Содержание
цилиндрический линейный двигатель / Хабр
Источник картинки
Мы привыкли к тому, что в различных механических устройствах, требующих для своей работы электродвигатель, преобразование вращательного движения в необходимое рабочее — происходит с использованием множества промежуточных частей, что усложняет конструкцию, и уменьшает надёжность. Однако существует альтернатива и именно об этом мы и поговорим в этой статье.
Научно-технический прогресс, охватывающий одну сферу человеческой жизни за другой, постепенно видоизменял и способ передачи движения от электродвигателя. Если на станках начала прошлого века электродвигатель был один на всех и движение от него передавалась по валу через весь цех, с которого отдельные станки забирали необходимый вращательный момент с помощью ремённой передачи, —
то с ускорением прогресса, двигатель сначала переместился как можно ближе к конкретному станку, а потом и вовсе перешёл на каждый станок.
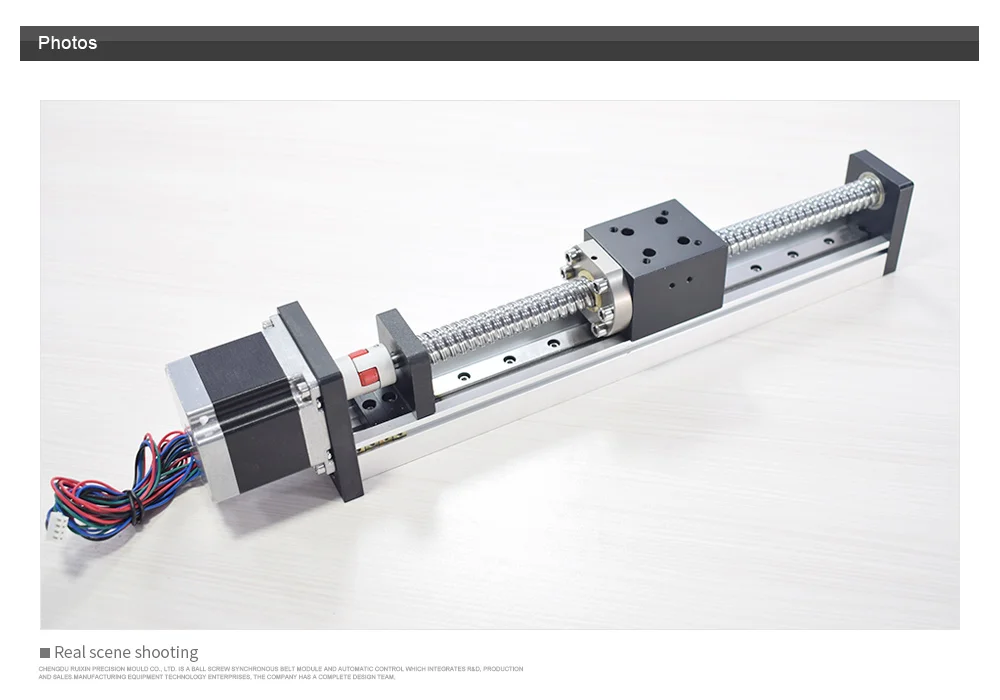
Претерпевали изменения и передаточные звенья от двигателя к станку. Например, широко распространились шарико-винтовые пары.
Источник: 3d-diy.ru
Причём шарико-винтовые пары только относительно недавно стали широкодоступными, их технология производства была достаточно отработана, а стоимость стала доступной для широкого круга потребителей. В свою очередь, разнообразные зубчатые передачи всегда были относительно доступными и широко применялись в различных схемах передачи движения. У зубчатых передач всегда была одна отрицательная сторона — довольно большой шум в работе и физический износ при трении зубьев друг о друга. Конечно, это можно несколько нивелировать тщательной смазкой, однако она притягивает к себе пыль, соринки, загрязняет рабочий редуктор (особенно если этот редуктор установлен на металлообрабатывающем станке).
Поэтому инженерная мысль искала какие-то другие решения, которые бы позволили избавиться от промежуточных звеньев. И такое решение было найдено — линейный электродвигатель!
Линейный двигатель — это электродвигатель, у которого статор и ротор «развёрнуты», таким образом, что вместо создания крутящего момента (вращения) — он создаёт линейную силу по всей своей длине.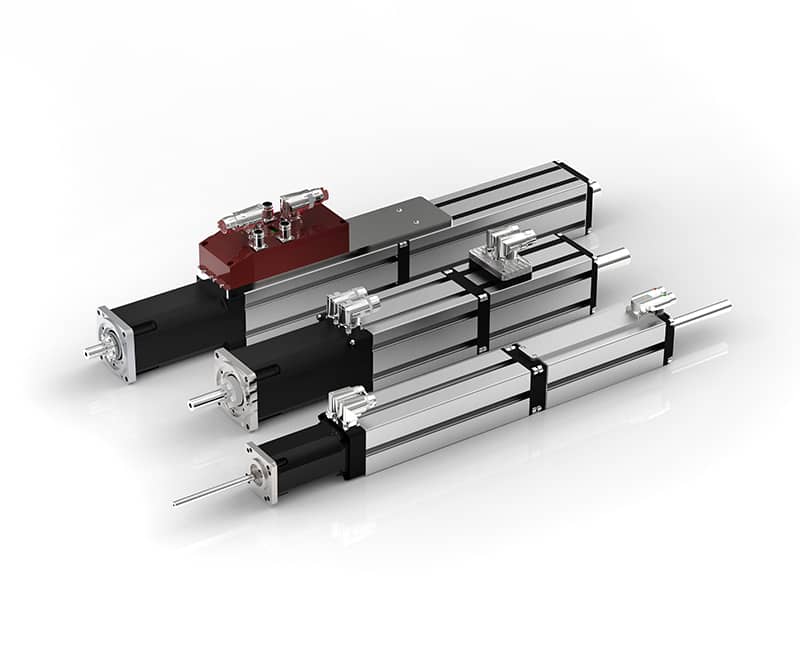
Автор: Schnibbi678 — Own work, CC BY-SA 3.0, Источник
Однако линейные двигатели не обязательно прямые:
Автор: Lutex (talk) — собственная работа, CC BY-SA 3.0, Источник
Характерно, что активная часть линейного двигателя имеет концы, в то время как более традиционные двигатели устроены в виде непрерывного контура.
Было предложено множество конструкций линейных двигателей, которые можно разделить на две основные категории:
- линейные двигатели с малым ускорением;
- линейные двигатели с высоким ускорением.
Линейные двигатели с низким ускорением подходят для поездов на магнитной подвеске и других наземных транспортных средств. Двигатели с низким ускорением, высокой скоростью и большой мощностью обычно представляют собой линейные синхронные двигатели. (LSM) с активной обмоткой на одной стороне воздушного зазора и массивом магнитов с чередующимися полюсами на другой стороне.
Линейные двигатели с высоким ускорением обычно довольно короткие и предназначены для ускорения объекта до очень высокой скорости, например, рельсотрон:
Линейные двигатели с высоким ускорением предлагались для ряда применений. Их рассматривали для использования в качестве оружия, поскольку современные бронебойные боеприпасы, как правило, состоят из небольших снарядов с очень высокой кинетической энергией, для которых подходят именно такие двигатели. Многие американские горки, запущенные в парках развлечений, теперь используют линейные асинхронные двигатели для движения поезда на высокой скорости.
Обычно они имеют конструкцию линейного асинхронного двигателя переменного тока (LIM) с активной трёхфазной обмоткой на одной стороне воздушного зазора и пластиной пассивного проводника на другой стороне. Тем не менее рельсотрон постоянного тока с униполярным линейным двигателем является ещё одной конструкцией линейного двигателя с высоким ускорением.
Высокоскоростные линейные двигатели сложно проектировать по ряду причин. Они требуют большого количества энергии в очень короткие промежутки времени. Одна конструкция ракетной установки требует 300 ГДж для каждого запуска в период менее секунды.
Обычные электрические генераторы не предназначены для такой нагрузки, но можно использовать методы краткосрочного накопления электроэнергии. Конденсаторы громоздки и дороги, но могут быстро поставить большое количество энергии. Униполярные генераторы можно использовать очень быстрого преобразования кинетической энергии маховика в электрическую энергию.
Линейные двигатели с высоким ускорением также требуют очень сильных магнитных полей и магнитные поля часто слишком сильны, чтобы можно было использовать сверхпроводники. Однако при тщательном проектировании это не должно быть серьёзной проблемой.
В данный момент применение линейных электродвигателей ещё не до конца отработано и поэтому их технологии изготовления, и стоимость оставляет желать лучшего. Однако, использование линейного двигателя позволяет реализовать такие заманчивые опции, как движение с высочайшей скоростью ( до 1,8 м/с и более!), практически без механического износа:
Однако, использование линейного двигателя позволяет реализовать такие заманчивые опции, как движение с высочайшей скоростью ( до 1,8 м/с и более!), практически без механического износа:
Однако не все двигатели так хороши, например, плоские линейные двигатели (схема которого приведена несколько выше).
Кроме сложности изготовления, они отличаются повышенным нагревом, причиной чего являются вихревые токи Фуко, что ещё усугубляется ограниченными возможностями по охлаждению двигателя, потому что, как правило, на них сверху смонтирован рабочий стол обрабатывающего станка. Так как многие промышленные станки, особенно металлообрабатывающие, имеют повышенные требования к жёсткости и точности конструкции (для обеспечения требуемой точности обработки), — такие двигатели вносят искажения в работу из-за температурного расширения конструкции благодаря нагреву в процессе, причём нагрев может достигать даже 100 градусов Цельсия!
Альтернативой плоскими линейным двигателям являются цилиндрические линейные двигатели. Они устроены следующим образом: цилиндрическая обмотка расположена вокруг сердечника, образованного из магнитов. То есть, катушка может перемещаться по этому сердечнику.
Они устроены следующим образом: цилиндрическая обмотка расположена вокруг сердечника, образованного из магнитов. То есть, катушка может перемещаться по этому сердечнику.
В отличие от плоского двигателя линейный двигатель достаточно эффективно охлаждается и поэтому не требует сложных и проблемных конструкций для охлаждения, а так как у него отсутствует сердечник, — отсутствует и потенциальный источник тепла под воздействием вихревых токов.
Благодаря отсутствию сердечника в конструкции цилиндрического двигателя,— он может работать очень плавно, без скачков скорости:
Другими словами, на основе линейных электрических двигателей возможно построение ультрапрецизионного оборудования.
Кроме того, из-за симметричной конструкции происходит более эффективное использование магнитного потока, что позволяет добиться большей эффективности, за счёт использования в 2 раза меньшего количества редкоземельных магнитов.
Как было уже сказано выше, износ двигателя такого типа при работе весьма несущественный, так как непосредственный физический контакт катушки и цилиндра-оси при работе практически отсутствует.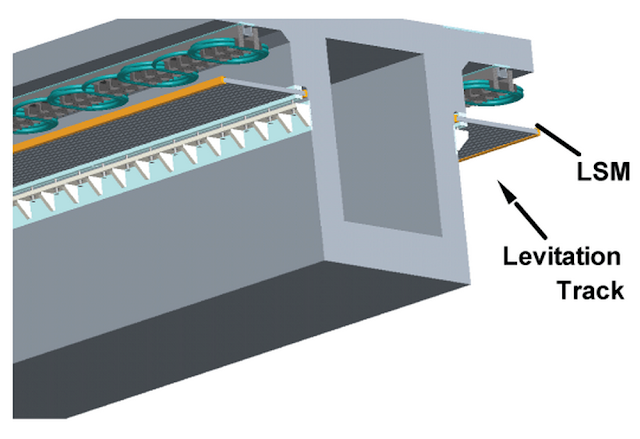
Принцип, на котором базируется работа линейных двигателей, заключается в проявлении силы, которая воздействует на проводник с током в магнитном поле, то есть на законе Ампера (исходя из которого можно сказать, что максимальное усилие, которое может развить двигатель – является произведением силы тока в обмотках на векторное произведение магнитной индукции поля на вектор длины провода в обмотках).
Источник: www.abamet.ru
Другими словами, можно сказать, что у обычного линейного двигателя примерно от 30 до 80% длины обмоток служит для протекания тока под прямым углом к вектору индукции поля, а оставшаяся часть обмоток, по сути, только тормозит движение. Но это касается только плоского двигателя! В отличие от него, устройство цилиндрического линейного двигателя позволяет практически на всей длине обмоток протекать току под оптимальным углом в 90 градусов.
Для тех, кто хочет попробовать собрать подобный двигатель для собственных нужд, — я прикладываю ниже ссылку на диссертацию «Конструкция и сборка прецизионного линейного двигателя и контроллера» (Design and Construction of a Precision Tubular Linear Motor and Controller, — Bryan Craig Murphy), где достаточно подробно разобрана теоретическая база такого двигателя: Ссылка на диссертацию.
Согласно пункту 1.4 этой диссертации «Предлагаемая конструкция» (Proposed Design), автор рассматривает устройство, в котором движется шток, а блок катушек остаётся неподвижным (хотя это не суть, вы понимаете, что при желании можно двигать или то или то, или «всё сразу и много» © 🙂 ): устройство состоит из массива магнитов внутри массива электромагнитных катушек.
Катушки разделены на три фазы: A, B и C. В каждой фазе по три катушки; центральная катушка каждой фазы обращена в направлении, противоположном двум внешним. Таким образом, когда ток проходит через фазу катушек, центральная катушка будет генерировать магнитное поле равное по величине каждой из других катушек в этой фазе, но в противоположном направлении.
Источник картинки: Диссертация «Design and Construction of a Precision Tubular Linear Motor and Controller, — Bryan Craig Murphy»
Как показано на рисунке выше, в двигателе используются цилиндрические постоянные магниты. Пары магнитов ориентированы в том же направлении и расположены напротив соседних пар магнитов.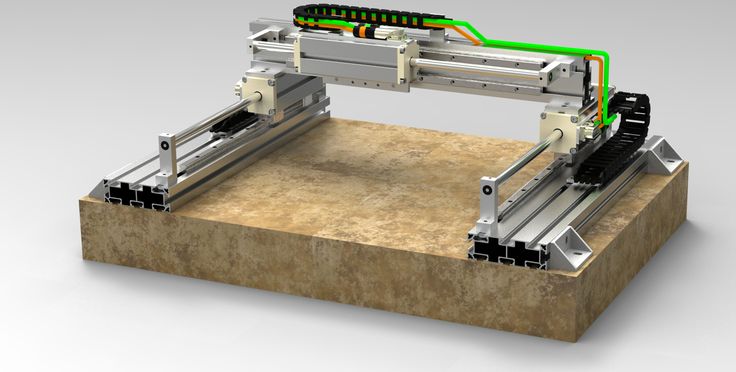 Алюминиевая прокладка помещается между парами противоположных магнитов для облегчения конструкции. Когда ток течёт по трём фазам катушек, катушки генерируют силы на постоянные магниты в соответствии с уравнением силы Лоренца.
Алюминиевая прокладка помещается между парами противоположных магнитов для облегчения конструкции. Когда ток течёт по трём фазам катушек, катушки генерируют силы на постоянные магниты в соответствии с уравнением силы Лоренца.
Самодельная конструкция, похожая на описанную (только всё наоборот — движется блок катушек) показана тут:
В своём нынешнем состоянии двигатель имеет время нарастания 55 мс, время установления 600 мс и перерегулирование 65 % при вводе с шагом в 1 см. Мотор способен выдержать максимальную осевую нагрузку в 26,4 Н. Эта максимальная сила значительно меньше, чем у коммерческих двигателей сопоставимого размера, однако эта конструкция позволяет более плавное позиционирование без эффекта «зубчатого колеса».
Работа заводского аппарата, примерно аналогичной конструкции, как в этой диссертации — показана на видео ниже:
Подытоживая, можно сказать, что широкое использование линейных двигателей только начинает свою жизнь, и каждый может попробовать собрать свою конструкцию. Тем более что благодаря своей простоте, — такой двигатель собирают даже энтузиасты. Для высокоточного движения в конструкции можно использовать датчики положения.
Тем более что благодаря своей простоте, — такой двигатель собирают даже энтузиасты. Для высокоточного движения в конструкции можно использовать датчики положения.
Как часть сервомеханизма, цилиндрические линейные двигатели могут обеспечить одновременное сочетание высокой тяги, высокой скорости и высокой точности, — далеко за пределами возможностей большинства других типов приводов.
Например, такие двигатели с некоторого времени стали устанавливать на 3d принтеры:
Теоретически, на цилиндрических линейных двигателях можно реализовать FDM 3d принтер, работающий на поразительных скоростях, очень точный, без вносимых стандартным передаточным трактом (зубчатые ремни, ШВП, винт/гайка и т.д) ошибок, если соответствующим образом позаботиться о высокопроизводительном экструдере и экстремально хорошем охлаждении — например, с применением охлаждающего потока воздуха в -50°C (используя трубку Ранка-Хилша).
Цилиндрические линейные двигатели на постоянных магнитах не следует путать с цилиндрическими линейными асинхронными двигателями, которые работают по другому принципу.
Линейный привод своими руками
Главная » Разное » Линейный привод своими руками
Самодельный электрический актуатор. Как сделать линейный актуатор (линейный привод) самому. | ДелайСам.Ру
Иногда в хозяйстве требуется сделать линейный привод. Т.е. что то не вращать и поворачивать, а перемещать линейно, причем порой на значительные расстояния. Обычно это делается при помощи линейного актуатора. Актуатор преобразует вращательное движение двигателя в линейное перемещение. Потребовалось подобное устройство и мне и я решил его сделать самостоятельно.
Обычно линейное перемещение осуществляют при помощи зубчатой рейки (это что то вроде шестерни, только развернутой в прямую линию). Иногда — при помощи т.н. ходового винта (его можно видеть в винтовых домкратах). Во втором случае наблюдается эффект большой редукции, поскольку на один оборот двигателя приходится всего один оборот винта, а перемещение равно шагу резьбы. Актуаторы с зубчатой рейкой быстрые, но не точные и слабые (усилие перемещения там равно усилию на ведущей шестерне двигателя). А актуаторы с ходовым винтом – это по сути домкраты с электроприводом. Точность их перемещения очень высокая (доли мм), усилие большое, а двигатель для привода требуется маломощный. Единственный их недостаток — они медленные (по сравнению с реечными). Зато их можно очень легко сделать самому в домашних условиях без какого либо особенного инструмента. Еще один их большой плюс — у них явно выраженный эффект самоторможения. Т.е. заставить актуатор перемещаться каким либо способом помимо вращения ходового винта невозможно. Это позволяет использовать винтовые актуаторы в электрических замках и запорах. Их невозможно открыть внешним воздействием (кроме разрушающего).
А актуаторы с ходовым винтом – это по сути домкраты с электроприводом. Точность их перемещения очень высокая (доли мм), усилие большое, а двигатель для привода требуется маломощный. Единственный их недостаток — они медленные (по сравнению с реечными). Зато их можно очень легко сделать самому в домашних условиях без какого либо особенного инструмента. Еще один их большой плюс — у них явно выраженный эффект самоторможения. Т.е. заставить актуатор перемещаться каким либо способом помимо вращения ходового винта невозможно. Это позволяет использовать винтовые актуаторы в электрических замках и запорах. Их невозможно открыть внешним воздействием (кроме разрушающего).
