Содержание
Трехфазный инвертор для асинхронного двигателя
Сегодня асинхронные двигатели являются основными тяговыми приводами для станков, конвейеров, и прочих промышленных агрегатов. Для того чтобы моторы могли нормально функционировать, им нужен частотный преобразователь. Он позволяет оптимизировать работу агрегата и продлить срок его службы. Покупать устройство необязательно — частотник для трехфазного электродвигателя можно сделать своими руками. Асинхронный электродвигатель может работать и без частотника, но в этом случае у него будет постоянная скорость без возможности регулировки. Для нивелирования всех вышеперечисленных негативных факторов были изобретены преобразователи частоты для асинхронных двигателей трехфазного и однофазного тока.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.

По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Частотный преобразователь (электропривод)
- Для чего нужен частотник и как сделать его своими руками для трехфазного электродвигателя
- Вы точно человек?
- Выбор частотного преобразователя по току, мощности и другим параметрам
- Частотные преобразователи для асинхронных двигателей
- Преобразователи частоты
- Частотные преобразователи для двигателей
- Частотный привод 5-200Гц (10-400Гц) своими руками
- Частотный преобразователь.
Разница между однофазным и трехфазным
 Разница между однофазным и трехфазным
Разница между однофазным и трехфазнымПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Трёхфазный инвертор на Arduino DUE. Работа асинхронного двигателя от солнечных батарей.
Частотный преобразователь (электропривод)
Ротор любого электродвигателя приводится в движение под действием сил, вызванных вращающимся электромагнитным полем внутри обмотки статора. Скорость его оборотов обычно определяется промышленной частотой электрической сети.
Ее стандартная величина в 50 герц подразумевает совершение пятидесяти периодов колебаний в течение одной секунды. Такое же число раз проворачивается ротор под воздействием приложенного электромагнитного поля. Если изменять величину частоты сети, приложенной к статору, то можно регулировать скорость вращения ротора и подключенного к нему привода. Этот принцип заложен в основу управления электродвигателями. Виды частотных преобразователей.
Этот принцип заложен в основу управления электродвигателями. Виды частотных преобразователей.
По конструкции частотные преобразователи бывают:. Асинхронные электродвигатели, выполненные по схеме с фазным ротором и запущенные в режим генератора, являются представителями первого вида. Они при работе обладают низким КПД и отмечаются маленькой эффективностью.
Поэтому они не нашли широкого применения в производстве и используются крайне редко. Способ электронного преобразования частоты позволяет плавно регулировать обороты как асинхронных, так и синхронных машин.
При этом может быть реализован один из двух принципов управления:. Первый способ является наиболее простым и менее совершенным, а второй используется для точного регулирования скоростей вращения ответственного промышленного оборудования. Особенности векторного управления частотным преобразованием. Алгоритмы для работы преобразователей по этому принципу создаются двумя способами:.
Первый метод основан на назначении определенной зависимости чередования последовательностей широтно-импульсной модуляции ШИМ инвертора для заранее подготовленных алгоритмов. При этом амплитуда и частота напряжения на выходе преобразователя регулируются по скольжению и нагрузочному току, но без использования обратных связей по скорости вращения ротора.
При этом амплитуда и частота напряжения на выходе преобразователя регулируются по скольжению и нагрузочному току, но без использования обратных связей по скорости вращения ротора.
Этим способом пользуются при управлении несколькими электродвигателями, подключенными параллельно к преобразователю частоты. Потокорегулирование подразумевает контроль рабочих токов внутри двигателя с разложением их на активную и реактивную составляющие и внесение корректив в работу преобразователя для выставления амплитуды, частоты и угла для векторов выходного напряжения.
Это позволяет повысить точность работы двигателя и увеличить границы его регулирования. Применение потокорегулирования расширяет возможности приводов, работающих на малых оборотах с большими динамическими нагрузками, такими как подъемные крановые устройства или намоточные промышленные станки.
Использование векторной технологии позволяет применять динамическую регулировку вращающихся моментов к трехфазным асинхронным двигателям.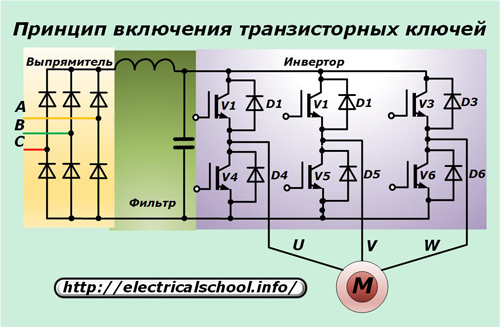
Схема замещения. Принципиальную упрощенную электрическую схему асинхронного двигателя можно представить следующим видом. На обмотки статора, обладающие активным R1 и индуктивным X1 сопротивлениями, приложено напряжение u1.
Оно, преодолевая сопротивление воздушного зазора Хв, трансформируется в обмотку ротора, вызывая в ней ток, который преодолевает ее сопротивление. Векторная диаграмма схемы замещения.
Ее построение помогает понять происходящие процессы внутри асинхронного двигателя. Энергия тока статора разделяется на две части:. Для бессенсорного управления измеряются:. По их значениям рассчитывают:. В алгоритм расчета уже заложили электронную эквивалентную схему асинхронного двигателя с регуляторами тока, в которой учтены условия насыщения электромагнитного поля и потерь магнитной энергии в стали. Обе этих составляющих векторов тока, отличающиеся по углу и амплитуде, вращаются совместно с системой координат ротора и пересчитываются в стационарную систему ориентации по статору.
По этому принципу подстраиваются параметры частотного преобразователя под нагрузку асинхронного двигателя. Принцип работы частотного преобразователя.
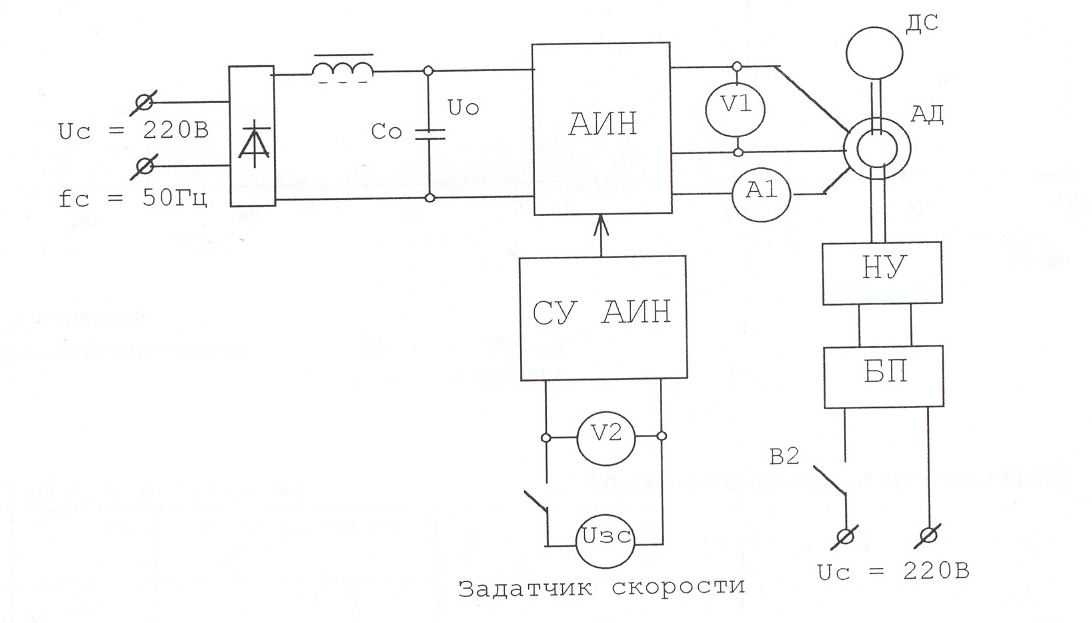
В основу этого устройства, которое еще называют инвертором, заложено двойное изменение формы сигнала питающей электрической сети. Вначале промышленное напряжение подается на силовой выпрямительный блок с мощными диодами, которые убирают синусоидальные гармоники, но оставляют пульсации сигнала. Для их ликвидации предусмотрена батарея конденсаторов с индуктивностью LC-фильтр , обеспечивающая стабильную, сглаженную форму выпрямленному напряжению.
Затем сигнал поступает на вход преобразователя частоты, который представляет собой мостовую трехфазную схему из шести силовых транзисторов серии IGBT или MOSFET с диодами защиты от пробоя напряжений обратной полярности. Используемые ранее для этих целей тиристоры не обладают достаточным быстродействием и работают с большими помехами. Такой прием позволяет убирать генерируемое двигателем напряжение для защиты конденсаторов фильтра от перезарядки и выхода из строя.
Способ векторного управления частотой преобразователя позволяет создавать схемы, осуществляющие автоматическое регулирование сигнала системами САР. Для этого используется система управления:. ШИМ широтного импульсного моделирования. Метод амплитудного регулирования основан на изменении входного напряжения, а ШИМ — алгоритма переключений силовых транзисторов при неизменном напряжении входа.
При ШИМ регулировании создается период модуляции сигнала, когда обмотка статора подключается по строгой очередности к положительным и отрицательным выводам выпрямителя. Поскольку частота такта генератора довольно высокая, то в обмотке электродвигателя, обладающего индуктивным сопротивлением, происходит их сглаживание до синусоиды нормального вида. Способы ШИМ управления позволяют максимально исключить потери энергии и обеспечивают высокий КПД преобразования за счет одновременного управления частотой и амплитудой.
Они стали доступны благодаря развитию технологий управления силовыми запираемыми тиристорами серии GTO или биполярных марок транзисторов IGBT, обладающих изолированным затвором. Принципы их включения для управления трехфазным двигателем показаны на картинке.
Принципы их включения для управления трехфазным двигателем показаны на картинке.
Каждый из шести IGBT-транзисторов подключается по встречно-параллельной схеме к своему диоду обратного тока. При этом через силовую цепь каждого транзистора проходит активный ток асинхронного двигателя, а его реактивная составляющая направляется через диоды. Для ликвидации влияния внешних электрических помех на работу инвертора и двигателя в конструкцию схемы преобразователя частоты может включаться помехозащитный фильтр , ликвидирующий:.
Их возникновение сигнализирует контроллер, а для уменьшения воздействия используется экранированная проводка между двигателем и выходными клеммами инвертора. С целью улучшения точности работы асинхронных двигателей в схему управления частотных преобразователей включают:.
Эксплуатационные схемы подключения. Частотные преобразователи создаются для работы с однофазными или трехфазными сетями. Однако, если есть промышленные источники постоянного тока с напряжением вольт, то от них тоже можно запитывать инверторы.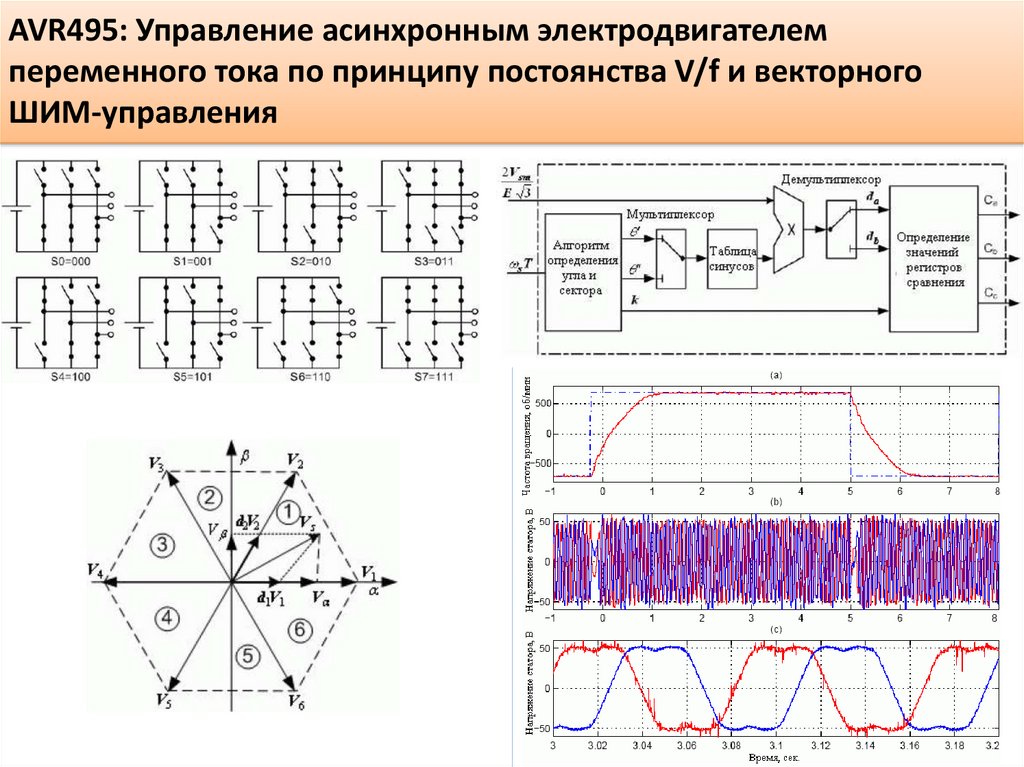 Трехфазные модели рассчитываются на напряжение сети вольт и выдают его на электродвигатель.
Трехфазные модели рассчитываются на напряжение сети вольт и выдают его на электродвигатель.
Однофазные же инверторы питаются от вольт и на выходе выдают три разнесенных по времени фазы. Схема подключения частотного преобразователя к двигателю может быть выполнена по схемам:. Выбирая способ подключения электрического двигателя к преобразователю частоты надо обращать внимание на соотношение мощностей, которые может создать работающий двигатель на всех режимах, включая медленный, нагруженный запуск, с возможностями инвертора.
Нельзя постоянно перегружать частотный преобразователь, а небольшой запас его выходной мощности обеспечит ему длительную и безаварийную работу. Искать в Школе для электрика:.
Для чего нужен частотник и как сделать его своими руками для трехфазного электродвигателя
С целью охраны окружающей среды везде вводятся правила, рекомендующие производителям электрооборудования выпускать продукцию, экономно расходующую электроэнергию. Зачастую это достигается эффективным управлением скорости электродвигателя. Частотник для трехфазного электродвигателя или частотный преобразователь имеет множество наименований: инвертор, преобразователь частоты переменного тока, частотно регулируемый привод. На сегодняшний день частотники производят многие фирмы, но есть немало энтузиастов, создающих преобразователи своими руками. Инвертор управляет скоростью вращения асинхронных электродвигателей, т.
Частотник для трехфазного электродвигателя или частотный преобразователь имеет множество наименований: инвертор, преобразователь частоты переменного тока, частотно регулируемый привод. На сегодняшний день частотники производят многие фирмы, но есть немало энтузиастов, создающих преобразователи своими руками. Инвертор управляет скоростью вращения асинхронных электродвигателей, т.
Данный частотник, а в дальнейшем частотный привод, способен управлять 3 -х фазным асинхронным двигателем. В данном частотном.
Вы точно человек?
Ротор любого электродвигателя приводится в движение под действием сил, вызванных вращающимся электромагнитным полем внутри обмотки статора. Скорость его оборотов обычно определяется промышленной частотой электрической сети. Ее стандартная величина в 50 герц подразумевает совершение пятидесяти периодов колебаний в течение одной секунды. Такое же число раз проворачивается ротор под воздействием приложенного электромагнитного поля. Если изменять величину частоты сети, приложенной к статору, то можно регулировать скорость вращения ротора и подключенного к нему привода. Этот принцип заложен в основу управления электродвигателями. Виды частотных преобразователей. По конструкции частотные преобразователи бывают:.
Этот принцип заложен в основу управления электродвигателями. Виды частотных преобразователей. По конструкции частотные преобразователи бывают:.
Выбор частотного преобразователя по току, мощности и другим параметрам
Содержание: На какие параметры обратить внимание Как рассчитать частотник под двигатель. Сразу стоит отметить, что с помощью частотного преобразователя вы можете подключить асинхронный трёхфазный двигатель к однофазной сети без конденсаторов, соответственно и без потери мощности. Чтобы понять, как правильно выбрать частотный преобразователь, давайте рассмотрим ряд основных параметров:. Часто преобразователи частоты подбирают для глубинного насоса.
Такой большой процент использования асинхронных машин обусловлен простотой конструкции, ремонтопригодности относительно невысокой стоимости, простоты замены и унификации при замени одного производителя на другого. Сама теория работы асинхронной машины была изложена еще Никола Тесла в году.
Частотные преобразователи для асинхронных двигателей
Теория и практика.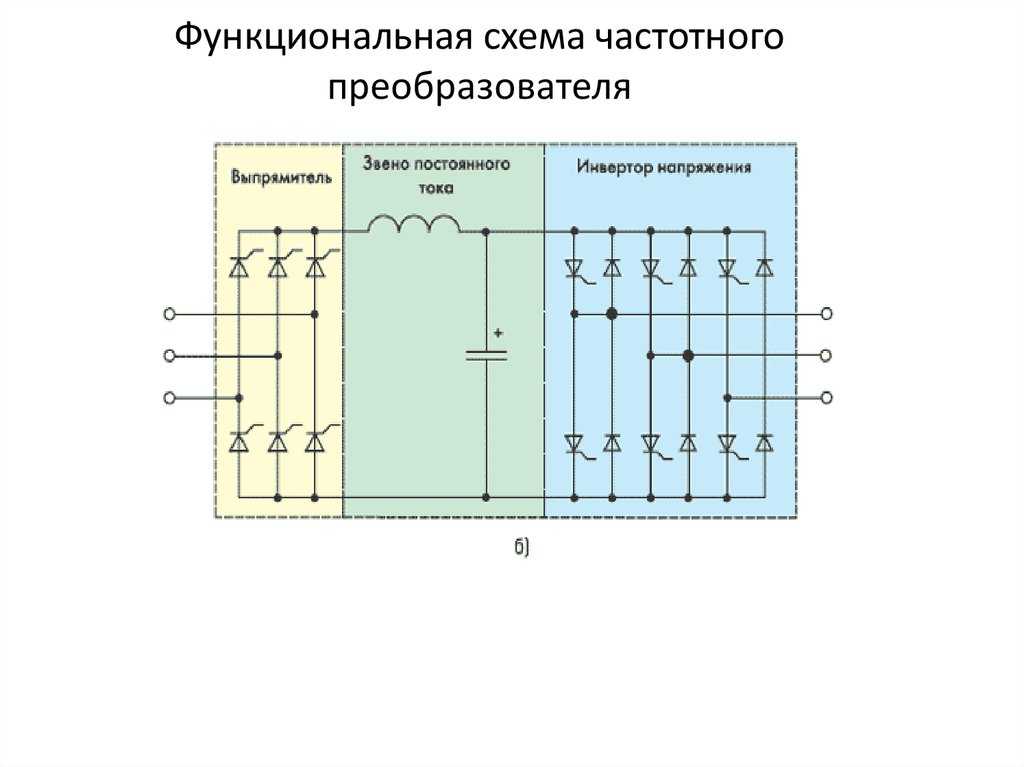 Кейсы, схемы, примеры и технические решения, обзоры интересных электротехнических новинок. Уроки, книги, видео. Профессиональное обучение и развитие. Сайт для электриков и домашних мастеров, а также для всех, кто интересуется электротехникой, электроникой и автоматикой.
Кейсы, схемы, примеры и технические решения, обзоры интересных электротехнических новинок. Уроки, книги, видео. Профессиональное обучение и развитие. Сайт для электриков и домашних мастеров, а также для всех, кто интересуется электротехникой, электроникой и автоматикой.
Преобразователи частоты
В данной статье будет рассмотрен частотник для электродвигателя, принцип его работы и основные компоненты. Основной упор будет сделан на теорию, чтобы вы поняли принцип работы частотного преобразователя и смогли в дальнейшем осуществить проектировку и изготовление своими руками. Но для начала потребуется небольшой вводный курс, в котором будет рассказано о том, что такое частотник и для каких целей он необходим. Львиную долю занимают в промышленности асинхронные двигатели. И ими управлять всегда было трудно, так как они имеют постоянную частоту вращения ротора, а изменять входное напряжение оказывается очень сложно, а порой даже невозможно. Но частотник полностью изменяет картину.
Частотные преобразователи для асинхронных двигателей Трехфазные инверторы подключаются к сети В, подключение.
Частотные преобразователи для двигателей
С целью охраны окружающей среды везде вводятся правила, рекомендующие производителям электрооборудования выпускать продукцию, экономно расходующую электроэнергию. Зачастую это достигается эффективным управлением скорости электродвигателя. Частотник для трехфазного электродвигателя или частотный преобразователь имеет множество наименований: инвертор, преобразователь частоты переменного тока, частотно регулируемый привод. На сегодняшний день частотники производят многие фирмы, но есть немало энтузиастов, создающих преобразователи своими руками.
Частотный привод 5-200Гц (10-400Гц) своими руками
ВИДЕО ПО ТЕМЕ: Преобразователь частоты для асинхронного электродвигателя. Что это такое, как он устроен.
Согласно ГОСТ полупроводниковый преобразователь частоты — полупроводниковый преобразователь переменного тока, осуществляющий преобразование переменного тока одной частоты в переменный ток другой частоты. Частотный преобразователь — это устройство, используемое для того чтобы обеспечить непрерывное управление процессом. Преобразователи частоты находят все более широкое применение в различных приложениях промышленности и транспорта. Благодаря развитию силовых полупроводниковых элементов, инверторы напряжения и инверторы тока с ШИМ управлением получают все более широкое распространение. Устройства, которые преобразуют постоянный сигнал в переменный, с желаемым напряжением и частотой, называются инверторами. На данный момент основная часть всей производимой электрической энергии в мире используется для работы электрических двигателей.
Частотный преобразователь — это устройство, используемое для того чтобы обеспечить непрерывное управление процессом. Преобразователи частоты находят все более широкое применение в различных приложениях промышленности и транспорта. Благодаря развитию силовых полупроводниковых элементов, инверторы напряжения и инверторы тока с ШИМ управлением получают все более широкое распространение. Устройства, которые преобразуют постоянный сигнал в переменный, с желаемым напряжением и частотой, называются инверторами. На данный момент основная часть всей производимой электрической энергии в мире используется для работы электрических двигателей.
Предлагаемый инвертор состоит из микроконтроллера, узла защиты от превышения допустимого тока нагрузки и мощных коммутаторов напряжения на IGBT.
Частотный преобразователь. Разница между однофазным и трехфазным
Преобразователь предназначался для питания миниатюрного трехфазного двигателя ДИД. Я начинал изучение схемотехники драйвера бесколлекторного двигателя по апноте Atmel.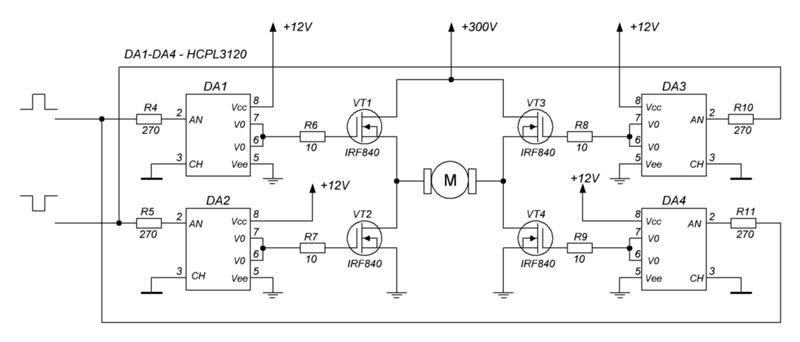 Драйвер Асинхронного Двигателя Итак коль уж асинхронный двигатель так распространён и трехфазная система напряжения. Дальше —проще, понадобится драйвер трехфазного моста IRIR При замыканиях в обмотках двигателя вращающимся магнитным полем в короткозамкнутом контуре будет наводиться. Драйвер асинхронного двигателя — форум Трехфазный асинхронный двигатель Схема драйвера асинхронного двигателя. Инверторы для асинхронных двигателей или как регулировать скорость патрона в настольном токарном станке.
Драйвер Асинхронного Двигателя Итак коль уж асинхронный двигатель так распространён и трехфазная система напряжения. Дальше —проще, понадобится драйвер трехфазного моста IRIR При замыканиях в обмотках двигателя вращающимся магнитным полем в короткозамкнутом контуре будет наводиться. Драйвер асинхронного двигателя — форум Трехфазный асинхронный двигатель Схема драйвера асинхронного двигателя. Инверторы для асинхронных двигателей или как регулировать скорость патрона в настольном токарном станке.
