Содержание
Arduino и двигатели||Arduino-diy.com
Одно из самых интересных в хобби-электронике – это использование двигателей для «оживления» ваших проектов.
Однако добавление мотора в ваш проект может оказаться непростой задачей, особенно, если вы до этого с приводами не работали.
Данная статья даст вам понимание принципов работы двигателей различных типов и пояснит многие необходимые нюансы и их особенности.
Принцип работы двигателей
Перед тем как разбираться, как именно моторы работаю, давайте сосредоточимся на том, для чего они используются. Моторы используют электромагнитные силы для обеспечения движения, преобразования электроэнергии в механическую.
Магнитные поля создают силу, которая может перемещать объекты. Каждый магнит имеет магнитное поле с северным и южным полюсом. Если вы попробуете приблизить два северных полюса двух магнитов, они будут отталкиваться. То же самое произойдет, если вы попытаетесь приблизить два южных полюса. Если полюса одинаковые, они будут отталкиваться друг от друга. Если же вы приблизите северный полюс одного с южному полюсу другого магнита, они притянутся с определенным усилием. То есть, противоположные полюса притягиваются друг к другу.
Если же вы приблизите северный полюс одного с южному полюсу другого магнита, они притянутся с определенным усилием. То есть, противоположные полюса притягиваются друг к другу.
Электродвигатель использует свойства магнитов отталкиваться и притягиваться для генерации движения. В обычном электродвигателе два магнита: постоянный и переменный. Переменный магнит называется электромагнитом. Электромагнит создается с помощью пропускания электрического тока через проводник. Постоянный магнит постоянно имеет магнитное поле (северный и южный полюса), а электромагнит генерирует магнитное поле только, когда через него пропускают электрический ток. Сила магнитного поля электромагнита может быть увеличена с помощью повышения тока, проходящего через проводник или методом формирования нескольких обмоток проводника.
В электродвигателе электромагнит устанавливается на ось таким образом, что он может свободно вращаться внутри магнитного поля постоянного магнита. В момент, когда через проводник проходит электрический ток, переменное магнитное поле взаимодействует со статическим магнитным полем магнита, возникают силы отталкивания и притяжения.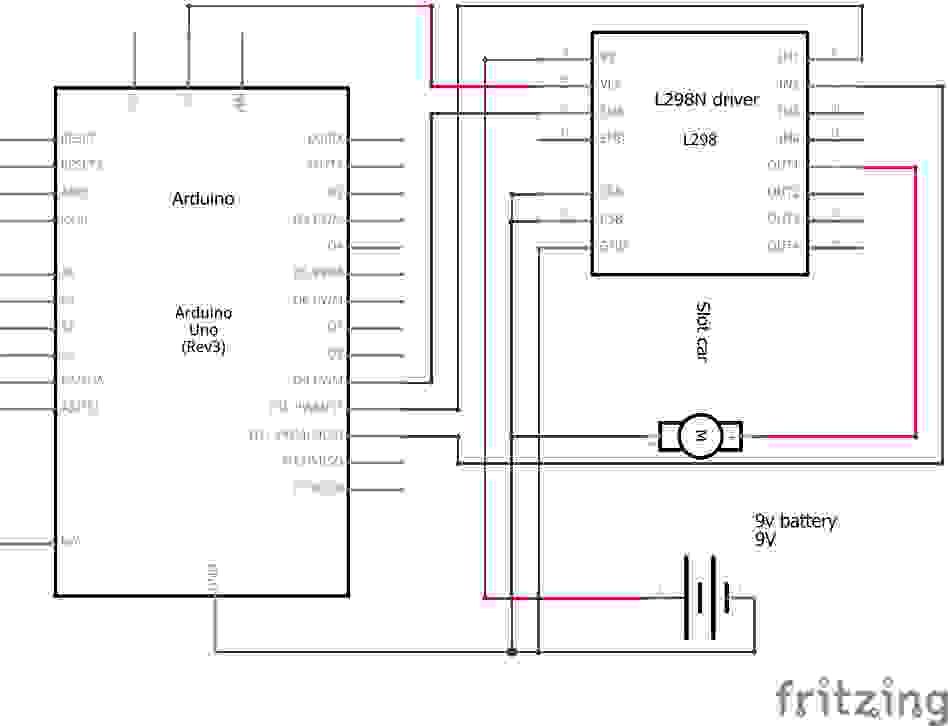 Это заставляет электромагнит вращаться, возникает движение.
Это заставляет электромагнит вращаться, возникает движение.
Основные узлы электродвигателя:
— Постоянный магнит (магниты), в случае, когда он установлен неподвижно, называется статором;
— внутри статора есть катушка, которая установлена на оси и вращается, называется ротором.
Двигатели постоянного тока
Двигатели постоянного тока (DC motor) во многом являются самыми простыми электродвигателями. Большинство «щеточных» двигателей работают одинаково. Есть ротор и статор. Есть магниты на статоре и катушка на роторе с магнитным полем, которое генерируется с помощью подачи на нее силы тока. Есть щетки внутри мотора, которые заставляют двигаться ротор.
При использовании источника постоянного тока, для управления подобным двигателем практически ничего не надо. Скорость его вращения зависит от силы тока, которая поступает на катушки от источника питания к коммутатору.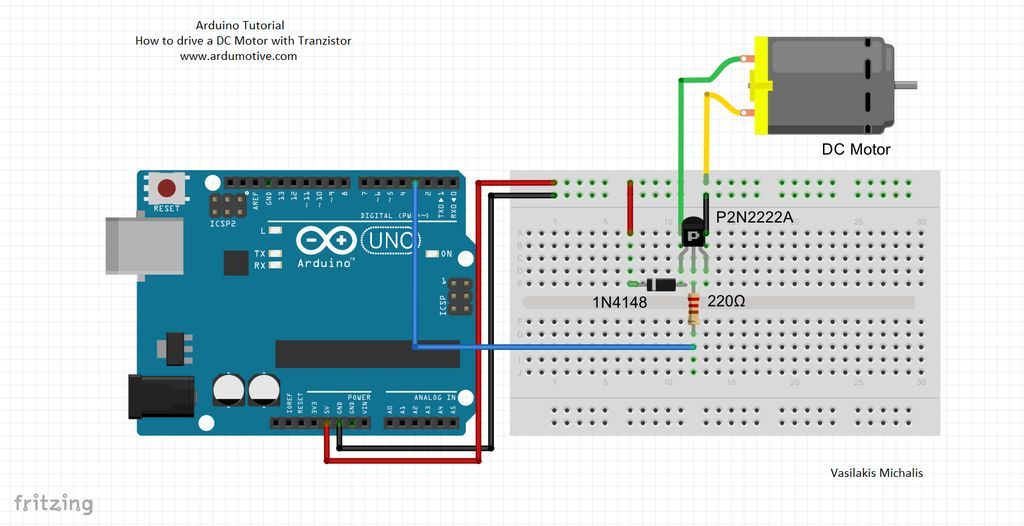
Для вращения оси двигателя в противоположном направлении, достаточно подключить контакты от источника питания к двигателю наоборот.
Шаговые двигатели
Как и двигатели постоянного тока, шаговые двигатели состоят из ротора и статора. Но, в отличие от других двигателей, ротор шагового двигателя представляет из себя постоянный магнит, который вращается внутри полей, создаваемых электромагнитами. Статор состоит из нескольких катушек, которые расположены в корпусе мотора. Когда ток проходит через катушки, подвижный вал двигателя (который является, по сути, постоянным магнитом) располагается в соответствии с генерируемым электромагнитной катушкой полем. Когда катушки заряжаются в определенной последовательности, вал двигателя выбирает новые положения и, соответственно, начинает вращаться.
Ротор приводится в движение последовательной подачей напряжения на катушки. Шаговый двигатель имеет возможность проворачивать ротор на определенный шаг в зависимости от разрешения импульса.
Шаговые двигатели являются отличным выбором для проектов на Arduino (и не только) по нескольким причинам. Они стоят относительно недорого, у них маленькая погрешность, следовательно – это идеальный выбор для управления с разомкнутой системой управления (без дополнительных датчиков положения рабочего органа). Шаговые двигатели будут обеспечивать заданное положение ротора исключительно в зависимости от поданной силы тока.
Эти двигатели предназначены для вращения в одном и противоположном направлении. Если вы подключите источник питания к контактам шагового двигателя, вал начнет вращаться. Если вы подключите проводники наоборот, он будет вращаться в противоположном направлении. Правда, стоит учесть, что в некоторых шаговых двигателях вращение в противоположную сторону невозможно. Перед его запуском, уточняйте этот момент.
Серводвигатели
Обычные серводвигатели для моделистов используются для поворота и удерживания определенной позиции в диапазоне от 0 до 180 градусов. Благодаря этому они находят широкое применение в робототехнике, приводах позиционирования. В производстве серводвигатели используются в модулях рулевого управления автомобилями, лодками, в механизмах фокусировки современных видеокамер.
Благодаря этому они находят широкое применение в робототехнике, приводах позиционирования. В производстве серводвигатели используются в модулях рулевого управления автомобилями, лодками, в механизмах фокусировки современных видеокамер.
