Содержание
Конструктивное исполнение асинхронных двигателей для особых условий эксплуатации
Страница 32 из 40
Двигатели для особых условий эксплуатации. Не имея возможности останавливаться на конструкции всех серий асинхронных машин, предназначенных для особых условий эксплуатации, мы остановимся здесь только на самых характерных примерах.
Рис. 8-26. Вертикальный асинхронный двигатель с фланцевым креплением
Рис. 8-27. Рольганговый асинхронный двигатель
Рис. 8-28. Пример взрывозащищенного исполнения асинхронного электродвигателя
Двигатели, предназначенные для установки в различных механизмах.
Если место установки двигателя ограничено, что обычно имеет место в подъемно-транспортных машинах или в станках, часто применяется его фланцевое крепление или встроенное исполнение, как уже отмечалось в гл. 6. Характерным примером такого исполнения являются крановые двигатели, двигатели рольгангов и тому подобные машины. Некоторые из них приведены на рис. 8-26, 8-27, а также в гл. 6. Многообразие этих исполнении настолько велико, что охватить его в данной книге невозможно.
8-26, 8-27, а также в гл. 6. Многообразие этих исполнении настолько велико, что охватить его в данной книге невозможно.
Рис. 8-29. Пример взрывозащищенного исполнения обдуваемых асинхронных электродвигателей
Электродвигатели, предназначенные для работы во взрывоопасной среде.
Взрывозащищенные асинхронные электродвигатели с различной степенью защиты применяются в угольных шахтах и подобных условиях, в которых имеется опасность попадания взрывчатого газа внутрь машины и воспламенения его от искры.
Рис. 8-30. Погружной асинхронный электродвигатель
Одним из примеров такого исполнения является показанный на рис. 8-28 электродвигатель мощностью 3,5 квт, скоростью 1500 об/мин, рассчитанный на взрыв газов внутри корпуса. Корпусу этой машины придана повышенная прочность, выводные концы герметизированы, а уплотнения вала рассчитаны на то, чтобы пламя взрыва не прошло наружу. Поверх прети замков щитов и крышек подшипников обработаны не ниже класса чистоты, чтобы свести к минимуму возможные зазоры.
На рис. 8-29 показан двигатель серии ΜА с фазным ротором, рассчитанный на пониженную вероятность взрыва. Этот тип двигателей имеет несколько усиленные щиты, а также улучшенную герметизацию подшипников.
Как все обдуваемые машины, снабжен наружным вентилятором. Его корпус с двойными стенками: внутренняя представляет собой собственно корпус, ее сопряжения со щитами и крышками подшипников, а также выводные концы герметизированы, наружная стенка представляет собой вентиляционный кожух и открыта с торцов. В исполнении двигателя с контактными кольцами (рис.8-29) последние также закрыты герметической крышкой.
Погружные асинхронные электродвигатели.
Дли привода электробуров, насосов, откачивающих воду и нефть из нефтяных скважин, а также артезианских насосов применяются погружные двигатели. Это герметические машины, диаметр которых часто ограничен размерами скважины, в которую опускается насос или электробур. В принципе исполнение такого двигателя возможно и не герметическое, но практически избежать его засорения илистым раствором, охлаждающим бур, или частицами, взвешенными в воде, невозможно, поэтому реализуется герметическое исполнение с уплотнением выходящего конца вала и заполнением корпуса двигателя чистой водой, трансформаторным маслом или другим диэлектриком. Заполнение корпуса двигателя жидкостью необходимо, так как при больших давлениях, существующих в скважинах, жидкость снаружи все равно проникла бы внутрь заполненного воздухом корпуса; кроме того, тогда все наружное давление воспринималось бы стенками корпуса, которые пришлось бы существенно утолстить. При жидкостном заполнении изменение давления внутри двигателя по сравнению с наружным (вследствие нагрева) компенсируется гибким элементом корпуса — диафрагмой. На рис. 8-30 показан разрез двигателя серии ПЭДВ, полость корпуса которого заполняется чистой водой, а обмотка сделана из провода с водостойкой полиэтиленовой изоляцией.
Заполнение корпуса двигателя жидкостью необходимо, так как при больших давлениях, существующих в скважинах, жидкость снаружи все равно проникла бы внутрь заполненного воздухом корпуса; кроме того, тогда все наружное давление воспринималось бы стенками корпуса, которые пришлось бы существенно утолстить. При жидкостном заполнении изменение давления внутри двигателя по сравнению с наружным (вследствие нагрева) компенсируется гибким элементом корпуса — диафрагмой. На рис. 8-30 показан разрез двигателя серии ПЭДВ, полость корпуса которого заполняется чистой водой, а обмотка сделана из провода с водостойкой полиэтиленовой изоляцией.
- Назад
- Вперёд
Конструктивные исполнения электродвигателей по способу монтажа. Центр электроники Entrance
Самыми распространенными электродвигателями в мире, безусловно, являются асинхронные двигатели. С целью унификации, как российские, так и зарубежные стандарты регламентируют характеристики этих популярных электродвигателей. Нормативные документы определяют и конструктивные исполнения асинхронных электродвигателей по способу монтажа, иными словами – способы крепления. Не всегда на шильдике электродвигателя указывается обозначение монтажного исполнения, так как многие современные асинхронные электродвигатели собираются из унифицированных конструктивных элементов по принципу конструктора LEGO. Производитель элементов электродвигателя просто не может знать, в какой конструктивной схеме у конечного заказчика будет использован корпус со статором, на котором обычно устанавливается шильд. Поэтому, при закупке асинхронных электродвигателей у пользователей часто возникает проблема определения конструктивного исполнения.
Нормативные документы определяют и конструктивные исполнения асинхронных электродвигателей по способу монтажа, иными словами – способы крепления. Не всегда на шильдике электродвигателя указывается обозначение монтажного исполнения, так как многие современные асинхронные электродвигатели собираются из унифицированных конструктивных элементов по принципу конструктора LEGO. Производитель элементов электродвигателя просто не может знать, в какой конструктивной схеме у конечного заказчика будет использован корпус со статором, на котором обычно устанавливается шильд. Поэтому, при закупке асинхронных электродвигателей у пользователей часто возникает проблема определения конструктивного исполнения.
Как определить способ крепления асинхронного электродвигателя по его внешнему виду?