Частотный преобразователь применяется для того, чтобы из одной фазы получить три. Трехфазное питание используется, в основном, в промышленности. Однако и в бытовых ситуациях потребуется управление, например, трехфазным асинхронным двигателем.
Схема преобразователь частоты для асинхронного двигателя
Зачастую приходится понижать скорость вращения двигателя, выполняющего определенные задачи в механизме. Уменьшение числа оборотов элеткродвигателя можно добиться с помощью самодельных приборов , управляющих схем стандартного изготовления. Электродвигатели переменного тока часто используются в деятельности человека, на металлообрабатывающих станках, транспорта, крановых механизмов и другого оборудования. Двигатели превращают энергию переменного тока питания во вращение вала и агрегатов. Используются в основном асинхронные двигатели переменного тока. Ротор, а также и статор двигателя состоят из катушек провода, уложенного в сердечник, изготовленный из специальной стали.
Электродвигатели переменного тока часто используются в деятельности человека, на металлообрабатывающих станках, транспорта, крановых механизмов и другого оборудования. Двигатели превращают энергию переменного тока питания во вращение вала и агрегатов. Используются в основном асинхронные двигатели переменного тока. Ротор, а также и статор двигателя состоят из катушек провода, уложенного в сердечник, изготовленный из специальной стали.
Поиск данных по Вашему запросу:
Схема преобразователь частоты для асинхронного двигателя
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Энергетические показатели электропривода на базе частотного преобразователя
- Расчет параметров частотного преобразователя для асинхронных двигателей
- Для асинхронного двигателя
- Частотный преобразователь для асинхронного двигателя — регулятор частоты электродвигателя
- Основные сведения о частотно-регулируемом электроприводе
- Трехфазный инвертор своими руками
- Преобразователь частоты схема.
- Частотный преобразователь

ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Частотник для регулирования оборотов трёхфазного двигателя
Энергетические показатели электропривода на базе частотного преобразователя
С целью охраны окружающей среды везде вводятся правила, рекомендующие производителям электрооборудования выпускать продукцию, экономно расходующую электроэнергию.
Зачастую это достигается эффективным управлением скорости электродвигателя. Частотник для трехфазного электродвигателя или частотный преобразователь имеет множество наименований: инвертор, преобразователь частоты переменного тока, частотно регулируемый привод.
На сегодняшний день частотники производят многие фирмы, но есть немало энтузиастов, создающих преобразователи своими руками.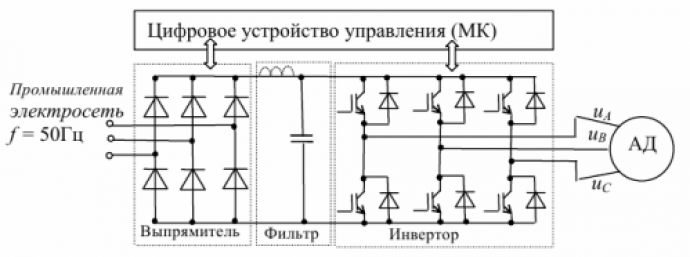 Инвертор управляет скоростью вращения асинхронных электродвигателей, т. Это очень удобно и благодаря этому асинхронные электродвигатели приобрели большую популярность во всех областях человеческой жизни. Важно отметить, что скорость вращения могут регулировать и другие устройства, но все они имеют множество недостатков:. Многим известно, что использование частотных преобразователей для регулировки скорости является самым эффективным методом.
Инвертор управляет скоростью вращения асинхронных электродвигателей, т. Это очень удобно и благодаря этому асинхронные электродвигатели приобрели большую популярность во всех областях человеческой жизни. Важно отметить, что скорость вращения могут регулировать и другие устройства, но все они имеют множество недостатков:. Многим известно, что использование частотных преобразователей для регулировки скорости является самым эффективным методом.
Это устройство обеспечивает плавный пуск и остановку, а также осуществляет контроль всех процессов, которые происходят в двигателе. Риск возникновения аварийных ситуаций, при использовании преобразователя частоты, крайне незначителен. Для обеспечения плавной регулировки и быстродействия разработана специальная схема частотного преобразователя.
Его использование в значительной мере увеличивает время непрерывной работы трехфазного двигателя и экономит электроэнергию.
Первоначально он изменяет поступающее из сети напряжение. Затем из преобразованного напряжения формирует трехфазное, необходимой амплитуды и частоты, которое подается на электродвигатель. Диапазон регулировки достаточно широкий. Есть возможность крутить ротор двигателя и в обратном направлении.
Диапазон регулировки достаточно широкий. Есть возможность крутить ротор двигателя и в обратном направлении.
Во избежание его поломки необходимо учитывать паспортные данные, где указаны максимально допустимые обороты и мощность в кВт. В случае векторного режима управления учитывается взаимодействие магнитных полей ротора и статора, оптимизируется момент вращения при работе на разной скорости.
Это является главным различием двух режимов. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления.
Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату. После приобретения инвертора по доступной цене возникает вопрос: как подключить его к двигателю своими руками?
Прежде чем это сделать будет нелишним поставить обесточивающий автомат. В случае возникновения короткого замыкания хотя бы в одной фазе, вся система будет немедленно отключена. В этом случае потерь мощности не происходит. Максимальная мощность такого частотника 3 кВт. Трехфазные инверторы более совершенны. Они получают питание от промышленных трехфазных сетей.
Трехфазные инверторы более совершенны. Они получают питание от промышленных трехфазных сетей.
В момент переключения на второй вариант скорость вращения резко снижается. Чтобы восстановить частоту оборотов, необходимо увеличить силу тока. Наибольшей популярностью пользуются преобразователи для электродвигателей мощностью от 0,4 кВт до 7,5 кВт. Наряду с выпуском промышленных инверторов многие изготавливают их своими руками. Особой сложности в этом нет. Электродвигатель с подобным преобразователем можно использовать в быту, тем более что мощность его не теряется.
Выпрямительный блок идет в схеме первым. Затем идут фильтрующие элементы, отсекающие переменную составляющую тока. Цена всех составляющих частотника, изготовленного своими руками, намного меньше цены готового производственного изделия.
Современные преобразователи производятся с использованием микроконтроллеров. Это намного расширило функциональные возможности инверторов в области алгоритмов управления и контроля за безопасностью работы.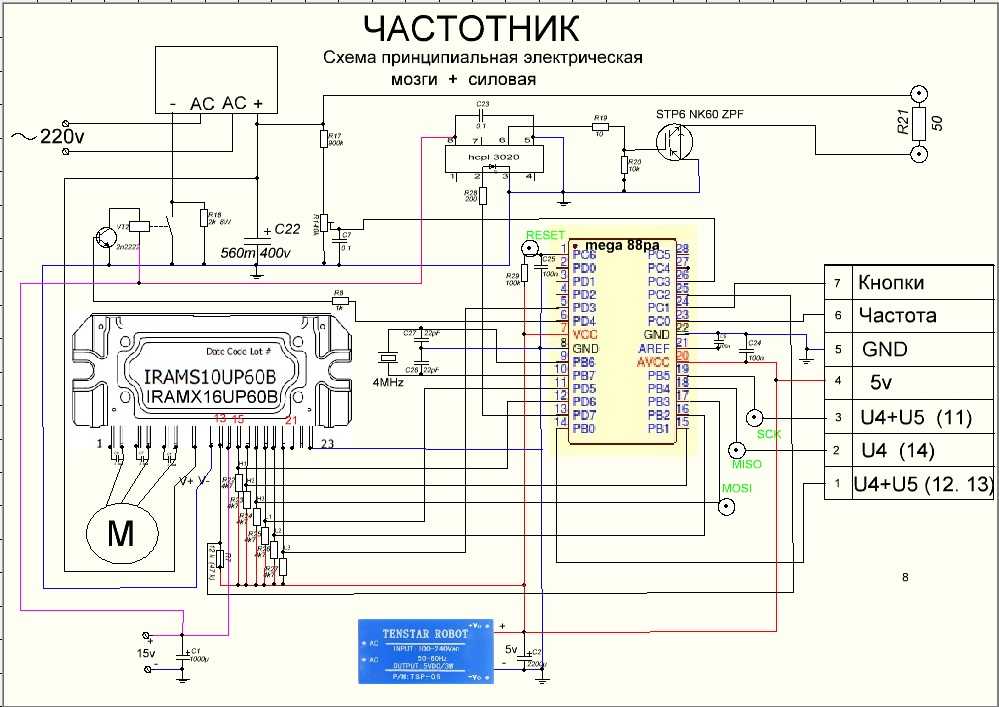 Цены источников бесперебойного питания напрямую зависят от наличия в нем частотника. Благодаря им, малая энергетика станет наиболее развитой отраслью экономики. А его вторая пара контактов замкнет сделанные нами разрезы дорожек на печатной плате, которые подводят силовое напряжение к штатному однофазному полноволновому выпрямителю.
Цены источников бесперебойного питания напрямую зависят от наличия в нем частотника. Благодаря им, малая энергетика станет наиболее развитой отраслью экономики. А его вторая пара контактов замкнет сделанные нами разрезы дорожек на печатной плате, которые подводят силовое напряжение к штатному однофазному полноволновому выпрямителю.
Больше ни для чего К1 не нужен. Он лишь восстанавливает исходную схему питания сварочного аппарата после перерезания двух проводов и двух дорожек.
Пускатель К2 10А на контакт используется для подключения трех фазной части питания в схему аппарата. Он поменьше и подешевле, так как от него требуется замыкание всего двух проводов, которые мы пропустим через спаренные 10А-ные контактны е группы. Собственно, это все. Провод купил четырехжильный диаметром 2,5мм на жилу.
Выпрямительные диоды на радиаторе я планировал разместить внутри сварАппа. Однако, в процессе работы, мне пришло в голову более изящное и безопасное решение. Смысл сводился в том, что я размещу 3х-фазный выпрямитель в отдельном боксе непосредственно около входного щитка, и на сварочный пущу уже выпрямленное напряжение по одному проводу, по второму любую из фаз на схему запуска электроники сварАппа без этого никак , по третьему пущу NULL, и у меня остается еще четвертый провод, по которому я приделаю от входного щитка настоящую честную ЗЕМЛЮ на корпус аппарата она у меня во входном щитке реально есть.
Это я счел более удобным. Это не автомат, их хватает вместе с УЗО в основном щитке, это просто трехконтактный выключатель. Провода брал медные, тоже обрывки пособирал в хозяйстве, те которые потоньше складывал парой — одним концом в шуруповерт и закручиваем: выходит красивенько жесткой косичкой.
Общее сечение меди достаточно 2мм2. Больше не имеет особого смысла. Очень удобно брать медь одной толстой жилой. Она сразу будет служить жестким конструктивом и грамотнее зажимается в клемниках. Да, и приготовьте паяльник ватт на , чтобы делать сборку культурно там где потребуется, мы же не китайцы. Теперь, призываем в помощь всю нашу внимательность и делаем, как я сказал: для тех , кто до сих пор плавает в нашей теме и подзабыл правила саперной техники. Образовавшиеся культи зачищаем от оплетки, красиво залуживаем и зажимаем в двух верхних на фото клемниках К1.
Подсказка — перед шагом 1, приготовьте и прикрутите подходящий проводок к катушке К1 и сразу спаяйте его с концами нейтрали и фазы идущей от фильтра ВЧ помех это нижний на фото разрезанный кусок.
Смело зажимайте эти концы на клеммах катушки пускателя в любом. Если вы сделали шаг 1, то можно включить провод сварочника в розетку и убедиться, что он продолжает работать как и прежде, единственное, что нас сначала выводит из себя то, что при включении провода в розетку раздается щелчок пускателя.
От этого поначалу вздрагиваешь, но потом привыкаешь. Берем в руки ножовочное полотно и аккуратно, шириной не меньше 1,5мм, поглубже в текстолит, разрезаем дорожки, которые идут к паре четверок из желтых проводов в разъемах.
Здесь поближе, обратите внимание — желтый маленький кружок вокруг контакта варистора, который мы перерезали черная черточка обозначает бывшую дорожку. А красная полоска, это перемычка, которую необходимо не забыть позже припаять! Иначе не будут гаситься переходные импульсные всплески напряжения.
Справа, овалом обведены контакты релюшки белая , которая с некоторой задержкой замыкается после подачи питания на сварАпп. Это, собственно и есть все контрольные точки, на которых будет обращено наше внимание в манипуляциях дальше.
А дальше — мы раскладываем от К1 провода, чтобы замкнуть ее контактами разрез, сделанный нами. Не полностью отключая голову доверяемся нашим прямым ручкам…. Вот там мы разложили, а здесь концы припаяли. Не видно на фото? Припаиваем к концам разрезанных дорожек самые слева по фотке, идущие на выпрямитель двухжильный не толстый проводок, который идет на катушку К2. Соединяем четырьмя коротенькими оранжевые перемычками контакты К2 попарно.
На фото, правые контакты К2 короткими проводами скручиваем и зажимаем вместе с контактами К1, идущими туда же, откуда бросили провод на катушку К2. Внимательно смотрим на схему и с умным выражением лица тыкаем тестером в клеммы, проверяя соответствие разводки проводов схеме. Лениться не стоит.. Этот силовой плюс , уходит к спаренным контактам пускателя К2 на фотке хорошо видно.
Напоминаю, что на этом ФОТО розетка с 5-ю контактами, позже, когда я вынесу выпрямитель в щиток, розетка будет четырехконтактной. Щелкнули пускатели…. И все заработало!! У меня таким оказалась протухшая в плесени со времен перестройки 4-ка. Хватаем черную железяку, в месте где она толщиной 10мм, бессовестно упираем и давим электрод… В первое мгновение он подлипает, с шипением выкипает из него вода с грибами реально, прямо супом запахло! Последний штрих — затягиваем где есть возможность, жгутами у меня зеленые были, уже не помню где экспроприировал.
Хватаем черную железяку, в месте где она толщиной 10мм, бессовестно упираем и давим электрод… В первое мгновение он подлипает, с шипением выкипает из него вода с грибами реально, прямо супом запахло! Последний штрих — затягиваем где есть возможность, жгутами у меня зеленые были, уже не помню где экспроприировал.
Любуемся, и принимаемся за оформление вывода проводов для трехфазной розетки. Снимаем с силового кабеля небольшой кусок оплетки и обхватываем все кабеля в том месте, где они будут проходить через отверстие в крышке инвертора, ну, и обматываем изоляцией.
По русски, все более прозаично — Электрощиток Накладной. Сверлим м сверлом отверстие в крышке сварАппа под вывод наших силовых поводов, прикручиваем одну из розеток, прикручиваем концы проводов и т. Делаем предподготовку соединения второй розетки и щитка с выпрямителем и отключателем нагрузки, тестером проверяем чтобы в розетках не было перепутывания проводов и идем прикручивать щиток на стенку.
На текущий момент спалил баллон аргона балуясь с сварАппом на 3-х фазах.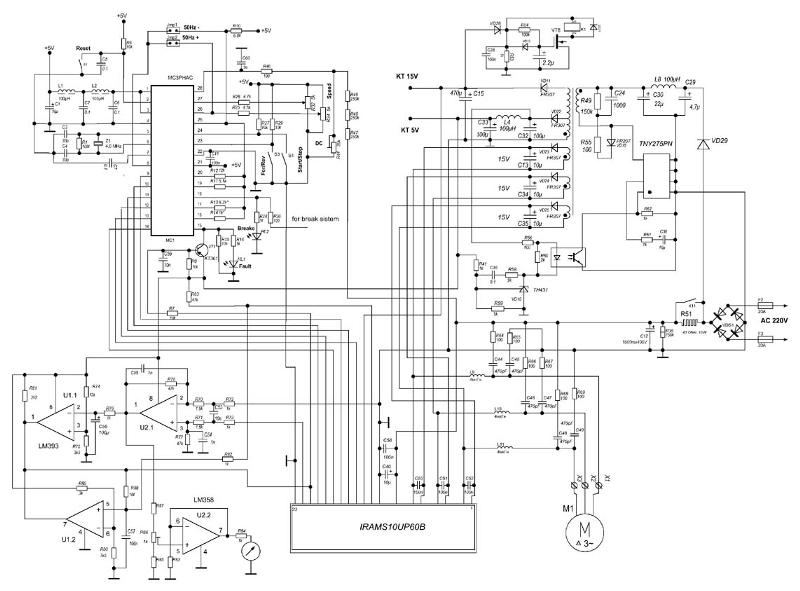 Работает безукоризненно. Зачем нужно делать самому преобразователь для 3-фазного электромотора, и как смастерить его своими руками? Чтобы защитить окружающую природу повсюду создаются правила, которые рекомендуют изготовителям электрических устройств делать продукцию, которая будет экономить электрическую энергию. Часто это бывает достигнуто правильным управлением частотой вращения электромотора.
Работает безукоризненно. Зачем нужно делать самому преобразователь для 3-фазного электромотора, и как смастерить его своими руками? Чтобы защитить окружающую природу повсюду создаются правила, которые рекомендуют изготовителям электрических устройств делать продукцию, которая будет экономить электрическую энергию. Часто это бывает достигнуто правильным управлением частотой вращения электромотора.
Преобразователь частоты легко решает эту задачу. Частотник электромотора с тремя фазами по-разному называют: инвертор, частотный изменитель тока, приводной механизм, регулируемый частотой.
Расчет параметров частотного преобразователя для асинхронных двигателей
В течение длительного времени компании Omron и Yaskawa тесно взаимодействовали в вопросах производства продукции для приводной техники и автоматизации технологических процессов. Именно частотные инверторы или преобразователи частоты Omron представлены в этой статье. Преобразователи частоты предназначены для регулировки частоты вращения и момента на валу асинхронного или синхронного электродвигателя. Выходная частота в современных инверторах может быть как ниже, так и выше частоты питающей сети. Схема любого преобразователя частоты состоит из силовой и управляющей частей. Силовая часть преобразователей Omron выполнена на транзисторах IGBT, работающих в режиме электронных ключей.
Появление силовых схем с IGBT-транзисторами, разработка Статические преобразователи частоты являются наиболее совершенными асинхронного двигателя заключается в том, что, изменяя частоту f1 питающего.
Для асинхронного двигателя
С целью охраны окружающей среды везде вводятся правила, рекомендующие производителям электрооборудования выпускать продукцию, экономно расходующую электроэнергию. Зачастую это достигается эффективным управлением скорости электродвигателя. Частотник для трехфазного электродвигателя или частотный преобразователь имеет множество наименований: инвертор, преобразователь частоты переменного тока, частотно регулируемый привод. На сегодняшний день частотники производят многие фирмы, но есть немало энтузиастов, создающих преобразователи своими руками.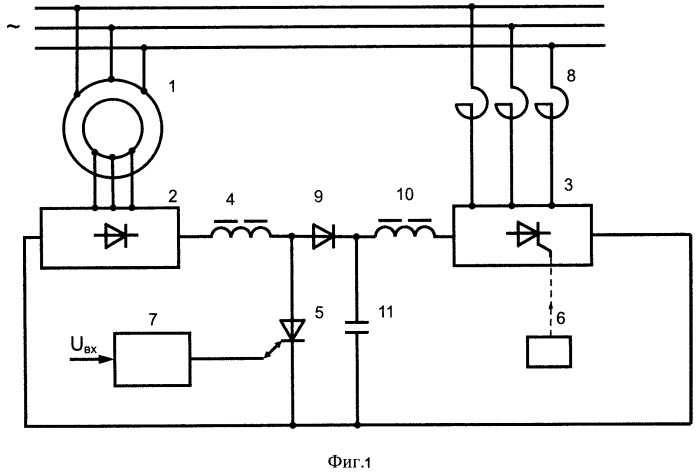 Инвертор управляет скоростью вращения асинхронных электродвигателей, т. Это очень удобно и благодаря этому асинхронные электродвигатели приобрели большую популярность во всех областях человеческой жизни. Важно отметить, что скорость вращения могут регулировать и другие устройства, но все они имеют множество недостатков:.
Инвертор управляет скоростью вращения асинхронных электродвигателей, т. Это очень удобно и благодаря этому асинхронные электродвигатели приобрели большую популярность во всех областях человеческой жизни. Важно отметить, что скорость вращения могут регулировать и другие устройства, но все они имеют множество недостатков:.
Частотный преобразователь для асинхронного двигателя — регулятор частоты электродвигателя
Полезные советы. Самодельный частотник. Разрабатываем преобразователь вместе. Частотник для трехфазного электродвигателя своими руками схема. Инвертор для электродвигателя.
С конца х годов преобразователи частоты изменились коренным образом, в основном, как результат разработки микропроцессорных и полупроводниковых технологий, а также благодаря снижению их стоимости. Выпрямители бывают двух основных типов — управляемые и неуправляемые.
Основные сведения о частотно-регулируемом электроприводе
До появления частотных преобразователей на рынке современной энергетики, электромонтёрам приходилось применять для подключения асинхронного двигателя стартовый или фазосдвигающий конденсатор большой ёмкости. Двигатель при этом работал, но существенно терял мощность. Учитывая, что обмотки асинхронного двигателя делаются из медной проволоки, то такие ремонты приносили большой ущерб. Так как асинхронный двигатель является составной частью почти каждого современного привода, то вопрос создания частотного регулирования вставал на особый уровень. И вот, частотники уже повсеместно применяются для подключения электрического двигателя к сети и его управление.
Двигатель при этом работал, но существенно терял мощность. Учитывая, что обмотки асинхронного двигателя делаются из медной проволоки, то такие ремонты приносили большой ущерб. Так как асинхронный двигатель является составной частью почти каждого современного привода, то вопрос создания частотного регулирования вставал на особый уровень. И вот, частотники уже повсеместно применяются для подключения электрического двигателя к сети и его управление.
Трехфазный инвертор своими руками
Асинхронный двигатель машина — это электрический двигатель, частота вращения которого не совпадает с частотой тока ЭДС , прикладываемого к статору. К преимуществам таких двигателей можно отнести их низкую стоимость, простоту изготовления и эксплуатации, а также возможность прямого включения без регулирования или преобразования питающего тока. Есть у них и недостатки: высокие требования к пусковому току, сложная регулировка оборотов, низкий коэффициент мощности и др. Здесь стоит отметить, что асинхронные двигатели рассчитаны на работу только с трехфазным напряжением, только в этом случае не требуются никакие преобразователи. Однако, в быту часто требуется запитать асинхронный двигатель от обычной сети переменного тока с одной фазой, и именно здесь кроется основная проблема. Изменяя частоту питающего тока, вы меняете частоту вращения двигателя, можете запустить его или наоборот — остановить.
Однако, в быту часто требуется запитать асинхронный двигатель от обычной сети переменного тока с одной фазой, и именно здесь кроется основная проблема. Изменяя частоту питающего тока, вы меняете частоту вращения двигателя, можете запустить его или наоборот — остановить.
Вычислительные устройства для преобразователей частоты. .. Двумя главными компонентами асинхронного электродвигателя являются статор ( .. Эквивалентная схема на холостом ходу (a) и с заторможенным ротором ( b).
Преобразователь частоты схема.
Схема преобразователь частоты для асинхронного двигателя
Ротор любого электродвигателя приводится в движение под действием сил, вызванных вращающимся электромагнитным полем внутри обмотки статора. Скорость его оборотов обычно определяется промышленной частотой электрической сети. Ее стандартная величина в 50 герц подразумевает совершение пятидесяти периодов колебаний в течение одной секунды. Такое же число раз проворачивается ротор под воздействием приложенного электромагнитного поля.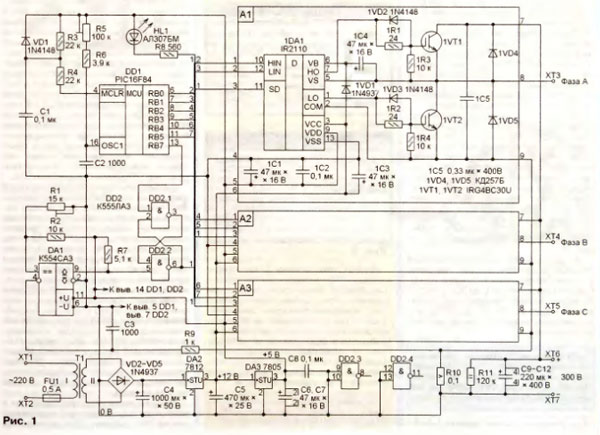
Частотный преобразователь
ВИДЕО ПО ТЕМЕ: Простой самодельный частотник для асинхронного двигателя на STM8S
Основные сведения о частотно-регулируемом электроприводе. Главная Информация Статьи. Цель нашей компании — предложение широкого ассортимента товаров и услуг на постоянно высоком качестве обслуживания. Частотник в комплекте с асинхронным электродвигателем позволяет заменить электропривод постоянного тока. Системы регулирования скорости двигателя постоянного тока достаточно просты, но слабым местом такого электропривода является электродвигатель. Он дорог и ненадежен.