В продаже имеются резьбовые шпильки различного диаметра. Их и будем использовать в качестве ходового винта. Если требуется значительные усилия (например вы делаете актуатор для автоматического открывания ворот), то лучше взять шпильку с резьбой М16-М20. Она выдержит усилие в сотни килограмм. Для меньших нагрузок можно взять шпильки потоньше.
Разумеется потребуется и ответная часть для ходового винта – гайка. Лучше их взять несколько, что бы усилие передавалось на большую поверхность. Дело в том, что настоящие ходовые винты имеют трапециевидную и глубокую резьбу, закаленную поверхность. Резьбовая же шпилька сделана из мягкого металла, резьба у нее неглубокая и треугольной формы. Это же вызывает повышенное трение при вращении, поэтому ходовой винт из обычной резьбовой шпильки требует обильной и тщательной смазки и защиты от грязи.
Итак, приступаем к сборке линейного электрического актуатора. Необходимой деталью актуатора является и толкатель. Т.е. то, что собственно будет перемещаться. Лучше всего для этой роли подходит трубка, квадратная в сечении. Необходимо подобрать трубку такого размера, что бы гайки могли в нее войти. Например, для гаек резьбы М10 подойдет трубка 20 х 20 мм. У гаек необходимо сточить пару ребер, что они входили в трубку (на фото то, что надо сточить обозначено красным цветом). Делается это так. На шпильку накручиваем несколько гаек вплотную друг к другу, но без затягивания. Все гайки зажимаем в тисках и стачиваем ребра всех гаек. Затем перевернув все на 180 градусов, стачиваем противоположные ребра. В итоге, все гайки должны входить в трубку, но не должны в ней прокручиваться.
На шпильку накручиваем несколько гаек вплотную друг к другу, но без затягивания. Все гайки зажимаем в тисках и стачиваем ребра всех гаек. Затем перевернув все на 180 градусов, стачиваем противоположные ребра. В итоге, все гайки должны входить в трубку, но не должны в ней прокручиваться.
Теперь надо зафиксировать гайки внутри трубы, у самого ее конца. Проще всего это сделать с помощью эпоксидной смолы, она прекрасно склеивает металлы. Тщательно обезжириваем внутреннюю поверхность трубы и гайки. На шпильку наносим тонкий слой густой смазки (литол, солидол). Опять собираем гайки в «блок» на шпильке. Смазка должна заполнить зазоры между гайками, что бы туда не протекла эпоксидная смола. Смазкой надо замазать и торцы блока гаек. Вобщем надо максимально защитить резьбу от попадания на нее смолы. (Если вы знакомы со слесарным делом, возможно вам будет проще взять квадратный пруток, отрезать от него несколько сантиметров, просверлить вдоль и нарезать в нем резьбу под шпильку. Но я описываю процесс изготовления «из того что есть»).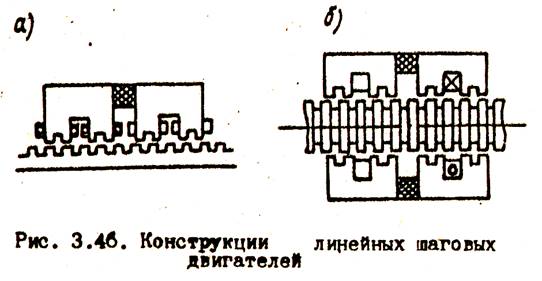
Приготовив эпоксидную смолу, аккуратно вклеиваем гайки внутрь квадратной трубы и даем смоле застыть. А пока займемся муфтой сцепления. Ведь шпильку должен вращать электродвигатель. Поскольку и шпилька и вал двигателя обычно круглые, проще всего сделать муфту из отрезков двух трубок, смежных по диаметру. Если диаметры сильно рознятся, можно использовать несколько трубок, набирая нужный диаметр.
Соединив муфту просверливаем сквозное отверстие под контровочный винт. Фиксируем одну часть сцепления на валу двигателя, вторую – ни конце резьбовой шпильки.
В качестве привода актуатора следует выбрать электродвигатель с редуктором, червячным или планетарным. Таких двигателей имеется огромное количество. Это моторчики привода стеклоочистителей автомобилей, электрических стеклоподъемников, всевозможные электрические отвертки (включая самые дешевые), шуруповерты и т.д. и т.д. Не считая специальных моторов-редукторов.
Вобщем привод — совершенно не дефицит. Главное, что бы на валу были не слишком высокие обороты (50-200 в минуту) и достаточное усилие для проворачивания резьбовой шпильки. В крайнем случае купите самую дешевую электрическую отвертку за 300-400 руб, она прекрасно будет работать. Разумеется, мощность двигателя должна соответствовать и задачам, возложенным на актуатор. Ворота отверткой трудно открывать… Я в данном примере использовал какой то моторчик неизвестного назначения. Но у него был червячный редуктор и полностью отсутствовал вал. Пришлось в отверстие шестерни вкрутить отрезок резьбовой шпильки и зафиксировать его самоконтрящимися гайками.
В крайнем случае купите самую дешевую электрическую отвертку за 300-400 руб, она прекрасно будет работать. Разумеется, мощность двигателя должна соответствовать и задачам, возложенным на актуатор. Ворота отверткой трудно открывать… Я в данном примере использовал какой то моторчик неизвестного назначения. Но у него был червячный редуктор и полностью отсутствовал вал. Пришлось в отверстие шестерни вкрутить отрезок резьбовой шпильки и зафиксировать его самоконтрящимися гайками.
Нам осталось изготовить для актуатора суппорт. Его размер определяется и назначением актуатора и размерами. В простейшем случае это может быть просто отрезок доски. Ее длина должна быть равной длине шпильки плюс место для двигателя.
Двигатель я закрепил с помощью монтажного уголка, саморезами. На противоположном конце суппорта установил направляющую муфту. Тоже из квадратной трубы, только смежного размера. Она же не дает подвижной трубе — толкателю проворачиваться вместе с вращающейся шпилькой. Эту муфту надо установить так, что бы труба – толкатель была параллельно плоскости суппорта.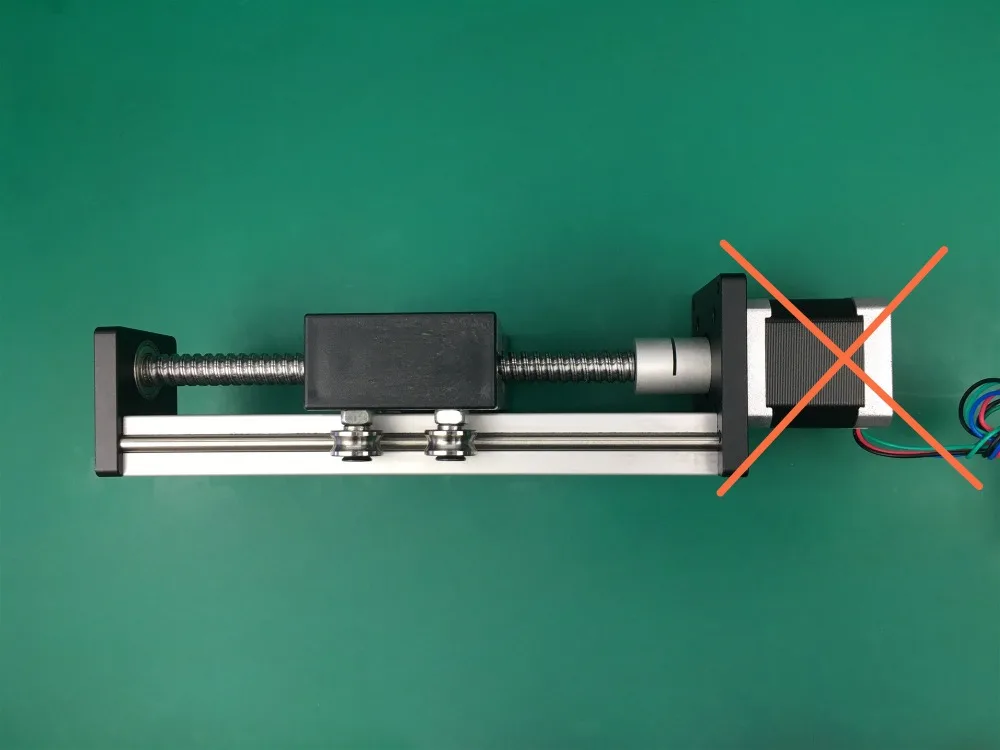 Хотя это не обязательно.
Хотя это не обязательно.
Вот практически и готов актуатор. Надо только соединить муфту сцепления. Если включить двигатель, то его вал начнет вращаться, и резьбовая шпилька тоже. Она будет или ввинчиваться или вывинчиваться из гаек, расположенных в трубе толкателе. Труба у нас не проворачивается из-за направляющей муфты. Поэтому труба толкатель или выдвигается за пределы суппорта, или втягивается назад, приближаясь к двигателю. Шпилька при этом уходит внутрь трубы – толкателя.
В моем случае я использовал метровые шпильку и трубу-толкатель. Из-за необходимости иметь запас по краям рабочего хода в несколько сантиметров, толкатель перемещается примерно на 850 миллиметров. Что меня более чем устроило (актуатор планировался для открывания фрамуги в теплице для ее проветривания). Тяговое усилие составило около 40 кг (больше просто нечем было мерить). Число оборотов двигателя было около 50/мин. Шаг резьбы 1,5 мм. Т.е. за минуту актуатор перемещался всего на 75 мм. Но проветривание теплицы — процесс не спешный.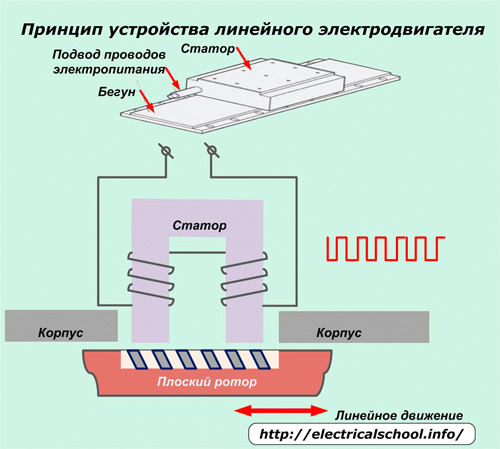
Актуатор изначально не имеет «тормозов». Т.е. если не выключать двигатель вовремя, то труба – толкатель или «свинтится» со шпильки совсем (и актуатор саморазберется). Или наоборот, упрется в сцепление, заклинит и тогда может сгореть двигатель. Поэтому если планируется работа актуатора от одного края до другого, для предотвращения подобных ситуаций надо сделать концевые выключатели.
В общем случае это могут быть механические выключатели. Для этого к трубе-толкатели крепят прочный «язычок», выступающий вбок. А на суппорте устанавливают пару концевых выключателей, которые разрывают электрическую цепь питания моторчика. Когда язычок нажмет на кнопку концевого выключателя в каком либо крайнем положении, мотор выключится.
Если планируется управление актуатором в автоматическом режиме, под управлением какого то контроллера, то логичнее его будет оснастить герконами, а на самом толкателе закрепить небольшой магнит. На фото – я использовал параллельно включенные несколько герконов (для надежности). Герконы позволят надежно сработать «тормозам» и не боятся ни влаги ни грязи. Герконы подают сигнал в контроллер о том, что актуатор в крайнем положении и надо выключить двигатель. Использование герконов хорошо еще в том плане, что с их помощью (если потребуется) можно знать и о промежуточных положениях актуатора, что он прошел (или проходит) какую то точку.
Герконы позволят надежно сработать «тормозам» и не боятся ни влаги ни грязи. Герконы подают сигнал в контроллер о том, что актуатор в крайнем положении и надо выключить двигатель. Использование герконов хорошо еще в том плане, что с их помощью (если потребуется) можно знать и о промежуточных положениях актуатора, что он прошел (или проходит) какую то точку.
Непрерывная и очень напряженная эксплуатация данного актуатора в теплице (высокая влажность и большие колебания температуры) показали абсолютную надежность конструкции. Никаких сбоев и замечаний выявлено не было. За лето пару раз наносил на шпильку по «чайной ложке» литола. Вот и все обслуживание. Управлялся как в ручном, так и в автоматическом режиме от температурного контроллера и просто от таймера. «Неспешность» и абсолютная прогнозируемость поведения актуатора позволяет точно рассчитывать время, в каком положении он окажется через некоторое время работы.
Себестоимость такого актуатора составила около 600 руб ($20) , включая покупку электромотора. Простота конструкции позволяет использовать ее как прототип для изготовления актуаторов всевозможного назначения и размеров.
Простота конструкции позволяет использовать ее как прототип для изготовления актуаторов всевозможного назначения и размеров.
Константин Тимошенко © 01.12.2011 г.
Электрический линейный привод: как сделать актуатор своими руками
Линейные приводы используются во всех современных крутых девайсах: 3Д-принтеры, лазерные резчики, ЧПУ. Одним из основных факторов, влияющих на стоимость линейных актуаторов, является линейная направляющая, которая состоит из компонентов, которые поддерживают прямой ход управляемой части устройства (например, набор точных стержней и линейных подшипников).
Цены на компоненты направляющих могут варьироваться от десятков до тысяч долларов в зависимости от их размера и точности. Один из способов обойти высокую стоимость этих компонентов — заменить их механизмом, который преобразует вращательное движение в прямолинейное. Механизм Саррюса, изобретенный в 1853 году Пьером Фредериком Саррюсом, как раз является одним из таких механизмов, которые могут обеспечить идеально ровное линейное движение, и для которых не нужны какие-либо справочные руководства.
В этом проекте для создания недорогого механизма Саррюса используются простые пластины, напечатанные на 3Д принтере или вырезанные лазером, а также пластиковые «живые» петли. Затем, чтобы заставить их двигаться, к ним добавляется шаговый двигатель NEMA 17 и резьбовой стержень. Длина хода привода в этом проекте составляет приблизительно 254 мм, но бОльшая или меньшая версия может быть выполнена путем простого изменения длины соединительных пластин.
Шаг 1: Материалы и приспособления
Материалы:
- Связующая пластина (4 штуки, напечатанные на 3Д-принтере или вырезанные лазером в Шаге 2)
- Пластина двигателя (1 штука, напечатанная на 3Д-принтере или вырезанная лазером в Шаге 2)
- Пластина привода (1 штука, напечатанная на 3Д-принтере или вырезанная лазером в Шаге 2)
- Пластиковые петли (6 штук, куплены мной в McMaster-Carr, парт-номер 1637A713)
- Винты с плоской головкой, резьба 6-32 x 9,5 мм длиной (24 штуки)
- Пресс-гайка, резьба 6-32 (1 упаковка из 25 штук, куплены мной в McMaster-Carr, парт-номер 94674A515)
- Винты с выемкой под шестигранник в головке, M3x0.
 5 x 12 мм длиной (2 штуки)
5 x 12 мм длиной (2 штуки) - Шестигранные гайки, M3x0.5 (2 штуки)
- Винты с выемкой под шестигранник в головке, M3x0.5 x 10 мм длиной (4 штуки)
- Муфта вала, 5 х 8 мм (1 штука)
- Шаговый мотор NEMA 17 с монтажными отверстиями с резьбой M3x0.5 (1 штука)
- Гайка Акме M8 (1 штука)
- Стержень с резьбой Акме M8, 300 мм длиной (1 штука)
 5 x 12 мм длиной (2 штуки)
5 x 12 мм длиной (2 штуки)Инструмент:
- Набор шестигранных ключей
- Отвертка
- Плоскогубцы
Используя прикреплённые файлы, напечатайте на 3Д-принтере, либо вырежьте на лазерном резчике следующие части:
- Связующая пластина (4 штуки)
- Пластина двигателя (1 штука)
- Пластина привода (1 штука)
Свои части я напечатал серым пластиком ABS. Если вы вырежете части лазером, то толщина их должна составить около 6.35 мм. В качестве материала подойдёт дерево, акрил, МДФ или любой другой схожий материал.
Я прикрепляю файлы формата STEP для тех из вас, кто хочет внести в проект свои изменения. Если вы планируете использовать этот электрический привод в реальной машине, вам, вероятно, потребуется добавить свои монтажные отверстия и/или увеличить/уменьшить длину соединительных пластин в соответствии с вашими нуждами.
Если вы планируете использовать этот электрический привод в реальной машине, вам, вероятно, потребуется добавить свои монтажные отверстия и/или увеличить/уменьшить длину соединительных пластин в соответствии с вашими нуждами.
Файлы
Шаг 3: Вставляем пресс-шайбы
Вставьте шайбы в связующие, пластину двигателя и привода. Обратите внимание на ориентацию пластин двигателя и привода.
Шаг 4: Установите на связующие пластины петли
Установите петли согласно фотографиям и прочно закрепите их четырьмя винтами с плоской головкой. Не сорвите резьбу слишком большим давлением.
Повторите процедуру и соедините петлёй две оставшиеся связующие пластины. У вас должно получиться два набора соединённых пластин.
Шаг 5: Установите петли на двигатель
Расположите пластину двигателя и два набора связующих как показано на фото. Установите две петли при помощи восьми винтов с плоской головкой.
Шаг 6: Установите петли привода
Расположите пластину привода и связующие пластины как показано на фото. Установите две пластиковые петли при помощи восьми винтов с плоской головкой.
Установите две пластиковые петли при помощи восьми винтов с плоской головкой.
Шаг 7: Устанавливаем гайку Акме
Вставьте два винта с выемкой под шестигранник M3 x 12 мм сквозь связующее привода, как показано на картинке. Опустите на них гайку Акме. Закрутите две шестигранных гайки M3 поверх винтов. Переверните пластину привода. Затяните винты, удерживая гайки плоскогубцами и поворачивая винты подходящим шестигранным ключом.
Шаг 8: Прикрепите шаговый двигатель
На связующее двигателя при помощи четырёх винтов с выемкой под шестигранник M3 x 10 прикрепите шаговый двигатель.
Шаг 9: Прикрепляем муфту вала
Оденьте на вал двигателя 5-миллиметровую муфту вала, затяните винты шестигранным ключом.
Шаг 10: Установите стержень с резьбой Акме
Вкрутите стержень в гайку Акме примерно наполовину. Согните механизм Саррюса таким образом, чтобы вы смогли продеть стержень с резьбой в муфту вала. Затяните винты на муфте вала подходящим шестигранным ключом.
Шаг 11: Запустите механизм
Сборка линейного электропривода своими руками подошла к концу! Теперь осталось лишь подключить шаговый двигатель к контроллеру, и механизм придёт в движение.
