Содержание
устройство, принцип работы, типы, управление
Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита. На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока. Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество. То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов. С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
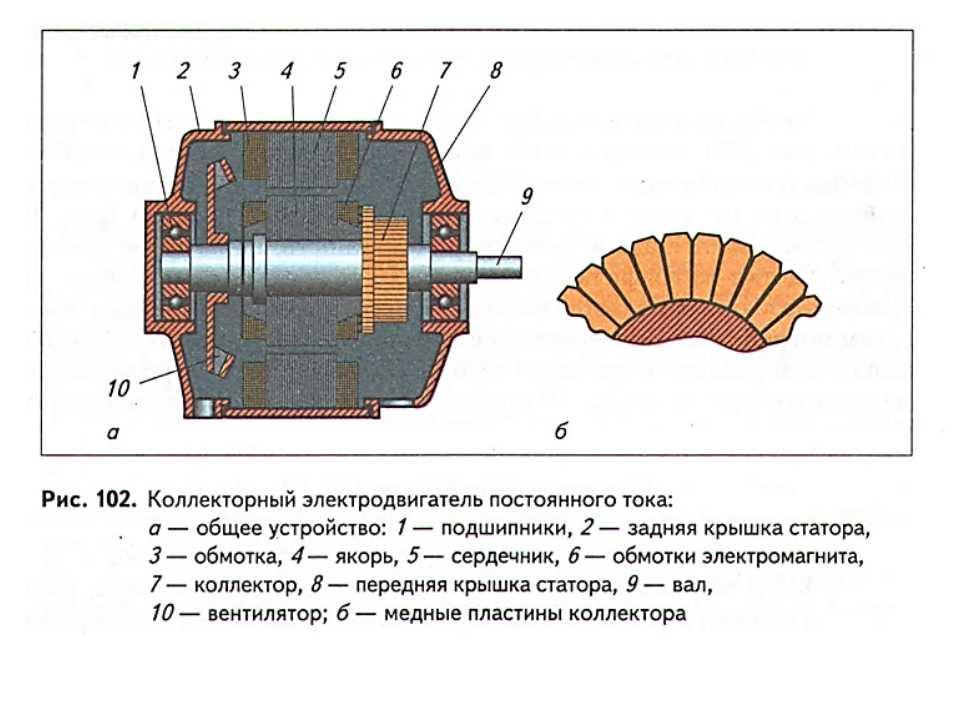
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
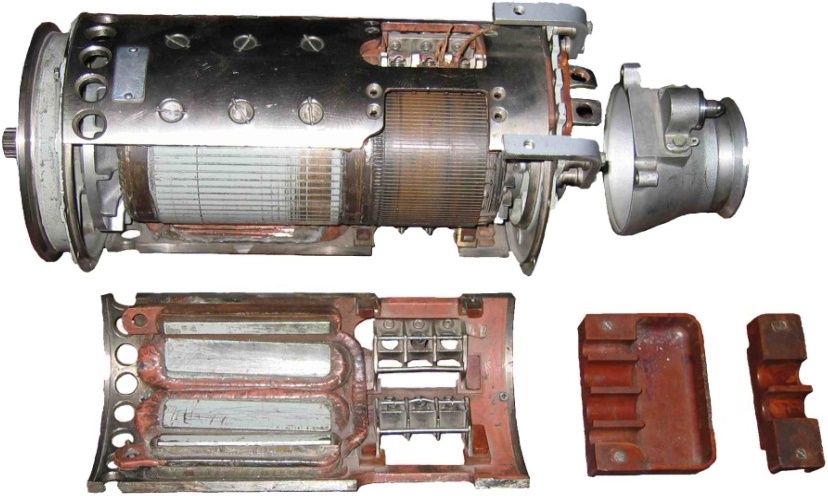
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
Рисунок 3. Ротор с тремя обмоткамиРисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение.
Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
 Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора. В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится.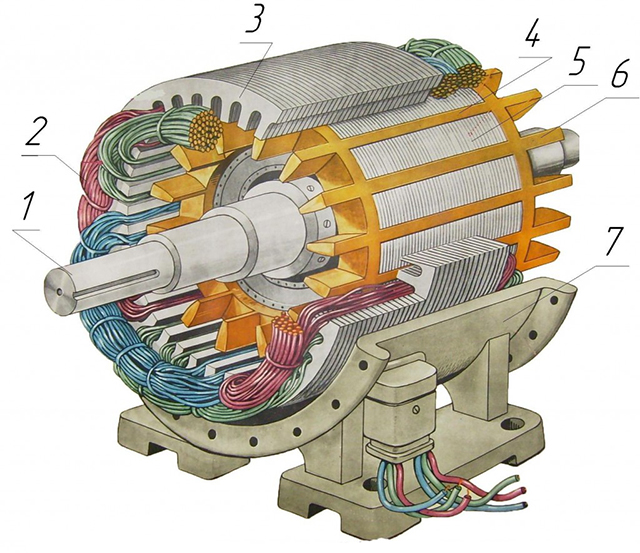 Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
Примеры механических характеристик ДПТ независимого возбуждения
Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.
Пример регулировочных характеристик двигателя с якорным управлением
Благодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Области применения
Перечислять все области применения электродвигателей можно бесконечно долго. Для примера назовём лишь несколько из них:
- бытовые и промышленные электроинструменты;
- автомобилестроение – стеклоподъёмники, вентиляторы и другая автоматика;
- трамваи, троллейбусы, электрокары, подъёмные краны и другие механизмы, для которых важны высокие параметры тяговых характеристик.
Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.

У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.
Видео в дополнение к написанному
 youtube.com/embed/1N2xPGI-zJs?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
youtube.com/embed/1N2xPGI-zJs?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
Электродвигатель постоянного тока
- Постоянная момента
- Постоянная ЭДС
- Постоянная электродвигателя
- Жесткость механической характеристики
- Напряжение электродвигателя
- Мощность электродвигателя постоянного тока
- Механическая постоянная времени
Постоянная момента
,
- где M — момент электродвигателя, Нм,
- – постоянная момента, Н∙м/А,
- I — сила тока, А
Постоянная ЭДС
Направление ЭДС определяется по правилу правой руки. Направление наводимой ЭДС противоположно направлению протекающего в проводнике тока.
Направление наводимой ЭДС противоположно направлению протекающего в проводнике тока.
Наведенная ЭДС последовательно изменяется по направлению из-за перемещения проводников в магнитном поле. Суммарная ЭДС, равная сумме ЭДС в каждой катушке, прикладывается к внешним выводам двигателя. Это и есть противо-ЭДС. Направление противо-ЭДС противоположно приложенному к двигателю напряжению. Значение противо-ЭДС пропорционально частоте вращения и определяется из следующего выражения: [1]
,
- где — электродвижущая сила, В,
- – постоянная ЭДС, В∙с/рад,
- — угловая частота, рад/с
Постоянные момента и ЭДС в точности равны между собой KT = KE. Постоянные KT и KE равны друг другу, если они определены в единой системе едениц.
Постоянная электродвигателя
Одним из основных параметров электродвигателя постоянного тока является постоянная электродвигателя Kм. Постоянная электродвигателя определяет способность электродвигателя преобразовывать электрическую энергию в механическую.
,
- где — постоянная электродвигателя, Нм/√Вт,
- R — сопротивление обмоток, Ом,
- – максимальный момент, Нм,
- — мощность потребляемая при максимальном моменте, Вт
Справка: Постоянная электродвигателя вместе с размерами электродвигателя являются основными параметрами для инженера при выборе электродвигателя с лучшим соотношением мощность / объем.
Постоянная электродвигателя не зависит от соединения обмоток, при условии, что используется один и тот же материал проводника. Например, обмотка двигателя с 6 ветками и 2 параллельными проводами вместо 12 одиночных проводов удвоят постоянную ЭДС, при этом постоянная электродвигателя останется не изменой.
Жесткость механической характеристики двигателя
,
- где — жесткость механической характеристики электродвигателя постоянного тока
Напряжение электродвигателя
Уравнение баланса напряжений на зажимах двигателя постоянного тока имеет вид (в случае коллекторного двигателя не учитывается падение напряжения в щеточно-коллекторном узле):
,
- где U — напряжение, В.
Уравнение напряжения выраженное через момент двигателя будет выглядеть следующим образом:
Соотношение между моментом и частотой вращения при двух различных напряжениях питания двигателя постоянного тока неизменно. При увеличении частоты вращения момент линейно уменьшается. Наклон этой функции KTKE/R постоянный и не зависит от значения напряжения питания и частоты вращения двигателя.
Благодаря таким характеристикам упрощается управление частотой вращения и углом поворота двигателей постоянного тока. Это характерно для коллекторных и вентильных двигателей постоянного тока, что нельзя сказать о двигателях переменного тока и шаговых двигателях [1].
Мощность электродвигателя постоянного тока
Упрощенная модель электродвигателя выглядит следующим образом:
- где I – сила тока, А
- U — напряжение, В,
- M — момент электродвигателя, Н∙м
- R — сопротивление токопроводящих элементов, Ом,
- L — индуктивность, Гн,
- Pэл — электрическая мощность (подведенная), Вт
- Pмех — механическая мощность (полезная), Вт
- Pтеп — тепловые потери, Вт
- Pинд — мощность затрачиваемая на заряд катушки индуктивности, Вт
- Pтр — потери на трение, Вт
Механическая постоянная времени
Механическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое частота вращения ненагруженного электродвигателя достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
- где — механическая постоянная времени, с
Смотрите также
Основные параметры электродвигателя
Общие параметры для всех электродвигателей
- Момент электродвигателя
- Мощность электродвигателя
- Коэффициент полезного действия
- Номинальная частота вращения
- Момент инерции ротора
- Номинальное напряжение
- Электрическая постоянная времени
- Т.Кенио, С.Нагамори. Двигатели постоянного тока с постоянными магнитами: Пер. с англ.-М.: Энергоатомиздат, 1989.
Библиографический список
Электродвигатели постоянного тока серии П-11, П-12
Купить Электродвигатели постоянного тока серии П-11, П-12
Электродвигатели постоянного тока
серии П 1 предназначены для длительного режима работы в электроприводах постоянного тока в условиях умеренного, морского и тропического климата. Электрические машины изготавливаются с самовозбуждением.
Электрические машины изготавливаются с самовозбуждением.
Электрические машины П11М, П12М, имеют исполнение оболочки по степени защищенности IP23; машины ПБ11М, ПБ12М – IP54
Электродвигатель постоянного тока П1: условия эксплуатации
Электродвигатели постоянного тока П1
рассчитаны для работы при температуре окружающего воздуха от минус 40ºC до плюс 40ºC. Относительная влажность окружающего воздуха 95±3% при температуре 20º±5ºC. Вибрация, ударные сотрясения, длительные наклоныоси машины от 45º в любую сторону и при качке до 45º с периодом качки 7-9 с.Возбуждение электродвигателей постоянного тока П1
независимое, смешанное, параллельное, последовательное.Изоляция электродвигателей постоянного тока П1
класса нагревостойкости В по ГОСТ 8865-87.Общий уровень интенсивности воздушного шума и уровня составляющих спектра вибрации электродвигателей постоянного тока П1
соответствуют утвержденным нормам.Электродвигатели постоянного тока П1
выдерживают перегрузку по току:
- 2 Iн в течении 1 мин. – стабильное напряжение;
- 1,5 Iн в течение 2 мин. – меняющееся напряжение;
- 4 Iн в течение 20 с.
