|
Навигация:
Топ: Теоретическая значимость работы: Описание теоретической значимости (ценности) результатов исследования должно присутствовать во введении… Устройство и оснащение процедурного кабинета: Решающая роль в обеспечении правильного лечения пациентов отводится процедурной медсестре… Проблема типологии научных революций: Глобальные научные революции и типы научной рациональности…
Интересное: Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным… Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего… Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья.
Дисциплины:
|
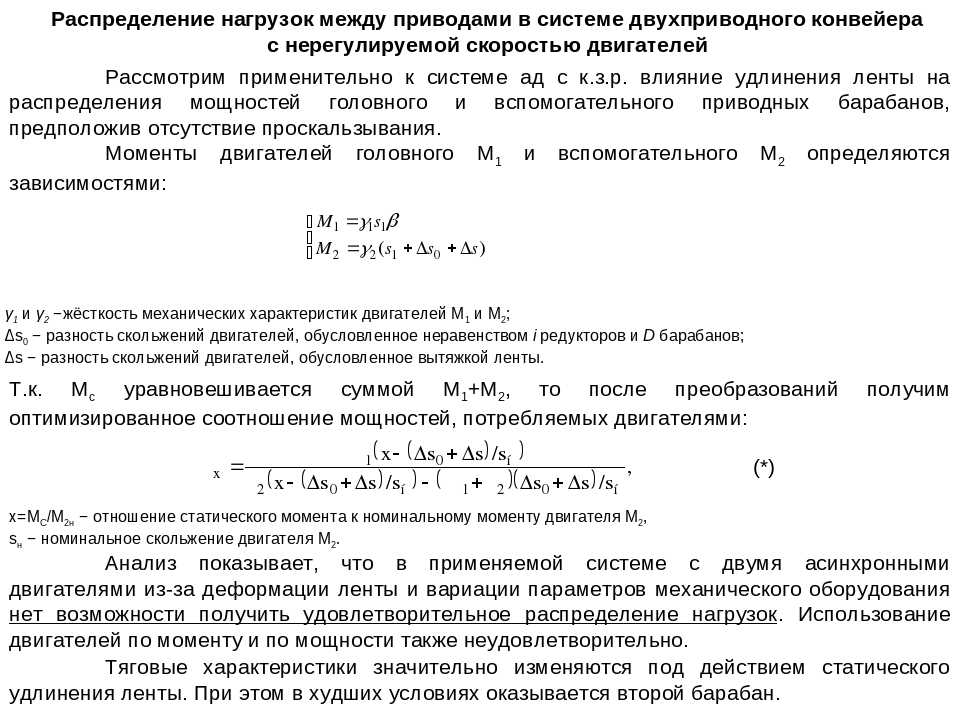
⇐ ПредыдущаяСтр 2 из 2 Отличительный признак асинхронного двигателя состоит в том, что частота вращения ротора n2 меньше синхронной частоты вращения магнитного поля статора n1. Объясняется это тем, что ЭДС в стержнях обмотки ротора индуцируется только при неравенстве частот вращения n2<n1. Частота вращения поля статора относительно ротора определяется частотой скольжения ns=n1-n2. Отставание ротора от вращающегося поля статора характеризуется относительной величиной s, называемой скольжением: , · где s – скольжение асинхронного электродвигателя, · n1 – частота вращения магнитного поля статора, об/мин, · n2 – частота вращения ротора, об/мин, Рассмотрим случай когда частота вращения ротора будет совпадать с частотой вращения магнитного поля статора. В таком случае относительное магнитное поле ротора будет постоянным, таким образом в стержнях ротора не будет создаваться ЭДС, а следовательно и ток. Это значит что сила действующая на ротор будет равна нулю. Таким образом ротор будет замедляться. После чего на стержни ротора опять будет действовать переменное магнитное поле, таким образом будет расти индуцируемый ток и сила. Скольжение асинхронного двигателя может изменяться в диапазоне от 0 до 1, т. е. 0—100%. Если s~0, то это соответствует режиму холостого хода, когда ротор двигателя практически не испытывает противодействующего момента; если s=1 — режиму короткого замыкания, при котором ротор двигателя неподвижен (n2 = 0). Скольжение зависит от механической нагрузки на валу двигателя и с ее ростом увеличивается. Скольжение, соответствующее номинальной нагрузке двигателя, называется номинальным скольжением. Для асинхронных двигателей малой и средней мощности номинальное скольжение изменяется в пределах от 8% до 2%. Преобразование энергии Асинхронный двигатель преобразует электрическую энергию подаваемую на обмотки статора, в механическую (вращение вала ротора). Подключение асинхронного двигателя Трехфазный переменный ток Электрическая сеть трехфазного переменного тока получила наиболее широкое распространение среди электрических систем передачи энергии. Главным преимуществом трехфазной системы по сравнению с однофазной и двухфазной системами является ее экономичность. В трехфазной цепи энергия передается по трем проводам, а токи текущие в разных проводах сдвинуты относительно друг друга по фазе на 120°, при этом синусоидальные ЭДС на разных фазах имеют одинаковую частоту и амплитуду. Звезда и треугольник Трехфазная обмотка статора электродвигателя соединяется по схеме «звезда» или «треугольник» в зависимости от напряжения питания сети. Фазное напряжение — разница потенциалов между началом и концом одной фазы. Другое определение для соединения «звезда»: фазное напряжение это разница потенциалов между линейным проводом и нейтралью (обратите внимание, что у схемы «треугольник» отсутствует нейтраль). Линейное напряжение — разность потенциалов между двумя линейными проводами (между фазами).
Внимание: Несмотря на то, что мощность для соединений в звезду и треугольник вычисляется по одной формуле, подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. Пример: Допустим электродвигатель был подключен по схеме «звезда» к трехфазной сети переменного тока Uл=380 В (соответственно Uф=220 В) и потреблял ток Iл=1 А. Полная потребляемая мощность: S = 1,73∙380∙1 = 658 Вт. Теперь изменим схему соединения на «треугольник», линейное напряжение останется таким же Uл=380 В, а фазовое напряжение увеличится в корень из 3 раз Uф=Uл=380 В. Увеличение фазового напряжения приведет к увеличению фазового тока в корень из 3 раз. Таким образом линейный ток схемы «треугольник» будет в три раза больше линейного тока схемы «звезда». А следовательно и потребляемая мощность будет в 3 раза больше: S = 1,73∙380∙3 = 1975 Вт. Таким образом, если двигатель рассчитан на подключение к трехфазной сети переменного тока по схеме «звезда», подключение данного электродвигателя по схеме «треугольник» может привести к его поломке. Если в нормальном режиме электродвигатель подключен по схеме «треугольник», то для уменьшения пусковых токов на время пуска его можно соединить по схеме звезда. При этом вместе с пусковым током уменьшится также пусковой момент.
⇐ Предыдущая12 Папиллярные узоры пальцев рук — маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни… Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим… Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции… Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого…
|
 ..
..

 В реальности же ротор асинхронного электродвигателя никогда не достигнет скорости вращения магнитного поля статора. Ротор будет вращаться с некоторой скоростью которая немного меньше синхронной скорости.
В реальности же ротор асинхронного электродвигателя никогда не достигнет скорости вращения магнитного поля статора. Ротор будет вращаться с некоторой скоростью которая немного меньше синхронной скорости. Но входная и выходная мощность не равны друг другу так как во время преобразования происходят потери энергии: на трение, нагрев, вихревые токи и потери на гистерезисе. Это энергия рассеивается как тепло. Поэтому асинхронный электродвигатель имеет вентилятор для охлаждения.
Но входная и выходная мощность не равны друг другу так как во время преобразования происходят потери энергии: на трение, нагрев, вихревые токи и потери на гистерезисе. Это энергия рассеивается как тепло. Поэтому асинхронный электродвигатель имеет вентилятор для охлаждения. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя (из двигателя выходит три провода), выведены наружу (выходит шесть проводов), выведены в распределительную коробку (в коробку выходит шесть проводов, из коробки три).
Концы трехфазной обмотки могут быть: соединены внутри электродвигателя (из двигателя выходит три провода), выведены наружу (выходит шесть проводов), выведены в распределительную коробку (в коробку выходит шесть проводов, из коробки три). При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Скольжение асинхронного двигателя
Вызов:
Википедия
Август 18, 2021
Скольжение асинхронного двигателя — относительная разность скоростей вращения ротора и изменения переменного магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах.
Скольжение может измеряться в относительных единицах и в процентах.
Механическая характеристика асинхронной машины: а — режим рекуперации энергии в сеть (генераторный режим), б — двигательный режим, в — режим противовключения (режим электромагнитного тормоза).
s=(n1−n)/n1{\displaystyle s=(n_{1}-n)/n_{1}}
,
гдеn{\displaystyle n}
— скорость вращения ротора асинхронного двигателя, об/мин
n1{\displaystyle n_{1}}
— скорость циклического изменения магнитного потока статора, называется синхронной скоростью двигателя.
n1=60×f/p{\displaystyle n_{1}=60\times f/p}
,
где f — частота сети переменного тока, Гц
p — число пар полюсов обмотки статора (число пар катушек на фазу).
