Содержание
Регулирование скорости вращения и реверсирование асинхронных электродвигателей
- Подробности
- Категория: Учеба
- электродвигатель
- электроснабжение
- сооружения
- оборудование
- подстанции
- обучение
- приборы
- среднее напряжение
Содержание материала
- Электротехника и электрооборудование
- Счетчики электрической энергии
- Мегомметры
- Измерение неэлектрических
- Асинхронные двигатели
- Пуск асинхронных двигателей
- Регулирование скорости асинхронных
- Данные асинхронных двигателей
- Синхронные машины
- Передвижные электростанции
- Синхронные электродвигатели
- Машины постоянного тока
- Генераторы постоянного тока
- Двигатели постоянного тока
- Электропривод генератор-двигатель
- Трансформаторы
- Конструкция трансформаторов до 10
- Данные трансформаторов до 10
- Специальные трансформаторы
- Измерительные трансформаторы
- Аппаратура управления и защиты
- Аппаратура автоматическая
- Реле защиты и управления
- Логические элементы
- Электропривод на строительстве
- Выбор электродвигателя
- Схемы электроприводы
- Электропривод строительных
- Сварочное электрооборудование
- Электрическое освещение
- Устройство освещения
- Нормы освещенности
- Электрические сети строительные
- Аппаратура подстанций
- Электрические сети
- Устройство электрических сетей
- Выбор сечения проводов
- Безопасность обслуживания
- Защитное заземление
Страница 7 из 39
Регулирование скорости вращения асинхронных двигателей производят несколькими способами. Формула скорости вращения асинхронных двигателей:
Формула скорости вращения асинхронных двигателей:
(7.7) где s — скольжение в долях единицы показывает, что скорость вращения может регулироваться изменением частоты тока f, числа пар полюсов р и скольжения s.
Регулирование скорости вращения изменением величины скольжения асинхронного электродвигателя возможно двумя способами:
- введением в цепь ротора дополнительного сопротивления, что возможно для двигателей с фазным ротором;
- изменением реактивных сопротивлений (дросселей насыщения), включаемых в обмотку статора.
Регулирование скорости асинхронных электродвигателей с фазным ротором введением в его цепь дополнительного сопротивления позволяет уменьшать его скорость практически не более чем на 40—50% номинальной скорости.
При таком регулировании с увеличением сопротивления реостата увеличивается величина скольжения, т. е. уменьшается число оборотов двигателя. В этом случае схема регулирования сходна со схемой пуска асинхронного электродвигателя с фазным ротором (см.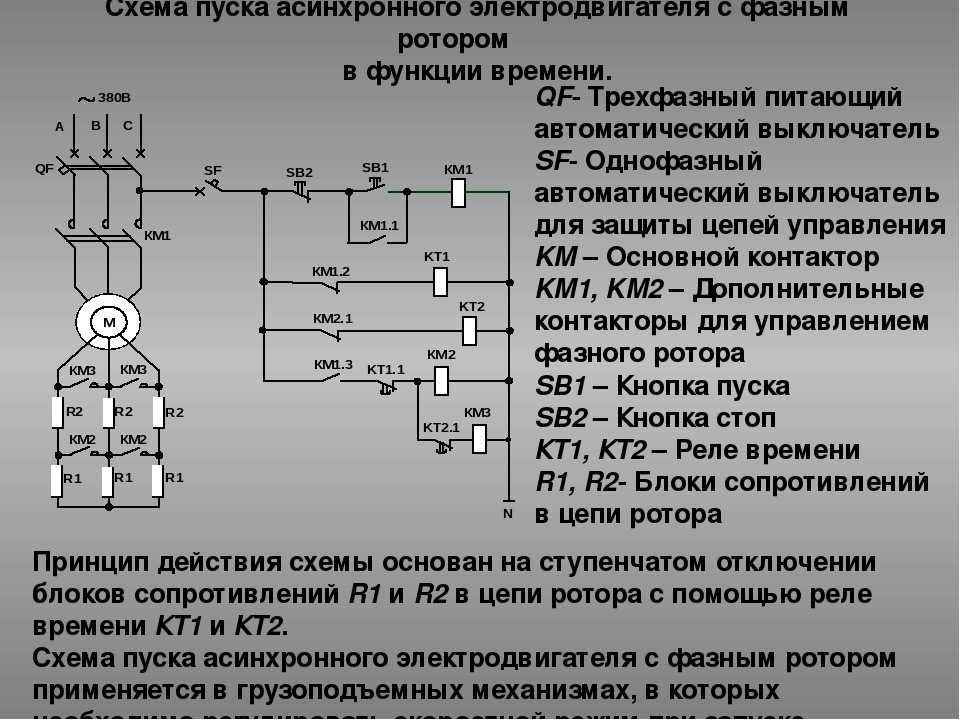 рис.7.8) с той разницей, что регулировочный реостат должен быть рассчитай на длительную нагрузку током. Регулирование скорости с помощью добавочного сопротивления в цепи ротора приводит к неустойчивой работе электродвигателя на малых оборотах, так как при этом приходится включать большие сопротивления, что приводит к значительным колебаниям скорости при небольших изменениях момента сопротивления нагрузки. Кроме того, этот способ мало экономичен, так как увеличивает потери в роторной цепи.
рис.7.8) с той разницей, что регулировочный реостат должен быть рассчитай на длительную нагрузку током. Регулирование скорости с помощью добавочного сопротивления в цепи ротора приводит к неустойчивой работе электродвигателя на малых оборотах, так как при этом приходится включать большие сопротивления, что приводит к значительным колебаниям скорости при небольших изменениях момента сопротивления нагрузки. Кроме того, этот способ мало экономичен, так как увеличивает потери в роторной цепи.
Описанный способ регулирования асинхронных электродвигателей с фазным ротором применяется в тех случаях, когда работа электродвигателя с пониженной скоростью непродолжительна и когда не требуется большой точности регулирования, например для регулирования скорости движения механизмов подъемно-транспортных установок.
Регулирование скорости асинхронных электродвигателей при помощи дросселей насыщения состоит в том, что в цепь статора электродвигателя включаются реактивные сопротивления с переменной индуктивностью. Изменение индуктивности реактивных сопротивлений (дросселей) осуществляется пропусканием постоянного тока различной величины через обмотку управления дросселями (рис. 7.13, а).
Изменение индуктивности реактивных сопротивлений (дросселей) осуществляется пропусканием постоянного тока различной величины через обмотку управления дросселями (рис. 7.13, а).
Изменяемое индуктивное сопротивление в цепи статора электродвигателя позволяет получать на зажимах машины различное напряжение (рис. 7.13, б), чем достигается изменение скольжения, т. е. скорости вращения ротора. Достоинством описанного способа является плавное регулирование скорости вращения электродвигателя; недостатками — значительное уменьшение максимального вращающего момента, а также уменьшение коэффициента мощности и к. п. д. электродвигателя.
Регулирование скорости вращения асинхронного электродвигателя за счет изменения числа пар полюсов осуществляется переключением обмотки статора и является ступенчатым. Для этих целей применяют специальные асинхронные многоскоростные электродвигатели, выпускаемые промышленностью и рассчитанные на 2, 3 и 4 скорости. Так, например, четырех скорости ой электродвигатель может иметь синхронные скорости вращения 500, 750, 1000 и 1500 об/мин.
Рис. 7.13. Схема включения и регулирования скорости асинхронных двигателей с короткозамкнутым ротором при помощи дросселей насыщения:
а — схема включения; б — механические характеристики
Рис. 7.14. Переключение проводов для изменения направления вращения асинхронного двигателя
Изменение числа пар полюсов достигают наиболее простым способом при устройстве двух независимых обмоток на статоре асинхронного электродвигателя. Такие электродвигатели выпускают с синхронными скоростями вращения 1000/1500 об/мин.
Двухскоростные электродвигатели имеют шесть, трехскоростные— девять и четырехскоростные — двенадцать выводов к переключателю полюсов.
Регулирование скорости вращения асинхронного электродвигателя изменением частоты тока требует применения специального источника переменного тока с изменяемой частотой. Этот способ еще не нашел применения для регулирования скорости электроприводов строительных машин, но является весьма перспективным при использовании для статических преобразователей частоты управляемых, полупроводниковых вентилей-тиристоров, производство которых в настоящее время развивается (о тиристорах см. гл. 10).
гл. 10).
Изменение направления вращения асинхронного двигателя — реверсирование достигается изменением направления вращения магнитного
поля. Для этого достаточно переключить любые два провода трехфазной системы, подводящие ток к статору двигателя. На рис. 7.14 приведена схема такого переключения. При переключении трех проводов направление вращения магнитного поля статора, а следовательно, и ротора двигателя не изменится.
§ 7.9. Потери энергии и коэффициент полезного действия асинхронных электродвигателей. Коэффициент мощности двигателей
Электрическая энергия, расходуемая при работе асинхронного электродвигателя, затрачивается на полезную механическую работу и на покрытие потерь: электрических, магнитных и механических.
Потери в меди или электрические потери обусловлены нагреванием обмоток статора и ротора при протекании по ним тока. Потери в стали (магнитные потери) состоят из потерь на вихревые токи и на перемагничивание в стальных частях статора и ротора. Потери на вихревые токи пропорциональны квадрату частоты тока, а на перемагничивание — первой степени частоты тока. Магнитные потери главным образом происходят в статоре. Потери в стали ротора ничтожно малы вследствие малой частоты его тока и поэтому ими можно пренебрегать.
Потери на вихревые токи пропорциональны квадрату частоты тока, а на перемагничивание — первой степени частоты тока. Магнитные потери главным образом происходят в статоре. Потери в стали ротора ничтожно малы вследствие малой частоты его тока и поэтому ими можно пренебрегать.
Механические потери состоят из расхода энергии на трение в подшипниках, трение ротора о воздух и воздуха в вентиляционной системе электродвигателя. Эти потери зависят от скорости вращения ротора, его диаметра, типа подшипников и конструкции вентиляционной системы двигателя.
Коэффициентом полезного действия (к. п. д.) двигателя называют отношение полезной механической мощности Р3 на валу двигателя к затраченной мощности, потребляемой из сети P1
(7-8)
Так как разница между затраченной и полезной мощностью равна потерям, то формулу получения к. п. д. двигателя можно записать в следующем виде:
(7.9)
где рм — потери в меди или электрические потери; рс — потери в стали или магнитные потери;
Рмех — механические потери.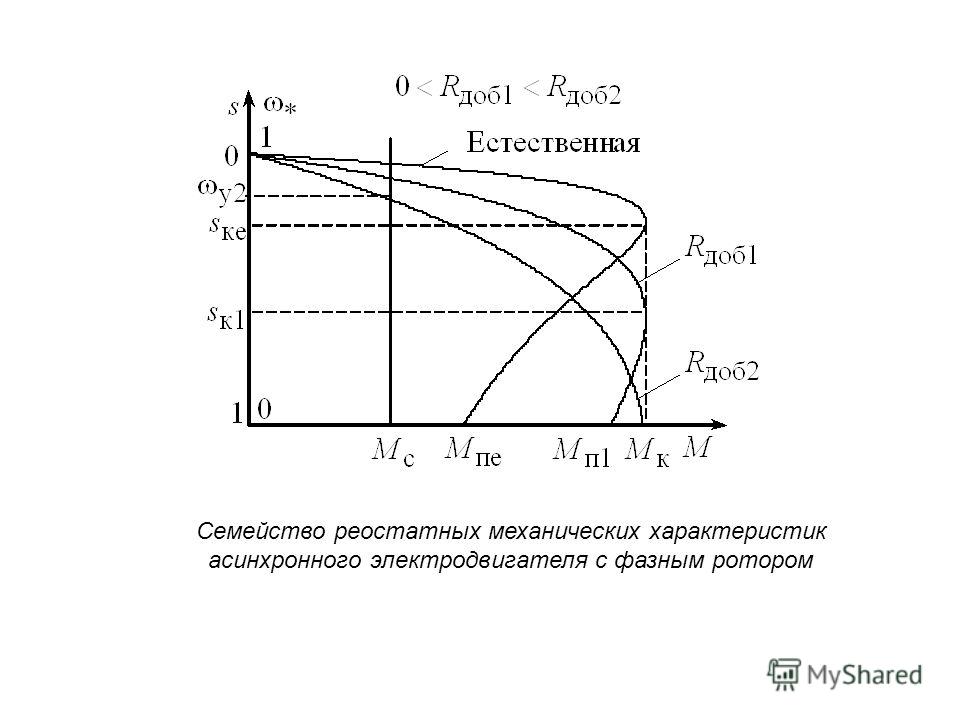
Потери в меди являются переменными, зависящими от нагрузки, вследствие того что с увеличением тока увеличивается назревание обмоток.
Потери в стали (магнитные) и механические потери являются постоянными, так как не зависят от нагрузки.
Коэффициент полезного действия двигателя изменяется в зависимости от нагрузки.
Наибольшей величины к. п. д. достигает при нагрузке, равной примерно 0,75 номинальной, а затем с увеличением нагрузки к. п. д. уменьшается вследствие увеличения электрических потерь на нагревание обмоток (рис. 7.15, а).
Большое магнитное сопротивление воздушного зазора между статором и ротором асинхронного двигателя приводит к значительной величине намагничивающего (реактивного) тока, составляющего примерно 0,4—0,7 от номинальной силы тока электродвигателя. В связи с этим двигатель всегда работает с cos φ, меньшим единицы. При полной нагрузке коэффициент мощности cos φ двигателей достигает максимальной величины 0,8—0,9 (рис. 7.15, б).
Рис.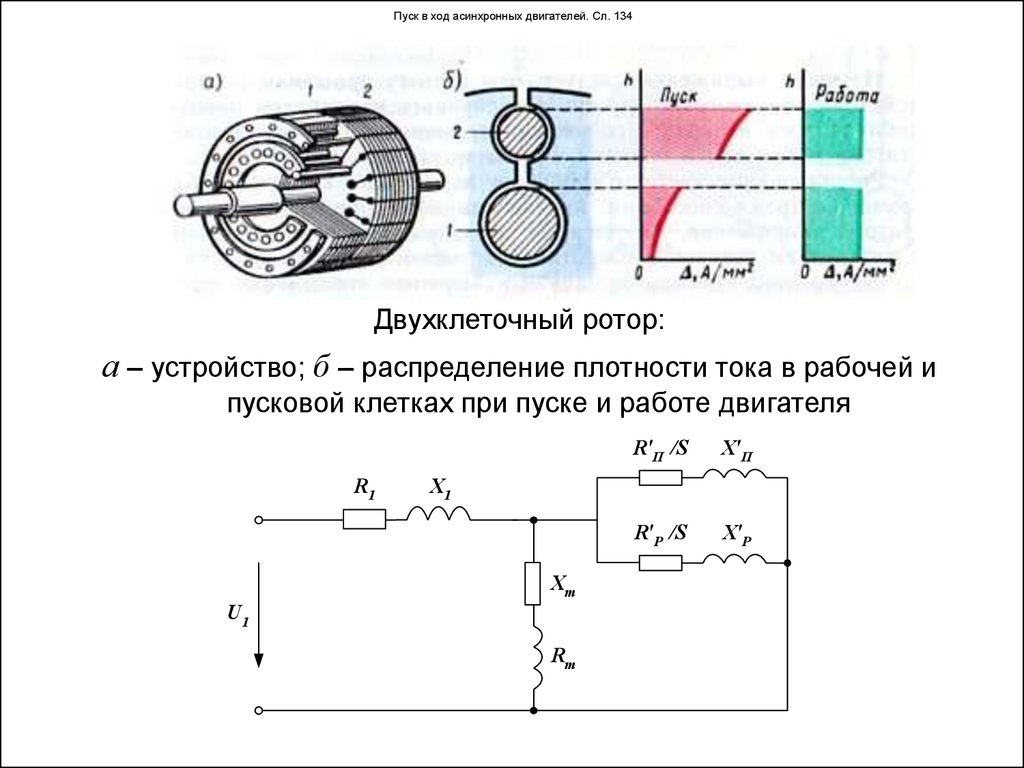 7.15. Зависимость коэффициента мощности асинхронного двигателя от его нагрузки
7.15. Зависимость коэффициента мощности асинхронного двигателя от его нагрузки
С уменьшением нагрузки коэффициент мощности снижается, что объясняется малой зависимостью от нагрузки намагничивающего (реактивного) тока. Сила тока двигателя складывается из двух величин: активного тока, зависящего от нагрузки, и реактивного тока, независимого от нагрузки. Поэтому при механической недогрузке активный ток уменьшается и, следовательно, увеличивается относительная величина реактивного тока, что приводит к снижению коэффициента мощности cos φ.
- Назад
- Вперёд
- Назад
- Вы здесь:
- Главная
- Книги
- Учеба
 org/ListItem»> Электрические сети и системы
org/ListItem»> Электрические сети и системыЕще по теме:
- В помощь сельскому электромонтеру
- Электроснабжение в строительстве
- Электромонтер строительной площадки
- Электрооборудование и автоматизация сельскохозяйственных агрегатов
- Электрические аппараты и оборудование выше 1000В
Регулирование скорости вращения и реверсирование асинхронных электродвигателей
Регулирование скорости вращения и реверсирование асинхронных электродвигателей
Из этого уравнения следует, что скорость вращения можно регулировать путем:
а) изменения скольжения s;
б) изменения числа пар полюсов статорной обмотки р;
в) изменения частоты тока питающей сети f.
Регулирование скорости путем изменения скольжения.
Наиболее простым и распространенным способом регулирования скорости двигателей с контакными кольцами является введение в цепь ротора дополнительного сопротивления. В результате этого изменяется величина скольжения и, следовательно .изменяется и скорость. Величина максимального момента ММакс остается постоянной, а величина соответствующего ему скольжения и наклон характеристики меняются. Таким образом, скорость можно регулировать только вниз от номинальной скорости с диапазоном (2—3) : 1. Плавность регулирования скорости зависит от числа ступеней включаемого сопротивления. Регулировочные сопротивления должны быть рассчитаны на длительную нагрузку током.
В результате этого изменяется величина скольжения и, следовательно .изменяется и скорость. Величина максимального момента ММакс остается постоянной, а величина соответствующего ему скольжения и наклон характеристики меняются. Таким образом, скорость можно регулировать только вниз от номинальной скорости с диапазоном (2—3) : 1. Плавность регулирования скорости зависит от числа ступеней включаемого сопротивления. Регулировочные сопротивления должны быть рассчитаны на длительную нагрузку током.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Регулируя скорость таким образом, следует иметь в виду, что при мощности, уменьшающейся пропорционально скорости вращения, работа допускается в течение коротких отрезков времени (не свыше 0,5 ч) с интервалами, превышающими длительность рабочего периода в 3—4 раза. Длительная работа двигателя на пониженной скорости допустима только при соответствующем снижении момента вращения.
Регулирование скорости с помощью добавочного сопротивления в цепи ротора имеет недостатки: при нем неизбежны значительные потери энергии и снижение жесткости механической характеристики. Кроме того, оно приводит к неустойчивой работе электродвигателя на малых оборотах; в этом случае приходится включать большие сопротивления, что увеличивает крутизну характеристик и влечет за собой колебания скорости вращения при небольших изменениях момента сопротивления нагрузки. Вместе с тем данный способ регулирования скорости находит сравнительно широкое применение для электропривода механизмов с повторно-кратковременным режимом работы, как, например, в крановых установках, а также в приводах с вентиляторным моментом.
Искусственные механические характеристики при различных сопротивлениях в цепи ротора были приведены на рис. 25.
Регулирование скорости вращения двигателя изменением числа пар полюсов. Переключая обмотки статора на различные соединения, дающие разное число пар полюсов, можно изменять ступенями скорость вращения двигателя. Такое регулирование скорости экономично и дает механические характеристики, обладающие большой жесткостью, вследствие чего двигатели с изменением числа полюсов — многоскоростные — находят широкое применение в приводных, не требующих плавного регулирования скорости. Переключение числа пар полюсов достигается изменением схемы соединений статорной обмотки. Чтобы не производить переключений в роторной обмотке, двигатели с переключением полюсов выполняются с короткозамкнутым ротором. Промышленность выпускает двух-, трех- и четырехскоростные двигатели с короткозамкнутым ротором.
Такое регулирование скорости экономично и дает механические характеристики, обладающие большой жесткостью, вследствие чего двигатели с изменением числа полюсов — многоскоростные — находят широкое применение в приводных, не требующих плавного регулирования скорости. Переключение числа пар полюсов достигается изменением схемы соединений статорной обмотки. Чтобы не производить переключений в роторной обмотке, двигатели с переключением полюсов выполняются с короткозамкнутым ротором. Промышленность выпускает двух-, трех- и четырехскоростные двигатели с короткозамкнутым ротором.
При выборе многоскоростного двигателя следует обращать внимание на характер изменения номинального момента и номинальной мощности при переходе от одной скорости к другой.
Для четырехскоростных двигателей можно получать следующие синхронные скорости вращения в об/мин: 3000/1500/1000/500; 3000/1500/750/375; 1500/1000/750/500; 1000/750/500/375. Диапазон регулирования скорости достигает (6: 1) — (8: 1). На рис. 29 приведены механические характеристики двухскоростных асинхронных двигателей. При переходе с высшей скорости вращения на низшую двигатель переходит в генераторный режим с отдачей энергии в сеть.
29 приведены механические характеристики двухскоростных асинхронных двигателей. При переходе с высшей скорости вращения на низшую двигатель переходит в генераторный режим с отдачей энергии в сеть.
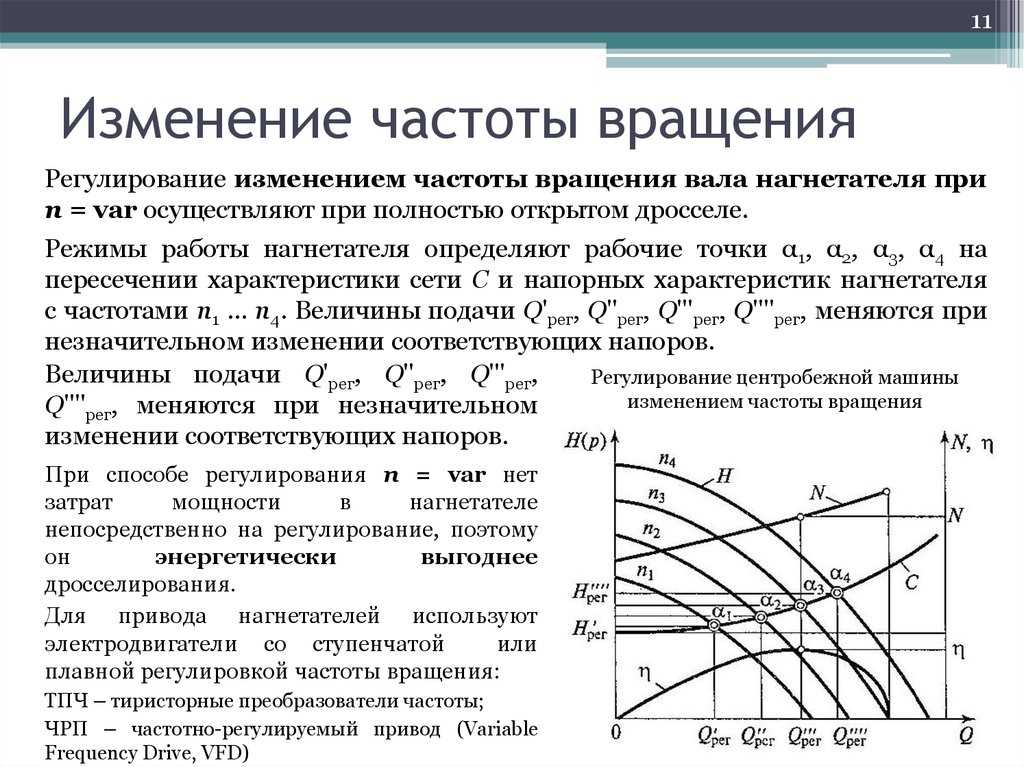
Регулирование скорости изменением частоты питающего тока. Регулирование скорости двигателя путем изменения частоты питающего тока позволяет иметь плавное регулирование в широком диапазоне (10: 1). Механические характеристики двигателя при этом достаточно жесткие и обеспечивают стабильную работу привода. В случае поддержания магнитного потока двигателя неизменным регулирование его скорости производится при постоянном моменте. Для этого необходимо при изменении частоты в том же направлении и в той же кратности изменять и величину напряжения, т. е. обеспечивать постоянство отношения —.
Рассматриваемый способ регулирования скорости может быть применен для одного или нескольких асинхронных двигателей, работающих в одном и том же режиме.
Рис. 29. Механические характеристики двухскоростных асинхронных двигателей трехфазного тока а — при постоянном моменте и различных номинальных мощностях при высшей и низшей скоростях; б — постоянная номинальная мощность, но различные номинальные
Ток различной частоты получается при помощи независимого источника энергии, частота которого может быть регулируемой. К таким источникам относятся преобразователи частоты электромашинные, электронно-ионные и полупроводниковые.
К таким источникам относятся преобразователи частоты электромашинные, электронно-ионные и полупроводниковые.
Несмотря на высокие начальные затраты на оборудование и сложную схему, частотный принцип регулирования скорости применяется в некоторых случаях в промышленности, главным образом для одновременного регулирования скорости вращения группы асинхронных двигателей одного производственного механизма. В электроприводах строительных машин этот способ регулирования скорости пока еще не нашел применения.
Регулирование скорости при помощи дросселей насыщения. Основным элементом управления при этом способе регулирования является дроссель насыщения (рис.30). На сердечнике дросселя имеется обмотка постоянного тока, включаемая в цепь управления. Вторая обмотка переменного тока находится в силовой цепи, подающей питание к обмотке статора двигателя. При изменении величины постоянного тока в обмотке управления дросселя изменяется индуктивное сопротивление его основной обмотки переменного тока, включенной в цепь статора.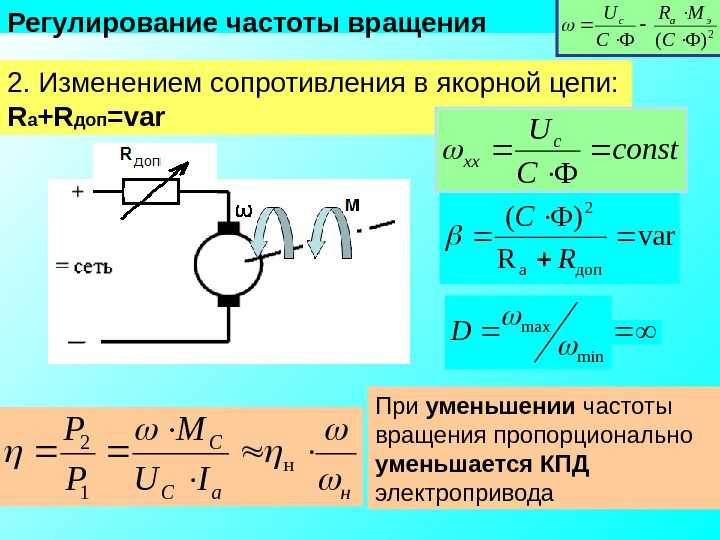 Вследствие этого изменяется напряжение, подводимое к статору двигателя. Мощность, потребляемая в цепи управления постоянного тока, незначительна, порядка одного или нескольких процентов от мощности силовой цепи.
Вследствие этого изменяется напряжение, подводимое к статору двигателя. Мощность, потребляемая в цепи управления постоянного тока, незначительна, порядка одного или нескольких процентов от мощности силовой цепи.
Рис. 30. Схема асинхронного двигателя
а — с дросселями насыщения в цепи статора; б — механические характеристики двигателя без добавочного сопротивления; в — то же, с добавочным сопротивлением в цепи ротора двигателя
Большие преимущества дроссельное регулирование имеет при управлении кранами. Они заключаются в том, что эта система управления обеспечивает: широкий диапазон регулирования скорости, плавность изменения скорости при спуске груза и торможении, достаточную независимость регулирования скорости от нагрузки, контроль за величиной ускорения. Кроме того, она ограничивает величину поднимаемого груза и позволяет управление мощным силовым приводом выполнять путем изменения небольшого по величине тока в цепи намагничивания дросселя. Дроссельное управление целесообразно применять для строительных и других видов кранов с большой высотой подъема в тех случаях, когда наряду с высокой скоростью, необходимой для обеспечения достаточной производительности, требуются малые посадочные скорости, а толчки и раскачивание грузов недопустимы.
Асинхронный электропривод с дросселями насыщения находит также применение для механизмов, работающих в тяжелых условиях (при наличии агрессивной или взрывоопасной среды), поскольку в таком приводе можно создать схемы бесконтактного управления им.
