Содержание
Чем интересен квадрокоптер с бесколлекторными двигателями
Содержание
- 1 Технические особенности силовых агрегатов
- 1.1 Особенности
- 2 Ключевые факторы производительности
- 3 Особенности выбора
- 3.1 Размеры
- 4 Самостоятельная реализация
- 5 Модели двигателей и коптеров
Квадрокоптеры или дроны – довольно распространенные технические устройства, которые все больше распространяются в разнотипных сферах деятельности. Устанавливаются в них преимущественно бесколлекторные электродвигатели, которые обладают особой компактностью конструкции и высокой продуктивностью.
Мультикоптер с бесщеточным двигателем
Бесколлекторные силовые агрегаты относятся к уникальному типу силовых агрегатов, применяемых в маломощных портативных приложениях, к которым относятся квадрокоптеры. Несмотря на малые габариты устройств, в процессе работы они демонстрируют высокие эксплуатационные показатели и надежность при нагрузках. Исходя из особенностей применения, бесщеточные моторы для дронов обладают своими особенностями, которые обеспечивают самим машинам хорошие показатели.
Исходя из особенностей применения, бесщеточные моторы для дронов обладают своими особенностями, которые обеспечивают самим машинам хорошие показатели.
Технические особенности силовых агрегатов
Как можно понять из наименования мотора – отсутствие в конструкции коллектора – механического прибора, который отвечает за переключение токов между медными обмотками. В бесщеточной конструкции эта особенность возложена на схему управления. Исходя из этого, точное число деталей движущегося и трущегося типов сводится к минимуму. Рабочие режимы электрических компонентов дополнительно настраиваются еще на производстве, благодаря чему компоненты обладают высокими показателями результативности.
Особенности
Именно этими особенностями и обусловливаются преимущества силовых агрегатов данного типа. К сильным сторонам двигателей относят:
- увеличенный коэффициент полезного действия, который положительно сказывается на летных параметрах квадрокоптеров;
- автономность – еще одна важная черта, обусловливаемая техническими характеристиками;
- регулировка показателей тяговой мощности осуществляется точнее и быстрее, если сравнивать с коллекторными модификациями;
- долговечность работы моторов бесколлекторного типа в квадрокоптерах обусловливается упрощенной конструкцией, элементы которой не так интенсивно изнашиваются, по сравнению с коллекторными;
- отсутствие искрения в процессе эксплуатации.
 Этот параметр важен для коптеров профессионального назначения, которые используются в пожароопасных средах и в особых промышленных приложениях.
Этот параметр важен для коптеров профессионального назначения, которые используются в пожароопасных средах и в особых промышленных приложениях.
 Этот параметр важен для коптеров профессионального назначения, которые используются в пожароопасных средах и в особых промышленных приложениях.
Этот параметр важен для коптеров профессионального назначения, которые используются в пожароопасных средах и в особых промышленных приложениях.К недостаткам квадрокоптерных моторов относят:
- сложность реализации;
- сравнительно высокую цену.
Как можно видеть, недостатков на порядок меньше, чем преимуществ, да и современные технологии позволяют создавать принципиально новые вариации, которые будут и дешевле и проще в реализации. Новейшие агрегаты используются даже в квадрокоптерах начального уровня, подходящие для управления даже подросткам.
Ключевые факторы производительности
Технически, мощность бесколлекторных силовых агрегатов с возможностью дистанционного управления реализуется в виде скорости, которую мотор демонстрирует при вращении для каждого показателя напряжения. Токи питания прикладываются непосредственно к двигателю.
Все силовые агрегаты для коптеров обладают своеобразным рейтингом kV. Он указывает на скорость кручения пропеллеров с той или иной модификацией агрегата управления. Наибольшее число оборотов за 1 минуту, которое может обеспечить мотор, можно посчитать, умножив kV на уровень напряжения аккумуляторной батареи.
Он указывает на скорость кручения пропеллеров с той или иной модификацией агрегата управления. Наибольшее число оборотов за 1 минуту, которое может обеспечить мотор, можно посчитать, умножив kV на уровень напряжения аккумуляторной батареи.
К примеру, если мотор с рабочей мощностью в 2300 кВ с аккумуляторным двигателем квадрокоптера типа 3S, подсоединенным к его концам, то агрегат будет вращаться со скоростью, 28980 оборотов в минуту. Значение получилось путем вычислений:
2300 * 12,60 = 28980.
12,60 – напряжение питания, подаваемое на агрегат.
Для модификации 4S lipo с аналогичной мощностью показатель силы питания 14,8 вольт, поэтому скорость равна 34040, исходя из того, что 2300 * 14,8.
EMAX GT2218-09 1100KV
Особенности выбора
Бесщеточные моторы, как и агрегаты других типов обладают широким перечнем конструктивных особенностей, которые стоит учитывать при выборе. Далее мы рассмотрим ключевые факторы подбора.
Более высокое значение kV указывает на меньший уровень сопротивления и, соответственно, более высокое потребление тока питания, и сниженный коэффициент полезного действия. Низкий же показатель kV указывает на противоположную ситуацию: высокий КПД и сопротивление, сниженное потребление электрического тока.
Низкий же показатель kV указывает на противоположную ситуацию: высокий КПД и сопротивление, сниженное потребление электрического тока.
Размеры
Первый фактор – габариты подбираемой модели, показатель, который обусловливает удобство монтажа и эксплуатации силового агрегата. Большинство производителей установили стандартные принципы маркировки моторов, чтобы упростить процесс подбора. Как правило, такие схемы наименования включают в себя 4 цифры, которые расшифровываются довольно просто. Первые две цифры – показатели диаметра статора в миллиметрах, третья и четвертая – высота. Давайте же рассмотрим несколько примеров таких индексов и укажем, для квадрокоптеров какого именно типа они применяются.
Типы маркировок и их описание:
- 1806 – самые простые моторы, устанавливаемые в минидронах, совмещаются с пропеллерами на 3 или 4 дюйма;
- 2204 – одни из самых технически простых схем, легко устанавливаются и обслуживаются. На них монтируются пятидюймовые пропеллеры;
- 2205 – используются для монтажа также пропеллеров на 5 дюймов, трехлопастного типа;
- 2206 – относительно новая, набирающая популярность модификация, обладает большими габаритами, что обусловливается увеличением показателя мощности на 15% по сравнению с предыдущей модификацией 2205;
- 2207 – 2407 – на сегодняшний день самые мощные агрегаты, демонстрируют уровень тяги от 20 до 50% чем уже известный нам 2205. Также постепенно набирают популярность, как у профессионалов, так и у любителей.
 На них монтируются пятидюймовые пропеллеры;
На них монтируются пятидюймовые пропеллеры;Самостоятельная реализация
Конструкция бесщеточных моторов для квадрокоптеров позволяет проводить всяческую их модификацию, изменение функционала, или же создание мотора своими руками. Одно из самых распространенных действий – переделка крупного соосника под мотор бесколлеткорного типа. Такой модернизации поддаются практически все версии двигателей, рассмотрим некоторые особенности модели F1818.
Агрегаты обладают мощностью в 3600 kV, внешний диаметр компонентов – 18 миллиметров, показатель вала — 2,3 –мм. Моторы устанавливаются и фиксируются посредством трех винтов (вместо привычных двух), поэтому конструкторы зачастую изготавливают элементарные переходники. Проще всего для этого использовать П-подобные профили из алюминия. Соединение реализуется при помощи такой схемы: выходы каналов и гироскопа подсоединяются к входам головного устройства, чьи выходы в то время подсоединяются к регуляторным входам. Провод с током плюсового типа у любого регулятора отключаются от разъемов, для избегания несовместимости по питанию.
Генератор из бесколлекторного двигателя от квадрокоптера пример
Создать генератор из двигателя – еще одна интересная тех задумка. Реализуется она при помощи внесения технических изменений в технические параметры мотора. Для начала стоит оценить и точно измерить характеристики агрегата. Умельцы, как правило, собирают для этого вспомогательные приборы – диностенды.
Кроме него при реализации проекта генератор используются такие компоненты:
- генераторы, в большинстве ситуаций – автомобильные;
- элемент припоя;
- медные провода;
- аккумуляторная батарея в качестве источника питания;
- управленческая плата, совмещенная с регулятором оборотов.
Модели двигателей и коптеров
Бесщеточный двигатель FATJAY RC C5055 580KV
Рассмотрим же для примера несколько популярных моделей для квадрокоптеров. Первый такой бесщеточный мотор – FatJay RC C5055 580 kV. Конструкция устройства включает вал диаметром 8 мм. Агрегат разработан для эффективной регулировки мультикоптера. Длина корпуса составляет 55 мм.
Вторая модель — EMAX GT2218/09 1100KV – мотор с функцией радиоуправления, с ротором внешнего типа. 1100 кВ – номинальный показатель оборотов в минуту. С помощью модели просто вернуть в исходно положение направление движения выходного вала. Конструкция компактная, легко монтируется.
Конструкция компактная, легко монтируется.
MJX Bugs 20 EIS
MJX Bugs 20 EIS – модель квадрокоптера, оборудованная технологией GPS, Wi-Fi и передачей данных 5G. Установлен коллекторный агрегат профессионального назначения, номинальной мощностью в 2750 кВт. Мотор обеспечивает требуемую тягу и позволяет долго пребывать в работе.
Бюджетный квадрокоптер MJX B3 Bugs 3 с бесколлекторными двигателями
Квадрокоптер заказал для сына. Это его труды, я только помогал.
Обзор глазами начинающего «лётчика».
Обзор можно поделить на две условные части. Я, как обычно, сделаю необходимые фото для тех, кого интересует начинка и составные части. А сын поделиться своими впечатлениями от пользования девайсом. Ещё раз повторю, это обзор глазами начинающего «лётчика». Сразу приношу свои извинения, если где-то искажена привычная терминология.
А сын поделиться своими впечатлениями от пользования девайсом. Ещё раз повторю, это обзор глазами начинающего «лётчика». Сразу приношу свои извинения, если где-то искажена привычная терминология.
Сначала про доставку.
Углы коробки были помяты, на сам квадрокоптер это не повлияло.
По периметру упаковки фотки дрона и комплектация.
Внутри находится большой пенопластовый бокс, в котором всё аккуратно и компактно уложено.
Каждый комплект деталей упакован в отдельный полиэтиленовый пакет и зафиксирован скотчем. Даже если коробкой играть в футбол, то навряд ли начинка пострадает. Производитель позаботился о безопасности своего продукта при транспортировке.
Собственно, что было внутри:
— квадрокоптер MJX BUGS 3 (чёрный),
— 4 пропеллера + 4 запасных,
— зарядное устройство (с ненашей вилкой),
— аккумулятор 7.4V 1800mAh LiPo,
— пульт управления,
— крепление для экшн-камеры,
— 4 посадочные опоры,
— 4 защиты для пропеллеров,
— ключ, отвёртка,
— инструкция на английском языке с набором фирменных стикеров.
А вот и скан инструкции.
Спецификация с небольшими поправками тоже не помешает:
Частота радиосигнала: 2.4 ГГц.
Питание пульта: 4 × АА 1.5 В (докупаются отдельно).
Крепление экшн-камеры, адаптировано под GoPro и её аналоги.
Моторы: бесколлекторного типа MT1806 1800 KV.
Батарея: 7.4V 1800mAh 25C LiPo.
Подсветка: LED.
Время полета: до 18 минут (при средней скорости около 15 минут).
Дальность радиосигнала: 300-500 метров (в реальности не более 100м).
Время зарядки: ≈ 180минут (около 260 минут).
Размеры: 445 * 445 * 150мм.
Вес дрона без камеры (с АКБ): 414г (477г во всём снаряжении).
Ограничение по возрасту: 14+ 🙂
Проверю комплектацию.
4 защиты для пропеллеров и 4 запасных самореза. Защита устанавливается при помощи комплектных саморезов крепления двигателей. Саморезы из пакетика так и остаются в запасе.
В следующем пакете 4 посадочные опоры и 10 саморезов с широкими шляпками (2 запасных). Опоры рекомендую использовать только совместно с экшн-камерой. О возникающих проблемах в конце обзора. При посадке они защищают камеру от встречи с землёй.
Опоры рекомендую использовать только совместно с экшн-камерой. О возникающих проблемах в конце обзора. При посадке они защищают камеру от встречи с землёй.
Два идентичных комплекта пропеллеров (рабочие+запасные). Размах 190мм. При сборке нужно учитывать, что четыре пропеллера для дрона разбиты на пары и промаркированы. Два пропеллера типа А, два — типа В, крепятся к соответствующей маркировке на дроне. Пропеллеры типа А закручиваются против часовой стрелки, типа В — по часовой стрелке.
Зарядка 7,4 В 0,5 А (вилка ненаша, нужен переходник).
Крепление для экшн-камеры. Камера покупается отдельно на свой вкус. У этой версии MJX Bugs 3 крепление камеры устанавливается без использования заглушек. Оно (крепление) аккуратно вставляется и затем поворачивается ушко, тем самым фиксируя камеру.
