





Холловский двигатель — один из видов электрического ракетного двигателя (иногда используется термин плазменный двигатель). Более эффективен по сравнению с исторически первым ионным двигателем, но уступает магнитоплазмодинамическому (МПД) двигателю. Таким образом, холловский двигатель занимает среднее положение среди семейства плазменных двигателей.

 Схема холловского двигателя
Схема холловского двигателя Принцип действия холловского двигателя был открыт в 1879 году Эдвином Холлом (Edwin H. Hall). Холл выяснил, что в расположенных в едином проводнике перпендикулярно друг другу электрическом и магнитном полях начинает действовать особый вид тока, названный впоследствии в его честь холловским (это явление получило название эффект Холла). В холловском двигателе есть внутренний положительный анод и внешний отрицательный катод. Между ними образуется электрическое поле, в которое поступает газ ксенон. Электрическое поле выбивает из нейтральных атомов газа отрицательные частицы (электроны), превращая тем самым их в положительные ионы. Эти частицы (отрицательные электроны и положительные ионы в виде плазмы) подхватывает холловский ток и направляет его в перпендикулярное магнитное поле, которое расположено по оси двигателя. Здесь холловский ток разгоняет частицы по оси магнитного поля и выбрасывает их из сопла.
И если в ионном двигателе ускоряются только положительные ионы, то в холловском двигателе задействовано всё рабочее тело (как положительные ионы, так и отрицательные электроны). Поэтому у холловского двигателя в отличие от ионного нет ограничений по объемному заряду, и он дает более высокую плотность тяги и — соответственно — большее ускорение. В СССР разработка холловских двигателей велась с начала 1960-х годов, а на Западе — с начала 1990-х.
В 1962 году создана первая теоретическая модель и описание холловского двигателя.
В 1972 году состоялось первое испытание холловского двигателя на практике на советском спутнике «Метеор».
Тактико-технические характеристики холловского двигателя:
В настоящее время на орбитальных аппаратах функционирует больше 200 холловских двигателей. Холловский двигатель использовало Европейское космическое агентство для полета к Луне зонда SMART 1.
В ноябре 2014 года в связи с появлением космического объекта 2014-28Е (так называемого российского «убийцы спутников»), высказывались предположения, что он может быть оснащён плазменным двигателем холловского типа.[1]
cyclowiki.org
Использование: в электроракетных двигательных установках космических аппаратов. Сущность изобретения: двигатель содержит анод, катод-нейтрализатор, магнитную систему, ускорительный канал и систему управления вектором тяги, воздействующую на поток ускоряемого рабочего тела неоднородными по азимуту электромагнитными полями. У выходного среза канала двигателя установлены электроды, размещенные последовательно один за другим по азимуту. Канал в зоне ускорения выполнен с увеличивающимся вниз по потоку и изменяющимся по азимуту в соответствии с местоположением источников магнитодвижущей силы внешних секций магнитной системы расстоянием между внутренней и внешней стенками канала. Количество внешних секций магнитной системы не менее трех. Полюса внешних секций могут быть смещены вниз по потоку относительно полюса внутренней секции. Величина смещения не превышает половины расстояния между внутренним и внешним полюсами. Изменение расстояния между стенками канала может быть выполнено изменением профиля внешней стенки. 3 з.п. ф-лы, 3 ил.
Изобретение относится к плазменной технике и может быть использовано при конструировании электрических ракетных двигателей, в частности плазменных ускорителей с замкнутым дрейфом электронов, предназначенных для работы в космических условиях для коррекции орбиты и ориентации космических аппаратов, а также в технологии обработки материалов.
Известны плазменные ускорители (двигатели) с замкнутым дрейфом электронов (или холловские ускорители), которые в зависимости от токопроводящих свойств материала стенок ускорительного канала условно делятся на два типа: стационарный плазменный двигатель (СПД) материал стенок диэлектрик, двигатель с анодным слоем (ДАС) материал стенок проводник. Холловский двигатель создает тягу в фиксированном направлении, и для управления космическим аппаратом (спутником) необходимо использовать или, как минимум, два двигателя, или дополнительный механизм поворота двигателя относительно аппарата. Использование двух двигателей дорого и увеличивает вес аппарата, а поворачивающий (шарнирный) механизм тяжел, сложен и ненадежен. Ближайшим техническим решением является плазменный ускоритель с замкнутым дрейфом электронов, содержащий азимутально замкнутый ускорительный канал, имеющий зону ионизации и зону ускорения рабочего тела, ограниченный внутренней и внешней стенками и открытый на выходе анод, расположенный в начале канала вверх по потоку, по крайней мере один катод-нейтрализатор, размещенный за выходным срезом вниз по потоку, магнитную систему, состоящую из четырех симметричных периферийных внешних независимых, размещенных последовательно одна за другой по азимуту, и центральной внутренней секций, связанных магнитопроводом и имеющих каждая источник магнитодвижущей силы и полюс, размещенный у выходного среза [2] Недостатком этого устройства является слабая эффективность отклонения вектора тяги, которое не превышает 1,5 при условии сохранения остальных параметров ускорителя неизменными. По существу в этом устройстве возможности по отклонению вектора тяги могут использоваться лишь для юстировки направления вектора тяги, но не для управления космическим аппаратом. Техническим результатом предложенного технического решения является увеличение диапазона отклонения вектора тяги при сохранении остальных параметров ускорителя на прежнем уровне, тем самым создание реальных возможностей для управления космическим аппаратом. Технический результат достигается тем, что в плазменном ускорителе с замкнутым дрейфом электронов, содержащем азимутально замкнутый ускорительный канал, имеющий зону ионизации и зону ускорения рабочего тела, ограниченный внутренней и внешней стенками и открытый на выходе, анод, расположенный в начале канала вверх по потоку, по крайней мере один катод-нейтрализатор, размещенный за выходным срезом вниз по потоку, магнитную систему, состоящую из периферийных внешних независимых, размещенных последовательно одна за другой по азимуту, и