Содержание
6.8 Потери и кпд машин постоянного тока
При
работе генератора (или двигателя)
постоянного тока полезная (выходная)
мощность, отдаваемая машиной, всегда
меньше подводимой от первичного
двигателя (или сети) за счет наличия
нескольких видов потерь мощности.
Электрические
потери возникают
в обмотке якоря, в обмотке возбуждения,
обмотке добавочных полюсов и в щеточном
контакте.
Потери
в стали
складываются из потерь на перемагничивание
(гистерезис) и вихревые токи в стальном
сердечнике якоря при его вращении в
постоянном магнитном поле.
Механические
потери
обусловлены потерями на трение в
подшипниках, щеток о коллектор, потерями
на вентиляцию и составляют от (1…4)%.
Добавочные
потери
обусловлены потерями в стали полюсных
наконечников от пульсации магнитного
потока при вращении зубчатого якоря,
и составляют 1% от отдаваемой мощности
для генераторов и 1% от потребляемой
мощности для двигателей.
КПД
машины определяется отношением полезной
мощности Р2
к потребляемой мощности Р1
и
составляется: для генераторов
(6.2) |
где
UI –
мощность, отдаваемая потребителю; ∑∆Р
– суммарные потери.
Для двигателей
(6.3) |
где
UI
– мощность, потребляемая двигателем
от сети.
КПД
машины постоянного тока зависит от
нагрузки (рисунок 6.9) и при номинальной
мощности составляет от 75 до 95%.
Рисунок
6. 9 – Зависимость КПД машины постоянного
9 – Зависимость КПД машины постоянного
тока от нагрузки
7 Асинхронные и синхронные машины
Лекция
7
Цель
лекции: Ознакомление
с устройством, принципом действия,
режимами работы и основными характеристиками
асинхронных и синхронных машин.
Асинхронные машины
7.1. Устройство асинхронных машин
Асинхронные
машины являются самым распространенным
видом бесколлекторных электрических
машин переменного тока. Асинхронная
машина – машина переменного тока, у
которой в установившемся режиме
магнитное поле статора, участвующее в
основном процессе преобразования
энергии, и ротор вращаются с разными
скоростями.
Преобладающее
применение имеют асинхронные
двигатели,
составляющие основу современного
электропривода: привод устройств
автоматики, бытовые электроприборы,
привод крупного горного оборудования.
Асинхронные
двигатели могут быть как однофазными,
так и трехфазными. Кроме асинхронных
Кроме асинхронных
двигателей, преобразующих электрическую
энергию переменного тока в механическую
энергию, имеются асинхронные машины,
выполняющие функции преобразователя
частоты, регулятора напряжения и
фазорегулятора.
Асинхронный
двигатель состоит из двух частей,
разделенных воздушным зазором:
неподвижного статора
и вращающегося ротора.
Каждая из этих частей имеет сердечник
и обмотку. Обмотка статора включается
в сеть и является первичной, а обмотка
ротора – вторичной, так как энергия в
нее поступает из обмотки статора за
счет магнитной связи между этими
обмотками. По конструкции асинхронные
двигатели разделяются на двигатели: с
короткозамкнутым ротором
и двигатели с
фазным ротором.
Двигатели
трехфазного асинхронного двигателя с
короткозамкнутым ротором,
(рисунок
7.1) имеют наиболее широкое применение.
Статор
состоит из
корпуса и сердечника с трехфазной
обмоткой.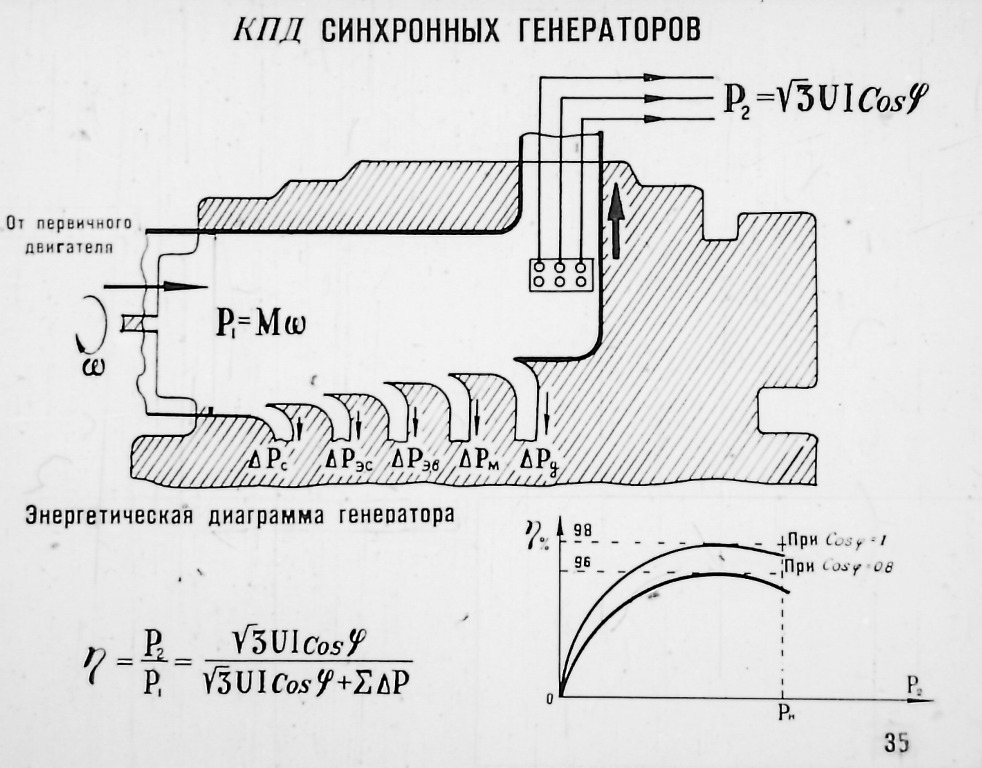 Каждая фазная обмотка состоит
Каждая фазная обмотка состоит
из одной или нескольких катушечных
групп, которые располагаются по
окружности статора на одинаковом
расстоянии друг от друга. Фазные обмотки
соединяются треугольником или звездой
и подключаются к трехфазной сети. Корпус
двигателя отливают из алюминиевого
сплава или из чугуна. Поверхность
корпуса имеет продольные ребра для
охлаждения двигателя. В корпусе
расположен
сердечник
статора, имеющий шихтованную конструкцию:
отштампованные листы из тонколистовой
электротехнической стали толщиной 0,5
мм покрыты слоем изоляционного лака,
собраны в пакет и скреплены скобами
или сварными швами. Такая конструкция
уменьшает вихревые токи, возникающие
в процессе перемагничивания сердечника
вращающимся магнитным полем. На
внутренней поверхности сердечника
статора имеются продольные пазы, в
которых расположены пазовые части
обмотки статора, соединенные лобовыми
частями.
В
расточке статора расположен ротор,
состоящий из вала и сердечника с
обмоткой, представляющей собой
алюминиевые или медные стержни,
расположенные в пазах сердечника ротора
и замкнутые с двух сторон короткозамыкающими
кольцами. Сердечник ротора также имеет
Сердечник ротора также имеет
шихтованную конструкцию, но листы
ротора не покрыты изоляционным лаком,
а имеют на своей поверхности тонкую
пленку окисла.
Другая
разновидность трехфазных асинхронных
двигателей – двигатели
с фазным ротором –
конструктивно
отличается устройством ротора, который
имеет более сложную конструкцию. На
валу ротора закреплен шихтованный
сердечник с трехфазной обмоткой,
выполненной аналогично обмотке статора.
Эту обмотку соединяют звездой, а ее
концы присоединяют к трем контактным
кольцам, на которые накладывают по две
щетки, располагаемые в щеткодержателях
на валу. Асинхронные двигатели с фазным
ротором имеют более сложную конструкцию
и менее надежны, но обладают лучшими
регулировочными и пусковыми свойствами.