Квадрокоптер MJX BUGS 3 (чёрный) в полиэтиленовой упаковке.
Очень большой плюс, это наличие светодиодной подсветки снизу корпуса. Тыльная часть дрона при полёте подсвечивается синим, фронтальная белым.
Так понятнее его размеры.
Квадрик немаленький. Расстояние между моторами по диагонали 310мм.
Спереди красуется аэрография глаз, придающая стильный и хищный вид квадрику, а также мощный светодиод, который даже днём отчётливо видно.
Аккумуляторный отсек расположен на «брюхе». Пластиковая стяжка крепится на четырёх саморезах.
Аккумулятор массивный.
Для тех, кто любит более продолжительные полёты, в принципе снизу можно придумать запасную самодельную сборку на 18650.
Вот только следует учесть, что разъёмы для подключения к дрону и зарядке специфичные.
Посмотрю, что внутри.
Плата управления занимает почти половину всего объёма. В неё впаян радиомодуль (в виде отдельного блока).
Плата покрыта защитным лаком (что-то типа нашей эпоксидки).
Драйверы спрятаны в чёрную термоусадку.
Собственно двигатели.
Тыльная часть дрона при полёте подсвечивается синим, фронтальная белым. Что позволяет понять ориентацию дрона в пространстве.
Для лучшего приёма антенна вынесена на «брюхо».
Пульт управления.
Он чисто белого цвета с одной красной кнопкой и парой надписей о серии дрона. Выполнен из гладкого скользкого пластика.
На тыльной стороне крышка, фиксируемая саморезом, под которой слот на четыре элемента питания типа АА. Спокойно переваривает и аккумуляторы.
Спереди четыре кнопки, одна из которых красная, остальные белые.
На лицевой панели два стика, в центре включатель/выключатель пульта, над ним окошко с зелёным светодиодом и четыре маленьких переключателя, один из которых муляж.
Рассмотрю кнопки (слева направо).
Первая белая.
Одиночное нажатие приведёт к переключению режима со скоростного на более плавный, либо наоборот. Настоятельно рекомендую учиться на плавном. Длительное нажатие приведёт к отключению/ включению подсветки квадрокоптера. Отключение актуально только если вы отлично пилотируете своим аппаратом, либо при наличии MJX goggles.
Красная.
Одиночное нажатие при опущенном левом стике — это включение моторов. Длительное нажатие -отключение.
Вторая белая.
Одиночное нажатие в комбинации с заданным направлением правым стиком приводит к выполнению флипов.
Третья белая.
Запускает видео/фотосъёмку с камеры (дополнительная опция, эта камера приобретается отдельно).
Разбираю. Вся конструкция держится на восьми саморезах.
А это «мозг».
И вот, чтобы дрон полетел, потребуется отвёртка и ключ.
В сборке дрона никаких сложностей не возникло. Описывать нет смысла. И школьник справится.
Вот такой он в полном снаряжении, с запущенными двигателями и готовый к взлёту.
Как управлять MJX Bugs 3.
При первом включении необходимо привязать пульт к коптеру. Для этого нужно зажать красную кнопку и переместить тумблер включения вверх. Зелёный индикатор (светодиод) начнёт мигать. После этого необходимо подсоединить провод питания от аккумулятора к самому дрону. Коптер замигает и пропищит. После остановки мигания дрон привязан к пульту. Для запуска двигателей необходимо опустить левый стик в самый низ и нажать красную кнопку. Коптер запустит двигатели, всё готово к первому полёту. Если после включения движков в течение 15 секунд не запустить дрон (не предпринимать попыток), то они автоматически отключатся.
Коптер замигает и пропищит. После остановки мигания дрон привязан к пульту. Для запуска двигателей необходимо опустить левый стик в самый низ и нажать красную кнопку. Коптер запустит двигатели, всё готово к первому полёту. Если после включения движков в течение 15 секунд не запустить дрон (не предпринимать попыток), то они автоматически отключатся.
Для первого полёта рекомендую ставить защиту лопастей и не ставить дополнительные опоры, причину опишу ниже. Также запуск лучше производить на большой открытой местности в ясную безветренную погоду, на травке, вне большого скопления людей (особенно детей).
Как выше было сказано, у коптера есть два стика для управления. При наклоне вверх левого стика, скорость вращения лопастей увеличится, и, как следствие, дрон начнёт отрываться от земли и набирать высоту, вниз – сила тяжести потянет к земле. Нажатие вправо-влево приведут к вращению MJX Bugs 3 вокруг своей оси на месте.
Нажатие вправо-влево приведут к вращению MJX Bugs 3 вокруг своей оси на месте.
Перехожу к правому. Тут всё проще: перемещение стика вверх приводит к перемещению вперёд, вниз – назад, а также влево/вправо интуитивно понятно.
Поначалу ориентироваться сложно.
Тем, кто управлял геймпадом в играх, будет попроще. Очень большой плюс, это наличие светодиодной подсветки снизу корпуса. Синяя символизируют тыльную часть дрона, белая – фронтальную. Даже в солнечный день не составляет труда разглядеть, какой стороной квадрик повёрнут к вам.
Как триммировать квадрокоптер
Также нужно будет проверить его ровность полёта на зависание на месте. Для этого выйдем на открытую местность в безветренную погоду и запустим на высоту полутра-двух метров над землёй. В идеале его не должно уносить в сторону, вращать и наклонять. Если происходят смещения, то нужно оттримировать с пульта полёт квадрокоптера. Как писалось ранее на пульте три триммера. Каждый из них отвечает за калибровку определённого направления движения. Левый нижний триммер отвечает за вращения, правый нижний за калибровку движения влево/вправо, правый центральный соответственно за вверх/вниз. Правило калибровки элементарное. Если ваш дрон уносит например ВЛЕВО, то вам придётся выравнивать полёт, двигая правый стик ВПРАВО. Т.к. это очень неудобно, мы несколько раз щёлкаем нижний правый триммер ВПРАВО. Если дрон уносит назад, нужно нажать на правый центральный триммер несколько раз вверх. Правило простое и легко запоминается.
Левый нижний триммер отвечает за вращения, правый нижний за калибровку движения влево/вправо, правый центральный соответственно за вверх/вниз. Правило калибровки элементарное. Если ваш дрон уносит например ВЛЕВО, то вам придётся выравнивать полёт, двигая правый стик ВПРАВО. Т.к. это очень неудобно, мы несколько раз щёлкаем нижний правый триммер ВПРАВО. Если дрон уносит назад, нужно нажать на правый центральный триммер несколько раз вверх. Правило простое и легко запоминается.
Когда батарея квадрокоптера близится к разряду, пульт начинает ежесекундно пищать, а подсветка квадрокоптера мигать. При состоянии близкому к отключению дрон замедляет вращения винтов и постепенно приземляется на землю, при этом никак не реагируя на манипуляции с пульта. Также при низком заряде батарей невозможно выполнять флипы.
Про аккумулятор.
Аккумулятор заряжался чуть более четырёх часов. Довольно долго для 15мин полёта.
У этой модели нет gps стабилизации и бародатчика, как следствие дрон не зависает в воздухе на месте. Малейший ветер, и аппарат уносит в сторону. Хотите крутые кадры, учитесь управлять им. Мне как новичку это очень сложно сделать. Всё чисто за счёт манипуляции оператора.
Малейший ветер, и аппарат уносит в сторону. Хотите крутые кадры, учитесь управлять им. Мне как новичку это очень сложно сделать. Всё чисто за счёт манипуляции оператора.
Приятно то, что есть возможность переключения со скоростного режима передвижения на плавный. Нажимаем один раз на самый левый шифт и квадрик уже плавно реагирует на команды, ещё раз – чувствуешь себя истинным гонщиком.
Пробные полёты.
Про возможность крепления камеры для съёмки видео я уже писал в обзоре. Но… при записи в полёте с Xiaomi Yi на видео “маячат” две посадочные опоры. Естественно это портит само видео. Единственный вариант — это запускать дрон с рук без прикрученных опор, что грозит повреждением самой камеры при приземлении. Либо с наклоном вперёд с захватом половины квадрокоптера, либо под небольшим углом вниз, как писалось выше с частью опор. Снять горизонтально сверху не получится. При выполнении флипов камера может изменить угол наклона, опять-таки из-за хлипкости крепления. При ручном выравнивании во время сноса ветром, дрон начинает трясти, на видео можно наблюдать. Снять что-то конкретное очень тяжело. Вам очень повезёт, если будет безветренная погода, порывы легко уносят в сторону.
Снять горизонтально сверху не получится. При выполнении флипов камера может изменить угол наклона, опять-таки из-за хлипкости крепления. При ручном выравнивании во время сноса ветром, дрон начинает трясти, на видео можно наблюдать. Снять что-то конкретное очень тяжело. Вам очень повезёт, если будет безветренная погода, порывы легко уносят в сторону.
В конце небольшое видео с камеры с жёсткой посадкой. Это парк в Тамбове возле строящегося Дворца Единоборств.
Чем чревата жёсткая посадка с прикрученными опорами.
Двигатели мощные и достаточно тяжёлые. При очень жёсткой посадке возникающее усилие рычагом ломает стрелы/лучи двигателей квадрокоптера.
Пришлось брать суперклей и накладывать шинки.
При жёстком приземлении без видеокамеры и опор ничего подобного не случается.
Подведу итог.
Плюсы:
+ бесколлекторные моторы
+ 15минут полёта
+ хорошая комплектация
+ большой ассортимент аксессуаров
+ низкая цена
+ хорошая упаковка
Минусы:
— нет gps и бародатчика
— хлипкое крепление для экшн-камеры
— при съёмке видны опоры
— гладкое покрытие пульта
Вот в общем-то и всё.
Удачи!
Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
Bayangtoys X16 дешёвый квадрокоптер с бк моторами
Содержание
- Внешний вид
- Купить Bayangtoys X16 можно в 3 комплектациях
- Лётные характеристики
- Аппаратура управления и камера
- Функциональность
- Комплектация
- Цена
- Характеристики
- Видео
Сегодня представлю вашему вниманию малоизвестный квадрокоптер Bayangtoys X16, выпущенный китайской компанией в конце июля 2016 года. А почему именно эта модель? Да потому что, это дин из самых дешёвых дронов с бесколлекторными моторами.
Внешний вид
По поводу внешнего вида особо говорить нечего, кто видел Cheerson СХ-20 тот видел BayangToys X16). Складывается ощущение что дизайнеры просто скопировали всем известную модель. Только на этом наверху расположилась, непонятно зачем, фейковая антенна (кстати такая же у квадрокоптера Aosenma CG035) . Лучи квадрокоптера сверху и снизу облеплены светодиодами, даже днём маячки хорошо видно. Большие хорошие бесколлекторные моторы и немалый вес придают квадрокоптеру уверенности.
Защита на винты у данной модели не предусмотрена, хотя здесь она нужна более чем.
Купить Bayangtoys X16 можно в 3 комплектациях
- Без камеры;
- С камерой 2 мп;
- WiFi FPV с камерой 2 мп.
Лётные характеристики
Перед полётом не забываем откалибровать аппарат. Квадрокоптер продаётся с хорошим трёхбаночным аккумулятором 2200 мАч и предполагает 15 минутное время полёта. Он достаточно резво ведёт себя в воздухе и послушно откликается на команды пилота на максимальном расстоянии 300 метров. Нареканий по управлению нет.
Нареканий по управлению нет.
Аппаратура управления и камера
Можно предположить что 2 мп. камера качеством не блещет, но крепление для неё позволяет установить 2-3 осевой подвес с какой-нибудь экшн-камерой, а это огромный плюс.
Аппаратура управления стандартная. Все кнопки на своих местах. Имеется небольшой монохромный дисплей для отображения информации. Поставляемое зарядное устройство полностью заряжает дрон в течении 3-3,5 часов. Рекомендуем приобрести более мощное устройство.
При потере связи с Bayangtoys X16 моторы не выключаются, а остаются молотить почву. Велик шанс поломки моторов.
Функциональность
- 2 режима расходов. Новичкам рекомендуется использовать пониженные расходы. Так как мощность квадрокоптера не маленькая, и большая вероятность не справиться с управлением. Профессиональным пилотам низкие расходы не интересны).
- Headles mod. Режим полезен для начинающих пилотов. Дальняя сторона квадрокоптера станет его мордой, соответственно ближняя сами понимаете чем. Таким образом управление становится понятным. Проще возвращать квадрокоптер если запутались.
- Возврат домой. При нажатии кнопки на аппаратуру управления квадрокоптер вернётся на место взлёта. Сами понимаете без GPS функция работает не всегда корректно.
- Флипы. Этот режим позволяет делать переворот на 360 градусов.
 Таким образом управление становится понятным. Проще возвращать квадрокоптер если запутались.
Таким образом управление становится понятным. Проще возвращать квадрокоптер если запутались.Комплектация
- Квадрокоптер;
- Аппаратура управления;
- Зарядное устройство;
- Пропеллеры 4+4;
- Шасси 4 шт;
- Ключ, саморезы;
- Инструкция на китайском;
- Камера.
