Содержание
Шаговый двигатель для принтера в категории «Техника и электроника»
Драйвер шагового двигателя TMC2130 1.2А для 3D принтера os
Доставка по Украине
519 грн
399.63 грн
Купить
ShopOnline
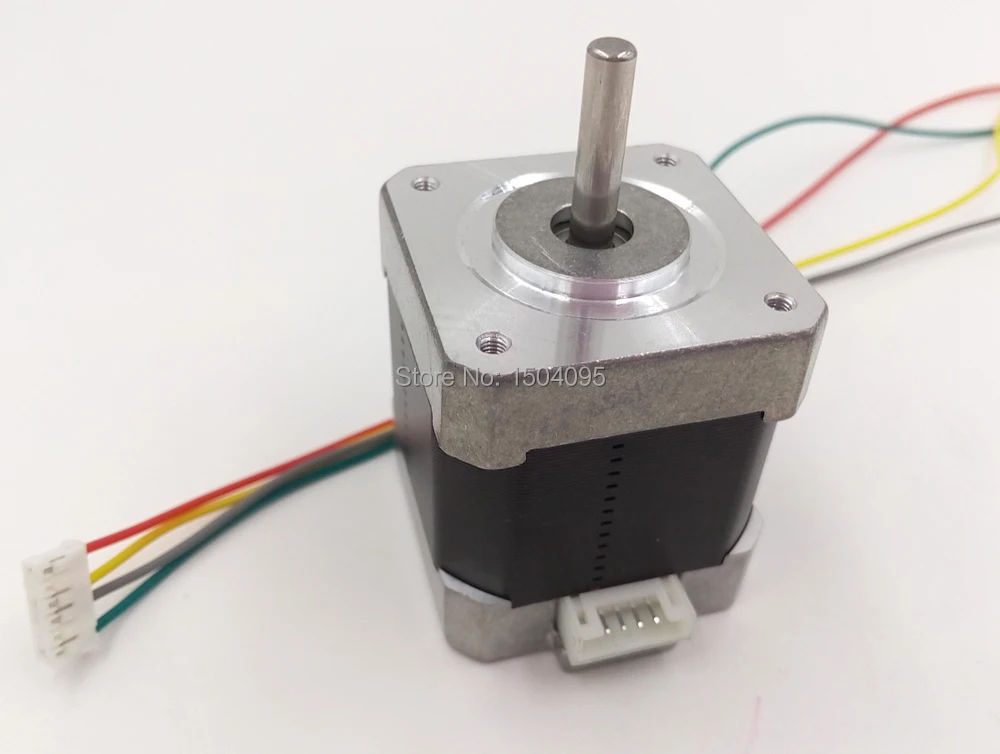
Шаговый двигатель NEMA17 1.7A 17HS4401 для 3D-принтера
Заканчивается
Доставка по Украине
по 370 грн
от 3 продавцов
435 грн
370 грн
Купить
MegaDeals — Оптовый интернет магазин
Шаговый двигатель NEMA17 0.7A 17HS4023 для 3D-принтера
Заканчивается
Доставка по Украине
370 — 520 грн
от 4 продавцов
435 грн
370 грн
Купить
MegaDeals — Оптовый интернет магазин
Драйвер шагового двигателя TMC2130 1.2А для 3D принтера bs
Доставка по Украине
529 грн
407.33 грн
Купить
Bost
Драйвер шагового двигателя TMC2130 1.2А для 3D принтера bl
Доставка по Украине
509.31 грн
392. 17 грн
17 грн
Купить
Bellery
Шаговый двигатель NEMA17 1.7A 17HS4401, 3D-принтер
На складе
Доставка по Украине
355 — 653 грн
от 9 продавцов
563 грн
422 грн
Купить
T2TV.com.ua | Онлайн Гипермаркет
Шаговый двигатель NEMA17 1.7A 17HS4401, 3D-принтер os
Доставка по Украине
610 грн
469.70 грн
Купить
ShopOnline
Шаговый двигатель NEMA17 0.7A 17HS4023, 3D-принтер os
Доставка по Украине
610 грн
469.70 грн
Купить
ShopOnline
Шаговый двигатель NEMA23 2.8A 23HS5628-8.0, 3D-принтер os
Доставка по Украине
1 353 грн
1 041.81 грн
Купить
ShopOnline
Шаговый двигатель NEMA17 1.7A 17HS4401, 3D-принтер bs
Доставка по Украине
620 грн
477.40 грн
Купить
Bost
Шаговый двигатель NEMA17 0.7A 17HS4023, 3D-принтер bs
Доставка по Украине
620 грн
477.40 грн
Купить
Bost
Шаговый двигатель NEMA23 2. 8A 23HS5628-8.0, 3D-принтер bs
8A 23HS5628-8.0, 3D-принтер bs
Доставка по Украине
1 363 грн
1 049.51 грн
Купить
Bost
Шаговый двигатель NEMA17 1.7A 17HS4401, 3D-принтер bl
Доставка по Украине
600.26 грн
462.20 грн
Купить
Bellery
Шаговый двигатель NEMA17 0.7A 17HS4023, 3D-принтер bl
Доставка по Украине
600.26 грн
462.20 грн
Купить
Bellery
Шаговый двигатель NEMA23 2.8A 23HS5628-8.0, 3D-принтер bl
Доставка по Украине
1 343 грн
1 034.11 грн
Купить
Bellery
Смотрите также
Драйвер шагового двигателя TMC2130 1.2А для 3D принтера mo
Доставка по Украине
506.28 грн