Актуатор. Как сделать простой самодельный линейный актуатор. Двигатель для линейного перемещения. | ДелайСам.Ру
При изготовлении различных устройств для дома или дачи, иногда возникает проблема в автоматическом линейном перемещении какого либо предмета или детали. Например — автоматическое открывание дверей или ворот, Автоматическое запирание — отпирание дверей, изменение положения зеркала концентрирующего солнечного коллектора. Или изменение положения антенны спутникового телевидения. (В этом случае не придется ставить несколько антенн на каждый спутник, а просто поворачивать одну антенну на выбранный спутник). Вобщем, стоит задача получить линейное перемещение деталей.
Эту задачу решают с помощью актуаторов. Что такое – Актуатор? Да вобщем то устройство предназначенное для реализации линейного перемещения, обычно путем преобразования вращательного движения в поступательное.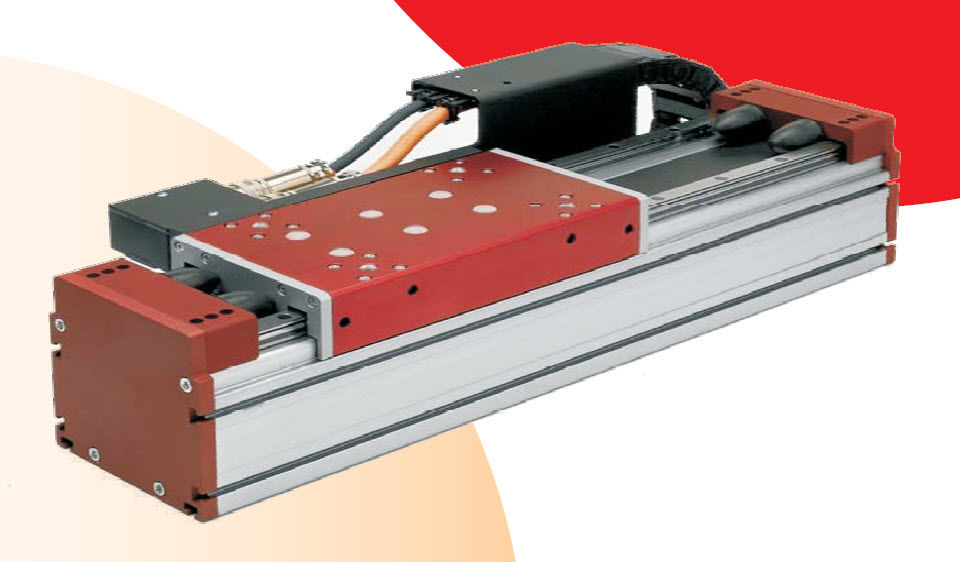 Электродвигатели — чрезвычайно дешевы и распространены. Но они могут только вращать свой вал. Реверсивные — в обе стороны в зависимости от подключения. Им легко управлять. А актуаторы — способны преобразовать вращательное движение вала электродвигателя в возвратно поступательное. Кроме этого, актуаторы, как правило значительно увеличивают силу тяги, поскольку являются своего рода понижающими редукторами.
Электродвигатели — чрезвычайно дешевы и распространены. Но они могут только вращать свой вал. Реверсивные — в обе стороны в зависимости от подключения. Им легко управлять. А актуаторы — способны преобразовать вращательное движение вала электродвигателя в возвратно поступательное. Кроме этого, актуаторы, как правило значительно увеличивают силу тяги, поскольку являются своего рода понижающими редукторами.
Простейший актуатор — это автомобильный винтовой домкрат. Вращая его винт, мы вызываем линейное перемещение опорной площадки домкрата. По такому принципу делается подавляющее большинство линейных актуаторов. В этой статье рассматриваются несколько конструкций самодельных актуаторов.
Актуатор 1:
Конструкция актуатора понятна из эскиза. На вал реверсивного электродвигателя (через переходник) крепится резьбовая шпилька. Длина этой шпильки будет определять и рабочий ход актуатора. Если шпилька длинная, то противоположные ее конец закрепляется в опорной муфте, желательно с подшипником.
На резьбовую шпильку, которая служит продолжением вала электродвигателя, навинчена гайка. К гайке приварен (приклеен, припаян) держатель толкателя, который в свою очередь так же пропущен через опорные муфты. Этот же толкатель не дает гайке проворачиваться при вращении вала – шпильки. Соответственно, если двигатель будет работать, то гайка будет перемещаться по резьбе вдоль всего вала – шпильки. Направление перемещения задается направлением вращения вала. Одновременно с ней будет перемещаться и толкатель актуатора.
Актуатор 2:
В качестве толкателя можно использовать и трубку, разместив гайку непосредственно в ней. В этом случае, вал – резьбовая шпилька помещается внутри трубы. Гайка вваривается, вклеивается или впаивается в торец трубы. После чего труба навинчивается на вал – шпильку. Если вал достаточно длинный, но на его конец надевают центрирующую шайбу. Торец трубы глушат каким либо наконечником для крепления к другим деталям. Кроме того, этот же наконечник выполняет важную функцию, предотвращая проворот трубки при вращении вала.
Если вал начнет вращаться, то гайка, лишенная возможности поворачиваться , начнет перемещаться вдоль шпильки – вала, увлекая за собой и трубку – толкатель.
Обе конструкции достаточно просты, но имеют существенный недостаток. Для большого линейного перемещения им требуются не менее длинные валы. Сами резьбовые шпильки весьма не дороги и доступны, однако все это увеличивает размеры актуатора. Поэтому есть смысл рассмотреть еще один вариант.
Актуатор 3:
В этом варианте используется пара шестеренок (можно использовать и червячную или клиноременную передачу, или фрикционную передачу). Ведущая шестерня закреплена на валу электродвигателя, а ведомая — на полой (трубчатой) оси, зажатой в опорах с шарикоподшипниками. Внутри полой оси располагается гайка, в которую вкручивается и резьбовая шпилька. Она же выполняет и роль толкателя.
При вращении двигателя шестерни тоже начинают вращаться, и поскольку гайка не имеет возможности перемещаться линейно, то перемещается шпилька – толкатель, ввинченная в нее. Разумеется при отсутствии проворота.
Разумеется при отсутствии проворота.
Такая конструкция актуатора проще, может иметь очень длинный толкатель и даже в виде гибкого вала или тяги. Но она требует пару шестерней и довольно замысловатого закрепления одной из них.
Приведенные варианты самодельных актуаторов – не единственные. Если вам удасться добыть зубчатую рейку, то реализовать актуатор можно довольно просто, сделав линейную червячную передачу. Например – так реализованы актуаторы, которые закрывают замки в автомобильных дверях. Усилья там не большие и все шестерни – пластиковые. Однако по настоящему длинные металлические зубчатые рейки — довольно редки и дороги. Поэтому проще всего сделать самодельный актуатор именно на основе гайки и резьбовой шпильки.
Константин Тимошенко (с) 10.01.2009
Вопросы на форуме…
Недорогой линейный актуатор – привод, основанный на механизме Саррюса
Линейные приводы используются во всех современных крутых девайсах: 3Д-принтеры, лазерные резчики, ЧПУ.:quality(80)/images.vogel.de/vogelonline/bdb/1097400/1097457/original.jpg) Одним из основных факторов, влияющих на стоимость линейных актуаторов, является линейная направляющая, которая состоит из компонентов, которые поддерживают прямой ход управляемой части устройства (например, набор точных стержней и линейных подшипников).
Одним из основных факторов, влияющих на стоимость линейных актуаторов, является линейная направляющая, которая состоит из компонентов, которые поддерживают прямой ход управляемой части устройства (например, набор точных стержней и линейных подшипников).
Цены на компоненты направляющих могут варьироваться от десятков до тысяч долларов в зависимости от их размера и точности. Один из способов обойти высокую стоимость этих компонентов — заменить их механизмом, который преобразует вращательное движение в прямолинейное. Механизм Саррюса, изобретенный в 1853 году Пьером Фредериком Саррюсом, как раз является одним из таких механизмов, которые могут обеспечить идеально ровное линейное движение, и для которых не нужны какие-либо справочные руководства.
В этом проекте для создания недорогого механизма Саррюса используются простые пластины, напечатанные на 3Д принтере или вырезанные лазером, а также пластиковые «живые» петли. Затем, чтобы заставить их двигаться, к ним добавляется шаговый двигатель NEMA 17 и резьбовой стержень. Длина хода привода в этом проекте составляет приблизительно 254 мм, но бОльшая или меньшая версия может быть выполнена путем простого изменения длины соединительных пластин.
Длина хода привода в этом проекте составляет приблизительно 254 мм, но бОльшая или меньшая версия может быть выполнена путем простого изменения длины соединительных пластин.
Шаг 1: Материалы и приспособления
Материалы:
- Связующая пластина (4 штуки, напечатанные на 3Д-принтере или вырезанные лазером в Шаге 2)
- Пластина двигателя (1 штука, напечатанная на 3Д-принтере или вырезанная лазером в Шаге 2)
- Пластина привода (1 штука, напечатанная на 3Д-принтере или вырезанная лазером в Шаге 2)
- Пластиковые петли (6 штук, куплены мной в McMaster-Carr, парт-номер 1637A713)
- Винты с плоской головкой, резьба 6-32 x 9,5 мм длиной (24 штуки)
- Пресс-гайка, резьба 6-32 (1 упаковка из 25 штук, куплены мной в McMaster-Carr, парт-номер 94674A515)
- Винты с выемкой под шестигранник в головке, M3x0.5 x 12 мм длиной (2 штуки)
- Шестигранные гайки, M3x0.5 (2 штуки)
- Винты с выемкой под шестигранник в головке, M3x0.5 x 10 мм длиной (4 штуки)
- Муфта вала, 5 х 8 мм (1 штука)
- Шаговый мотор NEMA 17 с монтажными отверстиями с резьбой M3x0. 5 (1 штука)
- Гайка Акме M8 (1 штука)
- Стержень с резьбой Акме M8, 300 мм длиной (1 штука)
 5 (1 штука)
5 (1 штука)Инструмент:
- Набор шестигранных ключей
- Отвертка
- Плоскогубцы
Шаг 2: Печатаем или вырезаем связующие
Используя прикреплённые файлы, напечатайте на 3Д-принтере, либо вырежьте на лазерном резчике следующие части:
- Связующая пластина (4 штуки)
- Пластина двигателя (1 штука)
- Пластина привода (1 штука)
Свои части я напечатал серым пластиком ABS. Если вы вырежете части лазером, то толщина их должна составить около 6.35 мм. В качестве материала подойдёт дерево, акрил, МДФ или любой другой схожий материал.
Я прикрепляю файлы формата STEP для тех из вас, кто хочет внести в проект свои изменения. Если вы планируете использовать этот электрический привод в реальной машине, вам, вероятно, потребуется добавить свои монтажные отверстия и/или увеличить/уменьшить длину соединительных пластин в соответствии с вашими нуждами.
Файлы
- Linkage_Plate.STEP
- Linkage_Plate.STL
- Linkage_Plate.DXF
- Motor_Plate.STEP
- Motor_Plate.STL
- Motor_Plate.DXF
- Actuator_Plate.STEP
- Actuator_Plate.STL
- Actuator_Plate.DXF
Шаг 3: Вставляем пресс-шайбы
Вставьте шайбы в связующие, пластину двигателя и привода. Обратите внимание на ориентацию пластин двигателя и привода.
Шаг 4: Установите на связующие пластины петли
Установите петли согласно фотографиям и прочно закрепите их четырьмя винтами с плоской головкой. Не сорвите резьбу слишком большим давлением.
Повторите процедуру и соедините петлёй две оставшиеся связующие пластины. У вас должно получиться два набора соединённых пластин.
Шаг 5: Установите петли на двигатель
Расположите пластину двигателя и два набора связующих как показано на фото. Установите две петли при помощи восьми винтов с плоской головкой.
Шаг 6: Установите петли привода
Расположите пластину привода и связующие пластины как показано на фото.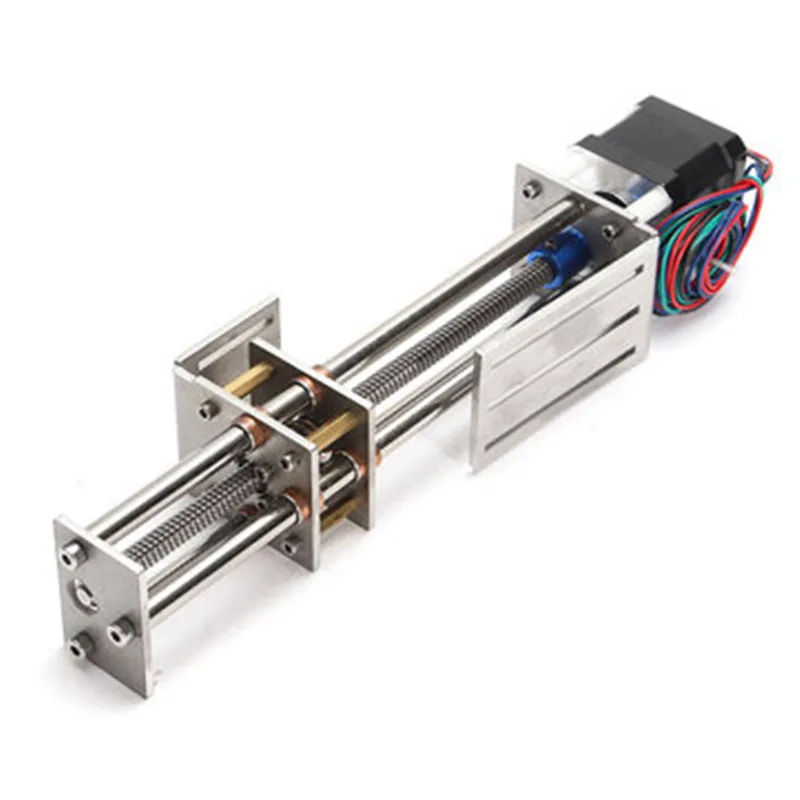 Установите две пластиковые петли при помощи восьми винтов с плоской головкой.
Установите две пластиковые петли при помощи восьми винтов с плоской головкой.
Шаг 7: Устанавливаем гайку Акме
Вставьте два винта с выемкой под шестигранник M3 x 12 мм сквозь связующее привода, как показано на картинке. Опустите на них гайку Акме. Закрутите две шестигранных гайки M3 поверх винтов. Переверните пластину привода. Затяните винты, удерживая гайки плоскогубцами и поворачивая винты подходящим шестигранным ключом.
Шаг 8: Прикрепите шаговый двигатель
На связующее двигателя при помощи четырёх винтов с выемкой под шестигранник M3 x 10 прикрепите шаговый двигатель.
Шаг 9: Прикрепляем муфту вала
Оденьте на вал двигателя 5-миллиметровую муфту вала, затяните винты шестигранным ключом.
Шаг 10: Установите стержень с резьбой Акме
Вкрутите стержень в гайку Акме примерно наполовину. Согните механизм Саррюса таким образом, чтобы вы смогли продеть стержень с резьбой в муфту вала. Затяните винты на муфте вала подходящим шестигранным ключом.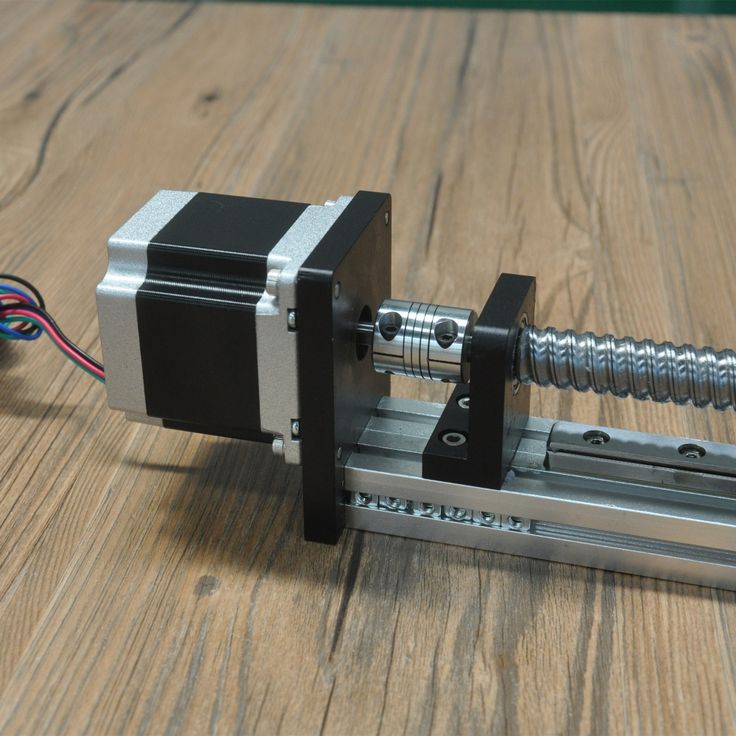
Шаг 11: Запустите механизм
Сборка линейного электропривода своими руками подошла к концу! Теперь осталось лишь подключить шаговый двигатель к контроллеру, и механизм придёт в движение.
Самодельный электрический актуатор. Как сделать линейный актуатор (линейный привод) самому.
Иногда в хозяйстве требуется сделать линейный привод. Т.е. что то не вращать и поворачивать, а перемещать линейно, причем порой на значительные расстояния. Обычно это делается при помощи линейного актуатора. Актуатор преобразует вращательное движение двигателя в линейное перемещение. Потребовалось подобное устройство и мне и я решил его сделать самостоятельно.
Обычно линейное перемещение осуществляют при помощи зубчатой рейки (это что то вроде шестерни, только развернутой в прямую линию). Иногда — при помощи т.н. ходового винта (его можно видеть в винтовых домкратах). Во втором случае наблюдается эффект большой редукции, поскольку на один оборот двигателя приходится всего один оборот винта, а перемещение равно шагу резьбы.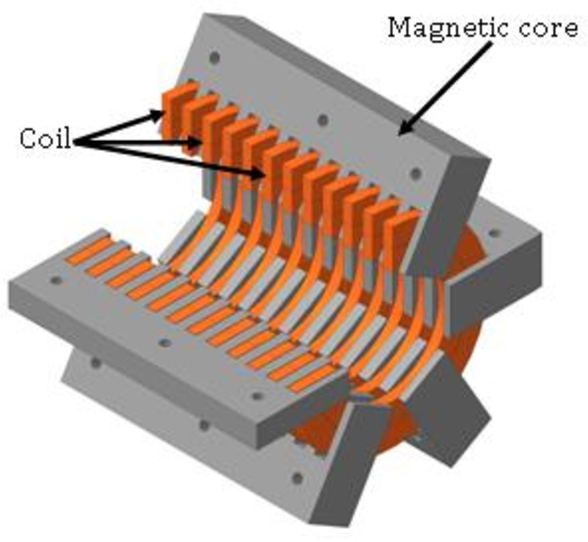 Актуаторы с зубчатой рейкой быстрые, но не точные и слабые (усилие перемещения там равно усилию на ведущей шестерне двигателя). А актуаторы с ходовым винтом – это по сути домкраты с электроприводом. Точность их перемещения очень высокая (доли мм), усилие большое, а двигатель для привода требуется маломощный. Единственный их недостаток — они медленные (по сравнению с реечными). Зато их можно очень легко сделать самому в домашних условиях без какого либо особенного инструмента. Еще один их большой плюс — у них явно выраженный эффект самоторможения. Т.е. заставить актуатор перемещаться каким либо способом помимо вращения ходового винта невозможно. Это позволяет использовать винтовые актуаторы в электрических замках и запорах. Их невозможно открыть внешним воздействием (кроме разрушающего).