Цена
Aliexpress
Характеристики
- Размер: 50 х 50 х 19 см;
- Ёмкость аккумулятора: 11.1 В 2200 мАч ;
- Время полёта: 15 мин;
- Питание пульта: батарейки 6 х 1,5 АА;
- Время зарядки: 200-270 мин;
- Аппаратура: 2.4 ггц;
- Вес 500 г;
- Удалённость полёта 300 м;
- 6 осевой гироскоп;
- Камера 720p hd;
- Тип двигателей: бесколлекторный;
- Гироскоп: 6 осей.

Рейтинг Bayangtoys X16
- Цена- качество
- Лётные характеристики
- Комплектация
- Дизайн
- Камера
Вывод по квадрокоптру Bayangtoys X16
Если убрать небольшие минусы Bayangtoys X16 и оставить цену и комплектацию, то квадрокоптер получается очень даже неплохой. Есть возможность использовать для съёмок да и в полёте он не скучен.
Отправка
User Review
5 (1 vote)
Видео
Будем рады, если поделитесь с друзьями:
mykvadrocopter. ru
ru
Вас приветствует команда mykvadrocopter.ru! Наше хобби — дроны. Здесь мы описываем их модели, характеристики, делимся новостями и выкладываем инструкции по применению. Вступайте в наше сообщество любителей дронов в Контакте.
Квадрокоптер своими руками / Habr
Уже прошло более полугода с того времени, как я со своими друзьями решил самостоятельно разработать и собрать квадрокоптер. Квадрокоптер представляет из себя летающую платформу с четырьмя винтами в углах. Грубо говоря, вертолёт с 4 винтами. Винты приводятся в действие бесколлекторными двигателями постоянного тока. Двигателями управляет бортовой компьютер, который получает данные о текущем положении летательного аппарата с бортовых датчиков.
Вот такая, казалось бы, простая задача отняла у нас уже более полугода, а я даже не могу заверить, что мы выполнили хотя бы половину работы. Теперь подробнее о проблемах, с которыми мы столкнулись при разработке. Может, кто-нибудь тоже надумает делать квадрокоптер дома «на коленке». Проблемы буду излагать в виде противопоставлений вида «как думалось изначально» и «как оказалось на самом деле».
Проблемы буду излагать в виде противопоставлений вида «как думалось изначально» и «как оказалось на самом деле».
Первый пенкт, с которым у нас возникли проблемы стала рама. Даже не столько проблема, сколько возможность десятка разных реализаций и причём из разных материалов. Отброшено было несколько вариантов с пластиковой, текстолитовой и алюминиевой рамами. Было предложение даже заказать готовую раму, но бюджет не позволял.( О лимитировании бюджета будет чуть позже). Оптимальным по жёсткости и весу конструкции оказалась рама из алюминиевого профиля 10 на 10 мм и квадратного куска стеклотекстолита для печатных плат толщиной 1мм. Вполне можно было бы использовать и алюминиевый уголок, но крепить к нему навесные детали квадрокоптера сложнее.
Вторым большим пунктом и, наверное, наибольшим предметом споров был «мозг» квадрокоптера, а если быть точнее, его главный мозг. Я думал, что управлять квадрокоптером будет что-то вроде простенького AVR микроконтроллера, но когда мы составили список задач, которые хотим выполнять на этом компьютере вариант с микроконтроллером отпал сам собой. Тогда вектор поиска обратился в сторону мощных одноплатных компьютеров вроде Raspberry Pi. На них и линукс поставить можно и организовать передачу видео, а это кстати тоже входит в наши планы. Тут-то впервые и был поднят вопрос о бюджете. Сначала решили скинуться втроём деньгами да и начать клепать его. На когда стало ясно, что в сто долларов ну никак не уложится, решили, что логичнее было бы обратится к нашему университету с предложением своего устройства(скорее даже разработки) взамен на финансирование проекта. Мы рассчитали бюджет по минимуму. Вот что вышло на первую вскидку:
Тогда вектор поиска обратился в сторону мощных одноплатных компьютеров вроде Raspberry Pi. На них и линукс поставить можно и организовать передачу видео, а это кстати тоже входит в наши планы. Тут-то впервые и был поднят вопрос о бюджете. Сначала решили скинуться втроём деньгами да и начать клепать его. На когда стало ясно, что в сто долларов ну никак не уложится, решили, что логичнее было бы обратится к нашему университету с предложением своего устройства(скорее даже разработки) взамен на финансирование проекта. Мы рассчитали бюджет по минимуму. Вот что вышло на первую вскидку:
— 500 грн одноплатный компьютер
— 600 грн двигатели
— 320 грн регулаторы оборотов
— 100 грн рама
— 250 грн аккумулятор
Всего получается 1770 грн, что на тот момент составляло 210 долларов. Кто в курсе того, что происходит с долларом поймёт, что сейчас рассчёт уже неактуален. особенно учитывая что батарею за такие деньги уже не взять. Хорошо, хоть успели купить двигатели и главный компьютер ещё по приемлемой цене.
Сразу обращу внимание, что это стоимость готового устройства по компонентам. НЕ УЧИТЫВАЯ стоимость разработки, в которую входят инструменты, сгоревшие детали, поездки и походы по радиорынкам, еда и питьё. Благо делаем мы это в общаге и нас подкармливают, иногда девчёнки, иногда Свят — местный кулинар. К тому же в рассчёт не была взята раличная мелочёвка, которой на текущий момент накопилось прилично: винты, коннекторы, свёрла, цанги, провода, термоусадка, датчики, опосредсвенные микроконтроллеры (ни много, ни мало 30 грн за мегу88). Обиднее всего, конечно, что иногда по неосторожности или даже просто по глупости сгорают силовые транзисторы, которые стоят по 17 грн 🙁
После того, как с бюджетом мы определилились и декан лично его утвердил, нам выдали часть денег и мы заказали Cubieboard, двигатели и винты. Рассчёт оптимального соотношения мощности двигателей, геометрии винтов и батареи для квадрокоптера мы производили тут. Этот калькулятор тогда ещё был полностью бесплатным.
Пока двигатели шли к нам из Китая встал вопрос о том, как же изготовить регуляторы оборотов для двигателей. Вариант купить сразу отпал из-за более высокой стоимости готового устройства. Если бы мы тогда значили, сколько времени уйдёт на разработку, изготовление и тестирование нашего собственного регулятора, то безоговорочно заказали бы и их из Китая тоже. Но самолюбие взяло верх и мы решили делать их сами.
Сказано — сделано, на первое время попытались сделать простенькую схему из трёх полумостов на полевых транзисторах управляемую Arduino Uno. Крутили бесколлекторный двигатель от жёсткого диска. Но хороших результатов добиться не удалось. Потом после этого схема была дважды изменена, перепаяна, выбрана совершенно другая элементная база и другие алгоритмы управления. Аж до прошлой недели у нас ничего путного не получалось. Сейчас изготовление регулятора оборотов выходит на финишную прямую, нужно отладить алгоритм управления.
А тем временем или даже раньше того мной лично разрабатывался алгоритм передачи данных непосредственно от пульта управления к квадрокоптеру. Решение было нестандартное и, возможно, не очень удачное: я решил использовать wi-fi канал для управления квадрокоптером и обычный ноутбук в качестве пульта управления. Передача данных будет осуществляться с помощью стандартных сокетов linux.
Решение было нестандартное и, возможно, не очень удачное: я решил использовать wi-fi канал для управления квадрокоптером и обычный ноутбук в качестве пульта управления. Передача данных будет осуществляться с помощью стандартных сокетов linux.
О дальнейшем развитии проекта напишу как только появится чем похвастаться, вроде видео или фото.
Drone Motor Fundamentals – Как работает бесщеточный двигатель
Это руководство поможет вам понять динамику бесколлекторного двигателя дрона, используемого на квадрокоптерах, и то, как он влияет на летные характеристики. Мы углубимся в типы двигателей, варианты конструкции, вес, общую мощность и другие факторы, влияющие на производительность квадроцикла. Итак, давайте начнем.
Подробнее…
Быстрая навигация
Различия между щеточными и бесщеточными двигателями
Основы бесщеточного двигателя
Отношение тяги к весовому соотношению
Квадратные моторные размеры — более высокие и более широкие статоры
Диаграмма бесщеточного размера мотора
Коэффициенты производительности
кВ — постоянная скорость
Крутящий момент
Эффективность
ТОРКИ
ТЕММЕРТА
ДРУГОЕ ФУКТИРОВАНИЕ. рассмотреть
рассмотреть
Номера N и P
Одножильные и многожильные провода
Магниты
Обмотки двигателя
Вес двигателя
Схемы монтажа двигателя
Особенности для поиска в двигателях
Моторный вал
Air Gap
Моторные провода
Зажимы для фиксации
CW CCW Двигатели
Обнаженные или закрытые двигатели
Заключение
Для начинающих есть 2 типа мотор. используются в дронах: коллекторные и бесколлекторные двигатели. Они различаются по способу работы. Бесщеточные двигатели намного мощнее для своего веса, чем щеточные двигатели, и они служат намного дольше. Для больших квадроциклов: бесспорно, бесколлекторный — это главное.
Но для микро- и нано-дронов просто фантастика иметь эти дешевые моторы, которые уверенно разбиваются.
Внутренняя работа щеточного и бесщеточного двигателей одинакова; оба основаны на электромагнетизме.
Когда на обмотки двигателя подается напряжение (оба двигателя имеют катушки), создается временное магнитное поле, которое отталкивает (и/или притягивает) постоянные магниты, находящиеся внутри двигателя.
Эта магнитная сила создает силу отталкивания в катушке, которая используется для вращения/вращения вала.
Разница между щеточными и бесщеточными двигателями
КПД бесщеточных двигателей обычно составляет 85–90 %, а щеточных двигателей постоянного тока — 75–80 %. Обмотки присутствуют на роторе щеточного двигателя по сравнению со статором бесщеточного двигателя
Эта разница в эффективности означает, что большая часть общей мощности, используемой двигателем, превращается во вращательную силу, и меньше энергии теряется при нагревать.
Бесщеточный двигатель служит дольше, потому что щетки не изнашиваются, а щеточный двигатель быстро изнашивается. Это одна из причин, по которой щеточные двигатели оказались дешевле бесщеточных.
Это руководство в основном ориентировано на бесщеточные двигатели, используемые в конфигурациях дронов для гонок/фристайла.
Бесстраночные двигатели для Quadcopter
Iflight XING2 2306
Лучшее значение для денег
Лучшее соотношение цены и качества
IFLIGHT XING2 23306 9092
1102 9092. от АйФлайт. Xing2 бывают разных форм, но именно двигатели размера 2306 предлагают наилучшую отдачу от вложенных средств.
от АйФлайт. Xing2 бывают разных форм, но именно двигатели размера 2306 предлагают наилучшую отдачу от вложенных средств.
$ Проверить цену на Amazon
Xing2 2306 выпускается в двух модификациях — 1755KV для 6S и 2555KV для 4S — оснащен большими высококачественными подшипниками NSK, увеличивающими срок службы этих двигателей. При цене около 20 долларов технические характеристики этих двигателей производят на нас сильное впечатление. Эти двигатели обмотаны проводами калибра 20AWG и оснащены изогнутыми дуговыми магнитами N52H, которые уменьшают и без того тонкий зазор между статором и ротором и повышают эффективность. Валы из титанового сплава, раструб из алюминия 7075 и NSK 9Подшипники x9x4 гарантируют, что этот двигатель оснащен решеткой. Xing2 оснащены уплотнительными кольцами на подшипниках между раструбом двигателя и статором, сохраняя зазор в подшипнике плотным, чтобы уменьшить вибрации, вызванные высокими оборотами. Все эти функции достигаются при номинальном весе 31,6 г.
Emax Eco II 2207
Best Budget Pick
Best Budget Pick
Emax Eco II 2207
Emax is one of the oldest drone components manufacturer, and are well known for offering продукты с отличным соотношением цены и качества по бюджету.
$ Проверить цену на Amazon. Эти двигатели оснащены стальными валами, прецизионными подшипниками для устранения вибрации роторов и многожильными обмотками для лучшей электропроводности. ECO II поставляются с тремя различными рейтингами KV, чтобы пилоты могли запускать Lipo от 3 до 6S, что дает пилотам возможность поэкспериментировать с размерами пропеллеров. Крепления двигателя 16×16 гарантируют, что пилотам не придется беспокоиться о том, чтобы двигатели подходили к раме. Конструкция с открытым дном помогает уменьшить общий вес двигателя, но грязь и мусор могут попасть в корпус двигателя во время аварии. Эти двигатели не обеспечивают наилучшей производительности, а лучше всего служат в качестве венчика. Недорогая модель ECO II за 13 долларов делает ее идеальным выбором для любителей, пытающихся окунуться в мир FPV.
Эти двигатели не обеспечивают наилучшей производительности, а лучше всего служат в качестве венчика. Недорогая модель ECO II за 13 долларов делает ее идеальным выбором для любителей, пытающихся окунуться в мир FPV.