 – стабильное напряжение;
– стабильное напряжение;Номинальный режим работы электродвигателей постоянного тока
— продолжительный (SI по ГОСТ 183-74).Электродвигатели постоянного тока П1
допускают работу в режимах:
- кратковременном – S2
- повторно-кратковременном – S3
Основные параметры электродвигателей постоянного тока серии П1
| Тип дви- гателя | U=50 B | U=75 B | U=110 B | U=220 B | ||||||||
| N, кВт | I, A | n, об/мин | N, кВт | I, А | n, об/мин | N, кВт | I, А | n, об/мин | N, кВт | I, А | n, об/мин | |
| П11М | 0,50 0,25 | 14,50 6,85 | 2800 1500 | 0,20 0,50 0,20 | 4,20 9,90 4,20 | 1740 2800 1950 | 0,14 0,29 0,66 | 2,04 4,05 8,20 | 1000 1500 3000 | 0,14 0,29 0,66 | 1,10 2,04 4,11 | 1000 1500 3000 |
| ПБ11M | 0,15 0,33 | 2,00 3,80 | 1500 3000 | 0,15 0,33 | 1,00 1,90 | 1500 3000 | ||||||
Габаритные и установочно-присоединительные размеры электродвигателей постоянного тока серии П1
| Тип машины | Размеры в мм | Масса в кг | |||||||||||||||||||||||
| L1 | L2 | L10 | L11 | L30 | L33 | h | h2 | h3 | h5 | h6 | h20 | h40 | h41 | b1 | b2 | b10 | b11 | d1 | d2 | d10 | d20 | d22 | d30 | ||
| П11М | 40 | — | 130 | 155 | 372 | — | 112 | 6 | 4 | 20,5 | 13,5 | 11 | 210 | — | 6 | 4 | 145 | 180 | 18 | 12 | 9 | 130 | М10 | 196 | 18,5 |
| ПБ11М | 30 | — | 399 | ||||||||||||||||||||||
| ПБ11М | — | — | — | 372 | — | 204 | 17 | ||||||||||||||||||
| П12М | — | 155 | 180 | 397 | — | 210 | 23,5 | ||||||||||||||||||
| ПБ12М | 30 | — | 424 | ||||||||||||||||||||||
| ПБ12М | — | — | — | 397 | — | 204 | 21,8 | ||||||||||||||||||
| П11М | 372 | 223 | 17 | ||||||||||||||||||||||
| П12М | 397 | 21,8 | |||||||||||||||||||||||
Информация относится к следующим наименованиям каталога
| Наименование | Ед. изм. изм. | Цена с НДС, р. | |
| Электродвигатель 0,2 кВт 1740 об П11М 75 V IM1001 возбуждение параллельное | шт | 18 600,00 | |
| Электродвигатель 0,2 кВт 1740 об П11М 75 В IM2101 возбуждение параллельное | шт | 20 100,00 | |
| Электродвигатель 0,29 кВт 1500 об П11М 110 В IM1001 возбуждение смешанное | шт | 31 200,00 | |
| Электродвигатель 0,29 кВт 1500 об П11М 110 В IM2101 возбуждение смешанное | шт | 31 200,00 | |
| Электродвигатель 0,29 кВт 1500 об П11М 220 В IM1001 возбуждение смешанное | шт | 31 200,00 | |
| Электродвигатель 0,29 кВт 1500 об П11М 220 В IM1002 возбуждение смешанное | шт | 31 200,00 | |
| Электродвигатель 0,29 кВт 1500 об П11М 220 В IM2101 возбуждение смешанное | шт | 42 000,00 | |
| Электродвигатель 0,29 кВт 1500 об П11М 220 В IM2102 возбуждение смешанное | шт | 31 200,00 | |
| Электродвигатель 0,3 кВт 1500 об П11 У2 220 В IM2101 | шт | 31 200,00 | |
| Электродвигатель 0,44 кВт 1500 об П12М 110 В IM1001 возбуждение смешанное | шт | 36 000,00 | |
| Электродвигатель 0,44 кВт 1500 об П12М 110 В IM2101 возбуждение смешанное | шт | 36 000,00 | |
| Электродвигатель 0,44 кВт 1500 об П12М 220 В IM1001 возбуждение смешанное | шт | 36 000,00 | |
| Электродвигатель 0,44 кВт 1500 об П12М 220 В IM2101 возбуждение смешанное | шт | 48 000,00 | |
| Электродвигатель 0,45 кВт 1500 об П12 220 В IM2101 возбуждение смешанное | шт | 21 200,00 | |
| Электродвигатель 0,45 кВт 1500 об П12 220/220 В IM2101 возбуждение независимое | шт | 21 200,00 | |
| Электродвигатель 0,5 кВт 2800 об П11М 50 В IM1001 возбуждение смешанное | шт | 40 000,00 | |
| Электродвигатель 0,5 кВт 2800 об П11М 50 В IM2101 возбуждение смешанное | шт | 40 000,00 | |
| Электродвигатель 0,5 кВт 2800 об П11М 75 В IM1001 | шт | 27 640,00 | |
| Электродвигатель 0,5 кВт 2800 об П11М 75 В IM2101 | шт | 27 640,00 | |
| Электродвигатель 0,56 кВт 2800 об П11М 220 В IM2101 возбуждение смешанное | шт | 36 000,00 | |
| Электродвигатель 0,66 кВт 3000 об П11М 110 В IM1001 возбуждение смешанное | шт | 21 200,00 | |
| Электродвигатель 0,66 кВт 3000 об П11М 110 В IM2101 возбуждение смешанное | шт | 42 000,00 | |
| Электродвигатель 0,66 кВт 3000 об П11М 220 В IM1001 возбуждение смешанное | шт | 42 000,00 | |
| Электродвигатель 0,66 кВт 3000 об П11М 220 В IM2101 возбуждение смешанное | шт | 42 000,00 | |
| Электродвигатель 0,7 кВт 3000 об П11 220 В IM1001 возбуждение смешанное | шт | 38 400,00 | |
| Электродвигатель 0,7 кВт 3000 об П11 220 В IM2101 возбуждение смешанное | шт | 38 400,00 | |
| Электродвигатель 0,7 кВт 3000/3450 об П11 220/110 В IM2101 | шт | 19 600,00 | |
| Электродвигатель 0,95 кВт 2800 об П12М 220 В IM2101 возбуждение смешанное | шт | 31 200,00 | |
| Электродвигатель 0,95 кВт 2800 об П12М 220/220 В IM1001(присоединительные размеры МИ-32) | шт | 61 440,00 | |
| Электродвигатель 0,95 кВт 3000 об П12М 110 В IM1001 возбуждение смешанное | шт | 19 600,00 | |
| Электродвигатель 0,95 кВт 3000 об П12М 220 В IM1001 возбуждение смешанное | шт | 19 600,00 | |
| Электродвигатель 0,95 кВт 3000 об П12М 220 В IM2101 возбуждение смешанное | шт | 19 600,00 | |
| Электродвигатель 1,0 кВт 3000 об П12 220 В IM1001 | шт | 19 600,00 | |
| Электродвигатель 1,0 кВт 3000 об П12 220 В IM2101 | шт | 19 600,00 | |
| Электродвигатель 1,0 кВт 3000 об П12 220 В IM3601 | шт | 19 600,00 | |
| Электродвигатель 1,0 кВт 3000 об П12 УХЛ4 220/220 В IM3601 | шт | 19 600,00 | |
Электродвигатель 1,0 кВт/0,6 кВт/0,55 кВт П11М72 ОМ5 с приемкой ОТК без магн. пускателя пускателя | шт | 230 000,00 | |
| Наименование | Ед. изм. | Цена с НДС, р. |
Электродвигатель постоянного тока движений подачи МТ МТА МТВ
Данные высокомементные электродвигатели предназначены для металлообрабатывающих станков с ЧПУ, роботов, трансманипуляторов и др. Типовое обозначение деталей формируется: З — Условное обозначение момента, М — мотор, Т — серия, А — модификация по моменту, С — электромагнитный тормоз, Р — резольвер с мультипликатором, К — фотоэлектрический растерный преобразователь (пульс — кодер). Если в обозначении двигателя присутствует цифра 2,5 — значит передающее число мультипликатора — 1:2,5. Если в обозначении отсутствует буквы С,Р или К, значит нет встроенного тормзоза, резольвера или пульс — кодера (ФРП).
Руководство MT (pdf)
Условия работы
Электродвигатели предназначены для работы в следующих условиях:
- температура окружающей среды: +5С — +40С;
- высота уровня моря: до 1000м;
- относительная влажность: до 80% при 30С.

Окружающая среда должна быть взрывобезопасной. Не должно быть токопроводящей пыли, агрессивных газов и паров с концентрацией, разрушающей металлы и изоляцию.
Описание комплекта электродвигателя
Комплект электродвигателей состоит из машины постоянного тока с встроенным температурным датчиком:
- датчика частот вращения (тахогенератора)
- электромагнитного тормоза без зазора;
- датчика углового положения вала типа резольвера или пульскодера
Технические параметры электродвигателей
| Тип | 1МТ /1МТ-С/ | 2МТА /2МТА-С/ | 3МТА /3МТА-С/ | 4МТА /4МТА-С/ | 4МТБ /4МТБ-С/ | 5МТ /5МТ-С/ | |
| Мg0 | Нм | 7* | 13 | 21 | 23 | 30 | 47 |
| Mmax | Нм | 50 | 80 | 110 | 120 | 170 | 190 |
| nmax | мин-1 | 1500 | 1500 | 1500 | 1500 | 1500 | 1500 |
| J | кг. м2 м2 | 0.0150 /0.0178/ | 0.0190 /0.0223/ | 0.0260 /0.0290/ | 0.0290 /0.0318/ | 0.0366 /0.0416/ | 0.0366 /0.0416/ |
| Umax | В | 70 | 100 | 140 | 170 | 190 | 190 |
| Ig0 | а | 26 | 26 | 30 | 26 | 28 | 48 |
| Вес | кг | 26 | 30 | 33 | 36 | 40 | 44 |
| Тормоз Мт | Нм | 13 | 13 | 13 | 13 | 24 | 24 |
| Тормоз Iт | а | 1.1 | 1.1 | 1.1 | 1.1 | 1.3 | 1.3 |
| Рекомендуем. преобразователь | 4АЕВ16 3РЕВ16 | 4AEB16 3PEB16 | 4AEB16 3PEB16 | 4AEB16 3PEB16 | 4AEB16 3PEB16 | 8AEB16 5PEB16 |
* Нм в режим S2 — 120 min
Если встроить электромагнитный тормоз, то вес всех двигателей, указанных в таблице увеличивается как следует:
- для типа 1МТ-С, 2МТА-С, 3МТА-С, 4МТА-С на 3,6 кг;
- для типа 4МТВ-С и 5МТ-С на 6,0 кг.
Если встроить датчик углового положения вала, то вес двигателей увеличивается как следует: — для типа «Резольвер» на 0,5 кг; — для типа «Пульс — кодер» на 1,2 кг.
Для решения проблем, возникающих при эксплуатации станков с ЧПУ либо трансманипуляторов или роботов, мы предлагаем вам приобрести у нас электроприводы постоянного тока или электроприводы станков для главного движения или для привода подачи.
Разработанные и выпускаемые болгарским брендом «Артех» (ARTECH) на заводах, оснащенных самым современным и высокоточным оборудованием от лучших мировых производителей, электроприводы станков соответствуют ГОСТам и сертифицированы для использования в промышленности и сельском хозяйстве.
У нас вы найдете электродвигатели серии МР для главных приводов металлообрабатывающих станков, сконструированные и произведенные с учетом новейших тенденций в этой области.
Характерные особенности электропривода постоянного тока серии МР: вынужденное охлаждение, встроенный датчик тепловой защиты, шихтовый магнитопровод, тепловой класс изоляции «F» или «H», встроенный тахогенератор; выбор охлаждения, как и модификации монтажа осуществляется по выбору клиента. Скорость вращения, уровень шума и уровень вибрации тоже варьируется исходя из требований клиента. Следует отметить, что тип охлаждения, монтажные размеры и уровень вибрации соответствуют требованиям IEC.
Скорость вращения, уровень шума и уровень вибрации тоже варьируется исходя из требований клиента. Следует отметить, что тип охлаждения, монтажные размеры и уровень вибрации соответствуют требованиям IEC.
Электроприводы постоянного тока серии МР могут поставляться мощностью от 3,7 кВ до 70 кВ и массой от 86 до 764 кг.
Всегда в наличии также и электроприводы постоянного тока для привода подачи серий МТ, МТА и МТВ различных модификаций. Электродвигатели электроприводов постоянного тока предназначаются для работы в следующих условиях: относительная влажность помещения до 80% при 30о С, температура окружающей среды от +5 до +40о С, высота над уровнем моря до 1000м. В окружающей среде не должно быть агрессивных газов и паров, токопроводящей пыли.
Редукторы, мотор-редукторы: ООО «Приводные технологии»
+7 (495) 369- 04- 89
+7 (910) 726- 725- 4
+375 (17) 272- 04- 08
+375 (29) 61- 787- 61
[email protected]
Редукторы, мотор-редукторы, редукторные механизмы:
червячные редукторы, цилиндрические редукторы, конические редукторы,
планетарные редукторы. Бытовая и промышленная приводная техника:
Бытовая и промышленная приводная техника:
мини редукторы, электродвигатели, двигатели постоянного тока, DC моторы,
шаговые двигатели, устройства плавного пуска, частотные преобразователи.
Вариаторы, мотор-барабаны, редукторы для смесителей, сервоприводы.
| о компании | |||||||||
Приводные Технологии — развивающаяся компания малого бизнеса, основным видом деятельности которой является производство, маркетинг и промоушинг, бытовой и промышленной, доступной и надежной приводной техники. Интеграция новейших технологий современного редукторостроения к отечественным условиям производства, — особенность наших технических решений, предлагаемых рынку. Современные запросы приводов стали более требовательны к механической передаточной части, к подводимому электрическому оборудованию, к последующим приводным муфтам и др. Наши предложения редукторных мини-моторов, редукторных узлов и силовых передаточных машин предназначены для эксплуатации в разных отраслях, для достижения различных целей, с любым набором требований и т. | |||||||||
|
| ||||||||
 д. Помимо всего этого, имеется широкий выбор электрических устройств для оперативного контроля и регулирования режимов работы привода, — так называемая, область приводной электроники. подробнее
д. Помимо всего этого, имеется широкий выбор электрических устройств для оперативного контроля и регулирования режимов работы привода, — так называемая, область приводной электроники. подробнее Представляем продукцию одного из … подробнее
Представляем продукцию одного из … подробнее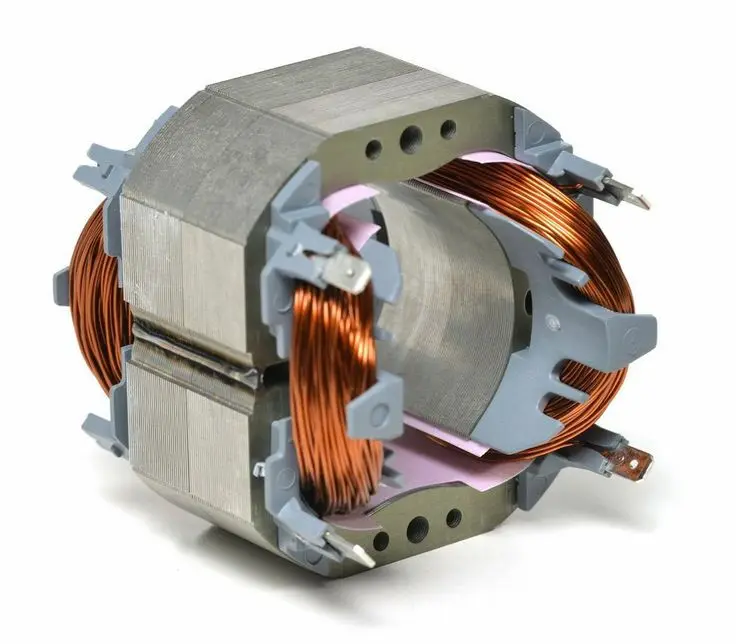 .. 90 об/мин
.. 90 об/мин 5T
5T* Копирование информации с сайта запрещено законом об авторском праве.