389.83 грн
Купить
Mooch
Драйвер шагового двигателя для 3Д принтеров A4988
Доставка из г. Кропивницкий
41 грн
Купить
Montis — комплектующие для систем автоматизации
Шаговый двигатель для ЧПУ 3D-принтера NEMA17 1.7A 17HS4401
На складе в г. Ровно
Доставка по Украине
355 грн
Купить
Double-Shop
Шаговый двигатель NEMA17 0. 7A 17HS4023 для ЧПУ, 3D-принтера
7A 17HS4023 для ЧПУ, 3D-принтера
На складе в г. Ровно
Доставка по Украине
355 грн
Купить
Double-Shop
Шаговый двигатель NEMA23 2.8A 23HS5628-8.0 для ЧПУ, 3D-принтера
На складе в г. Ровно
Доставка по Украине
845 грн
Купить
Double-Shop
Шаговый двигатель NEMA17 1.7A для 3D-принтера, ЧПУ
На складе
Доставка по Украине
562 грн
Купить
Інтернет-магазин MINE — затребувані товари для домашнього побуту і комфорту
Драйвер шагового двигателя TMC2130 1.2А для 3D принтера
На складе
Доставка по Украине
295 грн
Купить
Techland
Шаговый двигатель NEMA17 1.7A 17HS4401, 3D-принтер
На складе в г. Ровно
Доставка по Украине
355 — 394 грн
от 10 продавцов
355 грн
Купить
PROMRV
Драйвер шагового двигателя TMC2130 1. 2А для 3D принтера
2А для 3D принтера
На складе
Доставка по Украине
295 — 565 грн
от 9 продавцов
1 130 грн
565 грн
Купить
GoodStore | Подарки, Товары для дома и работы
Драйвер шагового двигателя TMC2130 1.2А для 3D принтера
На складе
Доставка по Украине
295 грн
Купить
KRONS интернет- магазин
Шаговый двигатель NEMA17 1.7A 17HS4401, 3D-принтер mo
Доставка по Украине
597.23 грн
459.86 грн
Купить
Mooch
Шаговый двигатель NEMA17 0.7A 17HS4023, 3D-принтер mo
Доставка по Украине
597.23 грн
459.86 грн
Купить
Mooch
Шаговый двигатель NEMA23 2.8A 23HS5628-8.0, 3D-принтер mo
Доставка по Украине
1 339.97 грн
1 031.77 грн
Купить
Mooch
Гибкая муфта 5×5мм шагового двигателя 3D-принтера os
Доставка по Украине
148 грн
113.96 грн
Купить
ShopOnline
(Есть решение) Почему бы не использовать высокооборотные шаговые двигатели с высоким микрошагом с редуктором в 3D-принтере?
diy-3d-printer
delta
microstepping
3D-принтер использует шаговые двигатели для перемещения печатающей головки и выдавливания филамента. Они должны обладать хорошим крутящим моментом и разрешающей способностью.