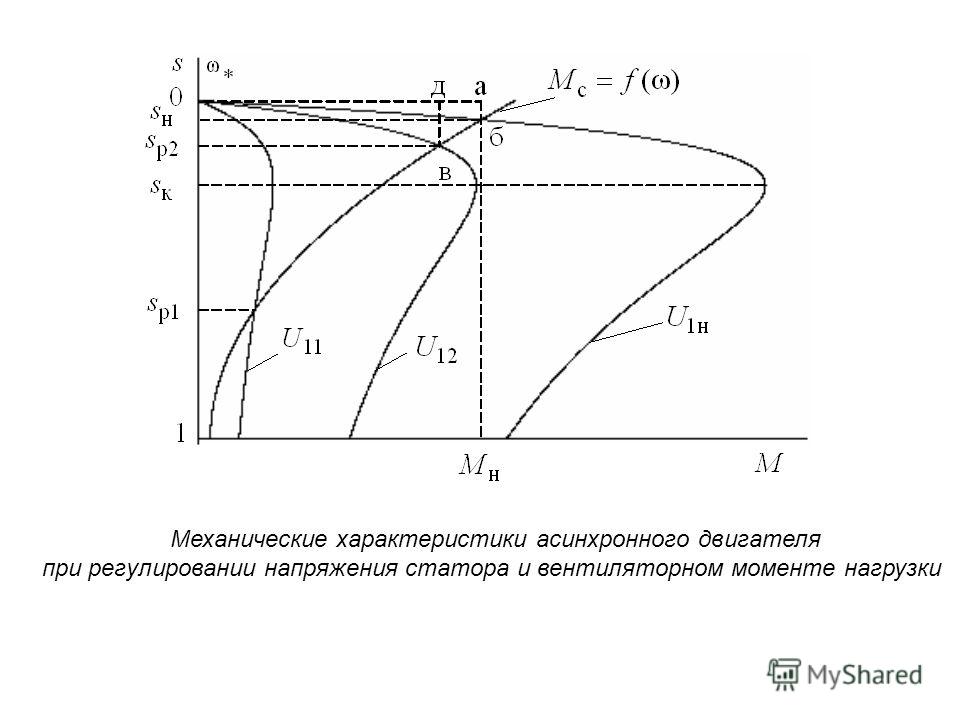
Наиболее благоприятным видом нагрузки для рассматриваемого метода регулирования является вентиляторная нагрузка (центробежные насосы и вентиляторы), так как в этом случае при снижении скорости, а следовательно, и возрастании скольжения уменьшается величина момента, благодаря чему потери в цепи ротора при расширении диапазона регулирования не увеличиваются.
Недостатком дроссельного регулирования является значительное уменьшение максимального вращающего момента двигателя при снижении напряжения в цепи статора, так как у асинхронных двигателей момент пропорционален квадрату напряжения. Кроме того, включение дросселя насыщения, обладающего большой индуктивностью, приводит к снижению коэффициента мощности установки.
Регулирование скорости вращения при помощи электромагнитной муфты скольжения. Этот метод регулирования скорости предусматривает установку между валом приводного двигателя и валом производственного механизма электромагнитной муфты скольжения. Обе части муфты вращаются, причем ведущая часть соединена с приводным двигателем, работающим практически с неизменной скоростью (рис. 31). Ведомая часть муфты соединяется с производственным механизмом, скорость которого должна регулироваться; эта часть муфты не имеет механической связи с ведущей.
Этот метод регулирования скорости предусматривает установку между валом приводного двигателя и валом производственного механизма электромагнитной муфты скольжения. Обе части муфты вращаются, причем ведущая часть соединена с приводным двигателем, работающим практически с неизменной скоростью (рис. 31). Ведомая часть муфты соединяется с производственным механизмом, скорость которого должна регулироваться; эта часть муфты не имеет механической связи с ведущей.
При вращении ведущей части муфты магнитное поле индуктора пересекает якорь и наводит в нем токи, взаимодействие которых с магнитным полем индуктора создает вращающий момент. Таким образом, за счет магнитной связи ведущая часть муфты увлекает за собой ведомую. С целью повышения жесткости характеристик и увеличения диапазона регулирования скорости обычно вводят обратные связи по скорости с помощью центро-)ежного регулятора или тахогенератора. Рассматриваемый метод регулирования скорости обеспечивает плавное и в широком диапазоне (примерно 8 : 1) регулирование. Общий к. п. д. привода определяется произведением к. п. д. муфты и к. п. д. приводного двигателя. Потери в самой муфте определяются в основном потерями скольжения, выделяющимися в якоре муфты. Если принять за 100% мощность, потребляемую производственным механизмом, то установленная мощность электропривода с электромагнитной муфтой должна составлять 200%. В последние годы рассматриваемый способ регулирования скорости начинает широко применяться.
Общий к. п. д. привода определяется произведением к. п. д. муфты и к. п. д. приводного двигателя. Потери в самой муфте определяются в основном потерями скольжения, выделяющимися в якоре муфты. Если принять за 100% мощность, потребляемую производственным механизмом, то установленная мощность электропривода с электромагнитной муфтой должна составлять 200%. В последние годы рассматриваемый способ регулирования скорости начинает широко применяться.
Рис. 31. Электромагнитная муфта скольжения
1 — ротор, связанный с валом электродвигателя; 2 — якорь; 3 — зубцы с обмоткой; 4 — контактные кольца; 5 — щетки; 6 — ведомый вал механизма
Получение устойчивых низких скоростей асинхронного привода. В подъемных и других установках иногда необходимо осуществлять достаточно плавную остановку. С этой целью важно перед полной остановкой производить торможение с малой скоростью.
Получение пониженной скорости возможно при совместной работе двух связанных асинхронных двигателей, один из которых работает в двигательном режиме, другой— в режиме противовключения.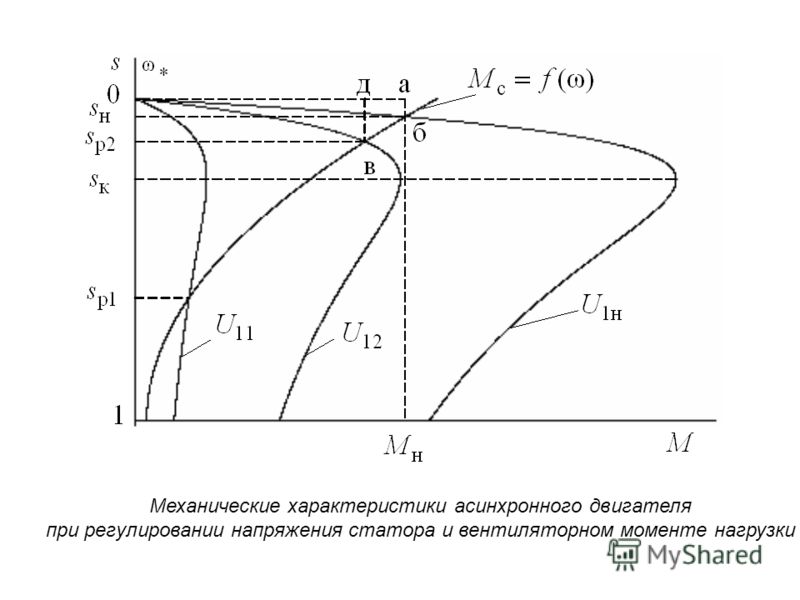 Электрическая часть и механические характеристики привода приведены на рис. 32.
Электрическая часть и механические характеристики привода приведены на рис. 32.
Более жесткую механическую характеристику при пониженной скорости можно получить в том случае, когда первая машина работает в двигательном режиме, а вторая — в режиме динамического торможения. Режим динамического торможения второй машины осуществляется путем подключения обмоток статора к источнику постоянного тока. Электрическая схема и механическая характеристика приведены на рис. 33.
Работа на пониженной скорости может быть достигнута также и при одном асинхронном двигателе. Применяемая для этого электрическая схема и механические характеристики приведены на рис. 34. Введением полупроводникового выпрямителя ВП достигается совмещение двигательного и тормозного режимов. Результирующая характеристика 2 на рис. 34 обладает значительной жесткостью при малых скоростях.
Рассмотренные способы регулирования для получения низких скоростей обладают малым к.п.д., поэтому не применяются при длительных режимах работы.
Рис. 32. Механические характеристики двух асинхронных двигателей’ при работе одного из них в режиме противовключения
Рис. 33. Механические характеристики двух асинхронных двигателей при работе одного из них в режиме динамического торможения
Рис. 34. Механические характеристики асинхронного двигателя (работа на пониженной скорости)
1 — реостатная; 2 — при совмещении двигательного и тормозного режимов
Существуют также более сложные системы регулирования скорости вращения асинхронных двигателей, например импульсная, каскадная и некоторые другие.
Импульсное регулирование скорости — Асинхронные машины (Инженерия)
Импульсное регулирование скорости (рис.1) производится путем периодического включения двигателя в сеть и отключения его от сети или путем периодического шунтирования с помощью контактора К сопротивлений, включенных последовательно в цепь статора, или полупроводниковых вентилей.
Рис.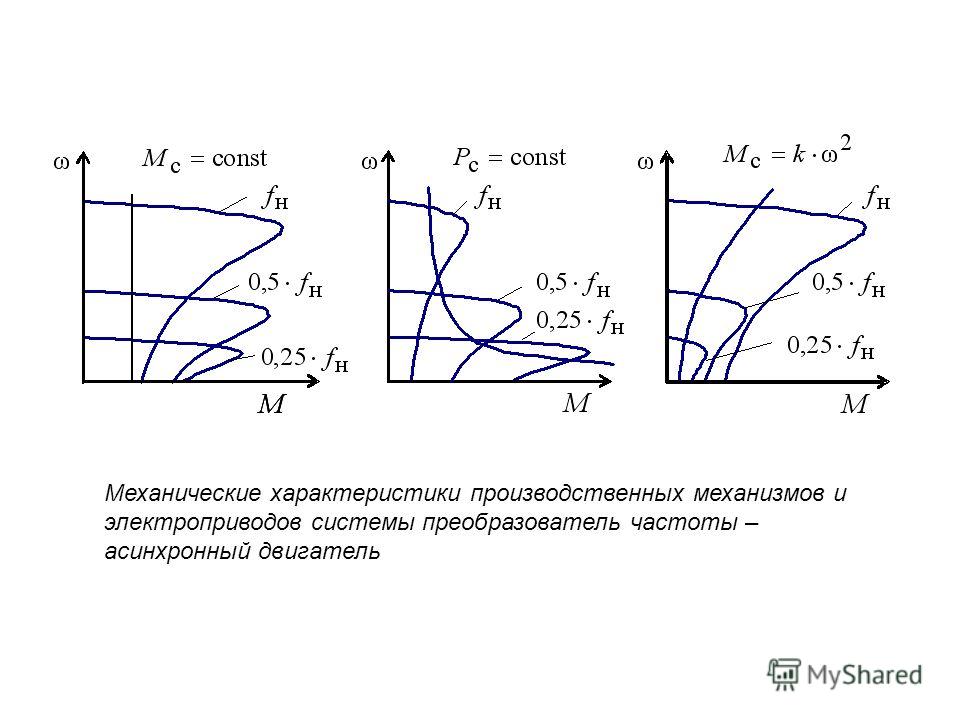 1.
1.
При этом двигатель беспрерывно находится в переходном режиме ускорения или замедления скорости вращения ротора и в зависимости от частоты и продолжительности импульсов работает с некоторой, приблизительно постоянной скоростью вращения. Подобное регулирование скорости применяется только для двигателей весьма малой мощности (рн< 30 — 50 вт).
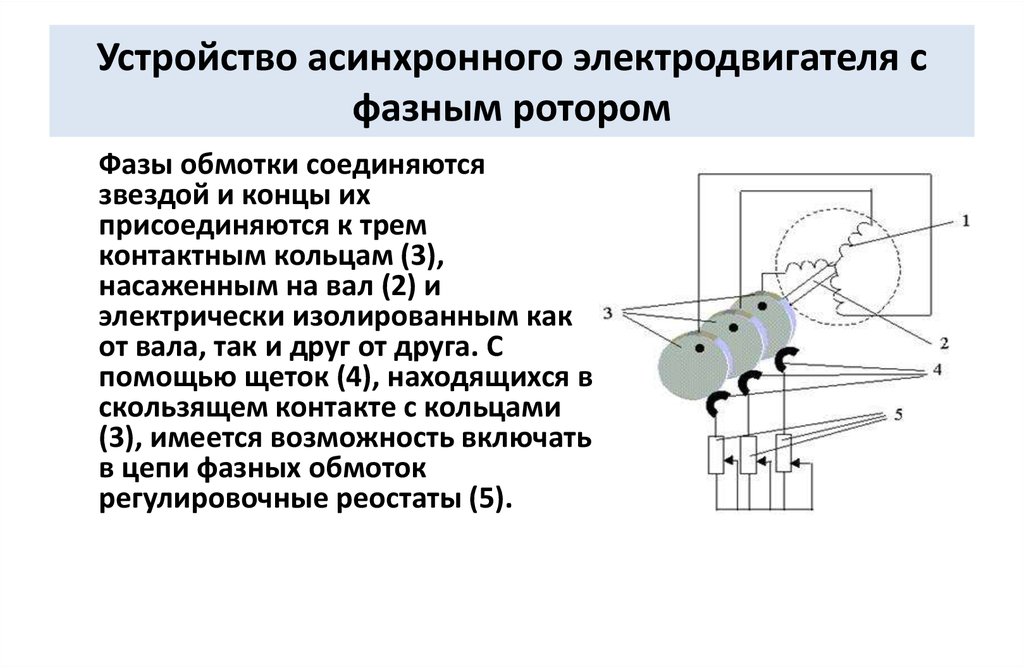
Регулирование скорости вращения асинхронных двигателей с фазным ротором
Для двигателей с фазным ротором можно в принципе использовать все те же способы регулирования скорости вращения, как и для двигателей с короткозамкнутым ротором. Однако на практике из числа этих способов для двигателей с фазным ротором применяется только способ регулирования скорости вращения с помощью реакторов насыщения. Ниже рассмотрим способы регулирования скорости вращения, которые специфичны для двигателей с фазным ротором и в которых используется возможность включения регулирующих устройств во вторичную цепь.
Регулирование скорости вращения с помощью реостата в цепи ротора
Регулирование скорости вращения с помощью реостата в цепи ротора производится по той же схеме, что и реостатный пуск двигателя, но реостат при этом должен быть рассчитан на длительную работу.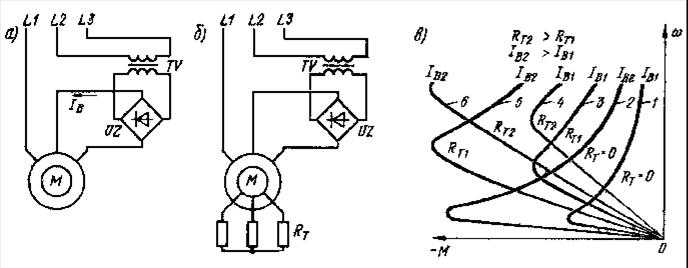 При увеличении активного сопротивления вторичной цепи вид механической характеристики двигателя изменяется
При увеличении активного сопротивления вторичной цепи вид механической характеристики двигателя изменяется
характеристика становится более мягкой и скольжение двигателя при том же моменте нагрузки Мст увеличивается.
При Мст = const рабочее скольжение s с большой точностью пропорционально sm и, следовательно, активному сопротивлению цепи ротора. Поэтому скольжения s и s’, соответствующие случаям rд = 0 и , находятся в соотношении
откуда значение rд, необходимое для получения скольжения s’, равно
Рассматриваемый способ регулирования скорости связан со значительными потерями энергии в сопротивлении rд и поэтому малоэкономичен.
Он применяется главным образом при кратковременной или повторно-кратковременной работе (например, пуско-наладочные режимы некоторых машин, крановые устройства и пр. ), а также в приводах с вентиляторным моментом.
), а также в приводах с вентиляторным моментом.
В последнем случае мощность на валу с уменьшением скорости быстро снижается, и поэтому мощность скольжения и потери в цепи ротора по величине ограничены.
К недостаткам реостатного регулирования скорости относятся также мягкость механических характеристик и зависимость диапазона регулирования от величины нагрузки. В частности, регулирование скорости на холостом ходу практически невозможно.
Регулирование скорости вращения посредством введения добавочной э. д. с. во вторичную цепь двигателя.
Регулирование скорости вращения асинхронного двигателя путем увеличения его скольжения всегда связано с выделением во вторичной цепи двигателя значительной электрической мощности скольжения
большая часть которой при реостатном регулировании теряется в реостате. Поэтому, естественно, возникает мысль о полезном использовании этой мощности и о повышении таким образом к. п. д. установки.
Полезное использование мощности скольжения возможно, если вместо реостата присоединить к контактным кольцам фазного двигателя приемник электрической энергии в виде подходящей для этой цели вспомогательной электрической машины.
Эта машина будет работать в режиме двигателя и оказывать воздействие на регулируемый асинхронный двигатель, развивая напряжение на его вторичных зажимах, так как при вращении вспомогательной машины в ее якоре индуктируется э. д. с.
Можно также сказать, что задачей вспомогательной машины, как и реостата при реостатном регулировании, является создание «подпора » напряжения на контактных кольцах регулируемого асинхронного двигателя, ибо наличие определенного напряжения на кольцах — непременное условие выдачи с этих колец определенной мощности
во внешнюю цепь двигателя. Вместе с тем, вспомогательная машина в отличие от реостата позволяет полезно использовать эту мощность. Прежде всего рассмотрим вопрос о влиянии на работу фазного асинхронного двигателя внешней добавочной э.д.с. Е2, вводимой во вторичную цепь двигателя с помощью его контактных колец, при условии, что частота этой добавочной э. д. с. всегда равна частоте вторичного тока и э. д.с. самого двигателя.
д.с. самого двигателя.
На рис.1,а, изображена векторная диаграмма вторичной цепи асинхронного двигателя при Ед = 0. Вторичный ток двигателя
имеет величину, необходимую для создания нужного электромагнитного момента М в соответствии с величиной момента нагрузки Мст на валу.
Если теперь во вторичную цепь ввести э. д. с. Ед встречно э. д. с. скольжения E2s в этой же цепи, то вторичный ток
в первый момент времени уменьшится. Поэтому развиваемый двигателем момент М также уменьшится, двигатель начнет тормозиться, а скольжение s — увеличиваться. При этом ток Iа, а вместе с ним и момент М будут увеличиваться. Это будет происходить до тех пор, пока опять не наступит равновесие моментов М = Мст„ на валу. Двигатель при этом будет работать с увеличенным скольжением s, а векторная диаграмма вторичной цепи приобретет вид, изображенный на рис. 1,б.
Очевидно, что посредством регулирования величины Ед можно регулировать величину s и, следовательно, скорость вращения двигателя.
Предположим теперь, что э.д.с. Ед имеет по сравнению с рассмотренным случаем противоположное направление и совпадает по фазе с э. д. с. на рис. 1, а. Тогда вместо получим
В лекции «2 Расстройство здоровья и смерть от механических повреждений» также много полезной информации.
В первый момент после введения э. д. с. Ед ток I2 и момент М возрастут, двигатель будет ускоряться и s будет уменьшаться. При достаточной величине Ед величина s уменьшится до нуля, и если ток Iа. создаваемый в этом случае только за счет действия Ед, все еще будет велик по сравнению с током, необходимым для создания момента М = Мст то ускорение двигателя будет продолжаться и скорость превысит синхронную. Скольжение s и э. д. с. при этом изменят знаки и будут расти по абсолютной величине до тех пор, пока ток не упадет до необходимой величины. При s < 0 угол
отрицательный и векторная диаграмма вторичной цепи двигателя имеет вид,
Ток при этом будет иметь составляющую, совпадающую с Ф. Поэтому намагничивающий ток, потребляемый из первичной цепи, уменьшится и cos двигателя повысится.
Таким образом, с помощью добавочной э. д. с. Ед, путем изменения ее величины и направления, можно осуществить плавное двухзонное регулирование скорости двигателя: ниже и выше синхронной.
|
КАТЕГОРИИ: Археология
ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрации Техника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы.
|
⇐ ПредыдущаяСтр 15 из 18Следующая ⇒ В последние 10-25 лет установилась четкая тенденция на переход от привода постоянного тока к приводу переменного тока благодаря совершенствованию законов управления двигателями переменного тока и развитию силовой электроники. Применение двигателей переменного тока обусловлено их простотой, дешевизной, повышенной надежностью, существенно меньшими габаритами и массой по сравнению с двигателями постоянного тока. К недостаткам регулирования скорости можно отнести высокую сложность теории машин переменного тока и алгоритмов управления, закладываемых в преобразовательные устройства. Наибольшее распространение получили следующие способы регулирования угловой скорости асинхронного двигателя: 1) реостатное; 2) изменением напряжения на статоре; 3) переключением числа пар полюсов; 4) изменением частоты питающего напряжения и др.
5.4.1. Реостатное регулирование Схема включения АД при этом способе регулирования представлена на рис. 5.9. Реостатные характеристики получаются путем введения в цепь ротора добавочного сопротивления. При этом с ростом сопротивления падает жесткость МХ. Допустимый диапазон регулирования скорости при данном способе . Так как , то приближенно , где – относительная величина изменения скорости; – относительная величина изменения момента. Из полученной формулы видно, что при равных относительных отклонениях угловой скорости и момента нагрузки диапазон регулирования . При более низком допустимом отклонении угловой скорости диапазон оказывается ещё меньше.
Потери мощности при реостатном регулировании складываются из переменных потерь, включающих потери в меди статора и ротора и во внешних резисторах роторной цепи, и постоянных – не зависящих от нагрузки. Электромагнитная и механическая мощности для АД ; , отсюда можно определить потери в роторе . Видно, что потери пропорциональны величине скольжения и распределяются пропорционально отношению сопротивлений ротора двигателя и добавочного сопротивления в цепи ротора, поэтому двигатель при реостатном регулировании может развивать момент, равный номинальному. Недостатками реостатного регулирования скорости являются ступенчатое регулирование скорости и использование дополнительной аппаратуры, невысокое быстродействие и большие потери энергии при регулировании.
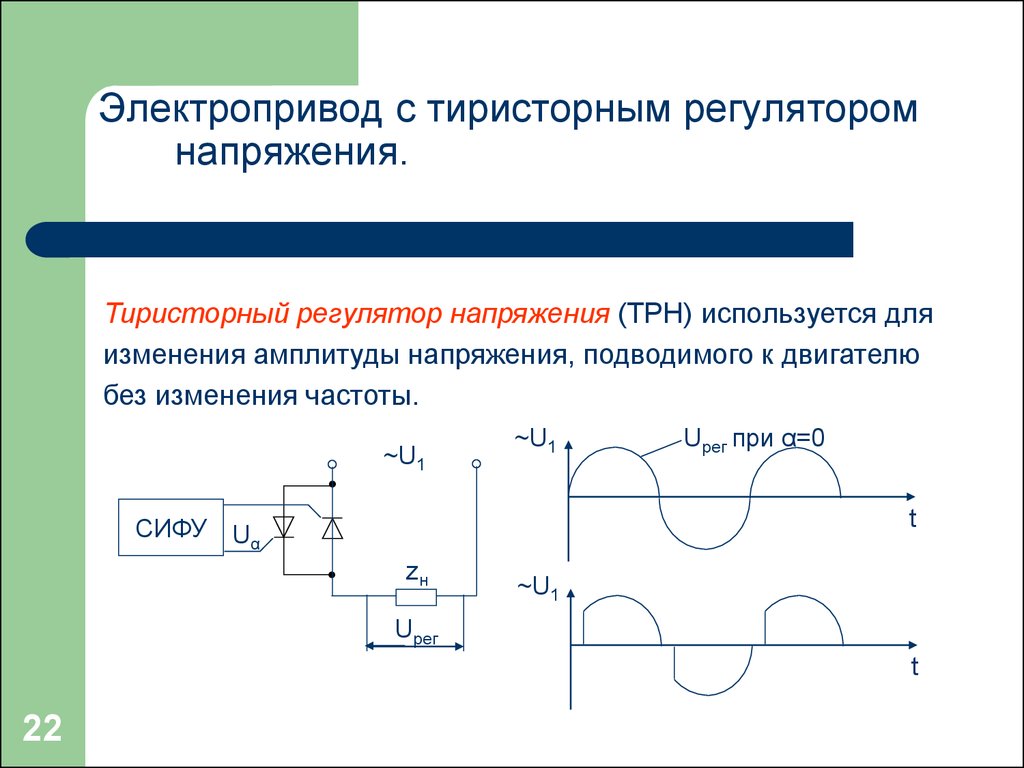
5.4.2. Регулирование угловой скорости АД изменением напряжения на статоре При изменении величины первой гармоники изменяется величина критического момента при постоянстве критического скольжения (рис. 2.28). Такое изменение достигается использованием тиристорного преобразователя напряжения (ТПН). Максимальный момент при уменьшении напряжения снижается пропорционально квадрату напряжения: , где – критический момент при сниженном напряжении; – пониженное напряжение. Из рис. 5.11 видно, что пределы регулирования скорости весьма ограничены, даже при вентиляторной нагрузке. Для расширения диапазона используют замкнутые по скорости САР, структурная схема которой представлена на рис. 5.10. В состав такой САР сходит датчик скорости (BR) и регулятор скорости, на который поступает разность между заданным и текущим значением скоростей. На выходе регулятора скорости вырабатывается сигнал, подающийся на вход системы импульсно-фазного управления, которая вырабатывает управляющие импульсы для ТПН. Особенность такого регулирования заключается в том, что все характеристики сходятся в точке синхронной скорости , поэтому, чем меньше скорость, тем выше скольжение и больше потери в двигателе. Механические характеристики двигателя при фазовом управлении в замкнутой САР скорости представлены на рис.
Двигатель при таком способе регулирования может работать продолжительное время при условии . Допустимый момент можно найти, приравнивая допустимые потери к номинальным , откуда . Кривая допустимого момента по нагреву представлена на рис.5.11. Данный способ регулирования нельзя применять для механизмов, работающих в продолжительном режиме работе с постоянной нагрузкой. Эффективным оказывается использование фазового регулирования для механизмов, у которых статический момент зависит от скорости двигателя , например, для приводов вентиляторов, насосов, компрессоров. Этот способ также применим, когда двигатель работает на пониженных скоростях малое время относительно всего цикла работы, например, лифты. Достоинством фазового управления является более низкая стоимость преобразователя (ТПН) в сравнении с преобразователем частоты (ПЧ) равной мощности, что позволяет для указанных механизмов обеспечить приемлемое качество технологического процесса без дополнительных затрат.
5.4.3. Изменение числа пар полюсов Из выражения для угловой скорости АД: , видно, что регулирование скорости можно осуществлять изменением числа пар полюсов p обмотки статора двигателя. Так как данная величина может быть только целым числом, регулирование скорости оказывается ступенчатым. Для данного вида регулирования изготавливаются многоскоростные АД с КЗР. В пазах сердечника статора размещают либо две независимые обмотки, либо одну полюснопереключаемую. Различают две основные схемы переключения. Схема «звезда/двойная звезда» (рис. 5.12, I-II) обеспечивает регулирование с постоянством момента.
Многоскоростные АД широко применялись в электроприводах, допускающих ступенчатое регулирование частоты вращения (привода лифтов, вентиляторов, станков). Достоинством такого способа является сохранение высоких экономических показателей при переходе с одной частоты вращения на другую, так как на всех ступенях переключения обмотки статора КПД и коэффициент мощности двигателя остаются практически неизменными.