Актуаторы с зубчатой рейкой быстрые, но не точные и слабые (усилие перемещения там равно усилию на ведущей шестерне двигателя). А актуаторы с ходовым винтом – это по сути домкраты с электроприводом. Точность их перемещения очень высокая (доли мм), усилие большое, а двигатель для привода требуется маломощный. Единственный их недостаток — они медленные (по сравнению с реечными). Зато их можно очень легко сделать самому в домашних условиях без какого либо особенного инструмента. Еще один их большой плюс — у них явно выраженный эффект самоторможения. Т.е. заставить актуатор перемещаться каким либо способом помимо вращения ходового винта невозможно. Это позволяет использовать винтовые актуаторы в электрических замках и запорах. Их невозможно открыть внешним воздействием (кроме разрушающего).
В продаже имеются резьбовые шпильки различного диаметра. Их и будем использовать в качестве ходового винта. Если требуется значительные усилия (например вы делаете актуатор для автоматического открывания ворот), то лучше взять шпильку с резьбой М16-М20. Она выдержит усилие в сотни килограмм. Для меньших нагрузок можно взять шпильки потоньше.
Она выдержит усилие в сотни килограмм. Для меньших нагрузок можно взять шпильки потоньше.
Разумеется потребуется и ответная часть для ходового винта – гайка. Лучше их взять несколько, что бы усилие передавалось на большую поверхность. Дело в том, что настоящие ходовые винты имеют трапециевидную и глубокую резьбу, закаленную поверхность. Резьбовая же шпилька сделана из мягкого металла, резьба у нее неглубокая и треугольной формы. Это же вызывает повышенное трение при вращении, поэтому ходовой винт из обычной резьбовой шпильки требует обильной и тщательной смазки и защиты от грязи.
Итак, приступаем к сборке линейного электрического актуатора. Необходимой деталью актуатора является и толкатель. Т.е. то, что собственно будет перемещаться. Лучше всего для этой роли подходит трубка, квадратная в сечении. Необходимо подобрать трубку такого размера, что бы гайки могли в нее войти. Например, для гаек резьбы М10 подойдет трубка 20 х 20 мм. У гаек необходимо сточить пару ребер, что они входили в трубку (на фото то, что надо сточить обозначено красным цветом). Делается это так. На шпильку накручиваем несколько гаек вплотную друг к другу, но без затягивания. Все гайки зажимаем в тисках и стачиваем ребра всех гаек. Затем перевернув все на 180 градусов, стачиваем противоположные ребра. В итоге, все гайки должны входить в трубку, но не должны в ней прокручиваться.
У гаек необходимо сточить пару ребер, что они входили в трубку (на фото то, что надо сточить обозначено красным цветом). Делается это так. На шпильку накручиваем несколько гаек вплотную друг к другу, но без затягивания. Все гайки зажимаем в тисках и стачиваем ребра всех гаек. Затем перевернув все на 180 градусов, стачиваем противоположные ребра. В итоге, все гайки должны входить в трубку, но не должны в ней прокручиваться.
Теперь надо зафиксировать гайки внутри трубы, у самого ее конца. Проще всего это сделать с помощью эпоксидной смолы, она прекрасно склеивает металлы. Тщательно обезжириваем внутреннюю поверхность трубы и гайки. На шпильку наносим тонкий слой густой смазки (литол, солидол). Опять собираем гайки в «блок» на шпильке. Смазка должна заполнить зазоры между гайками, что бы туда не протекла эпоксидная смола. Смазкой надо замазать и торцы блока гаек. Вобщем надо максимально защитить резьбу от попадания на нее смолы.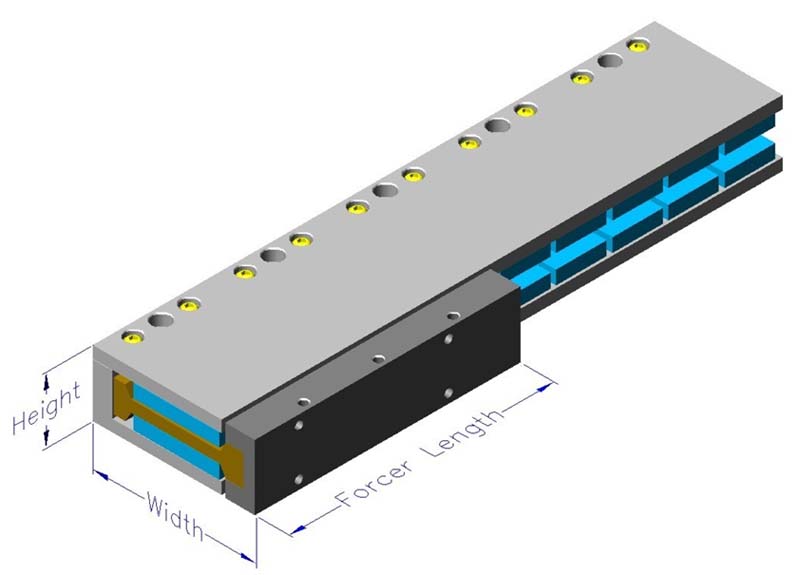 (Если вы знакомы со слесарным делом, возможно вам будет проще взять квадратный пруток, отрезать от него несколько сантиметров, просверлить вдоль и нарезать в нем резьбу под шпильку. Но я описываю процесс изготовления «из того что есть»).
(Если вы знакомы со слесарным делом, возможно вам будет проще взять квадратный пруток, отрезать от него несколько сантиметров, просверлить вдоль и нарезать в нем резьбу под шпильку. Но я описываю процесс изготовления «из того что есть»).
Приготовив эпоксидную смолу, аккуратно вклеиваем гайки внутрь квадратной трубы и даем смоле застыть. А пока займемся муфтой сцепления. Ведь шпильку должен вращать электродвигатель. Поскольку и шпилька и вал двигателя обычно круглые, проще всего сделать муфту из отрезков двух трубок, смежных по диаметру. Если диаметры сильно рознятся, можно использовать несколько трубок, набирая нужный диаметр.
Соединив муфту просверливаем сквозное отверстие под контровочный винт. Фиксируем одну часть сцепления на валу двигателя, вторую – ни конце резьбовой шпильки.
В качестве привода актуатора следует выбрать электродвигатель с редуктором, червячным или планетарным. Таких двигателей имеется огромное количество. Это моторчики привода стеклоочистителей автомобилей, электрических стеклоподъемников, всевозможные электрические отвертки (включая самые дешевые), шуруповерты и т.д. и т.д. Не считая специальных моторов-редукторов.
Таких двигателей имеется огромное количество. Это моторчики привода стеклоочистителей автомобилей, электрических стеклоподъемников, всевозможные электрические отвертки (включая самые дешевые), шуруповерты и т.д. и т.д. Не считая специальных моторов-редукторов.
Вобщем привод — совершенно не дефицит. Главное, что бы на валу были не слишком высокие обороты (50-200 в минуту) и достаточное усилие для проворачивания резьбовой шпильки. В крайнем случае купите самую дешевую электрическую отвертку за 300-400 руб, она прекрасно будет работать. Разумеется, мощность двигателя должна соответствовать и задачам, возложенным на актуатор. Ворота отверткой трудно открывать… Я в данном примере использовал какой то моторчик неизвестного назначения. Но у него был червячный редуктор и полностью отсутствовал вал. Пришлось в отверстие шестерни вкрутить отрезок резьбовой шпильки и зафиксировать его самоконтрящимися гайками.
Нам осталось изготовить для актуатора суппорт. Его размер определяется и назначением актуатора и размерами. В простейшем случае это может быть просто отрезок доски. Ее длина должна быть равной длине шпильки плюс место для двигателя.
Двигатель я закрепил с помощью монтажного уголка, саморезами. На противоположном конце суппорта установил направляющую муфту. Тоже из квадратной трубы, только смежного размера. Она же не дает подвижной трубе — толкателю проворачиваться вместе с вращающейся шпилькой. Эту муфту надо установить так, что бы труба – толкатель была параллельно плоскости суппорта. Хотя это не обязательно.
Вот практически и готов актуатор. Надо только соединить муфту сцепления. Если включить двигатель, то его вал начнет вращаться, и резьбовая шпилька тоже. Она будет или ввинчиваться или вывинчиваться из гаек, расположенных в трубе толкателе. Труба у нас не проворачивается из-за направляющей муфты..jpg) Поэтому труба толкатель или выдвигается за пределы суппорта, или втягивается назад, приближаясь к двигателю. Шпилька при этом уходит внутрь трубы – толкателя.
Поэтому труба толкатель или выдвигается за пределы суппорта, или втягивается назад, приближаясь к двигателю. Шпилька при этом уходит внутрь трубы – толкателя.
В моем случае я использовал метровые шпильку и трубу-толкатель. Из-за необходимости иметь запас по краям рабочего хода в несколько сантиметров, толкатель перемещается примерно на 850 миллиметров. Что меня более чем устроило (актуатор планировался для открывания фрамуги в теплице для ее проветривания). Тяговое усилие составило около 40 кг (больше просто нечем было мерить). Число оборотов двигателя было около 50/мин. Шаг резьбы 1,5 мм. Т.е. за минуту актуатор перемещался всего на 75 мм. Но проветривание теплицы — процесс не спешный.
Актуатор изначально не имеет «тормозов». Т.е. если не выключать двигатель вовремя, то труба – толкатель или «свинтится» со шпильки совсем (и актуатор саморазберется). Или наоборот, упрется в сцепление, заклинит и тогда может сгореть двигатель.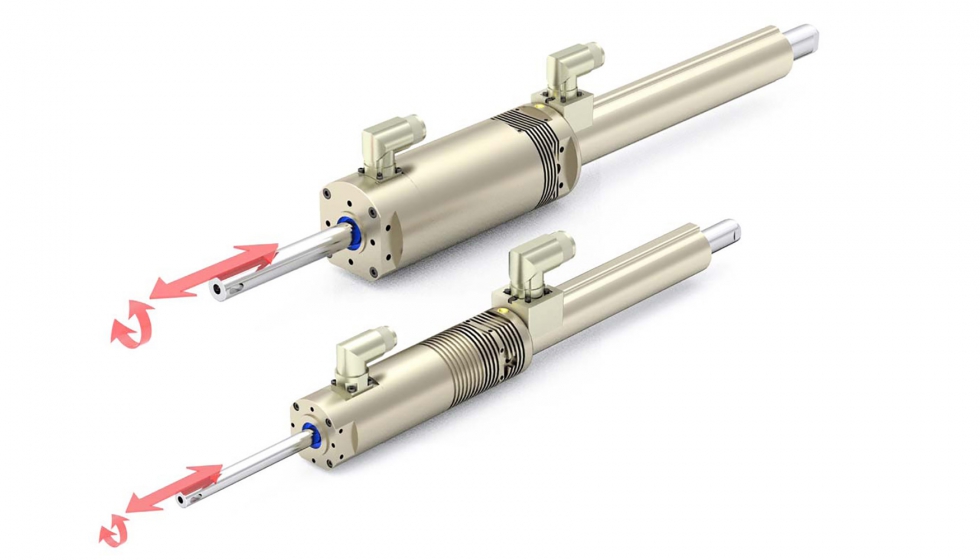 Поэтому если планируется работа актуатора от одного края до другого, для предотвращения подобных ситуаций надо сделать концевые выключатели.
Поэтому если планируется работа актуатора от одного края до другого, для предотвращения подобных ситуаций надо сделать концевые выключатели.
В общем случае это могут быть механические выключатели. Для этого к трубе-толкатели крепят прочный «язычок», выступающий вбок. А на суппорте устанавливают пару концевых выключателей, которые разрывают электрическую цепь питания моторчика. Когда язычок нажмет на кнопку концевого выключателя в каком либо крайнем положении, мотор выключится.
Если планируется управление актуатором в автоматическом режиме, под управлением какого то контроллера, то логичнее его будет оснастить герконами, а на самом толкателе закрепить небольшой магнит. На фото – я использовал параллельно включенные несколько герконов (для надежности). Герконы позволят надежно сработать «тормозам» и не боятся ни влаги ни грязи. Герконы подают сигнал в контроллер о том, что актуатор в крайнем положении и надо выключить двигатель. Использование герконов хорошо еще в том плане, что с их помощью (если потребуется) можно знать и о промежуточных положениях актуатора, что он прошел (или проходит) какую то точку.
Непрерывная и очень напряженная эксплуатация данного актуатора в теплице (высокая влажность и большие колебания температуры) показали абсолютную надежность конструкции. Никаких сбоев и замечаний выявлено не было. За лето пару раз наносил на шпильку по «чайной ложке» литола. Вот и все обслуживание. Управлялся как в ручном, так и в автоматическом режиме от температурного контроллера и просто от таймера. «Неспешность» и абсолютная прогнозируемость поведения актуатора позволяет точно рассчитывать время, в каком положении он окажется через некоторое время работы.
Себестоимость такого актуатора составила около 600 руб ($20) , включая покупку электромотора. Простота конструкции позволяет использовать ее как прототип для изготовления актуаторов всевозможного назначения и размеров.
Константин Тимошенко © 01.12.2011 г.
Цилиндрические линейные двигатели HIWIN
ПродукцияПоиск
Новости
30.12.2021 | С наступающим Новым 2022-м годом!Компания «Зетек» искренне и от всей души поздравляет вас с наступающим 2022-м годом! Желаем вам реализации всех намеченных планов и новых перспективных проектов. Надеемся на дальнейшее сотрудничество в новом году! |
13.05.2021 | Приглашаем посетить выставку «МЕТАЛЛООБРАБОТКА-2021» , 24-28 мая 2021 г.Уважаемые Клиенты и Партнеры! Компания «ЗЕТЕК» приглашает Вас посетить 21-ю международную специализированную выставку «Оборудование, приборы и инструменты для металлообрабатывающей промышленности» Мы будем рады видеть Вас на выставке 24 мая по 28 мая 2021 г. |
- Главная
- О компании
- Партнеры
- Новости
- Распродажа
- Заявка
- Контакты
- Поиск по сайту
- 3D
На главнуюПродукцияПродукция HIWINЛинейные двигатели
HIWIN
Цилиндрические линейные двигатели
Цилиндрические линейные двигатели
Цилиндрические линейные двигатели HIWIN MIKROSYSTEM серии LMT имеют малый вес и высокую степень динамичности благодаря наличию первичного элемента без сердечника (якоря). В качестве вторичного элемента выступает статор с постоянными цилиндрическими магнитами. Также линейные двигатели HiwinMikro серии LMT могут применяться во всех приложениях, где необходимо наличие винтового элемента, вследствие того, что они имеют аналогичный монтажный интерфейс.