В большинстве случаем серводвигатели имеют три провода: питание, земля и сигнал. Обычно провод питания красного цвета, земля – черного или коричневого. Сигнал – желтый, оранжевый или белый.
В серводвигателях, которые, например, используются в системах управления радиоуправляемых машин, электродвигатель подключен к потенциометру. Стандартный приемник/передатчик посылает ШИМ-сигналы на серву. Электроника (небольшая плата-контроллер) внутри серводвигателя, переводит ширину импульса в положение. Когда на серву поступает сигнал к повороту, питание будет подаваться на мотор до тех пор, пока потенциометр не достигнет положения, которое будет соответствовать заданному предварительно через приемник/передатчик.
Сигнал управления является цифровым ШИМ сигналом с частотой 50 Гц.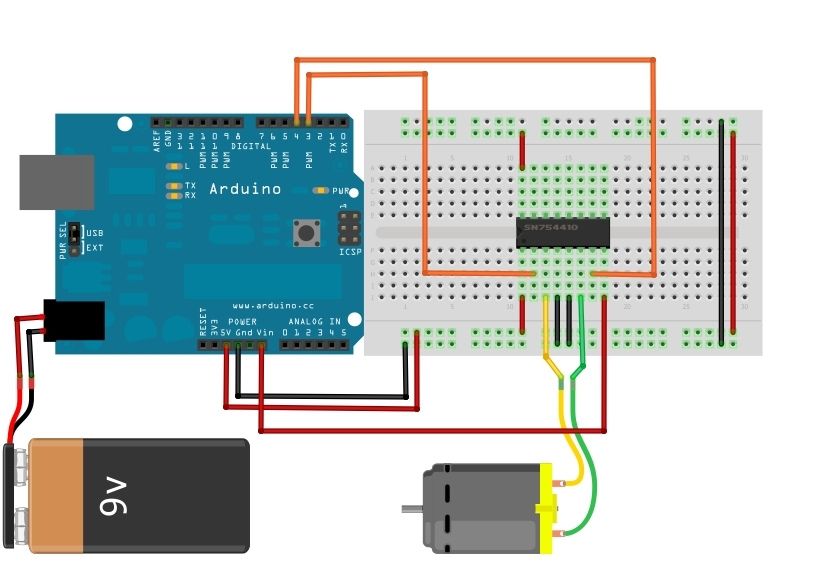 Каждые 20 миллисекунд подается цифровой импульс управления. Продолжительность (ширина) импульса находится в диапазоне от 1.0 миллисекунды до 2.0 миллисекунд. 1.5 – середина диапазона. Большая ширина импульса может использоваться для дополнительного хода, который выходит за нормальный рабочий диапазон. ШИМ (широтно-импульсная модуляция) сигнал иногда называют ШПМ (широтно-позиционная модуляция), хотя это не корректно.
Каждые 20 миллисекунд подается цифровой импульс управления. Продолжительность (ширина) импульса находится в диапазоне от 1.0 миллисекунды до 2.0 миллисекунд. 1.5 – середина диапазона. Большая ширина импульса может использоваться для дополнительного хода, который выходит за нормальный рабочий диапазон. ШИМ (широтно-импульсная модуляция) сигнал иногда называют ШПМ (широтно-позиционная модуляция), хотя это не корректно.
Импульс шириной 1.5 миллисекунды обычно устанавливает серводвигатель в «нейтральное» положение или 90 градусов. Импульс шириной 1.25 миллисекунд может установить его в 0 градусов, а импульс 1.75 миллисекунды в 180 градусов. Физические ограничения и время для различных серводвигателей могут отличаться, но его нейтральное положение всегда соответствует 1.5 миллисекундам.
Вибрационные двигатели
Вибрационные двигатели часто используются в мобильных устройствах для регистрации наличия движения.
Вибрационные моторы по конструктивному исполнению похожи на большинство шаговых двигателей и двигателей постоянного тока.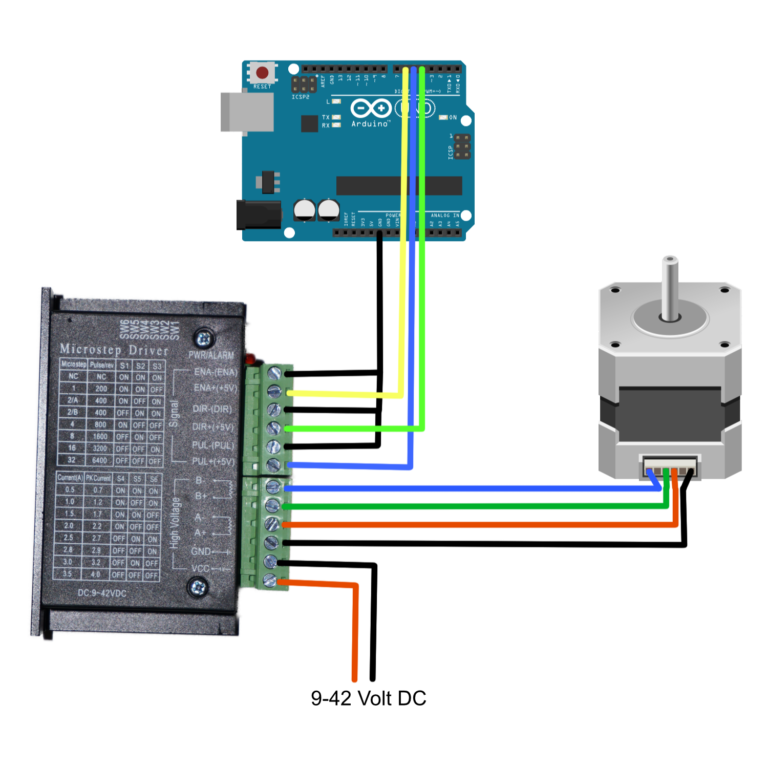 Отличием является то, что на конце ротора установлен эксцентрик. При движении ротора, эксцентрик заставляет механизм внутри корпуса двигателя вибрировать.
Отличием является то, что на конце ротора установлен эксцентрик. При движении ротора, эксцентрик заставляет механизм внутри корпуса двигателя вибрировать.
Интенсивность вибрации зависит как от размеров двигателя, так и от размеров эксцентрика.
На видео сверху показан мотор, установленный на металлической основе. Обратите внимание, как лист металла совершает волновые движения под действием вибрации вибрационного мотора.
Как выбрать двигатель для проекта
Выбор типа двигателя для вашего проекта зависит от того, что именно вы собираетесь автоматизировать. Если вы хотите установить камеру и обеспесить ее поворот влево-вправо, идеальным выбором будет серводвигатель. Если вы передаете движение на зубчатые колеса с необходимостью обеспечения реверса, лучшим выбором станет шаговый двигатель.
Естественно, отличным выбором для управления вашим двигателем станет плата Arduino или ее клоны. Отличительной позитивной чертой данных плат является то, что их пины могут быть использованы для комплексных проектов, включая дополнительное подключение к двигателям датчиков, систем контроля и т.п.
Отличительной позитивной чертой данных плат является то, что их пины могут быть использованы для комплексных проектов, включая дополнительное подключение к двигателям датчиков, систем контроля и т.п.
Дальше в статье приведена информация о том, как можно быстро «оживить» выбранный вами предварительно двигатель с использованием платы Arduino.
Использование шагового двигателя с Arduino
Стоит отметить, что «оживлять» свои проекты с помощью плат Arduino и оболочки Arduino IDE для их программирования очень легко из-за наличия большого количества уже готовых библиотек. Подключение шагового двигателя к плате Arduino отличается от подключения двигателя постоянного тока. Существует специальная библиотека и функция, встроенные в Arduino IDE. Более детально об этом вы можете почитать здесь.
После открытия Arduino IDE, перейдите в меню во вкладку
File -> Examples -> Stepper -> stepper_oneRevolution
Данная программа дает возможность управлять уни- или биполярным шаговым двигателем после его подключения к цифровым пинам 8-11 на плате Arduino. После загрузки скетча на плату Arduino, шаговый двигатель должен сделать один оборот по часовой стрелке, после этого – один поворот против часовой стрелки.
После загрузки скетча на плату Arduino, шаговый двигатель должен сделать один оборот по часовой стрелке, после этого – один поворот против часовой стрелки.
Данный пример – отличное начало. Естественно, вы можете вносить свои коррективы в программу, подстраивая ее под свои задачи. Задержка указывается в миллисекундах, так что если вы не хотите выдерживать паузу между оборотами, можете выставить задержку delay(10). Или, для того, чтобы замедлить вращение можете изменить stepsPerRevolution и присвоить ему значение, например, (1000000).
Изменения скетча зависят от того, что именно вы хотите реализовать. Для лучшего понимания того, как именно происходит обмен данными между шаговым двигателем и платой Arduino, советую поэкспериментировать с другими примерами.
