназначены для поддержания положения и редкого перемещения (например, на монтировке телескопа), а двигатели с низкой индуктивностью предназначены для частого перемещения на высоких скоростях (например, на монтировке телескопа). фрезерный станок с ЧПУ или 3D-принтер).
Если вы используете шаговый двигатель с высокой индуктивностью со Smoothieboard (или любым драйвером шагового двигателя с ЧПУ), вы не только получите плохие характеристики скорости/крутящего момента, но и при перемещении шагового двигателя (или оси) вручную будет очень высокое напряжение. быть сгенерированы, что может разрушить ваш драйвер шагового двигателя.
Вы можете распознать шаговый двигатель с «высокой индуктивностью» по тому факту, что его номинальная индуктивность высока, обычно выше, чем 10 мГн. — это плохо. Если ваш двигатель не сообщает вам свою индуктивность, номинальное напряжение также является признаком: шаговые двигатели с высокой индуктивностью обычно имеют высокое номинальное напряжение, типичное значение составляет 12 В , где шаговые двигатели с ЧПУ имеют напряжение ниже 5 В. Это не то, что вам нужно, вам нужен шаговый двигатель с низкой индуктивностью, с индуктивностью в идеале ниже 10 мГн и номинальным напряжением в идеале ниже 5 В.
Сообщество reprap определяет хороший шаговый двигатель следующим образом:
Идеальный шаговый двигатель (для принтеров для повторной наплавки и подобных небольших ЧПУ с микрошаговыми драйверами при питании 12–24 В) размера NEMA17, номинальный ток от 1,5 до 1,8 А или менее, сопротивление обмотки 1–4 Ом, от 3 до 8 мГн, 62 унции дюйма (0,44). Нм, 4,5 кг.см) или более крутящего момента, 1,8 или 0,9 градуса на шаг (200/400 шагов/об соответственно), например кысан 1124090/42BYGh5803 или раттм 17HS8401 или Wantai
Проводка шагового двигателя
Будь осторожен с катушками
Проводка
Прямая проводка
Биполярные шаговые двигатели имеют два полюса (биполярные). Каждый полюс соединен с двумя проводами. Это 4 провода, выходящие из вашего шагового двигателя. Они должны быть подключены к вашему Smoothieboard.
Для этого каждый драйвер шагового двигателя на Smoothieboard имеет 4 соединения. (Драйверы шаговых двигателей имеют маркировку M1, M2 и т. д.)
Сложность часто заключается в том, чтобы выяснить, какие провода подключаются к каким полюсам. Если вы просто подключите что-то наугад, у вас есть шанс, что это сработает, но давайте подойдем к этому с научной точки зрения. Несколько методов:
Документация: Посмотрите на свой мотор, найдите его артикул. Тогда погуглите. Если вам повезет, вы найдете схему или техпаспорт, в котором будет указано, какой провод идет к какому полюсу. Обратите внимание на цвета, соответствующие каждой катушке.
Пальцы: Когда два провода для данного полюса соприкасаются друг с другом, создается замкнутая цепь для этого полюса. Это затрудняет вращение шагового двигателя. Вы можете использовать этот эффект для обнаружения полюсов. Поверните вал шагового двигателя, он должен вращаться свободно. Теперь возьмите два провода и соедините их. Снова поверните вал. Если он сопротивляется, поворачивается тяжелее, значит, вы нашли столб. Если это не так, оставьте один провод и попробуйте другой для второго.
Делайте это, пока не найдете комбинацию, которая показывает сопротивление. Как только вы найдете два провода для данной катушки, два других провода будут просто другой катушкой. Обратите внимание на цвета, соответствующие каждой катушке.Мультиметр: Настройте мультиметр на считывание сопротивления. Затем метод такой же, как и предыдущий, возьмите два провода наугад, проверьте их, за исключением того, что вы знаете, что найдете катушку, когда будете измерять электрическое сопротивление между двумя проводами. Если вы измеряете отсутствие контакта, попробуйте другую комбинацию проводов. Обратите внимание на цвета, соответствующие каждой катушке.
Теперь подключим провода к Smoothieboard. Назовем одну катушку А, а другую катушку В. Неважно, какая есть какая. Полярность также не имеет значения, меняется только направление вращения двигателя, и вы можете изменить это в файле конфигурации. Теперь просто подключите два провода к 4 контактам Smoothieboard для драйвера шагового двигателя как такового: AABB или BBAA. Другие комбинации, такие как ABBA или ABAB, не будут работать.
Как правильно подключить шаговые двигатели
Если вы не сделаете это правильно, он не будет работать должным образом
Как только ваш шаговый двигатель правильно подключен к Smoothieboard, он готов к управлению.
Подключение шагового двигателя к драйверу шагового двигателя.
В этом примере шаговый двигатель подключен к драйверу M1, а питание подается на VBB (основной ввод питания).
Внешний драйвер шагового двигателя
Если вы хотите использовать более мощные шаговые двигатели, чем могут выдержать драйверы Smoothieboard (максимум 2 А), вам необходимо использовать внешние драйверы шаговых двигателей.
Подробную информацию о том, как подключить внешний драйвер шагового двигателя к Smoothieboard, можно найти в приложении к внешнему драйверу .
Шаговый двигатель
На них часто есть полезная информация
Настройка
Примеры конфигураций доступны на github https://github. com/Smoothieware/Smoothieware/tree/edge/ConfigSamples.
Вы также можете обратиться к документации по конфигурации.
Текущий
Первое, что вам нужно сделать, это сообщить драйверам шаговых двигателей, каков номинальный ток для ваших шаговых двигателей. Чтобы правильно управлять шаговым двигателем, драйвер должен знать номинальный ток двигателя.
Каждая модель шагового двигателя имеет точный номинальный ток. Вы можете управлять шаговым двигателем при более низком токе, что сделает его более тихим, но и менее мощным. Но нельзя гонять двигатель на большем токе, чем он рассчитан. Это может привести к перегреву и, возможно, к пропуску шагов.
Рейтинг часто указывается на этикетке вашего шагового двигателя (см. рисунок справа). Если это не так, вы можете получить его, набрав в Google номер модели шагового двигателя или связавшись с продавцом или производителем.
Получив правильный рейтинг, вы можете установить соответствующий параметр в файле конфигурации.
У Smoothie есть забавный способ называть драйверы шаговых двигателей. Вместо того, чтобы называть их X, Y или Z, поскольку это не имеет смысла для недекартовых роботов, таких как дельта-роботы, мы называем драйверы греческими буквами, чтобы они не зависели от приложения руки:
| Этикетка на доске Smoothieboard | M1 | M2 | M3 | M4 | M5 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Ось в картезианской машине | x (левое вправо) | y (передняя спина) | Z (вверх вниз) | Z (вверх вниз) | Z (вниз) | Z (вниз) | Z (вверх) E1 : Второй экструдер | ||||
| Греческая буква | α (альфа) | β (бета) | γ (гамма) | δ (дельта) | ε (эпсилон) | ||||||
| Вариант конфигурации настройки тока | alpha_current | beta_current | gamma_current | delta_current | epsilon_current |
Теперь, как описано в параграфе «Распаковка», подключите плату к компьютеру, откройте файл «config» в текстовом редакторе и измените значение конфигурации для каждого драйвера шагового двигателя на правильное значение.
