Содержание
Управление бесколлекторным двигателем постоянного тока в комбинированном режиме
Авторы работы: И. Джанпан, Р. Чайсричароен, П. Буньянант, Тайланд. Перевод материала выполнен компанией ИНЕЛСО.
Аннотация
Считается, что бесколлекторный двигатель постоянного тока (BLDC) отличается хорошими эксплуатационными характеристиками: не требует высоких затрат на техническое обслуживание, является достаточно универсальным, обладает приемлемым крутящим моментом и скоростью вращения, а также высокой надежностью. Как правило, самый простой BLDC-двигатель состоит из ротора с постоянными магнитами и трех обмоток статора. На каждом шаге управления две из трех обмоток участвуют в создании вращающего магнитного поля, в то время как в обесточенной обмотке наводится обратная электродвижущая сила (ЭДС) и возникает паразитный электрический ток, поступающий на вход контроллера. В данной работе предложена схема управления BLDC-двигателем в комбинированном режиме, в котором генерируемый ток запасается с помощью дополнительной коммутационной схемы для дальнейшего использования. Таким образом, BLDC-двигатель может приводить в движение нагрузку одновременно с выработкой электроэнергии. Предлагаемая коммутационная схема была разработана и смоделирована в ПО PSpice. Результаты моделирования показывают, что на накопительную емкость может быть подано до 75% от входного напряжения.
Таким образом, BLDC-двигатель может приводить в движение нагрузку одновременно с выработкой электроэнергии. Предлагаемая коммутационная схема была разработана и смоделирована в ПО PSpice. Результаты моделирования показывают, что на накопительную емкость может быть подано до 75% от входного напряжения.
1. Введение
В нашем быстро меняющемся мире производство электроэнергии является крайне важным, ведь количество используемых нами электроприборов и потребляемого электричества сейчас выше, чем когда-либо. Для преобразования физической энергии в электрическую было изобретено несколько типов устройств. Основным устройством для преобразования механической энергии в электрическую, и последующего её накопления в аккумуляторных батареях, является генератор. Обратное преобразование электрической энергии в механическую осуществляется с помощью электродвигателя.
В данной статье предложен новый способ управления, позволяющий электродвигателю одновременно генерировать электрическую и механическую энергию. Здесь рассматривается бесколлекторный двигатель постоянного тока (BLDC). Поскольку BLDC-двигатель содержит вращающиеся постоянные магниты и неподвижный якорь, следовательно, подача тока на движущийся ротор больше не является проблемой. BLDC-двигатели обладают рядом преимуществ перед щеточными двигателями постоянного тока и асинхронными двигателями, включая больший крутящий момент на единицу веса и более высокий КПД, имеют пониженный уровень шума, обладают повышенной надежностью и более длительным сроком службы (отсутствует износ щеток и коллектора), а также лишены такого недостатка, как искрение коллектора.
Здесь рассматривается бесколлекторный двигатель постоянного тока (BLDC). Поскольку BLDC-двигатель содержит вращающиеся постоянные магниты и неподвижный якорь, следовательно, подача тока на движущийся ротор больше не является проблемой. BLDC-двигатели обладают рядом преимуществ перед щеточными двигателями постоянного тока и асинхронными двигателями, включая больший крутящий момент на единицу веса и более высокий КПД, имеют пониженный уровень шума, обладают повышенной надежностью и более длительным сроком службы (отсутствует износ щеток и коллектора), а также лишены такого недостатка, как искрение коллектора.
BLDC-двигателями можно управлять в 3 режимах: в режиме двигателя, в режиме генератора, и гибридном. Для управления устройством в режиме двигателя было предложено несколько методов. В [1] Ситай и соавторы выбрали в качестве схемы управления трехфазное двухполупериодное мостовое подключение звездой и проанализировали три схемы замкнутых систем управления с DSP. Ясухиро и др.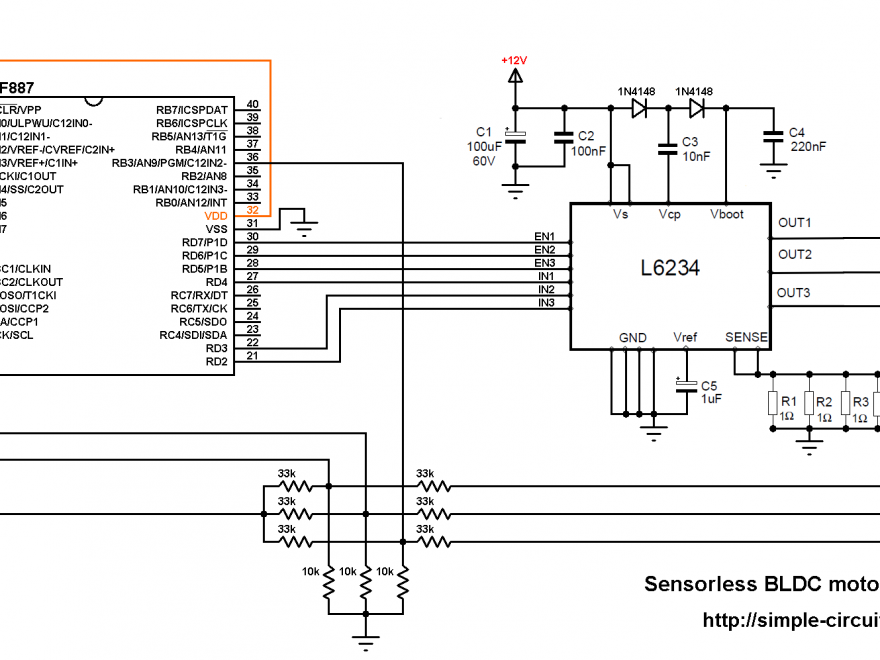 [2] рассматривали небольшую систему BLDC-двигателя. Они предложили конструкцию, основанную на однонаправленных потоках тока. В [3, 4] для управления двигателем на базе DSP, используется трехфазный ШИМ контроллер. В работе было предложено управление BLDC-двигателем с помощью регулятора на базе нечеткой логики без датчиков. В [5] вместо дорогих датчиков Холла для определения точки пересечения нуля сигнала обратной ЭДС на невозбужденной фазе, используются два сопротивления. Система управления с нечеткой логикой реализована на микроконтроллере.
[2] рассматривали небольшую систему BLDC-двигателя. Они предложили конструкцию, основанную на однонаправленных потоках тока. В [3, 4] для управления двигателем на базе DSP, используется трехфазный ШИМ контроллер. В работе было предложено управление BLDC-двигателем с помощью регулятора на базе нечеткой логики без датчиков. В [5] вместо дорогих датчиков Холла для определения точки пересечения нуля сигнала обратной ЭДС на невозбужденной фазе, используются два сопротивления. Система управления с нечеткой логикой реализована на микроконтроллере.
В [6, 7] было предложено несколько методов с использованием синхронного выпрямителя и преобразователя для управления устройством в режиме генератора. В [8] постоянный магнит в роторе BLDC-генератора заменен вспомогательной катушкой возбуждения.
Управление устройством в гибридном режиме является главной проблемой в этой области. Гибридный режим – это способ управления, позволяющий устройству работать попеременно двигателем и генератором. В [9] Ким и др. рассмотрели методы управления, которые минимизируют пульсации крутящего момента и максимизируют удельную мощность BLDC-двигателя/генератора постоянного тока в электромобилях и гибридных автомобилях. Кроме того, в [10] была предложена конструкция гибридной системы 20-ти кВт BLDC-двигателя на постоянных магнитах (PM). В статье описана PM BLDC-двигатель, подключенная к дизельному двигателю автомобиля объемом 1,9 л, вырабатывающая электроэнергию для зарядки высоковольтной системы накопления энергии и для приведения в действие асинхронного двигателя, присоединенного к задним колесам. Устройство также может использовать накопленную энергию для запуска двигателя или содействия основному двигателю при разгоне автомобиля. В [11] Афджей и Торкаман сравнили два новых типа конфигурации двигатель/генератор, вентильный реактивный электродвигатель (ВРД) и BLDC-двигатель без постоянных магнитов.
В [9] Ким и др. рассмотрели методы управления, которые минимизируют пульсации крутящего момента и максимизируют удельную мощность BLDC-двигателя/генератора постоянного тока в электромобилях и гибридных автомобилях. Кроме того, в [10] была предложена конструкция гибридной системы 20-ти кВт BLDC-двигателя на постоянных магнитах (PM). В статье описана PM BLDC-двигатель, подключенная к дизельному двигателю автомобиля объемом 1,9 л, вырабатывающая электроэнергию для зарядки высоковольтной системы накопления энергии и для приведения в действие асинхронного двигателя, присоединенного к задним колесам. Устройство также может использовать накопленную энергию для запуска двигателя или содействия основному двигателю при разгоне автомобиля. В [11] Афджей и Торкаман сравнили два новых типа конфигурации двигатель/генератор, вентильный реактивный электродвигатель (ВРД) и BLDC-двигатель без постоянных магнитов.
Отметим, что в обычных гибридных системах устройство поочередно переключается между режимами двигателя и генератора. В данной статье предлагается новый метод управления, который позволяет накапливать энергию во время работы двигателя. Статья структурирована следующим образом: работа системы управления BLDC-двигателем в комбинированном режиме обсуждается в разделе 2; имитационная модель и результат моделирования приведены в разделах 3 и 4, соответственно. Выводы приведены в разделе 5.
В данной статье предлагается новый метод управления, который позволяет накапливать энергию во время работы двигателя. Статья структурирована следующим образом: работа системы управления BLDC-двигателем в комбинированном режиме обсуждается в разделе 2; имитационная модель и результат моделирования приведены в разделах 3 и 4, соответственно. Выводы приведены в разделе 5.