5.4.4. Частотное регулирование скорости асинхронного двигателя Частотный способ регулирования скорости АД является превалирующим и основным. Чем это обуславливается? В первую очередь в настоящее время развита теория машин переменного тока, что позволило найти оптимальные с некоторых позиций законы управления АД. Развитие промышленной электроники позволило в полной мере реализовать данные законы в «железе». Существуют системы скалярного, векторного управления и системы прямого управления моментом. Выбор способа и принципа управления определяется совокупностью статических, динамических и энергетических требований к асинхронному электроприводу. Принцип скалярного управления частотно-регулируемого асинхронного электропривода основан на изменении частоты и текущих значений модулей переменных АД (напряжений, магнитного потока, потокосцеплений и токов цепей двигателя). Этот принцип является наиболее распространённым в связи с тем, что ему свойственна техническая простота измерения и регулирования переменных АД, а так же возможность построения разомкнутых систем управления скоростью. Основной недостаток заключается в трудности реализации желаемых законов регулирования скорости и момента АД в динамических режимах. Принцип векторного управления связан как с изменением частоты и текущих значений переменных АД, так и с взаимной ориентацией их векторов в полярной или декартовой системе координат. Благодаря контролю положения углов переменных такой способ обеспечивает полное управление АД как в статических, так и в динамических режимах, что даёт заметное улучшение качества переходных процессов по сравнению со скалярным управлением. Системы прямого управления моментом являются продолжением и развитием систем векторного управления. Задачей прямого управления моментом является обеспечение быстрой реакции электромагнитного момента двигателя на управляющее воздействие. В отличие от векторного управления, где изменение момента производится путем воздействия на ток статора, в системе с прямым управлением моментом управляемой величиной является потокосцепление статора. Преобразователи частоты, предназначенные для частотно-регулируемых АД, подразделяются по типу связи с питающей сетью на непосредственные ПЧ (НПЧ) и двухзвенные ПЧ (ДПЧ) с промежуточным звеном постоянного или переменного тока. Момент АД пропорционален магнитному потоку и активной составляющей вторичного тока : , где – конструктивная постоянная АД; – угол сдвига между ЭДС и током ротора; . Из формулы для момента видно, что уменьшение магнитного потока, являющееся следствием увеличения частоты , приведет к возрастанию , а следовательно и потерь в роторе и одновременному уменьшению допустимого момента двигателя по условиям охлаждения двигателя. Для реализации указанного закона управления между сетью и двигателем включается преобразователь частоты (ПЧ), обеспечивающий одновременное изменение частоты и амплитуды напряжения на двигателе. При пониженных скоростях у самовентилируемых двигателей уменьшается отвод тепла в окружающую среду, поэтому в таких случаях необходимо снижать допустимый момент на двигателе. При частотном регулировании по причинам, обусловленными механической прочностью подшипников и элементами ротора, поднимать частоту выше . Поэтому основной способ регулирования скорости заключается в уменьшении частоты напряжения. Для построения примерного вида механических характеристик примем, что , тогда уравнение для критического момента можно переписать следующим образом: . Из формулы видно, что критический момент при выполнении закона остаётся постоянным. Условие пренебрежения активного сопротивления статора корректно при высоких скоростях двигателя, когда . При низких скоростях падение напряжения на активном сопротивлении статора становится сопоставимо с величиной напряжения на зажимах статора, что приводит к падению перегрузочной способности двигателя . Для того, чтобы реализовать одинаковую перегрузочную способность при частотном регулировании в области низких частот вращения используют так называемую «IR-компенсацию», которая заключается в том, что на малых скоростях делается добавка напряжения на статоре, компенсирующая . Диапазон регулирования скорости в разомкнутых системах составляет . В замкнутых системах диапазон может быть существенно расширен.
Основные сложности, возникающие при реализации частотного управления заключаются в следующем: 1) для получения в системах ПЧ-АД свойств аналогичных (или даже превосходящих) свойства систем ТП- ДПТ необходимо получение информации о различных параметрах АД; 2) системы являются сильно нелинейными и для получения высококачественных систем необходимо вводить звенья, компенсирующие нелинейность объекта регулирования; 3) закон не является оптимальным, и требуется корректировка закона, учитывающая на валу двигателя; 4) в АД входят параметры , величина которых зависит от степени насыщения машины нелинейно. Кроме этого изменяются значения активных сопротивлений статора и ротора при изменении температуры обмоток двигателя, что также необходимо учитывать. Несмотря на указанные сложности, современные частотные приводы успешно функционируют, обеспечивая высокое качество процесса регулирования скорости.
⇐ Предыдущая9101112131415161718Следующая ⇒ Читайте также: Коммуникативные барьеры и пути их преодоления Рынок недвижимости. Сущность недвижимости Решение задач с использованием генеалогического метода История происхождения и развития детской игры | ||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-16; просмотров: 102; Нарушение авторского права страницы; Мы поможем в написании вашей работы!
infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав.
|
 Определение реакций опор и моментов защемления
Определение реакций опор и моментов защемления
 Суммарные постоянные потери в двигателе остаются примерно одинаковыми независимо от нагрузки и скорости двигателя.
Суммарные постоянные потери в двигателе остаются примерно одинаковыми независимо от нагрузки и скорости двигателя.
 5.11.
5.11. В этом случае завышение установленной мощности двигателя невелико.
В этом случае завышение установленной мощности двигателя невелико.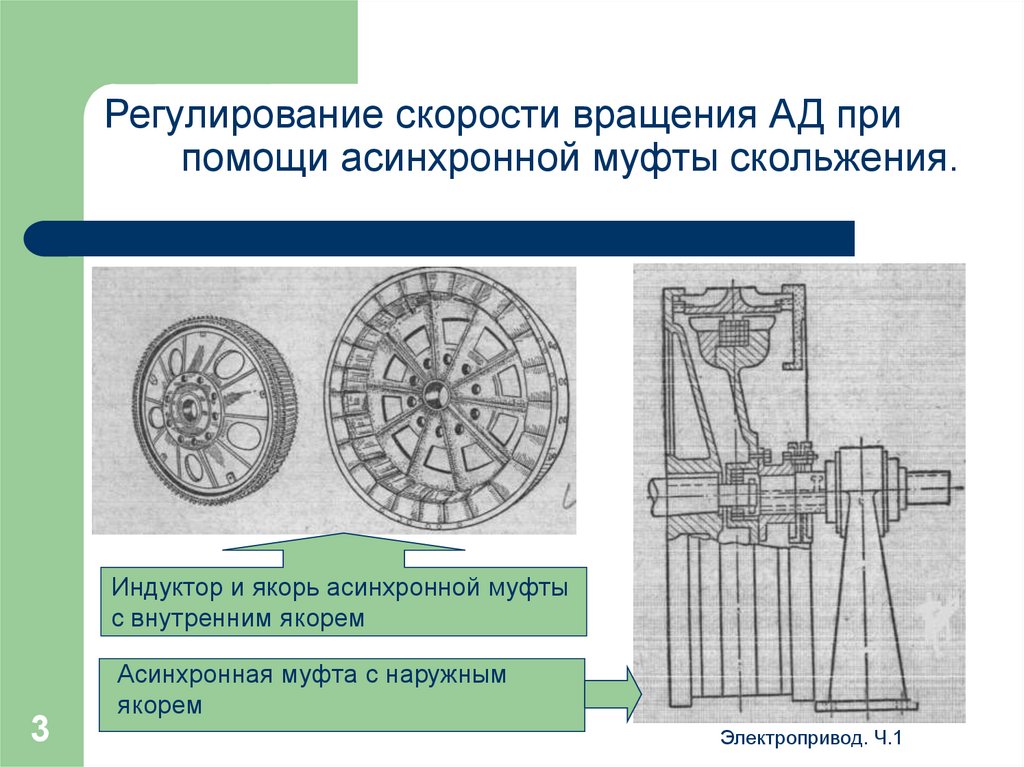 Такую схему целесообразно применять в электроприводе с постоянно действующим моментом нагрузки при изменении частоты вращения. Схема «звезда/звезда» (рис.5.12, I-III) также даёт двукратное изменение числа пар полюсов, однако регулирование происходит при постоянстве мощности, то есть при переключении на повышенную скорость момент уменьшается в два раза. Такие схемы разумно применять в приводах, где момент сопротивления обратно пропорционален частоте вращения. Механические характеристики АД при регулировании скорости изменением числа пар плюсов представлены на рис. 5.13.
Такую схему целесообразно применять в электроприводе с постоянно действующим моментом нагрузки при изменении частоты вращения. Схема «звезда/звезда» (рис.5.12, I-III) также даёт двукратное изменение числа пар полюсов, однако регулирование происходит при постоянстве мощности, то есть при переключении на повышенную скорость момент уменьшается в два раза. Такие схемы разумно применять в приводах, где момент сопротивления обратно пропорционален частоте вращения. Механические характеристики АД при регулировании скорости изменением числа пар плюсов представлены на рис. 5.13.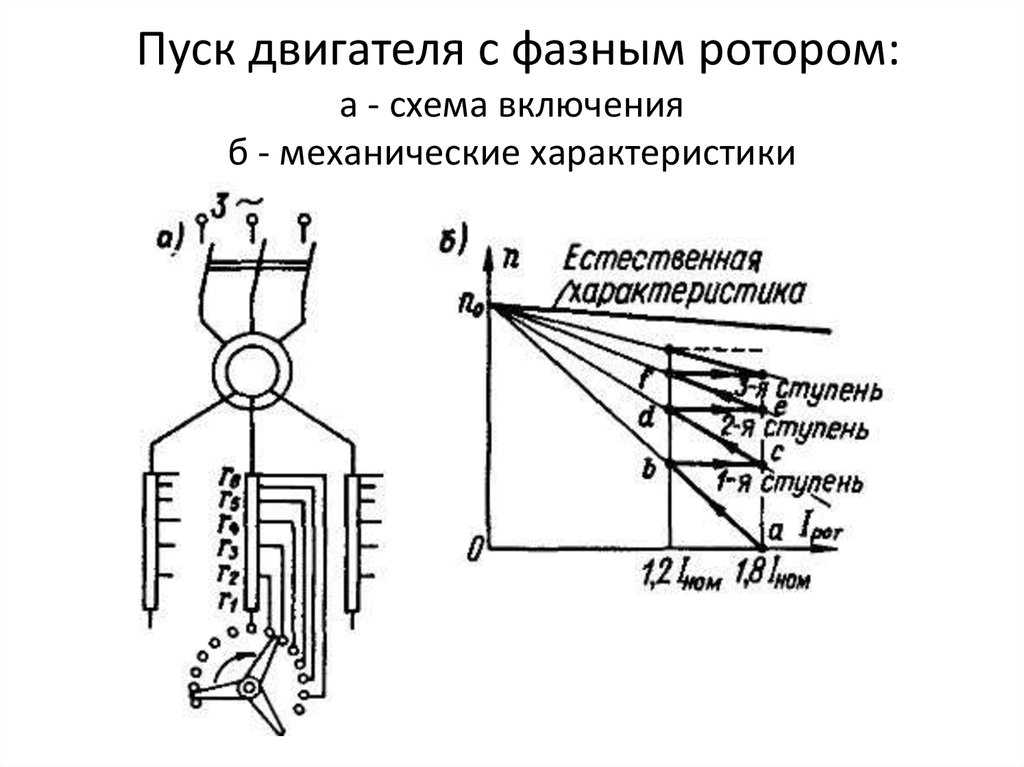 К недостаткам относят большую в сравнении с обычными АД сложность, завышенные габариты, большую стоимость. Кроме того, необходимость переключения обмоток статора на разное число пар полюсов требует усложнения коммутационной аппаратуры, что так же приводит к возрастанию цены электропривода в целом. В настоящее время этот способ вытесняется частотным регулированием.
К недостаткам относят большую в сравнении с обычными АД сложность, завышенные габариты, большую стоимость. Кроме того, необходимость переключения обмоток статора на разное число пар полюсов требует усложнения коммутационной аппаратуры, что так же приводит к возрастанию цены электропривода в целом. В настоящее время этот способ вытесняется частотным регулированием.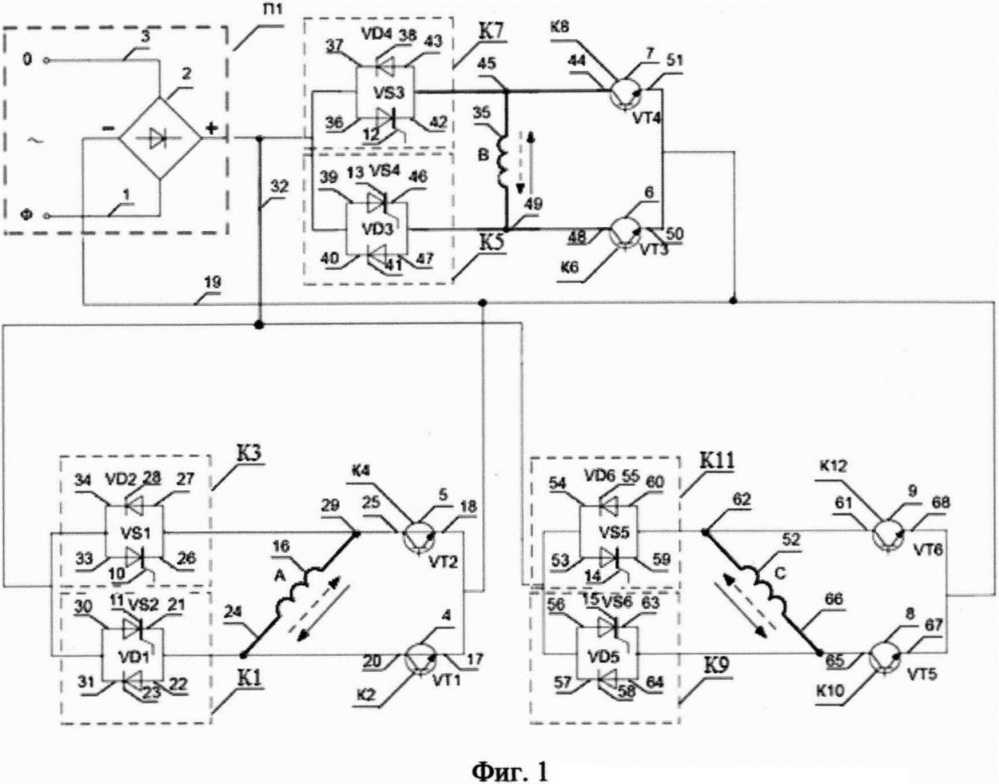

 Уменьшение частоты при постоянстве амплитуды напряжения , как было показано в п. 4.3.3, также не допустимо по условиям насыщения магнитной системы машины. поэтому регулирование скорости двигателя изменением частоты питающего напряжения при условии постоянства момента двигателя приемлемо только при одновременном изменении амплитуды питающего напряжения, то есть выполнении закона , что обеспечивает практически постоянный магнитный поток в двигателе.
Уменьшение частоты при постоянстве амплитуды напряжения , как было показано в п. 4.3.3, также не допустимо по условиям насыщения магнитной системы машины. поэтому регулирование скорости двигателя изменением частоты питающего напряжения при условии постоянства момента двигателя приемлемо только при одновременном изменении амплитуды питающего напряжения, то есть выполнении закона , что обеспечивает практически постоянный магнитный поток в двигателе.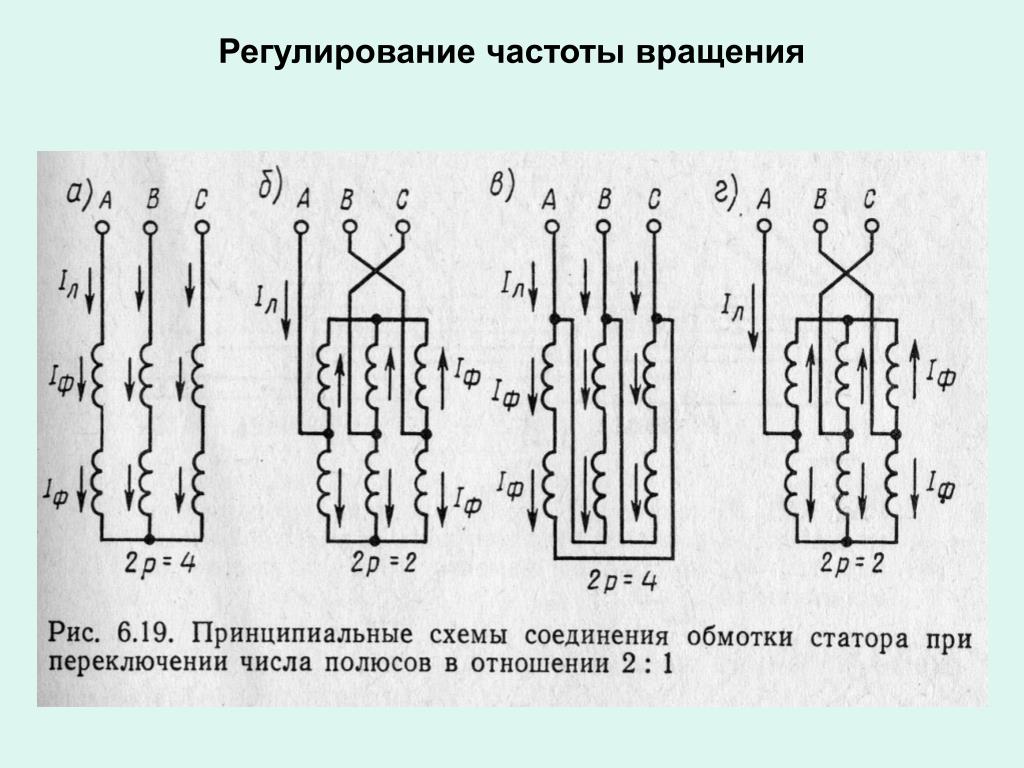
 5.14. Схема включения АД
5.14. Схема включения АД

 Обратная связь — 161.97.168.212 (0.013 с.)
Обратная связь — 161.97.168.212 (0.013 с.)Регулирование угловой скорости асинхронного электродвигателя изменением числа пар полюсов на статоре
Переключение — число — пары — полюс
| Механические характеристики двухскоростного асинхронного двигателя. |
Переключение числа пар полюсов достигается изменением схемы соединения статорной обмотки. Роторы многоскоростных двигателей выполняются короткозамкнутыми. На рис. 3 — 18 приведены механические характеристики двухскоростного двигателя. Переход с высшей скорости вращения на низшую при переключении числа пар полюсов, как показано на графике, сопровождается торможением с отдачей энергии в сеть. Механические характеристики сохраняют свою жесткость при переходе с одной скорости вращения на другую.
Схема реверсирования трехфазного, асинхронного электродви гателя.| Механические характеристики трехфазного асинхронного электродвигателя при регулировании угловой скорости ротора изменением частоты переменного тока. |
Переключение числа пар полюсов асинхронных электродвигателей обеспечивает ступенчатое регулирование частоты вращения, жесткие механические характеристики и отличается экономичностью.
Переключение числа пар полюсов асинхронного электродвигателя дает ступенчатое регулирование скорости вращения, жесткие механические характеристики и отличается экономичностью.
Путем переключения числа пар полюсов можно изменять частоту вращения только большими ступенями, например: 3000, 1500, 1000, 500 об / мин. Возможность изменения числа пар полюсов в одном двигателе достигается усложнением его устройства, увеличением размеров и значительным повышением стоимости. Поэтому многоскоростные двигатели строят не более чем на четыре скорости.
Переключение числа полюсов при различном соединении секций.| Включение Включение обмоток по схеме обмоток по схеме звезды двойной звезды. | Переключение обмоток с треугольника на двойную звезду. | Переключение обмоток с треугольника на двойную звезду. |
Возможность переключения числа пар полюсов путем изменения схемы обмотки иллюстрирует рис. 3.65. При соединении секций обмотки, как показано на рис. 3.65, а, получают четыре полюса, а по схеме рис. 3.65, б — два. Такие переключения производят в трех фазах, а переключаемые части обмоток могут соединяться параллельно или последовательно.
Регулирование переключением числа пар полюсов является сравнительно простым способом, не требующим больших капитальных затрат. Экономичность регулирования весьма высока. Скорость при регулировании меняется не плавно, а ступенями. Уменьшение синхронной скорости ниже 300 — 375 об / мин обычно не производится, так как оно приводит к значительному увеличению габаритов двигателей.
| Процесс регулирования скорости электродвигателя. |
Электродвигатели с переключением числа пар полюсов поля статора изготовляются на две, три и четыре скорости.
Регулирование скорости двигателей переключением числа пар полюсов возможно лишь в двигателе с короткозамкнутым ротором, так как только у этого двигателя число полюсов ротора всегда соответствует числу полюсов статора.
| Схема включения тепловых реле в обмотку статора двигателя, пуск которого осуществляется переключением звезды на треугольник. а-соединение в зоезду. b — в треугольник. |
У двигателей с переключением числа пар полюсов случается, что токи в подводящей линии и в самой обмотке при разной скорости вращения ротора значительно отличаются друг от друга.
Получение пониженной скорости путем переключения числа пар полюсов осуществляется в многоскоростном двигателе; при этом величина рабочей скорости определяется известным рядом синхронных скоростей: 3000, 1 500, 1 000, 750 и 500 об / мин. Двигатели со скоростями, меньшими 500 об / мин, редко изготовляются, следовательно, начальная скорость перед окончательным торможением может быть снижена максимум в 6 раз.
Регулирование частоты вращения изменением скольжения
Изменять скольжение асинхронного двигателя можно разными способами: изменением подводимого к статору напряжения, введением сопротивления в цепь ротора или введением в цепь ротора дополнительной ЭДС.
При изменении напряжения статора механическая характеристика двигателя изменяется, как показано на рис. 4.33. Снижение напряжения приводит к уменьшению жесткости механической характеристики и росту скольжения. При этом частота вращения ротора снижается,. Регулирование частоты вращения таким способом возможно в ограниченном диапазоне изменения скольжения. Основным недостатком этого способа регулирования частоты вращения является низкий КПД из-за роста потерь в обмотке ротора пропорционально частоте скольжения.
Поэтому он применяется только для двигателей малой мощности, работающих в системах автоматического управления.
В двигателях с фазным ротором изменить частоту вращения можно путем изменения сопротивления в роторе (рис. 4.34). Преимущество данного способа регулирования частоты состоит в том, что максимальный момент остается неизменным
4.34). Преимущество данного способа регулирования частоты состоит в том, что максимальный момент остается неизменным
Важно также отметить, что часть потерь двигателя выносится в резистор, тем самым облегчается тепловой режим двигателя. В остальном способ аналогичен предыдущему и характеризуется низким КПД., малым диапазоном регулирования, зависящим от нагрузки, и «мягкой» механической характеристикой
Чтобы повысить КПД двигателя при регулировании частоты вращения путем изменения скольжения, необходимо мощность скольжения использовать для совершения полезной работы или возвратить обратно в сеть. Схемы, реализующие эту идею, называются каскадными. Одной из распространенных схем данного типа является схема асинхронно-вентильного каскада (рис. 4.35).
Схема включает асинхронный двигатель с фазным ротором (АД), диодный выпрямитель (Д), сглаживающий дроссель (Др), тиристорный инвертор (И) и сетевой согласующий трансформатор (Тр). Регулирование частоты вращения осуществляется посредством изменения напряжения инвертора. Это приводит к соответствующему изменению напряжения обмотки ротора, а следовательно, и частоты вращения ротора. Мощность частоты скольжения, извлекаемая из роторной обмотки двигателя, передается в сеть через согласующий трансформатор. Достоинством каскадных схем регулирования частоты вращения асинхронных двигателей по сравнению с частотными схемами управления в статорной цепи (рис. 4.28) является то, что полупроводниковый преобразователь выполняется на мощность скольжения, а не на полную мощность двигателя
Это приводит к соответствующему изменению напряжения обмотки ротора, а следовательно, и частоты вращения ротора. Мощность частоты скольжения, извлекаемая из роторной обмотки двигателя, передается в сеть через согласующий трансформатор. Достоинством каскадных схем регулирования частоты вращения асинхронных двигателей по сравнению с частотными схемами управления в статорной цепи (рис. 4.28) является то, что полупроводниковый преобразователь выполняется на мощность скольжения, а не на полную мощность двигателя
Это обстоятельство особенно важно для мощных и сверхмощных приводов насосов, прессов, конвейеров, подъемных механизмов и др., где требуется ограниченный диапазон регулирования частоты вращения (2:1 и менее).
Асинхронно-вентильный каскад с неуправляемым выпрямителем допускает регулирование только вниз от синхронной частоты вращения. Если использовать управляемый выпрямитель, то можно осуществить регулирование частоты вращения вверх от синхронной
В этом случае направление передачи мощности скольжения меняется на противоположное.
- Назад
- Вперёд
Помогла ли вам статья?
Задать вопрос
Пишите ваши рекомендации и задавайте вопросы в комментариях
Способы регулирования скорости асинхронного двигателя
Асинхронный
двигатель является наиболее массовым
электрическим двигателем. Эти
двигатели выпускаются мощностью от 0,1
кВт до нескольких тысяч киловатт и
находят применение во всех отраслях
хозяйства. Основным достоинством
асинхронного двигателя является простота
его конструкции и невысокая стоимость.
Однако по принципу своего действия
асинхронный двигатель в обычной схеме
включения не допускает регулирования
скорости его вращения. Особое внимание
следует обратить на то, что во избежание
значительных потерь энергии, а,
следовательно, для короткозамкнутых
асинхронных двигателей во избежание
перегрева его ротора, двигатель должен
работать в длительном режиме с минимальными
значениями скольжения.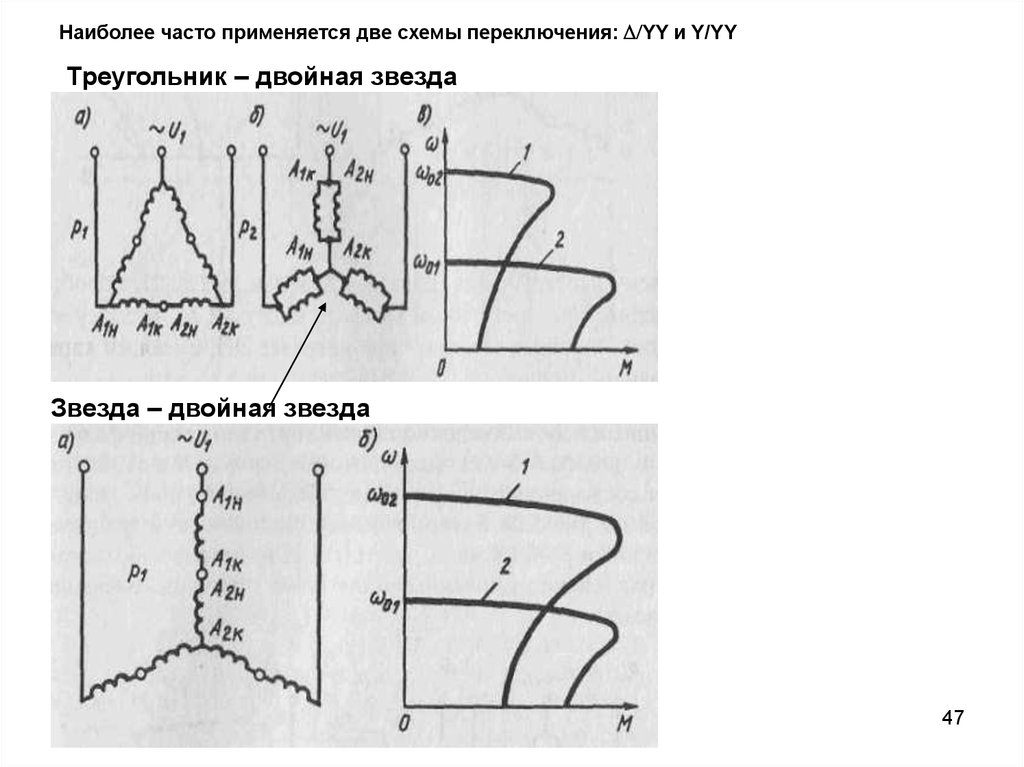
Рассмотрим
возможные способы регулирования скорости
асинхронных двигателей (см. рис.6.1).
Скорость двигателя определяется
двумя параметрами: скоростью вращения
электромагнитного поля статора ω0и скольжениемs:
ω
= ω0
– sабс
ω
= ω0
– ω0s
(6.1)
Рис.6.1.
Классификация способов регулирования
асинхронных двигателей
Исходя
из (6.1) принципиально возможны два способа
регулирования скорости: регулирование
скорости вращения поля статора и
регулирование скольжения при постоянной
величине ω0.
Скорость
вращения поля статора определяется
двумя параметрами (см.3.3): частотой
напряжения, подводимого к обмоткам
статора _f1, и
числом пар полюсов двигателярп.
В соответствии с этим возможны два
способа регулирования скорости:
изменение частоты питающего напряжения
посредством преобразователей частоты,
включаемых в цепь статора двигателя
(частотное регулирование), и путем
изменения числа пар полюсов двигателя.
Регулирование
скольжения двигателя при постоянной
скорости вращения поля статора для
короткозамкнутых асинхронных
двигателей возможно путем изменения
величины напряжения статора при
постоянной частоте этого напряжения.
Для асинхронных двигателей с фазным
ротором, кроме того, возможны еще два
способа: введение в цепь
ротора добавочных сопротивлений
(реостатное регулирование) и
введение в цепь ротора добавочной
регулируемой э.д.с. посредством
преобразователей частоты, включаемых
в цепь ротора (асинхронный вентильный
каскад и двигатель двойного питания).
В
настоящее время благодаря развитию
силовой преобразовательной техники
созданы и серийно выпускаются различные
виды полупроводниковых преобразователей
частоты, что определило опережающее
развитие и широкое применение
частотно-регулируемого асинхронного
электропривода. Основными достоинствами
Основными достоинствами
этой системы регулируемого электропривода
являются:
плавность
регулирования и высокая жесткость
механических характеристик, что
позволяет регулировать скорость в
широком диапазоне;экономичность
регулирования, определяемая тем,
что двигатель работает с
малыми величинами абсолютного
скольжения, и потери в двигателе не
превышают номинальных.
Недостатками
частотного регулирования являются
сложность и высокая стоимость
(особенно для приводов большой мощности)
преобразователей частоты и сложность
реализации в большинстве схем режима
рекуперативного торможения.