Рисунок
7.1. Асинхронный двигатель с короткозамкнутым
ротором:
1
– вал; 2, 6 – подшипники; 3, 7 – подшипниковые
щиты; 4 –коробка выводов; 5, 8 – вентилятор
и его кожух; 9 – сердечник ротора с
короткозамкнутой обмоткой; 10 – сердечник
статора с обмоткой; 11– корпус; 12 – лапы
|
КАТЕГОРИИ: Археология
ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрации Техника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы.
|
⇐ ПредыдущаяСтр 14 из 14 Коэффициентом полезного действия называется отношение полезной мощности Р2 к потребляемой мощности 𝑃2 Р1 𝜂 = (140). Для современных машин постоянного тока КПД находится в пределах: 𝑃1 1) Мощность больше 10 кВт – 83-87%; 2) Мощность более 100 кВт – 88-93%; 3) Более 1000 кВт – 92-96%; 4) И только у электрических машин малой мощности этот показатель очень низкий, например, электрическая машина мощность 10 Вт, ее КПД 30-40%. Зависимость КПД от нагрузки представлена на (рис. 4.74 методичка). В режиме холостого хода КПД машины постоянного тока равен нулю. Нет полезной мощности Р2=0. При увеличении нагрузки КПД резко возрастает, что связано с небольшой величиной переменных потерь и практически неизменными постоянными потерями. При некоторой нагрузке КПД достигает максимального значения. Существуют два способа определения КПД: 1) Прямой; 2) Косвенный; В машинах постоянного тока, как и в других электрических машинах, прямой способ не применяют, так как величины Р2 и Р1 по своим значениям близки друг к другу. А это значит, есть вероятность неверного определения КПД. Поэтому для машин постоянного тока применяют косвенный метод, заключающийся в том, что определяют потери в машине (суммарные потери). И на основании их определяют КПД. Однако КПД определяют по формулам ∑𝑃 𝜂 = 1 − L 66scM+tH/qBhGyslJRwyNFDh3GVah7Imh3HmO2LxDr53GOXsK217HKXctfo+SRbaYcOyUGNH65rK 4/bkDLyNOK4e0pdhczysz9+7+fvXJiVjbm+m1TOoSFO8hOEXX9ChEKa9P7ENqjUgj8Q/FW+eLEDt JfMIusj1f/TiBwAA//8DAFBLAQItABQABgAIAAAAIQC2gziS/gAAAOEBAAATAAAAAAAAAAAAAAAA AAAAAABbQ29udGVudF9UeXBlc10ueG1sUEsBAi0AFAAGAAgAAAAhADj9If/WAAAAlAEAAAsAAAAA AAAAAAAAAAAALwEAAF9yZWxzLy5yZWxzUEsBAi0AFAAGAAgAAAAhAMSyF3l6AgAAUwYAAA4AAAAA AAAAAAAAAAAALgIAAGRycy9lMm9Eb2MueG1sUEsBAi0AFAAGAAgAAAAhAJFJqfDZAAAAAgEAAA8A AAAAAAAAAAAAAAAA1AQAAGRycy9kb3ducmV2LnhtbFBLBQYAAAAABAAEAPMAAADaBQAAAAA= «> , для ГПТ 𝑃н+∑𝑃 𝜂 , для ДПТ 𝑃1 (141). Когда машина постоянного тока работает двигателем, то более точнее можно определить потребляемую мощность по электрическим величинам: напряжению и току. Для генератора отдаваемую мощность так же более точнее определять через электрические величины напряжения и тока. В машинах постоянного тока есть два вида потерь: 1) Постоянные потери; 2) Переменные потери; Постоянные потери — это потери, которые не зависят от нагрузки, их обозначим через Ро. Переменные потери состоят из двух составляющих: потери которые пропорциональны нагрузке в первой степени, обозначим через Р1. Вторую составляющую переменный потерь обозначим через Р2, которые пропорциональны квадрату нагрузки. 𝑃 𝑃 𝑃 Тогда можно записать 𝜂 (142), определим значение КПД при такой нагрузке, когда этот КПД достигает максимального значения. Для этого рассмотрим в качестве примера генератор постоянного тока с независимым возбуждением. Для такого генератора будем считать, что выходное напряжение U остается неизменным, тогда для такого генератора полезная мощность будет равна 𝑃2 = 𝐼𝑎 𝑈н𝐼𝑎 = 𝑈н𝐼н 𝐼н = 𝑃2нКнг (143). 𝐼𝑎 Кнг = 𝐼н (144) называется коэффициентом нагрузки, относительная доля некоторой нагрузки по отношению к номинальной. В свете рассуждений запишем выражение для КПД: 𝜂 = К нгР +𝑃Кнг+КР2нР +К2 𝑃2 (145). 2н 0 нг 1 нг LECTION #14 Возьмем КПД по коэффициенту нагрузки, исходя из выражения для КПД получим 𝑑 𝑑𝜂Кнг = КнгР2𝑃н2+н(𝑃𝑃0+𝜕−ККнг2нгР1𝑃+2)К2нг𝑃2 (146). Полученное выражение приравняем к нулю. Данное уравнение удовлетворяется, если знаменатель равен бесконечности. То есть, коэффициент нагрузки равен также бесконечности. Однако, это условие не представляет интереса. Приравняем числитель данного выражения к нулю 𝑃2Н(Р0 − К2нг𝑃2) = 0, 𝑃0 = К2нг𝑃2(147). Режим генератора Рассмотрим процесс преобразования энергии в машинах постоянного тока для генераторного режима на примере генератора постоянного тока с постоянным возбуждением, который приводится во вращение с помощью приводного двигателя с установившимся режимом работы при n=const. Это преобразование проиллюстрируем с помощью энергетической диаграммы. Если при независимом возбуждении возбудитель, который питает обмотку возбуждения и находится на одном валу с генератором постоянного тока, то мощность возбуждения не учитывается в мощность, которая подводится к валу этого генератора. Если это так, то тогда эта мощность не учитывается. Часть мощности Р1 (механической мощности), которая поступает на вал генератора, идет на покрытие механических потерь в генераторе. Рмг) (148). Часть этой мощности (электромагнитной) расходуется на покрытие электрических потерь в обмотке якоря, в которую входят все потери обмоток, которые включены последовательно с обмоткой якоря. Другая часть этой мощности идет на компенсацию потерь на переходном сопротивлении определяемой щетками. Эти составляющие можно рассчитать Рэла = 𝐼𝑎2𝑅𝑎 Рщ = ∆𝑈щ𝐼𝑎(149). Возникающие при работе генератора добавочные потери особо не учитываются. Частично не включают магнитные потери в стали одну часть, а другую часть в электрические потери обмотки якоря. Тогда полезную мощность можно рассчитать через электрические величины 𝑃2 = 𝑈𝐼𝑎 = 𝑃эм − (Рэла + Рщ) = Рэм − (𝐼𝑎2𝑅𝑎 + ∆𝑈щ𝐼𝑎) (150). Электромагнитная мощность — это мощность которая связывает подводимую механическую мощность к валу генератора и полезную мощность, которая отдается потребителю. Режим двигателя Рассмотрим процесс преобразования энергии для двигательного режима на примере двигателя постоянного тока, работающего в установившемся режиме при неизменной частоте вращения n=const. Рассмотрим этот вопрос на примере двигателя постоянного тока с параллельным возбуждением. Из сети двигатель постоянного тока потребляет электрическую мощность Р1 𝑃1 = 𝑈𝐼н = 𝑈(𝐼𝑎 +𝐼𝑏) (151). Часть этой мощности расходуется на компенсацию электрических потерь в обмотке возбуждение. Другая часть этой мощности идет на покрытие электрических потерь в обмотке якоря. Еще одна часть этой мощности идет на покрытие потерь, имеющих место на щетках. Каждую из этих составляющих потерь определяются по формулам какие свойственны для генератора постоянного тока. Оставшееся мощность — это электромагнитная мощность, которую можно рассчитать Рэм = Рмех = Еа𝐼𝑎 = 𝑃1 − (∆𝑃𝑏 + Рэла + Рщ) = 𝑈(𝐼𝑎 + 𝐼𝑏) − 𝑈𝐼𝑏 − 𝐼𝑎2𝑅𝑎 + ∆𝑈щ 𝐼𝑎 (152). Эта электромагнитная мощность в свою очередь преобразуется в механическую мощность. Эти мощности можно рассчитать на основании энергетической диаграммы. Тогда Рэм = Рмех = 𝑈𝐼𝑎 − (𝐼𝑎2𝑅𝑎 + ∆𝑈щ𝐼𝑎) (153) полезная мощность двигателя постоянного тока определяется следующим образом: часть электромагнитной мощности идет на компенсацию магнитных потерь в стали двигателя. Другая часть этой мощности идет на компенсацию механических потерь в двигателе. Оставшаяся мощность — это полезная мощность Р2, которая поступает с вала двигателя на вал рабочего механизма. С учетом энергетической диаграммы полезную мощность можно определить 𝑃2 = 𝑃эм − (Рмг + Рмех) (154). Так как сумма магнитных и механических потерь — это потери холостого хода (постоянные потери), то полезную мощность можно рассчитать по соответствующей формуле Р2 = Рэм − Р0(155).