Использование двигателя постоянного тока / вибрационного двигателя с Arduino
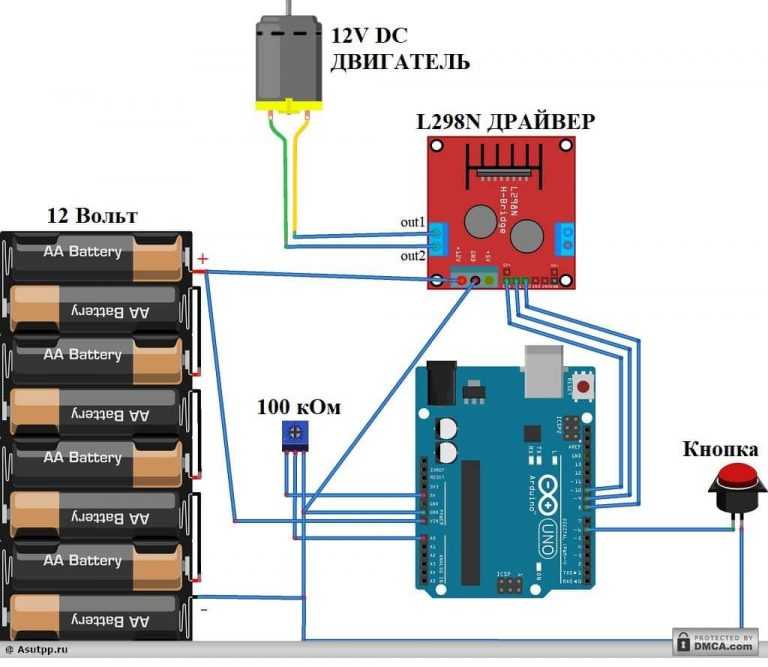
В некоторых проектах нет смысла использовать микропроцессоры вроде Arduino.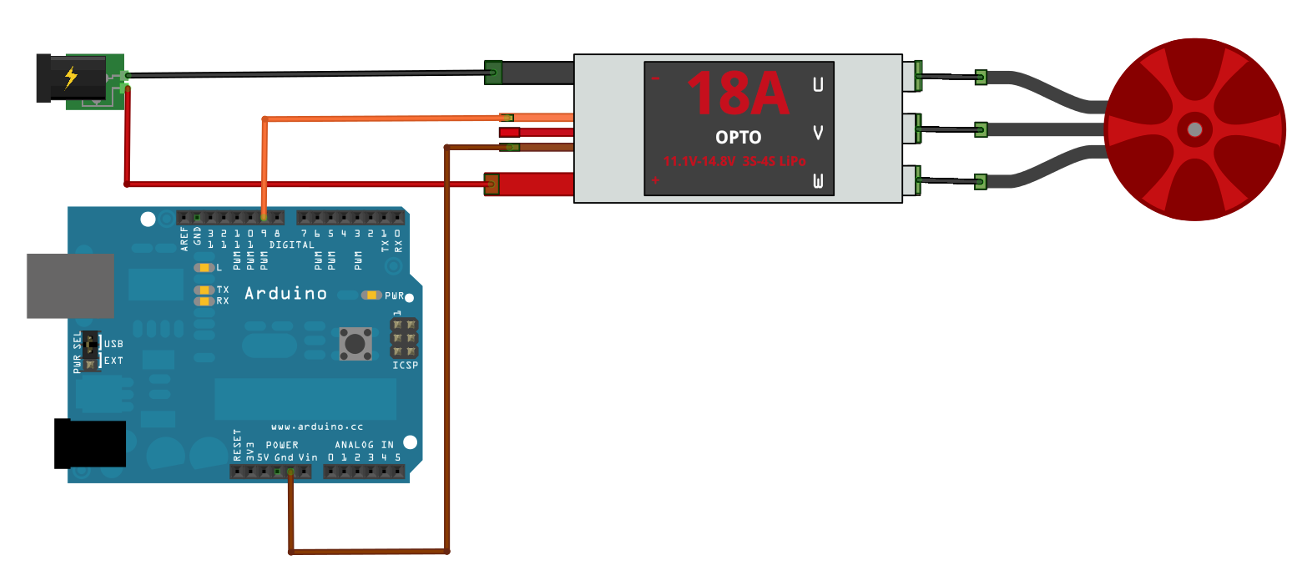 Например, если вы делаете игрушку для ребенка (или взрослого) и хотите установить в нее вибрационный двигатель, гораздо эффективнее и лучше использовать простую кнопку для запуска двигателя.
Например, если вы делаете игрушку для ребенка (или взрослого) и хотите установить в нее вибрационный двигатель, гораздо эффективнее и лучше использовать простую кнопку для запуска двигателя.
В таком случае, мотор будет подключатся непосредственно к вашему источнику питания через выключатель, который соединен с позитивным коннектором вашего двигателя.
Использование серводвигателя с Arduino
Так же как и шаговые двигатели, для работы серводвигателей в оболочке Arduino IDE есть встроенная библиотека.
После открытия Arduino IDE, перейдите в меню во вкладку
File -> Examples -> Servo -> Knob
Данная программа обеспечивает управление серводвигателем, который подключен к 9-му ШИМ пину платы Arduino. Потенциометр, в свою очередь, подключен к аналоговому пину 0 и обеспечивает управление положением серводвигателя, посылая напряжение, пропорциональное сопротивлению на пин А0 платы Arduino. Скетч, который «залит» в плату Arduino, интерпретирует сигнал в импульсы, которые посылаются на серводвигатель.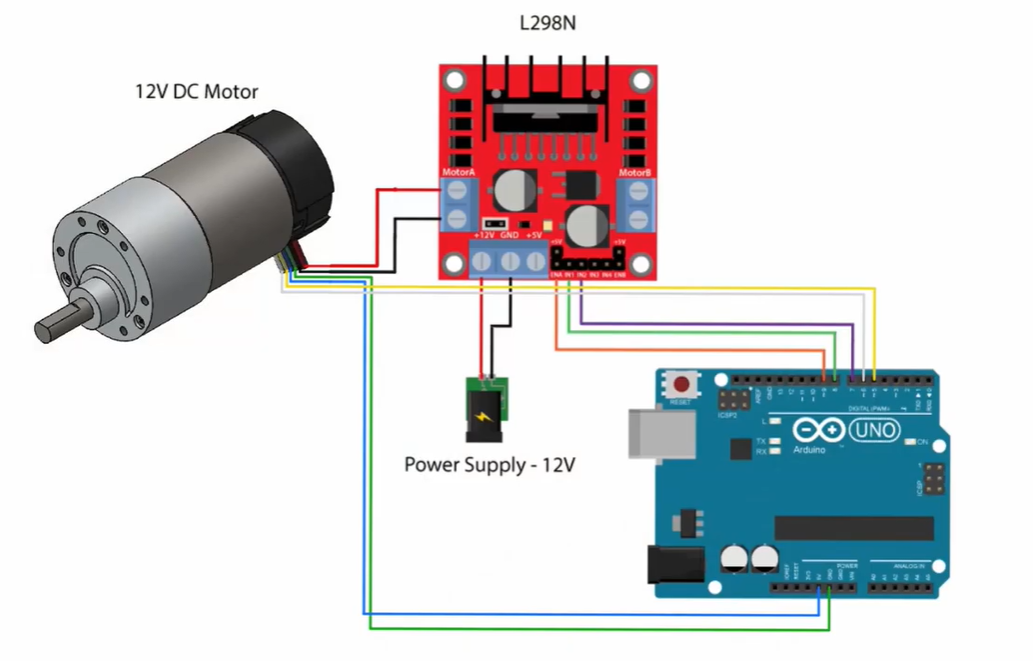 Двигатель обеспечивает поворот вала в соответствии с положением «крутилки» потенциометра.
Двигатель обеспечивает поворот вала в соответствии с положением «крутилки» потенциометра.
Как подключить электродвигатель к Arduino
Существует множество способов, чтобы подключить малые электродвигатели к Arduino. И самым популярным, а также самым простым из них является подключение двигателя через мост типа H либо через транзисторы. Подключая электродвигатель к платформе Arduino, следует помнить о том, что подключение не должно осуществляться непосредственным способом, поскольку это может привести к повреждению программной платформы.
Зачем электродвигатели подключают к Arduino
Внедрение электродвигателей в создаваемые контуры и управление при помощи Arduino открывает много разнообразных возможностей. Основной целью подключения двигателей является возможность запуска в движение элементов создаваемых систем, создание транспортных средств и даже роботов. Благодаря Arduino, возможно управление как направлением вращения вала двигателя, так и скоростью вращения.
Благодаря Arduino, возможно управление как направлением вращения вала двигателя, так и скоростью вращения.
Подключение двигателя к Arduino должно осуществляться опосредствованно
Непосредственное подключение программной платформы не только грозит перегоранием выходного порта Arduino, но также ограничивает возможность управления, созданной таким образом системой, до минимума.
Arduino через каждый выходной порт может подавать ток силой около 20 мA, а каждый, даже самый маленький электродвигатель, доступный на рынке, для правильного функционирования требует от десятикратно до тысячекратно большего потребления. Поэтому необходимо подключение электродвигателя к Arduino опосредствованным способом, через соответствующий контроллер, который урегулирует силу подаваемого тока.
