Устройства управления электродвигателями необходимы для создания вашего робота. Теперь выбрана конструкция робота, исполнительные механизмы или моторы и контроллер для робота. Наконец пришло время заставить все двигаться. Первый вопрос, который многие новички задают при создании своего первого робота, — «как я могу управлять моторами?».
Для этого служат такие устройства управления электродвигателями, как контроллер двигателя. После небольшого исследования выражения «контроллер двигателя» появилось много вопросов. Что такое контроллер двигателя и зачем он мне нужен?
Содержание статьи
Контроллер двигателя — это электронное устройство (обычно это монтажная плата без корпуса), которое служит в качестве промежуточного устройства между микроконтроллером, блоком питания или батареями и моторами (двигателями).

Микроконтроллер (мозг робота) задает скорость и направление двигателей. Но он не может управлять ими напрямую из-за его очень ограниченной мощности (тока и напряжения). С другой стороны, контроллер двигателя может обеспечивать ток при требуемом напряжении. При этом не может решить, как быстро двигатель должен вращаться.
Таким образом, микроконтроллер и контроллер двигателя должны работать вместе. Для того, чтобы моторы двигались так как нам нужно, используются устройства управления электродвигателями. Обычно микроконтроллер может подавать команду на контроллер двигателя о том, как приводить в действие двигатели с помощью стандартного и простого метода связи.
Физический размер и вес контроллера двигателя могут значительно различаться. От устройства, меньшего, чем кончик пальца, используемого для управления мини-сумо-роботом до большого контроллера весом в несколько килограммов. Вес и размер контроллера двигателя обычно оказывает минимальное влияние на робота.
Хотя бывает необходимо сделать робота маленького размера или беспилотный летательный аппарат. В результате вес и размер контроллера может быть критичным. Размер контроллера двигателя обычно связан с максимальным током, который он может обеспечить. Увеличенный ток также означает необходимость использования проводов большего диаметра.
Существует несколько типов исполнительных механизмов (шаг 3). Следовательно, существует несколько типов контроллеров двигателей.
Контроллеры двигателей можно выбрать только после того, как вы выбрали свои двигатели, приводы. Кроме того, номинальный ток двигателя связан с крутящим моментом, который он может обеспечить. Так как маленький двигатель постоянного тока не потребляет много тока, но не может обеспечить большой крутящий момент. Тогда как большой двигатель может обеспечить более высокий крутящий момент, но для этого потребуется более высокий ток.

Первое соображение — это номинальное напряжение двигателя. Устройства управления электродвигателями постоянного тока обычно предлагают диапазон напряжения. Например, ваш двигатель работает с номиналом 3 В. Следовательно вам не следует выбирать контроллер двигателя, который может управлять двигателем только между 6 и 9 В. Это поможет вам исключить некоторые контроллеры двигателя из списка.
Итак, вы нашли ряд контроллеров, которые могут приводить в действие двигатель с соответствующим напряжением. Следующим соображением будет постоянный ток, который контроллер должен будет подавать. Вам нужно найти контроллер двигателя, который будет обеспечивать ток, равный или превышающий номинальный ток, потребляемый двигателем.
Если вы выберете контроллер двигателя 5А для двигателя 3A, то двигатели будут потреблять столько тока, сколько потребуется. С другой стороны, двигатель на 5А, скорее всего, выведет контроллер на 3A. Многие производители двигателей обеспечивают ток выключения двигателя постоянного тока. В результате это не дает вам четкого представления о контроллере двигателя, который вам понадобится. То есть вы не можете найти постоянный рабочий ток двигателя. В этом случае простым правилом является оценка постоянного тока двигателя примерно на 20-25% меньше тока останова.
Все контроллеры двигателя постоянного тока обеспечивают максимальный ток. Убедитесь, что этот показатель примерно в два раза выше, чем номинальный ток двигателя. Обратите внимание, что, когда двигателю требуется больше крутящего момента (например, движение вверх по склону), он требует большего тока. Выбор контроллера двигателя со встроенным охлаждением и тепловой защитой — очень хороший выбор. Еще одним важным соображением является метод управления.

Устройства управления электродвигателями используют следующие методы:
Если вы используете микроконтроллер, проверьте, какие типы соединений у вас имеются, и какие двигатели являются совместимыми для вас. Если ваш микроконтроллер имеет последовательные контакты, вы можете выбрать контроллер последовательного двигателя. Для PWM вам, вероятно, потребуется один канал PWM на двигатель.
На практике остается выбрать какой контроллер двигателя нужен — одиночный или двойной. Двойной контроллер постоянного тока может управлять скоростью и направлением двух двигателей постоянного тока независимо. Наконец часто экономит ваши деньги (и время).
Двигатели не обязательно должны быть идентичными. Хотя для мобильного робота приводные двигатели должны быть в большинстве случаев одинаковыми. Вам нужно выбирать двойной контроллер двигателя на основе более мощного двигателя постоянного тока.
Обратите внимание, что контроллеры двух двигателей имеют только одну входную мощность. Потому что если вы хотите контролировать один двигатель на 6 В, а другой на 12 В, это будет невозможно. Обратите внимание, что действующее напряжение всегда поддерживается на каждом канале. Стандартные сервомоторы предназначены для использования определенных напряжений для максимальной эффективности. Большинство из них работают от 4,8 В до 6 В, а их потребление тока аналогично, шаги для выбора несколько упрощены.
Тем не менее вы можете найти сервомотор, который работает при напряжении 12 В. При этом важно, чтобы были дополнительные сведения о контроллере, если ваш сервомотор не считается «стандартным». Также большинство хобби-сервомоторов используют стандартный сервопривод R / C. Это три провода, которые являются землей, напряжением и сигналом.
Теперь нужно выбрать метод управления. Некоторые контроллеры сервомоторов позволяют вам управлять положением сервопривода вручную с помощью набора кнопок / переключателей. Другие — с помощью команд UART (последовательных) или других средств. Определите количество сервоприводов, которые нужно контролировать.
Контроллеры могут управлять многими сервоприводами (обычно 8, 16, 32, 64 и выше). Вы, конечно же, можете выбрать контроллер серводвигателя, способный управлять большим количеством сервомеханизмов, чем вам потребуется. Как и контроллеры двигателя постоянного тока, метод управления является важным фактором.