Переменное напряжение питающей сети uвх. Для сглаживания пульсаций выпрямленного напряжения uвыпр.
Согласно ГОСТ полупроводниковый преобразователь частоты — полупроводниковый преобразователь переменного тока, осуществляющий преобразование переменного тока одной частоты в переменный ток другой частоты. Частотный преобразователь — это устройство, используемое для того чтобы обеспечить непрерывное управление процессом. Преобразователи частоты находят все более широкое применение в различных приложениях промышленности и транспорта. Благодаря развитию силовых полупроводниковых элементов, инверторы напряжения и инверторы тока с ШИМ управлением получают все более широкое распространение. Устройства, которые преобразуют постоянный сигнал в переменный, с желаемым напряжением и частотой, называются инверторами. На данный момент основная часть всей производимой электрической энергии в мире используется для работы электрических двигателей. Преобразование электрической мощности в механическую мощность осуществляется с помощью электродвигателей мощностью от меньше ватта до нескольких десятков мегаватт.
Частотный преобразователь — это устройство, используемое для того чтобы обеспечить непрерывное управление процессом. Преобразователи частоты находят все более широкое применение в различных приложениях промышленности и транспорта. Благодаря развитию силовых полупроводниковых элементов, инверторы напряжения и инверторы тока с ШИМ управлением получают все более широкое распространение. Устройства, которые преобразуют постоянный сигнал в переменный, с желаемым напряжением и частотой, называются инверторами. На данный момент основная часть всей производимой электрической энергии в мире используется для работы электрических двигателей. Преобразование электрической мощности в механическую мощность осуществляется с помощью электродвигателей мощностью от меньше ватта до нескольких десятков мегаватт.
ТОР товары Mitsubishi Electric. Микроконтроллеры Альфа. Преобразователи частоты Mitsubishi.
Асинхронный двигатель как подключить к инвертору
Преобразователь частоты переменного тока уже много лет применяются при строительстве электромеханических приборов и агрегатов. Они позволяют модулировать частоту для того, чтобы регулировать скорость вращения вола электрического двигателя.
Они позволяют модулировать частоту для того, чтобы регулировать скорость вращения вола электрического двигателя.
Частотники позволили подключать трёхфазный электрический двигатель к однофазной сети питания, при этом, не теряя мощности. При старинном типе подключения, через емкий конденсатор, большая часть мощности двигателя терялась, КПД существенно снижалось, обмотки электрического двигателя сильно перегревались.
Всех этих проблем удалось избежать, применением частотного преобразователя. При этом очень важно соблюдать правильное подключение частотного преобразователя к электрическому двигателю.
Некоторые особенности подключения любого частотника в связку с электрическим двигателем.
Во-первых
Из соображений безопасности эксплуатации прибора, при подключении частотника (или любого иного прибора) к сети питания, обязательно нужно устанавливать защитный автомат. Автомат устанавливается перед частотником.
При этом если частотный преобразователь подключается в сеть с трёхфазным напряжением, то установить необходимо автомат тоже трёхфазный, но с общим рычагом отключения. Это позволит отключить питание от всех фаз одновременно, если хотя бы на одной фазе будет короткое замыкание или сильная перегрузка.
Это позволит отключить питание от всех фаз одновременно, если хотя бы на одной фазе будет короткое замыкание или сильная перегрузка.
Если преобразователь частоты подключается в сеть с однофазным напряжением, то соответственно применяется автомат однофазный. Но при этом, в расчет берётся ток одной фазы, умноженный на три.
При подключении трёхфазного автомата, его рабочий ток определяется током одной фазы.
Однозначно запрещено устанавливать защитный автомат в разрыв нулевого кабеля, как при однофазном подключении, так и при трёхфазном. Такое подключение только внешне выглядит идентичным (ошибочно понимать, что цепь одна и не важно, где её разрывать).
На самом деле, в случае разрыва фазовых кабелей, при срабатывании автомата, питание полностью отключается и на цепях прибора не будет фаз вовсе. Это безопасно. А при срабатывании автомата с разорванным нулём, работа прибора прекратиться.
Но при этом, обмотки двигателя и цепи частотника останутся под напряжением, что является нарушением правил техники безопасности и опасно для человека.
Также, не при каких условиях не разрывается заземляющий кабель. Как и нулевой, они должны быть подключены к соответствующим шинам напрямую.
Во вторых
Следует подключить фазовые выходы частотного преобразователя к контактам электрического двигателя. При этом обмотки электрического двигателя следует подключить по принципу «треугольник» или «звезда».
Тип выбирается исходя из напряжения, которое вырабатывает частотник. Как правило, к каждому инвертеру приложена инструкция, в которой подробно расписано, как соединяются обмотки двигателя для подключения конкретного частотника.
Схема подключения частотного преобразователя к 3-х фазному двигателю также должна быть приведена в инструкции.
Обычно на корпусах двигателей приведены оба значения напряжения. Если частотник соответствует меньшему, то обмотки соединяются по принципу треугольника. В других случаях по принципу звезды. Схема подключения частотного преобразователя также должна быть приведена в паспорте частотника. Там же обычно приводятся и рекомендации по подключению.
Там же обычно приводятся и рекомендации по подключению.
В третьих
Практически к каждому преобразователю частоты в комплекте прилагается выносной пульт управления. Несмотря на то, что на самом корпусе частотника уже есть интерфейс для ввода данных управления и программирования, наличие выносного пульта управления является очень удобной опцией.
Пульт монтируется в месте, где удобнее всего с ним работать. В некоторых случаях, когда преобразователь частоты несколько уступает в пылевой защите и защите от влаги, сам частотник может быть установлен вдали от двигателя, а пульт управления рядом, для того, чтобы не бегать к шкафу управления и не регулировать обороты там.
Всё зависит от конкретных обстоятельств и требований производства.
Первый пуск и настройка преобразователя частоты
После подключения к преобразователю частоты пульта управления, следует рукоятку скорости вращения вала двигателя перевести в наименьшее положение.
После этого нужно включить автомат, тем самым подать питание на частотник.
Как правило, после включения питания должны загореться световые индикаторы на частотнике и, при наличии светодиодной панели, на ней должны отобразиться стартовые значения.
Принцип подключения цепей управления частотного преобразователя не является универсальным. Нужно соблюдать указания, указанные в инструкции к конкретному частотнику.
Для первого запуска двигателя потребуется нажать кратковременно клавишу пуска на частотнике. Как правило, эта кнопка запрограммирована на пуск двигателя по умолчанию на фабрике.
После пуска, вал двигателя должен начать медленно вращаться. Возможно, двигатель будет вращаться в противоположную сторону, отличную. От необходимой.
Проблему можно решить программированием частотника на реверсное движение вала. Все современные модели преобразователей частоты поддерживают эту функцию. Можно воспользоваться и примитивным подключением фаз в другом порядке фаз.
Все современные модели преобразователей частоты поддерживают эту функцию. Можно воспользоваться и примитивным подключением фаз в другом порядке фаз.
Хотя это долго и не рентабельно по затрате времени и сил электромонтёра.
Дальнейшая настройка предполагает выставления нужного значения оборотов двигателя. Нередко на частотника отображается не частота вращения вала двигателя, а частота питающего двигатель напряжения, выраженная в герцах. Тогда потребуется воспользоваться таблицей, для определения соответствующего значения частоты напряжения частоте вращения вала двигателя.
При монтаже и обслуживании, а также замене преобразователя частоты важно соблюдать ряд рекомендаций.
- Любое касание рукой или иной частью тела токоведущего элемента может отнять здоровье или жизнь. Это важно помнить при любой работе со шкафом управления. При работе со шкафом управления следует отключить входящее питание и убедиться что именно фазы отключены.
- Важно помнить, что некоторое напряжение может ещё оставаться в цепи, даже при угасании световых индикаторов. Посему, при работе с агрегатами до 7 кВт, после отключения питания рекомендуется прождать минут пять не меньше. А при работе с приборами более 7 кВт, прождать нужно не менее 15 минут после отключения фаз. Это даст возможность разрядиться всем имеющимся в цепи конденсаторам.
- Каждый преобразователь частоты должен иметь надёжное заземление. Заземление проверяется согласно правилам профилактических работ.
- Строго запрещено использовать в качестве заземления нулевой кабель. Заземление монтируется отдельным кабелем отдельно от нулевой шины. Даже при наличии и нулевой шины и шины заземления, при соответствии их нормам электромонтажа, соединять их запрещено.
- Важно помнить, что клавиша отключения частотника не является гарантией обесточивания цепей. Эта клавиша всего лишь останавливает двигатель, при этом ряд цепей может оставаться под напряжением.
 Посему, при работе с агрегатами до 7 кВт, после отключения питания рекомендуется прождать минут пять не меньше. А при работе с приборами более 7 кВт, прождать нужно не менее 15 минут после отключения фаз. Это даст возможность разрядиться всем имеющимся в цепи конденсаторам.
Посему, при работе с агрегатами до 7 кВт, после отключения питания рекомендуется прождать минут пять не меньше. А при работе с приборами более 7 кВт, прождать нужно не менее 15 минут после отключения фаз. Это даст возможность разрядиться всем имеющимся в цепи конденсаторам.Подключение частотного преобразователя к электродвигателю осуществляется с применением кабелей, сечение которых соответствует тем характеристикам, которые указаны в паспорте частотника. Нарушение норм в меньшую сторону недопустимо. В большую сторону, может быть не целесообразно.
Нарушение норм в меньшую сторону недопустимо. В большую сторону, может быть не целесообразно.
Прежде чем как подключить частотный преобразователь к электродвигателю, важно убедиться в соответствии условий, при которых будет работать преобразователь частоты. Фактически, условия должны соответствовать рекомендациям, приведённым в инструкции.
В каждом конкретном случае, подключение частотника может сопровождаться рядом обязательных условий. Чтобы узнать, как подключить частотник к 3 фазному двигателю схемы, которого есть в наличии. Сначала изучаются схемы.
Если в них всё понятно, подключение выполняется при строго следовании инструкции. Если что-то не понятно, не следует выдумывать самостоятельно и полагаться на свою интуицию.
Нужно связаться с поставщиком или производителем, для получения соответствующих указаний.
[wpfmb type=’warning’ theme=2]Лучше дождаться помощи специалиста, чем потом ремонтировать сломанную технику. Случай-то не будет гарантийным. [/wpfmb]
[/wpfmb]
Частотный преобразователь.Как подключить трёхфазный электродвигатель от 220В.
Danfoss Drives
Станки, насосы и другое оборудование обычно оснащается трехфазными электродвигателями. Что делать при отсутствии сети на 380 В? Рассмотрим способы подключения трехфазного двигателя в электросеть 220 В.
В домашнем хозяйстве часто применяют электрооборудование, бывшее в длительной эксплуатации. Рекомендуется начать с проверки технического состояния электродвигателя. Это поможет существенно сократить время работ, исключить ошибки, а также снизить риск возникновения аварий.
Для начала:
- Осматривают корпус. Крышки с боков статора должны быть плотно притянуты к средней части, наличие зазоров, ослабление винтовых соединений не допускается.
- Провернуть ротор рукой. При этом нужно обратить внимание на биение вала или заклинивание вращающейся части.
Если есть возможность, лучше запустить двигатель без нагрузки. При вращении ротора не должно быть биений, ударов, посторонних шумом. Ротор должен вращаться свободно. Также желательно разобрать статор, промыть подшипники, заменить смазку.
При вращении ротора не должно быть биений, ударов, посторонних шумом. Ротор должен вращаться свободно. Также желательно разобрать статор, промыть подшипники, заменить смазку.
Далее следует проверить схему соединения обмоток статора. Характеристики указаны на металлической табличке или шильдике на корпусе. Параметры соответствуют фактическим характеристикам только в том случае, если схема электродвигателя не была изменена. Кроме того, шильдик может быть утрачен, а информация стерта за время длительной эксплуатации.
В этом случае требуется проверить схему сборки самому. В статоре расположены 3 обмотки, выводы которых выведены в клеммную коробку.
В ней находится 6 клемм, соединенных с началом и концом каждой обмотки.
Для их соединения применяют перемычки.
Обмотки асинхронных трехфазных электродвигателей могут быть соединены «звездой» или «треугольником». На рисунке ниже указано расположение перемычек при каждом типе соединений.
Существуют двигатели специального исполнения. Схема таких электрических машин уже собрана внутри корпуса, клеммник в этом случае имеет только 4 ввода для подключения 3 фазных и нулевой жилы.
Схема таких электрических машин уже собрана внутри корпуса, клеммник в этом случае имеет только 4 ввода для подключения 3 фазных и нулевой жилы.
Наконец у старых электродвигателей маркировка начал и концов обмоток может вовсе отсутствовать. Для правильного подключения к сети выводы необходимо определить и промаркировать.
Работа выполняется в 2 этапа:
- Определение самих обмоток. Для этого используют универсальный мультиметр или тестер в режиме измерения сопротивления. Один из щупов ставится на любой вывод, вторым поочередно касаются остальных концов. При нулевых показаниях прибора маркируют выводы обмоток.
- Определение и маркировка начал и концов обмоток. Для этого нужен вольтметр и источник переменного напряжения. Далее соединяют 2 вывода разных обмоток и подают на оставшиеся концы напряжение. При наличии напряжения на вольтметре соединенные выводы – начало одной и конец другой обмотки. При отсутствии напряжения подключены или 2 начала и 2 конца.
Далее выводы, где нет напряжения, предварительно маркируют как начала.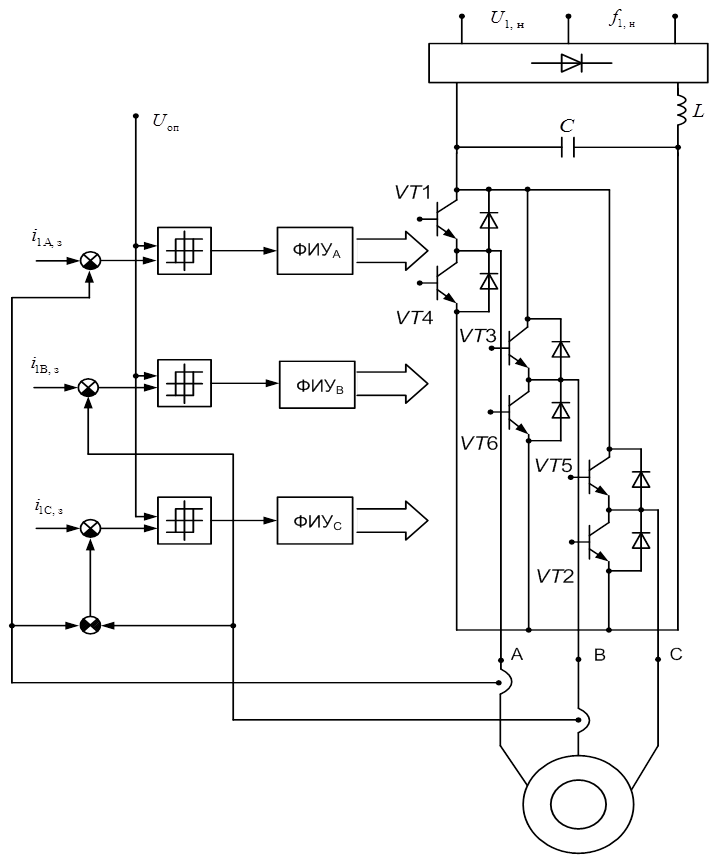 Затем соединяют найденное начало одной из обмоток с любым выводом, на которое уже подавалось напряжение. Таким образом, выявляют все оставшиеся выводы.
Затем соединяют найденное начало одной из обмоток с любым выводом, на которое уже подавалось напряжение. Таким образом, выявляют все оставшиеся выводы.
Вместо источника низкого переменного напряжения можно использовать батарейку на 4,5 или 9 В и вольтметр постоянного тока. Плюс и минус источника питания подключается к выводам любой обмотки. К концам другой – вольтметр постоянного тока.
В момент разрыва контакта обмотки с батарейкой прибор покажет некоторое значение напряжения. Далее подключают вольтметр к другой обмотке и таким же способом фиксируют показания.
При использовании универсального прибора устанавливают режим «измерение постоянного напряжения» необходимо, чтобы вольтметр показывал полярность.
Можно выбрать стрелочный прибор с возможностью измерения полярности, то есть стрелка должна отклоняться в «+» или «-».
При разрыве контакта обмотки с батарейкой, прибор в цепи обмотки В и обмотке С должен давать одинаковые показания«+» или «-». Если полярность измерений отличается, нужно поменять местами концы B1 и B2 или C1 и C2.
При правильном определении выводов, при разрыве контакта источника постоянного напряжения с любой из обмоток на двух других должно возникать импульсное напряжение одинаковой полярности.
Для маркировки концов лучше применять бирки (кембри) из ПВХ трубки диаметром больше сечения проводов с изоляцией. Подписывать можно любым маркером.
Главное – не смазать надпись. В противном случае придется определять концы и начала обмоток заново.
Еще один важный момент при определении состояния двигателя – проверка изоляции обмоток. При снижении сопротивления покрытий проводов возникает избыточный нагрев, межвитковые замыкания.
Для измерения сопротивления изоляции нужен мегаомметр с напряжением на выходе 1 кВ. Сопротивление изоляции обмоток определяют относительно корпуса и друг друга. Мегаомметр должен показать величину не менее 0,5 МОм. При меньших значениях необходимо отдать электродвигатель на перемотку.
Выявить явные межвитковые замыкания можно обычным омметром. Для этого нужно измерить сопротивления обмоток и сравнить полученные значения. Результаты измерений должны совпадать для всех трех обмоток. Различные значения означают наличие замыканий. Таким способом невозможно определить ухудшение качества изоляции, которое приведет к пробою во время работы двигателя.
Для этого нужно измерить сопротивления обмоток и сравнить полученные значения. Результаты измерений должны совпадать для всех трех обмоток. Различные значения означают наличие замыканий. Таким способом невозможно определить ухудшение качества изоляции, которое приведет к пробою во время работы двигателя.
Измерение сопротивления изоляции – обязательное условие перед пуском электродвигателя под нагрузкой. Это поможет избежать серьезных аварий и связанных с ними травм.
Проверка состояния трехфазного двигателя перед включением в сеть 220 необходима. Это поможет отличить ошибки подключения от неисправностей самого силового агрегата и сэкономить время.
Работа трехфазного электродвигателя в однофазном режиме: схемы подключения
При включении трехфазного электродвигателя в однофазную сеть возникает пульсирующее магнитное поле. Для старта двигателя нужен сдвиг фаз относительно друг друга не менее чем на 900.
Для этого применяют резистивные, емкостные, индуктивные пусковые элементы, включаемые в цепь одной из обмоток.
При этом схема трехфазного электродвигателя становится эквивалентной однофазной электрической машине.
В схеме с пусковым резистором сдвиг фаз достигается более медленным намагничиванием одной из обмоток. Такой способ имеет значительные недостатки: большие потери мощности на сопротивление и перегрев электродвигателя при длительной работе. Схемы с индуктивными пусковыми элементами также обладают недостатками.
На практике для включения трехфазных электрических машин в однофазную сеть пусковые резисторы и катушки практически не используют.
Самая распространенная схема – включение через конденсатор. Емкостные элементы гораздо компактнее резисторов, не обладают активным сопротивлением. К недостаткам конденсаторного пуска относят значительный нагрев двигателя при длительной работе и низкий пусковой момент.
Для оборудования, которое запускается под нагрузкой и предназначено для длительной работы, например бетономешалки, применяют схему с 2 конденсаторами. При пуске оба емкостных элемента включены цепь, после разгона двигателя пусковой конденсатор отключается. Это позволяет устранить недостатки схемы с конденсаторным сдвигом фаз.
При пуске оба емкостных элемента включены цепь, после разгона двигателя пусковой конденсатор отключается. Это позволяет устранить недостатки схемы с конденсаторным сдвигом фаз.
Емкость рабочего конденсатора для схемы включения «звезда» определяется исходя из выражения: Cр=2800 хP/(√3хU²х η х cosϕ). Параметры емкостного элемента при соединении в «треугольник» – по формуле Cр=4800 х P/(√3 х U² х η х cosϕ).
Конденсатор можно выбрать из расчета 70 микрофарад на 1 киловатт мощности двигателя. Емкость пускового конденсатора рассчитывается как Cп=2,5 х Cр.
При выборе схемы подключения, нужно учесть параметры двигателя. Если на табличке указаны значения 380/220 В, для включения в сеть 220 В обмотки соединять нужно только «треугольником». Если указано значение только 380 В, нужно разобрать двигатель, найти точку соединения обмоток и вывести все выводы на клеммник.
Для подключения электродвигателей применяют металлобумажные и электролитические конденсаторы. Первые рассчитаны на длительную работу, хорошо выдерживают коммутационные перенапряжения. К недостаткам металлобумажных конденсаторов относится небольшая емкость. Для запуска электродвигателя необходимо параллельно подключить несколько элементов в одну конденсаторную батарею.
К недостаткам металлобумажных конденсаторов относится небольшая емкость. Для запуска электродвигателя необходимо параллельно подключить несколько элементов в одну конденсаторную батарею.
Электролитические конденсаторы компакты и обладают значительной емкостью. При выборе устройств необходимо обратить внимание на номинальное напряжение.
Для электродвигателей в сети 220 В применяют элементы не менее чем на 400-450 В. При коммутациях возникают импульсные броски, при заниженном напряжении, емкостные элементы быстро выходят из строя.
Целесообразно использовать специальные конденсаторы для электродвигателей.
Работа трехфазного двигателя от однофазной сети имеет ряд недостатков. Потери мощности составляют 30-40%, то есть мощность электрической машины в таком режиме равна 60-70% от номинального значения, указанного производителем. При этом также наблюдается повышенный шум при работе, избыточный нагрев обмоток.
Подключение 3 фазного двигателя в однофазную сеть через частотный преобразователь
Преобразователи частоты (ПЧ) – устройства для управления электродвигателей переменного тока. Оборудование позволяет регулировать скорость вращения и момент на валу изменением частоты питающего напряжения. Однофазные ПЧ могут применяться для включения трехфазных двигателей к сети 220 В.
Оборудование позволяет регулировать скорость вращения и момент на валу изменением частоты питающего напряжения. Однофазные ПЧ могут применяться для включения трехфазных двигателей к сети 220 В.
Оборудование создает симметричные токи во всех трех фазах и позволяет устранить такие недостатки пуска через конденсатор как:
- Невысокий момент на валу при пуске.
- Повышенный нагрев обмоток.
- Избыточный шум при работе.
- Низкий к.п.д.
Для подключения к сети 220 В выбирают однофазный ПЧ. Включать трехфазное устройство в однофазную сеть запрещено. Запас мощности преобразователя частоты должен составлять не меньше 2 кВт.
При работе 3 фазного двигателя в однофазной сети наблюдаются значительные броски напряжения и тока, при недостатке мощности преобразователя работа привода будет нестабильна.
Защита будет отключать устройство и выдавать сообщения об ошибках.
Подключение осуществляется в следующем порядке:
- Проверка состояния двигателя. При этом определяют плотное прилегание крышек корпуса, исправность подшипников. Желательно измерить сопротивление обмоток. На этом же этапе определяют концы и начала обмоток статора.
- Соединение обмоток по схеме «треугольник». Для подключения в однофазную сеть через ПЧ необходимо соединить обмотки так, чтобы межфазное напряжение составляло 220 В.