Какие двигатели можно подключить к Arduino и на что следует обращать внимание в процессе их выбора
Программная платформа Arduino обеспечивает включение всех низкоамперных электродвигателей, представленных на рынке.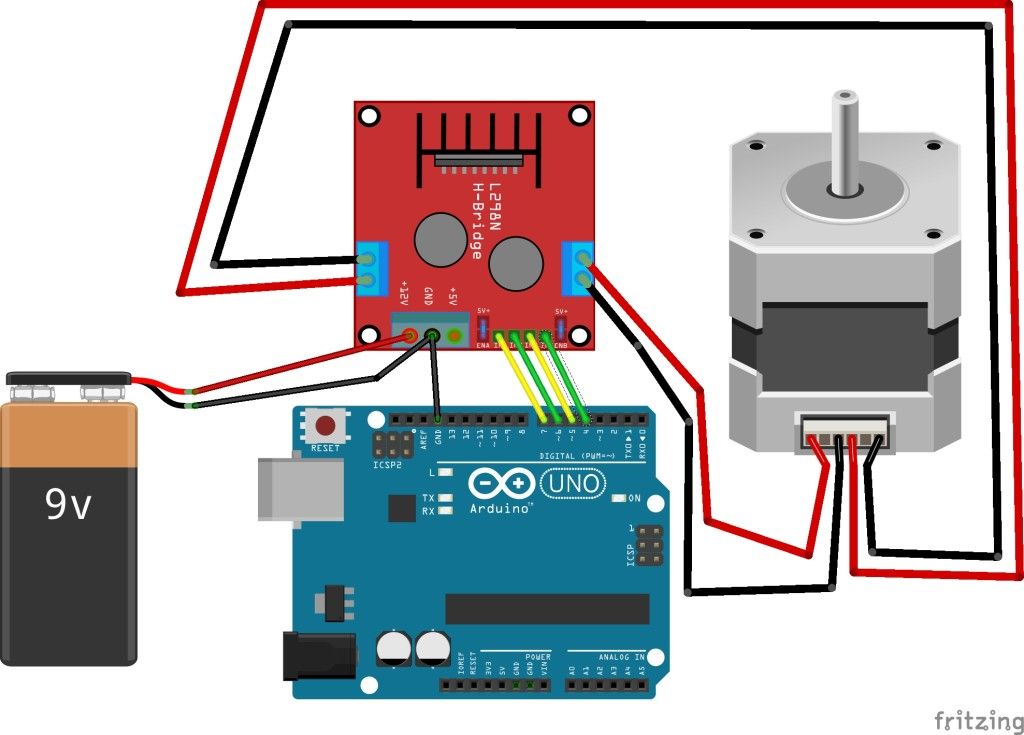 К Arduino можно подключить:
К Arduino можно подключить:
- бесщёточные двигатели BLDC с коммутатором,
- щёточные двигатели DC, которые являются самыми простыми электродвигателями с питанием током DC,
- вибрационные двигатели, которые посредством движения вала генерируют вибрацию,
- шаговые двигатели, обеспечивающие высокую точность управления посредством импульсного движения вала,
- туннельные приводы EDF, состоящие из ротора и двигателя с корпусом,
- линейные серводвигатели, обеспечивающие линейное движение,
- сервомеханизмы.
Параметры, на которые следует обратить внимание при выборе электродвигателя для Arduino, зависят от типа двигателя.
Несмотря на это, среди наиболее существенных из них следует указать:
- сила потребляемого тока [A]: параметр характеризует силу тока, который требуется для правильного запуска двигателя;
- номинальное напряжение [В]: это значение напряжения, на котором будет функционировать система; стандартно системы с Arduino работают на напряжении 12В;
- крутящий момент [Нм]: ключевой параметр электродвигателя (и не только), определяющий его мощность; чем больший крутящий момент генерирует двигатель, тем он мощнее;
- скорость вращения [об.
 /мин]: параметр, определяющий скорость вращения вала двигателя,
/мин]: параметр, определяющий скорость вращения вала двигателя, - масса и габариты [г и мм]: эти параметры являются существенными особенно при создании лёгких систем, в которых принимаются во внимание размеры двигателя,
- разрешающая способность [количество шагов]: этот параметр касается исключительно шаговых двигателей и определяет точность, с которой может двигаться вал шагового двигателя,
- линейная скорость [мм/с]: этот параметр касается исключительно линейных двигателей и характеризует скорость, с которой двигатель может выдвигать вал в линейном направлении.
 /мин]: параметр, определяющий скорость вращения вала двигателя,
/мин]: параметр, определяющий скорость вращения вала двигателя,
Как подключить электродвигатель к Arduino
Зная виды двигателей, которые можно подключить к Arduino, и параметры, на которые следует обратить внимание во время их подбора, мы можем приступить к работам по подключению. Легче всего подключить стандартные щёточные двигатели DC, вибрационные двигатели и сервомеханизмы. Несколько сложнее подключаются линейные серводвигатели, шаговые двигатели и насосы.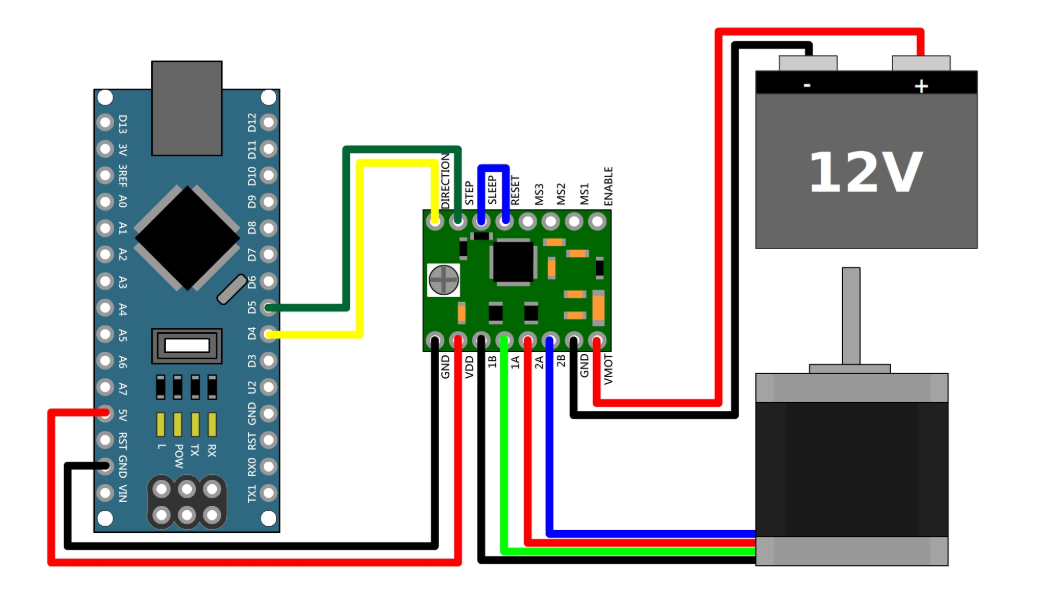
Щёточные двигатели DC и вибрационные двигатели являются наиболее простыми, они чаще всего бывают представлены в системах и одновременно являются самыми лёгкими в подключении электродвигателями. Стандартно к программной платформе подключаются двигатели с силой тока 1-5A, работающие на напряжении 5-9В. Для более мощных двигателей с большими параметрами применяются специальные контроллеры.
Щёточные двигатели DC и вибрационные двигатели можно подключить при помощи системы с транзистором либо через мост типа H. Первый метод позволяет осуществлять управление только скоростью вращения вала двигателя, а метод подключения через мост обеспечивает управление как скоростью, так и направлением вращения вала. Поэтому также следует подобрать соответствующий метод подключения согласно собственным потребностям и целям.
Подключение щёточного двигателя DC и вибрационного двигателя через транзистор
Подключение щёточного двигателя DC и вибрационного двигателя при помощи транзистора является очень простым и требует только трёх компонентов: ограничивающего резистора, выпрямительного диода и транзистора. В системе можно использовать, например: выпрямительный диод 1N4148 или 1N4007, транзистор 2N2222 и ограничивающий резистор с сопротивлением 10 кОм. Работы по подключению следует начать с выбора контакта Arduino с соответствующим выходным напряжением.
В системе можно использовать, например: выпрямительный диод 1N4148 или 1N4007, транзистор 2N2222 и ограничивающий резистор с сопротивлением 10 кОм. Работы по подключению следует начать с выбора контакта Arduino с соответствующим выходным напряжением.
Контакт Arduino подсоединяем на контактной плате к резистору и в самом конце — к базе транзистора. Эмиттер транзистора мы заземляем, а его коллектор подключаем к двигателю через параллельно подключённый выпрямительный диод. С другой стороны двигатель следует подключить к питанию. Резистор в схеме ограничивает силу тока, который поступает к транзистору, а выпрямительный диод ограничивает риск возникновения обратных токов и выбросов (скачков напряжения), которые имеют место при включении системы. Обратные токи и пики могли бы привести к повреждению программной платформы.