Существует различные нормативные документы, определяющие конструктивное исполнение двигателей. В этих стандартах можно видеть примерно такие таблицы:
Но основных, можно сказать базовых, конструктивных исполнений всего три – IMB3 (лапы), IMB5 (большой фланец), IMB14 (малый фланец), а также две их комбинации IMB35 (лапы и большой фланец), IMB34 (лапы и малый фланец).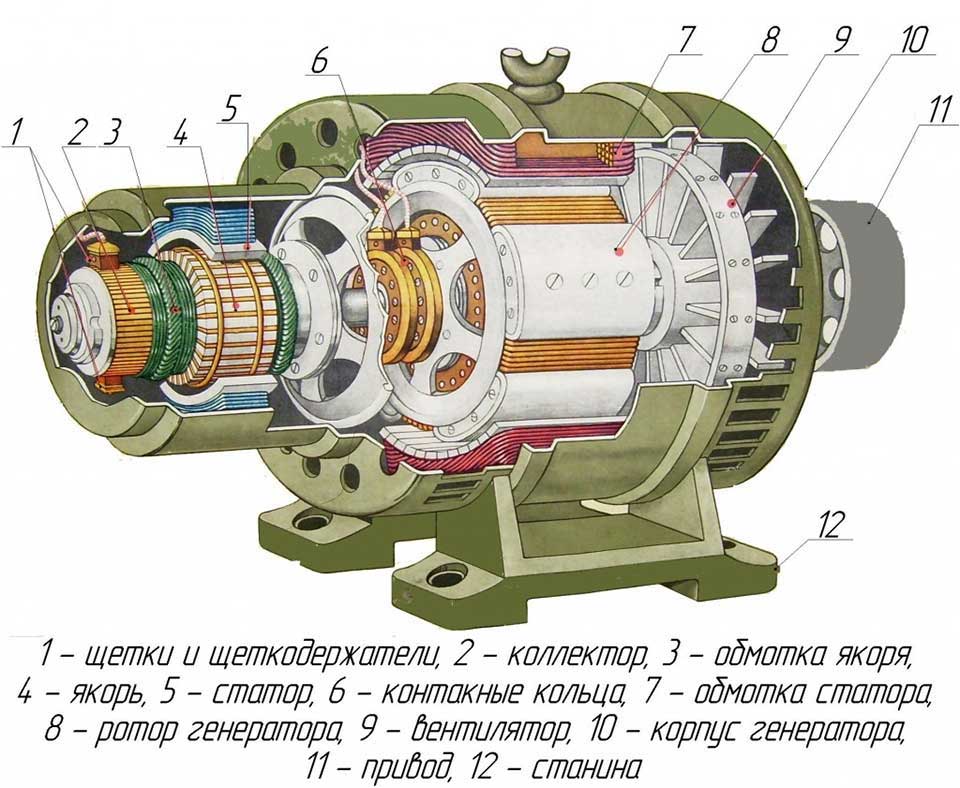
Конструктивное исполнение IMB3 (электродвигатели на лапах)
Лапами называют кронштейны, установленные с одной стороны электродвигателя, образующие плоскую опорную поверхность и имеющие крепежные отверстия для фиксации электродвигателя. Лапы могут быть как литыми, то есть быть частью корпуса, так и съемными. Съемные лапы повышают универсальность двигателя, так как могут быть установлены с любой стороны, таким образом клеммная коробка может находиться не только сверху, но и с боку.
Асинхронные электродвигатели на лапах используются в тех механизмах, где нагрузка контактирует с двигателем только через вал с использованием муфт или ременной передачи.
Конструктивное исполнение IMB5 (электродвигатели с большим фланцем)
Фланец электродвигателя – это плоская круглая опорная поверхность электродвигатели со стороны вала, на которой по радиусу расположены крепежные отверстия. Большой фланец имеет диаметр Р больше диаметра (ширины) корпуса электродвигателя АС. На фланце по радиусу расположены сквозные крепежные отверстия S без резьбы. Также, на фланце имеется круглый центрирующий выступ для правильной ориентации двигателя в конечном устройстве.
На фланце по радиусу расположены сквозные крепежные отверстия S без резьбы. Также, на фланце имеется круглый центрирующий выступ для правильной ориентации двигателя в конечном устройстве.
Большой фланец позволяет закреплять монтируемый электродвигатель со стороны корпуса – в этом основное назначение такого вида крепления. Благодаря наличию центрирующего выступа, крепление с помощью большого фланца используется в тех механизмах, где требуется повышенная точность взаимного ориентирования двигатели и нагрузки.
Конструктивное исполнение IMB14 (электродвигатели с малым фланцем)
Малый фланец электродвигателя – это тоже плоская круглая опорная поверхность электродвигатели со стороны вала, на которой по радиусу расположены крепежные отверстия. У малого фланца, в отличии от большого, диаметр Р меньше, либо равен диаметру (ширине) корпуса электродвигателя АС. На малом фланце по радиусу расположены резьбовые крепежные отверстия S, и аналогично большому, на малом фланце есть круглый центрирующий выступ.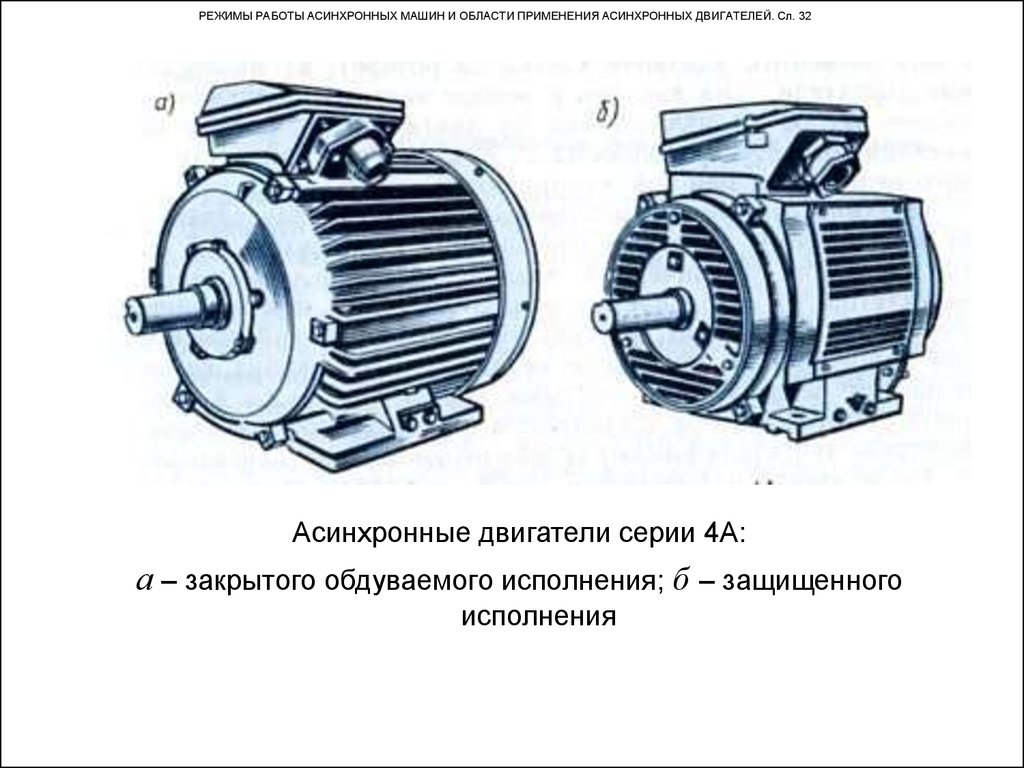
Малый фланец позволяет закреплять монтируемый электродвигатель со стороны конечного устройства, в которое устанавливается двигатель. Центрирующий выступ обеспечивает повышенную точность взаимного положения двигатели и нагрузки.