Из последней формулы видно, что скорость вращения двигателя n практически определяется значением его синхронной скорости, а последняя при стандартной частоте 50 Гц зависит от числа пар полюсов: при одной паре полюсов — 3000 об/мин, при двух парах — 1500 об/мин, при трёх парах — 1000 об/мин и т. д.
д.
Содержание
- 1Режим холостого хода
- 2Генераторный режим
- 3Режим торможения противовключением
- 4Критическое скольжение
- 5Литература
Холостой ход асинхронного двигателя подразумевает отсутствие на валу нагрузки в виде рабочего органа или редуктора. В режиме холостого хода скольжение составляет
- s=(n1−n1)/n1=0{\displaystyle s=(n_{1}-n_{1})/n_{1}=0}.
В режиме холостого хода ротор вращается с частотой лишь немного меньшей синхронной частоты вращенияn1{\displaystyle n_{1}} и скольжение весьма мало отличается от нуля.
Следует заметить, что так же существует режим идеального холостого хода, при которомn=n1{\displaystyle n=n_{1}}, что практически реализовать невозможно, даже если учесть отсутствие силы трения в подшипниках. Сам принцип работы двигателя подразумевает отставание ротора от вращающегося магнитного поля статора. Приs=0{\displaystyle s=0} поле статора не пересекает обмотки ротора и не может индуцировать в нём ток, а значит не создаётся магнитное поле ротора
Если обмотку статора включить в сеть, а ротор посредством приводного двигателя вращать в направлении вращения магнитного поля с частотойn>n1{\displaystyle n>n_{1}}, то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора изменит свое направление. Таким образом, в генераторном режиме скольжение может изменяться в диапазоне−∞<s<0{\displaystyle -\infty <s<0}, то есть оно может принимать любые отрицательные значения.
При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора изменит свое направление. Таким образом, в генераторном режиме скольжение может изменяться в диапазоне−∞<s<0{\displaystyle -\infty <s<0}, то есть оно может принимать любые отрицательные значения.
В режиме электромагнитного торможения частота вращения ротора является отрицательной, поэтому скольжение принимает положительные значения больше единицы
- s=[n1−(−n)]/n1=(n1+n)/n1>1{\displaystyle s=[n_{1}-(-n)]/n_{1}=(n_{1}+n)/n_{1}>1}
Таким образом, скольжение в режиме торможения противовключением может изменяться в диапазоне1<s<+∞{\displaystyle 1<s<+\infty }.
Если постепенно повышать нагрузку двигателя, то скольжение будет расти (ротор будет все сильнее отставать от вращающегося магнитного поля), при этом пропорционально скольжению будет расти ток, наводимый в роторе, а пропорционально ему будет расти и момент. Поэтому при малых нагрузках можно считать, что момент пропорционален скольжению. Но при росте скольжения возрастают активные потери в роторе, которые снижают ток ротора, поэтому момент растет медленнее чем скольжение, и при определенном скольжении момент достигает максимума, а потом начинает снижаться. Скольжение, при котором момент достигает максимума, называется критическим.
Но при росте скольжения возрастают активные потери в роторе, которые снижают ток ротора, поэтому момент растет медленнее чем скольжение, и при определенном скольжении момент достигает максимума, а потом начинает снижаться. Скольжение, при котором момент достигает максимума, называется критическим.
- Хомяков Н. М., Денисов В. В., Панов В. А. Электротехника и электрооборудование судов. — Ленинград: Издательство «Судостроение», 1971. — 368 с.
В этой статье или разделе имеется список источников или внешних ссылок, но источники отдельных утверждений остаются неясными из-за отсутствия сносок. Утверждения, не подкреплённые источниками, могут быть поставлены под сомнение и удалены. Вы можете улучшить статью, внеся более точные указания на источники. |
Скольжение, асинхронного, двигателя, Язык, Следить, Править, Текущая, версия, страницы, пока, не, проверялась, опытными, участниками, может, значительно, отличаться, от, версии, проверенной, сентября, 2014, проверки, требуют, правки, относительная, разность, с.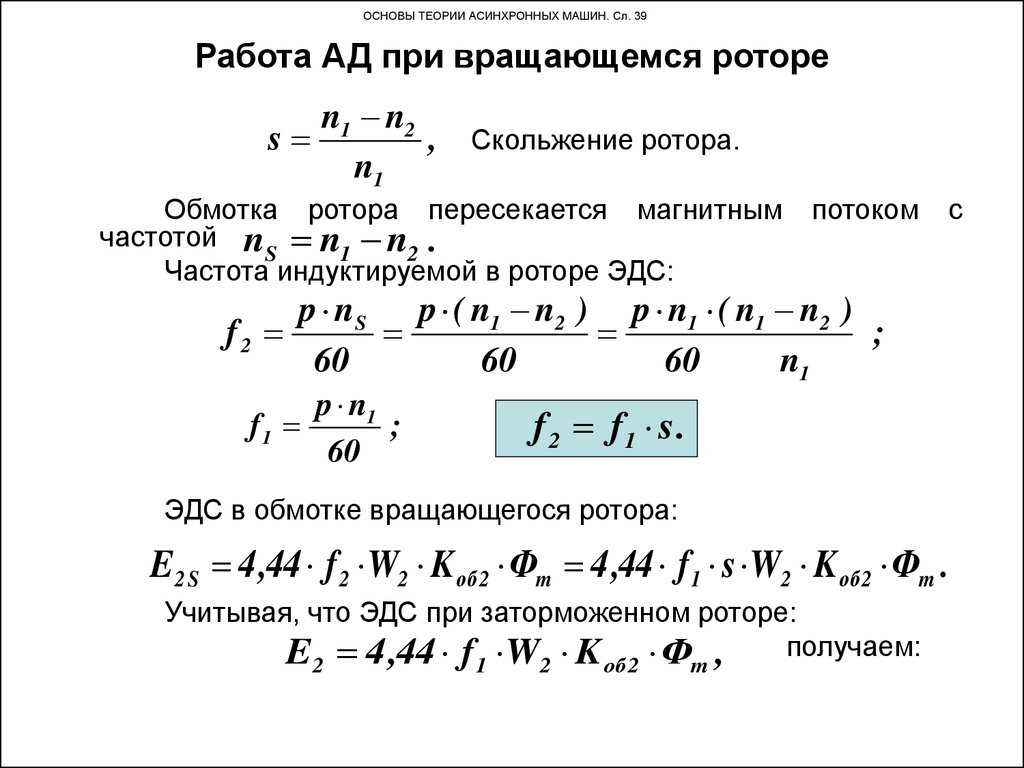 Skolzhenie asinhronnogo dvigatelya Yazyk Sledit Pravit Tekushaya versiya stranicy poka ne proveryalas opytnymi uchastnikami i mozhet znachitelno otlichatsya ot versii proverennoj 1 sentyabrya 2014 proverki trebuyut 23 pravki Skolzhenie asinhronnogo dvigatelya otnositelnaya raznost skorostej vrasheniya rotora i izmeneniya peremennogo magnitnogo potoka sozdavaemogo obmotkami statora dvigatelya peremennogo toka Skolzhenie mozhet izmeryatsya v otnositelnyh edinicah i v procentah Mehanicheskaya harakteristika asinhronnoj mashiny a rezhim rekuperacii energii v set generatornyj rezhim b dvigatelnyj rezhim v rezhim protivovklyucheniya rezhim elektromagnitnogo tormoza s n 1 n n 1 displaystyle s n 1 n n 1 gde n displaystyle n skorost vrasheniya rotora asinhronnogo dvigatelya ob min n 1 displaystyle n 1 skorost ciklicheskogo izmeneniya magnitnogo potoka statora nazyvaetsya sinhronnoj skorostyu dvigatelya n 1 60 f p displaystyle n 1 60 times f p gde f chastota seti peremennogo toka Gc p chislo par polyusov obmotki statora chislo par katushek na fazu Iz poslednej formuly vidno chto skorost vrasheniya dvigatelya n prakticheski opredelyaetsya znacheniem ego sinhronnoj skorosti a poslednyaya pri standartnoj chastote 50 Gc zavisit ot chisla par polyusov pri odnoj pare polyusov 3000 ob min pri dvuh parah 1500 ob min pri tryoh parah 1000 ob min i t d Soderzhanie 1 Rezhim holostogo hoda 2 Generatornyj rezhim 3 Rezhim tormozheniya protivovklyucheniem 4 Kriticheskoe skolzhenie 5 LiteraturaRezhim holostogo hoda PravitHolostoj hod asinhronnogo dvigatelya podrazumevaet otsutstvie na valu nagruzki v vide rabochego organa ili reduktora V rezhime holostogo hoda skolzhenie sostavlyaet s n 1 n 1 n 1 0 displaystyle s n 1 n 1 n 1 0 V rezhime holostogo hoda rotor vrashaetsya s chastotoj lish nemnogo menshej sinhronnoj chastoty vrasheniya n 1 displaystyle n 1 i skolzhenie vesma malo otlichaetsya ot nulya Sleduet zametit chto tak zhe sushestvuet rezhim idealnogo holostogo hoda pri kotorom n n 1 displaystyle n n 1 chto prakticheski realizovat nevozmozhno dazhe esli uchest otsutstvie sily treniya v podshipnikah Sam princip raboty dvigatelya podrazumevaet otstavanie rotora ot vrashayushegosya magnitnogo polya statora Pri s 0 displaystyle s 0 pole statora ne peresekaet obmotki rotora i ne mozhet inducirovat v nyom tok a znachit ne sozdayotsya magnitnoe pole rotoraGeneratornyj rezhim PravitEsli obmotku statora vklyuchit v set a rotor posredstvom privodnogo dvigatelya vrashat v napravlenii vrasheniya magnitnogo polya s chastotoj n gt n 1 displaystyle n gt n 1 to napravlenie dvizheniya rotora otnositelno polya statora izmenitsya na obratnoe po sravneniyu s dvigatelnym rezhimom tak kak rotor budet obgonyat pole statora Pri etom skolzhenie stanet otricatelnym a EDS navedennaya v obmotke rotora izmenit svoe