⇐ Предыдущая567891011121314 Читайте также: Техника прыжка в длину с разбега Тактические действия в защите История Олимпийских игр История развития права интеллектуальной собственности |
|
|
Последнее изменение этой страницы: 2017-01-19; просмотров: 931; Нарушение авторского права страницы; Мы поможем в написании вашей работы!
infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь — 161.97.168.212 (0.007 с.
|
 Определение реакций опор и моментов защемления
Определение реакций опор и моментов защемления
 Дальнейшее повышение нагрузки приводит к снижению КПД, что связано со значительным увеличением переменных потерь, которые пропорциональны нагрузке в квадрате. Но при этом, полезная мощность растет медленнее чем переменные потери, так как полезная мощность пропорциональна нагрузке в первой степени.
Дальнейшее повышение нагрузки приводит к снижению КПД, что связано со значительным увеличением переменных потерь, которые пропорциональны нагрузке в квадрате. Но при этом, полезная мощность растет медленнее чем переменные потери, так как полезная мощность пропорциональна нагрузке в первой степени.
 Условие определяющее максимальное значение КПД. То есть, КПД в машине постоянного тока достигает максимального значения при условии, что постоянные потери равны переменным потерям, что видно на (рис. 4.74 методичка).
Условие определяющее максимальное значение КПД. То есть, КПД в машине постоянного тока достигает максимального значения при условии, что постоянные потери равны переменным потерям, что видно на (рис. 4.74 методичка). Другая часть этой мощности идет на покрытие магнитных потерь в сталь генератора. Оставшееся мощность — это электромагнитная мощность, которую можно определить через электрические величины генератора, либо с помощью энергетической диаграммы Рэм = Еа𝐼𝑎 = 𝑃1 − (𝑃мех +
Другая часть этой мощности идет на покрытие магнитных потерь в сталь генератора. Оставшееся мощность — это электромагнитная мощность, которую можно определить через электрические величины генератора, либо с помощью энергетической диаграммы Рэм = Еа𝐼𝑎 = 𝑃1 − (𝑃мех +

 )
)
| ||||||||||
| ||||||||||
| ||||||||||
| ||||||||||
| © 2006-2022 Издательство ГРАМОТА разработка и создание сайта, поисковая оптимизация: | ||||||||||
 Полученные результаты позволяют более обоснованно произвести выбор рабочих параметров бесконтактного двигателя постоянного тока дискового типа и режимов его работы на этапе его проектирования.
Полученные результаты позволяют более обоснованно произвести выбор рабочих параметров бесконтактного двигателя постоянного тока дискового типа и режимов его работы на этапе его проектирования.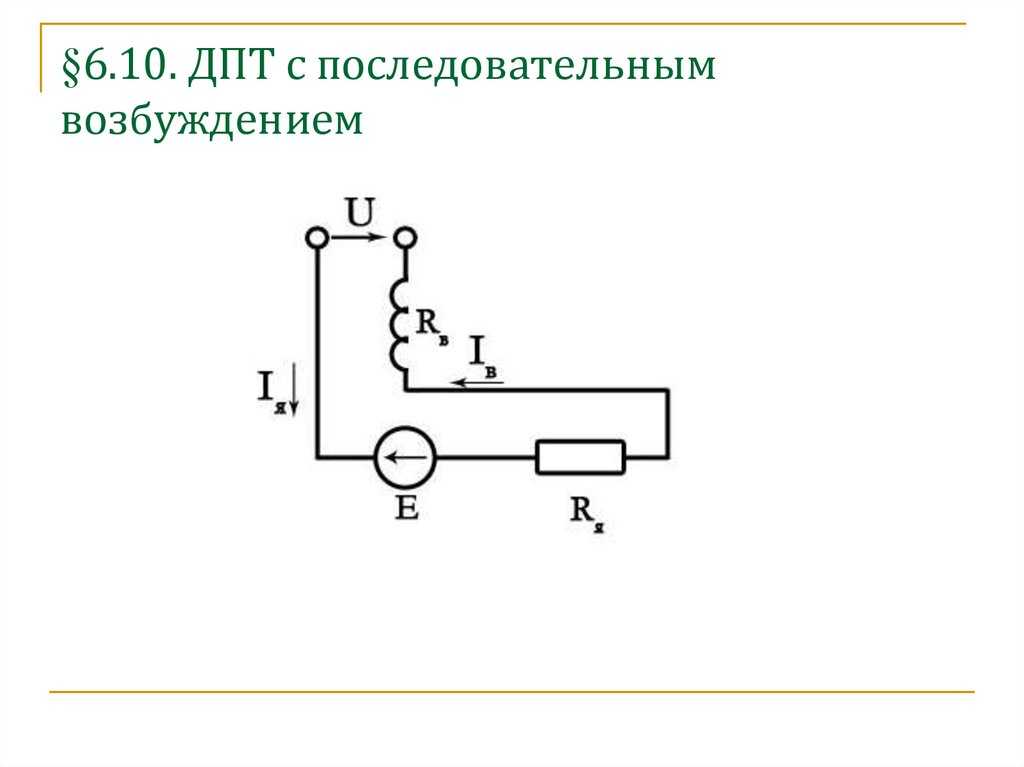 К., Афанасьев А. А. Вентильные электрические машины и регулируемый электропривод: в 2-х кн. М.: Энергоатомиздат, 1997. 498 с.
К., Афанасьев А. А. Вентильные электрические машины и регулируемый электропривод: в 2-х кн. М.: Энергоатомиздат, 1997. 498 с. М.: МГТУ им. А. Н. Косыгина, 2004. 264 с.
М.: МГТУ им. А. Н. Косыгина, 2004. 264 с. ru
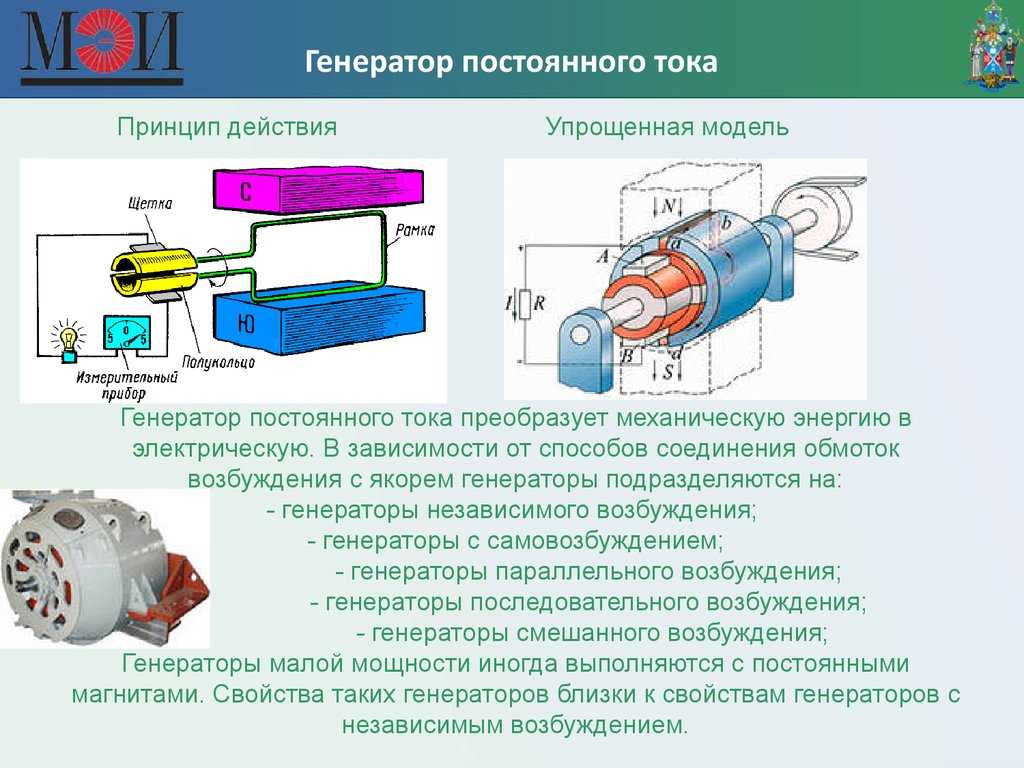
ruЭффективность двигателя постоянного тока и генератора постоянного тока
Хотите создать сайт? Найдите бесплатные темы и плагины WordPress.