- Подключение двигателя к частотному преобразователю. Для этого применяют экранированные кабели, рекомендованной производителем марок, сечением, отвечающем мощности выбранного ПЧ. Подключение осуществляется через емкостные входы преобразователя, внешние конденсаторы при этом не нужны.
- Настройка. При этом задаются параметры пусковой и рабочей емкости, вводят другие характеристики электродвигателя. Большинство ПЧ имеют функции автоматического определения параметров двигателя.
 При этом определяют плотное прилегание крышек корпуса, исправность подшипников. Желательно измерить сопротивление обмоток. На этом же этапе определяют концы и начала обмоток статора.
При этом определяют плотное прилегание крышек корпуса, исправность подшипников. Желательно измерить сопротивление обмоток. На этом же этапе определяют концы и начала обмоток статора.Далее выполняют первый пуск. В процессе выявляют и устраняют ошибки подключения и настройки, проверяют корректность работы привода в разных режимах.
Преимущества подключения трехфазного двигателя к сети 220 В через ПЧ
Подключение через частотный преобразователь позволяет отказаться от внешних конденсаторов. Устройства позволяют задавать оптимальную емкость для старта и корректной работы привода. Преобразователи частоты:
- Осуществляют регулирование скорости и момента. При этом конденсаторные схемы работают только в односкоростном режиме.
- Обеспечивают оптимальный режим пуска, разгона и остановки. Преобразователь частоты огранивает пусковые токи, позволяет задавать время разгона и торможения.
- Защищают двигатель от перегрева, перегрузок, коротких замыканий, заклинивания вала. ПЧ отключает привод при возникновении аварий и ненормальных режимов работы.
- Позволяют подключать внешние датчики, а также удаленное оборудование. При помощи преобразователя частоты можно регулировать производительность насосов, другого оборудования по заданным программам.
- Выводят сообщения с кодом ошибки. При аварии или отклонении режима работы привода от нормы, на дисплей ПЧ выводится код, позволяющий определить причину без диагностики двигателя.
 При аварии или отклонении режима работы привода от нормы, на дисплей ПЧ выводится код, позволяющий определить причину без диагностики двигателя.
При аварии или отклонении режима работы привода от нормы, на дисплей ПЧ выводится код, позволяющий определить причину без диагностики двигателя.К недостаткам подключения 3 фазного двигателя через преобразователь частоты относят завышенную мощность устройства и генерацию паразитных гармоник. Кроме того, при применении старых двигателей, длительно бывших в эксплуатации, сложно определить фактические параметры электрической машины и правильно выбрать ПЧ.
Заключение
При включении трехфазного двигателя в однофазную сеть существенно изменяются характеристики электрической машины.
Из-за значительных недостатков такой метод в промышленном электроприводе не применяется, и допускается только как исключительная мера.
Например, при необходимости экстренного восстановления работоспособности оборудования. Такое подключение допустимо только для маломощных электродвигателей.
Работа трехфазных устройств в сети 220 В широко применяется в приводе домашних станков и оборудования.
 Применение ПЧ частоты имеет неоспоримые преимущества перед пуском через емкостные элементы.
Применение ПЧ частоты имеет неоспоримые преимущества перед пуском через емкостные элементы.Частотный преобразователь снижает нагрев и шум двигателей, повышает коэффициент мощности, позволяет регулировать частоту вращения вала.
Кроме того, устройство обеспечивает защиту оборудования, позволяет осуществлять реверс двигателя, избавляет от необходимости сборки сложных схем управления.
Для исключения ошибок при выборе ПЧ лучше обратиться в службу технической поддержки производителя.
Принцип работы частотного преобразователя для асинхронного двигателя
Трехфазные асинхронные двигатели нашли самое широкое применение в промышленности и других областях. Современное оборудование просто невозможно представить без этих агрегатов.
Одной из важнейших составляющих рабочего цикла машин и механизмов является их плавный пуск и такая же плавная остановка после выполнения поставленной задачи. Такой режим обеспечивается путем использования преобразователей частоты.
Эти устройства проявили себя наиболее эффективными в больших электродвигателях, обладающих высокой мощностью.
https://www.youtube.com/watch?v=HIRReK891qI
С помощью преобразователей частоты успешно выполняется регулировка пусковых токов, с возможностью контроля и ограничения их величины до нужных значений.
Для правильного использования данной аппаратуры необходимо знать принцип работы частотного преобразователя для асинхронного двигателя. Его применение позволяет существенно увеличить срок службы оборудования и снизить потери электроэнергии.
Электронное управление, кроме мягкого пуска, обеспечивает плавную регулировку работы привода в соответствии с установленным соотношением между частотой и напряжением.
Что такое частотный преобразователь
Основной функцией частотных преобразователей является плавная регулировка скорости вращения асинхронных двигателей. С этой целью на выходе устройства создается трехфазное напряжение с переменной частотой.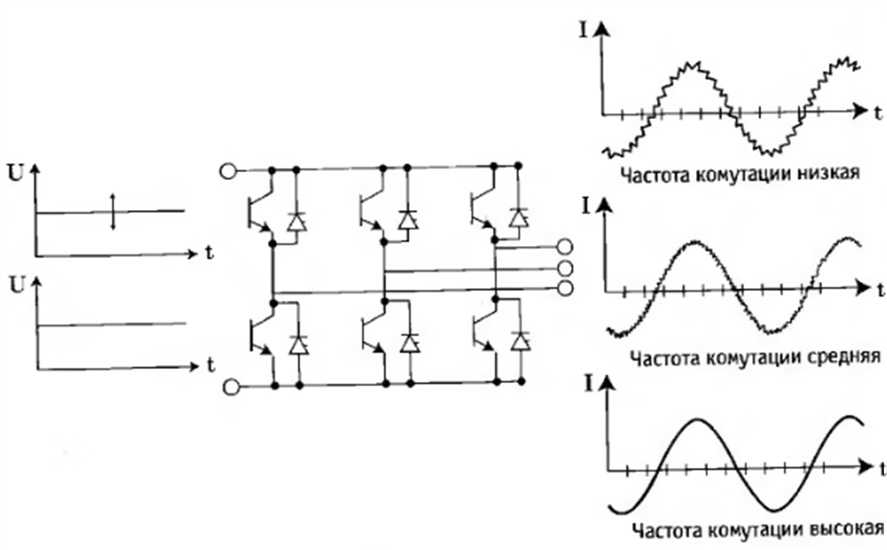
Преобразователи частоты нередко называются инверторами. Их основной принцип действия заключается в выпрямлении переменного напряжения промышленной сети.
Для этого применяются выпрямительные диоды, объединенные в общий блок. Фильтрация тока осуществляется конденсаторами с высокой емкостью, которые снижают до минимума пульсации поступающего напряжения.
В этом и заключается ответ на вопрос для чего нужен частотный преобразователь.
В некоторых случаях в схему может быть включена так называемая цепь слива энергии, состоящая из транзистора и резистора с большой мощностью рассеивания. Данная схема применяется в режиме торможения, чтобы погасить напряжение, генерируемое электродвигателем. Таким образом, предотвращается перезарядка конденсаторов и преждевременный выход их из строя.
В результате использования частотников, асинхронные двигатели успешно заменяют электроприводы постоянного тока, имеющие серьезные недостатки. Несмотря на простоту регулировки, они считаются ненадежными и дорогими в эксплуатации. В процессе работы постоянно искрят щетки, а электроэрозия приводит к износу коллектора.
В процессе работы постоянно искрят щетки, а электроэрозия приводит к износу коллектора.
Двигатели постоянного тока совершенно не подходят для взрывоопасной и запыленной среды.
Генератор на постоянных магнитах
В отличие от них, асинхронные двигатели значительно проще по своему устройству и надежнее, благодаря отсутствию подвижных контактов. Они более компактные и дешевые в эксплуатации. К основному недостатку можно отнести сложную регулировку скорости вращения традиционными способами.
Для этого было необходимо изменять питающее напряжение и вводить дополнительные сопротивления в цепь обмоток. Кроме того, применялись и другие способы, которые на практике оказывались неэкономичными и не обеспечивали качественной регулировки скорости.
Но, после того как появился преобразователь частоты для асинхронного двигателя, позволяющий плавно регулировать скорость в широком диапазоне, все проблемы разрешились. Одновременно с частотой изменяется и подводимое напряжение, что позволяет увеличить КПД и коэффициент мощности электродвигателя. Все это позволяет получить высокие энергетические показатели асинхронных двигателей, продлить срок их эксплуатации.
Все это позволяет получить высокие энергетические показатели асинхронных двигателей, продлить срок их эксплуатации.
Принцип действия частотного преобразователя
Эффективное и качественное управление асинхронными электродвигателями стало возможно за счет использования совместно с ними частотных преобразователей. Общая конструкция представляет собой частотно-регулируемый привод, который позволил существенно улучшить технические характеристики машин и механизмов.
В качестве управляющего элемента данной системы выступает преобразователь частоты, основной функцией которого является изменение частоты питающего напряжения.
Его конструкция выполнена в виде статического электронного узла, а формирование переменного напряжения с заданной изменяемой частотой осуществляется на выходных клеммах.
Таким образом, за счет изменения амплитуды напряжения и частоты регулируется скорость вращения электродвигателя.
Управление асинхронными двигателями осуществляется двумя способами:
- Скалярное управление действует в соответствии с линейным законом, согласно которому амплитуда и частота находятся в пропорциональной зависимости между собой. Изменяющаяся частота приводит к изменениям амплитуды поступающего напряжения, оказывая влияние на уровень крутящего момента, коэффициент полезного действия и коэффициент мощности агрегата. Следует учитывать зависимость выходной частоты и питающего напряжения от момента нагрузки на валу двигателя. Для того чтобы момент нагрузки был всегда равномерным, отношение амплитуды напряжения к выходной частоте должно быть постоянным. Данное равновесие как раз и поддерживается частотным преобразователем.
- Векторное управление удерживает момент нагрузки в постоянном виде во всем диапазоне частотных регулировок. Повышается точность управления, электропривод более гибко реагирует на изменяющуюся выходную нагрузку. В результате, момент вращения двигателя находится под непосредственным управлением преобразователя. Нужно учитывать, что момент вращения образуется в зависимости от тока статора, а точнее – от создаваемого им магнитного поля. Под векторным управлением фаза статорного тока изменяется. Эта фаза и есть вектор тока осуществляющий непосредственное управление моментом вращения.
 Изменяющаяся частота приводит к изменениям амплитуды поступающего напряжения, оказывая влияние на уровень крутящего момента, коэффициент полезного действия и коэффициент мощности агрегата. Следует учитывать зависимость выходной частоты и питающего напряжения от момента нагрузки на валу двигателя. Для того чтобы момент нагрузки был всегда равномерным, отношение амплитуды напряжения к выходной частоте должно быть постоянным. Данное равновесие как раз и поддерживается частотным преобразователем.
Изменяющаяся частота приводит к изменениям амплитуды поступающего напряжения, оказывая влияние на уровень крутящего момента, коэффициент полезного действия и коэффициент мощности агрегата. Следует учитывать зависимость выходной частоты и питающего напряжения от момента нагрузки на валу двигателя. Для того чтобы момент нагрузки был всегда равномерным, отношение амплитуды напряжения к выходной частоте должно быть постоянным. Данное равновесие как раз и поддерживается частотным преобразователем.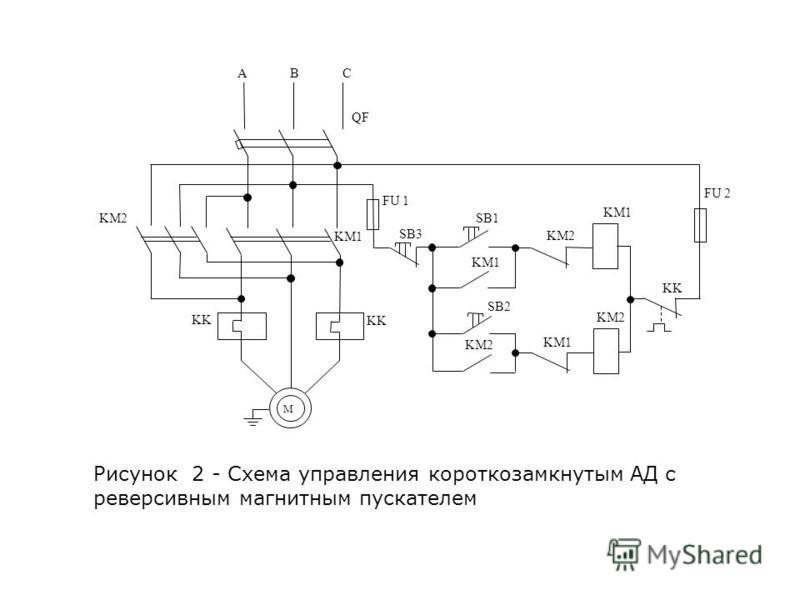 Эта фаза и есть вектор тока осуществляющий непосредственное управление моментом вращения.
Эта фаза и есть вектор тока осуществляющий непосредственное управление моментом вращения.Крановые электродвигатели
Настройка частотного преобразователя для электродвигателя
Для того чтобы преобразователь частоты для асинхронного двигателя в полном объеме выполнял свои функции, его необходимо правильно подключить и настроить. В самом начале подключения в сети перед прибором размещается автоматический выключатель.
Его номинал должен совпадать с величиной тока, потребляемого двигателем. Если частотник предполагается эксплуатировать в трехфазной сети, то автомат также должен быть трехфазным, с общим рычагом.
В этом случае при коротком замыкании на одной из фаз можно оперативно отключить и другие фазы.
Ток срабатывания должен обладать характеристиками, полностью соответствующими току отдельной фазы электродвигателя.
Если частотный преобразователь планируется использовать в однофазной сети, в этом случае рекомендуется воспользоваться одинарным автоматом, номинал которого должен в три раза превышать ток одной фазы.
Независимо от количества фаз, при установке частотника, автоматы не должны включаться в разрыв заземляющего или нулевого провода. Рекомендуется использовать только прямое подключение.
При правильной настройке и подключении частотного преобразователя, его фазные провода должны соединяться с соответствующими контактами электродвигателя.
Предварительно обмотки в двигателе соединяются по схеме «звезда» или «треугольник», в зависимости от напряжения, выдаваемого преобразователем.
Если оно совпадает с меньшим значением, указанным на корпусе двигателя, то применяется соединение треугольником. При более высоком значении используется схема «звезда».
Далее выполняется подключение частотного преобразователя к контроллеру и пульту управления, который входит в комплект поставки. Все соединения осуществляются в соответствии со схемой, приведенной в руководстве по эксплуатации.
Рукоятка должна находиться в нейтральном положении, после чего включается автомат. Нормальное включение подтверждается световым индикатором, загорающимся на пульте.
Нормальное включение подтверждается световым индикатором, загорающимся на пульте.
Для того чтобы преобразователь заработал, нажимается кнопка RUN, запрограммированная по умолчанию.
Принципиальная схема электродвигателя
После незначительного поворота рукоятки, двигатель начинает постепенно вращаться. Для переключения вращения в обратную сторону, существует специальная кнопка реверса.
Затем с помощью рукоятки настраивается нужная частота вращения. На некоторых пультах вместо частоты вращения электродвигателя, отображаются данные о частоте напряжения.
Поэтому рекомендуется заранее внимательно изучить интерфейс установленной аппаратуры.
Частотные преобразователи для асинхронных двигателей
Благодаря частотным преобразователям, работа современных асинхронных двигателей отличается высокой эффективностью, устойчивостью и безопасностью. Это особенно важно, поскольку каждый электродвигатель отличается индивидуальными особенностями режима работы.
Поэтому оптимизации параметров питания агрегатов с использованием преобразователей частоты придается большое значение. Когда частотный преобразователь выбирается для каких-либо конкретных целей, в этом случае должны обязательно учитываться его рабочие параметры.
Когда частотный преобразователь выбирается для каких-либо конкретных целей, в этом случае должны обязательно учитываться его рабочие параметры.
Нормальная работа устройства будет зависеть от типа электродвигателя, его мощности, диапазона, скорости и точности регулировок, а также от поддержания стабильного момента вращения вала.
Эти показатели имеют первостепенное значение и должны органично сочетаться с габаритами и формой аппарата.
Следует обратить особое внимание на то, как расположены элементы управления и будет ли удобно им пользоваться.
Выбирая устройство, необходимо заранее знать, в каких условиях оно будет эксплуатироваться. Если сеть однофазная, то и преобразователь должен быть таким же. То же самое касается и трехфазных аппаратов. Многое зависит от мощности асинхронных двигателей.
Если при запуске на валу необходим высокий пусковой момент, то и частотный преобразователь должен быть рассчитан на большее значение тока.
Особенности и схема подключения частотного преобразователя к разным типам электродвигателей
Частотные преобразователи используются для подключения различных электродвигателей и позволяют регулировать такие характеристики, как скорость вращения ротора, момент силы вала и защищают от перегрузок и перегрева. Также такие устройства дают возможность подключать трехфазное оборудование в однофазную систему без потери мощности и перегрева обмоток двигателя.
Также такие устройства дают возможность подключать трехфазное оборудование в однофазную систему без потери мощности и перегрева обмоток двигателя.
Разновидности частотных преобразователей
Современные частотные преобразователи различаются многообразием схем, которые можно сгруппировать в несколько категорий:
- Высоковольтные двухтрансформаторные
Принцип работы такого прибора заключается в последовательном преобразовании напряжения при помощи понижающего и повышающего трансформатора, преобразования частоты низковольтным преобразователем, а также сглаживание пиковых перенапряжений на выходе с помощью синусоидального фильтра.
Схема работы выглядит следующим образом: питающее напряжение 6000 В подается на понижающий трансформатор и на его выходе получают 400 (660) В, далее оно подается на низковольтный преобразователь и после изменения частоты подается на повышающий трансформатор для увеличения значения напряжения до начального.
- Тиристорные преобразователи
Такие устройства состоят из многоуровневых частотных преобразователей на основе тиристоров. Конструктивно они состоят из трансформатора (обеспечивающего понижение питающего напряжения), диодов (для выпрямления) и конденсаторов (для сглаживания). Также для уменьшения уровня высших гармоник применяют многопульсные схемы.
Тиристорные преобразователи имеют высокий КПД до 98 % и большой диапазон выходных частот 0-300 Гц, что для современного оборудования является положительной и востребованной характеристикой.
- Транзисторные частотные преобразователи
Такие частотные преобразователи являются высокотехнологичными устройствами, которые собираются на транзисторах различного типа. Конструктивно они имеют транзисторные инверторные ячейки и многообмоточный сухой трансформатор специальной конструкции.
Управляют таким преобразователем с помощью микропроцессора, что позволяет тонко настраивать работу оборудования и контролировать весь процесс работы различных двигателей.
Транзисторные частотные преобразователи, так же, как и тиристорные, имеют высокий КПД и широкий диапазон регулирования частоты.
Как подключить частотный преобразователь
Для подключения частотного преобразователя к оборудованию, прежде всего необходимо убедиться в том, что характеристики такого прибора подходят для работы с конкретным электродвигателем. Также важно, чтобы напряжение питающей сети позволяло использовать данный частотный преобразователь.
При установке и подключении ЧП необходимо, чтобы условия эксплуатации соответствовали классу защищённости от влаги и пыли, а также были выдержаны все расстояния от движущихся частей машин и механизмов, от людских проходов и электрооборудования и аппаратуры.
Схема подключения ПЧ
Частотные преобразователи бывают как для трехфазных сетей, так и для однофазных. При этом к однофазной сети также можно подключать и трехфазный частотный преобразователь по схеме «треугольник», который дополнительно оснащен специальным конденсаторным блоком (при этом значительно падает мощность и понижается КПД устройства).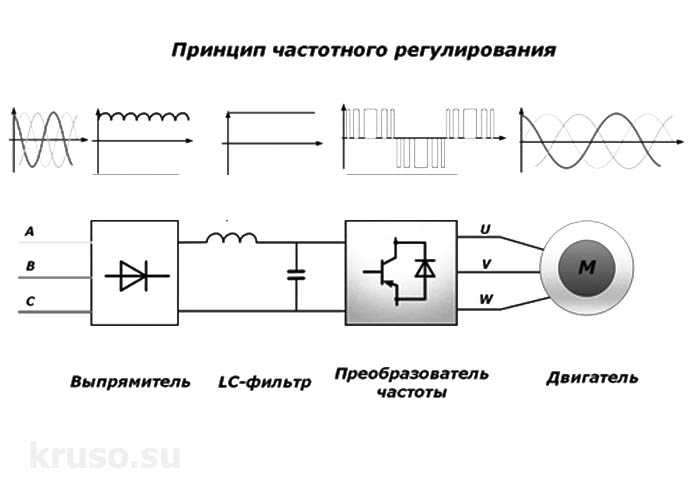 Подключение же трехфазного преобразователя в соответствующей сети производится по схеме «звезда».
Подключение же трехфазного преобразователя в соответствующей сети производится по схеме «звезда».
Управление частотным преобразователем может осуществляться с использованием контакторов, встроенных в различные релейные схемы, микропроцессорных контроллеров и компьютерного оборудования, а также вручную. Поэтому при подключении автоматизированных систем требуется участие специалистов по наладке такого оборудования.
Обратите внимание! Частотный преобразователь может иметь дополнительные настройки, выполняемые с помощью DIP-переключателей, а также встроенным программным обеспечением.
Принцип подключения частотных преобразователей в целом одинаковый, но может несколько отличаться для разных моделей. Поэтому правильным решением будет перед подключением изучить инструкцию, сопоставить характеристики устройств и убедиться в том, что устройство подключается по схеме, предложенной производителем.
Для трехфазного электродвигателя
Для трехфазного электродвигателя принцип подключения следующий: к клеммным колодкам на выходе трехфазного частотного преобразователя подключаются фазные проводники к каждому выводу, а на вход подключаются фазы питающего напряжения. В данном случае всегда реализуется схема подключения «звезда» в двигателе. При подключении трехфазного двигателя через частотный преобразователь к однофазной сети применяют схему «треугольник».
В данном случае всегда реализуется схема подключения «звезда» в двигателе. При подключении трехфазного двигателя через частотный преобразователь к однофазной сети применяют схему «треугольник».
Трансформаторы тока: устройство, принцип действия и типы
Для однофазного электродвигателя
Для однофазного электродвигателя необходимо подключить фазный и нулевой проводник к преобразователю частоты, а обмотки двигателя подключаются к соответствующим клеммам на выходе частотного преобразователя.
Например, обмотка L1 будет подключаться к клемме А преобразователя, обмотка L2 к клемме B, а общий провод к клемме C.
Если применяется конденсаторный двигатель, то от частотного преобразователя фаза подключается к двигателю, а конденсатор обеспечивает сдвиг фаз.
Во всех случаях, при подключении частотных преобразователей и электродвигателей, всегда следует применять устройства защиты: автоматические выключатели и УЗО, рассчитанные на высокие пусковые токи, а также обязательно подключать заземляющий проводник к корпусам устройств.
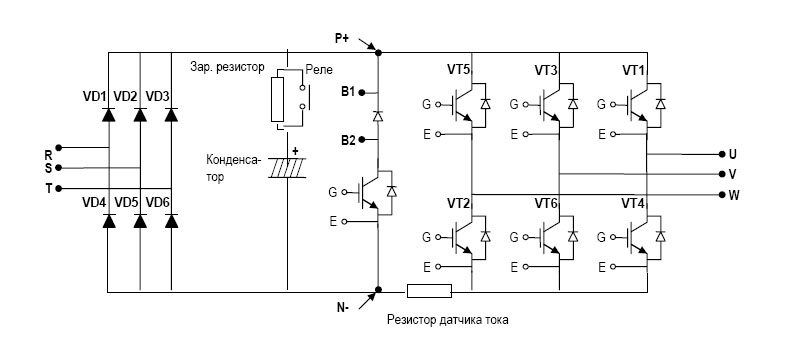 Также важно обратить внимание на сечение проводников электрокабеля, которым будет производится подключение – сечение должно соответствовать параметрам подключаемого частотного преобразователя и нагрузки.