napravlenie Takim obrazom v generatornom rezhime skolzhenie mozhet izmenyatsya v diapazone lt s lt 0 displaystyle infty lt s lt 0 to est ono mozhet prinimat lyubye otricatelnye znacheniya Rezhim tormozheniya protivovklyucheniem PravitV rezhime elektromagnitnogo tormozheniya chastota vrasheniya rotora yavlyaetsya otricatelnoj poetomu skolzhenie prinimaet polozhitelnye znacheniya bolshe edinicy s n 1 n n 1 n 1 n n 1 gt 1 displaystyle s n 1 n n 1 n 1 n n 1 gt 1 Takim obrazom skolzhenie v rezhime tormozheniya protivovklyucheniem mozhet izmenyatsya v diapazone 1 lt s lt displaystyle 1 lt s lt infty Kriticheskoe skolzhenie PravitEsli postepenno povyshat nagruzku dvigatelya to skolzhenie budet rasti rotor budet vse silnee otstavat ot vrashayushegosya magnitnogo polya pri etom proporcionalno skolzheniyu budet rasti tok navodimyj v rotore a proporcionalno emu budet rasti i moment Poetomu pri malyh nagruzkah mozhno schitat chto moment proporcionalen skolzheniyu No pri roste skolzheniya vozrastayut aktivnye poteri v rotore kotorye snizhayut tok rotora poetomu moment rastet medlennee chem skolzhenie i pri opredelennom skolzhenii moment dostigaet maksimuma a potom nachinaet snizhatsya Skolzhenie pri kotorom moment dostigaet maksimuma nazyvaetsya kriticheskim Literatura PravitHomyakov N M Denisov V V Panov V A Elektrotehnika i elektrooborudovanie sudov Leningrad Izdatelstvo Sudostroenie 1971 368 s V etoj state ili razdele imeetsya spisok istochnikov ili vneshnih ssylok no istochniki otdelnyh utverzhdenij ostayutsya neyasnymi iz za otsutstviya snosok Utverzhdeniya ne podkreplyonnye istochnikami mogut byt postavleny pod somnenie i udaleny Vy mozhete uluchshit statyu vnesya bolee tochnye ukazaniya na istochniki Istochnik https ru wikipedia org w index php title Skolzhenie asinhronnogo dvigatelya amp oldid 112828477, Википедия, чтение, книга, библиотека, поиск, нажмите,
Skolzhenie asinhronnogo dvigatelya Yazyk Sledit Pravit Tekushaya versiya stranicy poka ne proveryalas opytnymi uchastnikami i mozhet znachitelno otlichatsya ot versii proverennoj 1 sentyabrya 2014 proverki trebuyut 23 pravki Skolzhenie asinhronnogo dvigatelya otnositelnaya raznost skorostej vrasheniya rotora i izmeneniya peremennogo magnitnogo potoka sozdavaemogo obmotkami statora dvigatelya peremennogo toka Skolzhenie mozhet izmeryatsya v otnositelnyh edinicah i v procentah Mehanicheskaya harakteristika asinhronnoj mashiny a rezhim rekuperacii energii v set generatornyj rezhim b dvigatelnyj rezhim v rezhim protivovklyucheniya rezhim elektromagnitnogo tormoza s n 1 n n 1 displaystyle s n 1 n n 1 gde n displaystyle n skorost vrasheniya rotora asinhronnogo dvigatelya ob min n 1 displaystyle n 1 skorost ciklicheskogo izmeneniya magnitnogo potoka statora nazyvaetsya sinhronnoj skorostyu dvigatelya n 1 60 f p displaystyle n 1 60 times f p gde f chastota seti peremennogo toka Gc p chislo par polyusov obmotki statora chislo par katushek na fazu Iz poslednej formuly vidno chto skorost vrasheniya dvigatelya n prakticheski opredelyaetsya znacheniem ego sinhronnoj skorosti a poslednyaya pri standartnoj chastote 50 Gc zavisit ot chisla par polyusov pri odnoj pare polyusov 3000 ob min pri dvuh parah 1500 ob min pri tryoh parah 1000 ob min i t d Soderzhanie 1 Rezhim holostogo hoda 2 Generatornyj rezhim 3 Rezhim tormozheniya protivovklyucheniem 4 Kriticheskoe skolzhenie 5 LiteraturaRezhim holostogo hoda PravitHolostoj hod asinhronnogo dvigatelya podrazumevaet otsutstvie na valu nagruzki v vide rabochego organa ili reduktora V rezhime holostogo hoda skolzhenie sostavlyaet s n 1 n 1 n 1 0 displaystyle s n 1 n 1 n 1 0 V rezhime holostogo hoda rotor vrashaetsya s chastotoj lish nemnogo menshej sinhronnoj chastoty vrasheniya n 1 displaystyle n 1 i skolzhenie vesma malo otlichaetsya ot nulya Sleduet zametit chto tak zhe sushestvuet rezhim idealnogo holostogo hoda pri kotorom n n 1 displaystyle n n 1 chto prakticheski realizovat nevozmozhno dazhe esli uchest otsutstvie sily treniya v podshipnikah Sam princip raboty dvigatelya podrazumevaet otstavanie rotora ot vrashayushegosya magnitnogo polya statora Pri s 0 displaystyle s 0 pole statora ne peresekaet obmotki rotora i ne mozhet inducirovat v nyom tok a znachit ne sozdayotsya magnitnoe pole rotoraGeneratornyj rezhim PravitEsli obmotku statora vklyuchit v set a rotor posredstvom privodnogo dvigatelya vrashat v napravlenii vrasheniya magnitnogo polya s chastotoj n gt n 1 displaystyle n gt n 1 to napravlenie dvizheniya rotora otnositelno polya statora izmenitsya na obratnoe po sravneniyu s dvigatelnym rezhimom tak kak rotor budet obgonyat pole statora Pri etom skolzhenie stanet otricatelnym a EDS navedennaya v obmotke rotora izmenit svoe napravlenie Takim obrazom v generatornom rezhime skolzhenie mozhet izmenyatsya v diapazone lt s lt 0 displaystyle infty lt s lt 0 to est ono mozhet prinimat lyubye otricatelnye znacheniya Rezhim tormozheniya protivovklyucheniem PravitV rezhime elektromagnitnogo tormozheniya chastota vrasheniya rotora yavlyaetsya otricatelnoj poetomu skolzhenie prinimaet polozhitelnye znacheniya bolshe edinicy s n 1 n n 1 n 1 n n 1 gt 1 displaystyle s n 1 n n 1 n 1 n n 1 gt 1 Takim obrazom skolzhenie v rezhime tormozheniya protivovklyucheniem mozhet izmenyatsya v diapazone 1 lt s lt displaystyle 1 lt s lt infty Kriticheskoe skolzhenie PravitEsli postepenno povyshat nagruzku dvigatelya to skolzhenie budet rasti rotor budet vse silnee otstavat ot vrashayushegosya magnitnogo polya pri etom proporcionalno skolzheniyu budet rasti tok navodimyj v rotore a proporcionalno emu budet rasti i moment Poetomu pri malyh nagruzkah mozhno schitat chto moment proporcionalen skolzheniyu No pri roste skolzheniya vozrastayut aktivnye poteri v rotore kotorye snizhayut tok rotora poetomu moment rastet medlennee chem skolzhenie i pri opredelennom skolzhenii moment dostigaet maksimuma a potom nachinaet snizhatsya Skolzhenie pri kotorom moment dostigaet maksimuma nazyvaetsya kriticheskim Literatura PravitHomyakov N M Denisov V V Panov V A Elektrotehnika i elektrooborudovanie sudov Leningrad Izdatelstvo Sudostroenie 1971 368 s V etoj state ili razdele imeetsya spisok istochnikov ili vneshnih ssylok no istochniki otdelnyh utverzhdenij ostayutsya neyasnymi iz za otsutstviya snosok Utverzhdeniya ne podkreplyonnye istochnikami mogut byt postavleny pod somnenie i udaleny Vy mozhete uluchshit statyu vnesya bolee tochnye ukazaniya na istochniki Istochnik https ru wikipedia org w index php title Skolzhenie asinhronnogo dvigatelya amp oldid 112828477, Википедия, чтение, книга, библиотека, поиск, нажмите,
истории
, книги, статьи, wikipedia, учить, информация, история, секс, порно, скачать, скачать, sex, seks, porn, porno, скачать, бесплатно, скачать бесплатно, mp3, видео, mp4, 3gp, jpg, jpeg, gif, png, картинка, музыка, песня, фильм, игра, игры
20.