Например, если ваш шаговый двигатель alpha имеет номинальный ток 1,68 А, отредактируйте соответствующую строку следующим образом:
alpha_current 1.68 # X ток шагового двигателя
Сделайте это для каждого шагового двигателя, который вы должны подключить к плате. (Если у вас декартовый робот, посмотрите, какой двигатель к какому шаговому приводу подключается в таблице выше. Если вы используете другой тип манипулятора, см. конкретную документацию.)
Шаговый двигатель
Шагов на миллиметр
Драйвер шагового двигателя работает ступенчато. Он перемещается на определенное количество шагов в одном направлении, затем на определенное количество шагов в другом. Вы думаете в миллиметрах. Вы хотите, чтобы ваша машина переместилась в определенное положение в миллиметрах, а затем в другое положение в миллиметрах.
Вам нужен Smoothieboard, чтобы преобразовать миллиметры, которые вы от него просите, в шаги, понятные драйверу шагового двигателя.
Это преобразование зависит от вашего точного решения руки. Наиболее распространенным и самым простым является решение с декартовым плечом, и именно на нем мы сосредоточимся здесь. Документацию по другим решениям для рук можно найти отдельно.
В случае решения с декартовым плечом вы просто конвертируете определенное количество миллиметров в определенное количество шагов. Это опция конфигурации steps_per_millimeter, которую вы должны установить для каждого шагового двигателя.
Чтобы его вычислить, необходимо умножить определенное количество коэффициентов.
Объект, который вы перемещаете, перемещается на определенное количество миллиметров за каждый оборот шагового двигателя. (Это зависит от характеристик ремня/шкива или системы ходового винта, которую вы используете.)
Шаговый двигатель совершает определенное количество полных шагов за один оборот. Обычно это 200. (Но может быть и 400.)
Каждый шаг делится драйвером шагового двигателя на определенное количество микрошагов.
Нам нужно именно это число, а не количество полных шагов. Smoothieboard V1.1 всегда делит шаги на 32 микрошага. (16 для более старых смузибордов).
Формула выглядит следующим образом:
шагов на миллиметр = ((полные шаги на оборот) x (микрошаги на шаг)) / (миллиметры на оборот)
Чтобы помочь вам, есть удивительный калькулятор замечательного Йозефа Прусы: http://calculator.josefprusa.cz/
Как только вы узнаете правильное значение для данного драйвера шагового двигателя, установите его в файле конфигурации:
alpha_steps_per_mm 80 # Шагов на мм для альфа-степпера
Сделайте это для каждого драйвера шагового двигателя.
В случае вашего шагового двигателя экструдера принцип тот же, но значение равно 9.0560 экструдер_шагов_на_мм .
Вот два хороших видео о шагах на миллиметры:
Pronterface
Направление
Пришло время проверить ваши шаговые двигатели. Для этого вам нужно будет использовать программное обеспечение хоста, такое как Pronterface или веб-интерфейс.
Теперь подключитесь к Smoothieboard через последовательный интерфейс. Включите машину, вставив блок питания в розетку.
Теперь вам нужно переместить ось, чтобы убедиться, что шаговый двигатель вращается в правильном направлении. В Pronterface щелкните рядом с желтой стрелкой, отмеченной цифрой 9.0033 «+Х» .
Ваша ось X будет двигаться. Если он сдвинулся вправо, отлично! Все в порядке, и вам нечего менять. Если он сместился влево, вам нужно инвертировать направление этой оси.
Вы делаете это, редактируя файл конфигурации и инвертируя вывод направления для этого драйвера шагового двигателя:
alpha_dir_pin 0.5 # Пин для направления шагового альфа-канала
Становится:
alpha_dir_pin 0,5! # Пин для направления альфа шагового двигателя
Это для ваших осей. В случае вашего экструдера значение конфигурации равно extruder_dir_pin .
Сохраните файл конфигурации, перезагрузите Smoothieboard, снова подключитесь с помощью Pronterface. Теперь ось будет двигаться в правильном направлении.
Сделайте это для каждой оси.
Подвижная кровать
Например, если у вас есть подвижная станина по оси Y, а не подвижный инструмент, будьте осторожны: важно направление головки относительно станины, а не направление станины относительно станка. Очень часто можно запутаться и инвертировать ось Y на машинах с подвижной платформой (или не инвертировать ее, когда это должно быть). По сути, если асимметричный объект выглядит как модель при печати, то ваша ось Y правильная, в противном случае вам нужно изменить конфигурацию.
Контроллер шагового двигателя | LabJack
Обзор
- Введение
- Шаговые двигатели
- Сравнение униполярных и биполярных шаговых двигателей
- Основы управления шаговым двигателем
- : подключение шагового двигателя к LabJack серии T
- Оборудование
- Основные соединения
- Идентификация потенциальных клиентов
- : настройка и подключение к LabJack
- Подключение к LabJack
- Настройка LabJack для управления шаговым двигателем
- Псевдокод управления шаговым двигателем
- Пример приложения (только для Windows)
- Подключение и настройка устройства
- Загрузка и запуск последовательности шагов
- Дополнительная литература и исследования
Аппаратное обеспечение
Программное обеспечение
Шаговые двигатели
Шаговые двигатели представляют собой тип бесщеточного электродвигателя постоянного тока, который делит полный оборот на несколько дискретных «шагов» или положений, к которым может перемещаться двигатель. Это позволяет осуществлять позиционное управление двигателем, подавая ему команду на перемещение на определенное количество шагов. Чем больше шагов вращения двигателя, тем больше его разрешение и насколько точно можно управлять его движением. Природа шаговых двигателей позволяет использовать их в системах, где обратная связь от поворотного энкодера невозможна. Если количество шагов за один оборот известно, двигатель можно переместить на любое желаемое расстояние, рассчитав количество оборотов, а затем количество шагов, которым соответствует это расстояние. После выполнения этого количества шагов двигатель должен занять точно правильное положение.
Шаговые двигатели обычно состоят из шестерни, соединенной с валом двигателя и окруженной несколькими электромагнитами. Эти электромагниты разделены на группы, которые называются «фазами». Эти фазы чередуются по кругу вокруг шестерни. Каждый электромагнит в фазе находится под напряжением одновременно и будет тянуть к себе ближайший зубец шестерни. Как только шестерня переключилась, чтобы магнитно выровняться с электромагнитами в текущей фазе под напряжением, она фактически переместилась на один «шаг». Чтобы перейти на следующий шаг, эта фаза отключается и включается следующая фаза в последовательности. Это снова потянет зубья шестерни к следующей фазе и повернет двигатель на один шаг вперед. Поскольку каждая из этих фаз запитывается независимо от других фаз, обычно для каждой фазы требуется свой набор проводов. Программы и схемы контроллера шагового двигателя интерпретируют команду пользователя о том, сколько шагов должен двигаться двигатель, и определяют, когда соответственно активировать каждую фазу.
| Обычно упоминается на электрической схеме шагового двигателя. | Базовая схема вращения шагового двигателя из-за активации одной катушки. |
Униполярный Против. Биполярные шаговые двигатели
Обычно существует два типа шаговых двигателей: униполярные и биполярные.