Какой вы выбрали двигатель — однополюсный или двухполюсный? Выберите тип контроллера шагового двигателя соответственно, хотя почти все устройства управления электродвигателями могут управлять обоими типами. Количество проводов обычно помогает определить тип двигателя. Если двигатель имеет 4 провода, то он является двухполюсным. Если он имеет 6 или более контактов, то он является однополюсным. Выберите диапазон напряжения контроллера двигателя, чтобы он соответствовал номинальному напряжению вашего двигателя.

Определите, сколько тока требуется для каждого мотора, и узнайте, сколько тока (на катушку) контроллер шагового двигателя может обеспечить. Если вы не можете найти ток катушки, то большинство производителей указывает сопротивление катушки, R. Используя Закон Ома (V = IR), вы можете рассчитать ток (I). Как и для контроллера двигателя постоянного тока, метод управления является важным фактором.
Линейные приводы имеют три основных метода управления: DC, R / C или обратная связь. Большинство линейных приводов постоянного тока используют редукторный двигатель постоянного тока. Поэтому обычно необходим контроллер постоянного тока.
Однако некоторые линейные приводы принимают сервопривод R / C, поэтому вы выбираете контроллер серводвигателя. Если управляемый R / C линейный привод работает с более высоким напряжением, чем диапазон контроллера, привод может включать в себя отдельные провода для более высокого требуемого напряжения питания.

Другие приводы — это многочисленные электромеханические устройства. Например, искусственные мышцы из проволоки или соленоиды также должны управляться с помощью контроллеров двигателей. Ниже приведены некоторые вопросы для того, чтобы определить, нужен ли вашему приводу контроллер двигателя.
На шаге 3 мы выбрали большой мотор из базового набора LEGO MINDSTORMS Education EV3. Для этого мотора не требуется отдельного контроллера двигателя. Он подключается напрямую к выходному порту микроконтроллера EV3. В результате полностью соответствует нашей цели – созданию роботизированной платформы.

legoteacher.ru
Контроллеры моторов (называемые также регуляторами хода, регуляторами скорости) предназначены для управления скоростью вращения ротора мотора в зависимости от входного управляющего сигнала.
Обычные ESC'и, используемые в моделях вертолетов и самолетов для мультикоптеров подходят с большой натяжкой. Дело в том, что для эффективной балансировки коптера в воздухе важна скорость и точность отработки мотором управляющего сигнала. В обычных ESC'ах для снижения помех используется низкочастотный фильтр на управляющий сигнал. Также, в подавляющем большинстве случаев обычные контроллеры способны воспринимать управляющий сигнал частотой 50 Герц. Гораздо лучше себя ведут ESC'и, способные работать с сигналом ~400—450 Гц и не имеющие такого фильтра (например, Next Level 40A).
Подробнее см. тут: PWM-контроллеры моторов: Увеличение скорости реакции
 1hoch5_BL - ток до 30А, альтернативный немецкий контроллер
1hoch5_BL - ток до 30А, альтернативный немецкий контроллер  Herkules II v3 PRO - ток до 30A / 60A в пике, дорогой и компактный контроллер
Herkules II v3 PRO - ток до 30A / 60A в пике, дорогой и компактный контроллер  DJI 30A OPTO
DJI 30A OPTO
 RCTimer ESC 20A
RCTimer ESC 20A
 Turnigy TY-P1 25A
Turnigy TY-P1 25A
 HobbyKing Red Brick 25A
HobbyKing Red Brick 25A
Откалибровать контроллеры моторов можно используя полётный контроллер или подключив к аппаратуре управления (аппа) согласно инструкции. Обычно через аппу это делается так (лучше калибровать все сразу):
Не так уж и редки случаи сгорания контроллеров моторов, особенно у коптеров, работающих в режимах, близких к максимальным возможностям силовых установок, например, у гоночных FPV-миникоптеров. Если вы установили причину сгорания регулятора, ещё не описанную ниже - смело добавляйте, чтобы ваши коллеги не наступали на те же грабли.
Плохо спроектированный регулятор, плохо изготовленный или регулятор со слишком завышенным заявленным допустимым током — вероятнее всего сгорит. К примеру, миниатюрный размер таких регуляторов, как DYS SN20A и KISS 18A и, как следствие, небольшая площадь рассеивания (к тому же без радиаторов) - готовые условия для перегрева и сгорания. Не следует превышать ограничения по току при использовании таких регуляторов.
Другие конкретные случаи:
Причиной перегорания регуляторов может быть неправильное применение таких параметров настроек, как Damped Light, Motor Timing или Demag.
Если тайминги стоят слишком высокие, несоответствующие мотору, то происходит потребление слишком большого тока, моторы сильнее греются и менее эффективно работают. Для большинства моторов подойдет значение по умолчанию: "meduim". Но, например, для моторов Cobra 2204 2300KV отлично работает значение "medium-high".
Включенная функция Damped Light даёт дополнительную нагрузку на моторы и регуляторы, т.к. требуется больше энергии для активного торможения ВМГ при сбросе газа.
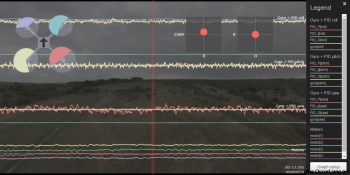
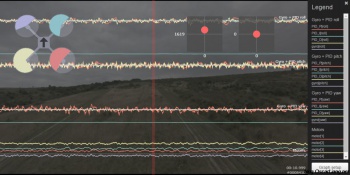
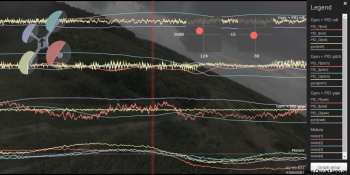
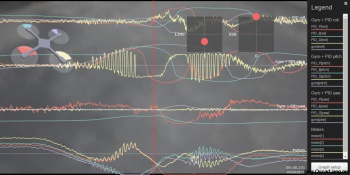
Когда значение параметра P в PID-регуляторе велико, полётный контроллер будет стремиться изменить скорость вращения моторов очень быстро, чтобы более резко стабилизировать коптер. В этом случае моторы потребляют повышенный электрический ток, в том числе и в пиках. Это вполне может вызывать сгорание регулятора.
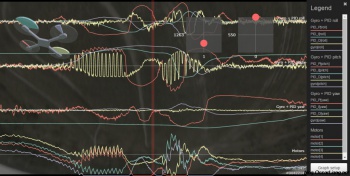
Это можно увидеть на снимках графиков, получаемых с помощью BlackBox. К примеру, вот данные двух полётов, слева - значение P = 2.0, а справа = 7.0 (как для крена так и для тангажа), все остальные параметры ПИД одинаковые.