 Скольжение асинхронного двигателя. Реверсирование асинхронного двигателя.
Скольжение асинхронного двигателя. Реверсирование асинхронного двигателя.
В
предыдущем разделе было показано, что
скорость вращения магнитного поля
определяется частотой переменного
тока. В частности, если трехфазную
обмотку двигателя разместить в шести
пазах на внутренней поверхности статора
(рис. 8.5), то за половину периода переменного
тока вектор магнитной индукции сделает
пол-оборота, а за полный период —
один оборот. В этом случае обмотка
статора создает магнитное поле с одной
парой полюсов и называется двухполюсной.
Если
обмотка статора состоит из шести катушек
(по две последовательно соединенные
катушки на каждую фазу), размещенных
в двенадцати пазах, то за половину
периода переменного тока вектор
магнитной индукции повернется на
четверть оборота, а за полный период
— на пол-оборота. Вместо двух полюсов
на трех обмотках теперь магнитное поле
статора имеет четыре полюса (две пары
полюсов).
Таким
образом, если обмотка статора имеет 2,
3, 4 и т.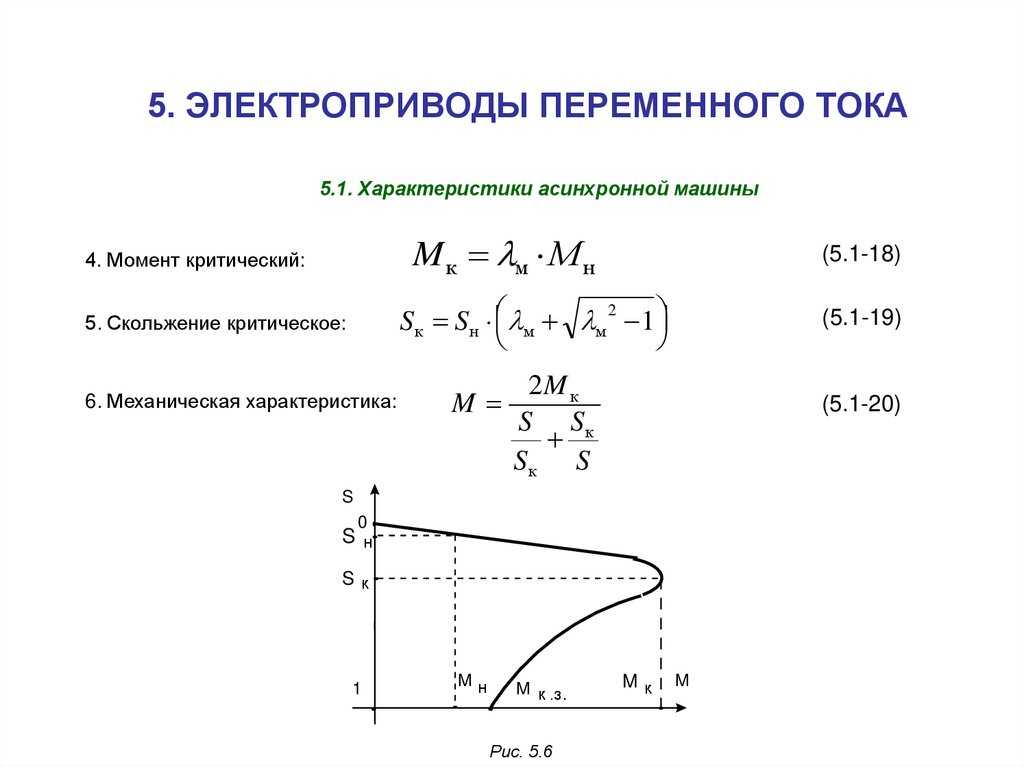 д. пары полюсов, то вектор магнитной
д. пары полюсов, то вектор магнитной
индукции за время одного периода
изменения тока повернется соответственно
на 1/2, 1/3, 1/4 и т.д. часть окружности статора.
В общем случае,
обозначив
буквой р
число
пар полюсов, мы можем сделать вывод, что
угол, описанный вектором магнитной
индукции за время одного периода
изменения тока, равен одной р-й
части
окружности статора и, следовательно,
скорость вращения магнитного поля
пх
обратно
пропорциональна числу пар полюсов:
Поскольку
число пар полюсов может быть только
целым, то скорость вращения магнитного
поля может принимать не произвольные,
а только определенные значения:
р | 1 | 2 | 3 | 4 | 5 | 6 | 8 | 12 | 24 |
3000 | 1500 | 1000 | 750 | 600 | 500 | 375 | 250 | 125 |
Ротор
асинхронного двигателя вращается в ту
же сторону, что и магнитное поле, со
скоростью, несколько меньшей скорости
вращения магнитного поля, так как только
в этом случае в обмотке ротора будут
индуцироваться ЭДС и токи и на ротор
будет действовать вращающий момент.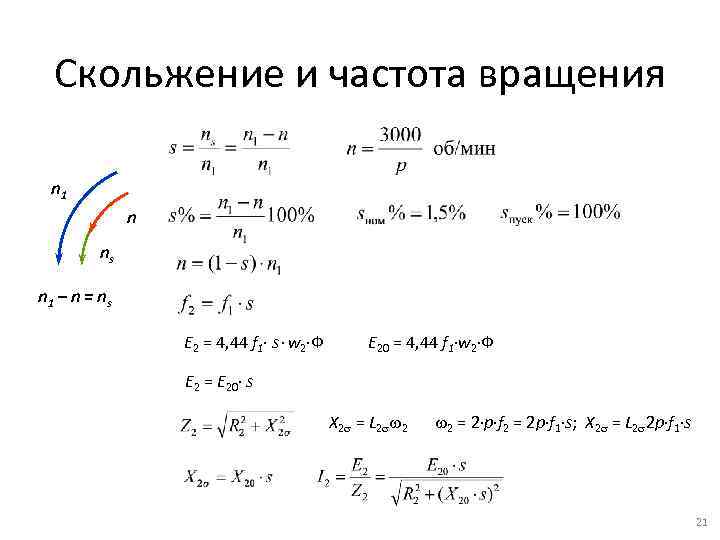
Обозначим скорость вращения ротора
п2.
Тогда величина п1
—
п2,
которая
называется
скоростью
скольжения, представляет
собой относительную скорость
магнитного поля и ротора, а степень
отставания ротора от магнитного
поля, выраженная в процентах, называется
скольжением
s:Скольжение
асинхронного двигателя при номинальной
нагрузке обычно составляет 3-7 %.
При увеличении нагрузки скольжение
увеличивается и двигатель может
остановиться.
Вращающий
момент М
асинхронного
двигателя создается благодаря
взаимодействию магнитного потока поля
статора ф
с
индуцированным в обмотке ротора током
I2,
поэтому
величина
его пропорциональна произведению 12Ф
.
Так
как в механическую работу на валу
двигателя может превращаться только
активная мощность, то вращающий момент
будет создаваться активной составляющей
тока.
Двигатель
будет работать устойчиво, с постоянной
скоростью ротора при равновесии моментов,
т. е. тогда, когда вращающий момент Мвр
равен
тормозному моменту на валу двигателя
Мтор:
Любой
нагрузке машины соответствует определенное
число оборотов ротора п2
и
определенное скольжение s.
Магнитное
поле статора вращается относительно
ротора
со
скоростью п1-п2
И
индуцирует
в его обмотке ЭДС Е2,
под
действием
которой по замкнутой обмотке ротора
протекает ток 12
Если
нагрузка на валу двигателя увеличилась,
т. е. увеличился тормозной момент, то
равновесие моментов будет нарушено.