Самым простым типом шагового двигателя является двухфазный униполярный шаговый двигатель. У них есть только две фазы A и B, которые чередуются вокруг металлической шестерни. Каждая фаза состоит из одной катушки и «центрального ответвления» или «общего провода». Два конца катушки и центральный отвод образуют по три вывода для каждой фазы, всего шесть выводов для двух фаз. Такое расположение позволяет переключать направление магнитного полюса каждой катушки с помощью одного переключателя или двух транзисторов на катушку, чтобы определить, через какой конец катушки будет проходить ток. Это позволяет изменять направление магнитного полюса каждой катушки без необходимости изменения направления тока. Функцию переключения можно облегчить с помощью нашей платы переключения питания PS12DC или нашего драйвера LJTick-Relay, который будет полезен только для униполярных двигателей, поскольку биполярные шаговые двигатели требуют более сложной схемы.
Биполярные шаговые двигатели также имеют по одной катушке на фазу, но не имеют центрального отвода. Отсутствие центрального отвода делает так, что биполярные шаговые катушки могут менять направление своих магнитных полюсов только путем изменения направления тока в катушке. Обычно это делается с помощью одной схемы H-моста на катушку. Включая одновременно два из четырех транзисторов H-моста, пользователь может программно изменить направление тока и, соответственно, магнитный полюс каждой катушки.
Основы управления шаговыми двигателями
Существует множество способов управления шаговыми двигателями, и передовые методики управления продолжают развиваться. Вот некоторые из них:
- Полношаговый привод: Существует два основных типа полношагового привода, как со своими преимуществами, так и с недостатками:
- Одна фаза включена — полный шаг: Также называется режимом Wave Drive , в этом режиме одновременно активируется только одна фаза. Это самый простой режим управления шаговым двигателем, который также требует наименьшего количества энергии.
- Две фазы включены — полношаговый привод: В этом режиме две фазы активируются одновременно с тем же разрешением, что и одна фаза. Однако, поскольку две фазы включены одновременно, этот режим обеспечивает больший крутящий момент за счет большей мощности, чем другие режимы управления.
- Одна фаза включена — полный шаг: Также называется режимом Wave Drive , в этом режиме одновременно активируется только одна фаза. Это самый простой режим управления шаговым двигателем, который также требует наименьшего количества энергии.
- Полушаговый привод: В этом режиме двигатель попеременно включает одну и две фазы одновременно. Это позволяет половине шага иметь вдвое большее разрешение, чем полный шаг. Этот режим также «выравнивает» преимущества и недостатки однофазного включения и двухфазного включения полного шага. Поскольку две фазы включены половину времени, полушаговый режим будет иметь больший крутящий момент, но использовать больше мощности, чем одна фаза на полном шаге, и будет иметь меньший крутящий момент, но потреблять меньше мощности, чем двухфазный на полном шаге.
- Микрошаг: В этом режиме на две фазы двигателя подаются две синусоидальные волны, сдвинутые по фазе на 90° друг относительно друга. Поскольку две синусоидальные волны сдвинуты по фазе на 90°, следующая фаза двигателя будет постепенно становиться более активной с той же скоростью, с которой предыдущая фаза двигателя становится менее активной. Это позволяет делать много маленьких шагов между фазами двигателя. Таким образом, этот режим имеет значительно улучшенное разрешение и, таким образом, обеспечивает гораздо более плавную и тихую работу двигателя, чем другие режимы.
Если требуется более высокая точность или крутящий момент, также существуют расширенные возможности управления, включающие цифровые сигнальные процессоры (DSP). Существуют также системы шаговых двигателей с замкнутым контуром управления, которые используют поворотные энкодеры в качестве механизмов обратной связи, которые обеспечивают более точное управление вращением или алгоритмы «удержания» вращающегося вала. Дополнительные пояснения о том, как управляются шаговые двигатели, можно найти по ссылкам в разделе «Дополнительная литература».
В этом примечании к приложению освещаются возможности устройств LabJack, которые позволяют управлять шаговыми двигателями, используя режимы однофазного полного шага (волновой привод) и полушагового привода посредством запуска сценария Lua. Эти сценарии доступны в разделе «Примеры сценариев Lua» на нашем веб-сайте или в Kipling и называются unipolar_full_step.lua и unipolar_half_step.lua.
Оборудование
Для успешного подключения и эксплуатации шагового двигателя с помощью LabJack вам потребуются следующие материалы:
- Компьютер с USB, Ethernet или WiFi
- LabJack T4 или T7
- PS12DC — плата переключения питания
- Униполярный шаговый двигатель
- PS12DC может выдерживать 750 мА на канал до 28 В, поэтому большинство униполярных шаговых двигателей NEMA17 будут работать. Всегда проверяйте номинальные характеристики двигателя по техническому описанию PS12DC.
- не будут работать, так как для них требуется 2 набора H-мостов, а PS12DC является только переключающим устройством верхнего плеча, поскольку в нем используются полевые МОП-транзисторы с P-каналом.
Биполярные двигатели
- PS12DC может выдерживать 750 мА на канал до 28 В, поэтому большинство униполярных шаговых двигателей NEMA17 будут работать. Всегда проверяйте номинальные характеристики двигателя по техническому описанию PS12DC.
- Источник питания
- Здесь мы будем использовать 12 В постоянного тока, но подойдет все, что не превышает рейтинг PS12DC
- Соединительные провода
Основные соединения
Сначала подключите PS12DC к вашему LabJack, как описано в описании PS12DC. Как обсуждалось выше, средний двухфазный униполярный шаговый двигатель должен иметь в общей сложности шесть выводов с двумя концами катушки и центральным отводом для каждой фазы. Подключите два конца катушки одной из фаз к S0 и S1 на PS12DC и соедините центральный вывод катушки с GND1. Точно так же подключите два конца катушки другой фазы к S2 и S3 и соедините центральный ответвитель второй фазы GND2. Затем подключите VS1 к VS2 и подключите GND1 к GND2. Наконец, подключите VS1 к положительной клемме источника питания 12 В и подключите GND1 к отрицательной клемме источника питания 12 В.
ПРИМЕЧАНИЕ. Любая пара S-каналов, находящихся в одном блоке PS12DC, может использоваться и выполнять одну и ту же операцию. Сценарии LUA по умолчанию unipolar_full_step.lua и unipolar_half_step.lua используют S0+S1 и S4+S5 в качестве каналов ввода-вывода, поэтому перед загрузкой и использованием обязательно обновите сценарий LUA с помощью S-каналов вашего приложения.
Каждый из S-каналов PS12DC соответствует линии цифрового ввода/вывода LabJack. При установке высокого уровня соответствующей линии ввода-вывода данного S-канала 12 В от источника питания будут направляться через этот S-канал. Таким образом, пользователь может программно выбрать момент полного включения каждого конца катушки посредством простого переключения линии ввода/вывода. S0:S7 соответствуют EIO0:EIO7, а S8:S11 соответствуют CIO0:CIO3.
Еще один вариант схемы коммутации силового ключа — наш LJTick-RelayDriver. LJTRD можно подключить к LabJack, а его клеммы INA/INB подключить к любым цифровым линиям ввода-вывода, как показано в техническом описании драйвера LJTick-Relay. Затем питание и заземление источника питания можно подключить к клеммам VR и GNDR LJTRD. Теперь, как и в случае с PS12DC, линии цифрового ввода/вывода можно установить на высокий уровень, чтобы замкнуть полупроводниковый переключатель внутри LJTRD и направить напряжение от источника питания на соответствующий вывод RA/RB. Если концы катушки фазы подключены к этим клеммам RA и RB, LJTRD позволит пользователю решить, когда полностью включить каждую фазу. Также можно использовать любое другое твердотельное реле или транзистор с аналогичными функциями и характеристиками.