2. Управление BLDC-двигателем в комбинированном режиме
В данном разделе описаны вопросы комбинированного режима управления BLDC-двигателем. В предлагаемом режиме генерация и накопление электроэнергии в батареях происходит одновременно с его работой.
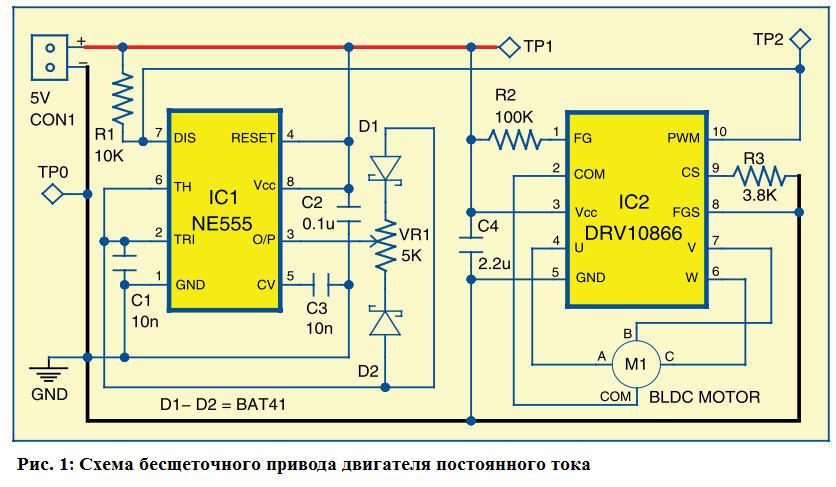
Обычно трехфазный BLDC-двигатель имеет три обмотки статора, однако их количество может быть увеличено для уменьшения пульсации крутящего момента. На рисунке 1 приведена электрическая схема статора, состоящего из трех обмоток A, B и C. Ротор BLDC-двигателя содержит четное количество постоянных магнитов. Число магнитных полюсов в роторе также влияет на размер шага и пульсацию крутящего момента двигателя. Чем больше количество полюсов, тем меньше шаг двигателя и пульсация крутящего момента. BLDC-двигателя с одной парой полюсов показан на рис. 1.
Чем больше количество полюсов, тем меньше шаг двигателя и пульсация крутящего момента. BLDC-двигателя с одной парой полюсов показан на рис. 1.
Если на обмотки двигателя правильно подано питание, возникает магнитное поле, и ротор приводится в движение. Наиболее простым методом коммутационного управления, используемым для BLDC-двигателей, является схема включения-выключения: через обмотку либо проходит ток, либо нет. В 3-фазном BLDC-двигателе питание подается одновременно только на две обмотки, а третья обмотка остается обесточенной.
В предложенном комбинированном режиме управления устройством неактивная обмотка используется для генерации электроэнергии во время работы двигателя.
Рис. 1. Упрощенные схемы BLDC -двигателей [13]
Рис. 2. Временная диаграмма работы BLDC-двигателя
Для создания вращающего магнитного поля, толкающего ротор, производится одновременная подача энергии на 2 фазы BLDC-двигателя. Статическое выравнивание, показанное на рис. 2, может быть задано за счет прохождения электрического тока от клеммы A к клемме B (путь тока отмечен на схеме рис.1 цифрой 1). Ротор можно заставить повернуться по часовой стрелке на 60 градусов от положения A-B, обеспечив протекание тока от клеммы C к B (этот путь тока отмечен на схеме цифрой 2). Если непрерывно приводить двигатель в действие таким образом, то он может совершить полный оборот на 360° при достижении конечного шага №6. Как видно из временной диаграммы, приведенной на рис. 2, электрическая энергия может быть получена на выходе, когда постоянное магнитное поле ротора движется сквозь обесточенную обмотку. При этом каждая обмотка может генерировать электроэнергию дважды за один оборот.
Статическое выравнивание, показанное на рис. 2, может быть задано за счет прохождения электрического тока от клеммы A к клемме B (путь тока отмечен на схеме рис.1 цифрой 1). Ротор можно заставить повернуться по часовой стрелке на 60 градусов от положения A-B, обеспечив протекание тока от клеммы C к B (этот путь тока отмечен на схеме цифрой 2). Если непрерывно приводить двигатель в действие таким образом, то он может совершить полный оборот на 360° при достижении конечного шага №6. Как видно из временной диаграммы, приведенной на рис. 2, электрическая энергия может быть получена на выходе, когда постоянное магнитное поле ротора движется сквозь обесточенную обмотку. При этом каждая обмотка может генерировать электроэнергию дважды за один оборот.
Рис. 3. Структурная схема аппаратной части системы
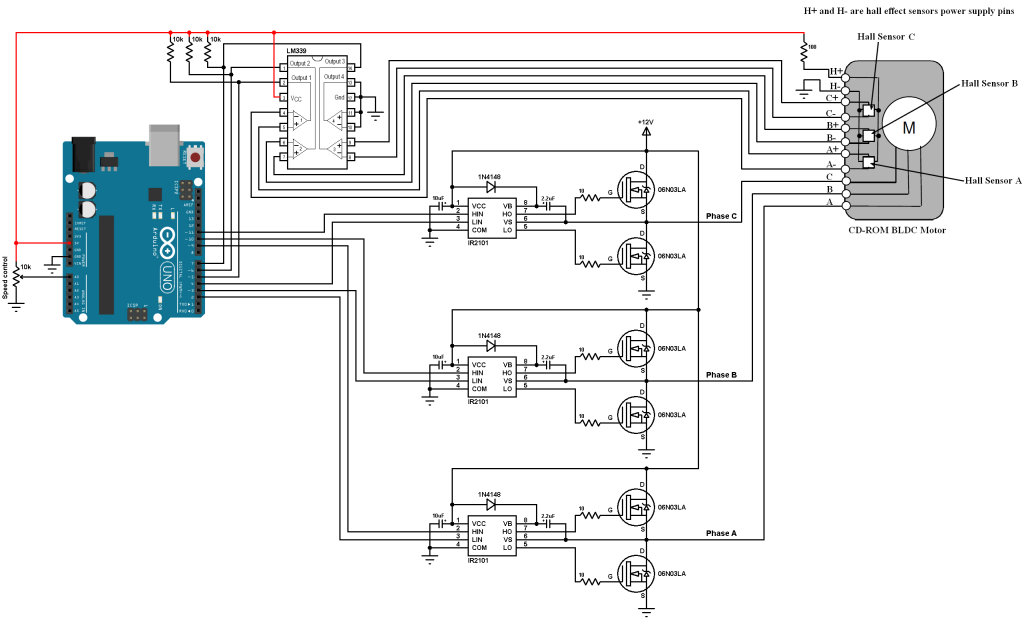
На рис. 3 показана структурная схема предлагаемой системы управления BLDC-двигателем в комбинированном режиме. Здесь в качестве входных данных для микроконтроллера PIC16F877 служат команда скорости и сигнал от датчиков Холла.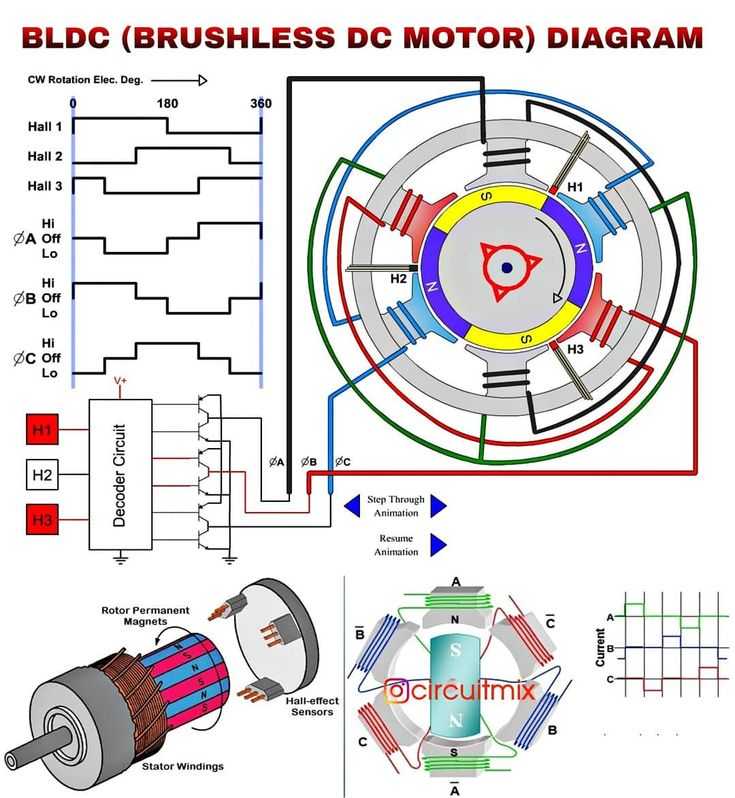 Микроконтроллер осуществляет вычисление управляющей переменной с помощью определенного алгоритма, и преобразует её в PWM (ШИМ) сигнал. PWM1 – это сигнал управления драйвером MOSFET, используемым для вращения двигателя, в то время как PWM2 используется для управления транзисторами MOSFET системы сбора электрической энергии с обесточенной обмотки. На рис. 4 приведена подробная электрическая принципиальная схема ключей MOSFET, соответствующая блок-схеме, представленной на рис. 3. В процессе работы 8 MOSFET-транзисторов будут задействованы для управления двумя активными обмотками, создающими вращающее магнитное поле (режим двигателя), в то время как два других MOSFET-транзистора обеспечат возможность запасания энергии, полученной от неактивной обмотки, системой (режим генератора).