Самыми показательными являются данные о мощности моторов (нижние линии). Хорошо видна скорость изменения вращения моторов: при высоком значении P она более высокая и, даже когда коптер не выполняет резких маневров, видны ощутимые колебания.
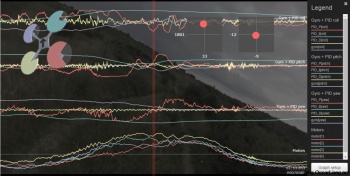
Резкий поворот вокруг своей оси:
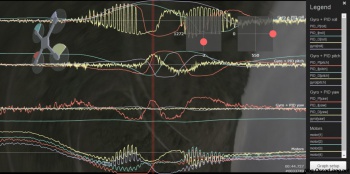
Ролл (видно два быстрых изменения скорости моторов: само вращение и перескок (или отскок), который очень большой при высоком значении P):
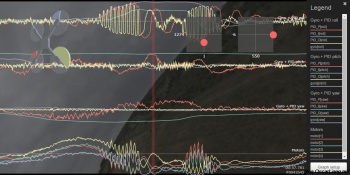
Флип (отскок выглядит очень критическим для моторов):
multicopterwiki.ru
 | Информация в этой статье или некоторых её разделах устарела. Вы можете помочь проекту, обновив её и убрав после этого данный шаблон. |
Контро́ллер — многоступенчатый, многоцепной коммутационный аппарат с ручным управлением, предназначенный для изменения схемы главной цепи электрического двигателя или цепи возбуждения, включения и выключения электрической цепи с возможностью одновременно производить сложные переключения схемы управления с помощью одной рукоятки (маховика).
Барабанные контроллеры применяются для управления электрическим двигателем до 60 кВт (включение, выключение, изменение направления вращения и частоты вращения) при редких включениях (до 240 включений в час). Недостатком барабанного контроллера является невысокая износостойкость.
Барабанный контроллер состоит из вращающегося вала и группы неподвижных контактов. На изолированном валу крепятся металлические сегменты разного размера, расположенные под разными углами друг к другу и являющиеся подвижными контактами контроллера. Отдельные сегменты могут быть электрически соединены между собой.Неподвижные контакты (контактные пальцы) крепятся на неподвижном основании и изолированы друг от друга. Каждый контактный палец соответствует сегменту вращающейся части контроллера. К ним подключаются внешние проводники.При повороте вала контактные пальцы соприкасаются с сегментами в последовательности, определяемой взаимным расположением, размерами сегментов и наличием соединений между ними.
Управляется с помощью рычага, число включений в час достигает 600. Особенностью является то, что включение происходит за счёт пружины, а выключения за счет кулачка, поэтому контакты разводятся даже при сваривании.
Предназначены для плавного регулирования поля возбуждения крупных генераторов и для пуска двигателей большой мощности, так как имеют много ступеней для переключения. Управляется с помощью винтов, которые приводятся в движение с помощью электрического двигателя через червячную передачу. При ремонтных работах контроллер приводится в движение вручную, с помощью рукоятки. Недостаток — малая износостойкость.
dvc.academic.ru
 Автор - Сергей Потупчик (serj)
Автор - Сергей Потупчик (serj) Данная статья посвящена практическим аспектам применения регуляторов хода (далее - контроллеров) для бесколлекторных моторов, и особенностям их эксплуатации.
Бесколлекторные моторы, и соответственно регуляторы хода для них можно разделить на 2 основных класса - с датчиками положения ротора и без них. Бездатчиковые проще в изготовлении, поэтому большинство моторов и контроллеров в настоящее время именно такие (кроме специальных автомодельных). Далее речь пойдет именно о бездатчиковых регуляторах хода.
Большинство применяемых в моделизме бесколлекторных моторов построены по принципу "вывернутого наизнанку" коллекторного двигателя: статор с обмотками неподвижен, а ротор с постоянными магнитами вращается. Количество обмоток – всегда три.
Среди бесколлекторных моторов для моделизма можно выделить две основные группы - с внутренним ротором, где постоянный магнит вращается внутри обмоток, и с внешним ротором (outrunner). Последние имеют, как правило, большее количество магнитных полюсов, и больший крутящий момент по сравнению с моторами с внутренним ротором, что позволяет применять их на авиамоделях без использования редуктора - они могут «напрямую» крутить винты большого диаметра.
 |  |
Максимальный постоянный (сontinius) ток – указывает, какой ток контроллер способен держать продолжительное время. Как правило, этот параметр входит в обозначение контроллера (например Jes -18, Phoenix -10). Иногда указывают величину "кратковременного" тока, допустимого в течении нескольких секунд.
"Кратковременный" ток способны держать выходные транзисторы контроллера, но рассеивать выделяемое при этом токе количество тепла контроллер не в состоянии.
Максимальное рабочее напряжение - указывается, с каким количеством NiCd или литий-полимерных банок можно использовать контроллер. Для контроллеров с ВЕС-ом, эта величина может быть разная, в зависимости от количества сервомашинок. Это связано с рассеиванием тепла стабилизатором схемы ВЕС - при большем числе банок максимальный ток нагрузки BEC и, следовательно, количество сервомашинок меньше. Как правило, если используется ВЕС, количество банок не превышает 12. Если вы хотите работать с большим количеством банок, то придется ставить или отдельную батарею питания приемника, или использовать внешний ВЕС. Но в любом случае нельзя превышать максимальное напряжение, допустимое для контроллера.
Максимальные обороты (maximum rpm) - программное ограничение максимальных оборотов. Всегда указывается для двухполюсного двигателя. Для многополюсных моторов это число надо разделить на количество пар полюсов. Например, если указано 63000 rpm, то для мотора с 12-ю магнитами максимальные обороты будут 63000/6=10500 rpm, а это уже не так много... Данная функция не дает мотору набрать большее, чем указано количество оборотов, некоторые контроллеры при превышении этого значения на холостом ходу начинают сбоить, вызывая значительные броски тока - мотор начинает резко дергаться. Этот эффект не является признаком неисправности мотора ли контроллера.