Изменение
скорости переключением числа пар полюсов
асинхронного двигателя позволяет
получать несколько (от 2 до 4) значений
рабочих скоростей, т.е. плавное
регулирование скорости и формирование
переходных процессов при этом способе
невозможно. Поэтому данный способ имеет
определенные области применения, но не
может рассматриваться, как основа для
построения систем регулируемого
электропривода.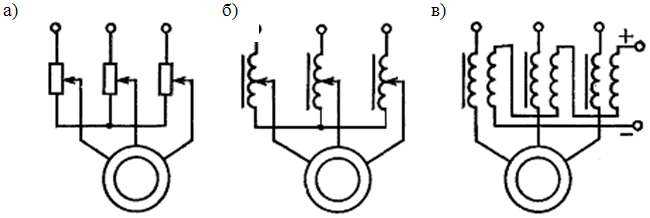
Регулирование
скорости асинхронного двигателя
изменением величины питающего
напряжения при постоянной (стандартной)
его частоте для асинхронных двигателей
с короткозамкнутым ротором имеет
ограниченное применение вследствие
того, что регулирование скорости здесь
сопряжено с потерями энергии скольжения,
выделяющимися в роторе двигателя и
ведущими к его перегреву. Получаемые
при этом способе механические
характеристики неблагоприятны для
качественного регулирования. Диапазон
регулирования не превышает 1,5:1; более
глубокое регулирование скорости можно
допускать только кратковременно. Исходя
из данной оценки, регулирование
изменением величины питающего напряжения
применяется, главным образом, только
для обеспечения плавного пуска
нерегулируемых асинхронных электроприводов
или для кратковременного снижения
скорости. Иногда этот способ регулирования
используется для регулирования скорости
насосов и вентиляторов (механизмов с
вентиляторным характером нагрузки)
небольшой мощности (до 15 кВт), однако и
в этом случае необходимо увеличение
установленной мощности двигателя.
Для
асинхронных двигателей с фазным ротором
регулирование скорости может
производиться воздействием на роторную
цепь двигателя. При введении добавочного
сопротивления в цепь ротора энергия
скольжения рассеивается не в объеме
двигателя, а в сопротивлениях. Этот
способ регулирования оценивается как
неэкономичный. При использовании
релейно-контакторных схем исключается
плавность регулирования скорости. В
настоящее время управление с введением
добавочных сопротивлений в цепь ротора
используется, в основном, для пуска
асинхронных двигателей с фазным
ротором. Электроприводы с
реостатно-контакторным управлением не
рассматриваются нами, как регулируемые
электроприводы.
Все
способы регулирования, основанные на
изменении скольжения асинхронного
двигателя, связаны с выделением энергии
скольжения в роторной цепи двигателя.
В рассматриваемых выше способах эта
энергия расходовалась на нагрев обмотки
ротора и роторных сопротивлений.
Существуют системы регулируемого
электропривода, в которых энергия
скольжения не теряется в сопротивлениях,
а используется полезно – возвращается
в питающую сеть, что делает регулирование
в этих системах экономичным. К таким
К таким
системам регулируемого привода относятся
асинхронные вентильные каскады и
двигатели двойного питания. Особенностью
каскадных схем асинхронного привода
является ограниченный диапазон
регулирования – не больше, чем 2:1. В этом
диапазоне каскадные схемы обеспечивают
плавное и экономичное регулирование
скорости. Такие системы электропривода
наиболее целесообразны для мощных
турбомеханизмов-насосов и вентиляторов.
Контроллеры асинхронных двигателей переменного тока
Асинхронные двигатели переменного тока являются промышленными рабочими лошадками благодаря своей простой и недорогой конструкции. Они обычно используются в тяге для электромобилей. Асинхронные двигатели переменного тока все чаще используются в робототехнике и автоматизации благодаря усовершенствованному электронному управлению. Roboteq предлагает растущую линейку одноканальных и двухканальных частотно-регулируемых приводов для асинхронных двигателей переменного тока с током от 60 до 500 А на канал. Просто сопоставьте номинальные значения напряжения и тока, используя приведенные ниже таблицы продуктов или средство поиска продуктов.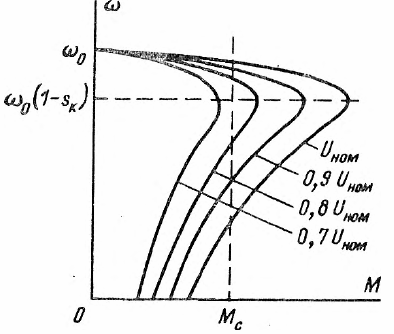
Семейная SIM-карта
Маломощный/компактный
Семейство FIM
Средняя мощность
Семейство HIM
Высокая мощность / Воздушное охлаждение
Семейство GIM
Очень высокая мощность
Перейти к выбору продуктов
Купить продукты
Асинхронные двигатели переменного тока являются одними из самых простых в интерфейсе. Это связано с тем, что для работы в самом базовом режиме им требуется только 3-проводное соединение. Более эффективное управление может быть достигнуто с помощью передовых алгоритмов, таких как поле-ориентированное управление (FOC).
Контроллеры Roboteq можно использовать практически с любым асинхронным двигателем переменного тока в указанном диапазоне мощности и напряжения.
Feedback | Description | Advantages/ Disadvantages | |
|---|---|---|---|
Scalar / VpH | Simple, open-loop mode where Voltage and Frequency change together с фиксированным передаточным числом | Pro: самый простой, всегда работает с любым двигателем Con: неэффективная с переменной нагрузкой | |
Контролируемый скольжение | Encoder | Режим замкнутой петли, который регулирует напряжение частота, чтобы сохранить скольжение в пределах оптимальной дальности 9999999969966996699696969696969696696696696696696696696696696969696969696669. . Эффективный, простой в настройке Минусы: не оптимально. Только управление скоростью | |
FOC — Управление крутящим моментом | Энкодер | Эффективный режим крутящего момента с замкнутым контуром, который использует Ориентированный на поле управление | Pro: Наиболее эффективные Con: комплексная настройка |
FOC — Управление скоростью | Encoder | Эффективная режима Lo | Плюсы: Самый эффективный Минусы: Комплексная настройка |
Доступны четыре режима привода: от простейшего скалярного до самого сложного режима полевого управления. Работа с вашим мотором будет простой и удобной. Экспертные инструменты и поддержка позволят вам точно настроить и получить максимальную отдачу от вашего двигателя.
Как работают асинхронные двигатели
Добавьте датчик магнитной направляющей Roboteq, и вы получите полностью функциональную машину с автоматическим управлением по линии, состоящую всего из двух компонентов.
Сделайте его еще лучше с нашей системой управления батареями для литиевых батарей, добавьте модуль расширения ввода-вывода для роботов (RIOX) с IMU для дополнительной стабильности. Используйте подходящие мотор/колеса в сборе от наших проверенных партнеров по двигателям. Загрузите программное обеспечение для магнитной навигации и получите бесплатную экспертную поддержку от Roboteq, чтобы все это работало вместе для вас!
Как построить AGV с магнитным управлением
Узнать о BMS Roboteq
Узнать о Roboteq IO eXtender и IMU
Нашими контроллерами можно управлять практически из любого места. От простых кнопок до джойстиков, радио, ПЛК или компьютеров, Roboteq может взаимодействовать с ним. Имеется большое количество импульсных/аналоговых/цифровых входов для концевых выключателей, потенциометров, энкодеров, кнопок или датчиков. Цифровые выходы обеспечивают торможение, освещение или соленоиды. Нужно больше ИО? Используйте наш RIOX IO eXtender через CANbus и не знайте ограничений!
Вот некоторые из ключевых слов, которые понимают все наши контроллеры благодаря встроенному языку программирования MicroBasic.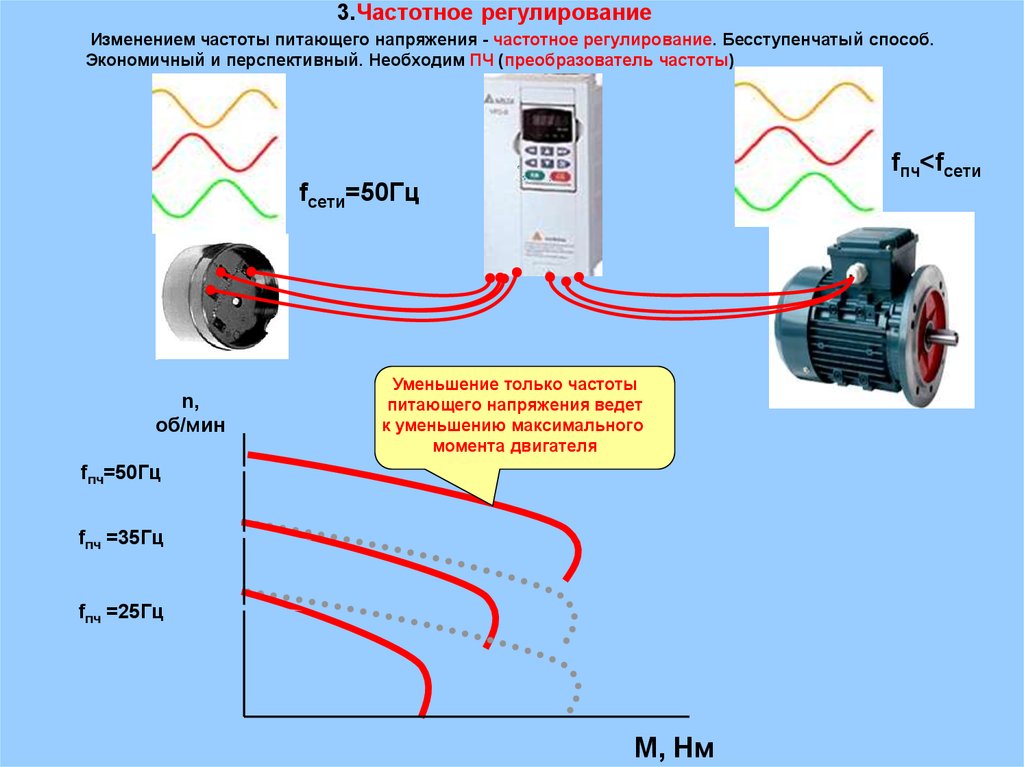 Думайте об этом как о встроенном ПЛК прямо в контроллер без дополнительной оплаты. Эта эксклюзивная функция Roboteq позволит вам настроить контроллер в соответствии с вашими самыми необычными требованиями.
Думайте об этом как о встроенном ПЛК прямо в контроллер без дополнительной оплаты. Эта эксклюзивная функция Roboteq позволит вам настроить контроллер в соответствии с вашими самыми необычными требованиями.
Узнайте о сценариях MicroBasic
Все наши контроллеры имеют интерфейс CANbus 1 Мбит. Используя простую пару проводов, вы можете заставить два или более контроллера работать вместе, подключиться к джойстикам, ПЛК, системам управления батареями или любому другому интеллектуальному датчику. А благодаря четырем различным доступным протоколам CAN вы можете быть уверены, что они смогут понять друг друга.
Узнайте о ячеистой сети RoboCAN
Нет необходимости в специальных инструментах программирования. Загрузите нашу бесплатную утилиту Roborun+ для ПК и начните изучать возможности!
Контроллеры бесщеточных двигателей работают за счет создания вращающегося магнитного поля внутри катушек двигателя. Затем следуют магниты ротора, вызывая вращение.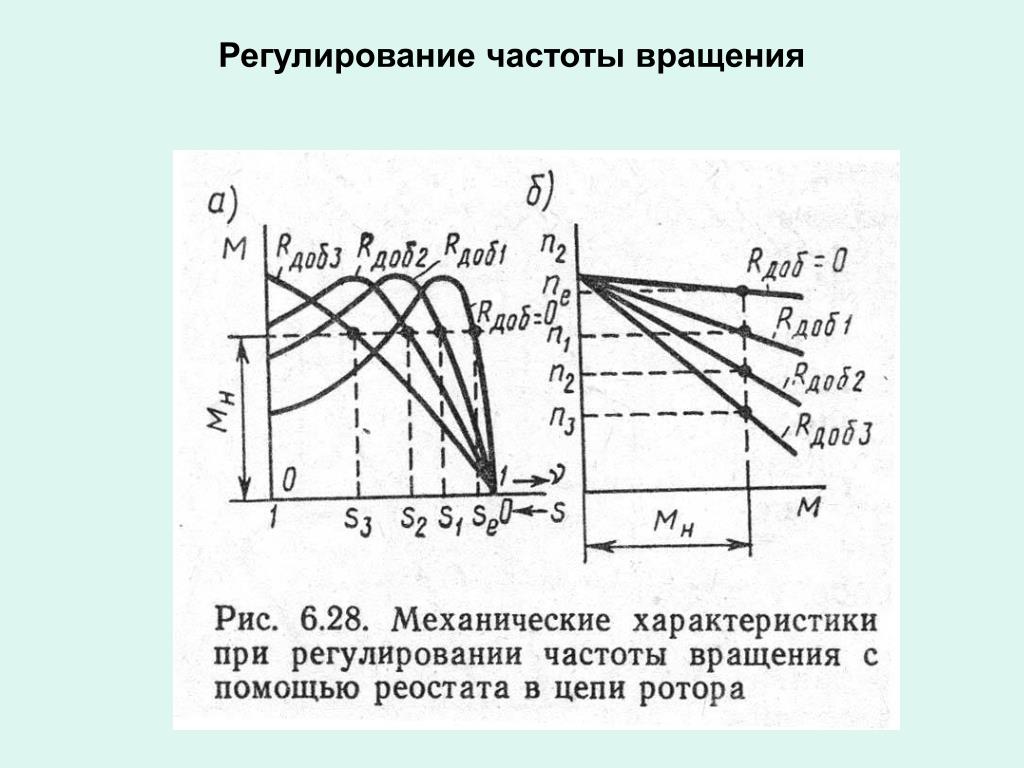 В дополнение к обычному грубому 6-ступенчатому трапецеидальному вращению контроллеры Roboteq способны к более точному и тихому 512-ступенчатому синусоидальному вращению. Благодаря усовершенствованному полево-ориентированному управлению (FOC) двигатель всегда работает с оптимальной эффективностью.
В дополнение к обычному грубому 6-ступенчатому трапецеидальному вращению контроллеры Roboteq способны к более точному и тихому 512-ступенчатому синусоидальному вращению. Благодаря усовершенствованному полево-ориентированному управлению (FOC) двигатель всегда работает с оптимальной эффективностью.
Что такое поле-ориентированное управление?
Высокая мощность при низком напряжении означает большой ток. Большой ток означает тепло. А чрезмерная жара означает беду! Полевые МОП-транзисторы со сверхвысокой эффективностью, сильноточные клеммы и проводка, а также инновационные методы охлаждения — это лишь некоторые из технологий, которые использует Roboteq, чтобы сделать наши контроллеры одними из самых крутых для своего размера.
Подробнее о токах и нагреве
Наши контроллеры являются одними из самых сложных на рынке, но также и самыми простыми в использовании благодаря подробной документации, программным инструментам и примерам применения.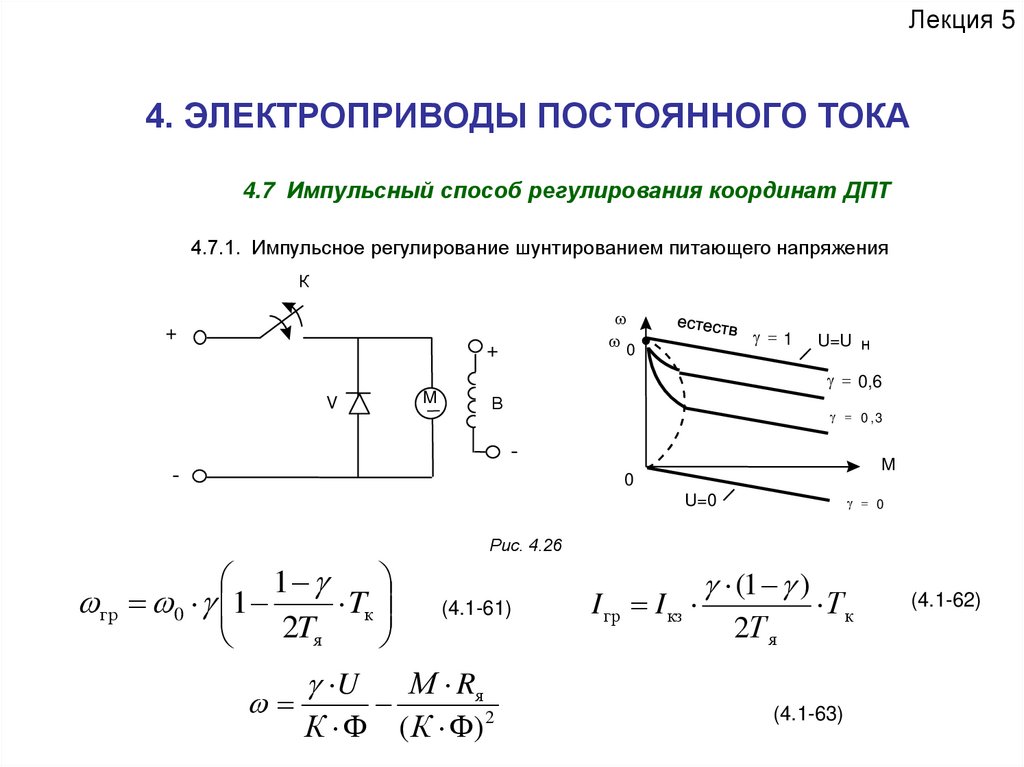 Однако, если вы столкнетесь с трудностями, вы можете быть уверены, что получите быстрые и точные ответы от нашей превосходной службы поддержки. В конце концов, мы можем добиться успеха только в том случае, если вы добьетесь успеха!
Однако, если вы столкнетесь с трудностями, вы можете быть уверены, что получите быстрые и точные ответы от нашей превосходной службы поддержки. В конце концов, мы можем добиться успеха только в том случае, если вы добьетесь успеха!
Наша помощь в применении
Двухканальные контроллеры асинхронных двигателей переменного тока средней мощности. Усовершенствованная 32-разрядная технология, несколько вариантов подключения и поддержка сценариев. До 2 х 60А. Кондуктивная охлаждающая пластина с крышкой из АБС-пластика. Предназначен для AGV и небольших электромобилей.
Просмотреть продукты семейства SIM
Компактные маломощные двухканальные контроллеры асинхронных двигателей переменного тока. Усовершенствованная 32-разрядная технология, несколько вариантов подключения и поддержка сценариев. До 2 х 30А. Кондуктивная охлаждающая пластина с крышкой из АБС-пластика. Предназначен для AGV и небольших электромобилей.
Просмотреть продукты семейства FIM
Двухканальные контроллеры асинхронных двигателей переменного тока средней мощности. Усовершенствованная 32-разрядная технология, несколько вариантов подключения и поддержка сценариев. До 1 х 150 А или 2 х 75 А. Построен в экструдированном алюминиевом корпусе. Ориентирован на мобильных роботов и небольшие электромобили.
Усовершенствованная 32-разрядная технология, несколько вариантов подключения и поддержка сценариев. До 1 х 150 А или 2 х 75 А. Построен в экструдированном алюминиевом корпусе. Ориентирован на мобильных роботов и небольшие электромобили.
Посмотреть продукты семейства HIM
Очень мощные одноканальные многофункциональные контроллеры асинхронных двигателей переменного тока. Усовершенствованная 32-разрядная технология, несколько вариантов подключения и поддержка сценариев. До 300А. Несколько вариантов напряжения до 96В. Охлаждающая пластина с толстой проводимостью с крышкой из АБС-пластика. Предназначен для электромобилей, бронетранспортеров, автомобилей для гольфа, погрузочно-разгрузочного оборудования, электрических лодок, транспортных средств с автоматическим управлением, сельскохозяйственных роботов и других приложений с высокой мощностью.
Посмотреть продукты семейства GIM
Электрические машины — асинхронные машины
Изменение скорости асинхронного двигателя
Машины с ротором в клетке
Анализ кривой скорости крутящего момента асинхронной машины показывает, что асинхронный двигатель найдет устойчивую равновесную рабочую точку на скорости между тяговой и синхронной скоростью. Для типичных двигателей класса B расчетное рабочее скольжение составляет менее 0,05. Хотя асинхронные машины могут работать в состоянии покоя, нормальный диапазон рабочих скоростей находится в небольшом диапазоне проскальзываний чуть ниже синхронной скорости. Чтобы изменить скорость асинхронной машины, синхронная скорость должна измениться. С
Для типичных двигателей класса B расчетное рабочее скольжение составляет менее 0,05. Хотя асинхронные машины могут работать в состоянии покоя, нормальный диапазон рабочих скоростей находится в небольшом диапазоне проскальзываний чуть ниже синхронной скорости. Чтобы изменить скорость асинхронной машины, синхронная скорость должна измениться. С
\[
n_s=\frac{120p}{f}
\]
есть два варианта: изменить количество полюсов или изменить частоту питания.
Замена полюсов
Изменение количества полюсов в машине дает набор дискретных рабочих скоростей. например если машина может иметь 2 или 6 полюсов, она может работать со скоростью примерно 1200 об/мин или 3600 об/мин (при частоте питания 60 Гц). Изменение количества полюсов может быть выполнено либо путем использования резервных обмоток статора и переключения между обмотками (что является дорогостоящим), либо путем повторного подключения катушек для изменения ориентации проводников для изменения количества магнитных полюсов. Смена полюсов не очень распространена в трехфазных машинах, и в основном ее заменяют источниками переменной частоты. Одно из наиболее распространенных применений двигателей с переключением полюсов было в традиционных стиральных машинах с вертикальной загрузкой для переключения между циклами стирки и отжима.
Смена полюсов не очень распространена в трехфазных машинах, и в основном ее заменяют источниками переменной частоты. Одно из наиболее распространенных применений двигателей с переключением полюсов было в традиционных стиральных машинах с вертикальной загрузкой для переключения между циклами стирки и отжима.
Блок питания переменной частоты
Если доступен источник переменной частоты, синхронная скорость
индукционная машина теоретически может быть установлена на любое желаемое значение. Однако существуют практические и безопасные ограничения, ограничивающие работу. При работе с переменной частотой нам обычно интересно понять, как управлять машиной, чтобы обеспечить требуемый крутящий момент на определенной частоте. До сих пор мы рассчитывали отношения крутящий момент-скорость при одной частоте питания, теперь нам нужно подумать о том, как изменяется крутящий момент при изменении частоты. 92R_2}{с\омега_с}
\]
Если напряжение на ветви ротора определяется как \(V_2\), то
\[
I_2=\frac{V_2}{\frac{R_2}{s}+j\omega_e L_2}
\]
Первое предположение при анализе работы привода с регулируемой скоростью состоит в том, что в установившемся режиме машина будет работать при малых значениях, и поэтому разумно сказать, что
\[
\frac{R_2}{s} \gg \omega_e L_2\textrm{ , } \quad R_2 \gg s\omega_e L_2
\]
Следовательно: 92 \ гидроразрыва {\ omega_ {sl}} {R_2}
\end{выровнено}
\]
Этот последний шаг показывает, что при определенных условиях создаваемый крутящий момент пропорционален частоте скольжения.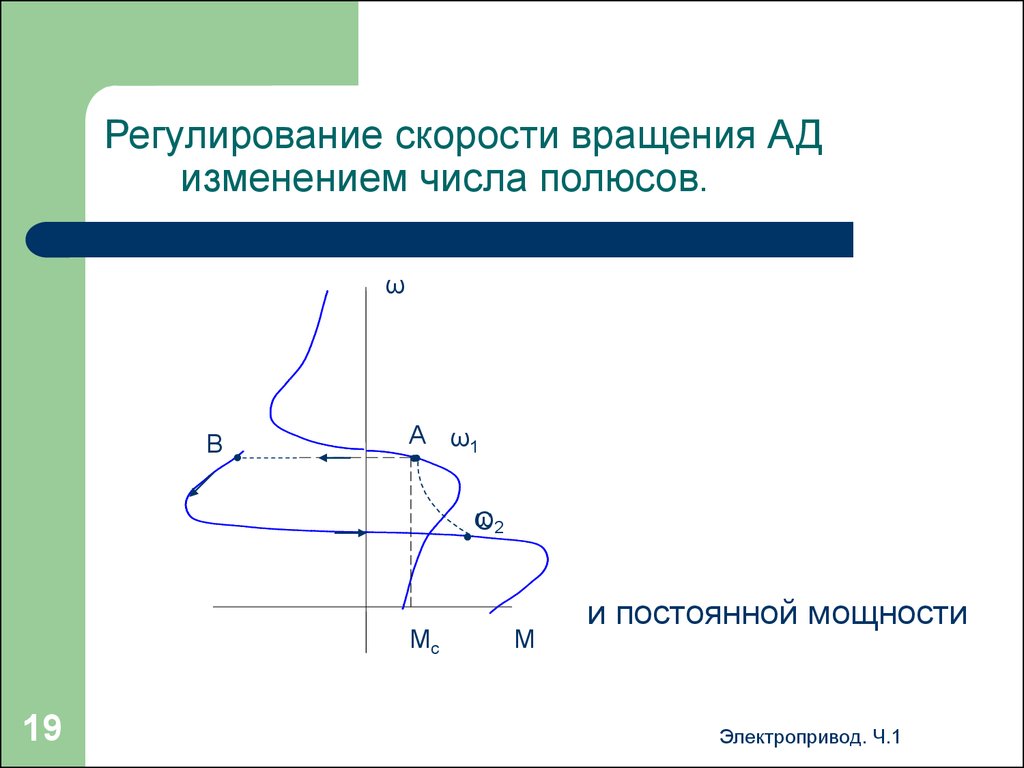
На самом деле, если соотношение \(\frac{V_2}{\omega_e}\) постоянно, крутящий момент будет пропорционален частоте скольжения. Рассмотрим другой подход к определению \(V_2\):
\[
V_2=j \omega_e L_m I_m
\]
и
\[
\начать{выравнивать*}
\влево| \frac{V_2}{\omega_e} \right| & = L_m I_m \\
\влево| \frac{V_2}{\omega_e} \right| & = \лямбда
\конец{выравнивание*}
\] 92 сн_с
\]
Рабочие области
Скорость ниже номинальной — область постоянного потока
Если мы хотим эксплуатировать асинхронную машину со скоростью ниже номинальной, то можно достичь полного крутящего момента, если поддерживать номинальный поток. Учитывая, что поток определяется зависимостью напряжения от частоты, для большей части рабочего диапазона скорости ниже номинальной скорости (частота вращения, указанная на паспортной табличке, т. е. при питании 60 Гц или 50 Гц), номинальный поток можно получить, сохраняя отношение напряжения к частоте постоянным. (По сути, если предположить, что константа \(\frac{V_1}{f}\) константа дает константу \(\frac{V_2}{f}\) . ) Это называется постоянной операцией Вольт на Герц. Однако, если машина работает на низких частотах (например, менее 1/4 номинальной),
) Это называется постоянной операцией Вольт на Герц. Однако, если машина работает на низких частотах (например, менее 1/4 номинальной),
падение напряжения на сопротивлении статора будет значительным. (Поскольку реактивные сопротивления становятся меньше,
р 1 становится пропорционально больше.) На низких частотах питание статора
напряжение должно быть компенсировано, чтобы обеспечить дополнительное падение напряжения на сопротивлении статора, в противном случае
крутящий момент упадет.
Скорость выше номинальной — область ослабления поля
Если машина должна работать на частоте выше номинальной, напряжение не может
будет увеличено выше номинального напряжения, и ток намагничивания в машине будет уменьшен. Этот
режим работы называется режимом ослабления поля.
Резюме
- При частоте ниже номинальной сохраняйте соотношение V/f постоянным при номинальных значениях.
- На низких частотах отношение V/f должно быть повышено, чтобы поддерживать
номинальный крутящий момент.
- Частота выше номинальной, поддерживайте номинальное напряжение.

Приведенные выше утверждения могут быть использованы в качестве основы для относительно простого управления скоростью без обратной связи. Это обычно называется управлением V/f с разомкнутым контуром.
Пример
Четырехполюсный двигатель 480 В, 60 Гц имеет номинальную скорость 1750 об/мин и номинальный крутящий момент 10 Нм. Если
нужен крутящий момент 10 Нм при механической скорости 1500 об/мин, найти синхронную скорость, частоту питания
и линейное напряжение питания.