Они должны обладать хорошим крутящим моментом и разрешающей способностью.
Микрошаг улучшает разрешение в 32 раза (я думаю), но чем выше ваш микрошаг, тем меньше крутящий момент.
Так что…
Почему бы не вращать двигатель с микроступенчатой передачей на высоких оборотах (что также уменьшает крутящий момент) и не увеличить крутящий момент за счет тяжелого редуктора с использованием червячной передачи?
Не будет ли движение печатающей головки еще более плавным, а небольшие ошибки в микрошагах и неравномерности передач не будут усреднены с использованием подхода с высокими оборотами и редуктором?
Действительно ли микрошаг действительно обеспечивает точное разделение шагов?
Можем ли мы обойтись более слабыми двигателями, потому что крутящий момент будет увеличен за счет уменьшения передачи?
Можем ли мы обойтись 48 шаговыми шаговыми двигателями вместо 200, потому что уменьшение передачи обеспечивает повышенное разрешение?
Существуют экструдеры, которые используют гибкий вал для поворота червячной передачи в прямом экструдере, в то время как двигатель установлен на раме, которая поворачивает гибкий вал (на ум приходит пикантный шустрый).
 Почему бы им просто не использовать наименьший возможный шаговый двигатель для прямого вращения червячной передачи?
Почему бы им просто не использовать наименьший возможный шаговый двигатель для прямого вращения червячной передачи?
 Почему бы им просто не использовать наименьший возможный шаговый двигатель для прямого вращения червячной передачи?
Почему бы им просто не использовать наименьший возможный шаговый двигатель для прямого вращения червячной передачи?Увеличение частоты вращения двигателя и использование редуктора должны сохранить точность и крутящий момент, позволяя использовать более слабые и легкие двигатели, что потенциально снижает детализацию движения. Я думал, что это более простой подход, и я хотел понять, что я потеряю в качестве компромисса. Я рассматривал большее трение при червячной передаче и износ, более высокий нагрев двигателя и т. Д. Но, может быть, это что-то вроде «не чини то, что не сломано». 3D-принтеры в наши дни не так уж дороги. Я просто хотел бы, чтобы они были еще дешевле.
@Mitesh Patel, 👍2
Обсуждение
3 ответа
Лучший ответ:
▲ 6
Чтобы ответить на каждый вопрос:
- Микрошаг улучшает разрешение в 32 раза (я думаю), но уменьшает крутящий момент, чем выше ваш микрошаг.

Крутящий момент не уменьшается за счет микрошагов. Уменьшение крутящего момента происходит только при движении на высоких оборотах. Сопротивление фазы двигателя должно соответствовать целевому значению оборотов в минуту (или скорости шага). Кроме того, микрошаг может достигать 1/256, и я лично использовал 1/128. Некоторые скажут, что все, что делает более высокий микрошаг,-это улучшает плавность, а не точность. Я лично протестировал 1/128 микрошагов по 17-дюймовой длинной оси. Мне удалось добиться точности и повторяемости с точностью до 5 микрон.
- Почему бы не вращать двигатель с микрошагом на высоких оборотах (что также снижает крутящий момент) и не увеличить крутящий момент за счет сильного редуктора с помощью червячной передачи?
Ответная реакция! Весь смысл шаговых двигателей в том, что они обеспечивают движение без люфта. Установка передачи между электромагнитным и концевым эффектором создаст люфт, который необходимо компенсировать во время движения. Современные системы ЧПУ учитывают это в своих профилях перемещения и включают автоматическую компенсацию люфта (например, Mach4).
Современные системы ЧПУ учитывают это в своих профилях перемещения и включают автоматическую компенсацию люфта (например, Mach4).