Внутреннее сопротивление – полное сопротивление силовых ключей контроллера, без учета проводов. Чем мощнее контроллер, тем меньше его внутреннее сопротивление. Как правило, сопротивление проводов сравнимо с внутренним сопротивлением контроллера и вносит до 30% потерь. Для примера, внутреннее сопротивление контроллера Castle Creations Phoenix-25 13 mOhm, а сопротивление 30 см провода сечением 1кв.мм – 6 mOhm, то есть почти треть потерь приходится на провода.
Частота импульсов контроллера (PWM Frequency) - как правило, составляет 7-8 Кгц. У "продвинутых" контроллеров частоту регулирования можно программировать на другие значения- 16 и 32 Кгц. Эти значения применяется в основном для высокооборотных 3-4-х витковых моторов с малой индуктивностью, при этом улучшается линейность регулирования частоты вращения.
Провода - не такое простое дело, как может показаться на первый взгляд. Есть несколько важных аспектов.
Самое главное - нельзя делать провода от контроллера до аккумулятора большой длины! Дело в том, что стартовые токи беколлекторных моторов намного больше, чем аналогичных коллекторных, и при работе моторов возникают большие броски тока. Конденсаторы, всегда стоящие на входе контроллера, должны быть специального типа, но многие производители ставят обычные.
При удлинении проводов от контроллера до батареи начинает сказываться их индуктивность, и может возникнуть ситуация, когда уровень помех по напряжению питания на входе контроллера станет настолько высок, что контроллер не сможет правильно определить положение ротора мотора (иногда при этом еще и "повисает" процессор контроллера). Известно несколько случаев полного "выгорания в дым" контроллеров, при удлинении проводов со стороны аккумулятора до 30см. Если необходимо увеличить длину проводов (например, двигатель стоит в хвосте модели), то надо увеличивать длину проводов от мотора до контроллера. Как правило, контроллеры поставляются с проводами до батареи длиной 13-16см. Такая длина вполне достаточна для надежной работы контроллера, и не следует ее увеличивать более чем на 5см.
Кроме того, длинные провода до батареи могут вызывать проблемы при резком старте мотора - контроллер может не перейти от режима старта к рабочему режиму при слишком резком прибавлении “газа”. Для предотвращения этого эффекта во многих контроллерах есть специальные настройки.
Практически все современные контроллеры имеют множество программных настроек. От них зависит режим работы, надежность, а иногда и работоспособность контроллера в паре с тем или иным мотором. Здесь мы попробуем перечислить основные настройки, и объяснить, как и на что они влияют.
Напряжение выключения мотора (cut-off voltage) – при каком минимальном напряжении на батарее мотор будет выключен. Эта функция предназначена для сохранения работоспособности аппаратуры при разряде батареи и для защиты самой батареи от переразряда (последнее особенно важно для литий- полимерных аккумуляторов). На некоторых контроллерах (например, Jeti серии “ Advansed ”) нет установки напряжения на конкретное число банок в случае использования литиевых батарей, количество банок при этом определяется автоматически.
Тип выключения мотора (cut-off voltage) – как правило имеет 2 значения - плавный (soft cut-off) и жесткий (hard cut-off).
При плавном выключении мотора контроллер сбрасывает обороты постепенно, не позволяя напряжению на батарее упасть ниже заданного, при этом контроль над моделью сохраняется до последнего.
При жестком - мотор немедленно останавливается если зафиксированно падение напряжения ниже заданного. Жесткое отключение может доставить некоторые неудобства при разряженном аккумуляторе: манипулируя газом, вместо небольшой прибавки оборотов иногда получается полный останов мотора.
Тормоз (brake) – торможение мотора после установки газа в "ноль". Может иметь значения включен/выключен, на некоторых контроллерах есть еще программируемая величина тормоза 50-100% и задержка включения тормоза после полного сброса газа. Это необходимо для защиты шестеренок редуктора в случае использования больших и тяжелых пропеллеров. В некоторых контроллерах, например том же Jeti серии "Advanced" тормоз и плавное выключения мотора – установки взаимоисключающие – для включения плавного отключения мотора надо выключить тормоз и наоборот... Намудрили чехи, однако.
Опережение (Timing) – параметр, от которого зависит мощность и КПД двигателя. Может находится в пределах от 0° до 30°. Физически это электрический угол опережения коммутации обмоток.
Для двухполюсных моторов при увеличении опережения обороты и мощность на максимальных оборотах растут, а общий КПД падает. Для двух и 4-х полюсных моторов с внутренним ротором рекомендуют значения от 5 до 15 градусов. При больших значениях опережения мощность практически не растет, а КПД падает на 3-5% - это важно для соревнований, где счет идет именно на эти проценты.
Для многополюсных моторов с внешним ротором ситуация иная - для них оптимальным по КПД и мощности является опережение 25-30°. При изменении угла опережения от 5 до 25° растут и КПД и выходная мощность. Однако прирост этот невелик - около 3%. Как говорится - в полете не заметно, но осознавать приятно...
Режим старта (start mode) - не имеет как правило каких-то числовых значений, описывается только как мягкий, (soft) жесткий (hard), быстрый (fast) и пр. Быстрый старт рекомендуется для моторов без редукторов и для использования в соревнованиях. При использовании быстрого старта в моторах с редукторами возможно повреждение шестерен. Плавный старт обеспечивает меньшие пусковые токи в момент старта и позволяет избежать возможных перегрузок по току контроллера, но время раскрутки мотора до полных оборотов увеличивается.
Время акселерации или задержка акселерации (acseleleration time или acseleration delay) – устанавливает время набора оборотов после старта до максимума. Устанавливается меньше для моторов с легкими пропеллерами без редукторов и больше для моторов с редукторами и в случае срабатывания защиты по току при резком прибавлении газа.
Ограничение тока (Curent limiting) – уровень срабатывания защиты по току. Устанавливается более чувствительным в случае применения моторов с большим стартовым током и батарей с высоким внутренним сопротивлением. При этом желательно установить плавное отключение мотора, в противном случае при резких манипуляциях газом мотор будет останавливаться. Не рекомендуется отключать защиту по току, если вы не уверены ,что ток мотора не может превысить максимально допустимое значение для контроллера. Это может привести к повреждению контроллера большими стартовыми токами.
Режим газа (throttle type или throttle mode) – устанавливает зависимость оборотов мотора от ручки газа. Может иметь значения автокалибровки ( auto calibrating ) – при этом контроллер самостоятельно определяет положение малого и полного газа, а также фиксированный ( fixed ) - когда характеристика задана производителем.