Идентификация проводов
Мультиметр можно использовать для определения проводов каждой фазы как конца катушки или центрального отвода. Один из способов сделать это — измерить сопротивление между разными парами проводов. Сопротивление между двумя выводами катушки должно быть в два раза больше, чем сопротивление между выводом катушки и выводом центрального ответвления. Измерив сопротивление между несколькими парами проводов, вы сможете определить, какие из них являются центральными ответвлениями, а какие — концами катушек, и сможете соединить их в приведенной выше конфигурации.
Для управления шаговыми двигателями состояния линий цифровых входов/выходов должны переключаться по определенному шаблону из одного из приведенных выше режимов привода на высоких скоростях. Хотя эти сигналы можно создать, настроив линии ввода-вывода непосредственно с компьютера, более эффективно использовать возможности Lua Scripting LabJack и создать гибридное приложение, в котором некоторая логика находится на хост-компьютере и имеет код управления шаговым двигателем. выполнение непосредственно на устройстве серии T. На следующей функциональной блок-схеме показано, как LabJack можно использовать для управления шаговыми двигателями:
После понимания на высоком уровне того, что необходимо выполнить, можно следовать основному рабочему процессу: подключение к устройству, настройка устройства и управление устройством.
Подключение к LabJack
Первым шагом в большинстве приложений LabJack является открытие подключения к устройству с использованием библиотеки LJM. Это делается с помощью функции LJM_Open, которой можно передать тип устройства, идентификатор, представляющий серийный номер или IP-адрес устройства, и тип подключения для открытия определенного устройства. Функцию открытия также можно вызвать с помощью LJM_Open(LJM_dtANY, LJM_ctANY, LJM_idANY,…), и она откроет любое подключенное устройство. После открытия соединения с устройством функция open вернет дескриптор, который затем можно будет использовать для чтения или записи на устройство LabJack для тела приложения. После завершения тела приложения рекомендуется закрыть соединение с устройством с помощью функции LJM_Close. Дополнительные сведения о подключении к устройству LabJack см. в разделе LJM — открытие и закрытие.
Настройка LabJack для управления шаговым двигателем
Чтобы настроить LabJack в качестве контроллера униполярного шагового двигателя, сначала загрузите и запустите один из сценариев LUA, unipolar_full_step. lua или unipolar_half_step.lua (исходный код можно найти в разделе «Примеры сценариев Lua» наш веб-сайт), на LabJack и сохраните сценарий как сценарий по умолчанию. Руководство по загрузке и сохранению LUA-скрипта в LabJack см. в Учебнике по написанию автономных скриптов на Lua. Скрипты также можно загружать через внешнюю программу, как это видно из приведенного здесь примера Python и примеров LabVIEW, обсуждаемых ниже. Эти сценарии lua объявляют каналы FIO из приведенного выше руководства по подключению, а затем определяют массивы, определяющие порядок, в котором концы катушки должны быть запитаны, чтобы успешно переместить двигатель на желаемое количество шагов в полном или полушаговом режиме. Затем сценарий LUA объявляет следующие регистры USER_RAM, которые могут быть изменены внешними программами для управления двигателем:
- USER_RAM1_I32 (46080): Целевое положение (шаги)
- USER_RAM2_I32 (46082): Текущая позиция (шаги)
- USER_RAM0_U16 (46180): Включить (1 = включить, 0 = отключить)
- USER_RAM1_U16 (46181): eStop (1 = eStop, 0 = работа)
- USER_RAM2_U16 (46182): Удержание положения (1 = блокировка положения двигателя, 0 = разблокировка двигателя после текущего перемещения)
- USER_RAM3_U16 (46183): Установить исходное положение (1 = устанавливает текущую позицию как позицию 0 шага)
После понимания основных сценариев можно разработать расширенные сценарии, реализующие более сложные приложения, такие как:
- При использовании вращательного двигателя положение можно отслеживать по градусам.
- Если шаговый двигатель управляет линейным ползунком, положение можно отслеживать по расстоянию.
- Переместить двигатель на полной скорости в одном направлении.
Псевдокод управления шаговым двигателем
После правильного подключения шагового двигателя и загрузки одного из конфигурационных LUA-скриптов в LabJack внешнее управляющее приложение может считывать и записывать данные из регистров USER_RAM для контроля и управления работой. Псевдокод для базового управления двигателем для перемещения на 200 шагов можно увидеть ниже:
handle = ljm.openS(«ЛЮБОЙ,»ЛЮБОЙ»,»ЛЮБОЙ»)
target_position = 200
ljm.eWriteAddress(handle,46183,0,1) //Сигнал для установки дома
ljm.eWriteAddress(handle, 46182,0,0) // Не держите двигатель для стендовых испытаний, так как он сильно нагревается
ljm.eWriteAddress(handle,46080,2,target_position) //Запишите новую целевую позицию
ljm.eWriteAddress(handle, 46180,0,1) //Включить движение двигателя
//Подождите, пока двигатель достигнет места назначения (включение автоматически отключится в месте назначения)
ожидание = true
при ожидании:
ожидание = ljm. eReadAddress(handle,46180,0) == 1
Устройство серии T после редактирования необходимых линий ввода-вывода, которыми необходимо управлять, и выбора между полношаговым сценарием и полушагом. Приложение доступно в виде файла «.exe» (ссылка на него внизу страницы и здесь) и запустится после загрузки и установки нашей библиотеки LJM для Windows и установки механизма выполнения LabVIEW 7.1. Если требуется межплатформенный пример, у нас также есть пример Python, который можно загрузить и использовать, который опубликован в разделе «Примеры сценариев Lua» на нашем веб-сайте.
Подключение и настройка устройства:
| 1. Настройте параметры устройства (DT, CT, ID): Настройте параметры подключения устройства, чтобы определить, какое устройство будет открыто. | |
| 2. Режим движения и шагов/вращений: Выберите полный или половинный режим, чтобы решить, какой из двух сценариев LUA загружается в устройство, и определить, будет ли двигатель выполнять полные или половинные шаги. Кроме того, установите количество шагов в одном обороте, чтобы программа могла правильно рассчитать угловое положение двигателя. | |
| 3. Connected I/O: Выберите, какие каналы ввода/вывода подключены к шаговому двигателю. Программа LabVIEW выполнит поиск строк кода в файле сценария LUA, которые объявляют каналы ввода-вывода, и заменит их каналами, указанными в этих элементах управления, прежде чем LUA будет загружен в устройство. | |
| 4. Откройте Device & Configure: Подключитесь к устройству и настройте его как контроллер униполярного шагового двигателя. Нажатие этой кнопки заставит программу попытаться подключиться к устройству с заданными параметрами соединения, а затем настроить устройство с заданным режимом движения и линиями ввода-вывода. | |
| Состояние устройства: Убедитесь, что устройство открыто. Если поле состояния устройства горит зеленым цветом и показывает «ОТКРЫТО», устройство было открыто и сконфигурировано как контроллер шагового двигателя. |
Загрузка и запуск последовательности шагов
1. Последовательность загрузки (.csv): Нажмите эту кнопку, и появится приглашение выбрать файл .csv в формате: | |
| Последовательность загружена: Убедитесь, что последовательность загружена. Если поле состояния последовательности светится зеленым цветом и сообщает «Последовательность загружена», значит, файл .csv прочитан и загружен. | |
| 2. Входные данные CSV: После загрузки файла .csv считанные данные появятся в массивах входных данных CSV. Перед выполнением последовательности ходов в массивах можно изменить массивы, щелкнув внутри полей и изменив значения. | |
| 3. Последовательность запуска и остановки: При нажатии кнопки «Последовательность запуска» шаговый двигатель перемещается к каждой позиции в массиве «Позиции» и остается там в течение соответствующего времени в массиве «Длительности». Последовательность остановки остановит двигатель после завершения текущего движения. | |
| 4. Ноль/Сброс: При нажатии этой кнопки двигатель установит свое новое исходное положение (0 шагов) в его текущее положение. |
Примеры LabVIEW Обратите внимание:
Этот пример представляет собой .exe-файл нашего «приложения контроллера шагового двигателя», которое можно загрузить на нашей веб-странице LabVIEW для LJM, и в нем используется шаблон проектирования «производитель-потребитель». Более простой пример «StepperController.vi», а также более исчерпывающий пример «шаговый контроллер-с-чтениями.vi» можно найти в папке:
LabVIEW_LJM/Examples/More/App-Notes/stepper-motor-control
Большинство функций устройств серии T можно использовать с помощью «цикла записи чтения с помощью Config. vi». Предполагая, что один из LUA-скриптов конфигурации уже загружен в LabJack, базовое управление двигателем можно выполнить с помощью этого примера, используя регистры, указанные выше в разделе «Настройка LabJack для управления шаговым двигателем». Этот пример может находиться в папке:
LabVIEW_LJM/Examples/Basics
- Короткую статью с обсуждением различий можно найти в статье, опубликованной Circuit Specialists: «Unipolar Stepper Motor vs Bipolar Stepper Motors».