Подключение через мост типа H
Этот способ подключения гарантирует возможность управления не только скоростью, но и направлением вращения вала двигателя. Насколько в случае вибрационных двигателей управление направлением вращения их вала обычно является необоснованным (поскольку они будут генерировать вибрацию вне зависимости от направления вращения вала), настолько управление валом щёточного двигателя DC обычно является ключевой функциональностью системы.
Более того, через мост типа H можно также подключить линейный серводвигатель, если его конструкция основывается на двигателе DC. Мосты типа H можно самостоятельно построить из нескольких транзисторов либо приобрести готовые системы. Их основным заданием является приём сигнала, который посылается Arduino, и трансформация его параметров на выходе моста. Если мы хотим подключить щёточные двигатели DC, вибрационные либо линейные двигатели, необходимо оснастить его ограничивающим резистором (например, с сопротивлением 10 кОм), переключателем и готовой системой моста типа H (например, SN754410, L29NE или L293D).
Мост типа H следует подобрать к системе в плане интенсивности потребляемого двигателем тока во время его максимальной нагрузки – этот параметр носит название токовой эффективности моста. Каждый мост типа H может характеризоваться несколько отличным строением и выводом контактов, поэтому перед тем, как приступить к работам по подключению, следует верифицировать схему вывода контактов в техническом описании моста. Чтобы выяснить способ подключения электродвигателя к Arduino, мы используем мост L293D. Мост L293D оснащен следующими контактами:
Чтобы выяснить способ подключения электродвигателя к Arduino, мы используем мост L293D. Мост L293D оснащен следующими контактами:
- контакт 1: отвечает за управление скоростью двигателя,
- контакты 2 и 7: отвечают за направление вращения вала двигателя,
- контакт 8: питание VC до 36 В,
- контакт 9: может управлять скоростью второго подключённого двигателя,
- контакты 10 и 15: могут управлять направлением вращения вала второго подключённого двигателя,
- контакт 16: питание VCC до 5 В,
- контакты: 4, 5, 12 и 13: заземляемые (подключаемые к земле (GND)).
Первым шагом подключения является размещение моста типа H на контактной плате. После этого следует подключить массу моста к питанию, а затем подключить питание двигателя (или двигателей). Предпоследним этапом работ по подключению является электропитание логической системы управления мостом, последним этапом — подключение контактов, отвечающих за управление работой двигателя (либо двигателей).
Перед началом подключения следует помнить о том, что система моста типа H с электрическим двигателем может быть запитана от одного либо двух напряжений. Если мы запитаем её от одного напряжения, необходимо будет использование источника питания, имеющего соответствующую хорошую фильтрацию, которая ограничит риск возникновения помех.
Лучшим, более популярным и безопасным решением является питание системы от двух источников. Тогда работа двигателя будет запитана от моста, а логическая часть моста (управляющая рабой двигателя) будет запитана от другого независимого источника. Поэтому 5-вольтный контакт Arduino стоит подключить к логичной части моста, а остальное питание к контактам моста, которые отвечают за управление двигателем.
Подключение сервомеханизмов
Подключение сервомеханизмов является чрезвычайно простым, поскольку их выходы всегда одинаковы. Подключение сервомеханизма к Arduino следует начать с подключения массы питания двигателя и питания системы (обычно это два 5-вольтных источника питания).
Следующим шагом является подключение выхода PWM Arduino (обозначенного знаком «~») к контакту, который управляет сервомеханизмом. После проведения работ по подключению, следует только записать соответствующую библиотеку. Подключение шаговых двигателей через выделенный контроллер Шаговые двигатели подключаются к Arduino опосредствованно через специальные контроллеры. Эти элементы следует подобрать друг к другу с учётом максимальной интенсивности тока и номинального напряжения, а сам контроллер должен соответствовать как напряжению питания двигателя, так и напряжению питания системы.
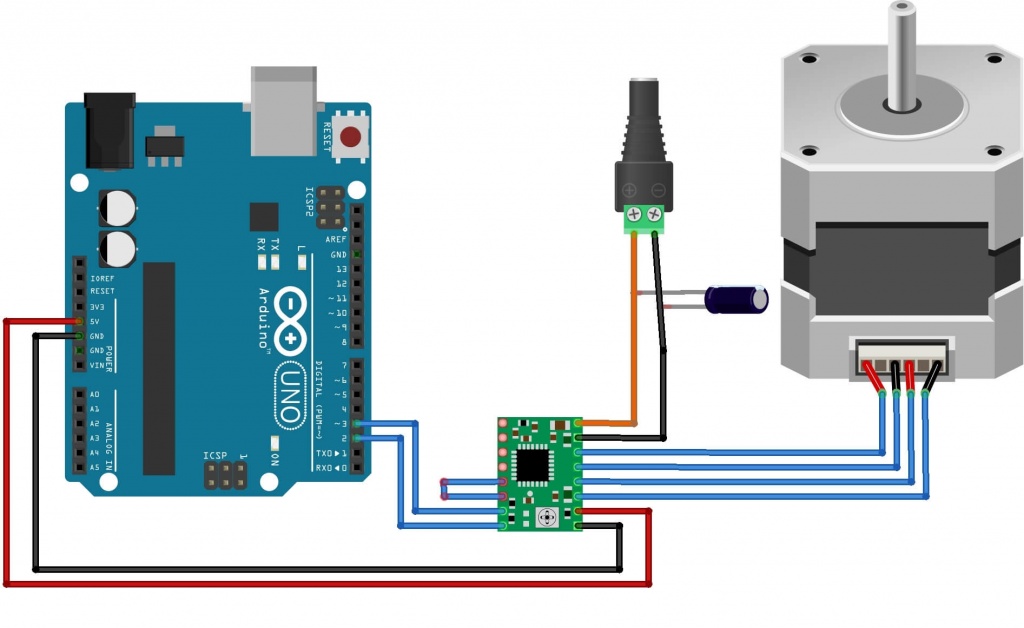
Токовая эффективность контроллера должна быть выше, чем максимальная интенсивность тока, потребляемого двигателем. Для потребностей текста следует исходить из того, что необходимо подключить к Arduino шаговый двигатель с напряжением 12В. К нему подходит, например, контроллер A4988.
Сначала мы устанавливаем контроллер на контактной плате, после чего контакты GND и VDD подключаем к питанию контроллера (3-5,5В). Контакты GMD и VMOT подключаются к питанию двигателя, а контакт SLP — к RST. Контакты 1A, 2A, 1B и 2B подключаются к двигателю.
Контакты GMD и VMOT подключаются к питанию двигателя, а контакт SLP — к RST. Контакты 1A, 2A, 1B и 2B подключаются к двигателю.
От вида шагового двигателя (того, является ли он биполярным или униполярным) зависит способ подключения контактов 1A, 2A, 1B и 2B. В биполярных двигателях контакт 1A подключается к чёрному кабелю двигателя, контакт 2A — к красному кабелю, контакт 1B — к зелёному кабелю, а контакт 2B — к голубому кабелю. Униполярные двигатели имеют шесть проводов, но жёлтый и белый кабель можно не подключать.
Правильное подключение шагового двигателя к Arduino приводит к тому, что для высокого положения вал двигателя вращается вправо, а для низкого положения — влево. Для нарастающего фронта вал двигателя делает один шаг, а его направление зависит от подключения контакта DIR.
Как использовать двигатели постоянного тока в Arduino
Ozeki 10
В этом руководстве вы сможете получить некоторую информацию о двигателях постоянного тока Arduino.
Двигатель постоянного тока является самым простым из электродвигателей и используется во всех типах электроники для хобби.
В этом руководстве представлена основная информация о двигателях постоянного тока, а также о том, как их можно подключить.
его на Arduino и как вы можете использовать его с Ozeki 10. Документ также включает
диаграммы и видео, которые помогут вам понять концепцию двигателей постоянного тока. Итак, приступим.
Что такое двигатель постоянного тока Arduino?
Двигатель постоянного тока (двигатель постоянного тока) является наиболее распространенным типом двигателя. двигатели постоянного тока
обычно имеют только два вывода, один положительный и один отрицательный. Если вы соедините эти
два провода напрямую к аккумулятору, двигатель будет вращаться. Если вы поменяете проводников,
двигатель будет вращаться в противоположном направлении.
Как использовать двигатель постоянного тока Arduino?
Для работы с двигателями постоянного тока необходимо подключить три контакта, как на схеме подключения.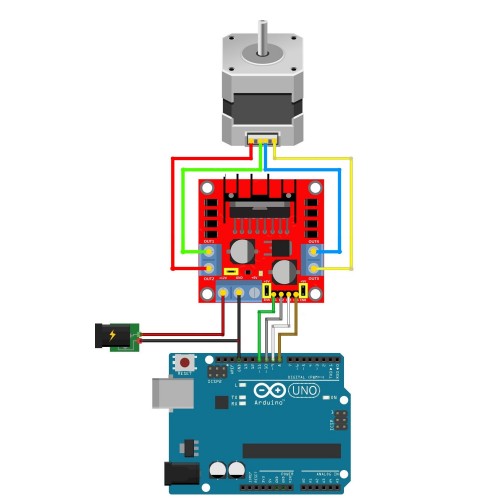
показывает это (рис. 1). Один нужно соединить с землей (Gnd), другой с
двигатель к контакту 5V. Третий контакт должен быть подключен к контакту PWM на вашем
Ардуино. С подключенным двигателем постоянного тока теперь вы сможете им управлять. Вы можете настроить
скорость вращения двигателя в диапазоне от 0 до 255.