- Серии LMT2, LMT6
- Серия LMTA, LMTB
- Серии LMTC, LMTD
Технические характеристики линейного двигателя серий LMT2/LMT6
| Обозначение | Единица измерения | LMT2D | LMT2Q | LMT2T | LMT6D | LMT6Q | LMT6T | |
| Постоянная сила | Fc | Н | 8 | 16 | 12 | 17 | 35 | 26 |
| Постоянный ток | lc | Аср | 1. 4 | 1.3 | ||||
| Пиковая сила для 1 сек. | Fp | H | 32 | 64 | 48 | 68 | 140 | 104 |
| Пиковый ток для 1 сек. | lp | Aср | 5.6 | 5.2 | ||||
| Постоянная силы | Kf | Н/Аср | 5. 7 | 11.4 | 8.6 | 13.4 | 26.8 | 20.1 |
| Электрическая постоянная времени | Ke | мс | 0.3 | 0.4 | ||||
| Сопротивление (межфазное при 25°С) | R25 | Ω | 4.2 | 8.4 | 6.3 | 7.3 | 14.5 | 10.9 |
| Индуктивность (межфазная) | L | мГн | 1. 1 | 2.2 | 1.7 | 2.8 | 5.7 | 4.3 |
| Шаг полюсной пары | 2т | мм | 48 | 60 | ||||
| Коэффициент противоЭДС (межфазный) | Kv | Вср/(м/сек.) | 2.8 | 5.6 | 4.2 | 6.6 | 13.2 | 9.8 |
| Постоянная электродвигателя (при 25°С) | Km | Нм/√Вт | 2. 3 | 3.2 | 2.8 | 4.0 | 5.8 | 4.9 |
| Термостойкость | Rth | °С/Вт | 5.36 | 2.68 | 3.57 | 3.57 | 1.80 | 2.39 |
| Датчик температуры | — | PTC Термистор | ||||||
| Макс. пост. напряжение | — | В | 330 | |||||
| Макс. температура в обмотке | — | °С | 110 | |||||
| Минимальный радиус изгиба кабеля двигателя | — | мм | 46.5 | |||||
| Масса генератора усилий | Mf | кг | 0.12 | 0.19 | 0.15 | 0.2 | 0.34 | 0.26 |
| Единичная масса статора | Ms | кг/м | 0. 9 | 1.4 | ||||
| Величина воздушного зазора | G | мм | 0.5 | 0.5 | ||||
| Длина генератора усилий | Lf | мм | 64 | 112 | 88 | 80 | 140 | 110 |
| Ширина генератора усилий | B | мм | 25 | 30 | ||||
| Внутренний диаметр генератора усилий | D1 | мм | 13 | 17 | ||||
| Диаметр статора | D | мм | 12±0. 2 | 16±0.2 | ||||
| Длина хода | S | мм | 50~1050 | 100~1050 | ||||
Габаритные размеры цилиндрического линейного двигателя LMT2/LMT6
|
LMT2D
|
LMT2Q
|
|
LMT2T
|
LMT6D
|
|
LMT6Q
|
LMT6T
|
Технические характеристики линейного двигателя серий LMTA/LMTB
| Обозначение | Единица измерения | LMTA2 | LMTA3 | LMTA4 | LMTB2 | LMTB3 | LMTB4 | |
| Постоянная сила | Fc | Н | 27 | 42 | 55 | 48 | 72 | 96 |
| Постоянный ток | lc | Аср | 1. 5 | 1.2 | ||||
| Пиковая сила для 1 сек. | Fp | H | 108 | 168 | 220 | 192 | 288 | 384 |
| Пиковый ток для 1 сек. | lp | Aср | 6 | 4.8 | ||||
| Постоянная силы | Kf | Н/Аср | 18 | 28 | 37 | 40 | 60 | 80 |
| Электрическая постоянная времени | Ke | мс | 0. 6 | 0.9 | ||||
| Сопротивление (межфазное при 25°С) | R25 | Ω | 7.4 | 11.1 | 14.8 | 16 | 24 | 32.4 |
| Индуктивность (межфазная) | L | мГн | 5 | 7.5 | 10 | 16.5 | 24.7 | 33 |
| Шаг полюсной пары | 2т | мм | 72 | 90 | ||||
| Коэффициент противоЭДС (межфазный) | Kv | Вср/(м/сек. ) | 11.7 | 17.5 | 23.3 | 22 | 33 | 44 |
| Постоянная электродвигателя (при 25°С) | Km | Нм/√Вт | 5.4 | 6.9 | 7.8 | 8.2 | 10 | 11.5 |
| Термостойкость | Rth | °С/Вт | 2.40 | 1.60 | 1.20 | 1.73 | 1.16 | 0.86 |
| Датчик температуры | — | PTC Термистор | ||||||
| Макс. пост. напряжение | — | В | 330 | |||||
| Макс. температура в обмотке | — | °С | 100 | |||||
| Минимальный радиус изгиба кабеля двигателя | — | мм | 37.5 | |||||
| Масса генератора усилий | Mf | кг | 0. 45 | 0.63 | 0.80 | 0.88 | 1.25 | 1.65 |
| Единичная масса статора | Ms | кг/м | 2 | 3.2 | ||||
| Величина воздушного зазора | G | мм | 0.75 | 0.75 | ||||
| Длина генератора усилий | Lf | мм | 94 | 130 | 166 | 120 | 165 | 210 |
| Ширина генератора усилий | B | мм | 40 | 50 | ||||
| Внутренний диаметр генератора усилий | D1 | мм | 21. 5 | 26.5 | ||||
| Диаметр статора | D | мм | 20±0.2 | 25±0.2 | ||||
| Длина хода | S | мм | 100~1550 | 100~1550 | ||||
Габаритные размеры цилиндрического линейного двигателя LMTA/LMTB
|
LMTA2
|
LMTA3
|
|
LMTA4
|
LMTB2
|
|
LMTB3
|
LMTB4
|
Технические характеристики линейного двигателя серий LMTC/LMTD
| Обозначение | Единица измерения | LMTC2 | LMTC3 | LMTC4 | LMTD2 | LMTD3 | LMTD4 | |
| Постоянная сила | Fc | Н | 92 | 138 | 55 | 48 | 72 | 96 |
| Постоянный ток | lc | Аср | 2. 4 | 1.2 | ||||
| Пиковая сила для 1 сек. | Fp | H | 368 | 552 | 220 | 192 | 288 | 384 |
| Пиковый ток для 1 сек. | lp | Aср | 9.6 | 4.8 | ||||
| Постоянная силы | Kf | Н/Аср | 38 | 58 | 37 | 40 | 60 | 80 |
| Электрическая постоянная времени | Ke | мс | 1 | 0. 9 | ||||
| Сопротивление (межфазное при 25°С) | R25 | Ω | 6.2 | 9.3 | 14.8 | 16 | 24 | 32.4 |
| Индуктивность (межфазная) | L | мГн | 7.2 | 10.8 | 10 | 16.5 | 24.7 | 33 |
| Шаг полюсной пары | 2т | мм | 120 | 90 | ||||
| Коэффициент противоЭДС (межфазный) | Kv | Вср/(м/сек. ) | 24.6 | 36.9 | 23.3 | 22 | 33 | 44 |
| Постоянная электродвигателя (при 25°С) | Km | Нм/√Вт | 12.6 | 15.4 | 7.8 | 8.2 | 10 | 11.5 |
| Термостойкость | Rth | °С/Вт | 1.12 | 0.75 | 1.20 | 1.73 | 1.16 | 0.86 |
| Датчик температуры | — | PTC Термистор | ||||||
| Макс. пост. напряжение | — | В | 330 | |||||
| Макс. температура в обмотке | — | °С | 100 | |||||
| Минимальный радиус изгиба кабеля двигателя | — | мм | 37.5 | |||||
| Масса генератора усилий | Mf | кг | 1. 49 | 2.1 | 0.80 | 0.88 | 1.25 | 1.65 |
| Единичная масса статора | Ms | кг/м | 6.4 | 3.2 | ||||
| Величина воздушного зазора | G | мм | 1 | 0.75 | ||||
| Длина генератора усилий | Lf | мм | 160 | 220 | 166 | 120 | 165 | 210 |
| Ширина генератора усилий | B | мм | 60 | 50 | ||||
| Внутренний диаметр генератора усилий | D1 | мм | 37 | 26. 5 | ||||
| Диаметр статора | D | мм | 35±0.2 | 25±0.2 | ||||
| Длина хода | S | мм | 100~2000 | 100~1550 | ||||
Габаритные размеры цилиндрического линейного двигателя LMTC/LMTD
|
LMTC2
|
LMTC3
|
|
LMTC4
|
LMTD2
|
|
LMTD3
|
LMTD4
|
| Открыть каталог в формате PDF |
|
| Скачать каталог в формате ZIP |
|
*Руководство пользователя и CAD-файлы доступны по запросу.
Магнитные двигатели на постоянных магнитах (схема, видео)
Согласно закону сохранения энергии, любой современный эл. привод не может иметь КПД выше 100%, потому как часть энергии нужно потратить на собственные нужды. Решить этот вечный вопрос призван двигатель на постоянных магнитах (униполярный, линейный, роторный, гравитационный и т. п), в котором механическое перемещение компонентов происходит за счет их взаимодействия на уровне магнитных свойств.
Принцип действия вечного магнитного движителя
Большинство современных эл. двигателей используют принцип трансформации эл. тока в механическое вращение ротора, а вместе с ним и приводного вала. Это значит, что любой расчет покажет КПД меньше 100%, а сам агрегат является зависимым, а не автономным. Та же ситуация наблюдается в случае генерирующего устройства. Здесь уже момент вращения вала, которое происходит за счет тепловой, ядерной, кинетической или потенциальной энергии движения среды, приводит к выработке электрического тока на коллекторных пластинах.
Двигатель на постоянных магнитах использует совершенно иной подход к работе, который нивелирует или сводит к минимуму необходимость в сторонних источниках энергии. Описать принцип работы такого двигателя можно на примере «беличьего колеса». Для изготовления демонстративной модели не требуются особые чертежи или расчет надежности. Необходимо взять один постоянный магнит тарельчатого (дискового) типа, полюса которого располагаются на верхней и нижней плоскостях пластин. Он будет служить основой конструкции, к которой нужно добавить два кольцевых барьера (внутренний, внешний) из немагнитных, экранирующих материалов. В промежуток (дорожку) между ними помещается стальной шарик, который будет играть роль ротора. В силу свойств магнитного поля, он сразу же прилипнет к диску разноименным полюсом, положение которого не будет меняться при движении.
Статор представляет собой условно пластину из экранируемого материала, на которую по кольцевой траектории крепят постоянные магниты, например, неодимовые. Их полюса расположены перпендикулярно по отношению к полюсам дискового магнита и ротора. В результате, когда статор приближается к ротору на определенное расстояние, возникает поочередное притяжение, отталкивание в магнитном поле, которое формирует момент затем перерастает во вращение шарика по кольцевой траектории (дорожке). Пуск и остановка происходят за счет приближения или отдаления статора с магнитами. Этот вечный двигатель на постоянных магнитах будет работать до тех пор, пока они не размагнитятся. Расчет ведется относительно размера коридора, диаметров шарика, пластины статора, а также цепи управления на реле или катушках индуктивности.
На подобном принципе действия было разработано немало моделей действующих образцов, например, синхронных двигателей, генераторов. Наиболее известными среди них являются двигатели на магнитной тяге Тесла, Минато, Перендев, Говарда Джонсона, Лазарева, а также линейные, униполярные, роторные, цилиндровые и т. д.
Рассмотрим каждый из примеров подробнее.
Магнитный униполярный двигатель Тесла
Выдающийся ученый, ставший в свое время пионером в области снабжения эл. током, асинхронных электродвигателей на переменном токе, не обделил своим вниманием и расчетом вопрос вечного источника энергии. В научной среде это изобретение именуется иначе, как униполярный генератор Тесла.
Первоначально расчет данного типа устройства вел Фарадей, но его прототип при сходном принципе действия не обладал должной эффективностью, стабильностью работы, то есть не достиг цели. Термин «униполярный» означает, что в схеме агрегата кольцевой, дисковый (пластина) или цилиндровый проводник расположен в цепи между полюсами постоянного магнита.
Магнитный двигатель Тесла и его схема
На схеме, которая была представлена в оригинальном патенте, есть конструкция с двумя валами, на которых размещаются две пары магнитов: В, В создают условно положительное поле, а С, С – отрицательное. Между ними располагаются униполярные диски с отбортовкой, используемые в качестве генерирующих проводников. Оба униполярных диска связаны между собой тонкой металлической лентой, которая может быть в принципе использована, как проводник (в оригинале) или для вращения диска.
Двигатель Минато
Еще одним ярким примером использования энергии магнетизма для самовозбуждения и автономной работы является сегодня уже серийный образец, разработанный более тридцати лет назад японцем Кохеи Минато. Его отличают бесшумность и высокая эффективность. По собственным заявлениям Минато, самовращающийся магнитный двигатель подобной конструкции имеет КПД выше 300%.
Двигатель Минато
Ротор имеет форму диска или колеса, на котором под определенным углом располагаются магниты. Когда к ним подводится статор с большим магнитом, возникает момент и колесо Минато начинает вращаться, используя попеременное сближение и отталкивание полюсов. Чем ближе статор к ротору, тем выше момент и скорость вращения. Питание осуществляется через цепь реле прерывателя.
Для предотвращения импульсов и биения при вращении колеса Минато, используют реле стабилизаторы и сводят к минимуму потребление тока управляющего эл. магнита. Недостатком можно считать отсутствие данных по нагрузочным характеристикам, тяге, используемых реле цепи управления, а также необходимость периодического намагничивания, о которой, кстати, тоже от Минато информации нет.
Может быть собран, как и остальные прототипы, экспериментально, из подручных средств, например, деталей конструктора, реле, эл. магнитов и т. п.
Двигатель Лазарева
Устройство двигателя Лазарева
Отечественный разработчик Николай Лазарев создал работающий и довольно простой вариант агрегата, использующего магнитную тягу. Его двигатель или роторный кольцар, состоит из емкости, разделенной пористой перегородкой потока на верхнюю и нижнюю части. Они сообщаются между собой за счет трубки, по которой из нижней камеры в верхнюю идет поток воды/жидкости. В свою очередь поры обеспечивают гравитационное перетекание вниз. Если под потоком жидкости поместить колесико, на лопастях которого будут закреплены магниты, то получиться добиться цели потока – вращения и создания постоянного магнитного поля. Схема роторного двигателя Николая Лазарева используется для расчета и сборки простейших самовращающихся устройств.
Магнитный мотор Говарда Джонсона
Магнитный мотор Говарда Джонсона
В своей работе и следующем за ней патенте на изобретение, Говард Джонсон использовал энергию, генерируемую потоком непарных электронов, присутствующих в магнитах для организации цепи питания мотора. Статор Джонсона представляет собой совокупность множества магнитов, дорожка расположения и движения которых будет зависеть от конструктивной компоновки агрегата Говарда Джонсона (линейной или роторной). Они закрепляются на специальной пластине с высокой степенью магнитной проницаемости. Одноименные полюса статорных магнитов направляются в сторону ротора. Это обеспечивает поочередное притяжение и отталкивание полюсов, а вместе с ними, момент и физическое смещение элементов статора и ротора относительно друг друга.
Организованный Говардом Джонсоном расчет воздушного зазора между ними позволяет корректировать магнитную концентрацию и силу взаимодействия в большую или меньшую сторону.
Генератор Перендева
Генератор Перендева
Еще одним неоднозначным примером действия магнитных сил является самовращающийся магнитный двигатель Перендев. Его создатель Майк Брэди, до того, как в его отношении начали уголовное производство, даже успел обзавестись патентом, создать одноименную фирму (Перендев) и поставить дело на поток. Если анализировать представленную в патенте схему и принцип, или чертежи самодельных эл. двигателей, то ротор и статор имеют форму диска и внешнего кольца. На них по кольцевой траектории размещают отдельные магниты, соблюдая определенный угол относительно центральной оси. За счет взаимодействия поля отдельных магнитов статора и ротора Перендев, возникает момент и происходит их взаимное перемещение (вращение). Расчет цепи магнитов сводится к определению угла расхождения.
Синхронный двигатель на постоянных магнитах
Устройство синхронного двигателя на магнитах
Одним из основных видов электродвигателей является синхронный, частота вращения магнитных полей статора и ротора которого равны. У обычного электромагнитного мотора обе эти части состоят из обмоток на пластинах. Но если конструкцию якоря поменять и вместо катушки поставить постоянные магниты, то можно получить интересную, эффективную, действующую модель синхронного двигателя. Статор имеет привычную компоновку магнитопровода из пластин и обмоток, в которых способно генерироваться вращающееся магнитное поле от электрического тока. Ротор создает постоянное поле, которое взаимодействует с предыдущим, и создает крутящий момент.
Также следует отметить, что в зависимости от схемы, относительное расположение статора и якоря могут меняться, например, последний будет выполнен в форме внешней оболочки. Для пуска мотора от тока из сети используется цепь из магнитного пускателя (реле, контактора) и теплового защитного реле.
Должны ли вы построить или купить свой собственный? (Как направлять)
Возможно, вам пришла в голову идея сделать собственный линейный привод своими руками. Независимо от того, ищете ли вы линейный привод для чего-то простого, например, для управления вентиляцией теплицы, или для более сложного, например, для подъемной системы для телевизора, у вас есть два варианта его приобретения — купить или построить.
Выбор варианта может быть сложным. Оба имеют разные процессы, преимущества, недостатки и результаты. Чтобы помочь вам сделать окончательный выбор, давайте подробнее рассмотрим варианты, проведя вас через соображения, преимущества и недостатки покупки или сборки привода.
Что такое линейный привод?
Линейный привод — это устройство, которое изменяет вращательное движение двигателя для обеспечения движений толкания и тяги, позволяя приводу поднимать, опускать, наклонять, сдвигать и опрокидывать предметы одним нажатием кнопки.
Существует несколько областей применения линейных приводов. Некоторые области применения включают:
- Управление дроссельной заслонкой
- Домашняя автоматизация
- Робототехника и аниматроника
- Применение в сельском хозяйстве
- Люки с электроприводом
Линейные приводы обеспечивают полный контроль над целым рядом плавных и безопасных движений. Они также энергоэффективны, часто имеют длительный срок службы и требуют минимального обслуживания.
Типы линейных приводов
Линейные приводы делятся на три основные категории, каждая из которых отличается по принципу действия и применению, включая:
Гидравлические линейные приводы
Этот тип линейных приводов использует гидравлическую жидкость под давлением. Они отлично подходят для приложений, требующих точного управления, механической жесткости и больших усилий.
Однако они могут быть довольно громкими, выделять много тепла и нуждаться в регулярном обслуживании. Для их работы также требуется дополнительное оборудование, такое как насосы, выпускные клапаны и клапаны для жидкости.
Пневматические линейные приводы
Эти приводы используют сжатый воздух и используются в областях, где важна скорость. Некоторые из этих областей включают насосы, стоматологию, воздушные компрессоры, пистолеты для гвоздей, почтовые трубки и многое другое.
Электрические линейные приводы
Электрические линейные приводы состоят из двигателя, ходового винта и набора шестерен, которые толкают центральный стержень внутрь и наружу. От робототехники до погрузочно-разгрузочных работ и работы с солнечными панелями области применения электрических линейных приводов широко распространены.
Изготовление или покупка линейного привода
Помимо выбора типа линейного привода для вашего проекта, существует также вопрос выбора линейного привода, сделанного своими руками, или его покупки. Вот что будет включать каждый из этих вариантов:
Покупка линейного привода
При покупке линейного привода необходимо учитывать некоторые факторы, такие как:
- Желаемый размер вертикально или горизонтально, штокового вала
- Крепление
- Как далеко и быстро будет перемещаться шток
- Как часто вы собираетесь его использовать
Ваши критерии и потребности проекта определят нужный вам привод. Перед покупкой убедитесь, что у вас есть как можно больше информации. Имея в виду эту информацию, опытный и лицензированный поставщик может провести вас через весь процесс и помочь вам приобрести привод, подходящий для вашего проекта.
Если вы впервые покупаете линейный привод, вам может быть сложно уследить за всем отраслевым жаргоном — не стесняйтесь задавать столько вопросов, сколько вам нужно.
Преимущества покупки линейного привода
- Легко интегрируемый с электронными системами и системами управления движением
- Требуется минимальное обслуживание и имеет более длительный срок службы
- Нижние потребности в мощности
- Особенности безопасности
- Часто меньше NOISY
SETBACK STACKS STACKS STACKS STABKEBBABKEBBABLESTBACK
. Покупка актуатора
- Потенциально дорого — убедитесь, что вы заранее проанализировали доступный бюджет
- Установка может потребовать технических знаний и быть длительным процессом линейный привод будет учитывать некоторые из тех же соображений, что и при покупке, это совершенно другой вариант. Для многих основная мотивация линейных приводов «сделай сам» — снижение стоимости.
Как собрать линейный привод
Хотя точный процесс сборки самодельного линейного привода будет зависеть от ваших конкретных целей, он обычно включает следующие шаги:
Приобретите необходимые материалы и инструменты
Вам потребуются материалы такие как смола, двигатель, гайки и болты M10, вазелин и многое другое. Помимо материала, вам также понадобятся такие инструменты, как молоток, ножовка и плоская отвертка.
Конкретные инструменты и материалы, которые вам понадобятся, будут зависеть от ваших требований и масштабов проекта, а приобретение некоторых из них может повлечь за собой дополнительные расходы (обязательно примите это во внимание, принимая решение о строительстве или покупке).
Изготовление приводной муфты
Существует три различных типа приводных муфт. Во-первых, это жесткая связь. Основной проблемой этого варианта является трение и изгиб, возникающие при смещении вала.
Второй тип представляет собой гибкую приводную муфту, которая является рекомендуемым вариантом. Гибкие муфты решают проблему трения и изгиба. У вас также есть возможность приобрести готовую гибкую приводную муфту.
Изготовление толкателя
Изготовьте основание, монтажный кронштейн двигателя и опору упорного подшипника
При изготовлении монтажного кронштейна двигателя вам, возможно, придется подложить шайбы под головку каждого винта, чтобы винты не зашли слишком далеко и не деформировали корпус двигателя. .
Поскольку муфта двигателя не предназначена для передачи продольной силы, крепление упорного подшипника помогает передавать усилие толкателя на основание, не нагружая муфту двигателя или сам двигатель.
Добавить концевой выключатель
Концевые выключатели представляют собой микровыключатели с плечом рычага и роликом. Включите концевой выключатель IN и OUT.
Когда переключатель IN установлен рядом с опорой подшипника, переключатель OUT определяет присутствие толкателя в заданной точке от переключателя IN.
Расположение этой точки зависит от того, насколько далеко вы хотите вытянуть удилище.Обратите внимание на проводку
Толкающее и тянущее движение стержня становится возможным благодаря изменению полярности подаваемого напряжения. При подключении привода убедитесь, что используемые провода имеют толщину, необходимую для прохождения тока двигателя. Провода также должны быть многожильными, чтобы они могли выдерживать вибрацию двигателя.