© 2022
Приводные технологии
Российская Федерация
+7 (495) 369-04-89
+7 (910) 726-725-4 (МТС) Смоленск
Республика Беларусь
+375 17 272-04-08 (т/ф) Минск
+375 29 61-787-61 (Velcom) Минск
tech-privod.com
Сайт работает на платформе Nestorclub.com
электродвигатель постоянного тока 24 вольт 2квт | Маркет
Описание товара
Здравствуйте! Вы попали на доску объявлений. Сотрудники Promelectrica.com разместили тут товары, которые Вам могут быть интересны. Информация о наличии по телефону (495)640-04-53
Сотрудники Promelectrica.com разместили тут товары, которые Вам могут быть интересны. Информация о наличии по телефону (495)640-04-53
Коллекторный электродвигатель постоянного тока с электромагнитным возбуждением Д-16Б предназначен для привода специального механизма, а также может быть использован в различных областях техники.
Структура условного обозначения
Д-16Б:
Д — двигатель;
16 — порядковый номер разработки;
Б — модификация исполнения двигателя.
Условия эксплуатации
Температура окружающего воздуха при эксплуатации от минус 60 до 50°С. Пониженное атмосферное давление однократно в течение 5 мин при номинальном вращающем моменте — не ниже 667 Па (5 мм рт.ст).
Верхнее значение относительной влажности воздуха в течение 48ч — 98% при температуре (35±5)°С.
Электродвигатель стоек к воздействию:
Вибрационных нагрузок с диапазоном частот от 5 до 35 Гц и амплитудой не более 1 мм в течение 3 мин.
Вибрационных нагрузок с диапазоном частот от 35 до 2000 Гц и ускорением от 39,2 до 147,2 мс-2 (от 4 до 15 g) в течение 23 мин.
Линейных (центробежных) нагрузок с ускорением 98,1 мс-2 (10 g) в течение 5 мин.
Механические нагрузки воздействуют на места крепления двигателя в любом направлении.
Двигатель выдерживает воздействие:
Вибрационных нагрузок с частотой вибрации от 10 до 2000 Гц и ускорением, действующим вдоль и перпендикулярно оси двигателя, от 20 до 40 мс-2 (от 2 до 4 g) в течение 46 ч в обесточенном состоянии и 2,8 ч при электрической нагрузке.
Ударных многократных нагрузок с ускорением 50 мс-2 (5 g) при количестве ударов 5000 с частотой от 40 до 100 ударов в час и длительностью удара от 5 до 10 мс.
Номинальный режим работы двигателя кратковременный при напряжении питания 27 В:
15 мин при вращающем моменте 1,47 Нм.
5 мин при вращающем моменте 1,76 Нм.
1 с при вращающем моменте 3,43 Нм.
Конструктивное исполнение по способу монтажа в соответствии с ГОСТ 2479-79 IМ3081.
Направление вращения вала левое со стороны выхода вала.
Сопротивление изоляции электрических цепей относительно корпуса двигателя в нормальных климатических условиях при практически холодном состоянии двигателя до ввода в эксплуатацию — не менее 20 МОм.
В течение срока службы и минимальной наработки сопротивление изоляции при практически холодном состоянии двигателя — не менее 1 МОм.
Изоляция электрических цепей относительно корпуса двигателя в нормальных климатических условиях выдерживает без пробоя и перекрытия воздействие испытательного напряжения 500 В (действующее значение) переменного тока частотой 50 Гц.
Степень искрения на коллекторе двигателя при номинальном вращающем моменте и номинальном напряжении питания в нормальных климатических условиях не превышает 2 по ГОСТ 183-74.
Двигатель соответствует требованиям технических условий ОДС.515.151 и комплекта конструкторской документации согласно 1ДС.599.112 СД.
Условия транспортирования двигателя в упаковке предприятия-изготовителя в части воздействия механических факторов соответствуют условиям Л по ГОСТ 23216-78; в части воздействия климатических факторов внешней среды — таким же, как условия хранения 5 по ГОСТ 15150 — 69.
Условия хранения двигателя соответствуют условиям I (отапливаемое хранилище), условиям 3 (неотапливаемое хранилище) и условиям 5 (навесы в макроклиматических районах с умеренным и холодным климатом) по ГОСТ 15150-69.
Эксплуатацию двигателей следует проводить в соответствии с техническим описанием и инструкцией по эксплуатации 1ДС.599.112 ТО.
В процессе хранения двигатель, вмонтированный в аппаратуру изделия, должен подвергаться проверке на функционирование не реже одного раза в год.
При проверке на функционирование двигатель работает при напряжении питания 27 В на холостом ходу или при номинальном вращающем моменте в течение одной минуты.
Изготовитель гарантирует качество двигателя при соблюдении режимов работы и условий эксплуатации. ОДС.515.151
Технические характеристики
Номинальное напряжение питания, В — 27 Номинальный вращающий момент, Нм — 1,76 Номинальная частота вращения, мин-1 — 8000 Потребляемый ток при номинальном вращающем моменте, А, не более — 78 Потребляемый ток при холостом ходе, А, не более — 17 Частота вращения при холостом ходе, мин-1, не более — 10900 КПД, % — 70 Момент инерции якоря, кгм2 — 8,310-4 Масса двигателя, кг, не более — 7
Двигатель в течение 5 мин допускает работу при номинальном вращающем моменте и напряжении питания, лежащем в пределах от 22 до 30 В. При этом в нормальных климатических условиях: частота вращения изменяется в пределах от 6100 до 9000 мин-1; потребляемый ток — не более 88 А.
При этом в нормальных климатических условиях: частота вращения изменяется в пределах от 6100 до 9000 мин-1; потребляемый ток — не более 88 А.
Двигатель в течение 5 мин работы в выше указанном режиме допускает в течение 30 с работу при вращающем моменте 3,43 Нм. Параметры двигателя при этом не оговариваются.
Двигатель в течение 10 мин допускает работу при вращающем моменте 0,49 Нм, температуре 50°С и напряжении питания, лежащем в пределах от 22 до 30 В с последующей работой при пониженном атмосферном давлении; в течение 20 мин в нормальных климатических условиях с последующим охлаждением.
Частота вращения после работы в указанном режиме с последующим охлаждением и при последующей работе в течение 5 мин при номинальном вращающем моменте и напряжении питания 27 В — не менее 7000 мин-1.
Потребляемый ток в этих же условиях — не более 84 А.
Напряжение трогания при нижнем значении температуры и вращающем моменте 1,47 Нм — не более 8 В.
Напряжение трогания в нормальных климатических условиях при холостом ходе — не более 7 В.
Минимальная наработка двигателя при номинальном напряжении питания 60 ч, в том числе:
20 ч непрерывно при вращающем моменте 0,98 Нм;
40 ч в номинальном режиме, из них 6 ч при верхнем значении температуры и 6 ч при нижнем значении температуры.
Перерыв между включениями двигателя до полного охлаждения.
Минимальный срок службы двигателя — 10,5 лет.
Минимальный срок сохраняемости двигателя в отапливаемом хранилище — 10,5 лет, в том числе:
не более 1 года в упаковке предприятия-изготовителя;
не более 10,5 лет вмонтированным в аппаратуру изделия.
В пределах срока сохраняемости допускается хранение двигателя вмонтированным в аппаратуру защищенного изделия:
не более 5 лет в неотапливаемом хранилище;
не более 1 года под навесом.
Гарантийная наработка в пределах гарантийного срока эксплуатации — 60 ч.
Гарантийный срок эксплуатации — 10,5 лет.
Гарантийный срок хранения — 10,5 лет.
Точную информацию о товарах, ценах и наличии вы можете получить по запросу через электронную почту. Выставленный счет-договор является единственным информационным обязательством, все другие сведения могут содержать неточности. Мы затрачиваем все возможные силы для улучшения сервиса и благодарны тысячам юридических и частных лиц, воспользовавшимся нашими услугами, и сотням постоянных клиентов, которые продолжают с нами работать.
Выставленный счет-договор является единственным информационным обязательством, все другие сведения могут содержать неточности. Мы затрачиваем все возможные силы для улучшения сервиса и благодарны тысячам юридических и частных лиц, воспользовавшимся нашими услугами, и сотням постоянных клиентов, которые продолжают с нами работать.
Каталог:
- Выключатели, концевики, джойстики
- Бесконтактные датчики
- Реле, контакторы, автоматы
- Маячки, колонны, сирены
- Приводная техника
- Разъемы и кабели
- Трансформаторы, источники питания
- Энкодеры, муфты
- Автоматизация и измерение
- Тиристоры, диоды, предохранители
Видео «Как добраться»:
Информация о технических характеристиках, комплекте поставки, стране изготовления, внешнем виде и цвете товара носит справочный характер и основывается на последних доступных к моменту публикации сведениях от продавца.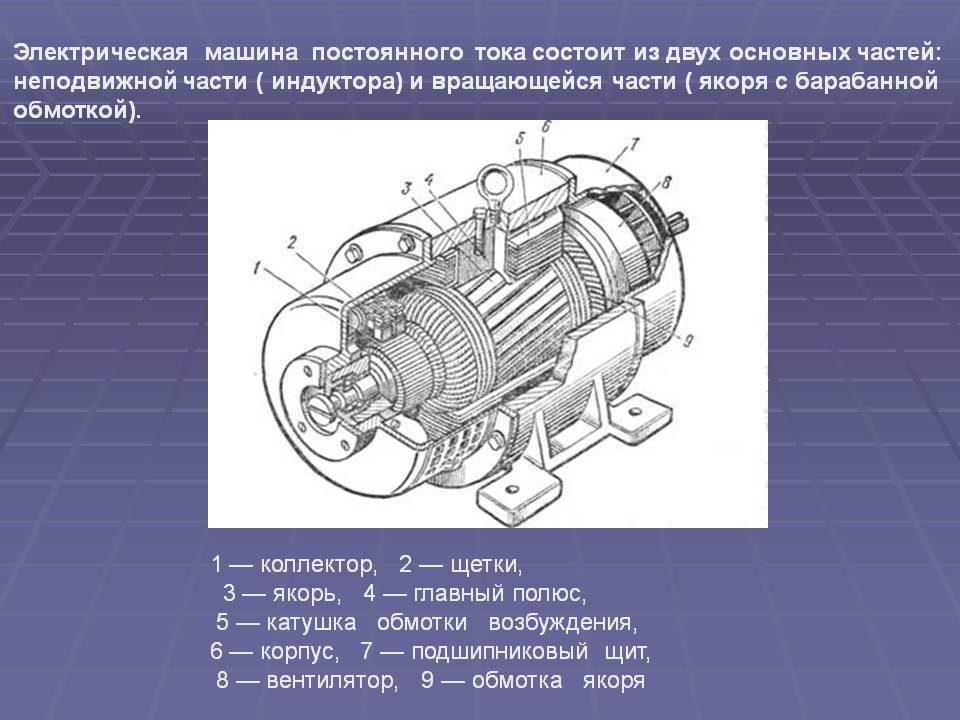
Товарное предложение №14961084773 обновлено 28 сентября 2022 г. в 08:14.
Motores de corriente continua de maxima calidad maxon
Los motores maxon IDX se component de un motor basado en la technología EC-i, un encoder absoluto magnetico (monovuelta) y de una electronica de control de position EPOS4 con control integrado de campo orientado (ФОК). La calidad de su diseño cumple los requisitos de la protección IP 65, el cliente únicamente tiene que impermeabilizar el eje de salida. Лос Sensores де температуры integrados у dispuestos ан эль bobinado у ан ла электроника де контроля де posición се evalúan directamente эн эль мотор, ло дие позвольте ип aprovechamiento óptimo де лос rangos де funcionamiento.
El DCX 6 se ofrece como minimotor con rodamientos de bolas precargados o con cojinetes sinterizados. El supresor де chispas opcional (CLL) convierte este motor de CC con escobillas de metal благородный ан ип auténtico corredor de fundo.
El DCX 8 se ofrece como minimotor con rodamientos de bolas precargados o con cojinetes sinterizados. El supresor де chispas opcional (CLL) convierte este motor de CC con escobillas de metal благородный ан ип auténtico corredor de fundo.
El supresor де chispas opcional (CLL) convierte este motor de CC con escobillas de metal благородный ан ип auténtico corredor de fundo.
El DCX 10 se ofrece como minimotor con rodamientos de bolas precargados o con cojinetes sinterizados. El supresor де chispas opcional (CLL) convierte este motor de CC con escobillas de metal благородный ан ип auténtico corredor de fundo.
El DCX 12 está disponible como minimotor con rodamientos de bolas pretensados o con cojinetes sinterizados. El supresor де chispas (CLL) опционально convierte este двигатель постоянного тока с escobillas де металла precioso ан ип auténtico corredor де фондо.
El DCX 14 является доступным для минимоторов с родамиентос де болас precargados или с cojinetes sinterizados. El Supresor де chispas (CLL) convierte este двигатель постоянного тока с escobillas де металла precioso ан ип auténtico corredor де фондо.
El DCX 16 es una verdadera maravilla de configuración. Sus cojinetes sinterizados o los rodamientos de bolas precargados, las escobillas de grafito o metal благородный, CLL опциональный, и т. д., разрешенный su empleo en un amplio campo de aplicaciones.
д., разрешенный su empleo en un amplio campo de aplicaciones.
El DCX 19 является вердадера maravilla де configuración. Sus cojinetes sinterizados o los rodamientos de bolas precargados, las escobillas de grafito o metal precioso, con CLL и т. д., разрешенные su empleo en un amplio campo de aplicaciones.