Также в некоторых контроллерах присутствует режим "гувернер" (governor), он предназначен для вертолетов, когда положению ручки газа соответствуют определенные обороты, а не мощность двигателя, контроллер в данном режиме работает как автоматическая система поддержания оборотов, прибавляя мощность при увеличении нагрузки на двигатель.
Реверс (reverse) - смена направления вращения. Обычно для изменения направления вращения двигателя надо поменять местами любые два провода от мотора. Но в продвинутых контроллерах, возможно изменить направление вращения мотора программно.
В некоторых контроллерах, например в Kontronik серии "Beat", нет отдельных настроек параметров, но есть выбор комплексных режимов – планер, самолет, корабль, вертолет и даже автомобиль с задним ходом!
Тут совет один - читайте внимательно инструкцию. Как правило, вход в режим программирования делается таким образом, что при нормальном использовании включить его очень затруднительно. В некоторых контроллерах для программирования есть специальные перемычки (джамперы), а создатели Castle Creations предусмотрели кроме обычного (с передатчика), программирование через компьютер, с помощью специального USB адаптера, подключаемого к контроллеру через разъем для приемника - просто и гораздо удобней, чем считать вспышки светодиода или писки мотора...
Из нюансов следует отметить, что у некоторых контроллеров, например ТММ, процедуру программирования следует провести до конца - все параметры записываются в конце цикла программирования, а у других - например Castle Creations - программирование можно закончить в любой момент.
Как показывает практика - 70% проблем при использовании контроллеров связано со стартом двигателей. Если мотор у вас плохо стартует, то есть начинает вращаться, а потом останавливается - большинство причин кроется в больших бросках тока и как следствие, провалах питающего напряжения. В первую очередь проверьте провода до батареи. Пробную проверку лучше производить на той длине проводов, которые даны изготовителем, или короче.
Далее - попробуйте снять нагрузку с мотора и проверить его на холостом ходу. Если на хостом ходу все в порядке, а при установке пропеллера мотор упорно не желает крутится, только дергается в одном направлении, попробуйте поставить мягкий старт или увеличить время акселерации. Также здесь поможет установка плавного выключения мотора. Контроллеры, у которых есть ограничение тока, всегда имеют индикацию этого режима - опять же читайте инструкцию, чтобы установить, произошло срабатывание токовой защиты или нет...
Старые "золотые" Jeti серия Jes 18, отличаются, например одной особенностью - у них нет плавного выключения, и при попытке работы мотора с большими пусковыми токами от старых аккумуляторов, при резком движении ручкой газа мотор останавливается, если напряжение упало до 5.2 вольта. Это не неисправность контроллеров, это у них такой алгоритм выключения мотора: напряжение упало - мотор остановился...
Иногда бывает, что мотор стартует в другую сторону, набирает примерно 20-30% оборотов, потом "одумывается", и резко начинает крутится в нужном направлении. Останов и реверс сопровождаются резким броском тока, иногда срабатывает токовая защита. Данная ситуация происходит только с 2-3х витковыми двухполюсными спортивными моторами при наличии резкого старта. Причем мотор ведет так себя не всегда, примерно в 10% случаев. Выход из этой ситуации - опять же использование плавного старта.
Наличие выключателя в контроллере - это дополнительное удобство, позволяющее не залезать каждый раз вовнутрь модели, чтобы включить или выключить аппаратуру. Некоторые производители контроллеров не ставят выключателей на контроллеры предназначенные для токов ниже 40А, таковы например Castle Creations и Astro Flight.
Привлекает решение проблемы выключателей у контроллеров ТММ. У них каждая модель имеет версию с выключателем и без. Причем выключатель электронный, работает на размыкание, и если он в полете случайно оторвется (что вообще-то трудно себе представить) то контроллер и аппаратура останется включенной. Если контроллер ТММ забыть выключить, он при отсутствии сигнала с приемника начнет попискивать мотором. Подобная функция есть и у Astro Flight.
Про "выключатель" у контроллеров Jeti уже упоминалось в статье про литий- полимерные аккумуляторы, он выключает лишь питание приемника, контроллер при этом всегда включен. И не подает никаких сигналов об этом постепенно разряжая "в ноль" батарею, что для литиевых аккумуляторов заканчивается фатально.
Лидером в производстве профессиональных контроллеров для спортсменов является, конечно же Schulze Electronik – на этих контроллерах летает, плавает и ездит большинство спортсменов. Однако это и самые дорогие контроллеры.

Далее в списке популярности стоит Castle Creations – сравнительно молодая фирма (основана в 1997г), специализирующаяся исключительно на выпуске регуляторов хода. В Америке она является лидером по количеству продаж.
 |  |
Также профессиональные, но опять-таки довольно дорогие контроллеры для спортсменов делает немецкая фирма Kontronik.

Продукция чешских фирм MGM Compro (это их контроллеры называются TMM) и Jeti Models (они же делают контроллеры для фирмы Hacker motors) ориентирована в основном на рынок хобби.
 |  |
Американская фирма Astro Flight, специализирующаяся на выпуске электромоторов для моделизма, также делает контроллеры к своим моторам, однако отдельно от моторов найти их в продаже проблемматично...
При выборе контроллера главный совет - внимательно изучите все характеристики приглянувшейся вам модели. У некоторых фирм, например Jeti models и MGM Compro (TMM), контроллеры на один и тот же ток и напряжение могут быть с разными версиями программного обеспечения и иметь разное число настроек. Если вы планируете использовать литий-полимерные аккумуляторы - контроллер должен иметь соответствующие настройки. При больших токах 60-80А контроллер лучше выбирать с запасом на 10-15А больше.
Цена любой вещи зависит от масштабов ее производства. Производители бесколлекторных моторов множатся, как грибы после дождя. Поэтому хочется верить, что в скором будущем цена на контроллеры и бесколлекторные двигатели упадет, как упала она на аппаратуру радиоуправления... Возможности микроэлектроники с каждым днем все расширяются, размеры и вес контроллеров постепенно уменьшаются. Можно предположить, что в скором будущем контроллеры начнут встраивать прямо в двигатели! Может, мы доживем до этого дня...