- Статья Motion Control Tips: шаговый двигатель с разомкнутым контуром и системы шагового двигателя с замкнутым контуром.
- Общее видео, описывающее основы шаговых двигателей: Шаговые двигатели с Arduino — управление биполярными и униполярными шаговыми двигателями
- Видео, в котором хорошо объясняется, как определить, как подключить каждый провод шагового двигателя: Основы шагового двигателя — 6-проводной униполярный/биполярный двигатель. Это объяснение начинается прямо в начале видео.
- Видео с хорошими дополнительными объяснениями волнового режима, полношагового режима, полушагового режима и дополнительных объяснений микрошага: Основы электроники № 24: Шаговые двигатели и их использование
- Хорошее видео, анимирующее вращение и активацию катушек шагового двигателя: Шаговый двигатель — как это работает.
▶️ Как подключить шаговый двигатель к промышленному ПЛК Raspberry Pi▶️ Как подключить шаговый двигатель к промышленному ПЛК Raspberry Pi
Как подключить шаговый двигатель к ПЛК Raspberry
Шаговый двигатель и промышленный ПЛК Raspberry Pi для промышленной автоматизации
5 октября 2021 г.
по
Boot & Work Corp. SL, Фернандес Керальт Мартинес
Введение
Шаговые двигатели — это электродвигатели, очень полезные в области лазеров и оптики. Они часто используются в оборудовании для точного позиционирования, таком как линейные приводы, линейные столики, поворотные столики, гониометры и держатели зеркал.
Другие области применения: упаковочное оборудование и позиционирование пилотных ступеней клапанов для систем управления жидкостью. Или в коммерческих целях шаговые двигатели используются, например, для интеллектуального освещения, объективов камер, станков с ЧПУ или 3D-принтеров.
В этом посте мы узнаем, как подключить шаговый двигатель с микрошаговым драйвером к блоку питания и ПЛК на базе Raspberry Pi.
Последние сообщения об автоматизации Raspberry Pi
Что такое шаговый двигатель
Шаговый двигатель, шаговый двигатель или шаговый двигатель — это бесщеточный электродвигатель постоянного тока , который делит полный оборот на равных шагов.
Можно задать положение двигателя для перемещения и удержания на одном из этих шагов без какого-либо датчика положения для обратной связи (контроллер с разомкнутым контуром), при условии, что размер двигателя соответствует применению в отношении крутящего момента и скорости.
Не путать с серводвигателем , который представляет собой двигатель с обратной связью, подключенный к энкодеру для обеспечения обратной связи по скорости и положению. Двигатель, который движется дискретными шагами, известен как шаговый двигатель .
Что такое микрошаговые драйверы
Микрошаговые драйверы подают питание на соответствующую обмотку шагового двигателя для создания крутящего момента. Они точно распределяют ток между фазами двигателя, таким образом позиционируя шаговый двигатель с меньшим шагом между полными шагами. Они обеспечивают с более высоким разрешением, чем , но с меньшим крутящим моментом. Микрошаг не увеличивает точность шага, но позволяет двигателю работать с меньшим шумом, минимизирует эффекты резонанса на низких скоростях и обеспечивает плавное вращение в широком диапазоне скоростей.
Соединения
Итак, подключаем шаговый двигатель к микрошаговому драйверу, который будет питаться от блока питания. Затем подключите его к промышленному ПЛК Raspberry, как показано ниже.
| Stepper motor | Microstep Driver | Raspberry Pi PLC controller | Power Supply | ||||
| Blue cable | A- | | | ||||
| Красный кабель | А+ | | 7 5489 9089| Black cable | B- | | | |
| Green cable | B+ | | | ||||
| | DIR- | GND | — | ||||
| | DIR+ | RX | |||||
| | PUL- | GND | — | ||||
| | PUL+ | TX | |||||
| VDC | VDC | + | + | + | . 0150 | | — |
А теперь хотите узнать, как заставить работать шаговый двигатель с промышленным ПЛК Raspberry Pi? Ноу-хау >
в Raspberry Pi для промышленности
#
Связь
Мотор
МалинаPLC
Степпер
автоматизация с открытым исходным кодом
Найдите то, что вы ищете
Поиск в нашем блоге
Boot & Work Corp. SL, Fernandez Queralt Martinez
5 октября 2021 г.
Поделиться этой публикацией
Наши блоги
- Ардуино Промышленный
- Промышленные новости Arduino и Raspberry Pi, Индустрия 4.0, Интернет вещей
- Raspberry Pi для промышленности
Архив
— Все даты
Сентябрь
2022
Июнь
2022
февраль
2022
январь
2022
Декабрь
2021
ноябрь
2021
Октябрь
2021
Сентябрь
2021
Август
2021
Июль
2021
Июнь
2021
Май
2021
апреля
2021
Маршировать
2021
февраль
2021
январь
2021
Октябрь
2020
Август
2020
Май
2020
апреля
2020
Август
2019Июль
2019
Май
2019
Маршировать
2019
январь
2019
Декабрь
2018
Читать далее
Учебное пособие по Node-RED: от строки к числу с помощью ПЛК Raspberry Pi
Узнайте, как установить строку msg. payload в число с помощью ПЛК на базе Raspberry Pi
Хотите быть в курсе?
Подпишитесь на наш блог, чтобы быть в курсе последних новостей.
Оставайтесь с нами
Ищете свой идеальный программируемый логический контроллер?
Взгляните на сравнение этого продукта с другими промышленными контроллерами на базе Arduino.
Мы сравниваем входы, выходы, связь и другие функции с соответствующими брендами.
Сравнение промышленных ПЛК >>>
Хотите больше информации?
Просто заполните форму!