T-Motor F60 Pro v
Лучший бюджет
Лучший бюджет
T-Motor F60 Pro v
Emax One Of The Ost Of The Ost Of The Ost Of The Ost Of The Ost Of The Ost Of The Ost Of The Ost Of The The The The Ost Of The The Ost Of The The Ost Of The The The The Ost Of The The Ost Of The The The Ost Of The The The The Ost Of The The The The The The Ost Of The Stude Schoneyr Drone Drone Drone Drone. хорошо известен тем, что предлагает отличные продукты по бюджету.
$ Проверить цену на Amazon
Pro Vs сильны. Эти двигатели имеют 4 различных номинала KV — 1750KV, 1950KV, 2020KV и 2550KV, и могут выдерживать пиковую мощность более 1000W. Pro V — самые мощные двигатели в этом списке, при правильном напряжении и пропеллере эти двигатели могут развивать тягу до 1800 г. Вся эта тяга достигается за счет неэффективности. T-Motor утверждает, что новая «конструкция крышки со смещенными сухожилиями» в верхней части двигателя оптимизирована для обеспечения прочности и долговечности. Эти моторы в первую очередь предназначены для гонок, а такие особенности, как увеличенная площадь контакта с основанием, делают дрон более стабильным, импортные шарикоподшипники EZO обеспечивают плавное вращение моторов дольше, а алюминиевый корпус и титановый вал обеспечивают низкий общий вес дрона. мотор под 34g.
Pro V — самые мощные двигатели в этом списке, при правильном напряжении и пропеллере эти двигатели могут развивать тягу до 1800 г. Вся эта тяга достигается за счет неэффективности. T-Motor утверждает, что новая «конструкция крышки со смещенными сухожилиями» в верхней части двигателя оптимизирована для обеспечения прочности и долговечности. Эти моторы в первую очередь предназначены для гонок, а такие особенности, как увеличенная площадь контакта с основанием, делают дрон более стабильным, импортные шарикоподшипники EZO обеспечивают плавное вращение моторов дольше, а алюминиевый корпус и титановый вал обеспечивают низкий общий вес дрона. мотор под 34g.
Five33 2207
Lightweight Builds
Lightweight Builds
Five33 2207
‘Evan Turner’, one of the fastest FPV drone pilots, decided to design a motor, the resulting offspring этого безумного гения — сверхлегкий, безумно мощный мотор, который посрамляет любой другой мотор в этом списке.
$ Проверить цену на Flyfive
Не такой легкий вес 28,4 г, в сочетании с правильным винтом может производить более 900 Вт мощности. Five33 — компания, основанная двукратным чемпионом MultiGP Эваном Тернером. Это единственный двигатель в линейке Five33, и он имеет один рейтинг KV — 1960KV. Эван говорит, что, когда он проектировал двигатель, он хотел, чтобы он работал в паре с винтом с низким шагом. Он считает, что двигатель с высоким значением KV в сочетании с легким винтом даст наибольшую отзывчивость. С практической точки зрения на уловку, использованную Эваном, винт с более легким шагом является энергоэффективным и создает немного меньшую тягу. Но вместо этого Эван говорит, что квадроцикл, способный достичь Луны и оставаться на плаву в течение 1 минуты 30 секунд, — плохой вариант; по сравнению со слегка расстроенным квадроциклом, который управляем и держится на плаву 2+мин. Он утверждает, что этот двигатель был разработан с некоторыми замечательными характеристиками, разработанными специально для легкого гоночного квадроцикла на 5S или 6S. Это может быть легкий двигатель, но его долговечность всегда ставится под сомнение.
Это может быть легкий двигатель, но его долговечность всегда ставится под сомнение.
iFlight Xing2 2306 | Emax Eco II 2207 | T-Motor F60 Pro V | |
|---|---|---|---|
KV Options | 1700KV, 1900KV, 2400KV | 1700KV, 1800KV, 1900KV, 2450KV, 2750KV | 1750KV, 1950KV, 2550KV |
Lipo Voltage | 3-6S | 2-6S | 4-6S |
Watts | 1700KV- 960W | 1700KV- 778W | 1750KV- 940W |
Weight (g) | 31. | 34.6g | 32.5g |
 6g
6gALSO READ:
Brushless Motor Kv Rating Explained
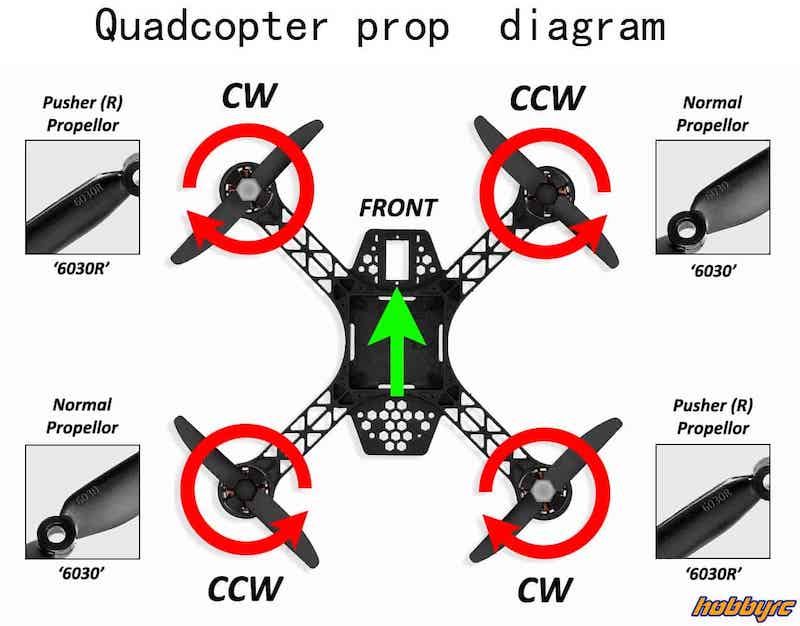
Quadcopter Motor and Propeller Rotation
The Basics of brushless motor
Бесщеточный двигатель состоит из двух основных частей, называемых статором и ротором. Изображение показано ниже для справки.
Статор – неподвижная часть двигателя (обмотки), а ротор – вращающаяся часть двигателя (колокол с магнитами). Также есть много других мелких вещей, таких как подшипники, катушки, магниты, валы и т. д.
Размер двигателя основан на размере статора (диаметр и высота). Например, если размер двигателя равен 2207, это означает, что статор имеет ширину 22 мм и высоту статора 07 мм.
Также есть нечто, называемое KV мотора. Это означает, что теоретически скорость, с которой вращается двигатель, зависит от каждого вольта, приложенного к двигателю.
Соотношение тяги к массе
Бесщеточные двигатели бывают всех форм и размеров. Общее эмпирическое правило заключается в том, чтобы стремиться к соотношению тяги к весу 2:1. Вы не сможете участвовать в жестких гонках с ним. Очевидно, что чем выше, тем лучше. Отношение тяги к весу зависит в основном от размера самих квадроциклов.
Существуют готовые квадроциклы, такие как Diatone Crusader GT, у которых отношение тяги к массе составляет 8:1. Есть люди, которые добились 13:1. Но есть определенные ограничения для двигателей, потому что они могут вращаться только с такой скоростью, а вращение их еще быстрее делает их неэффективными.
Даже для установки для фотосъемки вы должны ориентироваться как минимум на 3 или 4:1 на случай, если вы решите модернизировать свою установку в будущем или добавить HD-камеру или большую батарею для более длительного времени полета или что-то в этом роде, тогда у вас будет некоторая резервная мощность, оставшаяся для компенсации.
Для новичка в гонках на дронах оптимальной будет тяга 4 или 5:1. Если у вас ограниченный бюджет, соберите чудовищный квадроцикл и ограничьте пределом газа на Betaflight или передатчике.
Счетверенные размеры двигателей — более высокие и широкие статоры
Двигатель обозначается набором из 4 цифр, таких как 2207 или 2306, или любым другим. Обозначает диаметр и высоту ротора в миллиметрах (мм). Чем больше двигатель, тем выше тяга, которую он создает.
- Более высокий статор = более высокая максимальная скорость и ужасная управляемость на низких скоростях
- Более широкий статор = более низкая максимальная скорость и лучшая управляемость на более низких скоростях
Основной причиной является усиление магнитного поля статоров. Более высокие статоры имеют большие магниты по сравнению с меньшими и более широкими статорами.
Двигатели 2207 и 2306
Хорошим сравнением будет типичное сравнение двигателей 2207 и 2306. Это широко обсуждаемая тема относительно того, что лучше, и одно нельзя рекомендовать другому, поскольку оба имеют свои преимущества и недостатки, которые будут рассмотрены в другой статье.
Это широко обсуждаемая тема относительно того, что лучше, и одно нельзя рекомендовать другому, поскольку оба имеют свои преимущества и недостатки, которые будут рассмотрены в другой статье.
Таблица размеров бесщеточного двигателя
Выбор двигателя зависит от того, насколько большой вы хотите построить свой квадроцикл. Отсюда и название Размер рамы = Размер двигателя.
Определив размер рамы, мы можем определить, насколько большой двигатель мы должны использовать.
Размер рамы также ограничивает размер пропеллера, и каждый пропеллер требует отдельного двигателя для его вращения и эффективного создания тяги.
Также KV двигателя играет важную роль при выборе двигателя. Как упоминалось ранее, чем выше KV, тем больше ток.
The table below shows the nominal frames and quadcopter motor numbers:
Frame Size | Prop Size | Motor Size | KV | |
|---|---|---|---|---|
150mm and smaller | 3 «и меньше | 1105-1306 | 3000 и более высокий | |
180MM | ||||
180MM 9000 | ||||
180MM 9000 2121219207 | ||||
. 0413 4″ 0413 4″ | 1806 | 2600-3000 | ||
210mm | 5″ | 2204-2208/2306 | 2600-3000 | |
250mm | 6″ | 2205-2208/2306 | 2000-2300 | |
300mm | 7″ | 2208/2212 | 1600 |
Коэффициенты производительности
кВ — константа скорости
Теоретически RC -stless Motor -Rating представляют, что на Motortates для наготоки, на что нахождение на Matortates на Motortates на Motortates. Например, если двигатель 2300 кВ с аккумуляторным двигателем 3S для квадрокоптера, подключенным к его концам, то двигатель будет вращаться со скоростью 2600×12,60 = 32 760 об / мин (обороты в минуту — количество оборотов в минуту) без пропеллеров. Скорость вращения постепенно снижается из-за сопротивления воздуха.
Например, если двигатель 2300 кВ с аккумуляторным двигателем 3S для квадрокоптера, подключенным к его концам, то двигатель будет вращаться со скоростью 2600×12,60 = 32 760 об / мин (обороты в минуту — количество оборотов в минуту) без пропеллеров. Скорость вращения постепенно снижается из-за сопротивления воздуха.
Motor KV представляет собой скорость, с которой вращается двигатель на каждый вольт, приложенный к двигателю.
Более высокое значение KV означает более низкое сопротивление, более высокое потребление тока и более низкий КПД. Меньшее значение KV означает более высокое сопротивление и меньшее потребление тока, а также значительно лучшую эффективность.
Если вы начинаете, желательно около 2300-2400 кВ.
Например, если двигатель рассчитан на 2300 кВ с напряжением батареи 3 с, то двигатель будет вращаться при 2300×12,60 = 28,980 об/мин без пропеллеров, и это максимальные обороты, которых он может достичь без нагрузки.
Скорость вращения резко снижается при установке гребного винта из-за сопротивления воздуха, оказываемого двигателю при вращении гребного винта.
Related Posts
Крутящий момент
Переходим к следующему фактору, который приходит на ум, это крутящий момент, создаваемый двигателем. Крутящий момент — это сила вращения или сила вращения, которая вращает пропеллер. Это не имеет большого значения, если вы начинаете.
Крутящий момент двигателя зависит от таких факторов, как:
1. Размер статора – чем больше статор, тем выше крутящий момент
2. Материалы, такие как качество магнитов и медных обмоток в роторе
3. Факторы конструкции двигателя, такие как воздух зазоры между статором и ротором.
Крутящий момент двигателя значительно влияет на производительность квадроцикла. Это также определяет, как коптер будет реагировать на входные данные. Чем выше крутящий момент, создаваемый двигателем, тем более отзывчивым будет квадроцикл.
Крутящий момент также определяет, насколько быстро квадроцикл меняет направление в полете, что очень помогает делать более крутые повороты в гонке. Относительно, если двигатель производит меньший крутящий момент и оснащен более тяжелыми винтами, двигатель не может вращать винт, что приводит к снижению эффективности и тяги. Потребляемый ток в двигателе с чрезмерной опорой будет значительно выше.
Относительно, если двигатель производит меньший крутящий момент и оснащен более тяжелыми винтами, двигатель не может вращать винт, что приводит к снижению эффективности и тяги. Потребляемый ток в двигателе с чрезмерной опорой будет значительно выше.
Одним из основных недостатков двигателей с высоким крутящим моментом является то, что, несмотря на то, что они кажутся более быстрыми и чувствительными к элементам управления, у них плохие колебания. Поскольку двигатели с высоким крутящим моментом способны быстрее изменять обороты, они фактически усиливают ошибку (колебания).