Los motores DCX de maxon son configurables y pueden ser pedidos por el propio cliente según sus requisitos.
El DCX 26 es pure potencia. Sus cojinetes sinterizados o los rodamientos de bolas precargados, las escobillas de grafito o metal precioso con CLL Allowen su empleo en un amplio campo de aplicaciones.
El DCX 32 es un grupo de potencia con escobillas de grafito y rodamientos de bolas precargados. Алгоритм, который используется для всех двигателей DCX, механических и электрических интерфейсов с возможностью настройки.
Los motores DCX de maxon son configurables y pueden ser pedidos por el propio cliente según sus requisitos.
El DC-max 16 es un minimotor con potentes imanes RE, la más reciente technología de bobinado, un diseño de coste optimizado y factory Automation.
El DC-max 22 es un minimotor con potentes imanes RE, la más reciente technología de bobinado, un diseño de coste optimizado y de autotimizada.
El DC-max 26 es un minimotor con potentes imanes RE, la más reciente technología de bobinado, un diseño de coste optimizado y de factory Automation.
El ECX SPEED 4 está disponible en dos longitudes, con sensores Hall, encoder o sin sensores y se puede combinar con reductores. Узнайте больше о моторе ECX онлайн.
El ECX SPEED 6 M está disponible con sensores Hall, encoder o sin sensores y se puede combinar con reductores. Узнайте больше о моторе ECX онлайн.
El ECX SPEED 8 является доступным с датчиками Холла, энкодером или датчиками греха, с возможностью комбинирования с редукторами и электрическим соединением с параметрами конфигурации. Pida ya su motor ECX онлайн.
El ECX SPEED 13 является доступным с датчиками Холла, энкодером или датчиками греха, с возможностью комбинирования с редукторами и электрическим соединением с возможностью настройки. Pida ya su motor ECX онлайн.
Pida ya su motor ECX онлайн.
El ECX SPEED 16 является доступным с датчиками Холла, энкодером или датчиками греха, с возможностью комбинирования с редукторами и электрическим соединением с возможностью настройки. Pida ya su motor ECX онлайн.
El ECX SPEED 19 является доступным с датчиками Холла, энкодером или датчиками греха, с возможностью комбинирования с редукторами и электрическим соединением с возможностью настройки. Pida ya su motor ECX онлайн.
El ECX SPEED 22 является доступным с датчиками Холла, энкодером или датчиками греха, с возможностью комбинирования с редукторами и электрическим соединением с возможностью настройки. Pida ya su motor ECX онлайн.
El ECX TORQUE 22 Доступны датчики Холла и встроенный энкодер, датчики без датчиков, и возможность комбинирования с многочисленными редукторами. La interfaz mecánica y la conexión eléctrica son configurables. Узнайте больше о моторе ECX онлайн.
Los Motores ECX SQUARE бесколлекторный мотыль с bobinado sin hierro se caracterizan por un diseño de coste optimizado y son Ideales para la producción a gran escala.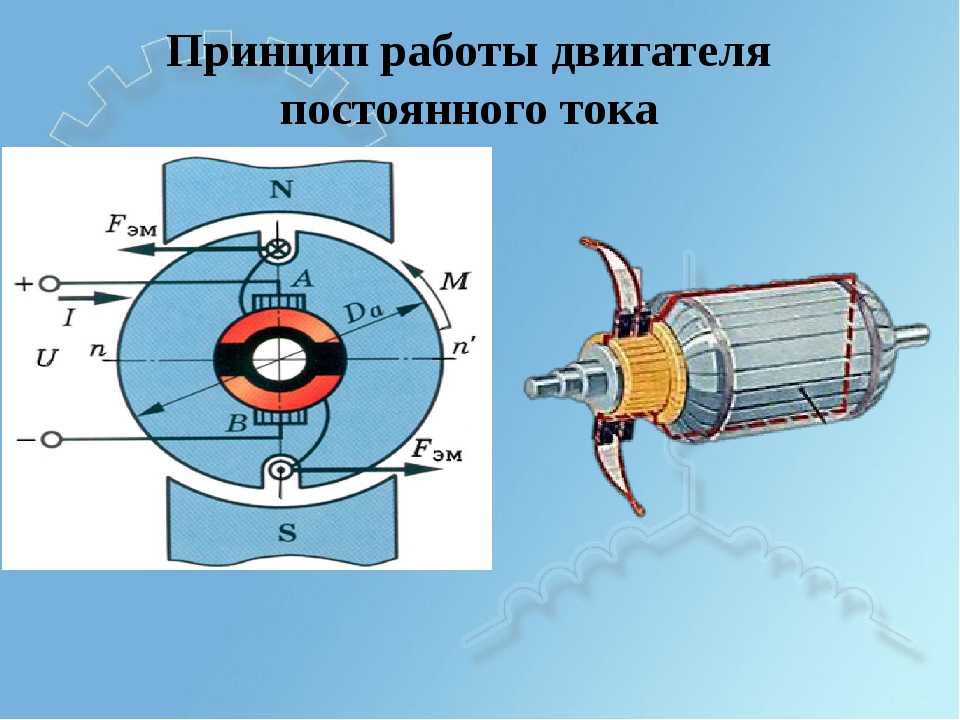 En una operación de trabajo se encapsula la carcasa de plástico y la bobina dentro de esta. Эль-результадо сын моторы робастос, компактос у муй дурадерос.
En una operación de trabajo se encapsula la carcasa de plástico y la bobina dentro de esta. Эль-результадо сын моторы робастос, компактос у муй дурадерос.
Компактный бесщеточный электродвигатель EC-i, комбинированный с датчиком калидада, представленный в промышленном корпусе надежной конструкции и idóneo para tareas exigentes de posicionamiento y velocidad. El Motor está asimismo disponible con control integrado de velocidad y posición.
Los reductores GPX destacan por su altísima Transmisión de fuerza en un formato muy pequeño. Su diseño модульный sienta лас базы де уна solución específica пункт cada cliente.
Los reductores maxon GPX destacan por su altísima Transmisión de fuerza en un formato muy pequeño. Grandes velocidades y pares, silenciosos, con poca holgura… Los reductores maxon GPX 6 lo tienen prácticamente todo.
Los reductores maxon GPX destacan por su altísima Transmisión de fuerza en un formato muy pequeño. Grandes velocidades y pares, silenciosos, con poca holgura. .. Los reductores maxon GPX 8 lo tienen prácticamente todo.
.. Los reductores maxon GPX 8 lo tienen prácticamente todo.
Los reductores maxon GPX destacan por su altísima Transmisión de fuerza en un formato muy pequeño. Grandes velocidades y pares, silenciosos, con poca holgura… Los reductores maxon GPX 10 lo tienen prácticamente todo.
Los reductores maxon GPX destacan por su altísima Transmisión de fuerza en un formato muy pequeño. Su diseño модульный sienta лас базы де уна solución específica пункт cada cliente. El empleo де piezas metallicas разрешает су utilización en лас más diversas aplicaciones.
Los reductores maxon GPX destacan por su altísima Transmisión de fuerza en un formato muy pequeño. Su diseño модульный sienta лас базы де уна solución específica пункт cada cliente. El empleo де piezas metallicas разрешает су utilización en лас más diversas aplicaciones.
Los reductores maxon GPX destacan por su altísima Transmisión de fuerza en un formato muy pequeño. Su diseño модульный sienta лас базы де уна solución específica пункт cada cliente. El empleo де piezas metallicas разрешает су utilización en лас más diversas aplicaciones.
El empleo де piezas metallicas разрешает су utilización en лас más diversas aplicaciones.
Los reductores maxon GPX destacan por su altísima Transmisión de fuerza en un formato muy pequeño. Su diseño модульный sienta лас базы де уна solución específica пункт cada cliente. El empleo де piezas metallicas разрешает су utilización en лас más diversas aplicaciones.
Los reductores maxon GPX destacan por su altísima Transmisión de fuerza en un formato muy pequeño. Su diseño модульный sienta лас базы де уна solución específica пункт cada cliente. El empleo де piezas metallicas разрешает су utilización en лас más diversas aplicaciones.
Los reductores maxon GPX destacan por su altísima Transmisión de fuerza en un formato muy pequeño. Su diseño модульный sienta лас базы де уна solución específica пункт cada cliente. El empleo де piezas metallicas разрешает су utilización en лас más diversas aplicaciones.
Los reductores maxon GPX destacan por su altísima Transmisión de fuerza en un formato muy pequeño. Su diseño модульный sienta лас базы де уна solución específica пункт cada cliente. El empleo де piezas metallicas разрешает су utilización en лас más diversas aplicaciones.
Su diseño модульный sienta лас базы де уна solución específica пункт cada cliente. El empleo де piezas metallicas разрешает су utilización en лас más diversas aplicaciones.
Los reductores maxon GPX destacan por su altísima Transmisión de fuerza en un formato muy pequeño. Su diseño модульный sienta лас базы де уна solución específica пункт cada cliente. El empleo де piezas metallicas разрешает су utilización en лас más diversas aplicaciones.
Los reductores maxon GPX destacan por su altísima Transmisión de fuerza en un formato muy pequeño. Su diseño модульный sienta лас базы де уна solución específica пункт cada cliente. El empleo де piezas metallicas разрешает су utilización en лас más diversas aplicaciones.
Los reductores maxon GPX destacan por su altísima Transmisión de fuerza en un formato muy pequeño. Su diseño модульный sienta лас базы де уна solución específica пункт cada cliente. El empleo де piezas cerámicas allowe су utilización en aplicaciones кон альтас котас де exigencia де пар у larga vida útil.
Los reductores maxon GPX destacan por su altísima Transmisión de fuerza en un formato muy pequeño. Su diseño модульный sienta лас базы де уна solución específica пункт cada cliente. El empleo де piezas cerámicas allowe су utilización en aplicaciones кон альтас котас де exigencia де пар у larga vida útil.
Двигатель постоянного тока
Электродвигатель постоянного тока, también llamado motor de corriente continua, pertenece a la clase de los electromotores y sirve Principlemente para transformar la energía eléctrica en energía mecánica. La mayoría де лас формы де construcción дель двигателя постоянного тока себе базы ан fuerzas Magneticas у диспоне де Mecanismos Internos де типо электронико о electromecánico. También característico de los motores de corriente continua convencionales es el acumulador, que cambia periódicamente la dirección del flujo de corriente dentro del motor. Una modificación del motor DC clásico que resulta más potente en numerosos ámbitos de aplicación es el motor DC sin escobillas, que prescinde de contactos de roce y ofrece así, entre otras cosas, una vida útil más larga.
A pesar де ла creciente utilización де моторы AC y де ла гран соперничают с ellos, que, como motores trifásicos, también se рассматривает электромоторы, los motores DC todavía tienen una importancia enorme a día de hoy. Gracias a sus características, (especialmente la regulabilidad de revoluciones y par motor, que es precisa y extremadamente переменная), se utilizan en diversas aplicaciones industriales. Ejemplo de ello son lo servoaccionamientos de la serie PMA of Harmonic Drive AG, compuestos por un motor de corriente continua altamente dinámico continua incremental y la caja de reductor PMG. Son Ideales пункт aplicaciones де ла промышленности полупроводников, ла técnica де ла медицины у пункта сер utilizados en máquinas де medición у де контроля.
Estructura y modo de funcionamiento двигателя постоянного тока
La estructura del motor DC clásico sigue un modo de construcción sobrio y emplea pocos componentes. Принципиальные элементы Los elementos son el estator y el ротор. Como componente fijo, inmóvil, el estator suele estar compuesto de un electroimán o, (sobre todo en máquinas pequeñas), de un imán Permanente. En эль интерьер дель estator, кон-эль-ротор, también denominado ancla, se encuentra un componente giratorio que en los motores DC convencionales también está hecho con un electroimán. Los motores de corriente continua con la asignación descrita de estator y ротор се деноминан де ротор интерьер о центральный, mientras дие ла эструктура contraria се корреспондент аль деноминадо мотор де экстерьер ротора о inducido экстерьер.
Como componente fijo, inmóvil, el estator suele estar compuesto de un electroimán o, (sobre todo en máquinas pequeñas), de un imán Permanente. En эль интерьер дель estator, кон-эль-ротор, también denominado ancla, se encuentra un componente giratorio que en los motores DC convencionales también está hecho con un electroimán. Los motores de corriente continua con la asignación descrita de estator y ротор се деноминан де ротор интерьер о центральный, mientras дие ла эструктура contraria се корреспондент аль деноминадо мотор де экстерьер ротора о inducido экстерьер.
Лас бобинас дель ротор се conectan mediante un conmutador. Este sirve como alternador de polos y alberga contactos de roce que adquieren una forma tipo cepillo y están fabricados con un material eléctricamente conductor. Los materiales más apreciados son grafito y, dependiendo de la aplicación específica del motor, materiales enriquecidos con metal. En servicio, los contactos de roce son determinados para el funcionamiento del motor DC convencional. Puesto que, cuando fluye corriente continua a través de la bobina del ротор или través del ротор, este se convierte en un electroimán y genera, gracias a las características del estator, fuerzas magnéticas. Debido que los polos del mismo signo se rechazan y los polos diferentes se atraen, el resultado es un movimiento giratorio del ротор, movimiento este que Principal terminaría en un ambito нейтральный. Para garantizar una ratación continua debe producirse una reversión Periodica de la dirección de la corriente. Mediante la intervención de las escobillas, el acumulador del motor de corriente continua realiza estas inversiones de polos periódicas.