центральной внутренней секций, связанных магнитопроводом и имеющих каждая источник магнитодвижущей силы и полюс, размещенный у выходного среза, дополнительно введены электроды, установленные у выходного среза последовательно один за другим по азимуту, при этом число внешних секций не менее трех, причем канал в зоне ускорения выполнен с увеличивающимся вниз по потоку и изменяющимся по азимуту в соответствии с местоположением источников магнитодвижущей силы внешних секций расстоянием между стенками; при этом внешние полюса и выходной срез внешней стенки смещены вниз по потоку относительно внутреннего полюса и выходного среза внутренней стенки, соответственно, причем величины смещений не превышают половины расстояния между полюсами и стенками, соответственно, причем увеличение расстояния между стенками выполнено изменением профиля внешней стенки. На фиг. 1 и 2, схематично показан двигатель со стороны выходного среза для случая трех внешних магнитных секций и соответственно трех дополнительных электродов; на фиг. 3 разрез в плоскости его оси. Ускоритель содержит ускорительный канал 1 с зоной ионизации 2 и зоной ускорения 3, анод 4, расположенный в канале, катод 5, расположенный вне канала, внутреннюю 6 и внешнюю 7 стенки, ограничивающие канал, магнитную систему, состоящую из центральной внутренней секции с сердечником 8 и периферийных внешних секций с сердечниками 9, 10, 11, магнитопровода 12, связывающего секции, полюса 13, 14, 15, 16 секций и их источники магнитодвижущей силы 17, 18, 19, 20, электроды 21, 22, 23, расположенные в области среза, магнитные экраны 24 и 25. Ускоритель работает следующим образом. В рабочем теле, например ксеноне, в ускорительном канале после подачи напряжения на анод 4, выполненный из тугоплавкого материала, например, молибдена, зажигается разряд. В зоне ионизации 2 канала 1 образуются электроны и ионы, причем ионы, проходя зону ускорения 3, формируются внешним полем в поток, создающий тягу двигателя. Заряд ионов потока компенсируется электронами, эмитируемыми катодом-нейтрализатором 5 (например, полым катодом с высокоэффективным термоэмиттером из гексаборида лантана). Источники магнитодвижущей силы 17, 18, 19, 20, например, катушки, с помощью магнитопровода 12 и сердечников 9, 10, 11, выполненных из магнитомягкого материала, создают между полюсом 13 внутренней секции и полюсами 14, 15, 16 внешних секций, также выполненных из магнитомягкого материала, магнитное поле, преимущественно перпендикулярное направлению потока. Корректировка магнитного поля осуществляется выбором конфигурации магнитных экранов 24 и 25. Это поле замагничивает электроны и затрудняет их перемещение на анод, поэтому основная часть тока в ускорителе переносится ионами, что и требуется для его нормального функционирования. Для осуществления поворота вектора тяги меняют величину тока по крайней мере в одной из катушек 18, 19, 20 и прикладывают потенциал по крайней мере на один из электродов 21, 22, 23, выполненных из тугоплавкого металла, например из молибдена, и установленных у среза внешней стенки. Изменение тока в одной из внешних катушек, например 18, меняет конфигурацию магнитного поля между внешним полюсом 14, соответствующим этой катушке, и внутренним полюсом 13, при этом здесь, в зоне ускорения, изменяется конфигурация электрического поля (в холловском двигателе магнитное и электрическое поля взаимосвязаны). Одновременная подача на электрод 21, соответствующий этой внешней секции, потенциала, например обеспечивающего интенсивное стекание электронов из плазмы на него, создает радиальное электрическое поле в этой области. Хотя величина этого поля может быть относительно мала (порядка 10 В/см), изменения радиальной составляющей скорости иона при внешнем осевом поле порядка 300 В/см составит (1/30)1/2 20% Совместное действие таких изменений электрического поля в одной из азимутальных секций канала приведет к значительному по сравнению с прототипом отклонению направления потока ионов в этой секции, то есть повороту вектора тяги. Эксперименты дают величину угла отклонения вектора тяги не менее
20% Совместное действие таких изменений электрического поля в одной из азимутальных секций канала приведет к значительному по сравнению с прототипом отклонению направления потока ионов в этой секции, то есть повороту вектора тяги. Эксперименты дают величину угла отклонения вектора тяги не менее  5o. Расширение канала в зоне ускорения изменением профиля внешней стенки 7 (то есть если образующая внутренней стенки 6 параллельна оси, то внешняя 7 должна отклоняться от оси) усилит этот эффект, так как уменьшит число ионов потока, перехватываемых стенкой 7 канала, выполняемой из материала, стойкого к ионному распылению, например, нитрида бора. Периодическое изменение по азимуту ширины канала играет ту же роль, что и расширение, а одновременно позволит исключить отрицательное влияние азимутальной неоднородности магнитного поля, вызванной локальностью местоположения источников магнитодвижущей силы внешних секций, на номинальном режиме, то есть без отклонения вектора тяги, что увеличивает ресурс на 20-30% Дополнительной эффективности в управлении вектором тяги достигают увеличением неоднородности магнитного поля в области среза: смещением вниз по потоку внешних полюсов 14, 15, 16 по отношению к внутреннему 13. Для снижения эрозии стенок канала выходной срез внешней стенки 7 смещают вниз по потоку по отношению к выходному срезу внутренней стенки 6. В этом случае для уменьшения эрозии внешней стенки увеличение расстояния между стенками создают изменение угла наклона образующей внешней стенки. Для увеличения эффективности управления вектором тяги с помощью электродов последние делают максимально протяженными в азимутальном направлении. Для того, чтобы иметь возможность осуществлять поворот вектора тяги в двух независимых плоскостях, необходимо иметь по крайней мере три азимутальные секции канала, где производят изменения электромагнитных полей и геометрии. Таким образом, предложенное техническое решение позволяет осуществить новую технологию поворота вектора тяги, когда комплексное воздействие на поток ионов в зоне ускорения магнитное, электрическое и геометрическое (причем, в осевом и азимутальном направлениях, а также осевое смещение центральной части относительно периферийной) обеспечивает возможность эффективного поворота вектора тяги, а следовательно и управления движением космического аппарата.