В Betaflight трудно избавиться от осцилляции даже с настройкой PID, особенно по оси рыскания коптера.
Эффективность
Эффективность двигателя рассчитывается путем деления тяги, создаваемой двигателем при 100% дроссельной заслонке, на мощность, производимую двигателем.
Измеряется в граммах на ватт (г/Вт). Чем выше это отношение, тем эффективнее двигатель. Мы не собираемся все время летать на 100% дроссельной заслонке; поэтому важно учитывать КПД двигателя во всем диапазоне дроссельной заслонки от 0% до 100% дроссельной заслонки.
Некоторые двигатели могут быть эффективнее в нижней части кривой дроссельной заслонки, а некоторые двигатели могут быть более эффективными в верхней части кривой дроссельной заслонки. Поэтому важно выбрать правильный мотор в зависимости от стиля вашего полета.
Потребляемый ток
Ток, потребляемый двигателем, важен, потому что он помогает нам определить размер регулятора квадрокоптера, необходимый для этого конкретного двигателя.
Например, двигатель 1104 потребляет не более 10 А при 100 % дроссельной заслонки, тогда как некоторые двигатели 2306 потребляют не более 40 А при 100 % дроссельной заслонке. esc должен быть выбран соответственно для номинального значения, на 20 % превышающего ток, потребляемый двигателем при 100 %.
То есть; если двигатель потребляет максимум 30 А при 100% дроссельной заслонке, идеальным вариантом будет регулятор, рассчитанный на постоянный ток 36 А.
Также известен как взрывной рейтинг esc. Это максимальный ток, который esc может выдержать в течение короткого периода времени, не повреждая себя.
Температура
Температура или нагрев в целом губительны для двигателей с течением времени. Если двигатели подвергаются длительному нагреву, магниты в роторе со временем теряют свою напряженность магнитного поля. Они со временем размагничиваются под воздействием постоянного тепла, что приводит к сокращению срока службы двигателя.
Основными причинами нагрева двигателя являются чрезмерная пропорка и использование более высоких дросселей в течение длительного периода времени. Если вы профессиональный гонщик на дронах, вы будете работать с более высокими дросселями, но если вы только начинаете, и двигатель нагревается, значит, двигатель перегружен.
Но производители двигателей компенсируют эту проблему, разрабатывая охлаждающие ребра, которые помогают двигателю всасывать воздух в двигатель и охлаждать себя, что соответствует увеличению срока службы, при условии, что вы не разобьетесь и не разрушите двигатель заранее.
Другие факторы, которые следует учитывать
Номера N и P
Типичный двигатель 22xx или 23xx будет иметь 12 полюсов и 14 магнитов. Этот номер будет обозначаться примерно как 12П14Н. Как показано на схеме, полюса присутствуют на статоре, а постоянные магниты находятся на роторе двигателя.
Этот номер будет обозначаться примерно как 12П14Н. Как показано на схеме, полюса присутствуют на статоре, а постоянные магниты находятся на роторе двигателя.
Одножильный и многожильный провод
Одножильный провод, как следует из названия, состоит из одного медного провода, тогда как многожильный провод состоит из 3 меньших проводов для замены одного более толстого провода. Одножильные провода толще и намного лучше справляются с выделением тепла при использовании в высоковольтных конструкциях.
Многожильные провода легко рвутся или плавятся при более высоких рабочих температурах. Как правило, многожильные провода более эффективны, потому что они упаковывают провода намного плотнее и ближе друг к другу, что создает более сильные магнитные поля и приводит к более мощным двигателям.
Магниты
Магниты в двигателе играют важную роль в определении того, насколько мощным будет двигатель.
У дешевых двигателей более слабые магниты и меньшая тяга по сравнению с дорогими двигателями с более мощными магнитами.
Некоторые двигатели более высокого класса даже имеют изогнутые магниты, повторяющие форму ротора.
Магниты, используемые в бесщеточных двигателях, классифицируются по магнитной силе, такой как N52, N54 и т. д., чем выше, тем сильнее магнитное поле, создаваемое магнитами.
Обмотки двигателя
Другим фактором, который следует учитывать, является качество обмоток двигателя. Если двигатель имеет высококачественные медные обмотки, они будут оказывать меньшее сопротивление потоку тока и, таким образом, обеспечивать более высокую эффективность и более длительное время полета.
Вес двигателя
Вес двигателя зависит от размера и материалов двигателя. Чем больше мотор, тем он тяжелее. Имея в виду, что двигатели, используемые на 5-дюймовом квадроцикле, обычно весят около 30-40 граммов с проводами. Есть несколько очень легких двигателей, таких как Emax RSII, которые весят около 25 граммов для двигателя 2306 с парой граммов для проводов.
Есть несколько очень тяжелых двигателей, например, двигатели Cobra 2204, которые весят около 34 граммов. Как говорится, каждый грамм на счету, особенно с моторами. Почему? Поскольку плечо момента увеличивается, чем тяжелее становится двигатель. Проще говоря, для поворота квадрицепса требуется значительное усилие с увеличением на каждый грамм.
Но это не значит, что легче — лучше. Более легкие двигатели не так долговечны, как более тяжелые, потому что они должны быть сделаны из более легких материалов для уменьшения веса. Следовательно, все сводится к тому, для чего вы собираетесь использовать двигатель.
Схемы крепления мотора
Схемы крепления мотора также имеют значение, потому что они должны быть совместимы со всеми рамами, в которые вы хотите установить мотор. Большинство 5-дюймовых квадроциклов в наши дни используют моторы размеров от 2205 до 2407.
Все моторы имеют либо (16х16) мм, либо (16х19) мм.) монтажные схемы мм. Все современные рамы поддерживают все эти схемы крепления, и это не должно вызывать особых опасений.
На изображении выше показан бесколлекторный двигатель в квадроцикле. Отверстия для винтов будут присутствовать на статоре двигателя. Показанный выше двигатель или статор имеет монтажную схему 16×19 мм и использует 4 винта м3 для крепления двигателя к раме.
ЧИТАЙТЕ ТАКЖЕ:
Как перемотать бесколлекторный двигатель
Особенности двигателей
Вал двигателя
В настоящее время в современных двигателях используются полые валы, а не сплошные валы, чтобы уменьшить вес двигателя. В этом есть свои положительные и отрицательные стороны.
Полые валы, очевидно, уменьшают вес двигателя, но они менее долговечны при авариях.
Нельзя заменить валы без замены всего ротора двигателя. Для строителей с ограниченным бюджетом полые валы — это плохо, но для тех, кто хочет сэкономить каждый грамм, полые валы — это то, что нужно.
Воздушный зазор
Другим важным фактором повышения производительности двигателя является воздушный зазор между статором и ротором. Чем ближе ротор к статору (магниты к обмоткам), тем эффективнее он преобразует ток. Чем меньше воздушный зазор, тем выше тяга, создаваемая двигателем, поскольку статор лучше пересекает магнитные поля.
Чем ближе ротор к статору (магниты к обмоткам), тем эффективнее он преобразует ток. Чем меньше воздушный зазор, тем выше тяга, создаваемая двигателем, поскольку статор лучше пересекает магнитные поля.
Провода двигателя
Следующим фактором, влияющим на работу двигателя, является сечение провода двигателя. Двигатели используют либо 20 Awg, либо 18 Awg (американский калибр проволоки). В серии Emax RS утверждается, что переход с провода калибра 22 на провод калибра 20 увеличил выходную мощность на 5%. Но в этом нет ничего страшного при покупке мотора и начале работы в хобби.
Стопорные зажимы
Следующее, о чем мы поговорим, это фиксирующие зажимы или способы крепления статора и ротора. Есть в основном 3 типа, которые мы используем в нашем хобби.
- E-зажим
- C-зажим
- Винтовые фиксаторы
Каждый из них имеет свои преимущества и недостатки.
Например: Зажимы E трудно снять, не сломав сам зажим. Винтовые фиксаторы легко снимаются и, следовательно, обеспечивают легкий доступ к статору и ротору.
Винтовые фиксаторы легко снимаются и, следовательно, обеспечивают легкий доступ к статору и ротору.
Но винтовые фиксаторы со временем отвинчиваются и ослабевают из-за постоянной вибрации двигателя, а также могут привести к чрезмерному затягиванию вала и затруднению вращения двигателя. Нельзя рекомендовать один клип вместо другого. Все зависит от того, для чего двигатель будет использоваться и его области применения.
Двигатели по часовой стрелке против часовой стрелки
Существует 2 типа двигателей — двигатели вращения по часовой стрелке (CW) и против часовой стрелки (CCW). Они различаются только направлением вращения, а остальные конструктивные параметры двигателя одинаковы. На приведенной ниже диаграмме показано расположение двигателей для четырехугольного, шестигранного и восьмицилиндрового дрона. Можно сделать вывод, что моторы противоположной стороны вращаются в одном направлении. То же самое и в гексагональных и окта-дронах.
Двигатели с голым дном ИЛИ Двигатели с закрытым дном
Последней тенденцией в квадроциклах являются двигатели с голым дном. Они значительно экономят вес (в целом 2 г), может показаться, что это немного, но это много с точки зрения гонок на дронах. Это может быть разница между победой в гонке или поражением.
Они значительно экономят вес (в целом 2 г), может показаться, что это немного, но это много с точки зрения гонок на дронах. Это может быть разница между победой в гонке или поражением.
Это плюсы моторов с голым дном, есть и минусы у моторов такого типа.
Во-первых, во время аварии мелкие камни и мусор могут попасть внутрь колокола и повредить магниты и катушки. Даже профессиональные гонщики часто разбиваются, поэтому новичкам лучше купить моторы с закрытым днищем, когда они начинают заниматься хобби, потому что они больше подвержены авариям. На нижеприведенных фотографиях изображены моторы с голым и закрытым днищем.
Заключение
В этой статье мы попытались охватить большинство основных аспектов бесколлекторного двигателя для квадроцикла. В будущем он будет изменен с некоторыми изменениями по мере необходимости. Есть так много вариантов на выбор, и мы подумали, что это должно быть рассмотрено в другой статье. Мы надеемся, что эта статья хоть как-то помогла вам получить базовые знания о FPV. Спасибо за прочтение, если вы дочитали до конца.
Спасибо за прочтение, если вы дочитали до конца.
Похожие сообщения
Бесколлекторные двигатели для мультикоптеров, самолетов, дронов
Служба USPS и сроки доставки в последнее время были ненадежными. Мы рекомендуем выбрать FedEx во время оформления заказа.
- Дом
- Моторы и моторные части
- Двигатели — бесщеточные
- 101 шт.
Нужны лучшие бесколлекторные двигатели для мультикоптера, самолета или дрона? Мы вас прикрыли. Большой выбор от лучших брендов, включая T-Motor, EMAX, Cobra, STRIX и других! Многие гоночные двигатели оснащены магнитами N52 и высококачественными подшипниками для лучшей производительности.