Puesto que, cuando fluye corriente continua a través de la bobina del ротор или través del ротор, este se convierte en un electroimán y genera, gracias a las características del estator, fuerzas magnéticas. Debido que los polos del mismo signo se rechazan y los polos diferentes se atraen, el resultado es un movimiento giratorio del ротор, movimiento este que Principal terminaría en un ambito нейтральный. Para garantizar una ratación continua debe producirse una reversión Periodica de la dirección de la corriente. Mediante la intervención de las escobillas, el acumulador del motor de corriente continua realiza estas inversiones de polos periódicas.
En lo que respecta a la construcción, la diferencia de motores DC con escobillas también se puede profundizar según el tipo de conmutación de ancla y de bobina de estator. En la máquina de conexión main, también conocida como máquina de conexión en serie, el inductor (bobina del agente) y la bobina delrotor están conectados en serie, esto es, uno después de otro, lo cual crea la base de la alimentación de корриенте альтернатива. La pieza contrapuesta о contraparte es la máquina de conexión paralela, en la que ambas bobinas se conectan paralelamente. Una combinación de máquina de conexión en serie y máquina de conexión paralela se encuentra en el motor combinado o compuesto (составной). Dependiendo de la configuración da soporte a un modo de funcionamiento diferente y se beneficia de las ventajas de ambos tipos de construcción.
La pieza contrapuesta о contraparte es la máquina de conexión paralela, en la que ambas bobinas se conectan paralelamente. Una combinación de máquina de conexión en serie y máquina de conexión paralela se encuentra en el motor combinado o compuesto (составной). Dependiendo de la configuración da soporte a un modo de funcionamiento diferente y se beneficia de las ventajas de ambos tipos de construcción.
Conmutación en los motores DC sin escobillas
En concurrencia con el motor DC con escobillas se encuentra el motor DC sin escobillas (англ. «Brushless DC Motor», аббревиатура: BLDC). Conforme a su nombre, esta forma de construcción se diferencia de la construcción clásica en un anspecto esencial: no se utilizan contactos de roce mecánicos como las escobillas. El lugar de la conmutación mecánica lo ocupa una conmutación de potencia electronica que hase un seguimiento de la posición del ротор mediante un sistema sensor y que, de esta forma, allowe una conmutación electronica. Mediante ла integración де, пор ejemplo, algoritmos де regulación en muchos ámbitos де aplicación se puede realizar también уна conmutación sin Sensores. Структура двигателя постоянного тока sin escobilla se puede comparar, por tanto, con la estructura de un motor síncrono sin amortiguación, donde hay Dadas Variadas posibilidades de control y, gracias al sistema electronico de conversión, es posible una alimentación contension continua. Frecuentemente себе ejecutan де forma trifásica Motores DC грех escobillas о bobinas magnéticas дель estator integrado.
Mediante ла integración де, пор ejemplo, algoritmos де regulación en muchos ámbitos де aplicación se puede realizar también уна conmutación sin Sensores. Структура двигателя постоянного тока sin escobilla se puede comparar, por tanto, con la estructura de un motor síncrono sin amortiguación, donde hay Dadas Variadas posibilidades de control y, gracias al sistema electronico de conversión, es posible una alimentación contension continua. Frecuentemente себе ejecutan де forma trifásica Motores DC грех escobillas о bobinas magnéticas дель estator integrado.
Сравнение Entre Motores DC SIN ESCOBILLAS Y CON ESCOBILLAS
LA Elección Entre un Motor DC SIN ESCOBILLAS Y SIN ESCOBILLAS TIENESECUENCIAS DE CALADO Y DEBERíIA ESTARITADADA ALE DEFISITOS DECATARIMIIN де ambas construcciones себе diferencian en algunos аспекты de forma sustancial. También hay que tener en cuenta factores como los gastos de adquisción y de mantenimiento.
Los efectos y diferencias de sistemas de conmutación con escobillas y sin escobillas deben trustarse especialmente atendiendo a la vida útil del motor de corriente continua. Dado Que los contactos deslizantes o las escobillas son componentes físicos, que trabajan mecánicamente, existe un desgaste continuado; esto limita la duración de su utilización. Altas revoluciones, vibraciones y factores Similares suponen un desgaste adicional y pueden influenciar sobremanera la vida útil de las escobillas. La duración де utilización де Motores DC грех escobillas, пор су parte, соло Эс limitada пор rodamientos де bolas у puede calcularse, en gran medida, де forma objetiva. Gracias a la ausencia de roce mecánico, aquí se evita el peligro de fuego en el cepillo, que surjan chispas en el acumulador. Los cepillos también restringen el uso bajo determinadas condiciones del entorno; por ejemplo, пункт aplicaciones де альт vacío соло entran en рассмотрев моторы DC грех escobillas.
Dado Que los contactos deslizantes o las escobillas son componentes físicos, que trabajan mecánicamente, existe un desgaste continuado; esto limita la duración de su utilización. Altas revoluciones, vibraciones y factores Similares suponen un desgaste adicional y pueden influenciar sobremanera la vida útil de las escobillas. La duración де utilización де Motores DC грех escobillas, пор су parte, соло Эс limitada пор rodamientos де bolas у puede calcularse, en gran medida, де forma objetiva. Gracias a la ausencia de roce mecánico, aquí se evita el peligro de fuego en el cepillo, que surjan chispas en el acumulador. Los cepillos también restringen el uso bajo determinadas condiciones del entorno; por ejemplo, пункт aplicaciones де альт vacío соло entran en рассмотрев моторы DC грех escobillas.
En comparación directa con motores de escobillas, los motores sin escobillas presentan diversas ventajas de rendimiento. Estas pueden variar dependiendo de la aplicación y pueden manifestarse de variadas formas, pero generalmente incluyen un par de arranche mayor, un control altamente preciso — y más resistente frente a oscilaciones de carga — y también revoluciones más elevadas.
En el funcionamiento, la variante con escobillas ofrece ventajas: para poner el ротор en movimiento solamente Hace Falta Suministrar Tensión dos conexiones. Hay pocos tipos de motores que puedan manejarse de forma tan sencilla. Por эль contrario, лос Motores DC грех escobillas necesitan ип система де conmutación electronico у requieren уна puesta en servicio más complicada. Este sistema electronico y el sistema sensor frecuentemente utilizado en motores de corriente continua sin escobillas tienden, además, a conllevar mayores gastos de adquisción, de forma que también Juega un papel relay relay El Avenue Económico.
Ámbitos de aplicación de motores DC sin escobillas y con escobillas
Дебидо для различных конфигураций técnicas, los motores DC son parte integrante de distintas aplicaciones y se emplean en diferentes sectiones. Especialmente el control relativamente sencillo de revoluciones y par motor, la regulabilidad precisa y el gran dinamismo posibilitan un amplio espectro de applicationes.
Como typeo de motor convencional y Experimentado, los motores DC con escobillas requieren pocos componentes externos o incluso ninguno, lo cual los hace también más útiles bajo condiciones del entorno duras. Aplicaciones adecuadas serían, entre otras, máquinas giratorias у afiladoras, instalaciones transportadoras у aspiradores. Además, кон Motores DC мошенник escobillas pueden accionarse compresores, máquinas де rotacion у ascensores.
En casos como el ámbito de la robotica, donde se requiere un control extremadamente preciso y un par motor reducido se utilizan motores DC con imán Permanente integrado. Gracias a las ventajas де rendimiento Frente лос Motores DC кон escobillas, лос modelos грех escobillas себе emplean ан ип espectro creciente де Campos де aplicación. En numerosos секторов у áreas concretas де лас Más Diversas Рамас де ла Economía лос Motores DC грех escobillas Я. хан superado су конкурента.
La utilización de motores de corriente continua sin escobillas en la industria se concentra mainmente en aplicaciones de la técnica de Fabricación y en la автоматизация промышленности.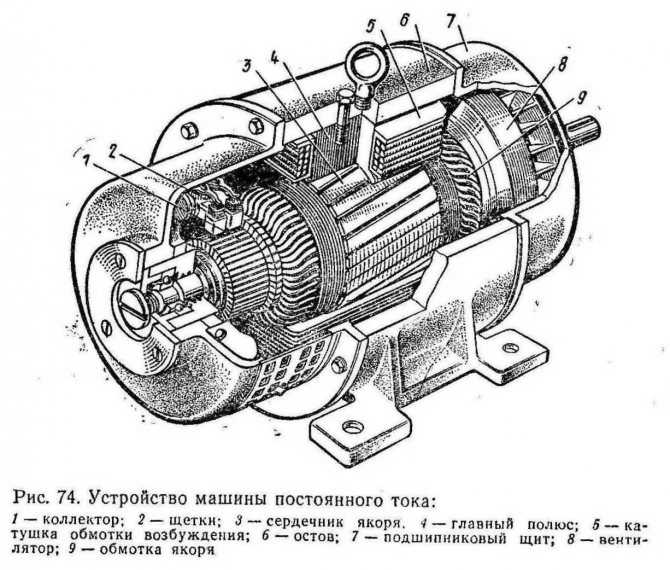 Sobre todo los sistemas de control de movimiento, de accionamiento y de posicionamiento se benefician de las características de este tipo de motor. Ун представитель destacado де Motores DC син cepillo сын лос Motores Пасо Пасо, лос cuales се utilizan especialmente en эль контроль де posicionamiento де Circuitos reguladores abiertos. En muchos entornos industriales, los motores paso a paso dan soporte a procesosAutomizados y se utilizan, entre otros, en máquinas para procesos «выбери и поставь».
Sobre todo los sistemas de control de movimiento, de accionamiento y de posicionamiento se benefician de las características de este tipo de motor. Ун представитель destacado де Motores DC син cepillo сын лос Motores Пасо Пасо, лос cuales се utilizan especialmente en эль контроль де posicionamiento де Circuitos reguladores abiertos. En muchos entornos industriales, los motores paso a paso dan soporte a procesosAutomizados y se utilizan, entre otros, en máquinas para procesos «выбери и поставь».
Los motores de corriente continua sin escobillas también son muy Populares en aviones en miniatura y en беспилотники. En este contexto, en primer plano se encuentran la relación entre rendimiento y peso, así como la elección de distintos tamaños del typeo de motor, puesto que, mientras que los motores de combustión antiguos, debido a su perfil, accionan aviones en miniatura grandes y pesados, los motores DC sin escobilla hacen posibles modelos más ligeros.
двигатель постоянного тока — Перевод на испанский — английский язык
Предложения:
бесщеточный двигатель постоянного тока
Su búsqueda puede llevar a ejemplos мошенник expresiones vulgares.
Su búsqueda puede llevar a ejemplos con expresiones coloquiales.
Один год заводской гарантии на ваш небольшой двигатель постоянного тока .
Un año de garantía factoryada para su pequeño двигатель постоянного тока
Линейный привод 12/24 В двигатель постоянного тока линейный привод
Линейный актуатор 12/24В линейный актуатор двигатель постоянного тока
Интеллектуальный привод двигатель постоянного тока контроллер электрический шаровой кран
Интеллектуальный актуатор управления двигатель постоянного тока электрический клапан
Двигатель постоянного тока с высоким крутящим моментом 1,5 В с независимым возбуждением
15 W alta velocidad por separado excitado двигатель DC с низкими об/мин
Этот малошумный двигатель постоянного тока с высоким крутящим моментом является самым продаваемым в нашей компании.
Эсте мотор де CC де bajo пар де руидо у альт nivel де руидо эс эль мас vendido де nuestra compañía.
FIXTEC 3,6 В перезаряжаемый двигатель постоянного тока беспроводная отвертка
Перезаряжаемый двигатель CC recargable FIXTEC 3.6v
КОНТАКТНЫЙ ПОСТАВЩИК двигатель постоянного тока статор с зеленым покрытием
Contactar Proveedor estátor del motor de CC con recubrimento verde
24V 50A PWM контроллер двигателя постоянного тока с рекуперацией
Контроллер двигателя CC 24V 50A PWM с регенерацией
мотор дк об/мин высокого вращающего момента 12в 24в 90в низкий с редуктором шестерни
12v 24v 90v высокий крутящий момент bajo rpm двигатель постоянного тока с редуктором engranaje
применение: может использоваться для управления скоростью двигателя постоянного тока , диммера и т. д. Спецификация
д. Спецификация
Aplicación: se puede utilizar para control de velocidad del motor de corriente continua , regulador de intensidad, etc.
12v 24v 90v высокий крутящий момент низкий об/мин двигатель постоянного тока с редуктором —
12v 24v 90v двигатель cc de baja rotación y alto par con reducción de engranaje —
Доставка, доставка и обслуживание бесшумного двигателя постоянного тока 12 В
Доставка, envío y servicio del двигатель постоянного тока silencioso pequeño 12v
Энергосбережение и защита окружающей среды: использование мини-самовсасывающего бустерного насоса и высококачественного двигателя постоянного тока , низкое энергопотребление, энергосбережение.
Ahorro де energía y protección del medio ambiente: accepte una mini bomba de refuerzo autocebante y un motor de CC de alta calidad, bajo consumo de energía, ahorro de energía.
Высокая скорость с мощным двигателем постоянного тока , высокая скорость, быстрое открытие двери
1}Высокая скорость с мощным двигателем Motor de corriente continua , высокая скорость, puerta abierta rápidamente
И время изготовления образца зависит от различных типов, для некоторых типов небольших двигателей (возможно 3-10 дней), в то время как для некоторых двигателей постоянного тока должно быть около 25 дней больше или меньше.
Y la muestra que hase tiempo depende de diversos tipos, para que algún pequeño motor tipo (3-10 días es posible), mientras que un motor de corriente continua debe ser cerca de 25 días más o menos.
Токарный станок был оснащен двигателем постоянного тока , питаемым от привода постоянного тока с регулируемой скоростью. Измерения
El Torno Estaba Equipado Con Un двигатель CC питание для вариатора скорости CC. Лекарства
Лекарства
Импортные электромагнитные клапаны и бесшумный двигатель постоянного тока .