Фамилия
Страна
Афганистан
Албания
Алжир
американское Самоа
Андорра
Ангола
Ангилья
Антарктида
Антигуа и Барбуда
Аргентина
Армения
Аруба
Австралия
Австрия
Азербайджан
Багамы
Бахрейн
Бангладеш
Барбадос
Беларусь
Бельгия
Белиз
Бенин
Бермуды
Бутан
Боливия
Бонайре, Синт-Эстатиус и Саба
Босния и Герцеговина
Ботсвана
Остров Буве
Бразилия
Британская территория Индийского океана
Бруней-Даруссалам
Болгария
Буркина-Фасо
Бурунди
Камбоджа
Камерун
Канада
Кабо-Верде
Каймановы острова
Центрально-Африканская Республика
Чад
Чили
Китай
Остров Рождества
Кокосовые (Килинг) острова
Колумбия
Коморы
Конго
Острова Кука
Коста-Рика
Хорватия
Куба
Кюрасао
Кипр
Чешская Республика
Берег Слоновой Кости
Демократическая Республика Конго
Дания
Джибути
Доминика
Доминиканская Респблика
Эквадор
Египет
Эль Сальвадор
Экваториальная Гвинея
Эритрея
Испания
Эстония
Эфиопия
Фолклендские острова
Фарерские острова
Фиджи
Филиппинцы
Финляндия
Франция
Французская Гвиана
Французская Полинезия
Южные Французские Территории
Габон
Гамбия
Грузия
Германия
Гана
Гибралтар
Греция
Гренландия
Гренада
Гваделупа
Гуам
Гватемала
Гернси
Гвинея
Гвинея-Бисау
Гайана
Гаити
Остров Херд и острова Макдональдс
Святой Престол (город-государство Ватикан)
Гондурас
Гонконг
Венгрия
Исландия
Индия
Индонезия
Иран
Ирак
Ирландия
Ислас Маршалл
Остров Мэн
Израиль
Италия
Ямайка
Япония
Джерси
Иордания
Казахстан
Кения
Кирибати
Косово
Кувейт
Кыргызстан
Лаос
Латвия
Ливан
Лесото
Либерия
Ливия
Лихтенштейн
Литва
Люксембург
Макао
Македония, бывшая югославская республика
Мадагаскар
Малави
Малайзия
Мальдивы
Мали
Мальта
Мартиника
Мавритания
Маврикий
Майотта
Микронезия
Молдова
Монако
Монголия
Черногория
Монтсеррат
Марокко
Мозамбик
Мьянма
Мексика
Намибия
Науру
Непал
Нидерланды
Новая Каледония
Новая Зеландия
Никарагуа
Нигер
Нигерия
Ниуэ
Остров Норфолк
Северная Корея
Северные Марианские острова
Норвегия
Оман
Пакистан
Палау
Панама
Папуа — Новая Гвинея
Парагвай
Перу
Острова Питкэрн
Польша
Португалия
Пуэрто-Рико
Катар
Румыния
Российская Федерация
Руанда
Реюньон
Сен-Бартельми
Остров Святой Елены, Вознесение и Тристан-да-Кунья
Сент-Китс и Невис
Сент-Люсия
Сен-Мартен (французская часть)
Сен-Пьер и Микелон
Святой Винсент и Гренадины
Самоа
Сан-Марино
Саудовская Аравия
Сенегал
Сербия
Сейшелы
Сьерра-Леоне
Сингапур
Синт-Мартен (голландская часть)
Словакия
Словения
Соломоновы острова
Сомали
Южная Африка
Южная Георгия и Южные Сандвичевы острова
Южная Корея
южный Судан
Шри-Ланка
Государство Палестина
Судан
Суринам
Шпицберген и Ян-Майен
Свазиленд
Швеция
Швейцария
Сирия
Сан-Томе и Принсипи
Тайвань
Таджикистан
Танзания
Таиланд
Тимор-Лешти
Идти
Токелау
Тонга
Тринидад и Тобаго
Тунис
Турция
Туркменистан
острова Теркс и Кайкос
Тувалу
Малые отдаленные острова США
Уганда
Украина
Объединенные Арабские Эмираты
Соединенное Королевство
Соединенные Штаты
Уругвай
Узбекистан
Вануату
Венесуэла
Вьетнам
Виргинские острова (Британия)
Виргинские острова (США)
Уоллис и Футуна
Западная Сахара
Волшебная страна
Йемен
Замбия
Зимбабве
этип
Аландские острова
Проект для
Мониторинг
Контроль
Автоматизация
Происхождение Из
(*) Я прочитал и принимаю условия политики конфиденциальности
Расскажи мне больше!
Что такое шаговый двигатель и контроллеры? – Omega Engineering
Шаговый двигатель представляет собой бесщеточный синхронный электродвигатель, который преобразует цифровые импульсы в механическое вращение вала. Каждый оборот шагового двигателя делится на дискретное количество шагов, во многих случаях 200 шагов, и для каждого шага двигателю должен посылаться отдельный импульс. Шаговый двигатель может делать только один шаг за раз, и каждый шаг имеет одинаковый размер. Поскольку каждый импульс заставляет двигатель поворачиваться на точный угол, обычно 1,8°, положением двигателя можно управлять без какого-либо механизма обратной связи. По мере увеличения частоты цифровых импульсов шаговое движение превращается в непрерывное вращение со скоростью вращения, прямо пропорциональной частоте импульсов. Шаговые двигатели ежедневно используются как в промышленных, так и в коммерческих целях благодаря их низкой стоимости, высокой надежности, высокому крутящему моменту на низких скоростях и простой прочной конструкции, способной работать практически в любых условиях.
Преимущества шагового двигателя
Преобразование нелинейного входного сигнала в линейный выходной сигнал. Это обычное явление для сигналов термопары.
Угол поворота двигателя пропорционален входному импульсу.
Двигатель имеет полный крутящий момент в состоянии покоя (если обмотки находятся под напряжением).
Точное позиционирование и повторяемость движения, так как хорошие шаговые двигатели имеют точность от 3 до 5% шага, и эта ошибка не накапливается от одного шага к другому.
Отличный отклик на запуск/остановку/реверс.
Очень надежный, так как в двигателе нет контактных щеток. Поэтому срок службы шагового двигателя просто зависит от срока службы подшипника.
Реакция шаговых двигателей на цифровые входные импульсы обеспечивает управление без обратной связи, что делает управление двигателем более простым и менее затратным.
Можно добиться синхронного вращения на очень низкой скорости с нагрузкой, непосредственно соединенной с валом.
Может быть реализован широкий диапазон скоростей вращения, поскольку скорость пропорциональна частоте входных импульсов.
Типы шаговых двигателей
Существует три основных типа шаговых двигателей: с переменным магнитным сопротивлением, с постоянными магнитами и гибридные. Это обсуждение будет сосредоточено на гибридном двигателе, поскольку эти шаговые двигатели сочетают в себе лучшие характеристики двигателей с переменным сопротивлением и двигателей с постоянными магнитами. Они сконструированы с многозубчатыми полюсами статора и ротором с постоянными магнитами. Стандартные гибридные двигатели имеют 200 зубьев ротора и угол поворота 1,8º. Поскольку они демонстрируют высокий статический и динамический крутящий момент и работают с очень высокой частотой шагов, гибридные шаговые двигатели используются в самых разных коммерческих приложениях, включая компьютерные дисководы, принтеры/плоттеры и проигрыватели компакт-дисков. Некоторые промышленные и научные приложения шаговых двигателей включают робототехнику, станки, машины для захвата и размещения, автоматические машины для резки и соединения проводов и даже устройства точного контроля жидкости.