Это приведет к уменьшению числа оборотов
ротора, т. е. к увеличению скольжения. С
увеличением скольжения
магнитное
поле статора чаще пересекает проводники
обмотки ротора и индуцированная в
обмотке ротора ЭДС Е2
возрастает,
а следовательно, увеличивается ток в
роторе и развиваемый двигателем
вращающий момент.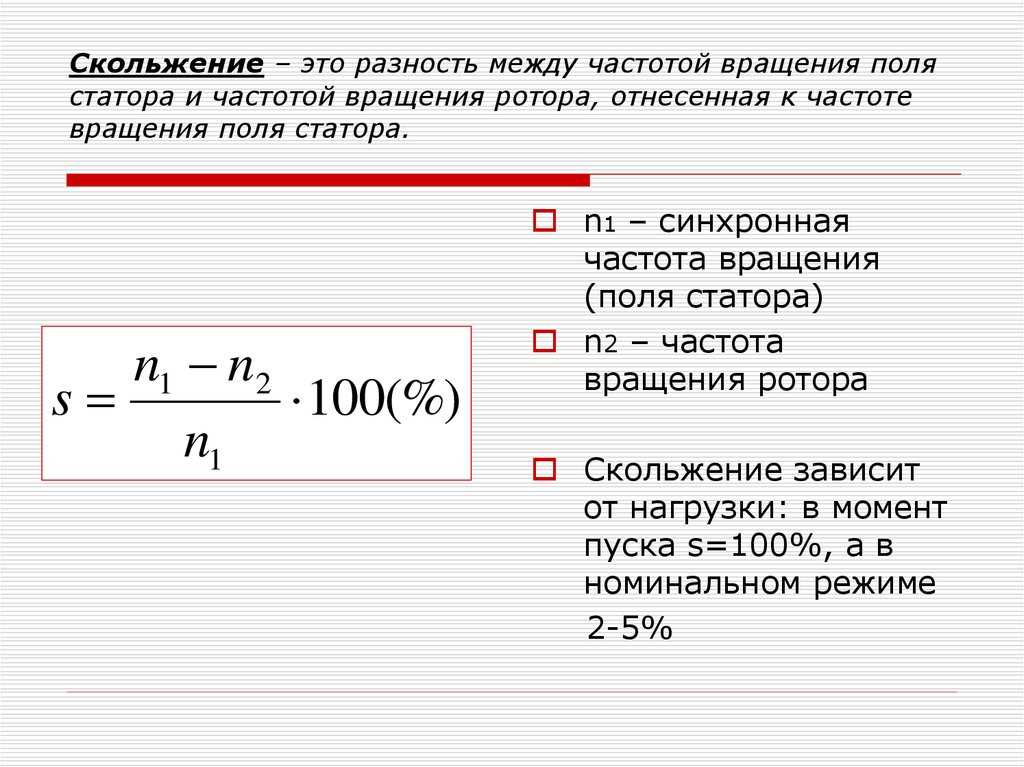 Увеличение скольжения
Увеличение скольжения
и тока в роторе будет происходить до
тех пор, пока не наступит равновесие
моментов, т. е. вращающий момент не станет
равен тормозному.
Аналогично
протекает процесс изменения числа
оборотов ротора и развиваемого момента
при уменьшении нагрузки двигателя. При
уменьшении нагрузки на валу двигателя
тормозной момент станет меньше
вращающего, что приведет к увеличению
числа оборотов ротора, т. е. к уменьшению
скольжения. С
уменьшением скольжения уменьшаются
ЭДС и ток в обмотке ротора и, следовательно,
вращающий момент уменьшается до значения,
равного тормозному.
Реверсирование
— это изменение направления вращения
ротора двигателя. Как
известно, направление вращения ротора
зависит от направления вращения
магнитного поля статора, поэтому для
изменения направления вращения ротора
следует изменить последовательность
фаз (см. разд. 8.3). На практике это
осуществляется
путем перемены мест любых двух фаз.
Для этого часто используют трехполюсные
переключатели (рис.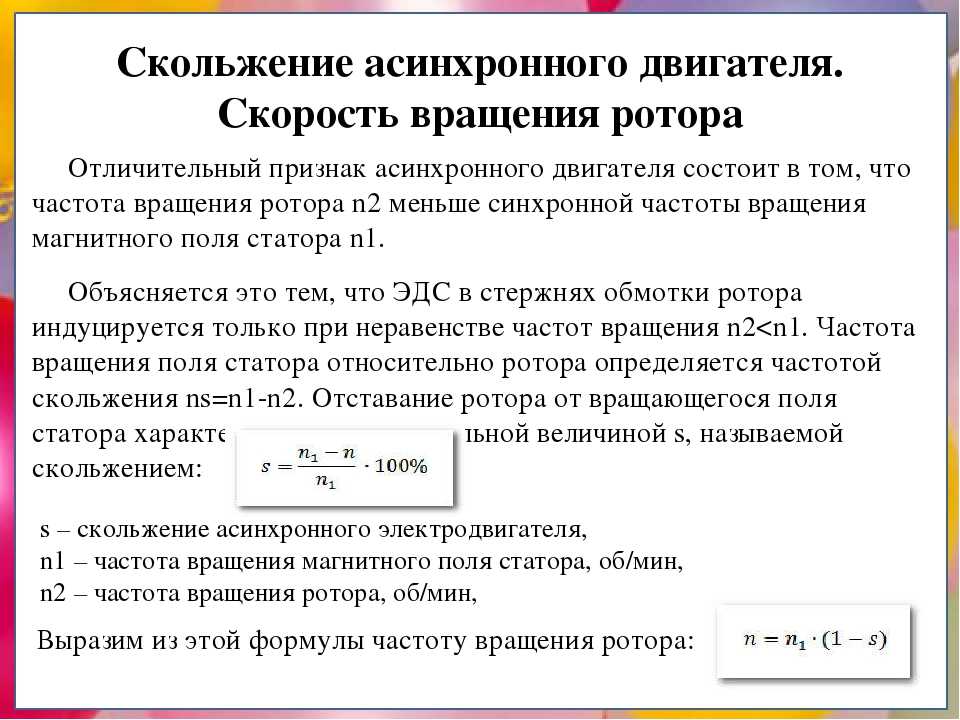 8.12):
8.12):
Проскальзывание асинхронного двигателя — руководство по электротехнике
Привет, друзья, в этой статье я описываю важность скольжения в асинхронном двигателе и надеюсь, что вы найдете ее информативной и полезной.
В асинхронном двигателе ротор всегда вращается со скоростью меньше синхронной скорости. Разница между скоростью вращения ротора (N) и скоростью вращающегося магнитного потока (N s ) называется скольжением. Скольжение асинхронного двигателя обычно выражается в процентах от синхронной скорости (N s ) и представлен символом s .
Математически, процентное скольжение, % s = [(N с – N)/N с ] x 100
или дробное скольжение, s = (N с – N)/N 5 0 0 9 0 0 9 с 900 Разница между синхронной скоростью и скоростью вращения ротора называется скоростью скольжения
, т. е. скорость скольжения = N с – N
. большие моторы.
большие моторы.
Проскальзывание асинхронного двигателя играет важную роль в работе асинхронного двигателя. Крутящий момент, создаваемый асинхронным двигателем, прямо пропорционален скольжению асинхронного двигателя. На холостом ходу асинхронному двигателю требуется небольшой крутящий момент для компенсации потерь на трение, железа и других потерь, поэтому скольжение мало.
Когда двигатель нагружен, для привода нагрузки требуется больший крутящий момент, поэтому скольжение увеличивается, а скорость вращения ротора немного снижается. Таким образом, скольжение асинхронного двигателя настраивается на такое значение, чтобы соответствовать требуемому крутящему моменту.
В состоянии покоя N = 0, следовательно, s = 1, тогда как при N = N s , s = 0 (воображаемое состояние).
ЭДС индукции в роторе
E 2r = sE 2
Где E 2 = ЭДС индукции на фазу в состоянии покоя.
E 2r = ЭДС ротора на фазу в рабочем состоянии.
В состоянии покоя s = 1, следовательно, E 2r = E 2 тогда как при N = N s , s = 0, E 2r = 0,
Таким образом, ЭДС ротора колеблется между 0 и E 2 для скоростей ротора между N = N с и N = 0.
Частота ЭДС индуцирования в роторе равно:
f r = sf 1
т.е. частота ЭДС ротора = дробное скольжение x частота питания асинхронный двигатель такой же, как частота питания и уменьшается с увеличением скорости (из-за уменьшения скольжения).
Сопротивление ротора
Частота ЭДС, индуцированная ротором, не влияет на его сопротивление. Следовательно, сопротивление ротора остается постоянным независимо от скорости асинхронного двигателя.
Реактивное сопротивление ротора
Пусть X 2 будет реактивным сопротивлением ротора на фазу в состоянии покоя . Частота ротора в состоянии покоя равна f r = f 1 .
Частота ротора в состоянии покоя равна f r = f 1 .
Следовательно, X 2 = 2πf 1 L 2 Ом/фаза
В рабочем состоянии частота напряжения ротора равна f r = sf 1 . Следовательно, реактивное сопротивление ротора в рабочем состоянии x 2R определяется как,
x 2R = 2πf R L 2 = 2πsf 1 L 2 = S (2πf 1 L 2 ) = sX 2
X 2r = sX 2 .
В состоянии покоя скольжение асинхронного двигателя s равно 1, следовательно, реактивное сопротивление ротора асинхронного двигателя равно реактивному сопротивлению ротора в состоянии покоя и уменьшается с увеличением скорости (из-за уменьшения скольжения).