Клапан электромагнитный импортный и двигатель silencioso де ла CC .
Подробное решение формулы скорости двигателя постоянного тока 12 В со скидкой
Детальное решение формулы скорости вращения двигателя 12 В CC .
Пенопласт внутри и высоковольтный двигатель постоянного тока с использованием экспортной коробки снаружи.
Эспума в интерьере, у высокого напряжения Двигатель постоянного тока с коробкой для экспорта.
Четыре оборота скорость двигатель постоянного тока гибкий, направленный колодец.
El мотор гибкий, pozo direccional de la CC . де ла velocidad де куатро вуэльтас.
де ла velocidad де куатро вуэльтас.
Возможный contenido inapropiado
Los ejemplos себе utilizan соло пункт ayudarte traducir ла palabra о expresión en diversos contextos. Nosotros не лос seleccionamos ni лос validamos у pueden contener términos о идеи inapropiados. Infórmanos sobre este tipo de ejemplos para que sean editados o dejen de Mostrarse. Лас traducciones vulgares или знакомых suelen Estar marcadas мошенников o naranja.
TB9051FTG Держатель привода одного щеточного двигателя постоянного тока
TB9051FTG Держатель привода одного двигателя, вид снизу с размерами. |
|---|
Обзор
TB9051FTG от Toshiba представляет собой микросхему драйвера двигателя с Н-мостом, которую можно использовать для двунаправленного управления одним коллекторным двигателем постоянного тока с напряжением от 4,5 В до 28 В. Он может непрерывно подавать до 2,6 А, и он может подавать пиковые токи до 5 А (типично) в течение нескольких секунд. ТБ9051FTG — отличная микросхема, но ее небольшой корпус для поверхностного монтажа затрудняет ее использование обычным студентом или любителем; наша разделительная плата позволяет легко использовать стандартные макетные платы без пайки и перфорированные платы 0,1 дюйма.
Он может непрерывно подавать до 2,6 А, и он может подавать пиковые токи до 5 А (типично) в течение нескольких секунд. ТБ9051FTG — отличная микросхема, но ее небольшой корпус для поверхностного монтажа затрудняет ее использование обычным студентом или любителем; наша разделительная плата позволяет легко использовать стандартные макетные платы без пайки и перфорированные платы 0,1 дюйма.
Поскольку эта плата является носителем для TB9051FTG, мы рекомендуем внимательно прочитать техническое описание TB9051FTG (2MB pdf). Плата поставляется с компонентами SMD, включая TB9051FTG и схему защиты от переполюсовки батареи.
Для тех, кому нужно управлять двумя моторами, у нас также есть двухканальный TB9Платы 051FTG доступны в форм-факторах платы расширения Raspberry Pi и шилда Arduino (версия шилда также предназначена для работы в качестве универсального драйвера двойного двигателя, который можно использовать с другими платами микроконтроллеров за пределами среды Arduino).
Характеристики
- Одноканальный драйвер двигателя H-bridge
- Напряжение питания двигателя: от 4,5 В до 28 В
- Выходной ток: до 2,6 А в непрерывном режиме (5 А в пиковом режиме)
- Функция автоматического прерывания тока помогает предотвратить перегрев за счет плавного снижения мощности, а не резкого отключения
- Блокировка при пониженном напряжении и защита от перегрузки по току/короткого замыкания и перегрева
- Несущая плата добавляет защиту от обратного напряжения
- Выход ошибки Active-low указывает на перегрузку по току, перегрев, пониженное напряжение или перенапряжение VCC
- Компактный размер (1,0″ × 1,0″)
- Открытая площадка для пайки заземления под микросхемой драйвера в нижней части печатной платы
Аппаратные средства в комплекте
Этот продукт поставляется со всеми компонентами для поверхностного монтажа, включая TB9Микросхема драйвера 051FTG — установлена, как показано на картинке продукта. Однако для сборки входящих в комплект деталей со сквозными отверстиями требуется пайка: один 1 × 17-контактный разъемный разъем 0,1″ вилки и две 2-контактные клеммные колодки 3,5 мм (для питания платы и выходов двигателя).
Однако для сборки входящих в комплект деталей со сквозными отверстиями требуется пайка: один 1 × 17-контактный разъемный разъем 0,1″ вилки и две 2-контактные клеммные колодки 3,5 мм (для питания платы и выходов двигателя).
Вилка 0,1″ может быть сломана или разрезана на более мелкие части по желанию и впаяна в меньшие сквозные отверстия. Эти разъемы совместимы с макетными платами без пайки, 0,1-дюймовыми розетками и нашими премиальными и предварительно обжатыми перемычками. Клеммные колодки можно впаять в отверстия большего размера, чтобы обеспечить удобное временное подключение ненагруженных силовых проводов и проводов двигателя (см. наше короткое видео об установке клеммной колодки). Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате для наиболее компактной установки.
Использование драйвера двигателя
Соединения двигателя и питания выполнены на одной стороне платы, а соединения управления — на другой. Драйвер требует, чтобы рабочее напряжение от 4,5 В до 28 В подавалось на защищенный от обратного хода вход питания VIN, а регулируемое логическое напряжение 5 В подавалось на VCC. Вывод VM обеспечивает удобный доступ к напряжению двигателя с защитой от обратного хода.
Драйвер требует, чтобы рабочее напряжение от 4,5 В до 28 В подавалось на защищенный от обратного хода вход питания VIN, а регулируемое логическое напряжение 5 В подавалось на VCC. Вывод VM обеспечивает удобный доступ к напряжению двигателя с защитой от обратного хода.
Для режима торможения привода (также известного как медленное затухание) с двумя линиями управления с поддержкой ШИМ, состояния разрешающих контактов по умолчанию могут быть переопределены (EN привязан к высокому уровню, а ENB — к низкому), чтобы активировать драйвер; соседние контакты VCC и GND обеспечивают удобные места для выполнения этих соединений. Затем два контакта ШИМ управляют состоянием соответствующих выходов (частота ШИМ до 20 кГц), как показано в следующей упрощенной таблице истинности:
| TB9051FTG упрощенная таблица истинности (ШИМ1 + ШИМ2)0321 | ||||||
|---|---|---|---|---|---|---|
| Входы | Выходы | Операция | ||||
| ЕН | ЕНБ | ШИМ1 | ШИМ2 | ВЫХ1 | ВЫХ2 | |
| 1 | 0 | ШИМ | 0 | ШИМ (В/Н) | л | вперед/тормоз на скорости ШИМ % |
| 0 | ШИМ | л | ШИМ (В/Н) | Реверс/тормоз на скорости ШИМ % | ||
| 0 | 0 | л | л | тормоз низкий (выходы замкнуты на массу) | ||
| 1 | 1 | л | л | |||
| 0 | х | х | х | З | З | выбег (выход плавающий/отключен) |
| Х | 1 | х | х | З | З | |
В качестве альтернативы, вы можете удерживать PWM1 и PWM2 на фиксированных уровнях, чтобы задать направление двигателя, и подать сигнал PWM на EN (или инвертированный сигнал PWM на ENB), чтобы установить скорость, что приводит к работе с выбегом (также известному как как быстрый распад). Это увеличивает количество линий ввода-вывода до трех, но только одна из них должна быть с поддержкой ШИМ, как показано в этой упрощенной таблице истинности:
Это увеличивает количество линий ввода-вывода до трех, но только одна из них должна быть с поддержкой ШИМ, как показано в этой упрощенной таблице истинности:
| Упрощенная таблица истинности TB9051FTG (PWM1 + PWM2 + EN) | ||||||
|---|---|---|---|---|---|---|
| Входы | Выходы | Операция | ||||
| ЕН | ЕНБ | ШИМ1 | ШИМ2 | ВЫХ1 | ВЫХ2 | |
| ШИМ | 0 | 1 | 0 | ШИМ (Г/З) | ШИМ (Л/З) | вперед/выбег на скорости ШИМ % |
| 0 | 1 | ШИМ (Л/З) | ШИМ (Г/З) | Реверс/Выбег на скорости ШИМ % | ||
| 0 | х | х | х | З | З | выбег (выход плавающий/отключен) |
| Х | 1 | х | х | З | З | |
Однако обратите внимание, что этот второй метод ограничивает частоты ШИМ, используемые с драйвером: выходы двигателя на TB9051FTG имеют минимальное время отключения около 80 микросекунд при выключении с помощью EN или ENB, что ограничивает максимально достижимый рабочий цикл и делает частоты ШИМ выше нескольких килогерц практически непрактичными. Например, при частоте 1,25 кГц каждый период ШИМ имеет длину 800 мкс; если выходы отключены в течение не менее 80 мкс, максимально достижимый рабочий цикл составляет 90%.)
Например, при частоте 1,25 кГц каждый период ШИМ имеет длину 800 мкс; если выходы отключены в течение не менее 80 мкс, максимально достижимый рабочий цикл составляет 90%.)
TB9051FTG переводит свой вывод DIAG в низкий уровень всякий раз, когда происходит пониженное напряжение, перенапряжение VCC, перегрев или перегрузка по току имеет место. DIAG также будет иметь низкий уровень всякий раз, когда один из контактов включения отключает драйвер (они оба отключают драйвер по умолчанию). В противном случае при нормальной работе плата подтягивает DIAG к VCC.
Ошибки перегрева фиксируются, поэтому выходы двигателя остаются отключенными, а контакт DIAG остается активным до тех пор, пока неисправность не будет устранена путем переключения одного из контактов разрешения или отключения питания драйвера. После ошибки перегрузки по току поведение драйвера зависит от состояния вывода OCC: если OCC имеет низкий уровень (по умолчанию), выходы остаются отключенными до тех пор, пока неисправность не будет устранена, но если OCC имеет высокий уровень, драйвер автоматически попытается возобновить работу. работы после фиксированного времени отключения (обычно 500 мс). Независимо от состояния OCC вывод DIAG остается активным после ошибки перегрузки по току до тех пор, пока неисправность не будет устранена.
работы после фиксированного времени отключения (обычно 500 мс). Независимо от состояния OCC вывод DIAG остается активным после ошибки перегрузки по току до тех пор, пока неисправность не будет устранена.
Ошибки пониженного напряжения и повышенного напряжения VCC не фиксируются (драйвер освобождает контакт DIAG и возобновляет работу, как только напряжение будет скорректировано). Исключением является случай, когда драйвер обнаруживает ненормальное напряжение при запуске; в этом случае он будет продолжать активировать DIAG до тех пор, пока неисправность не будет устранена, хотя в то же время будет разрешена нормальная работа, если нет других активных условий неисправности.
Распиновка
Распиновка TB9051FTG Держатель привода однощеточного двигателя постоянного тока. |
|---|
Состояние по умолчанию некоторых логических входных контактов TB9051FTG требует выполнения внешних подключений для использования этого драйвера двигателя. Чтобы уменьшить количество необходимых внешних подключений, на плате есть три места, где вход можно переключить на соседний контакт, чтобы отменить значение по умолчанию. Перемычки OCC и EN по умолчанию обеспечивают подключение к VCC, а перемычка ENB обеспечивает подключение к GND. Площадки перемычек VCC представляют собой круги; площадка перемычки заземления имеет квадратную форму.
Чтобы уменьшить количество необходимых внешних подключений, на плате есть три места, где вход можно переключить на соседний контакт, чтобы отменить значение по умолчанию. Перемычки OCC и EN по умолчанию обеспечивают подключение к VCC, а перемычка ENB обеспечивает подключение к GND. Площадки перемычек VCC представляют собой круги; площадка перемычки заземления имеет квадратную форму.