- Не будет ли движение печатающей головки еще более плавным, а небольшие ошибки в микрошагах и неравномерности передач не будут усреднены с использованием подхода с высокими оборотами и редуктором?
Он уже достаточно плавный с 1/64 — м или большим микрошагом. Экструзионное сопло опускается только до 2 мм.
- Действительно ли микрошаг действительно обеспечивает точное разделение шагов?
Да. Да, это так.
- Можем ли мы обойтись более слабыми двигателями, потому что крутящий момент будет увеличен за счет уменьшения передачи?
Нет, потому что это просто остановится.
- Можем ли мы обойтись 48 шаговыми шаговыми двигателями вместо 200, потому что уменьшение передачи обеспечивает повышенное разрешение?
Помимо того факта, что никто не делает 48 шагов за оборот двигателей, использование редуктора было бы нелогичным.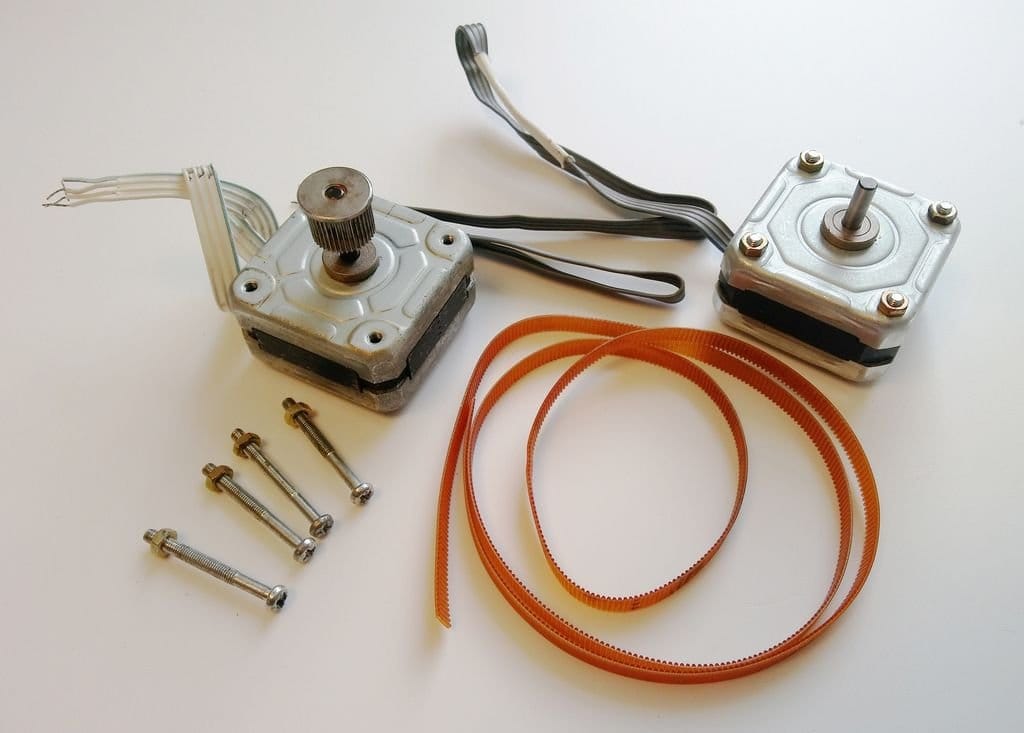 В настоящее время существует 400 двигателей с шагом на оборот, которые фактически повышают точность без каких-либо потерь крутящего момента.
В настоящее время существует 400 двигателей с шагом на оборот, которые фактически повышают точность без каких-либо потерь крутящего момента.
- Существуют экструдеры, которые используют гибкий вал для поворота червячной передачи в прямом экструдере, в то время как двигатель установлен на раме, которая поворачивает гибкий вал (на ум приходит пикантный шустрый). Почему бы им просто не использовать наименьший возможный шаговый двигатель для прямого вращения червячной передачи?