Микроконтроллер осуществляет вычисление управляющей переменной с помощью определенного алгоритма, и преобразует её в PWM (ШИМ) сигнал. PWM1 – это сигнал управления драйвером MOSFET, используемым для вращения двигателя, в то время как PWM2 используется для управления транзисторами MOSFET системы сбора электрической энергии с обесточенной обмотки. На рис. 4 приведена подробная электрическая принципиальная схема ключей MOSFET, соответствующая блок-схеме, представленной на рис. 3. В процессе работы 8 MOSFET-транзисторов будут задействованы для управления двумя активными обмотками, создающими вращающее магнитное поле (режим двигателя), в то время как два других MOSFET-транзистора обеспечат возможность запасания энергии, полученной от неактивной обмотки, системой (режим генератора).
Рис. 4. Схема драйвера комбинированного режима
Для управления ключами MOSFET рассмотрена схема двигателя, приведенная на рис. 1 и временная диаграмма, показанная на рис.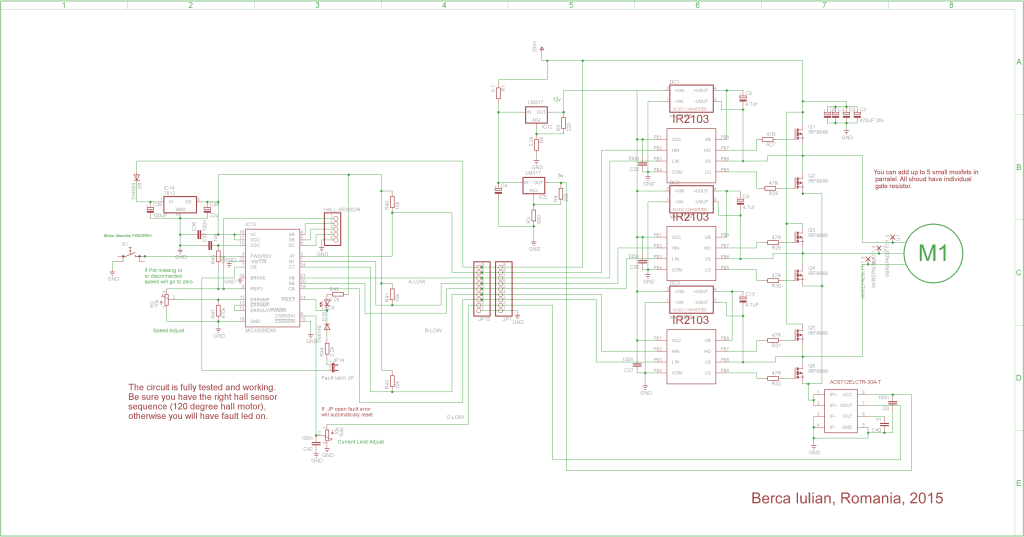 2. В таблице 1 по шагам расписано управляющее воздействие, подаваемое на MOSFET-транзисторы в соответствии с сигналом, поступающим с датчиков Холла.
2. В таблице 1 по шагам расписано управляющее воздействие, подаваемое на MOSFET-транзисторы в соответствии с сигналом, поступающим с датчиков Холла.
Таблица 1. Временная диаграмма для комбинированного режима управления, состоящая из 6 шагов
3. Моделирование системы
На рис. 5 приведена предлагаемая нами схема управления, смоделированная в ПО PSpice – программе, предназначенной для симуляции аналоговой и цифровой логики. В качестве модели обмотки статора трехфазного BLDC-двигателя на симуляции был использован трансформатор. Моделируемая схема управляется в соответствии с 6 ступенчатой временной диаграммой, приведенной на рис. 2.
Рис. 5. Схема предлагаемой системы комбинированного режима управления BLDC-двигателем, смоделированная в PSpice.
4. Результат моделирования
В этом разделе представлены некоторые результаты моделирования схемы комбинированного режима управления BLDC-двигателем/генератором для случая, когда BLDC-двигатель работает от постоянного входного напряжения 12В при 150 об/мин.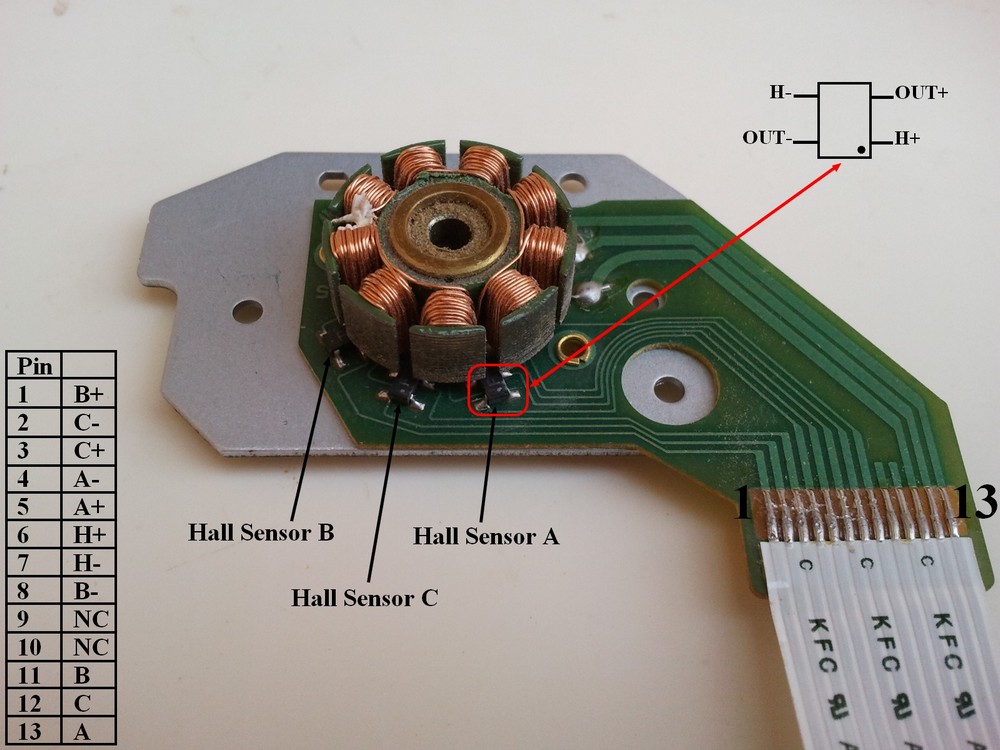
Рис. 6. 3-фазный выходной сигнал для комбинированного режима управления (моделирование)
На рисунке 6 приведены графики выходного напряжения, получаемого от каждой неактивной обмотки, во время работы BLDC-двигателя в комбинированном режиме. На рис. 7 и 8 приведены графики выходного напряжения, полученного на нагрузке 100 кОм и без нагрузки соответственно.
Здесь мы отметили, что выходные напряжения меняется в зависимости от величины нагрузки. Это должно наблюдаться и в реальном эксперименте с использованием зарядной цепи.
Рис. 7. Выходное напряжение при работе двигателя в комбинированном режиме на нагрузке 100 кОм
Рис. 8. Выходное электрическое напряжение при работе двигателя в комбинированном режиме на холостом ходу
5. Заключение
В статье предложен комбинированный режим управления BLDC-двигателем, в котором электроэнергия может быть получена во время работы двигателя. Для выработки электроэнергии, которая может быть подана обратно в систему или запасена в аккумуляторе для других целей, используется преимущества обесточенной обмотки BLDC-двигателя.
Для выработки электроэнергии, которая может быть подана обратно в систему или запасена в аккумуляторе для других целей, используется преимущества обесточенной обмотки BLDC-двигателя.
Было проведено моделирование в ПО PSpice. Результаты показывают, что, используя данный режим работы, мы можем получить выходные напряжения, составляющие около 75% от входного (9В от напряжения входа 12В), в отсутствие нагрузки. Реальная реализация предложенной системы будет дополнительно изучена.
Авторы статьи: И. Джанпана, Р. Чайсричароенб, П. Буньянанта
а Школа информационных технологий, Университет Маэ Фа Луанг, Чианграй, 57100 Таиланд
б Кафедра вычислительной техники, инженерный факультет Кампхаенг саен, Кампус Университета Касетсарт Кампхаенг саен, Накхонпатом, 73140 Таиланд
Список литературы
[1] Wang Xitai, Zhang Xuexiu, Li Lifeng, Liu Bingshan. Brushless DC Motor Speed Control System of the Walking Aids
Brushless DC Motor Speed Control System of the Walking Aids
Machine. IEEE/ICINIS; 2009, p. 589-592
[2] Komatsu Yasuhiro, Tur-Amgalan Amarsanaa, Yoshihiko Araki, Syed Abdul Kadir Zawawi, Takamura Keita. Design of the
Unidirectional Current Type Coreless DC Brushless Motor for Electrical Vehicle with Low Cost and High Efficiency.