Схема подключения двигателя постоянного тока Arduino
Рисунок 1 – Схема подключения двигателей постоянного тока Arduino
Как использовать двигатели постоянного тока Arduino в Ozeki
Контроллер двигателя постоянного тока подключает ваши двигатели постоянного тока к программному обеспечению Ozeki. Вы можете подключить до двух двигателей постоянного тока через любую микросхему драйвера двигателя L298N.
Этот чип интегрирован в плату контроллера двигателя постоянного тока LM298, а также в драйвер двигателя постоянного тока Ozeki.
Вы можете изменить направление движения и скорость обоих двигателей с помощью Ozeki.
Электродвигатели должны питаться от внешнего источника питания с максимальным напряжением 36 В.
Чтобы использовать двигатель постоянного тока в Ozeki, вам сначала нужно скачать Ozeki Robot Developer. озэки
Robot Developer установит библиотеки Arduino, необходимые для эффективного использования этого датчика.
Скачать Ozeki Robot Developer
После установки разработчика Ozeki Robot вам необходимо загрузить код управления двигателем постоянного тока.
к вашему Ардуино. Вы можете найти код и инструкции по загрузке на следующих страницах.
Процесс загрузки включает в себя два шага: сначала вам нужно отформатировать EEPROM Arduino,
затем вам нужно загрузить контрольный код. Процедура очень проста, требуется только
несколько секунд.
Загрузите код двигателя постоянного тока в Arduino Uno 9.0030 Загрузить код двигателя постоянного тока в Arduino Mega 2560
Загрузить код двигателя постоянного тока в Arduino Nano
Загрузить код двигателя постоянного тока в Ozeki Matrix
Загрузить код двигателя постоянного тока в Raspberry Pi
Двигатели Arduino и Ozeki будут обмениваться данными через порт USB с использованием протокола двигателя постоянного тока Ozeki.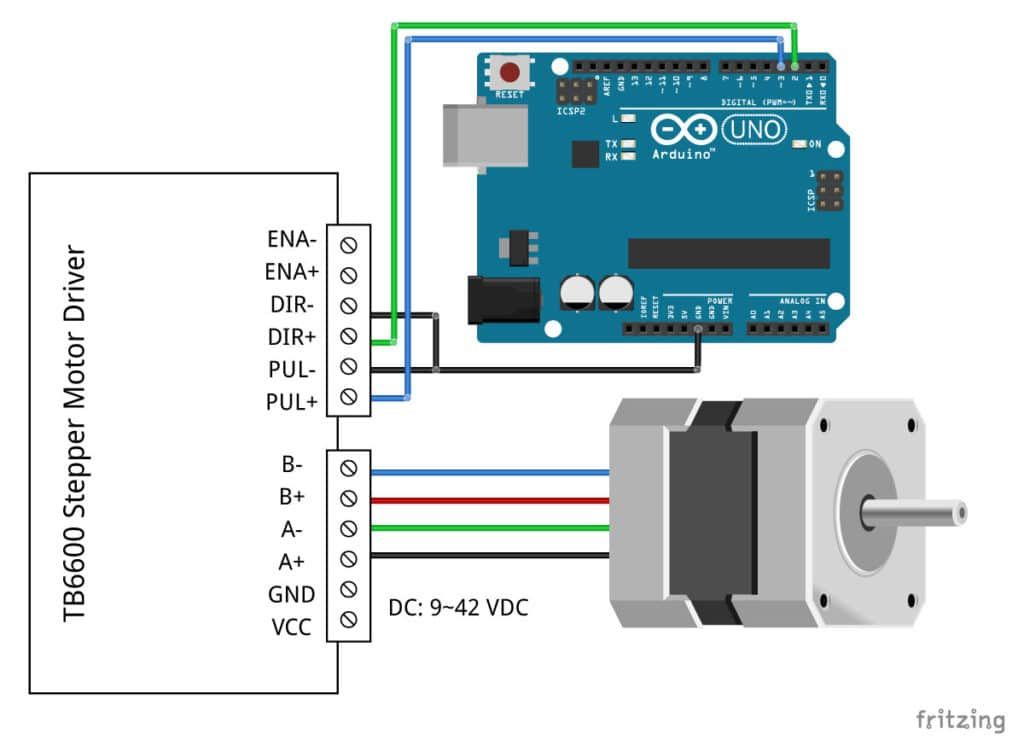 Этот
Этот
Протокол позволяет вам использовать двигатель непосредственно на вашем ПК. Вы сможете управлять этим двигателем через веб-интерфейс.
пользовательский интерфейс или вы сможете общаться с ним с помощью Ozeki Chat. Вы можете прочитать больше об управлении чатом на следующей странице.
Как общаться с двигателем постоянного тока с помощью чата
Важно понимать управление чатом, потому что когда вы строите робота,
способ, которым вы хотите управлять этим двигателем, — это отправка и получение сообщений. если ты
откройте приложение Ozeki Robot Developer, вы увидите, кому вы можете написать C#.Net
программа для работы с этим мотором.
Этапы подключения
- Подключите двигатель постоянного тока к Arduino
- Подключите плату Arduino к компьютеру
- Проверьте COM-порты, чтобы узнать, подключен ли ваш Arduino
- Загрузите пример кода в Arduino
- Откройте https://localhost:9515 в браузере
- Выберите подключение вашего двигателя постоянного тока
- Настройка атрибутов двигателя постоянного тока
- Нажмите «Обновить», чтобы проверить двигатель постоянного тока
Обзор системы
Предлагаемая нами система состоит из двигателя постоянного тока, подключенного к аналоговому порту.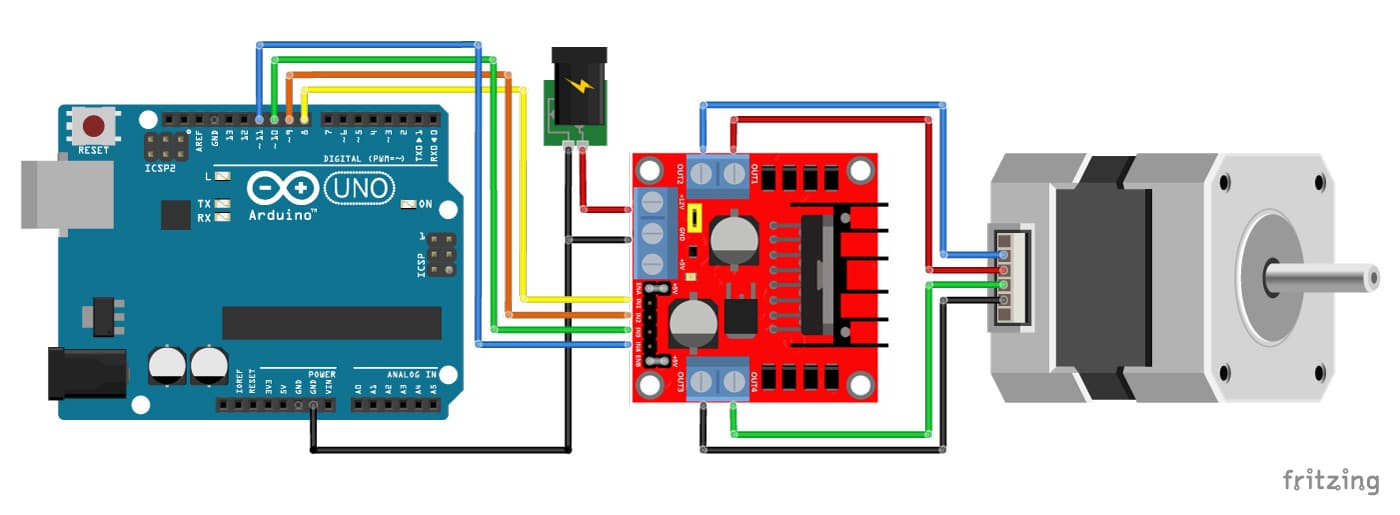
вашего Ардуино. Arduino будет отвечать за чтение данных с этого устройства.
в настоящее время. Мозг системы будет работать на ПК (рис. 2). На ПК Озеки
10 смогут управлять общением. Вы можете легко запустить Ozeki 10 с помощью веб-браузера.