Крутящий момент! Если бы они использовали небольшой двигатель для привода экструдера, им пришлось бы компенсировать потерю крутящего момента более высокой мощностью (т. е. напряжением). Это приведет к проблемам с охлаждением этого двигателя.
Суть в том, что если вы правильно определяете размеры двигателей и проектируете систему, то трансмиссия не нужна. Если вам нужен больший крутящий момент, приобретайте двигатели большего размера. Если портал должен быть легким, используйте механизм delta или corexy.
,
@user77232
▲ 2
Есть старое правило, которое гласит: «Если вопрос начинается с» Почему они этого не делают», ответ, скорее всего, будет «деньги»».
В данном случае речь идет о стоимости червячных передач. Правильно сопрягаемые червячные передачи намного дороже в изготовлении, чем обычные цилиндрические шестерни. Это, вероятно, объясняет большую часть этого-не говоря уже о том, что 200 шаговых двигателей, которые мы видим на большинстве принтеров FDM, являются очень распространенным товаром, и чем больше вы что-то делаете, тем меньше стоит каждый из них.
Кроме того, вы не можете управлять большинством червячных передач с обратной передачей (особенно с высоким передаточным числом). Это не повлияло бы на экструдер (или не повлияло бы? Я видел много чего за ручки ходить на экструдере вала двигателя), но если я не могу вернуться-вожу X или Y оси, я был бы очень раздражен (использования ручного управления движением в прошивку все, как стол откатка) . .. даже ходового винта по оси Z может быть обратно-управляемый без излишних усилий.
.. даже ходового винта по оси Z может быть обратно-управляемый без излишних усилий.
Итак, итог: то, что у нас есть сейчас, работает достаточно хорошо, и сделать его (может быть, совсем немного) лучше будет стоить дороже, чем то, что мы получим. ИМО.
,
@Zeiss Ikon
▲ 2
- Существуют экструдеры, которые используют гибкий вал для поворота червячной передачи в прямом экструдере, в то время как двигатель установлен на раме, которая поворачивает гибкий вал (на ум приходит пикантный шустрый). Почему бы им просто не использовать наименьший возможный шаговый двигатель для прямого вращения червячной передачи?
Flex3Drive, из которого якобы был клонирован Zesty, допускает использование очень маленького двигателя NEMA-8, непосредственно соединенного с червячной передачей вместо гибкого вала. Это по-прежнему добавляет значительное (с точки зрения машин, стремящихся к ускорению 40 м/с2 и тому подобное) количество массы к инструментальной головке, и мне неясно, какая скорость/ускорение по оси E достижима при уменьшении 40:1 и таком маломощном двигателе.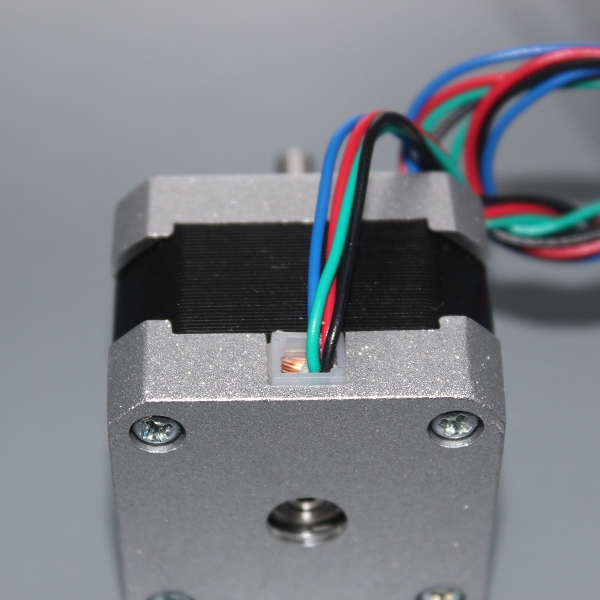
А большего степперы обычно используется в 3D-принтеры вполне способны правдоподобное е-осевой скоростью или ускорением, что вам хотелось бы без передачи или с незначительными потерями (например, 2:1 или 3:1), Как только вы встаете с червячной передачей уровень отношений, это вопрос свойств конкретного мотора, можно ли получить достаточную скорость для приемлемого втягивание производительности или даже нормально печатать движения на очень высоких скоростях. Например, у меня есть Flex3Drive G5, и оригинальный электронный шаговый двигатель NEMA-17 от моего Ender 3 плохо работает с ним без дополнительной передачи со стороны двигателя вала. Однако «шаговый двигатель с высокой частотой вращения», как вы предлагаете, должен прекрасно справляться с червячным редуктором.