Пошаговые режимы
Шаговые режимы шагового двигателя
включают полный, половинный и микрошаг. Тип выхода шагового режима любого шагового двигателя зависит от конструкции драйвера. OMEGA предлагает приводы с шаговыми двигателями с выбираемыми переключателем полно- и полушаговыми режимами, а также микрошаговые приводы с разрешающей способностью, выбираемой переключателем или программно.
ПОЛНЫЙ ШАГ
Стандартные гибридные шаговые двигатели имеют 200 зубьев ротора или 200 полных шагов на один оборот вала двигателя. Разделение 200 шагов на 360° вращения равно 1,8° полного угла шага. Обычно полношаговый режим достигается за счет подачи питания на обе обмотки с попеременным изменением направления тока. По сути, один цифровой импульс от драйвера эквивалентен одному шагу.
ПОЛУШАГ
Половина шага просто означает, что шаговый двигатель вращается со скоростью 400 шагов за оборот. В этом режиме на одну обмотку подается питание, а затем поочередно подается питание на две обмотки, в результате чего ротор вращается на половине расстояния, или 0,9°. Хотя он обеспечивает примерно на 30% меньший крутящий момент, полушаговый режим обеспечивает более плавное движение, чем полношаговый режим.
MICROSTEP
Микрошаговый шаг — это относительно новая технология шагового двигателя, которая регулирует ток в обмотке двигателя до такой степени, что количество положений между полюсами далее подразделяется. Микрошаговые приводы OMEGA способны разделить полный шаг (1,8°) на 256 микрошагов, что дает 51 200 шагов на оборот (0,007°/шаг). Микрошаг обычно используется в приложениях, требующих точного позиционирования и более плавного движения в широком диапазоне скоростей. Как и полушаговый режим, микрошаг обеспечивает примерно на 30% меньший крутящий момент, чем полношаговый режим.
Управление линейным движением
Вращательное движение шагового двигателя может быть преобразовано в линейное с помощью системы привода с ходовым винтом и червячной передачей. Ход или шаг ходового винта — это линейное расстояние, пройденное за один оборот винта. Если ход равен одному дюйму на оборот, а на один оборот приходится 200 полных шагов, то разрешение системы ходового винта составляет 0,005 дюйма на шаг. Еще более высокое разрешение возможно при использовании системы шагового двигателя/привода в микрошаговом режиме.
Последовательное или параллельное соединение Существует два способа подключения шагового двигателя: последовательно или параллельно. Последовательное соединение обеспечивает высокую индуктивность и, следовательно, больший крутящий момент на низких скоростях. Параллельное соединение снизит индуктивность, что приведет к увеличению крутящего момента на более высоких скоростях.
Обзор технологии драйверов
Драйвер шагового двигателя получает сигналы шага и направления от индексатора или системы управления и преобразует их в электрические сигналы для запуска шагового двигателя. Для каждого шага вала двигателя требуется один импульс. В полношаговом режиме со стандартным 200-шаговым двигателем для совершения одного оборота требуется 200 импульсов шага. Скорость вращения прямо пропорциональна частоте импульсов. Некоторые драйверы имеют встроенный генератор, который позволяет использовать внешний аналоговый сигнал или джойстик для установки скорости двигателя.
Характеристики скорости и крутящего момента шагового двигателя основаны на протекании тока от привода к обмотке двигателя. Фактор, который препятствует потоку или ограничивает время, необходимое току для возбуждения обмотки, известен как индуктивность. Из-за индуктивности большинство типов схем драйверов предназначены для подачи большего напряжения, чем номинальное напряжение двигателя. Чем выше выходное напряжение драйвера, тем выше уровень крутящего момента по отношению к скорости. Как правило, выходное напряжение драйвера (напряжение шины) должно быть в 5-20 раз выше, чем номинальное напряжение двигателя. Чтобы защитить двигатель от повреждения, ток привода шагового двигателя должен быть ограничен номинальным током шагового двигателя.
Обзор индексатора
Индексатор, или контроллер, предоставляет водителю выходные данные шага и направления. Для большинства приложений требуется, чтобы индексатор также управлял другими функциями управления, включая ускорение, замедление, количество шагов в секунду и расстояние. Индексатор также может взаимодействовать со многими другими внешними сигналами и управлять ими.
Связь с индексатором осуществляется через последовательный порт RS-232 и, в некоторых случаях, через порт RS485. В любом случае индексатор способен получать высокоуровневые команды от главного компьютера и генерировать драйверу необходимые импульсы шага и направления.
Индексатор включает вспомогательный ввод/вывод для контроля входов от внешних источников, таких как переключатель «Пуск», «Толчок», «Домой» или концевой выключатель. Он также может инициировать другие функции машины через выходные контакты ввода-вывода.
Автономная работа
В автономном режиме индексатор может работать независимо от главного компьютера. После загрузки в энергонезависимую память программы движения можно запускать с различных типов интерфейсов оператора, таких как клавиатура или сенсорный экран, или с переключателя через вспомогательные входы/выходы. Автономная система управления шаговым двигателем часто комплектуется драйвером и источником питания, а также опциональной обратной связью энкодера для приложений с «замкнутым контуром», требующих обнаружения остановки двигателя и точной компенсации положения двигателя.
Многоосевое управление
В таких случаях доступна многоосевая система управления. К сетевому концентратору HUB 444, например, может быть подключено до четырех шаговых приводов, причем каждый привод подключен к отдельному шаговому двигателю. Сетевой концентратор обеспечивает скоординированное движение для приложений, требующих высокой степени синхронизации, таких как круговая или линейная интерполяция.
Выбор шагового двигателя и привода
Выбор шагового двигателя зависит от требований к крутящему моменту и скорости приложения. Используйте кривую крутящего момента двигателя (находится в технических характеристиках каждого привода), чтобы выбрать двигатель, который будет выполнять эту работу. Каждый шаговый привод линейки OMEGA показывает кривые крутящий момент-скорость для двигателей, рекомендуемых для этого привода. Если ваши требования к крутящему моменту и скорости могут быть удовлетворены с помощью нескольких шаговых двигателей, выберите привод в соответствии с потребностями вашей системы движения — шаг/направление, автономное программирование, аналоговые входы, микрошаговый режим — затем выберите один из рекомендуемых двигателей для этого привода. . Список рекомендуемых двигателей основан на обширных испытаниях, проведенных производителем, чтобы обеспечить оптимальную работу комбинации шагового двигателя и привода.
Выберите правильный шаговый двигатель для вашего приложения
Шаг и направление
Эти приводы шаговых двигателей принимают импульсы шага и сигналы направления/разрешения от контроллера, такого как ПЛК или ПК. Каждый импульс шага заставляет двигатель поворачиваться на точный угол, а частота импульсов определяет скорость вращения. Сигнал направления определяет направление вращения (по часовой стрелке или против часовой стрелки), а сигнал разрешения включает или выключает двигатель.
Генератор
Приводы с шаговым двигателем со встроенным цифровым генератором принимают аналоговый вход или джойстик для управления скоростью. Эти системы обычно используются в приложениях, требующих непрерывного движения, а не управления положением, таких как миксеры, блендеры и диспенсеры.
Автономный программируемый
Все эти шаговые приводы могут быть запрограммированы для автономной работы; программа управления движением создается с помощью простого интерфейса программного обеспечения высокого уровня с функцией перетаскивания (поставляется бесплатно), а затем загружается и выполняется при включении питания. Программа управления движением обычно ожидает ввода, такого как замыкание переключателя или нажатие кнопки, прежде чем выполнять запрограммированное движение.