Импеданс ротора
Импеданс ротора на фазу при стойке установлена,
Z 2 = (R 2 2 + x 2 2 ) 3 10008 2 2 ) 3 10008 2 2 ) 3 10008 2 2 ) 3 10008 2 2 ) 1.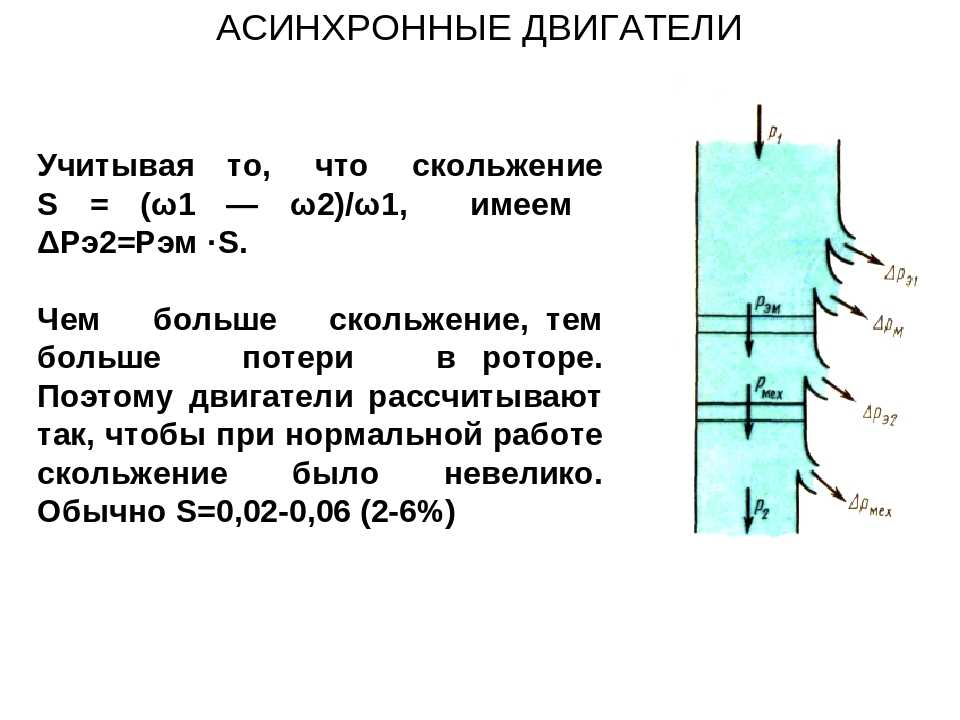 293 2 2 ) + x 2 2 ) + x 2 2 ) /Фаза
293 2 2 ) + x 2 2 ) + x 2 2 ) /Фаза
Импеданс ротора на фазу при условии выполнения,
Z 2R = (R 2 2 + SX 2 2 ) 1/2 OHM/FASH
) Где R 2 = сопротивление ротора на фазу
X 2 = реактивное сопротивление обмотки ротора на фазу в состоянии покоя.
Коэффициент мощности ротора
В Standstill коэффициент мощности ротора дается,
COS φ R = R 2 /Z 2 = R 2 /(R 2 2 + + + X 2 2 ) 1/2
В рабочем состоянии коэффициент мощности ротора определяется как0008 2 /[R 2 2 + (sX 2 ) 2 ] 1/2
Спасибо, что прочитали о значении скольжения в асинхронном двигателе.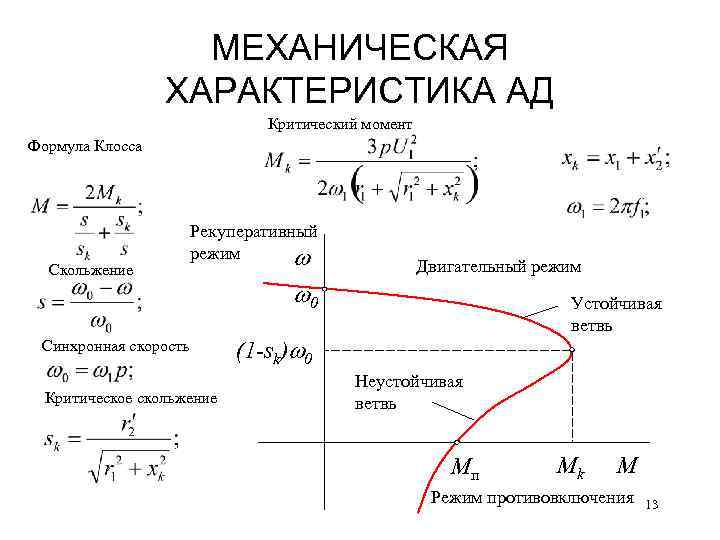
Трехфазный асинхронный двигатель | Все сообщения
- Конструкция трехфазного асинхронного двигателя
- Вращающееся магнитное поле в трехфазном асинхронном двигателе
- Принцип работы трехфазного асинхронного двигателя
- Формула крутящего момента для асинхронного двигателя
- Характеристики проскальзывания крутящего момента асинхронного двигателя
- Потери в асинхронном двигателе
- Испытания асинхронных двигателей
- Методы запуска асинхронного двигателя
- Двойной асинхронный двигатель с короткозамкнутым ротором
- Регулятор скорости трехфазного асинхронного двигателя
- Что такое частотно-регулируемый привод?
- Принцип работы стартера автотрансформатора
- Тепловое реле перегрузки работает
- Эквивалентная схема асинхронного двигателя
- Линейный асинхронный двигатель | Приложения
© //www.yourelectricalguide. com/ значение скольжения в асинхронном двигателе.
com/ значение скольжения в асинхронном двигателе.
Характеристики момента-скольжения и момента-скорости асинхронного двигателя
Двигатели
Электрические технологии
2 4 минуты чтения
Характеристики крутящего момента, скорости и скольжения асинхронного двигателя
Содержание
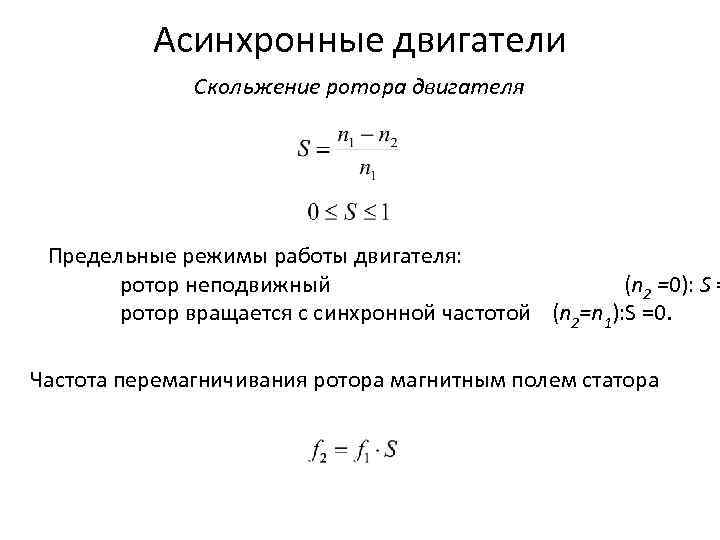
Характеристики скольжения 0004 Характеристики крутящего момента и скольжения определяют соотношение между крутящим моментом и скольжением. Характеристики проскальзывания крутящего момента показывают, как изменяется крутящий момент при изменении проскальзывания. Скольжение определяется как отношение синхронной скорости к фактической скорости ротора. Фактическая скорость ротора зависит от условий нагрузки. Следовательно, скольжение изменяется в зависимости от условий нагрузки. В предыдущей статье мы вывели уравнение крутящего момента асинхронного двигателя.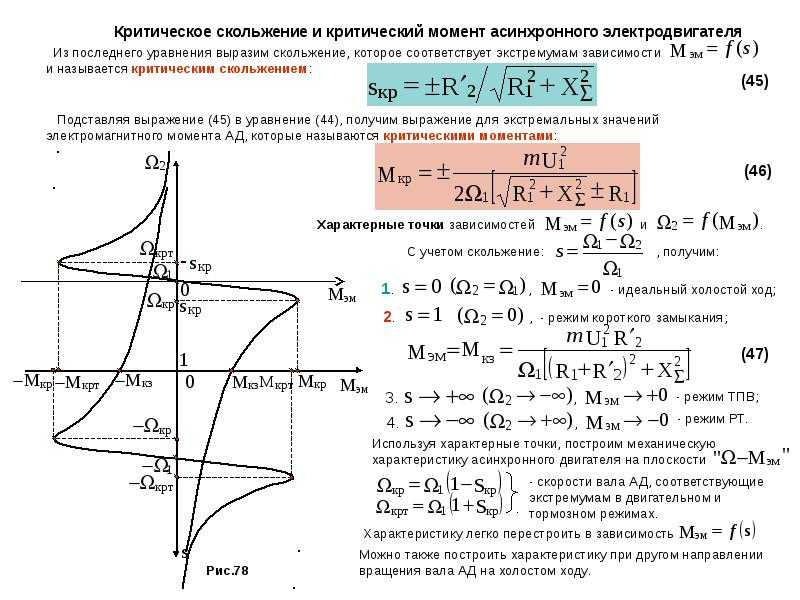
Из приведенного выше уравнения, если R 2 и X 20 остаются постоянными, крутящий момент зависит от скольжения. Кривая характеристики момента-пробуксовки выглядит как прямоугольная гипербола. И эта кривая делится на три области;
- Область низкого скольжения
- Область среднего скольжения
- Область высокого скольжения
Кривая характеристики момента-пробуксовки для различных значений сопротивления ротора показана на рисунке ниже.