Комбинированное исполнение IMB34 (электродвигатели на лапах и с малым фланцем) и IMB35 (электродвигатели на лапах и с большим фланцем)
Очевидно, что комбинированное исполнение – это конструктивное исполнение, включающие в себя фланец и лапы.
Комбинированные исполнения часто используются в небольших насосах и промышленных вентиляторах. Для комбинированных исполнений характерно крепление корпуса нагрузки к двигателю посредством фланца, а двигатель, в свою очередь, крепиться к опорной поверхности с помощью лап. То есть, корпус двигателя становиться несущей конструкцией всего агрегата. Также, комбинированные крепления используются там, где требуется повышенная жесткость и прочность конструкции, так как лапы и фланец обеспечивают двойное крепление.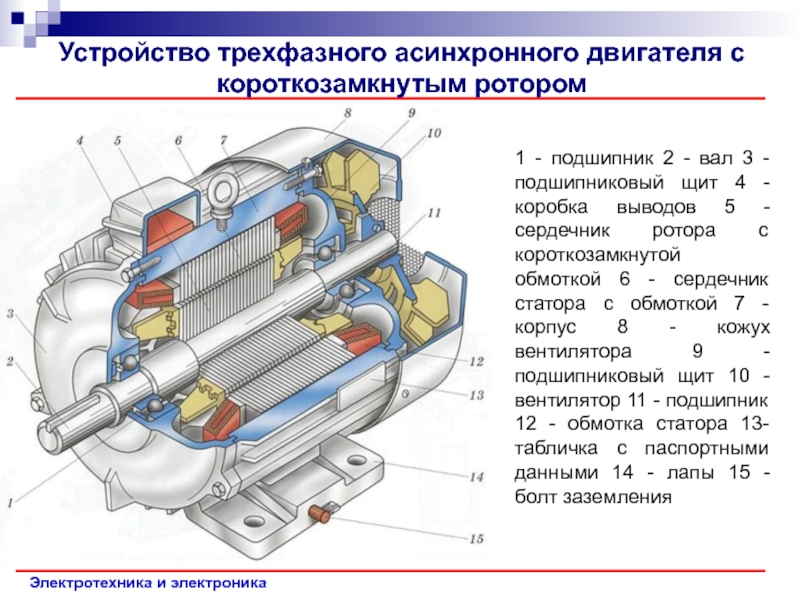
Пространственное положение электродвигателей
Другие конструктивные исполнения электродвигателей отличаются от IMB3, IMB5, IMB14, IMB35 и IMB34 только пространственным положением двигателя. Например, IMV6 – это электродвигатель на лапах, но опорная поверхность и ось вала двигателя располагается вертикально. В IMB6 опорная поверхность вертикальная, а ось расположена горизонтально. Небольшие электродвигатели можно устанавливать в любом пространственном положении.
Электродвигатели же большой мощности произвольно ориентировать в пространстве нельзя. Например, если предназначенный для горизонтальной установки двигатель большой мощности монтировать с вертикальной ориентацией вала, то из-за значительного веса ротора и осевой нагрузки могут быть повреждены подшипники. Поэтому, для двигателя вертикальной ориентации могут потребоваться усиленные подшипники. Также, у мощных электродвигателей не используют конструктивное исполнение с малым фланцем, так как резьба во фланце может не выдержать большой вес двигателя. При заказе мощных электродвигателей необходимо оговаривать пространственную ориентацию двигателя и конструктивную схему исполнения.
При заказе мощных электродвигателей необходимо оговаривать пространственную ориентацию двигателя и конструктивную схему исполнения.
Проектирование асинхронных двигателей – Пульников ЕС
Нажмите на любой из разделов ниже, чтобы развернуть его содержание.
Предлагаем
-> полный комплект технической документации на всю серию асинхронных двигателей класса Premium Efficiency (IE3) мощностью от 0,06кВт до 400кВт для сетевого напряжения 400В и числа полюсов 2 , 4, 6 и 8
-> полный комплект технической документации на всю серию асинхронных электродвигателей класса Super Premium Efficiency (IE4) мощностью от 0,06кВт и до 400кВт на линейное напряжение 400В и количество полюса 2, 4, 6 и 8
-> полный комплект технической документации на всю серию асинхронных двигателей с ультравысокой эффективностью (IE5) мощностью от 0,06кВт до 400кВт на линейное напряжение 400В и число полюсов 2, 4, 6 и 8
Подробное описание можно найти на соответствующих страницах для IE3, IE4 и IE5 в разделе «Продукты» выше. Нашей технической документации достаточно для запуска производства соответствующей серии.
Нашей технической документации достаточно для запуска производства соответствующей серии.