Высокопроизводительные шаговые двигатели
Эти приводы шаговых двигателей предлагают расширенные функции, такие как самодиагностика, защита от неисправностей, автоматическая настройка, сглаживание пульсаций крутящего момента, сглаживание командных сигналов и антирезонансные алгоритмы. Некоторые приводы программируются автономно, в то время как другие предлагают шаг/направление и аналоговые входы. Высокопроизводительные приводы обеспечат наилучшую возможную производительность вашей системы управления перемещением.
- Преимущества шагового двигателя
- Типы шаговых двигателей
- Пошаговые режимы
- Обзор технологии драйверов
- Обзор индексатора
- Автономная работа
- Многоосевое управление
- Выбор шагового двигателя и привода
- Выберите правильный шаговый двигатель
Посмотреть эту страницу на другом языке или в другом регионе
Проводка шагового двигателя — Make ‘N’ Print
Установили новый шаговый двигатель, материнскую плату или проводку, а двигатель теперь гудит или дрожит? Следование этому руководству может решить проблему.
Это может произойти по нескольким причинам. Например, ремень/ремни на 3D-принтере могут быть слишком ослаблены. Это приводит к потере тяги и имеет тот же эффект, что и проблема с проводкой. Итак, начните с проверки натяжения ремней на вашей машине.
Кроме того, скрежет, рывки или тряска шагового двигателя также могут свидетельствовать о повреждении проводки от материнской платы 3D-принтера к шаговому двигателю. Однако, если вы только что установили новый шаговый двигатель NEMA или новую материнскую плату 3D-принтера, то последовательность проводки от материнской платы к шаговому двигателю, вероятно, будет другой. В обоих случаях шаговый двигатель не получает правильный или полный сигнал. Таким образом, шаговый двигатель останавливается, дрожит, скрежещет, заикается или трясется.
Почему не работает?
Проще говоря, шаговые двигатели NEMA 17 работают с обмотками, соединенными парами, каждая из которых называется фазой. Эти фазы перемещают магниты внутри шагового двигателя. Когда проводка для этих пар не совпадает или если кабель поврежден, шаговый двигатель не может правильно двигаться, так как северный и южный полюса магнитов не могут вращаться.
Почему не Plug N Play?
В частности, с таким количеством производителей в разных странах кажется, что никто не придумал установленный стандарт и не придерживался его. Следовательно, проводка не всех шаговых двигателей NEMA одинакова, и цвета, используемые на кабелях шаговых двигателей, часто ничего не значат.
Кроме того, последовательность проводки от материнской платы 3D-принтера снова вряд ли будет соответствовать шаговым двигателям. Из-за этого шаговый двигатель получает неверный сигнал. Заставляет шаговый двигатель либо дрожать, скрежетать, либо даже двигаться только в одном направлении, при этом также вибрируя.
Реклама
Последовательность проводки шагового двигателя SKR Mini E3 V2
Есть несколько исключений из моих комментариев выше, например, BTT SKR Mini E3 V2 — это специальная материнская плата для замены Creality Ender 3. Таким образом, проводка совпадает с проводкой оригинала. материнская плата.
Последовательность подключения шагового двигателя SKR Octopus
Но BTT SKR Octopus не является прямой заменой Creality Ender 3, и подключение шагового двигателя будет другим.
Как найти правильную проводку шаговых двигателей?
Есть несколько быстрых и простых способов узнать пару катушек шагового двигателя. Во-первых, вы можете использовать мультиметр для проверки непрерывности. В качестве альтернативы вы можете использовать два провода и светодиод или даже два обычных провода.
Тестирование мультиметром
Переведите мультиметр в режим непрерывности, который обычно имеет значок диода или зуммера.
Затем поместите один из щупов на крайний левый штифт. Затем другим щупом проверьте один из двух средних контактов. Когда мультиметр перестает отображать цифру 1 или издает звуковой сигнал, вы обнаружили парное соединение. Теперь прощупайте крайний правый штырек шагового двигателя и проверьте второй средний штырек на наличие второго парного соединения.
Реклама
Проверка светодиодов
Без сомнения, это мой любимый метод, так как он быстрый, простой и не такой громоздкий, как мультиметр. Таким образом, светодиодный подход идеально подходит для работы на 3D-принтерах внутри корпуса. Во-первых, возьмите два провода с гнездовым соединением DuPont на каждом конце, как те, которые используются для электронных макетов. Теперь поместите 3-вольтовый светодиод и вставьте ножки светодиода в разъемы DuPont.
Используйте тот же подход, что и при использовании мультиметра, за исключением того, что вы будете использовать другой конец проводов DuPont вместо пробника. Важно, что светодиод не загорится сам по себе. Поэтому, прежде чем перейти к следующему штифту, медленно поверните рычаг шагового двигателя. Если светодиод загорается, значит, вы нашли одно из парных соединений шаговых двигателей.
Наконец, повторите процесс, чтобы найти другой спаренный разъем, используя крайний правый контакт шагового двигателя и проверив другой средний контакт на наличие второго спаренного соединения.
Тестирование соединенных проводов
Другой метод тестирования соединений шагового двигателя заключается в использовании двух проводов с гнездовым соединением DuPont на одном конце и оголенного провода на другом. Сначала начните с скручивания двух оголенных проводов вместе. Затем поместите одно соединение DuPont в крайнее левое положение, а другое используйте для проверки двух средних контактов. Как и в случае со светодиодом, поверните рычаг шагового двигателя. Если есть увеличение жесткости (Torque), то вы нашли парное соединение.
Что дальше?
На данный момент мы нашли парные соединения на шаговом двигателе. Но теперь нам нужно сопоставить их с материнской платой 3D-принтера.
Объявление
Как найти последовательность разводки платы для шаговых двигателей?
Распиновка парной фазы шагового двигателя на BTT SKR E3 Turbo
Большинство производителей материнских плат для 3D-принтеров указывают распиновку проводки в спецификациях или руководствах к материнским платам. Поэтому первое место для проверки — это онлайн, например, GitHub. Например, Bigtree-Tech, MKS, FLYmaker (Mellow Fly) — это лишь некоторые из них, у которых в репозиториях GitHub есть PDF-файлы с подробным описанием распиновки их материнских плат.
Не забудьте ознакомиться с нашими руководствами по установке, где мы перечисляем последовательность подключения шаговых двигателей для каждой материнской платы.
После того, как вы нашли распиновку, вы должны сопоставить одну пару с контактами 1A и 1B на соединении шагового двигателя на материнской плате. Затем подключите вторую пару к контактам 2A и 2B.
Хорошо, шаговый двигатель работает, но движется в неправильном направлении.
К счастью, это простое решение, требующее, чтобы парные провода поменялись местами. Например, если одна пара (фаза) проводов — Красный и Синий.
Затем переместите провода туда, где были черный и зеленый провода. Но только на одном конце кабеля. Кроме того, я предлагаю заменить контакты на конце проводки шагового двигателя, так как это намного проще и быстрее.
Объявление
Как снять провода с кабеля шагового двигателя?
Сначала сделайте снимок, чтобы напомнить себе исходное расположение контактов, и отсоедините кабель от шагового двигателя. Далее по одному небольшой плоской отверткой поднимите отводы на разъеме. Прежде чем язычок снова закроется, осторожно вытяните провода из разъема.