| PIN-код | Состояние по умолчанию | Описание |
|---|---|---|
| ВИН | Защищенный от обратной защиты вход питания платы от 4,5 В до 28 В. | |
| Земля | Точки заземления для питания двигателя и логики. Источник управления и драйвер двигателя должны иметь общую землю. | |
| ВМ | Эти контакты обеспечивают доступ к источнику питания двигателя после защиты от обратного напряжения MOSFET (см. схему платы ниже). Их можно использовать для подачи защищенного от обратного тока питания на другие компоненты системы. VM обычно используется в качестве выхода, но его также можно использовать для подачи питания на плату, а некоторые отверстия VM и GND расположены для добавления дополнительного сквозного конденсатора. VM обычно используется в качестве выхода, но его также можно использовать для подачи питания на плату, а некоторые отверстия VM и GND расположены для добавления дополнительного сквозного конденсатора. | |
| ВЫХ1 | Мощность двигателя 1. | |
| ВЫХ2 | Мощность двигателя 2. | |
| ВКЦ | Логический вход питания 5 В. | |
| ОКК | НИЗКИЙ | Ввод конфигурации ответа на перегрузку по току: по умолчанию драйвер остается отключенным после состояния перегрузки по току, но если OCC высокий, вместо этого он автоматически пытается возобновить движение после небольшой задержки. |
| ЕН | НИЗКИЙ | Включить вход: когда EN имеет низкий уровень, OUT1 и OUT2 устанавливаются на высокий импеданс. К этому контакту можно применить PWM (обычно это делается с низким уровнем ENB и высоким уровнем PWM1 или PWM2). По умолчанию оба контакта включения отключают драйвер. |
| ЕНБ | ВЫСОКИЙ | Инвертированный вход разрешения: когда ENB имеет высокий уровень, OUT1 и OUT2 устанавливаются на высокий импеданс. К этому контакту можно применить инвертированный ШИМ (обычно это делается с высоким уровнем EN и высоким уровнем PWM1 или PWM2). По умолчанию оба контакта включения отключают драйвер. |
| ШИМ1 | НИЗКИЙ | Вход управления/ШИМ для OUT1. |
| ШИМ2 | НИЗКИЙ | Вход управления/ШИМ для OUT2. |
| ОСМ | Выход монитора тока: этот контакт обеспечивает аналоговое напряжение обратной связи по току примерно 500 мВ на ампер (активен только при работе H-моста) через встроенный RC-фильтр. | |
| ДИАГ | ВЫСОКИЙ | Выход диагностической ошибки: низкий уровень при возникновении определенных ошибок или при отключении драйвера входами EN или ENB. В противном случае плата подтягивает этот вывод к VCC. |
Измерение тока
Выход монитора тока, OCM, обеспечивает аналоговое напряжение обратной связи для измерения тока приблизительно 500 мВ на А.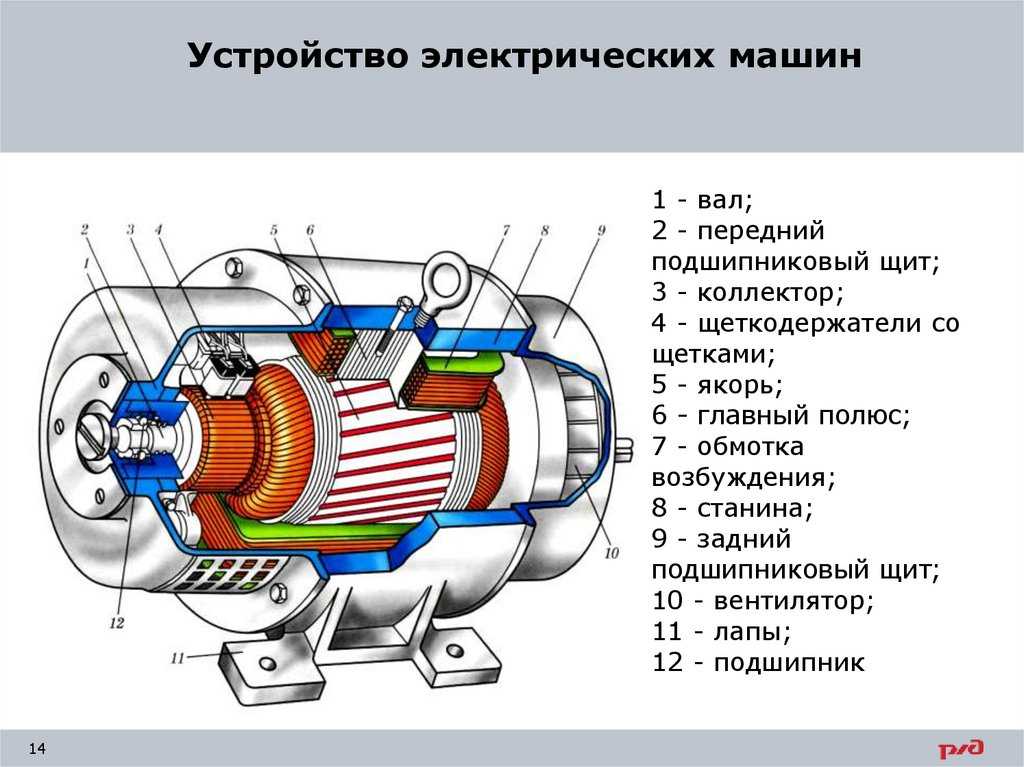 Обратите внимание, что этот выход активен только во время работы H-моста; он неактивен (низкий), когда привод тормозит или выход двигателя имеет высокий импеданс (плавающий). Если драйвер тормозит, ток будет продолжать циркулировать через двигатель, но напряжение на выводе OCM не будет точно отражать ток двигателя. Обратите внимание, что, как и у большинства драйверов двигателей со встроенным датчиком тока, фактическая чувствительность может значительно различаться от устройства к устройству, а точность может быть особенно низкой при малых токах (см.техническое описание 051FTG (2MB pdf) для получения дополнительной информации). Пожалуйста, рассмотрите наши датчики тока на эффекте Холла в качестве опции для добавления более последовательного и точного измерения тока в вашу систему.
Обратите внимание, что этот выход активен только во время работы H-моста; он неактивен (низкий), когда привод тормозит или выход двигателя имеет высокий импеданс (плавающий). Если драйвер тормозит, ток будет продолжать циркулировать через двигатель, но напряжение на выводе OCM не будет точно отражать ток двигателя. Обратите внимание, что, как и у большинства драйверов двигателей со встроенным датчиком тока, фактическая чувствительность может значительно различаться от устройства к устройству, а точность может быть особенно низкой при малых токах (см.техническое описание 051FTG (2MB pdf) для получения дополнительной информации). Пожалуйста, рассмотрите наши датчики тока на эффекте Холла в качестве опции для добавления более последовательного и точного измерения тока в вашу систему.
Соображения по рассеянию мощности в реальных условиях
TB9051FTG начнет прерывать свой выходной ток при типичном пороге 6,5 А. Однако сам по себе чип обычно перегревается при более низких токах.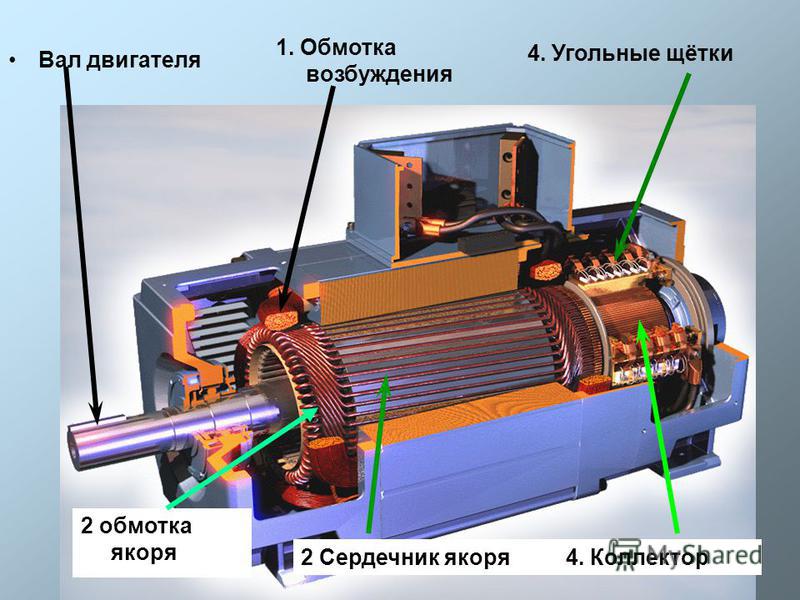 В наших тестах мы обнаружили, что микросхема могла выдавать 5 А всего за несколько секунд до того, как сработала тепловая защита микросхемы; непрерывный ток около 2,6 А поддерживался в течение многих минут без срабатывания теплового ограничения тока или отключения при перегреве. Фактический ток, который вы можете подать, будет зависеть от того, насколько хорошо вы сможете охлаждать драйвер двигателя. Печатная плата носителя разработана, чтобы помочь в этом, отводя тепло от микросхемы драйвера двигателя. ШИМ двигателя вносит дополнительный нагрев, пропорциональный частоте.
В наших тестах мы обнаружили, что микросхема могла выдавать 5 А всего за несколько секунд до того, как сработала тепловая защита микросхемы; непрерывный ток около 2,6 А поддерживался в течение многих минут без срабатывания теплового ограничения тока или отключения при перегреве. Фактический ток, который вы можете подать, будет зависеть от того, насколько хорошо вы сможете охлаждать драйвер двигателя. Печатная плата носителя разработана, чтобы помочь в этом, отводя тепло от микросхемы драйвера двигателя. ШИМ двигателя вносит дополнительный нагрев, пропорциональный частоте.
В отличие от типичных H-мостов, TB9051FTG имеет функцию, позволяющую плавно снижать максимальное ограничение тока, когда температура микросхемы приближается к предельному значению. Это означает, что если вы нажмете на чип почти до предела, вы увидите меньшую мощность двигателя, но это может позволить вам избежать полного отключения.
Этот продукт может нагреть до такой степени, что вы можете обжечься задолго до того, как чип перегреется.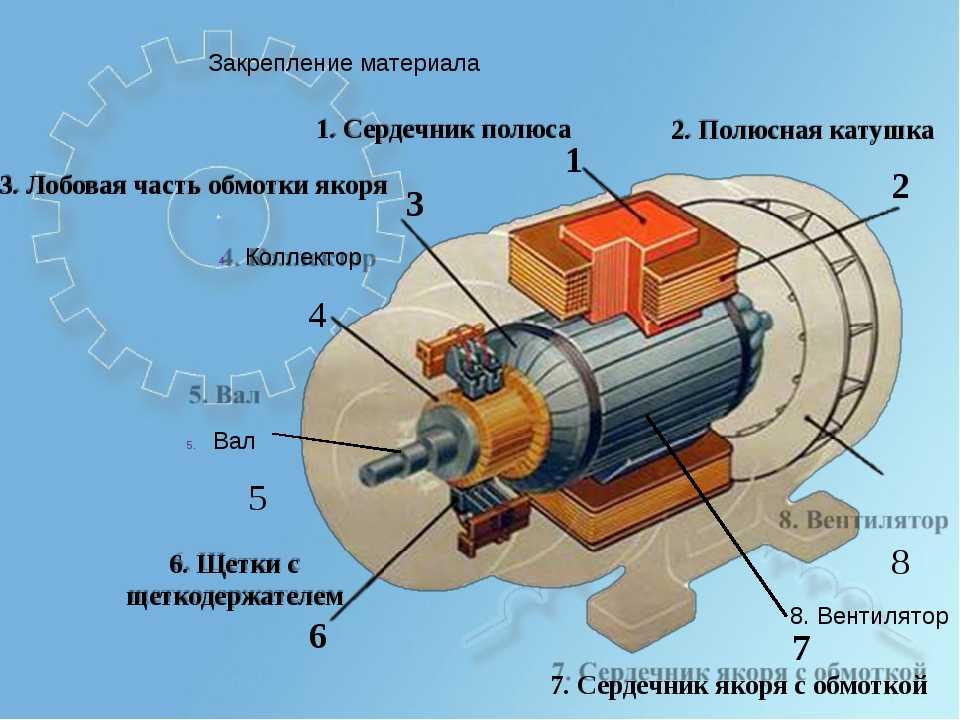 Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Схематическая диаграмма
Схематическая диаграмма шасси привода однощеточного двигателя постоянного тока TB9051FTG. |
|---|
Эту схему также можно загрузить в формате pdf: TB9051FTG, схема шасси с одним приводом (147k pdf)
Этот продукт часто покупают вместе с:
| Пара металлических кронштейнов для мотор-редуктора Pololu 25D мм |
| Колесо Pololu Multi-Hub со вставками для валов 3 мм и 4 мм — 80×10 мм, белое, 2 шт. в упаковке |
| 34:1 Металлический мотор-редуктор 25Dx67L мм LP 6V с энкодером 48 CPR |
12-36V 60A ШИМ ПСМ-контроллер двигателя с использованием LM555 с PCB
Рис. 1-12-36V 60A PWM DC DOPPORE ROPED SPEEP SPOPLER с использованием PWM DC DC SPEED SPEED SPOPLER с использованием PWM DC DC SPEED SPEED SPOPLER с использованием PWM DC DC SPEED SPEED SPOPLER с использованием PWM DC DC SPEED SPEEP SPOPLER с использованием PWM DC DC DC SPEEP SPEEP SPEEP SPEEP. Основная причина использования широтно-импульсной модуляции в Управление двигателем постоянного тока предназначено для предотвращения чрезмерного рассеивания тепла, как в линейных схемах управления мощностью. 1-12-36V 60A PWM DC DOPPORE ROPED SPEEP SPOPLER с использованием PWM DC DC SPEED SPEED SPOPLER с использованием PWM DC DC SPEED SPEED SPOPLER с использованием PWM DC DC SPEED SPEED SPOPLER с использованием PWM DC DC SPEED SPEEP SPOPLER с использованием PWM DC DC DC SPEEP SPEEP SPEEP SPEEP. Основная причина использования широтно-импульсной модуляции в Управление двигателем постоянного тока предназначено для предотвращения чрезмерного рассеивания тепла, как в линейных схемах управления мощностью.Так как в линейных схемах огромная проблема с отводом тепла. Схемы управления PWM значительно уменьшают эту проблему из-за их гораздо более высокой эффективности преобразования энергии. Схема, которую мы собираемся построить, представляет собой простую схему, с принципом работы на ШИМ-управлении , на основе уже известного генератора LM555 и с супер доступной ценой на рынке. Это регулятор широтной модуляции, которым можно управлять с помощью потенциометра, подстроечного потенциометра или даже с помощью постоянных резисторов, это зависит от вашего проекта. Управление скоростьюСуществует несколько методов, используемых для управления скоростью двигателя, из-за спроса на тысячи приложений в промышленности возникла острая потребность в контроле этих скоростей. Давным-давно, когда не существовало технологии электрического регулирования скорости, промышленное оборудование изменяло или регулировало скорость механически, с помощью шаговых шкивов, переключающих передач, вариатора фрикционной муфты и других механических устройств. Электрическое регулирование скорости имеет много преимуществ как с экономической, так и с технической точки зрения по сравнению с механическим регулированием скорости. Регулятор скорости моторных приводов в зависимости от их типа. Некоторым приводам требуется непрерывное изменение скорости во всем диапазоне от нуля до максимальной скорости, другим требуется часть этого диапазона, а третьим могут потребоваться две или более фиксированные скорости. Как работает ШИМ Широтно-импульсная модуляция Управление работает за счет очень быстрого включения и выключения питания, подаваемого на двигатель. Напряжение постоянного тока преобразуется в сигнал прямоугольной формы, чередующийся между полным включением ( Макс. В пост. тока ) и нулем, что дает двигателю серию « импульсов » мощности. Широтно-импульсная модуляция (ШИМ ) — это метод управления скоростью, который может решить проблему плохого пуска двигателя. ШИМ для управления скоростью двигателя работает почти так же. Вместо того, чтобы подавать на двигатель переменное напряжение, на него подается фиксированное значение напряжения ( Vdc Max ), что приводит к немедленному вращению. Затем напряжение отключается, и двигатель «выбегает». Продолжая этот цикл включения/выключения напряжения с переменным рабочим циклом, можно контролировать скорость двигателя. Как работает схема? U1 подключен как низкочастотный автономный нестабильный мультивибратор с широтно-импульсной модуляцией ( ШИМ ). Компоненты R-C , такие как R1 , ВР1 и С1 определяют частоту колебаний. Когда рычаг стеклоочистителя VR1 находится в верхнем положении, конденсатор C1 заряжается через R1 и D1/D2 и создает серию импульсов на выходе IC с отрицательным и длинным 0 короткие положительные импульсы. Теперь двигатель вращается с высокой скоростью. Выход микросхемы IC на контакте 3 подается на пару транзисторов Q1 и Q2 , которые, в свою очередь, приводят в действие двигатель постоянного тока через высокомощные переключающие МОП-транзисторы Q3-Q6 при выбранной скорость. Резистор R4-R7 ограничивает ток базы силовых транзисторов. Стабилитроны с D4 по D7 являются диодами 15V , они служат для стабилизации базового напряжения МОП-транзисторов, поскольку они очень чувствительны к напряжениям затвора. Диод Д8 , включенный встречно-параллельно с двигателем постоянного тока , ограничивает обратную Э.Д.С. . создается вращением двигателя. Источник питанияСхема управления питается от источника питания, образованного LM317HV IC , этот IC представляет собой регулятор высокого напряжения, который получает напряжение до 60 В и настроен на стабилизированное выходное напряжение для питания схемы управления. Это важно, поскольку LM555 IC поддерживает напряжения до 16 В , а наша схема работает с напряжениями в диапазоне от 12 В до 36 В . Принципиальная схема Принципиальная схема усилителя мощности показана на Рисунок 2 ниже. Он использует 8 выходных силовых транзисторов Mosfet, 4 транзистора для положительного цикла и 4 транзистора для отрицательного цикла.