Экспериментальная проверка наших инструментов проектирования
1) на 2-х полюсные асинхронные машины со всеми нормативными выходными мощностями в диапазоне от 0,09кВт до 355кВт;
2) на 4-х полюсные асинхронные машины со всеми нормативными выходными мощностями в диапазоне от 0,06кВт до 355кВт;
3) на 6-полюсные асинхронные машины со всеми нормативными выходными мощностями в диапазоне от 0,18кВт до 250кВт;
4) на 8-полюсные асинхронные машины со всеми нормативными выходными мощностями в диапазоне от 0,25кВт до 200кВт;
Соответствие наших средств проектирования двигателей стандартам
Мы гарантируем соответствие наших конструкций двигателей стандарту IEC/EN 60034-30-1: 2014. Пусковой момент наших двигателей также соответствует требованиям IEC.
Регулируемость наших конструкций двигателей
-> мы готовы адаптировать наши конструкции в соответствии с техническими требованиями заказчика
-> мы готовы модифицировать конструкции конкретных компонентов и распространить эти изменения на всю серию;
Наш процесс проектирования
Видео с описанием нашего процесса проектирования
Исходные данные для нашего процесса проектирования
Количество фаз (например, 3)
Номинальная мощность (например, 15 кВт)
Номинальное напряжение сети (например, 380 В)
Частота источника питания (например, 50 Гц)
Синхронная скорость вращения (например, 1500 об/мин)
Международная защита (например, IP54)
Разработанные средства проектирования позволяют выбрать стратегию проектирования. Это может быть, например, определенный класс эффективности. Коэффициент начального и максимального крутящего момента задается в соответствии со стандартами IEC.
Это может быть, например, определенный класс эффективности. Коэффициент начального и максимального крутящего момента задается в соответствии со стандартами IEC.
Шаги расчета, встроенные в наши средства проектирования
1) автоматическое определение оптимальных размеров двигателя для заданной высоты оси вращения, а именно: наружный и внутренний диаметры статора, величина воздушного зазора, активная длина статора, размеры пазов статора и ротора;
2) автоматическое определение оптимального количества пазов статора и ротора, оптимального числа витков в обмотке статора, сечения провода в обмотке статора, а также конструкции статора и обмотки статора схема;
3) автоматическое электромагнитное моделирование двигателя и оценка тока холостого хода;
4) автоматическое определение параметров схемы замещения двигателя, оценка коэффициента мощности на номинальную нагрузку, расчет ТТХ двигателя;
5) автоматический расчет потерь и КПД двигателя;
6) автоматический расчет пусковых характеристик двигателя с учетом скин-эффектов и насыщения магнитопровода двигателя;
7) автоматическое проектирование и расчет вентиляционного контура двигателя;
8) автоматический тепловой расчет двигателя;
Рабочие характеристики
В этом разделе мы представляем типичный набор рабочих характеристик наших инструментов проектирования для одной из наших разработок.
Расчет оптимизации
Наши инструменты проектирования включают в себя предыдущие успешные проекты и тщательно настроены для достижения заданных целей проектирования. Наши методы проектирования и стратегии оптимизации проверены многолетним опытом и реальными испытаниями. Однако, если по запросу заказчика цели проектирования будут изменены, мы можем соответствующим образом скорректировать наши инструменты проектирования. Дополнительно можно ввести ограниченную оптимизацию выбранного набора параметров асинхронных двигателей.
Термический анализ
Термический анализ основан на сложной эквивалентной тепловой схеме и теории графов.
Базовая схема нашего процесса проектирования
Возможности наших инструментов проектирования
Наше программное обеспечение для проектирования позволяет разрабатывать асинхронные двигатели в соответствии с любым предварительно выбранным уровнем эффективности: EN 60034-30-1: 2014
IE4 — эффективность Super Premium согласно IEC/EN 60034-30-1: 2014
IE5 – перспективный стандарт эффективности (снижение потерь на 20% по сравнению с IE4)
Мы используем наши инструменты для проектирования серии асинхронных двигателей в соответствии с IE3 или IE4 в диапазоне мощностей от 0,12 кВт до 400 кВт для напряжение сети 400 В.
Мы можем разработать асинхронные двигатели в соответствии с любым из следующих исполнений: IP54, IP55 или IP23. Мы можем проектировать асинхронные двигатели на линейное напряжение свыше 1000 В и мощностью свыше 400 кВт и до 10 МВт.
Проверка наших инструментов проектирования
Наши инструменты проектирования показывают хорошее соответствие экспериментальным данным. Если мы введем в инструменты проектирования геометрию существующего двигателя, мы получим хорошее совпадение с измеренными характеристиками и наблюдаемыми температурами.
Ниже вы найдете несколько расчетов с использованием наших инструментов проектирования для существующих асинхронных машин и сравнение с данными измерений.