Сортировать по:
От новых к старымСамым старым к новымЦена (от низшей к наибольшей)Цена (от наибольшей к наименьшей)Название (A-Z)Название (Z-A)Недавно в наличииFeatured
Только в наличии Показать снятые с производства товары
Бесщеточный двигатель SunnySky X2212 1250KV II
SunnySky
16,99 $
В наличии
SunnySky X Series V3 X2820 Бесколлекторный двигатель 1000KV
Солнечное небо
44,95 $
В наличии
Бесколлекторный двигатель SunnySky X2212 KV980 — Мультиротор CW
SunnySky
15,99 $
В наличии
Бесколлекторный двигатель SunnySky X2212 KV980 — мультикоптер против часовой стрелки
SunnySky
15,99 $
В наличии
Бесщеточный двигатель SunnySky X Series V3 X3530 V3 520 кВ
SunnySky
64,95 $
Остался только 1
EMAX ECO Micro Series 1407 — Бесколлекторный двигатель 3300 кВ
EMAX
12,99 $
В наличии
Бесколлекторные двигатели SunnySky X2216 с коротким валом, версия 1250KV
SunnySky
18,99 $
В наличии
STRIX Goblin — Замена двигателя PNP — Cobra 2217 2300KV
СТРИКС
30,99 $
В наличии
Бесколлекторный двигатель Sunnysky R1104 Micro Drone FPV 5500kv
SunnySky
12,99 $
В наличии
SunnySky X Series V3 X2820 Бесколлекторный двигатель 500KV Короткий
SunnySky
44,95 $
В наличии
Бесщеточный двигатель SunnySky X Series V3 X3120 585KV
SunnySky
47,99 $
В наличии
Бесколлекторный двигатель EMAX GTII-2212T — 1800 кВт
EMAX
19,99 $
В наличии
Бесколлекторный двигатель EMAX GTII-2212T — 2200 кВт
EMAX
19,99 $
В наличии
Бесколлекторный двигатель EMAX GTII-2212T — 2450 кВт
ЭМАКС
19,99 $
В наличии
Бесщеточный двигатель EMAX ECO Micro Series 1106 4500kv
EMAX
12,99 $
В наличии
Детали EMAX Tinyhawk II — бесщеточный двигатель 0802 16000KV
EMAX
10,99 $
В наличии
Запасные части EMAX Tinyhawk III — двигатель 15000kv
EMAX
10,99 $
В наличии
EMAX ECO Micro Series 1404 — Бесколлекторный двигатель 4800 кВ
EMAX
12,99 $
В наличии
EMAX ECO II 2807 Бесколлекторный двигатель 1300KV
EMAX
19,49 $
В наличии
EMAX ECO II 2004 Бесколлекторный двигатель 3000KV
ЭМАКС
13,40 $
В наличии
EMAX ECO II 2004 Бесколлекторный двигатель 2000KV
EMAX
12,99 $
В наличии
EMAX ECO II 2004 Бесколлекторный двигатель 2400KV
EMAX
12,99 $
В наличии
EMAX ECO II 2004 Бесколлекторный двигатель 1600KV
EMAX
13,40 $
В наличии
SunnySky X Series V3 X2814 Бесколлекторный двигатель 1000KV
SunnySky
39,99 $
В наличии
SunnySky X Series V3 X2814 Бесколлекторный двигатель 900KV
SunnySky
39,99 $
В наличии
SunnySky X Series V3 X2814 Бесколлекторный двигатель 1200KV
Солнечное небо
39,99 $
В наличии
SunnySky X Series V3 X2220 V3 Бесколлекторный двигатель 2200KV
SunnySky
29,99 $
В наличии
Бесщеточный двигатель SunnySky X Series V3 X2220 V3 980KV
SunnySky
29,99 $
В наличии
SunnySky X Series V3 X2305 Бесколлекторный двигатель 1450KV
SunnySky
17,99 $
В наличии
SunnySky X Series V3 X2305 Бесколлекторный двигатель 1620KV
SunnySky
17,99 $
В наличии
EMAX ECO II 2807 Бесколлекторный двигатель 1700KV
EMAX
19,49 $
Осталось всего 3
EMAX ECO II 2807 Бесколлекторный двигатель 1500KV
EMAX
19,49 $
Осталось всего 3
Бесколлекторный двигатель SunnySky X Series V3 X3520 V3 495 кВт
SunnySky
59,99 $
В наличии
SunnySky X Series V3 X3520 V3 Бесколлекторный двигатель 560KV
SunnySky
59,99 $
В наличии
Бесщеточный двигатель SunnySky X Series V3 X3520 V3 780KV
SunnySky
59,99 $
В наличии
Бесщеточный двигатель SunnySky X2212 980KV II
SunnySky
16,99 $
В наличии
© 2023 Ready Made RC, LLC
109 Innovation Ct Ste C, Делавэр, Огайо 43015, США | +1(740)-936-4500
Архивы моторов для дронов — универсальный магазин запчастей для дронов.
 Сохранить BIG
Сохранить BIG
Перейти к навигацииПерейти к содержимому
Показано 1–30 из 49 результатов
Сортировка по умолчаниюСортировать по популярностиСортировать по среднему рейтингуСортировать по последнимСортировать по цене: от низкой к высокойСортировать по цене: от высокой к низкойПоказать 16Показать 32Показать все
Аксессуары, Сельскохозяйственный дрон, Двигатель дрона, Запчасти для промышленных дронов и БПЛА, Система питания и пропеллер, Система питания и пропеллер
40-дюймовый пропеллер Пропеллер из углеродного волокна с высоким крутящим моментом для тяжелого дрона T4013 для квадрокоптера Мотор для мультикоптера
0 из 5
(0)
Артикул: 5487FB8/10-130
Аксессуары, Двигатель дрона, Запчасти для промышленных дронов и БПЛА, Система питания и пропеллер, Система питания и пропеллер
дешевые дроны с бесщеточными двигателями MN505-S KV320 KV380
0 из 5
(0)
• Высокая мощность, длительный срок службы
• Отличные характеристики охлаждения
• Защита от высоких температур/перегрузок
• Пыленепроницаемость/водонепроницаемость/антикоррозияАртикул: 5487FB8/10-68
Аксессуары, Двигатель дрона, Запчасти для промышленных дронов и БПЛА, Система питания и пропеллер, Система питания и пропеллер
Самый дешевый квадрокоптер с бесколлекторными двигателями MN705-S KV125 KV260
0 из 5
(0)
• Высокая мощность, длительный срок службы
• Отличные характеристики охлаждения
• Защита от высоких температур/перегрузок
• Пыленепроницаемость/водонепроницаемость/антикоррозияАртикул: 5487FB8/10-72
Аксессуары, Сельскохозяйственный дрон, Двигатель дрона, Двигатель тяжелого подъема/ESC/Пропеллер, Запчасти для промышленных дронов и БПЛА, Двигатели, Система питания и пропеллер, Система питания и пропеллер
двигатель для коммерческого дрона h302150 изготовленный на заказ сверхмощный 180 кг многороторный двигатель высоковольтная версия беспилотного летательного аппарата
0 из 5
(0)
Артикул: 5487FB8/10-131
Аксессуары, Сельскохозяйственный дрон, Двигатель дрона, Гибридная генераторная система для дрона, Запчасти для промышленных дронов и БПЛА, Система питания и пропеллер, Система питания и пропеллер
Гибридный генератор для дрона FL6000 Система питания для аэрофотосъемки, посадки и картографирования БПЛА с длительным временем полета
Рейтинг 5,00 из 5
(1)
Артикул: 5487FB8/10-126
Аксессуары, мотор для дрона, запчасти для промышленных дронов и БПЛА, система питания и винт
• Высокий КПД и тяга среди сопоставимых двигателей
• Стабильность и надежность с длительным сроком службы
• Водонепроницаемый, пыленепроницаемый, антикоррозийный и термостойкий двигатель
• Прецизионная конструкция с прочной конструкцией
• Простота монтажа и замечательная совместимостьАртикул: 5487FB8/10-66
Аксессуары, моторы для дронов, моторы и винты, вертикальный взлет и неподвижное крыло
электрический дрон AT2303 Short Shaft KV1500 KV1800 KV2300
0 из 5
(0)
• Легкие и прочные модели AT2303/2304/2306 весом 150–320 г
• Короткая и длинная штанга для свободной опции
• Протестировано Филиппо и другим пилотом-чемпионом
• Специально разработано для акробатических самолетов F3P, 3D, 4D
• Имеют гибкость и устойчивость летный опыт.Артикул: 5487FB8/10-78
Аксессуары, Двигатель для дрона, Запчасти для промышленных дронов и БПЛА, Двигатели и пропеллеры, Система питания и пропеллер, VTOL & FIXED WING
самые быстрые моторы для дронов AT2306 Короткий вал KV1500 KV1900 KV2300
0 из 5
(0)
• Легкие и прочные модели AT2303/2304/2306 весом 150–320 г
• Короткая и длинная штанга для свободной опции
• Протестировано Филиппо и другим пилотом-чемпионом
• Специально разработано для акробатических самолетов F3P, 3D, 4D
• Имеют гибкость и устойчивость летный опыт.Артикул: 5487FB8/10-80
Аксессуары, Сельскохозяйственный дрон, Двигатель дрона, Запчасти для промышленных дронов и БПЛА, Двигатели и пропеллеры, Энергетическая система и пропеллер, Энергетическая система и пропеллер, VTOL & FIXED WING
Складной пропеллер 2280/2380/2680/2880/3080 CW CCW 28 дюймов и 30-дюймовый пропеллер для двигателей Q9XL и DJI M10 E500
0 из 5
(0)
Артикул: 5487FB8/10-89
Аксессуары, Сельскохозяйственный дрон, Двигатель дрона, ТЯЖЕЛАЯ ПОЛЕЗНАЯ НАГРУЗКА, Запчасти для промышленных дронов и БПЛА, Система питания и пропеллер, Система питания и пропеллер
Двигатели для тяжелых дронов Промышленный бесщеточный двигатель с упорным диском 50 кг Адаптер высокого натяжения h240 KV80 40-дюймовый пропеллер из углеродного волокна
0 из 5
(0)
Артикул: 5487FB8/10-129
Аксессуары, Сельскохозяйственный дрон, Двигатель дрона, Гибридная генераторная система для дрона, Запчасти для промышленных дронов и БПЛА, Система питания и пропеллер, Система питания и пропеллер
Гибридный генератор FL7000 Система питания для аэрофотосъемки, посадки и картографирования БПЛА с длительным полетом
0 из 5
(0)
Артикул: 5487FB8/10-126-1
Аксессуары, Двигатель для дрона, Гибридная генераторная система для дрона, LONG ENDURANCE, Система питания и пропеллер, Система питания и пропеллер, Без категории
Гибридная система питания для дрона Генератор для гибридного дрона
0 из 5
(0)
Артикул: 5487FB8/10-118
Аксессуары, Аксессуары DJI, Запчасти и запасные части, Дроновый двигатель, Пожарные дроны, Наземная станция управления, Тяжелый двигатель / ESC / Пропеллер, Запчасти для промышленных дронов и БПЛА, ДОЛГАЯ ВЫНОСЛИВОСТЬ, Многороторная рама дрона, Платная нагрузка для коммерческого применения, Решение RTK, аксессуары для охранных и полицейских дронов/БПЛА, рама для охранных и полицейских дронов/БПЛА, охранные и полицейские дроны, геодезические и картографические дроны
Квадрокоптер, выносливость 90 минут
0 из 5
(0)
Артикул: 5487FB8/10-163
Аксессуары, Двигатель для дрона, Запчасти для промышленных дронов и БПЛА, Двигатели и пропеллеры, Система питания и пропеллер, СВВП и НЕПОДВИЖНОЕ КРЫЛО
Артикул: 5487FB8/10-81
Аксессуары, Мотор для дрона, Запчасти для промышленных дронов и БПЛА, Двигатели и пропеллеры, Система питания и пропеллер, СВВП и НЕПОДВИЖНОЕ КРЫЛО
• Легкие и прочные модели AT2303/2304/2306 весом 150–320 г
• Короткая и длинная штанга в качестве опции
• Протестировано Филиппо и другими пилотами-чемпионами
• Специально разработано для акробатических самолетов F3P, 3D, 4D
• Иметь гибкий и стабильный опыт полетов.Артикул: 5487FB8/10-79


Показано 1–30 из 49 результатов
Как работают бесколлекторные двигатели и как их тестировать Чтобы получить максимальную производительность, необходимо протестировать несколько двигателей и выбрать наиболее эффективный для вашей конструкции. На рынке представлено множество двигателей, в том числе множество разновидностей электродвигателей, специально созданных для использования в конструкции дронов. В этой статье мы сосредоточимся исключительно на электродвигателях, затронув следующие темы:
- Типы электродвигателей
- Как работают бесщеточные двигатели
- Inrunner против Outrunners
- Эффективность и производительность
- Выбор двигателя
Примечание. Мы будем использовать испытательный стенд серии 1580 для сбора данных о двигателе и гребном винте для этой статьи.
1. Типы электродвигателей
Типы электродвигателей
Существует четыре категории электродвигателей: универсальные, переменного тока, щеточные двигатели постоянного тока и бесщеточные двигатели постоянного тока.
Универсальный двигатель, вероятно, наименее удобен для использования в дроне. Он имеет низкую эффективность, плохую регулировку скорости и лучше всего работает на очень высоких оборотах, что не идеально, поскольку большинству дронов требуется точная регулировка скорости для стабильного полета. Их чаще можно увидеть в промышленных инструментах и бытовой технике, например, в дрелях и пылесосах.
Двигатель переменного тока (AC) использует переменный ток для вращения ротора. По этой причине он обычно используется при подключении к сетевой розетке. Двигателю переменного тока потребуется трансформатор для работы от батарей.
С другой стороны, двигатель постоянного тока (DC) очень похож на двигатель переменного тока, но он подключен так, что использует постоянный ток вместо переменного тока. Двигатель постоянного тока может питать дрон, но не так хорошо, как другой кандидат, двигатель BLDC.
Двигатель постоянного тока может питать дрон, но не так хорошо, как другой кандидат, двигатель BLDC.
BLDC или бесщеточный двигатель постоянного тока, естественно, назван так потому, что в нем не используются щетки, в отличие от щеточных двигателей постоянного тока. Двигатели BLDC не требуют щеток, поскольку медные катушки, несущие заряд, напрямую подключены к статору, в отличие от щеточных двигателей, которые используют щетки для соединения источника питания с ротором. Сами щетки также являются основным недостатком щеточных двигателей, поскольку щетки изнашиваются и требуют обслуживания или замены. Бесколлекторные двигатели обладают всеми характеристиками, необходимыми для отличной конструкции дрона: высокая эффективность, широкий диапазон скоростей и общие возможности с высокой скоростью и крутящим моментом. Они также относительно доступны и требуют сравнительно меньше обслуживания.
Дополнительная литература: Список производителей бесщеточных двигателей
2. Как работает бесщеточный двигатель?
Как работает бесщеточный двигатель?
Прежде чем перейти к принципу бесщеточного механизма, давайте сначала рассмотрим его компоненты.