Также важно обратить внимание на сечение проводников электрокабеля, которым будет производится подключение – сечение должно соответствовать параметрам подключаемого частотного преобразователя и нагрузки.структурная схема и основные узлы
Применяется преобразователь частоты для асинхронного двигателя в нескольких случаях. Во-первых, для изменения скорости вращения ротора. Во-вторых, для осуществления настроек, например времени торможения и разгона, изменения степени защиты. В-третьих, для преобразования однофазного напряжения в трехфазное. Не всегда есть возможность реализовать питание асинхронного двигателя от трехфазной сети. А для его нормальной работы и достижения максимальной мощности требуется именно такая сеть. К сожалению, в частных домах сделать трехфазное напряжение достаточно сложно. А преобразователь частоты позволяет осуществить правильное питание двигателя.
Выпрямительный каскад
Любой преобразователь, даже самый сложный по конструкции, имеет в своем составе несколько блоков. Первый – это выпрямительный каскад, который служит для преобразования переменного тока в постоянный. В зависимости от того, от какой сети производится питание, необходимо использовать различные схемы выпрямителей. Так, при включении в сеть переменного однофазного тока достаточно использовать однополупериодный выпрямитель. Стоит заметить, что ротор асинхронного двигателя имеет короткозамкнутые витки, поэтому в питании не нуждается.
Первый – это выпрямительный каскад, который служит для преобразования переменного тока в постоянный. В зависимости от того, от какой сети производится питание, необходимо использовать различные схемы выпрямителей. Так, при включении в сеть переменного однофазного тока достаточно использовать однополупериодный выпрямитель. Стоит заметить, что ротор асинхронного двигателя имеет короткозамкнутые витки, поэтому в питании не нуждается.
Реализовать его можно при помощи одного полупроводникового диода. Но лучшими характеристиками обладает мостовой выпрямитель: потерь напряжения меньше. В качестве полупроводника используется кремний. Если решите самостоятельно изготовить преобразователь частоты для асинхронного двигателя, то для выпрямителя необходимо осуществлять подбор элементов по величине обратного тока, проводимости. Это позволит улучшить характеристики устройства.
Блок фильтрации напряжения
После выпрямительного каскада следует блок фильтров. В простейшем варианте это индуктивность (дроссель), включенная в разрыв плюса. Между плюсом и минусом включается электролитический конденсатор. С его помощью проводится избавление от всех переменных составляющих, которые остаются в выпрямленном напряжении. В результате убираются все пульсации. Если подключить выход фильтра к осциллографу и взглянуть на монитор, то можно увидеть, что линии прямые, без лишних пульсаций.
Между плюсом и минусом включается электролитический конденсатор. С его помощью проводится избавление от всех переменных составляющих, которые остаются в выпрямленном напряжении. В результате убираются все пульсации. Если подключить выход фильтра к осциллографу и взглянуть на монитор, то можно увидеть, что линии прямые, без лишних пульсаций.
Но схема асинхронного двигателя такова, что запитывать его можно только переменным током. А на выходе фильтра возникает постоянный. Следовательно, требуется вернуть все на круги своя, сделать из постоянного напряжения переменное. Причем его значение должно быть 220 вольт (при замере между фазой и нулем). А количество фаз – три. Только при этом условии получится обеспечить работу асинхронного двигателя в нормальном режиме.
Блок инвертора
Данный каскад служит для преобразования постоянного тока в переменный. Именно в этом блоке можно проводить регулировку и изменение параметров тока на выходе. Основа инвертора – это мощные транзисторы.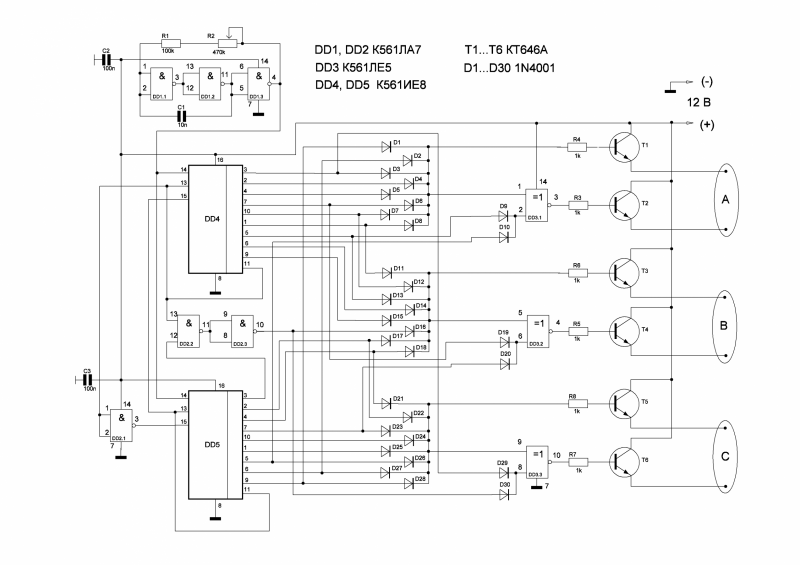 Любой современный преобразователь частоты для асинхронного двигателя в этом каскаде содержит сборку из шести IGBT-транзисторов. Всего используется по два полупроводника на каждую фазу. Управление ими производится по базе, включение p-n-переходов произведено последовательно. В точке их соединения снимаются три фазы. Это видно из структурной схемы, приведенной выше.
Любой современный преобразователь частоты для асинхронного двигателя в этом каскаде содержит сборку из шести IGBT-транзисторов. Всего используется по два полупроводника на каждую фазу. Управление ими производится по базе, включение p-n-переходов произведено последовательно. В точке их соединения снимаются три фазы. Это видно из структурной схемы, приведенной выше.
При изготовлении преобразователя частоты или проведении ремонта требуется осуществлять подбор силовых сборок по выходному току. Пожалуй, это единственный параметр, которого нужно придерживаться. Также следует учитывать возможности микропроцессорной системы управления. Не все сборки транзисторов позволяют изменять те или иные характеристики инверторного каскада. Поэтому при выборе силовых транзисторов обратите внимание на возможность управления.
Микропроцессорная система управления
В основе лежит несложный микроконтроллер, который и обеспечивает работу всей системы. Это небольшая микросхема, которая может иметь как 16 выводов, так и 32, и 64, и 128.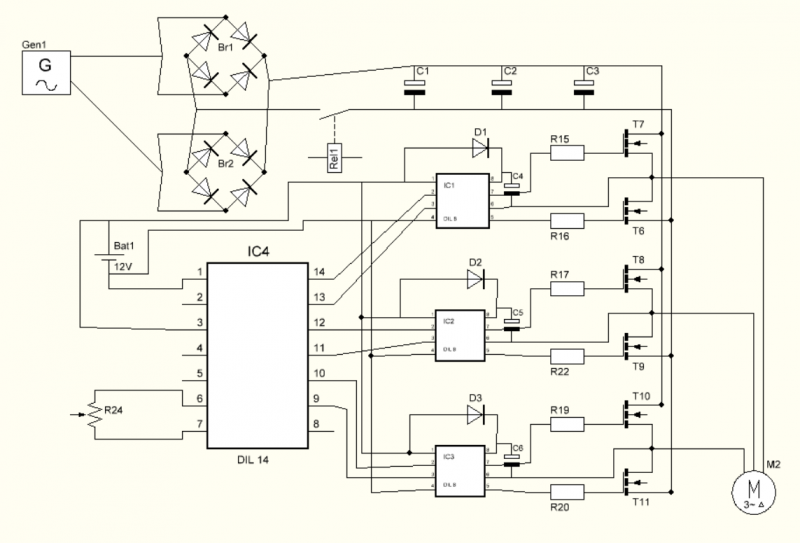 Все зависит от того, сколько портов ввода-вывода имеется. Для управления преобразователем частоты необходимо контролировать несколько параметров. Во-первых, производить отключение при превышении температуры корпуса ПЧ. Во-вторых, включать вентиляторы при достижении некоторого значения температуры. В-третьих, проводить замер тока на каждой фазе выходного каскада. Частота асинхронного двигателя должна изменяться, делается это при помощи установленного переменного резистора.
Все зависит от того, сколько портов ввода-вывода имеется. Для управления преобразователем частоты необходимо контролировать несколько параметров. Во-первых, производить отключение при превышении температуры корпуса ПЧ. Во-вторых, включать вентиляторы при достижении некоторого значения температуры. В-третьих, проводить замер тока на каждой фазе выходного каскада. Частота асинхронного двигателя должна изменяться, делается это при помощи установленного переменного резистора.
Защита преобразователя частоты
Если контроль температуры производится при помощи простейших датчиков, то для защиты по току необходимо использовать специальные трансформаторы. Они так и называются – трансформаторы тока. Это небольшие катушки на магнитопроводе, сквозь который проходит вывод фазы. Следовательно, остается только составить несложные алгоритмы, о которых будет рассказано ниже. Что касается программирования функций, то для этой цели необходимо предусмотреть подключение к микроконтроллеру нескольких кнопок с нормально разомкнутыми контактами.
Алгоритм работы микроконтроллера
При самостоятельном изготовлении ПЧ потребуется использовать множество знаний, включая и программирование. Так, преобразователи частоты для двигателей должны иметь защиту. Следовательно, при составлении алгоритма работы микроконтроллерной системы управления необходимо прописать определенные параметры, при которых происходит аварийное отключение устройства. Например, указывается предельно допустимое значение температуры корпуса устройства, а также тока, протекающего в каждой фазе на выходе.
Кроме того, необходимо учесть, что при нулевом значении потребляемого тока в одной фазе (при условии, что в других больше) должно производиться аварийное отключение. Исходя из всего этого, нужно составить алгоритм работы, который записывается в микроконтроллер. Именно по этой схеме устройство и будет работать.
Преобразователь частоты для асинхронного двигателя должен также изменять скорость вращения ротора. Переменный резистор подключаете через делитель напряжения к порту ввода-вывода.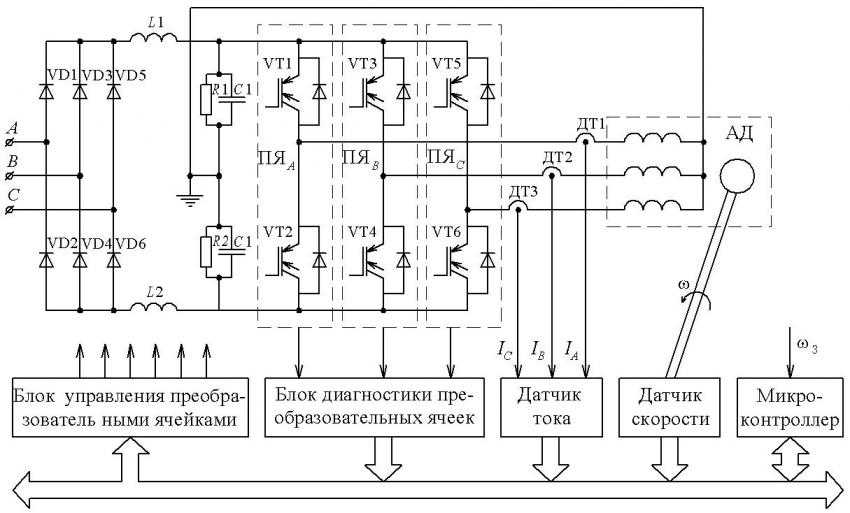 В алгоритме следует учесть, что при изменении сопротивления на данном входе контроллера нужно увеличивать или уменьшать частоту вращения ротора.
В алгоритме следует учесть, что при изменении сопротивления на данном входе контроллера нужно увеличивать или уменьшать частоту вращения ротора.
Частотный преобразователь — принцип работы, схема подключения частотника
Чтобы подключить частотник к асинхронному трёхфазному двигателю, следует хотя бы на минимальном уровне разбираться в схеме его подключения и принципах работы. Нижеприведённая информация позволяет изучить данную тему.
Принцип управления электродвигателем
Ротор электрического двигателя функционирует благодаря вращению электромагнитных полей под статорной обмоткой. Скорость движения ротора находится в зависимости от промышленной частоты питающей сети.
Стандартное её значение составляет 50Гц и вызывает соответственно пятьдесят колебательных периодов за секунду. На протяжении минуты количество оборотов увеличивается до трёх тысяч. Настолько же часто осуществляются обороты ротора подвергаемого воздействию электромагнитных полей.
При изменении уровня прилагаемой к статору частоты, появляется возможность управления вращательной скоростью ротора и соединяемого с ним привода.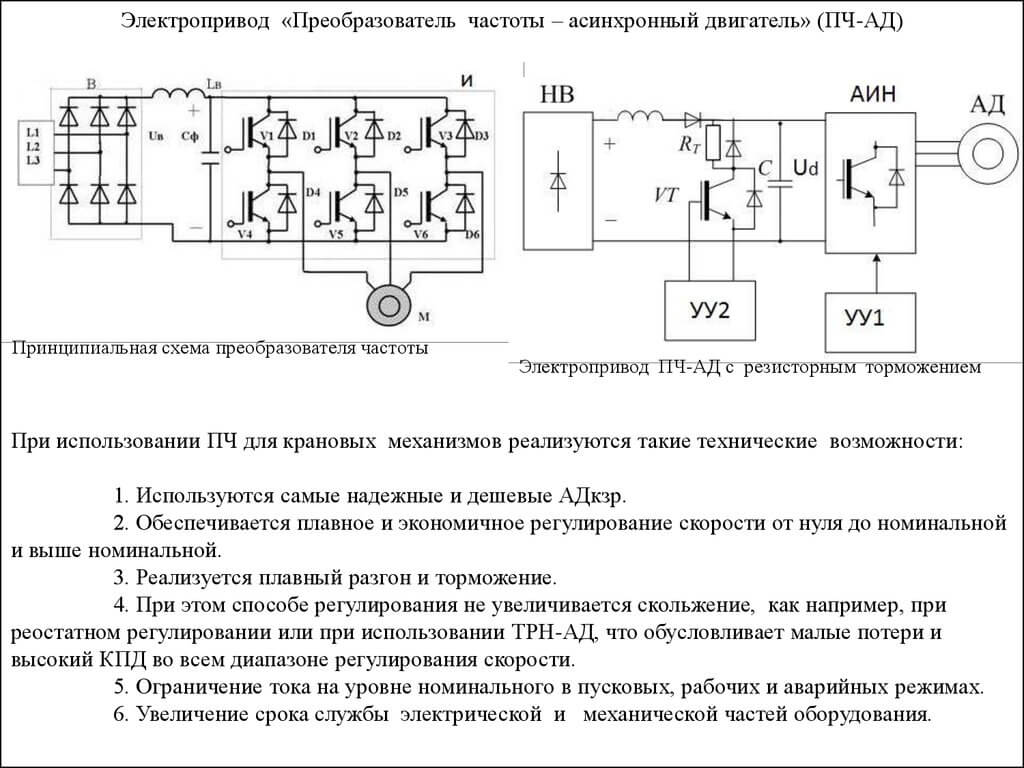 Именно благодаря этому принципу осуществляется управление электродвигателем.
Именно благодаря этому принципу осуществляется управление электродвигателем.
Классификация частотных преобразователей
По своим конструктивным различиям модели частотного преобразователя делятся на:
Индукционные.
Сюда относятся электрические двигатели имеющие асинхронный принцип работы. Данные устройства не отличаются высоким уровнем КПД и значительной эффективностью. Ввиду этих качеств они не имеют большой доли в общем числе преобразователей и редко применяются.
Электронные.
Пригодны для осуществления плавного управления оборотами в машинах асинхронного и синхронного типа. Управление в электронных моделях может производиться двумя способами:
Скалярный (согласно предварительно введённым параметрам взаимозависимости вращательной V и частоты).
Наиболее простой подход к управлению, довольно неточный.
Векторный.
Отличительной характеристикой является точность управления.
Векторное управление преобразователем частот
Принцип работы векторного управления заключается в следующем: при нём оказывается воздействие на магнитный поток, изменяя направление его “пространственного вектора” и регулирующий роторную частоту поля.
Создать рабочий алгоритм частотного преобразователя с векторным управлением можно при помощи двух способов:
Бессенсорное управление.
Осуществляется за счёт назначения зависимостей чередования между последовательностями широтно-импульсных модуляций инвертора для предварительно составленных алгоритмов. Регуляция размера амплитуды и выходной частоты, которую имеет напряжение, осуществляется в соответствии со скольжением и нагрузочным током, но обратная связь от роторной вращательной скорости не учитывается.
Потокорегулирование.
Рабочие токи устройства регулируются. При этом они раскладываются на активный и реактивный компонент. Это облегчает возможность внесения корректирующих изменений в рабочий процесс (изменение амплитуд, частот, векторных углов, которые имеет напряжение на выходе).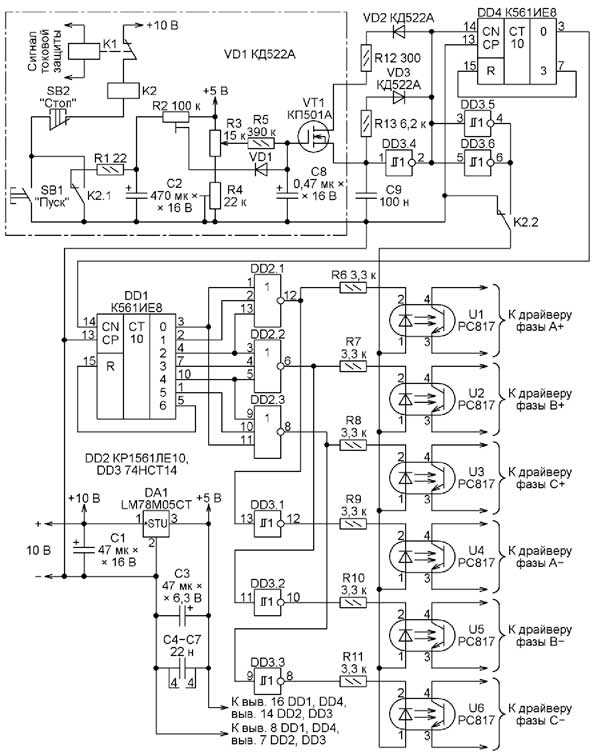
Способствует повышению точности и диапазона регуляции вращений асинхронного двигателя. Весьма актуален такой подход для устройства с малыми оборотами и высоким уровнем двигательных нагрузок.
В целом, схема векторного управления более прочих подходит для динамической регулировки вращающегося момента трёхфазного асинхронного двигателя.
Подключение транзисторных ключей
Все шесть IGBT-транзисторов соединяются с соответствующими диодами обратного тока с соблюдением встречно-параллельной схемы. После по цепи силового подключения, образуемой каждым транзистором происходит прохождение активного тока асинхронного двигателя, с последующим направлением его реактивной составляющей через диоды. С целью обеспечения безопасности инвертора и асинхронного двигателя от воздействия сторонних электрических помех конструкция преобразователя частоты может включать в себя помехозащитные фильтры. Если промышленные источники постоянного тока имеют рабочее напряжение в 220 В, то они также могут использоваться для запитывания инверторов.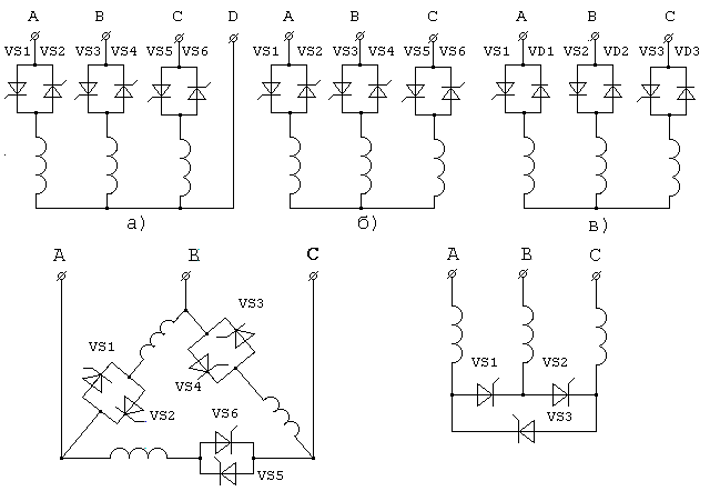
Как подключить частотник к асинхронному двигателю?
Используемый для управления частотой напряжения преобразователь зачастую используется для энергоснабжения трёхфазных двигателей. С помощью преобразователя частоты также возможно обеспечить присоединение такого устройства к однофазной сети, предотвратив снижение его рабочей мощности. Этим они значимо выигрывают у конденсаторов, которые при подключении не могут сохранить исходный уровень мощности. Подробней про применение частотника для трехфазника- смотрите здесь.
При подключении частотного преобразователя следует предварительно разместить автоматический выключатель, функционирующий от тока сети по значению равного номинальному (или наиболее близкого к таковому) уровню потребления тока в двигателе. Если используется частотник трёхфазного типа, то соответственно следует воспользоваться трёхфазным автоматом с общим рычагом. Такой вариант обеспечивает быстрое обесточивание всех фаз сразу при замыкании на одной из них.
Ток срабатывания по своим характеристикам должен совпадать с однофазным током электрического двигателя.
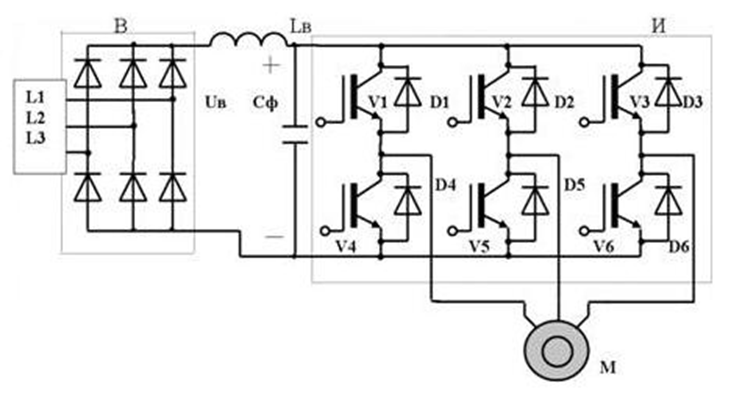
В случае же, если для частотного преобразователя свойственно однофазное питание, то следует применить одинарный автомат, который подходит для работы с утроенным однофазным током.
Однако, при любых обстоятельствах установку частотного преобразователя нельзя осуществлять через включение автомата в месте разрыва нулевых или заземляющих проводов. В таких условиях подразумевается только прямое включение автомата.
Дальнейшую настройку преобразователя частоты осуществляют через соединение с контактами электрического двигателя. Используются при этом фазные провода. Но предварительно производится соединение обмоток электрического двигателя по схеме “звезда” или “треугольник”.
Работа по той или иной схеме базируется на том, каков тип преобразователя частоты и характер производимого им напряжения.
По стандарту корпус каждого двигателя имеет отметку с двумя значениями, которым может равняться напряжение. Если частотник продуцирует напряжение соответствующее нижней границы, то соединение осуществляется по типу “треугольник”. В остальных случаях для использования принцип “звезды”.
В остальных случаях для использования принцип “звезды”.
Месторасположение управляющего пульта, обязательно прилагающегося при покупке частотного преобразователя, следует подбирать тщательно, чтобы обеспечить наибольшее удобство пользования.
Подключения пульта управления осуществляется по схеме обозначенной в прилагаемой к преобразователю инструкции. После рукоятка фиксируется на нулевом уровне, и автомат включается. В этот момент должно наблюдаться свечение светового индикатора.