5o. Расширение канала в зоне ускорения изменением профиля внешней стенки 7 (то есть если образующая внутренней стенки 6 параллельна оси, то внешняя 7 должна отклоняться от оси) усилит этот эффект, так как уменьшит число ионов потока, перехватываемых стенкой 7 канала, выполняемой из материала, стойкого к ионному распылению, например, нитрида бора. Периодическое изменение по азимуту ширины канала играет ту же роль, что и расширение, а одновременно позволит исключить отрицательное влияние азимутальной неоднородности магнитного поля, вызванной локальностью местоположения источников магнитодвижущей силы внешних секций, на номинальном режиме, то есть без отклонения вектора тяги, что увеличивает ресурс на 20-30% Дополнительной эффективности в управлении вектором тяги достигают увеличением неоднородности магнитного поля в области среза: смещением вниз по потоку внешних полюсов 14, 15, 16 по отношению к внутреннему 13. Для снижения эрозии стенок канала выходной срез внешней стенки 7 смещают вниз по потоку по отношению к выходному срезу внутренней стенки 6. В этом случае для уменьшения эрозии внешней стенки увеличение расстояния между стенками создают изменение угла наклона образующей внешней стенки. Для увеличения эффективности управления вектором тяги с помощью электродов последние делают максимально протяженными в азимутальном направлении. Для того, чтобы иметь возможность осуществлять поворот вектора тяги в двух независимых плоскостях, необходимо иметь по крайней мере три азимутальные секции канала, где производят изменения электромагнитных полей и геометрии. Таким образом, предложенное техническое решение позволяет осуществить новую технологию поворота вектора тяги, когда комплексное воздействие на поток ионов в зоне ускорения магнитное, электрическое и геометрическое (причем, в осевом и азимутальном направлениях, а также осевое смещение центральной части относительно периферийной) обеспечивает возможность эффективного поворота вектора тяги, а следовательно и управления движением космического аппарата.Формула изобретения
1. Холловский двигатель на основе ускорителя с замкнутым дрейфом электронов, содержащий азимутально замкнутый ускорительный канал, имеющий зону ионизации и зону ускорения рабочего тела, ограниченный внутренней и внешней стенками и открытый на выходе, анод, расположенный в начале канала вверх по потоку по крайней мере один катод-нейтрализатор, размещенный за выходным срезом вниз по потоку, магнитную систему, состоящую из периферийных внешних независимых, размещенных последовательно одна за другой по азимуту, и центральной внутренней секций, связанных магнитопроводом и имеющих каждая источник магнитодвижущей силы и полюс, размещенный у выходного среза, отличающийся тем, что дополнительно введены электроды, установленные у выходного среза последовательно один за другим по азимуту, при этом число внешних секций не менее трех, причем канал в зоне ускорения выполнен с увеличивающимся вниз по потоку и изменяющимся по азимуту в соответствии с местоположением источников магнитодвижущей силы внешних секций расстоянием между стенками. 2. Двигатель по п.1, отличающийся тем, что полюса внешних секций смещены вниз по потоку относительно полюса внутренней секции, причем величина смещения не превышает половины расстояния между внешними и внутренними полюсами. 3. Двигатель по п.2, отличающийся тем, что выходной срез внешней стенки смещен вниз по потоку по отношению к выходному срезу внутренней стенки, причем величина смещения не превышает половины расстояния между внутренней и внешней стенками. 4. Двигатель по п.1, отличающийся тем, что увеличение расстояний между стенками канала выполнено изменением профиля внешней стенки.РИСУНКИ
Рисунок 1, Рисунок 2, Рисунок 3www.findpatent.ru
 Схема двигателя на эффекте Холла с протяжённой зоной ускорения
Схема двигателя на эффекте Холла с протяжённой зоной ускорения Двигатель на эффекте Холла — разновидность ионного двигателя, в котором используется эффект Холла. При равных размерах с обычным ионным, холловский двигатель обладает большей тягой. Двигатели используются на космических аппаратах с 1972 года[1].
Холловский двигатель состоит из кольцевой камеры между анодом и катодом, вокруг которой расположены магниты. С одной стороны в камеру подаётся рабочее тело, с другой стороны происходит истекание плазмы. Нейтрализация положительного заряда плазмы производится электронами, эмитируемыми с катода.