Компоненты бесщеточного двигателя:
Электромагниты и постоянные магниты:
Токопроводящая проволока, намотанная на металлическое основание, не будет действовать как магнит, но когда по ней протекает ток, она заставляет ее вращаться. вести себя как магнит. Обычно его называют электромагнитом. Если по тому же проводу течет отрицательный ток, магнит теперь оказывает противоположное действие, он будет притягивать другой магнит, а не отталкивать его.
Ротор и статор:
Части, видимые на внутреннем круге рисунка 3, представляют собой электромагниты, а на внешнем круге — постоянные магниты. Чтобы включить двигатель, вы активируете один из электромагнитов, подавая электрический ток на его катушки. Это заставит ротор начать вращаться, поскольку постоянный магнит испытывает отталкивание от аналогичного электромагнита и пытается выровняться с противоположным постоянным магнитом на статоре. Это заставит его вращаться только в течение короткого периода времени, когда электромагнит и противоположный постоянный магнит выровняются. Следующим шагом является подача питания на другой электромагнит, чтобы вращение не остановилось, за которым следует следующий электромагнит, следующий и так далее.
Это заставит его вращаться только в течение короткого периода времени, когда электромагнит и противоположный постоянный магнит выровняются. Следующим шагом является подача питания на другой электромагнит, чтобы вращение не остановилось, за которым следует следующий электромагнит, следующий и так далее.
При подаче трехфазного тока с заданной частотой двигатель будет вращаться со скоростью, равной частоте этого сигнала. Дроссель на контроллере дрона используется для изменения скорости двигателя, при этом более высокий вход дросселя посылает сигнал более высокой частоты на дрон. Электронный регулятор скорости (ESC) управляет подачей сигнала, чтобы регулировать скорость двигателя в соответствии с входным сигналом дроссельной заслонки.
Какова роль ESC?
ESC или электронный регулятор скорости управляет электродвигателем, подавая электрические сигналы, которые преобразуются в изменение скорости или даже изменение направления вращения. Он использует постоянный ток в сочетании с системой переключателей для получения переменного трехфазного тока. Затем этот выходной ток можно изменить, изменив скорость размыкания и замыкания переключателей в цепи. Бесщеточным ESC нужна информация о текущем положении ротора, чтобы иметь возможность запустить двигатель и выбрать направление вращения. Чтобы определить свое положение, ESC использует информацию от последнего обесточенного электромагнита для измерения его индукции. Эта индукция варьируется в зависимости от того, где находится ближайший постоянный магнит, и чем ближе он к электромагниту, тем сильнее индуцируется магнитное поле.
Затем этот выходной ток можно изменить, изменив скорость размыкания и замыкания переключателей в цепи. Бесщеточным ESC нужна информация о текущем положении ротора, чтобы иметь возможность запустить двигатель и выбрать направление вращения. Чтобы определить свое положение, ESC использует информацию от последнего обесточенного электромагнита для измерения его индукции. Эта индукция варьируется в зависимости от того, где находится ближайший постоянный магнит, и чем ближе он к электромагниту, тем сильнее индуцируется магнитное поле.
Дроссель используется для изменения скорости двигателя. Для этого ESC должен регулировать частоту переключения на основе сигнала дроссельной заслонки. Существует несколько протоколов доставки сигналов с разной производительностью, наиболее распространенными из которых являются Oneshot, Multishot и Dshot. Разница между ними заключается в частоте подаваемых сигналов. Более короткие частоты обеспечивают более быстрое время реакции. Кроме того, протокол Dshot отличается от двух других тем, что он отправляет цифровой сигнал вместо аналогового. Это делает сигнал более надежным, поскольку он менее чувствителен к электрическим помехам и более точен благодаря более высокому разрешению.
Это делает сигнал более надежным, поскольку он менее чувствителен к электрическим помехам и более точен благодаря более высокому разрешению.
3. Inrunner или Outrunner
Принцип:
Каждый бесколлекторный двигатель состоит из двух основных частей: статора и ротора. Статор статичен, он не двигается и удерживает электромагниты. Ротор представляет собой вращающийся компонент, удерживающий постоянные магниты. Существует два типа бесколлекторных двигателей постоянного тока: модели Inrunner и Outrunner. В роторных двигателях ротор вращается «внутри» статора или дальше внутрь относительно корпуса двигателя. Двигатели Outrunner имеют противоположную настройку, поскольку ротор вращается «снаружи» статора или дальше наружу, см. рис. 6. Обе модели имеют свои плюсы и минусы в разных приложениях. При сравнении инраннера и аутраннера одного размера легко увидеть, что диаметр, на который действуют силы, разный. Это происходит потому, что электромагниты занимают намного больше места, чем ротор, несущий постоянные магниты. Если электромагниты расположены внутри, то диаметр больше, чем если бы они были расположены снаружи (рис. 6). В дополнение к размеру важно также учитывать последствия для производительности двигателя. Больший диаметр означает больший крутящий момент, потому что сила прикладывается дальше от центра вращения, а меньший диаметр лучше подходит для высоких оборотов. Таким образом, инраннеры лучше всего работают на высокой скорости, но генерируют меньший крутящий момент, в то время как аутраннеры лучше всего работают с большими винтами, потому что они могут выдавать больший крутящий момент, но вращаются с меньшей скоростью.
Если электромагниты расположены внутри, то диаметр больше, чем если бы они были расположены снаружи (рис. 6). В дополнение к размеру важно также учитывать последствия для производительности двигателя. Больший диаметр означает больший крутящий момент, потому что сила прикладывается дальше от центра вращения, а меньший диаметр лучше подходит для высоких оборотов. Таким образом, инраннеры лучше всего работают на высокой скорости, но генерируют меньший крутящий момент, в то время как аутраннеры лучше всего работают с большими винтами, потому что они могут выдавать больший крутящий момент, но вращаются с меньшей скоростью.
Применение в индустрии дронов:
По причинам, описанным выше, в eVTOL часто используются аутраннеры для вертикальной тяги из-за их высокого крутящего момента. Inrunners чаще используются для реактивных двигателей с воздуховодами или самолетов с неподвижным крылом, а также для горизонтальных движений, требующих высоких оборотов. Это легко понять по значению Kv двигателя, также известному как его значение RPM/Volt. Это значение определяет, с какой скоростью будет вращаться двигатель, если через него подается 1 В. Следовательно, инраннер обычно имеет более высокое значение Kv, чем аутраннер того же размера, потому что, как указано выше, инраннер имеет меньший ротор, который вращается быстрее при том же напряжении. Часто при просмотре бесколлекторных двигателей первым отображается значение Kv.
Это значение определяет, с какой скоростью будет вращаться двигатель, если через него подается 1 В. Следовательно, инраннер обычно имеет более высокое значение Kv, чем аутраннер того же размера, потому что, как указано выше, инраннер имеет меньший ротор, который вращается быстрее при том же напряжении. Часто при просмотре бесколлекторных двигателей первым отображается значение Kv.
Дополнительная литература: Почему вы должны тестировать двигатели и пропеллеры вашего дрона
4. Эффективность и производительность
Говоря о характеристиках дрона, мы часто думаем о времени полета. К сожалению, самые передовые аккумуляторные технологии не могут конкурировать с газовыми двигателями по соотношению веса и энергии. Единственным решением является тщательный выбор электрических компонентов, которые будут наиболее эффективно использовать заряд батареи. Многие факторы могут оптимизировать энергопотребление батареи. Одним из таких факторов является КПД двигателя. Более высокая эффективность помогает увеличить соотношение веса и энергии, тем самым повышая производительность двигателя и самого дрона. Тестирование двигателя имеет решающее значение для понимания различий между спецификациями производителя и качеством двигателя. Чтобы продемонстрировать эту идею, мы представляем сравнение двух похожих двигателей BLDC с разными ценовыми диапазонами. Для сравнения производительности двигателей мы использовали тестовый стенд RCbenchmark Series 1580. Он способен измерять тягу, крутящий момент, напряжение, ток, число оборотов в минуту и эффективность. Сбор данных осуществляется с помощью программного обеспечения RCbenchmark. Были протестированы два двигателя T2407 мощностью 1500 кв и 2300 кв соответственно. Оба мотора вращают один и тот же 7-дюймовый винт с шагом 4,
Более высокая эффективность помогает увеличить соотношение веса и энергии, тем самым повышая производительность двигателя и самого дрона. Тестирование двигателя имеет решающее значение для понимания различий между спецификациями производителя и качеством двигателя. Чтобы продемонстрировать эту идею, мы представляем сравнение двух похожих двигателей BLDC с разными ценовыми диапазонами. Для сравнения производительности двигателей мы использовали тестовый стенд RCbenchmark Series 1580. Он способен измерять тягу, крутящий момент, напряжение, ток, число оборотов в минуту и эффективность. Сбор данных осуществляется с помощью программного обеспечения RCbenchmark. Были протестированы два двигателя T2407 мощностью 1500 кв и 2300 кв соответственно. Оба мотора вращают один и тот же 7-дюймовый винт с шагом 4,
На первом графике на рисунке 7 показан КПД обоих двигателей по сравнению с дроссельной заслонкой. На втором графике показана эффективность на определенных скоростях. Очевидно, что меньшему двигателю на 1500 кВт требуется больше дроссельной заслонки для эффективной работы. Он не будет достигать такой же эффективности, как двигатель 2300 кВт в этой конфигурации с тем же гребным винтом. Диапазон КПД также лучше у двигателя 2300 кВт, что означает, что двигатель сохраняет высокий КПД как на низкой, так и на максимальной скорости.
Он не будет достигать такой же эффективности, как двигатель 2300 кВт в этой конфигурации с тем же гребным винтом. Диапазон КПД также лучше у двигателя 2300 кВт, что означает, что двигатель сохраняет высокий КПД как на низкой, так и на максимальной скорости.
С другой стороны, меньший двигатель может работать на более высокой скорости и, вероятно, будет более эффективным с меньшим винтом. Беспилотник, используемый для транспортировки, будет использовать двигатель меньшего размера, чтобы он мог оставаться на холостом ходу и стабильно работать на низкой скорости.
Чтобы получить полное сравнение, нам нужно знать назначение дрона и скорость, с которой он будет работать. Возможно, двигатель 1500 кВт более эффективен с другим винтом, подходящим для другой функции. Только через тестирование мы можем узнать.
5. Выбор двигателя
Наконец, поговорим о том, на что обращать внимание при выборе двигателя. Наиболее важной характеристикой двигателя является Kv, которая описывает скорость вращения, которую вы получаете за мощность, подводимую к двигателю. Двигатель с 2000 кВ будет вращаться со скоростью 2000 оборотов в минуту на каждый вольт, подаваемый на двигатель. Размер тесно связан с Kv. Широкий и большой двигатель часто будет иметь более высокий крутящий момент, но более низкое Kv и использовать больший гребной винт, в то время как тонкий, но более длинный двигатель будет иметь высокое Kv, низкий крутящий момент и лучше всего подходит для небольшого гребного винта. Это имеет смысл, если учесть, что большой двигатель работает на более низких оборотах, а маленький двигатель работает на относительно высоких оборотах.
Двигатель с 2000 кВ будет вращаться со скоростью 2000 оборотов в минуту на каждый вольт, подаваемый на двигатель. Размер тесно связан с Kv. Широкий и большой двигатель часто будет иметь более высокий крутящий момент, но более низкое Kv и использовать больший гребной винт, в то время как тонкий, но более длинный двигатель будет иметь высокое Kv, низкий крутящий момент и лучше всего подходит для небольшого гребного винта. Это имеет смысл, если учесть, что большой двигатель работает на более низких оборотах, а маленький двигатель работает на относительно высоких оборотах.
Также следует учитывать максимальную мощность двигателя. Превышение ограничения мощности двигателя приведет к его нагреву и, таким образом, резкому снижению его эффективности или даже повреждению. Бренд также может изменить производительность двигателя. При одном и том же значении Kv двигатель одной марки может работать лучше, чем другие. Вот почему вы должны проверить свой мотор, прежде чем строить дрон вокруг него.
Дополнительная литература: Как рассчитать Kv бесщеточного двигателя и количество полюсов двигателя
Как правило, целесообразно использовать самый маленький (самый легкий) двигатель, не рискуя перегрузить его и перегреть. Причина этого заключается в том, чтобы уменьшить лишний вес двигателя, который больше, чем необходимо. Мы составили список крупных производителей двигателей с продуктами, подходящими для работы с тяжелыми и пилотируемыми дронами.
Заключение
Бесщеточный двигатель постоянного тока — гениальное изобретение, изменившее правила игры в мире электрических двигателей. Простые и обтекаемые по конструкции, они позволяют транспортным средствам, таким как радиоуправляемые автомобили и дроны, работать с высокой эффективностью и максимальным контролем.
В этой статье мы рассмотрели, как работают двигатели, их компоненты и различные типы двигателей BLDC. Мы также рассмотрели электромагнетизм и то, как ESC управляет скоростью двигателя. Этот фон помогает нам понять, как максимизировать эффективность и как требования различаются в зависимости от использования дрона.