Components List
Мы предлагаем PCB — Печатная плата, в GERBER, PDF и PNG для тех, кто хочет максимально оптимизировать сборку дома. Если вы предпочитаете в компании, которая разрабатывает плату, вы можете скачать и сделать файлы в опции загрузки ниже.
95 |


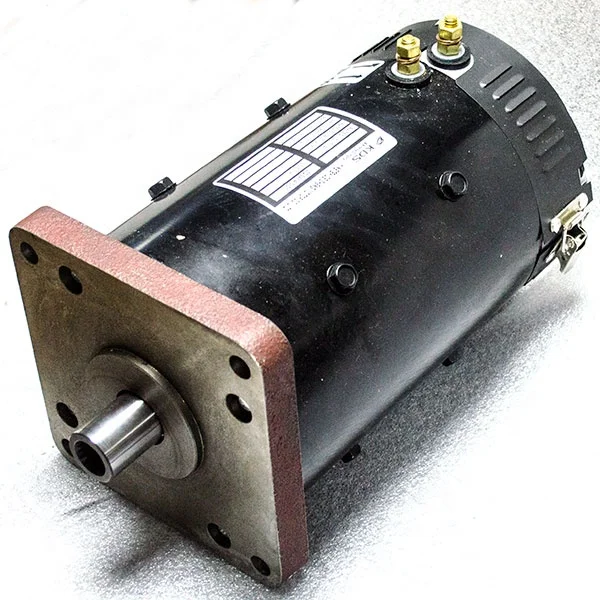


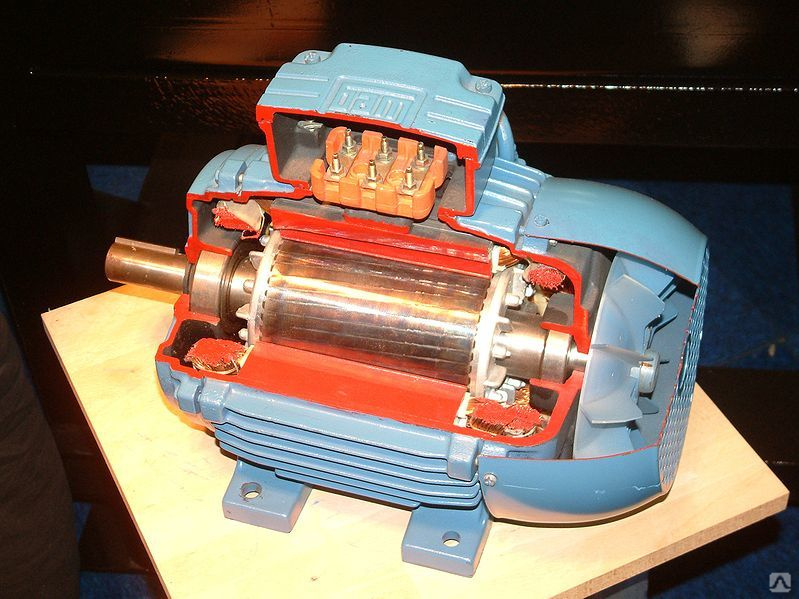 …. ……………….. 10 кОм ( коричневый, черный, оранжевый, золотой )
…. ……………….. 10 кОм ( коричневый, черный, оранжевый, золотой )
.0089
Файлы GERBER, PDF и PNG
Если у вас есть какие-либо вопросы, предложения или исправления, оставьте их в комментариях, и мы ответим на них в ближайшее время.
Подписывайтесь на наш блог!!! Нажмите здесь — elcircuits.com!!!
С наилучшими пожеланиями!!!
Моделирование и оптимальное управление двигателем постоянного тока
Моделирование и оптимальное управление двигателем постоянного тока
| Международный журнал инженерных тенденций и технологий (IJETT) | | |
| © 2016 IJETT Journal | ||
| Том-32 Номер-3 | ||
| Год выпуска: 2016 | ||
| Авторы : Тайфун Абут | ||
DOI: 10. 14445/22315381/IJETT-V32P227 14445/22315381/IJETT-V32P227 |
Цитирование
Тайфун Абут «Моделирование и оптимальное управление двигателем постоянного тока», Международный журнал инженерных тенденций и технологий (IJETT), V32 (3), 146–150, февраль 2016 г. ISSN: 2231-150. 5381. www.jettjournal.org. опубликовано исследовательской группой седьмого чувства. исследования времени и выделение их в алгоритме разработки фаз и предотвращение их. В этом исследовании; показано моделирование, проверка и влияние фильтра Калмана на шумовую среду, а также сравнение характеристик отфильтрованных контроллеров двигателя постоянного тока (DC). Методы линейного квадратичного регулятора (линейно-квадратичного регулятора-LQR) и пропорционально-интегрально-дифференциального (пропорционально-интегрально-дифференциального ПИД) методов оптимального управления использовались для контроля скорости двигателя постоянного тока. К системе двигателя постоянного тока применялись как технологический шум, так и вычислительный шум. Фильтр Калмана был разработан для повышения производительности контроллеров в шумовой среде. Контроллер был разработан в среде MATLAB, и в соответствии с собранными результатами моделирования среды были сопоставлены применяемые методы управления и тщательно изучены результаты.
Фильтр Калмана был разработан для повышения производительности контроллеров в шумовой среде. Контроллер был разработан в среде MATLAB, и в соответствии с собранными результатами моделирования среды были сопоставлены применяемые методы управления и тщательно изучены результаты.
Ссылки
[1] Madani, T., & Benallegue, A. (2006, декабрь). Управление квадрокоптерным мини-вертолетом с помощью полной техники обратного шага. В Decision and Control, 45-я конференция IEEE 2006 г. (стр. 1515–1520). IEEE.
[2] Йенг, К., и Хуанг, Дж. (2003). Разработка лаборатории удаленного доступа: эксперимент по управлению двигателем постоянного тока. Компьютеры в промышленности, 52 (3), 305-311.
[3] Правин, Р. П., Равичандран, М. Х., Ачари, В. С., Радж, В. Дж., Мадху, Г., и Бинду, Г. Р. (2012). Новый бесщелевой бесщеточный двигатель постоянного тока с решеткой Хальбаха для космических аппаратов. Промышленная электроника, транзакции IEEE, 59(9), 3553-3560.
[4] Ли, В. , Сюй, Д., Чжан, В., и Ма, Х. (2007 г., май). Исследование эмуляции ветряной турбины на основе двигателя постоянного тока. In Industrial Electronics and Applications, 2007. ICIEA 2007. 2-я конференция IEEE (стр. 2589-2593). IEEE.
, Сюй, Д., Чжан, В., и Ма, Х. (2007 г., май). Исследование эмуляции ветряной турбины на основе двигателя постоянного тока. In Industrial Electronics and Applications, 2007. ICIEA 2007. 2-я конференция IEEE (стр. 2589-2593). IEEE.
[5] Аунг, В. П. (2007). Анализ моделирования и имитации двигателя постоянного тока и системы его привода, используемого для колесного мобильного робота. Всемирная академия наук, техники и технологий, 32, 299-306.
[6] Охиси, К., Накао, М., Ониши, К., и Миячи, К. (1987). Двигатель постоянного тока с микропроцессорным управлением для нечувствительной к нагрузке сервосистемы положения. IEEE Transactions on Industrial Electronics, (1), 44-49.
[7] Ахмед, А. М., Али-Элдин, А., Элксаси, М. С., и Арид, Ф. Ф. (2015). Бесщеточное управление скоростью двигателя постоянного тока с использованием как ПИ-регулятора, так и нечеткого ПИ-регулятора. Международный журнал компьютерных приложений, 109(10), 29-35.
[8] Н. Прабу и П. Бхаба, «Моделирование стратегии ПИ-регулирования дробного порядка для управления скоростью двигателя постоянного тока на основе метода граничного локуса устойчивости», Международный журнал инженерных тенденций и технологий (IJETT), том 4, выпуск 8, 2013.
[9] Девендер Кумар, Ишан Тхакур, Каника Гупта «Прямое управление крутящим моментом для асинхронного двигателя с использованием технологии интеллектуальной искусственной нейронной сети», Международный журнал новых тенденций и технологий в области компьютерных наук (IJETTCS), том 3, выпуск 4, июль-август 2014 г. , стр: 44-50.
[10] Хамид, В. И., Кадхим, А. С., и Аль-Тувайни, А. К. (2016). Управление ослаблением поля двигателя постоянного тока с независимым возбуждением с использованием нейронной сети, оптимизированной с помощью алгоритма Social Spider. Инженерная, 8(01), 1.
[11] Кассем, А.М.; Юсеф, AM (2009). Управление положением серводвигателя постоянного тока на основе скользящего режима, 5-я Техническая конференция и выставка Саудовской Аравии STCEX 2009, январь 2009 г.
[12] Гаддам Маллешам и Акула Раджани, «АВТОМАТИЧЕСКАЯ НАСТРОЙКА ПИД-РЕГУЛЯТОРА С ИСПОЛЬЗОВАНИЕМ НЕЧЕТКОЙ ЛОГИКИ». 8-я Международная конференция по РАЗРАБОТКЕ И ПРИМЕНЕНИЮ СИСТЕМ Сучава, Румыния, 25 – 27 мая 2006 г.
[13] Ван Сяо-кан, Сунь Чжун-лян, Ванлей, Фэн Дунцин, «Проектирование и исследование на основе нечетких ПИД-параметров самонастраивающегося контроллера с MATLAB, Advanced Computer Theory and Engineering, Международная конференция, стр. 9.96-999, Международная конференция 2008 г. по передовой компьютерной теории и технике, 2008 г.
[14] Абут, Т. «Динамическая модель и оптимальное управление роботом-змеей: TAROBOT–1». Международный журнал научных и технологических исследований. Том 4, Выпуск 11/2015; 4(11):240-248.
[15] С. Вирасурья и М. А. Аль-Шаркави «Идентификация и управление двигателем постоянного тока с использованием нейронных сетей с обратным распространением» IEEE Transactions on Energy Conversion, Vol.6, No.4 pp663-669, декабрь 1991 г.
[16] El -Гаммаль, А. А., и Эль-Самахи, А. А. Оптимальная настройка ПИД-регулятора на приводах двигателя постоянного тока с использованием PSO для оптимизации роя частиц. Международный научный журнал Университета Аль-Азхар (JAUES), ISSN, 1110-6409.
[17] Мешрам, П.М. ве Каноджия, Р.Г., «Настройка ПИД-регулятора с использованием метода Циглера-Николса для управления скоростью двигателя постоянного тока», Международная конференция по достижениям в области инженерии и управления (ICAESM), с: 117-122, 2012
[18] Огата К., «Современная техника управления». Нью-Джерси, Прентис-Холл, 1990.
[19] Астром К. Дж. и Хагглунд Т., «ПИД-регуляторы: теория, проектирование и настройка». Американское общество приборостроения, 2-е издание, 1995 г.
[20] Ziegler, J.B., and Nichols, N.B. (1942), Классическая оригинальная статья: «Оптимальные настройки для автоматических контроллеров», ASME Transactions, v64, стр. 759.-768.
[21] Б. Д. Андерсон и Дж. Б. Мур, «Оптимальное управление: линейно-квадратичные методы», Прентис Холл, Нью-Джерси, 1990.
[22] Назарати, Ю., Пулемотов, А. (2012). MATh5406 (Теория управления) Модуль 6: Линейно-квадратичный регулятор (LQR) и модельное прогнозирующее управление (MPC), 12 сентября.
[23] Ненад Мускиня, Борис Товорник.