В этом руководстве рассматриваются эффективность и потери машин постоянного тока (двигатель и генератор), включая медные, сердечниковые, щеточные, механические (трение и ветер) и паразитные потери.
Потери в машинах постоянного тока (двигатель и генератор) включают потери на трение, аэродинамические и электрические потери. Трение присутствует во всех вращающихся механизмах. Парусность присутствует из-за сопротивления воздуха вращающимся компонентам, а также в вентиляторах, добавленных для обеспечения принудительной циркуляции воздуха в целях охлаждения.
В электрических машинах термин «прочие потери» включает потери в меди, потери в стали, магнитную утечку и другие меньшие факторы. В совокупности потери представляют собой потраченную впустую энергию, которую следует максимально сократить, часто за счет простого хорошего обслуживания.
Потери в машинах постоянного тока
Потери
Потери мощности в меди обусловлены сопротивлением электрических обмоток, а потери мощности в железе обусловлены гистерезисом и вихревыми токами в железном сердечнике якоря. В то время как потери в железе почти постоянны от холостого хода до полной нагрузки, потери в меди значительно варьируются в зависимости от тока нагрузки.
Эти две величины являются основными электрическими потерями в двигателе и суммируются для получения общих потерь электроэнергии. Потери мощности в медных проводниках зависят от квадрата протекающего тока ( P = I 2 R ).
При малых нагрузках малый ток означает минимальные потери в меди. Если ток якоря удвоить, потери в меди возрастут в четыре раза и выделится в четыре раза больше тепла; это тепло должно быть удалено, как правило, за счет циркуляции воздуха, что увеличивает потери в системе.
КПД генератора постоянного тока
В целях анализа обычно предполагается, что все сопротивление якоря сосредоточено в одном компоненте и не распределяется по обмоткам. На рис. 1 показан генератор постоянного тока с параллельным подключением , разделенный на различные воображаемые составные части, а пунктирные линии обозначают фактические компоненты.
На рис. 1 показан генератор постоянного тока с параллельным подключением , разделенный на различные воображаемые составные части, а пунктирные линии обозначают фактические компоненты.
Рисунок 1 Схема замещения шунтового генератора
При расчетном вырабатываемом напряжении генератора в Рисунок 1 равно 200 В, а сопротивление якоря составляет 0,5 Ом, то на каждый ампер тока, подаваемого якорем, приходится внутреннее падение напряжения на 0,5 В из-за сопротивления якоря.
На каждые 2 А тока нагрузки внутренние потери составляют 1 В, а если на клеммах генератора требуется 200 В, то генераторная секция должна генерировать более высокое напряжение в обмотках. То есть для нагрузки 10 А генерируемое напряжение должно быть 205 В, чтобы обеспечить напряжение на клеммах 200 В между точками А и В.
Ток якоря I a также включает ток возбуждения I f , а также ток нагрузки I нагрузка , то есть: равен I A R A ( V = IR ), а генерируемое напряжение V G равна конечному напряжению V Plus равен терминальному напряжению V . 0023 I a R a падение напряжения. То есть для генератора постоянного тока:
0023 I a R a падение напряжения. То есть для генератора постоянного тока:
При последовательной обмотке возбуждения сопротивление поля должно быть добавлено к сопротивлению якоря.
Пример расчета ЭДС генератора постоянного тока 1
Найдите значение ЭДС, создаваемой в генераторе постоянного тока, если напряжение на клеммах 204 В, сопротивление якоря 0,3 Ом и ток якоря 12 А.
Пример расчета напряжения на клеммах генератора постоянного тока 2
Найдите клеммное напряжение генератора составления постоянного тока, приведенные следующими фактами:
Из цепи, показанной в Рисунок 3 :
Рисунок 3 Схема. сопротивление цепи якоря равно:
Общий КПД генератора постоянного тока можно найти, добавив все потери к выходной мощности и сравнив ее с входной мощностью. Рисунок 2 показывает потери, обычно встречающиеся в машине. Хотя кажется, что это значительное число, некоторые из них относительно малы, а эффективность 80 процентов или выше является обычным явлением.
Хотя кажется, что это значительное число, некоторые из них относительно малы, а эффективность 80 процентов или выше является обычным явлением.
Рисунок 2 Потери в генераторе постоянного тока
Пример расчета КПД генератора 3
Потери следующие: трение 250 Вт, железо 125 Вт, поле 200 Вт, потери в якоре в меди 490 Вт, другие паразитные потери 85 Вт.
КПД двигателя постоянного тока
Теоретический подход к определению эффективности двигателя постоянного тока аналогичен методу генератора постоянного тока. Сопротивление якоря рассматривается как одна составляющая, а обмотка — как другая. Это показано на Figure 4 , и легко увидеть сходство с Figure 1 .
Рисунок 4 Эквивалентная схема параллельного двигателя постоянного тока
Возникающая противо-ЭДС зависит от падения напряжения на якоре ( I a R a ) и равна разнице между напряжением питания и падение напряжения. То есть для двигателя постоянного тока:
То есть для двигателя постоянного тока:
Единственным отличием от формулы для генераторов постоянного тока является полярность падения напряжения на якоре ( I a R a ). Это показано на Рисунок 4 со стрелками, указывающими направления приложенного и генерируемого напряжения и показывающими, что они противоположны друг другу. В результате действующее напряжение, вызывающее протекание тока через цепь якоря, меньше приложенного напряжения. То есть:
Общий КПД двигателя постоянного тока можно найти аналогично КПД генератора постоянного тока,
, то есть: потребляемая мощность = выходная мощность + потери .
В то время как на входе генератора была механическая мощность и выходная электрическая мощность, на входе двигателя была электрическая мощность и выходная механическая мощность. Потери показаны в Рисунок 5 .
Рисунок 5 Потери в двигателе постоянного тока
Пример расчета противо-ЭДС двигателя постоянного тока 4
Двигатель постоянного тока с параллельным подключением потребляет 25 А при напряжении 200 В постоянного тока.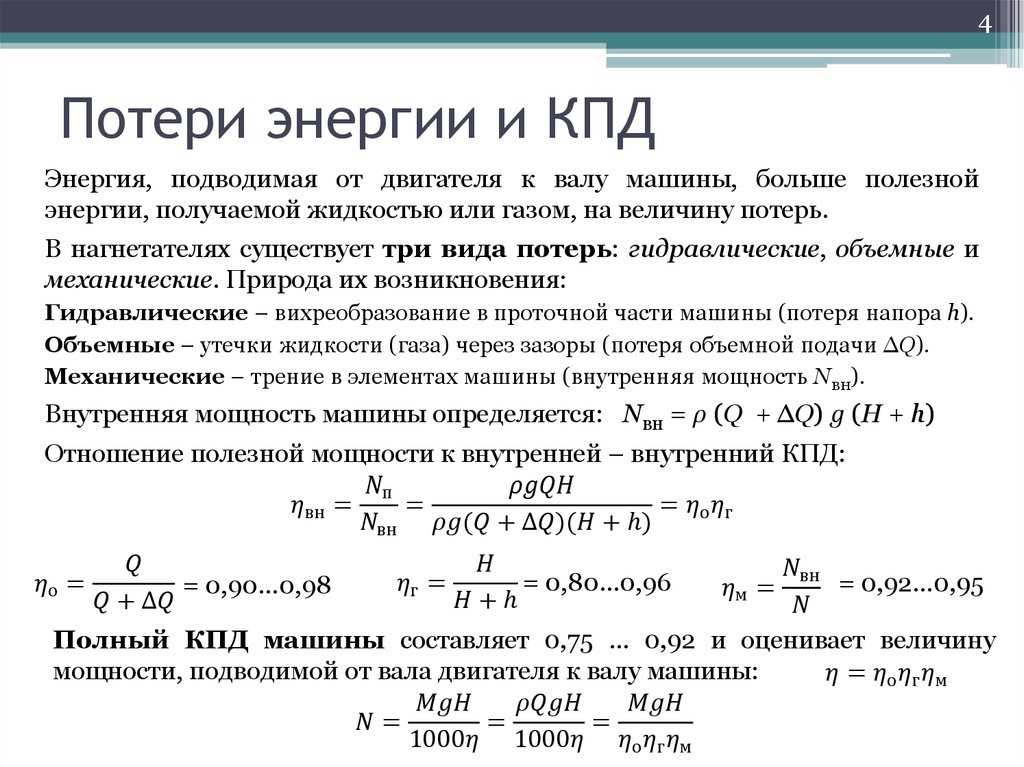 Если поле двигателя имеет ток 1 А и сопротивление якоря 0,25 Ом, найти значение противо-ЭДС. Схема показана на Рисунок 6 .