Рис. 2. Конфигурация системы подключения двигателя постоянного тока к ПК с помощью Arduino
Предварительные условия
- 1 или 2 небольших двигателя постоянного тока
- Ozeki 10 установлен на вашем компьютере
- Программируемая плата (Arduino Mega/Nano/Uno, драйвер двигателя постоянного тока Ozeki или Raspberry Pi)
- Если вы не используете драйвер двигателя постоянного тока Ozeki, требуется плата контроллера двигателя постоянного тока LM298
Для подключения Arduino Mega/Nano/Uno, драйвера двигателя постоянного тока Ozeki к компьютеру необходим USB-кабель
Шаг 1. Подключите двигатели постоянного тока к плате Arduino
Вы можете увидеть, как подключить двигатели постоянного тока.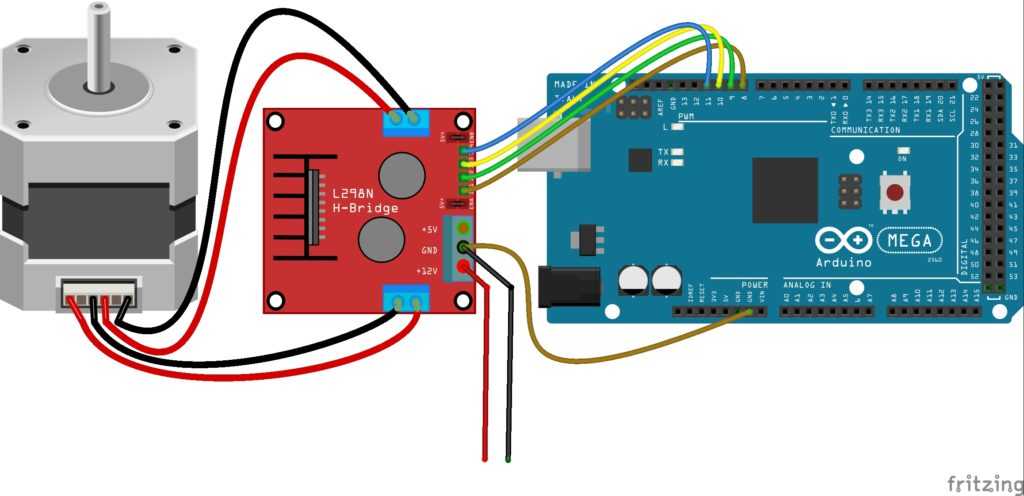
на любую из следующих досок:
- Ардуино Мега 2560
- Ардуино Нано:
Ваш браузер не поддерживает видео тег.
- Ардуино Уно
- Драйвер двигателя постоянного тока Ozeki
- Малиновый Пи
(Если вы используете Raspberry Pi, перейдите к «Шаг 3»)
После подключения подключите плату к компьютеру!
Шаг 2. Загрузить код в микроконтроллер
(Вот код для загрузки)
Ваш браузер не поддерживает видео тег.
Шаг 3. Запустите Ozeki 10, чтобы попробовать двигатели постоянного тока
Ваш браузер не поддерживает видео тег.
Шаг 4. Настройка двигателей постоянного тока в Ozeki 10
Чтобы иметь возможность настроить ваши двигатели постоянного тока (подключенные к вашему Arduino) в Ozeki 10, который установлен
на вашем компьютере вам необходимо открыть графический интерфейс пользователя (GUI) Ozeki
10. Вы можете открыть графический интерфейс, введя URL-адрес компьютера в свой веб-браузер.
Например, если наш ПК имеет IP-адрес 192.168.1.5, мы бы
введите http://192.168.1.5:9513 в наш веб-браузер.
Шаг 5. Понимание протокола двигателей постоянного тока
Контроллер двигателя постоянного тока может связываться с Ozeki через
следующий протокол.
Каталожные номера:
https://www.dummies.com
https://www.tutorialspoint.com
Конфигурации контроллера двигателя
Raspberry Pi и Arduino
Раскрытие информации: некоторые из ссылок ниже являются партнерскими ссылками. Это означает, что без каких-либо затрат для вас я буду получать партнерскую комиссию, если вы перейдете по ссылке и совершите покупку. Learn Robotics является участником партнерской программы Amazon Services LLC, партнерской рекламной программы, предназначенной для предоставления веб-сайтам возможности получать доход от рекламы за счет рекламы и ссылок на Amazon.com.
Если вы чем-то похожи на меня, значит, вам нравится собирать мобильных роботов. Я уверен, вы знаете, что мобильные роботы состоят из 5 частей: шасси, двигателей, контроллеров, датчиков и источника питания.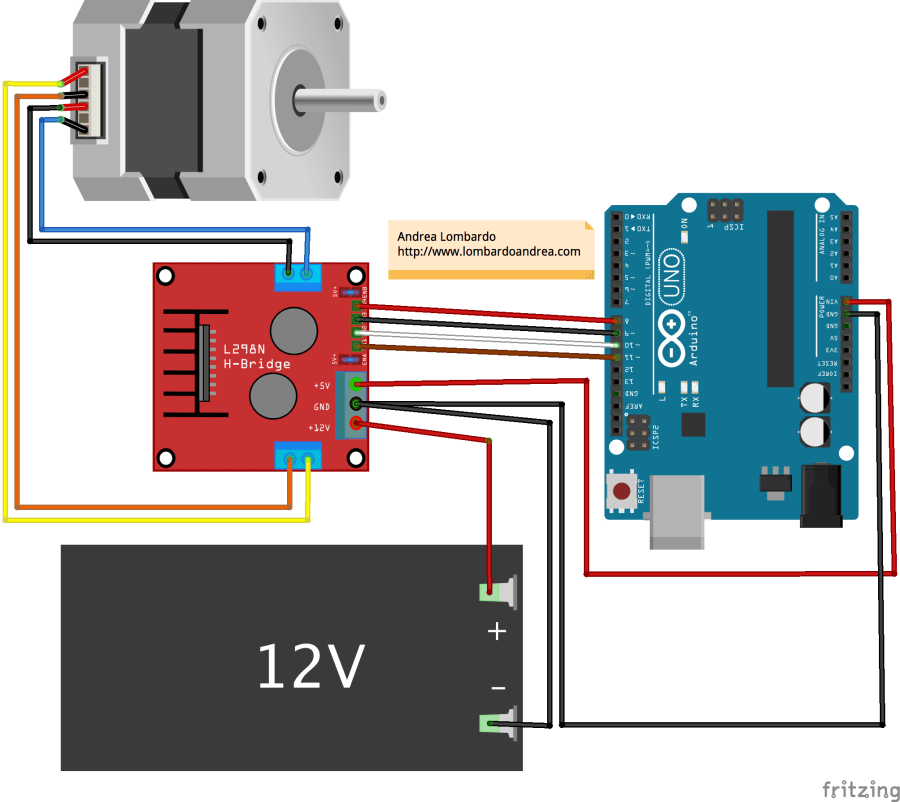 Чтобы охватить три из этих групп, вам необходимо правильно подключить двигатели к контроллерам (двигатель и главный), а затем добавить источник питания.
Чтобы охватить три из этих групп, вам необходимо правильно подключить двигатели к контроллерам (двигатель и главный), а затем добавить источник питания.
Контроллер мотора легко подключить, но его питание для мобильных устройств может оказаться сложной задачей. В этих примерах показаны схемы подключения пары двигателей постоянного тока 3–6 В, питаемых от аккумуляторной батареи 7,4 В (2 батареи 18650). Выберите контроллеры из списка и используйте электрические схемы для завершения проекта. Для удобства вы также можете добавить эту страницу в закладки и посетить ее в следующий раз, когда будете создавать мобильного робота.
В этой статье я собрал наиболее популярные или распространенные конфигурации для подключения контроллеров двигателей L298N (техническое описание) и L293D (техническое описание) к Raspberry Pi и Arduino (Uno, Nano, NodeMCU). Я составил это руководство, чтобы хранить все ресурсы и электрические схемы в одном месте.
Для удобства навигации вы можете щелкнуть ссылки ниже, чтобы найти электрическую схему на этой странице.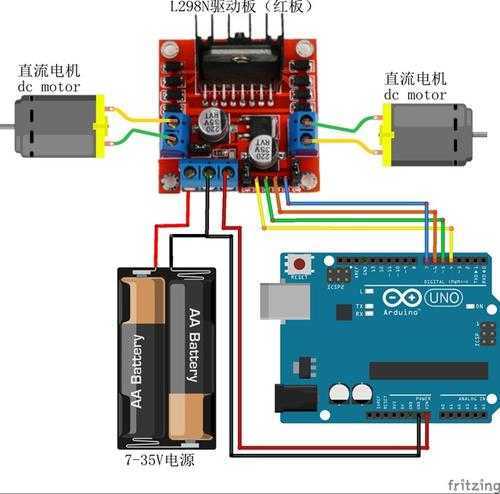
Схемы контроллера двигателя Raspberry Pi
Напоминаем, что Raspberry Pi использует оба Номера контактов Broadcom и Physical pin для контактов GPIO. Контакты Broadcom — это ссылка GPIOXX, а физические контакты — это номера, соответствующие физическому расположению каждого контакта в заголовке. Мы будем ссылаться на контакты Broadcom GPIOXX на схемах подключения ниже. Итак, с учетом сказанного, вот коллекция популярных схем подключения контроллера двигателя Raspberry Pi.