IEEE/SPEEDAM; 2010, p. 1036-1039
[3] Sun Chunxiang, Mo Bo. Design of Control System of Brushless DC Motor Based on DSP. IEEE/ICICTA;2010, p. 11-14
[4] Chengang Zhao and Yaochun Wu . The Design of Brushless DC Motor Controller. IEEE; 2010, p. 729-731
[5] Jung-Sheng Wen, Chi-Hsu Wang, Ying-De Chang, Ching-Cheng Teng. Intelligent Control of High-Speed Sensorless
Brushless DC Motor for Intelligent Automobiles. IEEE/SMC; 2008, p. 3394-3398
[6] Orner c. Onar, Yusuf Gurkaynak, and Alireza Khaligh. A Brushless DC Generator & Synchronous Rectifier for Isolated
A Brushless DC Generator & Synchronous Rectifier for Isolated
Telecommunication Stations. IEEE/INTLEC; 2009, p. 1-6
[7] G. Gatto – I. Marongiu – A. Perfetto (*) – A. Serpi . Brushless DC Generator controlled by Constrained Predictive
Algorithm. IEEE; 2010, p. 1224-1229
[8] H. Moradi, M. Seyed Yazdi and E. Afjei. Brushless dc Generator without Permanent Magnet. IEEE/SPEEDAM; 2010, p.
278-281
[9] Taehyung Kim, Hyung-Woo Lee, Leila Parsa, Member, and Mehrdad Ehsani4. Optimal Power and Torque Control of a
Brushless DC (BLDC) Motor/Generator Drive in Electric and Hybrid Electric Vehicles. IEEE; 2006, p. 1276-1281
[10] S. M. N. Hasan, I. Husain, R. J. Veillette and J. E. Carletta. A PM Brushless DC Starter/Generator System for a Series#Parallel 2×2 Hybrid Electric Vehicle. IEEE; 2007, p. 1686-1689
[11] E.Afjei, H.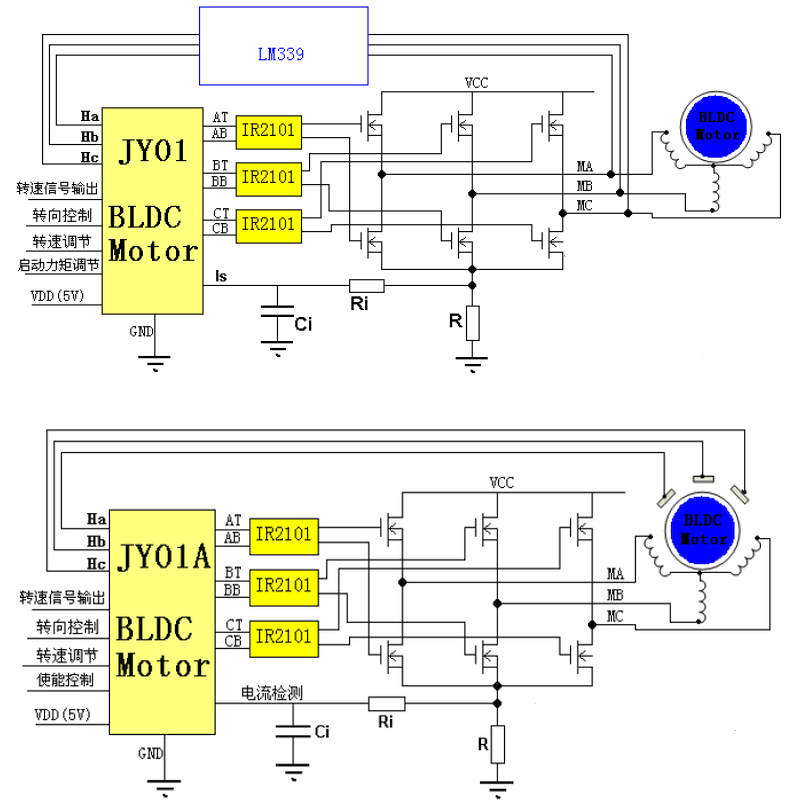 Torkaman . Comparison of Two Types of Hybrid Motor/Generator. IEEE/SPEEDAM; 2010, p. 982-986#
Torkaman . Comparison of Two Types of Hybrid Motor/Generator. IEEE/SPEEDAM; 2010, p. 982-986#
[12]
http://www.electronics-tutorials.ws/electromagnetism/electromagnetic-induction.html
Микросхемы управления бесколлекторными двигателями
Основная задача блока управления бесколлекторным двигателем — переключать обмотки статора в зависимости от положения ротора. Вот первый пример реализации инвертора — авиамодельный , самый дешевый. Фото с двух сторон. На одной стороне видно 6 транзисторов в корпусах SOIC.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Контроллер трехфазного бесколлекторного двигателя постоянного тока с минимальными ресурсами
- Управление бесколлекторным двигателем постоянного тока
- Управление бесколлекторными двигателями
- Управление бездатчиковыми бесколлекторными двигателями (Sensorless BLDC)
- Бесколлекторный электродвигатель — что это такое?
- Вентильный двигатель
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Бесколлекторные BLDC моторы «на пальцах»
 youtube.com/embed/tjmou9dtxBg» frameborder=»0″ allowfullscreen=»»/>
youtube.com/embed/tjmou9dtxBg» frameborder=»0″ allowfullscreen=»»/>
Контроллер трехфазного бесколлекторного двигателя постоянного тока с минимальными ресурсами
Re: пассики для проигрывателей винила Re: Динамическая индикация на LCD дисплее Re: Пассик на пленочный магнитофон Re: Продам набор SMD конденсаторов в корпусе Re: ШИМ-регулятор на Attiny13 Автор: AntonChip. Дата публикации: 30 октября Как известно в коллекторных двигателях постоянного тока коммутация обмоток в нужный момент времени осуществляется с помощью коллекторного узла якоря. В беcколлекторных двигателях коммутацией управляет электроника. Для определения момента коммутации контроллер может использовать или датчики положения Датчики Холла или обратную ЭДС, генерируемую неподключенными обмотками.
Датчики положения наиболее часто используются в низкооборотистых таговых двигателях, где пусковой момент существенно варьируется или где требуется его высокое значение, а также где двигатель используется для позиционирования. Управление бесколлекторными двигателями без датчиков используется в тех случаях, когда пусковой момент существенно не изменяется и когда отсутствует необходимость в управлении позиционированием, как, например, в вентиляторах.
Управление бесколлекторными двигателями без датчиков используется в тех случаях, когда пусковой момент существенно не изменяется и когда отсутствует необходимость в управлении позиционированием, как, например, в вентиляторах.
На каждой ступени коммутации, обмотка одной фазы подключается к положительному напряжению питания, другая — к отрицательному, а третья — остается неподключенной. Обратная ЭДС неподключенной фазы в результате пересекает ноль при пересечении среднего значения положительного и отрицательного напряжений. Пересечение ноля возникает всегда в центре между двумя коммутациями. На постоянной скорости или медленно изменяющейся скорости период времени от одной коммутации до пересечения нуля и время от пересечения нуля до следующей коммутации равны.
Это используется в качестве основы в данной реализации устройства управления без использования датчиков. Для определения сигналов обратной ЭДС будем использовать метод виртуальной средней точки, для этого меряем напряжение на свободной фазе и сравниваем его со средней точкой.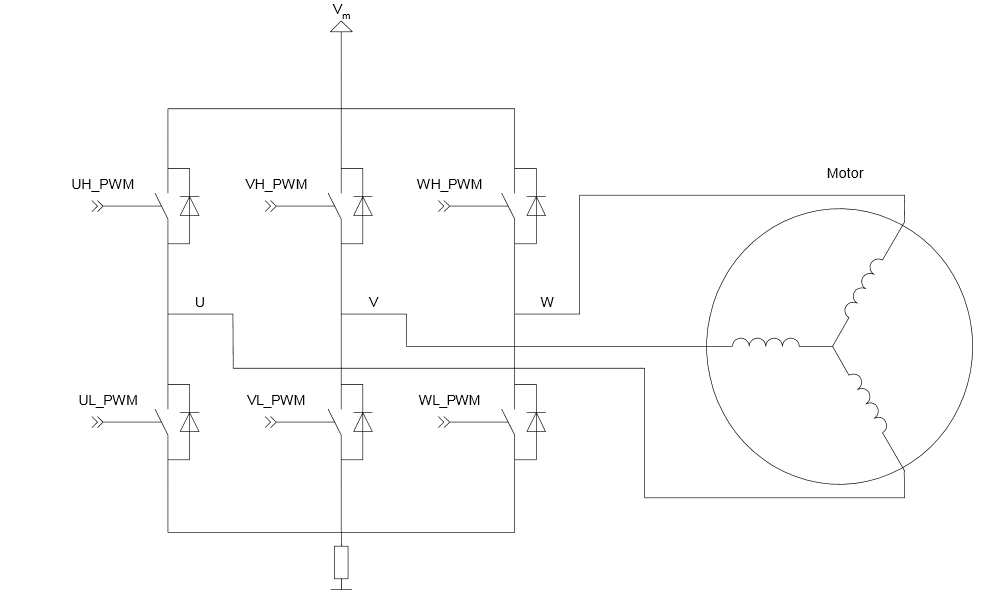
При использовании АЦП требуется некоторое время для преобразования, что снижает производительность, поэтому логичнее использовать аналоговые компараторы, нам ведь не нужно знать точное значение АЦП этого сигнала. Компаратор может генерировать прерывание в момент перехода напряжения через среднюю точку, а также выдавать логический сигнал своего состояния, что нам и будет нужно. Это дает возможность управления электрическим током с помощью аппаратных возможностей генерации ШИМ-сигналов при минимальном использовании программных ресурсов.
В этом случае управление скоростью выполняется за счет изменения скважности ШИМ-сигнала. Ниже представлены таблицы состояний сигналов подаваемых на верхние и нижние ключи, с направлением вращения по часовой и против часовой стрелки.