При номинальном крутящем моменте скорость скольжения будет равна номинальному значению. Для 4-полюсной машины 60 Гц,
синхронная скорость 1800 об/мин, поэтому номинальная скорость скольжения =1800-1750=50 об/мин. При работе на
1500 об/мин, 10 Нм, скорость скольжения по-прежнему будет 50 об/мин, а синхронная скорость задается
\[
\начать{выравнивать*}
n_s&=n_m+sn_s\
н_с & = 1500 + 50
\конец{выравнивание*}
\]
При синхронной скорости можно найти частоту сети
\[
\начать{выравнивать*}
n_s & = \frac{120 f_e}{p} \\
f_e & = \frac{n_s p}{120} = \frac{1550 \times 4}{120} \\
f_e & = 51,67 Гц
\конец{выравнивание*}
\]
Наконец, если V/f постоянно, напряжение питания должно быть:
\[
\начать{выравнивать*}
V_{{LL}_{новый}} & = 51,67 \frac{480}{60} \\
V_{{LL}_{новый}} & = 413,3 В
\конец{выравнивание*}
\]
Источник переменного напряжения и переменной частоты
Большинство современных приводов используют источники питания с широтно-импульсной модуляцией (ШИМ) для аппроксимации переменного напряжения и частоты.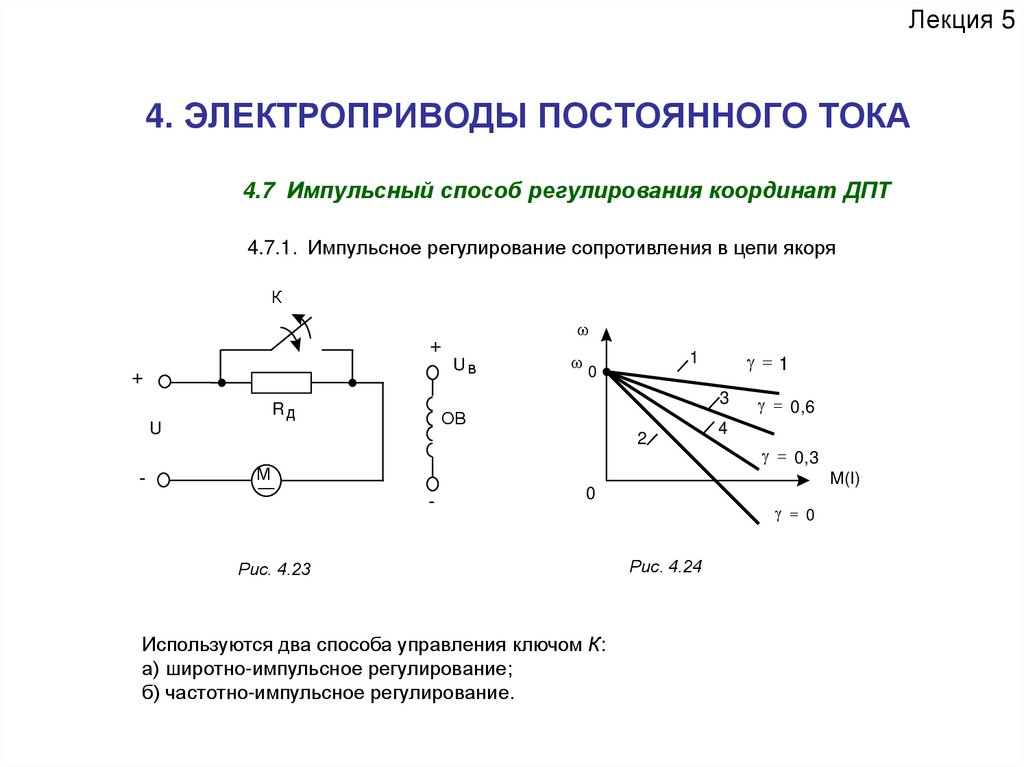
синусоидальное питание. В источнике ШИМ напряжение постоянного тока быстро переключается, чтобы приблизиться к форме желаемой формы волны. В простейшей для понимания реализации желаемое (модулирующее) напряжение сравнивается с треугольной формой несущей волны. Если форма модулирующего сигнала на единицу больше, чем форма несущей на единицу, выход подключается к положительной клемме источника постоянного тока. Если форма модулирующего сигнала на единицу меньше, чем форма несущей на единицу, выход подключается к отрицательной клемме звена постоянного тока. Это показано на рис. 2 для случая, когда напряжения в звене постоянного тока определены как +VDC и 0V.
Рис. 2. Интерактивный график напряжений ШИМ для двух фаз трехфазной сети. В этой анимации несущая частота ограничена как минимум 11-кратной частотой модуляции.
Роторные машины для намотки
Если ротор асинхронной машины выполнен с полной трехфазной обмоткой, к которой можно получить доступ через токосъемные кольца, скорость машины можно регулировать, регулируя цепь ротора, в то время как
напряжение питания статора и частота остаются постоянными.
Рассмотрим эквивалентную схему асинхронной машины с фазным ротором, когда
цепь ротора не относится к статору, показанному на рис. 3.
Индуцированное напряжение ротора \(E_R\) является функцией скольжения и частоты фактических цепей ротора (и величины \(X_R\)) также является функцией скольжения, как описано при разработке модели пофазной эквивалентной схемы. Однако в асинхронной машине с фазным ротором эффективное соотношение оборотов в состоянии покоя \(a_{eff}\) фактически известно. Его можно определить, измерив напряжение на клеммах ротора холостого хода, когда ротор неподвижен. Как и в процессе разработки традиционной модели пофазной эквивалентной схемы, компоненты ротора могут быть отнесены к стороне статора (первичной) трансформатора с делением на скольжение, чтобы учесть изменение индуцированных напряжений ротора при изменении скорости, как показано на рис. Рис. 4.
Напряжение фазы на клеммах ротора, относящееся к статору, можно рассматривать как напряжение, подаваемое в цепь ротора, и определяется как:
\[
V_i=a_{eff} V_R
\]
Рис. 3. WRIM с ротором в качестве вторичного контураРис. 4. WRIM на фазную цепь в установившемся режиме
3. WRIM с ротором в качестве вторичного контураРис. 4. WRIM на фазную цепь в установившемся режиме
Принцип работы и анализ
С учетом эквивалентной схемы, если подаваемое напряжение увеличивается, ток ротора будет уменьшаться, что приводит к уменьшению доступного крутящего момента, создаваемого двигателем. Если к двигателю приложена нагрузка, ротор замедлится, что приведет к увеличению скольжения. Учитывая модель схемы с использованием трансформатора между статором и ротором, по мере увеличения скольжения индуцированное напряжение ротора \(E_R\) увеличивается, а ток ротора \(I_R\) будет увеличиваться. Это представляет то, что физически происходит в машине. В модели схемы с переменными ротора, относящимися к статору, ток ротора, относящийся к статору \(I_2\), увеличивается по мере того, как эффективное инжектируемое напряжение, воспринимаемое статором \(V_i/s\), уменьшается по мере увеличения скольжения. Этот процесс позволяет машине найти новое устойчивое состояние, при котором индуцированный ток ротора создает достаточный крутящий момент, равный крутящему моменту нагрузки. {\ гидроразрыва {1} {2}}
{\ гидроразрыва {1} {2}}
\end{выровнено}
\] 9\frac{1}{2} — I_2 R_{TH}
\end{выровнено}
\]
Мощность и крутящий момент
Принимая во внимание приведенную выше диаграмму и помня, что подаваемое напряжение находится в фазе с током ротора, мощность воздушного зазора машины (полный поток мощности от статора к ротору) может быть записана как:
\[
P_{пробел}=3I_2\frac{V_i + I_2 R_2} {s}
\]
Учитывая, что для всех асинхронных машин
\[
\ тау = \ гидроразрыва {P_ {разрыв}} {\ omega_s}
\]
крутящий момент может быть записан как 9\frac{1}{2} — I_2 R_{TH}\right)
\end{выровнено}
\]
Первое из двух приведенных выше уравнений дает крутящий момент как функцию скольжения, тока ротора и подаваемого напряжения ротора. Второе уравнение показывает, что при заданном крутящем моменте ток ротора \(I_2\) должен быть постоянным. В свою очередь, это означает, что при постоянном крутящем моменте отношение
\[
\frac{V_i + I_2 R_2} {s} \rightarrow \textbf{константа}
\]
Наконец, рассмотрим компоненты потока мощности мощности воздушного зазора. Мощность воздушного зазора представляет собой сумму мощности, потерянной в цепи ротора, потока мощности, выходящего из вывода ротора, и мощности, преобразованной в механическую энергию. Поскольку предполагается, что подаваемое напряжение находится в фазе с током ротора, мощность на клеммах ротора будет просто \(3 V_i I_2\). Компоненты мощности воздушного зазора: 9\frac{1}{2} — I_2 R_{TH}}
Мощность воздушного зазора представляет собой сумму мощности, потерянной в цепи ротора, потока мощности, выходящего из вывода ротора, и мощности, преобразованной в механическую энергию. Поскольку предполагается, что подаваемое напряжение находится в фазе с током ротора, мощность на клеммах ротора будет просто \(3 V_i I_2\). Компоненты мощности воздушного зазора: 9\frac{1}{2} — I_2 R_{TH}}
\]
Если крутящий момент равен нулю, то ток ротора также будет равен нулю. Следовательно, при нулевом крутящем моменте
проскальзывание без нагрузки, \(s_0\), определяется как
\[
s_0 = \frac{V_i}{V_{TH}}
\]
Эффективность
Поскольку часть мощности, подаваемой на двигатель, рекуперируется из цепи ротора,
КПД нельзя рассчитать просто как выходную мощность над входной мощностью статора. Вместо этого в машине с фазным ротором с источником переменного напряжения и частоты, подключенным к ротору, КПД составляет
\[
\eta= \frac{P_{выход}}{P_{статор}-P_{ротор}}
\]
где \(P_{stator}\) и \(P_{rotor}\) — потоки мощности на клеммах статора и ротора соответственно.
Режимы работы асинхронной машины с фазным ротором
Как отмечалось выше, крутящий момент может быть записан как:
\[
\tau = 3I_2\frac{V_i + I_2 R_2} {s \omega_s}
\]
В двигателе крутящий момент положителен. Поэтому для любого заданного положительного крутящего момента, когда мы регулируем скорость, скольжение изменяется и \(I_2\) останется постоянным. Для двигателя, независимо от скольжения,
\[
\frac{V_i + I_2 R_2} {s} \gt 0
\]
Точно так же для генератора крутящий момент отрицателен. Независимо от скорости
\[
\frac{V_i + I_2 R_2} {s} \lt 0
\]
- Подсинхронный двигатель
В этом режиме скольжение и крутящий момент положительны, поэтому подаваемое напряжение должно быть в фазе с током ротора. Энергия поступает в статор и обратно из цепи ротора.
\[
s \gt 0 \mspace{24mu} \frac{V_i + I_2 R_2} {s} \gt 0 \mspace{12mu} \rightarrow \mspace{12mu} \ V_i + I_2 R_2 \gt 0
\] - Суперсинхронный двигатель
Скорость выше синхронной, скольжение отрицательное.
Чтобы крутящий момент был положительным,\[
s \lt 0 \mspace{24mu} \frac{V_i + I_2 R_2} {s} \gt 0\mspace{12mu} \rightarrow \mspace{12mu} \ V_i + I_2 R_2 \lt 0
\]Следовательно, напряжение и ток должны быть не в фазе друг с другом. Мощность вводится в
ротор от цепи привода подключен к токосъемным кольцам, помимо входной мощности, поступающей в статор - Суперсинхронная генерация
При генерации выше синхронной скорости скольжение и крутящий момент отрицательны, поэтому
\[
s \lt 0 \mspace{24mu} \frac{V_i + I_2 R_2} {s} \lt 0\mspace{12mu} \rightarrow \mspace{12mu} \ V_i + I_2 R_2 \gt 0
\]Подаваемое напряжение совпадает по фазе с током ротора. В этом случае механический ввод
мощность подается с вала, и обе цепи статора и ротора обеспечивают выходную мощность. - Подсинхронная генерация
Если требуется генерация ниже синхронной скорости, крутящий момент должен быть отрицательным, а скольжение положительным. Опять же,
\[
s \gt 0 \mspace{24mu} \frac{V_i + I_2 R_2} {s} \lt 0\mspace{12mu} \rightarrow \mspace{12mu} \ V_i + I_2 R_2 \lt 0
\]Следовательно, напряжение и ток должны быть не в фазе друг с другом.
Мощность вводится в
ротор от цепи привода соединен с контактными кольцами.
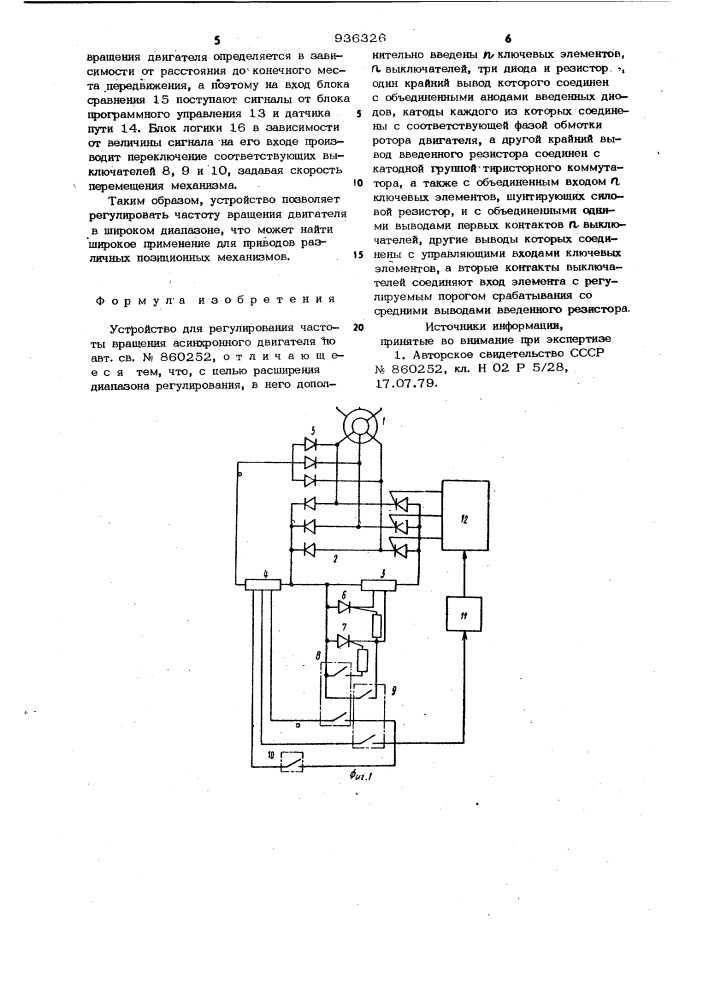 Чтобы крутящий момент был положительным,
Чтобы крутящий момент был положительным, Мощность вводится в
Мощность вводится вКомментарий
В современной реализации управления приводом для асинхронной машины с фазным ротором приведенный выше анализ применим, если напряжение на клеммах ротора поддерживается в фазе с током ротора. Также можно управлять работой машины, вводя реактивную мощность через клеммы ротора, уменьшая потребность в реактивной мощности обмотки статора. (Эффективно можно использовать клеммы ротора для обеспечения тока намагничивания). Реализация управления фазовым углом напряжения ротора является относительно сложной задачей, которая выходит за рамки этих заметок.
Асинхронные машины с фазным ротором способны работать до номинального крутящего момента при проскальзывании, не близком к синхронной скорости. При подаче напряжения в цепь ротора кривая скорости вращения смещается так, что скорость холостого хода не соответствует синхронной скорости. WRIM способны к субсинхронной генерации и суперсинхронному двигателю. Используемые в качестве «асинхронных генераторов с двойным питанием», они используются в ветряных турбинах типа 3, которые в настоящее время являются наиболее распространенным типом ветряных турбин. Машины с раневым ротором также демонстрируют потенциал для использования в гидроаккумуляторах с регулируемой скоростью.
Используемые в качестве «асинхронных генераторов с двойным питанием», они используются в ветряных турбинах типа 3, которые в настоящее время являются наиболее распространенным типом ветряных турбин. Машины с раневым ротором также демонстрируют потенциал для использования в гидроаккумуляторах с регулируемой скоростью.
Все о регулировании скорости судовых электродвигателей
Стандартный короткозамкнутый ротор переменного тока асинхронный двигатель работает как привод почти с постоянной скоростью во всем диапазоне нагрузок. Это свойство удовлетворительно для большинства вспомогательных служб судна, питающих вентиляторы и циркуляционные насосы.
Регулятор скорости необходим для кранов, лебедок, брашпилей, шпилей, вентиляторов с принудительной тягой и т. д. двигатели или переменного тока асинхронные двигатели для приложений малой/средней мощности.
Электродвигатель большой мощности, напр. для пассажирского круизного лайнера будет использоваться переменный ток. синхронные двигатели.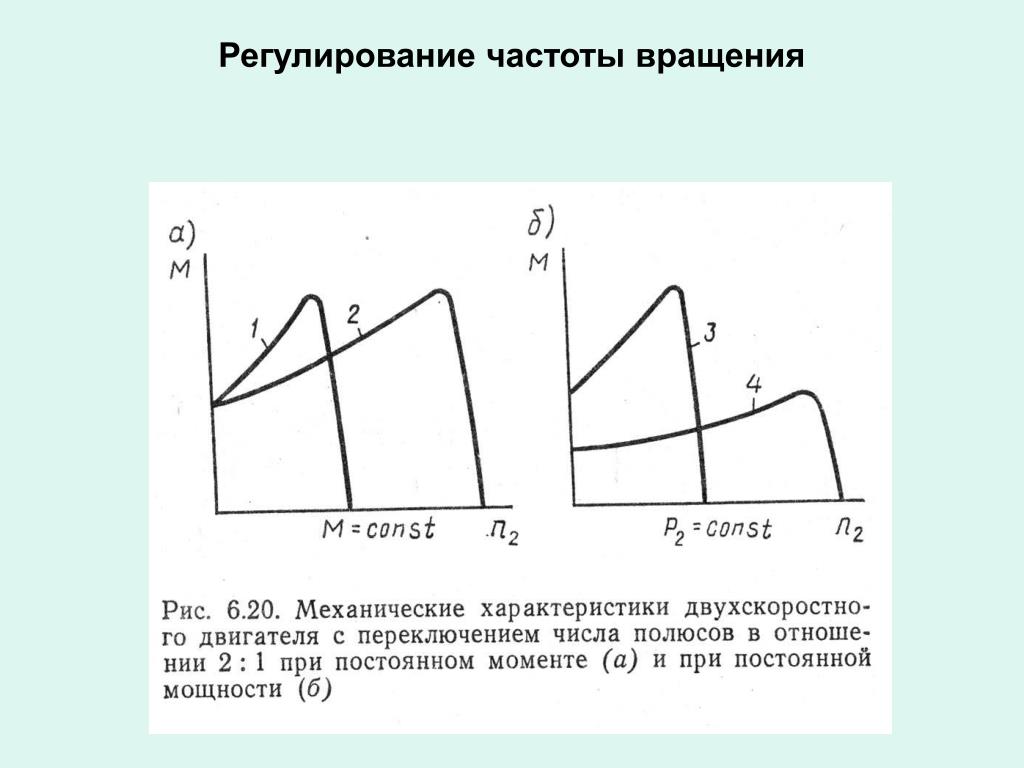
Доступны две основные формы изменения/управления скоростью:
Переключение полюсов асинхронных двигателей для обеспечения двух или более фиксированных скоростей:
2-скоростные нагнетательные вентиляторы
3-скоростные лебедки
Бесступенчатая регулировка скорости, напр. плавное управление палубными кранами, лебедками и электродвижителями судов с использованием переменной частоты.
Фиксированные заданные скорости можно получить от асинхронного двигателя с короткозамкнутым ротором, используя обмотку статора с двойной обмоткой, каждая обмотка предназначена для создания различного числа магнитных полюсов.
3-скоростной двигатель судовой лебедки с переключением полюсов может быть оснащен двумя роторами в клетке, установленными на одном приводном валу.
Одна обмотка статора (обычно 2-полюсная) обеспечивает низкую скорость вращения, а другая двухвитковая
обеспечивает среднюю скорость (8-полюсная) и высокую скорость (4-полюсный) выхода.
Управление скоростью и направлением движения осуществляется с помощью набора переключающих и реверсивных контакторов, управляемых с пульта управления лебедкой.
Помните, что для реверсирования вращения асинхронного двигателя необходимо переключить две линии питания на обмотку статора.
Альтернативным методом, обеспечивающим две фиксированные скорости в соотношении 2:1 от асинхронного двигателя с короткозамкнутым ротором, является использование одной обмотки статора с соединениями с центральным отводом на каждой фазе. В этом методе используется пускатель с набором контакторов для переключения фазных обмоток либо на одинарная звезда (низкая скорость) или двойная звезда (высокая скорость).
Две питающие линии перепутаны местами при соединении по схеме «двойная звезда» – это необходимо для сохранения того же направления вращения, что и при низкоскоростном соединении.
Бесступенчатая регулировка скоростей управления судовыми двигателями требует больше усилий и затрат, чем требуется для получения пары заданных скоростей.
Доступны различные методы, включая:
Электрогидравлический привод.
Контроль сопротивления асинхронных двигателей
Ward-Leonard d.c. моторный привод.
Управление асинхронным или синхронным двигателем с переменной частотой.
Электрогидравлический привод , часто используемый для управления палубным краном, имеет относительно простую электрическую часть. Это постоянный односкоростной асинхронный двигатель, питаемый от пускателя прямого пуска или звезды-треугольника.
Двигатель работает постоянно, чтобы поддерживать давление масла в гидравлических двигателях с регулируемой скоростью.
Грубая форма управления скоростью обеспечивается асинхронным двигателем с фазным ротором.
Ротор имеет трехфазную обмотку (аналогичную обмотке статора), которая соединена с тремя контактными кольцами, установленными на валу.
Внешний 3-фазный блок резисторов подключен к щеткам контактных колец ротора. Набор контакторов или ползунок (для небольших двигателей) изменяет величину сопротивления, добавляемого в цепь ротора.
Набор контакторов или ползунок (для небольших двигателей) изменяет величину сопротивления, добавляемого в цепь ротора.
Увеличение значения внешнего сопротивления снижает скорость вращения ротора.
Как правило, пускатели двигателей с фазным ротором блокируются, чтобы разрешить пуск только при максимальном сопротивлении ротора в цепи.
Преимущество этого заключается в снижении скачков пускового тока при одновременном обеспечении высокого пускового момента.
Устройство с фазным ротором дороже, чем эквивалентная машина с ротором в клетке. Он требует большего обслуживания из-за токосъемных колец и внешнего блока резисторов, для которых могут потребоваться специальные средства охлаждения.
Там, где необходимо сочетать бесступенчатую регулировку скорости с высоким крутящим моментом, плавным ускорением, включая управление толчковым режимом и рекуперативное торможение, необходимо учитывать преимущества преобразователя постоянного тока. моторный привод.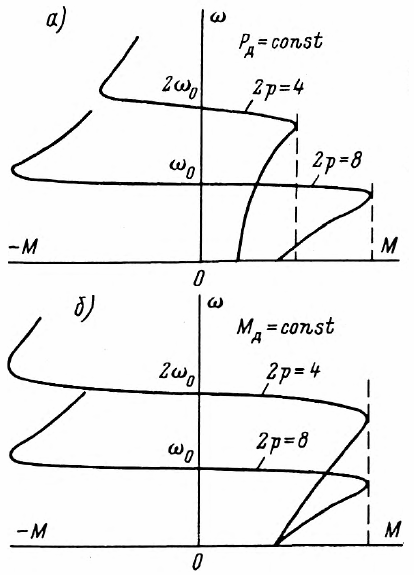
Управление скоростью и крутящим моментом постоянного тока Двигатель в основном простой, требующий изменения напряжения якоря и тока возбуждения.
Проблема в следующем: откуда взяться нужному постоянному току? источник питания поступает на судне с переменным током. электрическая система?
Традиционный метод для подъемников, кранов и лебедок используется в приводе Ward-Leonard . Здесь асинхронный двигатель с постоянной скоростью приводит в движение постоянный ток. генератор, который, в свою очередь, питает один или несколько генераторов постоянного тока. моторы.
Выходное напряжение генератора регулируется путем регулировки его малого тока возбуждения с помощью регулятора скорости. постоянный ток скорость двигателя напрямую регулируется напряжением генератора.
Очевидно, что двигатель-генератор (M-G) требует места и обслуживания.
Альтернативой является замена вращающегося комплекта M-G статическим электронным тиристорным регулятором, который питается постоянным переменным током.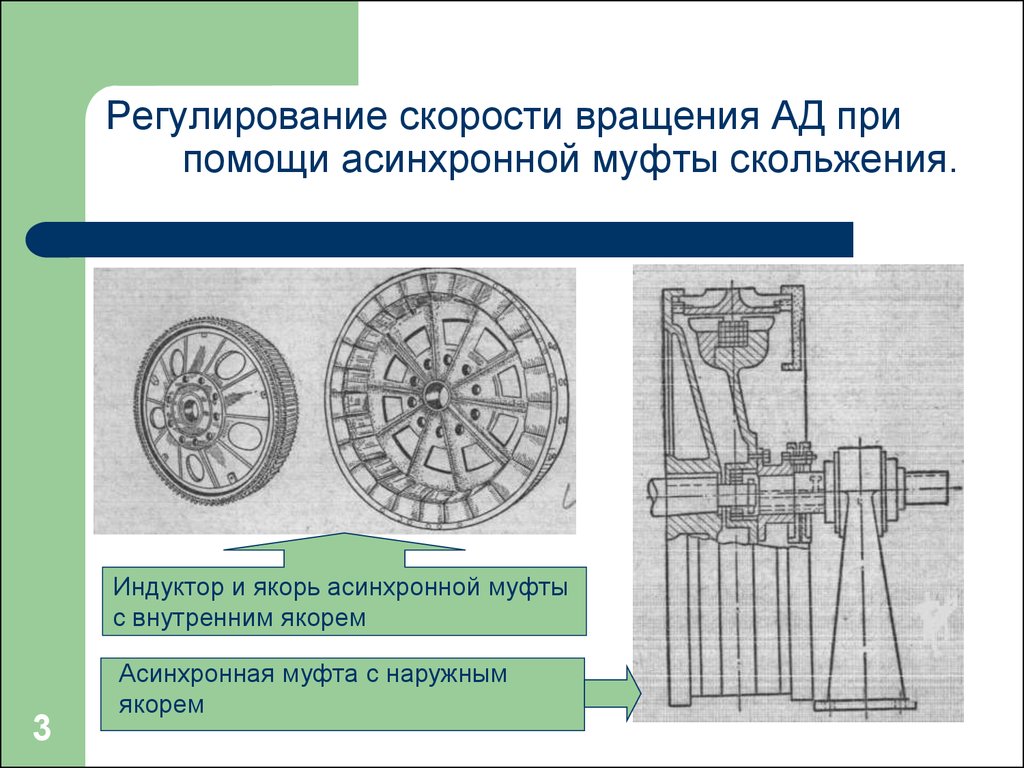 напряжение, но обеспечивает переменный постоянный ток. выходное напряжение на приводной двигатель.
напряжение, но обеспечивает переменный постоянный ток. выходное напряжение на приводной двигатель.
Хотя схема Уорда-Леонарда обеспечивает превосходный силовой привод, практические коммутаторы ограничены примерно 750 В постоянного тока. максимум, который также ограничивает верхний диапазон мощности.
Коммутаторы на постоянном токе машины также требуют повышенных требований к техническому обслуживанию.
Чтобы устранить эти проблемы, необходимо вернуться к простоте асинхронного двигателя с короткозамкнутым ротором. Однако единственный способ добиться плавного изменения выходной скорости с помощью электрического управления — это изменить частоту питания двигателя.
Статический электронный транзисторный или тиристорный (мощный) контроллер может использоваться для создания такого выходного сигнала с переменной частотой для непосредственного управления скоростью двигателя.
входной сигнал выпрямляется и сглаживается конденсатором до устойчивого постоянного тока.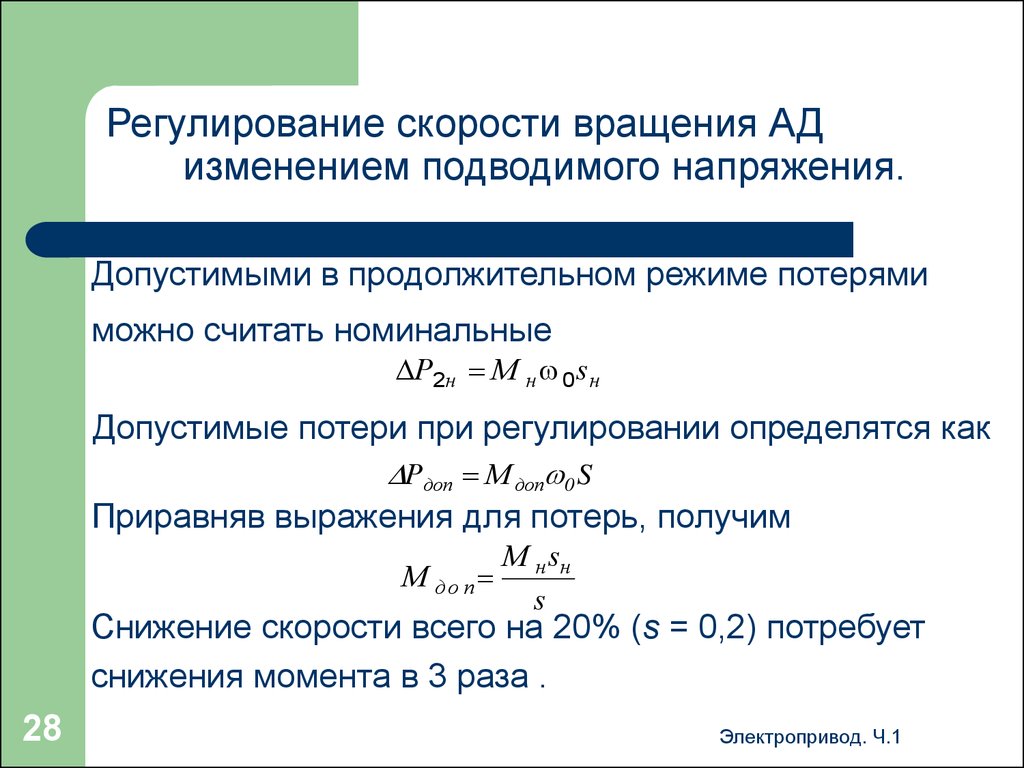 напряжение линии связи (около 600 В постоянного тока от источника переменного тока 440 В, среднеквадратичное значение).