Для использования частотного преобразователя, следует надавить кнопку “RUN” (она уже запрограммирована надлежащим образом). Далее делается лёгкий поворот рукоятки, провоцирующий старт постепенного вращения электрического двигателя. Если вращение осуществляется в направлении, противоположном необходимому, то следует нажать реверс. После при помощи рукоятки настраивается требуемая частота вращения устройства. При этом следует учитывать, что на корпусе пульта управления зачастую прописаны не уровни частоты вращения двигателя, выражаемые в оборотах в минуту, а частоты, которую имеет питающее напряжение, выражаемое в герцах.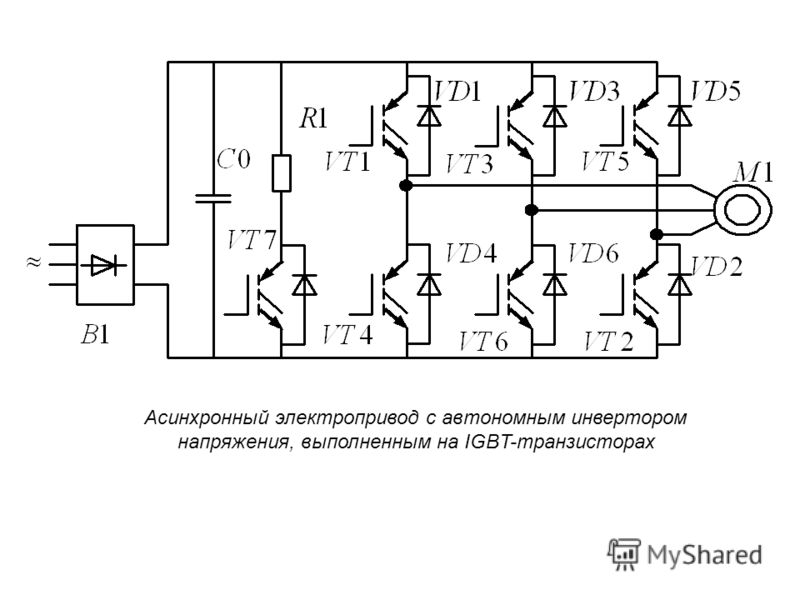
Чтобы ограничить пусковой ток и снизить пусковой момент в момент пуска асинхронного двигателя с уровнем мощности больше 5000Вт, используется подключение типа “звезда-треугольник”. До достижения номинала скорости задействуется схема подключения частотного преобразователя “звезда”, а после питание осуществляется по схеме “треугольник”. В момент переключения уровень пускового тока уменьшается в три раза относительно прямого пуска. При начале работы по второй схеме до момента разгона двигателей ток возрастёт до уровня прямого пуска. Такой варианты наиболее актуален для, имеющих большую маховую массу, позволяя после разгона сбросить нагрузку.
Логично, что использование такой схемы возможно только с двигателями, рассчитанными на подключения обоих типов.
Проведение работы по схеме “звезда-треугольник” всегда чревато резкими скачками уровня тока в противовес плавному нарастанию в условиях прямого пуска. В момент смены соединения скорость резко снижается и увеличить её можно только увеличив силу тока.
Частотный преобразователь.Как подключить трёхфазный электродвигатель от 220В.
Смотрите это видео на YouTube
Схема регулятора оборотов однофазного двигателя — Dudom
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.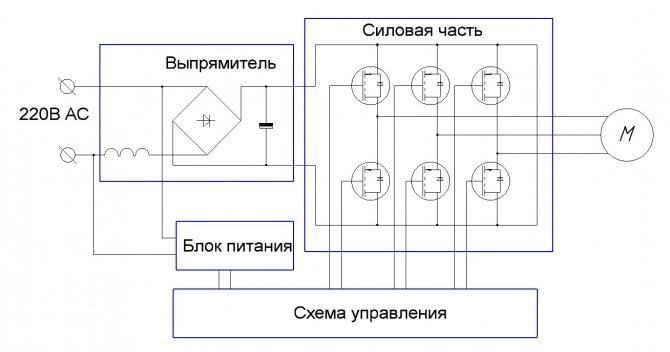
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2— скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т. к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
- 0 commentsПрименение Октябрь 27, 2016
С все более увеличивающимся ростом автоматизации в бытовой сфере появляется необходимость в современных системах и устройствах управления электродвигателями.
Управление и преобразование частоты в небольших по мощности однофазных асинхронных двигателях, запускаемых в работу с помощью конденсаторов, позволяет экономить электроэнергию и активирует режим энергосбережения на новом, прогрессивном уровне.
Принцип работы однофазной асинхронной машины
В основе работы асинхронного двигателя лежит взаимодействие вращающегося магнитного поля статора и токов, наводимых им в роторе двигателя. При разности частоты вращения пульсирующих магнитных полей возникает вращающий момент. Именно этим принципом руководствуются при регулировании скорости вращения асинхронного двигателя с помощью частотного преобразователя.
Электродвигатель по факту может считаться двухфазным, но у него только одна рабочая обмотка статора, вторая, расположенная относительно главной под углом в 90 о является пусковой.
Пусковая обмотка занимает в конструкции статора 1/3 пазов, на главную обмотку приходится 23 паза статора.
Ротор однофазного двигателя коротко замкнутый, помещенный в неподвижное магнитное поле статора, начинает вращаться.
Рис.№1 Схематический рисунок двигателя, демонстрирующий принцип работы однофазного асинхронного двигателя.
Основные виды однофазных электроприводов
Кондиционеры воздуха, холодильные компрессоры, электрические вентиляторы, обдувочные агрегаты, водяные, дренажные и фекальные насосы, моечные машины используют в своей конструкции асинхронный трехфазный двигатель.
Все типы частотников преобразуют переменное сетевое напряжение в постоянное напряжение. Служат для формирования однофазного напряжения с регулируемой частотой и заданной амплитудой для управления вращения асинхронных двигателей.
Управление скоростью вращения однофазных двигателей
Существует несколько способов регулирования скорости вращения однофазного двигателя.
- Управление скольжением двигателя или изменением напряжения. Способ актуален для агрегатов с вентиляторной нагрузкой, для него рекомендуется использовать двигатели с повышенной мощностью. Недостаток способа – нагрев обмоток двигателя.
- Ступенчатое регулирование скорости вращения двигателя с помощью автотрансформатора.
Рис.№2. Схема регулировки с помощью автотрансформатора.
Достоинства схемы – напряжение выхода имеет чистую синусоиду. Способность трансформатора к перегрузкам имеет большой запас по мощности.
Недостатки – автотрансформатор имеет большие габаритные размеры.
Использование тиристорного регулятора оборотов двигателя. Применяются тиристорные ключи, подключенные встречно-параллельно.
Рис. №3.Схема тиристорного регулирования однофазного асинхронного электродвигателя.
При использовании для регулирования скорости вращения однофазных асинхронных двигателей, чтобы избежать негативного влияния индукционной нагрузки производят модификацию схемы. Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
Транзисторный регулятор напряжения
В схеме используется широтно-импульсная модуляция (ШИМ) с применением выходного каскада, построенного на использовании полевых или биполярных IGBT транзисторах.
Рис. №4. Схема использования ШИМ для регулирования однофазного асинхронного электродвигателя.
Частотное регулирование асинхронного однофазного электродвигателя считается основным способом регулирования частоты электродвигателя, мощности, эффективности использования, скорости и показателей энергосбережения.
Рис. №5. Схема управления электродвигателем без исключения из конструкции конденсатора.
Частотный преобразователь: виды, принцип действия, схемы подключения
Частотный преобразователь разрешает своему владельцу снизить энергопотребление и автоматизировать процессы в управлении оборудованием и производством.
Основные компоненты частотного преобразователя: выпрямитель, конденсатор, IGBT-транзисторы, собранные в выходной каскад.
Благодаря способности управлением параметрами выходной частоты и напряжения достигается хороший энергосберегающий эффект. Энергосбережение выражается в следующем:
- В двигателе поддерживается неизменный текущий момент ращения вала. Это обусловлено взаимодействием выходной частоты инверторного преобразователя с частотой вращения двигателя и соответственно, зависимостью напряжения и крутящего момента на валу двигателя. Значит, что преобразователь дает возможность автоматически регулировать напряжение на выходе при обнаружении превышающего норму значения напряжения с определенной рабочей частотой нужно для поддержания требуемого момента. Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
- Частотный преобразователь служит для регулировки действия насосных агрегатов (см. страницу). При получении сигнала, поступающего с датчика давления, частотник снижает производительность насосной установки. При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
Уменьшая частоту до 40Гц, уменьшается величина напряжения до 250В, означает, что уменьшается количество оборотов вращения насоса и потребление энергии снижается в 2,56 раз.
Рис. №6. Использование частотного преобразователя Speedrive для регулирования насосных агрегатов по систем CKEA MULTI 35.
Для повышения энергетической эффективности использования частотного преобразователя в управлении электродвигателем необходимо сделать следующее:
- Частотный преобразователь должен соответствовать параметрам электродвигателя.
- Частотник подбирается в соответствии с типом рабочего оборудования, для которого он предназначен. Так, частотник для насосов функционирует в соответствии с заложенными в программу параметрами для управления работой насоса.
- Точные настройки параметров управления в ручном и автоматическом режиме.
- Частотный преобразователь разрешает использовать режим энергосбережения.
- Режим векторного регулирования позволяет произвести автоматическую настройку управления двигателем.
Преобразователь частоты однофазный
Компактное устройство преобразования частоты служит для управления однофазными электродвигателями для оборудования бытового предназначения. Большинство частотных преобразователей обладает следующими конструктивными возможностями:
- Большинство моделей использует в своей конструкции новейшие технологии векторного управления.
- Они обеспечивают улучшенный вращающий момент однофазного двигателя.
- Энергосбережение введено в автоматический режим.
- Некоторые модели частотных преобразователей используют съемный пульт управления.
- Встроенный PLC контроллер (он незаменим для создания устройств сбора и передачи данных, для создания систем телеметрии, объединяет устройства с различными протоколами и интерфейсами связи в общую сеть).
- Встроенный ПИД регулятор (контролирует и регулирует температуру, давление и технологические процессы).
- Напряжение выхода регулируется в автоматическом режиме.
Рис.№7. Современный преобразователь Optidrive с основными функциональными особенностями.
Важно: Однофазный преобразователь частоты, питаясь от однофазной сети напряжением 220В, выдает три линейных напряжения, величина каждого из них по 220В. То есть, линейное напряжение между 2 фазами находится в прямой зависимости от величины выходного напряжения самого частотника.
Частотный преобразователь не служит для двойного преобразования напряжения, благодаря наличию в конструкции ШИМ-регулятора, он может поднять величину напряжения не более чем на 10%.
Главная задача однофазного преобразователя частоты – обеспечить питание как одно- так и трехфазного электродвигателя. В этом случае ток двигателя будет соответствовать параметрам подключения от трехфазной сети, и оставаться постоянным
Частотное регулирование однофазных асинхронных электродвигателей
Первое на что обращаем внимание при выборе частотника для своего оборудования – это соответствие сетевого напряжения и номинального значения тока нагрузки, на который рассчитан двигатель. Способ подключения выбирается относительно рабочего тока.
Главным в схеме подключения является наличие фазосдвигающего конденсатора, он служит для сдвига напряжения, поступающего на пусковую обмотку. Она служит для пускового включения двигателя, иногда после того, как двигатель заработал, пусковая обмотка вместе с конденсатором отключается, иногда остается включенной.
Схема подключения однофазного двигателя с помощью однофазного частотного преобразователя без использования конденсатора
Выходное линейное напряжение устройства на каждой фазе равно выходному напряжению частотника, то есть на выходе будет три напряжения линии, каждое по 220В. Для запуска может использоваться только пусковая обмотка.
Рис. №8. Схема присоединения однофазного асинхронного двигателя через конденсатор
Фазосдвигающий конденсатор не может обеспечить равномерный фазовый сдвиг в пределах границ частот инвертора. Частотник обеспечит равномерный сдвиг фаз. Для того, чтобы исключить из схемы конденсатор, нужно:
- Конденсатор стартера С1 удаляется.
- Вывод обмотки двигателя присоединяем к точке выхода напряжения частотника (используется прямая проводка).
- Точка А присоединяется к СА; В соединяется с СВ; W соединяется к СС, таким образом электродвигатель присоединится напрямую.
- Для включения в обратном направлении (обратная проводка) необходимо В присоединить к СА; А присоединить к СВ; W соединить с СС.
Рис. №9. Схема подключения однофазного асинхронного двигателя без использования конденсатора.
На видео — Частотный преобразователь. Подключение трехфазного двигателя в однофазную сеть 220В.
- 0 commentsПрименение Октябрь 27, 2016
С все более увеличивающимся ростом автоматизации в бытовой сфере появляется необходимость в современных системах и устройствах управления электродвигателями.
Управление и преобразование частоты в небольших по мощности однофазных асинхронных двигателях, запускаемых в работу с помощью конденсаторов, позволяет экономить электроэнергию и активирует режим энергосбережения на новом, прогрессивном уровне.
Принцип работы однофазной асинхронной машины
В основе работы асинхронного двигателя лежит взаимодействие вращающегося магнитного поля статора и токов, наводимых им в роторе двигателя. При разности частоты вращения пульсирующих магнитных полей возникает вращающий момент. Именно этим принципом руководствуются при регулировании скорости вращения асинхронного двигателя с помощью частотного преобразователя.
Электродвигатель по факту может считаться двухфазным, но у него только одна рабочая обмотка статора, вторая, расположенная относительно главной под углом в 90 о является пусковой.
Пусковая обмотка занимает в конструкции статора 1/3 пазов, на главную обмотку приходится 23 паза статора.
Ротор однофазного двигателя коротко замкнутый, помещенный в неподвижное магнитное поле статора, начинает вращаться.
Рис.№1 Схематический рисунок двигателя, демонстрирующий принцип работы однофазного асинхронного двигателя.
Основные виды однофазных электроприводов
Кондиционеры воздуха, холодильные компрессоры, электрические вентиляторы, обдувочные агрегаты, водяные, дренажные и фекальные насосы, моечные машины используют в своей конструкции асинхронный трехфазный двигатель.
Все типы частотников преобразуют переменное сетевое напряжение в постоянное напряжение. Служат для формирования однофазного напряжения с регулируемой частотой и заданной амплитудой для управления вращения асинхронных двигателей.
Управление скоростью вращения однофазных двигателей
Существует несколько способов регулирования скорости вращения однофазного двигателя.
- Управление скольжением двигателя или изменением напряжения. Способ актуален для агрегатов с вентиляторной нагрузкой, для него рекомендуется использовать двигатели с повышенной мощностью. Недостаток способа – нагрев обмоток двигателя.
- Ступенчатое регулирование скорости вращения двигателя с помощью автотрансформатора.
Рис.№2. Схема регулировки с помощью автотрансформатора.
Достоинства схемы – напряжение выхода имеет чистую синусоиду. Способность трансформатора к перегрузкам имеет большой запас по мощности.
Недостатки – автотрансформатор имеет большие габаритные размеры.
Использование тиристорного регулятора оборотов двигателя. Применяются тиристорные ключи, подключенные встречно-параллельно.
Рис. №3.Схема тиристорного регулирования однофазного асинхронного электродвигателя.
При использовании для регулирования скорости вращения однофазных асинхронных двигателей, чтобы избежать негативного влияния индукционной нагрузки производят модификацию схемы. Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
Транзисторный регулятор напряжения
В схеме используется широтно-импульсная модуляция (ШИМ) с применением выходного каскада, построенного на использовании полевых или биполярных IGBT транзисторах.
Рис. №4. Схема использования ШИМ для регулирования однофазного асинхронного электродвигателя.
Частотное регулирование асинхронного однофазного электродвигателя считается основным способом регулирования частоты электродвигателя, мощности, эффективности использования, скорости и показателей энергосбережения.
Рис. №5. Схема управления электродвигателем без исключения из конструкции конденсатора.
Частотный преобразователь: виды, принцип действия, схемы подключения
Частотный преобразователь разрешает своему владельцу снизить энергопотребление и автоматизировать процессы в управлении оборудованием и производством.
Основные компоненты частотного преобразователя: выпрямитель, конденсатор, IGBT-транзисторы, собранные в выходной каскад.
Благодаря способности управлением параметрами выходной частоты и напряжения достигается хороший энергосберегающий эффект. Энергосбережение выражается в следующем:
- В двигателе поддерживается неизменный текущий момент ращения вала. Это обусловлено взаимодействием выходной частоты инверторного преобразователя с частотой вращения двигателя и соответственно, зависимостью напряжения и крутящего момента на валу двигателя. Значит, что преобразователь дает возможность автоматически регулировать напряжение на выходе при обнаружении превышающего норму значения напряжения с определенной рабочей частотой нужно для поддержания требуемого момента. Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
- Частотный преобразователь служит для регулировки действия насосных агрегатов (см. страницу). При получении сигнала, поступающего с датчика давления, частотник снижает производительность насосной установки. При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
Уменьшая частоту до 40Гц, уменьшается величина напряжения до 250В, означает, что уменьшается количество оборотов вращения насоса и потребление энергии снижается в 2,56 раз.
Рис. №6. Использование частотного преобразователя Speedrive для регулирования насосных агрегатов по систем CKEA MULTI 35.
Для повышения энергетической эффективности использования частотного преобразователя в управлении электродвигателем необходимо сделать следующее:
- Частотный преобразователь должен соответствовать параметрам электродвигателя.
- Частотник подбирается в соответствии с типом рабочего оборудования, для которого он предназначен. Так, частотник для насосов функционирует в соответствии с заложенными в программу параметрами для управления работой насоса.
- Точные настройки параметров управления в ручном и автоматическом режиме.
- Частотный преобразователь разрешает использовать режим энергосбережения.
- Режим векторного регулирования позволяет произвести автоматическую настройку управления двигателем.
Преобразователь частоты однофазный
Компактное устройство преобразования частоты служит для управления однофазными электродвигателями для оборудования бытового предназначения. Большинство частотных преобразователей обладает следующими конструктивными возможностями:
- Большинство моделей использует в своей конструкции новейшие технологии векторного управления.
- Они обеспечивают улучшенный вращающий момент однофазного двигателя.
- Энергосбережение введено в автоматический режим.
- Некоторые модели частотных преобразователей используют съемный пульт управления.
- Встроенный PLC контроллер (он незаменим для создания устройств сбора и передачи данных, для создания систем телеметрии, объединяет устройства с различными протоколами и интерфейсами связи в общую сеть).
- Встроенный ПИД регулятор (контролирует и регулирует температуру, давление и технологические процессы).
- Напряжение выхода регулируется в автоматическом режиме.
Рис.№7. Современный преобразователь Optidrive с основными функциональными особенностями.
Важно: Однофазный преобразователь частоты, питаясь от однофазной сети напряжением 220В, выдает три линейных напряжения, величина каждого из них по 220В. То есть, линейное напряжение между 2 фазами находится в прямой зависимости от величины выходного напряжения самого частотника.
Частотный преобразователь не служит для двойного преобразования напряжения, благодаря наличию в конструкции ШИМ-регулятора, он может поднять величину напряжения не более чем на 10%.
Главная задача однофазного преобразователя частоты – обеспечить питание как одно- так и трехфазного электродвигателя. В этом случае ток двигателя будет соответствовать параметрам подключения от трехфазной сети, и оставаться постоянным
Частотное регулирование однофазных асинхронных электродвигателей
Первое на что обращаем внимание при выборе частотника для своего оборудования – это соответствие сетевого напряжения и номинального значения тока нагрузки, на который рассчитан двигатель. Способ подключения выбирается относительно рабочего тока.
Главным в схеме подключения является наличие фазосдвигающего конденсатора, он служит для сдвига напряжения, поступающего на пусковую обмотку. Она служит для пускового включения двигателя, иногда после того, как двигатель заработал, пусковая обмотка вместе с конденсатором отключается, иногда остается включенной.
Схема подключения однофазного двигателя с помощью однофазного частотного преобразователя без использования конденсатора
Выходное линейное напряжение устройства на каждой фазе равно выходному напряжению частотника, то есть на выходе будет три напряжения линии, каждое по 220В. Для запуска может использоваться только пусковая обмотка.
Рис. №8. Схема присоединения однофазного асинхронного двигателя через конденсатор
Фазосдвигающий конденсатор не может обеспечить равномерный фазовый сдвиг в пределах границ частот инвертора. Частотник обеспечит равномерный сдвиг фаз. Для того, чтобы исключить из схемы конденсатор, нужно:
- Конденсатор стартера С1 удаляется.
- Вывод обмотки двигателя присоединяем к точке выхода напряжения частотника (используется прямая проводка).
- Точка А присоединяется к СА; В соединяется с СВ; W соединяется к СС, таким образом электродвигатель присоединится напрямую.
- Для включения в обратном направлении (обратная проводка) необходимо В присоединить к СА; А присоединить к СВ; W соединить с СС.
Рис. №9. Схема подключения однофазного асинхронного двигателя без использования конденсатора.
На видео — Частотный преобразователь. Подключение трехфазного двигателя в однофазную сеть 220В.
Преобразователь частоты для управления скоростью трехфазного двигателя
Трехфазный асинхронный двигатель, вероятно, является наиболее важным первичным двигателем.
для промышленного применения с интегральной мощностью. Для одного и того же веса рейтинг
однофазного асинхронного двигателя составляет всего около 60 процентов от многофазного.
машина. У однофазных двигателей КПД и коэффициент мощности ниже.
Однако трехфазный асинхронный двигатель часто раздражал применение.
инженер из-за его сопротивления контролю скорости. Некоторое увеличение скорости
управление обеспечивается роторными типами, но дальность неконкурентна
с тем, что доступно для двигателей постоянного тока. «Если бы мы только могли варьировать применяемую частоту»,
было замечание, часто сделанное в эпоху до твердого состояния. Конечно, в некоторых реализациях
частота была изменена за счет использования другого комплекта двигателя / генератора переменного тока.
Такая стратегия явно неэкономична.
Конструкция регулируемой частоты трехфазного питания не сложная
если компромисс достигнут в отношении формы волны. Хотя прямоугольная волна
приведет к большим потерям на вихревые токи и гистерезису, но все же не
необходимо для синтеза истинной синусоиды. Ступенчатая форма волны, состоящая
из шести сегментов можно создать путем смешивания логических импульсов. Такая форма волны
будет иметь относительно низкую энергию третьей гармоники — главного виновника вихревых волн.
рассеивание тока и гистерезиса. Использование цифровой логики обеспечивает
значительное упрощение, поскольку модули ИС заменяют сложные дискретные
цепи на всех трех фазах.
Другим аспектом частотно-регулируемого управления является необходимость изменения
напряжение двигателя на тот же процент, что и изменение частоты. В
небольшие двигатели, это основное требование можно обойти, вставив
сопротивления в каждом выводе двигателя. Однако такой техники не будет.
допускается с большими двигателями, если изменение скорости не ограничено.
Использование такого сопротивления также ухудшает регулировку скорости.
мотор.
РИС. 7 представлена блок-схема преобразователя частоты для скорости
управление трехфазным асинхронным двигателем мощностью 10 л.с. Шесть каналов питания обеспечивают
требуемая последовательность шагов напряжения, необходимая для развития квазисинусоиды
волна. Эта последовательность повторяется с интервалом 120°, чтобы обеспечить
трехфазная энергия к двигателю.
РИС. 7 Блок-схема преобразователя частоты для регулирования скорости
трехфазных двигателей. Это от Delco Electronics.
РИС. 8 Логическая временная последовательность для преобразователя частоты. Делко
Электроника.
Трехфазный волновой синтез, передаваемый цифро-логическими модулями
начинается с последовательности импульсов CL. Последующие модификации, сделанные
к этим импульсам, вместе с различными методами комбинирования, проиллюстрированы
в логической временной последовательности, показанной на фиг. 8. Обратите внимание, что базовый трехфазный
волна уже выходит по отношению к волнам A, B и C. Точки контура
из которых эти волны получены в логике КМОП, обозначены в
ИНЖИР. 9. Триггеры FF102, FF103 и FF104 подключены как трехразрядный
регистр сдвига. Обратите внимание, что регистр сдвига обеспечивает дополнительные волны
А’, Б’ и С’, а также. Эти дополнительные волны используются в построении
блочный процесс для изменения исходных трехфазных волн ABC. Один желаемый
модификация представляет собой уменьшение полуволновой скважности до 165° с
обычные 180°. Как упоминалось ранее, это предотвращает одновременное
проведение силовых выходных каскадов, которые чередуют их проведение
состояния. Другая желаемая модификация — это очень грубое моделирование
синусоида. Здесь также используются волны CL и CL. (Хотя ступенчатый
волны ‘i’ BB, и я в конечном итоге доставил двигатель никогда не мог на самом деле
быть ошибочно приняты за синусоиду, они почти так же пригодны для работы
двигателя как истинная синусоида. Отличительной чертой их является легкость
с помощью которых они производятся iii логические схемы и их разумно
низкое содержание третьей гармоники.
РИС. 9 Генератор, управляемый напряжением, и трехфазная логическая схема. По
Делко. На этикетках указано: 12-вольтовый регулируемый блок питания; осциллятор; Волна
формирователь; 3-фи Логика.