Обсудить на форумеwww.rcdesign.ru
21 ноября
П
ервое, что обращает на себя внимание при рассмотрении современных контроллеров электродвигателей, это то, что схема управления всегда определяется типом управляемого двигателя. Однако между двигателями габарита 10X и еще больших размеров и двигателями, разработанными всего лишь несколько лет назад, существует огромная разница. К тому же, современные электродвигатели стали менее дорогими и более интеллектуальными. Все это сопровождается растущими требованиями к контроллерам электродвигателей во многих областях. Управление электродвигателями является комплексной задачей, при решении которой разработчики должны не только понимать весь комплекс операций, но и уметь применять современные аппаратные средства и программные алгоритмы. Поэтому неудивительно, что к разработке контроллеров электродвигателей в последнее время подключились поставщики FPGA и IP-решений. При использовании шаговых электродвигателей разработчикам приходится усложнять алгоритмы управления для повышения эффективности. Для этого необходимо определять граничные условия для всей электромеханической системы и принимать во внимание такие переменные как температура, механические разрушения, ускорение, скорость, напряжение питания, вибрации и т.д. В настоящее время широкое распространение получили приводы для электродвигателей переменного и постоянного тока, включая универсальные двигатели переменного и постоянного тока, высокочастотные бесщеточные и щеточные универсальные двигатели с ШИМ, индукционные, частотно-регулируемые (VFD), а также шаговые электродвигатели. Интеллектуальные интегральные схемы (ИС) управления двигателями расширяют возможности регулирования работы многофазных двигателей, наиболее распространенных бесщеточных двигателей постоянного тока и трехфазных индукционных двигателей. МК и DSP позволяют осуществлять сравнительно недорогое векторное управление (ВУ), которое является серьезным математическим методом, повышающим эффективность управления бесщеточными индукционными двигателями постоянного и переменного тока. Это позволяет также уменьшать размеры двигателей, стоимость и потребление мощности, что достигается за счет непосредственного измерения поля внутри двигателя. Другим способом оперативного управления является косвенный метод ВУ. В этом случае конфигурация поля двигателя измеряется не напрямую, а рассчитывается по математической модели электродвигателя. Упор здесь делается на повышение эффективности управления электродвигателем, для чего и применяется интеллектуальное регулирование, позволяющее экономить электроэнергию. Это особый случай применения VFD-схем. Такие схемы оптимизируют ускорение и замедление электродвигателя и выключают его, когда он не используется. VFD является системой управления скоростью вращения электрического двигателя переменного тока за счет регулирования частоты напряжения, подаваемого на электродвигатель (см. рис. 1). VFD также называют приводом с регулируемой частотой (AFD), приводом с переменной скоростью (VSD), приводом переменного тока, микроприводом или инверторным приводом. Поскольку напряжение меняется одновременно с частотой, такие приводы называют иногда регуляторами переменного тока с переменным напряжением и переменной частотой (VVVF).
 |
|
Рис. 1. Применение частотно-регулируемых приводов (VFD) в схемах управления электродвигателем |
VFD позволяют экономить электроэнергию. Например, когда двигатель пытается остановить инерционную нагрузку, он может работать как генератор, динамически преобразующий кинетическую энергию в полезное тепло при помощи мощных тормозных резисторов. Поэтому многие современные двигатели оборудованы VFD-приводами.
Texas Instruments была одной из первых компаний, предложивших новую линейку макетных платформ DRV8412-C2-KIT для приводов щеточных шаговых электродвигателей постоянного тока. Данная платформа обеспечивает все программные и аппаратные средства, необходимые для управления бесщеточными шаговыми электродвигателями постоянного тока, работающими номинально при 6 А и в пиковом режиме при 12 А и 50 В. Такие системы предназначены для медицинских насосов, устройств открывания дверей, систем освещения, станков в текстильной индустрии и приложений робототехники. Данная платформа включает привод двигателя DRV8412, MCU модуль реального времени C-200 Piccolo, быстродействующий графический интерфейс пользователя (GUI), полный исходный текст программы, интегрированную среду разработки (IDE) Code Composer Studio, а также двигатель. Microchip Technology Inc. анонсировала недавно две оценочные платы, одну — для управления высоковольтными двигателями (dsPICDEM MCHV), а другую — для управления шаговыми двигателями (dsPICDEM MCSM). Обе снабжены подробными указаниями по применению и программами FOC с открытым исходным кодом, и на их основе с помощью цифровых сигнальных контроллеров управления электродвигателями семейства dsPIC33 MicrochipTechnology можно довольно быстро реализовывать новые приложения. В состав платы dsPICDEM MCHV включена также система управления корректором коэффициента мощности. Компания Performance Motion Devices производит специализированные процессоры Magellan motion серии 58000 для управления электроприводом. Эти МК отслеживают 64 переменных, характеризующих движение, что позволяет создавать высокоэффективные приложения по управлению двигателями. Они способны захватывать и сохранять в аппаратных буферах сигналы реального времени восьми разных функциональных групп, таких как генерация траектории перемещения, обратная связь кодировщика, сервоуправление, коммутация, выходы двигателя, входы общего назначения, статусные сигналы и сигналы системного таймера. Приводы электродвигателей разработаны для широкого спектра типов шаговых двигателей. Например, в семействе драйверов для микрошаговых электродвигателей серии BD638xxEV компании Rohm Semiconductor можно выбрать несколько режимов работы: от полношагового режима до режима с микрошагами, равными 1/16 от полного шага, при выходном токе при полном шаге 1,0 или 2,0 А и 2,5 А при микрошагах, равных 1/8 от полного шага. Такие приводы выпускаются в ультратонких корпусах HTSSOP-B28. Они имеют уникальную опцию защиты от подачи ложного напряжения, что предупреждает выход двигателей из строя, а также имеют встроенную защиту по току, напряжению и от перегрева. Компания Galil Motion Control, одна из первых в разработке систем управления перемещением, представила недавно серию плат и корпусов контроллеров движения DMC-41x3 для Ethernet-приложений. Новые контроллеры компании Galil серии Econo имеют много улучшений по сравнению с предыдущими сериями, включая возможность работы с 100-Base-T Et Ethernet и портом USB 2.0. Они характеризуются большим быстродействием, большей программной памятью, а также аналоговыми входами и оптически изолированными входами/выходами. В презентации этой продукции сказано, что по сравнению с более ранней версией DMC-21x3, новый контроллер DMC41x3 лучше работает на более высоких скоростях, может принимать сигналы по входам кодировщика с частотой до 15 МГц, а его время отклика по контуру регулирования не превышает 62 мкс. Память контроллера для пользовательских программ и массивов увеличена вдвое. DMC-41x3 может работать в автономном режиме или быть подключенным к персональному компьютеру через Ethernet 10/100-Base-T или USB. Имеется также дополнительный порт RS-232. Контроллер выпускается в одном из восьми выходных форматов, каждый из которых пользователь может конфигурировать для работы с серво- или шаговыми электродвигателями. DMC-41x3 может подключаться к внешним приводам, подстраиваться под любые диапазоны напряжения питания, работать с многоосевыми (500 Вт/ось) сервоприводами компании Galil или с микрошаговыми приводами на 60 В, 3 А. 4-осевые модели имеют 16 оптически изолированных стандартных входов/выходов, а 5–8- осевые модели — 32 входа/выхода. В дополнение к оптически изолированным входам/выходам в контроллере имеются 8 аналоговых входов и отдельный вход для каждой оси. DMC-41×3 выпускается в корпусах 8,1×7,25×1,5-дюймов для 1–4-осевых моделей и 11,5×7,25×1,5 дюймов для 5–8-осевых моделей.