Метки: ATmega8 , Бесколлекторный двигатель. Энциклопедия радиолюбителя Онлайн калькуляторы. Простейшая программа Подключение семисегментных индикаторов к AVR. Для универсальности можно Вывод Е — сигнал синхроимпульса, он по сути должен переключаться Задержки примерные, согласно описанию Доброго времени суток.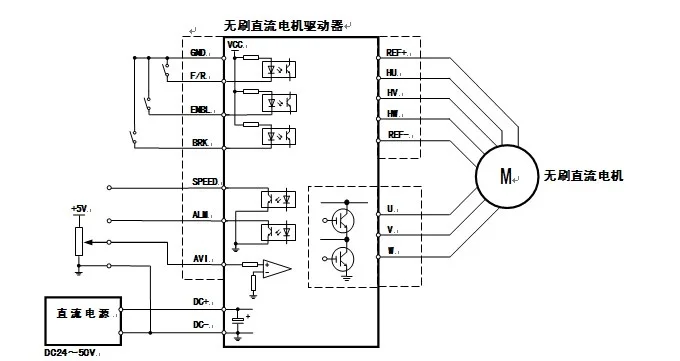
Не совсем понял функции записи команд и данных, точнее их логику. Зачем сначала С датчиками хола работает Просто подключить по схеме? Направление вращения есть возможность менять?
А можно ли применить эту схему для трезфазного асинхронника или мотор колеса без датчика Холла? Подскажите пожалуйста, можно ли сделать что то подобное на Attiny ? А вот переключения происходят не верно. Точка перехода через ноль должна находиться строго по середине между коммутациями фаз. В результате форма управления отличается от трапецеидальной , возрастают импульсные токи и всплески напряжений, что плохо для ключей, снижается КПД.
В данной реализации компаратор будет срабатывать на каждое переключение ШИМ. В работе маломощных единицы ВТ могут быть не заметны ошибки управления, в более мощных все ошибки будут очень очевидны в виде различных щелчков, рывков и т.
Попробуйте подключить двигатель в десятки и более ВТ и увидите. В тексте программы я не увидел, чтобы эти выводы использовались.
Обновить список комментариев. Добавить комментарий. Наша группа ВКонтакте. Простейшая программа. Запомнить меня. Файлы к статье «Управление бесколлекторным двигателем постоянного тока». Размер файла:
Управление бесколлекторным двигателем постоянного тока
Существуют бесколлекторный двигатели без каких либо датчиков положения или энкодеров. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на свободной фазе. Вращаясь, двигатель наводит ЭДС в свободной обмотке. По мере вращения напряжение на свободной фазе изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора. Обычно определяют момент перехода напряжения на свободной фазе через нулевую точку половину питающего напряжения. Разумеется, для работы этого метода двигатель должен вращаться.
Когда я начал разрабатывать блок управления бесколлекторным двигателем (мотор-колесом), было много вопросов о том, как.
Управление бесколлекторными двигателями
Хочешь стать куратором любимой темы? Автор AZM.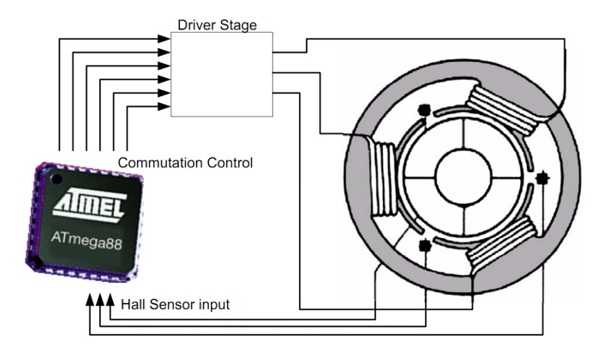 SU Раздел Микроэлектроника. Автор Merakules Раздел Ссылки на интересные ресурсы. В теме В разделе По форуму Google. Комментарии к новостям. Мы и закон, Закон и порядок. Где мы можем ездить?
SU Раздел Микроэлектроника. Автор Merakules Раздел Ссылки на интересные ресурсы. В теме В разделе По форуму Google. Комментарии к новостям. Мы и закон, Закон и порядок. Где мы можем ездить?
Управление бездатчиковыми бесколлекторными двигателями (Sensorless BLDC)
Снижение габаритов бытового электропривода, а также увеличение его надёжности является основной задачей для разработчиков современных систем. В настоящее время для использования в бытовых устройствах таких как пылесосы, насосы, холодильники, кондиционеры, взрывобезопасные системы для помещений с повышенной концентрацией горючих веществ в воздухе и так далее фирма HITACHI предлагает высоковольтные интегральные микросхемы для управления бесколлекторными двигателями, которые включают в себя драйвер силовых ключей для трёхфазной мостовой схемы и ШИМ-генератор. Также в микросхему могут быть включены силовая часть, выполненная на IGBT-транзисторах, схемы, реализующие защиту от токов короткого замыкания в силовой части и дополнительные функ-ции, позволяющие вплотную приблизиться к идеалу системы прямого цифрового управления.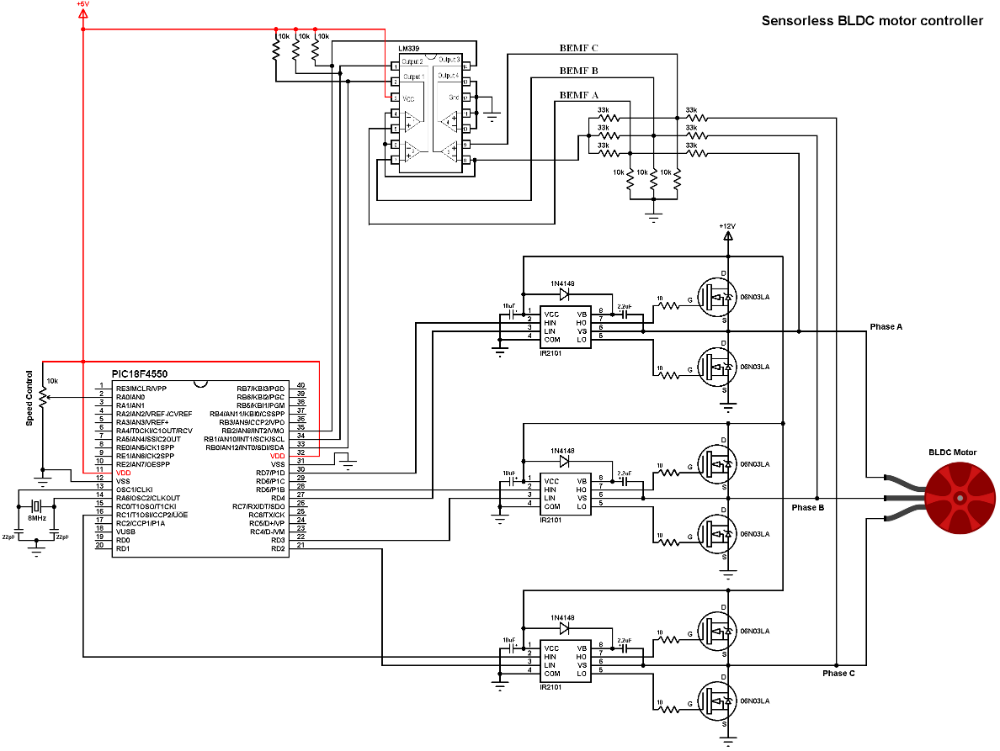 При этом возможно использование максимально простого микроконтроллера, так как многие функции управления могут осуществляться описываемыми микросхемами. Функционально высоковольтные микросхемы можно разделить на два класса: интеллектуальные драйверы для бесколлекторных двигателей и для инверторов табл.
При этом возможно использование максимально простого микроконтроллера, так как многие функции управления могут осуществляться описываемыми микросхемами. Функционально высоковольтные микросхемы можно разделить на два класса: интеллектуальные драйверы для бесколлекторных двигателей и для инверторов табл.
Подписавшись, Вы будете оперативно получать новости Электротехнической отрасли, кабельных заводов, наличие на складе, спецпредложения.
Бесколлекторный электродвигатель — что это такое?
Войдите , пожалуйста. Хабр Geektimes Тостер Мой круг Фрилансим. Войти Регистрация. Управляем бесколлекторными двигателями, господа Разработка веб-сайтов Из песочницы Привет Хабровчане! А речь сегодня пойдет о бесколлекторных двигателях, о регуляторах хода и как ими управлять. Что же такое бесколлекторный двигатель, я не буду долго расписывать сами можете посмотреть Wiki , а скажу в 2х словах, это 3х фазный двигатель постоянного тока.
Вентильный двигатель
Схема условно разделена на две части: левая — микроконтроллер с логикой, правая — силовая часть. Силовую часть можно модифицировать для работы с двигателями другой мощности или с другим питающим напряжением. Но для моих задумок решительно не хватало 8 килобайт памяти. Эта схема задумывалась как испытательный стенд. В этой статье я опишу схему и принцип работы прошивки регулятора для управления бесколлекторными двигателями с датчиками Холла и без датчиков. Питание схемы раздельное.
Силовую часть можно модифицировать для работы с двигателями другой мощности или с другим питающим напряжением. Но для моих задумок решительно не хватало 8 килобайт памяти. Эта схема задумывалась как испытательный стенд. В этой статье я опишу схему и принцип работы прошивки регулятора для управления бесколлекторными двигателями с датчиками Холла и без датчиков. Питание схемы раздельное.
Тема работы: “Устройство управления бесколлекторным двигателем посто- 1) Типовые схемы управления бесколлекторными двигателями.