Итак, есть ли какая-то причина для этого? Если вы передаете силу таким образом, что не можете справиться с высоким крутящим моментом, например, с гибким валом, да. В противном случае-нет. Как уже говорили другие, современные микрошаги до смешного точны.
,
@R.. GitHub STOP HELPING ICE
Salvage Шаговые двигатели и другие полезные детали от LaserJet Printer
Электроника
Энгр Фахад
Отправить письмо
30 июля 2019 г.
1 889
Описание:
Спасение шаговых двигателей и других полезных деталей от принтера LaserJet . Эта статья о том, как утилизировать полезные электронные компоненты и детали от принтера LaserJet, которые можно использовать в небольших проектах станков с ЧПУ «Сделай сам», запайщиков пластиковых пакетов. и так далее. Шаговые двигатели, извлеченные из принтера, можно использовать во многих проектах. Если вы новичок, это может действительно помочь вам понять 9Шаговый двигатель 0009. Шаговые двигатели, которые я спас, являются биполярными шаговыми двигателями.
Без дальнейших промедлений приступим!!!
Прежде всего, я начал с откручивания винтов.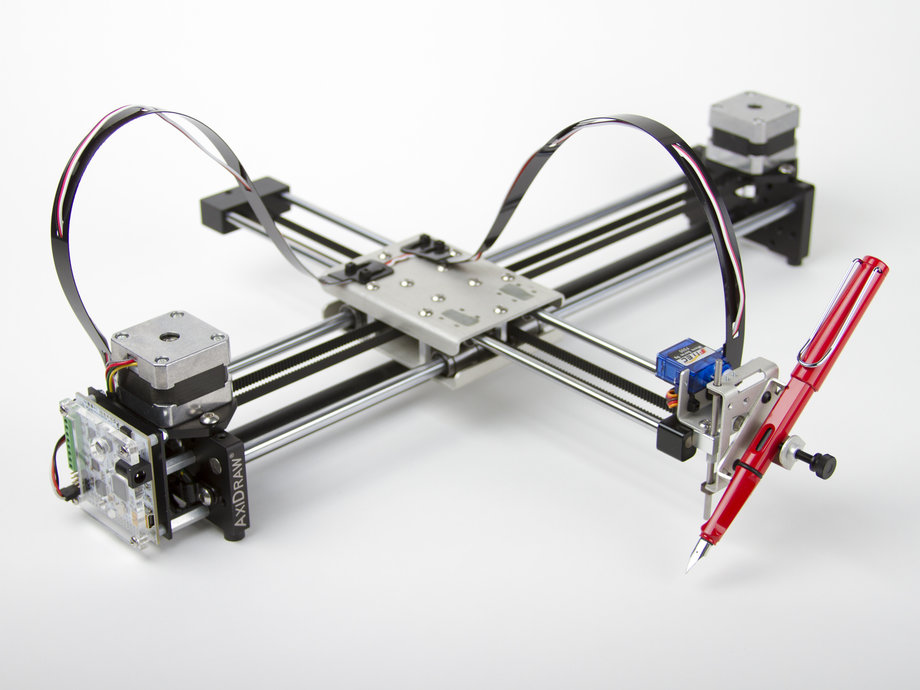
Затем я снял основную металлическую пластину.
Снял пластиковый корпус и, наконец, получил доступ к внутренним электронным компонентам.
На следующем рисунке показана основная печатная плата, которая состоит из множества электронных компонентов, таких как резисторы, конденсаторы, катушки индуктивности, трансформатор, переключатели, вилки и т. д. Я могу получить много электронных компонентов с этой платы, некоторые из которых я могу использовать. мои предстоящие уроки.