По принципиальной схеме холловские двигатели делятся на двигатели с анодным слоем (ДАС) и с протяжённой зоной ускорения (СПД).
Между анодом и катодом обеспечивается разность потенциалов. В кольцевую камеру подаётся рабочее тело (например, ксенон). Разряд между анодом и катодом ионизирует рабочее тело. Под действием электростатического поля ионы разгоняются в осевом направлении. В радиальном направлении действует магнитная сила, которая в соответствии с эффектом Холла приводит к появлению тока в азимутальном направлении. Возникающая сила Лоренца ускоряет электроны, что создаёт дополнительную тягу. Движение электронов также устраняет ограничение по плотности тока, характерное для обычного ионного двигателя, и позволяет достичь относительно высоких значений расхода рабочего тела, и, как следствие, тяги двигателя[2][1].
Применение холловских двигателей в СССР началось в 1972 году[1]. Их серийное производство налажено в 1982 году[3]. Наиболее современным из этих двигателей является SPT-140, в 2017 году выведший на целевую орбиту спутник Eutelsat 172B[4].
В 2017 году на орбиту запущен спутник VENµS[en] с установленным на нём холловским двигателем нового поколения производства израильской компании «Рафаэль»[5].
wikiredia.ru
В статье проведен обзор современного состояния развития электроракетных двигателей с магнитной системой, основанной на постоянных магнитах. Рассмотрены основные параметры таких двигателей и проведено сравнение с электроракетными двигателями с классической схемой магнитной системы на электромагнитных катушках.
Ключевые слова: электроракетные двигатели, постоянные магниты, ЭРД малой мощности
Электроракетные двигатели холловского типа могут быть нескольких видов. Одним из них являются стационарные плазменные двигатели (СПД). Данный вид двигателей находит широкое применение на борту современных космических аппаратов (КА). Так как в настоящее время всё больший интерес представляют малые космические аппараты, то расширяются работы по созданию малых КА нового поколения, которые могут быть использованы для решения различных задач, в том числе для телекоммуникации и дистанционного зондирования Земли. Интерес к созданию и последующему использованию малых космических аппаратов объясняется их относительно низкой стоимостью, сокращением сроков разработки и изготовления, снижением риска больших финансовых потерь в случае неудачного запуска, а также уменьшением стоимости вывода таких аппаратов на орбиту и их последующей эксплуатации.
В связи с этим значительно вырос интерес к созданию дешевых и надежных двигательных установок на базе электрических ракетных двигателей (ЭРД) малой мощности. Основные функции, которые должен выполнять двигатель на борту КА — это коррекция орбиты КА, удержание его на заданной орбите, сохранение нужной ориентации в пространстве. Под данное описание и задачи хорошо подходят стационарные плазменные двигатели малой мощности. Маленькими называют, как правило, ускорители с мощностью менее 500 Ватт и средним диаметром ускоряющего канала менее 50 мм. [1]
Так как маленькие двигатели предполагается использовать на малых космических аппаратах, возникает задача по снижению потребляемой двигателем электрической мощности. Значительную часть энергии, потребляемой СПД малых размеров, составляет энергия, используемая для создания необходимого магнитного поля в электромагнитных катушках. В качестве альтернативы, для создания необходимой конфигурации магнитного поля, но без затрат электроэнергии, предполагается использовать магнитную систему, основанную на постоянных магнитах. Данное изменение, а именно — выбор постоянных магнитов вместо электромагнитных катушек позволяет также убрать один источник питания, что благоприятно сказывается на массогабаритных характеристиках двигательной установки. Кроме прямого снижения затрачиваемой двигателем мощности это приводит еще и к снижению тепловыделения в двигателе.
Для создания представления о положении дел в данном направлении рассмотрим несколько типичных представителей СПД малой мощности, основанных на классической схеме с электромагнитными катушками. Характеристики двигателей для удобства сведены в таблицу 1.