Если поле двигателя имеет ток 1 А и сопротивление якоря 0,25 Ом, найти значение противо-ЭДС. Схема показана на Рисунок 6 .
Рисунок 6 Схема для примера 4
Пример расчета эффективности двигателя постоянного тока 5
Составной двигатель постоянного тока 250 В с длинным шунтом потребляет ток 82 А при полной нагрузке.
Рассчитайте выходную мощность и КПД, учитывая следующие данные:
- сопротивление якоря = 0,09 Ом
- сопротивление шунтирующего поля = 125 Ом
- последовательное сопротивление возбуждения = 0,04 Ом
- сумма всех остальных потерь = 7260 Вт 9050 Вт
Схема показана на рисунке 7 . Рисунок 7 Схема для примера 5 Вы можете найти новые бесплатные игры и приложения для Android.
Как читать кривые производительности двигателя постоянного тока и мотор-редуктора
Понимание и интерпретация кривых производительности электродвигателя может показаться сложным, но ISL здесь, чтобы помочь! Хотя это может выглядеть как ошеломляющая случайная комбинация пересекающихся линий, на самом деле график является очень эффективным методом иллюстрации производительности и возможностей двигателя или мотор-редуктора. Наша цель в этой заметке по проектированию — облегчить вам понимание и интерпретацию кривых производительности, которые обычно встречаются в технических описаниях двигателей или мотор-редукторов.
Наша цель в этой заметке по проектированию — облегчить вам понимание и интерпретацию кривых производительности, которые обычно встречаются в технических описаниях двигателей или мотор-редукторов.
Магазин мотор-редукторов и мотор-редукторов
Понимание основ
Кривая производительности двигателя / мотор-редуктора содержит пять конкретных параметров; скорость, крутящий момент, потребляемый ток, мощность и эффективность. Общие данные о производительности иллюстрируют оптимальные условия, в которых должен работать двигатель, а также его ограничения. Эту информацию можно использовать, чтобы определить, будет ли двигатель идеальным для вашего приложения или устройства.
Скорость (Н)
Измеренная в оборотах в минуту (об/мин), эта прямая линия с наклоном вниз показывает соотношение между крутящим моментом и скоростью во всем диапазоне мощности (см. синюю линию в примере выше). Поскольку скорость и крутящий момент косвенно пропорциональны друг другу, эта линия будет уменьшаться линейно по мере увеличения крутящего момента до точки остановки, в которой скорость будет равна 0 об/мин. .
.
Скорость и крутящий момент имеют обратную зависимость. Скорость самая высокая, когда двигатель создает наименьший крутящий момент, а когда крутящий момент самый высокий, двигатель едва вращается.
Эффективность (η)
Эффективность представляет собой соотношение между входной и выходной мощностью, выраженное в процентах (%). Эта линия более или менее параболическая с вершиной, расположенной ближе к более низким значениям крутящего момента (см. розовую линию в примере выше). Обычно он достигает пика в начале диапазона крутящего момента, а затем медленно уменьшается по мере того, как двигатель приближается к своему крутящему моменту.
Использование двигателя, близкого к максимальному КПД, обеспечивает оптимальный срок службы двигателя и энергопотребление. Лучше всего использовать двигатель с максимальной эффективностью или близкой к ней. Чем дальше двигатель отходит от максимальной эффективности, тем менее надежной становится его производительность.
Крутящий момент (T)
Крутящий момент, измеряемый в кг-см, фунт-дюйм или Нм, представляет собой величину нагрузки, которую может преодолеть выходной вал двигателя или мотор-редуктора. На кривой производительности двигателя постоянного тока/редукторного двигателя крутящий момент обычно представлен по оси X.
На кривой производительности двигателя постоянного тока/редукторного двигателя крутящий момент обычно представлен по оси X.
Пересечение линии скорости ( N ) и оси X является точкой крутящего момента (T). Здесь двигатель развивает максимальный крутящий момент и больше не может вращаться. Убедитесь, что сила, необходимая от двигателя, намного меньше, чем общий крутящий момент (опрокидывающий момент), в противном случае двигатель не будет работать должным образом и возникнет высокий риск его повреждения.
Ток (I)
Обозначается прямой восходящей линией (см. бирюзовую линию в приведенном выше примере) и отражает потребление тока от холостого хода до состояния остановки. Эта линия показывает прямую зависимость между силой тока и крутящим моментом.
Если ваше приложение требует энергопотребления, рекомендуется использовать двигатель с максимальной эффективностью. Это обеспечивает наиболее сбалансированную производительность двигателя при разумном токе. Во время оценки производительности двигателя учет потребляемого тока позволит вам более точно понять условия работы двигателя под нагрузкой в вашем приложении.
Во время оценки производительности двигателя учет потребляемого тока позволит вам более точно понять условия работы двигателя под нагрузкой в вашем приложении.
Выходная мощность (P)
Возможно, самое простое число на всем графике. Выходная мощность показывает, какую мощность (в ваттах) может обеспечить двигатель (см. зеленую линию в приведенном выше примере).
Мощность представляет собой измерение работы во времени и обычно изображается в виде стандартной параболической формы. Мощность двигателя зависит как от скорости, так и от крутящего момента, мощность низкая, когда скорость высокая, а крутящий момент очень низкий. Верна и обратная ситуация: когда скорость низкая, а крутящий момент высокий, мощность также будет низкой. Это означает, что пик мощности обычно приходится на середину между максимальной скоростью и точкой остановки.
Просмотр базы данных двигателей ISL
Интерпретация кривой производительности
Теперь, когда мы рассмотрели основы, вы можете начать понимать, что обозначают линии и числа. Приведенная ниже кривая производительности является более подробным представлением производительности типичного редукторного двигателя постоянного тока. Мы будем использовать эту кривую в качестве точки отсчета, чтобы помочь объяснить, как правильно определить аспекты общей производительности и другие важные факторы, такие как номинальная производительность.
Приведенная ниже кривая производительности является более подробным представлением производительности типичного редукторного двигателя постоянного тока. Мы будем использовать эту кривую в качестве точки отсчета, чтобы помочь объяснить, как правильно определить аспекты общей производительности и другие важные факторы, такие как номинальная производительность.
Ниже приведены конкретные характеристики, основанные на приведенной выше кривой производительности мотор-редуктора:
| Параметр | Значение | Блок |
| Скорость без нагрузки | 58 | об/мин |
| Ток холостого хода | 0,5 | А |
| Номинальная скорость | 48 | об/мин |
| Номинальный крутящий момент | 2,5 | Н·м |
| Номинальный ток | 2,5 | А |
| Номинальная мощность | 12,8 | Вт |
Макс. Эффективность Эффективность | 43 | % |
| Макс. Мощность | 22,7 | Вт |
| Опрокидывающий крутящий момент | 15 | Н·м |
| Останов тока | 12 | А |
Кривые производительности редукторного двигателя дают вам возможность оценить двигатель на бумаге, чтобы понять, является ли он наиболее оптимальным выбором для вашего приложения. Сравнивая желаемую производительность вашего приложения с графиком, вы теоретически можете протестировать двигатель до того, как будут изготовлены образцы. Как и в случае с любым другим электромеханическим компонентом, вы хотите, чтобы он работал максимально эффективно. Вы можете использовать кривую производительности, чтобы легко определить точку максимальной эффективности двигателя или мотор-редукторов или номинальную производительность.