Пример проверки №. 1: Асинхронный двигатель 4A112M4
Технические характеристики 4A112M4
| Значение | Данные и размеры из каталога | Наше программное обеспечение для проектирования |
|---|---|---|
| Номинальная полезная мощность [кВт] | 5,5 | 5,5 |
| Синхронная скорость [об/мин] | 1500 | 1500 |
| Количество полюсов | 4 | 4 |
| Номинальное напряжение сети [В] | 380 | 380 |
| Частота [Гц] | 50 | 50 |
| Количество фаз | 3 | 3 |
| Соединение фаз | Д | Д |
| Номинальный крутящий момент [Нм] | 36,322 | 36,309 |
| Сопротивление фазы при 20°C [Ом] | 0,995 | 0,987 |
| Скорость вращения при номинальной нагрузке [об/мин] | 1446 | 1446,5 |
| Номинальное скольжение [%] | 3,6 | 3,57 |
| Номинальный ток [А] | 11,498 | 11,016 |
| КПД при 50 % нагрузки [%] | 86,5 | 84,9 |
| КПД при 75% нагрузки [%] | 86,5 | 85,7 |
| КПД при 100 % нагрузки [%] | 85,5 | 84,8 |
| Коэффициент мощности | 0,85 | 0,85 |
Отношение пускового момента к номинальному [о. е.] е.] | 2 | 2,009 |
| Отношение максимального крутящего момента к номинальному [о.е.] | 2,2 | 2,356 |
| Отношение пускового тока к номинальному [о.е.] | 7 | 6,07 |
| Критическое скольжение [у.е.] | 25 | 20,2 |
| Ток холостого хода [A] | 3,956 | |
| Плотность потока в воздушном зазоре [Тл] | 0,85 | 0,842 |
| Потери в обмотке статора [Вт] | 497,338 | |
| Потери в клетке ротора [Вт] | 208,893 | |
| Потери в стали [Вт] | 191,402 | |
| Механические потери [Вт] | 29,221 | |
| Дополнительные потери при нагрузке [Вт] | 32,307 | |
| Общие потери [Вт] | 932,749 | 958.161 |
| пр. t° обмотки статора при температуре окружающей среды t°= 40°С, °С | 113,5 | 113 |
Пример проверки №. 2: Асинхронный двигатель 4A132M6
2: Асинхронный двигатель 4A132M6
Технические данные для 4A132M6
| Значение | Данные и размеры из каталога | 15 Наше программное обеспечение для проектирования |
|---|---|---|
| Номинальная полезная мощность [кВт] | 7,5 | 7,5 |
| Синхронная скорость [об/мин] | 1000 | 1000 |
| Количество полюсов | 6 | 6 |
| Номинальное напряжение сети [В] | 380 | 380 |
| Частота [Гц] | 50 | 50 |
| Количество фаз | 3 | 3 |
| Соединение фаз | Д | Д |
| Номинальный крутящий момент [Нм] | 73,987 | 73,951 |
| Сопротивление фазы при 20°C [Ом] | 0,646 | 0,645 |
| Скорость вращения при номинальной нагрузке [об/мин] | 968 | 968,5 |
| Номинальное скольжение [%] | 3,2 | 3,15 |
| Номинальный ток [А] | 16,454 | 15,737 |
| КПД при 50 % нагрузки [%] | 84 | 83,2 |
| КПД при 75% нагрузки [%] | 85 | 84,9 |
| КПД при 100 % нагрузки [%] | 85,5 | 84,7 |
| Коэффициент мощности | 0,81 | 0,805 |
Отношение пускового момента к номинальному [о. е.] е.] | 2 | 2,206 |
| Отношение максимального крутящего момента к номинальному [о.е.] | 2,5 | 2,8 |
| Отношение пускового тока к номинальному [о.е.] | 6 | 6.106 |
| Критическое скольжение [у.е.] | 26 | 22,8 |
| Ток холостого хода [A] | 7,499 | |
| Плотность потока в воздушном зазоре [Тл] | 0,87 | 0,872 |
| Потери в обмотке статора [Вт] | 611,545 | |
| Потери в клетке ротора [Вт] | 251,509 | |
| Потери в стали [Вт] | 313.868 | |
| Механические потери [Вт] | 29,933 | |
| Дополнительные потери при нагрузке [Вт] | 43,732 | |
| Общие потери [Вт] | 1271,93 | 1250,587 |
| пр. t° обмотки статора при температуре окружающей среды t°= 40°С, °С | 105 | 111,4 |
пр.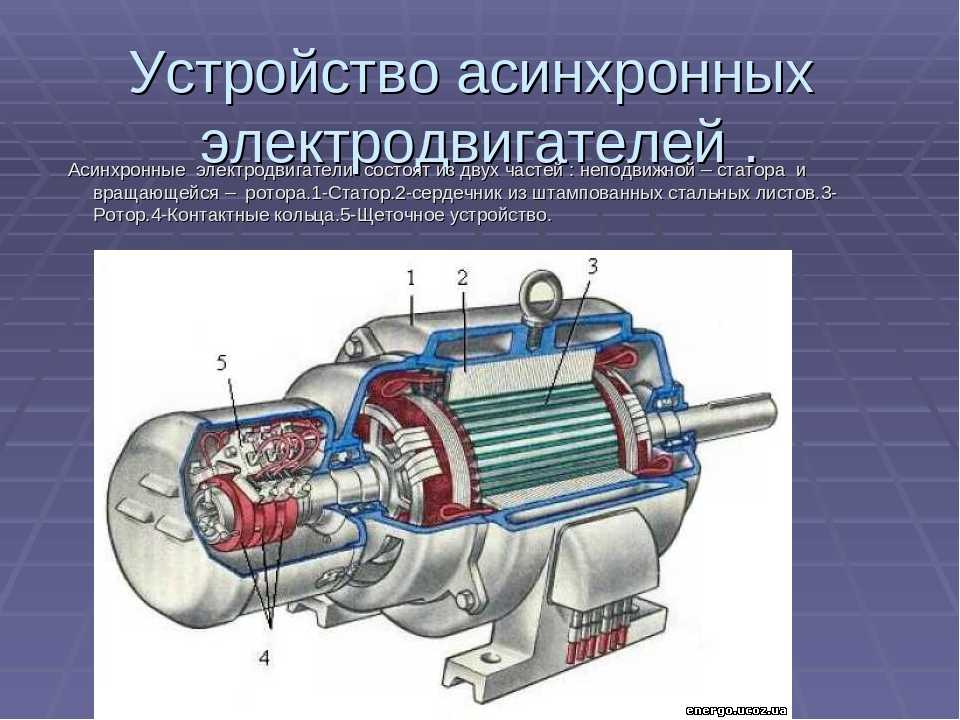 t° корпуса при t° = 40°C, °C t° корпуса при t° = 40°C, °C | 77 | 75,1 |
Проверка с конечными элементами
Целью данного шага является подтверждение заказчику рабочих характеристик предложенной конструкции двигателя. Каждая конструкция двигателя, которую мы поставляем, проверяется с помощью инструментов конечных элементов в полностью автоматизированном режиме.
Техническая документация
Мы можем спроектировать и разработать все компоненты, необходимые для двигателя, а также предоставить чертежи и сопроводительную документацию. Мы можем предоставить как сборочные чертежи, так и чертежи конкретных компонентов. Если клиент хочет повторно использовать некоторые из имеющихся у него деталей, мы можем соответствующим образом изменить наш дизайн.
Дополнительные услуги по проектированию асинхронных двигателей
Выполняем механический анализ валов, корпусов, подшипниковых щитов. Можно оценить механические силы, действующие на обмотку статора при пуске двигателя.
Можно оценить механические силы, действующие на обмотку статора при пуске двигателя.
Двигатели переменного тока | Конструкция машины
Синхронные и синхронные двигатели представляют собой две основные категории двигателей переменного тока. Асинхронный двигатель является распространенной формой асинхронного двигателя и в основном представляет собой трансформатор переменного тока с вращающейся вторичной обмоткой. Первичная обмотка (статор) подключена к источнику питания, а короткозамкнутая вторичная обмотка (ротор) несет индуцированный вторичный ток. Крутящий момент создается действием роторных (вторичных) токов на поток в воздушном зазоре. Синхронный двигатель сильно отличается по конструкции и эксплуатационным характеристикам и считается отдельным классом двигателей.