Небольшие OEM-компании при разработке систем управления электродвигателями все большее внимание уделяют FPGA, которые позволяют объединять универсальные ШИМ-блоки, интерфейсы преобразователей и специфические предварительно сконфигурированные блоки управления двигателем. Во встроенном в FPGA контроллере имеются соответствующие программные драйверы. Основным достоинством FPGA является возможность применения IP по управлению двигателями, например, компании Alizem. Эта компания предлагает полный комплект IP по управлению и диагностике двигателей, разработанный для высокоэффективных и безопасных домашних приложений. Altera при разработке системы управления двигателем для домашних устройств Cyclone III FPGA (см. рис. 2) высоко оценила IP-продукт, созданный компанией Alizem. Все созданные кампанией Alizem IP-продукты для управления электродвигателями спроектированы по ее собственному алгоритму. Полный привод синхронного электродвигателя с постоянным магнитом, включающий ШИМ и цепи регулирования тока, реализованный на базе недорогого Altera Cyclone III FPGA, состоит примерно из 500 логических элементов. Actel (в настоящее время вошедшая в состав Microsemi) использует для управления двигателями собственные интеллектуальные FPGA для смешанных сигналов — SmartFusion (см. рис. 3). Компания утверждает, что они являются единственными устройствами, объединяющими FPGA, процессор ARM Cortex-M3 и программируемые аналоговые функции. Actel предлагает изготавливать изделия по техническим условиям заказчика с защитой IP и при этом простые в эксплуатации.
 |
|
Рис. 2. Cyclone III FPGA Altera, используемый совместно с IP-продуктом Alizem |
 |
|
Рис. 3. Интеллектуальные FPGA смешанных сигналов SmartFusion кампании Actel |
Другой поставщик FPGA, компания Xilinx, использует свои FPGA для разработки, как она считает, самых совершенных FPGA-систем управления электродвигателями. Планируется, что Targeted Design Platform будет соответствовать этому утверждению.
Ключевые компоненты систем управления двигателями также улучшают свои технические характеристики. Рассмотрим для примера 12-разрядный чип магнитного энкодера Renishaw. Этот чип реализован по технологии кодировщика OnAxis, но отличается от него большей функциональностью и меньшей стоимостью. Кодировщик оснащен UVW-выходами с 16 полюсами (8 пар полюсов), выходами тахогенератора и потенциометра, а также выходами синусоидальных сигналов. Его разрешение составляет 12 разрядов (4096 шагов за оборот) с программируемым положением нуля. Кодировщик работает в диапазоне напряжений 3,3…5 В, а при работе от аккумуляторов может использоваться опция режима ожидания. Он может поставляться как уже запрограммированным, так и со встроенным чипом EEPROM для хранения программ пользователя. Кодировщик может работать со скоростью до 60 тыс. оборотов в минуту в температурном диапазоне –40…125°C. Компания Rohm Semiconductor применила SiC-технологию для организации серийного выпуска первых модулей на базе SiC MOSFET с вертикальным затвором и барьерами Шоттки, используемыми для управления двигателями автомобилей. Устройства, рассчитанные на работу при 600 В и 450 А, характеризуются эффективностью на 50% большей, чем аналогичные кремниевые модули и могут работать при температуре до 200°C.
Вы можете скачать эту статью в формате pdf здесь.
www.russianelectronics.ru
Доброго здоровья всем. За последние годы у меня скопилась куча шаговых двигателей, да все руки до них не доходили, а ведь шаговик штука очень интересная и нужная. Да, еще в Интернете прочитал, что много нашего брата мучаются с запуском таких двигунов, вот и решил сделать контроллер для проверки наиболее часто встречающихся шаговых двигателей.
Шаговые двигатели достаточно распространены в устройствах, в которых необходимо добиться точного перемещения механизмов. Существует очень много типов шаговых двигателей, но самыми простыми в плане управления являются 2-х фазные униполярные двигатели. Этот тип двигателей имеет две независимые (см. Рис.1)обмотки с выводами от середины. Их можно встретить в таких аппаратах, как принтер, копир, дисковод и т.д.

Схема управления шаговым двигателем представлена на рисунке 2. Сперва хотел разработать схему на жесткой логике, но когда определился с функциями, которые она должна выполнять, пришло твердое решение использовать для этих целей микроконтроллер. И так, что можно определить с помощью данного блока управления.
Сперва хотел разработать схему на жесткой логике, но когда определился с функциями, которые она должна выполнять, пришло твердое решение использовать для этих целей микроконтроллер. И так, что можно определить с помощью данного блока управления.
1. Можно определить количество шагов.2. Определить один из двух алгоритмов работы двигателя.3. Опробовать работу двигателя в полушаговом режиме.4. Можно опробовать работу в полношаговом режиме.Еще раз повторюсь, что разновидностей шаговиков много и не для всех подойдет данный контроллер.
Программа управления состоит из пяти подпрограмм, которые переключаются кнопкой BS3 – «Выбор программ». Номер выбранной подпрограммы отображается тремя светодиодами в двоичной системе счисления. При первом включении должен засветиться светодиод HL1, индицирующий о том, что включена первая подпрограмма работы шагового двигателя в полушаговом режиме. Запуск двигателя осуществляется кнопками «Право» и «Лево». Право – двигатель должен крутиться по часовой стрелке, лево – против часовой, но направление вращения зависит еще и от того, как вы скоммутируете обмотки двигателя. Возможно, придется эксперементировать. На скриншоте 1 (передняя панель виртуального осциллографа программы Proteus) можно наблюдать импульсную последовательность и коды полушагов работы двигателя. Некоторые из шаговиков по этому алгоритму у меня не работали.