Номинальная производительность
Чтобы найти номинальную или номинальную рабочую производительность двигателя / мотор-редуктора, первым шагом является определение точки максимальной эффективности (розовая линия). На графике выше пиковая эффективность составляет 43%. Как только вы найдете точку максимальной эффективности, проведите через нее вертикальную линию (см. черную пунктирную линию) от верхней части графика к нижней, чтобы определить все остальные номинальные параметры производительности. Каждый раз, когда ваша вертикальная линия пересекается с другой линией на графике, она указывает каждое из номинальных значений производительности.
На графике выше пиковая эффективность составляет 43%. Как только вы найдете точку максимальной эффективности, проведите через нее вертикальную линию (см. черную пунктирную линию) от верхней части графика к нижней, чтобы определить все остальные номинальные параметры производительности. Каждый раз, когда ваша вертикальная линия пересекается с другой линией на графике, она указывает каждое из номинальных значений производительности.
Используя приведенный выше график, номинальная производительность этого мотор-редуктора будет следующей: 2,5 Нм / 48 об/мин / 43 % / 2,5 А / 12,8 Вт.
* Обратите внимание, что обычно на оси Y имеется несколько шкал параметров.
Обсудить с инженером
Непрерывное и периодическое использование
Электродвигатели имеют два типа использования, которые определяются крутящим моментом, с которым они работают. Эти диапазоны предназначены для отображения общих безопасных рабочих пределов двигателя или мотор-редуктора. Определение вашего общего рабочего цикла является ключевым фактором при определении типа диапазона использования, в котором будет работать двигатель или мотор-редуктор.
Определение вашего общего рабочего цикла является ключевым фактором при определении типа диапазона использования, в котором будет работать двигатель или мотор-редуктор.
Диапазон непрерывного использования
Это происходит в диапазоне от 0 % до 30 % от общего допустимого крутящего момента (момент остановки). Этот диапазон охватывает точку максимального КПД двигателей и может стабильно работать без риска преждевременного выхода из строя. В этом диапазоне термические параметры не являются проблемой, если температура окружающей среды не слишком высока. Это самый безопасный диапазон для работы двигателя.
Диапазон прерывистого использования
Этот диапазон составляет от 30% до 60% от общего допустимого крутящего момента. В этом случае двигатель может выполнять спорадические задачи, но не должен работать постоянно, чтобы поддерживать общее состояние двигателя. Внедрение активного охлаждения может позволить двигателям работать здесь в течение более длительных периодов времени и иметь меньшее время простоя. Имейте в виду, чем дальше вы уходите от точки максимальной эффективности, тем выше будет потребляемый ток, а также увеличиваются шансы преждевременного выхода из строя.
Имейте в виду, чем дальше вы уходите от точки максимальной эффективности, тем выше будет потребляемый ток, а также увеличиваются шансы преждевременного выхода из строя.
Опасная зона
Мы будем ссылаться на эту зону выше 60% допустимого крутящего момента. Настоятельно рекомендуется не эксплуатировать двигатель в этом месте! При таких нагрузках двигатель будет быстро перегреваться, что увеличивает вероятность перегорания обмотки двигателя и/или выхода из строя редуктора, если таковой имеется.
Хотя это полезные приблизительные значения при выборе двигателя или мотор-редуктора, они не являются конкретными правилами. Пожалуйста, используйте эту информацию в качестве ориентира при выборе двигателя. Всегда лучше проконсультироваться с продавцом или поставщиком вашего двигателя, чтобы убедиться, что выбранный вами двигатель является оптимальным выбором для вашего применения и рабочего цикла. Инженер по приложениям ISL Products может помочь со всеми этими аспектами. Свяжитесь с ними сегодня с любыми вопросами!
Заключение
Мы надеемся, что это объяснение помогло вам лучше ознакомиться с кривыми производительности двигателя и мотор-редуктора. Не все продавцы или производители предоставят все данные о двигателе, поэтому, если какой-либо параметр отсутствует, запросите его.
Не все продавцы или производители предоставят все данные о двигателе, поэтому, если какой-либо параметр отсутствует, запросите его.
Как и во всем остальном, понимание этих паспортов производительности — это только одна часть процесса выбора двигателя. Если у вас возникли проблемы с выбором двигателя, просто сообщите об этом нашим инженерам, они всегда готовы помочь! Ознакомьтесь с нашими рекомендациями по проектированию и узнайте, как наши инженеры по применению могут сэкономить вам более 10 часов исследований в процессе выбора двигателя.
ISL Products имеет многолетний опыт предоставления OEM-производителям решений для двигателей постоянного тока и мотор-редукторов для конкретных приложений. Отправьте запрос с помощью нашего быстрого и простого 3-шагового руководства по выбору двигателя, чтобы начать работу уже сегодня.
Как повысить эффективность электродвигателей
Первый промышленный электродвигатель, вероятно, считался прорывом в свое время, хотя было много возможностей для совершенствования. По мере развития технологий производители двигателей разработали более совершенные двигатели, которые потребляют меньше энергии и имеют меньшие затраты. Хотя для производителей вполне естественно использовать новейшие технологии при создании электродвигателей, возможности для дальнейшего совершенствования методов производства сыграли важную роль в повышении эффективности этих двигателей.
По мере развития технологий производители двигателей разработали более совершенные двигатели, которые потребляют меньше энергии и имеют меньшие затраты. Хотя для производителей вполне естественно использовать новейшие технологии при создании электродвигателей, возможности для дальнейшего совершенствования методов производства сыграли важную роль в повышении эффективности этих двигателей.
Рассмотрим следующую статистику:
- В 2015 году мировой рынок электротехники оценивался более чем в 70 миллиардов долларов, и ожидается, что совокупный годовой темп роста (CAGR) составит 4,2 процента в период с 2017 по 2025 год.
- По оценкам, к 2035 году мировое потребление электроэнергии достигнет 35 триллионов киловатт-часов, и почти 28 процентов будут использоваться электродвигателями.
- Девяносто процентов установленных двигателей постоянно работают на полной скорости и используют механические системы для регулирования мощности.
Будущее определенно выглядит многообещающим!
Прежде чем перейти к эффективности электродвигателей, важно больше узнать об обычных двигателях, используемых в промышленности.
Простой двигатель постоянного тока преобразует электрическую энергию постоянного тока в механическую энергию. Обычно он оснащен большим количеством катушек, что делает его эффективным. Тем не менее, это все равно может привести к потере большого количества энергии из-за трения между коллектором и щетками, а также к потере крутящего момента при определенных углах. Кроме того, если двигатель застрянет при попытке поднять тяжелый груз, обмотки ротора могут легко перегреться и расплавиться. Вот почему в ряде промышленных и тяжелых бытовых приборов используются электродвигатели.
Как производители могут экономить электроэнергию с помощью электродвигателей
То, как спроектирован электродвигатель и как он используется, — это два определяющих фактора, которые могут способствовать экономии электроэнергии. Давайте сначала рассмотрим аспект дизайна.
Использование медных обмоток в катушках статора
Что касается проводимости двигателя, всегда лучше использовать медные катушки, а не устаревшие алюминиевые.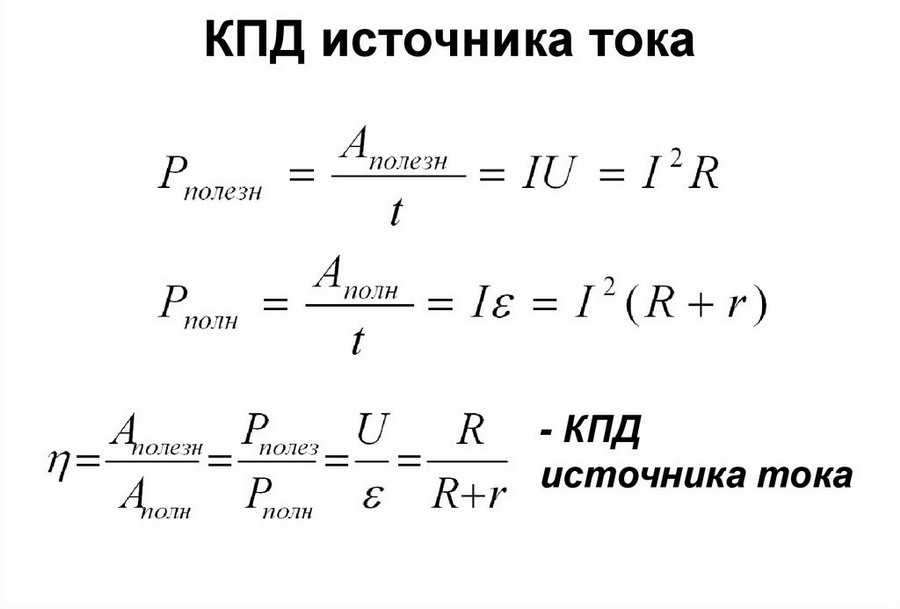 Это связано с тем, что проводимость алюминия ниже, чем у меди. Чтобы не отставать от медных катушек, алюминиевым магнитным проводам может потребоваться большее поперечное сечение, чтобы они могли обеспечить такой же уровень проводимости. Обмотки, намотанные алюминиевым проводом, могут иметь больший объем по сравнению с двигателем с медным проводом того же размера.