Асинхронные двигатели: Асинхронные двигатели являются самыми простыми и наиболее прочными электродвигателями и состоят из двух основных электрических узлов: обмотки статора и узла ротора. Асинхронный двигатель получил свое название от токов, протекающих во вторичном элементе (роторе), которые индуцируются переменными токами, протекающими в первичном элементе (статоре). Комбинированные электромагнитные эффекты токов статора и ротора создают силу, создающую вращение.
Асинхронный двигатель получил свое название от токов, протекающих во вторичном элементе (роторе), которые индуцируются переменными токами, протекающими в первичном элементе (статоре). Комбинированные электромагнитные эффекты токов статора и ротора создают силу, создающую вращение.
Роторы обычно состоят из многослойного цилиндрического железного сердечника с прорезями для размещения проводников. Наиболее распространенный тип ротора имеет литые алюминиевые проводники и короткозамыкающие концевые кольца. Эта «беличья клетка» вращается, когда движущееся магнитное поле индуцирует ток в закороченных проводниках. Скорость, с которой вращается магнитное поле, является синхронной скоростью двигателя и определяется числом полюсов в статоре и частотой источника питания: n с = 120 f / p , где n с = синхронная скорость, f = частота и p = число полюсов.
Синхронная скорость — это абсолютный верхний предел скорости двигателя. Если ротор вращается точно так же быстро, как вращающееся магнитное поле, то никакие силовые линии не пересекаются проводниками ротора, и крутящий момент равен нулю. При работе ротор всегда вращается медленнее, чем магнитное поле. Скорость ротора достаточно мала, чтобы обеспечить протекание надлежащего количества тока ротора, так что результирующий крутящий момент достаточен для преодоления потерь на сопротивление ветру и трения и для управления нагрузкой. Разница скоростей между ротором и магнитным полем, называемая скольжением, обычно выражается в процентах от синхронной скорости: S = 100 ( N S — N A )/ N S , где S = Slip, N , S = Slip, N ,
Если ротор вращается точно так же быстро, как вращающееся магнитное поле, то никакие силовые линии не пересекаются проводниками ротора, и крутящий момент равен нулю. При работе ротор всегда вращается медленнее, чем магнитное поле. Скорость ротора достаточно мала, чтобы обеспечить протекание надлежащего количества тока ротора, так что результирующий крутящий момент достаточен для преодоления потерь на сопротивление ветру и трения и для управления нагрузкой. Разница скоростей между ротором и магнитным полем, называемая скольжением, обычно выражается в процентах от синхронной скорости: S = 100 ( N S — N A )/ N S , где S = Slip, N , S = Slip, N ,
, , , , , , , , , , , , , , , , , а ,
. = фактическая скорость.
Многофазные двигатели: Многофазные двигатели с короткозамкнутым ротором в основном представляют собой машины с постоянной скоростью, но некоторая степень гибкости рабочих характеристик является результатом изменения конструкции пазов ротора. Эти изменения вызывают изменения крутящего момента, тока и скорости при полной нагрузке. Эволюция и стандартизация привели к четырем основным типам двигателей.
Эти изменения вызывают изменения крутящего момента, тока и скорости при полной нагрузке. Эволюция и стандартизация привели к четырем основным типам двигателей.
Исполнения A и B: Двигатели общего назначения с нормальным пусковым моментом и током и малым скольжением. Многофазные двигатели с дробной мощностью, как правило, имеют конструкцию B. Из-за падающих характеристик конструкции B многофазный двигатель, который производит такой же пробивной (максимальный) крутящий момент, как и однофазный двигатель, не может достичь той же точки скорость-момент для скорости с полной нагрузкой. как однофазный двигатель. Следовательно, опрокидывающий момент должен быть выше (минимум 140 % от опрокидывающего момента однофазного двигателя общего назначения), чтобы скорости при полной нагрузке были сопоставимы.
Исполнение C: Высокий пусковой момент при нормальном пусковом токе и низком скольжении. Эта конструкция обычно используется при высоких пусковых нагрузках при пуске, но обычно работает при номинальной полной нагрузке и не требует высоких перегрузок после достижения рабочей скорости.
Исполнение D: Высокое скольжение, очень высокий пусковой момент, низкий пусковой ток и низкая скорость при полной нагрузке. Из-за высокого проскальзывания скорость может падать при воздействии меняющихся нагрузок. Эта конструкция подразделяется на несколько групп, которые различаются по проскальзыванию или форме кривой скорость-момент.
Исполнение F: Низкий пусковой момент, малый пусковой ток и малое скольжение. Эта конструкция предназначена для получения низкого тока при заторможенном роторе. И заблокированный ротор, и пробивной крутящий момент низки. Обычно используется при низком пусковом крутящем моменте и отсутствии высоких перегрузок после достижения рабочей скорости.
Двигатели с фазным ротором: Двигатели с короткозамкнутым ротором относительно негибкие в отношении характеристик скорости и крутящего момента, но специальная версия с фазным ротором имеет регулируемую скорость и крутящий момент. Применение двигателей с фазным ротором заметно отличается от двигателей с короткозамкнутым ротором из-за доступности цепи ротора. Рабочие характеристики получаются путем введения различных значений сопротивления в цепь ротора.
Применение двигателей с фазным ротором заметно отличается от двигателей с короткозамкнутым ротором из-за доступности цепи ротора. Рабочие характеристики получаются путем введения различных значений сопротивления в цепь ротора.
Двигатели с фазным ротором обычно запускаются с помощью вторичного сопротивления в цепи ротора. Сопротивление последовательно уменьшается, чтобы позволить двигателю набрать скорость. Таким образом, двигатель может развивать значительный крутящий момент при ограничении тока заторможенного ротора. Это вторичное сопротивление может быть рассчитано на непрерывную работу для отвода тепла, выделяемого при непрерывной работе на пониженной скорости, частом ускорении или ускорении с большой инерционной нагрузкой. Внешнее сопротивление придает двигателю характеристику, которая приводит к большому падению оборотов при относительно небольшом изменении нагрузки. Пониженная скорость обеспечивается примерно до 50% номинальной скорости, но эффективность низкая.