Вам потребуются диоды, чтобы концевой выключатель останавливал двигатель и вращал его в противоположном направлении. Установите диоды на прототип печатной платы, которую затем привинтите к основанию, расположенному под муфтой.
Хотя диоды часто не пропускают ток, они все же должны проводить пусковой ток двигателя.
Проверка производительности ваших линейных приводов
После того, как вы закончите с проводкой, следующим шагом будет проверка производительности вашего привода.
Здесь измерьте время, необходимое приводу для втягивания и выдвижения, попробовав его с различными нагрузками и токами двигателя.С самодельными системами линейного перемещения каждый проект уникален и сопряжен с уникальными проблемами. Эти проблемы могут варьироваться от выбора типа привода до установки резьбового стержня и внешнего корпуса. Вы даже можете столкнуться с ситуациями, которые требуют технических навыков, на которые вы не способны.
Вам также понадобится подходящее рабочее место, если сборка требует нагрева ПВХ или использования клея, который может выделять токсичные пары. Никогда не выполняйте эти действия в непроветриваемом помещении.
Преимущества создания привода
- Индивидуализация — вы можете создать привод, соответствующий вашим потребностям
- Потенциально менее затратный устранить любые проблемы самостоятельно
Неудачи при сборке актуатора
- Требует времени и усилий
- Не так быстро, как покупка актуатора
- Если у вас нет необходимых знаний и навыков, это может оказаться непосильной и разочаровывающей задачей.
- Всегда есть шанс, что он не сработает, и ваше время, усилия и средства будут потрачены впустую
Купить или построить линейный привод: какой вариант выбрать?
Что лучше купить или пойти по пути «сделай сам», зависит исключительно от вас, вашего уровня навыков, наличия времени и приемлемого уровня риска.
Если вы все еще не можете принять решение, есть тест из трех пунктов, который поможет вам принять решение. Это конкретные вопросы, связанные с тремя основными факторами: временем, опытом и фактической стоимостью.
Сопоставление времени, которое потребуется обоим вариантам, с учетом срочности вашего проекта может помочь вам определить, какой вариант вам больше подходит. Оценка имеющегося у вас опыта также поможет вам оценить свою способность обеспечить желаемую производительность, если вы будете собирать привод самостоятельно.
Возможность столкнуться с проблемами во время вашего проекта «Сделай сам» добавляет несколько скрытых расходов, о которых вы могли не знать изначально.
Глядя на фактические затраты проекта, вы можете проанализировать, сколько вам будет стоить покупка необходимых материалов и инструментов и исправление возможных ошибок.Если вы решите купить свой линейный привод, Creative Motion Control поможет реализовать некоторые преимущества самодельного привода без каких-либо недостатков. Мы сочетаем отличные технологии с исключительной поддержкой и обслуживанием клиентов, поставляя индивидуальные продукты, способные обеспечить непревзойденную производительность и инновации.
Благодаря нашим разработкам и продуктам мы прочно закрепили за собой лидерство в отрасли производства систем управления линейным перемещением. От проектирования до производства, продажи и доставки — мы здесь, чтобы служить вам. Сделайте выбор в пользу удобства линейного привода, который не может обеспечить самодельный линейный привод. Свяжитесь с Creative Motion Control и получите предложение уже сегодня.
Подробнее:
https://www.machinedesign.com/mechanical-motion-systems/linear-motion/article/21828986/electric-linear-actuators-make-or-buy5 идей для самодельных линейных приводов Проекты
– Progressive AutomationsЛинейные актуаторы полностью изменили то, как все движется вокруг нас.
Это изобретение современной техники позволило автоматизированной механизации заменить ручной труд при выполнении рутинных, двигательных операций. Преобразуя пневматическую, гидравлическую или электрическую энергию в линейное перемещение, актуаторы идеально подходят для автоматизации любого объекта. Их универсальность этих компонентов нашла идеи практически во всех сферах жизни – от сельского хозяйства и аэрокосмической отрасли до медицины и образования. Преимущество использования этих устройств заключается в том, что пользователю не нужно быть специалистом в какой-либо отрасли, чтобы оценить их. Их простота установки и использования позволяет нам автоматизировать все, что делается в домашних условиях, таким образом, без особых усилий интегрируя их в наши дома для нашего полного удобства.Вы задумали интересный проект? Подать заявку на спонсорство нашего проекта!
В этой статье мы выделили несколько самодельных проектов с использованием наших линейных приводов, которые привлекли наше внимание за последние несколько лет.
У нас есть ряд доступных приводов, которые ждут вас, чтобы реализовать их в вашем следующем домашнем проекте!Домашние проекты с использованием линейных приводов
Вот несколько проектов, которые автоматизируют задачи в вашем доме, от выдвижных полочек для специй и выпадающих телевизоров до авиасимулятора — мы обеспечим вас!
Выдвижные полки для специй и регулируемые кухонные шкафы
Являясь сердцем дома, кухня представляет собой идеальное место для внедрения домашней автоматизации – простейшим примером является автоматический дозатор специй. Это изящное изобретение, предназначенное для установки под кухонной стойкой или кухонным островом, поднимается над поверхностью, оптимизируя пространство для хранения.
После того, как вы реализовали этот проект, вы можете попробовать свои силы в многочисленных расширенных возможностях! Например, вы можете оборудовать свои навесные шкафы линейными приводами, чтобы опускать или поднимать их по мере необходимости.
Такая механизация может быть особенно полезна для пожилых людей или людей с ограниченными физическими возможностями.Откидные телевизоры
Для человека, умеющего делать все своими руками, спрятать телевизор в потолке может быть простым делом. Выбор схемы конструкции во многом определяется наличием потолочного пространства. Например, если есть чердак, экран может подниматься и опускаться вертикально из-под потолка. Если комната для этого проекта не имеет такой совместимости, вы также можете построить откидной телевизор. Это делается путем размещения телевизора параллельно потолку, когда он не используется. В обоих случаях это идеальный компактный проект, который особенно стоит реализовать на яхтах, жилых автофургонах и других помещениях с ограниченным пространством.
Выдвижные телевизоры для спальни
Подобно предыдущему раскрывающемуся меню, выдвижные телевизоры также популярны в гостиных и спальнях! Телевизор можно установить так, чтобы он поднимался от изножья кровати, или использовать линейные приводы, поднимающие его изнутри шкафа. Последний вариант может быть предпочтительнее, поскольку позволяет легко перемещать мебель в случае необходимости.
Скрытые подъемники для мониторов
Моторизованный подъемник также можно использовать, чтобы скрыть монитор компьютера под столом. Это полезно, если устройство не используется регулярно в течение дня или если место на рабочем столе необходимо для нескольких целей. Он просто предоставляет больше места на столе, которое можно использовать по своему усмотрению.
Создайте домашний авиасимулятор
Если вы можете мечтать об этом, с помощью правильных инструментов вы сможете это сделать! Прошли те времена, когда тренажеры были ограничены учебными заведениями и крупными компаниями.
Любители и создатели DIY используют компоненты управления движением для создания уникальных, интерактивных и экономичных симуляторов. Симулятор полета, оснащенный несколькими линейными приводами PA-03 и PA-04, построен и спроектирован Энтони Эскаланте. Каждый привод плавно наклоняет, вращает и поворачивает подвижную платформу, имитируя настоящий полет. Это сопровождается четырьмя источниками питания (три PS-40-12, один PS-13-12) и системой управления, которая включает в себя драйверы двигателей и микроконтроллеры, аккуратно упакованные в центр управления симулятора.У нас есть широкий выбор электрических линейных приводов для любого проекта — нажмите, чтобы просмотреть!
Обувь в «Nicebox»
Седрик Таунсенд из «Nicebox» изготовил индивидуальный ящик для хранения для Миннесотских викингов WR Charles Johnson.
Это было сделано с помощью наших приводов и систем управления. Приводы используются для открывания крышки ящика и дальнейшего выдвижения нижнего ящика во время использования.Автоматизация двора и газона
Ключевым требованием для использования этих устройств на открытом воздухе является использование приводов с высокой степенью защиты. Для определенных проектов также могут потребоваться датчики, но после их приобретения возможности безграничны. Примерами реализации являются освещение, такое как прожекторы, прожекторы или ландшафтное освещение, или полив, например, с помощью разбрызгивателей и капельниц.
Скрытый стол-подъемник в японском стиле
Минимализм стал настоящей модой в дизайне интерьера. Эта экономия места идеально подходит для современного дома или квартиры, особенно если места мало!
Проектор-планетарий
«Проектор-планетарий» был построен компанией Free Fall Technologies в их попытке добраться до звезд.
Проект представляет собой индивидуальный подъемник для проектора планетария, в котором используется наш набор подъемных колонн FLT-03-2-1, обеспечивающий вертикальное движение.Портативный солнечный трекер
И последнее, но не менее важное: это наш собственный портативный одноосный солнечный трекер. Поскольку солнечная энергия становится одним из самых доступных и недорогих видов возобновляемой энергии, мы подумали, что было бы интересно продемонстрировать, как можно улавливать энергию с помощью контролируемого движения.
Заключение
Линейные приводы могут быть частью многих современных проектов DIY, обеспечивающих дополнительный комфорт, значительную экономию места и другие удобства, которые делают нашу повседневную жизнь исключительно удобной и удобной.
Если вы работали или работаете над проектом с использованием наших линейных приводов, мы хотели бы узнать об этом больше! Вы также можете подать заявку на участие в нашей программе спонсорства проектов, которая дает изобретательным проектам «сделай сам», использующим наши приводы, скидку на их заказ задним числом.Линейные приводы: производство или покупка
Next Story
из «Руководства по системам перемещения 2019»
Пневматические приводы
Гибридные приводные системы Parker Hannifin представляют собой мощные автономные линейные приводы. Они обладают преимуществами электрических приводов, плотностью мощности и отказоустойчивостью традиционной гидравлики.
Благодаря широкому ассортименту линейных приводов, представленных на рынке, машиностроителям и конечным пользователям становится проще найти стандартный или «индивидуальный стандартный» продукт, отвечающий даже самым уникальным требованиям применения. Но все еще бывают случаи, когда с финансовой или технической точки зрения имеет смысл спроектировать и изготовить привод собственными силами.
Однако решение «производить или покупать» не так однозначно, как просто сложить стоимость компонентов, которые можно сделать своими руками, и сравнить это с готовым решением. Выбор между самодельным актуатором и готовым означает рассмотрение многих факторов, некоторые из которых трудно измерить с точки зрения времени или денег. В дополнение к техническим деталям проектирования и сборки, есть базовая бизнес-оценка того, можно ли (и нужно ли) это делать собственными силами, а также часто упускаемый из виду фактор послепродажной поддержки.
ОЦЕНКА БИЗНЕСА LINEAR-ACTUATOR
Первый вопрос, который компания должна задать, прежде чем приступить к созданию собственного линейного привода: есть ли у нас опыт, чтобы сделать это собственными силами? Имейте в виду, что это включает не только механическую конструкцию, но также определение размеров и выбор двигателя и элементов управления, а также интеграцию системы. Во многих случаях один отдел или функциональная область имеет опыт механического проектирования, а другой отдел обладает знаниями в области электротехники.
В этих случаях используйте оба набора знаний, создав межфункциональную группу для этапа проектирования и проектирования.Если ответ на вопрос об опыте «да», то следующий вопрос, на который следует обратить внимание, это наличие у вас возможностей и ресурсов для выполнения этой работы собственными силами. Этот вопрос часто упускается из виду, поскольку менеджеры предполагают, что если проект выполняется собственными силами, компания контролирует качество, стоимость и сроки. Но создание актуатора означает полагаться на множество внешних поставщиков и зависеть от их доставки и качества. Если проект задерживается, это может повлиять на клиентов или на прибыль.
КЛЮЧЕВЫЕ ВОПРОСЫ: Обладаем ли мы знаниями в области линейного перемещения и управления для самостоятельной сборки привода? Каковы последствия, если проект будет отложен?
Некоторые приводы зависят от области применения. Показательный пример: новая модель пресса Tolomatic RSX (RSX096P) с электрическим линейным приводом увеличивает диапазон усилий существующего семейства продуктов RSX до 40 000 фунтов силы (178 кН) и предназначена для усилия в направлении выдвижения.
Электропривод пресс-модели RSX предназначен для формообразования и сборки, прессования, пробивки, штамповки, клепки, крепления и соединения.ТРЕБОВАНИЯ К ПРОИЗВОДСТВУ И СБОРКЕ
Самостоятельное изготовление привода означает, что вы можете спроектировать его в соответствии со своими конкретными потребностями. Основными компонентами любого привода являются основание, направляющая и приводной блок. Одним из самых простых типов приводов, которые можно изготовить самостоятельно, является конструкция, основанная на алюминиевом профиле. Преимущество использования экструзии заключается в том, что они легко доступны в широком диапазоне поперечных сечений и длин. Они также требуют незначительной модификации или вообще не требуют модификации для монтажа направляющих и приводного механизма. Недостатком использования экструзии является то, что, когда требуется высокая точность перемещения, трудно получить точную монтажную поверхность.
Следующий вариант — это обработанная опорная плита.
Относительно недорогая и простая в обработке алюминиевая пластина является хорошим решением для многих приводов собственного производства. Если требуется очень высокая точность перемещения и жесткость, то, как правило, лучшим выбором является обработанный стальной лист. Будь то алюминий или сталь, если используется обработанная опорная плита, обязательно оцените, можно ли выполнить механическую обработку собственными силами. Это также относится к другим механически обработанным деталям, таким как опоры двигателя и редуктора, опорные плиты и защитные кожухи. Эти элементы можно легко упустить из виду при оценке времени и мощностей, необходимых для собственного производства.Тип используемой направляющей часто определяется вместе с решением относительно базовой конструкции привода. Когда в качестве основы используется алюминиевый профиль, лучшим выбором обычно является одинарная направляющая на основе кулачковых роликов, колес или круглого вала и линейных шариковых втулок. Для большей жесткости можно использовать профилированные рельсы и каретки.
Но если выдавливание не может быть обработано для точной установки, преимущество более высокой точности перемещения, которую обычно обеспечивают профилированные рельсы, будет утрачено из-за неточностей в выдавливании.В приложениях с высокими моментными нагрузками обычно требуются две направляющие, установленные параллельно, что требует использования либо очень широкого профиля, либо опорной плиты для размещения направляющих, расположенных бок о бок. Приводной механизм, независимо от того, является ли он ременным, винтовым, реечным и шестеренчатым и т. д., должен быть установлен между двумя направляющими, чтобы уменьшить эффект заедания. В конструкциях с двумя направляющими важно правильно выровнять две направляющие, чтобы избежать заедания, которое может вызвать дополнительные нагрузки на подшипники и сократить срок их службы.
Приводные механизмы обычно представляют собой ремни или винты. Ременные приводы относительно легко интегрировать, поскольку они не требуют точного выравнивания.
Однако они должны быть правильно натянуты, чтобы устранить «провисание» ремня и позволить ему соответствовать номинальному усилию. Натяжение во время сборки обычно не является проблемой, но подумайте о том, как конечный пользователь будет проверять натяжение ремня и при необходимости повторно натягивать его. Это должен быть относительно простой процесс обслуживания, не требующий от пользователя значительных затрат времени на разборку и повторную сборку.Если приводным механизмом является шариковый или ходовой винт, определите, какой тип торцевой опоры необходим. Простая фиксированная конструкция (радиально-упорный подшипник на ведомом конце и одиночный шарикоподшипник на неприводном конце) является наиболее распространенной, но если будут возникать значительно высокие скорости или потери устойчивости, может быть использована конструкция фиксированного фиксированного подшипника. соответствующий.
КЛЮЧЕВЫЕ ВОПРОСЫ: Можно ли выполнить необходимую механическую обработку, выравнивание и сборку на месте? Способны ли производители обеспечить требуемый объем производства?
ПОТРЕБНОСТИ В ПОДДЕРЖКЕ ПРИВОДА ДЛЯ КОНЕЧНОГО ПОЛЬЗОВАТЕЛЯ
Большинство приводов выполняют критически важную функцию в машине или процессе, и время простоя может иметь катастрофические последствия для производительности.
Это делает поддержку клиентов важным фактором при принятии решения о покупке. Есть ли у вас персонал, который может поддержать привод в случае необходимости устранения неполадок или обслуживания? Можете ли вы доставить запасные части, необходимые для быстрого ремонта? Эти соображения являются ключевыми, независимо от того, является ли привод частью производственной машины, проданной внешним клиентам, или частью собственной машины — с одним из ваших собственных отделов в качестве заказчика.Также помните, что компоненты с элементами качения или рециркуляции, скорее всего, будут нуждаться в повторной смазке в течение срока службы машины. Особенно это касается шарико-винтовых пар, линейных направляющих на шарикоподшипниках и профилированных рельсовых направляющих. Даже если компоненты смазаны «на весь срок службы», условия применения могут потребовать повторной смазки в течение срока службы машины. Принятие во внимание обслуживания, осуществляемого пользователем на этапе проектирования, упростит требования к обслуживанию.
КЛЮЧЕВЫЕ ВОПРОСЫ: Есть ли у нас структура и ресурсы (персонал и инвентарь) для поддержки конечных пользователей в случае необходимости устранения неполадок и ремонта? Насколько легко пользователю выполнять базовое техническое обслуживание?
Точно так же, как покупка готового привода должна включать оценку всех связанных с этим затрат, изготовление привода собственными силами требует учета требований к проектированию, производству и обслуживанию, а также стоимости компонентов.
ЧТО ТАКОЕ 12-ВОЛЬТНЫЙ ЛИНЕЙНЫЙ ПРИВОД?
Линейные приводы обычно характеризуются механизмом привода — ременной передачей, шариковой или ходовой винтовой передачей или пневматическим приводом. Но нет ничего необычного в том, что электрические приводы стержневого типа классифицируются по входному напряжению — обычно 12 или 24 вольта — их встроенных двигателей. Эти приводы обеспечивают силу тяги, как пневматический или гидравлический цилиндр. Фактически, электрические приводы стержневого типа широко используются для замены пневматических или гидравлических цилиндров из-за их простоты и потенциальной экономии средств, которая может быть реализована за счет переключения с гидравлического привода на движение с электрическим приводом.
Как следует из названия, линейный привод на 12 В включает двигатель постоянного тока на 12 В, встроенный в корпус привода или плотно соединенный с ним. 12-вольтовые приводы приводятся в действие почти исключительно одним из двух механизмов — шарико-винтовой передачей или ходовым винтом. И в большинстве конструкций используется редуктор или мотор-редуктор для оптимизации осевых и скоростных характеристик привода. Самая базовая конструкция включает концевые выключатели на каждом конце хода, что означает, что привод полностью выдвигается и втягивается без промежуточного положения. Но производители предлагают программируемые концевые выключатели в качестве опции для промежуточного позиционирования.