В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами электродвигателей , которые, совершенствуясь, находят все более широкое применение в самом различном оборудовании. Компания предлагает решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных , бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.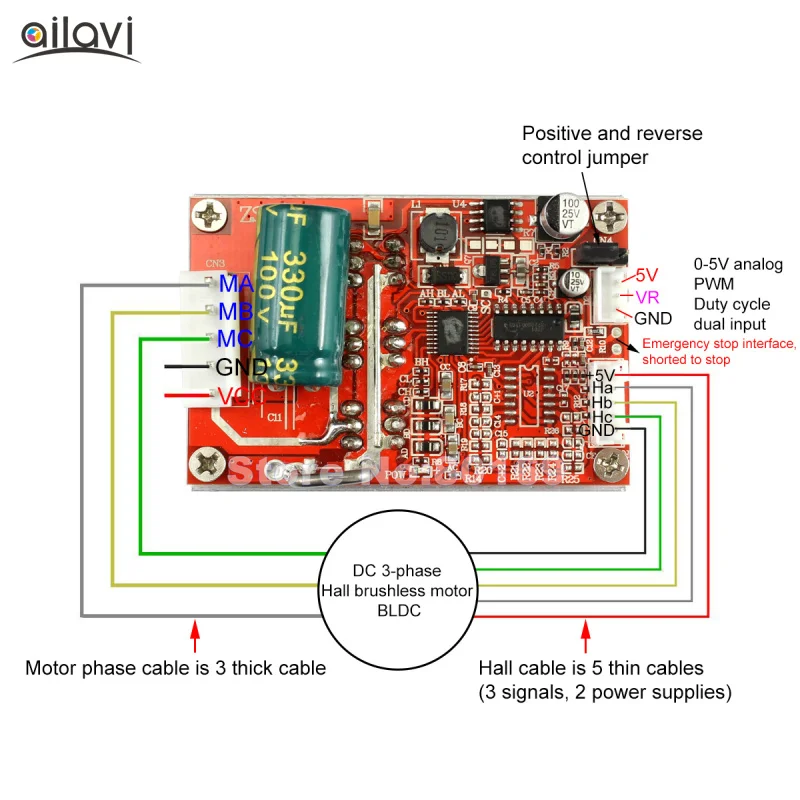 Электродвигатели находят широчайшее применение в современном высокотехнологическом укладе жизни. Этот тип электромеханического привода по-прежнему является одним из наиболее распространенных и востребованных.
Электродвигатели находят широчайшее применение в современном высокотехнологическом укладе жизни. Этот тип электромеханического привода по-прежнему является одним из наиболее распространенных и востребованных.
Механическая и регулировочная характеристики вентильного двигателя линейны и идентичны механической и регулировочной характеристикам электродвигателя постоянного тока. Как и электродвигатели постоянного тока, вентильные двигатели работают от сети постоянного тока. Фазные токи вентильного двигателя имеют синусоидальную форму. Как правило, в качестве усилителя мощности применяется автономный инвертор напряжения с широтно-импульсной модуляцией ШИМ. Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока БДПТ , который имеет трапецеидальное распределение магнитного поля в зазоре и характеризуется прямоугольной формой фазных напряжений.
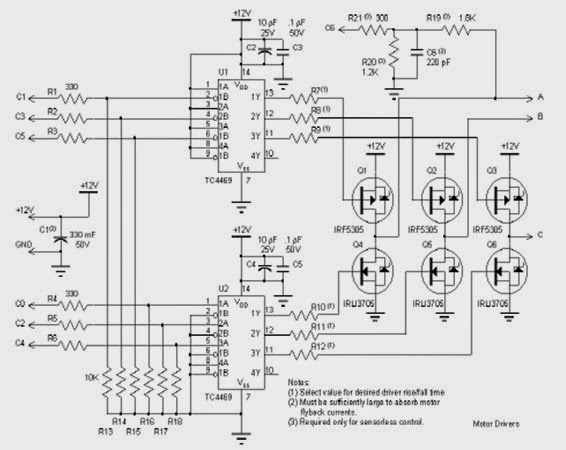
Все записи на субдомене: Электроника и механика записки от AZM. Раскрутить такой двигатель можно подключив его к трём полумостовым каскадам, которые управляются трёхфазным генератором, частота которого при включении очень мала, а затем плавно повысится до номинальной.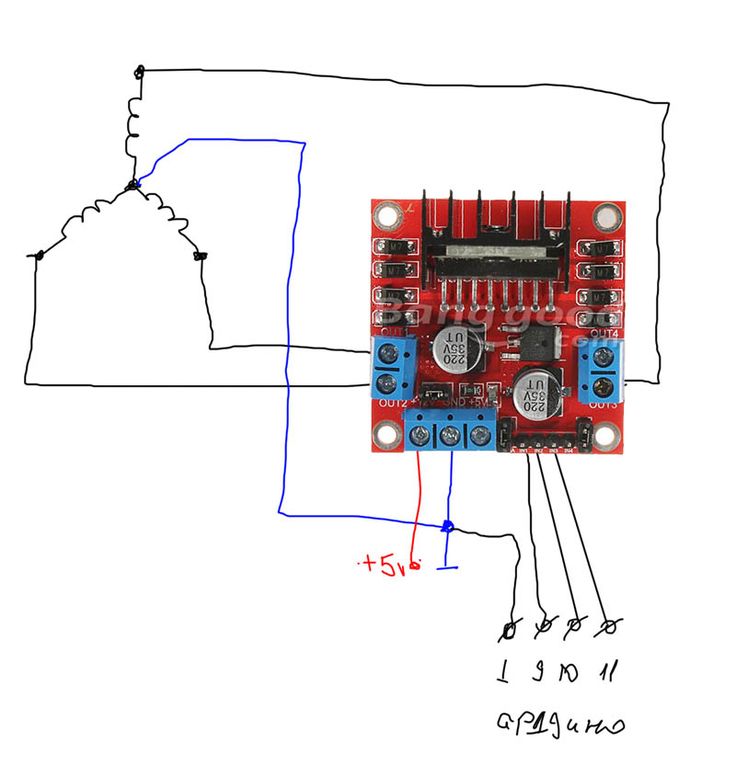
Данная статья сфокусирована на применении микроконтроллера с минимальными ресурсами для управления вентильным двигателем и скорости его вращения. Как микроконтроллер может управлять трехфазным БДПТ двигателем? Для того, чтобы ответить на этот вопрос требуется, чтобы были определены ресурсы микросхемы, которые в данном приложении будут взаимодействовать с внешней топологией и функциями управления двигателя БДПТ. Существуют сенсорные и безсенсорные конфигурации двигателей для определения положения ротора , которые имеют свои за и против. В данной статье мы рассмотрим управление двигателем с одним датчиком Холла. Структурная схема управления БДПТ двигателем.
Re: пассики для проигрывателей винила Re: Динамическая индикация на LCD дисплее Re: Пассик на пленочный магнитофон Re: Продам набор SMD конденсаторов в корпусе
Драйверы для бесщеточных двигателей постоянного тока (BLDC)
Максимизируйте производительность трехфазных бесщеточных двигателей и синхронных двигателей с постоянными магнитами (PMSM) с помощью нашего портфолио драйверов двигателей BLDC.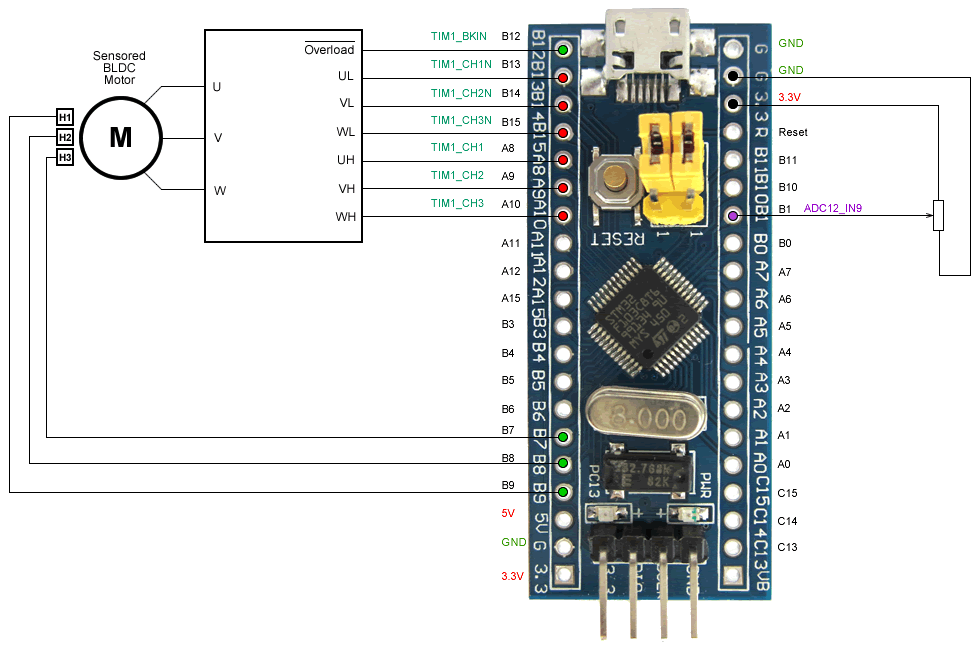 Благодаря таким ключевым функциям, как интеллектуальный привод затвора, интегрированное управление двигателем, встроенные полевые транзисторы и пакеты для проектирования функциональной безопасности, наши устройства улучшают дизайн промышленных, персональных электронных и автомобильных приложений.
Благодаря таким ключевым функциям, как интеллектуальный привод затвора, интегрированное управление двигателем, встроенные полевые транзисторы и пакеты для проектирования функциональной безопасности, наши устройства улучшают дизайн промышленных, персональных электронных и автомобильных приложений.