Связанный пост:
- Уравнение крутящего момента асинхронного двигателя
- Эквивалентная схема асинхронного двигателя
Низкий Область скольжения
При синхронной скорости скольжение асинхронного двигателя равно нулю. Следовательно, вращающий момент, развиваемый в роторе, равен нулю. Поэтому асинхронный двигатель всегда работает немного меньше синхронной скорости. И в этом состоянии проскальзывание очень низкое.
Поэтому асинхронный двигатель всегда работает немного меньше синхронной скорости. И в этом состоянии проскальзывание очень низкое.
При очень низком скольжении (sX 20 ) 2 незначителен по сравнению с R 2 . Итак, для условий малого скольжения
Если мы считаем сопротивление ротора R 2 постоянным;
T ∝ s
Следовательно, в условиях малого скольжения крутящий момент прямо пропорционален скольжению. Это нормальная рабочая область для асинхронного двигателя. В области малого скольжения кривая крутящего момента представляет собой прямую линию.
Область среднего скольжения
При увеличении нагрузки скорость асинхронного двигателя снижается, а скольжение увеличивается. По мере увеличения скольжения член (sX 20 ) 2 становится большим по сравнению с сопротивлением ротора R 2 . И в этом условии можно пренебречь сопротивлением ротора R 2 .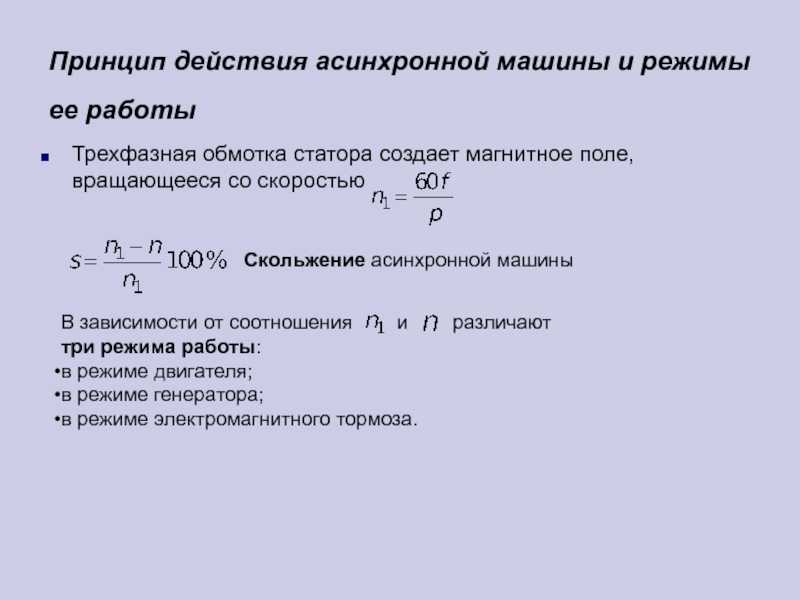
Итак, крутящий момент обратно пропорционален скольжению. В этой области кривая образует прямоугольную гиперболу и проходит через точку максимального крутящего момента. Максимальный крутящий момент достигается, когда R 2 = sX 20 . Этот крутящий момент известен как момент отрыва или крутящий момент опрокидывания.
Область высокого скольжения
Если мы увеличим крутящий момент выше точки максимального крутящего момента, крутящий момент начнет уменьшаться. Это состояние при увеличении нагрузки. В этом состоянии скорость двигателя снижается, и необходимо активировать защиту от перегрузки, чтобы отключить двигатель от источника питания. Если двигатель постоянно работает в этой области, двигатель выйдет из строя из-за перегрева. Эта область на кривой крутящего момента-проскальзывания является убывающей областью после точки максимального крутящего момента.
Обычно асинхронный двигатель работает при значении скольжения от нуля до S M . Проскальзывание S M — это проскальзывание в точке максимального крутящего момента. Момент выдергивания асинхронного двигателя в 2–3 раза превышает номинальный момент при полной нагрузке для типичной работы. Таким образом, двигатель может выдерживать кратковременную перегрузку без остановки.
Проскальзывание S M — это проскальзывание в точке максимального крутящего момента. Момент выдергивания асинхронного двигателя в 2–3 раза превышает номинальный момент при полной нагрузке для типичной работы. Таким образом, двигатель может выдерживать кратковременную перегрузку без остановки.
Кривая проскальзывания крутящего момента асинхронного двигателя при постоянном сопротивлении ротора показана на рисунке ниже.
Как и в предыдущем описании, эта кривая также разделена на три части;
- Автомобильный регион
- Генерирующая область
- Область разрыва
Автомобильный регион
В этом режиме работы скольжение асинхронного двигателя составляет от нуля до единицы. Когда на статор подается электроэнергия, ротор вращается ниже синхронной скорости. И крутящий момент двигателя изменяется от нуля до крутящего момента при полной нагрузке, а скольжение изменяется от нуля до единицы.
В этом состоянии крутящий момент прямо пропорционален скольжению. Как правило, в этой области работает асинхронный двигатель. Проскальзывание равно нулю на синхронной скорости и равно единице в состоянии покоя.
Как правило, в этой области работает асинхронный двигатель. Проскальзывание равно нулю на синхронной скорости и равно единице в состоянии покоя.
Область генерации
В режиме генерации асинхронный двигатель работает со скоростью выше синхронной и ведет себя как асинхронный генератор. Скорость двигателя увеличивается выше синхронной скорости с помощью внешних устройств, таких как первичный двигатель.
В области генерации и скольжение, и крутящий момент отрицательны. Следовательно, машины получают механическую энергию и отдают электрическую энергию. Во время генерации двигатель должен подавать реактивную электроэнергию.
Область торможения
В области торможения меняется полярность напряжения питания. Следовательно, двигатель вращается в обратном направлении. Этот режим используется для остановки двигателя. Этот метод электрического торможения известен как подключение. В режиме торможения скольжение больше единицы.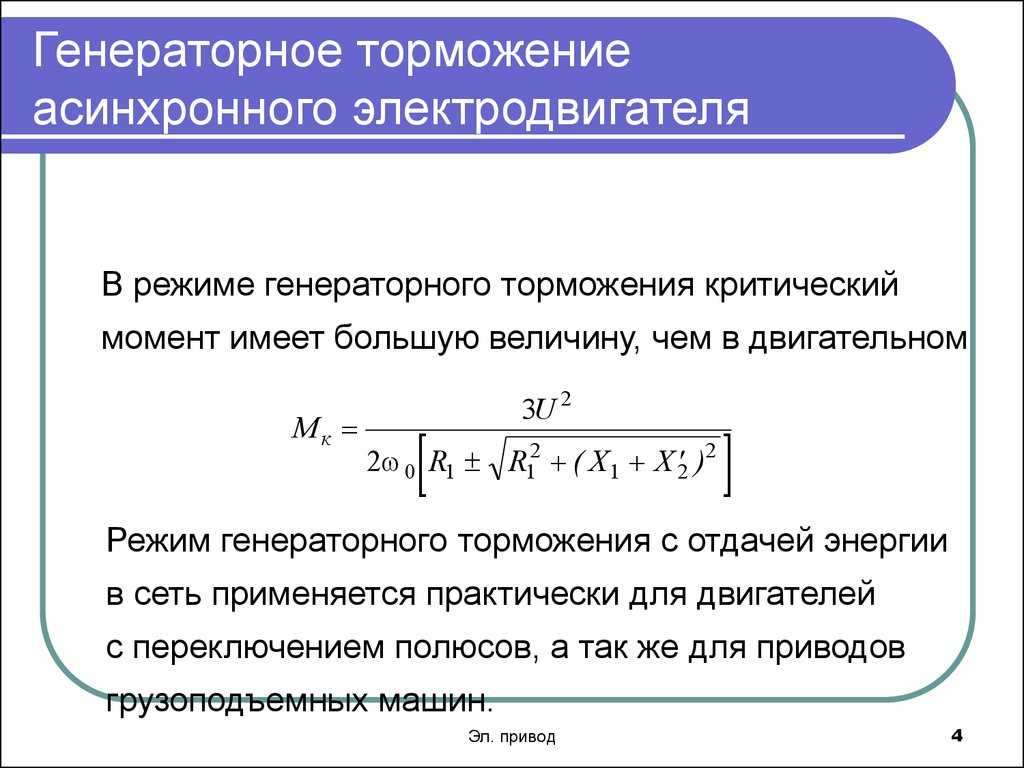
При использовании этого метода двигатель останавливается за короткое время. Но кинетическая энергия, запасенная в нагрузке, рассеивается в виде тепла. Поэтому во время торможения выделяется очень большое количество тепла. А также, если статор подключен к источнику питания, он также вырабатывается в виде тепла. Следовательно, необходимо отключить питание статора перед входом в режим торможения.
- Запись по теме: Уравнение мощности, напряжения и ЭДС двигателя постоянного тока
Характеристики крутящий момент-скорость асинхронного двигателя
Характеристика крутящий момент-скорость представляет собой кривую между крутящим моментом и скоростью асинхронного двигателя и показана на рисунке ниже.
Приведенное ниже уравнение дает скорость вращения ротора, при которой достигается максимальный крутящий момент.