Многоскоростные двигатели: Двигатели с последовательным расположением полюсов рассчитаны на одну скорость. Физически повторно подключив провода, можно получить соотношение скоростей 2:1. Типичные синхронные скорости для двигателя 60 Гц: 3600/1800 об/мин (2/4 полюса), 1800/900 об/мин (4/8 полюса) и 1200/600 об/мин (6/12 полюсов).
Физически повторно подключив провода, можно получить соотношение скоростей 2:1. Типичные синхронные скорости для двигателя 60 Гц: 3600/1800 об/мин (2/4 полюса), 1800/900 об/мин (4/8 полюса) и 1200/600 об/мин (6/12 полюсов).
Двигатели с двумя обмотками имеют две отдельные обмотки, которые можно наматывать для любого числа полюсов, чтобы можно было получить другие соотношения скоростей. Однако соотношение больше 4:1 нецелесообразно из-за размера и веса двигателя. Однофазные многоскоростные двигатели обычно имеют конструкцию с переменным крутящим моментом, но доступны двигатели с постоянным крутящим моментом и постоянной мощностью.
Выходная мощность многоскоростных двигателей может быть пропорциональна каждой скорости. Эти двигатели рассчитаны на выходную мощность в лошадиных силах в соответствии с одной из следующих характеристик нагрузки.
Переменный крутящий момент: Двигатели имеют характеристику крутящего момента, которая зависит от квадрата скорости. Например, двигатель на 1800/900 об/мин, который развивает 10 л.с. при 1800 об/мин, производит 2,5 л.с. при 900 об/мин. Поскольку для некоторых нагрузок, таких как центробежные насосы, вентиляторы и воздуходувки, требуемый крутящий момент изменяется пропорционально квадрату или кубу скорости, эта характеристика двигателя обычно является адекватной.
Например, двигатель на 1800/900 об/мин, который развивает 10 л.с. при 1800 об/мин, производит 2,5 л.с. при 900 об/мин. Поскольку для некоторых нагрузок, таких как центробежные насосы, вентиляторы и воздуходувки, требуемый крутящий момент изменяется пропорционально квадрату или кубу скорости, эта характеристика двигателя обычно является адекватной.
Постоянный крутящий момент: Эти двигатели могут развивать одинаковый крутящий момент на каждой скорости, поэтому выходная мощность напрямую зависит от скорости. Например, двигатель мощностью 10 л.с. при 1800 об/мин производит 5 л.с. при 900 об/мин. Эти двигатели используются в приложениях с требованиями к постоянному крутящему моменту, таких как смесители, конвейеры и компрессоры.
Постоянная мощность: Эти двигатели развивают одинаковую мощность на каждой скорости, а крутящий момент обратно пропорционален скорости. Типичные области применения включают станки, такие как сверла, токарные станки и фрезерные станки.
Однофазные двигатели: Однофазные асинхронные двигатели обычно имеют дробную мощность, хотя однофазные двигатели с интегральной мощностью доступны в более низком диапазоне мощности. Наиболее распространенными однофазными двигателями с дробной мощностью являются двигатели с расщепленной фазой, конденсаторным пуском, постоянным разделенным конденсатором и экранированным полюсом.
Двигатели бывают многоскоростными, но существует практическое ограничение на количество получаемых скоростей. Доступны двух-, трех- и четырехскоростные двигатели, а выбор скорости может быть выполнен последовательно-полюсным или двухобмоточным методом.
Однофазные двигатели вращаются в том направлении, в котором они были запущены; и они запускаются в заданном направлении в соответствии с электрическими соединениями или механическими настройками пусковых средств. Двигатели общего назначения могут работать в любом направлении, но стандартное вращение — против часовой стрелки, если смотреть на конец, противоположный приводному валу. Двигатели могут быть повторно подключены для изменения направления вращения.
Двигатели могут быть повторно подключены для изменения направления вращения.
Универсальные двигатели: Универсальные двигатели работают с почти одинаковыми характеристиками при постоянном или переменном токе до 60 Гц. Он отличается от двигателя постоянного тока коэффициентами обмотки и более тонкими металлическими пластинами. Двигатель постоянного тока работает на переменном токе, но с низким КПД. Универсальный двигатель может работать на постоянном токе с практически эквивалентными характеристиками переменного тока, но с меньшей коммутацией и меньшим сроком службы щеток, чем у эквивалентного последовательного двигателя постоянного тока.
Важной характеристикой универсального двигателя является то, что он имеет самое высокое отношение мощности к фунту среди всех двигателей переменного тока, поскольку он может работать на скоростях, во много раз превышающих скорость любого другого двигателя с частотой 60 Гц.
При работе без нагрузки универсальный двигатель имеет тенденцию разгоняться, скорость ограничивается только ветром, трением и коммутацией. Поэтому большие универсальные двигатели почти всегда подключаются напрямую к нагрузке для ограничения скорости. На переносных инструментах, таких как электрические пилы, нагрузка, создаваемая шестернями, подшипниками и охлаждающим вентилятором, достаточна для удержания скорости холостого хода на безопасном уровне.
Поэтому большие универсальные двигатели почти всегда подключаются напрямую к нагрузке для ограничения скорости. На переносных инструментах, таких как электрические пилы, нагрузка, создаваемая шестернями, подшипниками и охлаждающим вентилятором, достаточна для удержания скорости холостого хода на безопасном уровне.
С универсальным двигателем управление скоростью осуществляется просто, поскольку скорость двигателя чувствительна к изменениям как напряжения, так и потока. С помощью реостата или регулируемого автотрансформатора скорость двигателя можно легко изменить от максимальной скорости до нуля.
Синхронные двигатели: Синхронные двигатели по своей природе являются двигателями с постоянной скоростью и работают в абсолютной синхронизации с частотой сети. Как и в асинхронных двигателях с короткозамкнутым ротором, скорость определяется количеством пар полюсов и всегда является отношением к частоте сети.
Синхронные двигатели изготавливаются в размерах от субфракционных двигателей с автовозбуждением до двигателей большой мощности с возбуждением постоянным током для промышленных приводов. В диапазоне долей мощности синхронные двигатели используются в основном там, где требуется точная постоянная скорость.
В диапазоне долей мощности синхронные двигатели используются в основном там, где требуется точная постоянная скорость.