напряжение линии связи (около 600 В постоянного тока от источника переменного тока 440 В, среднеквадратичное значение).
Постоянный ток Затем напряжение нарезается на импульсы напряжения переменной ширины, но постоянного уровня в секции инвертора, управляемой компьютером, с использованием IGBT (биполярных транзисторов с изолированным затвором). Этот процесс называется широтно-импульсной модуляцией или PWM .
Путем изменения ширины импульса и полярности постоянного тока. напряжения можно генерировать усредненное синусоидальное переменное напряжение. вывод в широком диапазоне частот.
Из-за сглаживающего эффекта индуктивности двигателя токи двигателя имеют приблизительно синусоидальную форму.
При последовательном направлении токов в три обмотки статора создается обратимое вращающееся магнитное поле с частотой, устанавливаемой ШИМ-модулятором .
Преобразователи частоты с цифровым управлением/могут быть легко объединены в сеть с другими компьютерными устройствами, т. е. программируемые логические контроллеры (ПЛК) для общего управления сложным процессом.
е. программируемые логические контроллеры (ПЛК) для общего управления сложным процессом.
Недостаток отключения больших токов таким приводом создает гармоническое напряжение обратно в сеть электропитания.
Форма волны гармонического напряжения представляет собой искаженную синусоидальную форму волны.
Такие гармонические возмущения напряжения, вызванные коммутацией тока, могут создавать помехи для другого оборудования, подключенного к энергосистеме.
прогрессирующий пробой изоляции из-за скачков высокого напряжения
мерцание освещения
неисправность слаботочных устройств, таких как электронные вычислительные машины и контрольно-измерительные цепи
Professional Tool For
Электротехнический специалист (ETO)
Лучшая покупка Штабелеры для электрика
 10010108.1000016.i0.dd0423d7F74pQy»>
10010108.1000016.i0.dd0423d7F74pQy»>Лучшее предложение / 3,73 $
Как привод переменного тока управляет скоростью асинхронного двигателя?
Для асинхронного двигателя частота вращения ротора, частота источника напряжения, число полюсов и скольжение связаны между собой следующим уравнением:
п = 120 ф 1 (1 — с) / р
Где
n: механическая скорость (об/мин)
f 1 : основная частота входного напряжения (Гц)
р: количество полюсов
s: скольжение
Анализ приведенной выше формулы показывает, что механическая скорость асинхронного двигателя является функцией трех параметров. Таким образом, изменение любого из этих параметров вызовет изменение скорости двигателя в соответствии с таблицей ниже.
| Контроль скорости | |
| Параметр | Характеристики применения |
| Количество полюсов | Дискретный вариант |
| Крупногабаритный | |
| Слип | Непрерывное изменение |
| Потери ротора | |
| Ограниченный диапазон частот | |
| Частота напряжения | Непрерывное изменение |
| Использование приводов переменного тока | |
Использование приводов переменного тока в настоящее время является наиболее эффективным методом управления скоростью асинхронных двигателей. Приводы переменного тока преобразуют напряжение постоянной частоты с постоянной амплитудой в переменное (управляемое) частотно-переменное (управляемое) амплитудное напряжение. Изменение частоты питания, подаваемой на двигатель, приводит к изменению скорости вращающегося поля, что изменяет механическую скорость машины.
Приводы переменного тока преобразуют напряжение постоянной частоты с постоянной амплитудой в переменное (управляемое) частотно-переменное (управляемое) амплитудное напряжение. Изменение частоты питания, подаваемой на двигатель, приводит к изменению скорости вращающегося поля, что изменяет механическую скорость машины.
Крутящий момент, развиваемый асинхронным двигателем, соответствует следующему уравнению:
T = k 1. f м. I 2
Без учета падения напряжения, вызванного импедансом статора, поток намагничивания равен:
φ м = k 2. В 1 / f 1
Где
T: крутящий момент на валу (Н·м)
φ m : намагничивающий поток (Вб)
I 2 : ток ротора (А) → зависит от нагрузки!
В 1 : напряжение статора (В)
k 1 e k 2 : константы → зависят от материала и конструкции машины!
Учитывая нагрузку с постоянным крутящим моментом и допуская, что ток зависит от нагрузки (следовательно, практически постоянный ток), пропорциональное изменение амплитуды и частоты напряжения, подаваемого на двигатель, приводит к постоянному потоку и, следовательно, к постоянному крутящему моменту, в то время как ток остается неизменным. Таким образом, двигатель обеспечивает непрерывную регулировку скорости и крутящего момента в зависимости от механической нагрузки. Таким образом, потери можно свести к минимуму в соответствии с условиями нагрузки, поддерживая постоянное скольжение на любой скорости для заданной нагрузки.
Таким образом, двигатель обеспечивает непрерывную регулировку скорости и крутящего момента в зависимости от механической нагрузки. Таким образом, потери можно свести к минимуму в соответствии с условиями нагрузки, поддерживая постоянное скольжение на любой скорости для заданной нагрузки.
Приведенные ниже кривые получены из приведенных выше уравнений.
Отношение V1/f1 поддерживается постоянным вплоть до базовой (номинальной) частоты двигателя. Начиная с этой частоты и выше напряжение поддерживается постоянным на своем базовом (номинальном) значении, в то время как частота, подаваемая на обмотки статора, продолжает расти, как показано далее.
Таким образом, область выше базовой частоты называется ослаблением поля, в которой поток уменьшается в результате увеличения частоты, вызывая постепенное уменьшение крутящего момента двигателя. Типичная кривая зависимости крутящего момента от скорости асинхронного двигателя с питанием от привода переменного тока показана ниже.
Получается, что крутящий момент остается постоянным до базовой частоты, а за этой точкой падает (ослабление поля). Поскольку выходной сигнал пропорционален крутящему моменту, умноженному на скорость, он линейно растет до базовой частоты, а начиная с этой точки остается постоянным. Это показано на графике рядом.
За последние годы значительно увеличилось количество приложений с переменной частотой, управляемых с помощью привода переменного тока. Это можно объяснить многочисленными преимуществами таких приложений:
- Отдельное управление – устройство управления может быть установлено удаленно в подходящем месте, оставляя только двигатель в зоне обработки – в отличие от гидравлических и механических систем с регулируемой скоростью.
- Снижение затрат – прямой пуск асинхронных двигателей от сети вызывает пики тока, которые вредят двигателю, а также другому электрическому оборудованию, подключенному к электрической системе. Привод переменного тока обеспечивает плавный пуск, что приводит к снижению затрат на техническое обслуживание.
- Повышение производительности – Промышленные системы часто имеют слишком большие размеры из-за ожидания увеличения производства в будущем. Приводы переменного тока позволяют правильно регулировать рабочую скорость в соответствии с имеющимся оборудованием и производственными потребностями.
- Energy Efficiency – глобальная эффективность энергосистемы зависит не только от двигателя, но и от системы управления. Приводы переменного тока представляют собой высокоэффективные устройства, обычно достигающие 97% и более. Асинхронные двигатели также имеют высокий КПД, достигающий 95 % и более в более крупных машинах, работающих в номинальных условиях. Когда требуется изменение скорости, выходная мощность изменяется оптимальным образом, напрямую влияя на потребление энергии и приводя к высоким уровням эффективности системы (преобразователь частоты + двигатель).
- Универсальность – Приводы переменного тока подходят для нагрузок как с переменным, так и с постоянным крутящим моментом. При нагрузках с переменным крутящим моментом (небольшой требуемый крутящий момент на низких скоростях) напряжение двигателя снижается, чтобы компенсировать снижение эффективности, обычно возникающее в результате снижения нагрузки. При нагрузках с постоянным крутящим моментом (или постоянной мощностью) повышение эффективности системы происходит за счет возможности непрерывной регулировки скорости без необходимости использования нескольких двигателей или механических систем с регулируемой скоростью (таких как шкивы и шестерни), которые вносят дополнительные потери.
- Высокое качество – точное регулирование скорости, обеспечиваемое приводами переменного тока, приводит к оптимизации процесса и повышению качества конечного продукта.
 Привод переменного тока обеспечивает плавный пуск, что приводит к снижению затрат на техническое обслуживание.
Привод переменного тока обеспечивает плавный пуск, что приводит к снижению затрат на техническое обслуживание.
Методы управления скоростью асинхронного двигателя
Из всех электрических машин асинхронный двигатель наиболее часто используется в промышленности. Более 90% двигателей, используемых в промышленности, представляют собой асинхронные двигатели с короткозамкнутым ротором из-за их прочной и не требующей обслуживания конструкции. Как правило, асинхронный двигатель работает с почти постоянной скоростью при изменении нагрузки. Но в некоторых промышленных применениях требуется регулирование скорости двигателя. Это требует наличия методов управления скоростью асинхронного двигателя.
Более 90% двигателей, используемых в промышленности, представляют собой асинхронные двигатели с короткозамкнутым ротором из-за их прочной и не требующей обслуживания конструкции. Как правило, асинхронный двигатель работает с почти постоянной скоростью при изменении нагрузки. Но в некоторых промышленных применениях требуется регулирование скорости двигателя. Это требует наличия методов управления скоростью асинхронного двигателя.
Как известно, ротор асинхронного двигателя вращается со скоростью, несколько меньшей синхронной. Фактически, скорость вращения ротора определяется скольжением. Давайте сначала посмотрим на взаимосвязь между скоростью вращения ротора и скольжением, чтобы перейти к различным методам управления скоростью асинхронного двигателя.
Если N r , N s и s — частота вращения ротора, синхронная скорость и скольжение соответственно, то согласно определению скольжения асинхронного двигателя
N r = N с (1-с)
Но N с = Синхронная скорость = 120f/P
N r = (120f/P) (1-с)
900 Из приведенного выше выражения скорости ротора, ясно, что скорость можно регулировать либо путем изменения частоты (f), количества полюсов (P), либо скольжения (s).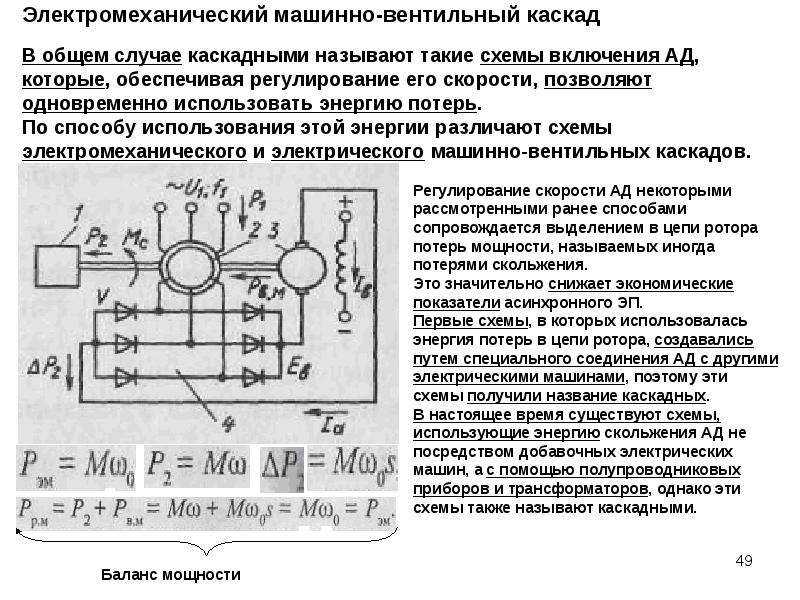
Теперь скольжение можно изменить следующими способами:
- Изменить сопротивление цепи ротора
- Изменение напряжения питания
- Подача напряжения подходящей частоты в цепь ротора
Таким образом, регулирование скорости асинхронного двигателя может осуществляться пятью различными способами:
- Управление скоростью VVVF
- Метод смены полюсов
- Контроль сопротивления цепи ротора
- Контроль напряжения статора
- Впрыск ЭДС в цепь ротора
Эти методы показаны на рисунке ниже.
Эти методы управления скоростью можно дополнительно классифицировать на основе того, осуществляется ли управление со стороны статора или со стороны ротора. Следующие методы относятся к стороне статора, так как эти методы применяются к обмотке статора:
- Метод смены полюсов
- Контроль напряжения статора
- ВВВФ Регулятор скорости
Следующие методы используются со стороны цепи ротора для управления скоростью:
- Каскадная работа асинхронного двигателя
- ЭДС Впрыск в цепь ротора
- Метод контроля сопротивления цепи ротора
Следует отметить, что управление скоростью со стороны ротора применимо только к асинхронному двигателю с контактными кольцами.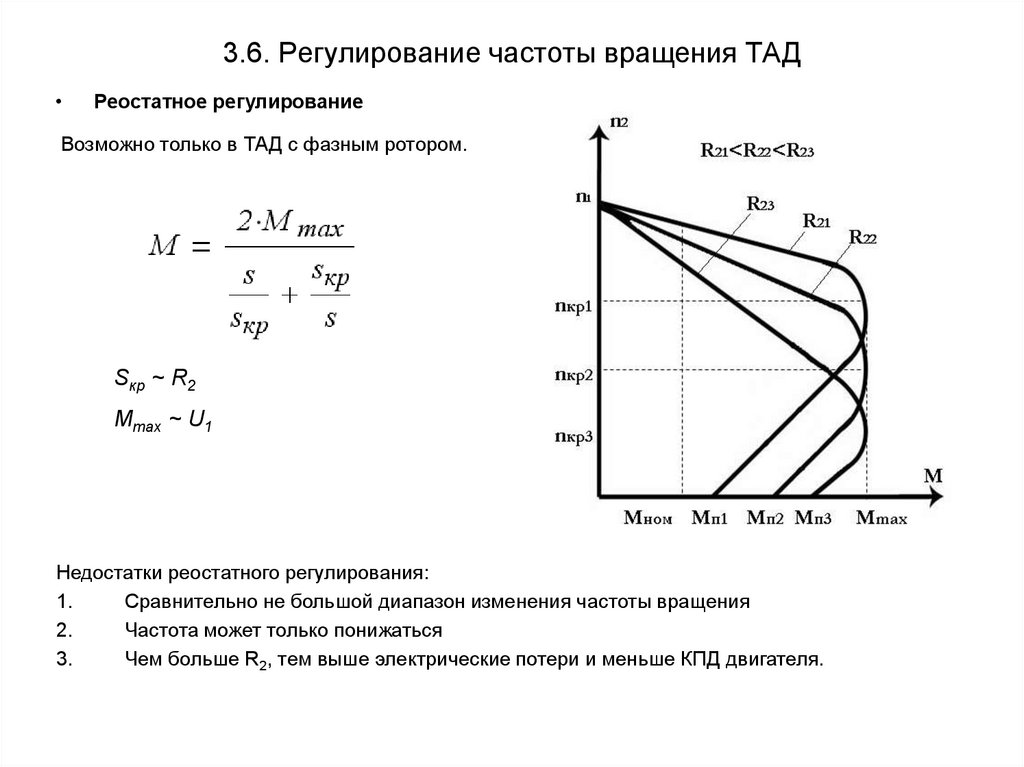
Методы управления скоростью со стороны ротора
Ниже приведены различные методы управления скоростью асинхронного двигателя со стороны ротора:
Каскадное управление асинхронным двигателем:
Этот метод также называется тандемным управлением и в настоящее время устарел. В этом методе мощность скольжения асинхронного двигателя используется для управления скоростью. Мощность скольжения в асинхронном двигателе — это мощность, рассеиваемая в обмотке ротора в виде омических потерь. Как известно, мощность воздушного зазора P г представляет собой сумму выходной механической мощности и потерь мощности в обмотке ротора при условии, что обмотка ротора закорочена. Следовательно,
P г = (1-s)P г + sP г
Первый член в правой части приведенного выше уравнения представляет собой выходную механическую мощность, а второй член называется учитываемой мощностью скольжения.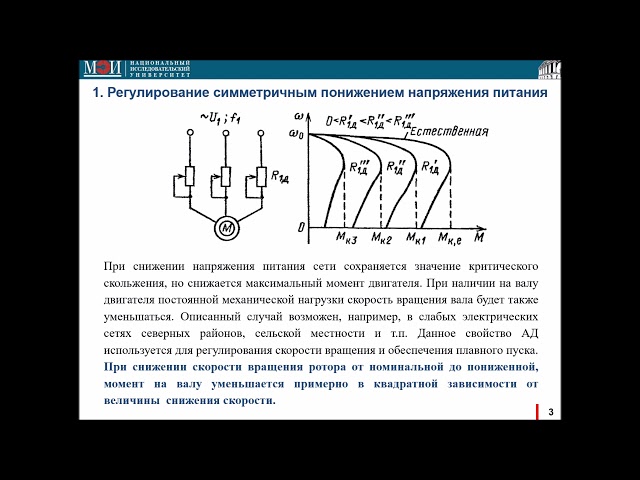 на потери в обмотке ротора. Эта мощность скольжения используется для управления скоростью при каскадной работе асинхронного двигателя.
на потери в обмотке ротора. Эта мощность скольжения используется для управления скоростью при каскадной работе асинхронного двигателя.
При регулировании скорости путем каскадного включения двух асинхронных двигателей роторы двух двигателей механически связаны. Один двигатель называется основным двигателем, а второй двигатель называется вспомогательным двигателем. Клемма статора основного двигателя подключается к сети питания, а мощность скольжения основного двигателя подается на клеммы статора вспомогательного асинхронного двигателя через токосъемное кольцо, как показано на рисунке ниже.
Таким образом, мощность скольжения основного двигателя подается на вспомогательный асинхронный двигатель с частотой f 2 = s 1 f 1 .
Предположим теперь, что P 1 , P 2 и s 1 , s 2 — количество полюсов и плашек соответственно. Тогда для главного двигателя синхронная скорость равна 120f 1 /P 1 . Следовательно, его скорость вращения будет
Следовательно, его скорость вращения будет
Н r1 = (120f 1 /P 1 ) (1-s 1 )
Аналогично для вспомогательного двигателя скорость будет
N r2 = (120f 2 /P 2 2 )
Поскольку главный двигатель и вспомогательный асинхронный двигатель механически связаны, их скорость должна быть одинаковой. Это означает, что
N R1 = N R2
(120F 1 /P 1 ) (1-S 1 ) = (120F 2 /P ) = (120F 2 80) = (120F 2 81) = (120F 2 ) = (120F 2 ) = (120F 2 ) = с 2 )
Так как скольжение s 2 вспомогательного асинхронного двигателя достаточно мало и, следовательно, им можно пренебречь по сравнению с 1. Следовательно, (1-s 2 ) ≈ 1,
⇒(120f 1 1 /P 1 ) (1-S 1 ) = (120F 2 /P 2 )
, но F 2 = S 1 F 1 , 1 F 1 , 1 F 1 , 1 F 1 . /P 1 ) (1-s 1 ) = (120f 1 s 1 /P 2 )
/P 1 ) (1-s 1 ) = (120f 1 s 1 /P 2 )
⇒s 1 = P 2 / (P 1 + P 2 )
Thus the actual speed of main motor is given as
N r1 = (120f 1 /P 1 ) (1-S 1 )
= (120F 1 / P 1 ) [1- P 2 / (P 1 + P 2 )]
= + P 2 )]]
= + P 2 )]]]
= + P 2 )]]]]
= + р 2 )]]]]] 1 + р 2 )]]]]]]. 120f 1 /(P 1 + P 2 )
Из приведенного выше выражения скорости основного асинхронного двигателя можно сказать, что скорость асинхронного двигателя при каскадной работе эквивалентна скорости однодвигательный, имеющий (P 1 + P 2 ) столбы. Поскольку в этой схеме моменты как основного, так и вспомогательного двигателей направлены в одну сторону, этот способ называется кумулятивно-каскадным.
Если чередование фаз вспомогательного двигателя изменяется путем замены любых двух проводов, он развивает крутящий момент в направлении, противоположном основному асинхронному двигателю. Эта схема называется дифференциально-каскадной работой асинхронного двигателя. По этой схеме скорость главного двигателя задается как
N r1 = 120f 1 /(P 1 – P 2 )
Из приведенного выше выражения очевидно, что дифференциальная каскадная работа возможна только в том случае, если главный и вспомогательный двигатели имеют разное число полюсов, т. е. P 1 ≠ P 2
Управление скоростью путем подачи ЭДС в цепь ротора:
В этом методе скорость асинхронного двигателя регулируется путем подачи ЭДС в цепь ротора. Частота этой введенной ЭДС должна быть на частоте скольжения на всех скоростях. Этот метод применим только для асинхронного двигателя с контактными кольцами. Следует отметить, что при введении ЭДС в ротор асинхронный двигатель становится асинхронной машиной двойного возбуждения. С помощью этого метода может быть достигнута скорость выше синхронной скорости.
Следует отметить, что при введении ЭДС в ротор асинхронный двигатель становится асинхронной машиной двойного возбуждения. С помощью этого метода может быть достигнута скорость выше синхронной скорости.
Чтобы лучше понять принцип работы и эффект введения ЭДС в цепь ротора, рассмотрим векторную диаграмму асинхронного двигателя. На рисунке ниже показана векторная диаграмма.
На рисунке а) представлена векторная диаграмма асинхронного двигателя, работающего со скольжением s, и короткозамкнутой обмоткой ротора. sE 2 — ЭДС в обмотке ротора при любом скольжении s.
Как мы знаем, крутящий момент, развиваемый двигателем по фазам, определяется как
T e = (E 2 /ω s )I 2 cosɵ 2
where E 2 = EMF generated in rotor winding at standstill condition
ωs = Synchronous speed
Предполагая, что крутящий момент нагрузки будет постоянным, затем
T E = (E 2 /ω S ) I 2 COSɵ 2 = Констант
С 2 и константы
с 2 и константы
с 2 и констант
с 2 и константы
с . постоянная для данного двигателя, I 2 cosɵ 2 должен оставаться постоянным для требования постоянного момента нагрузки. Константа I 2 cosɵ 2 показана на приведенных выше рисунках а), б) и в) нижней пунктирной горизонтальной линией.
постоянная для данного двигателя, I 2 cosɵ 2 должен оставаться постоянным для требования постоянного момента нагрузки. Константа I 2 cosɵ 2 показана на приведенных выше рисунках а), б) и в) нижней пунктирной горизонтальной линией.
На рисунке b) ЭДС E j вводится в противофазе с ЭДС покоящегося ротора E 2 . Поскольку скорость двигателя не может резко измениться из-за инерции, эффект введения ЭДС в цепь ротора заключается в уменьшении тока ротора с (sE 2 / Z 2 ) до [(sE 2 – E j ) / Z 2 ], как показано на рисунке c).
Из-за уменьшения тока ротора электромагнитный момент резко уменьшается. Поскольку требование к крутящему моменту нагрузки является постоянным, уменьшение электромагнитного крутящего момента приводит к снижению скорости двигателя. Впоследствии скольжение увеличивается до нового значения (скажем, s’), и, следовательно, ЭДС ротора s’E 2 увеличивается. Из-за этого увеличения ЭДС ротора ток ротора снова увеличивается до тех пор, пока электромагнитный момент не станет равным постоянному моменту нагрузки.
Из-за этого увеличения ЭДС ротора ток ротора снова увеличивается до тех пор, пока электромагнитный момент не станет равным постоянному моменту нагрузки.
Следовательно, можно сделать вывод, что введение ЭДС в противофазе с E 2 приводит к снижению рабочей скорости асинхронного двигателя.
Если ЭДС совпадает по фазе с ЭДС неподвижного ротора E 2 , ток ротора и, следовательно, электрический крутящий момент увеличиваются. Поскольку крутящий момент нагрузки постоянен, скорость двигателя будет увеличиваться. Таким образом, скольжение уменьшится до несколько более низкого значения (скажем, s’’). Следовательно, ЭДС ротора при скольжении s’’ будет уменьшаться, и, следовательно, ток ротора также будет уменьшаться до тех пор, пока электрический момент не уравновесит момент нагрузки.
Следовательно, можно сделать вывод, что введение ЭДС в фазе с E 2 приводит к более высокой рабочей скорости асинхронного двигателя.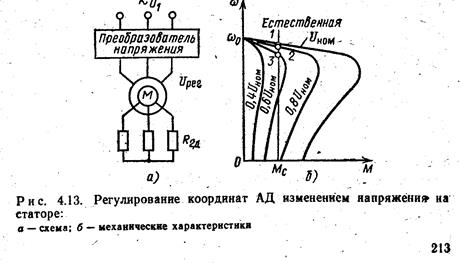
Из приведенного выше обсуждения становится ясно, что сопротивление цепи ротора увеличивается или уменьшается. Скорее это ток в цепи ротора, который увеличивается или уменьшается из-за увеличения или уменьшения чистой ЭДС цепи ротора из-за введения ЭДС в фазе или в противофазе с ЭДС неподвижного ротора E 2 .
Контроль сопротивления цепи ротора:
В этом методе сопротивление цепи ротора изменяется для регулирования скорости. Подробности см. в разделе «Контроль сопротивления цепи ротора асинхронного двигателя».
Методы управления скоростью со стороны статора
Ниже приведены различные методы управления скоростью асинхронного двигателя со стороны статора:
Управление скоростью VVVF: напряжение питания, чтобы иметь постоянный поток. Поэтому этот метод называется методом переменного напряжения и переменной частоты (VVVF). Подробнее об этом методе см. в разделе «Управление скоростью VVVF асинхронного двигателя».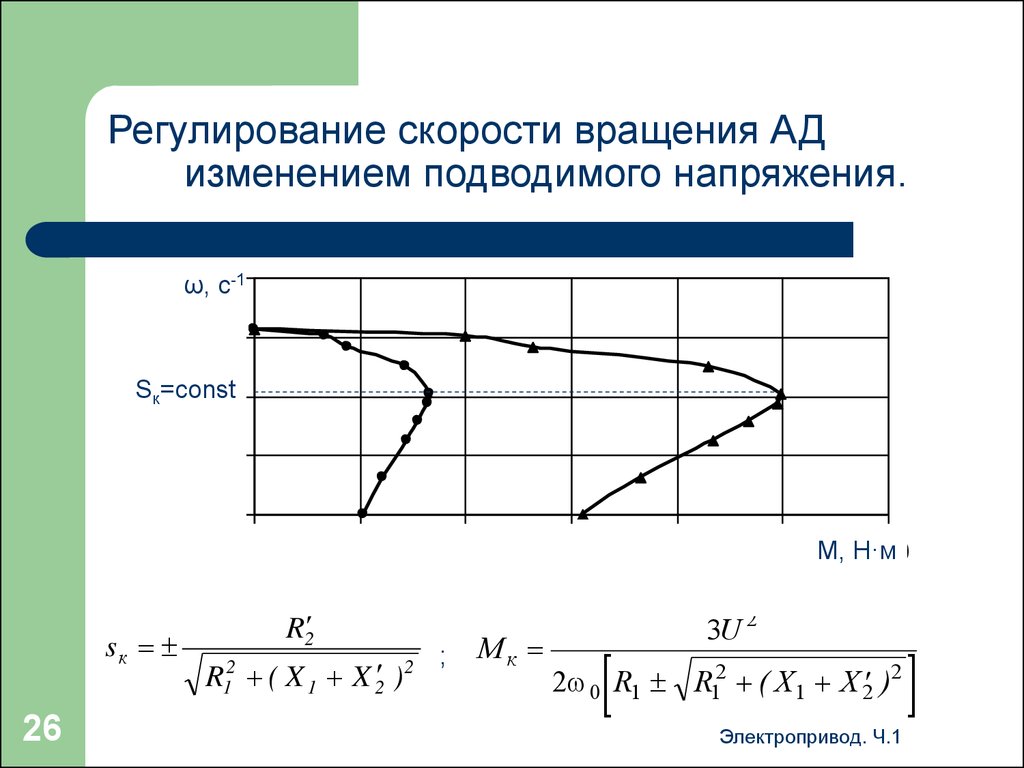
Метод смены полюсов:
В этом методе количество полюсов асинхронного двигателя изменяется путем изменения соединения обмотки статора. Этот метод уже обсуждался в предыдущем посте, и вы можете прочитать здесь, в разделе «Метод смены полюсов».