Таблица 1
Характеристики СПД малой мощности склассической схемой магнитной системы [2]
| Модель ЭРД | Wd, [Вт] | Vd, [В] | mA, [г/с] | F, [мН] | Iуд., [с] | 𝜂A | 𝜂 |
| SPT-50 | 310 | 280 | 1.26 | 18 | 1450 | 0.42 | 0.32 |
| 138 | 282 | 0.68 | 8 | 1100 | 0.34 | 0.29 | |
| 110 | 0.60 | 8 | |||||
| 86 | 201 | 0.51 | 5.3 | 850 | 0.32 | 0.21 | |
| 47 | 135 | 0.30 | 3.2 | 950 | |||
| KM-37 | 200 | 270 | 0.80 | 11.7 | 1405 | 0.40 | |
| 150 | 236 | 0.70 | 8.7 | 1180 | 0.34 | ||
| 100 | 192 | 0.60 | 5.7 | 895 | 0.24 | ||
| KM-32 | 160 | 168 | 0.74 | 10.4 | 1410 | 0.45 | |
| X-40 | 189 | 320 | 0.50 | 8.5 | 1700 | 0.38 | |
| 110 | 200 | 0.50 | 5.8 | 1160 | 0.31 | ||
| SPT-30 | 202 | 200 | 0.98 | 11.3 | 1170 | 0.32 | 0.29 |
| 90 | 150 | 0.61 | 4.9 | 819 | 0.22 | 0.19 | |
| SPT-25 | 134 | 180 | 0.59 | 5.5 | 948 | 0.22 | |
| 59 | 100 | 0.59 | 3.2 | 554 | 0.17 | 0.14 | |
| ВHТ-200 | 200 | 300 | 0.70 | 11.4 | 1500 | 0.41 | 0.35 |
| 100 | 192 | 0.35 | 3.8 | 1100 | 0.20 | 0.15 | |
| D-38 | 212 | 95 | 2.23 | 12.9 | 700 | 0.21 | |
| 220 | 250 | 0.88 | 11.4 | 1336 | 0.33 | ||
| 110 | 200 | 0.62 | 5.1 | 862 | 0.19 | ||
| T-27 | 201 | 251 | 0.70 | 9.6 | 1430 | 0.33 | |
| 114 | 190 | 0.53 | 5.3 | 1033 | 0.23 | ||
| MIT | 100 | 250 | 0.21 | 1.6 | 773 | 0.063 | |
| 42 | 200 | 0.17 | 0.85 | 515 | 0.050 |
Из таблицы видно, что многие двигатели могут работать в различных режимах, а не только в расчётных. Таблица помогает получить представления о значениях основных параметров, к которым стоит стремиться при разработке нового двигателя, если стоит задача проектирования. При этом важно отметить, что КПД двигателей, представленных в таблице, достаточно мал (10–30 %), что является характерной чертой маленьких холловских ускорителей. [3]
Далее в статье будут рассматриваться различные двигатели холловского типа, в основе магнитной системы которых применяются постоянные магниты. Как правило, это небольшие двигатели, так как эффективное отведение тепла из конструкции двигателя в космосе является сложной задачей, однако есть и крупные лабораторные образцы, охлаждение которых на Земле не составляет проблем. Рассматриваемые двигатели разработаны в различных странах, имеющих собственные космические программы. Основная цель таких разработок — доведение конструкций до состояния, пригодного для использования на борту космических аппаратов.
Данный двигатель (рис. 1) был разработан и изготовлен в Принстонской лаборатории физики плазмы (США). Двигатель цилиндрического типа с диапазоном мощности от 50 до 300 ватт. Диаметр разрядной камеры составляет 26 мм. Габаритные размеры двигателя составляют: 55 мм диаметр и 35 мм длина. Магнитная система состоит из магнитопровода и двух кольцевых Co-Sm магнитов, расположенных на внешней части магнитопровода. Масса двигателя составляет 350 грамм. Для сравнения, аналогичный двигатель, но с магнитной системой на электромагнитных катушках имеет массу в 2 раза больше — 700 грамм и значительно большие габаритные размеры: 78 мм в диаметре и 70 мм в длину.
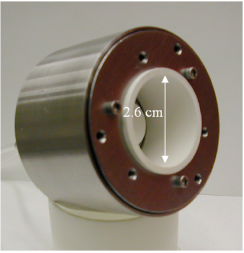
Рис. 1. Цилиндрический холловский двигатель CHTpm на постоянных Co-Sm магнитах
При одинаковых геометрических параметрах магнитной системы постоянные магниты позволяют получать различную конфигурацию магнитного поля, зависящую от взаимного расположения магнитных полюсов кольцевых магнитов (рис. 2). Магнитопровод двигателя изготовлен из низкоуглеродистой стали.
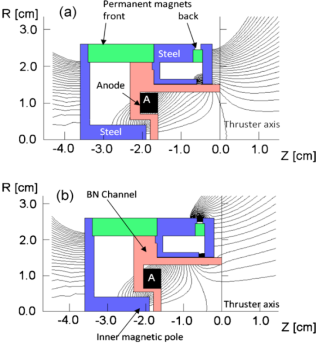
Рис. 2. Различные конфигурации магнитного поля двигателя, при (а) сонаправленном расположении магнитных полюсов, (b) противоположном
Данный двигатель (рис. 3) был разработан и изготовлен в университете технологий города Осака, Япония. Двигатель цилиндрического типа с диапазоном мощности от 30 до 190 ватт. При различных условиях удавалось получить значения тяги от 1,8 мН до 7,3 мН, а также значения удельного импульса от 250 до 940 секунд. Однако КПД данного двигателя очень мал и составляет менее 3 %. Магнитная система состоит из магнитопровода и цилиндрических постоянных Co-Sm магнитов, расположенных в 8 сборках, равномерно распределенных по радиусу. Каждая сборка состоит из 5 магнитов. В качестве рабочего тела в двигателе используется ксенон.
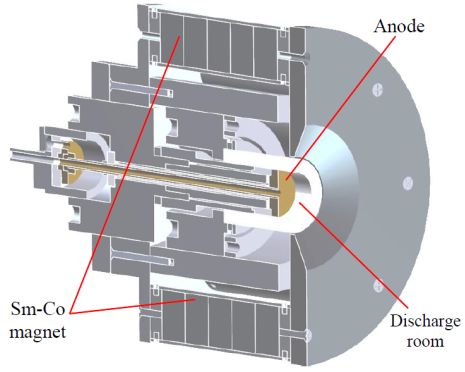
Рис. 3. Двигатель TCHT-5 в разрезе
Далее будем рассматривать более привычные холловские ускорители, не цилиндрические, а те в которых присутствует ускоряющий канал. В связи с тем, что в космической отрасли все изменения происходят плавно, такие конструкции имеют гораздо большие шансы на воплощение, так как данный тип конструкции является более отработанным на двигателях с электромагнитными катушками.