Синхронные двигатели большой мощности, используемые для промышленных нагрузок, выполняют две важные функции. Во-первых, это высокоэффективное средство преобразования энергии переменного тока в механическую энергию. Во-вторых, он может работать с опережающим или единичным коэффициентом мощности, тем самым обеспечивая коррекцию коэффициента мощности.
Существует два основных типа синхронных двигателей: без возбуждения и с возбуждением от постоянного тока.
Двигатели без возбуждения изготавливаются в реактивном и гистерезисном исполнении. Эти двигатели используют схему самозапуска и не требуют внешнего источника возбуждения.
Двигатели с возбуждением постоянным током имеют мощность более 1 л.с. и требуют для возбуждения постоянного тока, подаваемого через токосъемные кольца. Постоянный ток может подаваться от отдельного источника или от генератора постоянного тока, непосредственно соединенного с валом двигателя.
Однофазные или многофазные синхронные двигатели не могут запускаться без привода или без подключения ротора в виде цепи самозапуска. Поскольку поле вращается с синхронной скоростью, двигатель должен быть ускорен, прежде чем он сможет войти в синхронизм. Ускорение с нулевой скорости требует проскальзывания до достижения синхронизма. Поэтому необходимо использовать отдельные пусковые средства.
В конструкциях с автоматическим пуском, типоразмеров fhp используются методы пуска, общие для асинхронных двигателей (расщепленная фаза, пуск с конденсатором, пуск с отталкиванием и пуск с экранированным полюсом). Электрические характеристики этих двигателей заставляют их автоматически переключаться в синхронный режим.
Хотя двигатель с возбуждением постоянным током имеет короткозамкнутую обмотку для пуска, называемую амортизирующей или демпферной обмоткой, присущий ему низкий пусковой момент и потребность в источнике питания постоянного тока требуют системы пуска, обеспечивающей полную защиту двигателя при пуске, применяется постоянный ток. возбуждение поля в нужное время, устраняет возбуждение поля при вытягивании ротора (максимальный крутящий момент) и защищает короткозамкнутую обмотку от теплового повреждения в условиях асинхронности.
возбуждение поля в нужное время, устраняет возбуждение поля при вытягивании ротора (максимальный крутящий момент) и защищает короткозамкнутую обмотку от теплового повреждения в условиях асинхронности.
Тяговый крутящий момент — это минимальный крутящий момент, развиваемый от состояния покоя до точки втягивания. Этот крутящий момент должен превышать крутящий момент нагрузки с достаточным запасом, чтобы поддерживать удовлетворительную скорость ускорения при нормальных условиях напряжения.
Реактивный крутящий момент возникает из-за заметности (предпочтительного направления намагниченности) полюсных наконечников ротора и пульсирует на скоростях ниже синхронной. Это также влияет на пусковой и тяговый моменты двигателя, поскольку невозбужденный явнополюсный ротор имеет тенденцию выравниваться с магнитным полем статора для поддержания минимального магнитного сопротивления. Этого реактивного крутящего момента может быть достаточно для приведения в синхронизм малонагруженной малоинерционной системы и для развития примерно 30-процентного тягового крутящего момента.
Синхронный крутящий момент — это крутящий момент, развиваемый после подачи возбуждения, который представляет собой общий установившийся крутящий момент, доступный для привода нагрузки. Он достигает максимума примерно при отставании ротора от магнитного поля вращающегося статора примерно на 70°. Это максимальное значение фактически является моментом отрыва.
Момент выдергивания — это максимальный устойчивый крутящий момент, который двигатель развивает на синхронной скорости в течение одной минуты при номинальной частоте и нормальном возбуждении. Нормальный момент отрыва обычно составляет 150% от момента полной нагрузки для двигателей с единичным коэффициентом мощности и от 175 до 200% для двигателей с опережающим коэффициентом мощности 0,8.
Втягивающий момент синхронного двигателя – это крутящий момент, который он развивает при втягивании подключенной к нему инерционной нагрузки в синхронизм при приложении возбуждения. Втягивающий момент развивается при переходе от скорости проскальзывания к синхронной скорости, когда двигатель переключается с асинхронного режима на синхронный. Обычно это самый критический период при запуске синхронного двигателя. Моменты, развиваемые амортизирующей обмоткой и обмоткой возбуждения, при синхронной скорости обращаются в нуль. Таким образом, в точке втягивания действуют только реактивный момент и синхронизирующий момент, обеспечиваемые возбуждением обмоток возбуждения.
Обычно это самый критический период при запуске синхронного двигателя. Моменты, развиваемые амортизирующей обмоткой и обмоткой возбуждения, при синхронной скорости обращаются в нуль. Таким образом, в точке втягивания действуют только реактивный момент и синхронизирующий момент, обеспечиваемые возбуждением обмоток возбуждения.
Синхронизирующие двигатели: Синхронизирующие двигатели имеют номинальную мощность менее 1/10 л.с. и используются в качестве первичных двигателей для синхронизирующих устройств. Поскольку двигатель используется в качестве таймера, он должен работать с постоянной скоростью.
Двигатели переменного и постоянного тока могут использоваться в качестве синхронизирующих двигателей. Синхронизирующие двигатели постоянного тока используются для портативных устройств или там, где требуется высокое ускорение и низкие изменения скорости. Преимущества включают пусковой крутящий момент, в десять раз превышающий рабочий крутящий момент, эффективность от 50 до 70% и относительно простое управление скоростью. Но требуется какая-то форма регулятора скорости, механическая или электронная.
Но требуется какая-то форма регулятора скорости, механическая или электронная.
Двигатели переменного тока используют легкодоступную мощность, они дешевле, имеют увеличенный срок службы и не генерируют радиочастотные помехи. Однако двигатели переменного тока не могут быть легко адаптированы для портативных устройств, имеют относительно низкий пусковой момент и гораздо менее эффективны, чем двигатели постоянного тока.
Серводвигатели переменного тока: Серводвигатели переменного тока используются в сервомеханизмах переменного тока и компьютерах, которые требуют быстрого и точного отклика. Для получения этих характеристик серводвигатели имеют высокоомные роторы малого диаметра. Небольшой диаметр обеспечивает низкую инерцию для быстрых пусков, остановок и реверсов, а высокое сопротивление обеспечивает почти линейное соотношение скорости и крутящего момента для точного управления.
Серводвигатели намотаны с двумя фазами физически под прямым углом или в пространственной квадратуре.