Управление напряжением статора:
Управление скоростью асинхронного двигателя осуществляется путем управления напряжением на клеммах статора. Этот метод полезен для нагрузок, требующих меньшего пускового крутящего момента, но требуемый крутящий момент увеличивается с увеличением нагрузки. Подробнее об этом методе см. в разделе «Управление напряжением статора асинхронного двигателя».
Управление скоростью однофазного асинхронного двигателя
Представление с диаграммами и изображениями
Управление скоростью однофазного асинхронного двигателя
Введение:
Асинхронный или синхронный двигатель представляет собой тип переменного тока двигатель, в котором мощность подается на ротор с помощью электромагнитной индукции. Электродвигатель вращается из-за магнитной силы, действующей между неподвижным электромагнитом, называемым статором, и вращающимся электромагнитом, называемым ротором. В асинхронном двигателе, напротив, ток в роторе индуцируется бесконтактно магнитным полем статора за счет электромагнитной индукции.
Электродвигатель вращается из-за магнитной силы, действующей между неподвижным электромагнитом, называемым статором, и вращающимся электромагнитом, называемым ротором. В асинхронном двигателе, напротив, ток в роторе индуцируется бесконтактно магнитным полем статора за счет электромагнитной индукции.
Скорость асинхронного двигателя зависит от его напряжения на клеммах и рабочей частоты. Рабочая частота асинхронного двигателя изменяется с помощью ШИМ. В этом проекте выходная частота изменяется за счет включения тиристора. Если управлять последовательностью включения тиристора, то можно получить различные частоты.
Наша проектная работа (устройство) представляет собой преобразователь частоты прямого действия, который преобразует мощность переменного тока одной частоты в мощность переменного тока другой частоты путем преобразования переменного тока в переменный без промежуточного звена преобразования.
Мы знаем, что скорость асинхронного двигателя зависит от напряжения и частоты. При изменении напряжения и частоты изменяется скорость асинхронного двигателя.
При изменении напряжения и частоты изменяется скорость асинхронного двигателя.
В проектной работе напряжение и частота изменяются и контролируются, затем контролируется скорость асинхронного двигателя.
Здесь, в первой главе, обсуждаются теоретические основы и компоненты схемы.
Здесь, во второй главе, обсудите некоторые компоненты, необходимые для формирования этой схемы.
В третьей главе обсудите блок питания. Это необходимо для многих ИС. Здесь используется блок питания 12 вольт.
В четвертой главе обсудите микросхемы, используемые в схеме.
В пятой главе обсуждается принципиальная схема, схема работы и дизайн изготовления.
Цели данной проектной работы:
1) Познакомить с некоторыми часто используемыми электронными компонентами.
2) Генерация пускового импульса.
3) Управление скоростью асинхронного двигателя с помощью напряжения и частоты.
4) Для повышения производительности.
5) Для снижения затрат на привод.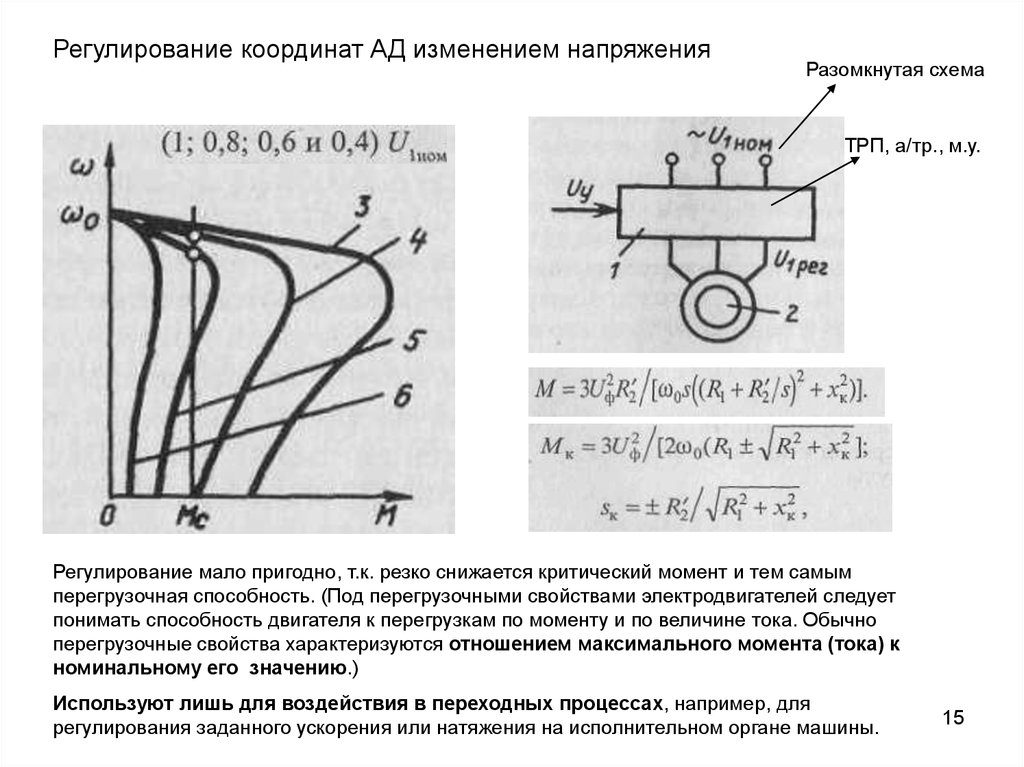
Некоторые виды проекта приведены ниже:
Рис: 1.1 некоторые виды проекта.
Теперь наша первая цель — контролировать угол открытия, чтобы мы могли контролировать напряжение нагрузки. По углу стрельбы –? входное и требуемое напряжение нагрузки показаны на рис. 1.2
Рис. 1.2 Форма напряжения питания и напряжения нагрузки для нагрузки
Приложения:
Контроллер двигателя представляет собой устройство или группу устройств, которые служат для управления определенным заранее образом производительность электродвигателя. В последние годы многие заводы и фабрики используют это устройство, некоторые из них приведены ниже:
1. На канализационной станции сточные воды обычно текут по канализационным трубам под действием силы тяжести в мокрый колодец.
2. Воздушный поток можно регулировать с помощью заслонки, ограничивающей поток, но более эффективно регулировать воздушный поток, регулируя скорость двигателя.
3. Это устройство используется для отключения центрального кондиционирования воздуха (обогрева или охлаждения) в неиспользуемом помещении или для регулирования температуры в каждой комнате и климат-контроля.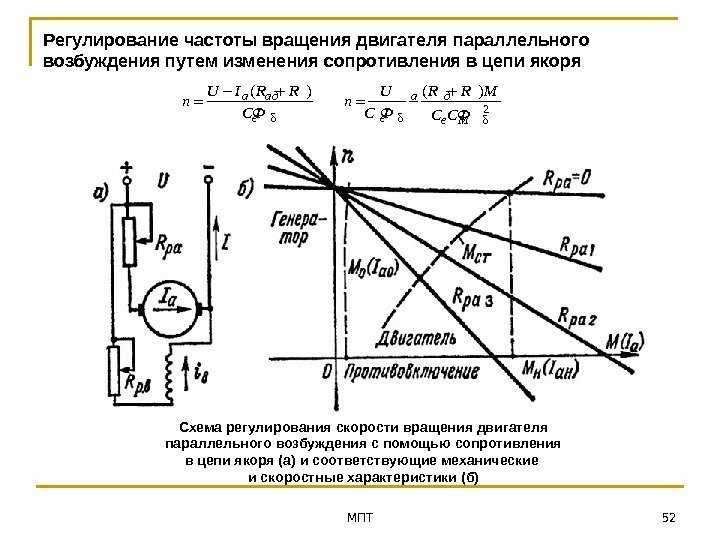
4. В дровяной печи или аналогичном устройстве это обычно ручка на вентиляционном канале, как в системе кондиционирования воздуха.
5. Судовые движители.
6. Приводы цементных мельниц.
7. Приводы прокатных станов.
8. Бумагоделательные машины.
9. Конвейерная лента.
10. Водяная установка.
ТЕОРЕТИЧЕСКАЯ ОСНОВА
Асинхронный или синхронный двигатель представляет собой тип двигателя переменного тока, в котором питание подается на ротор посредством электромагнитной индукции. Электродвигатель вращается из-за магнитной силы, действующей между неподвижным электромагнитом, называемым статором, и вращающимся электромагнитом, называемым ротором. Различные типы электродвигателей различаются по способу подачи электрического тока на движущийся ротор. В двигателе постоянного тока и двигателе переменного тока с контактными кольцами ток подается на ротор непосредственно через скользящие электрические контакты, называемые комментаторами и контактными кольцами.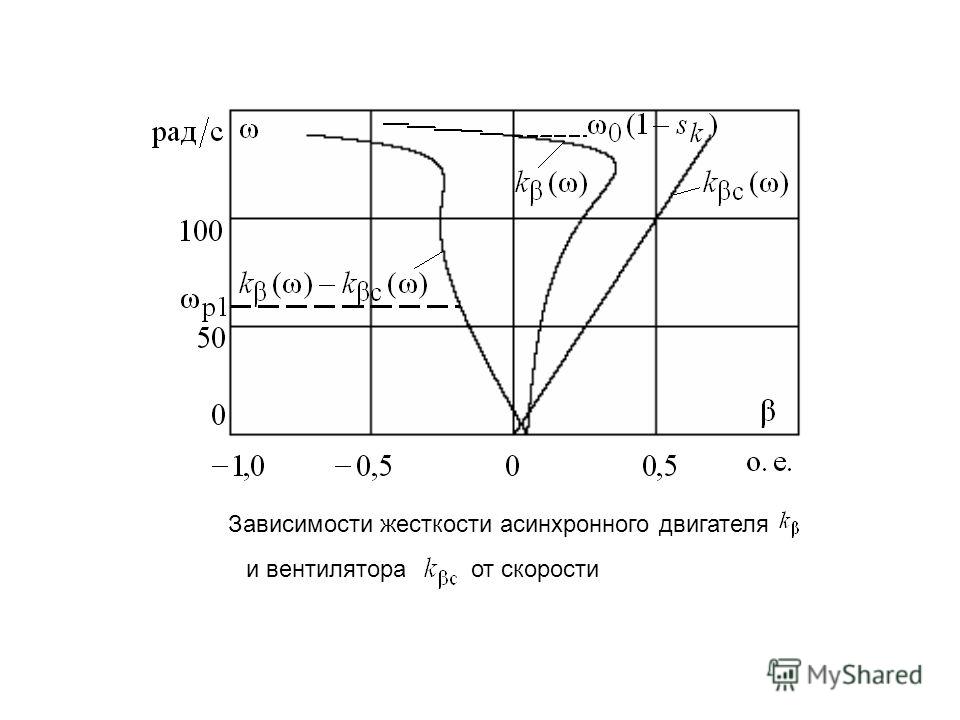 В асинхронном двигателе, напротив, ток в роторе индуцируется бесконтактно магнитным полем статора за счет электромагнитной индукции.
В асинхронном двигателе, напротив, ток в роторе индуцируется бесконтактно магнитным полем статора за счет электромагнитной индукции.
Асинхронный двигатель иногда называют вращающимся трансформатором, потому что статор (неподвижная часть) является первичной стороной трансформатора, а ротор (вращающаяся часть) — вторичной стороной. В отличие от обычного трансформатора, который изменяет ток, используя изменяющийся во времени поток, асинхронные двигатели используют вращающиеся магнитные поля для преобразования напряжения. Ток на первичной стороне создает электромагнитное поле, которое взаимодействует с электромагнитным полем вторичной стороны, создавая результирующий крутящий момент, тем самым преобразуя электрическую энергию в механическую. Широко используются асинхронные двигатели, особенно многофазные асинхронные двигатели, которые часто используются в промышленных приводах.
Рис. 2.2 Кривая момент-скорость однофазного асинхронного двигателя.
Асинхронные двигатели в настоящее время являются предпочтительным выбором для промышленных двигателей из-за их прочной конструкции, отсутствия щеток и, благодаря современной силовой электронике, возможности управления скоростью двигателя.
Принцип работы и сравнение с синхронными двигателями:
Основное различие между асинхронным двигателем и синхронным двигателем переменного тока с ротором с постоянными магнитами заключается в том, что в последнем вращающееся магнитное поле статора создает электромагнитный момент магнитное поле ротора заставляет его двигаться (около вала) и создается установившееся вращение ротора. Он называется синхронным, потому что в установившемся режиме скорость ротора такая же, как скорость вращающегося магнитного поля в статоре. Напротив, асинхронный двигатель не имеет постоянных магнитов на роторе; вместо этого в роторе индуцируется ток. Для этого обмотки статора располагаются вокруг ротора таким образом, что при подаче питания от многофазного источника питания они создают вращающееся магнитное поле, проходящее мимо ротора. Эта изменяющаяся картина магнитного поля индуцирует ток в проводниках ротора. Этот ток взаимодействует с вращающимся магнитным полем, создаваемым статором, и вызывает вращательное движение ротора.
Однако для индуцирования этих токов скорость физического ротора должна быть меньше скорости вращения магнитного поля в статоре (синхронная частота n с ), иначе магнитное поле не будет двигаться относительно проводники ротора и токи не индуцируются. Если по какой-то причине это происходит, ротор обычно немного замедляется до тех пор, пока ток не индуцируется повторно, а затем ротор продолжает работать, как и раньше. Эта разница между скоростью вращения ротора и скоростью вращения магнитного поля в статоре называется скольжением. Это меньше единицы и представляет собой отношение между относительными скоростями магнитного поля с точки зрения ротора (скорость скольжения) к скорости вращения поля статора. Из-за этого асинхронный двигатель иногда называют асинхронной машиной.
Однофазный:
В однофазном асинхронном двигателе необходимо предусмотреть пусковую цепь для запуска вращения ротора. Если этого не сделать, вращение можно запустить, слегка повернув ротор вручную. Однофазный асинхронный двигатель может вращаться в любом направлении, и только пусковая цепь определяет направление вращения.
Однофазный асинхронный двигатель может вращаться в любом направлении, и только пусковая цепь определяет направление вращения.
Для небольших двигателей мощностью несколько ватт начальное вращение осуществляется с помощью одного или двух отдельных витков толстой медной проволоки вокруг одного угла полюса. Ток, индуцируемый в одном витке, не совпадает по фазе с током питания и, таким образом, вызывает противофазную составляющую в магнитном поле, которая придает полю достаточный вращательный характер для запуска двигателя. Эти полюса известны как заштрихованные полюса. Пусковой крутящий момент очень низок, и КПД также снижается. Такие двигатели с расщепленными полюсами обычно используются в маломощных устройствах с низким или нулевым пусковым моментом, таких как настольные вентиляторы и проигрыватели.
Большие двигатели снабжены второй обмоткой статора, на которую подается противофазный ток для создания вращающегося магнитного поля. Противофазный ток может быть получен за счет питания обмотки через конденсатор или от обмотки, имеющей значения индуктивности и сопротивления, отличные от основной обмотки.
В некоторых конструкциях вторая обмотка отключается, как только двигатель набирает скорость, обычно либо с помощью выключателя, приводимого в действие центробежной силой, действующей на грузы на валу двигателя, либо с помощью тиристоров с положительным температурным коэффициентом, которые через несколько секунд работы, нагревается и увеличивает свое сопротивление до большого значения, тем самым уменьшая ток через вторую обмотку до незначительного уровня. В других конструкциях вторая обмотка постоянно находится под напряжением во время работы, что улучшает крутящий момент.
Кривая крутящего момента 4 различных синхронных электродвигателя:
A) Однофазный двигатель.
B) Одиночные многофазные двигатели с короткозамкнутым ротором.
C) Одиночные многофазные двигатели с короткозамкнутым ротором глубоко.
D) Многофазные двигатели с двойной короткозамкнутой клеткой.
Формула двигателя:
Расчет скорости двигателя:
Асинхронный двигатель с короткозамкнутым ротором представляет собой устройство с постоянной скоростью. Он не может работать в течение длительного времени на скоростях ниже тех, которые указаны на паспортной табличке, без опасности перегорания.
Он не может работать в течение длительного времени на скоростях ниже тех, которые указаны на паспортной табличке, без опасности перегорания.
To calculate the speed of an induction motor , apply this formula:
S pry = 120 x F
P
S pry = синхронные обороты в минуту.
120 = постоянная
F = частота питания (в циклах/с)
P = количество полюсов обмотки двигателя
Пример: Какова синхронность двигателя с 4 полюсами, подключенного к источнику питания с частотой 60 Гц?
S rpm = 120 x F
P
S rpm = 120 x 60
4
S rpm = 7200
4
S об/мин = 1800 об/мин
Расчет лошадиных сил:
Электрическая мощность измеряется в лошадиных силах или ваттах. Лошадиная сила — это единица мощности, равная 746 ваттам или 33 0000 фунт-футов в минуту (550 фунт-футов в секунду). Ватт — это единица измерения, равная мощности, производимой током в 1 ампер при разности потенциалов в 1 вольт. Это 1/746 от 1 лошадиной силы. Ватт является базовой единицей электрической мощности. Мощность двигателя измеряется в лошадиных силах и ваттах. Лошадиная сила используется для измерения энергии, производимой электродвигателем при выполнении работы.
Лошадиная сила — это единица мощности, равная 746 ваттам или 33 0000 фунт-футов в минуту (550 фунт-футов в секунду). Ватт — это единица измерения, равная мощности, производимой током в 1 ампер при разности потенциалов в 1 вольт. Это 1/746 от 1 лошадиной силы. Ватт является базовой единицей электрической мощности. Мощность двигателя измеряется в лошадиных силах и ваттах. Лошадиная сила используется для измерения энергии, производимой электродвигателем при выполнении работы.
Чтобы рассчитать мощность двигателя, когда известны ток, КПД и напряжение, используйте следующую формулу:
л.с. = V x I x Eff напряжение
I = ток (ампер)
Эфф. = КПД
Пример: Какова мощность двигателя 230 В, потребляющего 4 ампера и имеющего КПД 82%?
л.с. = V x I x КПД
746
л.с. = 230 x 4 x 0,82
746
л.с. = 754,4
746
л.с. = 1 л.с.
| Мощность Формулы | ||||
| Найти | Использовать формулу | Пример | ||
| Дано | Найти | Раствор | ||
| HP | л. с. = I X E X Эфф. с. = I X E X Эфф.746 | 240 В, 20 А, КПД 85 %. | л.с. | л.с. = 240 В x 20 А x 85 % 746 л.с.=5,5 |
| я | I = 746 л.с. E X Eff x PF | 10 л.с., 240 В, Эффективность 90%, эффективность 88% | я | I = 10 л.с. x 746 240 В х 90 % х 88 % I = 39 А |
Чтобы рассчитать мощность двигателя, когда известны скорость и крутящий момент, используйте следующую формулу:
л.с. = об/мин x T(крутящий момент) составляет мощность двигателя 1725 об/мин с FLT 3,1 фунт-фут?
л.с. = об / мин X T
5252
HP = 1725 x 3,1
5252
HP = 5347,5
5252
HP = 1,0003
5252
HP = 1,0003
0002 2.2 Сопротивление:
Сопротивление ограничивает протекание электрического тока, например, резистор включается последовательно со светодиодом (LED) для ограничения тока, проходящего через светодиод.
Рис. 2.3 Символ сопротивления
Поток заряда через любой материал сталкивается с противодействующей силой, во многом похожей на механическое трение. Это сопротивление из-за столкновений между электронами и другими атомами в материале, которое преобразует электрическую энергию в другую форму энергии, такую как тепло, называется сопротивлением материала. Единицей измерения сопротивления является ом, для которого используется символ ?, заглавная греческая буква омега.
Прочность любого материала с одинаковой площадью поперечного сечения определяется следующими четырьмя факторами:
- Материал
- Длина
- Площадь поперечного сечения
- Температура
Выбранный материал с его уникальной молекулярной структурой будет по-разному реагировать на давление, чтобы установить ток через его ядро. Проводники, допускающие большой поток заряда при небольшом внешнем давлении, будут иметь низкий уровень сопротивления, в то время как изоляторы будут иметь высокие характеристики сопротивления. Сопротивление прямо пропорционально длине и обратно пропорционально площади.
Сопротивление прямо пропорционально длине и обратно пропорционально площади.
По мере повышения температуры большинства проводников повышенное движение частиц внутри молекулярной структуры затрудняет прохождение «свободных» носителей, и уровень сопротивления возрастает.
При фиксированной температуре 20°C (комнатная температура) сопротивление связано с тремя другими факторами соотношением
R=
Где, проводник
A=Площадь проводника
Значения сопротивления обычно отображаются цветными полосами. Каждый цвет представляет число, как в таблице.
Большинство сопротивлений имеет 4 полосы:
· Первая полоса соответствует первой цифре.
· Вторая полоса соответствует второй цифре.
· Третья полоса указывает количество нулей.
· Четвертая полоса используется для отображения допуска (точности) сопротивления.
Емкость:
Емкость – это устройство, накапливающее энергию в электрическом поле, создаваемом между парой проводников, на которых размещены электрические заряды одинаковой величины, но противоположного знака. Конденсатор иногда называют более старым термином «конденсатор».
Конденсатор иногда называют более старым термином «конденсатор».
Рис: 2.4 Обозначение емкости
Назначение: Емкость накапливает электрический заряд. Они используются с резисторами в цепях синхронизации, потому что конденсатору требуется время, чтобы заполниться зарядом. Они используются для сглаживания переменных источников постоянного тока, действуя как резервуар заряда. Они также используются в схемах фильтров, потому что конденсаторы легко пропускают переменные (изменяющиеся) сигналы, но блокируют постоянные (постоянные) сигналы.
Это мера способности емкостей накапливать заряд. Большой означает, что больше заряда может быть сохранено. Емкость измеряется в фарадах, обозначение F.
Типы емкости: Как и сопротивления, все емкости могут быть включены в один из двух основных разделов: фиксированные или переменные. Изогнутая линия представляет собой пластину, которая обычно связана с точкой с более низким потенциалом.
Фиксированная емкость: Доступны многие типы фиксированной емкости.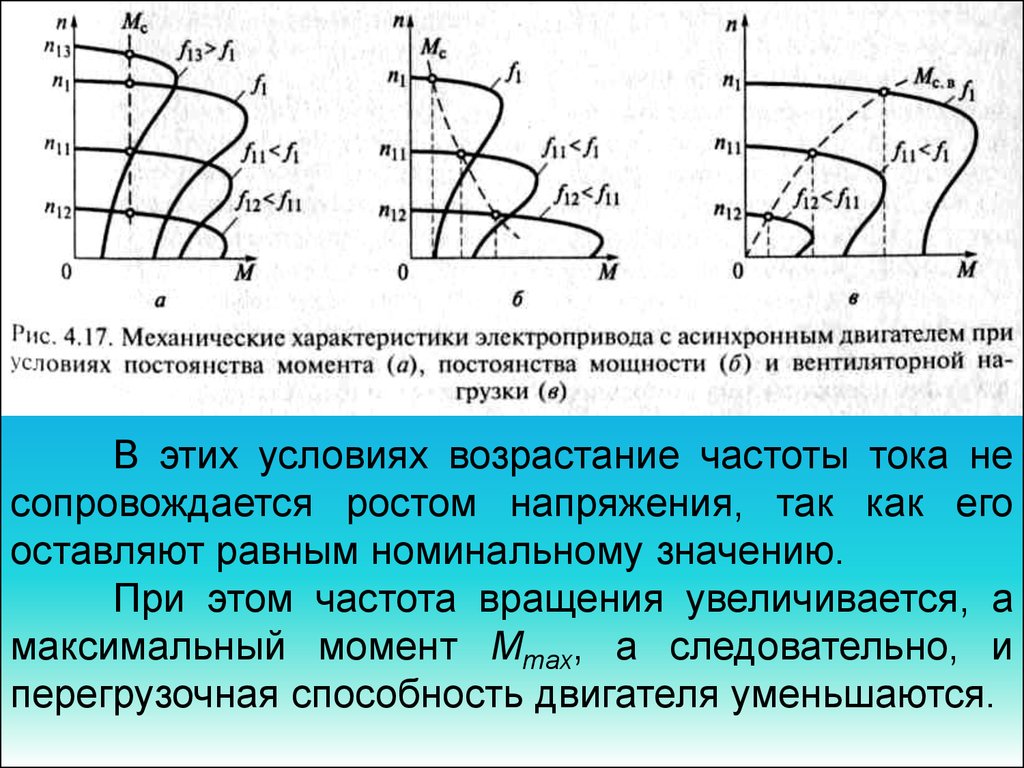 Одними из наиболее распространенных являются слюдяные, керамические, электролитические, танталовые и полиэфирные пленочные конденсаторы. Типичный плоский слюдяной конденсатор состоит в основном из листов слюды, разделенных листами металлической фольги. Пластины соединены с двумя электродами. Общая площадь равна площади одного листа, умноженной на количество диэлектрических листов. Вся система заключена в пластиковый изоляционный материал для двух центральных блоков. Слюдяные конденсаторы демонстрируют отличные характеристики при перепадах температуры и высоких напряжениях. Его ток утечки также очень мал. Слюдяные конденсаторы обычно имеют емкость от нескольких микрофарад до 0,2 мкФ при напряжении 100 В и более.
Одними из наиболее распространенных являются слюдяные, керамические, электролитические, танталовые и полиэфирные пленочные конденсаторы. Типичный плоский слюдяной конденсатор состоит в основном из листов слюды, разделенных листами металлической фольги. Пластины соединены с двумя электродами. Общая площадь равна площади одного листа, умноженной на количество диэлектрических листов. Вся система заключена в пластиковый изоляционный материал для двух центральных блоков. Слюдяные конденсаторы демонстрируют отличные характеристики при перепадах температуры и высоких напряжениях. Его ток утечки также очень мал. Слюдяные конденсаторы обычно имеют емкость от нескольких микрофарад до 0,2 мкФ при напряжении 100 В и более.
Электролитический конденсатор чаще всего используется в ситуациях, когда требуются емкости порядка от одного до нескольких тысяч микрофарад. Они предназначены в первую очередь для использования в сетях, где к конденсатору будет приложено только постоянное напряжение, потому что они имеют хорошие изоляционные характеристики между пластинами в одном направлении, но приобретают характеристики проводника в другом направлении. Доступны электролитические конденсаторы, которые можно использовать в цепи переменного тока и в случае, когда полярность постоянного напряжения на конденсаторе меняется на короткий период времени.
Доступны электролитические конденсаторы, которые можно использовать в цепи переменного тока и в случае, когда полярность постоянного напряжения на конденсаторе меняется на короткий период времени.
Переменная емкость: Диэлектриком для каждой емкости является воздух. Емкость изменяется путем поворота вала на одном конце для изменения общей площади подвижной и неподвижной пластин. Чем больше общая площадь, тем больше емкость, определяемая уравнением. Емкость подстроечного конденсатора изменяется вращением винта, который изменяет расстояние между пластинами и тем самым емкость.
Появится цифровой измеритель емкости. Просто поместите конденсатор между зажимами, соблюдая полярность, и прибор отобразит уровень емкости. Лучшей проверкой конденсатора является использование измерителя, предназначенного для выполнения необходимых тестов.
Емкость, включенная последовательно и параллельно:
Емкости, как и сопротивления, могут быть включены последовательно и параллельно.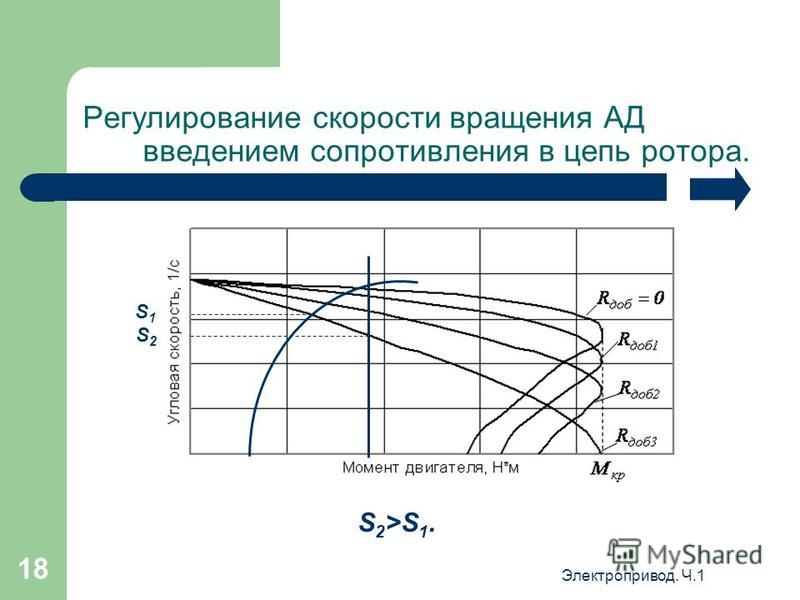 Уровни увеличения емкости можно получить, подключив конденсаторы параллельно, а уровни уменьшения можно получить, подключив конденсаторы последовательно.
Уровни увеличения емкости можно получить, подключив конденсаторы параллельно, а уровни уменьшения можно получить, подключив конденсаторы последовательно.