Двигатели данной линейки разрабатываются для будущих миссий космической программы Бразилии. Разработки ведутся совместно в лаборатории физики плазмы университета Бразилии и на факультете аэрокосмической промышленности университета Бразилии.
Двигатель PHALL 1 (рис. 4, 5) имеет внешний диаметр 30 см. Тягу в диапазоне от 26,5 до 126 мН, удельный импульс от 803,5 до 1607 секунд. Потребляемая им мощность составляет 1250 ватт и КПД до 8,4 %. В магнитной системе данного двигателя используются постоянные Co-Sm магниты в форме параллелепипедов.
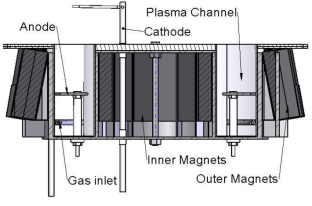
Рис. 4. Двигатель PHALL 1 в разрезе
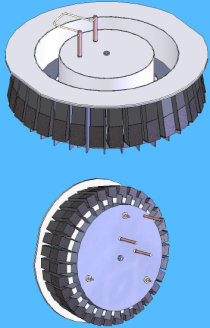
Рис. 5. Компьютерная модель двигателя PHALL 1
Однако гораздо более интересным двигателем с точки зрения малых КА можно считать двигатель PHALL 2 (рис. 6). Так как он имеет меньший внешний диаметр (15 сантиметров), тягу от 23 до 150 мН, удельный импульс от 1500 до 2000 секунд, а потребляемая двигателем мощность находится в интервале от 500 до 1000 ватт. При этом двигатель обладает высоким КПД: от 45 до 60 %. В случае с данной модификацией проводились опыты с разными магнитами в магнитной системе. В первом случае это были Co-Sm магниты (рис. 6), а во втором — применялись магниты с составом Nd-Fe-B, при сохранении геометрии магнитопроводов (рис. 7).
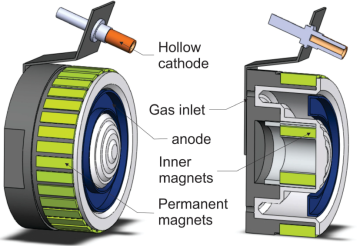
Рис. 6. Двигатель PHALL 2 с Co-Sm магнитами
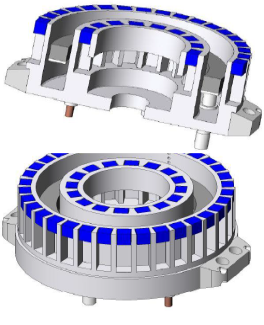
Рис. 7. Магнитная система двигателя PHALL 2 с Nd-Fe-B магнитами
Разработки электроракетного двигателя PPI с магнитной системой, основанной на постоянных магнитах, ведутся также и во Франции. Этим занимается международная команда специалистов из нескольких человек. На данный момент разработан и изготовлен первый опытный образец (рис. 8).
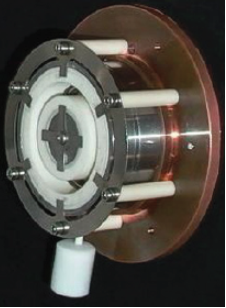
Рис. 8. Двигатель PPI
В основе магнитной системы данного двигателя применяются постоянные Co-Sm магниты. Для их эффективного охлаждения используется медное охлаждаемое основание. Путем многочисленных замен магнитов и изменения их геометрии была создана необходимая конфигурация магнитного поля в ускорительном канале. Для данного двигателя приводится крайне мало характеристик, известно лишь то, что тяга данного двигателя составляет 10 мН.
Данный двигатель (рис. 9, 10) был разработан, а затем полностью протестирован в Массачусетском технологическом институте, США. При своем маленьком диаметре канала — 9 мм, двигатель способен работать в очень широком диапазоне мощности от 20 до 516 ватт. Расчетная мощность данного двигателя 200 ватт, рабочий газ — ксенон. В магнитной системе применялись специальные Co-Sm магниты с точкой Кюри около 860 градусов Цельсия. Перед установкой в двигатель данные магниты проходили процедуру термостабилизации. Это необходимо для того, чтобы в процессе работы двигателя и нагрева магнитов не происходило изменения направления вектора намагниченности магнитов. Для того, чтобы не допустить нагрева магнитов выше их рабочей температуры, все магниты имели контакт с теплоотводящими медными элементами, которые отводили тепло на охлаждаемое основание.
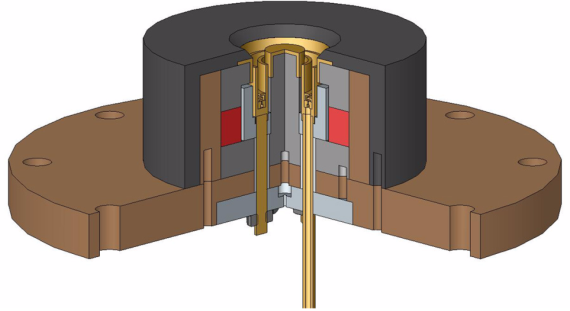
Рис. 9. Модель двигателя MHT-9
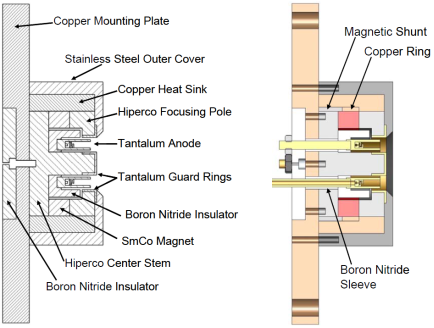
Рис. 10. Двигатель MHT-9 в разрезе
Магнитная система данного двигателя не имеет центральных элементов для создания магнитного поля. Магнитное поле создается кольцевыми магнитами на периферии и далее с помощью магнитопровода создается необходимая конфигурация и индукция поля в разрядном промежутке. Это также является важным моментом с точки зрения охлаждения магнитов. Их охватывает втулка, изготовленная из меди. А сама втулка находится в непосредственном контакте с медным основанием. Сечение магнитной системы и геометрия создаваемого ею поля представлены на рис. 11.