Поскольку эти электрические стержневые приводы часто используются для замены гидравлических или пневматических цилиндров, некоторые из их основных конструктивных особенностей соответствуют прецедентам, установленным другими технологиями. Монтаж — хороший пример. Линейный привод на 12 В обычно монтируется так же, как пневматический или гидравлический цилиндр, причем большинство из них имеют варианты монтажа как на вилке, так и на цапфе.
В некоторых линейках линейных приводов на 12 В вы найдете размеры корпуса и варианты монтажа, соответствующие стандартам ISO, NFPA и другим, что значительно упрощает преобразование пневматического или гидравлического привода в электрический привод в существующих приложениях.Одно из наиболее важных различий между приводами стержневого и ползункового типа заключается в том, что приводы стержневого типа обеспечивают только осевое усилие. Их основное использование — толкать или тянуть груз через трубку или стержень, который выдвигается и втягивается из привода. В то время как плоская втулка направляет стержень, нет линейных направляющих для поддержки и переноса нагрузки. В большинстве приложений поддержка и направление нагрузки обеспечиваются гусеницами или рельсами, независимыми от привода. Этот принцип работы объясняет, почему эти приводы имеют несколько разных названий, включая электрические цилиндры, приводы упорного типа и приводы штокового типа.
Определение размера и выбор линейного привода на 12 В довольно просты, поскольку двигатель предварительно выбран и встроен в привод.
Первым параметром, который необходимо учитывать, обычно является тяга, так как она часто определяет общий размер привода. Следующим шагом является длина хода, поскольку небольшой привод может удовлетворить требования по тяге, но может не обеспечить необходимую длину хода.Обратите внимание, что, как и линейные приводы ползункового типа, приводы стержневого типа, приводимые в движение шариковым или ходовым винтом, могут иметь обратный ход. Когда приложение требует вертикальной работы, не забудьте проверить, что вертикальная нагрузка не превышает крутящий момент обратного хода винта.
При начальном выборе привода на основе осевого усилия и хода можно затем проверить требования к скорости и рабочему циклу. Допустимые комбинации силы и скорости обычно предоставляются производителем в виде кривой производительности или диаграммы. Как только будет подтверждено, что все остальные параметры находятся в пределах возможностей привода, важно проверить требуемый рабочий цикл или «время», поскольку нагрев двигателя может быть ограничивающим фактором для производительности привода.
ПОДХОДЯЩИЕ ПРИМЕНЕНИЯ ДЛЯ ПРИВОДОВ НА 12 В
Практически в любое время, когда необходимо толкать или тянуть груз без направления или переноски, хорошим выбором является привод стержневого типа. Это включает в себя открытие и закрытие раздвижных дверей в таких приложениях, как железнодорожные вагоны и обрабатывающие центры. В медицинской промышленности приводы на 12 В часто используются для эргономичного позиционирования рабочих столов или кроватей пациентов.
При транспортировке эти приводы могут останавливать или отклонять продукт. Поскольку они полностью закрыты и доступны в исполнении со степенью защиты IP или в гигиеническом исполнении, приводы стержневого типа также отлично подходят для фармацевтических и пищевых продуктов и напитков, требующих чисто осевых операций для вставки, маркировки или штамповки.
ВЫСОКОСКОРОСТНЫЕ ЛИНЕЙНЫЕ ПРИВОДЫ: ЧТО ИХ ОПРЕДЕЛЯЕТ?
Как и многие другие термины, используемые в отрасли линейного перемещения, такие как сверхмощный, миниатюрный и коррозионно-стойкий, и это лишь некоторые из них, не существует отраслевого стандарта, определяющего, что представляет собой высокоскоростной линейный привод.
Тем не менее, существуют некоторые общие рекомендации, которым следуют производители при классификации и продаже своих приводов как высокоскоростных. Эти рекомендации обычно основаны на приводном механизме, типе привода и даже на основном использовании или отрасли. Понимание этих различий может помочь вам принять обоснованное решение, когда ваше приложение требует высокоскоростного линейного привода.
Эти программируемые приводы PA от Nook Industries поставляются в виде полных систем (включая двигатель, привод, контроллер и источник питания) и рассчитаны на непрерывную работу. Приводы с конусообразным винтом предназначены для более низких рабочих циклов, где требуется самоблокировка; Зубчато-ременные передачи предназначены для параллельной установки двигателя. Ход достигает 24 дюймов с повторяемостью от ±0,004 до ±0,001 дюйма; приводы также имеют стандартные фланцы двигателя и редуктора. Существуют версии IP54 или IP65 в зависимости от двигателя.
СКОРОСТЬ В ОСНОВНОМ ЗАВИСИТ ОТ ПРИВОДНОГО МЕХАНИЗМА
Ограничивающим фактором скорости линейного привода обычно является приводной механизм.
Поскольку конструкции ходового винта основаны на скользящем контакте и выделяют сильное тепло из-за трения, они часто имеют более низкие максимальные скорости, чем шариковые винты аналогичного размера. Таким образом, из винтовых технологий приводы на основе шарико-винтовых передач с большей вероятностью будут считаться высокоскоростными, чем приводы на основе ходовых винтов.
Приводы на основе ременной передачи или реечной передачи обычно способны развивать более высокие скорости, чем шарико-винтовые пары, при условии, что они правильно натянуты (для версий с ременным приводом) или предварительно нагружены (для версий с реечной передачей). Приводы со стальным армированным ремнем могут развивать скорость 10 м/сек и выше, в то время как приводы с реечным приводом обычно достигают скорости 5 м/сек.
ТИП ПРИВОДА ТАКЖЕ ИГРАЕТ РОЛЬ В МАКСИМАЛЬНОЙ СКОРОСТИ
Еще один фактор играет роль при обсуждении высокоскоростных линейных приводов: тип привода. «Высокоскоростное обозначение чаще всего применяется к приводам толкающего типа (также называемым электрическими цилиндрами), потому что их основное применение включает операции толкания-вытягивания и вставки, которые обычно требуют очень короткого времени выдвижения и втягивания.
Эти приводы могут приводиться в движение шариковым или ходовым винтом со скоростями от 0,1 м/сек до более 1 м/сек.Некоторые производители даже предлагают стержневые приводы с ременным приводом, которые могут развивать скорость до 2,5 м/с.
Приводы ползункового или кареточного типа (также называемые бесштоковыми приводами) во многих случаях могут достигать даже более высоких скоростей, чем приводы стержневого типа. Но поскольку они в основном используются для позиционирования и транспортировки, как правило, с большими нагрузками, они реже позиционируются как высокоскоростные. Приводы бесштокового или ползункового типа имеют широкий спектр вариантов привода, включая ходовой винт, шарико-винтовую передачу, реечную шестерню, ремень и линейный двигатель.
Линейные двигатели по своей природе обеспечивают максимальную скорость, без механических частей, ограничивающих скорость или создающих трение и тепло. Но при включении в линейный привод приводы с линейными двигателями ограничены скоростью направляющего механизма.
Точно так же ременные приводы, армированные сталью, могут развивать скорость более 12 м/с, но, как и линейные двигатели, ограничены максимальной скоростью направляющей. Наиболее распространенными направляющими системами, используемыми с линейными двигателями и ременными приводами, являются рециркуляционные профилированные рельсовые подшипники, максимальная скорость которых обычно достигает 5 м/с. ограничение общей скорости привода до 5 м/с или менее.Тем не менее, более высокие скорости могут быть достигнуты, если ременные передачи работают в паре с кулачковыми роликовыми направляющими, а не с рециркулирующими профилированными рельсовыми подшипниками. Эти высокоскоростные линейные приводы с предварительно нагруженными направляющими кулачковыми роликами и надлежащим образом натянутым армированным сталью ременным приводом выигрывают гонки со скоростью перемещения до 10 м/с.
СПЕЦИАЛЬНЫЙ СЛУЧАЙ МИНИАТЮРНОГО ЛИНЕЙНОГО ПРИВОДА
Для приложений микро- и нанопозиционирования предпочтительные приводы часто основаны на звуковой катушке или пьезотехнологии.
Ультразвуковые пьезоприводы могут развивать скорость 0,5 м/сек и выше, но обычно имеют максимальный ход 100 мм или меньше. Приводы со звуковой катушкой работают со скоростью 0,30 м/сек с ходом до 150 мм.Хотя эти характеристики могут не соответствовать общему определению высокоскоростных линейных приводов, учитывая быстрое ускорение, необходимое для достижения этих скоростей при очень коротких длинах хода, конструкции с пьезоэлектрическими и звуковыми катушками можно легко классифицировать как высокоскоростные приводы.
Линейные двигатели, линейное перемещение | SEW‑ЕВРОДРАЙВ
Наши линейные серводвигатели SL2 или электрические цилиндры CMS.. обеспечивают необходимое линейное движение в высокодинамичных системах автоматизации. Более того, в серии SL2 отсутствуют компоненты механической трансмиссии и быстроизнашивающиеся детали.
Благодаря роторам с постоянными магнитами наши электрические цилиндры увеличивают мощность в пять раз быстрее, чем обычные пневматические цилиндры, и не требуют обслуживания благодаря запатентованной смазке в ванне. Убедите себя!Что такое линейные двигатели?
Линейный двигатель — это приводное решение, отличающееся от вращательного двигателя: в отличие от вращательного двигателя, линейный двигатель не создает вращательного движения для приводимого в движение объекта. Вместо этого он перемещает объект по прямой линии или по криволинейной траектории. Линейный двигатель используется, когда динамика, обеспечиваемая вращающимся серводвигателем, недостаточна и вместо него необходимо реализовать прямое поступательное движение (линейное движение). Так обстоит дело, например, если приложения должны приводиться в действие напрямую (линейные двигатели) или включать процессы точной регулировки (линейные цилиндры).
Как работает линейный двигатель?
Функциональный принцип линейных двигателей основан на принципе вращательных двигателей . В отличие от приводов вращения, в линейном двигателе движется активная часть, на которую подается ток, а электрически пассивная часть остается в состоянии покоя.
В этом случае «электрически пассивный» означает, что магнитное поле обычно создается постоянными магнитами, которые можно расположить в любом порядке. Реактивные силы должны поглощаться основанием машины или системой.В то время как вращательным двигателям требуются передаточные элементы, такие как ремни, цепи и т.п., чтобы опосредованно выполнять поступательное движение из вращательного движения, линейные приводы позволяют осуществлять движение и силу подачи напрямую. Поэтому линейные двигатели обозначаются как прямые приводы .
Линейные двигатели могут достигать очень высокого ускорения (до 6 g) и скорости движения до 13 м/с (48 км/ч). В результате они особенно подходят для использования в станках, системах позиционирования и перемещения, а также в обрабатывающих центрах.
Наверх
Линейные серводвигатели SEW-EURODRIVE
SEW-EURODRIVE предлагает высококачественные приводные решения с практически неизнашиваемыми и не требующими технического обслуживания синхронными линейными серводвигателями SL2 .
Прямые приводы с конвекционным охлаждением или принудительным воздушным охлаждением особенно хорошо подходят для задач по перемещению, захвату и перемещению и синхронной обработке. У нас вы можете приобрести первоклассные линейные двигатели, которые идеально подходят для ваших задач.Наверх
Что такое линейные цилиндры?
Линейные или электрические цилиндры представляют собой переменные электрические агрегаты , которые могут перемещать шток вперед и назад по прямой линии. Электрические цилиндры также являются высокопроизводительной альтернативой пневматическим или гидравлическим цилиндрам.
В электроцилиндрах приводом служит электродвигатель. Часто это серводвигатель. В некоторых случаях двигатель соединен с редуктором; однако обычно двигатель производит движение непосредственно через шпиндель с резьбой. Шпиндель можно перемещать внутрь и наружу посредством вращения против часовой стрелки и по часовой стрелке. Движение ограничивается самим приложением, а иногда и концевым выключателем.
Электрические цилиндры могут использоваться для осевых сил и/или сил сжатия. По сравнению с гидравлическими или пневматическими цилиндрами, электрические цилиндры очень легко установить , поскольку энергия должна подаваться только в виде тока – нет необходимости в дорогостоящих генераторах давления. Электрические цилиндры также обычно более компактны, чем две другие конструкции , и поэтому их проще интегрировать. Кроме того, вы обычно получаете экономическая выгода при использовании электрических цилиндров, поскольку отпадает вся секция высокого давления (энергия, подготовка, шланги и т. д.). В то время как гидравлическим и пневматическим цилиндрам по-прежнему требуется давление для удержания положения в состоянии холостого хода, электрические цилиндры, как правило, являются самоблокирующимися благодаря шагу резьбы шпинделей. Это позволяет им оставаться в определенном положении. Их компактность достигается следующими способами:
- Благодаря короткому шпинделю в осе-последовательном исполнении
- Благодаря высокому уровню интеграции двигателя (и редуктора)
- Или благодаря осепараллельной конструкции, в которой двигатель устанавливается над приводными шпинделями (и при необходимости соединяется с редуктором)
Наверх
Электроцилиндры от SEW‑EURODRIVE
SEW‑EURODRIVE предлагает электрические цилиндры с консистентной и масляной смазкой в CMS.
серии. . Запатентованная смазка в ванне обеспечивает пожизненную смазку. Поэтому нет необходимости повторно смазывать резьбовые шпиндели.Наверх
Линейные двигатели, линейное перемещение | SEW‑ЕВРОДРАЙВ
Наши линейные серводвигатели SL2 или электрические цилиндры CMS.. обеспечивают необходимое линейное движение в высокодинамичных системах автоматизации. Более того, в серии SL2 отсутствуют компоненты механической трансмиссии и быстроизнашивающиеся детали.
Благодаря роторам с постоянными магнитами наши электрические цилиндры увеличивают мощность в пять раз быстрее, чем обычные пневматические цилиндры, и не требуют обслуживания благодаря запатентованной смазке в ванне. Убедите себя!Что такое линейные двигатели?
Линейный двигатель — это приводное решение, отличающееся от вращательного двигателя: в отличие от вращательного двигателя, линейный двигатель не создает вращательного движения для приводимого в движение объекта.
Вместо этого он перемещает объект по прямой линии или по криволинейной траектории. Линейный двигатель используется, когда динамика, обеспечиваемая вращающимся серводвигателем, недостаточна и вместо него необходимо реализовать прямое поступательное движение (линейное движение). Так обстоит дело, например, если приложения должны приводиться в действие напрямую (линейные двигатели) или включать процессы точной регулировки (линейные цилиндры).Как работает линейный двигатель?
Функциональный принцип линейных двигателей основан на принципе вращательных двигателей . В отличие от приводов вращения, в линейном двигателе движется активная часть, на которую подается ток, а электрически пассивная часть остается в состоянии покоя. В этом случае «электрически пассивный» означает, что магнитное поле обычно создается постоянными магнитами, которые можно расположить в любом порядке. Реактивные силы должны поглощаться основанием машины или системой.
В то время как вращательным двигателям требуются передаточные элементы, такие как ремни, цепи и т.
п., чтобы опосредованно выполнять поступательное движение из вращательного движения, линейные приводы позволяют осуществлять движение и силу подачи напрямую. Поэтому линейные двигатели обозначаются как прямые приводы .Линейные двигатели могут достигать очень высокого ускорения (до 6 g) и скорости движения до 13 м/с (48 км/ч). В результате они особенно подходят для использования в станках, системах позиционирования и перемещения, а также в обрабатывающих центрах.
Наверх
Линейные серводвигатели SEW-EURODRIVE
SEW-EURODRIVE предлагает высококачественные приводные решения с практически неизнашиваемыми и не требующими технического обслуживания синхронными линейными серводвигателями SL2 . Прямые приводы с конвекционным охлаждением или принудительным воздушным охлаждением особенно хорошо подходят для задач по перемещению, захвату и перемещению и синхронной обработке. У нас вы можете приобрести первоклассные линейные двигатели, которые идеально подходят для ваших задач.
Наверх
Что такое линейные цилиндры?
Линейные или электрические цилиндры представляют собой переменные электрические агрегаты , которые могут перемещать шток вперед и назад по прямой линии. Электрические цилиндры также являются высокопроизводительной альтернативой пневматическим или гидравлическим цилиндрам.
В электроцилиндрах приводом служит электродвигатель. Часто это серводвигатель. В некоторых случаях двигатель соединен с редуктором; однако обычно двигатель производит движение непосредственно через шпиндель с резьбой. Шпиндель можно перемещать внутрь и наружу посредством вращения против часовой стрелки и по часовой стрелке. Движение ограничивается самим приложением, а иногда и концевым выключателем. Электрические цилиндры могут использоваться для осевых сил и/или сил сжатия.
По сравнению с гидравлическими или пневматическими цилиндрами, электрические цилиндры очень легко установить , поскольку энергия должна подаваться только в виде тока – нет необходимости в дорогостоящих генераторах давления.
Электрические цилиндры также обычно более компактны, чем две другие конструкции , и поэтому их проще интегрировать. Кроме того, вы обычно получаете экономическая выгода при использовании электрических цилиндров, поскольку отпадает вся секция высокого давления (энергия, подготовка, шланги и т. д.). В то время как гидравлическим и пневматическим цилиндрам по-прежнему требуется давление для удержания положения в состоянии холостого хода, электрические цилиндры, как правило, являются самоблокирующимися благодаря шагу резьбы шпинделей. Это позволяет им оставаться в определенном положении. Их компактность достигается следующими способами:- Благодаря короткому шпинделю в осе-последовательном исполнении
- Благодаря высокому уровню интеграции двигателя (и редуктора)
- Или благодаря осепараллельной конструкции, в которой двигатель устанавливается над приводными шпинделями (и при необходимости соединяется с редуктором)
Наверх
Электроцилиндры от SEW‑EURODRIVE
SEW‑EURODRIVE предлагает электрические цилиндры с консистентной и масляной смазкой в CMS.
серии. . Запатентованная смазка в ванне обеспечивает пожизненную смазку. Поэтому нет необходимости повторно смазывать резьбовые шпиндели.Наверх
Линейный привод. Основы, терминология и определения — DINGS’ Motion USA
ОБЗОР ТЕХНОЛОГИИ
Одним из наиболее распространенных методов перемещения груза из точки А в точку В является линейное перемещение двигателя с помощью механического ходового винта и орех. Этот раздел предназначен для того, чтобы помочь и освежить ваше понимание основных принципов технологии ходового винта перед выбором системы, которая лучше всего подходит для вашего приложения. Пожалуйста, также обратитесь к Глоссарию (стр. 85 каталога), чтобы помочь вам понять.
Вот некоторые основные соображения по проектированию:
Какова нагрузка вашей системы?
С какой скоростью нужно двигаться из пункта А в пункт Б?
Какое расстояние нужно проехать?
Сколько времени потребуется, чтобы добраться из пункта А в пункт Б?
Какая точность требуется для вашего приложения?
Какая повторяемость требуется для вашего приложения?
Горизонтальная или вертикальная ориентация?
Объяснение основ
ВЫХОД VS ШАГ
Шаг — это осевое расстояние между резьбами.