Элементы НЕ-И, G101 и G102, запрещают работу в запрещенном состоянии
сдвиговый регистр. Триггер FF101 вдвое уменьшает частоту импульсов, получаемых от
формирователь волны, тем самым создавая волну CL, которая синхронизирует модули в
сдвиговый регистр. Наконец, дополнительный тактовый сигнал генерируется
ворота G103. Этот тактовый сигнал CL не используется при генерации
основные трехфазные волны. Скорее, он используется для тактовых триггеров FF411,
FF421, FF431, FF451 и FF461, показанные на принципиальной схеме.
на фиг. 10. Эти триггеры составляют 3 логическую задержку, показанную на
блок-схема фиг. 7. Эта логическая операция обеспечивает нулевое напряжение
шаг к каждой волне m трехфазной последовательности.
Основная частота, генерируемая управляемым напряжением генератором, равна
в 24 раза выше, чем в конечном итоге поставлено на мотор. Это
полезная техника логического синтеза. Можно построить низкочастотную волну
из более высокочастотных «строительных блоков». Хотя наводит на мысль о Фурье
синтеза, метод проще — манипулируют прямоугольными импульсами и
комбинируются для получения нужной формы сигнала. Осуществляется синтез импульсов.
в функциональном блоке 3-phi Logic на фиг. 7.
Важный аспект формы волны, создаваемой логической схемой.
– ступень нулевого напряжения. В результате этого шага продолжительность
полупериодов, применяемых к двигателю, составляет 165°, а не обычные 180°.
Это предотвращает перекрытие проводимости между выходными каскадами мощности, которые
выключение и те что включаются. Функциональный блок, который производит
этот шаг при нулевом напряжении представляет собой логическую задержку 3 фи на фиг. 7. Фотоэлементы
обеспечить электрическую изоляцию между трехфазной логической схемой
и цепи моторного привода.
Схематическая диаграмма на фиг. 9 показан генератор, управляемый напряжением.
и основная трехфазная логика инвертора. Обратите внимание, что только зарядка
схема для Q102, однопереходного транзистора, соединяется с внешним
Источник переменного напряжения 0-300 вольт. Это позволяет регулировать зарядку.
скорость конденсатора С 104 и, следовательно, скорость пульсации эмиттер-база
явление пробоя Q102. В результате генерируемая частота
и напряжение, подаваемое на двигатель, увеличивается и уменьшается вместе. Почти постоянная
частота, создаваемая большинством однопереходных генераторов, обусловлена тем, что
что эмиттерная и базовая цепи подключены к одному и тому же источнику питания.
В этой схеме межбазовое напряжение фиксируется на уровне 12 вольт внутренним
регулируемый блок питания.
За однопереходным генератором, управляемым напряжением, следует управляемый
мультивибратор на транзисторах Q103 и Q104. Этот этап обрабатывает
сигнал осциллятора до подходящего уровня и формы для срабатывания
3-х логические модули. Выход Q104 состоит из периодической волны
последовательность прямоугольных импульсов CL Эти импульсы имеют половину частоты
из тех, которые первоначально порождены стадией одноперехода.
На рис. 10 представлена принципиальная схема трехфазного инвертора. Этот
схема подает питание на двигатель, когда он управляется генерируемыми сигналами
в трехфазной логической схеме, описанной ранее. Включено в эту схему
являются логикой задержки для придания шагу нулевого напряжения в двигателе
сигналов и оптопары, обеспечивающие гальваническую развязку
между низкоуровневыми логическими сигналами и силовыми цепями.
Схема на фиг. 10 проще, чем кажется при первоначальном осмотре.
В схемах много повторений. Не только
все цепи для каждой из трех фаз идентичны, но каждая из
шесть каналов мощности содержат пять выходных усилителей Дарлингтона, подключенных
в параллели. Усилители Darlington типа DTS с тройным рассеивателем.
кремниевые агрегаты. У них всего три клеммы, что еще больше упрощает
соединений, а также уменьшить количество компонентов. Использование слова «снаббер
сети», на примере R512 и C511, заслуживает внимания. Эти
Сети RC вносят больше, чем просто «устранение пиков» сигналов. Фактически,
они удерживают динамическое отклонение Дарлингтонского напряжения и тока в пределах
безопасная рабочая зона, предписанная производителем. Такая грузовая марка
«формирование» приносит достойные дивиденды в плане надежности и эффективности.
РИС. 10 Принципиальная схема преобразователя частоты для скорости
управление трехфазными двигателями. от Делко Электроникс.
Внешний источник питания постоянного тока должен иметь допустимый ток около
60 ампер и должен допускать изменение выходного напряжения от 0 до
300 вольт. Таким требованиям лучше всего удовлетворяет коммутационная система с регулируемым напряжением.
питания, что сводит к минимуму рассеиваемую мощность. Альтернатива — простой
двухполупериодный блок питания с автотрансформаторным управлением в сети.
Для питания постоянным током можно использовать однофазную линию электропередачи, а трехфазную,
Мощность 60 Гц, вероятно, была бы более практичной. Когда подача постоянного тока регулируется
на 250 вольт двигатель получает трехфазное питание частотой 60 Гц. С 20
вольт от источника постоянного тока, трехфазное питание, подаваемое на двигатель
имеет частоту 5 Гц. Диапазон скоростей, соответствующий такому напряжению
снижение примерно с 1750 об/мин до 145 об/мин.
Проектирование и разработка недорогого инверторного привода для асинхронных двигателей — Penn State
Недорогие инверторы и соответствующие им контроллеры были разработаны для приводов асинхронных двигателей с регулируемой скоростью в одну лошадиную силу. Вопросы, решаемые для достижения низкой стоимости и простоты эксплуатации, включают: технические характеристики, конструкцию схемы управления и размещение на печатных платах, схему силовой цепи, коммутационные и проводимые потери, настройку, разработку компактного устройства охлаждения, простоту изготовления и компоновки.
| Original language | English (US) |
|---|---|
| Pages | 771-777 |
| Number of pages | 7 |
| State | Published — Jan 1 1996 |
| Событие | Материалы 11-й ежегодной конференции и выставки IEEE по прикладной силовой электронике 1996 года, APEC’96. Часть 1 (из 2) — Сан-Хосе, Калифорния, США Продолжительность: 3 марта 1996 г. → 7 марта 1996 г. |
| Другое | Материалы 11-й ежегодной конференции и выставки IEEE по прикладной силовой электронике 1996 года, APEC’96. Part 1 (of 2) |
|---|---|
| City | San Jose, CA, USA |
| Period | 3/3/96 → 3/7/96 |
- Electrical and Electronic Engineering
- АПА
- Автор
- БИБТЕКС
- Гарвард
- Стандарт
- РИС
- Ванкувер
Диамантидис Д. , Кришнан Р. и Ли С. (1996). Проектирование и разработка недорогого инверторного привода для асинхронных двигателей . 771-777. Документ, представленный на 11-й ежегодной конференции и выставке IEEE по прикладной силовой электронике 1996 г., APEC’96. Часть 1 (из 2), Сан-Хосе, Калифорния, США.
Диамантидис, Д. ; Кришнан, Р. ; Ли, Шиён. / Проектирование и разработка недорогого инверторного привода для асинхронных двигателей . Документ, представленный на 11-й ежегодной конференции и выставке IEEE по прикладной силовой электронике 1996 г., APEC’96. Часть 1 (из 2), Сан-Хосе, Калифорния, США.7 стр.
@конференция{f45187d485274fc58c20d9f2fc3d4718,
title = «Проектирование и разработка недорогого инверторного привода для асинхронных двигателей»,
abstract = «Недорогие инверторы и соответствующие им контроллеры были разработаны для приводов асинхронных двигателей с регулируемой скоростью в одну лошадиную силу. стоимость и простота эксплуатации: технические характеристики, конструкция цепей управления и разводка на печатных платах, разводка силовых цепей, коммутационные и кондуктивные потери, настройка, разработка компактной системы охлаждения, простота изготовления и компоновки. »,
автор = «Д. Диамантидис, Р. Кришнан и Шиён Ли»,
год = «1996»,
месяц = январь,
день = «1»,
язык = «Английский (США)»,
pages = «771—777»,
note = «Proceedings of the 11th Annual Applied Power Electronics Conference and Exposition IEEE 1996 г., APEC’96. Часть 1 (из 2); Дата конференции: 03-03-1996 Через 03-07-1996»,
}
Диамантидис, Д., Кришнан, Р. и Ли, С. 1996, «Проектирование и разработка недорогого инверторного привода для асинхронных двигателей», доклад, представленный на 11-й ежегодной конференции и выставке IEEE по прикладной силовой электронике 1996 года, APEC’96. Часть 1 (из 2), Сан-Хосе, Калифорния, США, 03.03.96 — 07.03.96, стр. 771-777.
Проектирование и разработка недорогого инверторного привода для асинхронных двигателей. / Диамантидис, Д.; Кришнан Р.; Ли, Шиён.
1996. 771-777 Доклад, представленный на Proceedings of the 1996 IEEE Annual Applied Power Electronics Conference and Exposition, APEC’96. Часть 1 (из 2), Сан-Хосе, Калифорния, США.
Результаты исследования: Вклад в конференцию › Статья › рецензирование
TY – CONF
T1 – Проектирование и разработка недорогого инверторного привода для асинхронных двигателей
AU – Diamantidis, D.
AU – Krishnan, R
AU — Lee, Shiyoung
PY — 1/1/1996
Y1 — 1/1/1996
N2 — Бюджетные инверторы и соответствующие им контроллеры были разработаны для приводов асинхронных двигателей с регулируемой скоростью в одну лошадиную силу. Вопросы, решаемые для достижения низкой стоимости и простоты эксплуатации, включают: технические характеристики, конструкцию схемы управления и размещение на печатных платах, схему силовой цепи, коммутационные и проводимые потери, настройку, разработку компактного устройства охлаждения, простоту изготовления и компоновки.
AB — Недорогие инверторы и сопутствующие им контроллеры были разработаны для приводов асинхронных двигателей с регулируемой скоростью мощностью в одну лошадиную силу. Вопросы, решаемые для достижения низкой стоимости и простоты эксплуатации, включают: технические характеристики, конструкцию схемы управления и размещение на печатных платах, схему силовой цепи, коммутационные и проводимые потери, настройку, разработку компактного устройства охлаждения, простоту изготовления и компоновки.
UR — http://www.scopus.com/inward/record.url?scp=0029778018&partnerID=8YFLogxK
UR — http://www.scopus.com/inward/citedby.url?scp=0029778018&partnerID=8YFLogxK
M3 — Paper
AN — SCOPUS:0029778018
SP — 771
EP — 777
T2 — Материалы 11-й ежегодной конференции и выставки IEEE по прикладной силовой электронике 1996 г., APEC’96. Часть 1 (из 2)
Y2 — с 3 марта 1996 г. по 7 марта 1996 г.
ER —
Диамантидис Д., Кришнан Р., Ли С. Проектирование и разработка недорогого инверторного привода для асинхронных двигателей. 1996. Документ, представленный на Proceedings of the 1996 IEEE Annual Applied Power Electronics Conference and Exposition, APEC’96. Часть 1 (из 2), Сан-Хосе, Калифорния, США.
Реализовать шестиступенчатый инвертор с питанием от асинхронного двигателя
Реализовать шестиступенчатый инвертор с питанием от асинхронного двигателя
Описание
Шестиступенчатый блок VSI Induction Motor Drive представляет классический
регулирование Вольт/Герц без обратной связи, шестиступенчатый или квазипрямоугольный привод для асинхронных двигателей.
Блок получает частоту питания статора от задания скорости (пренебрегая скольжением).
частота). Эта частота используется для вычисления положения потока статора, необходимого для генерации
шестиступенчатые импульсы для трехфазного инвертора. Блок получает ссылочное напряжение на шине постоянного тока или
входное напряжение статора, основанное на управлении Вольт/Гц или стратегии постоянного магнитного потока статора.
Основное преимущество данного привода по сравнению с другими скалярно-управляемыми и векторно-управляемыми
дисков заключается в простоте его реализации. Однако, как и в большинстве приводов со скалярным управлением,
динамическая реакция этого привода медленная из-за присущего эффекта связи между крутящим моментом
и флюс, который присутствует в машине. Кроме того, этот диск имеет тенденцию быть более нестабильным для
изменение скорости двигателя по сравнению с приводами с регулируемой скоростью.
Блок Six-Step VSI Induction Motor Drive использует эти блоки из
Библиотека электрических приводов / основных приводных блоков:
Шестиэтапный генератор
Контроллер напряжения (шина постоянного тока)
Блок стрельбы моста (AC)
Inverter (Три-фаза)
110
111111111111111111111111111111111111111111111111111111.. БУЛОВОЙ ЛЮБОЙ
Примечания
В моторном приводе AC1 скорость мотора не регулируется по замкнутому контуру. Вместо этого скорость
заданное значение используется только для определения напряжения и частоты двигателя, применяемых шестиступенчатой
инвертор, чтобы поддерживать соотношение (V/F) (или поток двигателя) постоянным от 0 до номинального
скорость. При скорости выше номинальной двигатель работает в режиме ослабления потока; то есть напряжение
поддерживается постоянной на своем номинальном значении, в то время как частота увеличивается пропорционально
заданное значение скорости.
При реверсивной скорости требуется короткая задержка при пересечении нулевой скорости, чтобы воздушный зазор
поток падает до нуля.
Параметры
Общие
- Режим выходной шины
Выберите способ организации выходных переменных. Если вы выберете
Несколько(по умолчанию), блок имеет три отдельные выходные шины для двигателя,
выходные шины
преобразователь и переменные контроллера. Если вы выберетеОдиночный выход, все переменные выводятся на одну шину.
автобус- Механический вход
Выберите между крутящим моментом нагрузки, скоростью двигателя и механическим портом вращения, как
механический ввод. Значение по умолчанию: Крутящий момент Tm.Если выбрать и применить крутящий момент нагрузки, на выходе будет скорость двигателя в соответствии с
Следующее дифференциальное уравнение, описывающее динамику механической системы:Te=Jddtωr+Fωr+Tm
Эта механическая система включена в модель двигателя.
Если вы выберете скорость двигателя в качестве механического входа, вы получите электромагнитную
крутящий момент в качестве выходного сигнала, что позволяет внешне представить динамику механической системы.
внутренняя механическая система не используется с этим выбором механического входа и инерцией
параметры вязкого трения не отображаются.Для механического поворотного порта соединительный порт S считается механическим
ввод и вывод. Это позволяет прямое подключение к среде Simscape. Механическая система двигателя также включена в привод.
и основан на том же дифференциальном уравнении.- Использовать имена сигналов как метки
При установке этого флажка
иCtrl Измерительные выходыиспользуют имена сигналов для идентификации шины
этикетки. Выберите эту опцию для приложений, требующих, чтобы метки сигналов шины имели только
буквенно-цифровые символы.Если этот флажок снят (по умолчанию), для вывода измерения используется сигнал
определение для идентификации меток шины. Метки содержат не буквенно-цифровые символы,
несовместимы с некоторыми Simulink ® приложений.
Вкладка «Асинхронная машина»
На вкладке «Асинхронная машина» отображаются параметры
Блок асинхронной машины библиотеки Fundamental Blocks (powerlib).
Вкладка «Преобразователи и шина постоянного тока»
На вкладке « Преобразователи и шина постоянного тока » отображаются параметры
Тиристорный преобразователь, шина постоянного тока и инвертор
(Трехфазные) блоки библиотеки Electric Drives / Fundamental Drive Blocks.
Вкладка «Контроллер»
- Схема
При нажатии этой кнопки отображается схема, иллюстрирующая контроллеры скорости и тока.
появляются схемы.
На вкладке Controller отображаются параметры напряжения.
Блоки контроллера (шина постоянного тока) и шестиступенчатого генератора электрической
Библиотека приводов / фундаментальных блоков приводов.
Блокировка входов и выходов
-
SP Уставка скорости или крутящего момента. Уставка скорости может быть ступенчатой функцией, но скорость
Скорость изменения будет следовать линейному ускорению/замедлению. Если момент нагрузки и
имеют противоположные знаки, ускоряющий момент будет суммой электромагнитного и
моменты нагрузки.-
TmилиWm Механический ввод: момент нагрузки (Tm) или скорость двигателя (Wm). Для механических
ротационный порт (S), этот ввод удаляется.-
A, B, C Трехфазные клеммы моторного привода.
-
Wm,TeилиS Механический выход: скорость двигателя (Wm), электромагнитный момент (Te) или механический
ротационный порт (S).
Когда для параметра Режим выходной шины установлено значение , блок имеет следующие три выходные шины:
-
Двигатель Вектор измерения двигателя. Этот вектор позволяет вам наблюдать переменные двигателя
используя блок Bus Selector.-
Conv Вектор измерения трехфазных преобразователей. Этот вектор содержит:
Выходное напряжение выпрямителя
Выходное напряжение инвертора
Входной ток выпрямителя
Выходные выходные текущие
. Блок мультиметра.
-
Ctrl Вектор измерения контроллера. Этот вектор содержит:
Угол открытия, вычисленный контроллером тока
Ошибка скорости (разница между линейным изменением задания скорости и фактической скоростью)
Изменение заданного значения скорости
- 7 Когда режим шины 1 5 6 параметр установлен на , блок группирует выходы Motor, Conv и Ctrl в одну шину
выход.Технические характеристики модели
Библиотека содержит наборы параметров привода мощностью 3 л.с. и 500 л.с. Технические характеристики
эти два диска показаны в следующей таблице.3 HP and 500 HP Drive Specifications
3 HP Drive
500 HP Drive
Drive Input Voltage
Amplitude
220 V
2300 V
Frequency
60 Hz
60 Hz
Motor Nominal
ЗначенияPower
3 HP
500 HP
500 л.
с.0057Speed
1705 rpm
1773 rpm
Voltage
220 V
2300 V
Examples
The
ac1_exampleПример иллюстрирует типичную работу
Моторный привод AC1.Ссылки
[1] Bose, B.K. Modern Power Electronics and AC
Диски . Река Аппер-Сэдл, Нью-Джерси: Prentice-Hall, 2002.[2] Харунур, М. Р. Силовая электроника . Верхний
Saddle River, NJ: Prentice-Hall, 1988.История версий
Представлено в R2006a
Вы щелкнули ссылку, соответствующую этой команде MATLAB:
Запустите команду, введя ее в Окно команд MATLAB.
Веб-браузеры не поддерживают команды MATLAB.Привод асинхронного двигателя с инверторным питанием от источника тока
Привод асинхронного двигателя с питанием от инвертора с источником тока.
В асинхронном двигателе с питанием от инвертора напряжение, приложенное к статору, пропорционально частоте, с поправкой на падение сопротивления статора, особенно при низкие скорости, чтобы поддерживать постоянный поток. Хорошо известно, что ток, потребляемый асинхронным двигателем, не зависит от частоты статора, когда поток в воздушном зазоре постоянен. Существует фиксированная зависимость между частотой скольжения и током статора для номинального потока в воздушном зазоре, как показано на рис. 4.25. Управляя скольжением двигателя, можно контролировать ток статора. Таким образом, возможно косвенное управление потоком. Управление проще, чем управление напряжением. Кривая между частотой скольжения и током статора может быть рассчитана с использованием эквивалентной схемы. Инвертор PWM может управляться для обеспечения желаемых токов в двигателе.В преобразователе звена постоянного тока, если ток звена постоянного тока регулируется, инвертор называется инвертором с источником тока.
Ток в звене постоянного тока поддерживается постоянным за счет высокой индуктивности, а емкость фильтра отсутствует. Переменное напряжение звена постоянного тока преобразуется в асинхронный двигатель с питанием от инвертора с помощью индуктивности. Источник постоянного тока имеет высокое сопротивление. Поскольку ток в звене поддерживается постоянным, форма волны выходного тока определяется работой инвертора, а выходное напряжение определяется характером импеданса нагрузки. Асинхронный двигатель с инверторным питанием от источника тока подходит для нагрузок с низким импедансом гармонических токов и коэффициентом мощности, равным единице.Асинхронный двигатель с инверторным питанием от источника тока имеет очень простую конфигурацию. Никаких диодов обратной связи не требуется. Выпрямитель с фазовым управлением используется на стороне линии для обеспечения контроля тока. Поскольку звено постоянного тока содержит только индуктивность, регенерация возможна путем изменения полярности напряжений и сохранения направления тока.
Следовательно, четырехквадрантный привод прост и понятен. Он обеспечивает эффективную буферизацию выходного сигнала инвертора от колебаний напряжения питания. Прямое управление током статора позволяет относительно легко реализовать точное управление по замкнутому контуру.Коммутация инвертора зависит от нагрузки. Параметры нагрузки составляют часть схемы коммутации. Поэтому требуется согласование между инвертором и двигателем. Многомоторная работа невозможна. Инвертор обязательно должен быть принудительно коммутируемым, так как асинхронный двигатель не может обеспечить реактивную мощность для инвертора.
Постоянный ток звена постоянного тока может протекать через фазы двигателя под управлением инвертора, поэтому ток двигателя имеет квазипрямоугольную форму. Напряжение двигателя почти синусоидальное с наложенными пиками из-за коммутации. Эти скачки напряжения определяют номинальное напряжение резисторов, а также влияют на изоляцию двигателя. Эти всплески можно ограничить, если машина имеет малое реактивное сопротивление рассеяния или большие коммутирующие конденсаторы.
Машина с меньшим реактивным сопротивлением рассеяния подходит для работы асинхронного двигателя с питанием от источника тока с инвертором, чтобы свести к минимуму скачки напряжения и гармонические потери. Влияние пульсаций крутящего момента уменьшается, и частота работы может быть увеличена. Коммутирующая емкость выбрана таким образом, чтобы найти компромисс между скачками напряжения и максимальной рабочей частотой. Коммутация требует определенного минимального тока. Инвертор имеет возможность восстановления после сбоя коммутации. Индуктивность звена вызывает медленное нарастание тока повреждения, и к тому времени, когда он достигает высоких значений, повреждение может быть устранено.Привод создает проблемы со стабильностью при малых нагрузках. Работа в открытом цикле невозможна. У него очень широкий диапазон регулирования скорости, но динамические характеристики плохие.
Приводному двигателю требуется снижение номинальных характеристик из-за потерь на гармониках и связанного с этим нагрева. Присутствуют пульсации крутящего момента, и их амплитуда велика при низкой частоте работы из-за дополнительных гармоник в потоке ротора. Коэффициент мощности линии низкий из-за фазового контроля.До номинальной частоты привод находится в режиме постоянного крутящего момента, а выше номинальной частоты привод находится в режиме постоянной мощности.
Ток статора асинхронного двигателя, работающего на переменной частоте, переменное напряжение питания не зависит от частоты статора, если поток в воздушном зазоре поддерживается постоянным. Однако это функция частоты ротора. Развиваемый крутящий момент также зависит только от частоты ротора. Используя эти особенности, можно разработать привод с регулируемым скольжением (рис. 4.28), использующий инвертор источника тока для питания асинхронного двигателя. В управление введена зависимость между частотой ротора и током статора для номинального потока в воздушном зазоре. Таким образом, возможен косвенный контроль потока. Выход функционального генератора дает опорное значение тока.
Измеренный ток сравнивается с эталонным значением, и ошибка используется для изменения угла включения фазоуправляемого преобразователя на стороне сети. Вход в генератор функций представляет собой разницу между опорной скоростью и фактической скоростью, и ее можно рассматривать как частоту скольжения, которая добавляется к частоте, соответствующей скорости ротора. Это дает значение частоты статора, и инвертор на стороне машины управляется для получения эта частота. Управление действует до тех пор, пока ротор не достигнет требуемой скорости с требуемой частотой скольжения.Привод с регулируемым проскальзыванием имеет следующие преимущества:
1. Привод с регулируемым проскальзыванием отличается высокой эффективностью.
2.Возможна точная регулировка крутящего момента в широком диапазоне скоростей.
3. Частота скольжения может быть любой, вплоть до значения, соответствующего крутящему моменту.
Операция проходит при очень хорошем коэффициенте мощности. Работа очень стабильная. 4. Ротор можно разгонять при постоянном крутящем моменте и токе, поддерживая частоту ротора на соответствующем уровне. Быстрое ускорение.
5. Поскольку это приводит к плавному пуску, двигатель не видит заблокированных токов ротора и связанных с этим скачков напряжения.