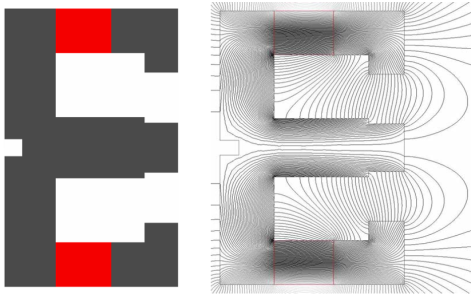
Рис. 11. Сечение магнитной системы двигателя MHT-9 и геометрия создаваемого поля
В зависимости от того, какой параметр двигателя (мощность, КПД, удельный импульс) являлся приоритетным при проведении испытаний, получались различные значения основных параметров двигателя (рис. 12).
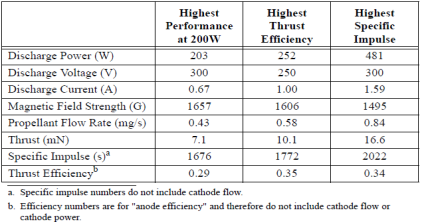
Рис. 12. Основные характеристики двигателя при разных режимах работы
Еще одним интересным и во многом уникальным является двигатель, разработанный в Стендфордском университете, США. Этот двигатель является самым маленьким из созданных холловских двигателей (рис. 13). Внешний диаметр канала составляет всего 4 мм, а ширина — 0,5 мм. При этом магнитное поле создается постоянным Co-Sm магнитом, а индукция поля в канале достигает величины 1 Тесла. При использовании ксенона была подтверждена работоспособность в диапазоне мощности от 10 до 40 Ватт. Тяга изменялась от 0,6 до 1,6 мН. В ходе проведения испытаний двигатель показал крайне низкую эффективность и невысокие значения удельного импульса, который изменялся в диапазоне от 300 до 850 секунд.
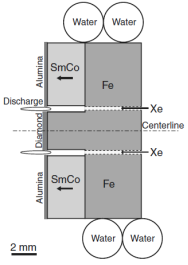
Рис. 13. Схема двигателя Micro-Hall Thruster
Заключение
Для удобного сравнения рассмотренных двигателей, их основные характеристики (мощность, тяга, удельный импульс, КПД) сведены в таблицу 2.
Таблица 2
Характеристики некоторых ЭРД на постоянных магнитах
| Двигатель | Мощность, W, [Вт] | Тяга, F, [Н] | Удельный импульс, Isp, [с] | КПД, 𝜂, [%] |
| CHTpm | 50–300 | – | – | – |
| TCHT-5 | 30–190 | 1,8–7,3 | 250–940 | |
| PHALL-1 | 1250 | 26,5–126 | – | |
| PHALL-2 | 500–1000 | 23–150 | 1500–2000 | 45–60 |
| PPI | – | 10 | – | – |
| MHT-9 | 20–516 (200)* | 7,1 | 1676 | – |
| Micro-Hall Thruster | 10–40 | 0,6–1,6 | 300–850 | |
| *- значение в скобках обозначает номинальную (расчетную) мощность двигателя. | ||||
Из таблицы следует, что при разработке электроракетных двигателей с магнитной системой, основанной на постоянных магнитах, удается достичь конкурентоспособных значений основных параметров. Однако данные двигатели являются еще только лабораторными образцами, для которых требуется проведение многочисленных испытаний и доработка конструкции, прежде чем можно будет говорить об их использовании в составе космических аппаратов.
Также необходимо помнить, что постоянные магниты и созданные на их основе магнитные системы двигателей могут иметь недостатки. К таким недостаткам можно отнести постоянное магнитное поле, влияние которого на аппаратуру космического аппарата сложно оценить без соответствующих испытаний. Еще одним недостатком таких конструкций является то, что постоянные магниты чувствительны к нагреву (падает коэрцитивная сила). Также необходимо не допускать нагрева магнитов до температур выше рабочих, так как они начинают размагничиваться и полностью размагничиваются при достижении точки Кюри. Соответственно, постоянные магниты и вся конструкция двигателя целиком требует хорошего охлаждения. Для постоянных магнитов также характерно, хоть и незначительное, но изменение направления вектора намагничивания с течением времени, что может отрицательно сказаться на симметрии магнитного поля двигателя и выдаваемых двигателем параметрах.
Суммируя вышесказанное, можно прийти к выводу, что создание электроракетных двигателей с магнитной системой, основанной на постоянных магнитах, является перспективным направлением. Проблемы при создании таких двигателей могут быть решены с использованием современных знаний и технологий.
Литература:Основные термины (генерируются автоматически): магнитная система, двигатель, PHALL, магнит, PPI, удельный импульс, магнитное поле, постоянная, малая мощность, необходимая конфигурация.
moluch.ru
Схема двигателя на эффекте Холла с протяжённой зоной ускорения Двигатель на эффекте Холла — разновидность ионного двигателя, в котором используется эффект Холла. При равных размерах с обычным ионным, холловский двигатель обладает большей тягой. Двигатели используются на космических аппаратах с 1972 года[1].