Это связано с тем, что проводимость алюминия ниже, чем у меди. Чтобы не отставать от медных катушек, алюминиевым магнитным проводам может потребоваться большее поперечное сечение, чтобы они могли обеспечить такой же уровень проводимости. Обмотки, намотанные алюминиевым проводом, могут иметь больший объем по сравнению с двигателем с медным проводом того же размера.
Если вы все еще используете алюминиевые обмотки, убедитесь, что концы алюминиевого магнитного провода правильно подключены. Алюминий окисляется намного быстрее, чем другие металлы, и если порошковый алюминий подвергается воздействию воздуха, он полностью окисляется всего за несколько дней и оставляет после себя мелкий белый порошок.
Чтобы сделать правильное соединение, обеспечивающее хорошую проводимость, необходимо проколоть оксидный слой алюминиевого магнитного провода, чтобы предотвратить дальнейший контакт алюминия с воздухом.
Конечно, для достижения КПД двигателя недостаточно просто выбрать между алюминиевой и медной обмотками. Несколько производителей разработали обжимные соединители с прокалыванием под высоким давлением, чтобы повысить эффективность. Это было сделано для того, чтобы алюминиевые обмотки не отставали от своих медных аналогов. Хотя двигатели с алюминиевыми обмотками могут соответствовать мощности медных, это требует времени и денег. Алюминий также требует большего количества витков и проволоки большего диаметра, что не всегда может быть экономичным.
Несколько производителей разработали обжимные соединители с прокалыванием под высоким давлением, чтобы повысить эффективность. Это было сделано для того, чтобы алюминиевые обмотки не отставали от своих медных аналогов. Хотя двигатели с алюминиевыми обмотками могут соответствовать мощности медных, это требует времени и денег. Алюминий также требует большего количества витков и проволоки большего диаметра, что не всегда может быть экономичным.
Если двигатель должен работать время от времени или в течение короткого времени, и когда эффективность и объем не имеют существенного значения, использование алюминиевых магнитных проводов может иметь смысл. В противном случае всегда следует отдавать предпочтение медным обмоткам.
Использование медных стержней в роторе
Когда дело доходит до роторов, медь также предлагает преимущество эффективности. Медные роторы предпочтительны для энергосберегающих отраслей промышленности в развитых странах и в развивающихся странах, где электричество часто не хватает и стоит дорого. Медные роторы являются лучшим выбором по сравнению с алюминиевыми с точки зрения качества двигателя, надежности, стоимости, эффективности и срока службы.
Медные роторы являются лучшим выбором по сравнению с алюминиевыми с точки зрения качества двигателя, надежности, стоимости, эффективности и срока службы.
Прецизионная обработка движущихся частей
Механическая обработка влечет за собой удаление материала из компартмента в вещество с высокой переносимостью. Прецизионное оборудование необходимо для достижения максимальной точности при наименьшей измеримой степени. Будь то резка металла или добыча угля, прецизионное оборудование может обеспечить точность, необходимую для производства материалов в желаемых количествах. Движущиеся части машины требуют своевременного обслуживания для максимальной производительности и эффективности. Техническое обслуживание должно выполняться только специалистами, и требуется проверка всех деталей.
Использование высококачественной стали для роторов и статоров
Высокотехнологичная электротехническая сталь необходима для производства экономичных статоров и роторов, используемых в различных электродвигателях. Этот тип стали обеспечивает высокую магнитную проницаемость и низкие потери мощности для первоклассной производительности. Однако потери мощности в электротехнической стали все же могут иметь место. Вихревые токи, также называемые токами Фуко, возникают при изменении магнитного поля. Прокатка стали до более тонкой толщины регулирует эти вихревые токи и снижает потери тока. Это особенно верно для частот приложений, выходящих за стандартные 50 или 60 герц.
Этот тип стали обеспечивает высокую магнитную проницаемость и низкие потери мощности для первоклассной производительности. Однако потери мощности в электротехнической стали все же могут иметь место. Вихревые токи, также называемые токами Фуко, возникают при изменении магнитного поля. Прокатка стали до более тонкой толщины регулирует эти вихревые токи и снижает потери тока. Это особенно верно для частот приложений, выходящих за стандартные 50 или 60 герц.
Держите ротор и статор как можно ближе
Благодаря прецизионному производству производители могут располагать ротор и статор как можно ближе друг к другу, не касаясь друг друга. Когда скорость вращения достигает нескольких тысяч оборотов в минуту, электротехническая сталь в роторе может испытывать огромные нагрузки. Высокие нагрузки особенно ощущаются в областях вблизи магнитных пазов, где узкое оборудование удерживает магниты на месте.
В асинхронных двигателях передача энергии происходит через воздушный зазор между статором и двигателем. Воздушный зазор необходим для минимизации сопротивления. Небольшой воздушный зазор приведет к меньшим потерям энергии и более высокому КПД. Общая потокосцепление между статором и ротором расширяется по мере уменьшения воздушного зазора. Более высокая потокосцепление приводит к снижению потерь энергии и повышению эффективности. Меньший зазор также помогает избежать шума.
Воздушный зазор необходим для минимизации сопротивления. Небольшой воздушный зазор приведет к меньшим потерям энергии и более высокому КПД. Общая потокосцепление между статором и ротором расширяется по мере уменьшения воздушного зазора. Более высокая потокосцепление приводит к снижению потерь энергии и повышению эффективности. Меньший зазор также помогает избежать шума.
Больше катушек делает двигатели более эффективными
Провода в фазных катушках двигателей малой мощности тоньше. Однако число витков катушки должно быть большим, чтобы увеличить магнитодвижущую силу или плотность тока. Сопротивление фазных обмоток и плотность потерь мощности также выше, чем в двигателях большой мощности. Следовательно, маломощные двигатели с высокими скоростями потребуют большей магнитодвижущей силы. Это означает, что потребуется больше катушек, а также большее количество витков с тонким проводом, обеспечивающим более высокую плотность тока.
Использование приводов с регулируемой скоростью
Приводы с регулируемой скоростью (VSD) или приводы с регулируемой скоростью — это тяжелые промышленные электродвигатели. Их скорость можно регулировать с помощью внешнего контроллера. Эти приводы используются в управлении технологическими процессами, поскольку они помогают экономить энергию на предприятиях, использующих многочисленные электродвигатели.
Их скорость можно регулировать с помощью внешнего контроллера. Эти приводы используются в управлении технологическими процессами, поскольку они помогают экономить энергию на предприятиях, использующих многочисленные электродвигатели.
Преобразователи частоты обычно используются в качестве энергосберегающих насосов и вентиляторов, поскольку они улучшают технологические процессы, особенно там, где необходимо управление потоком. Они также обеспечивают возможность плавного пуска, снижающую электрические напряжения и провалы напряжения в сети, которые обычно возникают при пуске электродвигателей под напряжением, особенно при работе с высокоинерционными нагрузками.
Как пользователи электродвигателей могут обеспечить эффективность
Как упоминалось ранее, то, как электродвигатели используются производителями, отраслями промышленности и домовладельцами, будет определять их эффективность. Ниже приведены некоторые конкретные шаги, которые пользователи могут предпринять для обеспечения эффективности и долговечности двигателя:
Использование интеллектуальных двигателей с соответствующим пускателем/контроллером двигателя
Несмотря на то, что интеллектуальные двигатели широко используются и доступны, очень важно выбрать наилучший вариант, чтобы свести к минимуму время простоя, повысить эффективность и снизить затраты. Промышленные инженеры знают, как бремя, которое потребление электроэнергии двигателями может отразиться на их операционном бюджете. Чтобы смягчить это, они часто используют технологии управления двигателями, которые используют только необходимое количество энергии для запуска двигателей, отображения диагностических данных и сокращения времени простоя. По мере того, как пускатели двигателей получают признание, технология пускателей двигателей также приобретает все большее значение.