6. Специальные роторы с высоким пусковым моментом не требуются. Можно использовать роторы с низким сопротивлением, чтобы ограничить потери.
7. Может быть встроен рекуперативное торможение. Возможно торможение с постоянным крутящим моментом.
8. Привод имеет КПД, сравнимый с тиристорным приводом постоянного тока.
Дополнительные преимущества асинхронных двигателей с короткозамкнутым ротором, такие как высокое отношение мощности к весу, меньшее техническое обслуживание, низкая инерция, отсутствие ограничений по диапазонам мощности и диапазонам скорости, делают привод с регулируемым проскальзыванием реальным конкурентом приводам постоянного тока.
Отдельные методы устранения гармоник или принципы ШИМ могут использоваться для уменьшения влияния пульсаций крутящего момента, особенно на низких скоростях. В этих методах управление может быть достигнуто за счет управления током в звене постоянного тока, а затем принцип ШИМ может использоваться исключительно для управления гармоническим составом формы волны тока. Такое разделение функций контроля тока и гармоник позволяет выбрать стратегию управления ШИМ, направленную исключительно на улучшение пульсаций крутящего момента двигателя и снижение потерь на гармоники.
Большинство стратегий ШИМ для асинхронных двигателей с питанием от инвертора тока основаны на выбранных методах подавления гармоник. Они используются для устранения гармоник низшего порядка из тока статора, и методы приводят к устранению пульсаций крутящего момента низшего порядка (рис. 4.29).
В последние годы были специально разработаны стратегии ШИМ для минимизации пульсаций скорости вращения ротора из-за пульсаций крутящего момента, чтобы привод имел плавное вращение на низких скоростях (рис.
4.30).Общие характеристики асинхронного двигателя с питанием от инвертора можно резюмировать следующим образом:
1. Коммутация в зависимости от нагрузки: поскольку параметры нагрузки являются частью коммутационной цепи, инвертор и двигатель должны быть согласованы.
2. Инвертор имеет простую конфигурацию. ФВД отсутствуют.
3. Работа только с одним двигателем
4. Промежуточный контур содержит только индуктивность. Для поддержания постоянного тока он должен быть очень большим. Работа в двух квадрантах проста
5. Обязательно требуется выпрямитель с фазовым управлением на стороне сети. Переменное напряжение звена постоянного тока преобразуется в источник постоянного тока с помощью высокой индуктивности звена.
6. Инвертор принудительно коммутируется, чтобы обеспечить ток переменной частоты для питания двигателя.
7. Значение емкости представляет собой компромисс между скачками напряжения и максимальной рабочей частотой. Чем больше емкость, тем меньше напряжение. Максимальная рабочая частота также ограничена.
8. Реактивное сопротивление рассеяния двигателя влияет на гармонические напряжения. Он также отвечает за скачки напряжения во время коммутации. Реактивное сопротивление рассеяния, являясь параметром коммутационной цепи, определяет время коммутации, и, следовательно, верхняя рабочая частота ограничена. Двигатель должен иметь меньшее реактивное сопротивление рассеяния, чтобы уменьшить гармонические напряжения и пики напряжения, а также увеличить диапазон регулирования скорости. Шипы влияют на номинал тиристора и влияют на изоляцию. Размер двигателя увеличивается, если реактивное сопротивление рассеяния мало.
9. Достаточно тиристоров преобразовательного класса. Использование тиристора хорошее
10.
Инвертор восстанавливается после сбоя коммутации. Индуктивность звена вызывает медленное нарастание тока короткого замыкания, и к тому времени, когда он достигает высокого значения, его можно подавить. 11. Проблема со стабильностью при малой нагрузке. Минимальный ток должен быть там для коммутации.
12. Работа без обратной связи невозможна. Динамический отклик вялый
13.Линия п.ф. плохой из-за фазового контроля.
14. Находит применение в качестве привода средней и высокой мощности
15. Пульсации крутящего момента вызывают колебания скорости на очень низких скоростях. Стратегии PWM используются для устранения колебаний скорости и обеспечения плавности хода.
16. Возможна работа как с постоянным крутящим моментом, так и с постоянной мощностью в лошадиных силах.
[PDF] Анализ гармоник тока в системе привода асинхронного двигателя с инверторным питанием в условиях отказа
- Идентификатор корпуса: 16810055
@inproceedings{Biswas2009CurrentHA, title={Анализ гармоник тока в системе привода асинхронного двигателя с инверторным питанием в условиях неисправности}, автор = {Бисваджит Бисвас и С. П. Дас и Притвирадж Пуркаит и М.С. Мандал},
год = {2009}
} - B. Biswas, S. Das, M. Mandal
- Опубликовано в 2009 г.
- Engineering
В этом документе представлен гармонический анализ сигнатур тока двигателя при различных условиях отказа систем частотно-регулируемого привода (VFD) средней и большой мощности. . Компьютерное моделирование асинхронного двигателя с питанием VSI на основе работы с постоянным напряжением/частотой (V/f) реализовано с использованием программного обеспечения для моделирования Powersim (PSIM). Частотные характеристики токов двигателя сравниваются для анализа условий неисправности в системе привода двигателя. шина постоянного тока. Шина постоянного тока содержит конденсаторы для приема питания от…
iaeng.org
Управление напряжением/частотой без обратной связи асинхронного двигателя на основе метода ШИМ
- Раджаб Ибсаим, инженер. Ashraf Shariha, Dr. Ali A Mehna
Engineering
- 2018
Быстрое развитие технологий силовых полупроводников, топологий преобразователей и методов управления с повышенной надежностью и снижением стоимости привело к производству асинхронных приводов переменного тока.
…Серьезность и влияние отказов на гармоники тока в приводах переменного тока с инверторным питанием
Электроприводы составляют огромную часть промышленного оборудования. Современные приводы имеют большую степень автоматизации и используют для управления устройства силовой электроники и цифровые технологии. Приводы асинхронных двигателей, питаемые…
Моделирование анализа трехфазного замыкания асинхронного двигателя на землю с использованием БПФ
- А. Кулкарни, М. Ф. Куреши, М. Джа
Инженерное дело
- 2014
имитационное моделирование системы привода асинхронного двигателя. Основной целью этой статьи является анализ трехфазных и линейных замыканий на землю асинхронного двигателя и гармонических…
Работа асинхронного двигателя с питанием от инвертора при разомкнутой цепи конденсатора звена постоянного тока
Влияние на ток статора, выход инвертора, скорость и крутящий момент двигателя особенно изучены в этой статье, что может увеличить усилия по повышению надежности асинхронного двигателя диски.
Гармонический анализ асинхронного двигателя с питанием от CSI
Представлены результаты моделирования гармонического анализа сигнатур тока двигателя при различных условиях неисправности асинхронного двигателя с питанием от CSI (Current Source Inverter) для анализа во временной и частотной областях.
Метод защиты от сбоев для системы однофазного асинхронного двигателя с питанием ZSI
Предложен метод защиты от сбоев с использованием двунаправленного преобразователя для облегчения работы инверторных приводов после отказа, который оказался эффективным методом снижения гармоник в системе привода во время возникновение неисправности.
ПРИВОД ТРЕХФАЗНОГО АИНХОННОГО ДВИГАТЕЛЯ С ИСПОЛЬЗОВАНИЕМ IGBT И МЕТОДОМ ПОСТОЯННОЙ V/F
- M.S.Aspalli., P. Hunagund
Engineering
- 2012
В этой статье представлены проектирование и анализ привода трехфазного асинхронного двигателя с использованием IGBT в силовом каскаде инвертора с управлением вольт-герц (V/F) в замкнутом контуре с использованием dsPIC30F2010 в качестве…
Сравнительные характеристики и Моделирование однофазного асинхронного двигателя с использованием многоуровневого инвертора
- Шивпал Р. Верма, Анкита Панде, Хардик А. Дэйв
Инженерное дело
- 2015
). Как правило, низкое качество напряжения и тока обычного асинхронного двигателя с инверторным питанием…
Обнаружение неисправностей преобразователя переменного тока в переменный, драйвер асинхронного двигателя с питанием от сети переменного тока
- В. Шарма
Инженерное дело
- 2013
(Инвертор источника тока) с питанием от асинхронного двигателя. В этой работе…
Влияние короткозамкнутого конденсатора звена постоянного тока инвертора AC–DC–AC на характеристики асинхронного двигателя
- H. A. Sher, K. Addoweesh, Y. Khan
Engineering
- 2016
Показ 1-10 из 10 ссылок
Анализ напряжения напряжения в ветерке статора IGBT PWM Inverter-FEDUCTION
44444444444444444444444444444444444444444444444444444.
- Дон-Хан Хван, ЁнДжун Ким, Сунгу Бэ, Донг-Хи Ким, Че-Гюн Ро, Ин-Ву Ли
Машиностроение
Шестая международная конференция по электрическим машинам и системам, 2003.
ICEMS 2003.- 2003
ШИМ-инвертор IGBT был обеспокоен пробоем изоляции и неравномерным распределением напряжения на обмотке статора из-за высокой скорости нарастания напряжения (dv/dt), вызванной высокочастотным переключением и…
Напряжения напряжения на обмотках статора асинхронные двигатели, управляемые инверторами IGBT PWM
- D. Hwang, Ki-Chang Lee, YongJun Kim, Sungwoo Bae, Dong-Hee Kim, Chae-Gyun Ro
Engineering
38th IAS Annual Meeting on Conference Record of the Industry Конференция по приложениям, 2003 г.
- 2003
В инверторе IGBT PWM пробой изоляции и неравномерное распределение напряжения на обмотке статора из-за высокой скорости нарастания напряжения (dv/dt), вызванной высокочастотным переключением и импедансом…
Отклик индукции во временной области Двигатели с питанием ШИМ
Асинхронные двигатели могут возбуждаться прямоугольными волнами напряжения, которые модулируются по ширине импульса в соответствии с широким спектром стратегий.
Определение производительности непосредственно во временной области имеет…Индикаторы неисправностей для определения колебаний крутящего момента асинхронных двигателей с переменной скоростью на основе тока статора с использованием частотно-временного анализа
- M. Blodt, J. Régnier, M. Chabert, J. Faucher
Engineering
1918110
В этой статье исследуется обнаружение небольших колебаний крутящего момента в приводах асинхронных двигателей во время переходных процессов скорости путем анализа тока статора. Небольшие колебания крутящего момента могут быть следствием…
Анализ характеристик тока двигателя и применение нечеткой логики для диагностики короткого замыкания в асинхронных двигателях
- L. Pereira, D. da Silva Gazzana, L. Pereira
Информатика
31-я ежегодная конференция IEEE Industrial Electronics Society, 2005. IECON 2005.
- 2005 9015 Система обнаружения и обнаружения диагностика межвитковых коротких замыканий в обмотках статора асинхронных двигателей и методы нечеткой логики обладают высокой степенью надежности, что позволяет использовать их в качестве средства контроля аналогичных двигателей.
Онлайн-диагностика асинхронных двигателей с использованием MCSA
Предлагается система онлайн-диагностики асинхронных двигателей с использованием анализа характеристик тока двигателя (MCSA) с усовершенствованными алгоритмами обработки сигналов и данных, способная определять четыре типа неисправностей двигателей и диагностировать состояние неисправности. асинхронного двигателя.
Анализ переходного процесса статор-ротор-гибридного замыкания в асинхронных двигателях с короткозамкнутым ротором
Статор-ротор-гибридного замыкания в асинхронных двигателях с короткозамкнутым ротором, означающего возникновение неисправности обрыва стержня ротора и межвиткового замыкания статорной обмотки одновременно было…
Обзор анализа характеристик асинхронных двигателей как средства обнаружения неисправностей
Фундаментальная теория, основные результаты и практическое применение анализа характеристик двигателей для обнаружения и локализации аномальных электрических и механических состояний, которые указывают или могут привести к , отказ асинхронных двигателей введен.
VIII. Ссылки
- Ф. Эшкрофт, Д. Харрисон, Эшкрофт
Науки об окружающей среде
- 1955
Allee BA. 1982. «Роль межвидовой конкуренции в распределении лососевых рыб в ручьях». Материалы симпозиума по миграционному поведению лосося и форели. Якорь окружающей среды. 2000.…
Материалы международной мультиконференции инженеров и компьютерных ученых, том II, IMECS 2009
- M. S. Khan, K. Benkrid
Engineering
- 2009
Bruichless DC Motors (BLDC). Моторные моторы BLDC) VSH) VS.) VSH) VSH) VSH) VSH) VS.) VS. Or Motors) VSH) VS.) VS.) VS.) VS.). Серводвигатели против инверторов
Скачать PDF
Слишком ценно, чтобы держать в секрете: мощность бесщеточных двигателей постоянного тока (BLDC Motors)
Когда дело доходит до управления скоростью, вы можете подумать, что выбор между трехфазным двигателем с инверторным приводом или серводвигателем, но знаете ли вы, что бесщеточные двигатели постоянного тока специализируются на регулировании скорости? Бесщеточный двигатель постоянного тока становится все более популярным в мире управления скоростью.
Однако не все знакомы с аспектами мощности и производительности бесщеточного двигателя постоянного тока. Даже в ситуациях использования, когда он продемонстрировал свои возможности, он имеет тенденцию отставать от двух ведущих игроков, трехфазного двигателя с инверторным управлением и серводвигателя. В этой статье представлены возможности бесщеточных двигателей постоянного тока, а также моменты, которые следует учитывать при выборе компактного двигателя с регулируемой скоростью.Инвертор или серводвигатель: что следует использовать для управления скоростью?
Когда дело доходит до управления скоростью, обычно выбирают трехфазный асинхронный двигатель, который регулирует скорость с помощью инвертора общего назначения. Для многих это может быть естественным выбором, поскольку позволяет свободно устанавливать временную скорость движения, которую можно изменить в будущем. Действительно, инвертор широко используется, но действительно ли он удовлетворяет основные потребности или устраняет распространенные жалобы?
Удобно ли менять скорость каждый раз при изменении задачи (вес или вязкость)?
Что произойдет, если вы хотите запустить конвейер на высокой скорости во время транспортировки продуктов, а затем на низкой скорости во время проверки?
При синхронизации скорости более чем двух конвейерных линий скорость необходимо регулировать, можно ли выполнить эту операцию просто?
Если необходимы скорость, крутящий момент или улучшенное управление, переход на серводвигатель, безусловно, является вариантом.
Однако, учитывая относительно низкую стоимость трехфазного двигателя с инверторным управлением, переходя на серводвигатель, вы столкнетесь с проблемой увеличения расходов. Серводвигатель стабилизирует скорость и решает проблему синхронизации нескольких конвейеров, но, принимая во внимание стоимость, почти наверняка потребуются компромиссы в вашей настройке. Есть ли продукт, которым легко пользоваться и который не ведет к увеличению затрат?На самом деле существует эффективная третья альтернатива. Бесщеточный двигатель постоянного тока похож по конструкции на серводвигатель, но специально разработан для управления скоростью.
Производительность серводвигателя по ценам инвертора: бесщеточные двигатели постоянного тока, третья альтернатива
Положение бесщеточного двигателя постоянного тока, говоря простыми словами, находится между инвертором и серводвигателем. Это двигатель, предназначенный для управления скоростью, который регулирует скорость так же эффективно, как серводвигатель, но по более низкой цене, близкой к цене инвертора.
Позвольте нам объяснить больше.• Система без обратной связи:
Асинхронный двигатель переменного тока Недостатки управления инвертором
Большинство инверторов асинхронных двигателей переменного тока не взаимодействуют с двигателем, однако в последнее время к двигателю или движущимся частям добавляются дополнительные энкодеры или аналоговые сигнальные устройства. , это становится вариантом. Недостатком являются дополнительные затраты и настройка на типично недорогое решение. Большинство современных инверторов по-прежнему работают в разомкнутом контуре. В разомкнутой системе при изменении нагрузки фактическая скорость не соответствует заданной. Вот почему скорость изменяется (медленнее, когда добавляется дополнительная нагрузка) и в зависимости от нагрузки, поэтому синхронизация скорости по нескольким осям затруднена.
Кроме того, поскольку крутящий момент двигателя переменного тока на высоких или низких скоростях ниже номинальной скорости, что является неотъемлемой характеристикой крутящего момента трехфазного двигателя, трудно получить желаемую скорость и крутящий момент при в то же время.
Инвертор эффективен, когда работа продолжается на фиксированной скорости, но он не идеален для многоскоростных операций.Тепло также является обычным компонентом асинхронных двигателей переменного тока. Для борьбы с этим к задней части двигателя прикреплен охлаждающий вентилятор. Из-за конструкции асинхронных двигателей переменного тока тепло увеличивается, когда двигатель работает медленно, а охлаждающий вентилятор работает медленнее. И наоборот, когда двигатель работает на высокой скорости, тепло от обмоток также увеличивается.
• Управление с обратной связью: Серводвигатели и бесщеточные двигатели постоянного тока
с отличными скоростными характеристиками -контур управления скоростью, при котором состояние работы двигателей возвращается к водителю. Это обеспечивает постоянную скорость двигателя на заданном уровне и позволяет синхронизировать скорость двух осей двигателя. Кроме того, создается плоский крутящий момент независимо от того, работает ли он на высокой или низкой скорости.
Даже при изменении нагрузки, независимо от заданной скорости, обеспечивается стабильная скорость движения. Это означает, что эти два двигателя очень эффективны в ситуациях, когда инвертор не справляется.Дорогой универсал в сравнении с недорогим специализированным двигателем
• Разница между серводвигателями и бесщеточными двигателями постоянного тока:
Излишне говорить, что серводвигатель отличается от бесщеточного двигателя постоянного тока. Вообще говоря, разница заключается в том, что один из них обеспечивает высокую производительность и всесторонний контроль скорости, а другой предназначен исключительно для контроля скорости.
В серводвигателе энкодер крепится к двигателю, что делает возможным высокоточное и точное управление положением, скоростью и крутящим моментом. Это высокоэффективный универсальный двигатель. Точный энкодер — очень дорогая часть двигателя, хотя это зависит от разрешающей способности энкодера.
Что касается бесщеточного двигателя постоянного тока, его функция сосредоточена на управлении скоростью.
Если управление положением не требуется, скорость можно контролировать с достаточной точностью с помощью интегральной схемы (датчика) на эффекте Холла. ИС на эффекте Холла проще и дешевле энкодеров. Короче говоря, поскольку они специализируются на управлении скоростью, бесщеточные двигатели постоянного тока стоят намного меньше, чем универсальные серводвигатели.Это то же самое для редуктора скорости (зубчатого редуктора), жизненно важного компонента конвейерных линий. В бесщеточном двигателе постоянного тока можно использовать стандартную прямозубую шестерню, которая имеет небольшие размеры и во многих случаях такая же, как и в трехфазном двигателе.
В случае серводвигателя, который способен выполнять высокоточное позиционирование и высокую скорость, обычно используются редукторы (зубчатые головки) с планетарным механизмом. Это естественно увеличивает стоимость мотора.
Отличительные особенности бесщеточного двигателя постоянного тока, кроме регулирования скорости:
Не требуется настройка, компактный размер двигателя, энергосбережение
Высокоточное регулирование скорости по разумной цене — не единственное преимущество бесщеточного двигателя постоянного тока с регулированием скорости.
По сравнению с трехфазным двигателем с инверторным управлением бесщеточный двигатель постоянного тока тоньше и имеет более высокий крутящий момент. Поскольку в роторе используется постоянный магнит, двигатель тоньше и имеет большую мощность. По сравнению с трехфазным асинхронным двигателем с размером корпуса 3,54 дюйма (90 мм) бесщеточный двигатель постоянного тока с такими же характеристиками на 3,31 дюйма (84 мм) короче и обеспечивает в 1,3 раза большую выходную мощность. Эта компактная конструкция двигателя позволяет уменьшить размер вашего оборудования.
Поскольку бесщеточный двигатель постоянного тока предназначен для управления скоростью, его можно использовать сразу же, не выполняя настройку или регулировку параметров, которые требуются для инверторов и серводвигателей, что экономит время и силы.
Драйверы бесщеточных двигателей постоянного тока обычно доступны с входным напряжением переменного или постоянного тока. Это обеспечивает большую гибкость конструкции.
Например, если машина используется во многих странах, где потребляемая мощность отличается от страны к стране, желательно использовать вход постоянного тока или если требуется вход от батареи 24–48 В постоянного тока. Если требуется простой вход переменного тока, будь то 115 В переменного тока или 220–230 В переменного тока, однофазный или трехфазный, доступны эти общие драйверы входного напряжения.Драйверы бесщеточных двигателей постоянного тока также, как правило, очень просты в интерфейсе, оставаясь верными концепции двигателя без настройки. Управление скоростью может быть таким же простым, как вращение потенциометра скорости, или удобным аналоговым 0-10 В постоянного тока от ПЛК или хост-системы. Многие драйверы бесколлекторных двигателей постоянного тока в настоящее время поставляются со встроенными средствами связи, что позволяет использовать сетевые соединения на общей платформе в качестве опции.
Хотя мы кратко коснулись этого ранее, существенным преимуществом бесщеточного двигателя постоянного тока является использование более дешевого прямозубого редуктора (редуктора).
Поскольку не требуется высокоточное позиционирование или дорогие подшипники для работы с крутящими моментами или высокими осевыми нагрузками, в бесщеточных двигателях постоянного тока обычно используется тот же тип шестерен, что и в асинхронном двигателе переменного тока. Это позволяет легко модернизировать и не требует обслуживания. Поскольку сокращение пространства, особенно на конвейерных линиях, имеет важное значение, широко распространено использование параллельных прямозубых редукторов. Там, где может потребоваться больший крутящий момент, доступны новые плоскоцилиндрические редукторы с полым валом, которые значительно увеличивают допустимый крутящий момент.Мы составили сводку (Таблица 1), в которой эти три технологии сравниваются в простом для понимания формате. Мы также включили обзор преимуществ бесщеточных двигателей постоянного тока под названием «Пятиминутное руководство по основам бесщеточных двигателей постоянного тока».
Таким образом, хотя бесщеточные двигатели постоянного тока не являются новинкой на рынке, их преимущества становятся все более известными, поскольку все больше и больше OEM-производителей выбирают бесщеточные двигатели постоянного тока вместо асинхронных двигателей переменного тока с инверторами.
В то время как серводвигатели предлагают множество функций производительности, если все, что требуется от управления скоростью, заслуживают внимания бесщеточные двигатели постоянного тока.Пятиминутное руководство по основам работы с бесщеточными двигателями постоянного тока
• Структура и принцип работы
Бесщеточный двигатель постоянного тока регулирует скорость в замкнутой системе. На основе сигнала, обнаруженного интегральной микросхемой (датчиком) эффекта Холла, установленной на двигателе, транзистор в цепи привода включается и выключается, и двигатель вращается. Его обычно называют бесщеточным двигателем постоянного тока. Это название отражает предысторию того, как был создан механический контакт между щеткой и коллектором, который был слабым местом двигателя постоянного тока, был заменен электрической обработкой, а техническое обслуживание стало ненужным.
Характеристики бесщеточного двигателя постоянного тока
• Стабильное управление скоростью
Постоянно сравнивая установленную скорость и сигнал обратной связи по скорости от двигателя, он регулирует напряжение, подаваемое на двигатель.
Даже при изменении нагрузки он способен поддерживать стабильную работу от высоких до низких оборотов.• Компактный и мощный
По сравнению с трехфазным двигателем с инверторным управлением бесщеточный двигатель постоянного тока тоньше и имеет более высокий крутящий момент. Поскольку в роторе используется постоянный магнит, двигатель тоньше и имеет большую мощность.
• Регулятор скорости в широком диапазоне
Регулятор скорости охватывает более широкий диапазон, чем инвертор. Когда трехфазный асинхронный двигатель приводится в действие инвертором, крутящий момент становится ограниченным на низких скоростях. Бесщеточный двигатель постоянного тока без ограничений подходит для ситуаций, когда требуется постоянный крутящий момент от высоких до низких скоростей.
• Контроль энергоэффективности
В роторе бесщеточного двигателя постоянного тока используется постоянный магнит для устранения вторичных потерь. По сравнению с трехфазным асинхронным двигателем с инверторным управлением* он снижает энергопотребление примерно на 23 %, что способствует повышению энергоэффективности.