Холловский двигатель состоит из кольцевой камеры между анодом и катодом, вокруг которой расположены магниты. С одной стороны в камеру подаётся рабочее тело, с другой стороны происходит истекание плазмы. Нейтрализация положительного заряда плазмы производится электронами, эмитируемыми с катода.
По принципиальной схеме холловские двигатели делятся на двигатели с анодным слоем (ДАС) и с протяжённой зоной ускорения (СПД).
Между анодом и катодом обеспечивается разность потенциалов. В кольцевую камеру подаётся рабочее тело (например, ксенон). Разряд между анодом и катодом ионизирует рабочее тело. Под действием электростатического поля ионы разгоняются в осевом направлении. В радиальном направлении действует магнитная сила, которая в соответствии с эффектом Холла приводит к появлению тока в азимутальном направлении. Возникающая сила Лоренца ускоряет электроны, что создаёт дополнительную тягу. Движение электронов также устраняет ограничение по плотности тока, характерное для обычного ионного двигателя, и позволяет достичь относительно высоких значений расхода рабочего тела, и, как следствие, тяги двигателя[2][1].
Применение холловских двигателей в СССР началось в 1972 году[1]. Их серийное производство налажено в 1982 году[3]. Наиболее современным из этих двигателей является SPT-140, в 2017 году выведший на целевую орбиту спутник Eutelsat 172B[4].
В 2017 году на орбиту запущен спутник VENµS[en] с установленным на нём холловским двигателем нового поколения производства израильской компании «Рафаэль»[5].
ru-wiki.ru
Схема двигателя на эффекте Холла с протяжённой зоной ускорения Двигатель на эффекте Холла — разновидность ионного двигателя, в котором используется эффект Холла. При равных размерах с обычным ионным, холловский двигатель обладает большей тягой. Двигатели используются на космических аппаратах с 1972 года[1].
Холловский двигатель состоит из кольцевой камеры между анодом и катодом, вокруг которой расположены магниты. С одной стороны в камеру подаётся рабочее тело, с другой стороны происходит истекание плазмы. Нейтрализация положительного заряда плазмы производится электронами, эмитируемыми с катода.
По принципиальной схеме холловские двигатели делятся на двигатели с анодным слоем (ДАС) и с протяжённой зоной ускорения (СПД).
Между анодом и катодом обеспечивается разность потенциалов. В кольцевую камеру подаётся рабочее тело (например, ксенон). Разряд между анодом и катодом ионизирует рабочее тело. Под действием электростатического поля ионы разгоняются в осевом направлении. В радиальном направлении действует магнитная сила, которая в соответствии с эффектом Холла приводит к появлению тока в азимутальном направлении. Возникающая сила Лоренца ускоряет электроны, что создаёт дополнительную тягу. Движение электронов также устраняет ограничение по плотности тока, характерное для обычного ионного двигателя, и позволяет достичь относительно высоких значений расхода рабочего тела, и, как следствие, тяги двигателя[2][1].
Применение холловских двигателей в СССР началось в 1972 году[1]. Их серийное производство налажено в 1982 году[3]. Наиболее современным из этих двигателей является SPT-140, в 2017 году выведший на целевую орбиту спутник Eutelsat 172B[4].
В 2017 году на орбиту запущен спутник VENµS[en] с установленным на нём холловским двигателем нового поколения производства израильской компании «Рафаэль»[5].
ru-wiki.org
Схема двигателя на эффекте Холла с протяжённой зоной ускорения Двигатель на эффекте Холла — разновидность ионного двигателя, в котором используется эффект Холла. При равных размерах с обычным ионным, холловский двигатель обладает большей тягой. Двигатели используются на космических аппаратах с 1972 года[1].
Холловский двигатель состоит из кольцевой камеры между анодом и катодом, вокруг которой расположены магниты. С одной стороны в камеру подаётся рабочее тело, с другой стороны происходит истекание плазмы. Нейтрализация положительного заряда плазмы производится электронами, эмитируемыми с катода.
По принципиальной схеме холловские двигатели делятся на двигатели с анодным слоем (ДАС) и с протяжённой зоной ускорения (СПД).
Между анодом и катодом обеспечивается разность потенциалов. В кольцевую камеру подаётся рабочее тело (например, ксенон). Разряд между анодом и катодом ионизирует рабочее тело. Под действием электростатического поля ионы разгоняются в осевом направлении. В радиальном направлении действует магнитная сила, которая в соответствии с эффектом Холла приводит к появлению тока в азимутальном направлении. Возникающая сила Лоренца ускоряет электроны, что создаёт дополнительную тягу. Движение электронов также устраняет ограничение по плотности тока, характерное для обычного ионного двигателя, и позволяет достичь относительно высоких значений расхода рабочего тела, и, как следствие, тяги двигателя[2][1].
Применение холловских двигателей в СССР началось в 1972 году[1]. Их серийное производство налажено в 1982 году[3]. Наиболее современным из этих двигателей является SPT-140, в 2017 году выведший на целевую орбиту спутник Eutelsat 172B[4].
В 2017 году на орбиту запущен спутник VENµS[en] с установленным на нём холловским двигателем нового поколения производства израильской компании «Рафаэль»[5].
wikiredia.ru