Подпрограмма №2 – светится второй светодиод. В этой подпрограмме двигатель будет работать по полношаговому алгоритму, показанному на скрине 2. Подпрограмма №3 – светятся первый и второй светодиоды. В этой подпрограмме двигатель будет работать по полношаговому алгоритму, показанному на скрине 3.
Подпрограмма №3 – светятся первый и второй светодиоды. В этой подпрограмме двигатель будет работать по полношаговому алгоритму, показанному на скрине 3.
Подпрограмма №4 – светится третий светодиод. Данная подпрограмма обеспечивает один шаг двигателя при каждом нажатии на кнопку «Право». Кнопка «Лево» в данном случае не задействована. Короче говоря, нажимая каждый раз на кнопку, можно сосчитать количество шагов за один оборот проверяемого двигателя. Алгоритм работы двигателя в данной подпрограмме соответствует алгоритму на скрине 2.
Подпрограмма №5 – светятся первый и третий светодиоды. В этой подпрограмме творится тоже самое, только алгоритм работы двигателя в данной подпрограмме соответствует алгоритму на скрине 3.
Общий вид платы — на фото.
Файл прошивки, схему и рисунок печатной платы можно скачать здесь. Успехов всем. До свидания. К.В.Ю.
Скачать “Контроллер для проверки ШД” Shagov-dvigatel.rar – Загружено 720 раз – 20 KB
Просмотров:22 091
www.kondratev-v.ru
Главной частью системы впрыскатоплива является контроллер системы управления мотора. Нередко, данноеустройство называю «мозгом», тем самым подчеркивая важность исполняемой роли.Контроллер (control — с английского переводится как «управление») представляетсобой вычислительный и коммутационный центр системы управления. Ориентируясь наданные полученные от датчиков, контроллер по заранее заложенным алгоритмамвыдает управляющие команды исполнительным элементам системы управления.



Конструкция контролера представлена в видеметаллического корпуса, с расположенной внутри печатной платой, на которойрасполагаются электронные компоненты. Сигнальные провода, сформированные вобщий жгут, идущий от датчиков, бортовой сети и исполнительных устройствподключается к многополюсному штекерному разъему контроллера. Нужно отметить,что контроллер должен выдерживать достаточно жесткие условия эксплуатации –широкий диапазон колебаний влажности воздуха, температуры (в среднем от -40 до+80 градусов по Цельсию), а также сильную вибрацию и другие факторы. Такимобразом, производители предъявляют высокие требования к конструкции контроллераи используемым электронным компонентам. Особое значение имеет электромагнитнаясовместимость устройства, то есть устойчивость к внешним электромагнитнымпомехам и уровень излучения высокочастотных помех генерируемых самим прибором.
Структура современных контроллеров системыуправления включает в себя следующие элементы:
Процессорная часть являетсянаиболее важной, так как именно в данном элементе формируются основные команды.Как правило, процессорная часть представлена однокристальным микропроцессором –микроЭВМ. Название связано с тем, что практически все микропроцессорныеэлементы располагаются на одном кремниевом кристалле электронной микросхеме,иными словами на чипе. В настоящее время в контроллерах применяются 8-, 16- или32-разрядные микропроцессоры. В качестве пояснения следует заметить, чторазрядность является показателем количества бит информации, которой оперируетмикропроцессор. Основными компонентами микроЭВМ являются:
Сигнал, полученный от датчика,представляет собой значение физической величины, преобразованное вэлектрический импульс или же сигнал. Достигнув контроллера, сигналобрабатывается формирователем, в котором осуществляется согласование уровней,то есть усиление или же ослабление, в итоге, сигнал преобразуется до величины,которая необходима для нормального функционирования процессорной части. Помимоуказанной функции, формирователи предохраняют процессорную часть отперенапряжения. Таким образом, различают формирователи частотных, аналоговых идискретных сигналов.
Дискретные сигналы —представляют собой сигналы, которые скачкообразно меняют значение во времени. Вкачестве примера, можно привести сигнал запроса кондиционера или включениязажигания. Подобные сигналы после преобразования поступают в процессорную частьнепосредственно на выходы контактов портов ввода/вывода.
Аналоговые сигналы — характернаяособенность данных сигналов заключается в непрерывном изменении значений вовременном отрезке. Примером может послужить сигнал, поступающий от датчикадроссельной заслонки или массового расхода воздуха. Данные сигналы послеобработки поступают на выходы АЦП в процессорной части контроллера.
Частотные сигналы – основнойхарактеристикой данных сигналов является частота, изменение которойсоответствует изменениям физических величин, которые непосредственно измеряютдатчики. К примеру, сигналы, поступающие от датчика положения коленвала, такчастота пропорциональна скорости вращения. Очень важно, чтобы частотные сигналыбыли без импульсных помех, так как при наличии помех дальнейшая обработка можетбыть затруднительной. В формирователи входных сигналов частотный сигналразграничивается по амплитуде, так как амплитуда не несет нужнойхарактеристики. После разграничения сигнал поступает на вход таймера/счетчика впроцессорной части.
Основная функция формирователязаключается в преобразовании сигналов поступающих с портов ввода/вывода,расположенных в процессорной части, в сигналы необходимой мощности дляуправления исполнительными элементами системы. Выходные формирователитехнически представлены микросхемами, так называемыми драйверами, которыепомимо основной функции (усиление мощности сигнала), так же защищают контроллерот короткого замыкания, перенапряжения, замыкания на «плюс» или «массу»аккумулятора. Драйверы указанного типа не случайно называют«интеллектуальными», так как при срабатывании защитных функций, формировательспособен сообщить о возникшей проблеме процессору. В настоящее время вконтроллере используются разнообразные формирователи сигналов в зависимости оттребуемой мощности.
Существует также формировательканала диагностики, который нужен для согласования уровней сигналов поступающихот диагностического оборудования с уровнем сигналов микропроцессора.
Как известно, микросхемыформирователей и процессорная часть имеет напряжение питания равное +5 В,поэтому в контроллере используется индивидуальный источник питания. Функцияданного устройства заключается в подаче стабильного напряжения, которое недолжно меняться от изменений напряжения в бортовой сети. Таким образом, дажеснижение напряжения до 6 В, при неполностью заряженной аккумуляторной батареиили во время холодного запуска не приводит к отключению питания контроллера.
rusauto.net