Промышленные инженеры знают, как бремя, которое потребление электроэнергии двигателями может отразиться на их операционном бюджете. Чтобы смягчить это, они часто используют технологии управления двигателями, которые используют только необходимое количество энергии для запуска двигателей, отображения диагностических данных и сокращения времени простоя. По мере того, как пускатели двигателей получают признание, технология пускателей двигателей также приобретает все большее значение.
Ниже приведены несколько важных вопросов, которые следует рассмотреть перед принятием решения о потенциальном применении электродвигателей:
Будет ли приложение требовать управления скоростью, даже если двигатель движется с определенной скоростью?
Требования к контролю скорости должны быть определены как можно раньше. Некоторые устройства плавного пуска имеют ограниченное управление малой скоростью между пуском и остановом. Важно помнить, что рабочая скорость двигателя не может быть изменена, поскольку устройство плавного пуска регулирует только напряжение двигателя, а не частоту.
Нужно ли приложению определенное время запуска и остановки?
Обычно время пуска и останова устройств плавного пуска зависит от нагрузки. Внутренние алгоритмы регулируют напряжение на основе предварительно запрограммированного времени, чтобы увеличить ток и крутящий момент для запуска двигателя и/или уменьшить их для его остановки. Если нагрузка мала, запуск двигателя может занять меньше времени, чем запрограммированное значение. В современных устройствах плавного пуска используются усовершенствованные алгоритмы, обеспечивающие более точное и менее зависящее от нагрузки время пуска и останова.
Потребуется ли приложению полный крутящий момент при нулевой скорости?
ЧРП могут лучше всего работать с приложениями, требующими полного крутящего момента при нулевой скорости. Они могут создавать номинальный крутящий момент двигателя от нуля до номинальной скорости и даже обеспечивать полный крутящий момент при нулевой скорости. Устройства плавного пуска, с другой стороны, обычно работают на частоте от 50 до 60 Гц, и полный крутящий момент может быть достигнут только при полном напряжении. Начальный крутящий момент (доступный при нулевой скорости) обычно находится в диапазоне от нуля до 75 процентов и может быть запрограммирован.
Устройства плавного пуска, с другой стороны, обычно работают на частоте от 50 до 60 Гц, и полный крутящий момент может быть достигнут только при полном напряжении. Начальный крутящий момент (доступный при нулевой скорости) обычно находится в диапазоне от нуля до 75 процентов и может быть запрограммирован.
Требуется ли приложению постоянный крутящий момент?
Устройства плавного пуска изменяют напряжение для управления током и крутящим моментом. Во время пуска ток изменяется в зависимости от напряжения, а крутящий момент двигателя зависит от квадрата приложенного напряжения. Крутящий момент может не оставаться постоянным при различных приложенных напряжениях, и это условие может усложняться при изменении нагрузки.
Некоторые устройства плавного пуска работают по алгоритмам управления крутящим моментом, но это не обязательно относится к постоянному крутящему моменту. Однако во время ускорения частотно-регулируемые приводы используют разные частоты двигателя при изменении напряжения. Режим управления частотно-регулируемым приводом выражается в постоянных вольтах на герц и создает постоянный крутящий момент.
Режим управления частотно-регулируемым приводом выражается в постоянных вольтах на герц и создает постоянный крутящий момент.
Каковы стоимость, размер и проблемы с температурой?
При силе тока менее 40 ампер устройства плавного пуска могут предложить небольшую экономическую выгоду по сравнению с частотно-регулируемыми приводами. По мере увеличения силы тока и мощности стоимость частотно-регулируемых приводов растет быстрее, чем стоимость устройств плавного пуска, и может достигать экстремальных уровней при высоких токах.
Когда дело доходит до размера, устройства плавного пуска имеют преимущество перед частотно-регулируемыми приводами при любой силе тока благодаря своей конструкции. По мере увеличения тока и мощности разница может увеличиваться. Когда устройства плавного пуска объединены с внутренним или внешним электромеханическим байпасом, они еще более эффективны и могут выделять меньше тепла. Это связано с тем, что устройства плавного пуска имеют меньше активных компонентов в цепи в режимах пуска, работы и останова.
Что нужно учитывать при установке и гармониках?
Проблемы, связанные с установкой, можно классифицировать по стоимости, размеру, температуре и качеству электроэнергии. Установки с плавным пуском требуют меньших размеров и меньших затрат, поэтому они не вызывают особого беспокойства.
Кроме того, гармоники устройств плавного пуска меньше, чем у преобразователей частоты. Длинные кабели для частотно-регулируемых приводов требуют большего внимания, чем для устройств плавного пуска. Кроме того, для устройств плавного пуска могут не потребоваться специальные типы проводов. Электромагнитная совместимость также может не учитываться.
Прекратите использование двигателей, если они не нужны
Как бы просто это ни звучало, самый эффективный способ экономии энергии — выключать двигатель, когда он не используется. Чаще всего пользователи не решаются выключать двигатель, потому что считают, что его повторный запуск приведет к значительному износу. Один из способов смягчить это — использовать устройства плавного пуска, которые могут уменьшить износ. Правильно установленное и правильно подобранное устройство плавного пуска также может снизить нагрузку на механические и электрические системы.
Один из способов смягчить это — использовать устройства плавного пуска, которые могут уменьшить износ. Правильно установленное и правильно подобранное устройство плавного пуска также может снизить нагрузку на механические и электрические системы.
Снижение износа
Уменьшение износа двигателя является одной из основных задач пользователей. При запуске электродвигателя происходит большой износ, так как высокие начальные токи и силы оказывают давление на механические и электрические системы. Хотя это может быть вредным, вредные последствия можно контролировать с помощью устройств плавного пуска. Вы также можете использовать VSD, но они могут быть дорогостоящими и менее эффективными.
Использование высокоэффективных двигателей
Эффективность двигателя может быть получена из двух факторов: размера двигателя и качества его эффективности. В частности, для небольших двигателей размер является важным фактором, влияющим на эффективность. Для более крупных двигателей важнее классы эффективности.
Для более крупных двигателей важнее классы эффективности.
Энергоэффективные двигатели потребляют меньше электроэнергии, не так легко нагреваются и служат дольше. Эти типы двигателей отличаются улучшенной конструкцией, что приводит к меньшим потерям тепла и меньшему уровню шума. Использование высококачественных материалов, более жесткие допуски и улучшенные технологии производства также помогают снизить потери и повысить эффективность.
Чтобы оценить преимущества высокоэффективных двигателей, вы должны сначала определить «эффективность» для электродвигателя. Это можно определить по отношению механической мощности, подаваемой двигателем (выходная), к электрической мощности, подаваемой на двигатель (входная). Таким образом, КПД = (выходная механическая мощность/вводимая электрическая мощность) x 100 процентов.
Таким образом, если двигатель имеет КПД 80 %, он может преобразовать 80 % электрической энергии в механическую. Остальные 20 процентов электроэнергии теряются в виде тепла.
Покупка двигателя подходящего размера
Двигатели, как правило, наиболее эффективны при нагрузке от 60 до 100 процентов от их полной номинальной нагрузки и наиболее неэффективны при нагрузке ниже 50 процентов. Это означает, что простое приобретение двигателя правильного размера может значительно повысить эффективность.
Как правило, двигатели увеличенного размера работают при нагрузке ниже 50 процентов от их номинальной нагрузки, что делает их не только неэффективными, но и более дорогими, чем двигатели нужного размера. Более того, они также могут снизить подачу электроэнергии на машину, что увеличивает нагрузку на электрическую систему.
Заключительные мысли
Поскольку «энергоэффективность» становится современным лозунгом, важно, чтобы эта концепция была интегрирована в повседневные бытовые и промышленные приложения. Энергоэффективные двигатели могут предложить множество преимуществ. При правильной установке они могут работать с меньшим нагревом, обеспечивать более высокие стандарты обслуживания, служить дольше, обеспечивать лучшую изоляцию и издавать меньше шума и вибрации.