Нажмите для распиновки Raspberry Pi Zero W
L298N Схема подключения Raspberry Pi
Для этого приложения вы подключите L298N сигнальные булавки следующим образом:
L298N ENA TO GPIO18
L298N IN1 TO GPIO4
L298N IN2 — GPIO17
L298N IN3 TO GPIO27
L298N IN4 TO GPIO22
L298N ENB TO GPIO 298N. Аккумуляторная батарея.
Схема подключения L293D Raspberry Pi
L293D подключается аналогично. Вам понадобится макетная плата для подключения L293D. Вот сигнальные контакты между контроллерами.
Вот сигнальные контакты между контроллерами.
L293D Включить 1 на GPIO18
L293D IN1 — GPIO4
L293D IN2 — GPIO17
L293D IN3 — GPIO27
L293D IN4 — GPIO22
L293D Enable 2 — GPIO12
Вы можете питать Raspberry Pi от аккумуляторной батареи 5 В 2 А.
Adafruit TB6612 с Raspberry Pi
Наконец, вы можете использовать TB6612 с Raspberry Pi, если хотите использовать внешний источник питания двигателя постоянного тока. Вот как это подключено:
TB6612 AIN1 к GPIO18
TB6612 PWMA к GPIO4
TB6612 AIN2 к GPIO17
TB6612 STBY к GPIO27
TB6612 PWMB к GPIO22
TB6612 BIN2 к GPIO23
Если вы не используете Raspberry Pi, вы можете проверить схемы контроллера двигателя Arduino для своего проекта. Я собрал чертежи для Arduino Uno, Nano и NodeMCU.
Схемы подключения контроллера двигателя Arduino
Если вы предпочитаете использовать Arduino, вы можете ознакомиться с этим набором общих схем подключения контроллера двигателя Arduino.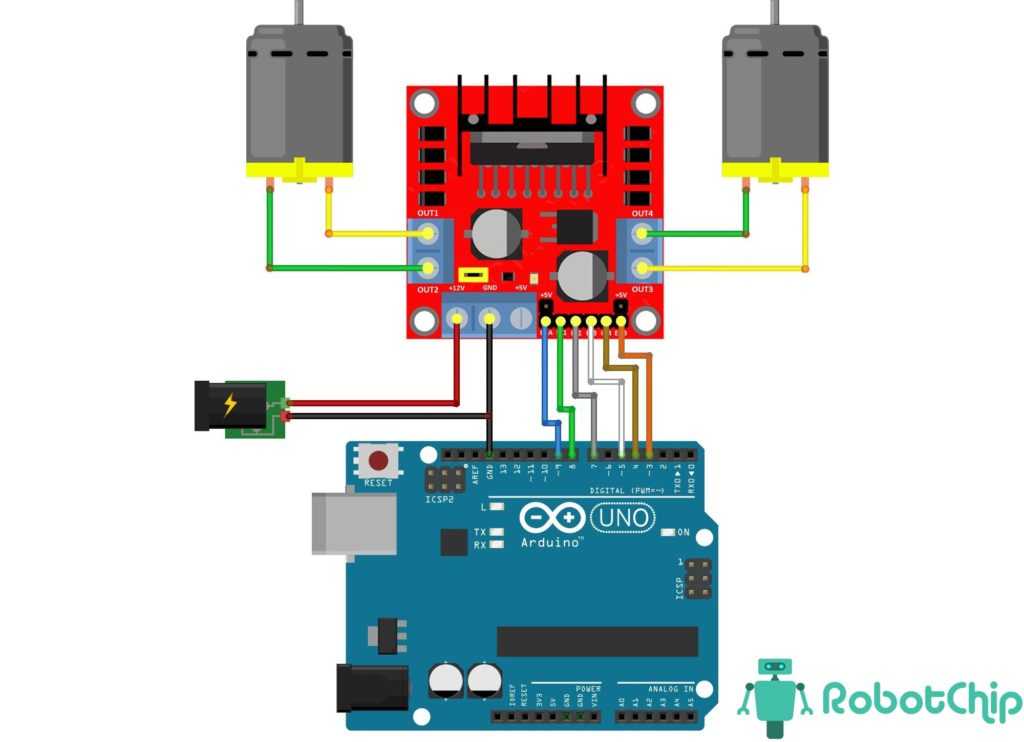 Чтобы узнать, как построить мобильного робота с помощью Arduino, ознакомьтесь с этим популярным руководством. Вы также можете принять участие в нашем электронном курсе по робототехнике, чтобы узнать больше о мобильных роботах, программировании, электронике и поучаствовать в автономных задачах. Запишитесь на курс здесь.
Чтобы узнать, как построить мобильного робота с помощью Arduino, ознакомьтесь с этим популярным руководством. Вы также можете принять участие в нашем электронном курсе по робототехнике, чтобы узнать больше о мобильных роботах, программировании, электронике и поучаствовать в автономных задачах. Запишитесь на курс здесь.
Схема подключения Arduino Uno L298N
L298N — довольно распространенный контроллер, используемый с Arduino Uno. Подключите сигнальные контакты следующим образом:
L298N ENA к цифровому 5
L298N IN1 к цифровому 2
L298N IN2 к цифровому 3
L298N IN3 к цифровому 4
L298N IN4 к цифровому 7
L298N ENB к цифровому 6
3 9000 питайте L298N от аккумуляторной батареи 7,4 В. Обязательно разделите землю между Arduino, L298N и аккумулятором. Контакт 12V на L298N подключается к шине Vcc на макетной плате. Наконец, подключите 5 В от Arduino к шине Vcc на макетной плате и к контакту 5 В на L298N. Вам не нужно запитывать Arduino с помощью USB-кабеля после того, как ваш блок питания подключен.
Готовы сделать своего робота автономнее? Из этого руководства вы узнаете, как запрограммировать контроллер мотора L298N с помощью Arduino.
Схема подключения Arduino Uno L293D
Вот схема подключения L293D для Arduino Uno. Сигнальные контакты подключаются следующим образом:
L293D Enable 1 to Digital 5
L293D IN1 to Digital 2
L293D IN2 to Digital 3
L293D IN3 to Digital 4
L293D IN4 to Digital 7
L293D Enable 2 to Digital 6
9000 , за которым следует питание между Arduino, контроллером мотора и аккумулятором.
Схема подключения Arduino Nano L298N
Создайте робота Arduino меньшего размера, используя Arduino Nano и контроллер двигателя L298N. Подключите сигнальные контакты следующим образом:
L298N ENA к цифровому 3
L298N IN1 к цифровому 2
L298N IN2 к цифровому 4
L298N IN3 к цифровому 6
L298N IN4 к цифровому 7
L298N ENB к цифровому 5
Затем прикрепите штифты на боковых выводах двигателя к боковым выводам. L298N. Затем подключите провода питания и заземления к макетной плате. Обязательно подключите питание и заземление к нано, контроллеру мотора и аккумулятору.
L298N. Затем подключите провода питания и заземления к макетной плате. Обязательно подключите питание и заземление к нано, контроллеру мотора и аккумулятору.
Схема подключения Arduino Nano L293D
Вот как подключить Arduino Nano к L293D контроллер двигателя. Подключите сигнальные контакты следующим образом. Затем соедините кабели питания, заземления и двигателя, используя схему ниже.
L293D Включение с 1 до 3
L293D In1 до 2
L293D In2 до 4
L293D In3 до 6
L293D In4 до 7
L293D Enable 2-5
Nodemcu L298N WINGAGE DIAGAGAGE 9000 2
NODEMCU L298N WINGAME DIAGAGAGE 9000 2
. (L7805 — 5 В 1,5 А), электролитический конденсатор (1 мкФ/50 В) и керамический конденсатор (100 нФ — 0603). Сигнальные контакты между NodeMCU и L298N приведены следующим образом:
L298N ENA до D2
L298N IN1 до D1
L298N IN2 до D3
L298N IN3 до D4
L298N IN4 до D6
L298N ENB TO D5
30 L298N EN используйте L293D с вашим NodeMCU.
 Вот как подключить сигнальные контакты:
Вот как подключить сигнальные контакты:
L293D Enable 1 к D2
L293D IN1 к D1
L293D IN2 к D3
L293D IN3 к D4
L293D IN4 к D6
L293D Enable 2 к D5
2 Наконец,
2 хотите проверить свою проводку и не отключать питание контроллера во время загрузки кода. Хорошей практикой является добавление выключателя питания для отключения аккумуляторной батареи, чтобы упростить проводку. Самое классное в этих конфигурациях то, что как только вы попробуете несколько из них, вы сможете сделать мобильного робота практически из чего угодно! Некоторые проекты включают Tiny Robot Cars, Robotic Tanks, Robot Cars и многое другое.
Вы построили какую-либо из этих конфигураций?
Надеюсь, эта статья окажется полезной для вашего следующего проекта мобильного робота! Отмечайте нас в своих проектах по робототехнике на Facebook и Instagram!
Тогда дайте мне знать, что вы думаете об этом посте в разделе комментариев ниже. И, если у вас есть предложение или исправление для какой-либо из этих схем подключения, обязательно включите это в свой комментарий.