Рекомендуемые драйверы бесщеточных двигателей постоянного тока
Откройте для себя рекомендуемые приложения
Электронный усилитель рулевого управления (EPS)
Удовлетворение требований к функциональной безопасности самого высокого уровня и точному измерению тока для EPS в автомобильных приложениях с аккумуляторной батареей 12 В с надежными драйверами затвора BLDC.
Вакуумный робот
Создавайте высокоскоростные и надежные вакуумные роботы с помощью наших встроенных драйверов двигателей постоянного тока, не требующих кода.
Электроинструменты
Создание бесщеточных систем привода постоянного тока для высокопроизводительных электроинструментов.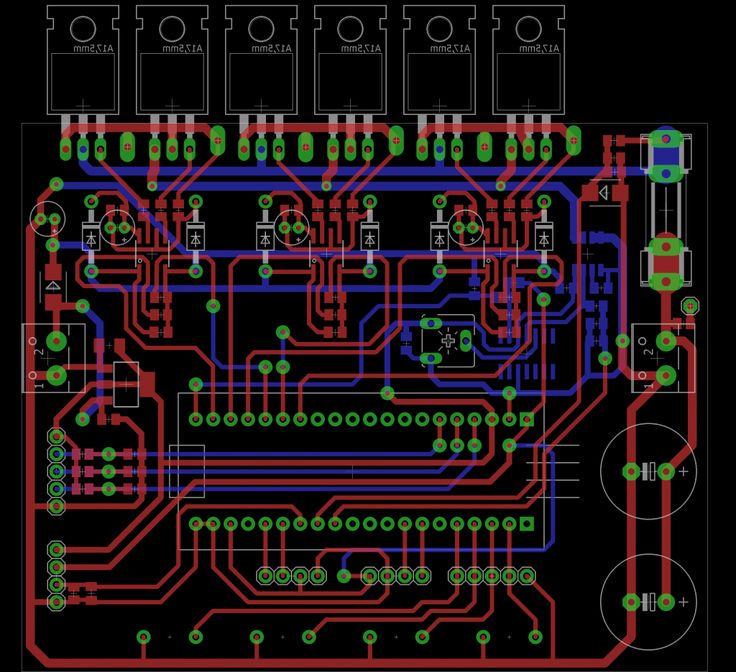
Обеспечивает высочайший уровень функциональной безопасности и точное измерение тока для EPS в автомобильных приложениях с аккумуляторными батареями 12 В с помощью надежных драйверов затворов постоянного тока BLDC.
Наши высокопроизводительные и высокоточные драйверы затворов с измерением тока помогают решить многие проблемы при проектировании систем двигателей BLDC для удовлетворения потребностей проектирования EPS.
- Функциональная безопасность — соответствует стандарту ISO 26262 для использования в системах с ASIL до D
- Точность определения тока для точной коммутации и обратной связи по крутящему моменту
- Поддерживает рабочее напряжение до 4,5 В при агрессивных условиях батареи
- Встроенная самопроверка (BIST), диагностика и защита от превышения/понижения напряжения, перегрузки по току и перегрева
- Мониторинг и защита VGS и VDS для предотвращения залипания и пробоя для полевых транзисторов нижнего и верхнего плеча
Избранные ресурсы
Создавайте высокоскоростные и надежные вакуумные роботы с помощью наших встроенных драйверов двигателей постоянного тока, не требующих кодирования.

Наш портфолио драйверов BLDC с интегрированным управлением предлагает удобные варианты для соответствия различным требованиям к двигателям, таким как двигатели всасывания, щетки и двигатели для мытья полов.
- Высокая мощность всасывания (электрическая скорость до 3 кГц) и высокий пусковой крутящий момент позволяют вакууму поддерживать постоянную скорость независимо от состояния пола
- Минимальные потери мощности благодаря методам выпрямления ASR и AAR для предотвращения потерь мощности и рассеяния тепла
- Обнаружение блокировки для распознавания препятствия (носка) в щеточном стержне, которое заклинивает или блокирует вращение стержня
Рекомендуемые ресурсы
ПРОДУКТЫ
- MCT8316A – макс. 40 В, пиковый ток 8 А, бездатчиковое трапециевидное управление 3-фазный привод двигателя постоянного тока BLDC
- MCT8316Z — макс. 40 В, пиковый ток 8 А, трапециевидное управление с датчиком, 3-фазный привод двигателя постоянного тока BLDC
- MCF8316A — макс.
 40 В, пиковый ток 8 А, бездатчиковое управление FOC, драйвер трехфазного двигателя постоянного тока BLDC
40 В, пиковый ток 8 А, бездатчиковое управление FOC, драйвер трехфазного двигателя постоянного тока BLDC
 40 В, пиковый ток 8 А, бездатчиковое управление FOC, драйвер трехфазного двигателя постоянного тока BLDC
40 В, пиковый ток 8 А, бездатчиковое управление FOC, драйвер трехфазного двигателя постоянного тока BLDCРАЗРАБОТКА АППАРАТНОГО ОБЕСПЕЧЕНИЯ
- MCT8316AEVM – Оценочный модуль MCT8316A для трехфазного бессенсорного трапециевидного привода бесконтактного двигателя постоянного тока
Создание систем бесщеточных двигателей постоянного тока для высокопроизводительных электроинструментов.
Наши высокопроизводительные драйверы затворов предлагают эффективные решения многих проблем, возникающих при проектировании систем двигателей BLDC, благодаря внедрению функций интеграции и разнообразному портфолио для удовлетворения потребностей проектирования электроинструментов.
Преимущества:
- Широкий диапазон напряжения двигателя, подходящий для условий рабочего напряжения от 5 В до 100 В
- Системная интеграция и небольшой размер корпуса для уменьшения форм-фактора
- Усовершенствованные встроенные функции защиты и диагностики для снижения сложности конструкции и повышения надежности системы
- Низкое потребление тока покоя для увеличения срока службы батареи в беспроводных приложениях
Рекомендуемые ресурсы
ПРОДУКТЫ
- DRV8300 — простой трехфазный драйвер затвора с макс. напряжением 100 В и диодами начальной загрузки
- DRV8323 — 3-фазный драйвер интеллектуальных затворов с макс. напряжением 65 В и токовыми шунтирующими усилителями
- DRV8328 – 60 В, 1000/2000 мА, 3-фазный драйвер затвора
 напряжением 100 В и диодами начальной загрузки
напряжением 100 В и диодами начальной загрузкиИнтегрированные драйверы управления BLDC | TI.com
Наши бескодовые встроенные драйверы BLDC управляют вращением двигателей без внешнего микроконтроллера, используя встроенные функции управления, которые обеспечивают оптимальную эффективность в системах двигателей с датчиками и без датчиков. Наши драйверы управления имеют варианты для сенсорной ловушки, безсенсорной ловушки и безсенсорного FOC для удовлетворения требований вашего проекта, таких как точность контура скорости, акустические характеристики, надежный запуск и торможение, а также электромагнитные помехи / эффективность.
Рекомендуемые встроенные драйверы управления BLDC
Методы коммутации BLDC
Узнайте больше о методах коммутации BLDC
Чтобы сравнить различные типы методов коммутации трехфазного двигателя BLDC, необходимо учитывать множество соображений на системном уровне, включая конструкцию двигателя, тип применения, требования к производительности, сложность конструкции и многое другое.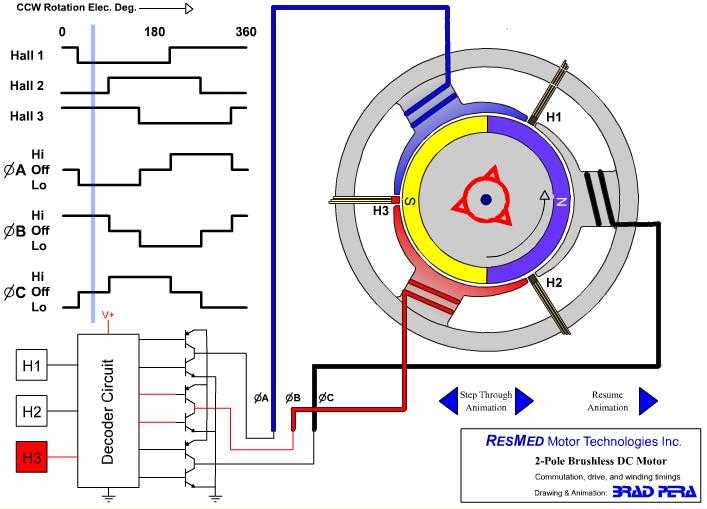 Посмотрите это видео и следующие вкладки, чтобы узнать больше о методах управления BLDC, их преимуществах и недостатках.
Посмотрите это видео и следующие вкладки, чтобы узнать больше о методах управления BLDC, их преимуществах и недостатках.
Узнайте больше о трапециевидной коммутации
Трапециевидная коммутация популярна благодаря своей простоте, низкой стоимости и надежности. Это самый простой в реализации метод коммутации по сравнению с синусоидальным и полевым управлением. Его простота сокращает время и стоимость разработки, особенно с точки зрения вычислительной мощности, используемой для алгоритмов управления.