Шаг равен шагу одиночного пускового винта. На одном винте может быть более одной нити резьбы. Это так называемые старты. Многозаходные ходовые винты обычно более стабильны и эффективны при передаче мощности. на винте. В этом каталоге термин «шаг» будет использоваться для обозначения винта, поскольку это линейное расстояние, пройденное за один оборот винта. Чем больше шаг, тем большее линейное расстояние проходит винт за один оборот.НАГРУЗКА
Обычно выражается либо в фунтах ИЛИ в кг для перемещения, либо в фунтах силы (lbsF) или в кгс для тяги.
СКОРОСТЬ (В)
Обычно измеряется как дюймы в секунду (мм/сек), необходимые для вашего применения.
РАССТОЯНИЕ
Требуемое расстояние перемещения обычно выражается в дюймах или миллиметрах.
ВРЕМЯ (T)
Обычно измеряется в секундах. Период времени, необходимый для прохождения заданного расстояния, определяет скорость, ускорение (A) и замедление, необходимые для достижения заданного положения.
ГОРИЗОНТАЛЬНОЕ ИЛИ ВЕРТИКАЛЬНОЕ ПРИМЕНЕНИЕ
При вертикальной ориентации возникает потенциальная проблема обратного хода при отключенном питании двигателя и без установленного тормоза. Вертикальные установки также имеют дополнительный коэффициент гравитации, который должен учитываться при расчете нагрузки/силы.
ТОЧНОСТЬ ВИНТА
Определяется как измерение заданной длины винта. Например: 0,0006 дюйма на дюйм. Точность опережения — это разница между фактически пройденным расстоянием и теоретическим расстоянием, пройденным на основе упреждения. Например: винт с ходом 0,5 дюйма и точностью шага 0,004 дюйма на фут, повернутый 24 раза, теоретически перемещает гайку на 12 дюймов. Однако при точности опережения 0,004 дюйма на фут фактическое перемещение может составлять от 11,9от 96 до 12,004 дюйма.
ОБЩЕЕ УКАЗАННОЕ БИЕНИЕ
Величина «колебания» вокруг центральной линии винта.
ПОВТОРЯЕМОСТЬ
Большинство приложений для перемещения придают наибольшее значение повторяемости (по сравнению с точностью винта) системы для достижения одной и той же заданной позиции снова и снова.
Например: Повторяемость ± 0,005 дюйма означает, что после повторных команд для достижения одного и того же целевого положения линейная ошибка будет не более ± 0,005 дюйма.НАГРУЗКА РАСТЯЖЕНИЯ ИЛИ СЖАТИЯ
Нагрузка, которая стремится растянуть винт, называется нагрузкой растяжения. Нагрузка, которая имеет тенденцию «сжимать» или сжимать винт, называется сжимающей нагрузкой. В зависимости от размера нагрузки при проектировании винта на растяжение используется осевая прочность винта по сравнению с нагрузкой на колонну.
РАДИАЛЬНАЯ НАГРУЗКА
Нагрузка, перпендикулярная винту. Это не рекомендуется, если не используется дополнительная механическая поддержка, такая как линейная направляющая.
ОСЕВАЯ НАГРУЗКА
Нагрузка, действующая на центральную линию ходового винта.
СТАТИЧЕСКАЯ НАГРУЗКА по сравнению с ДИНАМИЧЕСКАЯ НАГРУЗКА
Статическая нагрузка – это максимальная осевая нагрузка, включая ударную нагрузку, которая должна быть приложена к неподвижному винту.
Динамическая нагрузка — это максимально рекомендуемая осевая нагрузка, которая должна прилагаться к винту во время движения.
Нажмите, чтобы узнать больше о статической нагрузке и динамической нагрузке.
ОБРАТНЫЙ ВВОД
Обратный ход — это результат осевого давления нагрузки на винт или гайку для создания вращательного движения.
Как правило, гайка с КПД более 50% имеет тенденцию к обратному ходу. Выбор ходового винта
с эффективностью ниже 35% может предотвратить обратный ход. Чем меньше упреждение, тем меньше вероятность обратного хода. Нажмите, чтобы узнать больше о обратном движении.КРУТЯЩИЙ МОМЕНТ
Крутящий момент двигателя, необходимый для привода только узла ходового винта, составляет:
- Инерционный крутящий момент
- Крутящий момент (трение гайки и винта при движении)
- Крутящий момент для перемещения груза
СМАЗКА
Материал гайки содержит самосмазывающийся материал, который устраняет необходимость добавления смазки.
к системе. Винт с тефлоновым покрытием также снижает трение и продлевает срок службы системы.ОБРАБОТКА КОНЦА ВИНТА
Доступны стандартные метрические или английские параметры. Индивидуальные спецификации обработки концов также доступны на
запрос.ФИКСИТИ
Производительность (скорость и эффективность) винтовой системы зависит от того, как расположены концы винтов.
прилагается и поддерживается.ПРОЧНОСТЬ КОЛОННЫ
Когда винт нагружен на сжатие, его предел упругой устойчивости может быть превышен, и винт
выйти из строя из-за изгиба или коробления.КРИТИЧЕСКАЯ СКОРОСТЬ
Критическая скорость – это скорость вращения винта, при которой достигается первая гармоника резонанса.
из-за отклонения винта.
На этих скоростях система будет вибрировать и станет нестабильной.
Несколько переменных влияют на то, как быстро система достигнет критической скорости:- Ход винта
- Скорость вращения
- Конечная фиксация
- Осевая нагрузка
- Диаметр винта
- Нагрузка на растяжение или сжатие
Например, в следующей таблице показано, что для винта диаметром 3/4 дюйма и длиной 70 дюймов
порог критической скорости 700 об/мин.ЗАТВОР
Люфт — это относительное осевое перемещение между
винт и гайка в состоянии покоя. Это нормально для
люфт увеличивается с износом с течением времени. Компенсация или коррекция люфта может
быть реализована за счет применения
гайка против люфта. люфт обычно бывает только
проблема с двунаправленным позиционированием.ТИПЫ СИСТЕМ ЛИНЕЙНОГО ДВИЖЕНИЯ
- A. Свободный
- B. Внешний линейный
- C. Пленник
ПОЧЕМУ ВЫБИРАЮТ ОДИН ФОРМ-ФАКТОР ДРУГИМ?
Какое механическое соединение лучше всего подходит для вашего применения?
Как вы планируете крепить винт?
Допустимо ли вращение винта?
Требуется ли для вашего приложения энкодер или тормоз?
Каков ход вашего приложения?
КАКИЕ ЭКОЛОГИЧЕСКИЕ ЗАБОТЫ ВЫ ПРИНИМАЕТЕ?
Системы линейного перемещения DINGS’ Motion USA предназначены для работы в сухих и неагрессивных средах.
Стандартные продукты не имеют рейтинга IP. Эксплуатация линейных систем без степени защиты IP в грязных или агрессивных средах значительно сокращает срок службы изделия.ТЕМПЕРАТУРА
Очень высокие или низкие температуры могут вызвать значительные изменения в посадке гаек или усилии сопротивления.
МАКСИМАЛЬНАЯ ДИНАМИЧЕСКАЯ НАГРУЗКА
Каждый двигатель типоразмера NEMA имеет максимальную механическую нагрузку, которую нельзя превышать. Дополнительные сведения см. в разделе Кривые скорости/силы для отдельных размеров рамы.
ВЫБОР ДВИГАТЕЛЯ
Чтобы выбрать правильную комбинацию двигатель/ходовой винт с ходовым винтом, необходимо учитывать несколько факторов:
Сколько силы требуется?
Каков желаемый угол шага?
Требования к фиксации или удерживающей силе?
Ограничения по физическому размеру?
Какой тип драйвера (усилителя) вы используете?
Руководство по выбору продукции
Чтобы уменьшить сложность и стоимость конструкции, важно точно определить размер комбинации двигатель/ходовой винт.
Ниже приведены несколько простых шагов по выбору необходимых компонентов для данного приложения.Шаг 1 – Выбор размера двигателя NEMA (требования к усилию)
Вот общий обзор выходной тяги в зависимости от размера NEMA:
По мере увеличения типоразмера двигателя NEMA выходная тяга привода соответственно увеличивается.
Шаг 2. Выбор шага винта (требования к силе и скорости)
После оценки требуемой тяги и выбора размера NEMA, который может соответствовать вашему приложению, скорость и
ускорение нагрузки необходимо учитывать и оценивать, чтобы выбрать подходящий шаг винта.Из-за особенностей ходового винта выходная скорость и выходное усилие, достижимые двигателем/ходовым винтом
являются двумя обратно пропорциональными переменными (т. е. увеличение требуемой тяги снизит достижимую
скорость для комбинации двигатель/ходовой винт). Следовательно, максимальная выходная сила системы снижается на
приложений, требующих более высоких скоростей.Для получения полных данных по выбору двигателя/ходового винта см. кривые скорости/усилия для каждого типоразмера NEMA.
Несмотря на то, что эти два шага обеспечивают прочную основу для выбора двигателя/ходового винта, необходимо учитывать и другие переменные.
учитывать:- Рабочий цикл
- Желаемый срок службы системы
- Экологические соображения
- Позиционная повторяемость
- Допустимый люфт
- Требования к ускорению/торможению
- Характеристики драйвера
- Вертикальная или горизонтальная ориентация
Из-за многочисленных переменных, влияющих на выбор двигателя, пользователям настоятельно рекомендуется
приступить к физическим испытаниям, чтобы точно определить комбинацию двигателя и ходового винта, необходимую для данного
заявление.ПРИМЕЧАНИЕ: Несмотря на то, что этот раздел предназначен для предоставления приблизительного руководства по выбору комбинации двигатель/ходовой винт,
лучше всего подходит для приложения, мы рекомендуем связаться с нашим инженерным персоналом для получения дополнительной помощи в процессе выбора двигателя.Трапециевидное перемещение по сравнению с треугольным профилем перемещения
Обычно есть два широко используемых профиля движения. В зависимости от необходимого времени и расстояния в пути,
можно использовать различные профили движения. Площадь под кривыми ниже представляет собой минимальный ход
линейный привод, его требуемый ход.Обзор технологии
Гибридные шаговые двигатели сочетают в себе лучшие характеристики шаговых двигателей с переменным магнитным сопротивлением и шаговых двигателей с постоянными магнитами. Поскольку они демонстрируют высокий статический и динамический крутящий момент и работают с очень высокой частотой шагов, гибридные шаговые двигатели используются в самых разных промышленных приложениях.
Гибридные шаговые двигатели — это высокоточные двигатели с цифровым управлением, способные обеспечить долгие годы надежной работы.
Работа двигателя управляется электрическими импульсами. Направление тока, протекающего через обмотки двигателя, меняется с каждым импульсом. Электрический импульс преобразуется во вращение вала с шагом фиксированного угла. Вместе с драйвером он представляет собой систему с разомкнутым контуром, экономичную и простую в изготовлении.Гибридные шаговые двигатели благодаря своей конструкции имеют более низкую стоимость, чем серводвигатели. Системы с шаговыми двигателями не требуют настройки, допускают большее несоответствие инерции и имеют очень высокую плотность крутящего момента. Этот крутящий момент доступен на 100% сразу после запуска, что может быть очень выгодно при выполнении коротких быстрых перемещений или в сочетании с высокими инерционными нагрузками. Поскольку шаговые двигатели являются синхронными двигателями с большим количеством полюсов, они могут плавно работать на очень низких скоростях с небольшими пульсациями крутящего момента. Эти точные, высоконадежные двигатели применяются в тысячах приложений в таких отраслях, как медицина, автоматизация лабораторий, сборка электроники и упаковка.
Популярные на протяжении десятилетий, эти системы будут по-прежнему популярны среди инженеров-конструкторов.БИПОЛЯРНЫЕ И ОДНОПОЛЯРНЫЕ ШАГОВЫЕ ДВИГАТЕЛИ
Все двигатели в этом каталоге биполярные. Биполярные двигатели имеют по одной обмотке на фазу. Чтобы изменить магнитный полюс, необходимо изменить направление тока в обмотке. Следовательно, схема возбуждения более сложна и обычно использует схему Н-моста. Потому что обмотки лучше
используемые, они более мощные, чем униполярный двигатель того же размера. В униполярном двигателе вдвое больше медных проводов в одном и том же пространстве, но в любой момент времени используется только половина, поэтому его эффективность составляет 50%.ДВУХПОЛЯРНЫЙ ПРИВОД ИЗМЕЛЬЧИТЕЛЯ
Драйверы с биполярным прерывателем на сегодняшний день являются наиболее широко используемыми драйверами для промышленных приложений.
Хотя они
как правило, более дорогие в разработке, они обеспечивают высокую производительность и высокую эффективность.
В них также используется четырехтранзисторный мост с рециркуляционными диодами и чувствительный резистор, поддерживающий
напряжение обратной связи пропорционально току двигателя. Кривые производительности двигателя в этом каталоге были
разработан с использованием привода биполярного прерывателя.КРУТЯЩИЙ МОМЕНТ
Измеряется путем разгона двигателя до желаемой скорости и последующего увеличения крутящего момента до тех пор, пока
двигатель глохнет или пропускает шаги. Это измерение проводится в широком диапазоне скоростей и
результаты используются для создания динамической кривой скорости/крутящего момента. На эту кривую влияет напряжение привода
и управлять током. Все кривые производительности в этом каталоге построены с использованием этого метода.ТОЧНОСТЬ ДВИГАТЕЛЯ
Приблизительно ± 3 угловых минуты (0,05 градуса)
Эта ошибка не накапливается от шага к шагу. Когда стандартный шаговый двигатель с шагом 1,8 градуса перемещается на один
шаг будет идти 1,8 градуса ± 0,05 градуса. Если тот же мотор проедет миллион шагов, он проедет 1,
800 000 градусов ± 0,05 градуса. Ошибка не накапливается.ФАЗНАЯ ИНДУКТИВНОСТЬ (МГн)
Шаговые двигатели имеют разную степень индуктивности. Двигатель с высокой индуктивностью обеспечивает
больший крутящий момент на низких скоростях и меньший крутящий момент на более высоких скоростях.
ФАЗОВОЕ СОПРОТИВЛЕНИЕ (ОМ)
Значение терминального сопротивления двигателя, указанное на горячей обмотке, которое является максимальным для двигателя.
номинальная температура.УДЕРЖИВАЮЩИЙ МОМЕНТ
Максимальный крутящий момент, который можно приложить к валу шагового двигателя извне, не вызывая
непрерывное вращение, когда одна или несколько фаз двигателя находятся под напряжением.СТОПОРНЫЙ МОМЕНТ
Крутящий момент, необходимый для вращения выходного вала двигателя без подачи тока на обмотки.
РАДИАЛЬНАЯ НАГРУЗКА
Нагрузка, приложенная перпендикулярно валу двигателя (должна быть минимизирована).ОСЕВАЯ НАГРУЗКА
Размер корпуса NEMA и диапазон удерживающего момента
Обзор выбора фазы
Примечание:
- •• Также доступен угол шага 0,9 °
- Основной угол двухфазного двигателя 1,8°
- Основной угол трехфазного двигателя 1,2°
- Базовый угол 5-фазного двигателя 0,72°
Общие характеристики
СООБРАЖЕНИЯ ПО ПРИМЕНЕНИЮ
Чтобы правильно выбрать двигатель, необходимо учитывать несколько факторов:
- Какой крутящий момент требуется?
- Каков желаемый угол шага? (разрешение)
- Какова требуемая скорость при номинальном крутящем моменте? (об/мин)
- Требования к фиксирующему или удерживающему моменту
- Ограничения по физическому размеру?
- Какой тип драйвера (усилителя) вы используете?
- Экологические соображения?
ЭКОЛОГИЧЕСКИЕ ВОПРОСЫ
Системы линейного перемещения DINGS предназначены для работы в сухих и неагрессивных средах.
Эксплуатация двигателя в условиях загрязнения, коррозии или чрезвычайно высокой температуры
среды значительно сократит срок службы изделия и может привести к аннулированию гарантии.
Использование системы выбора продуктов вместе со соответствующими страницами размеров корпуса двигателя Nema в следующем
разделы, затем вы сможете перейти к конкретным номерам деталей для выбора шагового двигателя.Обзор выбора продукции
РАЗМЕР ДВИГАТЕЛЯ NEMA
Основано на стандартах, установленных Национальной ассоциацией производителей электрооборудования (NEMA).
Размер двигателя определяется габаритным размером фланца двигателя.
Например, двигатель NEMA 23 имеет площадь около 2,3 квадратных дюймов на монтажном фланце.ГИБРИДНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ
Гибридный шаговый двигатель является наиболее широко используемым и сочетает в себе принципы постоянного магнита.
и двигатели с переменным сопротивлением.КОЛИЧЕСТВО ЭЛЕКТРИЧЕСКИХ ФАЗ ДВИГАТЕЛЯ
2, 3 или 5 фазы. 2-х фазный — самый распространенный.
Потенциальными преимуществами 5-фазного двигателя являются более высокое разрешение, более низкий акустический шум,
более низкий рабочий резонанс и более низкий фиксирующий момент.
Трехфазный двигатель представляет собой нечто среднее между двухфазным и пятифазным шаговым двигателем.УГОЛ ШАГА
Угол шага двигателя определяется как угол, пройденный одним двигателем за один полный шаг.
Например, угол шага 1,8 ° будет иметь 200 полных шагов на оборот.
360/1,8 = 200ДЛИНА ДВИГАТЕЛЯ
Определяется количеством стаканов или стопок ротора.
Дополнительные стеки и длина = больший крутящий момент, но на компромиссе.
Зависит от приложения; например, более длинный двигатель имеет более высокий крутящий момент на низкой скорости, но при
за счет быстрого реагирования и более высоких скоростей. Инерция ротора также увеличивается с более длинными двигателями.НОМИНАЛЬНЫЙ ТОК/ФАЗНЫЙ
Чем выше ток/фаза, тем выше производительность. Драйвер двигателя (усилитель) также может определять
какой ток выбрать.КОЛИЧЕСТВО ПРОВОДОВ
Шаговые двигатели обычно поставляются с 4, 6 или 8 проводами. С биполярным драйвером есть 4 подключения к
мотор. Подключить 4-проводной двигатель несложно. При использовании двигателей с 8 выводами катушки могут
либо последовательно, либо параллельно.
Конфигурация проводов
Последовательное соединение обеспечивает более высокую индуктивность и, следовательно, более высокую производительность при низких скоростях. Параллельное соединение снизит индуктивность, но увеличит крутящий момент при более высоких скоростях.
Шестипроводной шаговый двигатель с последовательными обмотками
Восьмипроводной шаговый двигатель с параллельными обмотками
Восьмипроводной шаговый двигатель с последовательными обмотками
КОНФИГУРАЦИЯ ВАЛА
Одиночный или двойной
Если необходимо установить энкодер или тормоз, потребуется двойной вал (задний)ДОПОЛНИТЕЛЬНЫЙ ДАТЧИК
Если необходимо подтвердить достигнутое положение обратно контроллеру движения, потребуется энкодер.
Разрешение (или количество строк) кодировщика будет зависеть от приложения.