Этот фон помогает нам понять, как максимизировать эффективность и как требования различаются в зависимости от использования дрона.
Если вам понравилась эта статья, вы можете ознакомиться с другим нашим контентом. Мы стремимся создавать качественные учебные материалы для разработчиков и инженеров дронов. Если у вас есть какие-либо вопросы или идеи для другого контента, который вы хотели бы видеть, оставьте нам комментарий ниже.
Китайский производитель двигателей BLDC, электронный регулятор скорости, поставщик пропеллеров
T-DRONES и двигатели для пилотируемых самолетов
Видео
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Видео
T-Drones Professional Industry Uav 5kg Полезная нагрузка M1200 Drone для съемки, картографирования, наблюдения, спасения, инспекции и доставки и т. Д.
Д.
Цена на условиях ФОБ:
2,79 долларов США9-3599
/ шт.
Мин. Заказ:
1 шт.
Свяжитесь сейчас
Видео
Свяжитесь сейчас
Свяжитесь сейчас
Двигатели, ESC, пропеллеры для сельского хозяйства
Свяжитесь сейчас
Видео
Свяжитесь сейчас
Видео
Свяжитесь сейчас
Свяжитесь сейчас
Видео
Свяжитесь сейчас
Свяжитесь сейчас
Двигатели, ESC, опоры для VTOL/eVTOL
Видео
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Профиль компании
{{ util. each(imageUrls, функция(imageUrl){}}
each(imageUrls, функция(imageUrl){}}
{{ }) }}
{{ если (изображениеUrls.length > 1){ }}
{{ } }}
| Вид бизнеса: | Производитель/фабрика и торговая компания | |
| Основные продукты: | BLDC двигатель , Электронный контроль скорости , Пропеллер | |
| Количество работников: | 359 | |
| Год основания: | 2009-10-14 | |
| Сертификация системы менеджмента: | ИСО9001:2015 | |
| Среднее время выполнения: | Время выполнения в пиковый сезон: один месяц Время выполнения в межсезонье: один месяц |
Информация отмечена
проверяется
БВ
T-MOTOR, торговая марка NANCHANG THREE LUCK MODE Co. , Ltd., предлагает решения для силовой установки для БПЛА с передовыми технологиями, специализируясь на двигателях, ESC (электронный регулятор скорости) и гребных винтах. Широко используемый для аэрофотосъемки, промышленного, сельскохозяйственного и коммерческого применения, T-MOTOR заслужил высокую репутацию за высокое качество, получив авторитетные отзывы от 300 000 клиентов и 150 дистрибьюторов по всему миру.
, Ltd., предлагает решения для силовой установки для БПЛА с передовыми технологиями, специализируясь на двигателях, ESC (электронный регулятор скорости) и гребных винтах. Широко используемый для аэрофотосъемки, промышленного, сельскохозяйственного и коммерческого применения, T-MOTOR заслужил высокую репутацию за высокое качество, получив авторитетные отзывы от 300 000 клиентов и 150 дистрибьюторов по всему миру.
T-motor также работает над приложением Robot, ROV, Skateboard
Наш …
Просмотреть все
Доска объявлений
7 шт.
BLDC МОТОР OEM
Дизайн 3D-моделирования
Образец готов
Тест для двигателя дрона
Наш ЧПУ
Наш офис
T-DRONES
Пошлите Ваше сообщение этому продавцу
* От:
* Кому:
Мисс Николь
* Сообщение:
Введите от 20 до 4000 символов.
Это не то, что вы ищете?
Опубликовать запрос на поставку сейчас
Компоненты MAD 3506 Бесщеточный двигатель EEE 400 кВ для дрона – Oz Robotics
Компоненты MAD 3506 Бесщеточный двигатель EEE 400 кВ для дрона
Руководства по продукту
Если применимо, документация по продукту, брошюры, справочные материалы. Файл(ы) STEP и другие файлы чертежей, руководства и учебные пособия будут доступны для загрузки при покупке. Кроме того, электронное письмо с подтверждением заказа будет содержать ссылку для загрузки на файл(ы) продукта, который также можно загрузить с веб-сайта 9.0091 Мой аккаунт раздел при необходимости.
Политика доставки
МЫ ДОСТАВЛЯЕМ ПО ВСЕМУ МИРУ: В основном мы отправляем через FedEx, UPS, DHL, EMS, TNT и USPS, поскольку они быстрые, надежные и легко отслеживаемые. Обычно мы отправляем в течение двух-трех рабочих дней после полной оплаты. Стандартная доставка обычно происходит в течение 5-7 рабочих дней после даты отправки. Однако иногда доставка может занять от 7 до 10 рабочих дней, в зависимости от пункта назначения доставки, режима логистики, погодных условий, веса продукта, размера или структуры распределения транспортной компании на основе перепланирования, например нехватки персонала, вызванной COVID.
Обычно мы отправляем в течение двух-трех рабочих дней после полной оплаты. Стандартная доставка обычно происходит в течение 5-7 рабочих дней после даты отправки. Однако иногда доставка может занять от 7 до 10 рабочих дней, в зависимости от пункта назначения доставки, режима логистики, погодных условий, веса продукта, размера или структуры распределения транспортной компании на основе перепланирования, например нехватки персонала, вызванной COVID.
СТОИМОСТЬ ДОСТАВКИ:
Для некоторых промышленных товаров, например тяжелых колес, станков с ЧПУ и т. д., стоимость доставки рассчитывается на основе веса продукта, а не количества. Чтобы воспользоваться более низкой стоимостью доставки для заказов, состоящих из нескольких товаров, не стесняйтесь обращаться к нам по адресу [email protected]. Наши тарифы на доставку очень четко указаны на странице каждого продукта во вкладке «ДОСТАВКА». Кроме того, чтобы увидеть стоимость доставки для вашей страны, добавьте товар в корзину; Вы увидите стоимость доставки в зависимости от вашей страны и местоположения.
ТАМОЖНИ И ТАРИФЫ: Хотя не для всех продуктов требуется тариф, для некоторых продуктов может потребоваться минимальный тариф, если это применимо в вашей стране, для заказов на сумму 800,00 долларов США и выше. Общая сумма вашего заказа не включает таможенную пошлину/тариф. Тариф принадлежит покупателю, когда это применимо. Почему мы не добавляем тарифы к розничной цене товара? — Если бы все страны вычитали одинаковую сумму тарифа, мы бы добавили сумму тарифа к цене товара. Однако мы этого не делаем, потому что каждая страна взимает разную сумму, а некоторые вообще не взимают. Поэтому мы не можем добавить какой-либо тариф к розничной цене продукта. Oz Robotics, партнер-производитель или поставщик не несут ответственности за тарифы. Пожалуйста, проверьте этикетки «Сделано в» и «Сделано в» на странице продукта, чтобы увидеть происхождение продукта. Общая сумма вашего заказа не включает пошлины, налоги на импорт, таможенные сборы и налог на товары и услуги. Покупатель должен оплатить все импортные пошлины. Нажмите здесь, чтобы узнать больше о тарифах.
Нажмите здесь, чтобы узнать больше о тарифах.
Политика возврата
COVID: Мы приостанавливаем возврат продукции из-за текущей пандемии COVID-19, если нет производственного брака. Пожалуйста, изучите продукт и задайте нам вопросы перед покупкой. Спасибо.
ОТМЕНА ЗАКАЗА: После размещения заказа у вас есть 5 часов, чтобы запросить отмену заказа. Через 5 часов ваши товары либо уже отправлены, либо подготовлены к отправке, либо в настоящее время изготавливаются на заказ. Это означает, что мы не будем обрабатывать ваш запрос на отмену по истечении этого периода. Размещая заказ, вы подтверждаете, что согласны с нашей Политикой отмены заказов.
ПЛАТА ЗА УСЛУГИ PAYPAL и STRIPE: Обратите внимание, что PayPal и Stripe не возмещают плату за обслуживание, которую они взимают при покупке продукта. Поэтому, если после размещения заказа вы передумаете и попросите возмещение, мы вычтем плату за обслуживание для PayPal или Stripe, в зависимости от того, какой из них вы использовали для покупки. Если у вас есть какие-либо вопросы по этому поводу, обратитесь в PayPal или Stripe.
Если у вас есть какие-либо вопросы по этому поводу, обратитесь в PayPal или Stripe.
ПОЛИТИКА ОБМЕНА: Oz Robotics хочет, чтобы вы остались довольны своей новой покупкой. Тем не менее, мы соблюдаем политику обмена наших поставщиков, потому что мы не производим эти продукты; наши поставщики делают. После того, как вы воспользовались продуктом, наш поставщик(и) и мы имеем право не возвращать деньги. Тем не менее, мы предложим обмен ошибочно приобретенных товаров или продуктов с серьезными и необратимыми дефектами или техническими проблемами. Покупатель оплачивает стоимость доставки неправильно приобретенных товаров или любых других подобных проблем. Если приобретенный вами продукт неисправен, напишите нам по адресу [email protected], приложив несколько фотографий или видео дефектных деталей, чтобы оценить их перед отправкой. Нажмите ЗДЕСЬ, чтобы узнать больше о политике возврата и замены
ПОЛИТИКА ВОЗВРАТА: Oz Robotics принимает возмещение на минимальной основе, если нет производственного брака. Для любых электронных товаров возврат принимается только для устройств с серьезными и необратимыми проблемами; Между тем, клиент должен подать заявку на возврат в течение семи дней с даты доставки. Перед принятием возмещения, пожалуйста, включите изображения или видео и любые другие материальные доказательства дефекта. Тем не менее, мы соблюдаем политику обмена наших поставщиков, потому что мы не производим эти продукты; наши поставщики делают. Для получения дополнительной информации о политике возврата и замены посетите страницу Политика возврата и замены.
Для любых электронных товаров возврат принимается только для устройств с серьезными и необратимыми проблемами; Между тем, клиент должен подать заявку на возврат в течение семи дней с даты доставки. Перед принятием возмещения, пожалуйста, включите изображения или видео и любые другие материальные доказательства дефекта. Тем не менее, мы соблюдаем политику обмена наших поставщиков, потому что мы не производим эти продукты; наши поставщики делают. Для получения дополнительной информации о политике возврата и замены посетите страницу Политика возврата и замены.
Помимо политики нашего поставщика по умолчанию, после согласования возврата вы можете отправить дефектный товар на указанный обратный адрес, который вы должны получить от нас в первую очередь. Пожалуйста, отправьте заказ в оригинальной упаковке со всеми принадлежностями и дополнительными деталями. Если Требуемые детали не будут отправлены обратно, за них будет выставлен счет или ожидается их отправка на более позднем этапе. И только после того, как все товары будут доставлены, наши сотрудники проверят возвращенный товар на тестирование. Включите в свой пакет подписанное письмо с указанием причины вашего возврата и оригинальную квитанцию, а также любые упомянутые доказательства дефекта, изображения или видео и т. д. Это поможет нам ускорить процесс от вашего имени.
Включите в свой пакет подписанное письмо с указанием причины вашего возврата и оригинальную квитанцию, а также любые упомянутые доказательства дефекта, изображения или видео и т. д. Это поможет нам ускорить процесс от вашего имени.
Покупатель (заказчик/покупатель) несет ответственность за все расходы по доставке при возврате товара. Однако при получении возвращенного заказа мы оценим товар. Если будет установлено, что на самом деле существует производственный брак, мы возместим стоимость доставки, а также отремонтируем или заменим или возместим полную сумму покупателю, если продукт не подлежит ремонту.
Если вы хотите вернуть неиспользованный продукт, сделайте это в течение семи дней с даты отправки для возмещения покупной цены за вычетом доставки и обработки. Возврат будет зачислен на исходную кредитную карту, использованную для оплаты, в течение 24-48 ЧАСОВ после получения товара обратно. Мы будем взимать плату за пополнение запасов 50%.
После того, как ваше возвращение будет получено и проверено, и если будет согласовано возмещение, возмещение будет зачислено на исходную кредитную карту, использованную для оплаты, в течение 24-48 часов. Обратите внимание, что мы взимаем 50% комиссию за пополнение запасов, как только вы вернете товар без каких-либо дефектов.
Обратите внимание, что мы взимаем 50% комиссию за пополнение запасов, как только вы вернете товар без каких-либо дефектов.
Как только ваш возврат будет обработан, PayPal вернет деньги на использованную карту. Это может занять не менее пяти рабочих дней (в зависимости от банка и кредитной компании), прежде чем ваш возврат будет опубликован на вашем банковском счете и в выписках. Свяжитесь с нами, если вы все еще не получили возмещение через 5 рабочих дней.
Не возвращайте товар в наш офис в Нью-Йорке. Для любого обмена или возмещения, пожалуйста, сначала напишите нам по адресу [email protected], чтобы мы предоставили вам шаги, которые необходимо выполнить. Любой продукт, который вы возвращаете, должен быть в том же состоянии, в котором вы его получили, и должен быть возвращен в оригинальной упаковке без использования. Пожалуйста, сохраните оригинал квитанции.
Подробнее о политике возврата и замены.
Ссылка на продукт будет добавлена к вашему вопросу автоматически при отправке.