Я спас следующие вещи.
Это 4-проводной биполярный шаговый двигатель, который я могу использовать во многих проектах. Но я планирую использовать этот двигатель в небольшом станке с ЧПУ. Через минуту я подключу этот шаговый двигатель к Arduino и практически увижу этот шаговый двигатель в действии.
Это нагревательный элемент переменного тока на 220 В, который можно использовать в проекте по запайке пластиковых пакетов.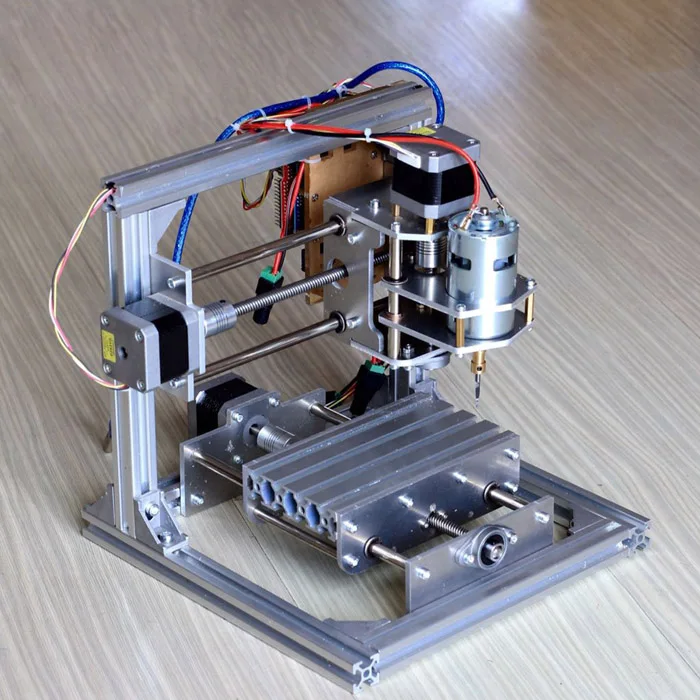 Этот нагревательный элемент также можно использовать в проектах, где нам нужно что-то нагреть. Этот нагревательный элемент можно использовать в тысячах проектов. Этот нагревательный элемент может управляться автоматически с помощью реле 12 В. Я буду использовать этот нагревательный элемент в некоторых из моих будущих уроков.
Этот нагревательный элемент также можно использовать в проектах, где нам нужно что-то нагреть. Этот нагревательный элемент можно использовать в тысячах проектов. Этот нагревательный элемент может управляться автоматически с помощью реле 12 В. Я буду использовать этот нагревательный элемент в некоторых из моих будущих уроков.
Это электромагнитный замок на 12 В постоянного тока, который можно использовать во многих проектах; Я практически проверю это через минуту. Вы также можете посмотреть видео, приведенное в конце.
Соединения шагового двигателя с Arduino точно такие же, как описано в моем предыдущем уроке о положении и управлении шаговыми двигателями BiPolar и UniPolar. Поэтому я настоятельно рекомендую вам посмотреть это руководство, так как я использую те же соединения и ту же программу. Из-за шестерен, используемых с шаговым двигателем, очень сложно остановить этот двигатель голыми руками.
О подключении и программировании шагового двигателя смотрите видеоруководство.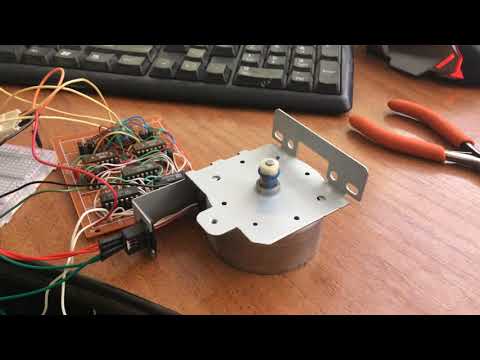
Теперь давайте проверим механизм электромагнитного замка на 12 В.