Характеристики:
- Низкая стоимость
- Простота реализации
- Меньшая вычислительная мощность
- Подходит для высокоскоростных приложений
- Высокий электрический и акустический шум
- Большая пульсация крутящего момента
Узнайте больше о синусоидальной коммутации
В синусоидальных двигателях BLDC обмотки каждой фазы создают синусоидальное противоЭДС. Вы можете найти синусоидальное управление в скоростных приложениях, поскольку они требуют малошумной, плавной и эффективной работы двигателя.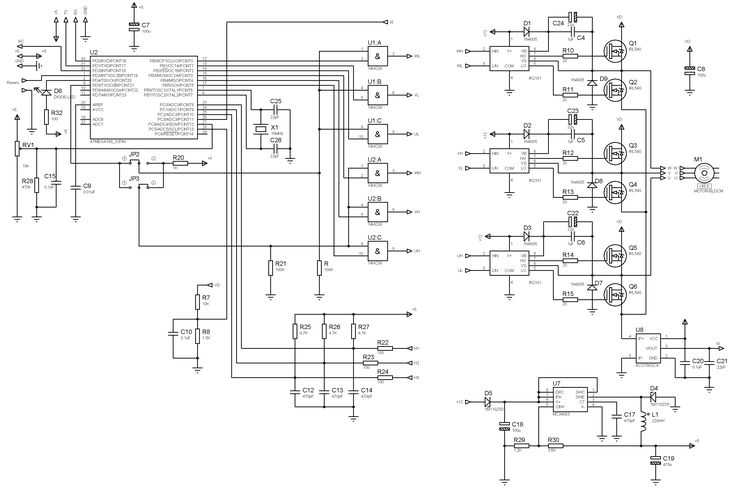
Характеристики:
- Бесшумный
- Высокоэффективный
- Малая пульсация крутящего момента
- Нет прямых измерений BEMF из-за отсутствия окна пересечения нуля
- Больше потерь при переключении по сравнению с трапециевидным
- Повышенная сложность
Узнайте больше об управляемой коммутации, ориентированной на поле
С помощью FOC мы можем добиться наименьшего звукового шума, наивысшего КПД двигателя и высокой скорости двигателя, используя расчеты в реальном времени, включая фазные токи двигателя и положение ротора, для приложения максимального крутящего момента. положения ротора.
Характеристики:
- Самый высокий крутящий момент и КПД двигателя
- Самый низкий слышимый шум и пульсация крутящего момента
- Высокая скорость двигателя + ослабление поля
- Высокие потери при переключении
- Комплексное управление и расчеты в реальном времени, необходимые от MCU
стрелка вправо
Читать статью
Узнайте больше о сенсорном управлении
В бессенсорном управлении датчики используются для определения фактического положения ротора относительно статора. Датчики могут использоваться в приложениях управления крутящим моментом, скоростью или положением. Основное преимущество использования датчиков заключается в том, что это недорогое и простое в реализации решение, которое мгновенно определяет положение двигателя даже на малых скоростях или в состоянии покоя.
Датчики могут использоваться в приложениях управления крутящим моментом, скоростью или положением. Основное преимущество использования датчиков заключается в том, что это недорогое и простое в реализации решение, которое мгновенно определяет положение двигателя даже на малых скоростях или в состоянии покоя.
Характеристики:
- Низкая стоимость
- Позиция известна сразу
- Обычно с низким разрешением
- Занимает место на плате или моторе
стрелка вправо
Читать статью
Узнайте больше о бездатчиковом управлении
Бездатчиковое управление потенциально может устранить необходимость во внешних датчиках за счет измерения обратной ЭДС при пересечении нуля или расчета противоЭДС, возникающей при коммутации. Как правило, бездатчиковое управление используется для скоростных приложений, поскольку двигатель будет генерировать достаточную противо-ЭДС, когда он вращается с постоянной скоростью.
Характеристики:
- Экономия места на плате за счет отсутствия датчиков
- Устраняет риск отказа датчиков
- Требуется дополнительная цепочка сигналов и расчеты
стрелка вправо
Читать статью
Откройте для себя рекомендуемые приложения
Вентиляторы для жилых и жилых помещений
Интегрированные управляющие приводы BLDC для обеспечения соответствия требованиям к шуму и эффективности, предъявляемым к вентиляторам для жилых и жилых помещений.
Вакуумный робот
Создавайте высокоскоростные и надежные вакуумные роботы с помощью наших встроенных драйверов двигателей постоянного тока, не требующих кода.
Модуль комфорта сидений
Ускорьте проектирование с помощью высокопроизводительных драйверов двигателей постоянного тока BLDC с экономичными и масштабируемыми решениями, обеспечивающими надежное и точное управление модулями комфорта с обратной связью.
Жидкостное охлаждение
Решение задач проектирования жидкостного охлаждения, включая постоянную скорость потока и адаптивную обработку нагрузки с помощью встроенных драйверов двигателей постоянного тока.
Драйверы BLDC с интегрированным управлением для удовлетворения требований к шуму и эффективности, необходимых для жилых помещений и вентиляторов.
Наш портфель интегрированных систем управления BLDC обеспечивает бесшумную работу вентилятора и предлагает гибкие методы управления для повышения эффективности вентилятора в различных условиях.
- Поддержка ветряных мельниц: определение начальной скорости (ISD) обеспечивает плавную синхронизацию вперед и назад, а активное торможение обеспечивает быстрое изменение направления вращения двигателя (< 1 с) без всплеска шины постоянного тока
- Быстрый запуск: обнаружение начальной скорости (ISD) включает повторную синхронизацию менее чем за 10 мс
- Тихая работа: компенсация мертвого времени и непрерывная ШИМ-модуляция
- Защита от скачков напряжения при изменении скорости вращения вентилятора: AVS контролирует напряжение двигателя с обратной ЭДС
Рекомендуемые ресурсы
ПРОДУКТЫ
- MCF8316A – макс. 40 В, пиковый ток 8 А, бездатчиковое управление FOC 3-фазный привод двигателя постоянного тока BLDC
РАЗРАБОТКА ОБОРУДОВАНИЯ
- MCF8316AEVM — MCF8316A трехфазный бездатчиковый модуль оценки драйвера двигателя постоянного тока FOC BLDC
Создавайте высокоскоростные и надежные вакуумные роботы с помощью наших встроенных драйверов двигателей постоянного тока, не требующих кодирования.
Наш портфолио драйверов BLDC с интегрированным управлением предлагает удобные варианты для соответствия различным требованиям к двигателям, таким как двигатели всасывания, щетки и двигатели для мытья полов.
- Высокая мощность всасывания (электрическая скорость до 3 кГц) и высокий пусковой крутящий момент позволяют вакууму поддерживать постоянную скорость независимо от состояния пола
- Минимальные потери мощности благодаря методам выпрямления ASR и AAR для предотвращения потерь мощности и рассеяния тепла
- Обнаружение блокировки для распознавания препятствия (носка) в щеточном стержне, которое заклинивает или блокирует вращение стержня
Рекомендуемые ресурсы
ПРОДУКТЫ
- MCT8316A – макс. 40 В, пиковый ток 8 А, бездатчиковое трапециевидное управление 3-фазный привод двигателя постоянного тока BLDC
- MCT8316Z — макс. 40 В, пиковый ток 8 А, трапециевидное управление с датчиком, 3-фазный привод двигателя постоянного тока BLDC
- MCF8316A — макс. 40 В, пиковый ток 8 А, бездатчиковое управление FOC, драйвер трехфазного двигателя постоянного тока BLDC
 40 В, пиковый ток 8 А, бездатчиковое управление FOC, драйвер трехфазного двигателя постоянного тока BLDC
40 В, пиковый ток 8 А, бездатчиковое управление FOC, драйвер трехфазного двигателя постоянного тока BLDCРАЗРАБОТКА АППАРАТНОГО ОБЕСПЕЧЕНИЯ
- MCT8316AEVM – Оценочный модуль MCT8316A для трехфазного бессенсорного привода трапециевидного двигателя постоянного тока
Ускорьте проектирование с помощью высокопроизводительных драйверов двигателей BLDC с экономичными и масштабируемыми решениями, обеспечивающими надежное и точное управление модулями комфорта с обратной связью.
Семейство драйверов BLDC со встроенным управлением масштабируется для модулей сидений с ограниченным пространством на плате и требует низкого уровня шума.
- Сведите к минимуму звуковой шум с помощью алгоритмов управления с ориентацией на поле (FOC) без использования кода без использования кода
- Масштабируемые драйверы трехфазных двигателей постоянного тока BLDC для диапазона мощности от 20 Вт до 70 Вт
- Минимальное пространство на плате благодаря встроенным функциям управления, полевого транзистора и защиты
Избранные ресурсы
ПРОДУКТЫ
- MCF8316A – макс. 40 В, пиковый ток 8 А, бездатчиковое управление FOC, драйвер 3-фазного двигателя постоянного тока BLDC
 40 В, пиковый ток 8 А, бездатчиковое управление FOC, драйвер 3-фазного двигателя постоянного тока BLDC
40 В, пиковый ток 8 А, бездатчиковое управление FOC, драйвер 3-фазного двигателя постоянного тока BLDCРАЗРАБОТКА АППАРАТНОГО ОБЕСПЕЧЕНИЯ
- MCF8316AEVM – MCF8316A трехфазный бессенсорный модуль оценки драйвера двигателя постоянного тока FOC
Решите проблемы проектирования жидкостного охлаждения, включая постоянную скорость потока и адаптивную обработку нагрузки с помощью встроенных драйверов двигателей BLDC.
Наш портфель драйверов BLDC с интегрированным управлением предлагает решения для приложений с динамическими нагрузками, поддерживая постоянную скорость во время работы с точностью контура скорости 1%.
Характеристики:
- Автоматически настраиваемый контур крутящего момента для компенсации динамических изменений нагрузки на систему жидкостного охлаждения во время работы
- Автоматически настраиваемый контур скорости для поддержания постоянной скорости потока и скорости двигателя
- Обнаружение исходного положения для преодоления высокого крутящего момента при запуске
- Низкий уровень акустического шума за счет включения компенсации мертвого времени и вставки
Рекомендуемые ресурсы
ПРОДУКЦИЯ
- MCF8316A – 40 В макс.