Энергия, накопленная емкостью:
Идеальная емкость не рассеивает подводимой к ней энергии. Он запасает энергию в виде электрического поля между проводящими поверхностями. График напряжения, тока и мощности конденсатора во время фазы зарядки. Кривую мощности можно получить, найдя произведение напряжения и тока в выбранные моменты времени и соединив полученные точки. Накопленная энергия представлена заштрихованной областью под кривой мощности.
Диод:
Диод — это электронный компонент с двумя выводами, проводящий электрический ток только в одном направлении. Наиболее распространенная функция диода — пропускать электрический ток в одном направлении (так называемое прямое направление диода). , при этом блокируя ток в обратном направлении (обратное направление).
Рис. 2.5 Символ диода
Однако диоды могут иметь более сложное поведение, чем это простое действие включения-выключения. Это связано с их сложными нелинейными электрическими характеристиками, которые можно настроить, изменив конструкцию их PN-перехода. Они используются в диодах специального назначения, которые выполняют множество различных функций. Например, для регулирования 9 используются специализированные диоды.0003
Напряжение (стабилитроны), для электронной настройки радио- и телеприемников (варакторные диоды), для генерации радиочастотных колебаний (туннельные диоды) и для получения света (светоизлучающие диоды). Туннельные диоды обладают отрицательным сопротивлением, что делает их полезными в некоторых типах схем.
Современный полупроводниковый диод состоит из кристалла полупроводника, такого как кремний, в который добавлены примеси для создания области на одной стороне, содержащей носители отрицательного заряда (электроны), называемой полупроводником n-типа, и области на другой стороне который содержит носители положительного заряда (дырки), называется полупроводником р-типа. Клеммы диода присоединены к каждой из этих областей. Граница внутри кристалла между этими двумя областями, называемая PN-переходом, — это место, где происходит действие диода. Кристалл проводит ток электронов в направлении от стороны N-типа (называемой катодом) к стороне P-типа (называемой анодом), но не в противоположном направлении; то есть обычный ток течет от анода к катоду (в отличие от потока электронов, поскольку электроны имеют отрицательный заряд).
Полупроводниковый диод другого типа, диод Шоттки, формируется за счет контакта между металлом и полупроводником, а не за счет p-n перехода.
Вольт-амперная характеристика:
Если на диод подается внешнее напряжение с той же полярностью, что и встроенный потенциал, зона обеднения продолжает действовать как изолятор, предотвращая любое значительное протекание электрического тока (если только электроны /дырочные пары в переходе активно создаются, например, светом (см. фотодиод). Это явление обратного смещения.
Однако, если полярность внешнего напряжения противоположна встроенному потенциалу, рекомбинация может снова начаться, что приведет к значительному электрическому току через p-n переход (т. е. значительное количество электронов и дырок рекомбинирует в переходе). Для кремниевых диодов встроенный потенциал составляет примерно 0,7 В (0,3 В для германиевых и 0,2 В для Скоттки). Таким образом, если через диод пропустить внешний ток, на диоде будет выработано около 0,7 В, так что область, легированная P, положительна по отношению к области, легированной N, и говорят, что диод «включен», поскольку он имеет прямое смещение.
При очень большом обратном смещении, превышающем пиковое обратное напряжение или PIV, происходит процесс, называемый обратным пробоем, который вызывает значительное увеличение тока (т. е. большое количество электронов и дырок создается на p-n переходе и удаляется от него) обычно это приводит к необратимому повреждению устройства.
Ниже представлена вольт-амперная характеристика диода:
Рис. 2.6 Вольт-амперная характеристика диода
2.5 Транзистор:
Транзистор может управлять своим выходом пропорционально входному сигналу; то есть он может действовать как усилитель. В качестве альтернативы транзистор можно использовать для включения или выключения тока в цепи в качестве переключателя с электрическим управлением, где величина тока определяется другими элементами цепи. Существенная полезность транзистора заключается в его способности использовать небольшой сигнал, подаваемый между одной парой его выводов, для управления гораздо большим сигналом на другой паре выводов. Это свойство называется усилением.
Рис. 2.7 Символ транзистора
Два типа транзисторов имеют небольшие различия в том, как они используются в схеме. У биполярного транзистора выводы обозначены базой, коллектором и эмиттером. Небольшой ток на клемме базы (т. е. текущий от базы к эмиттеру) может контролировать или коммутировать гораздо больший ток между клеммами коллектора и эмиттера. Для полевого транзистора клеммы помечены как затвор, исток и сток, а напряжение на затворе может управлять током между истоком и стоком.
Изображение справа представляет типичный биполярный транзистор в схеме. Заряд будет течь между терминалами эмиттера и коллектора в зависимости от тока в базе. Поскольку внутренние соединения базы и эмиттера ведут себя как полупроводниковый диод, между базой и эмиттером возникает падение напряжения, пока существует базовый ток. Величина этого напряжения зависит от материала, из которого изготовлен транзистор, и обозначается как V BE .
Транзистор в качестве переключателя
Транзисторы обычно используются в качестве электронных переключателей, как для мощных приложений, таких как импульсные источники питания, так и для приложений с низким энергопотреблением, таких как логические элементы.
В транзисторной схеме с заземленным эмиттером, такой как показанная схема выключателя света, по мере того, как напряжение базы повышается, ток базы и коллектора возрастает экспоненциально, а напряжение коллектора падает из-за резистора нагрузки коллектора. Соответствующие уравнения:
В RC = I CE × R C , напряжение на нагрузке (лампа с сопротивлением R C )
В RC + V CE = V CC , напряжение питания отображается как 6В
3
8 CE может упасть до 0 (идеальный замкнутый переключатель), тогда Ic не может подняться выше, чем V CC / R C , даже при более высоком базовом напряжении и токе. В этом случае говорят, что транзистор насыщается. Следовательно, значения входного напряжения могут быть выбраны так, что выход либо полностью выключен, либо полностью включен. Транзистор действует как переключатель, и этот тип операции распространен в цифровых схемах, где важны только значения «включено» и «выключено».
Усилитель с общим эмиттером разработан таким образом, что небольшое изменение напряжения в (В в ) изменяет небольшой ток через базу транзистора, а усиление тока транзистора в сочетании со свойствами схемы означает, что небольшие колебания в V в производит большие изменения в V из .
Схема усилителя с общим эмиттером.
Операционный усилитель:
Операционный усилитель («операционный усилитель») представляет собой электронный усилитель напряжения с высоким коэффициентом усиления и связью по постоянному току с дифференциальным входом и, как правило, несимметричным выходом. Операционный усилитель создает выходное напряжение, которое обычно в сотни тысяч раз превышает разность напряжений между его входными клеммами.
A Signetics — операционный усилитель, один из самых успешных операционных усилителей.
Операционные усилители являются важными строительными блоками для широкого спектра электронных схем. Они возникли в аналоговых компьютерах, где использовались во многих линейных, нелинейных и частотно-зависимых схемах. Их популярность в схемотехнике во многом связана с тем, что характеристики конечных элементов (например, их коэффициент усиления) задаются внешними компонентами и мало зависят от изменений температуры и производственных вариаций самого операционного усилителя.
Операция:
Дифференциальные входы усилителя состоят из входа и входа, и в идеале операционный усилитель усиливает только разницу напряжений между ними, которая называется дифференциальным входным напряжением. Выходное напряжение операционного усилителя определяется уравнением
Где напряжение на неинвертирующем выводе есть напряжение на инвертирующем выводе, а A OL — коэффициент усиления усилителя без обратной связи ( термин «разомкнутый цикл» относится к отсутствию обратной связи от выхода к входу).
Обычно очень большой коэффициент усиления операционного усилителя контролируется отрицательной обратной связью, которая в значительной степени определяет величину его выходного («замкнутого контура») усиления по напряжению в усилителях или требуемую передаточную функцию (в аналоговых компьютерах). Без отрицательной обратной связи и, возможно, с положительной обратной связью для регенерации операционный усилитель действует как компаратор. Высокое входное сопротивление на входных клеммах и низкое выходное сопротивление на выходных клеммах являются важными типичными характеристиками.
При отсутствии отрицательной обратной связи операционный усилитель действует как компаратор. Инвертирующий вход удерживается на земле (0 В) резистором, поэтому, если V в , приложенное к неинвертирующему входу, положительное, выход будет максимально положительным, а если V в отрицательный, выход будет максимально отрицательным. Поскольку обратной связи между выходом и входом нет, это схема с разомкнутым контуром. Коэффициент усиления схемы равен G OL операционного усилителя.
Добавление отрицательной обратной связи через делитель напряжения R f ,R g уменьшает усиление. Равновесие установится, когда V из будет достаточно, чтобы дотянуться и «подтянуть» инвертирующий вход к тому же напряжению, что и V в . В качестве простого примера, если V в = 1 В и R f = R g , V из будет 2 В, величина, необходимая для поддержания V – на уровне 1 В. Из-за обратной связи предусмотрено R f , R g , это замкнутая цепь. Его общий коэффициент усиления V из / V из называется усилением с обратной связью A CL . Поскольку обратная связь отрицательна, в этом случае A CL меньше, чем A OL операционного усилителя.
Если отрицательная обратная связь не используется, операционный усилитель работает как переключатель или компаратор.
Применение:
Использование в проектировании электронных систем
Использование операционных усилителей в качестве схемных блоков намного проще и понятнее, чем указание всех их отдельных элементов схемы (транзисторы, резисторы и т. д.), независимо от того, используются ли усилители интегральные или дискретные. В первом приближении операционные усилители можно использовать так, как если бы они были идеальными блоками дифференциального усиления; на более позднем этапе могут быть установлены ограничения на допустимый диапазон параметров для каждого операционного усилителя.
Неинвертирующий усилитель:
Операционный усилитель, подключенный в конфигурации неинвертирующего усилителя
В неинвертирующем усилителе выходное напряжение изменяется в том же направлении, что и входное напряжение.
Уравнение усиления для операционного усилителя:
Однако в этой схеме V – является функцией V из из-за отрицательной обратной связи через цепь R 1 R 2 . Р 1 и Р 2 образуют делитель напряжения, а так как V – является высокоомным входом, он не нагружает его заметно. Следовательно:
, где
заменяет это в уравнение усиления, мы получаем:
Решение для V OUT :
Если OL очень большой, это упрощает до
inperting amplifier:
. операционный усилитель, включенный в конфигурацию инвертирующего усилителя
В инвертирующем усилителе выходное напряжение изменяется в направлении, противоположном входному напряжению.
Как и в случае с неинвертирующим усилителем, начнем с уравнения усиления операционного усилителя:
образован R f и R в . Опять же, вход операционного усилителя не создает заметной нагрузки, поэтому:
Подставляя это в уравнение усиления и решая для V out :
Если A OL очень велико, это упрощается до
Часто между неинвертирующим входом и землей вставляется резистор (чтобы оба входа «видели» одинаковые сопротивления), уменьшая входное напряжение смещения из-за разного падения напряжения из-за тока смещения, и может уменьшать искажения в некоторых операционных усилителях.
Конденсатор, блокирующий по постоянному току, может быть включен последовательно с входным резистором, когда частотная характеристика ниже постоянного тока не требуется и любое постоянное напряжение на входе нежелательно. То есть емкостная составляющая входного импеданса вставляет ноль постоянного тока и низкочастотный полюс, что придает схеме полосовую или высокочастотную характеристику.
2.7 Тиристор:
Тиристор представляет собой твердотельный полупроводниковый прибор с четырьмя чередующимися слоями материала N- и P-типа. Они действуют как битовые переключатели, проводящие, когда на их затвор поступает импульс тока, и продолжают проводить, пока они смещены в прямом направлении (то есть, пока напряжение на устройстве не реверсировано). Некоторые источники определяют управляемые кремнием выпрямители и тиристоры как синонимы.
Рис. 2.8 символ тиристора
Другие источники определяют тиристоры как более крупный набор устройств, по крайней мере, с четырьмя слоями чередующихся материалов N- и P-типа, включая:
Функция:
Тиристор представляет собой четырехслойное полупроводниковое устройство с тремя выводами, каждый слой которого состоит из попеременно материалов N-типа или P-типа, например P-N-P-N. Основные клеммы, обозначенные как анод и катод, расположены на всех четырех слоях, а управляющая клемма, называемая затвором, прикреплена к материалу р-типа рядом с катодом. (Вариант, называемый SCS — Silicon Controlled Switch — выводит все четыре уровня на клеммы.) Работу тиристора можно понять с точки зрения пары сильно связанных биполярных транзисторов, расположенных так, чтобы вызвать самоблокировку:
Тиристоры имеют три состояния:
- Обратный режим блокировки — напряжение подается в направлении, которое было бы заблокировано диодом
- Прямой режим блокировки — напряжение подается в направлении, которое заставит диод проводить, но тиристор еще не переведен в проводимость
- Режим прямой проводимости — тиристор переключился в проводимость и будет оставаться проводящим до тех пор, пока прямой ток не упадет ниже порогового значения, известного как «ток удержания»
Функция клеммы затвора:
Тиристор имеет три p-n перехода (серийные названия J 1 , J 2 , J 3 от анода).
Многоуровневая схема тиристора.
Когда анод имеет положительный потенциал V AK по отношению к катоду без напряжения на затворе, переходы J 1 и J 3 смещены в прямом направлении, а переход J 2 — в обратном пристрастный. Как J 2 имеет обратное смещение, проводимость отсутствует (состояние «Выкл.»). Теперь, если V AK превышает напряжение пробоя V BO тиристора, происходит лавинный пробой J 2 и тиристор начинает проводить (включенное состояние).
Если на вывод затвора подается положительный потенциал V G по отношению к катоду, пробой перехода J 2 происходит при меньшем значении V AK . Выбрав соответствующее значение V G тиристор может внезапно переключиться во включенное состояние.
После возникновения лавинного пробоя тиристор продолжает проводить ток независимо от напряжения на затворе до тех пор, пока: (а) не будет снят потенциал V AK или (b) ток через устройство (анод-катод) не станет меньше, чем ток удержания, указанный производителем. Следовательно, V G может быть импульсом напряжения, таким как выходное напряжение релаксационного генератора UJT.
Эти импульсы затвора характеризуются напряжением запуска затвора (В GT ) и ток запуска затвора (I GT ). Ток запуска затвора изменяется обратно пропорционально ширине импульса затвора таким образом, что очевидно, что для запуска тиристора требуется минимальный заряд затвора.
В – ВАХ: Ниже представлена вольтамперная характеристика тиристора:
Рис. 2.9 В – ВАХ тиристора.
Применение
Тиристоры в основном используются там, где задействованы большие токи и напряжения, и часто используются для управления переменными токами, когда изменение полярности тока вызывает автоматическое отключение устройства; называется операцией Zero Cross.
Тиристоры могут использоваться в качестве управляющих элементов для контроллеров с фазовым управлением, также известных как контроллеры с фазовым управлением.
Их также можно найти в источниках питания для цифровых цепей, где они используются в качестве своего рода «автоматического выключателя» или «лома», чтобы предотвратить повреждение компонентов, расположенных ниже по цепи, из-за сбоя в источнике питания.
Типы тиристоров:
• SCR — кремниевый управляемый выпрямитель
• ASCR — асимметричный SCR
• RCT — тиристор с обратной проводимостью
• LASCR — тиристор, активируемый светом, или LTT — тиристор, срабатывающий от света
• BOD — прерывающий диод — тиристор без затвора, срабатывающий от лавинного тока
- Диод Шокли — однонаправленный триггер и переключающее устройство
- Динистор — однонаправленное коммутационное устройство
- DIAC — Двунаправленное триггерное устройство
- SIDAC — Устройство двунаправленного переключения
- Trisil, SIDACtor — Двунаправленные защитные устройства
• TRIAC — триод для переменного тока — двунаправленное коммутационное устройство, содержащее две тиристорные структуры с общим затворным контактом
• BCT — двунаправленный управляющий тиристор — двунаправленное переключающее устройство, содержащее две тиристорные конструкции с отдельными контактами затвора
• GTO — тиристор отключения затвора
• IGCT — тиристор с коммутацией затвора со встроенным затвором
- MA-GTO — модифицированный анодный затвор Отключающий тиристор
- DB-GTO — отключающий тиристор с распределенным буферным затвором
• MCT — тиристор, управляемый полевым МОП-транзистором — содержит две дополнительные структуры полевого транзистора для включения/выключения.
- BRT — тиристор с регулируемым базовым сопротивлением
• LASS — Полупроводниковый переключатель, активируемый светом
• AGT — Тиристор с анодным затвором — Тиристор с затвором на слое n-типа рядом с анодом
• PUT или PUJT — Программируемый запрещающий транзистор — Тиристор с затвором на n- Типовой слой рядом с анодом, используемый в качестве функциональной замены транзистора запрета
• SCS — кремниевый управляемый переключатель или тиристорная тетрада — тиристор с катодным и анодным затворами.
2.8 Mosfet:
Полевой транзистор металл-оксид-полупроводник (MOSFET, MOS-FET или MOS FET) — это транзистор, используемый для усиления или переключения электронных сигналов. В полевых МОП-транзисторах напряжение на электроде затвора с оксидной изоляцией может индуцировать проводящий канал между двумя другими контактами, называемыми истоком и стоком. Канал может быть n-типа или p-типа (см. статью о полупроводниковых устройствах) и соответственно называется nMOSFET или pMOSFET (также обычно nMOS, pMOS). Это, безусловно, самый распространенный транзистор как в цифровых, так и в аналоговых схемах, хотя одно время транзистор с биполярным переходом был гораздо более распространенным.
Рис. 2.10 Символ полевого МОП-транзистора
Два мощных полевых МОП-транзистора в корпусе для поверхностного монтажа D2PAK. Работая как переключатели, каждый из этих компонентов может выдерживать блокирующее напряжение 120 вольт в выключенном состоянии и может проводить непрерывный ток 30 ампер во включенном состоянии, рассеивая до 100 Вт и управляя нагрузкой более 2000 Вт. Спичка изображена для масштаба.
IGFET — родственный термин, обозначающий полевой транзистор с изолированным затвором, и используется почти как синоним слова MOSFET, будучи более точным, поскольку во многих «MOSFET» используется неметаллический затвор и неоксидный изолятор затвора. Другой синоним — MISFET для полевого транзистора металл-изолятор-полупроводник 9.0003
Символы схемы:
Для МОП-транзистора используются различные символы. Базовая конструкция, как правило, представляет собой линию канала с истоком и стоком, выходящим из него под прямым углом, а затем изгибающимся под прямым углом в том же направлении, что и канал. Иногда для режима расширения используются три сегмента линии, а для режима истощения — сплошная линия. Еще одна линия проводится параллельно каналу для ворот.
Массовое соединение, если оно показано, показано соединенным с задней частью канала стрелкой, указывающей PMOS или NMOS. Стрелки всегда указывают от P к N, поэтому NMOS (N-канал в P-ячейке или P-подложке) имеет стрелку, указывающую внутрь (от объема к каналу). Если большая часть подключена к истоку (как это обычно бывает с дискретными устройствами), она иногда наклоняется, чтобы встретиться с истоком, выходящим из транзистора. Если объем не показан (как это часто бывает в конструкции ИС, поскольку они обычно имеют общий объем), иногда используется символ инверсии для обозначения PMOS, в качестве альтернативы можно использовать стрелку на истоке так же, как для биполярных транзисторов ( выход для nMOS, вход для pMOS).
Сравнение символов MOSFET режима расширения и режима истощения, а также символов JFET (нарисованы с истоком и стоком, упорядоченными таким образом, чтобы более высокие напряжения отображались на странице выше, чем более низкие):
| P-канал | |||||
| N-канальный | |||||
| JFET | МОП-транзистор enh | MOSFET enh (без объема) | МОП-транзистор от | ||
Для символов, на которых показан объемный или корпусной вывод, здесь он показан внутренне соединенным с источником. Это типичная конфигурация, но ни в коем случае не единственная важная конфигурация. Как правило, МОП-транзистор представляет собой устройство с четырьмя выводами, и в интегральных схемах многие МОП-транзисторы имеют общее соединение корпуса, не обязательно подключенное к выводам истока всех транзисторов.
Mosfet Operation:
Структура металл-оксид-полупроводник
Традиционная структура металл-оксид-полупроводник (МОП) получается путем выращивания слоя диоксида кремния (SiO2) поверх кремниевой подложки и осаждения слоя металла или поликристаллического кремния (обычно используется последний). Поскольку диоксид кремния является диэлектрическим материалом, его структура эквивалентна плоскому конденсатору, в котором один из электродов заменен полупроводником.
Пример применения N-канального МОП-транзистора. При нажатии переключателя загорается светодиод.
Структура металл-оксид-полупроводник на кремнии P-типа
Когда к МОП-структуре прикладывается напряжение, оно изменяет распределение зарядов в полупроводнике. Если мы рассмотрим полупроводник P-типа (где NA — плотность акцепторов, p — плотность дырок; p = NA в нейтральном объеме), положительное напряжение VGB от затвора к корпусу (см. рисунок) создает обедненный слой, заставляя положительно заряженные дырки вдали от интерфейса затвор-изолятор / полупроводник, оставляя открытой область без носителей неподвижных отрицательно заряженных акцепторных ионов (см. Легирование (полупроводник)). Если VGB достаточно велико, в инверсионном слое, расположенном в тонком слое рядом с границей раздела полупроводник-диэлектрик, образуется высокая концентрация отрицательных носителей заряда. В отличие от МОП-транзистора, где электроны инверсионного слоя быстро поступают с электродов истока/стока, в МОП-конденсаторе они производятся гораздо медленнее за счет тепловой генерации за счет центров генерации носителей и рекомбинации в области обеднения. Условно напряжение на затворе, при котором объемная плотность электронов в инверсионном слое совпадает с объемной плотностью дырок в теле, называется пороговым напряжением.
Эта структура с корпусом p-типа является основой полевого МОП-транзистора N-типа, который требует добавления областей истока и стока N-типа.
БЛОК ПИТАНИЯ
Введение:
Блоки питания, которые могут давать синусоидальную волну (12sinwt), +12В, -12В понять основные принципы конструкции и работы, краткое описание таких устройств и компонентов обсуждается в эта глава.
Трансформатор:
Эта статья об электрическом устройстве. Чтобы узнать о франшизе линии игрушек, см. « Трансформеры» . Чтобы узнать о других значениях, см. Трансформер (значения).
Трансформатор — это устройство, передающее электрическую энергию от одной цепи к другой через индуктивно связанные проводники — катушки трансформатора. Изменяющийся ток в первой или первичной обмотке создает переменный магнитный поток в сердечнике трансформатора и, следовательно, переменное магнитное поле во вторичной обмотке. Это переменное магнитное поле индуцирует переменную электродвижущую силу (ЭДС) или «напряжение» во вторичной обмотке. Этот эффект называется взаимной индукцией.
Рис. 3.1 Трансформатор.
Если к вторичной обмотке подключена нагрузка, то во вторичной обмотке будет протекать электрический ток, и электрическая энергия будет передаваться из первичной цепи через трансформатор в нагрузку. В идеальном трансформаторе индуцированное напряжение во вторичной обмотке (V s ) пропорционально первичному напряжению (V p ), и определяется отношением числа витков во вторичной ) к числу витков в первичке (N p ) следующим образом:
Путем соответствующего выбора соотношения витков трансформатор, таким образом, позволяет «повышать» напряжение переменного тока (AC), делая N s больше, чем N p , или « шаг вниз», сделав N s меньше, чем N p .
Основные принципы:
Трансформатор основан на двух принципах: во-первых, электрический ток может создавать магнитное поле (электромагнетизм), и, во-вторых, что изменяющееся магнитное поле внутри катушки с проводом индуцирует напряжение на концы катушки (электромагнитная индукция). Изменение тока в первичной обмотке изменяет создаваемый магнитный поток. Изменяющийся магнитный поток индуцирует напряжение во вторичной обмотке.
Уравнение идеальной мощности:
Если вторичная катушка подключена к нагрузке, обеспечивающей протекание тока, электрическая мощность передается из первичной цепи во вторичную. В идеале трансформатор совершенно эффективен; вся поступающая энергия преобразуется из первичной цепи в магнитное поле и во вторичную цепь. Если это условие выполнено, входящая электрическая мощность должна равняться исходящей мощности:
, что дает уравнение идеального трансформатора
Трансформаторы обычно имеют высокий КПД, поэтому эта формула является разумным приближением.
Рис. 3.2 Идеальные трансформаторы
При увеличении напряжения ток уменьшается во столько же раз. Импеданс в одной цепи преобразуется квадратом коэффициента трансформации. Например, если импеданс Z s подключен к клеммам вторичной обмотки, для первичной цепи он будет иметь импеданс (N p /N s ) 2 Z с . Это соотношение является обратным, так что импеданс Z p первичной цепи представляется вторичной как (N s / N p ) 2 Z p.
Подробное описание работы:
В приведенном выше упрощенном описании не учитываются некоторые практические факторы, в частности первичный ток, необходимый для создания магнитного поля в сердечнике, и вклад в поле из-за тока во вторичной цепи.
Модели идеального трансформатора обычно предполагают сердечник с пренебрежимо малым сопротивлением и две обмотки с нулевым сопротивлением. При подаче напряжения на первичную обмотку протекает небольшой ток, приводящий в движение магнитный поток вокруг магнитопровода сердечника. Ток, необходимый для создания потока, называется током намагничивания; поскольку предполагалось, что идеальное ядро имеет почти нулевое сопротивление, током намагничивания можно пренебречь, хотя он все же необходим для создания магнитного поля.
Изменяющееся магнитное поле индуцирует электродвижущую силу (ЭДС) в каждой обмотке. Поскольку идеальные обмотки не имеют импеданса, они не имеют связанного с ними падения напряжения, поэтому напряжения V P и V S , измеренные на зажимах трансформатора, равны соответствующим ЭДС. Первичная ЭДС, действующая против первичного напряжения, иногда называется «обратной ЭДС». Это связано с законом Ленца, который гласит, что индукция ЭДС всегда будет такой, что будет препятствовать развитию любого такого изменения магнитного поля.
Types:
· Autotransformer
· Polyphase transformers
· Leakage transformers
· Resonant transformers
· Audio transformers
· Instrument transformers
Classification:
Transformers can be considered a класс электрической машины без движущихся частей; как таковые они описываются как статические электрические машины. Их можно классифицировать по-разному; неполный список:
- По мощности: от долей вольт-ампер (ВА) до более тысячи МВА;
- По частотному диапазону: мощность, аудио или радиочастота;
- По классу напряжения: от единиц вольт до сотен киловольт;
- По типу охлаждения: с воздушным, масляным, вентиляторным или водяным охлаждением;
- По применению: например, источник питания, согласование импеданса, стабилизатор выходного напряжения и тока или изоляция цепи;
- По назначению: распределительный, выпрямительный, дуговой, усилительный выход и др.;
- По соотношению витков обмотки: повышающие, понижающие, изолирующие с равным или близким соотношением, переменные и многообмоточные.
Области применения:
Трансформаторы широко используются в электронной продукции для понижения напряжения питания до уровня, подходящего для низковольтных цепей, которые они содержат. Трансформатор также электрически изолирует конечного пользователя от контакта с напряжением питания.
Преобразователи сигналов и звуковых сигналов используются для соединения каскадов усилителей и для согласования таких устройств, как микрофоны и проигрыватели, со входом усилителей. Аудиотрансформаторы позволяли телефонным цепям вести двусторонний разговор по одной паре проводов. Балунный трансформатор преобразует сигнал, относящийся к земле, в сигнал со сбалансированными напряжениями относительно земли, например, между внешними кабелями и внутренними цепями.
Принцип трансформатора с разомкнутой цепью (без нагрузки) широко используется для характеризации магнитомягких материалов, например, в методе рамок Эпштейна, стандартизированном на международном уровне.
3.3 Выпрямитель:
Выпрямитель представляет собой электрическое устройство, которое преобразует переменный ток (AC), который периодически меняет направление, в постоянный ток (DC), который имеет только одно направление, процесс, известный как выпрямление. Выпрямители имеют множество применений, в том числе в качестве компонентов источников питания и детекторов радиосигналов. Выпрямители могут состоять из твердотельных диодов, кремниевых выпрямителей, ламповых диодов, ртутных дуговых вентилей и других компонентов.
Полуволновое выпрямление
При однополупериодном выпрямлении пропускается либо положительная, либо отрицательная половина волны переменного тока, а другая половина блокируется. Поскольку только половина входного сигнала достигает выхода, он очень неэффективен, если используется для передачи энергии. Однополупериодное выпрямление может быть достигнуто с помощью одного диода в однофазном питании или с тремя диодами в трехфазном питании.
Выходное постоянное напряжение однополупериодного выпрямителя можно рассчитать с помощью следующих двух идеальных уравнений:
Двухполупериодный выпрямитель
Двухполупериодный выпрямитель преобразует всю форму входного сигнала в сигнал постоянной полярности (положительный или отрицательный) на выходе. Полноволновое выпрямление преобразует обе полярности входного сигнала в постоянный ток (постоянный ток) и является более эффективным.