Соедините один провод с +12 вольт, а другой провод с массой. На самом деле не имеет значения, какой провод вы подключаете к 12 вольтам, а какой провод вы подключаете к земле. в моих следующих уроках я покажу вам, как вы можете управлять этим соленоидным замком, используя Arduino и транзистор 2n2222 NPN. Для ручного управления просто соедините два провода соленоидного замка с 12 В и проводом заземления источника постоянного тока.
Это еще один биполярный шаговый двигатель на 12 В со специально разработанным редуктором, который можно использовать во многих проектах. Поскольку это биполярный шаговый двигатель, можно использовать те же программы и соединения.
Некоторые ролики, которые можно использовать в различных проектах.
Как видите, эти ролики имеют стальные стержни.
Эти стальные стержни могут использоваться в небольших станках с ЧПУ в качестве направляющих стержней. Мне очень нужны были эти стержни для проекта, основанного на автоматическом сверлильном станке. Для более подробной информации смотрите видео-учебник, приведенный ниже.
Мне очень нужны были эти стержни для проекта, основанного на автоматическом сверлильном станке. Для более подробной информации смотрите видео-учебник, приведенный ниже.
Шаговые двигатели для 3D-принтеров
Подкатегории
Показано 1-10 из 10 позиций
Фильтр по
Бренд
Торговая марка
ОЕМ
Цена
Цена
€0,00 — €68,00
Ссылка
I0065
Ссылка
I0020
Ссылка
I0126
Ссылка
I0098
Ссылка
I0117
Ссылка
I0168
Ссылка
I0044
Ссылка
I0116
Ссылка
I0177
Ссылка
I0038
Наверх
Активные фильтры
Вернуться к началу
Зачем использовать шаговые двигатели
Шаговые двигатели имеют множество преимуществ, которые делают их идеальными для использования в 3D-принтерах и станках с ЧПУ. Во-первых, они позволяют контролировать положение — благодаря контроллеру мы можем точно определить положение ротора, в которое мы хотим попасть, и угол, под которым ротор будет находиться в конце цикла. Кроме того, таким же образом мы можем контролировать скорость двигателя (на этот раз благодаря регулятору скорости). Еще одним аспектом шаговых двигателей является способность оставаться фиксированным в одном положении, что позволяет использовать такие приложения, как удержание манипулятора в одном положении или держать дверь открытой. И последнее, но не менее важное: шаговые двигатели очень мощные на низких скоростях. Удельную мощность каждого двигателя смотрите в подробном описании, но у нас есть диапазон от 1,22 кг/см до 28,5 кг/см.
Основные параметры при выборе шагового двигателя
Во-первых, есть два больших типа шаговых двигателей — униполярные и биполярные. По сути, униполяры легче программировать, а биполяры дешевле, однако требуют более сложных драйверов (драйвер должен контролировать не только катушку, на которую он подает питание, но и то, как она должна намагничиваться, поскольку катушки могут менять поляры). Другими ключевыми характеристиками шаговых двигателей являются количество шагов за цикл и угол за шаг (стандартно соответственно 200 и 1,8 градуса). Наконец, есть размеры двигателей, и они определяются единым стандартом NEMA (Национальная ассоциация производителей электрооборудования) — в нашем предложении у нас есть NEMA 17 и NEMA 23, что в значительной степени означает размер передней части двигателя ( 17 — 1,7 дюйма на 1,7 дюйма, 23 — 2,3 дюйма на 2,3 дюйма).
Прочие аксессуары
Для работы всех шаговых двигателей требуется драйвер. Для униполярных драйверов наиболее частым драйвером является ULN2803, очень простой по своим функциям, но удовлетворяющий всем несложным униполярным потребностям. С биполярами ситуация немного сложнее, как и с самим мотором — здесь драйверы могут управлять мощностью, микрошагами и, как правило, те же, что используются в 3D-принтерах. Здесь наиболее популярными будут A4988 или DRV8825. Проверьте нашу категорию драйверов для двигателей, чтобы узнать больше.