Н М = N S (1 -S M )
Уравнение максимального крутящего момента:
Здесь мы видим, что максимальный крутящий момент не зависит от сопротивления ротора. Но точное расположение максимального крутящего момента зависит от сопротивления ротора. Чем больше значение сопротивления ротора, тем больше значение скольжения, при котором достигается максимальный крутящий момент.
Но точное расположение максимального крутящего момента зависит от сопротивления ротора. Чем больше значение сопротивления ротора, тем больше значение скольжения, при котором достигается максимальный крутящий момент.
Из кривой момент-скорость видно, что по мере увеличения сопротивления ротора скорость отрыва двигателя уменьшается (максимальный момент остается постоянным).
Related Posts:
- Типы электродвигателей – Классификация двигателей переменного и постоянного тока и специальных двигателей
- Применение электродвигателей
- Однофазный асинхронный двигатель – конструкция, работа, типы и применение
- Трехфазный асинхронный двигатель – конструкция, работа, типы и применение
- Пускатель двигателя – типы пускателей двигателя и методы пуска двигателя
- Пускатель прямого действия — схема подключения пускателя DOL для двигателей
- Расчет размера кабеля для двигателей LT и HT
- Методы управления скоростью двигателя постоянного тока
- Машина постоянного тока – конструкция, работа, типы и применение
- Серводвигатель – типы, конструкция, работа, управление и применение
- Бесщеточный двигатель постоянного тока (BLDC) – конструкция, принцип работы и применение
- – типы, конструкция, работа и применение
- Что такое КПД двигателя и как его повысить?
- Асинхронный двигатель и линейные асинхронные двигатели Формулы и уравнения
- Что такое мотор-генераторная установка и как она работает?
- Как запустить трехфазный асинхронный двигатель от однофазного источника питания?
- Формулы и уравнения в области электротехники и электроники
- Символы электродвигателей
Шаговый двигатель
Показать полную статью
Связанные статьи
Кнопка «Вернуться к началу»
Что такое скольжение в асинхронном двигателе? Объяснение, формула и ее значение
В этой теме вы изучаете скольжение в асинхронном двигателе.
В асинхронном двигателе ротор не может работать с синхронной скоростью. Если он работает с синхронной скоростью, не будет относительного движения между вращающимся магнитным полем, создаваемым статором, и проводниками ротора. В результате не будет ЭДС индукции и тока в проводниках ротора. Следовательно, крутящий момент не будет создаваться. На самом деле скорость двигателя настраивается так, что величина тока ротора как раз достаточна для создания крутящего момента, равного требуемому потерями ротора и нагрузкой на двигатель, если таковая имеется. Например, на холостом ходу тормозящий момент возникает только из-за механических (трение и ветер) и других потерь холостого хода. Следовательно, скорость почти достигает синхронного значения. При приложении нагрузки скорость падает. Таким образом, ЭДС ротора и ток увеличиваются. Таким образом, двигатель удовлетворяет повышенный спрос на крутящий момент. Скорость ротора относительно скорости вращающегося магнитного поля, создаваемого статором, известна как абсолютная суппорт или только суппорт (или иногда скорость скольжения. Другими словами, скольжение — это разница между синхронной скоростью (N s ) и фактическая скорость (N) ротора. Обычно выражается в долях или процентах от синхронной скорости. Таким образом, дробное скольжение,
Другими словами, скольжение — это разница между синхронной скоростью (N s ) и фактическая скорость (N) ротора. Обычно выражается в долях или процентах от синхронной скорости. Таким образом, дробное скольжение,
\[\text{S}=\frac{{{\text{N}}_{\text{S}}}-\text{N}}{{{\text{N}} _{\text{S}}}}…(1)\]
И процентное скольжение,
\[\text{S}=\frac{{{\text{N}}_{\text{S} }}-\text{N}}{{{\text{N}}_{\text{S}}}}\times 100\]
Преобразовывая уравнение (1), получаем
\[\text {N = }{{\text{N}}_{\text{S}}}(1-\text{S})\]
При пуске N = 0. Следовательно, значение скольжения равно 1. Значение скольжения при полной нагрузке составляет примерно от 4 до 5 % для небольших двигателей и примерно до 2 % для больших двигателей.
Измерение скольжения асинхронного двигателя
Ниже приведены некоторые наиболее часто используемые методы измерения скольжения асинхронного двигателя. помощи тахометра. Затем скольжение рассчитывается на основе информации о синхронной скорости машины с использованием уравнения 9. 0038
0038
\[\text{S}=\frac{{{\text{N}}_{\text{S}}}-\text{N}}{{{\text{N}}_{\text {S}}}}\]
Измерением частоты ротора
Поскольку частота ротора очень низкая, ее можно точно измерить с помощью милливольтметра постоянного тока с подвижной катушкой (или гальванометра) с нулевым центром. включен в цепь ротора. На рис. 1 (а) показан способ подключения милливольтметра вместе с его защитным сопротивлением через контактные кольца асинхронного двигателя с контактными кольцами. В случае асинхронного двигателя с короткозамкнутым ротором можно индуктивно снять некоторое напряжение частоты ротора, подключив милливольтметр с его защитным сопротивлением к концам вала двигателя, как показано на рис. 1 (б), или подключив его через большую плоскую поисковую катушку с множеством витков, расположенную по центру на торцевой пластине на неприводном конце двигателя. Частоту ротора определяют путем подсчета числа полных колебаний, совершаемых стрелкой милливольтметра вокруг своего среднего нулевого положения в секунду.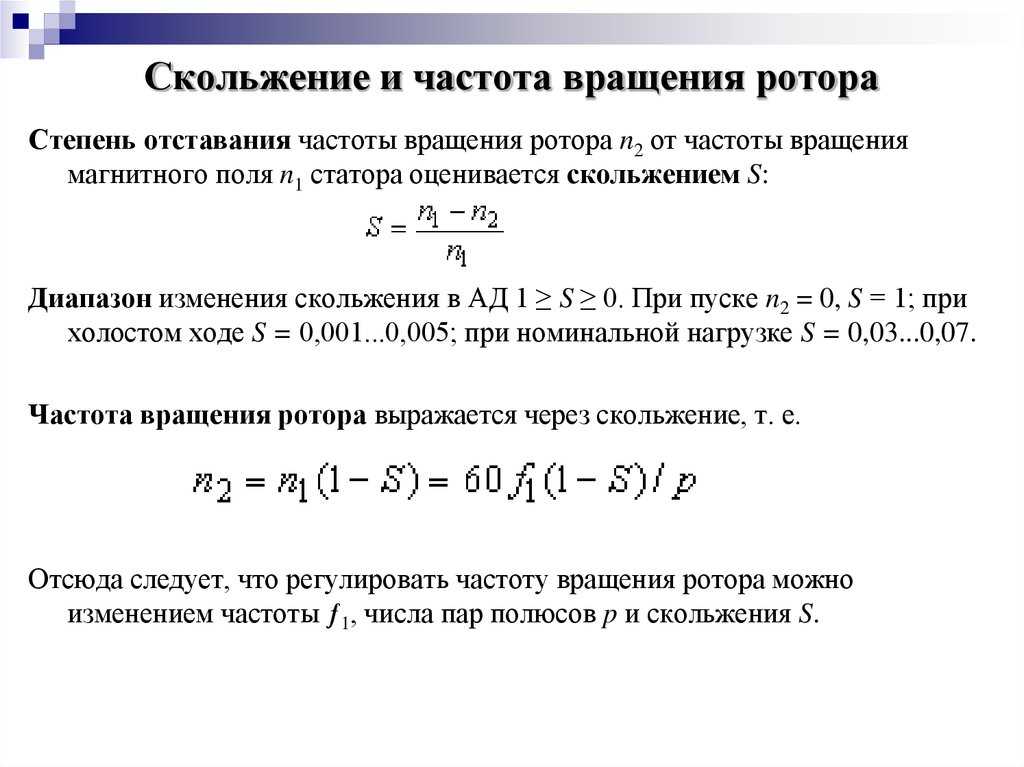 Затем скольжение определяется с помощью соотношения между частотой питания и частотой ротора следующим образом:
Затем скольжение определяется с помощью соотношения между частотой питания и частотой ротора следующим образом:
\[\text{S = }\frac{\text{Частота ротора}}{\text{Частота питания}}\]
Рис. 1.25: Измерение скольжения асинхронного двигателя путем измерения частоты ротора (а) Асинхронный двигатель с контактными кольцами, (б) Асинхронный двигатель с короткозамкнутым ротором.
Стробоскопический метод
В этом методе к концу вала двигателя прикрепляется диск с чередующимися черными и белыми секторами, как показано на рис. 2. Количество черных и белых секторов на каждый диск равен числу полюсов двигателя. Диск освещается неоновой лампой, подключенной к выводам двигателя напрямую или через трансформатор. Такая лампа имеет типичную характеристику, состоящую в том, что она загорается дважды в цикле, когда напряжение выше определенного предела. Если бы скорость двигателя была синхронной, каждый сектор на диске сместился бы вперед на шаг полюсов за период полупериода.